ETNA
advertisement

ETNA
Electronic Transactions on Numerical Analysis.
Volume 26, pp. 320-329, 2007.
Copyright 2007, Kent State University.
ISSN 1068-9613.
Kent State University
etna@mcs.kent.edu
SINGULAR VALUE DECOMPOSITION
NORMALLY ESTIMATED GERŠGORIN SETS
NATACHA FONTES , JANICE KOVER , LAURA SMITHIES , AND RICHARD S. VARGA
Abstract. Let
denote a finite-dimensional square complex matrix, and let
denote
a fixed singular value decomposition (SVD) of . In this note, we follow up work from Smithies and Varga
, (which satisfies
[Linear Algebra Appl., 417 (2006), pp. 370–380], by defining the SV-normal estimator
), and showing how it defines an upper bound on the norm,
, of the commutant
of and its adjoint,
. We also introduce the SV-normally estimated Geršgorin set,
, of
, defined by this SVD. Like the Geršgorin set for , the set
is a union of
closed discs which
is zero,
is exactly the set of eigenvalues of ; when
contains the eigenvalues of . When
is small, the set
provides a good estimate of the spectrum of . We end this note by
expanding on an example from Smithies and Varga [Linear Algebra Appl., 417 (2006), pp. 370–380], and giving
and
, the reduced
some examples which were generated using Matlab of the sets
SV-normally estimated Geršgorin set.
%&+ ! " $ #
&
%
(
)
'
*
,.0- /
132546879: <;
3
1
5
2
4
8
6
9
7
=
>
<
;
!
1 52 4&6 7A B ; 1?2546879@ <;
1 254&6 7AB ; 1?C 2546 79:D ;
Key words. Geršgorin type sets, normal matrices, eigenvalue estimates
AMS subject classifications. 15A18, 47A07
EGFHE
1. Introduction. In [6], we developed a theoretical analysis of how the set of all singular
value decompositions of an
complex matrix can be used to estimate the eigenvalues of
the matrix. Because our methods were motivated by functional analysis, that work allowed
to be countably infinite, but throughout this note, is finite and is a fixed
complex
matrix. The purpose of this note is to introduce the SV-normal estimator
, of and
to define an associated Geršgorin-type set of ,
. The set
,
which contains the eigenvalues of , is the union of
closed discs in the complex plane.
The SV-normal estimator is a parameter between and ; it is when
diagonalizes
in some orthonormal basis of
, i.e., for each
, the -th column of
is a unit length complex multiple of the -th column of . This happens for some SVD
of if and only if is normal. In this case, our SV-normally estimated Geršgorin set is
exactly the set of eigenvalues of . Of course, the more computationally useful observation
is that when
is small, the centers of the discs, comprising
, are good
estimates of the eigenvalues of .
We begin by recalling some standard notation and definitions. Throughout this note,
elements of
are
matrices, and the inner product of
is denoted by
. The norm on
, induced by the inner product, is
IX
I
K LNP I
I
EKMLON"P F( E I E
J
I QORTSVE UWYX[Z\ M]
Q=RTS^U_W`X(Z\ a]
b fhgGcjc ilkaklkTim_b njo?p"W`I X(] Z\ f
f
\
QORTSVUqWYX[Z\ l]
E
d0e
I
I
I
u=ivxwyd0e Vu8l}g
z u=iv|{~}gdre e 8
u EsVv Ftc
d0e
?e 8
0 u , and the corresponding operator norm on Iwd e5e is defined as VI g
T . Finally,
the Frobenius inner product of the matrices of iIwDde~?e is de&
]
] , and the corresponding operator norm is denoted as
note here as W`iI
¡
}
J
g
=
¢
<
£
j
n
a
¤
j
¥
¦
W
I
¨
]
VI }¡gx§ W`IhiI .
A singular value decomposition of a non-zero complex EyFE matrix I is an expression
of I as a product I©gªXZ\
, where X and \ are unitary matrices in d0e5e , and Z
«
¬
Received August 17, 2006. Accepted for publication March 26, 2007. Recommended by Z. Strakos.
Department of Mathematics, Westminster College, 160 Hoyt Science Center, New Wilmington, PA 16172-0001
(fontesnc@westminster.edu).
Main Hall, Room 409, Kent State University - Stark campus, 6000 Frank Ave. NW, North Canton, OH 447207599 (jkover@stark.kent.edu).
Department of Mathematical Sciences, Kent State University, P. O. Box 5190, Kent, OH 44242-0001
( smithies,varga @math.kent.edu).
320
ETNA
Kent State University
etna@mcs.kent.edu
SINGULAR VALUE DECOMPOSITION NORMALLY ESTIMATED GERŠGORIN SETS
d*e5e
321
I g
I
}
¡
­
g
I
I
I
I
I
.
­
g
(
X
Z
\
\d­e~Z?X e X[Z\ g®\­Z \\
\
\ \¯g\\ g®°V± w
e
d
I
\
²´³ µ? ¶ µe O
I
Z}gt·¹¸9nº3W`³
i³ ilkakakTi³ e ] i
where ³
¼» ³ » iakaklkTi » ³
e » b . Similarly,
the columns of X form an orthonormal basis
of dre consisting of eigenvectors of I g®II .
The singular value decomposition of I is never unique. Clearly, any unitary matrix ½
] ] . The
which satisfies ½ZygZq½ defines another SVD of I , namely, I¾g¿W`X[½ ZÀW`\­½
conditions, ½ZGgÁZq½ and ½ ½g|½½
gJ°V±ÂwÃd8e?e are not only sufficient to define
another SVD, but also necessary. This was first pointed out to the authors by Roger Horn.
. Because we will need to use the specifics of
is a non-negative diagonal matrix in
this development, we will recall a construction of a singular value decomposition for in
detail. The square of the absolute value of is
. If
then
. Since is assumed to be unitary (i.e.,
), the columns of must form an orthonormal basis of
, consisting of eigenvectors
of
. We assume, without loss of generality, that the columns of
are arranged so that
the corresponding eigenvalues
of
are in non-increasing order. Thus,
Professor Horn directed our attention to the discussion of [3, Theorem 3.1.1]. One of the
referees of this note pointed out that the following lemma is also developed (for non-square
matrices) in [1] and [4].
L EMMA 1.1. Let be a non-zero
matrix, and let
and
be two
SVDs of , where
EÄFDE
X[Z\
ÅBZ@Æ
ZÇg®·¹¸Ènjº3W¦³
ilkaklki³
i³3jilkaklkTi³iaklkakTi³ÉiakaklkTi³3ÉibiaklkakTib ] i
and ³"Ê has multiplicity ËOÊ , for ÌÍgycjiaklkakTiÎ_Ï®c . Then, there exists a collection of matrices
each ½ Ê is an Ë Ê FÑË Ê unitary matrix, and Ë ÉÒ
FÓË ÉÒ
unitary matrices,
Բн Ê and¶ ÉÊ OÕ
where
such that for
Ô }g·¹¸Ènjº"W½
iakaklki<½ É i Ô ] i and Õ}g®·)¸9nºWY½
ilkakakTi^½ É i&Õ ] i
Ô and Æ×gJ\ØÕ hold. Moreover, if is non-singular, then X \Ùg
the relations ÅÖgÁX
Å Æ.
Given an EF)E matrix I , one can construct an SVD of I as follows. Let I }gtI I .
Then, I is a self-adjoint matrix which is non-negative, in the sense that for all column
z I u=iu{ is a non-negative number. Hence, there are known robust
vectors uØwtdre ,
numerical packages which, for E not too large, can provide us with an accurate orthonormal
basis ²lÚ µ ¶ µ e O
for d8e , which are eigenvectors of I . Furthermore, we can, without loss
of generality, assume that these eigenvectors satisfy I Ú µ g$³ µ Ú µ , and that the associated
eigenvalues are ordered so that ³
» ³3 » kakak » ³
. The collection of numbers
e » theb eigenvalues
µ²M³ ¶ µe O
is called the set of singular values of I . They are
of I g § I .
Let Û index the smallest non-zero singular value ³"Ü , i.e., ³ g­b for all Ý@{Û . Then,
] l]
] have dimension ß}¡gxEàáÛ . Fix
Ûanyisorthonormal
the rank of I . Both kernels ÞH¥a£lW`I and ÞH¥a£MW¦I
, and define the vectors ä µ by
basis ²aâ Ê ¶´ãÊ O
of ÞH¥a£lW`I
µä }gGå æaç â Iµ Ú µ ¸¸è3è3³³ µµ g®{Ãbb W¦W¦¸`¸`éé¥j¥jéaéaii¸¸è
è
fëfëêÇ{ÇÛÛ ]] ié
The vectors ²´ä µ ¶ µ e O
, defined above, form an orthonormal basis of d*e , consisting of eigen
vectors of I . Let X be the EìFBE matrix whose f -th column is the vector ä µ , and let
ETNA
Kent State University
etna@mcs.kent.edu
322
N. FONTES, J. KOVER, L. SMITHIES, AND R. S. VARGA
ZÚµ gt. By·¹¸Èchecking
njº3W`³
iakaklitski³ action
\ to be the EÁF[E matrix whose f -th column is the vectors
e ] . Define
on the basis ²lÚ µ ¶ µ e 8
, it is easy to see that
kakak ðñ íò ³
.b b ðñ ó íò à . Ú@ .
ô à . ðñ ó
.
.
.
.
(1.1)
IxgX[Z\ gíî ä kakakakakï
k ä e î bb b . ³ b e î à . Ú: .eô à . é
As Lemma 1.1 above suggests, the choice of the vectors ²´ä µ ¶ µ e O
and ²lÚ µ ¶ µ e O
, in the
above construction of an SVD of I , is somewhat arbitrary for fÇ{õÛ . Even if the kernel
of I is trivial (i.e., ÛªgØE ), the singular value decomposition, given by the above development, is not uniquely determined. Specifically, the vectors ²lÚ µ ¶ µ e 8
can be replaced with any
orthonormal basis of eigenvectors for I . However, the matrix Z is the same for every singular value decomposition of I . A consequence of the non-uniqueness of the singular value
decomposition is that the SV-normal estimator K L=NP and the corresponding Geršgorin type
a] , which we define below, depend on the choice of SVD of I .
set Q=RTS^U_W`X(Z\
Let I be a non-zero E¿FE matrix of rank Û and fix a singular value decomposition of
in (1.1). The components of this SVD of I can be used to express I as a sum of rank
Ione, asoperators
dre5e . Specifically, for any fixed f , ³ µ ä µ Ú µ µ isz the rankµ one EöF E matrixµ
µ³ ä µ W Ú µ ] ô . Itintakes
any uÃwÃdre to the complex multiple ³
u=iÚ { of the vector ä .
Thus,
Ü
÷
÷
e
Ixg O
³ ä Ú g øO
³ ä Ú é
2. Lemmas. Using an expression of I as a sum of rank one operators, given by the
SVD, X(Z\ , we now define the parameter K LON"P , called the SV-normal estimator, which,
in essence, measures how close the given SVD is to directly defining a spectral decomposition.
D
2.1. Let I be a non-zero E¿FÍE matrix. Let Û index the smallest positive
Ü O
³ ä z Ú
denote
a
singular value of I . That is, Û is the rank of I . Let IGgX[Z\
g
fixed SVD of I . Define the SV-compatibility index of this SVD, Ûúù as follows: if ä i&Ú
{¹g
b , set ÛDù0gõb . Otherwise, let ÛDù be the maximal number which is less than or equal to Û
such that
z ä iÚ {¼gtû b for all Ýg­cjiaklkakTiÛ ù é
We say the SVD is fully compatible (with our methods) if Ûúùg¾Û . We remark that full
compatibility is only needed for the construction of the reduced normally estimated Geršgorin
a] , defined below. Set
set, Qü"RTS^U_W`X(Z\
K }g § cqà z ä iÚ { iýÝ=g$ciakaklkTiÛÓi
EFINITION
and define
KVLNP }gþënÿ"²´K ¶ Ü O
é
We call KVL=NP the SV-normal estimator of I , defined by this SVD.
By the Cauchy-Schwarz inequality, each K satisfies bÍê®K ê­c . Moreover, if ÛBùg
û Û,
then K LNP g©c . The next lemma sheds some light on our motivation for defining the
ETNA
Kent State University
etna@mcs.kent.edu
323
SINGULAR VALUE DECOMPOSITION NORMALLY ESTIMATED GERŠGORIN SETS
K
®gu3u àDv
v é
parameters above. We would like to thank the referees for pointing out a simplified proof
of this lemma.
L EMMA 2.2. Let and be unit vectors in
, and define the
matrix by
Then, the norm of ,
, is given by
u
v a [ d0e
V( g § cqà z Ou i&v{ é
EFúE
u z v Ou i&vÓ{ gyc
»
E
ª
E
F
E
V (
EöFÑE
z
z
g® gÃu3u à u=ivÍ{Çvu à v"iuÑ{Çu3v Ï vv é
z u=ivÑ{ ] u and vgGW¨c¹à z uOi&vÑ{ ] v .
It is easy to calculate that u gyW&c)à
That is, when u and v are linearly independent, the two non-zero eigenvalues of are
z
cqà TheuOSV-normal
i&vÍ{ . estimator
K LON"P , defined by the SVD of I , X[Z\ , provides an estimate on the commutant of I and I , as described in the following lemma.
L
2.3. Let Iw d0e5e and let K L=N"P denote the SV-normal estimator, defined
from the SVD X[Z\
of I . Then,
VI I­àBI[I ê¿aI K LNP é
Proof. Let I be an E¾FÑE matrix and let ÛÄê®E index the smallest non-zero singular
Ü 8
³ ä Ú denote a fixed SVD of I . Then, I g
ª
g
value of I . Let I©g¾X[Z\
\­ZX gØ øÜ O
³ Ú W`ä ] . Hence,
Ü ÷ Ü
÷
VI I$àúII a_gx O
³ Ú Ú àúä ä VHê O
³ ^Ú Ú àúä ä V
Ü
g ÷O
³ K êÇK LON"P ¢O£n¤V¥jW I ] g®K L=N"P VI é g øÜ O
³ is independent of the choice of SVD of I . It
Note that the factor aI
is a measure of the scaling of I . The other factor, KlLNP , depends on the specific SVD,
X[Z\ of I . It is a number which measures how close a given SVD is to directly defining
a spectral decomposition. More precisely, K LNP gØb when the columns of \ comprise an
orthonormal basis of d e , consisting of eigenvectors of I . When the parameter K L=N"P is
Proof. If and are linearly dependent, the lemma is clearly true. In this case, is the
zero matrix and
. Otherwise,
and is an
matrix of rank 2.
Since is self-adjoint,
is the largest eigenvalue of the
matrix
EMMA
small, the SVD can be expressed as the sum of a normal matrix and a matrix whose norm is
small. In this case, the given SVD yields an inexpensive and accurate estimate of eigenvalues,
as described below. This estimate can be far more accurate than the usual Geršgorin estimates
of the eigenvalues; see Section 4, below.
Qü"RTS^U_W`X(Z\ a]
a]
8
Q
T
R
^
S
_
U
`
W
(
X
Z
\
[X Z\ I EFúE
I
Û êÃE
¾
3. Theorems. In this section we define the Geršgorin-type sets
and
, corresponding to a fixed SVD
of an
matrix . We also
show that each of these sets contains all of the eigenvalues of .
D EFINITION 3.1. Let be an
matrix and let
index the smallest non-zero
singular value of . Let
I
I
EyF~E
Ü
IxgX[Z\ g ÷ø O
³ ä Ú
ETNA
Kent State University
etna@mcs.kent.edu
324
N. FONTES, J. KOVER, L. SMITHIES, AND R. S. VARGA
Ûù
ÛBù=g­b I
Q RTS^U W`X(Z\ ] }g W¦b?i´VI V ] } g$²¼w dý} ê$aIV ¶ é
Now, assume cHêÂÛDùêÇÛ and set
Ü ­}g ÷O
³ K é
(3.1)
and set ! }g¾³ "# .
For consistency of
For each ÝëgÄcjiaklkakTiÛÓù , set }¡g
z
}¡gb the, andSV-normally
g b . Set $ }g
notation, if ÛDù
if ÛDù_g E , define ³ Ü Ò
þ¼¸øo²MEÑiÛÓùÏtc ¶ . ForE define
ÛÓù0gtû b! ,Ü we Ò define
estimated Geršgorin set as
] }&g %(' O
W ! #i ϳ Ü Ò
] }g %(ø' O
² ¼w dý} ")à ! *ê Ï~³ Ü Ò
¶ é
(3.2) Q RSVU WYX[Z\
Next, we show that for each SVD of any fixed matrix I¯wxd*e?e , its SV-normally
l] necessarily contains the eigenvalues of I .
estimated Geršgorin set Q=RTSVUWYX(Z\
T
3.2. Let IÁw dre?e and let X[Z\
denote a fixed SVD of I . Then, the set
l] .
of eigenvalues of I is contained in the SV-normal Geršgorin set Q8RTSVUqWYX[Z\
Ü
O
³ ä Ú denote a fixed SVD of I . Let ÛDù be the
ª
g
Proof. Let I g¾X[Z\
compatibility index of this SVD, and let + be an eigenvalue of I , where Iu$,
l] . This containment is trivialg if+ÛBu ù3with
since
^urV)g + c g . WeVIshow
gtl]b
that + is in the set QORSVU_W`X[Z\
8
u
a
H
Ø
ê
V
I
V
. Now suppose c~êÇÛDùêÂE . In this case, the set Q=RTS^UqW`X¼Z\
¶ , and for all ÝHg¿ciakaklkTiÛDù , is defined as in (3.2). Recall that $
Á
g
¼
þ
ø
¸
T
o
´
²
Ñ
E
i
D
Û
"
ù
Ï
c
denotes the complex rotation - and ! }g³ "# . For consistency of notation, let
³ e Ò
}¡gtb and ! Ü Ò
}gb . For- c~. êÂ/. ÝrêÂÛDù , define 0 w dre by 0 }¡gä 1à ¦Ú . Then
2 0 g z ä 1à z ¦Ú iä 1à ] Ú {¹g z à m_¥jW 435 ] z ä i Ú { ]
(3.3)
g W¨cqà ä iÚ { ê W&cà ä i&Ú { g K é
Thus, 2 0 VÓê K , for all ÝHgöcjilkaklk&ÛDù . We can use the vectors 0 to rewrite I as the
sum of a normal matrix and two matrices which have small norms when KML=N"P is small.
denote a fixed singular value decomposition of , and let , from Definition 2.1, denote the
compatibility index of this SVD. If
, define the SV-normally estimated Geršgorin set
to be
HEOREM
Specifically, let
Ü ]
Ü ]
÷
÷
÷Ü ³ ä Ú é
(3.4) $}¡g
and 8x}g
!
ä
`
W
ä
7
i
G
6
}
g
!
ä
.
W
0
i
8
O
Ü ÈÒ
Then, Ixg®à16tÏ98 since
Ü ] ÷Ü ] ÷ Ü
÷
1à 6t9Ï 8g O
! ä W`ä à 8
! ä W.0 Ï Ü Ò
³ ä Ú
÷g Ü ! ä W`ä à10 ] Ï ÷ Ü ³ ä Ú g ÷ Ü ³ ä Ú gtIÍé
O
Ü Ò
8
ETNA
Kent State University
etna@mcs.kent.edu
SINGULAR VALUE DECOMPOSITION NORMALLY ESTIMATED GERŠGORIN SETS
²! ¶ Ü O
b
Eà úÛ ù
325
, and
The matrix in (3.4) is normal. Its spectrum consists of , with multiplicity
the elements of
. For each complex number , which is outside the spectrum , we
have the following formula for its distance from the spectrum of :
:
; W<:5i³0W` ] ] } gÙ=> þ¼¸øo ² :[àED ¶ g
æ@?BAC
È W`àF:?c ° ] 3
ø é
This distance formula holds since is normal; see [2] or [5].
;
]&] êyI8ë Ï$J6Í ,
Recall that IuBgG+u with È u ø gyc . We will show that WH+=i³0W¦
]
where 6 and 8 are defined in (3.4). If D
+ w ³0W¦ , then we are done. Otherwise, we have the
above equality to calculate the distance of + from the spectrum of . Now
c¹g È u ø g W¦tàF3+ ° ] 3
W¦àE+ ° ] ur êW`àE+ ° ] 3
V)uhàF+ u8 é
; + i³0W` ]&] ê È _uëà1+ u È g È )uëàDIu ø g ø WH®8 àK6 ] u È ê È ®8 àK6 ø ê
This gives us WH=
ø 8 È Ï È 6 È é
It remains to show that Jë
8 ÏJÍ6 êt
ÏÇ³Ü Ò
where is defined in (3.1) and 6
and 8 are defined in (3.4).
Let v be a fixed unit vector in d0e . Parseval’s theorem implies that
Ü z ÷ Ü ÷ Ü
÷
L~6 v g 8
! vi0 { ê øO
³ L0 g øO
³ K é
Thus, JÍ
6 êM
. Moreover, Jë8 êy³Ü Ò
. If ÛDù@gJÛ , then 8 is the zero matrix and
³Ü Ò g®b . Otherwise, for any unit vector v ,
Ü z ÷ Ü
z
÷
JÀ8 v g Ü Ò
³ viÚ { ê Ü Ò
³ Ü Ò v"iÚ { êó Ü Ò ^v é
Combining these estimates for the norms of 6 and 8 , we have shown that any eigenvalue
of I is a most the distance (
Ï~³3Ü Ò
from an element of the spectrum of . This exactly
a] . says
the eigenvalues of I are contained in the SV-normally estimated set QrRTS^U_W`X(Z\
[X Z\
cjilkakakTiÛ Û
Q RTS^U W`X¼Z\
g Û ³ K hÝ gcjilkakakTiÛ
X(Z\ g®E FBÜ OE
³ I ä Ú I
-- .. //..
Ý
Q ü"RTS^U W`X(Z\ ] }gز ¼wÑd} àB³ "# ê
z] ä i Ú {¼I g û b
Ýg
Ïá³3Ü Ò
ÏÇ³Ü Ò
Û
The above development has a useful reformulation for the case when has sufficiently
small rank
and the SVD,
, is fully compatible (i.e.,
for all
). Notice that all of the circles in the set
have radius
.A
more detailed examination of the above proof allows us to replace
with a family
of radii
, for
. Since each radius has a factor of
, this
reformulation is only useful when the rank of is small.
D EFINITION 3.3. Let
denote a fixed, fully compatible, singular
value decomposition of a non-zero
matrix . For each
, let
, and define the the -th small rank SV-normally estimated Geršgorin disc to be the
set
Define the small rank SV-normally estimated Geršgorin set of
to be the set
I
Ý~g¾cjiaklkakTiÛ
N"#g
Û ³ K¶ é
which is given by this SVD
Q ü3RTS^U WYX[Z\ ] }¡gO% Ü O
Q ü"RTS^U W`X(Z\ ] %QPhi
where P is the empty set if Ûg®E and ²Mb ¶ otherwise.
ETNA
Kent State University
etna@mcs.kent.edu
326
N. FONTES, J. KOVER, L. SMITHIES, AND R. S. VARGA
Û
Q=ü"RTS^U_W`X(Z\ a] K LONP Û I R
Ü
denote a fixed, fully compatible SVD
T
3.4. Let I¾wÃd e5e and let X[Z\
of I . Then, the set of eigenvalues of I is contained in the small rank SV-normally estimated
a] .
Geršgorin set Q=ü"RTS^U_W`X(Z\
Ü O
³ ä Ú denote a fixed, fully compatible
Proof. Let I×gÁX[Z\
SVD of I .
g
g
+u where ^urV¼g|c . Since the SVD is fully compatible, z ä iÚ {¼gGû b for all
Let IuS
ÝgciaklkakTiÛ . For each
Ý=g$cj ilkaklkTiÛ , let T"# denote the complex rotation
. Define
0 w d e by 0 }g®ä Kà Ú . Recall from (3.3) that L 0 ê K , for cÀêÃÝ8êÂÛ . We can
use the vectors 0 to write I as
Ü ] ÷Ü ] ÷Ü ]
÷
Ixg O
³ ä W Ú g O
³ ä W`ä à 8
³ ä .W 0 é
The equation Iu O
g +?u for +úg®û b implies that u is in the range of I and hence in the span of
the vectors ²´ä ¶ Ü O
. Thus,
Ü z
÷
+?u g&+ O
u=iä {Ãä é
Next, we show that the small rank SV-normally estimated Geršgorin set contains the
will
eigenvalues of the matrix. Of course, unless the rank, , of is small, the factor
tend to make the set
too large to be useful. More precisely, this estimate is
useful only when the SV-normal estimator,
, is smaller than
.
HEOREM
On the other hand,
Ü
Ü
Iug ÷øO
³ z u=i<ä {Ãä à ÷O
³ z u=i#0 {Âä é
Equating coefficients of the orthonormal vectors ä gives us
W¦³ "# Eà + ] z u=i<ä {¹g®³ z u=#i 0 { for all ÝTg­cjilkaklkTiÛ é
z u=#i 0 { ê.³ L0 aÑê ³ K . Moreover,
By the Cauchy-Schwarz inequality, ³ Ü
z
u=i<ä { , there must exist an index ß between c and Û such
since ^u8 gGcgx O
z
»
R
u=iä ã { Ü . For this index, the above calculations yield
that
+hàB³ ã "#U ê Û ³ ã K ã é
l] . This exactly says + is in the ß -th disc defining the set Q8ü3RTS^U_WYX[Z\
4. Examples. We end this note with some examples which illustrate how our methods
work.
E XAMPLE 4.1. As a simple illustration of our methods, we will calculate all possible
IgWV bc ~à b cKX . Then, I gGI I
is the identity matrix on d . The most natural singular value decomposition of I is given by
the choice of the standard basis for d as the eigenvector basis for I . That is,
IxgX[Z\ g V bc à~b c X V bc bc X V bc bc X é
SV-normally estimated Geršgorin sets of the matrix
ETNA
Kent State University
etna@mcs.kent.edu
SINGULAR VALUE DECOMPOSITION NORMALLY ESTIMATED GERŠGORIN SETS
327
Z\
must have the form X
gX[½ and
ª
I
|
g
X
\ gt\­½
½½ g½ ½$gt°V
½$g V 2D Y 35""Z [ à) D23-""Z[ X b¼ê Y i\D¹êc4] Y Ï9D g­cN]qb(ê^+=i_! z a` é
Y
This choice of ½ gives us the SVD factors
ñð
c
b
"
Z
à
)
2
D
B
[
Z
)
à
2
D
B
[
X
gX[½Øg V b à~c X VbDLY N3-B[ 435Z X g Vcà)Y DLN3-B[ à N3-"Z X }¡g íî ä
ä i
Any other singular value decomposition
where
. That is,
Y
Y
\
Øg ½ \ gؽ gdV à)Y D2443535Z"[ D2B[Z X }gdV àà Ú:Ú:
ôô àà X é
z
Y àeD and z ä"i&Y Ú0~{¹gD à Y . First, assume that Y gû D .
For this SVD of I , ä
i&Ú
{¹g
The centers for the normally estimated SV Geršgorin discs from this SVD are ! gf- /g
- /g
for Ý~g¿cji . Thus, the centers are c and à~c , the eigenvalues of I . For ÝHgöc and , the
z
ä i&Ú { gMh Y D . Both of the
SV-normally
constant K is c¹à
Geršgorin
Ï ³ K ] ig estimated
¦
W
³
K
h Y D . For example,
discs constructed from this SVD have radius Jg §
if gyé bc , then DÀg é jNjNj4j[gGé jNj4jNjah@] jNj4k@l@klkak and h D¹gGé 4
Y
Y b mNj4jNj@lajqkaklké The SV-normally
estimated Geršgorin set Q=RTSVUqWYX
Z\
is the union of the closed discs with centers à~c and
c , each with radius] nearly é Nb h . Asà~Yc and
approaches but does not equal D , the centers of the discs
in QRTS^U_W`X
Z\
remain c and
the radius of each disc approaches , from below. In
the extreme case, gbD¹g R , the calculations defining our set would involve a division by
Y
zero. In this case we have defined the SV-normally estimated Geršgorin set to be the closed
disc centered at the b of radius c (i.e., radius aI ).
E
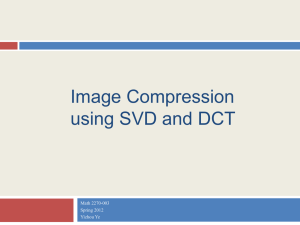
4.2. This example was generated using version 6.1 of Matlab on the matrix
c
b
n
mb ðñ
Ixg íî m?p
cc oh b o?k c é
The asterisks in Figure 4.1 denote the eigenvalues of I . The union of the very small (maa] .
genta) discs around these asterisks is the SV-normally estimated Geršgorin QrRTS^U_W`X(Z\
]
The large (green) discs are the Geršgorin circles in the Geršgorin set of I , Q:W¦I . This example shows that when our method is applied to a matrix which is normal, or almost normal,
l] can be a much better estimate of the] set
the set of the centers of the discs in QORTS^U_WYX[Z\
of eigenvalues of I , than the eigenvalue estimates given by the usual Geršgorin set, QW`I .
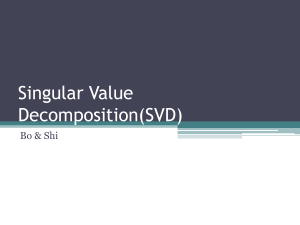
clb(FBEclb matrix of4.3.rankOurm , Ixlastg example was generated using version 6.1 of Matlab and theðó
cíò bqéé mlaNbr?rc bbéé moNNbrjjb b?b?sésé lÐl b?Nc à_b?é bmNé j4b o l bbéé r4o4ko bcéøé 4bc rNm@rl à_b?qé boTéøhNTc h l b?b?qésé oTlTh@m4jj à_b?éÈbIc é j@4b o m à_b?é br?é cojc b óóó
òòò bé r4j@l béql o b?é jNj b?é h@oak béqlakNr bé rNr b?é r?cJh b?é jNkc b?é bjb b?é rNm@o óóó
òòò à_bé bré lNb l l bbéé m4o4jaoahm b?b?ésé h@lTkNoakr b?b?éqé jjoa@bmNkl bbéqé oNl5mNIc rk bbéé oNo@mNlNjl b?b?éé hhNbb k b?b?éqé boak@bo b?b?éé jNmNmjc b?cjéqé Nboar4k4rk óóó
òòò céøcr bé b4m b?é rNr b?éqoamNj bé o@lNl céqlam?c à_bé m4j à_bé ho cjé mNjl b?é bah óóó é
òòò à_bé boaéøhc l k bbéqé oalThhNhl b?b?éé r?jNk?Jc hc b?b?éé hb Nb kb bbéé hoNbk4o à_à_b?b?é mNé h@k@o o b?b?ésé rNlTkjmjbb b?cjséé mNlTmk4br à_à_bbéé k@bo b?b?séé mNlTm4jNhr ñ ó
òî béøccIk à_bé bNh à_bé bc b?é jNrah bé m4k?c cé m4rNk à_b?éÈcIk à_bé kl cjéslNlb b?éslTm4j
à_bé h@j bé r4b o b?é rNmjb cjé 4b o5c bé oNkNm bé Nb h@o b?sé lTkNm b?é mNmNh b?é r@lar cjé h4k4j
and
XAMPLE
XAMPLE
ETNA
Kent State University
etna@mcs.kent.edu
328
N. FONTES, J. KOVER, L. SMITHIES, AND R. S. VARGA
152546879: <;
1"79 ;
In Figure 4.2, the set ²Mb ¶ and the union of the three smallest (blue) discs is the reduced SVF IG . 4.1.
is the small discs (magenta);
is large discs (green).
5
4
3
2
1
0
−1
−2
−3
−4
−5
−4
−2
0
2
4
6
1?C 254&6 7A:B ;
137A ;
l] . The union of the larger circles (yellow)
normally estimated Geršgorin set, QOü"RSVU_W`X[Z\
]
is the standard Geršgorin
QW`I . This example shows that the eigenvalue estimates
l] circles,
given by Q=ü3RTS^UqW`X¼Z\
can be much better than the estimate given by the usual Geršgorin
sets.
F IG . 4.2.
is small discs (blue);
is the large discs (yellow).
ETNA
Kent State University
etna@mcs.kent.edu
SINGULAR VALUE DECOMPOSITION NORMALLY ESTIMATED GERŠGORIN SETS
329
REFERENCES
[1] H. B ERENS AND M. F INZEL , A continuous selection of the metric projection in the matrix spaces,
Addendum, Numer. Math., 57 (1990), pp. 663–667.
[2] I. G OHBERG AND S. G OLDBERG , Basic Operator Theory, Birkhauser, Boston, 2001.
[3] R. H ORN AND C. J OHNSON , Topics in Matrix Analysis, Cambridge Unversity Press, Cambridge,
New York, 1994.
[4] E. M ARQUES DE S Á , Faces of the unit ball of a unitarily invariant norm, Linear Algebra Appl.,
197/198 (1994), pp. 451–493.
[5] M. R EED AND B. S IMON , Methods of Modern Mathematical Physics I: Functional Analysis,
Second ed., Academic Press, New York, 1980.
[6] L. S MITHIES AND R. S. VARGA , Singular value decomposition Geršgorin sets, Linear Algebra
Appl., 417 (2006), pp. 370–380.