ETNA
Electronic Transactions on Numerical Analysis.
Volume 23, pp. 63-75, 2006.
Copyright 2006, Kent State University.
ISSN 1068-9613.
Kent State University
etna@mcs.kent.edu
TOWARD THE SINC-GALERKIN METHOD FOR THE POISSON PROBLEM IN
ONE TYPE OF CURVILINEAR COORDINATE DOMAIN
TOSHIHIRO YAMAMOTO
Abstract. This paper introduces the Sinc-Galerkin method for the Poisson problem in one type of curvilinear
coordinate domain and shows an example of the numerical results. The method proposed in this paper transforms
the domain of the Poisson problem designated by the curvilinear coordinates into a square domain. In this process,
Poisson’s equation is transformed into a more general two-variable second-order linear partial differential equation.
Therefore, this paper also shows a unified solution for general two-variable second-order linear partial differential
equations. The derived matrix equation is represented by a simple matrix equation by the use of the Kronecker product. However, the implementation for real applications requires a more efficient calculation of the matrix equation.
Key words. Sinc-Galerkin method, Sinc methods, Poisson problem, differential equations.
AMS subject classifications. 65N99
1. Introduction. The Sinc-Galerkin method is the numerical method for solving differential equations introduced in [1], which proposes the solution for second-order differential
equations. The solution for higher order differential equations is studied in [2, 3, 4]. The textbook [5] shows its applications for solving Poisson’s equation, the heat equation and Burger’s
equation in a square domain. The textbook [6] collects a wide range of topics involving socalled “Sinc methods”—a class of numerical methods, including the Sinc-Galerkin method,
based on the use of the Cardinal function, which is an expansion of a function using the
Sinc basis functions. These topics are more recently summarized in [7]. The Sinc-Galerkin
method for typical differential equations in a square domain has been well studied in these
and other references. Also, the domain decomposition for rectangular domains and L-shaped
domains is discussed in [8, 9, 10, 11, 12]. However, the case of more complicated domains
has not been studied very much.
This paper introduces the solution of the Poisson problem in a certain type of curvilinear
coordinate domain and points out problems with it. In this solution, Poisson’s equation in the
curvilinear coordinate domain is transformed into a more general two-variable second-order
linear partial differential equation in a square domain. Therefore, this paper first shows a
unified solution for general two-variable second-order linear partial differential equations in
a square domain.
2. The Sinc-Galerkin Method for General Two-Variable Second-Order Linear Partial Differential Equations. To solve a differential equation, the Sinc-Galerkin method derives a matrix equation which corresponds to the differential equation. Derivations of the
matrix equation in response to the type of the differential equation have been introduced in
[1, 2, 3, 4, 5, 6, 7]. This section shows a more unified derivation of the matrix equation for
two-variable second-order linear partial differential equations using integration by parts.
Received July 29, 2005. Accepted for publication December 31, 2005. Recommended by F. Stenger.
Graduate Department of Computer Systems,
(d8031204@u-aizu.ac.jp).
The University of Aizu,
63
Aizuwakamatsu,
Japan
ETNA
Kent State University
etna@mcs.kent.edu
64
T. YAMAMOTO
Let us consider solving the two-variable second-order linear partial differential equation
(2.1)
! "#"
$%
)( !( $ %
&'
)*+!*)
,.-%
&'/
whose boundary conditions are
0
1,32 1,40
$%
&0,
2:,40
06578592 0657;5<2+=
In the Sinc-Galerkin method, by using the sinc function, which is defined by
?
@ ACB&DFE GH I
K,.
J 0
sinc >
GH
2
,.0
L
the basis functions for approximating a one-variable function are defined by
M
ON
QPSRUT$V
sinc
W T$1XKNP P
Y
and the basis functions for approximating a two-variable function are defined by
MSZ#[
M
M
%
&'\<] ^ N
#P_+RUT`_`#a+] b
QP`cd%RUTc'#a
where T%
#T_ and Tc are conformal maps from the domain of the approximated function onto
3Xfe4
#eg , N and b , the subscripts of the basis functions, are integers, and P%
QPH_ and Pc , the
step sizes for the discretization, are positive real numbers. By using the basis functions for a
two-variable function, the approximate solution of (2.1) is represented by the truncated series
(2.2)
m k
hji/hUk'
, [Fnl op
q
where
(2.3)
k
m i
Z!nl oHp
q _r9sK_ 7t
cu9sKc 7o t
Z
9T _o [
9T c i
Z [ MSZ#[
$ &
%
&!
_ 2+
c 2+
^NP _ /
b^P c !=
As noticed from the notation, the coefficients of the basis functions correspond to the values
of the approximated function at the discrete points. The selection of s _ t _ Qs c t c #P _ and
P c for a good approximation is precisely discussed in [5, 6].
Z [
The values of the approximate solution at the discrete points, h i h k' , are determined by the orthogonal conditions
(2.4)
^hji!hUk)
MSZ![
,vO-
MSZ![
!
Nw,xXys _ Xys _ 2+
=z==z
t _ b%,{Xys c Xys c +2 =z==/
t c =
ETNA
Kent State University
etna@mcs.kent.edu
T OWARD T HE S INC -G ALERKIN M ETHOD FOR T HE P OISSON P ROBLEM
TABLE 2.1
and
Values of
|&}
1
2
0
2
1
1
3
0
2
~}
4
1
0
65
.
5
0
1
6
0
0
The inner product is, with its interval adjusted to that of the problem, defined by
O-
3,<
-%
H
))' ` (2.5)
where and are weight functions.
For the differential equation (2.1), the left-hand side of the orthogonal conditions (2.4)
comprises the terms
3H
hUihUk'%
& M%Z#[
(2.6)
Y
where and are set to be 0
z2 or according to ,{2+
Q
=z==/
Q (Table 2).
W '
From the definition of the inner product (2.5), the terms (2.6) are represented by the
integral
HdS
h i h k'%
M
M
] ^NH
QP _ %RUT _ #a>] ^b3
QP c SRUT c #a)'++
which can be transformed into
(2.7)
3 H
M
h i h k'
HXu2 j ] ^NH
QP _ SRUT _ !a%
`
M
] ^b3
#P c SRUT c !a% ` Xu2 U
by using integration by parts multiple times so as to eliminate the derivatives of the approximate solution h i h k . Note that the boundary terms generated by integration by parts
can be assumed
to vanish when
M
M the weight functions and are appropriately set because
h i h k)
^N
#P _ RfT _ and ^b3
#P c 1RT c are 0 at the boundaries. To make this assumption
hold, appropriate functions are selected to be the weight functions and so as to make
these terms converge. The most important problem is about the derivatives of the Sinc basis
functions
M
M
] ^ NH
QPRUT$#a:, O^N
#P`%RUT$1T`!
because the map T from the finite domain
#/
onto
3Xfe4
#eg
X
T$\,+ W
X Y
\
and its derivative is
T >,
X
\
8X'/O\X
is usually set to be
ETNA
Kent State University
etna@mcs.kent.edu
66
T. YAMAMOTO
which has singularities at the boundaries. It means that the derivatives of the Sinc basis
functions have singularities at the boundary. To avoid this problem, it is convenient to set the
weight function to be
2
>,
T so that the terms converge.
In the Sinc-Galerkin method, the integrals of the orthogonal conditions (2.4) are approximated by the trapezoidal rule using variable transformations. To compute these integrals by
the use of the values of the integrands at the discrete points defined in (2.3), the integrals with
respect to from 0 to 2 are transformed into the integrals with respect to ,¡T _ and
approximated by
m i ¤ 2
r£.P`_ n l op
=
$ ' L, 7
o ¢ T _ ¤
i T _ ¤ ¢
Applying the two-variable trapezoidal rule to (2.7) results in
(2.8)
m k
m i
`P _ `P c nl oHp nl oHp hji!hUk ¤ ¥ ¥
k ¤
i
3 H
M
Xu2 ] ^N
#P_SRUT_`#a#§§ _ n _/¨
T _ ¤ ¦
§
M
3Xu2:
] b
QP`c:RUT`c'#a%#§§ c n c#© =
T c ¥
§
Here, the Sinc basis functions and their first-order and second-order derivatives have the
following properties:
ª«
Z #¤ ¬ <] M ^N
#P`SRUT$#a §
§§ _
M
9P ] ^N
#P`SRUT$#a§§ _
T
§
Nw,K¯
,®­ 02 ¡
_
¨
¡
N°,K
J ¯
ª«
?±
0
Nw,K¯%
@A
oZ
Z ¤ ¬
n , ± 3Xu2 ¤
_¨
³N°,K
J ¯%
²
¯
X
N
±?±±
ª«
G X
Nw,K¯%
´
Z ¤ ¬ 4P ] M ^N
#P`SRUT$#a§ n , @ A±±
o¤ Z
± j3Xu2:
§§ _ _ ¨
)T
X
³N°,K
J ¯%=
µ¯wXKN ª«
Therefore, the differentiation parts of of (2.8) can be represented
by
Q
¬
M
] ON
QP`_+%RUT_!a% §§ _ n _ ¨ , Z ¤ ¤ ' ¤ !
§
M
] ^N
#P_%RVT`_ª« #a%§§ _ n _¨
ª«
§
Z ¤ ¬
#¬ Z
¤
¤
¤
,
T` ) ¤v¶ ]: )#a§§ _ n _ ¨z· P`_ _
§
n
ETNA
Kent State University
etna@mcs.kent.edu
67
T OWARD T HE S INC -G ALERKIN M ETHOD FOR T HE P OISSON P ROBLEM
M
] ^NH
QP`_ %RUT_!ª a%« §§ _
Z ¤ ¬ §
ª«
, ]dT_
P _¹¸
Z ¤ ¬
P _ ¶T`_ ¤ ' ¤ ) ¤
n
_¨
¤ #a ¤ ) ¤ º
T_ ¤ ª « ] )!af§§ _ n _/¨ ·
§
#¬ Z
¤ ¶ ] )#a §§ _ n _ ¨· §
for ,90
2+
# respectively. The differentiation parts of are obtained just by replacing the
functions and variable names in the above.
Applying the two-variable trapezoidal rule to the right-hand side of the orthogonal conª« ª«
ditions (2.4) yields
Z #¤ ¬ [ ¥ Q ¬ - ¤ ¥ ' ¤ ) ¥ m k
m i
- ,9P _ P c
P _ P c nl oHp n1l op
¤
¥
T
T
_
c
¥
k ¤
i
Let us define the symbol
»
, )¼µ½¾¼¿½
to be the matrix which has '¼¿½ , a value related to À and Á , as its (À s
element À#
ÁÂ,vXys<
Xys 2+
z==z=/
t .
Z
[
& )Z
T _ T
Z
[
) [ =
c 2 ),(Á s 2
)-th
The orthogonal conditions (2.4) of the problem (2.1) can be represented by the linear
matrix equation
»
»
»
(2.9)
ÃÅÄ;Æ ÃÅÄ;Æ z *dÃÇÄÅÆ* ,.È
where
» Ã , h i h k' ¤ ¥ ¤z¥ , ¶ 3 Xu2 ¦ ] M ON
QP _ %RUT _ !a% § n
§§ _ _ ¨z· Z ¤ T _ ¤
M
Ä , ¶ 3Xu2 ¥ U ] b3
#P c %RUT c '!a%'Q§§ c n c!© · [ T c ¥
§
Z [
Z
[
ÈÉ,ʶ - )Z )Â[ · Z#[ =
T _ T c »
Note that in (2.9) the matrix à is multiplied by , matrices of , from the left and multiplied
by Ä , matrices of , from the right ,v2+
#'
=z==!
Q . Therefore, the coefficient functions of
the differential equation to be solved must be able to be separated with respect to the variables
like (2.1).
qÌËÇq
»
The linear matrix equation (2.9) can be transformed into a simple matrix equation by the
»
use of the Kronecker product and vec-function [13]. Let and Ä be
matrices. The
Kronecker product of the two matrices and Ä is defined by
»vÍ
Ä Ï
, ÎÐÐ
ÑÐ
& Ä
Ä
' Ä
Q Ä
h¦/Ä
h Ä
..
.
..
.
ÔÖÕ
h Ä ÕÕ
h Ä
=
..
. ×
zÒ hUhÓÄ
z
z
ETNA
Kent State University
etna@mcs.kent.edu
68
q
Let Ø ½ FÁÅ,É2+
Q
=z==!
q
, Ø\Ø
denoted by Ù
transforms Ù into the
T. YAMAMOTO
be the Á -th column vector of the matrix Ù . The matrix Ù can be
zØ1h¦ . The operator vec, concatenating these column vectors,
-element column vector which is defined by
ÔÕ
Ø ÕÕ
Ø vecÙÏ, ÎÐ . =
ÐÐÑ .. ×
Ø1h
By using the Kronecker product and vec-function, the linear matrix equation (2.9) can be
transformed into
(2.10)
where
Ú8Ûg,gÜ
Í7»
m*
!
Ú¹, n Ä
Ûg, vec à ܰ, vec È°=
To solve (2.10), we can use a solution for simultaneous linear equations.
Then, we get approxZ [
imate values of the solution at the discrete points, Shji!hUk' & . If you want to know
Z the[
H
j
h
!
i
U
h
'
k
values at other points, you can exploit
(2.2)
as
an
interpolation
formula,
using
Z [
Z [
as its coefficients since h i h k' £ .
When the number of the used bases is rather big, the coefficient matrix of the derived
matrix equation (2.10) becomes immense. Then, the implementation for real applications
requires a more efficient matrix calculation of (2.9). In the case of Poisson’s equation, the
derived matrix equation can be transformed into the Sylvester equation. The numerical solution of the Sylvester equation has been well studied [14, 15] et al. and implemented in the
matrix computation package LAPACK [16]. Also, the textbooks [5, 6] show a solution of the
Sylvester equation using the diagonalization of the coefficient matrices. However, the general
solution of the matrix equation (2.9) has not been studied enough.
3. The Sinc-Galerkin Method for The Poisson Problem in One Type of Curvilinear Coordinate Domain. This section introduces the Sinc-Galerkin method for the Poisson
problem in the curvilinear coordinate domain which is proposed in [6, 7] but has not been
discussed in detail for the Sinc-Galerkin method.
Let us consider solving the two-variable Poisson problem
(3.1)
ÝÂ$ '
Þ,9- '
Þ/
in a domain designated by the curvilinear coordinates in which the range of is determined
by the constants and , and the range of Þ is determined by + and + , the functions
of (Figure 3.1). For the sake of simplicity, assume $ '
Þ,.0 at the boundary.
By using the variable transformations
(3.2)
,. O X
­ u
Þ ,4 + d] +1X +#a%
w
ETNA
Kent State University
etna@mcs.kent.edu
69
T OWARD T HE S INC -G ALERKIN M ETHOD FOR T HE P OISSON P ROBLEM
Þ
âwã.á!ä+åæ+ç
PSfrag replacements
âwã4ß)ä åæ+ç
ßà
áà F IG . 3.1. One type of curvilinear coordinate domain.
the domain designated by and Þ is mapped onto the square domain
Also, the derivatives with respect to and Þ transform into
Ë
%
&>,{^0
2:
^0
z2 .
+ :] +X +!a% 2
X
@A ,
X +X +
±± 2
, =
Þ
+X + ?±±
Therefore, the problem mapped onto the new domain is not of the form of Poisson’s equation but a little more complex two-variable second-order linear differential equation, which
requires the solution introduced in Section 2. For the sake of simplicity, the range of is fixed
to ^0
2: , and the range of Þ is described by +!
Q + in the remainder of this paper. This
simplification allows the transformations (3.2) to be represented by
(3.3)
,4%
­ u
Þ ,. ]ddX#a=
6
By using the transformations (3.3), Poisson’s equation (3.1) is transformed into
(3.4)
where
è
è
è
è
è
%
&
$ , - %
&'/
ré ué ué %
è
$ '
Þ>, è !
- '
Þ>, - %
&'/
:] 1X #a%
é +
>,xXy
1X
]d 1X !az 2 é >, ]dd X !a #
:
]
1
X
!
a
d
]
X
!
a
é %
&>,
]:$X#a
X W ]: X #a =
dX
Y
ETNA
Kent State University
etna@mcs.kent.edu
70
T. YAMAMOTO
The solution of general two-variable second-order linear differential equations in Section 2
is applied to this transformed equation. However, since the coefficient function of each term
must be separated with respect to the variables and , by expanding the coefficient functions, (3.4) is transformed into
(3.5)
è
$ %
] &êS
é
gé ë`a
] é êS 7é ë%1
`è
$%
è %
&
ì
gé 1/ a è
$%
& , -$è %
/
] é #ê% gé 3ë%1`a where
Xy é &ê \, dX Xy)]d X !a
é ë \,
dX
]: #a 2
é ê \, ]:1X#a ]: 1X #a
é ë$\,
]ddX!a ]: X #a
é &ì \, ]:d$X!a ]d X #a
X
é #ê \,
]ddX#a ]: X #a
é 3ë \, ]:d $X !a X dX+Y
W X =
dXÓY
W
Notice that the coefficient function of each term is represented as a product of two parts of and . The transformed equation is treated as an eight-term differential equation. Therefore,
the derived matrix equation
» becomes» like
»²í
í
Ã;ÄÅÆ Ã;ÄÅÆ ÃÅÄ;Æ ,.È°
» »
where the -th term in the equation above corresponds to the -th term in (3.5).
Ȓ
í
»
Note that the coefficient matrices which depend on the functions and are only +
=z==/
and that Ä " , ÄÅî and Ä
are identical to , Ä and Ä respectively.
This paper shows only the case of the type of curvilinear coordinate domain described
above, but the procedure in this section can be applied to other types of coordinate domains
if the coefficient functions of the transformed equation can be separated with respect to the
variables.
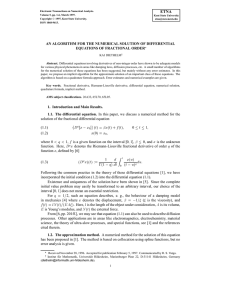
4. Numerical Experiment. This section shows an example of the numerical results for
the Poisson problem (3.1) in a curvilinear coordinate domain solved by a C language program.
The functions and were set to be
>,ï0$Xð2:ñdï/wX ´ ñ:ï)/wXð2$Xð2+
d>,{X ´>ò 2jXóXð2 õ
ô =
ETNA
Kent State University
etna@mcs.kent.edu
T OWARD T HE S INC -G ALERKIN M ETHOD FOR T HE P OISSON P ROBLEM
71
Η
1
0.5
0.2
0.4
0.6
0.8
1
Ξ
-0.5
-1
F IG . 4.1. The domain of the example.
TABLE 4.1
Maximum errors of Sinc-Galerkin solution.
sK_
2
5
10
20
Ë
Max Ë Erroro
=
ô2 = 0
'=¿ö
'= ÷
ö÷ Ë 2 0
´ Ë 20
÷ 2z0
ô 2 2z0
ô
o o
o "
The shape of the domain is shown in Figure 4.1.
A certain function whose value is 0 at the boundary was chosen as the solution '
&Þ
in advance, and the nonhomogeneous term - '
Þ was obtained by calculating Ý '
&Þ . In
this example, we selected
]zï0$wXó2:ñdï/wX ´ ñ:ï)/wXð2$Xð2jX`a ]z ñ ´ ò 2jXó²Xg2: X
ô
ñ'az$32UX
as the solution. The numbers of the basis functions were set to be s _ ,.s c , t _ , t c ,
0 and the step sizes P _ and P c were set to be different values, P _ ,4P c ,9P . Figures 4.2–4.7
show the shapes of the approximate solution obtained by the procedure introduced in this
paper
Z [ with different step sizes P . Table 4.1 shows the maximum errors at the discrete points
in the cases s _ ,9'
Qö
20
Q+0 with PL, ò Gñ/s _ , which gives the best result for the
above selected P ’s.
Since the solutions of Poisson’s equation in non-smooth boundary domains have singularities at the angular points [6, 17, 18], a bad selection of the step sizes P _ and P c sometimes
results in a fatal error. The step size smaller than the optimal value makes the discrete points
get closer to the center of the domain, while the step size larger than the optimal value makes
the discrete points get closer to the boundaries [6]. Therefore, a large step size gives rise to
the occurrence of corner singularities and drastically decreases the accuracy. Figures 4.6 and
4.7 show the shapes which have corner singularities.
5. Conclusion. This paper introduced the Sinc-Galerkin method for the Poisson problem in one type of curvilinear coordinate domain. In this procedure, the derived matrix equation can be represented by the simple matrix equation (2.10), but the coefficient matrix of
(2.10) becomes immense when the number of the bases used is rather big. Therefore, the
implementation for real applications requires a more efficient matrix calculation of (2.9).
This paper shows only the case of one type of curvilinear coordinate domain, but the
procedure in this paper can be applied to other types of coordinate domains if the coefficient
functions of the transformed equation can be separated with respect to the variables.
ETNA
Kent State University
etna@mcs.kent.edu
72
T. YAMAMOTO
u(ξ,η)
0.2
0.15
0.1
0.05
0
1.5
1
0
0.5
0.1 0.2
0.3 0.4
0.5 0.6
0.7 0.8
ξ
0.9
0
1-1.5
Ë
F IG . 4.2. Sinc-Galerkin solution of the example with
Max Error= 2+= 0
ö
η
-0.5
-1
20
ø o ùjûLü!ý
ú
and
þyû°ÿ øÂù
.
u(ξ,η)
0.2
0.15
0.1
0.05
0
1.5
1
0
0.5
0.1 0.2
0.3 0.4
0.5 0.6
0.7 0.8
ξ
0.9
Ë
0
-0.5
1-1.5
øúo ùVûÇü!ý
20 F IG . 4.3. Sinc-Galerkin solution of the example with
Max Error= 2+= 0ï
÷
η
-1
and
þ¦ûÿ
ø ù
.
ETNA
Kent State University
etna@mcs.kent.edu
73
T OWARD T HE S INC -G ALERKIN M ETHOD FOR T HE P OISSON P ROBLEM
u(ξ,η)
0.2
0.15
0.1
0.05
0
1.5
1
0
0.5
0.1 0.2
0.3 0.4
0.5 0.6
0.7 0.8
ξ
0.9
Ë
0
1-1.5
ø o ùjûLü!ý
ú
20 "
F IG . 4.4. Sinc-Galerkin solution of the example with
Max Error= = ÷
ô
2
η
-0.5
-1
and
þ¦û øù
.
u(ξ,η)
0.2
0.15
0.1
0.05
0
1.5
1
0
0.5
0.1 0.2
0.3 0.4
0.5 0.6
0.7 0.8
ξ
0.9
Ë
0
-0.5
1-1.5
øúo ùUûÇü!ý
20 "
F IG . 4.5. Sinc-Galerkin solution of the example with
Max Error= ö= ÷
ô
η
-1
and
þyûLü Â
ø ù
.
ETNA
Kent State University
etna@mcs.kent.edu
74
T. YAMAMOTO
u(ξ,η)
0.2
0.15
0.1
0.05
0
1.5
1
0
0.5
0
0.1 0.2
0.3 0.4
0.5 0.6
0.7 0.8
ξ
0.9
η
-0.5
-1
1-1.5
Ë
øúùjûLü!ý
2z0 F IG . 4.6. Sinc-Galerkin solution of the example with
Max Error= 2+=2ï÷
and
þ¦û øÂù
.
u(ξ,η)
0.2
0.15
0.1
0.05
0
1.5
1
0
0.5
0.2
0
0.4
ξ
0.6
-0.5
0.8
1-1.5
Ë
øúùjûLü!ý
2z0 î
F IG . 4.7. Sinc-Galerkin solution of the example with
Max Error= '= ÷+
η
-1
÷
and
þyû Â
ø ù
.
ETNA
Kent State University
etna@mcs.kent.edu
75
T OWARD T HE S INC -G ALERKIN M ETHOD FOR T HE P OISSON P ROBLEM
REFERENCES
[1] F. S TENGER , A Sinc-Galerkin method of solution of boundary value problems, Math. Comp., 33 (1979), pp. 85–
109.
[2] R. C. S MITH , K. L. B OWERS AND J. L UND , Efficient numerical solution of fourth-order problems in the
Modeling of Flexible Structures, in Computation and Control, Birkhäuser, Cambridge, MA, 1989, pp.
283–297.
[3] R. C. S MITH , G. A. B OGAR , K. L. B OWERS AND J. L UND , The Sinc-Galerkin method for fourth-order
differential equations, SIAM J. Numer. Anal., 28 (1991), pp. 760–788.
[4] A. C. M ORLET , Convergence of the Sinc method for a fourth-order ordinary differential equation with an
application, SIAM J. Numer. Anal., 32 (1995), pp. 1475–1503.
[5] J. L UND AND K. L. B OWERS , Sinc Methods for Quadrature and Differential Equations, SIAM, Philadelphia,
PA, 1992.
[6] F. S TENGER , Numerical Methods Based on Sinc and Analytic Functions, Springer-Verlag, New York, NY,
1993.
[7] F. S TENGER , Summary of Sinc numerical methods, J. Comput. Appl. Math., 121 (2000), pp. 379–420.
[8] N. J. LYBECK AND K. L. B OWERS , The Sinc-Galerkin patching method for Poisson’s equation, in W. F.
Ames, editor, Proceedings of the 14th IMACS World Congress on Computational and Applied Mathematics, IMACS, Vol. 1 (1994), pp. 325–328.
[9] N. J. LYBECK AND K. L. B OWERS , The Sinc-Galerkin Schwarz alternating method for Poisson’s equation, in
Computation and Control IV, Birkhäuser, Cambridge, MA, 1995, pp. 247–258.
[10] N. J. LYBECK AND K. L. B OWERS , Sinc methods for domain decomposition, Appl. Math. Comput., 75 (1996),
pp. 13–41.
[11] N. J. LYBECK AND K. L. B OWERS , Domain decomposition in conjunction with Sinc methods for Poisson’s
equation, Numer. Methods Partial Differential Equations, 12 (1996), pp. 461–487.
[12] A. C. M ORLET, N. J. LYBECK AND K. L. B OWERS , The Schwarz alternating Sinc domain decomposition
method, Appl. Numer. Math., 25 (1997), pp. 461–483.
[13] P. L ANCASTER AND M. T ISMENETSKY , The Theory of Matrices, Second ed., Academic Press, San Diego,
CA, 1985.
[14] R. H. B ARTELS AND G. W. S TEWART , Algorithm 432: solution of the matrix equation ,
Comm. ACM, 15 (1972), pp. 820–826.
[15] H. G OLUB , S. N ASH AND C. V. L OAN , A Hessenberg-Schur method for the problem , IEEE
Trans. Automat. Control, AC-24 (1979), pp. 909–913.
[16] E. A NDERSON ET AL ., LAPACK Users’ Guide, Third ed., SIAM, Philadelphia, PA, 1999.
[17] V. A. K OZLOV, V. G. M AZ ’ YA AND J. R OSSMANN , Elliptic Boundary Value Problems in Domains with Point
Singularities, American Mathematical Society, Providence, RI, 1997.
[18] V. A. K OZLOV, V. G. M AZ ’ YA AND J. R OSSMANN , Spectral Problems Associated with Corner Singularities
of Solutions to Elliptic Equations, American Mathematical Society, Providence, RI, 2001.
óû
;û
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users