Topics in deformation and moduli theory for singularities Trond Stølen Gustavsen
advertisement

Topics in deformation and moduli theory for singularities
on curves and surfaces
Trond Stølen Gustavsen
2
Introduction
The aim of this thesis is to contribute to the understanding of moduli of isolated
singularities in dimension one and two. Historically, Riemann classified the possible conformal structures on a compact Riemann surface. In algebraic geometry the
problem of moduli has gotten increasing attention. Local moduli of singularities is
one aspect, and Zariski considered in [Zar73] this problem for plane curve singularities of the form xm + y m+1 . Later Laudal and Pfister took a systematic approach
to this problem for plane curve singularities of quasihomogeneous type, see [LP88].
The word moduli is used with several slightly different meanings. In algebraic
geometry the most common use is probably in the terms, fine moduli space and
coarse moduli space. These notions are defined with reference to a functor of families
of objects in consideration. A fine moduli space is, in algebraic geometry, a scheme
representing the functor, a coarse moduli space is a scheme representing the functor
in a weaker sense. Connected to fine moduli and representability is the notion
of pro-representabilty which is the local algebroid counterpart to representability.
Even weaker is the notion of the hull of a functor on local Artin C-algebras. This
is often referred to as formal moduli. In the theory of rational surface singularities
moduli is sometimes used to refer to the equisingular part of the versal deformation.
This reflects a more general use of the word moduli as reference to objects having
a common numerical property or common topology. In these terms one may be
satisfied with describing moduli as a set of isomorphism classes. In practice this may
be realized as a the set of orbits of a group acting on a space which parameterizes
the objects.
The objects in this thesis are plane curve singularities and normal surface singularities. Plane curve singularities have been studied for a long time with respect
to different problems. For example, due to work of Oscar Zariski the concept of
equisingularity is well understood for plane curve singularities. However, one of the
problems that are not completely solved is the problem of representing all plane
curve singularities of a fixed equisingularity type by a coarse moduli space. Such
spaces, however, do not in general exist, see [LP88], before further invariants are
fixed. We address this question.
3
4
We will be interested in rational surface singularities, see [Art66]. These are
e O e ) = 0 for any resodefined as normal surface singularities X for which H 1 (X,
X
e
lution X of X. Among the normal surface singularities the rationals and restricted
classes such as quotient singularities, are much studied. The present work pays
special attention to the sandwiched singularities. These are singularities occurring
on surfaces which admit a birational morphism to a smooth surface. The defining
condition implies that sandwiched singularities are rational.
There has been considerably progress in the study of deformations of rational
surface singularities. One tries to understand properties of the versal deformation.
The base space for the versal deformation is in general neither irreducible or reduced
and may have a complicated component structure. In theory the semiuniversal deformation of an rational surface singularity X may be calculated with the knowledge
of the module TX1 of infinitesimal deformation and the obstructions sitting in the
module TX2 .
Another theme, which is perhaps not so much studied, is equisingular deformations. These are deformations which preserve the topology. Besides the general
theory of Wahl, see [Wah76], the most important work in this direction is Laufers
classification of the normal surface singularities which are taut, [Lau73]. That a
normal surface singularity is taut, means that it is determined up to isomorphism
by its dual graph of resolution.
The present thesis consists of four chapters. The chapters were originally written
as separate papers. We have done some editing but still each chapter is more or less
self-contained. Thus in the introduction of each chapter the basic definitions will be
repeated.
The thesis is divided into two parts. The first two chapters deal with dimension
formulas for TX1 and TX2 . The two last chapters are concerned with sandwiched
singularities and there moduli. The problems considered in the two last chapters
was suggested to me as a theme for my research by my supervisor Jan Arthur
Christophersen. The first two chapters grew out of the work with my master thesis.
The goal of the the second part of this thesis was to get a description of the set
of sandwiched singularities with a fixed dual graph. In proposing this problem, Jan
Arthur Christophersen was motivated by some remarks by Spivakovsky, [Spi90a].
The work presented in the first part of the thesis started with a wish to understand
the following dimension formulas
dim TX1 = (e − 4) + dim TX1b
b is the first blowup of X) and
(X
dim TX2 = (e − 2)(e − 4) + dim TX2b
5
for rational surface singularities with reduced fundamental cycle, in terms of relative
algebra cohomology. These formulas were first proved by Theo de Jong and Duco
van Straten in [dJvS94].
Chapter 1 on infinitesimal deformations and obstructions grew out of my work
with my master thesis, and is joint work with my supervisor Jan Christophersen.
Many of the crucial observations are due to him.
In our master thesis we observed the natural exact sequences
b Fi−1 ) → TXi → H 0 (X,
b Fi ) → 0
0 → H 1 (X,
b → X is the first blow up of X.
for a rational surface singularity X. Here π : X
The sheaf Fi is defined as algebra cohomology sheaf Tπi −1 OX (OXb ). It turned out
that these sequences follows by rather standard arguments from known results, see
[And74], and no other results from my master thesis is used. The sequence above
has recently been used by Jan Stevens to obtain formulas for TXi i ≥ 3, see [Ste].
The following result is proved.
Theorem. If X = Spec A is a rational surface singularity of embedding dimension
b is the blow up of X, then
e and X
dimC TX2 = (e − 2)(e − 4) + dimC TX2b + c(X)
and
dimC TX1 = (e − 4) + dimC TX1b + c(X).
where c(X) = h1 (mA F1 ).
In proving the TX1 -formula, the introduction of the sheaf A1 = A1
b
C/X
is impor-
b be the exceptional curve in the blow
tant. This is defined as follows. Let C ⊂ X
α
b of X. There is a natural map Θ b −
up X
→ OC (C). Here ΘXb denotes the sheaf of
X
1
b
derivations on X. Now A is the cokernel of α. From observations concerning the
sheaf A1 we are also able to prove the vanishing of c(X) in the case of reduced
fundamental cycle.
Chapter 2 is devoted to the invariant c(X) of a rational surface singularity X.
This is the correction term which enters in the TX1 - and TX2 -formulas, and is a coarse
invariant which vanish for large classes of rational surface singularities. However,
c(X) is not a function of the embedding dimension and is therefore more subtle than
the other terms in the formulas. In fact, it has proven to be very difficult for us
to get general results on c(X). We are however able to get some fairly nice partial
results.
We can not in general calculate c(X), but we are able to calculate a(X) =
1
b is
h (A(C)) (in examples) and we do have a(X) ≥ c(X). In the case where X
smooth a(X) = c(X).
6
The ultimate goal for c(X) would be to have some concrete description which was
easy to calculate in concrete examples. As a first step in extending the case where
c(X) = 0 we consider rational surface singularities with what we call almost reduced
fundamental cycle. It was suggested to me by Theo de Jong, to consider this class of
normal surface singularities. Under the assumption that that the fundamental cycle
Z intersects all non-2-curves negatively, we deduce that c(X) counts the number of
some special configurations in the dual graph, see theorem 2.6.3.
We apologize for the organization of the thesis. The results and considerations
in chapter 3 and 4 could be merged together. In particular some of the results in
chapter 4 improve results in 3, see for instance Theorem 3.4.6 in connection with
Proposition 4.5.30. We also introduce the infinitesimal version of ESX/A2 in chapter
4 and not in chapter 3. But as I. Lakatos clearly has shown, proofs and statements
develops together, see [Lak76]. According to Lakatos, this should not be hidden
when when mathematics is written. Thus through the organization of this thesis
one may also understand something about that path of progress in the research we
present.
Two chapters in this thesis are devoted to sandwiched singularities. A sandwiched singularity is a normal surface singularity occurring on a surface which admits a birational morphism to a smooth surface. Sandwiched singularities are related
to plane curve singularities. From a plane curve singularity C one may construct
a series of sandwiched singularities X(C,a) indexed by an a ∈ Nk , where k is the
number of irreducible branches of C. One constructs a sandwiched singularity by
taking an embedded resolution and blowing down all exceptional curves with self
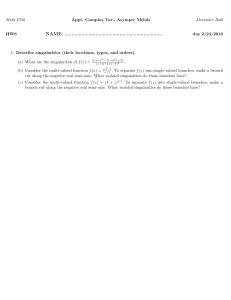
intersection different from −1. In the example
C = Spec C[[x, y]]/(x(x2 + y 3 ))
the construction would look as figure 1.
In this example k = 2 and a = (1, 2) ∈ N. The first component of the integer
vector a corresponds to the smooth branch of C and the second to the singular
branch. In both cases the numbers counts the extra blow ups from the minimal
resolution in each branch. Thus we get Z = Z(C,a) from the minimal resolution with
some extra blow ups specified by a. We get Y = Y(C,a) by blowing down the curves
with self intersection different from −1. We will also consider an affine representation
e denotes the strict transform of C in Y then
of the singularity on Y. In fact, if C
e will be affine. There is also a complete ideal q = q(C,a) with the
X(C,a) = X = Y \ C
property that Y is the blow up of A2 in q.
Thus from a plane curve singularity, we construct a smooth surface Z projective
over A2 , a singular surface Y containing one normal surface singularity, a complete
ideal q ∈ C[x, y] and an affine representative for a normal surface singularity X.
Since we consider plane curve singularities in an algebroid setting, the construction
7
Figure 1: The construction of Y(C,a) and X(C,a) .
actually depends on a choice of an affine representative. However this dependence
is not essential and when it is necessary, we will consider the germ (A2 , 0) (in the
étale-topology) and do the corresponding constructions. This will take away the
dependence on the choice of an algebraic representative of C. We will not need this
until chapter 4.
The purpose of our investigation is to describe the relationship between the
moduli of plane curve singularities and sandwiched surface singularities represented
as Y(C,a) or X(C,a) above. In order to do so we impose numerical invariants on the
objects. To a plane curve singularity we associate the topological type Φ, to Z, Y and
q we associate a graph Γ∗ . To X we associate the dual graph Γ for the corresponding
normal surface singularity. This is obtained from Γ∗ by deleting vertices of weight
−1. The data (Φ, a) is equivalent to Γ∗ . This is due to well known properties of plane
curve singularities. We describe this concretely in Section 3.4.1.
8
We attack the moduli problem on three different levels. First, fixing the numerical data, what can be said about the isomorphism classes of C and the isomorphism
b X,p where X = X(C,a) and p ∈ X is the singular
classes of the complete local rings O
point. Secondly, we consider equisingular deformations, and thirdly we consider the
problem of finding coarse moduli spaces.
Our results on equisingular deformation may be summed up in the following
diagram
Def Z/A2
−−−−→
∪
∪
smooth/surjective
ESC −−−−−−−−−−−→ ESY ' ESX/A2 −−−−−−−→
'for large a
'for large a
∩
Def Y /A2
Def X/X
e
ESX
∩
−−−−→
Def X
Here
• Def Z/A2 is the functor associated to deformations of the projective morphism
Z → A2 , see Definition 4.5.4,
e → X, see
• Def X/X
corresponds to deformations of the minimal resolution X
e
Definition 4.5.3,
• ESC is the functor of equisingular deformations of C, see [Wah74],
• ESY corresponds to equisingular deformations of Y, see Section 3.3.3 and 4.5.5
and Proposition 4.5.28,
• ESX/A2 is defined in Section 4.5.6 and corresponds equisingular deformations
of the morphism X → A2 ,
• ESX is the functor of equisingular deformations of X as defined by Wahl, see
[Wah76],
• Def Y /A2 corresponds to deformations of the projective morphism Y → A2 , see
Remark 4.5.14 and
• Def X corresponds to deformations of X.
We prove these results first in the infinitesimal case and extend to the category of germs of schemes of finite type over C in the étale topology. See Theorem
3.3.17, 3.3.18, 3.3.22 and 4.5.29 and Proposition 4.5.16, 4.5.21 and 4.5.24. Note also
Proposition 4.5.28. Note that for some of the results we assume that C is irreducible.
9
In order to talk consistently about coarse moduli spaces, we introduce global
moduli functors:
Mcurve,Φ
y
Msur,Γ∗ ' Msand,Γ∗
y
Msing,Γ
These are functors on the category of schemes of finite type over C, and
• Mcurve,Φ corresponds to locally equisingular families of curves with a fixed
topological type Φ, see Definition 4.6.9,
• Msur,Γ∗ corresponds to locally equisingular families of surfaces of the type Y,
as above, with fixed dual graph Γ∗ , see Definition 4.6.5
• Msand,Γ∗ corresponds to locally equisingular families of morphisms of the type
X → A2 , as above, with fixed dualgraph Γ∗ , see Definition 4.6.13,
• Msing,Γ corresponds to locally equisingular families of normal surface singularities with fixed dual graph X, see Definition 4.6.12.
Chapter 3 is devoted to the relationship between sandwiched singularities X
and pairs (C, a), consisting of a plane curve singularity C with k analytic branches
and an integer vector a ∈ Nk which gives the sandwiched singularity X = X(C,a) . In
this setting we consider two related questions. The first question is how isomorphism
classes of plane curve singularities relate to isomorphism classes of (the complete
local ring of) sandwiched singularities. The second question is how equisingular
deformation of the sandwiched singularity relate to equisingular deformations of the
curve.
Thus the objects in consideration are primarily sandwiched surface singularities
and plane curve singularities. However, it turns out that there is a third class of
objects which are closely related. This is the class of complete ideals in a regular
two dimensional ring, introduced by Zariski in [Zar38].
The combinatorial aspects of the construction of X(C,a) from (C, a) are well
understood and on this level there is a direct correspondence. Thus one could ask the
following question: If the complete local rings of X(C,a) and X(C 0 ,a) are isomorphic
for two plane curve singularities C and C 0 with the same topological type Φ, does it
follow that C and C 0 are isomorphic? The answer is in general negative, as we may
demonstrate as follows. Consider the case where C is an irreducible plane curve
singularity with topological type corresponding to a semigroup Φ generated by two
10
elements and assume a = 1. Then it turns out that the sandwiched singularity X(C,a)
will be a cyclic quotient singularity. From [Lau71] we know however that the cyclic
quotient singularities are uniquely given by the graph. However, in general there
will be non-isomorphic plane curve singularities with the same semigroup Φ. For
large a we are in a better situation:
Theorem. Assume C is irreducible with semigroup Φ, and let Γ be the dual graph
of X(C,a) . Then there exist an a∗ , depending only on Φ, such that if a ≥ a∗ the
isomorphism classes of plane curve singularities with semigroup Φ are in one to one
correspondence with the isomorphism classes of (the complete local ring of ) normal
surface singularities with dual graph Γ.
In order to describe the relationship between ESX and ESC in the infinitesimal
case, we introduce ESY which is a subfunctor of Def Y , and we prove that there
is a smooth map of deformation functors ESC → ESY . These are both smooth
deformations functors, and we are able to describe the kernel of this map on the
tangent level. Let K denote this kernel. We have
ESC (C[]) ⊂ TC1 = C[[x, y]]/(f,
∂f ∂f
,
),
∂x ∂y
see Theorem 3.3.7. Let q = q(C,a) be as above.
Theorem. K ⊂ TC1 is given by the image of q(C,a) in TC1 .
Here q = q(C,a) is as above.
Restriction, gives a smooth map of deformation functors ESY → ESX . We prove
that the kernel of this map on the tangent level is H 1 (Y, θ). In fact we get:
Theorem. There is a smooth map of deformation functors
ESC → ESX .
Furthermore we have some level of control over the kernel of this map on the
tangent level. In particular we show that the map is an isomorphism for large a and
irreducible C.
As a side result of our considerations we also get a description of the functor
ESC in terms of complete ideals which does not seem to appear in the literature, see
Proposition 3.3.15.
In chapter 4 we consider the problem of finding coarse moduli spaces. We
want to classify sandwiched singularities. It turns out that the most natural objects
to study are what we call sandwiched singularities with sandwiching. Recall that
sandwiched surface singularities come with a (non-unique) morphism to a smooth
surface. We call this a sandwiching. Thus we try to classify sandwiched singularities
11
with sandwiching. We consider of course also the problem of finding coarse moduli
spaces for sandwiched singularities without sandwiching.
In order to construct coarse moduli spaces we need algebraic versions of the
formal results in chapter 3. This is the question of algebraization of formal moduli,
and is in general a difficult problem. The point is to try to use Artins Approximation
Theorem, but in order to do so one has to prove the existence of effective versal
deformations.
In addition to the the problem of algebraization of formal moduli, we have the
problem of proving versality in the étale topology. This was positively solved for
isolated singularities by Elkik, see [Elk70]. We consider equisingular deformations,
and since these are defined with reference to the minimal resolutions, we want to find
deformations of the minimal resolution which is versal in the étale topology. With
some work we are able to solve this problem, see Section 4.5, in a way that makes
use of properties that are particular to our situation. In addition we generalize other
formal results, in particular we extend deformation functors to the category of germs
in the étale topology, and extend our formal results to this setting.
Our effort with algebraization and versality fits with the assumptions made in
the work of Laudal and Pfister, see [LP88], and enable us to use their approach to
the problem of moduli.
It turns out that moduli functors, Mcurve,Φ , Msand,Γ∗ and Msing,Γ , in general are
“too large” for the existence of coarse moduli spaces. In order to restrict the functors
we introduce a generalized τ -invariant which we denote by τ . The definition of these
invariants utilizes the fact that sandwiched singularities come in series indexed by the
a. Since this is true also for complete ideals, we are able also to define the generalized
τ -invariant for curve singularities as well. We denote the restricted moduli functors
τ
τ
τ
by Mcurve,Φ , Msand,Γ∗ and Msing,Γ .
In order to construct coarse moduli spaces we consider a family which parameterizes all the objects we want to classify and which is a family in the given moduli
functor. We then identify the Kodaira-Spencer kernel in the sense of [LP88]. This
is a Lie-algebra of derivations whose integral manifolds gives the locally trivial subfamilies. We try to construct a quotient of the parameter space by this action. In
order to do so, we refer to the results in [GP93].
The most difficult problem in finding coarse moduli spaces, is often to ensure
the existence of a geometric quotient. We have not considered this question in full
generality, but as a general statment on primitive sandwiched singularities, we have
the following:
Theorem. Let Φ be the semigroup of an irreducible plane curve singularity. Let for
each a ∈ N, Γ∗a be the dualgraph corresponding to sandwiched singularities coming
from curves with semigroup Φ.
12
There is a scheme SΦ and a family in Msand,Γ∗ (SΦ ) such that, for each a, all
equisingular families of sandwiched singularities (with sandwiching) and dualgraph
Γ∗a are locally (in the étale topology) pull back of this family. For each a, there
is Lie-algebra V = Va of derivations on SΦ such that the corresponding maximal
integral manifolds are in one-to-one correspondence with sandwiched singularities
having dualgraph Γ∗a .
For sandwiched singularities without sandwiching we have a similar result. However it turns out to be a small class of dual graphs Γ having a special symmetry
which breaks our arguments, see Theorem 4.9.4.
In order to get more specific results we must make an additional assumption.
We restrict ourselves to consider singularities of quasihomogeneous type. That is
singularities for which there exists a quasihomogeneous singularity with the same
topological type. We believe we could get more general results, but the amount of
difficulties is considerable also when we assume quasihomogeneous type.
Theorem. Let Γ∗ be the dualgraph of a sandwiched singularity (with sandwiching)
τ
of quasihomogeneous type and let τ be a τ -sequence such that Msand,Γ∗ ({∗}) 6= ∅,
τ
τ
then there exists a coarse moduli space Msand,Γ∗ for Msand,Γ∗ .
We are not able to find coarse moduli spaces for Msing,Γ∗ . The difficulties lie
in understanding the forgetful map Msand,Γ∗ → Msing,Γ . Recall that sandwiched
singularities with sandwiching come in series indexed by the a. In each situation, for
Msand,Γ∗ and Msing,Γ , we have a Kodaira-Spencer kernel, Vsand,a and Vsing,a . In the
case of quasihomogeneous type we are able to prove:
Theorem.
Vsand,a−1 ⊂ Vsing,a
The reader who is interested in the relationship between Msand,Γ∗ and Msing,Γ is
advised to read the whole of Section 4.9.
We are also able to get new results on plane curve singularities. Recall the
τ
restricted functor Mcurve,Φ , and recall that for irreducible plane curve singularities,
the topological type Φ may be identified with a semigroup. We have
τ
Theorem. Let Φ = hp, qi , (p, q) = 1. Let τ be a τ -sequence, such that Mcurve,Φ ({∗}) 6=
τ
τ
∅, then there exist a coarse moduli space Mcurve,Φ for Mcurve,Φ .
There are already similar results, see [GP94], [Had96]. The advantage of our
approach is the geometric meaning of the invariant τ .
When proving the results on algebraization of formal moduli, we came to consider
deformations of complete ideals where we for a complete ideal a ∈ C[x, y] introduced
the deformation functor NFDef a which consists of liftings a of a such that an is flat
for all n. We are able to prove
13
Theorem. Let a ⊂ C[x, y] be any complete ideal, and let Z be the blowup of A2 in
a. On the category C, of local Artin C-algebras the natural transformation
NFDef a → Def Z .
is an isomorphism.
We think that this observation may be used to get a better understanding of
deformations of sandwiched singularities. This is connected to the methods of de
Jong and van Straten by Proposition 4.3.8 and we propose to study deformations of
subideals of complete ideals admitting simultaneous completion. We have however
not carried out such considerations.
In general it should be said that we have assumed C to be irreducible when ever
this seems to simplify the situation. This of course does not give the best possible
results. Our feeling was that one should consider the irreducible case first since
these are the “building blocks” of general plane curve singularities and corresponds
to primitive sandwiched singularities which are the “building blocks” of sandwiched
singularities. Also, we think that in order to understand a problem one should make
reasonably assumptions so that the conceptual part is not hidden by the technical
difficulties.
Notations
In chapter 3 and 4 we will use TiX for the global algebra (hyper-)cohomology modules,
but we will just write TXi in chapter 1 and 4 as we did in this introduction.
We will usually denote the topological type of a plane curve singularity C, by Φ.
When C is irreducible this may be identified with a semigroup which we denote by
Φ or S.
By infinitesimal deformation we will mostly mean deformations over local Artin
C-algebras, or sometimes only over C[ε].
b we denote
We will denote by C the category of local Artin C-algebras. By C
the category of Noetherian C-algebras which are inverse limits of inverse systems in
C. Note however, that we also use C for families of plane curve singularities. The
meaning will be clear from the context.
We will usually denote an étale neighborhood with E or E. We will however also
use E and E for exceptional sets of resolutions. The meaning will be clear from the
context.
In chapter 1 we denote by Θ the sheaf of derivations, in the other chapters we
use θ. Also, in chapter 1, we use DerE (OXb ) for the sheaf of derivations which takes
the ideal sheaf into itself. In the other chapters we use the notion θ(log E).
14
When extending deformations functors to the cateogry of germs of schemes of
finite type over C in the étale topology, we denote the extended functors with the
same name as in the infinitesimal case, except for Def Z/A2 , Def Y /A2 and Def X/X
.
e
Note, that one choose and extension, since many properties that are automatic in
the infinitesimal case have to be assumed in the extended case.
About the references
Note that the bibliography is sorted on the labels and not on the authors. This is
due to BibTEX.
Acknowledgement
I thank first my supervisor Jan Christophersen for his support and for shearing is
knowledge and ideas.
Secondly, I which to thank Olav Arnfinn Laudal for explaining different aspects
of deformations theory and algebraization.
Parts of this research was done while the author was visiting Universität Kaiserslautern. We give our thanks to every one in the Singularity/Algebraic geometry
group for their hospitality and for all their practical and mathematical help. In
particular I thank Prof. Gerhard Pfister.
I thank, Geir Ellingsrud, Eivind Eriksen, Runar Ile, Theo de Jong, Jan Kleppe,
Ragni Piene, Kristian Ranestad, Roy Skjelnes and Arne B. Sletsjø for interesting
discussions and comments.
The chapters 1, 3 and 4 have their own acknowledgement.
In computing some examples the computer algebra system Singular, see [GPS].
has been usefull.
Contents
1 TX1 - and TX2 -formulas
1.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Results on rational singularities . . . . . . . . . . . . . . . . .
1.1.2 Cotangent cohomology . . . . . . . . . . . . . . . . . . . . . .
1.1.3 Cotangent cohomology and modifications of rational singularities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 QL-rings and blowing up . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Associated graded rings and standard bases . . . . . . . . . .
1.2.2 QL-rings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 QL singularities and blowing up . . . . . . . . . . . . . . . .
1.3 The formulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Computation of the Fi . . . . . . . . . . . . . . . . . . . . . .
1.3.2 The T 2 formula. . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.3 The T 1 formula. . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 About the correction term c(X). . . . . . . . . . . . . . . . . . . . .
1.4.1 Alternative definitions . . . . . . . . . . . . . . . . . . . . . .
1.4.2 Partial results . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
21
21
22
2 On
2.1
2.2
2.3
39
39
39
40
c(X)
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Some preliminary observations . . . . . . . . . . . . . . . . . . . . .
A subspace of H 1 (A1 b (C)) and a description of H 1 (mF1 ). . . . . .
C/X
23
25
25
26
27
27
27
29
32
34
34
36
2.4
Calculation of H 1 (A1
(C)). . . . . . . . . . . . . . . . . . . . . . .
42
2.5
2.6
2.7
b . . . . . . . . . . . .
Singularities with rational double points on X.
Rational surface singularities with almost reduced fundamental cycle
Proof of Theorem 2.6.3. . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.1 The An -case. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.2 The Dn -case . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
48
49
50
54
b
C/X
15
16
3 Equisingular deformations
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . .
3.2 Preliminaries . . . . . . . . . . . . . . . . . . . . .
3.2.1 Deformations . . . . . . . . . . . . . . . . .
3.2.2 Rational surface singularities . . . . . . . .
3.2.3 Dual graphs for normal surface singularities
3.2.4 Plane curves . . . . . . . . . . . . . . . . .
3.3 Equisingular deformations . . . . . . . . . . . . . .
3.3.1 Construction of sandwiched singularities . .
3.3.2 Equisingular deformations . . . . . . . . . .
3.3.3 The deformation functors . . . . . . . . . .
3.3.4 The tangent spaces . . . . . . . . . . . . . .
3.3.5 The map ESC → ESX . . . . . . . . . . . .
3.4 Results in the case of large a. . . . . . . . . . . . .
3.4.1 Graphs of sandwiched singularities . . . . .
3.4.2 Complete ideals . . . . . . . . . . . . . . . .
3.4.3 The tangent space of ESY when a is large .
3.4.4 The proof of Theorem 3.4.6 . . . . . . . . .
CONTENTS
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Moduli of sandwiched singularities
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . .
4.2 Preliminaries . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Deformations . . . . . . . . . . . . . . . . . .
4.2.2 Rational surface singularities . . . . . . . . .
4.2.3 Dual-graphs for normal surface singularities .
4.2.4 Plane curves . . . . . . . . . . . . . . . . . .
4.2.5 Equisingular deformations . . . . . . . . . . .
4.3 Introduction to sandwiched singularities . . . . . . .
4.3.1 Construction of sandwiched singularities . . .
4.3.2 Complete ideals . . . . . . . . . . . . . . . . .
4.3.3 Combinatorics of sandwiched singularities . .
4.4 Deformation of ideals . . . . . . . . . . . . . . . . . .
4.5 Local deformations in the étale topology . . . . . . .
4.5.1 The Approximation Theorem . . . . . . . . .
4.5.2 Étale-topology, deformations and versality . .
4.5.3 Hulls and formal versality. . . . . . . . . . . .
. . . . . . .
4.5.4 Versality for Def Z/A2 and Def X/X
e
4.5.5 The equisingular deformation functors . . . .
4.5.6 Equisingular deformations with sandwiching .
4.5.7 Versality of equisingular deformations . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
57
57
59
59
59
60
61
61
61
64
66
72
75
78
78
81
82
83
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
87
87
89
89
89
90
90
91
91
92
95
97
99
101
102
103
106
107
111
116
121
CONTENTS
4.5.8 Connections between the functors . . . . . . . . . . .
The moduli functors . . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Global equisingular families . . . . . . . . . . . . . . .
4.6.2 Relating the global families . . . . . . . . . . . . . . .
4.6.3 Restriction of the functors to τ -constant families . . .
4.7 The Kodaira-Spencer map and its kernel . . . . . . . . . . . .
4.7.1 The conditions in [LP88] for sandwiched surfaces . . .
4.7.2 The conditions in [LP88] for sandwiched singularities .
4.7.3 The Kodaira-Spencer map for sandwiched surfaces . .
4.7.4 The Kodaira-Spencer map for sandwiched singularities
4.7.5 The Kodaira-Spencer kernel and coarse moduli spaces
4.8 Moduli spaces . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8.1 Classifying spaces and isomorphism classes . . . . . .
4.8.2 Results in the case of quasihomogenous type . . . . .
4.9 Results concerning Msing,Γ . . . . . . . . . . . . . . . . . . . .
4.9.1 Introduction . . . . . . . . . . . . . . . . . . . . . . .
4.9.2 Classifying spaces and isomorphism classes . . . . . .
4.10 The map Msand,Γ∗ → Msing,Γ . . . . . . . . . . . . . . . . . .
4.10.1 Introduction . . . . . . . . . . . . . . . . . . . . . . .
4.10.2 Calculations on the tangent level . . . . . . . . . . . .
4.6
17
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
121
125
126
133
134
135
136
138
138
140
142
143
143
148
157
157
158
160
160
161
18
CONTENTS
Chapter 1
On infinitesimal deformations
and obstructions for rational
surface singularities
with Jan Arthur Christophersen
Introduction
The purpose of this paper is to prove dimension formulas for T 1 and T 2 for rational
surface singularities. These modules play an important role in the deformation
theory of isolated singularities in analytic and algebraic geometry. The first may be
identified as the Zariski tangent space of the versal deformation of the singularity; i.e.
it is the space of infinitesimal deformations. The second contains the obstruction
space – in all known cases it is the whole obstruction space for rational surface
singularities.
The dimension formulas for TX1 and TX2 relate these dimensions to similar invarib of X. An important result of Tjurina, which we state below
ants on the blow up, X,
e may be gotten by a series of
(Theorem 1.1.1), shows that the minimal resolution X
blow-ups. Thus, in principle, the formulas allow one to compute these dimensions
via blowing up. In fact, the nature of the formulas allows one in many cases to
compute these dimensions from the graph.
Computing T 1 and T 2 for rational surface singularities has a history which we
briefly recall. (The terms involved here are explained in Section 1.1.) Of course for
the rational double points T 2 = 0 and T 1 is easily computed. We will from now
on assume that singularities are not hypersurfaces; i.e. the embedding dimension
e is not 3. In the 80’s much work was done in Hamburg on computing T 1 for
quotient surface singularities, a sub-set of the rationals, and the general form turned
19
CHAPTER 1. TX1 - AND TX2 -FORMULAS
20
e Θ e ) ([BKR88]). Behnke and Knörrer
out to be dim TX1 = (e − 4) + dim H 1 (X,
X
([BK87]) where able to prove the same formula for a larger, but still very restricted
class of rational surface singularities. In 1987, J. Arndt and the first author proved
independently that for a cyclic quotient singularity dim TX2 = (e − 2)(e − 4). Later,
using hypersurface sections, Behnke and the first author proved this formula for
rational surface singularities with reduced fundamental cycle and T 2b = 0 and for all
X
quotient singularities ([BC91]). Finally, de Jong and van Straten ([dJvS94]), gave
the correct formulas for all rational surface singularities with reduced fundamental
cycle.
Let I be an index set for all singularities Xν (including X itself) that appear
in the process of resolving a rational surface singularity with reduced fundamental
cycle by blowing up points. Let e(ν) be the embedding dimension of Xν and set
I4 = {ν ∈ I : e(ν) ≥ 4}; i.e. the indices of non-hypersurface singularities. What de
Jong and van Straten proved ([dJvS94, Theorem 3.16]) was that
X
e Θ e)
dim TX1 =
(e(ν) − 4) + dim H 1 (X,
X
ν∈I4
dim TX2
=
X
(e(ν) − 2)(e(ν) − 4) .
ν∈I4
b we have the groups T 1 and T 2 (see Section 1.1.2). Since rational surface
On X
b
b
X
X
P
1 b
1
singularities are absolutely isolated, dim T 1b =
b)
b dim TX,p
b + dim H (X, ΘX
p∈X
X
P
and dim T 2b = p∈Xb dim T 2b . It is well known that for a rational double point
X
X,p
e Θ e ). Thus, using the Leray spectral sequence for p : X
e →X
b
dim T 1 = dim H 1 (X,
X
X
and that p? ΘXe ' ΘXb we see that the de Jong–van Straten result is equivalent to
saying that for all rational surface singularities with reduced fundamental cycle
dim TX1 = (e − 4) + dim TX1b
dim TX2 = (e − 2)(e − 4) + dim TX2b .
The results in this paper originated from a wish to find a direct relationship
between the T i and blowing up for rational singularities. This is described in Section 1.1.2. This allows us to compute the T i in terms of the cohomology of certain
b What we get (Theorem 1.3.13 and Theorem 1.3.8) is that for all
sheaves on X.
rational surface singularities (with e ≥ 4)
dim TX1 = (e − 4) + dim TX1b + c(X)
dim TX2 = (e − 2)(e − 4) + dim TX2b + c(X)
b
where c(X) is the dimension of the H 1 of a certain sheaf (in fact several) on X
(Definition 1.3.7). We give some partial results on c(X) in Section 1.4, in particular
1.1. PRELIMINARIES
21
we show that c(X) = 0 when the fundamental cycle is reduced, reproving the de
Jong–van Straten result.
Acknowledgment
The results in this paper have developed through continuous discussions with Kurt
Behnke, Theo de Jong, Jan Stevens and Duco van Straten. Jan Stevens pointed
out a serious mistake in the first version of this paper. We are grateful to Olav
Arnfinn Laudal for patiently answering questions and explaining the cohomology
theory involved and to Kristian Ranestad for helping us out with the geometry.
1.1
1.1.1
Preliminaries
Results on rational singularities
The singularities we study are algebraic over C, i.e. of the form X = Spec A where
A = P/I and P is a regular local C algebra essentially of finite type. A normal
e → X is rational if H 1 (X,
e O e) =
surface singularity X with minimal resolution f : X
X
e is a union of irreducible components
0 ([Art66]). The exceptional divisor E ⊂ X
Ei ' P1 . There is a fundamental cycle Z, supported on E, defined by mOXe . Here m
is the maximal ideal in OX . This divisor may be constructed as the unique smallest
P
positive divisor Z =
ri Ei satisfying Z · Ei ≤ 0 for all irreducible components Ei .
The embedding dimension of X, e = dimC m/m2 , equals −Z 2 +1 and the multiplicity
m(X) = e − 1 = −Z 2 .
There are three theorems on rational surface singularities which are essential for
our results. We collect them and partially rephrase them here. The first is a result
b may be obtained from X.
e
from [Tju68] which shows how the blow up X
Theorem 1.1.1 (Tjurina). If X is a rational surface singularity, then the blow up
e by contracting all components Ei
of X is isomorphic to the surface obtained from X
with Z · Ei = 0.
In [Wah77] we find the basic algebraic property of rational surface singularities
that we will need.
Theorem 1.1.2 (Wahl). Let A = P/I be the local ring of a rational surface singularity, where P is a regular local algebra of dimension e over an algebraically closed
field k. Let P̄ and Ā be the associated graded rings with respect to the maximal ideal.
CHAPTER 1. TX1 - AND TX2 -FORMULAS
22
Then there exist minimal projective resolutions:
φe−2
φ2
φ1
φ̄e−2
φ̄2
φ̄1
→ P b2 −→ P b1 −→ P −
→A−
→ 0,
0−
→ P be−2 −−−→ . . . −
→ Ā −
→ 0,
→ P̄ b2 −→ P̄ b1 −→ P̄ −
0−
→ P̄ be−2 −−−→ . . . −
so that
(i) the second resolution is the associated graded complex attached to the first;
(ii) φ̄i is homogeneous, of degree 1 (i > 1) or 2 (i = 1);
(iii) bi = i e−1
i+1 .
Actually we will only need part (i) and (ii) for i = 1, 2, 3. These imply that the
ring of a rational surface singularity is something we call a QL ring (see Section 1.2.2),
making it easy to compare the equations and relations defining the blow up locally
with those of X.
The only result from previous work on T 2 we need is about the module structure.
This is [BC91, Theorem 5.1.1 (1)], but the statement in that paper about annihilators
of T 2 is incorrect. What actually is proven is
Theorem 1.1.3 (Behnke–Christophersen). If X is a rational surface singularity
with e ≥ 4 and x ∈ m \ m2 is generic (i.e. projects onto a general element of m/m2 ),
then dim TX2 /mTX2 = (e − 2)(e − 4) and xTX2 = mTX2 .
In other words dim TX2 /xTX2 = (e − 2)(e − 4). This will be important in Section 1.3.2.
1.1.2
Cotangent cohomology
We review some properties of the cotangent complex. For our later use it is enough
to assume that we have a noetherian ring S and an S algebra A of essentially finite
A/S
type. There exists a complex of free A modules; the cotangent complex L· . See
[And74, p. 34] for a definition. For an A module M we get the cotangent cohomology
A/S
modules T i (A/S; M ) := H i (HomA (L· , M )). If S is the ground field we abbreviate
T i (A/S; M ) =: TAi (M ) and TAi (A) =: TAi =: TXi if X = Spec A.
The first three modules are important in deformation theory and we could have
given an ad hoc definition as follows. Let P be a polynomial S algebra (or the
localization of such an algebra) mapping onto A so that A ' P/I for an ideal I. Let
j
0→R→F →P →A→0
1.1. PRELIMINARIES
23
be an exact sequence presenting A as a P module with F ' P m free. We have
T 0 (A/S; M ) = DerS (A, M ), the module of S derivations into M . The cokernel of
the natural map DerS (P, M ) → HomA (I/I 2 , M ) is T 1 (A/S; M ). Let R0 be the submodule of R generated by the trivial relations; i.e. those of the form j(x) y − j(y) x.
Then R/R0 is an A module and we have an induced map HomA (F/R0 ⊗P A, M ) →
HomA (R/R0 , M ). The cokernel is T 2 (A/S; M ). Notice that HomA (F/R0 ⊗P A, M )
is just the sum of m copies of M and the map is
X
(α1 , . . . , αm ) 7→ [r̄ 7→
ri αi ]
where r ∈ F represents r̄ ∈ R/R0 .
If A is a smooth S algebra then T i (A/S; M ) = 0 for i ≥ 1 and all A modules M .
As usual a short exact sequence of A modules induces a long exact sequence in the
T i (A/S; ?). More importantly, two ring homomorphisms S → A → B induce a long
exact sequence called the Zariski–Jacobi long exact sequence;
· · · → T i (B/A; M ) → T i (B/S; M ) → T i (A/S; M ) → T i+1 (B/A; M ) → · · ·
where M is a B module. (See [And74, Théorème 5.1].)
If Y is a scheme we may globalise the above local construction. (See for example
[And74, Appendice], [Buc81, 2.2.3] and [Lau79, 3.2] for details and proofs.) If S is a
A/S
sheaf of rings and A an S algebra we set L·
to be the complex of sheaves associated
A(U )/S(U )
with the presheaves U 7→ L·
. Let F be an A module. We get the cotangent
A/S
i
cohomology sheaves TA/S (F) as the cohomology sheaves of HomA (L· , F) and the
A/S
i (F) as the cohomology of Hom (L
cotangent cohomology groups TA/S
, F).
·
A
i
Because of the functoriality of these constructions: TA/S (F) is the sheaf as? (F) is the hypersociated to the presheaf U 7→ T i (A(U )/S(U ); F(U )) and TA/S
A/S
cohomology of HomA (L·
quence
, F). In particular there is a “local-global” spectral se-
q
n
H p (Y, TA/S
(F)) ⇒ TA/S
(F) .
(1.1.1)
If A is the structure sheaf OY and S is the ground field, then (abbreviating as above)
the TYi play a role in the deformation theory of Y similar to the local case. The
spectral sequence (1.1.1) becomes H p (Y, TYq ) ⇒ TYn and shows how local and global
deformations contribute to the total.
1.1.3
Cotangent cohomology and modifications of rational singularities
Consider first any morphism of schemes f : Y → X. Let f −1 be the sheaf theoretical
adjoint functor of f? as defined in for example [Har77, II,1]. We have the for us very
important result in [And74, Appendice. Proposition 56] which we translate to our
24
CHAPTER 1. TX1 - AND TX2 -FORMULAS
notation. (Notice that the f ? in [And74] is f −1 and not the f ? in standard algebraic
geometry notation).
Proposition 1.1.4. If f : Y → X is a morphism of schemes, A is an S algebra on
X and F is an f −1 A module on Y such that Rk f? (F) = 0 for k ≥ 1, then there are
natural isomorphisms
i
(f? F)
Tfi −1 A/f −1 S (F) ' TA/S
for all i ≥ 0.
Assume now that X = Spec A is a normal singularity and f : Y → X is a
modification; i.e. f is proper and birational. We will slightly abuse notation and
write f −1 A for f −1 OX . From the spectral sequence (1.1.1) and Proposition 1.1.4 we
get immediately
Theorem 1.1.5. If f : Y → X = Spec A is a modification and F is a coherent
sheaf on Y with Rk f? (F) = 0 for k ≥ 1, then there is a spectral sequence {Erp,q } with
E2p,q = H p (Y, Tfq −1 A (F)) such that
E2p,q ⇒ TAn (f? F) .
Remark 1.1.6. The results we have compiled from the literature to get Theorem 1.1.5
involve injective resolutions to compute hyper-cohomology etc.. In the computational part of this paper it will be important to know some of the maps from the
spectral sequence explicitly, and therefore in terms of Čech cohomology. We will
state these descriptions without proof. For a proof of Theorem 1.1.5 using Čech
cohomology (done before we found the relevant known results) and explaining the
maps see [SG94].
Corollary 1.1.7. If f : Y → X = Spec A is a modification of a rational surface
singularity then there are exact sequences
i
0
i
0 → H 1 (Y, Tfi−1
−1 A (OY )) → TX → H (Y, Tf −1 A (OY )) → 0
for all i ≥ 0.
Proof. The spectral sequence in Theorem 1.1.5 is derived from a double complex
for computing the hyper-cohomology Tfn−1 A (OY ). On the other hand, since X is
affine, H i (Y, G) = 0 for i ≥ 2 for any coherent G. Thus the E2p,q consists of two
adjacent non-zero rows. The result follows from standard arguments. Notice that
f? OY ' OX by normality.
b → X to
We will use Corollary 1.1.7 when the modification is the blow-up π : X
b
prove our formulas. To shorten notation we define the sheaves on X
Fi := Tπi −1 A (OXb ) .
1.2. QL-RINGS AND BLOWING UP
25
Notice that there are natural maps TYi → Tfi −1 A (OY ) that induce, with the help of
the exact sequences, natural maps TYi → TXi . If i = 1 these are the tangent maps
to the contraction of deformations of Y to deformations of X. They behave very
sporadically, and we have not found them useful for proving the formulas. Instead
we will have to make some unnatural maps relating the Fi to the T ib .
X
1.2
1.2.1
QL-rings and blowing up
Associated graded rings and standard bases
We recall some facts regarding associated graded rings and standard bases.
Definition 1.2.1. Let R be a noetherian local ring with maximal ideal m and let
M be a finitely generated R-module. Let N ⊂ M be a submodule. We set
G(m, M ) := ⊕ mi M/mi+1 M
i≥0
G(m, N ⊂ M ) := ⊕ mi M ∩ N + mi+1 M/mi+1 M
i≥0
B(m, M ) := ⊕ mi M .
i≥0
Also, for any nonzero m ∈ M we put
ord(m, M )(m) = sup {n|m ∈ mn M } ,
and if m 6= 0 and ord(m, M )(m) = d we define the initial form
in(m, M )(m) = m + md M/md+1 M
Let m1 , . . . , mt be generators for N . Then m1 , . . . , mt is called a standard basis for
N if the submodule G(m, N ⊂ M ) is generated by in(m, M )(m1 ), . . . , in(m, M )(mt ).
We will write ord(m) for ord(m, M )(m) and in(m) for in(m, M )(m) when no
misunderstanding is likely to occur.
We will need the following result – see e.g. [HIO88, Theorem 13.7].
Theorem 1.2.2. Let R be a noetherian local ring with maximal ideal m, let M be a
finitely generated R-module and let N ⊂ M be a submodule. Then m1 , . . . , mt is a
standard basis for N if and only if for any z ∈ N there are a1 , . . . , at ∈ R such that
z = a1 m1 + · · · at mt and ord(z) ≤ ord(ai ) + ord(m) for all i.
CHAPTER 1. TX1 - AND TX2 -FORMULAS
26
1.2.2
QL-rings
Let P = C [x1 , . . . , xe ]m be the polynomial ring with e generators localized in m =
(x1 , . . . , xe ). We let m denote both the maximal ideal in P and quotients of P unless
this causes confusion.
Definition 1.2.3. We will say that A is a QL-ring (quadratic generators and linear
relations) if A = P/I where I ⊂ P is a prime ideal such that
(i) The ideal I has a standard basis f1 , . . . , fm with ord(fi ) = 2 for i = 1, . . . , m.
P
(ii) The relation module R = {(p1 , . . . , pl ) ∈ P m | pi fi = 0} has a standard
basis r1 , . . . , rs with ord(ri ) = 1 for i = 1, . . . , s.
(iii) The in(fi ) and in(ri ) are linearly independent.
We say that X = Spec A is a QL singularity if A is a QL-ring.
Rational surface singularities with e ≥ 4 are QL singularities by Theorem 1.1.2.
Another example is the class of minimal elliptic surface singularities with e ≥ 5
([Wah77, Theorem 2.8]).
QL-singularities have an algebraic property that will be very important for us in
the proof of the formulas. We state it here for future reference.
Lemma 1.2.4. Suppose A is a QL-ring and assume f1 , . . . , fm and r1 , . . . , rs are
standard bases as in Definition 1.2.3. Let x ∈ m \ m2 .
(i) Every fj is involved in some relation r = (r1 , . . . , rm ) with rj ∈ m \ m2 .
(ii) Every fj is involved in some relation r = (r1 , . . . , rm ) with rj ∈
/ (x).
Proof. The first statement is proven in [Wah87, 2.5] and the second one follows from
the same argument, so we repeat it here. We may assume j = 1 and consider the
P i
P i
trivial relation (f2 , −f1 , 0, . . . , 0) =
qi r . Thus all qi ∈ m and f2 =
q i r1 ∈
/ m3 .
2
i
2
Also – f2 ∈
/ (x) since x ∈
/ m and A is a domain. So some r1 ∈
/ m and some
j
r1 ∈
/ (x).
As a consequence we get a slight generalization of [Wah87, Lemma 2.6].
Lemma 1.2.5. If A = P/I is a QL-ring and x ∈ (m \ m2 ) ∪ {0}, then every
φ ∈ HomA (I/I 2 , A/(x)) has Im(φ) ⊆ mA/(x) .
Proof. Assume φ(f1 ) = 1 and let hi ∈ P represent φ(fi ) ∈ A/(x). After changing
fi to fi − hi f1 we may assume φ(fi ) = 0 for i ≥ 2. (Remember that the in(fi )
P
are independent.) This contradicts Lemma 1.2.4, since for all relations
ri φ(fi ) =
r1 ≡ 0 mod (x).
1.3. THE FORMULAS
1.2.3
27
QL singularities and blowing up
b = Proj B(m, A) → Spec A be the blow up of
Let A = P/I be a QL-ring. Let π : X
b
Spec A. Recall that the blow-up X is covered by Spec B(m, A)(xt) for x ∈ mA ⊂ A,
where we consider B(m, A) as A[mt].
For x ∈ P, x ∈
/ I we denote by P m
x the subring of C(x1 , . . . , xe ) generated by
the image P and the elements of the form xa where a ∈ m. Similarly we denote
by A m
x the subring of A’s quotient field generated by the image of A and the
elements of the form xa where a ∈ m. For the covering of the blow-up we have
B(m, A)(xt) ' A m
and the restriction of π to Spec B(m, A)(xt) is induced by the
mx inclusion A ⊂ A x .
Lemma 1.2.6. Suppose A = P/I is a QL-ring and assume f1 , . . . , fm and r1 , . . . , rs
are standard bases as in Definition 1.2.3. Then
m
2
2
(i) A m
x ' P x /IB where IB is generated by f1 /x , . . . , fm /x .
(ii) The relation module
h m im X f
h m i
i
S = (p1 , . . . , pm ) ∈ P
|
pi 2 = 0 in P
x
x
x
is generated by r1 /x, . . . , rs /x.
Proof. The first statement is a special case of a well known property of blow-ups,
see e.g. [HIO88, Proposition 13.13].
We prove the second statement for lack of reference. Let R be the relation
m
1
s
module for the fi , and set R
x to be the P x module generated by r /x, . . . , r /x.
Clearly R
m ) ∈ S. We may find an n such
x ⊂ S. Choose some p = (p1 , . . . , pP
n−2
that x
pi ∈ P for all i = 1, . . . , m. Thus
xn pi fi = 0, so xn p ∈ R. Since
P j
n
x p ∈ R, we are by Theorem 1.2.2 able to find q1 , . . . , qs such that xn p =
qj r
m
j
m
n
j
and ord(m, P )(qj ) + ord(m, P )(r ) ≥ ord(m, P )(x p). Now ord(r ) = 1 and
P
ord(xn p) ≥ n, hence ord(qj ) ≥ n − 1. We end up with p = (qj /xn−1 )(rj /x) with
R
qj /xn−1 ∈ P m
x , which shows that p ∈ x .
1.3
1.3.1
The formulas
Computation of the Fi .
π
b→
Let A = P/I be a QL-ring, where P is as above with e = dim mA /m2A . Let X
X
be the blow up of X = Spec A and M the blowup of Spec P , so that we may view
b as the strict transform of X in M . Let C ⊂ X
b be the exceptional divisor defined
X
by mOXb . Thus C = Proj G(m, A).
CHAPTER 1. TX1 - AND TX2 -FORMULAS
28
b with
Notation. Throughout the following proofs we will be working locally on X
m
m
affine charts Spec B with B = A x as in Lemma 1.2.6. Set PB = P x . We
use variables x, x1 , . . . , xn (n = e − 1) for P , so ti := xi /x and x generate PB .
Generators for I will be denoted f1 , . . . , fm and g1 , . . . , gm will be generators of IB
as in Lemma 1.2.6; i.e. x2 gi = fi (x, t1 , . . . , tn ) . We view the xi = xti as elements of
PB as well.
b in M and set NA (O b ) = T 1 −1 −1 (O b ).
Let N b
be the normal sheaf of X
X/M
π
X
A/π
P
X
b Let DerC (X)
b be the subsheaf of Θ b consisting
Let ΘXb be the tangent sheaf on X.
X
of derivations D with D(IC ) ⊆ IC . Finally define A1 b to be the cokernel of the
C/X
map ΘXb → OC (C) defined locally – where C is defined by x – as D 7→ D(x) ⊗
mod (x). Notice that there is an exact sequence
b → Θ b → OC (C) → A1
0 → DerC (X)
b →0
X
C/X
1
x
(1.3.1)
with the maps as above.
First we compare the Fi with the T ib .
X
Proposition 1.3.1. If X is a QL-singularity, then
b
(i) F0 ' DerC (X)(C).
(ii) NA (OXb ) ' NX/M
(2C).
b
(iii) There is an exact sequence 0 → A1
b
C/X
(C) → mF1 → T 1b (C) → 0.
X
(iv) mF2 ' T 2b .
X
The isomorphisms and maps are non-canonical.
b with B = A m as above. The isomorProof. Consider an affine chart Spec B of X
x
b
phism in (i) is given by the map DerC (X)(C)
→ F0 which is locally D ⊗ x1 7→ x1 D|A .
This is easily checked to be injective, and if δ ∈ Der(A, B) then it comes from a
derivation D determined by D(x) = xδ(x) and D(ti ) = δ(xi ) − ti δ(x).
b in M and V the exceptional divisor of π : M →
Let J be the ideal sheaf of X
Spec P . Lemma 1.2.6 implies that π ? I ' J(−2V ); this induces the isomorphism in
(ii).
The chain rule and the fact that x is not a zero divisor, yields the following
equalities in B:
∂fj
∂gj X ∂gj
= x(x
−
ti
)
∂x
∂x
∂ti
(1.3.2a)
∂fj
∂gj
=x
.
∂xi
∂ti
(1.3.2b)
i
1.3. THE FORMULAS
29
The isomorphism (ii) takes φ ∈ HomP (I, B) to the morphism determined by
gj 7→ φ(fj ). In particular (1.3.2) shows that it induces (after a twist) a map
F1 (−C) → T 1b (C) which must be surjective. We claim that this factors through
X
P
mF1 . Indeed, if x[φ] = 0 in TA1 (B), then xφ(fj ) = b ∂fj /∂x + bi ∂fj /∂xi , so by
P
P
(1.3.2), φ(fj ) = b (x ∂gj /∂x − ti ∂gj /∂ti ) + bi ∂gj /∂ti . Thus [φ] ⊗ x 7→ 0. This
gives the right surjection in (iii).
Let K be the kernel of this map locally, i.e. of xTA1 (B) → TB1 . We have x[φ] ∈ K
P
P
iff φ(fj ) = b ∂gj /∂x + bi ∂gj /∂ti . But then xφ(fj ) = bx ∂gj /∂x + bi x ∂gj /∂ti =
P
xb ∂gj /∂x +
bi ∂fj /∂xi , so x[φ] equals the class of the map fj 7→ bx ∂gj /∂x in
1
TA (B). In particular K is a cyclic B module generated by the class of the map
fj 7→ x ∂gj /∂x.
This yields a surjection B K. The kernel of this map is
∂fj X ∂fj
∂gj
= b0
+
bi
for some bi ∈ B, j = 1, . . . , m}
∂x
∂x
∂xi
∂gj X
∂gj
∂gj
= b0 x
+
(bi − b0 ti )
} = a + (x) .
= {b ∈ B : b
∂x
∂x
∂ti
P
where a = {b : b ∂gj /∂x = bi ∂gj /∂ti }. But clearly this last condition is the same
as b = D(x) for some D ∈ Der(B). This gives an exact sequence
{b ∈ B : bx
0 → B/a + (x) → xTA1 (B) → TB1 → 0
which globalizes to the one in (iii).
Let R and S be as in Lemma 1.2.6 and let R0 and S0 be the submodules of Koszul
relations. Thus R ⊗P PB ' x · S and R0 ⊗ PB ' x2 · S0 . Now HomA (R/R0 , B) is the
kernel of the natural map HomA (R/IR, B) → HomA (R0 /IR, B), so it is isomorphic
to the kernel of HomPB (x·S, B) → HomPB (x2 ·S0 , B). This kernel is again isomorphic
to HomB (S/S0 , B) since S0 /xS0 is annihilated by the non-zero divisor x.
This isomorphism induces a surjection TA2 (B) TB2 . One checks that the kernel
is {[φ] ∈ TA2 (B) : x · [φ] ≡ 0} which is also the kernel of the multiplication map
·x
TA2 (B) → TA2 (B). This induces the isomorphism (iv) locally.
1.3.2
The T 2 formula.
b F1 |C ) =
Proposition 1.3.2. If X is a rational surface singularity, then H 0 (X,
0
2
b F |C ) = 0.
H (X,
Proof. From the quotient map OXb → OC and Theorem 1.1.5 we get the following
commutative diagram with surjective horizontal maps;
TX2
αy
−−−−→
b F2 )
H 0 (X,
β
y
b T 2 −1 (OC ))
TX2 (π? OC ) −−−−→ H 0 (X,
π A
CHAPTER 1. TX1 - AND TX2 -FORMULAS
30
Now π? OC ' A/m. For a rational singularity with e ≥ 5 the “relations among
relations” are generated by independent linear ones (Theorem 1.1.2). We may argue
as in Lemma 1.2.5 to show that the images of all φ ∈ HomA (R/R0 , A) are in m. So
α is the zero-map and therefore β is the zero-map. On the other hand β factors
H 0 (F2 ) → H 0 (F2 |C ) → H 0 (Tπ2 −1 A (OC )). The second map is injective and the
cokernel of the first map is contained in H 1 (mF2 ) which is zero by Proposition 1.3.1.
b F2 |C ) = 0.
This proves that H 0 (X,
In the case of F1 |C we can make a direct calculation relying only on the QL
property. As above we consider the injective map H 0 (F1 |C ) ,→ H 0 (Tπ1 −1 A (OC )).
Since the π −1 A module structure on OC is defined by A A/m ' C ,→ OC , we
have Tπ1 −1 A (OC ) ' mOC where m is the minimal number of generators for I. In
particular H 0 (Tπ1 −1 A (OC )) ' Cm . A global section of H 0 (F1 |C ) must therefore be
locally represented by a homomorphism that looks like fj 7→ λj + IC with λj ∈ C.
We claim that for every fj there exists a chart with coordinate ring B = A m
x ,
2
such that there are no φ ∈ HomA (I/I , B) with φ(fj ) ≡ λ mod (x) and λ 6= 0
a constant. To prove this consider for fj a relation as in Lemma 1.2.4 and set
P
x = rj . If any of the other rk ∈ (x), say rk = hk x, change fj to fj + k hk fk .
P
Thus we may assume all other rk ∈ m \ (x). We must have
ri φ(fi ) = 0 in B,
P
so φ(fj ) = − i6=j (ri /x)φ(fi ) in B, but by the assumption on these ri , none of the
(ri /x) are constants.
The following result follows immediately from Proposition 1.3.1 and Proposition 1.3.2.
Corollary 1.3.3. If X is a rational surface singularity then
b F2 ) ' H 0 (X,
b T2 )
H 0 (X,
b
X
and the sequence
b mF1 ) → H 1 (X,
b F1 ) → H 1 (X,
b F1 |C ) → 0
0 → H 1 (X,
is exact.
b F1 ). Using Theorem 1.1.3 we will prove via
Let us now concentrate on H 1 (X,
b F1 |C ) = (e − 2)(e − 4). (We view cohomology groups
two lemmas that dimC H 1 (X,
b as A modules by their isomorphisms with Ri π? ’s).
on X
Lemma 1.3.4. Suppose X is a rational surface singularity and x ∈ m is generic. If
K is a submodule of TX2 containing the kernel of multiplication by x, then dimC K/xK =
(e − 2)(e − 4).
1.3. THE FORMULAS
31
·x
Proof. Let L be the kernel of the multiplication map K → K and M the kernel
of multiplication by x on TX2 . Clearly L = M ∩ K, but we have assumed that
M ⊆ K, so L = M . Thus dimC K/xK = dimC T 2 /xT 2 which equals (e − 2)(e − 4)
by Theorem 1.1.3.
Lemma 1.3.5. Suppose X is a rational surface singularity and x ∈ m is generic. If
b F1 ) with the kernel of T 2 → H 0 (X,
b F2 ), then H 1 (X,
b F1 ) contains
we identify H 1 (X,
X
the kernel of multiplication by x.
Proof. We may assume by genericity of x that a global section vanishes if and only
0
2
0 2
if it vanishes in the chart Spec A m
x . (We know for example that H (F ) ' H (T )
and T 2 has support at points.) Thus we need to show that the local maps TA2 →
TA2 (B) map an element of the kernel of multiplication by x to zero if B = A m
x .
P
If [φ] is in this kernel we may find a1 , . . . , am ∈ A such that xφ(r) =
ai ri in A
for all relations r = (r1 , . . . , rm ). We claim that a1 , . . . , am ∈ m. This is because
the application fj 7→ aj defines an element of HomA I/I 2 , A/(x) , so Lemma 1.2.5
P
applies. But then ai /x ∈ B and φ(r) = (ai /x)ri in B, thus [φ] 7→ 0.
b F1 |C ) =
Proposition 1.3.6. If X is a rational surface singularity, then dimC H 1 (X,
(e − 2)(e − 4).
·x
Proof. Since x is generic, the cokernel of F1 −
→ mF1 has support at points, so
xH 1 (F1 ) ' H 1 (mF1 ). The result now follows from Corollary 1.3.3, Lemma 1.3.4
and Lemma 1.3.5.
Putting all of this together we get the formula for dimC TX2 . We first define
the “correction term”. We will see several other ways of defining this number in
Section 1.4.
Definition 1.3.7. If X is a rational surface singularity, we define the invariant
b mF1 ) .
c(X) := dimC H 1 (X,
Theorem 1.3.8. If X is a rational surface singularity of embedding dimension e
b is the blow up of X, then
and X
dimC TX2 = (e − 2)(e − 4) +
X
dimC T(2X,p)
+ c(X) .
b
b
p∈X
Proof. This follows from Corollary 1.1.7, Corollary 1.3.3 and Proposition 1.3.6.
CHAPTER 1. TX1 - AND TX2 -FORMULAS
32
1.3.3
The T 1 formula.
First notice that Proposition 1.3.1 implies that the exact sequence (1.3.1) extends
(after a twist) to an exact sequence
1
0 → F0 → ΘXb (C) → OC (2C) → mF1 → TX
b (C) → 0 .
(1.3.3)
Only the two first sheaves have support outside C; i.e. have an infinite dimensional H 0 . On the other hand, the sequence induces an exact sequence
b F0 ) → H 0 (X,
b Θ b (C)) → H 0 (X,
b OC (2C)) .
0 → H 0 (X,
X
Now C is an arithmetically Cohen-Macaulay curve in Pe−1 ,(see e.g. [Wah77]). In
b OC (2C)) = H 0 (C, OC (−2)) = 0. Thus the sequence (1.3.3) induces
particular H 0 (X,
b F0 ) ' H 0 (X,
b Θ b (C)). (They are actually isomorphic to
an isomorphism H 0 (X,
X
Der(A), which is seen immediately from Theorem 1.1.5.)
Proposition 1.3.2 tells us that h0 (F1 ) = h0 (mF1 ). Since T 1b is a skyscraper
X
sheaf h0 (T 1b ) = h0 (T 1b (C)) and h1 (T 1b (C)) = 0. Using all this information and
X
X
X
Corollary 1.1.7 the sequence (1.3.3) yields the formula
dimC TX1 = h1 (F0 ) + h0 (F1 )
1
= h1 (ΘXb (C)) + χ(OC (2C)) + h0 (TX
b ) + c(X) .
(1.3.4)
p
π
e of X which factors X
e →
b →
Consider now the minimal resolution X
X
X.
Clearly OXe (−Z) ' p? OXb (−C), so we also have OXe (kZ) ' p? OXb (kC).
If we use the projection formula on ΘXe (Z) we find that
Ri p? ΘXe (Z) ' Ri p? ΘXe ⊗ OXb (C) .
(1.3.5)
It is also true for rational surface singularities that p? ΘXe ' ΘXb ([BW74]), so in
particular, p? ΘXe (Z) ' ΘXb (C). Since H 2 ’s vanish, the Leray spectral sequence
gives in our situation, an exact sequence
b Θ b (C)) → H 1 (X,
e Θ e (Z)) → H 0 (X,
b R1 p? Θ e (Z)) → 0 .
0 → H 1 (X,
X
X
X
Also by (1.3.5) we see that h0 (R1 p? ΘXe (Z)) = h0 (R1 p? ΘXe ).
Consider the exact sequence
0 → ΘXe → ΘXe (Z) → ΘXe ⊗ OZ (Z) → 0 .
We state and prove for lack of reference the following
Lemma 1.3.9. If X is a rational surface singularity, then the induced map
e Θ e ) → H 0 (X,
e Θ e (Z))
H 0 (X,
X
X
is an isomorphism.
(1.3.6)
1.3. THE FORMULAS
33
Proof. There is a well known exact sequence on the resolution of a normal singularity
M
e → Θe →
0 → DerE (X)
OEi (Ei ) → 0
X
(see [Wah76, Proposition 2.2]). After tensoring this sequence with OXe (Z) and applying H 0 we get a commutative diagram
e DerE (X))
e
H 0 (X,
αy
−−−−→
e Θ e)
H 0 (X,
X
β
y
e DerE (X)(Z))
e
e Θ e (Z))
H 0 (X,
−−−−→ H 0 (X,
X
where all the maps are injective. The sheaves OEi (Ei ) and OEi (Ei + Z) on Ei ' P1
have negative degree, so the horizontal maps are also surjective. The cokernel
e DerE (X)
e ⊗ OZ (Z)) which is trivial by a vanishing result –
of α sits in H 0 (X,
e = 0 – of Wahl. See [BK87, Corollary 2.6] for an argument. So
HE1 (DerE (X))
α, and therefore β, is an isomorphism.
e Θ e ⊗ OZ (Z)) is in general
Remark 1.3.10. There is something to prove, since H 0 (X,
X
non-trivial. In fact, if Z is reduced, then it has dimension equal to dimC HE1 (ΘXe )
which again equals the number of −2 components of E ([Wah75, Theorem 6.1]).
In any case we now get from the sequence (1.3.6), the equality h1 (ΘXe (Z)) =
h1 (ΘXe ) − χ(ΘXe ⊗ OZ (Z)). From the Leray spectral sequence for ΘXe , we get
h1 (ΘXb ) = h1 (ΘXe ) − h0 (R1 p? ΘXe ). So finally
h1 (ΘXb (C)) = h1 (ΘXe (Z)) − h0 (R1 p? ΘXe (Z))
= h1 (ΘXe ) − χ(ΘXe ⊗ OZ (Z)) − h0 (R1 p? ΘXe )
= h1 (ΘXb ) − χ(ΘXe ⊗ OZ (Z)) .
Since p? OXe (kZ) = OXb (kC) and R1 p? OXe (kZ) = 0 by the projection formula, we
have p? OZ (2Z) = OC (2C) and R1 p? OZ (2Z) = 0. Thus χ(OC (2C)) = χ(OZ (2Z)).
Putting all this into formula (1.3.4) we get a new version
1
dimC TX1 = h1 (ΘXb ) − χ(ΘXe ⊗ OZ (Z)) + χ(OZ (2Z)) + h0 (TX
b ) + c(X)
= dimC TX1b − χ(ΘXe ⊗ OZ (Z)) + χ(OZ (2Z)) + c(X) .
(1.3.7)
Lemma 1.3.11. If X is a rational surface singularity, then
χ(OZ (2Z)) − χ(ΘXe ⊗ OZ (Z)) = e − 4 .
Proof. We have χ(OZ (2Z)) = 2Z 2 + 1 = −2e + 3 by Riemann–Roch.
We compute χ(ΘXe ⊗OZ (Z)) in a standard manner (see e.g. [BK87, page 109] for
another example). Since X is rational we may construct a “computation sequence”
CHAPTER 1. TX1 - AND TX2 -FORMULAS
34
Z0 , . . . , Zl = Z where Z0 = Ei0 , Z1 = Z0 +Ei1 , . . . , Zl = Zl−1 +Eil with the property
Zk−1 · Eik = 1. If we tensor the exact sequence
0 → OZk (Zk ) → OZk+1 (Zk+1 ) → OEik+1 (Zk+1 ) → 0
with ΘXe , we may compute recursively if we know χ(ΘXe ⊗OEik+1 (Zk+1 )). To compute
this consider the standard exact sequence
0 → ΘEik → ΘXe ⊗ OEik → OEik (Eik ) → 0 .
If k > 0, then after twisting with Zk , we get this sequence on Eik ' P1 :
0 → OEik (3 − bik ) → ΘXe ⊗ OEik (Zk ) → OEik (−2bik + 1) → 0
where bi = −Ei2 . If k = 0 subtract 1 from the degrees of the left and right sheaves.
After adding everything up we get
χ(ΘXe ⊗ OZ (Z)) = 3
l
X
(2 − bik ) − 2 .
k=0
If K is a canonical divisor, then by the adjunction formula we find that −e + 1 =
P
Z 2 = −2 − K · Z = −2 + lk=0 (2 − bik ). So χ(ΘXe ⊗ OZ (Z)) = −3e + 7 and we have
proven the lemma.
Remark 1.3.12. It may be just a curiosity, but the number e − 4 comes from sheaves
of more deformation theoretical interest. Notice that
χ(OZ (2Z)) − χ(ΘXe ⊗ OZ (Z)) = χ(TZ1 (Z)) − χ(ΘZ (Z)) .
This follows from the standard sequence for TZ1 .
If we plug the result of Lemma 1.3.11 into formula 1.3.7 we get
Theorem 1.3.13. If X is a rational surface singularity of embedding dimension e
b is the blow up of X, then
and X
dimC TX1 = (e − 4) + dimC TX1b + c(X) .
1.4
1.4.1
About the correction term c(X).
Alternative definitions
We have not been able to compute c(X) in general, though there are partial results
which we present here. First let us list several other H 1 s which have dimension
c(X).
1.4. ABOUT THE CORRECTION TERM C(X).
35
Proposition 1.4.1. If X is a rational surface singularity, then c(X) equals the
dimension of
b mF1 /m2 F1 )
(i) H 1 (X,
b NA (O b )(−C))
(ii) H 1 (X,
X
b F1 (−C))
(iii) H 1 (X,
b N b (C)).
(iv) H 1 (X,
X/M
Proof. To prove (i) it is enough to show that m2 F1 has support at points. We
claim that the isomorphism in Proposition 1.3.1 (iii) induces locally a surjection
TB1 x2 TA1 (B). Indeed if [φ] is in the kernel K of TA1 (B) → TB1 , then x2 φ(fj ) =
P
P
P
bx2 ∂gj /∂x + bi x2 ∂gj /∂ti = b(∂fj /∂x + ti ∂fj /∂xi ) + bi x ∂fj /∂xi by (1.3.2).
Thus x2 [φ] = 0 in TA1 (B) and K is contained in the kernel of the multiplication map
·x2
TA1 (B) → TA1 (B).
Consider the commutative diagram with exact rows and surjective vertical maps.
0 −−−−→ NA (OXb )(−C) −−−−→ NA (OXb ) −−−−→ NA (OXb )|C −−−−→ 0
α
β
γ
y
y
y
0 −−−−→
mF1
−−−−→
F1
−−−−→
F1 |C
−−−−→ 0
The argument in the proof of Proposition 1.3.2 shows that H 0 (NA (OXb )|C ) = 0 as
well, so H 0 (Ker(γ)) = 0 and H 1 (Ker(α)) injects into H 1 (Ker(β)). But Ker(β) is an
image of π ? Der(P ) ' eOXb so H 1 (Ker(β)) = 0. This proves (ii).
On the other hand α factors surjectively through F1 (−C), which gives (iii). We
have H 1 (NX/M
(C)) ' H 1 (NA (OXb )(−C)) by Proposition 1.3.1.
b
CHAPTER 1. TX1 - AND TX2 -FORMULAS
36
1.4.2
Partial results
The exact sequence in Proposition 1.3.1 sits in the following large commutative
diagram of exact rows and columns.
0
y
0
y
m2 F1 −−−−→
y
0 −−−−→ A1
b
C/X
y
0 −−−−→ T 1
(C) −−−−→ mF1
y
−−−−→
mT 1b (C)
X
y
−−−−→ 0
T 1b (C)
X
y
−−−−→ 0
(1.4.1)
1 (C) −
(C) −−−−→ TC
−−−→ T 1b (OC )(C) −−−−→ 0
X
y
y
y
b
X
C⊂
0
−−−−→
T 2b
X
−−−−→
T 2b
X
−−−−→ 0
We will not prove this, only explain the sheaves and some of the sequences. We use
the notation of Section 1.3.1.
The sheaf T 1 b is the cokernel of Der(OXb , OC ) → OC (C) defined locally by
C⊂X
D 7→ D(x). The sheaf T 1b (OC ) is locally TB1 (B/(x)). The right vertical sequence is
X
induced from the exact sequence 0 → OXb → OXb (C) → OC (C) → 0 and the next
to bottom row is from the Zariski–Jacobi sequence for C → OXb → OC . The map
1 (C) is locally the map xT 1 (B) → T 1
mF1 → TC
A
B/(x) which takes x[φ] to the class of
the homomorphism g j 7→ φ(fj ) + (x). Here g j is the image of gj in PB /(x).
With the help of this diagram we can prove
Proposition 1.4.2. If X is a rational surface singularity, then
(i) c(X) = 0 if the fundamental cycle is reduced.
b T 1 (C)).
(ii) c(X) ≥ dimC H 1 (X,
C
b all have embedding dimension ≤ 4,
(iii) If T 2b = 0, i.e. the singularities on X
X
b T 1 (C)).
then c(X) = dimC H 1 (X,
C
Proof. If the fundamental divisor is reduced, then C is reduced ([Wah77, Proof of
Corollary 3.6]). In this case A1 b has support at points so H 1 (A1 b (C)) = 0.
C/X
C/X
1 (C) → T 2 , and
From the diagram we get an exact sequence 0 → mF1 /m2 F1 → TC
b
X
c(X) = h1 (mF1 /m2 F1 ) by Proposition 1.4.1. This proves the last two statements.
1.4. ABOUT THE CORRECTION TERM C(X).
37
Proposition 1.4.2 allows us to generate examples where c(X) > 0.
b is smooth and C is
Proposition 1.4.3. If X is a rational surface singularity, X
non-reduced, then c(X) > 0.
b = X,
e C = Z is the fundamental divisor and c(X) = h1 (T 1 (Z)).
Proof. In this case X
Z
It follows from [Wah79, 2.6] that H 1 (TZ1 (Z)) ' H 1 (OZ−E (2Z)) where E = Zred .
We claim that H 0 (OZ−E (2Z)) = 0. In [Wah75] Wahl proves that HE1 (OXe (E)) =
0. The proof actually shows that HE1 (OXe (E + Z 0 )) = 0 for any cycle Z 0 with
Z 0 ·Ei ≤ 0 for all irreducible components Ei of E. In particular HE1 (OXe (E +Z)) = 0,
and we may use [Wah76, Lemma B.2] to conclude that H 0 (OZ (E + 2Z)) = 0. But
H 0 (OZ−E (2Z)) injects into this last H 0 .
Thus h1 (TZ1 (Z)) = −χ(OZ−E (2Z)) = (Z − E) · (K − Z) using Riemann–Roch.
(See [Wah79, Proof of Proposition 2.15] for a similar argument.) If we set bi = −Ei2 ,
P
P
Z=
ni Ei and ri = −Z · Ei we find (Z − E) · (K − Z) = (ni − 1)(bi − 2 + ri ).
b = X,
e so all the ri > 0 by Theorem 1.1.1. Thus c(X) > 0
Now we have assumed X
in this case if Z 6= E; i.e. at least one ni ≥ 2.
It is a purely combinatorial problem to make dual graphs for rational singularities
satisfying the conditions in Proposition 1.4.3. The one with lowest multiplicity is
the “standard counter example” to the T 1 and T 2 formulas appearing before this
paper – see e.g. [BK87]. Here is the dual graph:
where
•
' P1
with self-intersection − 3.
• ' P1
with self-intersection − 2.
In fact any exceptional configuration of 4 components with this type of intersection
will have c(X) > 0, as long as the central curve has self-intersection −2 and the
other self-intersections are ≤ −3.
If one extends the three arms off the central −2 curve, then these singularities
will also have c(X) > 0 as long as neighbors of the −2 curve have self-intersection
≤ −4 if the arm has length > 1 and non-end nodes have self-intersection ≤ −3.
Here is an example with e = 7.
where
•
×
•
× ' P1
with self-intersection − 4.
'P
1
with self-intersection − 3.
•'P
1
with self-intersection − 2.
38
CHAPTER 1. TX1 - AND TX2 -FORMULAS
Chapter 2
On the correction term c(X).
2.1
Introduction
In this chapter we will be concerned with c(X) where X is a rational surface sinb → X
gularity. We will keep the notation form chapter 1, so in particular, π : X
e
will denote the first blow up and X will be the minimal resolution. We denote
by E the (reduced) exceptional set for the minimal resolution and C the (possibly
non reduced) exceptional curve of π. The fundamental cycle will be denoted by Z.
Sometimes we will write Zred for E. We will also denote by P the set of singular
b
points on X.
2.2
Some preliminary observations
Given a rational surface singularity X, we have several invariants. Most important
is of course the dualgraph. Many other invariants such as the embedding dimension
and multiplicity is determined by the dualgraph. If X is, say, a cyclic quotient
singularity then also, τ 1 := dimC TX1 and τ 2 := dimC TX2 are determined from the
dualgraph. More generally, if X has reduced fundamental cycle, τ 1 − m and τ 2 are
determined by the dualgraph, where m = dim ESX (C[]) and ESX is the equisingular
deformation functor of Wahl, see [Wah76]. Moreover, τ 2 − H 0 (T 2b ) = (e − 2)(e − 4)
X
is determined by the multiplicity. The following example shows that this does not
hold in general. That is c(X) is not an equimultiple invariant.
Example 2.2.1. Let X be “the standard counter example,” see dualgraph below.
Then c(X) = 1. Then there is a deformation Xt of X such that for generic t, Xt is a
cone over a rational curve. Such rational surface singularity has reduced fundamental
cycle and thus c(Xt ) = 0.
In the following figure, the negative numbers are selfintersection and the positive
numbers denote the corresponding multiplicity in the fundamental cycle.
39
40
CHAPTER 2. ON C(X)
Remark 2.2.2. We have that c(X) is semi-continuous for equimultiple deformations.
Remark 2.2.3. From the proof of Proposition 1.4.3 it follows that c(X) is determined
b is smooth. Note from the T 2 -formula that if c(X) in general
by the dualgraph if X
X
is determined by the dualgraph, the same is true for τ 2 .
2.3
A subspace of H 1 (A1C/Xb (C)) and a description of H 1 (mF1 ).
In this section we will give a local deformation theoretic description of mF1 /m2 F
and A1 b (C). We will describe a subspace of H 1 (A1 b (C)) which has a clear deC/X
C/X
formation theoretic meaning. The quotient of H 1 (A1
isomorphic to
b
C/X
H 1 (mF1 /m2 F).
(C)) by this subspace is
1 (C) of Section 1.4.2 induces an isomorProposition 2.3.1. The map mF1 → TC
1 (C).
1
2
1
1
phism of mF /m F with the image of TC (C) ×T 1 (OC )(C) T 1b (C) in TC
X
b
X
Proof. From 1.4.1 in Section 1.4.2 we have the commutative diagram
0
y
F1 ⊗ m/m2 −−−−→
y
1 (C)
TC
ρy
T 2b
X
T 1b (C)
X
ψy
−−−−→ 0
φ
−−−−→ T 1b (OC )(C) −−−−→ 0
X
y
'
−−−−→
T 2b
X
1 (C). Let
with exact rows and columns. We identify F1 ⊗ m/m2 with its image in TC
1
1
b The image of T 1 (C) × 1
U be an open subset of X.
T (OC )(C) T b (C)(U ) in TC (C)(U )
C
b
X
X
1 (C)(U )|∃ξ ∈ T 1 (C)(U ) such that ψ(ξ) = φ(σ)}. It is clear that
is S := {σ ∈ TC
b
X
F1 ⊗ m/m2 (U ) ⊂ S. Let σ ∈ S. Then φ(σ) maps to 0 in T 2b (U ). Thus from the
X
diagram, ρ(σ) = 0 and σ ∈ F1 ⊗ m/m2 (U ).
Remark 2.3.2. Since OXb (−C) is a locally free sheaf, the twist does not alter the
local meaning of the sheaves. This gives the following meaning of mF1 /m2 F1 . Let
2.3. A SUBSPACE OF H 1 (A1
b
C/X
(C)) AND A DESCRIPTION OF H 1 (MF1 ). 41
b be an open such that O b (−C)(U ) is free. Then mF1 /m2 F1 (U ) is the vector
U ⊂X
X
space of infinitesimal (over C[]) deformations C U of CU := C ∩ U such that there
is a deformation U of U with C U ⊂ U .
Lemma 2.3.3.
1
H 1 (A1C/Xb (C)) ' H 1 (TX⊂
b (C))
X
Proof. This follows from diagram 1.4.1 and the fact that m2 F1 has support on points.
1 (C) factors trough
Note also in diagram 1.4.1 that the map T 1 b (C) → TC
C⊂X
mF/m2 F. In fact we have the following commutative diagram.
H 1 (A1 b (C)) −−−−→
C/X
'y
H 1 (T 1
b
C⊂X
H 1 (mF1 )
'y
(C)) −−−−→ H 1 (F1 ⊗ m/m2 )
The upper map comes from the map in Proposition 1.3.1.
1 → T 1 (O ) and
is the kernel of the natural map TC
C
b
X
b
has the following deformation theoretic meaning. Let U ⊂ X be an open affine and
let U = U ⊗ C[]. Then T 1 b (U ) is the vector space of infinitesimal (over C[])
Remark 2.3.4. The sheaf T 1
b
C⊂X
C⊂X
deformations C U of CU := C ∩ U such C U ⊂ U .
We will now analyze the map
ζ
1
H 1 (TC⊂
→ H 1 (F1 ⊗ m/m2 ).
b (C)) −
X
b From the long exact sequence in local cohomology, we get
Let P = Sing X.
'
b \ P, T 1
b \ P, F1 ⊗ m/m2 )
H 0 (X
−−−→ H 0 (X
b (C)) −
C⊂
X
y
y
HP1 (T 1 b (C))
C⊂
X
φy
−−−−→
ξ
HP1 (F1 ⊗ m/m2 )
y
b T1
H 1 (X,
b (C))
C⊂X
y
−−−−→
ζ
b F1 ⊗ m/m2 )
H 1 (X,
y
b \ P, T 1
H 1 (X
b
C⊂X
where the columns are exact.
'
b \ P, F1 ⊗ m/m2 )
(C)) −−−−→ H 1 (X
42
CHAPTER 2. ON C(X)
Lemma 2.3.5.
φ(ker ξ) = ker ζ
Proof. Diagram chasing.
b be an affine neighborhood
We want to describe ker ξ more closely. Let U ⊂ X
of P. The by excision we have
HP1 (T 1 b (C)) −−−−→
C⊂
X
ξy
H 0 (U \ P, T 1
b
C⊂X
(C))/H 0 (U, T 1 b (C))
C⊂X
y
HP1 (F1 ⊗ m/m2 ) −−−−→ H 0 (U \ P, F1 ⊗ m/m2 )/H 0 (U, F1 ⊗ m/m2 ).
Thus we see that ker ξ coincides with the image of H 0 (U, F1 ⊗m/m2 ) in HP1 (T 1 b (C))
C⊂X
through the map
1
1
1
H 0 (U, F1 ⊗m/m2 ) → H 0 (U \P, F1 ⊗m/m2 ) ' H 0 (U \P, TC⊂
b (C)) → HP (TC⊂X
b (C)).
X
Composing with φ we have the following.
b
Proposition 2.3.6. Let U be an affine neighborhood of the singular set P = Sing X.
There is a map
α
1
H 0 (U, F1 ⊗ m/m2 ) −
→ H 1 (TC⊂
b (C))
X
such that
coker α ' H 1 (F1 ⊗ m/m2 ).
Proof. Note that ζ is surjective. Thus the conclusion follows from Lemma 2.3.5 and
the remarks above.
Remark 2.3.7. The advantage of this observation is the deformation theoretic meaning of H 0 (U, F1 ⊗ m/m2 ) and that α is a natural map. Furthermore, as we will see,
it is possible to calculate H 1 (T 1 b (C)).
C⊂X
2.4
Calculation of H 1 (A1C/Xb (C)).
The aim of this section is to enable calculation of H 1 (A1 (C)). From 2.4.1 it follows
that this gives a bound for c(X).
e Write G = P
We will first define some divisors on X.
Ei ·Z6=0 Ei and F =
P
E
as
reduced
divisors.
Note
that
E
=
F
+
G.
Further
write the funEi ·Z=0 i
P
P
damental cycle as Z = mi Ei . Then put H = Ei ·Z<0 (mi − 1)Ei .
Recall the exact sequence
1
0 → A1 (C) → mF1 → TX
b → 0,
(2.4.1)
2.4. CALCULATION OF H 1 (A1
b
C/X
(C)).
43
see Proposition 1.3.1.
e \G ' X
b \ P, by Tjurinas Theorem. Restricted
Now π|X\F
is an isomorphism X
e
b \ P the sheaves A1 (C) and mF1 are isomorphic and it is not difficult (and it
to X
will follow from the proof of Lemma 2.4.2) that they are isomorphic to π∗ OH (2Z)
e \ G. As an application we mention that if for
which we identify with OH (2Z) on X
every Ei such that Ei · Z < 0 and Ei ∩ F 6= ∅ it follows that Ei 6⊂ Supp H, then
b mF1 ) = H 1 (X,
e OH (2Z)), and hence c(X) = h1 (X,
e OH (2Z)).
H 1 (X,
b Consider the exceptional divisor C with
Now we define a particular divisor on X.
its natural scheme structure. Denote by Cred the corresponding reduced scheme. As
we know, C is a locally principal subscheme, but in general Cred is not. Consider
b Let Cred =
a sufficiently small open neighborhood U of a singular point on X.
n
∪i=1 Cred,i , where Cred,i are the irreducible components defined by sheaves of ideals
Q
Ii . Away from the singular point in U, there are ri such that C is defined by ni=1 Iri i .
But since C have no embedded components, C is defined by this on the whole of U.
Q
b we get
We consider now the sheaf Iri i −1 on U, and considering an open cover of X
a sheaf of ideals and a corresponding subscheme which we denote by C − Cred . With
the same notation, we denote the ideal sheaf by OXb (−C + Cred ). We also denote by
OC−Cred the quotient of OXb by this sheaf.
Remark 2.4.1. In general, C − Cred is not a Cartier divisor.
Above we defined the divisor C − Cred . The following lemma gives the meaning
of the this divisor.
Lemma 2.4.2.
b OC−C (2C)) ' H 1 (X,
b A1 (C))
H 1 (X,
b
red
C/X
Proof. Consider the exact sequence
θXb → OC (C) → A1C/Xb → 0.
From the above discussion there is a surjective map OC (C) → OC−Cred (C). We claim
that the composed map
θXb → OC (C) → OC−Cred (C)
b be an open such
is the zero map. We check this locally. So let U = Spec A ⊂ X
Q ri
Q
that C is defined by Ii and such that C − Cred is defined by Iri i −1 . Consider
Q
Q
D ∈ DerC (A) and f ∈ Iri i . Then D(f ) ∈ Iri i −1 and this proves the claim and
establish the existence of a surjective map A1 b → OC−Cred (C). We already know
C/X
that the kernel has support one points, so the result follows.
To describe C − Cred in a neighborhood is not easy, but we may relate C − Cred
e as the following lemma shows.
to the divisor H on X
44
CHAPTER 2. ON C(X)
Lemma 2.4.3. We have
b A1 (C)) ' H 1 (X,
e OH (2Z)).
π∗ OH (2Z) = OC−Cred (2C) and H 1 (X,
b
C/X
Proof. It is clear that π∗ OXe (−H) = OXb (−C +Cred ), see [Har77, Ex. III.3.5] and it is
clear that R1 π∗ OXe (−H) = 0. Thus π∗ OH = OC−Cred . From the projection formula
and the fact that π ∗ OXb (C) = OXe (Z) it follows that π∗ OH (2Z) = OC−Cred (2C).
The next part of the lemma follows from the exact sequence
e OH (2Z)) → H 0 (R1 π∗ OH (2Z)) → 0
b π∗ OH (2Z)) → H 1 (X,
0 → H 1 (X,
since it is clear that H 0 (R1 π∗ OH (2Z)) = 0.
Remark 2.4.4. There is a map
1
TX1 → H 0 (TX
b)
going trough H 0 (mF1 ) = H 0 (F1 ). This map is surjective if and only if the map
1
H 0 (mF1 ) → H 0 (TX
b (C))
is surjective. Let in any case b = b(X) be the dimension of the cokernel of this map,
b A1 (C)). Then c = c(X) = a − b, meaning that if a = 0
and let a = a(X) = h1 (X,
b
C/X
then also b = 0. But as we will see we may have c = 0 and a 6= 0.
The following examples shows how the above lemmas may be used to calculate
a(X). They also shows that a(X) need not be zero although c(X) is.
Example 2.4.5. Consider the following dual graph:
It is the graph of a rational singularity. The numbers gives the coefficient in the
fundamental cycle. The square denotes a curve with self intersection −m, where m
is the multiplicity of the singularity, the circles denotes curves with self intersection
−2. Let E1 denote the curve corresponding to the leftmost circle. We have H = 2E1 .
Consider the exact sequence
0 → OE1 (2Z − E1 ) → O2E1 (2Z) → OE1 (2Z) → 0.
We have 2Z·E1 = −2 and (2Z−E1 )·E1 = 0, so H 0 (OE1 (2Z)) = 0 and H 0 (O2E1 (2Z)) =
H 0 (OE1 (2Z − E1 )) = C. Further
1
1
χ(OH (2Z)) = 2Z · H − H(H + K) = −4 − (−8 + 0) = 0.
2
2
Thus a = 1. But in [dJ98] it is proved that c = 0.
b
2.5. SINGULARITIES WITH RATIONAL DOUBLE POINTS ON X.
45
Example 2.4.6. Consider the following dual graph:
It is the graph of a rational singularity. The numbers gives the coefficient in the
fundamental cycle. The square denotes a curve with self intersection −m, where m
is the multiplicity of the singularity, the circles denotes curves with self intersection
−2. Let E1 be the curve corresponding to the rightmost vertex. We have H = E1 ,
and since E1 · Z < 0 it follows that H 0 (OH (2Z)) = 0. Further
1
1
χ(OH (2Z)) = 2Z · H − H(H + K) = −2 − (−2 + 0) = 1.
2
2
Thus a = 1 but Theo has proved that c = 0, so b = 1.
2.5
b
Singularities with rational double points on X.
b has only rational double points.
In this section we will consider the case when X
b be a singular point, and let U = Spec B be an affine neighborhood
Let p ∈ X
of p of the form B = PB /IB where PB = C[t0 , t1 , . . . , tn ] as in the notation of
Chapter 1. We may find elements b1 , b2 , b3 ∈ PB such that the images b1 , b2 , b3 in
α
B generate mp ⊂ B locally at p. Define a map P 0 = C[z1 , z2 , z3 ] −
→ P by mapping
z1 7→ b1 , z2 7→ b2 , z3 7→ b3 . Let I 0 = α−1 (IB ). Then I 0 = (g). Assume that the image
of x ∈ P 0 in B defines C ∩ U, that is, x maps to the class of t0 in B. We define a P 0 β
algebra homomorphism P = P 0 [z0 ] −
→ PB by mapping z0 to t0 . Let α : P 0 /I 0 → B
be the injective map induced by α. The localization of this map is étale. We now
make the following assumption
α induces an isomorphism P 0 /I 0 ' B.
(2.5.1)
Then I := β −1 (IB ) = (g, z0 − x). We put g1 = g and g2 = z0 − x. Consider now the
map
P 4 = DerC (P ) → HomP (I, B) = B 2
given by
(
{pi }0≤i≤3 7→
3
∂gj X ∂gj
p0 x
+
pi
∂z0
∂zi
i=1
)
j=1,2
and let F be the cokernel. Then clearly there is a surjective map F → TB1 , and the
kernel K is the cyclic submodule of F generated by the element
∂gj
.
∂z0 j=1,2
46
CHAPTER 2. ON C(X)
The kernel of the surjection B → K is
)
( 3
∂g
∂gj X ∂gj
j
= p0 x
+
for some p0 , . . . , p3 = a + (x),
b b
pi
∂z0
∂z0
∂zi
i=1
with a as in the proof of Proposition 1.3.1, so we have the exact sequence
0 → B/a + (x) → F → TB1 → 0.
(2.5.2)
We have the following commutative diagram.
D
E
∂
x ∂x
, ∂t∂1 , . . . , ∂t∂n ⊗PB B −−−−→ HomPB (IB , B) −−−−→ mF1 (U ) −−−−→ 0
y
y
D
E
z0 ∂z∂ 0 , ∂z∂ 1 , ∂z∂ 2 , ∂z∂ 3 ⊗P B −−−−→ HomP (I, B) −−−−→
F
−−−−→ 0
where the brackets denotes the generated submodule of DerC (PB ) and DerC (P )
respectively, and where the vertical maps are given by composition with β. Thus
there is a natural map γ : mF1 (U ) → F and in fact we have a commutative diagram
0 −−−−→ A1 (C)(U ) −−−−→ mF1 (U ) −−−−→ T 1b (U ) −−−−→ 0
X
y
y
y
0 −−−−→ B/a + (x) −−−−→
F
−−−−→
TB1
−−−−→ 0
where the leftmost and rightmost vertical maps are isomorphisms. Thus γ is an
isomorphism. Consider now the surjection B 2 → F, and assume (a1 , a2 ) 7→ 0. This
is the same as to say that there exists b0 , b1 , b2 and b3 , such that
∂g
∂g
∂g
+ b2
+ b3
∂z1
∂z2
∂z3
∂x
∂x
∂x
a2 = b0 x + b1
+ b2
+ b3
.
∂z1
∂z2
∂z1
a1 = b1
(2.5.3)
(2.5.4)
This is the same as saying that a1 = D(g) and a2 = D(x) modulo (x), where
b
2.5. SINGULARITIES WITH RATIONAL DOUBLE POINTS ON X.
47
D ∈ DerC (P 0 ), P 0 = C[z1 , z2 , z3 ]. Thus we have
0
x
0
x
0
x
−−−−→
TB1
x
−−−−→ 0
DerC (P 0 ) ⊗P 0 B −−−−→ B ⊕ B/(x) −−−−→
x
x
F
x
−−−−→ 0 (2.5.5)
0 −−−−→
−−−−→
J
x
DerC (B)
x
−−−−→
0
B
x
B/(x)
x
−−−−→ A1 (C)(U ) −−−−→ 0
x
0
0
where the map DerC (P 0 ) → B ⊕ B/(x) is given by D 7→ (D(g), D(x)) and where
∂g ∂g ∂g
,
,
.
J=
∂z1 ∂z2 ∂z3
We have assumed 2.5.1 to hold. In general, α is étale at the point in consideration, hence corresponds to a locally birational map. Thus we will have a diagram
b by
corresponding to 2.5.5 for the local situation in the analytic topology. Since X
assumption only have rational double points, we may find a smooth manifold M of
b ⊂ M and such that this locally (in the analytic topology)
dimension 3 such that X
b in M. Then this
fits with the embedding B = P 0 /(g). Let I be the ideal sheaf of X
is a locally principal sheaf of ideals, and clearly we may find a surjective morphism
OXb → T 1b . Let J be its kernel. The considerations above lead to the following
X
b
commutative diagram of sheaves on X.
0
x
0
x
−
−−−−
→
J(C)
x
0
x
−
−−−−
→
OXb (C)
x
0
x
1
−−−−
→ 0
−
−−−−
→ TX
b (C) −
x
0 −
−−−−
→ θXb (log C)(C) −
−−−−
→ θM (C) ⊗ OXb −
−−−−
→ OXb (C) ⊕ OC (2C) −
−−−−
→
x
x
x
0 −
−−−−
→ θXb (log C)(C) −
−−−−
→
x
0
θXb (C)
x
0
−
−−−−
→
OC (2C)
x
0
mF1
x
−
−−−−
→ 0
−
−−−−
→ A1 (C) −
−−−−
→ 0
x
0
(2.5.6)
48
2.6
CHAPTER 2. ON C(X)
Rational surface singularities with almost reduced
fundamental cycle
Let X be a rational surface singularity with fundamental cycle Z.
Definition 2.6.1. We say that Z is almost reduced if it is reduce on all non −2
curves.
Let X be a rational surface singularity with almost reduced fundamental cycle.
Consider a connected subgraph Γ1 of the dualgraph Γ of X containing only vertices
corresponding to −2-curves. Assume further that Γ1 is a maximal such subgraph
in the following sense: All vertices in Γ with an edges to a vertex in Γ1 corresponds
to non-−2-curves. The graph Γ1 will necessarily be the dualgraph of a rational
double point, and a subgraph Γ1 together with all edges in Γ which connects to
Γ1 will be called a rational double point configuration. Thus a rational double
point configuration is the graph of a rational double point with some extra edges
attached. If there are n such edges we call the rational double point configuration
an n-configuration. Thus the 0-configurations, are the rational double points. In
addition to this it may be checked that we only have 1-, 2- and 3-configurations.
Proposition 2.6.2. The only possible rational double point configurations are the
following:
1-configurations
2-configurations
3-configurations
An
*
Dn
*
E6
E7
2.7. PROOF OF THEOREM 2.6.3.
49
Proof. This is a routine check involving the rationality criterion.
Theorem 2.6.3. Let X be a rational surface singularity with embedding dimension
e ≥ 4 and with almost reduced fundamental cycle Z. Assume that the fundamental
cycle Z intersects all non −2-curves negatively. Then c(X) is the number of *marked (see Proposition 2.6.2) configurations in the dual graph.
The proof of this theorem is not very difficult, and is done by checking the
possible rational double point configurations. We give the proof in the next section.
2.7
Proof of Theorem 2.6.3.
We first remark that there are no 0-configurations, so we only have 1, 2 and 3configurations.
We have c(X) = h1 (mF1 ), and from the fundamental exact sequence
1
0 → A1 (C) → mF1 → TX
b → 0,
see 2.4.1, and the proof of Lemma 2.4.2 we know that the one dimensional part of
the support of mF1 , is contained in the support of C − Cred . Thus
H 1 (mF1 ) = ⊕H 1 (Ui , mF1 )
ei =
where Ui are neighborhoods of the connected components of C − Cred . Let U
e By the hypothesis it is clear that each U
ei looks as one of the following:
Ui ×Xb X.
Here RDP means a configuration of curves corresponding to a rational double point.
P
Let ci = h1 (Ui , mF1 ), so that c =
ci . From the description above it is clear
1
that mF may be described in terms of the exceptional curve C. This means that
H 1 (Ui , mF1 ) may be computed separately.
ei with this configuration
Remark 2.7.1. Given a rational double configuration, any U
will be biholomorphic. This may be deduced using the tautness of the rational
double points.
The work of Theo de Jong, see [dJ98], implies that 1-configurations have ci = 0.
For 2- and 3-configurations, we check case by case. We do this by choosing particular
representations of Ui corresponding to each rational double point configuration.
50
2.7.1
CHAPTER 2. ON C(X)
The An -case.
We will first consider the An configurations, and we start with the 3-configurations
and consider then 2-configurations, thereby completing the proof for rational double
point configuration of type An .
3-configurations.
One may check that the only possibility is the following.
The number at each vertex gives the multiplicity of the corresponding exceptional
component in the fundamental cycle. There are k + 1 vertices with multiplicity q.
b Thus Ui has an Aq−2 and a Aq+k−2
The circled vertices are those contracted in X.
singularity. We may represent Ui as follows: Let U 1 = Spec B 1 and U 2 = Spec B 2
cover Ui and let xi ∈ B i define C ∩ U i , where
B 1 = C[z1(1) , z2(1) , z3(1) ]/(g1 ) g1 = z1(1) z2(1) − z3(1)
q−1
B 2 = C[z1(2) , z2(2) , z3(2) ]/(g2 ) g2 = z1(2) z2(2) − z3(2)
q+k−1
x1 = z1(1) z3(1)
(
z1(2) z3(2) + z (2) q2 if k > 0
x2 =
z1(2) z3(2)
if k = 0
Actually, x2 does only define C ∩ U 2 in a smaller neighborhood of C, but for the
calculations we will do, this will not matter. The transition between U 1 and U 2 is
given by
−1
z2(2) = z2(1)
z3(2) = z3(1)
The given values for xi may easily be checked by considering the total transform to
the resolution of U i . To find the divisors and check the transition between U 1 and
e i of the An
U 2 , one may use the following description of the minimal resolution U
2.7. PROOF OF THEOREM 2.6.3.
51
e i is covered by V0 , . . . , Vn where Vj = Spec C[uj , vj ].
singularities. The manifold U
i
i
e → U is given by
The map U
j
z1(i) 7→ uj+1
z1(i) 7→ ujj vjj+1
j vj
n−j n+1−j
n+1−j n−j
(i)
(i)
for j odd.
for j even, z2 7→ uj vj
z2 7→ uj
vj
(i)
(i)
z3 7→ uj vj
z3 7→ uj vj
(2.7.1)
1
1
Now we calculate H (Ui , A (C)). Since
ei , OH (2Z)),
H 1 (Ui , A1 (C)) ' H 1 (U
by Lemma 2.4.2, we may calculate on the resolution. Here H = (q − 1)E0 where
E0 is curve corresponding to the exceptional component which is not contracted.
ei , OH (2Z)) = 1. This may be seen with help of Riemann-Roch,
We claim that h1 (U
but we will need the generator, so we calculate the group explicitly. We may take
W0 = Spec C[u0 , v0 ] and W1 = Spec C[u1 , v1 ] as covering E0 . The transition is given
by u0 = u11 and v0 = u21 v1 . Now, assuming k > 0, (the case k = 0 is left to the
reader) we have
H 0 (W0 , OH (2Z)) =
1
q−1
2q 2q C[u0 , v0 ]/(v0 )
u0 v0
H 0 (W1 , OH (2Z)) =
1
q−1
2q−2 2q C[u1 , v1 ]/(v1 )
u1 v1
H 0 (W0 ∩ W1 , OH (2Z)) =
1
2q C[u0 , v0 ,
u2q
0 v0
1
]/(v0q−1 ),
u0
fi , OH (2Z)) = H 0 (W0 ∩ W1 , OH (2Z))/H 0 (W0 , OH (2Z)) + H 0 (W1 , OH (2Z))
H 1 (U
and it is easily seen that {
1
2q
u2q
0 v0
·
1
u0 }
is a C-basis. From the diagram
θM (C) −−−−→ OXb (C) ⊕ OC (2C) −−−−→ mF1 −−−−→ 0
x
x
x
θXb (C) −−−−→
OC (2C)
(2.7.2)
−−−−→ A1 (C) −−−−→ 0
it is clear that an element in H 1 (A1 (C)) may be represented by an element in
.
H 0 (U 1 ∩ U 2 , OC (2C)) ' Bz (1) (x1 )
2
and that, in order to show ci = 1, it is enough to show that the generator does not
map to zero in H 1 (mF1 ). Using 2.7.1, we find that 2q1 2q · u10 in H 0 (W0 ∩W1 , OH (2Z))
u0 v 0
52
CHAPTER 2. ON C(X)
maps to 1/z2(1) in H 0 (U 1 ∩ U 2 , OC (2C)). From 2.7.2 it is clear that 1/z2(1) 7→ 0 if and
only if we have
1
0, (1)
z2
= (a1 , b1 ) + (a2 , b2 ) + (D(g), D(x1 )) ,
(2.7.3)
in B 1(1) ⊕ B 1(1) /(x1 ), where (ai , bi ) come from H 0 (U i , OXb (C) ⊕ OC (2C)) and
z2
z2
D ∈ DerC (C[z1(1) , z2(1) , z3(1) ,
1
]).
z2(1)
Since we are twisting by OXb (2C) and
x21
1
,
=
2
k
2
(1)
(1)
x2
z2 (z3 z2(1) + 1)2
(assuming k > 0) from 2.7.3 we have
1
1
q+k−1 (1) (1) −1 (1)
, z3 ) + D(x1 )
z2 , z 2
p(z3(1)
= b1 +
(1)
2 (1) k (1)
(1)
2
z2
z2 (z3 z2 + 1)
in
b1
B 1(1)
z2
∈ B1.
(x1 ) = C[z2(1) , z2(1)
, z3(1) , ]/(z3q ), where p is a polynomial in 3 variables and
But since D(x1 ) = z1(1) D(z3(1) ) + z3(1) D(z1(1) ) ∈ (z3(1) ), and
1
(1) 2
−1
(1) k
z2 (z3
(1)
z2 +
1)2
p(z3(1)
q+k−1
1
(1) 2
z2
z2(1) , z2(1)
−1
, z3(1) ) =
k
(1 − z3(1) z2(1) + z3(1)
2(k−1)
2
z2(1) − · · · )(z3(1) q + h(z2(1)
−1
))
(h polynomial in one variable) we must have
1
1
1
= b1 + z3(1) f + (1) 2 g( (1) )
z2(1)
z
z2
2
−1
in C[z2(1) , z2(1) , z3(1) , ]/(z3q ) where f ∈ C[z2(1) , z2(1)
in one variable. This is impossible.
−1
, z3(1) , ]/(z3q ) and g is a polynomial
2-configuration.
There are two possibilities for 2-configurations. The first is the following.
2.7. PROOF OF THEOREM 2.6.3.
53
There are again k + 1 vertices with multiplicity q. The circled vertices are those
b Thus Ui has an Aq−1 and a Aq+k−2 singularity. Let U 1 = Spec B 1
contracted in X.
and U 2 = Spec B 2 cover Ui . Let xi ∈ B i define C ∩ U i . It may be assumed that
B 1 = C[z1(1) , z2(1) , z3(1) ]/(g1 ) g1 = z1(1) z2(1) − z3(1)
q
B 2 = C[z1(2) , z2(2) , z3(2) ]/(g2 ) g2 = z1(2) z2(2) − z3(2)
q+k−1
x1 = z1(1)
(
z1(2) z3(2) + z (2) q2 if k > 0
x2 =
if k = 0
z1(2) z3(2)
We claim that H 1 (Ui , mF1 ) = 0. Let P1 and P2 be the two components of P ∩ Ui .
Consider the diagram
HP11 (mF1 ) ⊕ HP12 (mF1 )
x
−−−−→ H 1 (mF1 ) −−−−→ 0
x
HP11 (A1 (C)) ⊕ HP12 (A1 (C)) −−−−→ H 1 (A1 (C)) −−−−→ 0
The same calculations as for 3-configurations give that h1 (A1 (C)) = 1 and that the
1
class of (1)
in
z2
H 0 (U 1 ∩ U 2 , A1 (C))
represent a generator for H 1 (A1 (C)). Recall that
HP1j (A1 (C)) = H 0 (U j \ Pj , A1 (C))/H 0 (U j , A1 (C))
an similarly for HP1j (mF1 ). The map HP11 (A1 (C)) ⊕ HP12 (A1 (C)) → H 1 (A1 (C)) on
the level of representatives (H 0 (U 1 \ P1 , OXb (2C)) ⊕ H 0 (U 2 \ P2 , OXb (2C)) → B 1(1) )
z2
is given by (a1 , a2 ) 7→ a1 + a2 , so it is clearly enough to see that (0, 1/z2(1) ) to maps
54
CHAPTER 2. ON C(X)
zero in HP11 (mF1 ) ⊕ HP12 (mF1 ). Since D(x1 ) = D(z1(1) ) for any derivation D we may
choose
1
D ∈ DerC (C[z1(1) , z2(1) , z3(1) , (1) ])
z2
so that (D(g1 ), D(x1 )) = (1, 1/z2(1) ). Then from diagram 2.7.2, this means that the
1
in HP11 (A1 (C)) maps to zero in HP11 (mF1 ).
class of (1)
z2
The next case is the following.
There are k + 1 vertices with multiplicity q. We will assume k > 0 since the case
k = 0 is already checked. So, Ui has an Aq−2 and a Aq+k−2 singularities. Let
U 1 = Spec B 1 and U 2 = Spec B 2 cover Ui . Let xi ∈ B i define C ∩ U i . It may be
assumed that
B 1 = C[z1(1) , z2(1) , z3(1) ]/(g1 )
g1 = z1(1) z2(1) − z3(1)
q−1
x1 = z1(1) z3(1)
B 2 = C[z1(2) , z2(2) , z3(2) ]/(g2 )
g2 = z1(2) z2(2) − z3(2)
q+k
x2 = z1(2) + z (2) 3 .
q
It is easy to find
D ∈ DerC (C[z1(2) , z2(2) , z3(2) ,
1
])
z2(2)
such that (D(g2 ), D(x2 )) = (1, 1/z2(2) ). As above this will give H 1 (Ui , mF1 ) = 0.
2.7.2
The Dn -case
There are no 3-configurations, so we only need to consider 2-configurations. Depending on the parity of n, there are two possibilities. We will assume that n is
even. The other case is similar and will be left to the reader. When n ≥ 4 is even
the corresponding Dn looks as follows
2.7. PROOF OF THEOREM 2.6.3.
55
b Corresponding to these curves
The circled curves are the ones contracted in X.
there is an An−1 singularity which we consider as Spec C[z1 , z2 , z3 ]/(z1 z2 − z3n ). We
assume that locally, C is given by x ∈ C[z1 , z2 , z3 ]. We list three important charts
e corresponding to the configuration above.
on X
n−1
z1 = unn−1 vn−1
z2 = vn−1
z3 = un−1 vn−1
2 (1 − un−2 v n−3 ) 2
x∗ = un−1 vn−1
n−1 n−1
z1 = u21 v1
v1n−1
z2 = un−2
1
z3 = u1 v1
x∗ = u1n−1 v12 (v1 − 1) 2
z1 = v0
z2 = un0 v0n−1
z3 = u0 v0
x∗ = u0 v02 (u20 v0 − 1) 2
n
n
n
n
n
Remark 2.7.2. One may deduce from the above expressions for x∗ that
n
−1 2
n
X
− 1 n2 −k−1 2k+1
2
.
z3
x = z 2 z3 +
z1
k
k=0
We will however not use this.
Let E0 be the compact curve in the configuration above which is not contracted
b and assume that W0 and W1 cover E0 . We may assume
in X,
W0 = Spec C[u1 , v1 ]
1
2
v1 = u0 v 0 + 1 u1 = 0
u
W1 = Spec C[u0 , v 0 ]
and
n
n
Z ∩ W0 = Spec C[u1 , v1 ]/(un−1
v12 (v1 − 1) 2 )
1
n
Z ∩ W1 = Spec C[u0 , v 0 ]/(v 0 2 )
It is now easy to see that H 1 (W0 ∪ W1 , OH (2Z)) is one dimensional and that we
may take
n
1
1
1
1
·
∈ H 0 (W0 ∩W1 , OH (2Z)) = 2n−2
C[u1 , v1 , ]/((v1 −1) 2 −1 )
2n−2
n
n
u1
u1
(v1 − 1) u1
u1
(v1 − 1)
56
CHAPTER 2. ON C(X)
b which corresponds 1 E0 in X
e may be covered
as a generator. The part of C in X
n
by affines U1 and U2 , where we identify U1 and W1 . This gives
1
02 0
U1 = Spec C[u0 , v 0 ]
z1 = u0 2 (u v + 1)
1
(u0 2 v 0 + 1)n−1
z2 = u0 n−2
U2 = Spec C[z1 , z2 , z3 ]/(z1 z2 − z3n ) z3 = u10 (u0 2 v + 1)
b ⊂ M is given by
We now assume that X
2
U1 = Spec C[u0 , v 0 , w0 ]/(u0 w0 − u0 v 0 + 1) ⊂ Spec C[u0 , v 0 , w0 ]
and
U2 = Spec C[z1 , z2 , z3 ]/(z1 z2 − z3n ) ⊂ Spec C[z1 , z2 , z3 ].
Now assume that
1
(v1
u2n−2
1
−
1)n
·
1
7→ 0
u1
in H 1 (U1 ∪ U2 , mF1 ). As in the case of An 3-configurations this gives
1
1
n n −1
= b1 + 0 2 · f + v 0 2 D(v 0 )
0
u
2
u
n
in C[u0 , v 0 , u10 ]/(v 0 2 ) where b1 ∈ H 0 (U1 , OXb ), f = f ( u10 2 , v 0 ) is a polynomial in u10 2 and
v 0 , and D ∈ DerC (C[u0 , v 0 , u10 , w0 ]). But again this is impossible and this concludes
the proof.
Chapter 3
Equisingular deformations of
sandwiched surface singularities
3.1
Introduction
In the study of normal surface singularities one attaches to a normal surface singularity X, the dualgraph of resolution Γ. Given such Γ one may ask if this determines
X. H. Laufer gives in [Lau73] an answer to this question by listing all dual graphs
with this property. However, generally there are nontrivial families of normal surface singularities with the same dualgraph. If we want to use deformation theory to
study such families, we are lead to a notion of equisingular deformations. A foundation for such a theory was given by Wahl in [Wah76]. In this work, the functor
of equisingular deformations, ESX , of a normal surface singularity X, is defined.
Moreover, it is proved that it is a subfunctor of the functor of all deformations.
The aim of this paper is to describe these equisingular deformations for sandwiched singularities.
A sandwiched singularity is a normal surface singularity which birationally dominates a smooth surface. Sandwiched singularities are rational and include all cyclic
quotient singularities. More generally any rational singularity with reduced fundamental cycle is sandwiched. The sandwiched singularities were studied by several
authors, among others, de Jong and van Straten [dJvS95] and Spivakovsky [Spi90a].
In [dJvS95] the deformation theory of sandwiched singularities is studied. Their results give a good understanding of the versal base space, but only “up to equisingular
deformations.”
Of importance is a particular construction of sandwiched singularities. It was
observed by Spivakovsky, [Spi90a], that a sandwiched singularity may be obtained
from an embedded resolution of a plane curve singularity by contracting rational
curves. This was used by de Jong and van Straten who considered one parame57
58
CHAPTER 3. EQUISINGULAR DEFORMATIONS
ter δ-constant families of plane curves and showed that such corresponds to one
parameter families of sandwiched singularities. We restrict our attention to equisingular families of plane curves. Doing this, we get an even better correspondence:
We show that to an equisingular flat deformation of a plane curve singularity there
corresponds an equisingular (in the sense of Wahl, see [Wah76]) flat deformation
of sandwiched singularities. Moreover all equisingular deformations of sandwiched
singularities may be obtained this way. To be precise we show that there is a smooth
map
ESC → ESX
between the two functors of equisingular deformations. This map is the composite
of a map
ESC → Def Y ,
where Y is a certain surface on which the sandwiched singularity X lies, with the
restriction map. We are also able to describe the kernels of these two maps on
tangent level.
Thus we are able to find many surface singularities which are not determined by
their dualgraph. In fact we show (when the curve is irreducible) that if the embedded resolution of the plane curve is sufficiently non minimal, all of the equisingular
moduli of the curve is transfered to the sandwiched singularity. This may be understood in terms of series of surfaces singularities: All surface singularities in a series
come from the same curve singularity, the difference being only how non minimal
the embedded resolution is. Our results then imply that the generic member of such
a series has “the same amount of moduli” as the curve defining the series. They also
show that the moduli problem of irreducible plane curve singularities is contained
in the corresponding problem for rational surface singularities.
Central in our approach is what we would like to call equinumerical deformation
of complete ideals. The sandwiched singularity lies on the blowup of the plane in a
complete ideal, and the equinumerical deformation of complete ideals corresponds
exactly to deformations of the surface which induce equisingular deformation of the
singularities on the surface. It seems also that the connection between equisingular
plane curves and deformation of complete ideals has not been noted earlier. This
description of equisingularity of a deformation is interesting and particular useful
for our purpose.
The sections are summarized as follows. Some preliminaries are given in Section
3.2. We start Section 3.3 on equisingular deformations by reviewing the construction
of sandwiched singularities, and in subsection 3.3.3 we describe the different deformation functors which are involved. The observations in 3.3.3 are central in this
paper. In 3.3.4 we study the tangent spaces of the deformation functors introduced
in 3.3.3, and the relationship between them.
3.2. PRELIMINARIES
59
In Section 3.4 we consider the generic case in the sense described above. The main
result is that for the case when the defining plane curve singularity is irreducible,
there is a one to one correspondence between isomorphism classes of plane curve
singularities with a given semigroup and normal surface singularities with a given
dualgraph. In order to prove this we have to consider the possible dual graphs for
these singularities and consider the groups of automorphisms of these graphs. This
is done in 3.4.1. In 3.4.3 we include the considerations on the tangent spaces in the
generic case.
I would like to thank my supervisor Jan Arthur Christophersen for his continuous
support and also Olav Arnfinn Laudal for his patient explanation of different aspects
of deformation theory.
3.2
Preliminaries
The field C of complex numbers is fixed as the ground field throughout the rest of
this article.
3.2.1
Deformations
We are going to use the theory of deformation functors, [Sch68], so let C be the
category of local Artin C-algebras, and let C[] = C[t]/(t2 ) be the ring of dual
numbers. Recall that a deformation of a C-scheme Y over A ∈ C is a cartesian
diagram
Y
−−−−→
Y
y
y
Spec C −−−−→ Spec A
where Y → Spec A is flat. We will also speak of deformation classes where the
the following equivalence is understood. Two deformations are equivalent if the
corresponding schemes are isomorphic over A by an isomorphism which induces the
identity when pulled back to C. We denote by Def Y : C → Sets the functor of all
deformation classes.
3.2.2
Rational surface singularities
Recall that a normal surface singularity X = Spec B is said to be rational if for any
e → X, H 1 (X,
e O e ) = 0. The exceptional set E ⊂ X
e is a union of
resolution π : X
X
1
irreducible components Ei ' P . There is a fundamental cycle supported on E which
P
may be constructed as the unique smallest positive divisor Z =
mi Ei satisfying
Z ·Ei ≤ 0 for all irreducible components Ei . The embedding dimension e of X equals
−Z 2 + 1 and the multiplicity e − 1 = −Z 2 .
60
CHAPTER 3. EQUISINGULAR DEFORMATIONS
Given a normal surface singularity we will often consider the minimal good resolution. A good resolution has the property that all exceptional curves intersects
transversally and when they intersect, there are only two intersecting in one point.
For rational surface singularities the minimal resolution is always the minimal good
resolution.
3.2.3
Dual graphs for normal surface singularities
It is common to describe the configuration of the exceptional curves in the minimal
good resolution of a normal surface singularity, by a graph. This is called the
dualgraph of resolution. This is an invariant of the singularity and accordingly one
sometimes speaks of the dualgraph or only the graph of the singularity. Before we
recall the definition, we fix some notations on graphs.
A weighted graph Γ is an ordered triple (v, e, w) such that e is a subset of
unordered pair of elements in v and w is a map w : v → Z. We assume that v and e
are finite sets and we refer to v as the vertices and to e as the edges of Γ. The map
w gives the weights.
If Γ is a graph we write v (Γ) for the vertices, e (Γ) for the edges and w (Γ) :
v (Γ) → Z for the weights. We further write xy ∈ e (Γ) for an edge with x, y ∈ v (Γ) .
Two graphs Γ and Γ0 are isomorphic if there is a bijection φ : v (Γ) → v (Γ0 ) such
that φ(x)φ(y) ∈ e (Γ0 ) if and only if xy ∈ e (Γ) .
A subgraph Γ0 ⊂ Γ is an inclusion v (Γ) ⊂ v (Γ) such that xy ∈ e (Γ0 ) if and only
if xy ∈ e (Γ) and such that w (Γ0 ) = w (Γ)|v(Γ0 ) . A subgraph γ ⊂ Γ is called a path
in Γ if v (γ) = {x0 , . . . , xl } and e (γ) = {x0 x1 , x1 x2 , . . . , xl−1 xl } .
e → X be a resolution.
Now let X = Spec B be a surface singularity and let π : X
Let E = ∪m
i=1 Ei be the decomposition of the exceptional set into its irreducible
components. We define a graph Γ = Γ(π) as follows: Set
v(Γ) = {E1 , . . . , Em }
and define e(Γ) by the condition that
Ei Ej ∈ e(Γ)
if and only if i 6= j and Ei ∩ Ej 6= ∅, Finally define the weights by
w(Γ)(Ei ) = Ei2 .
Definition 3.2.1. The dualgraph of X is Γ = Γ(X) = Γ(π), where π is the minimal
good resolution of X.
3.3. EQUISINGULAR DEFORMATIONS
3.2.4
61
Plane curves
By a plane curve singularity we will mean a scheme
C = Spec C[[x, y]]/(f ).
To an irreducible plane curve singularity there corresponds a semigroup S = S(C) :
Let
A = C[[x, y]]/(f ) ⊂ A = C[[t]]
where A is the normalization of A. On the quotient-field of A, K, there is a canonical
valuation
v : K \ {0} → Z.
The semigroup S is now the subsemigroup v(A \ {0}) of Z.
By a good embedded resolution of C we mean an embedded resolution such that
the reduced total transform of C is a normal crossing divisor. In particular there
are at maximum two irreducible components intersecting in a point.
3.3
Equisingular deformations of sandwiched singularities
A subclass of the rational surface singularities are the sandwiched singularities.
Definition 3.3.1. A sandwiched singularity is a normal surface singularity which
lie on a smooth projective surface V which admit a birational morphism to a smooth
projective surface S.
Cyclic quotient singularities and more generally rational surface singularities
with reduced fundamental cycle are sandwiched singularities, see [Spi90a], [dJvS95].
As remarked by Spivakovsky, see [Spi90a], there is also a general method of constructing sandwiched singularities from plane curve singularities as follows.
3.3.1
Construction of sandwiched singularities
Let
C = Spec C[[x, y]]/(f )
be a plane curve singularity, and let
Sn −−−−→ Sn−1 −−−−→ · · · −−−−→
x
x
S0 = Spec C[[x, y]]
x
Cn −−−−→ Cn−1 −−−−→ · · · −−−−→ C0
=C
(3.3.1)
62
CHAPTER 3. EQUISINGULAR DEFORMATIONS
be an embedded (possibly non-minimal) good resolution of C, obtained by blowing
up closed points, and where Ci is the strict transform of C in Si . Given 3.3.1, there
is a canonical sequence of blowups
π
πn−1
Z = Zn −−−n−→ Zn−1 −−−−→ · · · −−−−→ Z0 = Spec C[x, y]
(3.3.2)
which induces the first row of (3.3.1) by the base change
Spec C[[x, y]] → Spec C[x, y].
Let π be the composition of the maps in (3.3.2), and let
E = π −1 (0) = ∪m
i=1 Ei
be the decomposition of the exceptional set into its irreducible components. Assume
Er , . . . , Em are those with Ei2 = −1. Now the intersection matrix of E1 , . . . , Er−1
is negative definite, so we may blow these curves down to obtain a surface Y. This
surface is in fact algebraic, see [Spi90a].
e where
Let C ∗ denote the total transform of C 0 in Z. Then C ∗ = D + C,
X
D=
mi Ei .
Now let q = H 0 (Z, OZ (−D)) = H 0 (π∗ OZ (−D)) ⊂ C[x, y].
We may assume that that C is defined by a polynomial f. Thus we have C 0 =
e ⊂ Z to be the strict transform of C 0 . Put X
e = Z \ C.
e
V (f ) ⊂ Z0 and we define C
e is the minimal good resolution of some X ⊂ Y.
Then X
Definition 3.3.2. Let C be a plane curve singularity. Let k be the number of
branches of C, and let a ∈ Nk . Let Z = Zn be as above such that Z is obtained from
the minimal resolution of C after ai extra blowups at each branch.
We put Z(C,a) = Z and let Y(C,a) = Y be the corresponding contraction. Let
X be the open subscheme of Y obtained as above. We define X(C,a) = X, and
q(C,a) = q where q is obtained as above.
Proposition 3.3.3. Let Z = Z(C,a) , Y = Y(C,a) and X = X(C,a) be as above.
Then
i) Y has a unique singular point,
ii) X = X(C,a) is an affine open subscheme of Y containing the singularity
iii) up to analytic equivalence the singularity of Y only depends on the
isomorphism class of C and on the integer vector a
3.3. EQUISINGULAR DEFORMATIONS
63
iv) up to analytic equivalence all sandwiched singularities are obtained
as the singularity of Y(C,a) for some C and a
v) Y is the blowup of Spec C[x, y] in q(C,a) .
Proof. See [Spi90a] and Proposition 4.3.3.
Remark 3.3.4. Note that the ai used here are the same as l(i) − M (i) in the notation
of [dJvS95].
Remark 3.3.5. Note that X(C,a) is an affine scheme of finite type over C, and thus
an algebraic representative of a normal surface singularity. We will however speak
of X(C,a) as a surface singularity.
We give an example of a sandwiched singularity.
Example 3.3.6. Let
f = x13 + y 5 ∈ R = C[x, y],
C = V (f ) ⊂ A2 , a = 2. Then
π −1 (0) = ∪8i=1 Ei .
The dualgraph Γ(π) is given in figure 3.1.
Figure 3.1: The graph Γ(π).
The configuration of exceptional curves has intersection matrix
−2
1
0
0
0
0
0
0
1 −3
0
1
0
0
0
0
0
0 −3
0
1
0
0
0
0
1
0 −3
0
1
0
0
0
0
1
0 −2
1
0
0
0
0
0
1
1 −2
1
0
0
0
0
0
0
1 −2
1
0
0
0
0
0
0
1 −1
64
CHAPTER 3. EQUISINGULAR DEFORMATIONS
and the negative of the inverse
1 1
1 2
1 2
2 4
3 6
5 10
5 10
5 10
intersection matrix is
1
2
3
5
8
13
13
13
2
4
5
10
15
25
25
25
3
6
8
15
24
39
39
39
5
10
13
25
39
65
65
65
5
10
13
25
39
65
66
66
5
10
13
25
39
65
66
67
.
From this matrix one may read off the multiplicity sequence for curves in Spec R such
that π : Z → Spec R gives an embedded resolution, see [Lip69], and in particular we
get that
D = 5E1 + 10E2 + 13E3 + 25E4 + 39E5 + 65E6 + 66E7 + 67E8 .
The simple complete ideal q = H 0 (Spec R, π∗ OZ (−D)) is
y 6 , xy 5 , x3 y 4 , x6 y 3 , x9 y 2 , x11 y, x14 , x13 + y 5 ,
see Section 3.4.2. Embedding Y into PnA2 = Proj (R [T1 , . . . , Tn ]) by qOZ gives n = 7
and one finds that Y is given by an ideal generated by 49 elements in R [T1 , . . . , Tn ].
Calculating the fundamental cycle one finds that the embedding dimension of X is
6, so we do not get a minimal embedding this way.
3.3.2
Equisingular deformations
Oscar Zariski started the study of equisingularity. For plane curve singularities,
equisingularity is well understood. In general, however, it is not easy to give the right
definition. In this article we will only study plane curve singularities and rational
surface singularities, and here Wahls definitions of equisingular deformations seems
to be correct, see [Wah76] and [Wah74]. For the convenience of the reader we now
recall these definitions.
Plane curves
Let C = Spec C[[x, y]]/(f ) be a plane curve singularity, and let
S = Sn −−−−→ Sn−1 −−−−→ · · · −−−−→ S0 = Spec C[[x, y]]
x
x
x
Cn
−−−−→ Cn−1 −−−−→ · · · −−−−→
C0 = C
(3.3.3)
3.3. EQUISINGULAR DEFORMATIONS
65
be a good embedded resolution of C, obtained by blowing up points. Let sij :
Spec C → Si define the points which are blown up. Let also tj : Spec C → S define
the ordinary double points of the reduced total transform of C. The reduced total
transform of C is E + Cn where E is the reduced exceptional divisor. We define
a deformation of C over A ∈ C with simultaneous embedded resolution, to be a
deformation C of C, a commutative diagram
S = S n −−−−→ S n−1 −−−−→ · · · −−−−→
x
x
S0
x
(3.3.4)
S = Sn −−−−→ Sn−1 −−−−→ · · · −−−−→ S0
and A-sections sij : Spec A → S i inducing sij , A-sections tj : Spec A → S inducing
tj such that
1. (3.3.4), the sections sij and tj , C i (the strict transform of C in S i ) and E (the
unique Cartier divisor in S n inducing E) give a deformation of the situation
given by 3.3.3, the sections sij and tj , Ci and E as above, in particular, such
that S i+1 is the blow up of S i in the sections sij
2. all the obvious diagrams commute and all sections are compatible
3. all A-sections are normally flat (i.e. they are defined by an ideal m such that
mn is A-flat for all n > 0.)
Two such deformations,
C, S i , sij , tj
and
n
o
C, S i , sij , tj
are said to be isomorphic if there is an isomorphism (of deformations) of S 0 and S 0
such that it
1. sends C to C
2. induces an isomorphism of (3.3.4) and the corresponding diagram for S 0
3. the sections are compatible with the isomorphisms.
The functor of equisingular deformations of C is defined as follows. Let for
A ∈ C,
(
Set of isomorphism clases of deformations C of C
ESC (A) =
with simulatanous embedded resolution
This definition coincides (up to isomorphism of functors) with the definition
given in [Wah74], see [Wah74, 2.7, 2.12, 3.2, 7.3]. In particular is ESC independent
of the choice of embedded resolution, 3.3.3.
66
CHAPTER 3. EQUISINGULAR DEFORMATIONS
The functor of equisingular deformation of a plane curve possesses the following
property:
Theorem 3.3.7 (Wahl, [Wah74, 7.4]). ESC ⊂ Def C is smooth subfunctor and
has a hull.
It is also possible to give another description of the functor of equisingular deformation, see 3.3.15, using complete ideals. This will be useful.
Normal surface singularities
For normal surface singularities the concept of equisingular deformations is more
difficult than for plane curves. Wahl, [Wah76], tries to define equisingular deformation of normal surface singularities trough special deformations of the minimal good
resolution. In the case of rational surface singularities the definition reduces to the
following simple one.
e be its minimal
Let X = Spec B be a rational surface singularity and let X
good resolution. Let E = ∪Ei be the exceptional set. The functor of equisingular
deformations of X, is for A ∈ C defined by
(
e of
Set of isomorphism clases of deformations X
ESX (A) =
e to which the Ei lift (locally trivial)
X
e they lift uniquely.
Remark 3.3.8. If the Ei lift to X,
This is also (for rational surface singularities) the functor of simultaneous resolutions along normally flat sections, see [Wah76, Th. 5.16]. It has the following
properties.
Theorem 3.3.9 (Wahl, [Wah76, 4.6]). Let X be a rational surface singularity
e be the minimal good resolution with exceptional set E. Then ESX ⊂ Def X
and let X
e θ(log E)) ⊂
is a smooth subfunctor and has a hull. Moreover ESX (C[]) = H 1 (X,
1
e θ) where θ(log E) is the dual of the sheaf of one forms with logarithmic poles
H (X,
along the exceptional set.
3.3.3
The deformation functors
Let
C = Spec C[[x, y]]/(f )
be a plane curve singularity. We assume that f is a polynomial and consider f also
as an element of R = C[x, y]. Choose a > 0 and let q = q(C,a) . Also let C 0 = V (f ) ⊂
Spec R. We will define several deformation functors, so again let C be the category of
local Artin rings. The first functor to be defined is closely related to ESC described
3.3. EQUISINGULAR DEFORMATIONS
67
above. It corresponds to deformations of the target of the embedding disregarding
the curve. When comparing with ESC note also that the schemes involved in the
following are of finite type.
Let
Sn −−−−→ Sn−1 −−−−→ · · · −−−−→ S0 = Spec C[[x, y]]
(3.3.5)
be obtained from an embedded resolution of C. We fix this once and for all. Let
π
πn−1
Z = Zn −−−n−→ Zn−1 −−−−→ · · · −−−−→ Z0 = Spec R
(3.3.6)
be the canonical sequence of blowups which induces (3.3.5) via the base change
Spec C[[x, y]] → Spec C[x, y].
Assume that
s0 : Spec C → Spec R
define the origin (0, 0) in Spec R and let
sij : Spec C → Zi
define the other points which are blown up in (3.3.6). Choose A ∈ C. Let
s0 : Spec A → Spec R ⊗C A
be a normally flat A-section lifting s0 . Then this section is defined by
m ⊂ R ⊗C A
such that mi is A-flat for all i. Blow up Spec R ⊗C A in m;
M
Z 1 = Proj
mi .
i≥0
Then Z 1 is a flat deformation of Z1 . We may now speak about normally flat Asections
s1j : Spec A → Z 1 ,
lifting the s1j and compatible with s0 , that is, the composition with the blow down
map to Z 0 is s0 . Now blow up these sections to obtain Z 2 . Continuing to choose
liftings of sij and blow up we get a deformation of 3.3.6:
Z n −−−−→ Z n−1 −−−−→ · · · −−−−→
x
x
Z 1 −−−−→ Z 0 = Spec R ⊗k A
x
x
Zn −−−−→ Zn−1 −−−−→ · · · −−−−→ Z1 −−−−→
Z0 = Spec R.
(3.3.7)
68
CHAPTER 3. EQUISINGULAR DEFORMATIONS
We will say that two such deformations,
n
o
Z i , sij , s0
and
Z i , sij , s0
are isomorphic if there are isomorphisms (of deformations) φi : Z i → Z i such that
we have commutative diagrams
Z i −−−−→ Z i−1
φi−1 y
φi y
Z i −−−−→ Z i−1
and such that
φi ◦ sij = sij .
We now define the deformation functor G by letting
(
Set of isomorphism clases of deformations
G(A) =
including sections as above.
There is an alternative description of this functor. We define ESY for A ∈ C, by
(
Set of isomorphism classes of deformations Z of Z
ESY (A) =
to which the Ei lift (locally trivial)
Remark 3.3.10. If Ei lift to a deformation Z they lift uniquely.
Proposition 3.3.11.
∼
G−
→ ESY
Proof. See also [Wah74, Lemma 4.7]. The sections guarantees that the Ei lift so
there is clearly a map G → ESY . Now let A ∈ C and Z be a lifting of Z to Spec A
P
to which the Ei lifts to E i ⊂ Z. Let m = (x, y) ⊂ R. There is a cycle D =
ri Ei ,
n
0
on Z such that mOZ = OZ (−D) and m = H (OZ (−nD)), see [Lip69, 7.3, §18].
P
Further H 1 (OZ (−nD)) = 0 for all n by [Lip69, §18, 12.1]. Let D =
ri Ei and
n
0
0
put m = H (OZ (−D)). Then m = H (OZ (−nD)). By [Wah76, 0.4.4 and the proof
of 5.13] mn is A-flat for all n ≥ 0. So, m defines a normally flat A-section, s0 :
Spec A → Spec R ⊗C A. Blow up s0 to get Z 1 . One proves easily that mOZ = O(−D)
and in particular is mOZ invertible, so Z dominates Z 1 . Now we may continue in an
obvious manner until we reach the following situation
α
Z −−−−→
x
Zn
x
Z
Z.
3.3. EQUISINGULAR DEFORMATIONS
69
But since α lifts the identity, it must be an isomorphism. Thus we have produced
an element of G(A) which maps to the class of Z, so the map G(A) → ESY (A) is
surjective. To prove injectivity, assume that
φ:Z
(1)
→Z
(2)
is an isomorphism of deformations. If the Ei lift, they lift uniquely, so that φ takes
(1)
(2)
the lifting of the −1-curves in Z to the liftings of the −1-curves in Z . Thus the
isomorphism φ “blows down” to isomorphisms
(1)
φi : Z i
(2)
→ Zi
and gives an isomorphism of the whole diagrams in which Z
it is also clear that
(1)
(2)
φi ◦ sij = sij ,
(1)
and Z
(1)
sits. Now
so we have proved that the map is injective.
To clarify the relationship to complete ideals, we define a third deformation
functor F. Let D be such that qOZ = OZ (−D), see [Lip69, §18] If the Ei lift, then so
does D and its lifting is D = Σri E i , where D = Σri Ei . So for A ∈ C we may define
(
Set of isomorphism clases of flat liftings q ⊂ R ⊗C A of q
F (A) =
such that q = H 0 (OZ (−D)) where Z ∈ S(A).
Remark 3.3.12. This functor could be called the equinumerical deformation functor
of complete ideals. As in [Spi90b] one may define numerical invariants of complete
ideals. Then deformations as above are exactly the deformations which “keep these
invariants fixed.”
We will need the following lemma a couple of times.
(1)
(2)
Lemma 3.3.13. Assume Z
and Z
are liftings of Z to Spec A, A ∈ C, such
that the corresponding deformation classes are in ESY (A) and assume we have a
diagram of deformations
(1)
(2)
Z
Z
y
y
Y
over Spec A, where Y
deformations
(1)
and Y
(2)
(1)
(2)
are deformations of Y. Then there exist a map of
Z
making the diagram commutative.
−−−−→ Y
(1)
→Z
(2)
70
CHAPTER 3. EQUISINGULAR DEFORMATIONS
Proof. The proof uses the vanishing result HE1 (θ(log E)) = 0, [Wah75, Th. C], and
is analogous to [Wah76, Prop. 1.12].
We claim:
Proposition 3.3.14.
∼
→F
ESY −
Proof. There is a morphism ESY → F sending Z to q which is surjective by definition
if we know that q is a flat lifting. But H 1 (Z, OZ (−D)) = 0. By [Wah76, 0.4.2] then
also H 1 (Z, OZ (−D)) = 0. From [Wah76, 0.4.3] it follows that H 0 (OZ (−D)) is A-flat.
(In fact qn = H 0 (OZ (−nD)) is A-flat for all n > 0.)
Next we must show that the map is injective. Let Z 1 and Z 2 be liftings giving
the same q. Let Y be the blow up of Spec R ⊗C A in q. Then Y is a deformation of
Y and we have
Z i ←−−−− Z
y
y
Y ←−−−− Y
for i = 1, 2, since Z i dominates Y . Thus both Z 1 and Z 2 blow down to Y . From
3.3.13 it follows that Z 1 and Z 2 are in the same deformation class.
Assume we have a deformation C of C and that this has a simultaneous embedded
resolution (with sections):
Sn −−−−→ Sn−1 −−−−→ · · · −−−−→
y
y
S0
y
(3.3.8)
S n −−−−→ S n−1 −−−−→ · · · −−−−→ S 0
Let s0 be the first section. This is defined by an ideal
m = (x − m1 , y − m2 ) ⊂ C[[x, y]] ⊗C A
where mi are in the maximal ideal of A. Clearly we may lift this to give a section
Spec A → Z 0 = Spec R ⊗C A.
Blowing up this section and continuing, we get a corresponding (algebraic) simultaneous resolution of C 0 . By forgetting we get an element of ESY (A). In fact, in this
way we define a transformation of functors
ρ : ESC → ESY .
This is a smooth map of deformation functors, but before we prove this, we connect equinumerical deformation of complete ideals to equisingular deformations of
3.3. EQUISINGULAR DEFORMATIONS
71
plane curve singularities. Recall that we are assuming that the defining curve
C = Spec C[[x, y]]/(f ) is defined by a polynomial f so that we may consider C 0 =
Spec R/(f ). Now consider a lifting C 0 = V (f ) ⊂ Spec A⊗C R of C 0 . Then, by pulling
back, we get a deformation C = V (f ) ⊂ Spec A[[x, y]] of C.
0
Proposition 3.3.15. In the notation above, C ∈ ESC (A) if and only if there to C
corresponds a q ∈ F (A) such that f ∈ q. Moreover, the element in G(A) corresponding to q gives the simultaneous embedded resolution for C 0 .
Proof. Assume C ∈ ESC (A). As above, there is a corresponding embedded simulta0
neous resolution of C :
Z = Z n −−−−→ Z n−1 −−−−→ · · · −−−−→
x
x
Cn
Z0
x
−−−−→ C n−1 −−−−→ · · · −−−−→ C 0 = C 0
∗
Let C be the total transform of C 0 . From [Wah74, Prop. 1.6] one easily shows
∗
that C = C n + D where D is such that q = H 0 (OZ (−D)) is in F (A). Thus
∗
∗
OZ (−C ) ⊂ OZ (−D). Since, π∗ OZ (−C ) = (f ), f ∈ q. Conversely if f ∈ q then
by Proposition 3.3.14 and 3.3.11 there corresponds to q deformation as in (3.3.7).
We only need to show that this is a simultaneous embedded resolution of C 0 . The
∗
total transform of C 0 will be of the form C = C n + D where again D is such that
q = H 0 (OZ (−D)) and C n is a lifting of Cn in Z = Z n . Blowing down we get a lifting
C i of Ci at each step and C 0 have to be C 0 . Moreover, C i has to be compatible with
the sections sij , as is clear from the proof of Proposition 3.3.11. Lastly from [Wah74,
1.9] the last sections (the tj ) are uniquely determined by the lifting. The last part
of the proposition is now clear.
Remark 3.3.16. The proposition shows how equisingularity of a plane curve may be
described in terms of equinumerical deformations of complete ideals.
Theorem 3.3.17. The map ρ is smooth.
Proof. See also [Wah74, Prop. 4.9, Th. 4.2]. Let A2 → A1 be a small surjection
in C. Assume ρ(A1 )(C 1 ) = Z 1 . Assume Z 2 ∈ ESY (A2 ) and maps to Z 1 . We must
prove that there is C 2 ∈ ESC (A2 ), lifting C 1 , such that ρ(A2 )(C 2 ) = Z 2 . But the
∗
total transform C 1 ⊂ Z 1 may be lifted locally trivially to a divisor D ⊂ Z 2 . By the
identification of ESY with the functor G, there is a map π : Z 2 → Spec R ⊗C A2 .
Then π ∗ OZ 2 (−D) gives an ideal a which one may show is a principal ideal which
gives a lifting C 2 of C 1 . Now Proposition 3.3.15 (and its proof) shows that a ⊂ q
and that C 2 is in ESC (A2 ), and that C 2 maps to Z 2 .
72
3.3.4
CHAPTER 3. EQUISINGULAR DEFORMATIONS
The tangent spaces
We first turn to the understanding of the kernel of the map ρ of the previous section.
Let K denote the kernel of ρ(C[]), and recall that
ESC (C[]) ⊂ TC1 = C[[x, y]]/(f,
∂f ∂f
,
),
∂x ∂y
see Theorem 3.3.7. We claim the following:
Theorem 3.3.18. K ⊂ TC1 is given by the image of q(C,a) in TC1 .
Proof. Let C ∈ ESC (C[]). Clearly, up to infinitesimal automorphism, we may assume that C comes from a deformation C 0 of C 0 . Assume that C 0 = V (f ) ⊂ Spec R
and that C 0 corresponds to a lifting f ∈ R ⊗C C[] of f. By proposition 3.3.15 we
get f ∈ q ⊂ R ⊗C C[] and from the proof of 3.3.15 we see that q is the lifting of
q induced by ρ(C[])(C). Now assume that this is the trivial deformation. By the
identification of ESY with F, q is the trivial lifting of q. So if f = f + g we must
have g ∈ q. This shows that K is contained in the image of q in TC1 .
On the other hand assume g ∈ q and consider the lifting f = f + g of f.
First from Proposition 3.3.15 this corresponds, by pulling back, to a C ∈ ESC (C[]).
Also by Proposition 3.3.15 we see that the corresponding simultaneous embedded
resolution is the trivial one, so C is mapped to the trivial deformation Z × Spec C[]
by ρ.
The tangent space for the functor ESY itself is described by a cohomology group.
Let again
π : Z → Spec R
and let E = π −1 (0) = ∪m
i=1 Ei be the decomposition of the exceptional set in irreducible components. Let θ = θZ be the tangent sheaf on Z. And let
θ(log E) ⊂ θ
be the subsheaf of derivations taking the ideal-sheaf of E into itself. This is also the
dual of the sheaf of one forms with logarithmic poles along E. Then from general
theory we know that there is an identification
ESY (C[]) = H 1 (Z, θ(log E)).
We now want to connect ESY to ESX of the singularity X ⊂ Y. We do this first on
tangent level. First let T1Y be the tangent space of Def Y , and let TX1 be the tangent
space of Def X . Now, Y blow down to an affine so all H 2 are zero, so in our situation
we have from the local global spectral sequence, see for instance [Lau79], the short
exact sequence
0 → H 1 (Y, θY ) → T1Y → TX1 → 0.
(3.3.9)
3.3. EQUISINGULAR DEFORMATIONS
73
Here H 1 (Y, θY ) is the subspace of TY corresponding to the locally trivial deformations of Y. We claim that there is a similar sequence involving the tangent spaces for
2
ESY and ESX . In fact, let E 0 = ∪r−1
i=1 Ei (again Er , . . . , En are those with Ei = −1)
then from Theorem 3.3.9
e θ(log E 0 )).
ESX (C[]) = H 1 (X,
e ⊂ Z is the minimal resolution of X. We have the following:
Here X
Proposition 3.3.19. There is an exact sequence
e θ(log E 0 )) → 0.
0 → H 1 (Y, θY ) → H 1 (Z, θ(log E)) → H 1 (X,
Proof. Recall that there are exact sequences
0 → θ(log E) → θZ →
m
M
NEi → 0
i=1
and
0 → θ(log E 0 ) → θZ →
r−1
M
NEi → 0
i=1
of sheaves on Z. See [Wah76, Prop. 2.2]. We have H 0 (NEi ) = 0 for all i, so
H 1 (Z, θ(log E 0 )) = ker H 1 (Z, θZ ) →
r−1
M
!
H 1 (Z, NEi )
i=1
and
H 1 (Z, θ(log E)) = ker H 1 (Z, θZ ) →
m
M
!
H 1 (Z, NEi ) .
i=1
By Riemann-Roch we have
χ(NEi ) = χ(OEi (Ei )) = Ei · Ei + 1.
Thus if r ≤ i ≤ m we have H 1 (Z, NEi ) = 0. This shows that H 1 (Z, θ(log E)) =
74
CHAPTER 3. EQUISINGULAR DEFORMATIONS
H 1 (Z, θ(log E 0 )). From the long exact sequence of (local) cohomology, we have:
0
y
0
y
α
e θ(log E 0 )) −−−−→ H 2 (Z, θ(log E 0 )) −−−−→ 0
H 1 (Z, θ(log E 0 )) −−−−→ H 1 (X,
e
C
y
y
y
H 1 (Z, θ)
y
−−−−→
β
e θ)
H 1 (X,
y
−−−−→
H 2e (Z, θ)
C
y
−−−−→ 0
⊕H 1 (Z, NEi )
y
−−−−→
γ
e NE )
⊕H 1 (X,
i
y
−−−−→
⊕H 2e (Z, NEi )
−−−−→ 0
0
C
0
We claim that all the modules on the right are zero. For example to show that
H 2e (Z, θ) = 0 we use that
C
HC2e (Z, θ) = lim Ext2 (OnCe , θ).
Taking Hom(−, θ) of
e → OZ → O e → 0
0 → OZ (−nC)
nC
we get
ρ
e θ) → Ext2 (O e , θ) → 0
· · · → Ext1 (OZ , θ) −
→ Ext1 (OZ (−nC),
nC
since
Ext2 (OZ , θ) = H 2 (Z, θ) = 0.
Considering the exact sequence
e → O e (nC)
e →0
0 → OZ → OZ (nC)
nC
we identify the first map in
e −−−−→ H 1 (Z, θ ⊗ O e (nC))
e −−−−→ 0
H 1 (Z, θ) −−−−→ H 1 (Z, θ ⊗ O(nC))
nC
e is C,
e the normalization of C and is affine,
with ρ. But the support of θ ⊗ OnCe (nC)
1
e
so H (Z, θ ⊗ OnCe (nC)) = 0. It follows that Ext2 (OnCe , θ) = 0.
Now consider the map γ. Since NEi has support on Ei and the sum is taken over
e it follows that γ is an isomorphism. It follows that ker α ' ker β, we show
Ei ⊂ X,
that ker β ' H 1 (Y, θ).
3.3. EQUISINGULAR DEFORMATIONS
75
e From the Leray spectral sequence we get
Let π1 be the restriction of π to X.
0 → H 1 (Y, (π1 )∗ θ) → H 1 (Z, θ) → H 0 (Y, R1 (π1 )∗ θ) → 0.
[BW74, prop 1.2] states that (π1 )∗ θZ = θY , so we only need to show that
e θ).
H 0 (Y, R1 (π1 )∗ θZ ) = H 1 (X,
But R1 (π1 )∗ has support on the singular point so
H 0 (Y, R1 (π1 )∗ θZ ) = H 0 (X, R1 (π1 )∗ θZ ).
e θ).
From [Har77, Prop. III.8.2] this equals to H 1 (X,
Now we have the following diagram
0 −−−−→ H 1 (Y, θY ) −−−−→
x
T1Y
x
−−−−→
TX1
x
−−−−→ 0
e θ(log E 0 )) −−−−→ 0.
0 −−−−→ H 1 (Y, θY ) −−−−→ H 1 (Z, θ(log E)) −−−−→ H 1 (X,
From Theorem 3.3.9 it follows that all vertical maps are injective.
Remark 3.3.20. From Lemma 3.3.13 it follows that ESY is a subfunctor of Def Y .
Given a deformation Y of Y, we may always restrict to get a deformation X of X. It
is clear from the definition of ESY and ESX that if Y corresponds to a deformation
for ESY , then X corresponds to a deformation for ESX . The converse is also true,
see Proposition 4.5.28. Thus ESY is is the functor of deformations of Y inducing
equisingular deformations on the singularity X ⊂ Y.
3.3.5
The map ESC → ESX
It is now easy to see that there is a smooth map
ESC → ESX .
Proposition 3.3.21. The functor ESY is smooth.
Proof. It clear that the obstructions for smoothness sits in H 2 (Z, θ(log E)), see
[Wah76, Prop. 2.5iii)]. But H 2 (Z, θ(log E)) = 0.
The “restriction” map ESY → ESX is smooth since from Proposition 3.3.19 the
map
ESY (C[]) → ESX (C[])
is surjective, see [Buc81]. So, we have:
76
CHAPTER 3. EQUISINGULAR DEFORMATIONS
Theorem 3.3.22. There is a smooth map
ESC → ESX
of deformation functors.
We should now give some examples.
Example 3.3.23. Let
C = Spec C[[x, y]]/(x3 + y 3 )
be three lines intersecting in a point. This has
ESC (C[]) = 0.
Thus for any a = (a1 , a2 , a3 ) ∈ N3 we have from 3.3.22 that X = X(C,a) is equisingular rigid. Indeed X(C,a) has the dualgraph
and is known to be taut, see [Lau73].
Example 3.3.24. Let
C = Spec C[[x, y]]/(x4 + y 4 )
be four lines intersecting in a point. Letting a = (1, 1, 1, 1) we get a singularity
X ⊂ Y with the following dualgraph:
This is a cyclic quotient singularity and is known to be equisingular rigid, that is
e θ(log E 0 )) = 0.
dimC H 1 (X,
However, one finds (see Section 3.4.2) that the corresponding complete ideal q(C,a)
is
x4 + y 4 , x5 , x4 y, x3 y 2 , x2 y 3 , xy 4 , y 5 .
3.3. EQUISINGULAR DEFORMATIONS
77
Also x2 y 2 is a basis for
ESC (C[]) ⊂ TC1 = C[[x, y]]/(x3 , y 3 ).
This is not in the image of q so from 3.3.18,
ESY (C[]) = H 1 (Z, θ(log E)) = 1.
This shows that (proposition 3.3.19)
dimC H 1 (Y, θ) = 1.
This could be understood as a cross ratio between four exceptional curves in Y. Now,
if we let a = (2, 2, 2, 2), we get a singularity with the following dualgraph:
This is known to have
e θ(log E 0 )) = 1,
dimC H 1 (X,
see [Lau73]. The corresponding complete ideal q(C,a) is
x4 + y 4 , x6 , x5 y, x4 y 2 , x3 y 3 , x2 y 4 , xy 5 , y 6 .
Thus we see that still, ESY (C[]) has dimension 1. So the moduli is now “swallowed
up” by the singularity.
Remark 3.3.25. We have seen how the kernel of ESC → ESY is nicely related to
the curve and the complete ideal. It would be nice to have a similar description
for the kernel of ESC → ESX . This however seems to be difficult. Assume Y is
a deformation of Y over Spec C[]. This induces a deformation of X of X. Now
there may be an infinitesimal automorphism of X which allow us to trivialize X.
Since Y blow down to Spec C[x, y] ⊗C C[], also X does. However, the infinitesimal
automorphism that trivializes X might not blow down. That is, it might not be
possible to trivialize X over Spec C[x, y] ⊗C C[]. Thus to understand the kernel
of ESC → ESX one must understand the infinitesimal automorphisms of X very
well. In general this is difficult, but the results of the next section show that if the
defining curve singularity is irreducible and a is large the smooth map of 3.3.22 is
an isomorphism on tangent spaces.
78
CHAPTER 3. EQUISINGULAR DEFORMATIONS
3.4
Results in the case of large a.
In this section we will assume that the defining curve C is irreducible. Under this
assumption we show that there is an a∗ , which depends only on the topological
type of C, such that if the a in the definition of X = X(C,a) is taken to be larger
than this a∗ , the moduli of the plane curve singularity C coincide with the moduli
of the normal surface singularity X. To do this we need some notation and results
concerning graphs of sandwiched singularities and complete ideals.
3.4.1
Graphs of sandwiched singularities
The possible dual graphs for sandwiched singularities were classified by Spivakovsky,
[Spi90a]. We will only consider the case when C is irreducible. Then the possible
graphs may be well known, but to fix notation we give a review, following [Spi90b].
Let again C be an irreducible plane curve singularity and let a ∈ N be given. As in
Section 3.3.1 define
π : Z = Z(C,a) → Spec C[x, y].
We denote by Γ∗ = Γ(C,a) the dual graph of this (non-minimal) resolution of “the
smooth singularity.” It is clear that the dual graph of Γ = Γ(X) of X = X(C,a) is
contained in Γ∗ and that Γ∗ \ Γ consist of one vertex corresponding to the unique
−1-curve in Z.
Remark 3.4.1. Given Γ, then Γ∗ is not always uniquely determined, see [Spi90b,
2.4.8]. We will see, however, that if a is large enough, Γ∗ is uniquely determined by
Γ.
It is not difficult to see that Γ∗ must have a form as described in figure 3.2. Each
of the Γi for 1 ≤ i ≤ g are described in figure 3.3 and 3.4 depending on the parity of
mi . In both cases all vertices where the weight is not given, is taken to have weight
(i)
(i)
−2. Further the integers g, mi for 1 ≤ i ≤ g and a1 , . . . , ami are defined from the
graph. The Γg+1 is a line graph, where all vertices has weight −2 except the last
(g+1)
(to the right) which has has weight −1. We define mg+1 = 1 and a1
to be the
length of this minus one.
So given an irreducible plane curve singularity, we have a collection of integers
n o
(i)
aj
1≤j≤mi ,1≤i≤g+1
.
These integers (together with g and m1 , . . . , mg+1 ) are equivalent to Γ∗ = Γ(C,a) .
They are also equivalent with the semigroup of C together with the number a. In
3.4. RESULTS IN THE CASE OF LARGE A.
79
Figure 3.2: The shape of Γ∗ .
Figure 3.3: Γi for mi odd.
fact we have the following. Put for every 1 ≤ i ≤ g + 1,
1
(i)
βi0 := a1 +
(i)
a2 + · · · +
1
(i)
ami + 1
Write βi0 = npii , pi , ni ∈ N, and (pi , ni ) = 1. For 0 ≤ i ≤ g, set ei = Πgj=i+1 nj ,
eg = eg+1 = n0 = β00 = 1. Now define
β 0 = e0
β i = βi0 − 1 ei−1 + β i−1 ni−1
(3.4.1)
for 1 ≤ i ≤ g + 1.
(3.4.2)
The semigroup S(C) of S is then the subsemigroup of Z generated by β 0 , . . . , β g .
Example 3.4.2. Assume that C is a curve with semigroup S (C) generated by two
numbers p and q in N, (p, q) = 1, p < q. Also let a ∈ N be given. Then g = 1,
80
CHAPTER 3. EQUISINGULAR DEFORMATIONS
Figure 3.4: Γi for mi even.
m2 = 1, β 0 = p, β 1 = q and β 2 = a + pq. We also have
q
(1)
= a1 +
p
1
1
(1)
a2 + · · · +
(1)
am1 + 1
(2)
and a1 = a.
The following is an important observation.
Proposition 3.4.3. In the notation above, consider Γ ⊂ Γ∗ . Let
n o
(i)
aj
1≤j≤mi ,1≤i≤g+1
be the integers as defined from Γ∗ . If
(g)
(1)
a 6= a2 or mg 6= 2 and a 6= a1 or m1 6= 2
then there are no nontrivial automorphisms of Γ.
Proof. There are g stars in Γ. Only the leftmost and the rightmost stars have two
arms containing an end vertex of Γ. So, an automorphism of Γ must preserve
3.4. RESULTS IN THE CASE OF LARGE A.
81
or interchange these stars. If they should be interchanged, it is clear from the
(1)
(g+1)
description of Γ given above, that m1 = 2 and a2 = a1
= a.
If the leftmost and the rightmost stars are not interchanged, it is easy to see
from the description of Γ given above, that the only possibility for a non-trivial
automorphism, is to interchange the two arms of the rightmost star which contains
(g+1)
(g)
end vertices, and that this only may be done if mg = 2 and a = a1
= a2 .
3.4.2
Complete ideals
We review some results on complete ideals to be found in [Spi90b]. First some
notation. If B is any Noetherian domain, I is any ideal in B and S ⊂ B is a subset,
we set
multI S = max {n |S ⊂ I n } .
Set R=C[[x, y]]. Assume that
C = Spec C[[x, y]]/(f )
is an irreducible plane curve singularity, where f ∈ R.
Theorem 3.4.4 (Spivakovsky, [Spi90b, Cor. 8.4]). Keep the notation above,
and let a ∈ N be given. Define now the integers g, β 0 , . . . , β g+1 , and n0 , . . . , ng+1 as
in Section 3.4.1. Then there exist
Q0 , . . . , Qg+1 ∈ R
with the following properties
1. Q0 and Q1 are parameters for R.
2. Qg+1 defines C
3. q(C,a) in R is generated by the following set
X
g+1
γ
Qj j γj β j ≥ β g+1 .
j=0
j=0
g+1
Y
Now let a be the ideal generated by the set
X
g
g
Y
γ
Qj j γj β j ≥ β g+1
j=0
j=0
82
CHAPTER 3. EQUISINGULAR DEFORMATIONS
and set f = Qg+1 to be the defining element of C. Then we have q(C,a) = (f ) + a.
From [Spi90b] we also have that
g
j−1
g
X
Y X
γj
ni γj β j ≥ β g+1
multmR a = min
(3.4.3)
j=0
j=0
i=0
and since β g+1 = (a − 1)eg + β g ng and eg , β 0 , . . . , β g and n0 , . . . , ng do not depend
on a, we see that the multiplicity of a only depends on the semigroup of C and on
a. Further more the multiplicity of a increases with a, that is, we may increase the
multiplicity of a beyond any limit, be increasing a.
3.4.3
The tangent space of ESY when a is large
We have the following:
Theorem 3.4.5. Assume C is irreducible. Then there exist an a∗ which depends
only on the topological type of C, such that if a ≥ a∗ and Y = Y(C,a) , then
ESC (C[]) = ESY (C[]).
Proof. From, 3.3.18, we know that ESY (C[]) is the image of ESC (C[]) ⊂ TC1 in
∂f
C[x, y]/(f, ∂f
∂x , ∂y ) + q. Here f defines C and q = q(C,a) . We will prove that there
∗
exist an a such that a ≥ a∗ implies
q ⊂ (f,
∂f ∂f
,
).
∂x ∂y
∂f
Defining a as Section 3.4.2 we must prove a ⊂ (f, ∂f
∂x , ∂y ). But it is easy to see that
∂f
∂f ∂f
(x, y)µ ⊂ ( ∂f
∂x , ∂y ),, where µ = dimC C[[x, y]]/( ∂x , ∂y ). From (3.4.3) we may choose
a∗ such that a ≥ a∗ gives a ⊂ (x, y)µ . It is known that µ is an topological invariant
of C.
This gives us, at first sight, information on the moduli only of the surface Y. But
in fact, in the next section we will prove the following:
Theorem 3.4.6. Assume C is irreducible with semigroup S, and let Γ be the dualgraph of X(C,a) . Then there exist an a∗ , depending only on S, such that if a ≥ a∗ the
isomorphism classes of plane curve singularities with semigroup S are in one to one
correspondence with the isomorphism classes of (the complete local ring of ) normal
surface singularities with dualgraph Γ, by the construction in Section 3.3.1.
Now assume C is given and that a ≥ a∗ . Let Y = Y(C,a) . We claim that it
follows from the theorem that H 1 (Y, θ) = 0. In fact, assume H 1 (Y, θ) 6= 0. Since
3.4. RESULTS IN THE CASE OF LARGE A.
83
H 2 (Y, θ) = 0 there is a nontrivial deformation of Y. So in the analytic category there
is a nontrivial flat family Yt where Y0 = Y. There must be a Ys in this family which
is not isomorphic to Y0 , since if all fibers are isomorphic, the family is trivial by a
result of Fisher and Grauert, see [FG65]. But since the singularity on these are the
same, it follows from the preceding theorem that the defining curves are isomorphic.
But this is not possible unless Y0 and Ys are isomorphic. Thus from Proposition
3.3.19, we also have
Theorem 3.4.7. Assume C is irreducible. Then there exist an a∗ which depends
only on the topological type of C, such that if a ≥ a∗ and X = X(C,a) , then
ESC (C[]) = ESX (C[]).
3.4.4
The proof of Theorem 3.4.6
We introduce some notation. Let C be an irreducible plane curve singularity, and
let x ∈ X = X(C,a) be the singular point. Then we define
b X,x .
P(C,a) = Spec O
By pulling back via
Spec C[[x, y]] → Spec C[x, y],
leaving P(C,a) unchanged, we may assume that Z(C,a) , Y(C,a) and X(C,a) blow down
to Spec C[[x, y]]. In the following we will keep to this view, so let R = C[[x, y]]. Thus
defining a = a(C,a) as in Section 3.4.2 and letting a1 , . . . , an generate a, we find that
X(C,a) = Spec A, where
an
a1
,...,
A=R
f
f
and where f defines C. Thus P(C,a) = Spec Â. A main part is to prove the following
statement:
Proposition 3.4.8. Let S be the semigroup of an irreducible plane curve singularity.
Then there exist an a∗ such that if C and D are irreducible curve singularities with
semigroup S, a and b are greater than a∗ and P(C,a) and P(D,b) are isomorphic then
a = b and C and D are isomorphic.
Proof. Assume P(C,a) and P(D,b) are isomorphic. Thus:
^
P
(C,a)
ψ
/P
^
(D,b)
f
π1
P(C,a)
π0
φ
ρ1
/ P(D,b)
f
A2
ρ0
A2
84
CHAPTER 3. EQUISINGULAR DEFORMATIONS
Here, π1 and ρ1 are minimal resolutions. These are products of quadratic transformations. Let Γ be the dualgraph of P(C,a) . Then Γ is also the dualgraph of P(D,a) .
Since C and D have the same semigroup, Γ(C,1) = Γ(D,1) . But Γ(C,a) and Γ(D,b) must
have the same number of vertices. It follows from Section 3.4.1, that a = b and
that Γ(C,a) = Γ(D,b) . Let Γ∗ = Γ(C,a) . We may view ψ as giving an automorphism
of Γ ⊂ Γ∗ , but from Proposition 3.4.3, by choosing a = b large, this must be the
identity. This means (in the notation of Section 3.4.1) that the curves corresponding
^
(via the construction of Section 3.3.1) to the end vertices of Γ1 ⊂ Γ(C,a) in P
(C,a)
are mapped by ψ to the curves corresponding to the end vertices of Γ1 ⊂ Γ(D,b) in
^
P
(D,b) .
Let P(C,a) = Spec  as above, and let P(D,a) = Spec B̂, where
B=R
b1
bm
,...,
.
g
g
Here g ∈ R defines D and q(D,b) = (g) + b where b = (b1 , . . . , bm ) and multmR b may,
as in Section 3.4.2, be made arbitrary large by choosing b = a large. Let Φ denote the
isomorphism  → B̂ induced by φ. Consider now, in the notation of Section 3.4.1,
the subgraph Γ1 ⊂ Γ∗ . We may assume that the parameters x and y of R are such
chosen, that the strict transforms in Z(C,a) respectively intersect the exceptional set
in the irreducible components corresponding to the end vertices of Γ1 ⊂ Γ∗ and no
other components of the exceptional set. Thus the the strict transforms of the curves
in P(D,b) defined by the images Φ(x) and Φ(y) must respectively intersect each of
^
the curves corresponding to the end vertices of Γ1 ⊂ Γ(D,b) in P
(D,b) . From this, it
is easy to see that Φ(x) = u1 p1 and Φ(y) = u2 p2 where u1 and u2 areunits in B̂
and where p1 and p2 are regular parameters for R. Let c = bg1 , . . . , bgm . Then we
may write ui = u0i + vi (for i = 1, 2) where u0i are units in R and vi ∈ c. Choose f1 ∈
q(C,a−1) generic, that is, such that the strict transform of V (f1 ) in Z(C,a) intersects
the exceptional set only in the irreducible component which in turn intersects the
^
component with selfintersection −1. It follows that the strict transform in P
(D,a)
of the curve in P(D,b) defined by the image h = Φ(f1 ) intersect the irreducible
component of the exceptional set with the same property. It follows easily that
h = u3 g1 where g1 ∈ q(D,a−1) ⊂ R and u3 is an unit in B̂. Define an automorphism
θ : R → R by x 7→ u01 p1 , y 7→ u02 p2 , and consider θ(f1 ) − g1 = θ(f1 ) − h + h − g1 . By
definition of θ it is clear that θ(f1 ) − h ∈ c ⊂ B̂. Write u3 = u03 + v3 , where u03 ∈ R is
a unit and v3 ∈ c. Thus h = u03 g1 + v3 g1 . Redefining g1 we may assume h = g1 + c,
where c ∈ c. This gives h − g1 = c ∈ c. Hence θ(f1 ) − g1 ∈ c ∩ R. Since it is clear
that multmR c ∩ R ≥ multmR bi − multmR g, it follows by choosing a = b large, that
θ(f1 ) − g1 ∈ mµR , where µ is the Milnor number of f, f1 , g and g1 . (These have all the
same Milnor number since they have the same semigroup.) From Mathers Theorem
3.4. RESULTS IN THE CASE OF LARGE A.
85
it follows that R/(θ(f1 )) and R/(g1 ) are isomorphic. We also get f − f1 ∈ mµR and
g − g1 ∈ mµR , so that it follows that R/(f ) and R/(g) are isomorphic.
Remark 3.4.9. In the notation of the proof, we may take a∗ such that a ≥ a∗ gives
multmR b − multmR g = multmR a − multmR f ≥ µ,
and from Section 3.4.2 it follows that this depends only on the semigroup S. It also
follows that we may choose a∗ such that if a ≥ a∗ , the hypothesis of Proposition 3.4.3.
(i)
Clearly this only depends on the numbers {aj } and hence only on the semigroup
S.
In order to conclude the proof of Theorem 3.4.6 let S be a semigroup for a plane
irreducible curve. Let Γ be the graph obtained form Γ∗ = Γ(C,a) by deleting the
vertex with weight −1. From the proposition and the remark above, it remains now
only to show that any sandwiched singularity with dualgraph Γ may be obtained
from a irreducible plane curve singularity with semigroup S. This is however clear
from, [Spi90a, Prop. 1.11].
Example 3.4.10. In general the number a∗ which make the proof work, will be
large. If we take the semigroup S to be generated by 5 and 13 as in example 3.3.6,
the proof gives a∗ = 612. The actual bound is probably much smaller.
86
CHAPTER 3. EQUISINGULAR DEFORMATIONS
Chapter 4
Moduli for plane curve
singularities, complete ideals
and sandwiched surface
singularities
4.1
Introduction
Riemann classified the possible conformal structures on a compact Riemann surfaces.
Later the moduli problem was posed in many forms in different settings. In algebraic
geometry on tries to find a variety or scheme parameterizing all objects of a certain
fixed type. One my also pose such question in singularity theory. For normal surface
singularities, one may try to fix the dual graph of resolution, and try to classify all
normal surface singularities with this dualgraph. Laufer, [Lau73] classified all normal
surface singularities for which such classifying spaces consists of a countable number
of points.
I was asked by my supervisor, Jan Christophersen, to consider the moduli problem for sandwiched singularities. His motivation for proposing this problem comes
from a paper [Spi90a] of Mark Spivakovsky. In this paper the discrete classification
of sandwiched singularities is carried out. This classification shows an intimate correspondence with plane curve singularities as well as complete ideals and valuations.
These correspondences are also anticipated to give connections on the continuous
level. The purpose of this paper is to investigate this question.
We restrict ourselves to consider irreducible plane curve singularities and primitive sandwiched singularities.
A sandwiched surface singularity is a normal surface singularity occurring on a
surface which admits a birational morphism to a smooth surface. The sandwiched
87
88
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
surface singularities are easily seen to be rational but not all rational surface singularities are sandwiched. For instance, all rational surfaces singularities with reduced
fundamental cycle, that is the minimal surface singularities, are sandwiched.
Any sandwiched singularity may be obtained from a plane curve singularity by
blowing down non −1-curves from an embedded resolution of the plane curve singularity. The resulting surface contains only sandwiched singularities. Such surface
may also be obtained by blowing up a smooth surface in a sheaf of complete ideals with finite cosupport. This gives loosely the connection between the different
moduli problems. To proceed we impose numerical invariants to the objects of
consideration. For the plane curve singularities, this is the semigroup and for sandwiched surface singularities this is the dualgraph of resolution. For complete ideals
we follow [Spi90b] and consider the dualgraph corresponding to a set of quadratic
transformations uniquely determined by the complete ideal. This graph is equivalent
to the semigroup of a generic element in the ideal and an integer a, determining the
order of contact between generic elements. The dualgraph of a sandwiched surface
singularity is a subgraph of such.
We investigate the possibility of representing the functors by coarse moduli
spaces, but our result and the work in [LP88] already show that the existence of
coarse moduli space may in general not be expected. Thus we must make a more
carefully study. Our method is to find a parameterizing space which parameterizes
all objects we want to classify, and to identify a group action on this space which
identifies isomorphic fibers. In oder to ensure the right universal properties, we
must globalize the formal results of chapter 3. The main ingredients is the Artin
Approximation theorem.
To find a group action which identify isomorphic objects, we study a particular
global Kodaira-Spencer map and its kernel. This gives a Lie algebra of vector fields
on the parameterizing space, and the integral sub manifolds are the locally trivial
sub families. In these matters we follow [LP88] but we must prove that a certain set
of conditions are satisfied in order to apply their theory.
Acknowledgement
I thank first my supervisor Jan Christophersen for his support. I also thank Olav
Arnfinn Laudal for explaining the theory in [LP88]. Some of the research presented
in this paper was done while the author was visiting Universität Kaiserslautern. We
give our thanks to every person in the Singularity/Algebraic geometry group for
their hospitality and for all their practical and mathematical help. In particular I
thank Prof. Gerhard Pfister.
Under my stay in Kaiserslautern, I was supported in part by the Research Council
of Norway.
4.2. PRELIMINARIES
89
Notations
All rings and schemes in this paper are taken to be defined over C. All schemes are
separated. We will say that a scheme is algebraic if it is (essentially) of finite type
over C.
With normal singularity we would like to think of a normal complete local Calgebra, or the Spec of such ring. From [Art69a, Th. 3.8] we know that such
singularities are algebraic and we will also consider algebraic representatives. We
will speak of such as singularities as well.
4.2
Preliminaries
4.2.1
Deformations
Let X by any scheme over C. A deformation of
diagram
X
−−−−→
y
X over a C-scheme S is a cartesian
X
y
Spec C −−−−→ S
where X is flat over S. The fiber giving X will be called the central fiber. Sometimes
we will consider S as a germ of an algebraic space or restrict attention to base spaces
S which are Spec of a Hensel local C-algebra.
Let C denote the category of local Artin C-algebras. Functors C → Sets will be
called infinitesimal deformation functors.
4.2.2
Rational surface singularities
Recall that a normal surface singularity X = Spec B is said to be rational if for any
e → X, H 1 (X,
e O e ) = 0. The exceptional set E ⊂ X
e is a union of
resolution π : X
X
1
irreducible components Ei ' P . There is a fundamental cycle supported on E which
P
may be constructed as the unique smallest positive divisor Z =
mi Ei satisfying
Z · Ei ≤ 0 for all irreducible component Ei . The embedding dimension of X equals
−Z 2 + 1 and the multiplicity e − 1 = −Z 2 .
Given a normal surface singularity we will often consider the minimal good resolution. A good resolution has the property that all exceptional curves intersects
transversally and when they intersect, there are only two intersecting in one point.
For rational surface singularities the minimal resolution is always the minimal good
resolution.
We will consider two normal surface singularities X and X 0 to be equivalent if
90
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
there is a common étale neighborhood of the singular points x ∈ X and x0 ∈ X 0 :
(X, x) ← (E, e) → (X 0 , x0 ).
4.2.3
Dual-graphs for normal surface singularities
It is common to describe the configuration of the exceptional curves in the minimal
good resolution of a normal surface singularity, by a graph. This is called the
dualgraph of resolution and it is an invariant of the singularity. Accordingly, one
sometimes speaks of the dualgraph or only the graph of the singularity. We will
recall the definition, but first we fix some notations on graphs.
A weighted graph Γ is an ordered triple (v, e, w) such that e is a subset of
unordered pair of elements in v and w is a map w : v → Z. We assume that v and e
are finite sets and we refer to v as the vertices and to e as the edges of Γ. The map
w gives the weights.
If Γ is a graph we write v (Γ) for the vertices, e (Γ) for the edges and w (Γ) :
v (Γ) → Z for the weights. We further write xy ∈ e (Γ) for an edge with x, y ∈ v (Γ) .
Two graphs Γ and Γ0 are isomorphic if there is a bijection φ : v (Γ) → v (Γ0 ) such
that φ(x)φ(y) ∈ e (Γ0 ) if and only if xy ∈ e (Γ) .
A subgraph Γ0 ⊂ Γ is an inclusion v (Γ) ⊂ v (Γ) such that xy ∈ e (Γ0 ) if and only
if xy ∈ e (Γ) and such that w (Γ0 ) = w (Γ)|v(Γ0 ) . A subgraph γ ⊂ Γ is called a path
in Γ if v (γ) = {x0 , . . . , xl } and e (γ) = {x0 x1 , x1 x2 , . . . , xl−1 xl } .
e → X be
Now let X = Spec B be a normal surface singularity and let π : X
m
a resolution. Let E = ∪i=1 Ei be the decomposition of the exceptional set into its
irreducible components. We define a graph Γ = Γ(π) as follows: Set
v(Γ) = {E1 , . . . , Em }
and define e(Γ) by the condition that
Ei Ej ∈ e(Γ)
if and only if i 6= j and Ei ∩ Ej 6= ∅, Finally define the weights by
w(Γ)(Ei ) = Ei2 .
Definition 4.2.1. The dualgraph of X is Γ = Γ(X) = Γ(π), where π is the minimal
good resolution of X.
4.2.4
Plane curves
By a plane curve singularity we will mean a scheme
C = Spec C[[x, y]]/(f ).
4.3. INTRODUCTION TO SANDWICHED SINGULARITIES
91
To an irreducible plane curve singularity there corresponds a semigroup S = S(C) :
Let
A = C[[x, y]]/(f ) ⊂ A = C[[t]]
where A is the normalization of A. On the quotient field of A, K, there is a canonical
valuation
v : K \ {0} → Z.
The semigroup S is now the subsemigroup v(A \ {0}) of Z.
By a good embedded resolution of C we mean an embedded resolution such that
the reduced total transform of C is a normal crossing divisor. In particular there
are at maximum two irreducible components intersecting in a point.
From [Art69a, Th. 3.8], it follows that a plane curve singularity C is algebraic,
so we consider also algebraic representatives and we will usually denote such representative by C 0 .
4.2.5
Equisingular deformations
We will talk about equisingular deformations, in the sense of [Wah76] and [Wah74].
For curves we will note the equisingular deformation functor by ESC where C is
a plane curve. This is a subfunctor of the functor Def C of all deformations. The
definition of ESC goes through simultaneous embedded resolutions, so to a equisingular deformation, there always corresponds sections. Successively blow ups of these
sections yield the simultaneous embedded resolution.
For a normal surface singularity X we also have the functor ESX of equisingular
e is the minimal good resolution of
deformations. This is a subfunctor of Def X . If X
e θ(log E)) where
X with exceptional set E, the tangent space ESX (C[ε]) = H 1 (X,
θ(log E) denotes the dual of the sheaf of one forms with logarithmic poles along E.
For a more detailed review on equisingular deformations of plane curves an normal
surface singularities, see section 3.3.2.
4.3
Introduction to sandwiched singularities
In this section we introduce the notion of sandwiched singularities and give some
basic properties. We explain different methods to construct sandwiched singularities, and since we in this paper will pay special attention to primitive sandwiched
singularities of quasi-homogeneous type, after introducing this subclass, we give
properties applying to these singularities.
Definition 4.3.1. A sandwiched singularity is a normal surface singularity which
lie on a smooth projective surface V which admit a birational morphism to a smooth
projective surface S.
92
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
A sandwiched singularity with sandwiching is a germ (V, x) → (S, s) in the étale
topology of a birational map V → S as above where x ∈ V is a singular point.
We usually take an affine representative X = Spec B where B is a finitely
generated C-algebra. Thus we write (X, x) → (A2 , 0) for a sandwiched singularity with sandwiching. Note that two sandwiched singularities with sandwiching
(X, x) → (A2 , 0) and (X 0 , x0 ) → (A2 , 0) are equivalent if we have a commutative
diagram
(X, x) ←−−−− (E0 , e0 ) −−−−→ (X 0 , x0 )
y
y
y
(A2 , 0) ←−−−− (E, e) −−−−→ (A2 , 0)
where the horizontal maps are étale at the given points.
4.3.1
Construction of sandwiched singularities
There is a method of constructing sandwiched singularities from plane curve singularities which goes as follows.
Let
C = Spec C[[x, y]]/(f )
be a plane curve singularity, and let
Sn −−−−→ Sn−1 −−−−→ · · · −−−−→
x
x
S0 = Spec C[[x, y]]
x
Cn −−−−→ Cn−1 −−−−→ · · · −−−−→ C0
(4.3.1)
=C
be an embedded (possibly non-minimal) good resolution of C, obtained by blowing
up closed points, and where Ci is the strict transform of C in Si . Given 4.3.1, there
is a canonical sequence of blowups
π
πn−1
Z = Zn −−−n−→ Zn−1 −−−−→ · · · −−−−→ Z0 = Spec C[x, y]
(4.3.2)
which induces the first row of (4.3.1) by the base change
Spec C[[x, y]] → Spec C[x, y].
Let π be the composition of the maps in (4.3.2), and let
E = π −1 (0) = ∪m
i=1 Ei
be the decomposition of the exceptional set into its irreducible components. Assume
Er , . . . , Em are those with Ei2 = −1. Now the intersection matrix of E1 , . . . , Er−1
is negative definite, so we may blow these curves down to obtain a surface Y. This
4.3. INTRODUCTION TO SANDWICHED SINGULARITIES
93
surface is in fact algebraic, see proof of Proposition 4.3.3, below. Moreover, if (4.3.1)
does not give the minimal good embedded resolution for any of the branches of C, Y
will have a unique singular point, and one may show that up to analytic equivalence,
this singularity depends only on the analytic equivalence class of C. In particular
we may assume that C is defined by a polynomial f. Thus we have C 0 = V (f ) ⊂ Z0
e ⊂ Z to be the strict transform of C 0 . Put X
e = Z \ C.
e Then X
e is
and we define C
the minimal good resolution of an affine X ⊂ Y which contains the singular point.
Let k be the number of analytic branches of C. We take a ∈ Nk and let ai give
the number of extra blowups needed in each branch to get π : Z → Spec C[x, y] from
the minimal good resolution. The fact that ai ≥ 1 for i = 1, . . . , k corresponds to
the assumption that the embedded resolution is not minimal for any of the branches
of C. We are in the following situation:
Z ←−−−−
y
e
X
y
Y ←−−−− X
y
A2
e where
Let C ∗ denote the total transform of C 0 in Z. Then C ∗ = D + C,
D=
X
mi E i .
We put q = Γ(Spec C[x, y], OZ (−D)) ⊂ C[x, y].
Definition 4.3.2. We define Z(C,a) := Z, Y(C,a) := Y and X(C,a) := X, where X, Y
and Z are constructed as above. Also we set q(C,a) := q.
We will consider two surfaces Y and Y 0 of the form Y(C,a) to be equivalent if
they have a common étale neighborhood of the exceptional set E ⊂ Y and E 0 ⊂ Y 0
of the maps Y → A2 and Y 0 → A2 . This means that we have étale maps
(Y, E) ← (E, E) → (Y 0 , E 0 )
where E is mapped isomorphically to E and E 0 .
Proposition 4.3.3. Up to equivalence, all sandwiched singularities are obtained
as X(C,a) for a plane curve singularity C and a ∈ Nk , and Y(C,a) is the blowup
of A2 in q(C,a) . Moreover any two surfaces Y(C,a) are equivalent if and only if the
corresponding C-algebras C[x, y]/q(C,a) are isomorphic. Sandwiched singularities are
rational.
94
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Proof. The rationality follows from the Leray spectral sequence. In fact, let π1 :
Z → Y be the natural map. Then we have
e O e ) → 0.
0 → H 1 (Y, (π1 )∗ OZ ) → H 1 (Z, OZ ) → H 1 (X,
X
e O e ) = 0. Note also that R1 π1∗ OZ =
As, is well known, H 1 (Z, OZ ) = 0, thus H 1 (X,
X
0.
If X is an algebraic representative of a sandwiched singularity, then by [Spi90b,
Cor. 1.14] and [Art69a, Cor. 2.6], X is equivalent with some X(C,a) .
For the proof that Y(C,a) is the blowup of A2 in q(C,a) , we will refer to [Lip69].
We note that the intersection product on exceptional curves in [Lip69] coincide with
the usual, see [Har77]. From [Lip69, Th. 27.1] it follows that the surface Y exists as
a scheme relatively projective over A2 . In the proof of [Lip69, Th. 27.1] there is an
invertible sheaf L = OZ (L), such that L · Ei = 0 for the contracted curves. Now, let
E = D ∈ Pic(Z/A2 ) : D · Ei ≤ 0 for all Ei .
Then E is closed under addition, [Lip69, p. 238], and there exist D1 , . . . , Dn ∈ E such
that D1 , . . . , Dn are the indecomposable in E, [Lip69, 17.2, 19.1, 19.2]. (The elements
in E are in one to one correspondence with complete ideals q, see Section 4.3.2 below,
in C[x, y] such that qOZ is invertible, [Lip69, p. 239, 12.1]. The correspondence
is given by D 7→ Γ(Spec C[x, y], π∗ OZ (−D)).) From [Lip69, 21.1] it follows that
P
L · Ei ≥ 0. So, −L = ni=1 si Di , and from [Lip69, 19.2] Di · Ej = −1 for j = i and
0 otherwise. Thus
(
si = L · Ei =
0 for i ≤ r
> 0 otherwise.
Here Dr , . . . , Dn are the maximal among the elements in E. These corresponds to
the simple components qr , . . . , qn of q(C,a) . Thus we see from the proof of [Lip69,
27.1] that
Y ' Proj ⊕Γ(Z, L⊗m ) ' Proj ⊕(qαr r · · · qαnn )m ' Proj ⊕(qr · · · qn )m .
(The last isomorphism is easily seen.)
If Y(C,a) and Y(D,b) are equivalent it is easy to see from the definition of q(C,a)
that the corresponding C-algebras C[x, y]/q(C,a) and C[x, y]/q(D,b) are isomorphic.
The other direction is also clear.
Definition 4.3.4. We will call a surface of the type Y = Y(C,a) for a sandwiched
surface.
4.3. INTRODUCTION TO SANDWICHED SINGULARITIES
4.3.2
95
Complete ideals
Sandwiched singularities are related to complete ideals. In fact we will see that the
ideal q = q(C,a) is complete. The study of complete ideals was introduced by Oscar
Zariski in [Zar38].
Definition 4.3.5. Let R be a regular local ring, and let K be the field of fractions.
Let I ⊂ R be an ideal, and let z ∈ K. Then z is integrally dependent on I if there
is an equation
z n + a1 z n + · · · + an = 0
with ai ∈ I i .
In the above definition, the set of elements z ∈ K which are integrally dependent
on I is easily seen to be an ideal, I ⊂ R.
Definition 4.3.6. If I = I then I is said to be complete.
We will only consider complete ideals in two dimensional regular local rings. As
it is easily seen that hight one ideals must be complete, it does not seem necessary to
use the qualification complete in this case. Thus, further on, when we speak about
complete ideals, these will always be taken to have maximal hight. We will also
speak of complete ideals in regular, but not necessarily local rings, meaning that,
when localizing in the maximal ideal containing it, the extension to the localization
is complete.
There exist now a vast literature on complete ideals, but what we will need is
contained in [Lip69], [Spi90b], [ZS60] and [Zar38].
Remark 4.3.7. In the notation above, for any effective divisor D0 ⊂ Z,
Γ(Spec C[x, y], OZ (−D0 )) ⊂ C[x, y]
will always be complete. It is also true that an ideal in a regular 2-dimensional ring
is complete if and only if the the blowup in this ideal is normal. See, [Lip69, Lemma
5.3, Prop. 8.1]
From the remark it follows that q ⊂ C[x, y](x,y) is complete.
We have seen that the blowup of A2 in a complete ideal, we get a normal surface
over A2 . If the ideal is not complete this is not the case. It is however interesting to
note the following.
Proposition 4.3.8. Let R = C[x, y]. Let f, g ∈ mR ⊂ R. Let C = V (f ) ⊂ Spec R
and D = V (g) ⊂ Spec R. Assume that the strict transform of D in Z(C,a) is smooth
−1
and only intersects π(C,a)
(0) in each of the −1 curves Er , . . . , En in one point but
never in the same as the strict transform of C. Then Y(C,a) is the normalization of
the blowup of Spec R in the ideal b = (f, g) ⊂ R.
96
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Proof. We first note that the ideal b is mR -primary since under the given assumptions
g cannot be a zero divisor modulo f. We further note that the normalization of the
blowup of b is the blowup of the completion of b. So let q be the completion of b.
Then since b ⊂ q(C,a) , we have q ⊂ q(C,a) . The rest of the proof uses the description of
complete ideals given in [ZS60, Vol II, p. 362ff.]. Assume first that C is irreducible.
In the notation of [ZS60] blowup until the strict transform of q(C,a) is maximal. Let
Op be the corresponding local ring. Then the strict transform of f and g will be a
regular system of parameters for this ideal. Thus bOp = q(C,a) Op . Since q is complete
it is contracted, see [Lip69, Prop. 6.2], thus q = bOp ∩ C[x, y] = q(C,a) Op ∩ C[x, y] =
q(C,a) , since q(C,a) is contracted.
Q
Now assume C to be reducible, then also D is reducible. Let f = ki=1 fi
Q
and g = ki=1 gi . From [Zar38] it follows that decomposing q(C,a) = q1 · · · qk into
simple complete ideals corresponds to the decomposition of a general element into
its irreducible factors. Thus we have (fi , gi ) ⊂ qi and we may use the first part of
the argument.
Thus if Y = V (f T1 − gT2 ) ⊂ P1A2 , then Y(C,a) is the normalization of Y. It follows
that every sandwiched singularity naturally is the normalization of a hypersurface
singularity. Note also that this is exactly the projection studied in [dJvS95]. Further
remark that in general sandwiched singularities are not hypersurface singularities.
In fact the An singularities are the only complete intersection singularities which are
sandwiched. (In [Spi90b] it is remarked that An are the only rational double points
which are sandwiched. From [Wah77] it follows that the rational double points are
the only rational surfaces singularities which are complete intersections.)
The following lemma is easily proved, using the universal property of blowing
up.
Lemma 4.3.9. Let X be a scheme. Let I1 and I2 be sheaves of ideals on X. Let X1
be the blowup of X in I1 . Let X2 be the blowup of X1 in I2 OX1 . If X3 is the blowup
of X in I1 I2 , then X2 and X3 are naturally isomorphic over X.
Proof. Clearly, I1 OX2 and I2 OX2 are invertible. It follows that I1 I2 OX2 is invertible.
On the other side, we claim that I1 OX3 is invertible. In fact, locally over, Spec A ⊂ X
we have Spec B ⊂ X3 , B = A[ fI11 fI22 ], where Ii := Ii (Spec A), and fi ∈ Ii , and X3 is
2
covered by such. Let h ∈ I1 . Then fh1 = fhf
∈ B, so h ∈ (f1 ) = f1 · B. It follows
1 f2
that I1 · B = (f1 ). Thus I1 OX3 is invertible. Similarly, I2 OX3 is invertible. From the
universal property of blowing up, the conclusion follows.
Let Z be obtained from A2 by a sequence of quadratic transformations:
Z = Zn → Zn−1 → · · · → Z1 → Z0 = A2 .
4.3. INTRODUCTION TO SANDWICHED SINGULARITIES
97
Let πi : Zi → A2 be the composed maps. Assume that mij are ideal sheaves on Zi ,
each with cosupport on a closed subset, corresponding to the points in Zi which are
blown up. (For i = 0 there is only one m0j , namely the one corresponding to the
maximal ideal (x, y) ⊂ R = C[x, y].) Now let qij = πi∗ mij . Under inclusion, the qij
form a tree, which we will denote by T q.
Proposition 4.3.10. In the notation above, let
Y
a=
q.
q∈T q
Then we have Z ' Proj(
L
r≥0 a
r)
over A2 .
Proof. We have qij OZi = mij · OZi (−D), where D is an effective divisor supported
on the exceptional set of πi . In particular, OZi (−D) is invertible. Thus the blow up
of Zi in mij coincides with the blowup of Zi in qij OZi . We use induction on n, the
case n = 1 being clear. Let T qr be the tree consisting of qij for i < r. Let
Y
a0 =
q.
q∈T qn−1
Q
L
By induction Zn−1 ' Proj r≥0 a0 r . Now Zn is the blowup of Zn−1 in i=n−1 qij OZn−1 .
L
From the lemma above, Z ' Proj r≥0 ar .
4.3.3
Combinatorics of sandwiched singularities
We will not discuss the combinatorics of sandwiched surfaces in detail, but only
review some notation and fundamental facts. As for all normal surface singularities,
we attach to a sandwiched singularity a a dualgraph Γ. To a sandwiched surface Y(C,a)
there corresponds also a dual graph Γ∗ , namely the dualgraph Γ of the “resolution”
Z(C,a) → A2 of the smooth point. It is clear from what we know until now that
v(Γ) ⊂ v(Γ∗ ) and that v(Γ∗ ) \ v(Γ) is the set of nodes with weight −1. The Γ∗ is
equivalent to the data given by topological type of C together with a ∈ Nk . For an
explicit description of this correspondence in the case where C is irreducible, see
chapter 3. We note also that if Γ is a dualgraph of a sandwiched singularity, then all
singularities with this dualgraph are sandwiched, see [Spi90a]. Bellow we give these
details when C is irreducible and of quasi-homogeneous type.
Primitive sandwiched singularities of quasi-homogeneous type
In this subsection we include some results which apply to primitive sandwiched
singularities of quasi-homogeneous type. A sandwiched singularity is said to be
primitive if we may obtain it as X(C,a) for a irreducible plane curve singularity C.
98
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
This is the case if and only if q(C,a) is a simple ideal. An isolated singularity is said to
be of quasi-homogeneous type if there is a quasi-homogeneous singularity with the
same dualgraph. If X is a primitive sandwiched singularity of quasi-homogeneous
type, it may be proven that up to analytic equivalence of the singularity we may
assume that X = X(C,a) for a curve C of quasi-homogeneous type. In fact given
such a sandwiched singularity X, it is known that Γ has at most one star. If we in
addition know that X is primitive, we know that there is a Γ∗ such that Γ ⊂ Γ∗ and
v(Γ∗ ) \ v(Γ) consist of one vertex. Such Γ∗ , see below, corresponds to the topological
type of a quasi-homogeneous curve singularity. Now the topological type of such a
plane curve singularity is determined by its semigroup generated by two natural
numbers p and q such that (p, q) = 1 and p < q. Let ap,q,a be the ideal generated by
the monomials of the form xi y j such that iq + pj ≥ pq + a. Then we have
q(C,a) = (f ) + ap,q,a
where f defines C, see [Spi90b]. We will denote the dual-graphs of sandwiched
surfaces and sandwiched singularities with Γ∗p,q,a and Γp,q,a respectively. Let
p
= a1 +
q
1
a2 + · · · +
1
am + 1
Then Γ∗p,q,a is indicated in figure 4.2 and 4.1. Remark that the vertices with no
weight given are taken to have weight −2.
Figure 4.1: Γ∗p,q,a for m odd.
4.4. DEFORMATION OF IDEALS
99
Figure 4.2: Γ∗p,q,a for m even.
We have now introduced sandwiched singularities in general and primitive sandwiched singularities of quasihomogeneous type i particular. We have also introduced
complete ideals.
Searching to understand the moduli of plane curve singularities, complete ideals
and sandwiched surface singularities, and the interaction between them, is the focus
of this and the previous chapter. In this chapter we will in particular try to find
coarse moduli spaces for the moduli functors to be introduced in section 4.6. We succeed in doing so for primitive sandwiched singularities with sandwiching and plane
curve singularities of quasihomogeneous type, after fixing some invariants which are
defined through the geometry of our situation. The complete ideals will serve as an
important tool in our considerations.
4.4
Deformation of ideals
In this section we consider deformations (on the category C of local Artin C-algebras)
of a complete ideal and relate to deformations of the blow up in this ideal.
In this section we do not reserve Z for schemes constructed as Z = Z(C,a) .
Let i be any ideal in R := C[x, y]. Let A be a local Artin C-algebra. We consider
n
ideals i ⊂ A ⊗C C[x, y], such that i is flat over A for all n > 0, and such that
100
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
0
i ⊗A C = i. This will be a deformation of i. To deformations i and i are equivalent or
isomorphic if there is an automorphism of A ⊗C C[x, y], pulling back to the identity
0
on C[x, y], which takes i to i .
Definition 4.4.1. We define NFDef i to be the functor of classes of deformations of
i as above.
Let a be a complete ideal and let Z be the blowup of a, and let a represent
L
an element in NFDef a (A). Then Proj an is flat over Spec A, and this defines a
natural transformation of functors
NFDef a → Def Z .
Theorem 4.4.2. Let a ⊂ R be any complete ideal, and let Z be the blowup of A2
in a. On the category C, of local Artin C-algebras the natural transformation
NFDef a → Def Z .
is an isomorphism.
2
Proof. We note first that we have Z ⊂ Pm
C × A , and so we have a relative (to the
morphism π : Z → A2 ) very ample invertible sheaf L on Z. We may, and we will,
in fact take L = aOZ .
Let Z represent an element in Def Z (A), A ∈ C. We have a natural map Z →
Spec H 0 (Z, OZ ). Note that H 1 (Z, OZ ) = 0 implies that H 0 (Z, OZ ) is an A-flat lifting
of H 0 (Z, OZ ), see [Wah76, Th 0.4], and note that A ⊗ R ⊂ H 0 (Z, OZ ). Let C be the
cokernel. Then C ⊗A C = C/mA C = 0 since R = H 0 (Z, O) because of normality.
But as mA is nilpotent it follows that C = 0. Thus A ⊗ R = H 0 (Z, OZ ), and we
get a deformation π : Z → Spec A × A2 of π. Also, since π is projective, hence
proper, it follows that π is proper. There is a series of obstructions for lifting L to
Z which sits in H 2 (Z, OZ ). But this last group is zero, so we may find a lifting L
of L to Z. The deformation class of L is unique since H 1 (Z, OZ ) = 0. From the
[EGA3, Th. 4.7.1] it follows that L is ample relative to π : Z → Spec A × A2 . From
[Lip69, Cor. 7.4] it follows that L is very ample relative to π : Z → Spec A × A2 .
Moreover, in fact, from [Lip69, Th 12.1], it follows that H 1 (Z, L) = 0 and hence
from [Wah76, Th. 0.4] that H 0 (Z, L) is an A-flat lifting of H 0 (Z, L). It follows that
the generating global sections of L lifts to generating global sections of L. Thus we
have Z ⊂ Pm × Spec A × A2 for the same m as for Z.
Now let a = H 0 (Z, L). This is an A-flat lifting of H 0 (Z, L) and H 0 (Z, L) = a
since a is a complete ideal. Thus we have a lifting of a as an R-module. Since
a is of height 0 in C[x, y], it follows the proof of [Art76, Th. 5.1] (essentially the
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
101
Hilbert-Burch Theorem) that there is a unique inclusion a ⊂ A ⊗ R. We have also a
natural inclusion
M
M
⊗n
H 0 (Z, L )
an →
n≥0
n≥0
of graded A ⊗ R-algebras. Since H 1 (Z, OZ ) = 0 it follows from [Wah76, Th. 0.4]
that H 1 (Z, OZ ) = 0. Then it follows from [Lip69, Lemma 7.3] that the map above
⊗n
is surjective and thus that an = H 0 (Z, L ). Since L is ample, it follows as above
⊗n
that H 1 (Z, L⊗n ) = 0 and that an = H 0 (Z, L ) is A-flat. We have Z ⊂ P :=
Pm × Spec A × A2 given by some sheaf of ideals I. The sequence
0 → I(n) → OP (n) → (OP /I)(n) → 0
gives Sn = H 0 (OP (n))/H 0 (I(n)) ⊂ H 0 ((OP /I)(n)) → H 1 (I(n)). Now H 0 ((OP /I)(n)) =
⊗n
H 0 (Z, L ) = an and from [Har77, III.5.2] H 1 (I(n)) = 0 for n ≥ n0 for some n0 > 0.
Then from [Har77, Ex. II.2.14] the inclusion
M
M
Sn →
an
n≥0
n≥0
induces an isomorphism of Z = Proj ⊕Sn with Proj ⊕an . From [Har77, Ex. II.3.12]
we may assume that S0 = A ⊗ R. We have now proved that the transformation is
surjective.
L
To prove that the map is injective, assume that π i : Z i = Proj( ani ) → Spec A×
A2 gives φ : Z 1 ' Z 2 with φ inducing the identity on the closed fiber.
Now φ∗ (a1 OZ 1 ) is an invertible sheaf on Z 2 lifting L = aOZ . Since H 1 (Z, OZ ) =
0, this is isomorphic to a2 OZ 2 , as liftings of OZ -modules. The isomorphism φ induces
an automorphism θ : A ⊗ R = H 0 (Z 2 , OZ 2 ) → H 0 (Z 1 , OZ 1 ) = A ⊗ R, and it follows
that θ−1 (a1 ) = H 0 (φ∗ (a1 OZ 1 )) and a2 are equivalent liftings of the R-module a.
Again, from the proof of [Art76, Th. 5.1], this means equal liftings of the ideal a.
From this follows that θ−1 (a1 ) = a2 .
Remark 4.4.3. It follows from the theorem that all deformations of a sandwiched
surface Y = Y(C,a) are of the form Proj ⊕qn , where q is a deformation of q, such that
qn is flat. Here q = q(C,a) .
4.5
Local deformations in the étale topology
We want to construct coarse moduli spaces, and for this we need a way to detect
trivial subfamilies. The “first order part” of this question is given by the KodairaSpencer map. However, in general it is not sufficient to consider the “first oder
part” only. We want to show that that in our situation it is enough to consider the
102
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Kodaira-Spencer map. This problem is considered in [LP88] and we refer to this
work. Here certain conditions are used and we will show that these are satisfied.
The most important of these conditions are the condition on algebraization of formal
moduli. This is the problem we will consider in this section.
In chapter 3, we defined the functors ESY , G and F on C, the category of local
Artin C-algebras. For the problems in this paper, it will not be sufficient to consider
deformations over local Artin C-algebras, so in this section we consider also functors
on the category of schemes or the category of germs of schemes of finite type over C
in the étale topology. We will concerned with the existence of an algebraic family,
realizing the the formally versal families, and which are not only formally versal,
but also versal in the étale topology.
Many of the results in this section are extensions of the infinitesimal theory in
chapter 3. However we consider also new aspects of the infinitesimal theory.
Firstly we do some work in order to prove that there is a algebraic versal deformation of a resolution Z of a sandwiched surface or sandwiched singularity which is
versal in the étale topology, see Section 4.5.4. This was originally considered because
of the conditions in [LP88], see Section 4.7. Although the theory in [LP88, Ch. 3]
is developed with respect to the functor of all deformations and the use is made
of the corresponding algebra-cohomology, we believe that it would be sufficient to
consider algebraization of the equisingular functors. However, the existence of an
algebraic versal family of deformations of Z is interesting as a separate question. If
the notions of deformations are correctly defined it would be possible to deduce this
from the results in [Art74]. We chose a point of view which is particular for our
situation: We use the results of Section 4.4
Secondly, we consider deformations of sandwiched singularity with sandwiching.
Thirdly, we extend the functors considered in chapter 3 and the relations between
them in the case where we consider base spaces as germs of schemes of finite type
over C in the étale topology.
4.5.1
The Approximation Theorem
We will be concerned with contravariant functors
F : (Schemes/C) → Sets
which are locally of finite presentation, see [Art69a]. The key result in extending the
formal theory in chapter 3 is Artin Approximation theorem. In [Art69a] there are
different formulations of the theorem, but the most convenient for our applications
is essentially given in [Art69b].
Lemma 4.5.1 (Artins Approximation Theorem).
Let (S, s) and (S 0 , s0 ) be schemes of finite type over C with distinguished points, and
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
103
b S,s ) be the induced element (via the morphism
let ξ ∈ F (S), ξ 0 ∈ F (S 0 ). Let ξˆ ∈ F (O
0
b S,s → S) and ξˆ ∈ F (O
b S 0 ,s0 ) similarly. Assume that there is a morphism
Spec O
b
b
b S,s ) → F (O
b S 0 ,s0 ), ξˆ is mapped
φ : OS,s → OS 0 ,s0 such that under the induced map F (O
to ξˆ0 . Then there exist a scheme S 00 of finite type over C, s00 ∈ S 00 , morphisms
f : S 00 → S, f 0 : S 00 → S 0 , ξ 00 ∈ F (S 00 ) such that f (s00 ) = s, f 0 (s00 ) = s0 , f 0 is étale
and such that ξ and ξ 0 both induce ξ 00 . Moreover, f is étale if φ is an isomorphism.
Proof. The proof is a modification of the proof of Theorem 1.7 of [Art69b] which we
write out for the convenience of the reader. The element ξ ∈ F (S) gives a natural
transformation Hom(−, S) → F which we also denote by ξ. In the same manner we
have ξ 0 : Hom(−, S) → F. We have the morphism ψ
Spec ÔS 0 ,s0 → S 0
and the composition ψ 0
Spec ÔS 0 ,s0 → Spec ÔS,s → S.
Under the induced maps ξ 0 7→ ξˆ0 and ξ 7→ ξˆ0 . This means that (ψ, ψ 0 ) is an element
∈ Hom(−, S) ×F Hom(−, S 0 )(Spec ÔS 0 ,s0 ). Since Hom(−, S), Hom(−, S 0 ) and F are
locally of finite presentation, the same will be true for Hom(−, S)×F Hom(−, S 0 ), see
[Art69b, proof of Theorem 1.7]. We may use the Approximation theorem [Art69a,
Corollary 2.2] to conclude the existence of an étale neighborhood (S 00 , s00 ) of s0 in S 0
and an element 00 ∈ Hom(−, S) ×F Hom(−, S 0 )(S 00 ). Thus we have maps f : S 00 → S
and f 0 : S 00 → S 0 . Since f 0 approximates ψ, it induces an isomorphism ÔS 0 ,s0 →
ÔS 00 ,s00 . Thus by restricting S 00 we may assume that f 0 is étale. Lastly, if we denote
by ξ 00 the image of ξ under F (f ), it is clear that F (f 0 ) maps ξ 0 to ξ 00 .
4.5.2
Étale-topology, deformations and versality
Let X = Spec B be a sandwiched singularity with B a finitely generated C-algebra.
A deformation of X over a scheme S is a diagram
X
y
φ
−−−−→ X
y
Spec C −−−−→ S
such that φ induces an isomorphism X ' X ×S Spec C and such that X is flat and
of finite presentation over S. Moreover, we assume that the locus ∆ where X is
not smooth (over S), is finite over S. By abuse of notation we will write X for a
deformation of X.
104
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Let S be a scheme. Recall that an étale-neighborhood π : (E, ∆) → (S, R)of a
subscheme R ⊂ S, is an étale map π : E → S such that it maps ∆ isomorphic onto
R.
We will say that two deformations
X
y
φ
−−−−→ X
y
Spec C −−−−→ S
and
X
y
φ
−−−−→ X
y
Spec C −−−−→ S
are equivalent or isomorphic if there is a common étale neighborhood E of ∆ ⊂ X
and ∆ ⊂ X. That is, we have two étale maps, π : (E, F ) → (X, ∆) and π : (E, F ) →
(X, ∆), such that they induce the same π : (E, e) → (X, x), where x ∈ X is the
singular point.
Definition 4.5.2. We will denote by
Def X : Schemes → Sets
the functor which to a scheme S associates the set of equivalence classes of deformations of X as above.
e be the minimal resolution of X. A deformation of the resolution X
e is a
Let X
diagram
X
y
φ
e
−−−−→ X
y
Spec C −−−−→ S
e ×S Spec C and such that X
e is smooth and
such that φ induces an isomorphism X ' X
e to represent an element in Def e (S)
of finite presentation over S. In order for X
X/X
we demand that there is a deformation X over S of X and a proper S-morphism
e gives the minimal resolution on each fiber.
e → X such that X
X
Two such deformations
e → X and X
e →X
X
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
105
are said to be equivalent if X and X are equivalent by a common étale neighborhood
π : (E, F ) → X and π : (E, F ) → X,
inducing the same neighborhood (E, e) → (X, x) of the singularity x ∈ X, such that
we have an isomorphism
e× E'X
e× E
X
X
X
over E pulling back to the identity over E.
Definition 4.5.3. We define
Def X/X
: Schemes → Sets
e
e as above.
to be the functor associated to the deformations of X
Let Z be of the form Z = Z(C,a) . From Proposition 4.3.10 it follows that Z is
the blowup of A2 in a complete ideal a. We now make the following definition.
Definition 4.5.4. We define
Def Z/A2 : Schemes → Sets
as the functor which to a scheme S gives the set of isomorphism classes of diagrams
Z
y
−−−−→
i×id
Z
y
2
Spec C × A2 −−−−A→ S × A2
such that the map Z → S × A2 is obtained as the blowup of S × A2 in a sheaf of
ideals a which induces a on A2 via the the morphism A2 ' Spec C × A2 → S × A2
L n
and such that
a is S-flat and of finite presentation over S. Here we say that two
such deformations
0
Z → S × A2 and Z → S × A2
are isomorphic if there is a common étale neighborhood
: (E, F ) → (S × A2 , V (a)), 0 : (E, F ) → (S × A2 , V (a0 ))
0
(inducing the same (E, e) → (A2 , 0)) such that Z ×S E and Z ×S E are isomorphic
over E by an isomorphism inducing the identity over E when pulled back.
We will denote by Def Z the usual deformation functor on the category C of local
Artin C-algebras.
106
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
4.5.3
Hulls and formal versality.
b ξ), where A
b is a complete local C-algebra
Let F : C → Sets be a functor. A pair (A,
b n ) is called a versal pair, if the
b n ∈ C and ξ = {ξn } ∈ lim F (A/m
such that A/m
A
←−
following condition is satisfied
• Let j : A0 → A be a surjection in C and assume η 0 ∈ F (A0 ) induces η ∈ F (A).
b → A such that F (φ)(ξ) = η there exist φ0 : A
b → A0
For every morphism φ : A
0
0
0
such that F (φ )(ξ) = η and such that j ◦ φ = φ.
b ξ) a miniversal
If in addition φ0 is unique when A = C and A0 = C[ε] we call (A,
pair or a hull.
In chapter 3 it is implicit understood that the deformation functors studied have
hulls. This follows from standard arguments. We will here briefly recall the argument
needed in the case of Def Z , Def Y and ESY . One uses the conditions H1 , H2 and H3
of [Sch68]. From chapter 3 we have that ESY ⊂ Def Y , and it is shown in [Sch68, sec.
3], that H1 and H2 is satisfied for Def Y . To show that H3 is satisfied we need to show
that the tangent space Def Y (C[ε]) is finitely generated over C. This follows since
Def Y (C[ε]) may be identified with T1Y which in our case sits in the exact sequence
0 → H 1 (Y, θ) → T1Y → H 0 (Y, TY1 ) → 0.
We know that H 0 (Y, TY1 ) is finitely generated over C since Y has isolated singularities. Also, H 1 (Y, θ) = R1 π∗ θ is coherent and supported at the origin of A2 .
It follows that T1Y is a finitely generated C-vectorspace. Here π : Y → A2 is the
natural map. It follows that H3 is satisfied for Def Y (C[ε]). It follows that H3 is
satisfied for ESY , and in fact H2 is satisfied if H1 is. To prove H1 for ESY , we do
the following observation, see [Wah76, proof of Prop. 2.5]. From [Sch68, §3] we
need to prove that that E ⊂ Z lifts to “sums” of deformations in ESY . To see
0
00
this, assume that Z ∈ ESY (A0 ) and Z ∈ ESY (A00 ) induce Z ∈ ESY (A). We have
0
0
00
00
compatible liftings E ⊂ Z , E ⊂ Z and E ⊂ Z. We need only prove that the the
map OZ 0 ×OZ OZ 00 → OE 0 ×OE OE 00 is surjective, but this is easily checked.
One prove as for Def Y that Def Z has a hull.
The next lemma show that we have a stronger form of versality than in the
definition given above. Note that we will also say that a family is versal if it represent
a versal pair.
Lemma 4.5.5. Let F be one of the deformation functors Def Z , Def Y , ESX or ESY .
Assume that Z → S represent a miniversal pair (Â, ξ) for F, where S = Spec Â. Let
0
A0 → A be a surjection in C and let Z represent an element in F (A0 ). Assume that
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
107
0
Z = Z ×Spec A0 Spec A, and that we are given a diagram
φ
Z ←−−−−
y
Z
y
σ
S ←−−−− Spec A
such that φ induces an isomorphism Z → Z ×S Spec A. Then there exist a diagram
φ0
Z ←−−−−
y
0
Z
y
σ0
S ←−−−− Spec A0
0
such that φ0 lifts φ and σ 0 lifts σ and such that φ0 induces an isomorphism Z →
Z ×S Spec A0 .
Proof. For Def Z and Def Y , the proof given in [Elk70, p. 590] goes through without
modifications. For ESY , one only needs to note, as above, that E ⊂ Z lifts to “sums”
of deformations in ESY , and likewise for ESX .
Remark 4.5.6. In the case of Def Z (Z smooth) the notion of a formally versal algebraic family Z → S in [LP88, 3.6] implies that for every s ∈ S, Z ×S Spec ÔS,s →
Spec ÔS,s represents a versal pair.
4.5.4
.
Versality for Def Z/A2 and Def X/X
e
in the étale
The aim of this section is to prove versality for Def Z/A2 and Def X/X
e
topology. We deduce this from Artins Approximation Theorem. In order to use the
Approximation Theorem, we will have to verify that Def Z/A2 and Def X/X
are locally
e
of finite presentation. To define this notion, let A be a ring and let S = Spec A.
Definition 4.5.7. A contravariant functor
F : Schemes /S → Sets
is said to be locally of finite presentation if for every directed system {Bi } of Aalgebras, the natural map
lim F (Spec Bi ) → F (Spec lim Bi )
−→
−→
is a bijection.
Using the results in [EGA4] it is rather straight forward to prove that Def Z/A2
and Def X/X
are locally of finite presentation. Anyway, we include some of the
e
details.
108
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Lemma 4.5.8. The functors Def Z/A2 and Def X/X
are locally of finite presentation.
e
Proof. We prove the lemma for F = Def Z/A2 , and leave the case F = Def X/X
to the
e
φij
reader. Let {Bi −−→ Bj }i,j∈I be a directed system of C-algebras. Let B = lim Bi .
−→
We will first prove that given an element ξ ∈ F (B) there exist an µ ∈ I and an
element ξ 0 ∈ F (Bµ ) such that ξ 0 maps to ξ ∈ F (B). This will prove the surjectivity
of the natural map
lim F (Bi ) → F (B).
−→
(4.5.1)
L
So, let ξ ∈ F (B) be an element represented by a deformation Z = Proj an . Since
L n
a is of finite presentation over B, a is finitely generated and since
by assumption
any morphism of affine schemes is separated, it follows from [EGA4, Th. 8.8.2], that
n
we may find a0 ⊂ Bµ [x, y] such that Bµ [x, y, a0 t] = ⊕a0 is of finite presentation over
Bµ and such that a0 induces a. Increasing µ if necessary, we may from [EGA4, Th.
L n
11.2.6] assume that
a is Bµ -flat. Blowing up Spec Bµ [x, y] in a, we have found
0
ξ ∈ F (Bµ ) mapping to ξ ∈ F (B), and this finishes the proof of the surjectivity of
4.5.1.
We prove the injectivity. Assume Z k is the blowup of Spec Bk [x, y] in an ideal
ak and Z l is the blow up of Spec Bl [x, y] in al . Assume further that Z k and Z l
induce the same class in F (B). Thus we have two étale maps k : (E, F ) →
(Spec B ×C A2 , V (ak )) and l : (E, F ) → (Spec B ×C A2 , V (al )) such that Z k ×Spec Bk
Spec B ×Spec B[x,y] E and Z l ×Spec Bl Spec B ×Spec B[x,y] E are isomorphic over E. From
[Knu71, Prop 4.5a] we know that k and l are of finite presentation. It is easy to see
that we may find µ ≥ k, l, Eµ , Fµ , (l )µ : (Eµ , Fµ ) → (Spec Bµ ×C A2 , V (ak Bµ [x, y]))
and (l )µ : (Eµ , Fµ ) → (Spec Bµ ×C A2 , V (al Bµ [x, y])) such that (l )µ ⊗Bµ B = l
and (k )µ ⊗Bµ B = k . From [EGA4, 11.2.6], we may, by increasing µ if necessary assume that (l )µ and (k )µ are flat. It follows from standard results that
the two (one for each map) corresponding relative differentials ΩEµ / Spec Bµ [x,y] are
of finite presentation (as modules). From this it follows easily by increasing µ if
necessary, that the two maps are étale. We consider now the directed systems
λ
(k )µ ⊗Bµ Bλ and (l )µ ⊗Bµ B for λ ≥ µ, and using these we consider Z l :=
λ
λ
λ
Z l ×Spec Bλ [x,y] Eµ ⊗Bµ Bλ and likewise Z k . We have lim Z l ' lim Z k . Since now
−→
−→
λ
λ
Z k and Z l are finitely presented over Eλ we have from [EGA4, Cor. 8.8.2.5] that
λ0
λ0
there exists λ0 ≥ k, l, λ such that Z k and Z l are isomorphic over Spec Bλ0 [x, y].
From this we get that Z k ×Spec Bk Spec Bλ0 and Z l ×Spec Bl Spec Bλ0 represent the
same element in F (Bλ0 ).
Proposition 4.5.9. Let Z → A2 be a sequence of point blowing ups and let X be
e be the minimal resolution. Let A
b be a
a sandwiched surface singularity and let X
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
109
Noetherian complete local C-algebra with maximal ideal m. Then the natural maps
b → lim Def Z (A/m
b n)
Def Z/A2 (A)
←−
and
b → lim Def e (A/m
b n)
Def X/X
(A)
e
X/X
←−
are surjective.
Proof. Consider first Def Z/A2 , and let Z n represent a compatible sequence of deb n ). By Theorem 4.4.2, we may find an inverse system
formations in Def Z/A2 (A/m
b n⊗R
e of ideals representing Z n . This determines an ideal â in
an ⊂ Bn := A/m
b
B̂ := lim Bn . Put C = B̂/â. This is a local Noetherian ring, and an A-module.
The
←−
ring C ⊗A C = C/mC = R/a is Artin. From [Mat86, Th. 8.4], it follows that C is a
b
b ⊗ R → C is
finitely generated A-module.
From this one sees that the natural map A
b ⊗ R/e
a → C. It follows
surjective. If e
a is the kernel we have a natural isomorphism A
n
n
b
also that we have natural isomorphisms A ⊗ R/e
a → B̂/â . Since ân is flat by the
b
infinitesimal criterion of flatness, see [Mat86, Th. 22.3], we have that e
an is A-flat,
see [Bou74, Ch.I,§2.5 Prop. 5]. Hence it is clear that we may take the blow up of
 ⊗ R in e
a to have Z such that Z ⊗Â Â/mn .
en represent a compatible sequence of deformations
Consider now Def X/X
. Let X
e
b n ). By definition X
en are resolutions of X n which we may assume
in Def e (A/m
X/X
form a compatible sequence of deformations of X. In the infinitesimal case, there is
a smooth map Def Y → Def X . In the first part of the proof it is not essential that Z
b inducing X n .
smooth. Thus we may find Y representing an element in Def Y /A2 (A)
We may restrict Y to get a deformation X inducing X n for each n. From [Art74,
e 0 over  inducing X
en
lemma 2.2] it follows, that there is a family of resolutions X
for all n ≥ 0.
Corollary 4.5.10. There exists an C-algebra A of finite type, and a deformation
Z in Def Z/A2 (A) which is formally versal. Likewise, there exists an C-algebra A0 of
e in Def e (A0 ) which is formally versal.
finite type, and a deformation X
X/X
Proof. This follows from Artins Approximation Theorem, see [Art69b, Th. 1.6].
Remark 4.5.11. It is nowhere essential that Z is smooth, so we might as well consider
Def Y /A2 . The corollary above, shows that there is an algebraic deformation Y → S
which is formally versal. Moreover, Y is the blowup of S × A2 in an ideal. Hence it
is a family of sandwiched surfaces. Restricting, we get a deformation X → S which
is formally versal. Of course, all fibers are sandwiched singularities. It follows from
the work of Elkik, see [Elk70] that X → S will be versal in the étale topology. This
means that, locally in the étale topology, sandwiched singularities only deforms to
sandwiched singularities. In the analytic context remarked in [dJvS95].
110
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Theorem 4.5.12. Let Z → Spec A × A2 be formally versal in a point a ∈ Spec A
0
for Def Z/A2 . Let Z → Spec A0 × A2 represent an element in Def Z/A2 (A0 ). Assume
that A and A0 are finitely generated C-algebras. Then there is an étale neighborhood
(E, e) → (Spec A0 , a0 ) of the special point a0 ∈ Spec A0 , and a morphism (E, e) →
0
(Spec A, a) such that Z ×Spec A E and Z ×Spec A0 E represents the same deformation
class.
Proof. We will denote by  the completion of A with respect to the maximal ideal
corresponding to the special point a, similarly for Â0 . We will denote by m the
corresponding maximal ideals. Let
ˆ =Z×
Z
Spec A Spec Â.
Let
ˆ
Z
min → Spec Âmin
represent the miniversal formal family, where Âmin is complete. Such representative
exists by Corollary 4.5.10. Then there is an isomorphism Âmin [[z1 , . . . , zn ]] ' Â (for
some n) such that we have a formal isomorphism
ˆ×
ˆ
Z
Spec  Spec Âmin ' Z min ,
when we are remembering the natural section Âmin [[z1 , . . . , zn ]] → Âmin and using
Lemma 4.5.5. Again from Lemma 4.5.5, we have a compatible sequence of diagrams
ζn
0
θ
ˆ×
Z ⊗A0 A0 /mn −−−−→ Z
−−−→
Spec  Spec Âmin −
y
y
Spec A0 /mn
α
−−−n−→
Spec Âmin
ˆ
Z
y
β
−−−−→ Spec Â
0
φ
n
such that the compositions φn = θ ◦ ζn induce isomorphisms Z ⊗A0 A0 /mn −→
Z ⊗A
A0 /mn . The compositions β ◦ αn determines a map  → Â0 , which in turn gives
ˆ is the blowup of Spec Â[x, y] in an
a map ψ : Â[x, y] → Â0 [x, y]. We know that Z
ˆ ⊗ Â0 is the blowup of Spec Â0 [x, y] in ψ(a). We also
ideal a, and it is clear that Z
Â
0
have that Z is the blowup of Spec A0 [x, y] in an ideal a0 , and we have compatible
sequence of infinitesimal automorphisms
Γ(φ )
A0 /mn [x, y] −−−n→ A0 /mn [x, y].
0
It follows from the proof of Theorem 4.4.2, that when considering a fixed Z ⊗A0
A0 /mn → Spec A0 /mn [x, y] the ideal a0 A0 /mn is unique. Similarly, the ideal ψ(a)A0 /mn
is unique, when Z ⊗Â A0 /mn → Spec A0 /mn [x, y] is fixed. Thus it is clear that
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
111
Γ(φn )(a0 A0 /mn ) = ψ(a)A0 /mn . It follows from an argument similar to one in the
proof of Proposition 4.5.9 that Â0 [x, y]/a0 and Â0 [x, y]/ψ(a) are finitely generated
as Â0 -modules, hence complete with respect to the m-adic topology. Thus the limit
of the Γ(φn ) gives an isomorphism Â0 [x, y]/a0 ' Â0 [x, y]/ψ(a). The isomorphism
may be lifted to an isomorphism Â0 [x, y]˜ → Â0 [x, y]˜, where Â0 [x, y]˜ denotes the
henselization of Â0 [x, y] with respect to the maximal ideal m + (x, y), mapping
a0 Â0 [x, y]˜ to ψ(a)Â0 [x, y]˜, see for instance [Art69a, 1.9]. From this it follows that
there is a common étale neighborhood
1
2
Spec Â0 [x, y] ←−
E −→
Spec Â0 [x, y]
such that ∗1 a = ∗2 ψ(a). It is further clear that 1 maps V (∗1 a) isomorphically to V (a)
since 1 is étale and Â0 [x, y]/a is finite over Â0 and hence complete (hence Hensel).
0
From this follows that Z ⊗A0 Â0 and Z ⊗A Â0 represent the same deformation class
in Def Z/A2 (Â0 ). The conclusion now follows from Theorem 4.5.1.
e → Spec A be formally versal in a point a ∈ Spec A for
Theorem 4.5.13. Let X
0
e → Spec A0 represent an element in Def e (A0 ). Assume that A and
Def X/X
. Let X
e
X/X
A0 are finitely generated C-algebras. Then there is an étale neighborhood (E, e) →
(Spec A0 , a0 ) of the special point a0 ∈ Spec A0 , and a morphism (E, e) → (Spec A, a)
0
e ×Spec A E and X
e ×Spec A0 E represents the same deformation class.
such that X
Proof. The proof proceed as above until we get a compatible sequence of diagrams
0
φn
e ⊗A0 A0 /mn −−−
e ⊗A Â
−→ X
X
y
y
Spec A0 /mn
ψn
−−−−→ Spec Â
0
φn
e ⊗A A0 /mn −
e ⊗A0 A0 /mn . To the family X
e
such that φn induce isomorphisms X
→X
0
of resolutions there corresponds a family of singularities X. Likewise, we have X ,
φ
0
n
and φn induce a compatible isomorphisms X ⊗A A0 /mn −→
X ⊗A0 A0 /mn . From
0
[Elk70, p. 600] it follows that X ⊗A Â0 and X ⊗A0 Â0 are equivalent. Restricting
0
e ⊗A Â0 and X
e ⊗A0 Â0 are both family
in the étale topology, we may assume that X
0
e ⊗A Â0 and
of resolutions of X ⊗A0 Â0 . From [Art74, lemma 2.2] it follows that X
0
e ⊗A0 Â0 are representing the same element in Def e (Â0 ). The conclusion now
X
X/X
follows from Theorem 4.5.1.
4.5.5
The equisingular deformation functors
In this section we extend the equisingular deformation functors. We will consider
functors on the category of schemes of finite type over C, or on the category of germs
112
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
of such schemes.
Introduction of ESY . In chapter 3 we defined the infinitesimal deformation functor ESY and gave different characterizations. We will extend ESY . Using the the
viewpoint of normally flat sections this is straight forward, but to fix notation we
review the definition.
Let π0 : Y → A2 be a sandwiched surface and let π : Z → Y be its minimal
resolution. The map π0 ◦ π is a sequence of blowups. We fix such sequence,
π
πn−1
Z = Zn −−−n−→ Zn−1 −−−−→ · · · −−−−→ Z0 = A2 .
(4.5.2)
Assume that
s0 : Spec C → A2
define the origin in A2 and let
sij : Spec C → Zi
define the other points which are blown up in (4.5.2). Let S be a scheme, and let
s0 : S → S×A2
be a normally flat S-section lifting s0 . That is, there is a morphism i : Spec C → S
(which defines the “central point”) such that s0 = s0 ×S idC : S ×S Spec C →
S × A2 ×S Spec C. The section s0 is defined by a sheaf of ideals M on S × A2 such
that Mi is OS -flat for all i. Blow up S × A2 in M,
M
Z 1 = Proj
Mi .
i≥0
Then Z 1 is a flat deformation of Z over S. We may now speak about normally flat
S-sections
s1j : S → Z 1 ,
lifting the s1j and which are compatible with s0 , that is, the composition with the
blow down map to Z 0 is s0 . Now blow up these sections to obtain Z 2 . Continuing
to choose liftings of sij and blowing up we get a deformation of 4.5.2:
Z n −−−−→ Z n−1 −−−−→ · · · −−−−→
x
x
Z 1 −−−−→
x
Z 0 = S×A2
x
i×idA2
Zn −−−−→ Zn−1 −−−−→ · · · −−−−→ Z1 −−−−→ Z0 = Spec C × A2 .
We will say that two such deformations,
n
o
Z i , sij , s0
and
Z i , sij , s0
(4.5.3)
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
113
are isomorphic if there is an étale neighborhood (E, F ) → (S, V (M)) of the image of
the section s0 , such that after replacing Z i with Z i ×S×A2 E and Z i with Z i ×S×A2 E
and changing the sections accordingly, there are isomorphisms (of deformations)
φi : Z i → Z i such that we have commutative diagrams
Z i −−−−→ Z i−1
φi−1 y
φi y
Z i −−−−→ Z i−1
and such that
φi ◦ sij = sij .
We define ESY by letting
(
Set of isomorphism clases of deformations
ESY (S) =
(with sections) as above.
We have actually defined ESY as deformations of Z rather than Y, but as we
will show, this make no difference.
Remark 4.5.14. Recall the definition of Def Z/A2 . Clearly we may as well consider
Def Y /A2 . From Theorem 4.4.2 it follows that we in the infinitesimal case have a
transformation Def Y → Def Y /A2 .
Proposition 4.5.15. Let Y be the blow up of A2 in a complete ideal q. On the
category C of local Artin C-algebras, the transformation
Def Y → Def Y /A2
is an isomorphism.
Proof. From Theorem 4.4.2 it follows that the map is surjective. So, let Y and
0
Y be two deformations over an Artin C-algebra A mapping to the same class in
0
Def Y /A2 (A). Let q and q0 be the two ideals corresponding to Y and Y . From
the definition of equivalence in Def Y /A2 , the proof of Theorem 4.4.2 and the theorem on formal functions, it follows that we have an infinitesimal automorphism
φ : A[[x, y]] → A[[x, y]] taking qA[[x, y]] to q0 A[[x, y]]. Thus it induces an isomorphism ψ : A[[x, y]]/q → A[[x, y]]/q0 . Now A[[x, y]]/q = A[x, y]/q and A[[x, y]]/q0 =
A[x, y]/q0 . Thus we may lift ψ to an infinitesimal automorphism ψ 0 : A[x, y] → A[x, y]
0
approximating φ which takes q to q0 . Thus Y and Y are isomorphic deformations.
We are going to consider deformation functors on the category of germs of
schemes of finite type over C in the étale topology. We will view this as the dual
114
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
of the category of local rings which are henselizations of C-algebras of finite type
over C. Let A be such a ring, and let ξ ∈ F (A) where F is one of our deformation
functors. Since we are working with functors which are locally of finite presentation,
we may always assume that ξ is induced from an element ξ 0 ∈ F (E) where E is
a scheme of finite type over C. Using this we will work with representatives rather
then with Hensel local rings.
Proposition 4.5.16. View ESY and Def Y /A2 as functors on the category of germ in
étale topology schemes (essentially) of finite type over C. Then there is an injective
natural transformation
ESY → Def Y /A2 .
Proof. Let Z i , sij , s0 represent an element in ESY (S) for some S. Let E i denote
the strict transform in Z = Z n of the total transform in Z i of the subscheme in
Z i−1 blown up to get Z i . Let D ⊂ Z be such that π∗ OZ (−D) = q, see chapter 3.
P
Then D =
ri Ei , with ri > 0 and the ri ’s are uniquely determined from Γ∗ . Let
P
D :=
ri E i , and define q := π ∗ O(−D) where π is the composition Z n → Z 0 . We
may assume S = Spec B, where B is a finitely generated C-algebra and where a
maximal ideal mB defines the central point. From chapter 3 we know that qn B/mrB
is B/mrB -flat for all n and r. From [AM69, 10.20] and [Mat86, 22.3] it follows that qn
n is flat over Spec B
is BmB -flat for all n. Thus Proj ⊕qBm
mB . It follows easily that
B
by restricting to an open U = Spec Bf ⊂ Spec B, we have that Y := Proj ⊕qBf is
flat over U. This defines in fact a natural transformation.
n
o
To prove injectivity, let Z i , sij , s0 and Z i , sij , s0 represents elements in
ESY (S), and assume that the construction above gives Y and Y , respectively. Assume that Y and Y represent the same element in Def Y /A2 . From Lemma 3.3.13 and
Proposition 4.5.15 we have a compatible sequence of isomorphisms Z ⊗B B/mnB '
Z ⊗B B/mnB , where Z = Z n and Z = Z n . Now let πi : Z i → Z 0 be the natural
map. Let qij = πi∗ mij , where mij defines the sections sij . Similarly define qij . From
Q
Lemma 4.3.9, we have that is Z is the blowup in a := qij and Z is the blowup
Q
in a = qij . We have an isomorphism B̂[x, y]/a ' B̂[x, y]/a, since they are complete with respect to mB . Note, that we abuse notation and denote also by a the
extension of a ⊂ B[x, y] in B̂[x, y], and similarly for the other ideals. Moreover,
the isomorphism takes qij to qij . Thus we find a map Spec B̂[x, y] → Spec B̂[x, y]
étale at V (a), mapping V (a) isomorphically to V (a) which also takes qij to qij .
The sections and simultaneous resolution may be uniquely constructed from qij and
n
o
n
o
qij . It follows Z i ⊗B B̂, sij ⊗B B̂, s0 ⊗B B̂ and Z i ⊗B B̂, sij ⊗B B̂, s0 ⊗B B̂ are
equivalent deformations. From Lemma 4.5.1 the conclusion follows.
Remark 4.5.17. We claim that Z = Z n as in the proof, is a a family of resolutions
for Y . For, in the notation of the proof, qOZ is invertible. In fact we claim that
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
115
qOZ = OZ (−D). We certainly have a natural inclusion qOZ ⊂ OZ (−D). To prove
that this is surjective, let K be the kernel of
OZ /qOZ → OZ /OZ (−D).
It follows from [Mat86, Th. 8.4] that K ⊗B BmB is coherent over BmB and that
OZ /OZ (−D) is BmB -flat. We know that tensoring over B by C the map above
induces an isomorphism. It follows that K ⊗B C = 0 and hence by Nakayamas
lemma K ⊗B BmB = 0. Since in fact K is of finite presentation, we may find f ∈ B,
f 6∈ mB such that K ⊗B Bf = 0. Thus we may assume K = 0. It follows from
this that there is a natural map Z → Y . By construction, this gives the minimal
resolution in each fiber.
Remark 4.5.18. The functor ESY is locally of finite presentation.
Remark 4.5.19. Let S = Spec A and let σ : S → S×A2 be an S-section. On ring-level
we have
σ∗
A → A[x, y] −→ A
where the first map is the natural inclusion and where the composition of the two
maps is the identity. Let m be the kernel of σ ∗ . It is clear that x ≡ a1 modulo m
and y ≡ a2 modulo m where a1 , a2 ∈ A, and it follows that m = (x − a1 , y − a2 ).
This means that equisingular deformations are locally trivial.
b be a Noetherian complete local C-algebra with maximal ideal
Lemma 4.5.20. Let A
m. Then the natural map
b → lim ESY (A/m
b n)
ESY (A)
←−
is a surjective.
b n ) be a compatible sequence of deformations. To every ξn
Proof. Let ξn ∈ ESY (A/m
there corresponds a section
(n)
s0
b n → Spec A/m
b n × A2 .
: Spec A/m
b n [x, y]. The inverse limit m
b⊗
ˆ C C[[x, y]].
b exist in A
These are defined by ideals m(n) ⊂ A/m
b Thus
b = (x − m1 , y − m2 ), where m1 , m2 ∈ A.
As in Remark 4.5.19 it follows that m
b y], and thus there is a section
b as an ideal in A[x,
we may view m
b → Spec A
b × A2 .
s0 : Spec A
b × A2 in this section to get Z 1 . Considering that this
Now we may blow up Spec A
is a locally trivial deformation of Z1 , a similar argument as just given, shows the
existence of sections
b → Z 1,
s1j : Spec A
b inducing
and the process may be repeated. Thus we have constructed a ξˆ ∈ ESY (A)
b n ) for every n. This shows the surjectivity.
ξn ∈ ESY (A/m
116
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
The functor ESX . We consider the functor ESX of [Wah76]. Since we are only
considering rational surface singularities, we may define ESX through simultaneous
resolutions, see [Wah76, Th. 5.6] for a review of this definition. Moreover, it is
clear that the definition of ESX on the category C of Artin local C-algebras, may be
extended in the same manner as for ESY .
Proposition 4.5.21. View ESX and Def X as functors on the category of germs in
the étale topology of schemes of finite type over C. Then there is an injective natural
transformation
ESX → Def X .
Proof. Note from the definition of ESX , that we have a forgetful map ESX → Def X .
The point is to show that a deformation X of X over S can not have two simultaneous
(Hironaka) resolutions. We may assume S = Spec A where A is a finitely generated
C-algebra. We may also assume that X = Spec B. In this setting, assume that we
have two simultaneous resolutions {X i , sij } and {X i , sij } of X. By composing with
an isomorphism, we may assume X 0 = X = X. Let π i : X i → X be the natural map,
and likewise π i . As for ESY , we may consider qij := π i∗ mij where mij defines sij . By
blowing up and taking strict transforms we may get {X i , sij } from qij . Likewise, we
consider qij . We may use the argument of [Wah76, Prop 1.12] and the vanishing result
[Wah75, Th. C], to find sequences φi : X i ⊗A A/mn → X i ⊗A A/mn of isomorphisms
over X ⊗A A/mn . These have to be unique, and take sections to sections. Taking
the limit, we then get that qij Bˆ = qij Bˆ, where Bˆ = lim B/mnA B. In particular we
←−
n B, m being the maximal ideal in B
get qij Bˆ = qij Bˆ, where now Bˆ = lim B/mB
B
←−
corresponding to the central singularity. From faithfully flatness of completion, we
get qij B mB = qij B mB . We may now find f 6∈ mB such that qij B f = qij B f . Now let
B → A be the map induced by the section s0 . The kernel of this map is m0 = q0 . Let
a ∈ A be the image of f. We claim a 6∈ mA . For assume a ∈ mA . Since f = f1 + a,
where f1 ∈ m0 , and since m0 + mA ⊂ mB this contradicts f 6∈ mB . By localizing
A in a, changing B with B ⊗A Aa , and A with Aa , we may assume that a ∈ A
is a unit. Thus we get an induced map B f → A which must be surjective with
kernel m0 B f . Thus B f /m0 B f ' A. This shows that Spec B f ⊂ Spec B is an open
neighborhood of V (m0 ). In the same manner we may by restricting Spec A assume
that Spec B f is an open neighborhood of V (m0 ). This shows that the two resolutions
are equivalent.
4.5.6
Equisingular deformations with sandwiching
Recall that a sandwiched singularity with sandwiching is a germ (Y, x) → (A2 , 0) in
the étale topology where Y → A2 is a sandwiched surface and x ∈ Y is the singular
point. We usually take an affine representative X = Spec B where B is a finitely
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
117
generated C-algebra. Thus we write (X, x) → (A2 , 0) for a sandwiched singularity
with sandwiching. Note the following.
Proposition 4.5.22. Let π : Y → A2 and π 0 : Y 0 → A2 be two sandwiched surfaces.
Assume that the corresponding maps (Y, x) → (A2 , 0) and (Y 0 , x0 ) → (A2 , 0) (where
x ∈ Y and x0 ∈ Y 0 are the singular points) viewed as germs in the étale-topology are
isomorphic in the sense that we have a commutative diagram
(Y, x) ←−−−− (E0 , e0 ) −−−−→ (Y 0 , x0 )
y
y
y
(A2 , 0) ←−−−− (E, e) −−−−→ (A2 , 0)
where the horizontal maps are étale. Then Y and Y are equivalent as in Definition
4.3.2.
Proof. The proof is not difficult but a little elaborate. To simplify notation we
consider neighborhoods in the analytic topology. Recall that an étale-map is locally
biholomorphic. By composing with a biholomorphic map, we may thus assume
that the germs (now in the analytic topology) (Y, x) and (Y 0 , x0 ) are isomorphic
over A2 . Taking representatives X and X,0 the isomorphism lifts to the minimal
e ' X
e 0 . Now, consider the exceptional sets E = ∪n Ei ⊂ Z and
resolutions: X
i=1
0
e
E 0 = ∪ni=1 Ei0 ⊂ Z 0 . Since the isomorphism is given over A2 we may in fact extend X
e 0 to neighborhoods of E \ E1 in Z \ E1 and E 0 \ E 0 in Z 0 \ E 0 , where E1 denotes
and X
1
1
the part of E which consist of components with selfintersection −1 and similarly for
E10 . Since Z \ E1 is isomorphic to Z1 \ {p1 , . . . , ps } where Z is the blowup of Z1
in {p1 , . . . , ps }, and similarly for Z10 , it follows from the fact that depth OZ,pi = 2
that we may uniquely extend to have an isomorphism of a neighborhood of E in Z
with an neighborhood of E 0 in Z 0 . This gives C[x, y]/q ' C[x, y]/q0 . From this one
deduces the conclusion, see Proposition 4.3.3.
From Proposition 4.5.28 there is a map ESY → ESX . Thus if Y represents
a deformation in the image of ESY (S) in Def Y /A2 (S), there is a singular section
σ : S → Y . Here S is a scheme of finite type over C. Recall also that Y comes with
a map π : Y → S × A2 , and a section σ0 : S → S × A2 . It is further clear that the
image of σ is mapped to the image of σ0 .
Definition 4.5.23. We define the functor
ESX/A2 : Schemes /C → Sets
by letting ESX/A2 (S) be the set of classes of diagrams
π
Y −−−−→ S × A2
x
x
σ0
σ
S
S
118
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
coming from ESY (S) as above, under the following equivalence. Two such diagrams
π
Y −−−−→ S × A2
x
x
σ0
σ
S
and
0
S
π0
Y −−−−→ S × A2
x
x
0
0
σ
σ
0
S
S
is equivalent if we have a commutative diagram
(Y , im σ)
πy
←−−−− (E, ∆) −−−−→
y
0
(Y , im σ 0 )
π0 y
(A2 × Spec A, im σ0 ) ←−−−− (F, D) −−−−→ (A2 × Spec A, im σ00 )
such that the horizontal maps are étale and where the upper maps map ∆ isomorphically to im σ and im σ 0 and the lower maps map D isomorphically to im σ0 and
im σ00 .
There is a transformation of functors ESY → ESX/A2 . We claim:
Proposition 4.5.24. View ESY and ESX/A2 as functors on the category of germs
in the étale topology of schemes of finite type over C. Then the transformation
ESY → ESX/A2
is an isomorphism.
Proof. The transformation is surjective by definition, we prove injectivity, so let
π
Y −−−−→ S × A2
x
x
σ0
σ
S
S
and
0
π0
Y −−−−→ S × A2
x
x
σ00
σ0
S
S
represent two elements coming from ESY (S) and representing the same class in
ESX/A2 (S). Here we may assume S = Spec A where A is a finitely generated Calgebra. We use notation as in the proof of Proposition 4.5.22, and use the notion
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
119
0
of analytic spaces to simplify the proof. Let Z and Z be the family of resolutions
0
0
0
0
of Y and Y , see Remark 4.5.17. Let E 1 , . . . , E n ⊂ Z and E 1 , . . . , E n ⊂ Z be as in
the proof Proposition 4.5.16. As in the proof of 4.5.22, we obtain a biholomorphic
0
map ψ : V → V where V ⊂ Z is open and contains the exceptional set except from
a part of the components E r , . . . E n such that the central fiber have self intersection
0
0
−1. Similarly for V ⊂ Z . Now we assume S = Spec A where A is a local Artin
C-algebra, and as in the proof of proposition 4.5.22, we get a biholomorphic map
0
ψ1 : Z 1 → Z 1 where Z is the blowup of Z 1 in a normally flat sections defined by a
0
0
sheaves of ideals mj and Z is the blowup of Z 1 in m0j . To conclude the proof in the
infinitesimal case, it is enough to show that (ψ1 )∗ mj = m0j . By symmetry it enough
to show one inclusion, so locally, let h ∈ mj H 0 (OW ) ⊂ H 0 (OW ) where W ⊂ W is
a sufficiently small neighborhood of ∪nj=r E j . Here we are identifying H 0 (OW ) with
H 0 (π1∗ OW ), where π1 : Z → Z 1 is the blowup in mj . Then the image h ∈ H 0 (OE j ),
0
0
j = r, . . . , n, is zero. Now h ◦ ψ −1 vanish on E j ∩ V . Also the image
h ◦ ψ −1 ∈ H 0 (OE 0 ) ' A
j
is a constant, hence 0. Thus h ◦
ψ −1
∈ ker(H 0 (OW 0 )
0
of ∪nj=r E j . From
0
→ ⊕H 0 (OE 0 )) = m0j H 0 (OW 0 ),
j
this we get an extension of ψ
where W is a open neighborhood
and this is easily seen to be unique. The proof may now be completed by reasoning
as in the proof of 4.5.16.
Extension of ESC to germs in the étale-topology. In [Wah74], Wahl defined
the infinitesimal equisingular deformation functor for plane algebroid curves. See
chapter 3 for a review of this definition. It is easy to extend his definition to arbitrary
base spaces. Let
C = Spec C[[x, y]]/(f )
be a plane curve singularity. We want a deformation functor
ESC : Schemes /C → Sets .
Let S be any scheme. Let Spec C → S be a point. Let F be a principal invertible sheaf of ideals on Spec OS [[x, y]] such that F is flat over S and such that
F ⊗OS C = (f ) in C[[x, y]]. This is a deformation of C. In oder for the deformation to be equisingular, we need a simultaneous embedded resolution. This
is analogous to the infinitesimal case. That is, we have normally flat sections
s0 : S → Spec OS [[x, y]], s1j : S → Z 1 , etc., such that successively blow ups yield an
embedded resolution of Spec OS [[x, y]]/(F ) as in the infinitesimal case.
We will say that two such deformations {F, s0 , s1j , . . . } and {F0 , s00 , s0ij , . . . } are
equivalent if there is a common étale neighborhood
0
(Spec OS [[x, y]], im s0 ) ←−−−− (E, F ) −−−−→ (Spec OS [[x, y]], im s00 )
120
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
of the images of the first sections such that ∗ F = 0 ∗ F0 and such that the embedded
resolutions agree when pulled back to E.
In [Wah74] it is proved for the infinitesimal case that the choice of embedded
resolution does not matter for the definition. It is also proved that the sections
are uniquely determined from the deformation of C. That is, the forgetful map
ESC → Def C is injective. We claim this holds more generally. We define the
extended Def C to be the functor of deformations of C, that is a principal F on
Spec OS [[x, y]] such that F is flat over S such that F ⊗OS C = (F ) in C[[x, y]] and
such that the set ∆ ⊂ V (F) where V (F) is not smooth, is finite over S. We impose
the following equivalence. Two deformations F and F0 are equivalent if there is a
common étale neighborhood
0
0
(Spec OS [[x, y]], ∆) ←−−−− (E, F ) −−−−→ (Spec OS [[x, y]], ∆ )
of the singular sets such that ∗ F = 0 ∗ F0 .
Theorem 4.5.25. View ESC and Def C as functors on the category of germs of
schemes in the étale topology of finite type over C. Then the forgetful map ESC →
Def C is injective.
Proof. Let S = Spec A where A is a C-algebra of finite type, and let {F, s0 , s1j , . . . }
and {F0 , s00 , s0ij , . . . } represent two elements in ESC (S). Assume that they give the
same class in Def C (S). Thus we have a common étale neighborhood (E, ∆) of the
singular sets. In particular, if we pull back to Spec ÔE,e , we get two embedded
resolutions of the pullback of V (F) (which equals the pullback of V (F0 ).) From the
results of [Wah74], the corresponding sections must agree. By faithfully flatness
they must agree on some Zariski-open U ⊂ E. Now, restricting S and E as in the
proof of 4.5.21, we get that {F, s0 , s1j , . . . } and {F0 , s00 , s0ij , . . . } induce isomorphic
equisingular deformations.
Remark 4.5.26. We will also consider algebraic plane curve singularities and equisingular deformations of such, that is equisingular deformations of
C 0 = Spec C[x, y]/(f ),
where C 0 is assumed to have an isolated singularity in the point corresponding to
(x, y). The definition of ESC 0 is clear, an embedded resolutions for such correspond
directly to an element in ESY . If Def C 0 is the deformation functor corresponding to
liftings of C 0 (with singular set ∆ finite over S) to S × A2 (S a base space) with
equivalence in étale neighborhoods of the singular sets, on germs of schemes of finite
type we also get an inclusion ESC 0 ⊂ Def C 0 .
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
4.5.7
121
Versality of equisingular deformations
We have defined the deformation functors ESY , ESX , ESC and ESC 0 . In a previous
section we proved that versality in the étale topology for the functors Def Z/A2 and
Def X/X
. We also have the following:
e
Theorem 4.5.27. Let F be one of the functors, ESC 0 , ESY or ESX . Let (S, ξ) be
a formally versal pair for F , where S is of finite type over C. Let S 0 be of finite type
over C, and assume ζ ∈ F (S 0 ). Then there is an étale neighborhood (E, e) → (S 0 , s0 ),
where s0 ∈ S 0 is the central point corresponding to ζ, and a morphism (E, e) → (S, s),
where s ∈ S is the central point corresponding to ξ, such that ξ and ζ induces the
same element in F (E).
Proof. We outline the proof, leaving the details to the interested reader.
The first step is to use Lemma 4.5.5. The next step is to show from this that
there is a map Spec ÔS 0 ,s0 → S such that the element ξˆ ∈ F (ÔS 0 ,s0 ) induced by ξ
under this map coincides with the element ζ̂ ∈ F (ÔS 0 ,s0 ) induced by the natural
map. For F = ESY one argues as in the proofs of Theorem 4.5.12, and Proposition
4.5.16. For F = ESX one argues as the proof of Theorem 4.5.13. For ESC 0 one
argues at the crucial point as in the proof of injectivity in Theorem 4.5.29.
4.5.8
Connections between the functors
Let f ∈ C[x, y],
C = Spec C[[x, y]]/(f ) and C 0 = Spec C[x, y]/(f ).
Assume that C is irreducible. Let Y = Y(C,a) , X = X(C,a) .
In chapter 3, we defined a map of functors
ESC → ESY ,
in the infinitesimal case. Above, we extended ESC and ESY , we now want to extend
the map. To do this, we consider the functors on the category of germs in the étale
topology of schemes of finite type over C. In this setting the extension is easily done.
Let S = Spec A, and let {F, s0 , s1j , . . . } represent a deformation in ESC (S). The
section s0 corresponds to an ideal m ⊂ A[[x, y]]. We know that m = (x − a1 , y − a2 )
where a1 , a2 ∈ A. So we may consider m as an ideal in A[x, y]. This defines a
normally flat section S → S × A2 . We blow up this section, and continue. In this
way we construct an element in ESY (S). It is also immediate, that we have a map
ESC 0 → ESY , where ESC 0 is as in Remark 4.5.26. Now note that there is a natural
transformation
Def Y /A2 → Def X .
122
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Thus from Proposition 4.5.16 there is a natural transformation
ESY → Def X .
Proposition 4.5.28. Consider Def Y /A2 , Def X , ESY and ESX as functors on the
category of germs in the étale topology of schemes of finite type over C. Let φ :
Def Y /A2 → Def X be as above. Consider ESY ⊂ Def Y /A2 and ESX ⊂ Def X . Then
ESY (S) = ξ ∈ Def Y /A2 (S) |φ(S)(ξ) ∈ ESX (S) .
Proof. Let S = Spec A be scheme of finite type over C. Let mA correspond to the
central point. Assume that ξ ∈ Def Y /A2 (S) such that φ(S)(ξ) ∈ ESX (S). Let Y
represent ξ. Let E1 , . . . En ⊂ Y be the exceptional in Y and let Er , . . . En be the
−1-curves among them. Let Y m = Y ⊗ A/mm
A . From the definition of ESX it follows
that there is a resolution Z m of Y m where to E1 , . . . , Er−1 lifts. (Recall that Def Z →
Def Xe is smooth.) The obstructions for lifting Er , . . . En sits in H 1 (NEi /Y ) = 0 so
also Er , . . . En lifts to Z m . From 3.3.13 any two candidates for Z m are isomorphic,
and this isomorphism must be unique. Thus from 3.3.11 we get a unique compatible
sequence of elements in ESY (A/mm
A ). From [Art74, lemma 2.2] there corresponds a
0
b From 4.5.1 we may by restricting S in the
unique family of resolutions Z of Y ⊗A ⊗A.
étale topology, assume that we have a unique family of resolutions Z of Y . From 4.5.5
we may as in the proof of 4.5.12 deduce that Z (after further restriction if necessary)
that Z is the pull back of the miniversal equisingular family of resolutions. From
this one deduces that Y represent an element in image of ESY (S) in Def Y /A2 (S).
Now let {Z i , sij } represent an element in ESY (S). From Remark 4.5.17 we know
that there is a map Z = Z n → Y , where Y is the image of {Z i , sij } in Def Y /A2 ,
such that this gives a family of resolution of the image. From the sections we get
0
exceptional sets E i in Z. Restricting Z we get a family of resolutions X of the image
X of {Z i , sij } in Def X (S). Now consider E i such that Ei = E i ⊗S Spec C contracts
to the singularity in X. From these we may as in the proof of Proposition 3.3.11 in
the infinitesimal case construct sections, which are normally flat in a neighborhood
of the special point in S. Normally flatness follows from normally flatness in the
infinitesimal case and the local criterion for flatness. Thus the image of ESY is
inside the image of ESX in Def X .
It follows from the proposition, that there is a map ESY → ESX .
Theorem 4.5.29. Let C, C 0 , Y = Y(C,a) and X = X(C,a) be as above. Assume that
C is irreducible. The maps
ESC 0 → ESY
and
ESY → ESX
4.5. LOCAL DEFORMATIONS IN THE ÉTALE TOPOLOGY
123
are surjective and isomorphisms for large a. By large a, we mean that a > a∗ , where
a∗ is fixed and determined from the topological type of C.
Before we may prove the theorem, we need some results in the formal case.
Proposition 4.5.30. Let S = Spec  where  is the completion of a finitely generated C-algebra. There exists an a∗ which depends only on the topological type of C,
(1)
(2)
such that if a ≥ a∗ and Y = Y(C,a) , and if {f 1 , s0 , . . . } and {f 2 , s0 , . . . } represent
two elements in ESC 0 (S) that under the map of functors
ESC 0 → ESY
maps to the same class, then there is a compatible sequence of infinitesimal auto(1)
(2)
morphisms φn : Â/mn [x, y] → Â/mn [x, y] taking f 1 to f 2 , s0 to s0 etc.
Proof. Let  be in Ĉ. The injectivity of
ESC → ESY
is already proven on tangent spaces, see Theorem 3.4.3, and is easily seen to hold
also for ESC 0 → ESY . Let C 1 = V (f 1 ) and C 2 = V (f 2 ) in Spec  ⊗ C[x, y]. Assume
(1) (1)
(2) (2)
that they induce deformations {Z i , sij } and {Z i , sij } representing the same
class in ESY (S).
Let A := Â/mn , let A → A0 be a small surjection with kernel () and assume
φ
by induction that there is an isomorphism of deformations C 1 ⊗ A0 −
→ C 2 ⊗ A0 . We
claim that we may lift this to am isomorphism C 1 ⊗ A → C 2 ⊗ A. By the results
in [Wah74], this will necessarily be compatible with the sections. In fact, we may
(since · mA = (0)) assume that φ(f 1 ) − uf 2 = g in A[x, y] where g ∈ C[x, y] and
u ∈ A is a unit. Here φ : A[x, y] → A[x, y] induces φ. Let q = q2 be the lifting of q
(2) (2)
corresponding to {Z i , sij }. Then we have φ(f 1 ), f 2 ∈ q, see Proposition 3.3.15. Let
e1 and C
e2 be the strict transforms of V (φ(f 1 )) and C 2 respectively. Since Z = Z (2)
C
m
(where m is the largest value of i) is a locally trivial deformation of Z, there is an
ei as given by elements
open affine U = Spec C[x0 , y 0 ] ⊂ Z so that we may consider C
fei in OZ (U )⊗A = A[x0 , y 0 ]. Reducing modulo () must give equality, so fe1 −ufe2 = h
for h ∈ C[x0 , y 0 ]. Let v ∈ A[x0 , y 0 ] define qOZ (U ). Recall A[x, y] ⊂ A[x0 , y 0 ] and that
fi defines the total transforms in A[x0 , y 0 ]. In A[x0 , y 0 ] this factors as a product of
an exceptional part and the strict transform. In our we case have φ(f 1 ) = fe1 v
and f2 = fe2 v. Thus g = hv. It follows that g ∈ q ∈ C[x, y]. But from Theorem
3.3.18 and proof of Theorem 3.4.3 we may assume that g represent 0 in TC1 . This
means that there exist an infinitesimal automorphism σ : C[, x, y] → C[, x, y]
such that σ (f + g) = f. From σ and φ we get an infinitesimal automorphism
σ : A[x, y] → A[x, y] so that σ(f 1 ) = uf 2 . This shows that we have an isomorphism
124
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
φ
of deformation C 1 ⊗ A → C 2 ⊗ A which lifts C 1 ⊗ A0 −
→ C 2 ⊗ A0 . Continuing this
argument we get an compatible sequence of isomorphisms C 1 ⊗ Â/mn → C 2 ⊗ Â/mn
which are necessarily compatible with the sections.
proof of Theorem 4.5.29. Note first that ESC 0 → ESY is surjective. This is easy to
see as follows. Let {Z i , sij } represent an element in ESY (S). The sections guarantees
that Z = Z n is locally trivial. As in the infinitesimal case, we may easily chose a
0∗
0
lifting C ⊂ Z of the total transform C 0 ∗ ⊂ Z. This defines a deformation C of C 0
which map to {Z i , sij }. In chapter 3 we proved in the infinitesimal case that this
gave a flat lifting of C 0 and normally flat sections. From the infinitesimal criterion
of flatness, we get (after restricting S if necessary) an element in ESC 0 (S).
Now we prove that the map ESC 0 → ESY is injective for large a. Let S = Spec A
be a scheme of finite type over C, and let {F, s0 , . . . } and {F0 , s00 , . . . } represent two
elements in ESC 0 (S). From Proposition 4.5.30 we have (after completing further) an
isomorphism
Â[[x, y]] → Â[[x, y]]
which takes the extension of F (identifying with an ideal) to the extension of F0 .
From Artins Approximation Theorem, see [Art69a, Cor. 2.6], it follows that we have
(Spec A[x, y], 0) ←−−−− (E, e) −−−−→ (Spec A[x, y], 0)
where 0 = (0, 0) ∈ Spec A[x, y] = S × A2 , 0 ∈ Spec A the central point and where
the maps are étale. Pulling back via Spec Â × A2 → Spec A × A2 , we get
0
(Spec Â[x, y], 0) ←−−−− (E , e) −−−−→ (Spec Â[x, y], 0).
where the maps are still étale. Now we have sections defined by m = (x−a1 , y−a2 ) ⊂
Â[x, y] and m0 = (x − a01 , y − a02 ) ⊂ Â[x, y] where a1 , a2 , a01 , a02 ∈ Â. Pulling back via
the sections, we get
0
(Spec Â[x, y], 0) ←−−−− (E , e) −−−−→ (Spec Â[x, y], 0).
x
x
x
Spec Â
00
←−−−− (E , e0 ) −−−−→
Spec Â
where the vertical maps are closed immersions and the horizontal maps are étale.
00
Now, since  is complete, it is easy to see that after restricting E if necessary, that
the two lower horizontal maps must be isomorphisms. This shows that {F, s0 , . . . }
and {F0 , s00 , . . . } induce the same element in ESC 0 (Â). From Theorem 4.5.1 it follows
that they agree in an étale neighborhood. This proves the injectivity of ESC 0 →
ESY .
We now prove the surjectivity of ESY → ESX . From Proposition 4.5.20 and
[Art74, Th 1.6] it follows that there is a scheme S of finite type over C and an
4.6. THE MODULI FUNCTORS
125
element ξ ∈ ESY (S) which is formally versal. From the smoothness of ESY → ESX
in the infinitesimal case, see Section 3.3.5, it follows that the image ζ in ESX (S)
is formally versal. Now let S 0 be another scheme of finite type over C and let
ξ 0 ∈ ESX (S 0 ). Then, after restricting in the étale topology, from Theorem 4.5.13 we
have a map S → S 0 such under ESX (S) → ESX (S 0 ), ζ 7→ ξ 0 . We have, of course, the
commutative diagram
ESY (S) −−−−→ ESX (S)
y
y
ESY (S 0 ) −−−−→ ESX (S 0 ).
So, if ζ 0 ∈ ESY (S 0 ) be the image of ξ, it is clear that ζ 0 maps to ξ 0 .
Lastly, we prove that ESY → ESX is injective for large a. Let S = Spec A
be a scheme of finite type over C, and let ξ and ξ 0 be two elements in ESY (S).
0
Assume that they map to the same element in ESX (S). Let Z and Z be the dee and X
e 0 be the induced (by
formations of Z corresponding to ξ and ξ 0 , and let X
restriction, use for instance an C 0e as above and consider Z \ C 0e) deformations of
e Since for large a, H 1 (Z, θ) = H 1 (X,
e θ) see Section 3.4.3, and the obstructions
X.
n
for lifting an isomorphism Z ⊗ A/m → Z ⊗ A/mn sits in H 1 (Z, θ) and hence
e 0 ⊗ A/mn lifts, we get a compatible see ⊗ A/mn → X
vanish since we know that X
0
quence φn : Z ⊗ A/mn → Z ⊗ A/mn of isomorphisms, see [Wah74, proof of 1.12].
From this one deduce, using the methods in the proof of proposition 3.3.14, that
these isomorphisms are compatible with a sequence of infinitesimal automorphisms
A/mn [x, y] → A/mn [x, y] which takes qn to q0n , where these ideals respectively defines are the images in A/mn [x, y] of uniquely determined ideals q and q0 . From this
we get
Â[x, y]/q ' Â[x, y]/q0 ,
since Â[x, y]/q and Â[x, y]/q0 are complete. This shows that the blowups in q and
q0 represent the same class in Def Y /A2 . By Proposition 4.5.16 it follows that ξ and
ξ 0 are equal.
4.6
The moduli functors
In this section we will define several moduli functors. These functors will be related
to the deformation functors discussed above. We will define Msur,Γ∗ , Mcom,Γ∗ , Msing,Γ
and Msand,Γ . These functors are related as will be shown in several propositions.
Note that all families in this section will be flat.
126
4.6.1
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Global equisingular families
Recall that Proposition 4.5.16 shows the existence of an injective natural transformation ESY → Def Y /A2 when viewing the functors as functors on the category of
germs in the étale topology of schemes of finite type over C. The proof shows actually
that there is a transformation of functors
ESY → Def Y
on the category of germs of schemes of finite type over C.
Definition 4.6.1. Let S be a scheme of finite type over C. An equisingular family
of sandwiched surfaces with dualgraph Γ∗ is a projective morphism Y → A2 × S of
finite type and a normally flat S-section σ : S → A2 × S such that
i) Y is flat over S
ii) for each Spec C → S the fiber Y ×S Spec C represents some Y(C,a) ,
for some plane curve singularity C, germed along the exceptional
set of Y(C,a) → A2 where Y(C,a) has dualgraph Γ∗
iii) for every point s ∈ S there exists an étale neighborhood (E, e) →
(S, s) and ξ ∈ ESY (E) (Y = Y×S Spec C(s)) such that if {Z, sij , s0 }
represents ξ and Y (recall that there is a natural map Y → E ×
A2 , see proof of Proposition 4.5.16) represents the image of ξ in
Def Y under the map ESY → Def Y then there is a common étale
neighborhood
(E × A2 , im σE ) ←−−−− (Es0 , F ) −−−−→ (E × A2 , im s0 )
such that Y ×S E ×E×A2 Es0 and Y ×E×A2 Es0 are isomorphic over
Es0 , where σE = σ ×S idE : E = S ×S E → S × A2 ×S E = E × A2 .
Remark 4.6.2. Remark that ii) and iii) above are not independent. We need however
both since the base space need not be reduced or connected.
Remark 4.6.3. It is easy to see that after composing Y → S × A2 with an automorphism, we may assume that the section σ : S → S × A2 is the trivial.
Proposition 4.6.4. Let Y → S × A2 be an equisingular family of sandwiched surfaces. Then there exist a (unique up to localization and automorphism of the target)
projective morphism π : Z → S × A2 with Z flat over S and a sequence {Zi , σij }ni=1
where σij : S → Zi are normally flat S-sections, Zi is the blow up of Zi−1 in the
sections σij , Z = Zn and σ0 is the trivial section such that for every Spec C → S,
Z ×S Spec C represent the minimal resolution of Y ×S Spec C, as a germ germed
along the exceptional set of π.
4.6. THE MODULI FUNCTORS
127
Proof. We will show the existence of sheaves of ideals Qnj , . . . , Q1j , Q0 on S ×A2 with
the following properties. The first sheaf of ideals Q0 determines the first section s0 ,
and the blowup of S × A2 is Z1 the strict transform of the Q1j to Z1 determines the
sections s1j and so on.
Consider the situation of point iii) in the definition of equisingular family. We
have a family of resolutions Z of Y . We have a composed map π : Z → Y →
E × A2 . (This last E is an étale neighborhood of a point s ∈ S and should be
distinguished from the exceptional set in Z.) The inverse image E of im s0 has
components E i . From these one construct divisors Dij such that π ∗ OZ (−Dij ) give
the sections corresponding to ξ in the definition of equisingular family of sandwiched
surfaces, see proof of Proposition 4.5.16. Pulling back to Es0 we get ZEs0 → YEs0 =
Y ×S E ×E×A2 Es0 . Let Dij be the pull backs of Dij , and let ψ be the composition of
E0
E0
ZEs0 → YEs0 and YEs0 → Es0 . We define Qijs := ψ∗ OZE0 (−Dij ). We claim that Qijs only
s
depends on YEs0 → Es0 . For if Z0Es0 → YEs0 also is gotten as ZEs0 , for each x ∈ Es0 an
infinitesimal argument, see lemma 3.3.13, shows that there is a compatible sequence
of YEs0 ⊗ OEs0 ,x /mn -isomorphisms Z0Es0 ⊗ OEs0 ,x /mn → ZEs0 ⊗ OE,x /mn . From this it
E0
E0
is clear that Qijs are uniquely determined on a Zariski-open of x ∈ Es0 . Thus Qijs
are uniquely determined. From Remark 4.6.3 we may assume that σ is the trivial
section. Then after performing the base change Spec C[x, y](x,y) → A2 , the Es0 give
E0
a covering of S × Spec C[x, y](x,y) in the étale topology. Thus Qijs give us sheaves on
S × Spec C[x, y](x,y) in the étale topology. But as we know, see [Knu71], this gives
sheaves in the Zariski-topology as well. Taking the ideal extension, we get sheaves
Qij of ideals on S × A2 . Flatness follows as in the proof of 4.5.16. Now blow up to
get Zi . The last assertion is now clear from the construction.
Let Y → S × A2 with section σ and Y0 → S × A2 with section σ 0 be two equisingular families of sandwiched surfaces with dualgraph Γ∗ . We will say that they are
equivalent if there is a common étale neighborhood
(S × A2 , im σ) ← (E, F ) → (S × A2 , im σ 0 )
such that Y ×S×A2 E and Y0 ×S×A2 E are isomorphic over E.
We now define the functor Msur,Γ∗ : Schemes of finite type /C → Sets .
Definition 4.6.5.
(
Msur,Γ∗ (S) =
Set of classes of equisingular families
Y → S × A2 with dualgraph Γ∗ .
Let Y → S × A2 be an equisingular family with dualgraph Γ∗ . We may assume
idS ×i
that σ is the trivial section. Consider the base change S × Spec C[[x, y]] −−−
−→
S × A2 where i is the map Spec C[[x, y]] → A2 = Spec C[x, y]. We will say that
128
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
b ×S×A2 S × Spec C[[x, y]] → S × Spec C[[x, y]] is an equisingular family of sandwich
Y
b → S ×Spec C[[x, y]] and Y
b0 → S ×Spec C[[x, y]]
surfaces as well. Two such families Y
are equivalent (assuming trivial sections) if there is a commutative diagram
b
Y
y
b0
Y
y
−−−−→
S × Spec C[[x, y]] −−−−→ S × Spec C[[x, y]]
where the horizontal maps are isomorphisms. We define
b sur,Γ∗ : Schemes of finite type /C → Sets
M
as the moduli functor of classes of such families. By definition, there is a surjective
map
b sur,Γ∗ .
Msur,Γ∗ → M
We claim:
Proposition 4.6.6. The natural transformation
b sur,Γ∗
Msur,Γ∗ → M
is an isomorphism.
Proof. Let Y → S × A2 and Y0 → S × A2 be to equisingular families with dualgraph
b → S × Spec C[[x, y]] and Y
b0 → S × Spec C[[x, y]] be
Γ∗ and trivial sections, and let Y
b and Y
b0 are isomorphic over S ×
obtained by base change as above. Assume that Y
Spec C[[x, y]]. We must show that Y → S × A2 and Y0 → S × A2 are equivalent. From
the lemma below, there are unique shaves of ideals Q and Q0 such that Y respectively
b'Y
b0
Y0 is the blowup of S ×A2 in Q respectively Q0 . These are such determined that Y
implies that there is an automorphism φ : S ×Spec C[[x, y]] → S ×Spec C[[x, y]] such
b =Q
b 0 where Q
b and Q
b 0 denotes the pull backs of Q and Q to S × Spec C[[x, y]].
φ(Q)
From this it is easy to find a common étale neighborhood
0
(S × A2 , Supp Q) ←
− (E, F ) −
→ (S × A2 , Supp Q0 )
such that ∗ Q = 0 ∗ Q0 . This implies that Y → S × A2 and Y0 → S × A2 are equivalent.
Lemma 4.6.7. In the notation of Proposition 4.6.4, there is a uniquely determined
sheaf of ideals OZ (−D) on Z such that Q := π∗ OZ (−D) has the following property:
Let YQ → S × A2 be the blowup of S × A2 . Then YQ → S × A2 and Y → S × A2 are
equivalent families.
4.6. THE MODULI FUNCTORS
129
Proof. The construction of Q from Z is as the construction of q from Z in the proof
of Proposition 4.5.16. Let YQ → S × A2 be the blow up of S × A2 in Q. From
the definition of equisingular family of sandwiched surfaces and from the proof of
Proposition 4.5.16, we know that for each s ∈ S, there is an étale neighborhood
(E, e) −
→ (S ×A2 , (s, 0)) (assuming trivial section) such that YQ ×S×A2 E and Y×S×A2
E are isomorphic over E. Moreover this isomorphism will be unique. This implies
that these isomorphisms may be glued together in order to give an equivalence of
the families YQ → S × A2 and Y → S × A2 .
Now consider two sheaves Q and Q0 of ideals as in the lemma. If YQ and YQ0
(notation as in the lemma) are equivalent families, the construction of Q and Q0 is
such that there exists a common étale neighborhood
0
(S × A2 , Supp Q) ←
− (E, F ) −
→ (S × A2 , Supp Q0 )
such that ∗ Q = 0 ∗ Q0 , see the proof of the last proposition. Thus we may consider
sheaves Q, of ideals of the type above, under this equivalence and define Mcom,Γ∗ as
the moduli functor of such classes. As functors, of course, Mcom,Γ∗ ' Msur,Γ∗ .
We will have to deal with equisingular families of curve singularities as well, so
in order to be precise, we make the following definition.
Definition 4.6.8. A flat family C ⊂ S × Spec C[[x, y]] together with a normally flat
section σ : S → C × S will be called an equisingular family of plane curves with
topological type Φ if
i) Each closed fiber is a curve singularity Spec C[[x, y]]/(f ) with topological type Φ.
ii) For every s ∈ S there is an étale neighborhood (E, e) → (S, s) such
that C ×S E represent a class in ESC×S Spec C(s) (E).
Note that the section σ necessarily agree with the sections given locally by the
definition of ESC×S Spec C(s) and that we after an automorphism of S × C may assume
that σ is the trivial section. Thus, assuming trivial sections, two equisingular families
C and C0 are equivalent if they are isomorphic over S.
Definition 4.6.9. We define
b curve,Φ : Schemes of finite type/C → Sets
M
by letting
(
b curve,Φ (S) =
M
Set of isomorphism classes of equisingular families C → S
of plane curve singularities with topological type Φ.
130
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
We may also define the functor Mcurve,Φ , of algebraic equisingular plane curve
singularities. The precise definition, is left to the reader.
Definition 4.6.10. Let S be a scheme of finite type over C. A flat family X → S
of finite type with a normally flat section σ : S → X, is called an equisingular
family of normal surface singularities with dualgraph Γ if the following conditions
are satisfied:
i) every fiber X ×S Spec C(s) for s ∈ S is of the form Spec B where B
is a normal two dimensional domain
ii) every fiber X ×S Spec C(s) has dualgraph Γ
iii) for every point s ∈ S there exists an étale neighborhood (E, e) →
0
(S, s) and ξ ∈ ESX (E) (X := X×S Spec C(s)) such that if {X i , sij , s0 }
represents ξ and X represents the image of ξ in Def X under the map
ESX → Def X then there is a common étale neighborhood
(X ×S E, im σE ) ←−−−− (Es0 , F ) −−−−→ (X, im s0 )
where σE = σ ×S idE : E = S ×S E → X ×S E.
Similar to Proposition 4.6.4, we also have the following proposition which proof
we leave to the reader.
Proposition 4.6.11. Let X → S be an equisingular family of normal surface sine → S factoring trough a
gularities with dualgraph Γ. Then there is a flat family X
e → X which gives the minimal resolution in each fiber such that
morphism π : X
the following holds. There is a sequence {Xi , σij } where Xi are schemes over S,
e it is only one section
σij : S → Xi are normally flat S-sections, X0 = X, Xn = X,
for i = 0, and Xi is the blowing up of Xi−1 in the sections σij .
Two equisingular families X1 → S and X2 → S of normal surface singularities
with sections respectively σ1 and σ2 are said to be equivalent if there is a common
étale neighborhood
(X1 , im σ1 ) ← (E, F ) → (X2 , im σ2 ).
Definition 4.6.12. We define
Msing,Γ : Schemes of finite type/C → Sets
by letting
(
Msing,Γ (S) =
Set of classes of equisingular families
X → S of normal surface singularities with dualgraph Γ.
4.6. THE MODULI FUNCTORS
131
Let X → S with section σ : S → X be an equisingular family of normal surface
b obtained by
singularities with dualgraph Γ. We may consider the formal scheme X
b
completing along the section σ. In this way we get a family X → S of formal schemes.
b → S and X
b 0 → S are equivalent if they are isomorphic as formal
Two such families X
b sing,Γ the corresponding moduli functor.
S-schemes. We denote by M
b sing,Γ , but we remark to the infinitesimal situation
We do not claim Msing,Γ ' M
that it is easy to prove that the natural transformation ESX → ESX̂ is an isomorphism. In fact, as the map on tangent spaces is surjective and since there is no
obstructions, the map will be smooth. The injectivity is clear on tangent spaces.
The proof that the map ESX (A) → ESXb (A) is injective is then by induction on
e 1 ⊗ A0 → X
e 2 ⊗ A0
the length of A, using that the obstruction to lift a morphism X
e
e θ) = H 1 (X̂, θ).
(A → A0 a small surjection) sits in H 1 (X,
Recall the notion of sandwiched singularities with sandwiching, see Definition
4.3.1. Let Y → S × A2 be a equisingular family of sandwiched surfaces with the
trivial section σ : S → S × A2 and with dualgraph Γ∗ . As in the proof of Proposition
4.5.28 we may use the family of resolutions in Proposition 4.6.4 to give a singular
section s0 : S → Y. We view Y → S × A2 as a germ in the étale topology along the
image of s0 . This will be called an equisingular family of sandwiched singularities
with sandwiching. We will usually take smaller representatives, and denote a family
of sandwiched singularities with sandwiching by (X, im s0 ) → (S × A2 , im σ). Thus
two equisingular families of sandwiched singularities with sandwiching (X, im s0 ) →
(S×A2 , im σ) and (X0 , im s00 ) → (S×A2 , im σ) are equivalent if there is a commutative
diagram
(X, im s0 )
←−−−− (E, F ) −−−−→ (X0 , im s00 )
y
y
y
(S × A2 , im σ) ←−−−− (E 0 , F 0 ) −−−−→ (S × A2 , im σ)
where the horizontal maps are étale. A fiber (X × Spec C(x), s0 (x)) → (A2 , 0) will
be a sandwiched singularity with sandwiching, and the corresponding sandwiched
singularity (forgetting the sandwiching) will have dualgraph Γ, where Γ is obtained
from Γ∗ by deleting vertices of weight −1 and the edges connecting these to the rest
of Γ∗ . Thus we will call a family (X, im s0 ) → (S × A2 , im σ) obtained as above for
a family of sandwiched singularities with dualgraph Γ.
Definition 4.6.13. We define Msand,Γ : Schemes of finite type/C → Sets by letting
Set of classes of equisingular families
Msand,Γ (S) =
(X, im s0 ) → (S × A2 , im σ) of sandwiched surface singularities
with sandwiching and with dualgraph Γ.
We will also fix the subfunctor Msand,Γ∗ which is the functor corresponding to
families of sandwiched singularities coming form sandwiched surfaces with a fixed
132
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
dualgraph Γ∗ . An equisingular family of sandwiched singularities coming from a
family of sandwiched surfaces with dualgraph Γ∗ will be called an equisingular family
of sandwiched singularities with sandwiching and with dualgraph Γ∗ . By definition,
there is a map Msur,Γ∗ → Msand,Γ∗ . In fact we have:
Proposition 4.6.14. The map
Msur,Γ∗ → Msand,Γ∗
is an isomorphism.
Proof. Assume that we have two equisingular families of sandwiched singularities
with sandwiching, (X, im s0 ) → (S × A2 , im σ) and (X0 , im s00 ) → (S × A2 , im σ)
obtained from the sandwiched surfaces Y → S × A2 and Y0 → S × A2 by restricting.
Then assume that we have a commutative diagram
(X, im s0 )
y
←−−−− (E, F ) −−−−→
y
(X0 , im s00 )
y
(4.6.1)
(S × A2 , im σ) ←−−−− (E 0 , F 0 ) −−−−→ (S × A2 , im σ)
where the horizontal maps are étale. One must show that Y → S × A2 and Y0 →
S × A2 are equivalent families. This may be done by extending 4.6.1 to the desired
isomorphism. The important fact in doing so is that from lemma 4.6.7 and the
universal property of blowing up, such extension will be unique. From 4.5.24, we get
the extension locally. By uniqueness these glue together, giving that Y → S × A2
and Y0 → S × A2 are equivalent families.
It is now clear that
Msand,Γ (S) ' ∪Γ⊂Γ∗ Msand,Γ∗ (S).
where ∪Γ⊂Γ∗ denotes the finite union over all possible embeddings Γ ⊂ Γ∗ such that
v(Γ∗ ) \ v(Γ) is set set of vertices in Γ∗ of weight −1 and where Γ∗ is the graph of
Y(C,a) for some C and a.
The five moduli functors introduced classify the objects given by their values on
4.6. THE MODULI FUNCTORS
133
the point:
Msing,Γ ({∗}) =
Isomorphism classes of normal surface singularities
with dualgraph Γ.
Msand,Γ ({∗}) =
Isomorphism classes of sandwiched surface singularities
with sandwiching and with dualgraph Γ.
Msand,Γ∗ ({∗}) =
Isomorphism classes of sandwiched surface singularities
with sandwiching and with (extended) dualgraph Γ∗ .
Msur,Γ∗ ({∗}) =
Isomorphism classes of sandwiched surfaces
with dualgraph Γ∗ .
Mcom,Γ∗ ({∗}) =
Isomorphism classes of complete ideals
with dualgraph Γ∗ .
Mcurve,Φ ({∗}) =
Isomorphism classes of plane curve singularities
with topological type Φ.
4.6.2
Relating the global families
We now claim that there are transformations of functors
Mcurve,Φ → Msur,Γ∗ → Msand,Γ∗ → Msing,Γ
where Φ is a topological type for a plane curve singularity that gives rise to Γ∗ and
Γ as described in Section 4.3. Here the last map is just forgetting the morphism
from X to S × A2 . The proof showing that this gives a family in Msing,Γ relies on
an argument as in the proof of Proposition 4.5.28 using the family of resolutions
in Proposition 4.6.4 when remembering that Msur,Γ∗ → Msand,Γ∗ is surjective by
definition. In order to describe the first map, we need:
Proposition 4.6.15. Let C → S be an equisingular family of plane curve singularities. Then after an automorphism of C → S there is a an embedded resolution of the
b σij }n , of schemes Z
b i and normally
family in the sense that there is a sequence {Z,
i=0
b
b
flat sections σij : S → Z such that Z0 = S × Spec C[[x, y]], there is only one section
b i+1 is the blowup
σ0 = σ01 for i = 0 which may be taken as the trivial section and Z
b i in the sections σij . This family gives locally the embedded resolution, needed
of Z
for equisingularity.
Proof. From Section 4.5.8, the result holds locally on S. One may then argue along
the same lines as in the proof of 4.6.4.
Now let S be a scheme of finite type over C, and let let C → S be a family of
plane curve singularities. From the simultaneous embedded resolution given from
134
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
b on
the proposition, we may as in the proof of Lemma 4.6.7, get a sheaf of ideals Q
2
b
S × A . Blowing up this gives an element in M
sur,Γ* (S). Trough the isomorphism
b
M
* ' M
* we get an element in M
* (S). This correspondence gives the
sur,Γ
sur,Γ
sur,Γ
natural transformation Mcurve,Φ → Msur,Γ∗ . Lastly we claim:
Proposition 4.6.16. The map Mcurve,Φ → Msur,Γ∗ is surjective.
Proof. Consider the family of resolutions Z → S of a family Y → S as in 4.6.4. Then
clearly we may choose a family of curves C̃ ⊂ Z whose irreducible components are
transversal to the “last” Ei ’s in the blowup three for Z. This maps to a C ⊂ S × A2 ,
which gives us Y → S by the construction above. Flatness of C follows from flatness
in the infinitesimal case.
Remark 4.6.17. We have seen, see Proposition 4.5.29, that we have a surjective map
ESY → ESX . However, we do not know if the map Msur,Γ∗ → Msing,Γ∗ is surjective.
The proof in the local case depends on the fact that −1-curves in a smooth scheme
always lifts to local deformations.
On the other side it will turn out that if there exists coarse moduli spaces Msur,Γ∗
and Msing,Γ the corresponding map Msur,Γ∗ → Msing,Γ will be surjective. Moreover,
for large a, this will be an isomorphism
Later in this article we will try to find coarse moduli spaces for the functors
introduced in this section. The work of Laudal and Pfister, see [LP88] indicates
that the introduced functors are “to big”. The next section introduce the restriction
of the functors to τ -constant families.
4.6.3
Restriction of the functors to τ -constant families
In this subsection we introduce the notion of τ -constant families, and define some
restricted moduli functors.
Let Y be a sandwiched surface and let Z be the minimal resolution. Then let
τZ = dimC Def Z (C[]) = dimC H 1 (Z, θ).
e is the minimal resolution, we let
If X is a sandwiched singularity and X
e θ).
τXe = dimC Def Xe (C[]) = dimC H 1 (X,
A family of sandwiched surfaces will be said to be τZ -constant, if the corresponding
family of resolutions Z → S has τZs constant, and likewise for sandwiched singularities. If the base space of such family is reduced, it is clear what this means, but for
non-reduced base spaces, we will have to define τ -constancy more carefully. Thus,
to be precise, let Y → S represent an element in Msur,Γ∗ (S) and let π : Z → S be
4.7. THE KODAIRA-SPENCER MAP AND ITS KERNEL
135
the corresponding family of resolutions, see Proposition 4.6.4. Then Y → S is said
to represent an element in Mτsur,Γ∗ (S) if and only if R1 π∗ θZ/S is S-flat. Further, a
family X → S in Msing,Γ (S) is in Mτsing,Γ (S) if and only if, for the from Proposie → S, R1 π∗ θ e is S-flat. Finally we define Mτ
tion 4.6.11 existing π : X
∗ and
X/S
com,Γ
Mτsand,Γ∗ trough the isomorphisms with Msur,Γ∗ and Mcom,Γ∗ , see Proposition 4.6.14.
It is perhaps not clear that we have chosen the correct notion of τ -constancy.
Since we consider equisingular families, we would prefer constancy of the equisingular
number of moduli as the notion of τ -constancy. But the next lemma shows that this
is equivalent to the chosen definition.
Lemma 4.6.18. Let π : Z → S be a family of resolutions of an equisingular family
of sandwiched surfaces (proposition 4.6.4) with exceptional set E = ∪Ei (resp. π :
e → S a family of resolution of a family of sandwiched singularities with exceptional
X
set E = ∪Ei .) Then R1 π∗ θZ/S (log E) is S-flat if and only if R1 π∗ θZ/S is S-flat (resp.
1
R1 π∗ θX/S
is S-flat.)
e (log E) is S-flat if and only if R π∗ θX/S
e
Proof. We will give the proof in the case of sandwiched surfaces. The proof in the
case of sandwiched singularities is similar.
From [Har77, Th. 8.8] R1 π∗ θZ/S (log E) and R1 π∗ θZ/S are coherent. By the local
criterion of flatness, we may assume that S = Spec A, where A is an Artin local
C-algebra. It is easily seen that there is an exact sequence
0 → θZ/S (log E) → θZ/S → OEi (Ei ) → 0.
The proof is similar to [Wah76, Prop. 2.2] using that Z is locally trivial over S.
From [Wah76, 0.4.2 and 2.3], we get
0 → H 1 (Z, θ(log E)) → H 1 (Z, θ) → ⊕H 1 (Z, OEi (Ei )) → 0,
and we claim that H 1 (Z, OEi (Ei )) are always flat. In fact, if Z denote the closed fiber
with exceptional components Ei , then, since H 1 (Z, OEi (Ei )) = H 2 (Z, OEi (Ei )) = 0
it follows from [Wah76, Th. 0.4] that H 0 (Z, OEi (Ei )) is A-flat. From [Wah76, lemma
0.2.1] it then follows that H 1 (Z, θ(log Ej )) is S-flat if and only if H 1 (Z, θ) is Sflat.
4.7
The Kodaira-Spencer map and its kernel
As foundation for our study of the introduced moduli problems, we want to use the
framework developed in [LP88]. Here one studies a certain global Kodaira-Spencer
map corresponding to a family, and one tries to interpret the kernel as the Liealgebra of vector fields along which the family is trivial. However this interpretation
of the Kodaira-Spencer kernel (even in the local case) does not hold in general,
136
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
so they impose certain conditions. The applications given in [LP88] are concerned
with hypersurface singularities, and the conditions they impose are clearly satisfied
in this case. In our case, however, it is not so clear that these conditions are satisfied,
and one of the purposes of this section is to show that this is in fact the case. We
verify the conditions separately for sandwiched surfaces and sandwiched singularities
separately, although the verification in the case of sandwiched surfaces is more or
less contained in the arguments regarding sandwiched singularities.
After verifying the conditions, we go on to study the kernel of the KodairaSpencer map as defined in [LP88]. For sandwiched surfaces we are able to give a
concrete description of the Kodaira-Spencer map which is suitable for concrete calculations. We lack, however, such description for families of sandwiched singularities,
but nevertheless we are able to derive some connections also in this case.
We are going to apply the theory in [LP88] to detect trivial subfamilies of families
of sandwiched surfaces and sandwiched singularities.
Recall that ESY ⊂ Def Y /A2 , see Proposition 4.5.16 viewed as functors on germs
of schemes of finite type over C in the étale topology. It follows from the proof
of Proposition 4.5.16 that we also have ESY ⊂ Def Z/A2 . Recall also that on the
category C we have Def Z ' Def Z/A2 , see Proposition 4.5.15. Similarly we have
ESX ⊂ Def X and ESX ⊂ Def X/X
, see Proposition 4.5.21 and its proof.
e
It is now clear that we equivalently may search for the trivial subfamilies of
families of resolutions. In fact, it turns out that it is most convenient to consider
resolutions of sandwiched surfaces and sandwiched singularities as our objects, so in
order to use [LP88], we take this as our viewpoint.
4.7.1
The conditions in [LP88] for sandwiched surfaces
In the introduction of [LP88, Ch. 3] the authors give three conditions (A1 , V 0
and A2 ) which guarantees the full power of the theory. We will verify that these
conditions are satisfied also for the application we have in mind.
Let Z be a minimal resolution of a sandwiched surface Y. The condition A1 is
the existence of an algebraization of the formal moduli for the deformation functor
Def Z/A2 . It follows from Corollary 4.5.10 that there exists an algebraization of the
formal moduli, and thus that the condition A1 is satisfied.
The condition V 0 is formulated under the assumption that A1 is satisfied. So
let Z → S be an algebraization of the formal (mini-)versal family for Z. We may
of course assume that S is affine, equal to Spec A for a finitely generated C-algebra
A. Before we may formulate the condition properly, we must shortly recall the generalized André-Quillen cohomology. So recall that to the morphism Z → S there
i
are (hyper) cohomology groups TiZ/S . Recall also that there are sheaves TZ/S
and a
4.7. THE KODAIRA-SPENCER MAP AND ITS KERNEL
137
“global-local” spectral sequence
q
H p (Z, TZ/S
) ⇒ TnZ/S .
q
Now since we may assume that Z is smooth over S we know that TZ/S
= 0 for
q > 0, and since
0
= θZ/S := Hom(ΩZ/S , OZ ),
TZ/S
we see that TiZ/S = H i (Z, θZ/S ). We are now in the position to formulate the conditions V 0 of [LP88]. They are:
i) S is smooth.
ii) TiZ/S is a finitely generated OS -module.
iii) TiZ/S is OS -flat for i ≥ 2.
Since the deformation functor Def Z is smooth, we may assume that S is smooth.
The two other conditions above are contained in the following lemma.
Lemma 4.7.1. Let π : Z → S be as above. Then H 1 (Z, θZ/S ) is a finitely generated
A-module and H i (Z, θZ/S ) = 0 for i ≥ 2.
Proof. We prove first that H 2 (Z, θZ/S ) = 0. Let s ∈ S and denote by Zs the fiber
in this point. Since H 2 (Zs , θ) = 0, it follows (see for instance [Wah76, 0.4.2]) that
H 2 (Z s , θZ s ) = 0 for all deformations Z s of Zs . Thus from the theorem of formal
functions it follows that (R2 π∗ θZ/S ) b = 0 where (R2 π∗ θZ/S ) b = 0 denotes the
limit of R2 π∗ θZ/S ⊗ A/mn = 0 where m is any maximal ideal. Thus we know that
H 2 (Z, θZ/S ) = 0. Similarly, H i (Z, θZ/S ) = 0 for all i ≥ 2.
Recall (proposition 4.5.10) that π : Z → S comes from a morphism f : Z →
S × A2 which is the blowup in some sheaf of ideals a such that A[x, y]/a is a finitely
generated A-module. From [Har77, Prop. 8.8] M = R1 f∗ Z, θZ/S = H 1 (Z, θZ/S ) is
a finitely generated A[x, y]-module. Clearly Supp M ⊂ V (a). Thus we know that
an M = 0 for some n. It follows that M = H 1 (Z, θZ/S ) is a finitely generated Amodule.
We turn now to the condition denoted by A2 in [LP88]. Let as above π : Z → S
be an algebraization of formal moduli. From [LP88, Ch. 3] we may, by restricting if
necessary, assume that this family is formally versal in every point. The condition
A2 is versality in the étale topology which follows Theorem 4.5.12.
138
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
4.7.2
The conditions in [LP88] for sandwiched singularities
In order to detect trivial subfamilies of equisingular families of sandwiched singularities, we will consider the corresponding family of resolutions, see proposition 4.6.11.
e of a sandwiched singularity X,
Thus we will consider families of the resolution X
and the corresponding Kodaira-Spencer maps. Also in this case, it is a priori not
clear that the conditions (A1 , A2 , V 0 ) of [LP88] are satisfied. The aim of this section
is to verify this.
From Corollary 4.5.10 that the condition A1 is satisfied for Def X/X
, so assume
e
e
e
that π : X → S is an algebraization of the formal versal family of X. Then the
conditions denoted by V 0 are in the present case the following:
i) S is smooth.
ii) Tie
is a finitely generated OS -module.
iii) Tie
is OS -flat for i ≥ 2.
X/S
X/S
Since the deformation functor Def Xe is smooth, we may assume that S is smooth.
The two other conditions are contained in the following lemma.
e → S may be chosen
Lemma 4.7.2. In the notation above, the algebraization π : X
e θ e ) is a finitely generated A-module and H i (X,
e θ e ) = 0 for
such that H 1 (X,
X/S
X/S
i ≥ 2.
e θ e ) = 0 for i ≥ 2 one may copy the proof of Lemma
Proof. To prove that H i (X,
X/S
e θ e ) is a
4.7.1, and it follows from Proposition 4.7.9 and Lemma 4.7.1 that H 1 (X,
X/S
finitely generated A-module.
We have verified A1 and V 0 , and A2 follows from Theorem 4.5.13.
4.7.3
The Kodaira-Spencer map for sandwiched surfaces
As previously indicated we consider families Z → S of resolutions of sandwiched
surfaces rather than families of the surfaces themselves. Assume now that η : Z → S
is a family of resolutions of an equisingular family of sandwiched surfaces. We will
assume that the base space of the family S = Spec A is affine, since this assumption
is also made in [LP88]. Moreover we may assume that A is a finitely generated
C-algebra. The Kodaira-Spencer map for such a family
gη : θS → H 1 (Z, θZ/S )
is defined in [LP88, Def. 3.1]. Because of the verification done in Section 4.7.1, we
have the following corollary of the theory in [LP88, Ch. 3]:
4.7. THE KODAIRA-SPENCER MAP AND ITS KERNEL
139
Theorem 4.7.3. Let η : Z → S be a flat family of resolutions of an equisingular
family of sandwiched surfaces. Assume that S is smooth. Let V ⊂ θS be the kernel
of gη . Then
1. V is a sub-Lie-algebra of θS .
2. The integral manifolds for V gives the locally trivial subfamilies.
Remark 4.7.4. The integral manifolds of V are smooth subschemes of S, see [LP88,
p. 47].
Remark 4.7.5. Note that we cannot use the classical work of Kodaira and Spencer
for two reasons. Firstly, our manifolds are not compact. Secondly, we do not know
that h1 (Zt , θ) is constant. In fact, h1 (Zt , θ) is not constant, and the stratification of
S with respect to this property will not give smooth base spaces as required in the
work of Kodaira and Spencer.
We proceed to give a concrete description of the Kodaira-Spencer kernel for an
equisingular family of sandwiched surfaces.
Theorem 4.7.6. Let η : Z → S be the resolution of any equisingular family Y → S
of sandwiched surfaces such that S = Spec A is affine, reduced and of finite type.
Assume that Y is the blowup in Q determined from Z → S as in Lemma 4.6.7 and let
F ∈ Q ⊂ A[x, y], be a sufficiently general element. Then the kernel V of gη coincide
with the kernel of the map
DerC (A) → A[x, y]/(
∂F ∂F
,
) + Q.
∂x ∂y
given by
D 7→ D(F ).
Proof. Let V0 denote the kernel of the map defined in the proposition. Now let
s ∈ S. We know from [LP88, Prop. 3.2] that gη ⊗ C(s) is the composition of the
natural map
DerC (A) ⊗ C(p) → TS,s
(where TS,s denotes the Zariski tangent space) and the natural map
TS,s → Def Z⊗C(s) (C[]).
Since the family is equisingular, this last map factors
TS,s → ESY⊗C(s) (C[]) → Def Z⊗C(s) (C[])
where the last map is injective. Since Y is constructed from C according to Section
4.6.2, we further know that the map
TS,s → ESY⊗C(s) (C[])
140
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
factors
TS,s → ESC⊗C(s) (C[]) → ESY⊗C(s) (C[])
where C denotes the family of curves defined by F. It is also clear from [LP88, Ch.
3] and Theorem 3.3.18 that the map defined in the proposition factors
DerC (A) ⊗ C(p) → TS,s → ESC⊗C(s) (C[]) → ESY⊗C(s) (C[])
where the maps are the same as above. Thus we have V ⊗ C(s) = V0 ⊗ C(s) for all
closed s ∈ S. One now proves that a vector field δ ∈ V0 which is not in V must have
coefficients in the Jacobsen radical of A. Since A is reduced it follows from [Mat86,
Th. 5.5] that the Jacobsen radical is zero.
4.7.4
The Kodaira-Spencer map for sandwiched singularities
As for sandwiched surfaces, we consider families of resolutions of sandwiched singue → S be a family of resolutions corresponding to an equisingular
larities. Let η : X
family of sandwiched singularities, see Proposition 4.6.11. Then there is a corresponding Kodaira-Spencer map:
e θ e ).
gη : θS → H 1 (X,
X/S
From [LP88, Ch. 3], we have the following:
e → S be a flat family of resolutions of an equisingular
Theorem 4.7.7. Let η : X
family of sandwiched singularities. Assume that S is smooth. Let V ⊂ θS be the
kernel of gη . Then
1. V is a sub-Lie-algebra of θS .
2. The integral manifolds for V gives the locally trivial subfamilies.
Furthermore, we have:
e → S be a family of resolutions of an equisingular family
Lemma 4.7.8. Let ηe : X
of sandwiched singularities coming from a family of sandwiched surfaces, as Section
4.6.2. Let η : Z → S be the corresponding family of resolutions of sandwiched
surfaces. Then
e θe )
gηe : θS → H 1 (X,
X/S
is the composition of
gη : θS → H 1 (Z, θZ/S )
and the natural map
e θ e ).
H 1 (Z, θZ/S ) → H 1 (X,
X/S
4.7. THE KODAIRA-SPENCER MAP AND ITS KERNEL
141
Proof. This follows from the definition of the Kodaira-Spencer map, see [LP88, Def.
3.1].
In the notation above we also have:
e → S be a family of resolutions of an equisingular
Proposition 4.7.9. Let ηe : X
family of sandwiched singularities coming from a family of sandwiched surfaces,
as in Section 4.6.2. Let η : Z → S be the corresponding family of resolutions of
sandwiched surfaces. Assume that S is smooth. Then there is an exact sequence
e θ e ) → 0.
0 → H 1 (Y, θY/S ) → H 1 (Z, θZ/S ) → H 1 (X,
X/S
Proof. From Lemma 4.6.7 π : Z → Y. Then from the Leray Spectral sequence and a
vanishing argument similar to the proof of 4.7.1, we have
e θ e ) → 0.
0 → H 1 (Y, π∗ θZ/S ) → H 1 (Z, θZ/S ) → H 1 (X,
X/S
It is easily seen that in our situation we have a natural inclusion
π∗ θZ/S ⊂ θY/S .
In the proof of [BW74, Prop. 1.2] it is shown that the cokernel is zero on each closed
fiber. Since S is reduced this means that the cokernel is zero, so π∗ θZ/S = θY/S .
e → S be a family of resolutions of an equisingular
Corollary 4.7.10. Let ηe : X
family of sandwiched singularities coming from a family of sandwiched surfaces,
as in Section 4.6.2. Let η : Z → S be the corresponding family of resolutions of
sandwiched surfaces. Now let gη be the Kodaira-Spencer map corresponding to the
family η and let Vsing be the kernel of the Kodaira-Spencer map gηe corresponding to
the family ηe. Then
Vsing = gη−1 (H 1 (Y, θY/S )) ⊂ θS .
Proof. This follows form the proposition above and Lemma 4.7.8.
The problem is, however, that H 1 (Y, θY/S ) in general is rather difficult to compute. An other possibility for computation of Vsing is to observe the following:
Proposition 4.7.11. Assume that S is smooth, reduced and of finite type. Let
e→S
η : X → S be an equisingular family of sandwiched singularities, and let ηe : X
be the corresponding family of resolutions, see Proposition 4.6.11. Then the kernel
of the Kodaira-Spencer map
e θe )
gη : θS → H 1 (X,
X/S
coincides with the kernel in the Kodaira-Spencer map
1
gη : θS → TX/S
.
142
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Proof. The result is clear on each closed fiber, since ESX⊗C(s) is a subfunctor of
Def X⊗C(s) . Since S is reduced the result follows.
4.7.5
The Kodaira-Spencer kernel and coarse moduli spaces
In this subsection we will shortly recall the notion of coarse moduli spaces and how
the Kodaira-Spencer kernel is related to the problem of finding coarse moduli spaces.
Definition 4.7.12. Let
M : Schemes /C → Sets
be a functor. A scheme M together with a natural transformation
φ : M → HomSch (−, M )
is called a coarse moduli space if
i) φ(Spec C) : M(Spec C) → HomSch (Spec C, M ) is a bijection.
ii) If Z is any scheme and if ψ : M → HomSch (−, Z) is a natural
transformation, then there exist a unique morphism γ : M → Z
such that if γ
e : HomSch (−, M ) → HomSch (−, Z) is the natural
transformation induced by γ, then ψ = γ
e ◦ φ.
We will be concerned with the existence of coarse moduli spaces for the functors
introduced in this article. This will be the restricted functors introduced in section
4.6.3. Our method will be to find families with locally (in the étale topology) versality property, and identify a group action on this family which identify isomorphic
fibers. This action will be closely related to the Kodaira-Spencer kernel.
We will consider families which contains all the object we want to classify. Let S
be the base space of such a family. From the previous subsections we know that we
have the action of the Kodaira-Spencer kernel V on S. Note the following remarks.
Remark 4.7.13. Let S = ∪Sτ be the decomposition of S in to τ -constant stratas.
This is the flattening stratifications of a cohomology module. The stratas Sτ are
invariant under the action of V, see [LP88, Ch. 3].
Remark 4.7.14. Assume that U ⊂ Sτ is a subset invariant under the action of V,
and assume that the action of V identifies isomorphic fibers. Assume further that
there is a geometric quotient M of U under the action of V. Then if there is a family
over a base space S 0 locally induced from the family over U then there is a unique
morphism S 0 → M. This is due to the properties of the quotient, see [New78] and
[LP88, Prop. 3.24]. This is the basic observation needed for our spaces to be coarse
moduli spaces.
4.8. MODULI SPACES
4.8
143
Moduli spaces
The objects of this section are sandwiched surface singularities with sandwiching,
and the corresponding equisingular moduli functor is Msand,Γ∗ . These are sandwiched
singularities with sandwiching coming from a sandwiched surface with dualgraph Γ∗ .
From Proposition 4.6.14 and Lemma 4.6.7, they may equivalently be thought of as
sandwiched surfaces or complete ideals. We will however take the view of sandwiched
singularities with sandwiching.
Sandwiched singularities with sandwiching are very natural objects to study.
Since a sandwiched surface singularity is a surface singularity which dominates a
smooth surface, it comes with an extra structure: There is a birational morphism
to a smooth surface. This being the defining property of a sandwiched surface
singularity, it is natural to consider it as a part of the studied object. Moreover,
it turns out that the “forgetful map” which forgets the morphism is rather difficult
to understand. We will turn to this problem in the next section. In this section
we will from now on use the term sandwiched singularity for objects in
Msand,Γ∗ ({∗}). When we talk about dual graphs of such objects, we will
always mean the graph Γ∗ . This will make notation easier.
The results of this section, are divided in two parts. The first part are general
results about any primitive sandwiched singularity, that is, sandwiched singularities
corresponding to a dualgraph which has Γ∗ as only one vertex of weight −1. The
other part is concerned with primitive sandwiched singularities of quasihomogeneous
type.
In the general case we do not prove the existence of coarse moduli spaces, but we
prove the existence of a parameterizing space and a group action on this space such
that the orbits classify the isomorphism classes. The motivation for such results are
[Spi90b] and the fact that any coarse moduli space must be a geometric quotient
under such group action.
In the second part of this section, we specialize to the case of quasihomogeneous
type. This is a natural assumption to make, since the presence of a grading make
calculations easier, and in the quest for moduli spaces of plane curve singularities,
the first results where also obtained under this assumption, see [LP88].
4.8.1
Classifying spaces and isomorphism classes
In this section we prove, for a given dualgraph Γ∗ , the existence of an S and a family
in Msand,Γ∗ (S) such that all equisingular families are locally (in the étale topology)
pull back of this family. Moreover, we identify a Lie-algebra of derivations V such
that the isomorphism classes of sandwiched singularities with dualgraph Γ∗ are in
one to one correspondence with the maximal integral manifolds for V.
144
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
The corresponding fact for plane curves is already known, see [Had96], and we
use this fact in the proof.
Theorem 4.8.1. Let Φ be the semigroup of an irreducible plane curve singularity.
Let for each a ∈ N, Γ∗a be the dualgraph corresponding to sandwiched singularities
coming from curves with semigroup Φ.
There is a scheme SΦ and a family in Msand,Γ∗ (SΦ ) such that, for each a, all
equisingular families of sandwiched singularities (with sandwiching) and dualgraph
Γ∗a are locally (in the étale topology) pull back of this family. For each a, there
is Lie-algebra V = Va of derivations on SΦ such that the corresponding maximal
integral manifolds are in one-to-one correspondence with sandwiched singularities
having dualgraph Γ∗a .
Proof. To make notation easier we take the view of sandwiched surfaces. We may
take the family of curves, C → SΦ = Spec A as in [Had96], see [Had96, p. 72].
Then SΦ is open and smooth in Am , for some m. The family C → SΦ contains all
irreducible plane curve singularities with semigroup Φ, and the family is equisingular and formally versal in each point. As remarked in [LP88] such family will
be (equisingular) versal in the étale topology. From Section 4.6.2 we have a corresponding family Y → SΦ of sandwiched surfaces, and by Proposition 4.5.29, this
family is locally versal in the étale topology as required. Let V be the kernel of the
corresponding Kodaira-Spencer map:
DerC (A) → H 1 (Z, θZ/SΦ ),
where Z is the family of resolution corresponding to Y → SΦ , see Proposition 4.6.4.
Let VC be the Kodaira-Spencer kernel corresponding to the family C → SΦ . From
Proposition 4.7.6, it is clear that VC ⊂ V.
Assume now that s1 , s2 ∈ SΦ are two points over which the fibers Ys1 and Ys2 are
isomorphic. We have to prove that s1 and s2 are in a common integral manifold for
V. The corresponding fibers Zs1 and Zs2 in the family of resolutions are isomorphic,
say with an isomorphism θ. Now they are also embedded resolutions of Cs1 and Cs2
respectively:
es −−−−→
C
Zsi
i
for i = 1, 2.
y
y
Csi −−−−→ Spec C[[x, y]]
es ) be the image of C
es in Zs under the isomorphism. It is not difficult
e 0 = θ(C
Let C
2
2
1
to find an embedded deformation (say over a one-dimensional base space (B, 0))
es ⊂ Zs such that a fiber (over b ∈ B) in this deformations is isomorphic to
of C
1
1
0
e ⊂ Zs . Let η : C0 → B be the induced deformation of Cs by blowing down. From
C
1
1
4.8. MODULI SPACES
145
(1)
(r)
versality in the étale topology there is a finite sequence s1 = s1 , . . . , s1 = s01 of
points in SΦ , a corresponding covering (Es(i) , ei ) → B in the étale topology of some
1
(i)
connected subset of B containing b and 0, and morphisms ψi : (Es(i) , ei ) → (S, s1 )
1
such that C0 ×B Es(i) is isomorphic to C ×SΦ Es(i) over Es(i) , er = b, e0 = 0 and such
1
1
1
(i)
that s1 is in the image of ψi−1 (for i > 1.) Clearly, the from η induced (section
4.6.2) family of resolutions Z0 → B of sandwiched surfaces, is trivial, and Z0 ×B Es(i)
1
(i)
(i+1)
is isomorphic to Z ×SΦ Es(i) . Thus Z ×SΦ Es(i) is trivial. It follows that s1 and s1
1
1
(1)
(r)
are in a trivial subfamily, hence s1 = s1 and s1 = s01 lie in an integral manifold
for V, see meaning of 4.7.3.
Now Cs01 and Cs2 are isomorphic. From [Had96, lemma 2.6, 3.6], it thus follows
that s01 and s2 lie in an integral manifold for VC . Hence s1 and s2 lie in some integral
manifold for V.
Remark 4.8.2. The ring A in the proof has a grading, which we view as a negative
grading. This grading on A induces a grading of DerC (A) such that VC is a homogeneous module over A, see [Had96]. Moreover, VC may be generated as an A-module
of derivations with non-negative degree. There will be only one generator of degree
0 corresponding to a C∗ -action on SΦ . Remark that SΦ must be chosen non-minimal
in order to have these properties, see [Had96, Sec. 3.2].
Proposition 4.8.3. The Lie-algebra V is homogeneous in the grading induced form
A.
Proof. Let Z → S be the family of resolutions corresponding to the family Y →
S of sandwiched surfaces. Then Z → S is obtained by blowing up sections, see
Proposition 4.6.4. Since C is defined by a homogeneous element of positive degree
in A[[x, y]], see [Had96, p. 73] (where x and y have positive degree) it is clear that
the sections blown up to get Z are homogeneous as well. From this and the proof of
Proposition 4.6.4 it follows that the family of complete ideals Q corresponding to Y,
is a homogeneous ideal in A[[x, y]]. As we have the exact sequence
g
∂F
0 −−−−→ V −−−−→ DerC (A) −−−−→ A[[x, y]]/( ∂F
∂x , ∂y , F ) + Q.
and we are considering the grading on V such that g is homogeneous of degree 0,
the conclusion follows.
Lemma 4.8.4. Let S = SΦ = Spec A, V and VC be as in the proof of the theorem. Assume that V is generated as an A-module by homogeneous δ0 , . . . , δn where
deg δi > 0 for i > 0 and deg δ0 is the euler vectorfield. Let V be the Lie-algebra
generated by δ0 , . . . , δn . Then exp(V ) is an algebraic group.
146
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
P1 i
Proof. The map exp : V → Aut(A) maps δ to the automorphism a 7→
i! δ (a), see
[GP93]. If the degree of δi is positive, it will be nil-potent, that is, for every a ∈ A
there is an r such that δir (a) = 0. The euler vectorfield corresponds to the C∗ -action.
It follows that exp(V ) is an algebraic group.
Remark 4.8.5. The hypothesis of the lemma are satisfied if Φ is generated by two
elements, that is in the case of quasihomogeneous type. We will write Ga for the
algebraic group in this case. Note that the orbits for the action of Ga coincides with
the integral manifolds for V.
Since the hypothesis of the lemma holds for VC we also expect them to hold for
V:
Conjecture 4.8.6. The hypothesis of the above lemma is satisfied.
Remark 4.8.7. Note that from [GP93] that there is always a stratification of SΦ such
that there exist a geometric quotient on each stratum. These will be coarse moduli
spaces, see Remark 4.7.14. The problem is however to give a (preferably geometric)
description of the stratas in terms of invariants of the singularities (corresponding
to points) in each stratum.
Example 4.8.8. Consider the case where Φ = hp, qi = h5, 7i . Then the corresponding Γ∗a = Γ∗5,7,a is as follows:
Let aa = ap,q,a be the ideal generated by monomials xi y j where 5i + 7j ≥ 5 · 7 + a,
and let
F = x7 + y 5 + t1 x3 y 3 + t2 x5 y 2 + t3 x4 y 3 + t4 x5 y 3 ∈ C[t1 , t2 , t3 , t4 ][[x, y]].
Then F is homogeneous in the following grading of C[t1 , t2 , t3 , t4 ][[x, y]] :
deg
t1
-1
t2
-4
t3
-6
t4
-11
x
5
y
7
Now let C = V (F ) → S = Spec C[t1 , t2 , t3 , t4 ] be the corresponding family of plane
curve singularities. This family contains all plane curve singularities with semigroup
Φ. Let Qa = (F ) + aa , and let Ya → S = Spec C[t1 , t2 , t3 , t4 ] be the blow up of
S ×Spec C[[x, y]] in Qa . Then this is the family of sandwiched surfaces corresponding
4.8. MODULI SPACES
147
to C → S, see Section 4.6.2. The Kodaira-Spencer kernel VC corresponding to the
family C → S is generated by the following vector-fields:
δ0 =
t1
δ5 =
δ7 =
δ10 =
∂
∂
∂
∂
+ 4t2
+ 6t3
+ 11t4
∂t1
∂t2
∂t3
∂t4
∂
∂
+ 6t3
t1
∂t3
∂t4
∂
t2
∂t4
∂
t1
∂t4
and deg δi = i. Let Va be the Kodaira-Spencer kernel corresponding to the family
Y → S. We know that Va ⊃ VC . To list generators for Va we take the generators
for VC and extend to a generator set of Va . The following table gives the extra
generators needed.
a ≥ a ≤ Extra generators
12
7
11
5
6
2
4
∂
∂t4
∂
∂
,
∂t3 ∂t4
∂
∂
∂
,
,
∂t2 ∂t3 ∂t4
See Proposition 4.8.10. Now consider the
i = 1, 2, 3 given by
1 0
0 1
ξ 7→
0 0
0 ξ
1 0
0 1
ξ 7→
0 0
ξ 0
homomorphisms λi : A1 → GL(C, 4),
0
0
1
0
0
0
0
1
0
0
1
0
0
0
0
1
0 0
1 0
0 1
0 6ξ
0
0
0
1
,
and
ξ 7→
1
0
ξ
3ξ
,
148
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
respectively. Let λ0 : C∗ → GL(C, 4) be the homomorphism given by
ξ 0 0
0
0 ξ4 0
0
ξ 7→
.
0 0 ξ6 0
0 0 0 ξ 11
Then G = exp(VC ) is the subgroup of GL(C, 4) generated by (the image of) these
homomorphisms.
Let Ai ⊂ Aut(A4 ) be the copy of C in Aut(A4 ) corresponding to translations
parallel to the ti -axis. The following table lists the group Ga ⊂ Aut(A4 ) of the
theorem for the different values of a.
a≥
12
7
5
2
4.8.2
a≤
11
6
4
Ga is generated by
G
G, A4
G, A3 , A4
G, A2 , A3 , A4
Results in the case of quasihomogenous type
In this subsection we specialize to the case of quasihomogenous type. Thus we
consider primitive sandwiched singularities with dualgraph Γ∗ of the form decribed
in Section 4.3.3. These sandwiched singularities are precisely those, which may be
constructed from an irreducible plane curve singularity with a semigroup generated
by two elements.
First we investigate the Kodaira-Spencer kernel. We do this by relating the
Kodaira-Spencer kernel of a family of sandwiched singularities or sandwiched surfaces, to the Kodaira-Spencer kernel associated to the corresponding family of irreducible plane curve singularities. We then introduce some new invariants which
we use for stratification in order to get coarse modulispaces. These are so called
τ -sequences. This notion take advantage of the fact sandwiched singularities and
sandwiched surfaces come in series. Thus a τ -sequence is the sequence of the corresponding τ -invariants. After introducing τ -sequences, we prove that there are
coarse modulispaces for sandwiched singularities and sandwiched surfaces with fixed
τ -sequences.
Calculation of the Kodaira-Spencer kernel
In this subsection we calculate the Kodaira-Spencer kernel. In the case of plane curve
singularities this calculation is contained in [LP88]. We start by briefly recalling
these results. Next we use them to describe the Kodaira-Spencer kernel in the case
of sandwiched surfaces and sandwiched singularities.
4.8. MODULI SPACES
149
Calculation of the Kodaira-Spencer kernel for plane curve singularities.
In this paragraph we recall some results from [LP88]. Let
Ap,q = (i, j) ∈ (N ∪ {0})2 |i ≤ p − 2, j ≤ q − 2 and qi + pj ≥ pq ,
put
t = {tqi+pj−pq }(i,j)∈Ap,q
and let Sp,q = Shp,qi = Spec C[t]. By the C∗ -action on Sp,q we will mean the C∗ -action
given by setting deg tα = −α. Now consider
F = xp + y q +
X
tqi+pj−pq xi y j ∈ C[t][[x, y]]
(4.8.1)
(i,j)∈Ap,q
Since deg x = p and deg y = p we get F homogeneous. We denote by C = V (F ) ⊂
Spec C[t][[x, y]] the corresponding family of irreducible plane curve singularities.
This is an equisingular family of plane curve singularities. The Kodaira-Spencer
kernel for this family is
g : DerC (C[t]) → C[t][[x, y]]/
∂F ∂F
,
,F
∂x ∂y
defined by
∂
∂F
7→
.
∂tα
∂tα
Let VC denote the kernel of g. Then there are special generators {δα } of VC as a
C[t]-module, see [LP88, Prop. 4.5]. These are homogeneous with deg δα = α. We
consider also the matrix
M = (δα (tβ ))
formed by applying these derivations to the variables t.
Remark 4.8.9. It may be assumed that this matrix is symmetric with respect to the
anti diagonal. This is proved in [LP88, Prop. 5.6].
If, for a point s ∈ Sp,q , we denote by M (s) the matrix with entries in C obtained
by reducing modulo ms , we have
rank M (s) = µ − τ (s),
where µ = (p − 1)(q − 1) is the (constant) Milnor number of the curves in the family
and τ (s) is the Tjurina number of the corresponding fiber.
150
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Calculation of the Kodaira-Spencer kernel for sandwiched singularities
with sandwiching and sandwiched surfaces. In this paragraph we describe
the Kodaira-Spencer kernel in the case of sandwiched singularities and sandwiched
surfaces in terms of the Kodaira-Spencer kernel for the defining curve. Keep the
notation of the previous paragraph and recall the definition of ap,q,a from Section
4.3.3. We define
Qp,q,a = (F ) + ap,q,a ⊂ C[t, x, y]
and
Yp,q,a = Proj
M
Qp,q,a
to be the blow up of Sp,q × A2 in Qp,q,a . This is a family of sandwiched surfaces.
Remark that all sandwiched surfaces with dualgraph Γ∗p,q,a are contained in this
family. This follows from the corresponding fact for plane curve singularities. Let
Xp,q,a → Sp,q × Spec C[[x, y]] be the corresponding family of sandwiched singularities
with sandwiching. Then, of course, this family contains all sandwiched singularities
with dualgraph Γ∗ .
Let Zp,q,a be the family of resolution of Yp,q,a from Theorem 4.6.4, and Ep,q,a ⊂
Zp,q,a the exceptional set for the blow down to Sp,q × A2 . Then the Kodaira-Spencer
map
DerC (C[t]) → H 1 (Zp,q,a , θ(log Ep,q,a ))
was discussed in 4.7.3. Thus the kernel coincides with that of
∂F ∂F
,
, F + ap,q,a ,
g : DerC (C[t]) → C[t, x, y]/
∂x ∂y
see 4.7.6. Let V be the kernel of g. This is also the kernel of the Kodaira-Spencer
map corresponding to the family Xp,q,a → Sp,q × Spec C[[x, y]].
Proposition 4.8.10. The Kodaira-Spencer kernel V is generated as a C[t]-module
by ∂t∂ i , where i ≥ a, and the particular homogeneous generators δα of VC .
Proof. Let m1 , . . . , mk be the monomials xi y j for (i, j) ∈ Ap,q , and let mr , . . . , mk
be those of degree grater or equal to a. Now the module
ap,q,a + (
∂F ∂F
∂F ∂F
,
)/(
,
)
∂x ∂y
∂x ∂y
is generated as a C[t]-module by mr , . . . , mk . Thus if
X
∂F ∂F
ai mi ∈ (
,
, F ) + ap,q,a ,
∂x ∂y
Pk
P
with ai ∈ C[t], we may find h =
ai mi + h ∈
i=r bi mi (bi ∈ C[t]) such that
∂F ∂F
∂
( ∂x , ∂y , F ). Since ∂ti maps to the monomial of degree i, it follows that V is contained
in VC modulo the derivations ∂t∂ i , where i ≥ a. The other inclusion is clear.
4.8. MODULI SPACES
151
τ -sequence stratification
In this subsection we introduce the notion of τ -sequences. These are defined in
terms of the series of sandwiched singularities in which the singularity sits. We
further discuss the stratification of Sp,q with respect to these invariants.
Given a sandwiched surface Ya = Y(C,a) there are natural projections Ya →
Ya−1 → · · · → Y1 . For each Ya we have the minimal resolution Za . Then we put
τ (Ya ) = dimC H 1 (Za , θ(log Ea )) where Ea is the exceptional set of Za → A2 .
Definition 4.8.11. The τ -sequence corresponding to Ya = Y(C,a) is
τ (Ya ) = (τ (Y1 ), τ (Y2 ), . . . , τ (Ya )).
Remark 4.8.12. If a > p(q − 2) + q(p − 2) − pq = pq − 2(p + q), then τ (Ya ) = τ (Ya+1 ).
The meaning of τ (Y∞ ) is thus clear, and the τ -sequences for the Ya are truncations
of this.
Example 4.8.13. Consider the plane curve singularity C = Spec C[[x, y]]/(x7 +y 5 ).
Let Ya = Y(C,a) . Then
τ (Y∞ ) = (0, 1, 1, 1, 2, 2, 3, 3, 3, 3, 3, 4, 4, . . . ).
Having defined the notion of τ -sequences for sandwiched surfaces, we have through
the identification in 4.6.14, defined the notion of τ -sequences for sandwiched singularities with sandwiching. We will write τ ((X, x) → (A2 , 0)) or by abuse of notation
τ (X).
In the next section we will consider τ -constant families, meaning families of sandwiched singularities or sandwiched surface corresponding to the same τ -sequence.
For reduced base spaces it is clear what we will mean by this, but for non-reduced
spaces the correct notion is a flatness condition.
Let Y → S be an equisingular family of sandwiched surfaces. Then from Proposition 4.6.4, there is a corresponding family of resolutions Z → S with exceptional
set E.
Definition 4.8.14. The family Y → S is said to be τ -constant if H 1 (Z, θ(log E)) is
S-flat, and each fiber in Y → S has the given τ.
The family Y sits in a series, that is there are families Y = Ya , Ya−1 , . . . Y1 over
S, with corresponding families of resolutions Zi → S and exceptional sets Ei . Thus
we make the following definition.
Definition 4.8.15. The family Y → S is said to be τ -constant if H 1 (Zi , θ(log Ei ))
is S-flat for i = 1, . . . , a, and each fiber has the given τ -sequence τ .
152
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
We define the equivalent notions for sandwiched singularities through the identification in Proposition 4.6.14.
Recall the map Mcurve,Φ → Msand,Γ∗ ' Msur,Γ∗ where Φ is a semigroup of an
irreducible plane curve singularity and Γ∗ is the dual graph corresponding to this
semigroup and a choice of an integer a. Let C → S be a family in Mcurve,Γ∗ (S), let
Ya → S be the image in Msur,Γ∗ and let Za → S be the corresponding family of
resolutions, see proposition 4.6.4.
Coarse moduli spaces for plane curves singularities In this section we use
the τ to restrict the functor Mcurve,Φ in order to get coarse moduli spaces.
Definition 4.8.16. We will say that C is τ -constant if H 1 (Za , θ(log Ei )) is S-flat for
all a. If C is a plane curve with semigroup Φ we put τ (C) = τ (Y(C,∞) ).
We relate τ -sequences to the Hilbert function of the Tjurina-algebra. Let Sp,q =
Shp,qi = Spec C[t], let F be as in 4.8.1, and let Va be the Kodaira-Spencer kernel
corresponding to the family Yp,q,a → Sp,q and its family of resolutions Za = Zp,q,a
and exceptional set Ea . Consider the exact sequence
0 → Va → DerC (C[t]) → H 1 (Za , θ(log Ea )) → 0
(4.8.2)
Comparing with the exact sequence
0 → Va → DerC (C[t]) → C[t][[x, y]]/
∂F ∂F
,
,F
∂x ∂y
+ ap,q,a .
it follows (see [GP94]) that τ -constancy is equivalent to the constancy of the function
∂F ∂F
,
, F + ap,q,a .
a 7→ dimC C[t][[x, y]]/
∂x ∂y
This is a “finer” Hilbert function that the one considered in [GP94]. In particular
the constancy of our function implies the constancy of the one in [GP94].
Remark 4.8.17. We have
H (Za , θ(log Ea )) = ap,q,0 /ap,q,a +
1
∂F ∂F
,
,F
∂x ∂y
.
Let {δα } be a set of homogeneous set of generators for VC such that deg δα = α. Let
Ma be the matrix (δα (tβ ))−β<a . Then the H 1 (Za , θ(log Ea ))-flattening stratification
of S coincides with the rank stratification of Ma .
τ
Definition 4.8.18. For a given τ -sequence τ we define Mcurve,Φ to be the subfunctor
of Mcurve,Φ consisting of τ -constant equisingular families of plane curves.
4.8. MODULI SPACES
153
Theorem 4.8.19. Let Φ = hp, qi , (p, q) = 1. Let τ be a τ -sequence, such that
τ
τ
τ
Mcurve,Φ ({∗}) 6= ∅, then there exist a coarse moduli space Mcurve,Φ for Mcurve,Φ .
Proof. Let V+
C be the vector-fields in VC of positive degree. Change the filtration
·
F (C[t]) in [GP94] so that F i (C[t]) is the C-vectorspace generated by all homogeneous polynomial of degree ≥ −i. Change the filtration Z(V+
C ) correspondingly. An
argument as in the proof of [GHP96, lemma 4.4], shows that the H 1 (Za , θ(log Ea ))flattening stratification of S coincides with the stratification with respect to the
filtrations F · and Z· , see [GP93]. Theorem 4.7 of [GP93] shows that the τ -constant
+
stratas are V+
C -invariant and that there exists geometric quotients, Uτ /VC . Finely,
C∗ acts on Uτ /V+
C and the quotient exists as an geometric quotient which coincides
τ
with Uτ /VC . The quotient will be a coarse moduli space for Mcurve,Φ , see Remark
4.7.14.
Example 4.8.20. We continue example 4.8.8. From sequence 4.8.2, it follows that
the τ (Ya )-constant stratas are exactly the flattening stratas of Va . This is the same
as the constant rank stratas. In the next table we give these stratas for different
values of a.
a≥
a≤
rank Va = 3
rank Va = 2
rank Va = 1
rank Va = 0
(V (t1 )∩D(t2 ))
12
D(t1 )
∪
(D(t4 )∩V (t22 ,t3 t2 ,t1 t2 ,
(D(36t23 −11t1 t4 )∩
36t23 −11t1 t4 ,t1 t3 ,t21 ))
V (t1 ,t2 ,t3 ,t4 )
V (t1 t22 ,t21 t2 ,t31 ))
(V (t21 ,t1 t2 )∩D(t3 ))
7
11
D(t1 )
∪
V (t1 ,t2 ,t3 )
(V (t1 )∩D(t2 ))
5
2
6
4
D(t1 )∪D(t2 )
V (t1 ,t2 )
D(t1 )
V (t1 )
We may now find the possible values of τ and the corresponding τ -constant stratas.
Since Va only changes for certain as we may code the possible ranks for Va as a
varies in 4-tuples named v. Because of 4.8.2, v is equivalent with τ . In the following
table we give the possible values of v and the coarse moduli spaces.
v
(3,2,2,1)
(2,1,1,0)
(1,0,0,0)
(0,0,0,0)
Uτ
D(t1 )
V (t1 ) ∩ D(t2 )
V (t1 , t2 , t3 ) ∩ D(t4 )
V (t1 , t2 , t3 , t4 )
Mτ
−1
Spec C[t1 , t1 , t2 ]/C∗ ' A1
∗
1
Spec C[t2 , t−1
2 , t3 ]/C ' A
∗
Spec C[t4 , t−1
4 ]/C ' {∗} ∩ {∗}
(4.8.3)
{∗}
Remark 4.8.21. It should be pointed out that the above example is an easy one. In
fact as is clear from 4.8.3, we have actually stratified only for τ, since there is only
154
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
one value of τ for each τ -sequence. In general it is not enough to stratify for τ. An
example is given in [LP88, p. 108], see below.
Example 4.8.22. If we choose Φ = h5, 11i and consider τ -sequences τ corresponding
to τ = 4, (corresponds to Tjurina number 40 − 9 + 4 = 35) one may check that there
are three possibilities for τ .
Possible values of τ
(0, 0, 1, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, . . . )
(0, 0, 1, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, . . . )
(0, 0, 1, 2, 2, 2, 2, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4, . . . )
The two first are different only at one place and in fact there exist a common coarse
moduli space for these values of τ , see [GP94]. But there does not exist a geometric
quotient of the strata corresponding to all three values of τ , see [LP88, p. 109].
The above result give a geometric understanding of the stratification needed in
oder to construct coarse moduli spaces. In addition to the connection to sandwiched
singularities it is also possible to describe our stratification in terms of complete
ideals using that Mcom,Γ∗ ' Msand,Γ∗ . If we think of a complete ideal as defined by
the set of plane curves having a specified order of contact (the integer a), we may
view τ -constancy as a condition of simultaneous embedded resolution.
Coarse moduli spaces for sandwiched singularities
In this section we prove the existence of coarse moduli spaces for primitive sandwiched singularities of quasihomogeneous type and fixed τ -sequence. These are
quotients of the coarse moduli spaces for plane curve singularities with fixed τ sequences.
Theorem 4.8.23. Let Γ∗ be the dualgraph of a sandwiched singularity (with sandτ
wiching) of quasihomogeneous type and let τ be a τ -sequence such that Msand,Γ∗ ({∗}) 6=
τ
τ
∅, then there exists a coarse moduli space Msand,Γ∗ for Msand,Γ∗ .
Proof. The dualgraph Γ∗ = Γ∗p,q,a for some p, q and a. Let S = Sp,q and let C =
V (F ) → S be the family of curves as defined in 4.8.1. Let X → S × A2 be the
family of sandwiched singularities induced from C, as in Section 4.6.2. Let VC be
the Kodaira-Spencer kernel corresponding to C → S, and let V be the KodairaSpencer kernel corresponding to the family X → S × A2 of sandwiched singularities.
Let S = ∪Uτ i be the stratification of S with respect to infinite τ -sequences. By
extending the sequence τ with some admissible τ (Ya+1 ), . . . , we get a infinite τ sequence which must be among the τ i . Chose the corresponding Uτ i .
Now the quotient π : Uτ → M of Uτ i by VC exists from Theorem 4.8.19. We have
Uτ i ⊂ S = An for some n. Let p : An → Am be the projection on the coordinates
4.8. MODULI SPACES
155
corresponding to tj for j ≤ a, and let s : Am → An be the natural section. Let
Uτ0 i = s(p(Uτ i )). Since V is generated by VC and ∂t∂j where j ≥ a, it is clear that
X ×S×A2 p(S) × A2 is the miniversal family of the central fiber, see theorem 3.3.17
and Proposition 4.5.24. This family has local versality properties, and Uτ0 i may be
defined by flattening stratification of p(S). Let V0 be the kernel of the KodairaSpencer map corresponding to the family X ×S×A2 p(S) × A2 . Note that V0 is gotten
from V (or equivalently VC ) by letting tj = 0 for j ≥ a. Using the filtrations induced
by those in the proof of Theorem 4.8.19, it will follow from [GP93, Th. 4.7] that the
geometric quotient Uτ0 i → M 0 of Uτ0 i by the action of V0 exists. An easy modification
of [LP88, lemma 6.2] gives that the orbits are in one to one correspondence with
isomorphism classes. Thus M 0 is the moduli space, see Remark 4.7.14.
Example 4.8.24. Consider again example 4.8.8. For different values of a we will
induce different families of sandwiched surfaces. For a ≥ 12 we will have the same
moduli spaces as for curves. Below we list the situations according to the different
values of a. The v corresponds in a unique way to the τ -sequences.
Modulispaces when 7 ≤ a ≤ 11.
v
(2,2,1)
(1,1,0)
(0,0,0)
Uτ
D(t1 ) ⊂ Spec C[t1 , t2 , t3 ]
V (t1 ) ∩ D(t2 )
V (t1 , t2 , t3 )
Mτ
−1
Spec C[t1 , t1 , t2 ]/C∗
∗
Spec C[t2 , t−1
2 , t3 ]/C
' A1
' A1
(4.8.4)
{∗}
Modulispaces when 5 ≤ a ≤ 6.
v
(2,1)
(1,0)
(0,0)
Uτ
D(t1 ) ⊂ Spec C[t1 , t2 ]
V (t1 ) ∩ D(t2 )
V (t1 , t2 )
Mτ
−1
Spec C[t1 , t1 , t2 ]/C∗ ' A1
∗
Spec C[t2 , t−1
2 ]/C ' {∗}
(4.8.5)
{∗}
Modulispaces when 2 ≤ a ≤ 4.
v
(1)
(0)
Uτ
D(t1 ) ⊂ Spec C[t1 ]
V (t1 )
Mτ
∗
Spec C[t1 , t−1
1 ]/C ' {∗}
{∗}
(4.8.6)
Knowing that the situations for sandwiched singularities with sandwiching constructed with large values of a coincides with the situation for plane curve singularities it is in particular interesting to consider the situation for low values of a. In this
case it turn out to be sufficient to stratify for τ . Thus it is not necessary to consider
τ -sequences in this case. We give some examples to illustrate this point.
Example 4.8.25. Let p = 5 and q = 6. The corresponding dual graphs Γ∗5,6,a are
156
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
The dual graphs Γ5,6,a for the corresponding sandwiched singularities are obtained
by deleting the −1 curve. For a = 1 and a = 2 the family Y5,6,a → S5,4 is trivial.
So there is a unique sandwiched singularity with sandwiching having this dualgraph
Γ∗5,6,a . For a = 3 we get the versal family as given by the following family of complete
ideals
Q5,6,3 = (y 6 , xy 5 , x2 y 4 , x3 y 3 , x5 y 2 , x6 y, x7 , t1 x4 y 2 + x6 + y 5 .
Then Vsur is generated by
∂
.
∂t 1
That is Gp,q,a = C∗ , and the action on S5,6 = A1 is the obvious. Thus there are
exactly two surfaces with the same dualgraph. One with τ = 1 and one with τ = 0.
For a = 4 we get
Q5,6,4 = y 6 , xy 5 , x2 y 4 , x4 y 3 , x5 y 2 , x6 y, x7 , t1 x3 y 3 + t2 x4 y 2 + x6 + y 5 .
t1
Further we find that V is generated by
3t1
∂
∂
+ 2t2
.
∂t 1
∂t 2
Thus Gp,q,a = G5,6,4 = C∗ as well. This acts on A2 . There is a unique sandwiched
surface with dualgraph Γ5,6,4 and with τ = 2. Thus {∗} is a coarse moduli space for
M25,6,4,sur . Further A2 \ {0}/C∗ exists and is in fact the weighted projective space
P1(3:2) . This is thus a coarse moduli space for M15,6,4,sur .
Example 4.8.26. We take the example p = 23, q = 54 and a = 16.
Q23,54,16 = (x23 y, x24 , x22 y 4 , x21 y 6 , x20 y 8 , x19 y 11 , x18 y 13 , x17 y 15 , x16 y 18 , x15 y 20 ,
x14 y 22 , x13 y 25 , x12 y 27 , x11 y 29 , x10 y 32 , x9 y 34 , x8 y 36 , x7 y 39 , x6 y 41 , x5 y 43 ,
x4 y 46 , x3 y 48 , x2 y 50 , xy 53 , y 55 , t1 xy 52 + t2 x3 y 47 + t3 x4 y 45 + t4 x6 y 40
+ t5 x7 y 38 + t6 x9 y 33 + t7 x10 y 31 + t8 x12 y 26 + t9 x13 y 24 + t10 x15 y 19
+ t11 x16 y 17 + t12 x18 y 12 + t13 x19 y 10 + t14 x21 y 5 + y 54 + x23 )
We find that Vsur is generated by
8t1
∂
∂
∂
∂
∂
∂
∂
∂
+ t2
+ 9t3
+ 2t4
+ 10t5
+ 3t6
+ 11t7
+ 4t8
∂t 1
∂t 2
∂t 3
∂t 4
∂t 5
∂t 6
∂t 7
∂t 8
∂
∂
∂
∂
∂
∂
+ 12t9
+ 5t10
+ 13t11
+ 6t12
+ 14t13
+ 7t14
,
∂t 9
∂t 10
∂t 11
∂t 12
∂t 13
∂t 14
4.9. RESULTS CONCERNING MSING,Γ .
157
that is, the Euler vector-field. Thus we have again, that Gp,q,a = G23,54,16 = C∗ .
This acts on A14 . There is a unique sandwiched surface with dualgraph Γ23,54,16 and
14
∗
with τ = 14. Thus {∗} is a coarse moduli space for M14
5,6,4,sur . Further A \ {0}/C is
the weighted projective space P1(8:1:9:2:10:3:11:4:12:5:13:6:14:7) , and this is a coarse moduli
space for M13
23,54,16,sur .
These examples indicate that for low a, the group Ga = Gp,q,a = C∗ . In fact we
have:
Theorem 4.8.27. Let p, q ∈ N be given. If a < p then Gp,q,a = C∗ . Thus there are
two possible values for τ, τmax and τmax − 1. The one point space is a coarse moduli
τmax −1 has a weighted projective space as coarse moduli.
max
space for Mτp,q,a,sur
and Mp,q,a,sur
Proof. This follows easily from [LP88, Prop 4.5] and the description of Vsur given
in Section 4.8.2.
4.9
4.9.1
Results concerning Msing,Γ .
Introduction
In this section we turn to the study of the functor Msing,Γ . The corresponding objects
are normal surface singularities. We will only study the case where these happens
to be sandwiched surface singularities. This restriction makes sense since this is a
property of the dualgraph alone.
In this section we will use the term sandwiched singularity for a normal surface
singularity which is sandwiched. In particular we do not consider a sandwiching
to be a part of a sandwiched singularity, and we will see that for a sandwiched
singularity there may be a family of different sandwiching.
The reason way it may be interesting to consider this situation is that many
geometrically interesting singularities in fact admits a sandwiched representation.
However the non-uniqueness of such sandwich representation causes great difficulties,
and we restrict our attention to primitive sandwiched singularities. In this case
we find spaces with locally versality condition which parameterizes all primitive
sandwiched singularities having a given dualgraph. On this space we try to identify a
group action such that the orbits are in one-to-one correspondence with isomorphism
classes of sandwiched singularities. We are able to do this when there is a unique
primitive combinatorial sandwich representation. Due to the form of the graph this
will almost always be the case. However, there is a small set of graphs, which we call
symmetric, which admits two primitive combinatorial sandwiched representations.
We proceed to study the forgetful map Msand,Γ∗ → Msing,Γ . This is a difficult
task and we are only able to give some partial results. Our original hope was that a
158
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
careful study of this map would show how to construct moduli spaces for Msing,Γ∗ .
We are however able carry this through only in very particular cases.
4.9.2
Classifying spaces and isomorphism classes
In this section we find parameter spaces for primitive sandwiched singularities and
show that there is a group action such that orbits of this group action are the locally
trivial subfamilies. Except for some particular cases the orbits will be in one-to-one
correspondence with isomorphism classes.
Symmetric dual graphs for primitive sandwiched singularities. Consider
a graph Γ for a primitive sandwiched singularity. Then we may find a graph Γ∗
such that v(Γ∗ ) \ v(Γ) consists of on vertex and this vertex has the weight −1. In
how many ways (up to automorphisms of Γ and Γ∗ ) may this be done? To describe
this we make a definition. In the notation of Section 4.3.3 assume that the graph
Γ∗ = Γ∗p,q,a in consideration comes from numbers p, q and a such that
1
q
= a1 +
p
a2
is the continued fraction expansion. In particular m = 2. Assume further that
a = a2 + 1. Then the graph Γ obtained after deleting the −1 curve has the following
shape.
That is, there are to ways to embed Γ in Γ∗ . We will have to exclude this possibility.
For easy reference we make the following technical definition.
Definition 4.9.1. We call a dualgraph Γ for a sandwiched singularity for symmetric,
and the other dualgraph for unsymmetric.
Remark 4.9.2. The singularities with symmetric dualgraph is very small class, and
in fact from the shape of the graph, we know that they correspond to determinantal
singularities.
4.9. RESULTS CONCERNING MSING,Γ .
159
Proposition 4.9.3. Let Γ be the dualgraph of a primitive sandwiched singularity.
If the Γ is symmetric there are exactly two choices for Γ∗ as above. If Γ is nonsymmetric there is a unique choice for Γ∗ .
Proof. This follows from the concrete description of the possibilities for Gamma∗ as
given for instance in Section 3.4.1.
Theorem 4.9.4. Let Γ be a dual graph for a primitive sandwiched singularity. Then
there is a smooth scheme S and a family X → S in Msing,Γ (S) which is locally (in the
étale topology) versal and which contains all sandwiched singularities with dualgraph
Γ. There is a Lie-algebra V of derivations on S such that integral manifolds are the
locally trivial subfamilies of X → S. Furthermore, if Γ is unsymmetric these integral
manifolds are in one to one correspondence with isomorphism classes of normals
surface singularities with dualgraph Γ.
Proof. The existence of the family X → S follows from Theorem 4.8.1, Section 4.6.2
and Theorem 4.5.29. Note that X → S comes from a family Y → S of sandwiched
surfaces. here V is the kernel of the Kodaira-Spencer map corresponding to the
family X → S. Now note Theorem 4.7.7.
Assume now that Γ is unsymmetric, and let s1 , s2 ∈ S be such that X ⊗ C(s1 )
and X ⊗ C(s2 ) are isomorphic. To conclude the proof we have to show that s1 and
s2 lie in a trivial subfamily. Let Z → S be the family of resolutions corresponding
to the family Y → S of sandwiched surfaces. Let Zi = Z ⊗ C(si ). Also, let E (i) =
(i)
(i)
∪nj=1 Ej ⊂ Zi be the exceptional sets. Further assume that Ej are numbered
(i)
according to where they enter in the blowing up, so that in particular En ⊂ Zi
(i)
is the unique curve with selfintersection −1, and so that En−1 ⊂ Zi is the unique
(i)
ei of ∪n−1 E (i) .We
curve intersection En ⊂ Zi . Further choose small neighborhoods X
j=1
j
e1 → X
e2 , since formally
may then assume that there is a biholomorphic map ψ : X
equivalence of normal surface singularities implies analytic equivalence.
(i)
(i)
(i)
ei , and
Let Vi be a neighborhood of En−1 \ (En−2 ∩ En−1 ) such that Vi ⊂ X
(i)
let Vi0 ⊂ Zi be a neighborhood of En . Restricting if necessary we may assume that
ψ(V1 ) = V2 . We may further assume that we have coordinate maps φi : Vi → C2 such
(i)
that φi (En−1 ∩ Vi ) = V (xi ) in C2 with coordinates (xi , yi ) and from the hypothesis
on the dualgraph it is clear that (φ2 ◦ ψ ◦ φ−1
1 )(V (x1 )) = V (x2 ). We may also assume
(2)
that φ2 (En ∩ V2 ) = V (y2 ). Now we may deform Z1 by deforming the gluing of V1
and V10 on V1 ∩ V10 . That is, from a, say one-parameter family of automorphisms of
V1 ∩V10 we get a deformation of Z1 . Restricting V1 and V10 we may assume that V1 ∩V10
is arbitrary small. Thus it is not difficult to find a one parameter deformation of Z1
such that when interchanging Z1 with a fiber in this deformation we may assume
(1)
−1
that φ1 (En ∩ V1 ) coincides with (φ2 ◦ ψ ◦ φ−1
1 ) (V (y2 − s)) for some s ∈ C. It is also
clear that we by gluing, may construct a one-parameter deformation of Z2 which
160
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
(2)
(2)
e2 ⊂ Z2 . Thus interchanging Z2 with
shifts En transversal to En−1 and is trivial on X
(1)
e1 ) = En(1) ∩ X
e2 .
a fiber in this family it is clear that we may assume that ψ(En ∩ X
From this it is clear that ψ may be extended to give a biholomorphic map
ψ : W1 → W2 .
(4.9.1)
where Wi are analytic neighborhoods of E (i) ⊂ Zi . The one-parameter deformations
above are in fact equisingular deformations, since −1-curves always lift. This is
a because H 1 (P1 , O(−1)) = 0. It is not difficult to see that such deformation are
algebraic. Thus locally these deformations are induced from Z → S. Because of
4.9.1 it follows from the proof of Theorem 4.8.1 that X ⊗ C(s1 ) and X ⊗ C(s2 ) are
contained in a locally trivial subfamily of X → S.
4.10
The map Msand,Γ∗ → Msing,Γ
4.10.1
Introduction
In this section we try to get information on Msing,Γ by considering the natural
forgetful map Msand,Γ∗ → Msing,Γ . To find a course moduli space for Msing,Γ we could
start with a coarse moduli space for Msand,Γ∗ and try to identify points corresponding
to isomorphic surface singularities (with non-isomorphic sandwiching.) To do this
we consider the map on the tangent level, and the investigations of this section are
concerned with this problem.
The problem of understanding the corresponding tangent map turns out to be
rather difficult, and we are not able to make any conclusive statements. We have
tried to focus on the geometry of the situation, and would have liked to understand
the geometry of the map above. This seems however rather subtle.
If Γ∗ is the graph of a sandwiched singularity with sandwiching, we may do the
operation on Γ∗ corresponding to blow down the −1-curve. Let Γ∗ 0 be the resulting
dualgraph. Then by blowing down, see Proposition 4.6.4, we have a forgetful morphism Msand,Γ∗ → Msand,Γ∗ 0 . We have tried to understand the first forgetful map
in connection with this last one, and we are able to show that in case of quasihomogeneous type (that is the dual graphs has only on star) that the kernel of the
tangent map corresponding to the last forgetful map is contained in the kernel of
the first forgetful map. The last map is however completely described by Theorem
3.3.18, and is always zero or one-dimensional. Thus we show that in many cases the
“kernel” of Msand,Γ∗ → Msing,Γ is at least one-dimensional.
If would perhaps be possible to settle the problem of this section by mere calculation, but this task have several times showed to exceed our calculative skills.
4.10. THE MAP MSAND,Γ∗ → MSING,Γ
4.10.2
161
Calculations on the tangent level
e
Let C be an irreducible plane curve singularity, and let Y = Y(C,a) . Also, let X, X
and Z be as in Section 4.3. Now let π 0 : Z → Z 0 be the last blowup in the definition
of Z, that is π blows down the unique −1-curve in Z. Since the defining plane curve
singularity is assumed to be irreducible, we know that π 0 is the blow up in one point,
p ∈ Z 0 . Let E = ∪ni=1 Ei ⊂ Z be the exceptional set. Let E 0 = ∪n−1
i=1 Ei be the the
part that is blow down to a point in Y. By abuse of notation we will also consider
E1 , . . . , En−1 as curves in Z 0 . For the following discussion we put S = θ(log E 0 ) and
SZ = θ(log E). Define S 0 and SZ 0 on Z 0 similarly.
Lemma 4.10.1. There is an exact sequence
0 → π∗0 S → SZ 0 → C(p) → 0
on Z 0 .
Proof. Note the exact sequence
0 → π∗0 θZ → θZ 0 → Np/Z 0 → 0.
Thus, if a vector-field on Z 0 extends to Z it must vanish in the point of blow up,
and since vector-fields in SZ 0 already vanish in one of the local coordinate directions
at p, it follows that the cokernel of π∗0 S → SZ 0 is C(p).
Taking the long exact sequence in cohomology, we get
α
0 → H 0 (Z, S) → H 0 (Z 0 , SZ 0 ) → C → H 1 (Z 0 , π∗0 S) −
→ H 1 (Z 0 , SZ 0 ) → 0,
(4.10.1)
and from Leray spectral sequence we get the short exact sequence
0 → H 1 (Z 0 , π∗0 S) → H 1 (Z, S) → H 0 (Z 0 , R1 π∗0 S) → 0.
A small calculation shows that
H 0 (Z 0 , R1 π∗0 S) = 0,
so we identify α, with a map
H 1 (Z, S) → H 1 (Z 0 , SZ 0 ).
Then since H 1 (Z, S) = H 1 (Z, SZ 0 ), see the proof of proposition 3.3.19. we identify
α with the surjective “blow down” map
H 1 (Z, SZ ) → H 1 (Z 0 , SZ 0 ).
(4.10.2)
162
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Now from 4.10.1 we see that this is an isomorphism if and only if there is no global
vector-field on Z 0 parallel with En−1 not vanishing in the point of blowup p. This
means that it is not possible to move the point of blowup freely without changing the
isomorphism class of Z. Denote by K the kernel of the map 4.10.2. Then dimC K ≤ 1,
and K generated by a global vector-field on Z 0 parallel with En−1 not vanishing in
p. In fact, the image of K in H 1 (Z, SZ ) corresponds to a deformations of Z arising
from moving the point p along En−1 ⊂ Z 0 .
We would like to connect the subspace K of H 1 (Z, SZ ) = H 1 (Z, S) with the
subspace H 1 (Y, θ) of H 1 (Z, S). We have of course that
0
: Z \ En → Z 0 \ {p}
π|Z\E
n
e 0 is the strict transform of C in Z 0 , put X
e0 = Z0 \ C
e0 .
is an isomorphism. Further if C
e
e
e0
Then π 0 e
e gives an isomorphism of X \ (En ∩ X) and X .
|X\(En ∩X)
Consider now the following diagram from local cohomology
0
y
0 −−−−→
H 0 (Z, S)
y
0
y
−−−−→
e S)
H 0 (X,
y
e \ (En ∩ X),
e S)
0 −−−−→ H 0 (Z \ En , S) −−−−→ H 0 (X
y
y
α
HE1 n (Z, S)
βy
−−−−→
H 1 (Z, S)
γ
y
−−−−→
H1
e S)
(X,
y
e
En ∩X
(4.10.3)
e S)
H 1 (X,
δy
e \ (En ∩ X),
e S)
H 1 (Z \ En , S) −−−−→ H 1 (X
y
y
HE2 n (Z, S)
−−−−→
H2
e
En ∩X
e S)
(X,
where the columns are exact. We calculate α. We may find an affine neighborhood
U 0 = Spec C[x, y] ⊂ Z 0 of p. Without loss of generality we may assume that En−1 ⊂
e 0 of C is given by V (y).
Z 0 is given by V (x) in U 0 and that the strict transform C
Then
U1 = Spec C[x, y, xy ]
(4.10.4)
y
U2 = Spec C[x, y, x ]
4.10. THE MAP MSAND,Γ∗ → MSING,Γ
163
e = U1 since C
e is given in U2 by
cover En ⊂ Z. Let U = U1 ∪ U2 , and U ∩ X
excision we have
0 −−−−→ H 0 (U, S) −−−−→
y
H 0 (U \ En , S)
y
−−−−→
HE1 n (Z, S)
αy
y
x.
By
−−−−→ H 1 (U, S)
0 −−−−→ H 0 (U1 , S) −−−−→ H 0 (U1 \ (En ∩ U1 ), S) −−−−→ H 1
e S) −−−−→ H 1 (U1 , S).
(X,
(4.10.5)
Of course H 1 (U1 , S) = 0. Also one calculates in order to see that H 1 (U, S) = 0. We
further have
∂
∂
∂
0
0
0
0
.
H (U, S) = H (U , π∗ S) = x , x , y
∂x ∂y ∂y
e
En ∩X
D
E
∂
∂
∂
Here x ∂x
, x ∂y
, y ∂y
, denotes the C[x, y]-submodule of
DerC (C[x, y]) = C[x, y]
∂
∂
⊕ C[x, y]
∂x
∂y
∂
∂
∂
generated by x ∂x
, x ∂y
and y ∂y
. The next group in the first row is
0
0
0
0
0
0
0
H (U \ En , S) = H (U \ {p}, S ) = H (U , S ) =
∂ ∂
x ,
∂x ∂y
since S 0 is locally free and noting [Har77, Ex. III.3.4]. For the second row we see
that
x
x 0
H (U1 , S) = D ∈ DerC (C[x, y, ]) D(x) = 0, D( ) = 0 .
y
y
Writing
x
x ∂
x ∂
DerC (C[x, y, ]) = C[x, y, ]
⊕ C[x, y, ]
y
y ∂x
y ∂y
we get that
0
H (U1 , S) =
∂ x ∂
∂
+
x ,
∂x y ∂x ∂y
x
⊂ DerC (C[x, y, ]).
y
With similar notation we have
0
H (U1 \ (En ∩ U1 ), S) =
∂ ∂
x ,
∂x ∂y
1
⊂ DerC (C[x, y, ]).
y
164
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Thus we rewrite the diagram 4.10.5 as
0
y
D
∂
∂
∂
, x ∂y
, y ∂y
x ∂x
y
D
E
∂
∂
x ∂x
, ∂y
1
y
HE1 n (Z, S)
y
0
0
y
E
1
−−−−→
−−−−→
α
−−−−→
D
∂ x ∂
∂
x ∂x
, y ∂x + ∂y
y
D
E
∂
∂
x ∂x
, ∂y
3
y
H1
E
2
e (X, S)
En ∩X
e
y
0
where <>1 means generated as a submodule of DerC (C[x, y]), <>2 means generated as a submodule of DerC (C[x, y, xy ]) and <>3 means generated as a submodule
of DerC (C[x, y, y1 ]). Remark that the kernel of β is exactly K. Now we note the
following:
Lemma 4.10.2. Assume K 6= 0. Then, in the notation above, K = im β ⊂
∂
e \(En ∩X),
e S) ⊂ H 0 (U1 \(U1 ∩En ), S)
H 1 (Y, θ) ⊂ H 1 (Z, S) if and only if xy ∂x
∈ H 0 (X
D
E
∂ x ∂
∂
modulo some element in x ∂x
, y ∂x + ∂y
⊂ DerC (C[x, y, xy ]).
Proof. In the notation of the diagram above, we see that HE1 n (Z, S) is generated by
∂
e S) is
. It is also clear that image, e, of this element in H 1 e (X,
the image of ∂y
En ∩X
non-zero. Considering the diagram 4.10.3 it thus clear that order to have that the
e S), e must be in the image of
generator of K ⊂ H 1 (Z, S) maps to zero in H 1 (X,
e \ (En ∩ X),
e S). Considering H 0 (X
e \ (En ∩ X),
e S) as a subspace of H 0 (U1 \
H 0 (X
(U1 ∩ En ), S), and realize that the maps are the natural ones, it is clear that we must
∂
e \ (En ∩ X),
e S) ⊂ H 0 (U1 \ (U1 ∩ En ), S) modulo some element in
have ∂y
∈ H 0 (X
D
E
∂
∂ x ∂
, y ∂x + ∂y
⊂ DerC (C[x, y, xy ]). Both directions of the equivalence should now
x ∂x
be clear.
e \(En ∩ X)
e '
Consider now the lower part of 4.10.3. We have already noted that X
e 0 , so we identify
X
e \ (En ∩ X),
e S) = H 1 (X
e 0 , SZ 0 ).
H 1 (X
4.10. THE MAP MSAND,Γ∗ → MSING,Γ
Also H 2
e
En ∩X
165
e S) = 0. Consider the diagram
(X,
Hp1 (Z 0 , SZ 0 )
y
H 1 (Z, S)
γy
H 1 (Z 0 , SZ 0 )
y
−−−−→
H 1 (Z \ En , S)
y
H 1 (Z 0 \ {p}, SZ 0 ).
y
HE2 n (Z, S)
Hp2 (Z 0 , SZ 0 ).
−−−−→ 0
Here the rows are both part of a long exact sequence in local cohomology. From
excision and the long exact sequence in cohomology, we have
H 0 (U, SZ 0 ) → H 0 (U \ {p}, SZ 0 ) → Hp1 (Z 0 , SZ 0 ) → H 1 (U, SZ 0 )
where U is an affine neighborhood of p. Since S 0 is locally free, from [Har77, Ex.
III.3.4] it follows that the first map is an isomorphism. Thus, since U is affine,
H 1 (U, SZ 0 ) = 0. Thus Hp1 (Z, S) = 0, and it is clear that im γ ' H 1 (Z 0 , SZ 0 ). Furthermore, since
0 → SZ 0 → S 0 → NEn−1 → 0
e NE ) = 0 we have
is exact and H 0 (Z 0 , NEn−1 ) = H 1 (Z 0 , NEn−1 ) = H 1 (X,
n−1
e 0 , SZ 0 ) −−−−→ H 1 (X,
e S0) → 0
H 1 (X
x
x
H 1 (Z 0 , SZ 0 )
H 1 (Z 0 , S 0 )
Thus the lower part of 4.10.3 and Proposition 3.3.19 gives
0
y
K
y
0
y
φ
−−−−→
L
y
e S) −−−−→ 0
0 −−−−→ H 1 (Y, θ) −−−−→ H 1 (Z, S) −−−−→ H 1 (X,
ψy
y
y
e 0 , S 0 ) −−−−→ 0
0 −−−−→ H 1 (Y 0 , θ) −−−−→ H 1 (Z, S 0 ) −−−−→ H 1 (X
y
y
0
0
166
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
for some L.
Since dimC K ≤ 1 then if φ is not the zero-map, it must be injective. Thus there
are two possibilities. We get:
Proposition 4.10.3. Assume the notation above. Then one of the sequences
0 → K → H 1 (Y, θ) → H 1 (Y 0 , θ) → L → 0
and
0 → H 1 (Y, θ) → H 1 (Y 0 , θ) → L/K → 0
are well defined and exact.
We will proceed to show that if the defining curve C is irreducible and of quasihomogeneous type, then the first sequence in the proposition will be well defined
and exact. It is clear from above that it is enough to show that K ⊂ H 1 (Y, θ). In
order to prove this, we need some further calculations.
Consider the tangent sheaf θ on Y. Let θg be a subsheaf of θ generated by global
sections. Then since H 1 (Y, OZ ) = 0 it follows that H 1 (Y, θg ) = 0. Since H 2 vanish
we have that
H 1 (Y, θ) = H 1 (Y, θ/θg ).
Thus if we know some elements of H 0 (Y, θ) = H 0 (Z, θZ ) we may simplify the computation of H 1 (Y, θ). This is the idea behind the following lemma.
Lemma 4.10.4. Assume the defining curve C is irreducible and quasihomogeneous.
Let a be as above, i.e. such that Y = Y(C,a) . There exist U ⊂ Z, U = Spec C[x, y]
e ∩ U = V (y) and such that x ∂ − ay ∂ ∈ H 0 (Z, θ) ⊂
such that En ∩ U = V (x) and C
∂x
∂y
H 0 (U, θ).
Proof. Assume that Z = Zn in a sequence
Z = Zn → Zn−1 → · · · → Z1 → Z0 = A2
of blowing ups in one point at in each Zi . Assume first that Zn gives the minimal
good embedded resolution of C = V (xp + y q ) ⊂ A2 , (p, q) = 1, p < q. We then
prove the following by induction: There exist U = Spec C[x, y] ⊂ Zi such that
ei of C in Zi is given by V (xp0 + y q0 ), in U, p0 < q 0 and
the strict transform C
∂
∂
x ∂x
, y ∂y
∈ H 0 (Zi , θ) ⊂ H 0 (U, θ). This is clear for i = 0. Assume it is true for i.
Then on Zi+1 we have U 0 = Spec C[x0 , y 0 ] ⊂ Zi+1 where x = x0 y 0 and y = y 0 . Then
ei+1 ∩ U ⊂ Zi+1 is given as V (x0 p + y 0 q−p ). Further
C
∂x ∂
∂y ∂
∂
∂
0 ∂
0
x
= x
+ 0
=
x0 y 0
=
x
(4.10.6)
0
0
∂x
∂x ∂x ∂x ∂y
∂x
∂x
∂x ∂
∂y ∂
∂
∂
∂
0 ∂
0
0
0 ∂
y
= y
+ 0
= y x
+
= x
+y
(4.10.7)
0
0
∂y
∂y ∂x ∂y ∂y
∂x ∂y
∂x
∂y
4.10. THE MAP MSAND,Γ∗ → MSING,Γ
167
∂
∂
∂
Since x ∂x
and y ∂y
are in H 0 (Zi , θ) ⊂ H 0 (U, θ), we see from this that x0 ∂x
0 and
∂
0
0
0
0
0
y ∂y0 in H (Zi+1 , θ) ⊂ H (U, θ). By interchanging x and y if necessary, the claim
is proven for i + 1. Assume now that i = n. From the induction above we have
en ∩ U = V (1 + y). Since we know that Ei ∩ U is
U = Spec C[x, y] ⊂ Zi = Zn , where C
given either by V (x) or V (y), we know that Ei ∩ U = V (x). We now use induction
on a. We stated by assuming that Z gave the minimal good embedded resolution of
C, that is, we assumed a = 0, and it is clear that if we put x0 = x and y 0 = 1 + y,
the conclusion of the lemma holds for U 0 = Spec C[x0 , y 0 ]. To conclude the proof, we
may take the conclusion of the lemma as induction hypothesis, and use a similar
calculation as above.
e = V (y) and
Lemma 4.10.5. Assume U = Spec C[x, y] ⊂ Z such that U ∩ C
1
x
0
e
U ∩ En = V (x). Then y and y are in H (X, O) ⊂ C[x, y].
Proof. Let A2 = Spec C[x0 , y 0 ]. Then since Z projects to A2 we have C[x0 , y 0 ] ⊂
C[x, y]. Let f ∈ C[x0 , y 0 ] define C ⊂ A2 . Then we my assume that f = yxm for some
m, by changing C but such that Z is unchanged. There is a valuation v : C(x, y) →
Z, and a β such that
q = q(C,a) = {z ∈ C(x, y) |v(z) ≥ β} ,
see [Spi90b]. Considering this, in fact we have β = m and xm and xm+1 ∈ q ⊂
C[x0 , y 0 ]. In this notations
e O) = C[x0 , y 0 , q ].
H 0 (X,
f
The conclusion is now immediate.
Proposition 4.10.6. Assume the defining curve C is irreducible and quasihomogeneous. Then
K ⊂ H 1 (Y, θ).
e = V (y) and U ∩ En = V (x). It
Proof. Let U = Spec C[x, y] ⊂ Z such that U ∩ C
e O). Thus, from Lemma 4.10.4,
follows from Lemma 4.10.5 that y1 ∈ H 0 (Zn−1 \ C,
x ∂
e θ). Since x ∂ − a ( x ∂ + ∂ ) = 1 ( x ∂ − a ∂ ), from
− a ∂ ∈ H 0 (Zn−1 \ C,
y ∂x
∂y
y ∂x
a+1 y ∂x
∂y
a+1 y ∂x
∂y
Lemma 4.10.2 it follows that K ⊂ H 1 (Y, θ).
The idea, is now to extend this result to all primitive sandwiched singularities
of quasihomogeneous type by considering the versal equisingular family. Let
Ap,q,a = (i, j) ∈ (N ∪ {0})2 |i ≤ p − 2, j ≤ q − 2 and pq < qi + pj < pq + a ,
and let
t = {tqi+pj−pq }(i,j)∈Ap,q .
168
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
Let S = Sp,q,a = Spec A, where A = C[t]. It is important that A is a graded ring
with grading given by deg tα = −α. Now consider
X
F = xp + y q +
tqi+pj−pq xi y j ∈ B
(i,j)∈Ap,q,a
where B = A[x, y]. Since deg x = q and deg y = p we get F homogeneous in the
graded ring B. Let
Q = Qp,q,a = (F ) + ap,q,a ⊂ B,
and let
M
Y = Yp,q,a = Proj(
Qi )
be the blowup of S in Q. The Kodaira-Spencer kernel for the corresponding family
coincides (proposition 4.7.6) with that of the map
gsur : DerC (C[t]) → C[t][[x, y]]/
∂F ∂F
,
,F
∂x ∂y
+ Q.
defined by
∂F
∂
7→
.
∂tα
∂tα
Let Vsur denote the kernel of gsur . We also introduce
Q0 = Qp,q,a−1 = (F ) + ap,q,a−1 ,
0
and denote by Y0 the corresponding blow up of S. We define gsur
and V0sur similar to
e be
gsur and Vsur . Note that Vsur ⊂ V0sur . Let C = V (F ) ⊂ Spec B = S × A2 . Let C
e Let
the strict transform in Y. Put X = Y \ C.
e θe )
gsing : DerC (B) → H 1 (X,
X
be the corresponding Kodaira-Spencer map. Let Vsing be the kernel.
Now let s ∈ S be a point an let Y = Ys and Y 0 = Y0s be the corresponding fibers.
0 ⊗ C(s).
Let Z and Z 0 be the resolutions. Further let V = Vsur ⊗ C(s), V 0 = Vsur
And Vsing = Vsing ⊗ C(s). Let T = TS,s be the Zariski tangent space. Now forget
the base space for a while and let S and S 0 denote the sheaves as in the previous
section. Then we have the following commutative diagram with exact rows:
0 −−−−→ V −−−−→
y
T −−−−→ H 1 (Z, S) −−−−→ 0
y
y
0 −−−−→ V 0 −−−−→ T −−−−→ H 1 (Z 0 , S) −−−−→ 0.
4.10. THE MAP MSAND,Γ∗ → MSING,Γ
169
Recall that K is the kernel of the surjective map H 1 (Z, S) → H 1 (Z 0 , S). By the
diagram we identify K with V 0 /V. We also have
0 −−−−→
V
y
−−−−→ T −−−−→ H 1 (Z, S) −−−−→ 0
y
y
e S) −−−−→ 0,
0 −−−−→ Vsing −−−−→ T −−−−→ H 1 (X,
and we identify H 1 (Y, θ) with Vsing /V, see Proposition 3.3.19. We will show below
that V0sur ⊂ Vsing . Thus V 0 /V ⊂ Vsing /V. That is K ⊂ H 1 (Y, θ).
We now prove that V0sur ⊂ Vsing . Let a1 , . . . , am be monomial generators for
ap,q,a . Let D = B[ aF1 , . . . , aFm ]. Then this is a graded ring, with the induced grading
from B. Thus we may write D = P/I, where P = B[z1 , . . . , zm ] is a free A-algebra,
and I = (g1 , . . . , gr ), with gi homogeneous of degree ci , say. Let t = {tα1 , . . . , tαm } ,
where α1 < · · · < αm . Consider also
DerC (A) = A
∂
∂
⊕ ··· ⊕ A
.
∂tα1
∂tαm
We consider this as a graded module with grading given by the grading of A and by
putting deg ∂t∂α = αi . Remark that the C-vectorspace of element of degree αm has
i
basis given by ∂t∂α , and that there are no elements of degree grater than αm .
m
1
We are going to use Proposition 4.7.11. To calculate TX/S
we use the exact
sequence
1
DerA (P ) → HomP (I, D) → TX/S
→ 0.
We have
HomP (I, D) ⊂ Dr = ⊕Bei
by sending a homomorphism to its evaluation on the generators, gi . The module
∂
⊕Bei is graded with deg ei = −ci . The module DerA (P ) is graded by deg ∂x
= −q,
∂
∂
deg ∂y = −p, and deg ∂zi = −di . The map
DerA (P ) → HomP (I, D)
lifts to
DerA (P ) → ⊕Bei
1
given by applying a derivation to the generators gi . Now clearly TX/S
injects into
the cokernel T of this last map, so we may consider the Kodaira-Spencer map to
map into T. It is clear that T is graded. Then it follows from [LP88] that
gsing : DerC (A) → T
is given by
∂
7→ classof
∂tαi
∂g1
∂gr
e1 + · · · +
er .
∂tαi
∂tαi
170
CHAPTER 4. MODULI OF SANDWICHED SINGULARITIES
∂g
Since deg ∂tαj ej = ci + αi − ci = αi , we see that gsing is homogeneous of degree 0.
i
Thus it follows that Vsing is a homogeneous submodule of DerC (A). In particular
Vsing has a system δ1 , . . . , δn of homogeneous generators. We have deg δi ≤ αm = a
and it is clear that deg δi = αm = a if and only if δi = ∂t∂α .
m
By Proposition 4.10.6, and an identification above, we have that
C(0). Thus there is a δ such that
∂
∂tαm
∈ Vsing ⊗
∂
+ δ ∈ Vsing .
∂tαm
Writing
δ=
X
hi
∂
∂tαi
with hi ∈ (tα1 , . . . , tαm ), then since deg hi < 0 it follows that deg δ < a. Thus it is
clear that ∂t∂α must be among the generators of Vsing . From the previous section
m
we have that V0sur is generated by Vsur and
that V0sur ⊂ Vsing .
The following result is now immediate.
∂
∂tαm .
Then since Vsur ⊂ Vsing , it is clear
Theorem 4.10.7. Let Y = Y(C,a) be a sandwiched surface and assume that C is of
quasihomogeneous type. Let K be as above. Then K ⊂ H 1 (Y, θ).
We conclude this section be summing up some of the properties of the KodairaSpencer kernel Vsing above.
Proposition 4.10.8. We have
i) Vsing is a homogeneous submodule of DerC (A).
ii) Vsur ⊂ V0sur ⊂ Vsing .
Bibliography
[AM69]
M. F. Atiah and I. G. MacDonald, Introduction to commutative algebra,
Addison-Wesley, 1969.
[And74] Michel André, Homologie des algèbres commutatives, Springer-Verlag,
1974.
[Art66]
Michael Artin, On isolated rational singularities of surfaces, Amer. J.
Math. 88 (1966), 129–136.
[Art69a]
, Algebraic approximation of structures over complete local rings,
Pub. Math. I.H.E.S 36 (1969), 23–58.
[Art69b]
, Algebraization of formal moduli: I, Global analysis, 1969, pp. 21–
71.
[Art74]
, Algebraic constructions of brieskorn’s resolutions, J. of Algebra
29 (1974), 330–348.
[Art76]
, Deformations of singularities, vol. 54, Tata Institute of Fundamental Resarch, Bombay, 1976.
[BC91]
Kurt Behnke and Jan Arthur Christophersen, Hypersurface sections and
obstructions (rational surface singularities), Compositio Math. 77 (1991),
233–268.
[BK87]
Kurt Behnke and Horst Knörrer, On infinitesimal deformations of rational
surface singularities, Compositio Math. 61 (1987), 103–127.
[BKR88] Kurt Behnke, Constantin Kahn, and Oswald Riemenschneider, Infinitesimal deformations of quotient surface singularities, Singularities (Warsaw,
1985), Banach Center Publ., no. 20, PWN, Warsaw, 1988.
[Bou74] Nicolas Bourbaki, Algebra I, Herman, Addison-Wesley, 1974.
[Buc81]
Ragnar O. Buchweitz, Deformations de diagrammes, deploiments et singularités très rigides, liaison algébrique, Thèses, Université Paris VII, 1981.
171
172
BIBLIOGRAPHY
[BW74] D.M. Burns, Jr. and Jonathan M. Wahl, Local contributions to global deformations of surfaces, Invent. Math. 26 (1974), 67–88.
[dJ98]
Theo de Jong, Determinantal rational surface singularities, Compositio
Math. 113 (1998), 67–90.
[dJvS94] Theo de Jong and Duco van Straten, On the deformation theory of rational surface singularities with reduced fundamental cycle, J. Alg. Geom. 3
(1994), 117–172.
[dJvS95]
, Deformation theory of sandwiched singularities, Preprint, 1995.
[EGA3]
3, A. Grothendick and J. Dieudonné, Élements de géométrie algébrique,
Pub. Math. I.H.E.S. 11 (1961), 17 (1963).
[EGA4]
4, A. Grothendick and J. Dieudonné, Élements de géométrie algébrique,
Pub. Math. I.H.E.S. 20 (1964), 24 (1965), 28 (1966), 32 (1967).
[Elk70]
Renée Elkik, Solutions d‘équations à coefficients dans un anneau hensélien,
Ann. Sci. École Norm. Sup., Paris 6 (1970), 553–603.
[FG65]
W. Fisher and H. Grauert, Lokal-triviale familien kompakter komplexer
manigfaltigkeiten, Nachr. Akad. Wiss. Göttingen II. Math.-Phys. Kl.
(1965), 88–94.
[GHP96] Gert-Martin Grüel, Claus Hertling, and Gerhard Pfister, Moduli spaces of
semiquasihomogenous singularities with fixed principal part, J. Alg. Geom.
6 (1996), 169–199.
[GP93]
Gert-Martin Grüel and Gerhard Pfister, Geometric quotients of unipotent
group actions, Proc. London Math. Soc., vol. 67, 1993, pp. 75–105.
[GP94]
, Moduli for singularities, Proc. of the Lille conference on sing.,
London Math. Soc., 1994, pp. 119–146.
[GPS]
Gert-Martin Greuel, Gerhard Pfister, and Hans Schönemann, Singular,
http://www.mathematik.uni-kl.de/ zca/Singular/Welcome.html.
[Had96] Caludia Hadan, Modulräume für ebene kurvensingularitäten, Dissertation,
Humboldt-Universität zu Berlin, 1996.
[Har77]
Robin Hartshorne, Algebraic geometry, Springer-Verlag, 1977.
[HIO88] M. Herrmann, S. Ikeda, and U. Orbanz, Equimultiplicity and blowing up,
Springer-Verlag, 1988.
BIBLIOGRAPHY
173
[Knu71] Donald Knutson, Algebraic spaces, Lecture Notes in Mathematics, vol.
203, Springer Verlag, 1971.
[Lak76]
Imre Lakatos, Proofs and refutations, Cambridge University Press, 1976.
[Lau71]
H. B. Laufer, Normal two-dimensional singularities, Annals of Mathematics Studies, vol. 71, Princton Universety Press, 1971.
[Lau73]
, Taut two-dimensional singularities, Math. Ann. 205 (1973), 131–
164.
[Lau79]
Olav Arnfinn Laudal, Formal moduli of algebraic structures, Lecture Notes
in Mathematics, no. 754, Springer-Verlag, 1979.
[Lip69]
Joseph Lipman, Rational singularities with application to algebraic surfaces and unique factorization, Pub. Math. I.H.E.S (1969), 195–279.
[LP88]
Olav Arnfinn Laudal and Gerhard Pfister, Local moduli and singularities,
Lecture Notes in Mathematics, vol. 1310, Springer Verlag, 1988.
[Mat86] Hideyuki Matsumura, Commutative ring theorey, Cambridge studies in
advanced mathematics, vol. 8, Cambridge University Press, 1986.
[New78] P. E. Newstead, Introduction to moduli problems and orbit spaces, Lecture
Notes in Mathematics, vol. 51, Springer Verlag, 1978.
[Sch68]
Michael Schlessinger, Functors on artin rings, Trans A. M. S. 130 (1968),
208–222.
[SG94]
Trond Stølen Gustavsen, Algebrakohomologi via modifikasjoner, Cand. scient. thesis, Universitetet i Oslo, 1994.
[Spi90a] Mark Spivakovsky, Sandwiched singularities and desingularization of surfaces by normalized nash transformations, Ann. of Math. 131 (1990), 411–
491.
[Spi90b]
, Valuations in function fields of surfaces, Amer. J. of Math. 112
(1990), 107–156.
[Ste]
Jan Stevens, Higher cotangent cohomology of rational surface singularities,
In preparation.
[Tju68]
G.N. Tjurina, Absolute isolatedness of rational singularities and triple rational points, Functional Anal. 2 (1968), 324–332.
174
BIBLIOGRAPHY
[Wah74] Jonathan M. Wahl, Equisingular deformations of plane algebroid curves,
Tans. A. M. S. 193 (1974), 143–170.
[Wah75]
, Vanishing theorems for resolutions of surface singularities, Invent.
Math. 31 (1975), 17–41.
[Wah76]
, Equisingular deformations of normal surface singularities,I, Ann.
of Math. 104 (1976), 325–356.
[Wah77]
, Equations defining rational singularities, Ann. Sci. École Norm.
Sup. 10 (1977), 231–264.
[Wah79]
, Simultaneous resolution and discriminantal loci, Duke Math. J.
46 (1979), 341–375.
[Wah87]
, The Jacobian algebra of a graded Gorenstein singularity, Duke
Math. J. 55 (1987), 843–871.
[Zar38]
Oscar Zariski, Polynomial ideals defined by infinitely near base points,
Amer. J. of Math. 60 (1938), 151–204.
[Zar73]
, Le probléme des modules pour les branches planes, Cours donné
au Centre de Math. de l’Ec. Polytech., Paris, 1973, with an appendix by
B. Teissier.
[ZS60]
O. Zasriski and P. Samuel, Commutative algebra, Springer Verlag, 1960.