This article appeared in a journal published by Elsevier. The... copy is furnished to the author for internal non-commercial research
advertisement

This article appeared in a journal published by Elsevier. The attached
copy is furnished to the author for internal non-commercial research
and education use, including for instruction at the authors institution
and sharing with colleagues.
Other uses, including reproduction and distribution, or selling or
licensing copies, or posting to personal, institutional or third party
websites are prohibited.
In most cases authors are permitted to post their version of the
article (e.g. in Word or Tex form) to their personal website or
institutional repository. Authors requiring further information
regarding Elsevier’s archiving and manuscript policies are
encouraged to visit:
http://www.elsevier.com/copyright
Author's personal copy
Progress in Oceanography 85 (2010) 171–179
Contents lists available at ScienceDirect
Progress in Oceanography
journal homepage: www.elsevier.com/locate/pocean
Predator–prey encounter rates in turbulent water: Analytical models
and numerical tests
Hans L. Pécseli a,*, Jan K. Trulsen b, Øyvind Fiksen c
a
Department of Physics, University of Oslo, Box 1048 Blindern, N-0316 Oslo, Norway
Institute of Theoretical Astrophysics, University of Oslo, Box 1029 Blindern, N-0315 Oslo, Norway
c
Department of Biology, University of Bergen, Box 7803, N-5020 Bergen, Norway
b
a r t i c l e
i n f o
Article history:
Received 8 July 2009
Received in revised form 24 January 2010
Accepted 27 January 2010
Available online 4 February 2010
a b s t r a c t
In aquatic environments the encounter rates between small predators and their prey are increased by
turbulence. We present an expression for the flux of prey into the detective sphere of a small self-propelled predator. We then test this model by direct comparison of theoretical encounter rates with predictions from a numerical experiment where the Navier–Stokes equation is solved explicitly. This allows us
to estimate encounter rates numerically under realistic small-scale flow environments, and to explore the
accuracy of a simple theoretical formulation of this process. Our analysis includes results for cruising and
spiralling motions, as well as pause-travel search behaviour. We find that the analytical model yield surprisingly accurate predictions for models including also the shape of the predator’s perceptive sphere and
turbulence conditions. This adds confidence to such simple approximations in applied models of predator–prey encounter rates for a wide range of scale sizes of the predator’s reactive volumes, their motility
patterns and turbulence levels.
Ó 2010 Elsevier Ltd. All rights reserved.
1. Introduction
A key driver of predator–prey interactions in turbulent environments is the rate of encounters between a predator and prey (Kiørboe, 2008). Accordingly, a range of theoretical models has been
developed to quantify the contribution of turbulence in prey
encounter rate in pelagic organisms such as larval fish and zooplankton. The earliest models assumed that both predators and
prey were moving passively with the local turbulent flow velocity
(Osborn, 1996; Rothschild and Osborn, 1988), but later the effect of
self-induced locomotion has been included into these models,
including different patterns of motion such as cruising and
‘pause-travel’ search behaviour (e.g. MacKenzie and Kiørboe,
1995). Although these models have been derived from mechanistic
principles, there has been a general lack of explicit tests of their
ability to predict encounter rates in turbulent environments. Models on predator–prey encounter rates form the basis of many biological applications, including feeding rates of larval fish and the
implications of environmental effects on their growth and survival
(e.g. Hinrichsen et al., 2002; Lough et al., 2005). Here, we perform
an explicit test of a simple analytical model by using an extensive
numerical simulation where the Navier–Stokes equation is solved
explicitly (Biferale et al., 2005, 2006). We are concerned mostly
* Corresponding author. Tel./fax: +47 22855637.
E-mail address: hans.pecseli@fys.uio.no (H.L. Pécseli).
0079-6611/$ - see front matter Ó 2010 Elsevier Ltd. All rights reserved.
doi:10.1016/j.pocean.2010.01.002
with the encounter processes, including effects of turbulent stirring of the waters as well as the self-induced motion of the predator. The encounter rates are trivially identical to the capture rate if
we assume capture with certainty upon encounter. For low turbulence levels this can be a good approximation, but high intensities
of turbulence can reduce the probability of capture at an encounter
(MacKenzie et al., 1994).
The main new results presented here consist of numerical tests
of analytical models. Our results show a surprisingly strong similarity between the analytical results and the numerical experiment,
adding confidence to the simple analytical models. We also conclude that the geometry of the search field can be included in models with very little bias in predicted turbulence-driven prey flux.
The validation of simple analytical models for the prey encounter
rate is particularly valuable for simulation studies of environmental
influence on feeding rates of fish larvae. Our numerical results are
obtained by data from direct numerical solutions of the Navier–
Stokes equation, as distinct from the synthetic turbulence modelling used by some other studies (e.g. Mariani et al., 2007).
2. Models
The present study considers analytical models for predator–
prey encounters in turbulent environments. The central new
element is a comparison of these analytical results with numerical
simulations. Several models for predator motions are considered.
Author's personal copy
172
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
Table 1
List of the most important symbols and their physical dimension.
Quantity
Symbol
Dimension
Turbulent energy dissipation per unit mass
Kinematic viscosity
Kolmogorov length scale
Kolmogorov time scale
Root-mean-square fluid velocity
Range of interception of a predator
Opening half-angle of the
cone of interception
e
m
g (m3/e)1/4
sK (m/e)1/2
trms
length2 time3
length2 time1
length
time
length time1
length
R
h
2.1. A model of Plankton encounter rates in turbulent water
Based on analytical models it has been argued (Osborn, 1996;
Boffetta et al., 2006; Pécseli and Trulsen, 2007) that the timeasymptotic average encounter rate J1 for passively drifting organisms scales as
1=3 7=3
J 1 ¼ C M n0 e
R
ð1Þ
;
with CM being a universal dimensionless numerical constant, n0 the
prey concentration and R the range of interception or prey detection
distance. Empirically, using both numerical and laboratory tests, we
find CM 6 for spherical surfaces (Mann et al., 2005; Boffetta et al.,
2006). The turbulence intensity is characterized by the dissipated
energy per unit mass fluid, e. A list of the most important physical
parameters is given in Table 1. We note that for water at room temperature we have the numerical value of the kinematic viscosity to
be approximately m = 0.89 106 m2 s1. The analysis giving (1) assumes that R is within the universal subrange of the turbulence, i.e.
R > g0. We also introduced g0 13g as an effective Kolmogorov
length scale (see Pécseli and Trulsen, 2007), with g being the Kolmogorov length scale (Tennekes and Lumley, 1972; see also Table
1). For herring larvae the prey detection distance R is
5 103 m (Blaxter and Staines, 1971), while it can be smaller
for copepods and other species (Bundy et al., 1998; Muelbert
et al., 1994). A list of characteristic values of turbulence parameters
in nature (Granata and Dickey, 1991; Kiørboe and Saiz, 1995) are given in Table 2. Our assumption that R is in the universal subrange
may not always be fulfilled, and the analysis has to be extended
and generalized for the cases where R is in the viscous subrange
(Pécseli and Trulsen, 2007). Most of our studies here are concerned
with the encounter process. The encounter rate is trivially identically to the capture rate if we assume capture with certainty upon
encounter (MacKenzie et al., 1994). Consequences of finite capture
probabilities will not be discussed here. The effects of finite inertia
and finite sizes have been discussed elsewhere for simple cases
without predator motion (Pécseli and Trulsen, 2007, 2008). Model
(1) also ignores the time spent by the predator for handling prey
(Visser, 2007).
The analysis giving (1) is essentially based on dimensional
arguments (Buckingham, 1914), and the resulting flux-scaling with
n0 e1/3R7/3 is universal and does not depend on the shape of the
encounter region, see Fig. 1. The surface of the encounter region
Table 2
List of characteristic turbulence parameters in nature.
Location
Dissipated energy
per kg fluid (m2 s3)
Kolmogorov
length-scale (m)
Kolmogorv
time-scale (s)
Open ocean
Shelf
Coastal
zone
Tidal front
e 1010–106
e 107–106
e 107–104
g 102–103
g 2 103–103
g 2 103–
sK 95–0.95
sK 3.0–0.95
sK 3.0–
2 104
0.095
e 105
g 5 104
sK 0.3
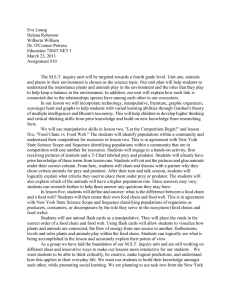
Fig. 1. Shapes of the perceptive volume considered in this work. In (a) we have the
simple spherical reference model with only one parameter R, while (b) shows a
more general conical volume, with two parameters R and h.
can be spherical or conical as long as the surface changes self-similarly with a certain length scale, R. A conical surface will serve just
as well as the spherical one, only with a new coefficient, replacing
CM. There are no other adjustable parameters. By following conical
surfaces in the flow, we have empirically determined these coefficients (Mann et al., 2006; Pécseli and Trulsen, 2007). The results
are best accounted for by keeping CM for the spherical surface and
introduce a correction factor in the range {0:1}. It turns out that this
correction factor is only weakly dependent on R being in the universal or the viscous subrange. In the following we denote this correction factor v(h), neglecting the weak dependence on R. Empirically
we find the analytical approximation v(h) 0.31h + 0.19h2 0.06h3, which is adequate for 0 < h < p/2. Hemispherical surfaces
are often used for modelling, but also other more pointed conical
surfaces have been considered (Lewis and Bala, 2006).
For the case where R is in the universal Kolmogorov–Oubokhov
subrange of the turbulence (Tennekes and Lumley, 1972), we can
ignore the effects of the kinematic viscosity m. Viscosity will, however, enter the expression for the encounter rate for smaller R. We
have the Kolmogorov time scale sK as a characteristic time for the
turbulent eddies with length scale g, where we can assume sK to be
the average time it takes a predator to cross a surface of interception that has g as radius. We may consider sK as the order of magnitude of time available for capture of prey crossing a spherical
volume of interception, when the radius of this sphere is g. The actual value of the prey detection range R depends on the species
considered, their age etc., but also on the local environment, for instance light conditions in visual predators (Fiksen and MacKenzie,
2002).
Here we extend the analysis by allowing for motion of the predators. Three cases are considered, a simple cruising motion, a spiralling orbit and the more typical pause-travel motion where the
predator is alternating between fast-forward jumps and passive
drifting.
2.2. Analytical models including predator movement: cruising motions
We first assume a cruising motion of predators, swimming in
straight lines at a constant velocity Vc, relative to the local fluid volume element participating in the turbulent fluid motions. The prey
is assumed to be passively carried with the flow.
In the absence of turbulent motions in the flow, we have the
simple result J/n0 = pR2Vc for the volume searched per unit time
(also termed clearance rate), assuming for the moment a spherical
prey detection range with radius R. Note that Vc is here a deterministic quantity, and not drawn from a random distribution. If average values of distributed cruising velocities are needed, these
have to be found by a subsequent averaging. The simple expression
Author's personal copy
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
for the searched volume has to be modified when the local flow is
in turbulent motion. The result has to fulfil some basic requirements, however: for small values of Vc we must recover the basic
result (1), i.e. have J1/n0 CMe1/3R7/3 v(h) with R > g0. For very
large values of Vc, on the other hand, the turbulent fluid motion
is immaterial and the clearance rate approaches J1/n0 pR2Vch(h)
asymptotically, where the factor h(h) = sin2h for h < 90° and h(h) = 1
for h > 90° corrects for the projected search area reduction for varying h. In between these two limits, the flux J1 has to increase
monotonically with Vc, for all other parameters fixed. The direction,
and thus the sign of Vc can not be relevant, and we require also that
the derivative of J1 with respect to Vc must vanish at Vc = 0. Finally,
we require that the predator does not encounter prey in the absence of turbulent mixing and self-induced motions, so that we
have J1 = 0 when both e = 0 and Vc = 0. A simple analytical form fulfilling these requirements is
J1
¼
n0
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðC M e1=3 R7=3 vðhÞÞ2 þ ðpR2 V c hðhÞÞ2 :
ð2Þ
Predators with small detection ranges will benefit most in terms
of prey encounter rate by self-induced motions since the power of R
in the first term is 14/3, while it is 4 for the second term, so the last
term will dominate as we reduce R. The result (2) has similarities
with existing formulations (e.g. Rothschild and Osborn, 1988; MacKenzie and Kiørboe, 1995), but the physical meanings of the terms
are different, for instance in their introduction of an uncorrelated
velocity associated with relative motion between predator and prey
independent of h. It is the ratio ðC M =pÞðe1=3 R1=3 =V c ÞðvðhÞ=hðhÞÞ of the
two terms in (2) that is important for estimating the importance of
turbulence, and not the absolute value of the turbulent velocity
fluctuations. By inspection of vðhÞ=hðhÞ, we find that the importance
of turbulence has a local minimum near h = 1.1 (in radians, corresponding to approximately 62°, within our model), for all other
parameters constant. This observation seems in variance with results quoted by Mariani et al. (2007).
The predator velocity Vc entering (2) is a deterministic quantity.
The swimming speed of the predatory species in question can vary
considerably between different individuals. Given a statistical distribution of these swimming velocities from observations, as shown
for instance by Galbraith et al. (2004), the ensemble average hJ1i
can be obtained. It is not admissible simply to replace V 2c by hV 2c i
pffiffiffiffi
in (2). The distribution PðV c Þ ¼ 4V 2c expðV 2c =D2 Þ=ðD3 pÞ for the
predator velocity can be used as an approximation to the experimental results of Galbraith et al. (2004). With this model we obtain
an analytical expression in the form <J1>/n0 = (CMe1/3R4/3v(h))2
exp(Z2/2) K1(Z2/2)/(Dp3/2h(h)), in terms of the modified Bessel function of the second kind K1, and Z ¼ ðC M =pÞðe1=3 R1=3 Þ ðvðhÞ=hðhÞÞ=D
with D being the width of the distribution.
It is often assumed that for turbulence to be irrelevant Vc must exceed the root-mean-square turbulent velocity fluctuations, hu2i1/2 trms, with u being the fluctuating fluid velocity. This is unduly restrictive as we have trms e1/3R1/3 as long as R is much smaller than the
Eulerian integral length scale, i.e. the large outer scale of the turbulence (Tennekes and Lumley, 1972).
2.2.1. Particle trajectories in Eulerian and Lagrangian frames
To illustrate the significant simplifications achieved by the use
of Buckingham’s P-theorem that was used in obtaining for instance (1), we here briefly outline the general mathematical form
of the analysis. Some illustrative numerical results are included
also.
We denote the space–time varying turbulent velocity field by
~
uð~
r; tÞ and the predator velocity with respect to the local volume
element of the flow by ~
V. For cruising motions we let ~
V be a
constant vector. The flow velocity field in the reference frame of
173
~~
the moving predator is Uð
r; tÞ where ~
r ¼~
n is the predator position.
~
~
The analytical expression of Uðr; tÞ in terms of ~
uð~
r; tÞ and ~
V is complicated since it depends on the self consistent trajectory ~
nðtÞ folRt
~~
nð0Þ: A
nðsÞ; sÞ ds þ ~
lowed by the predator, where ~
nðtÞ ¼ 0 Uð
~~
r; tÞ ~
uð~
r; tÞ þ ~
V where ~
V is statistically indesimple model like Uð
pendent of ~
uð~
r; tÞ will be in error.
The particle (here prey) flux into a spherical volume of interception is trivially given by a surface integral of the velocities of the
individual particles in the flow and need not be written explicitly
here. The information that is relevant for the problem is obtained
by an ensemble average of all realizations of the process. Several
quantities are randomly distributed: first the number of particles
in the immediate vicinity of the surface and then the velocities of
these particles. We can assume that these two quantities are statistically independent. A simplification of the problem can be obtained by a fluid model, where we introduce an average over all
particle distributions and use a continuous space–time varying
prey density nð~
r; tÞ. With this representation we have the average
prey flux to the surface being
Z
_
_
~~
~~
hJðtÞi ¼ nð~
r; tÞ Uð
r; tÞ s ð1 HðsignðUð
r; tÞ s ÞÞÞ dS
ð3Þ
S
_
~~
where Uð
r; tÞ is a continuous flow-field in a given realization and s
is a unit vector pointing out of the volume. The subscript S denotes
that the integral is to be evaluated over the encounter surface (not
necessarily spherical). We introduced Heaviside’s unit step function
(H(x) = 1 for x P 0 and H(x) = 0 for x < 0) to ensure that only particle
fluxes into the volume of interception contribute! It is not possible
to solve (3) except in some simple model cases. Sometimes simplifying assumptions are made concerning the flow-field. In the literature one can find terms like ‘‘representative flow velocity” or
simply turbulent velocity w with an estimate w (eR)1/3 (MacKenzie and Kiørboe, 1995). Indeed, by inspection of a flow field as the
one shown in Fig. 2 it might be tempting to identify one such representative velocity. In the present context, this figure refers, however, to the wrong (Eulerian) frame of reference: we have to
consider the particle trajectories in the moving (Lagrangian) frame
of reference, the one that follows the predator. This is shown in
Fig. 3, (where we for simplicity took V = 0) with a noticeably different appearance. (Figs. 2 and 3 are representative for any value of R
in the universal subrange of the turbulence.) The important observation is that in the Lagrangian frame of reference, the velocity field
~~
Uð
r; tÞ in (3) varies significantly over the surface of interception
Fig. 2. Trajectories for 20 point-particles in the Eulerian or rest frame. The particles
are initially confined to a sphere of radius R/g = 20. The figure allows a three
dimensional, stereoscopic view. Units on axes are in computational units. The heavy
line shows the reference predator. The figure is representative for R being in the
universal subrange. For comparison we have the scale size of the largest energy
containing eddies to be 3 in the present computational units.
Author's personal copy
174
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
Table 3
Simulation A (second column) lasts 1167 time steps with dt = 0.005, simulation B
(third column) lasts 1841 time steps with dt = 0.0023. The Kolmogorov length scale is
here g and the specific energy dissipation is e, while sk is the Kolmogorov time scale.
The Reynolds number is Rek, while T is the duration of the simulation in
computational time units. The system size is 2p 2p 2p in both cases (in
computational units).
Quantity
Simulation A
Simulation B
dx
2p/512 = 0.012272
2.05 103
0.8853212
3.01
183
0.00993 = 0.81dx
0.048
5.84
2p/1024 = 0.0061359
8.8 104
0.810878
2.96
286
0.0054 = 0.88dx
0.033
4.23
m
e
E = 1/2hu2i
Rek
g
sk
T
Fig. 3. Trajectories for the 20 point-particles in Fig. 2 now shown in the Lagrangian
or co-moving frame for the particle in the center. The reference predator is
represented by a point in this co-moving frame, and therefore not noticeable. The
self-induced motion of the predator is ignored here for simplicity.
when its characteristic length scale (i.e. the radius R) is in the universal subrange of the turbulence. The significant difference between Figs. 2 and 3 is due to the large eddies, where most of the
turbulent energy is. These large eddies give rise to a simple translation of both predator and prey when their separation distance is
small. It is basically this translational velocity that is removed by
going from the Eulerian frame in Fig. 2 to the Lagrangian frame in
Fig. 3. The simplification of avoiding the integral and the ensemble
averaging in solving (3) is considerable. The expense for the use of
Buckingham’s P-theorem is that we treat the specific energy dissipation rate e as a deterministic quantity and ignore intermittency
effects due to the statistical space–time variation of e over the
ensemble. Our experimental (Mann et al., 2005, 2006) as well as
numerical studies (Boffetta et al., 2006; Pécseli and Trulsen, 2007)
indicate that these intermittency effects are of minor consequence,
at least for the present problem.
Figs. 2 and 3 allow a three dimensional, stereoscopic view by
focusing the eyes approximately 20 cm behind the plane of the
paper or computer screen. It requires a little exercise. In our experience, the distance to the eyes is not so critical provided it is
sufficiently large, but it is essential that the figure is kept plane
and horizontally aligned with the observers eyes. A similar type
of presentation of curves in three dimensions was used in several
presentations, for instance by Morse and Feshbach (1953), where
many examples are found.
2.2.2. Numerical and laboratory validation experiments: cruising
motions
The analytical result (1) has been tested in a laboratory experiment, where small neutrally buoyant polystyrene particles could
be followed with high accuracy (Mann et al., 2005, 2006). As an
additional validation, we used results from numerical simulations
where the Navier–Stokes equation was solved explicitly (Biferale
et al., 2005) to give the entire turbulent flow field as a function
of spatial coordinates and time (Boffetta et al., 2006; Pécseli and
Trulsen, 2007). Point particles were followed as they were moving
in this flow, representing prey as well as predators moving passively with the flow just as small polystyrene particles in the laboratory experiment (Mann et al., 2005). Very good agreement
was found between the laboratory results and those found by the
numerical simulations. The present analysis is similar to the one
used for data from the laboratory experiment (Mann et al., 2005).
It is practically difficult to do laboratory experiments for self-propelled particles, and we have to rely on the numerical experiment
in this case. However, there is no reason to believe that the correspondence between numerical and laboratory experiments should
be less for the case of a moving predator.
In the present case we have positions and velocities for approximately 105 trajectories of simulation particles, followed for more
than 1800 time-steps in the largest one of the two simulations.
Details are given in Table 3. The relations between the dimensionless numerical and the dimensional physical parameters were
discussed by, for instance, Boffetta et al. (2006). We can include
self-induced velocity of the predator with respect to the fluid element where it is located, this fluid element itself participating in
the turbulent motion. The predator used here can thus not be associated directly with any of the simulation particles, only if it is passively following the flow. We do not have the entire space–time
varying flow field available and has thus no direct numerical value
for the flow velocity at the self-propelled predator’s position. We
therefore interpolate the flow velocity at the predator position by
using the four nearest simulation particles. Initially in the simulations, these particles are uniformly distributed, at later times they
will be mixed by the turbulence. The interpolation thus has to be
performed on a non-uniform grid. The contributions of the various
particles to the estimated local flow velocity are weighted, so that
the nearest particle has the strongest weight, etc. We do this by
using an approximation to the local conditional average (Adrian,
1979; Pécseli and Trulsen, 1991; Mann et al., 2006), the condition
being the given flow velocities at the four nearest particle positions. The accuracy of the interpolation routine can be tested by
following a passively moving test particle with the routine and
compare with a simulation particle. We find good overall agreements. The Reynolds numbers of the two simulations are representative also for flow conditions met with in nature. More generally it
can be argued that since the suggested analytical results (1) and (2)
are well satisfied for a wide range of parameters R and h, the results
can be applied with confidence also in other cases.
The expression (2) is then amenable for a test with the given
numerical database (Biferale et al., 2005, 2006; Boffetta et al.,
2006). We interpolate the flow field from the database of point particle velocities, and let the centre of the virtual detective sphere (or
the apex for a conical volume, see Fig. 1) move with a velocity Vc
relative to the local fluid volume.
2.2.3. Testing the analytical model of a cruising predator with the
numerical database
The flux over the surface of the perceptive volume can be determined for different velocities Vc and radii R. Here we use R/g = 25,
50, and 75. All R-values mentioned are in the universal subrange of
the turbulence. The analysis is carried out for two different simulations, as indicated by full and dashed lines in Fig. 4. The two simulations differ by the value chosen for the kinematic viscosity and
the energy dissipation rate, and also the numerical resolution is
different by a factor of two. Due to the large database we can present results with high accuracy: the error bars are smaller than the
symbols in these figures. For the averaging, we followed 8 104
Author's personal copy
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
175
Fig. 4. The prey encounter rate for a predator cruising with a constant velocity Vc with respect to the local fluid volume. For the case in (a) we have h = 180°, corresponding to
a sphere. We have h = 90° in case (b), corresponding to a hemi-sphere and h = 45° in case (c). In all cases we have three radii, R/g = 25, 50, and 75 in computational units, the
largest radius corresponding to the top curve, with the smaller ones successively below. The dashed and full lines give the analytical result (2) for two values of the kinematic
viscosity and two slightly different dissipation rates, see Table 3. Asterisks and diamonds are corresponding results from the corresponding numerical simulations.
simulation particles, representing predators, while all other passively moving particles represented prey. Predators are considered
one at a time, so they are not competing for prey.
The perceptive field of predators in the present study may be
spherical or conical (Lewis and Bala, 2006). For the latter, we
assume that the axis of the cone always points along the direction
of the velocity vector Vc of the self-induced motion. The angle of
the cone-axis with respect to the local turbulent flow velocity vector
is varying randomly. The clearance rate for the large velocity limit
has to be modified when h < 90°. This correction factor is obtained
simply by replacing R with R sin h in the second term in (2), as already
mentioned. Results for h = 180°, 90° and 45° are shown in Fig. 4. The
first term in (2) also has a correctional factor for opening angles
different from h = 180° (Mann et al., 2005; Pécseli and Trulsen,
2007), and this is taken into account in Fig. 4. The numerical results
show remarkable agreement with the suggested analytical model
(2) for a wide range of velocities Vc measured in units of the rootmean-square turbulent fluid velocity trms for the two databases
available from the numerical simulations (see Table 3), as indicated
by full and dashed lines on the figures. Both cases are included here
to demonstrate that our results are robust.
2.3. Spiralling predator motions: will predators enter prey-depleted
volumes?
To generalize the previous results for cruising motions, we analyze also spiralling predator orbits. The analysis is carried out in
Fig. 5. Example of spiralling motion of a predator, in this case with a relatively large
velocity, Vs = 2trms. The blue line shows the predator motion in the absence of
turbulence, the green line gives the trajectory for a predator released at the same
initial position, but passively following the flow, and finally the red line gives the
actual trajectory, i.e. including self induced and turbulent motions. The figure
allows a stereoscopic view.
the same way, by following prescribed motions of the predator
with respect to the local fluid volume, with the fluid itself being
in turbulent motions as before.
In Fig. 5 we show an example of a spiralling motion of a predator, in this case with Vs = 2trms. The blue line shows the spiralling
predator motion in the absence of turbulence, while the green line
gives the trajectory for a predator released at the same initial position, but passively following the flow. Finally the red line gives the
actual trajectory, i.e. including self-induced motion with respect to
the local fluid volume and in addition the turbulent motions. The
axis of the spiralling motion is in all cases taken to be vertical, corresponding for instance to a predator orienting itself towards light.
All curves in Fig. 5 start at the same position. Different realizations
of figures like five can appear very different, depending on the local
flow velocity.
Results from the analysis of spiralling orbit are shown in Fig. 6,
again for h = 45°, 90° and 180°. We used here a compact spiral,
optimal in the sense that the orbit gives non-overlapping volumes
for quiescent environments. The analytical expression (2) was argued for cruising motions, but we use it here as an ad hoc model
for spiralling motions as well, denoting the characteristic velocity
by Vs. The agreement is still acceptable, indicating that (2) can be
used for general motion strategies, provided they are generated
with non-overlapping volumes for quiescent environments as in
Fig. 6. The numerical results in Fig. 6 fall slightly below the analytical curve. Due to the turbulent mixing, there is a slight probability
for the spiral trajectory to enter fluid elements that have been depleted for prey earlier. We find that the decrease in encounter rate
is moderate at Vs = 2trms. The decrease from the proposed simple
analytical model is less than 15%. We have also analyzed a less
optimum case, where, in the absence of turbulence, the predator
would be moving in a circle with radius R with respect to the local
fluid volume. In quiescent flows this orbit would give a vanishing
encounter rate after one ‘‘turn” of the predator in the orbit, since
all of the volume within the surface of encounter has been
searched already. Overlap of search volumes (as discussed by e.g.
Mariani et al., 2007) does not seem to be significant for the parameter ranges covered by the present analysis. Also here the self-induced motion is of little relevance for small Vs. Figs. 4 and 6 are
quite similar in spite of significant differences in the relevant orbits
being used, demonstrating that the turbulent motions dominate
the result for the given velocity intervals.
Seemingly the difference between the rectilinear cruising, and
spiralling motions is small for the present conditions. There is,
however, an advantage in the spiralling orbit, when the predation
risk is considered: if a volume is void of predators of our reference
predator, it is an advantage to explore it in detail by a spiralling
motion, rather than being exposed to a predation risk by moving
Author's personal copy
176
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
Fig. 6. The prey encounter rate for a predator in a spiralling motion with a constant velocity Vs with respect to the local fluid volume. For the case in (a) we have h = 180°,
corresponding to a sphere. For case (b) we have h = 90°, corresponding to a hemi-sphere and in case (c) we have h = 45°. In all cases we have three radii, R/g = 25, 50, and 75.
a long distance by cruising (Visser, 2007). Only little will be gained
by expanding the spiral orbit by increasing its radius and pitch as
compared to the reference case studied here. If, on the other hand,
the orbit is made tighter, the probability is increased for re-entering a fluid element that has already been depleted for prey. This
will be most conspicuous for large predator velocities, where the
turbulent motions are less important. We investigated a case
where the pitch in the spiral was R/2. In the case where we have
no turbulent motions the predator will at each instant have an
overlap of 1/4 of the volume that has been searched already. Indeed we found that the encounter rate was noticeably reduced
for large Vs (where turbulent motions are immaterial) for any of
the radii studied here. For small Vs, on the other hand, the turbulent motions were dominating, and the details in the trajectory
have less importance.
2.4. Pause-travel (saltatory) search behaviour: analytical model
The foregoing analysis assumed the predator to be moving continuously. To extend the analysis to include pause-travel predators
we consider the following model in terms of an initial value problem, and continue the analysis until a steady state has been
reached. The analysis of spiralling, cruising and pause-travel predator is the same as far as the turbulent motions are concerned. A
predator is thus introduced into a turbulent flow at some initial
time, t = 0. Within a short time Dt, we let the predator travel and
then capture all prey in the perceptive volume, which is here assumed to be spherical, with a given radius R, as before. The expectation value of the number of encountered prey is Upn0, with Up
being the search-volume of the predator. For instance the hemispherical model (MacKenzie and Kiørboe, 1995) has Up = (2p/
3)R3. Implicitly it is assumed that the deformation of this volume
due to the turbulent flow is negligible during the time interval Dt.
During a subsequent given time interval T we let the predator
be at rest with respect to the local fluid element and capture prey
that is swept into its perceptive volume due to the turbulent mixing in the fluid. This latter process is the one we have analyzed before (Boffetta et al., 2006; Mann et al., 2005), but this time it is
necessary to take the time dependence of the encounter rate into
account. At the initial time, the prey concentration in the local
environment is at maximum, since no prey outside the sphere of
interception has been captured yet. At later times the average concentration in the local surroundings of the predator will be reduced
because fluid elements that have been encountered before (and
therefore void of prey), are swept towards the predator. Simultaneously the turbulent motions mix prey from larger distances into
the near field of the predator (Lewis and Pedley, 2000). The balance
of the two effects will eventually form a steady state spatial prey
distribution, as illustrated by Mann et al. (2006) and Boffetta
et al. (2006) or Pécseli and Trulsen (2007). We have an empirical
expression for the expectation value of the time dependent predator–prey capture rate (Boffetta et al., 2006) in the universal subrange of turbulence:
hJi ¼ n0 R7=3 e1=3 vðhÞFðt e1=3 =R2=3 Þ:
ð4Þ
For the universal function F, we found a phenomenological
expression in the form
F ¼ A þ B expðCt e1=3 =R2=3 Þ;
ð5Þ
where empirically A = 5.9, B = 1.3, and C = 1.3, respectively, for the
spherical case (Boffetta et al., 2006). All quantities A, B, and C are
dimensionless. Results from laboratory experiments (Mann et al.,
2005) give slightly larger numerical values, but with a significantly
larger statistical spread. Since v(h) appears as a multiplier on F in
(4), we can let v(h) be incorporated into A and B for the general case
for arbitrary h. It is important that the function F reaches an asymptotic limit A for t ? 1, a result that has an analytical basis (Mann
et al., 2005). The numerical results of Boffetta et al. (2006) refer
to the limiting case where capture is certain upon encounter. The
other limit where only encounter rates without capture are considered we have C = 0 and F = A + B = 7.2 being a universal constant.
Now the prey concentration is no longer depleted, so it remains
n0 at all times.
At a time t = T + Dt, we let the predator jump in an arbitrary
direction to a new position at a distance L. Again the local volume
of interception is depleted for prey, but now it is not a priory certain that the local prey concentration is n0, this will depend on L: if
it is too small there is a large probability of arriving at a volume
element that has been partly depleted already, and L is therefore
one of the parameters that deserves particular analysis, as also
illustrated by our study.
This process is then repeated for every subsequent time interval
of length T + Dt. All parameters are taken to be deterministic, and
the consequences of a statistical distribution can be analyzed subsequently. It is important that although L might be sufficiently
large at the first jump to allow the local prey concentration to be
approximated by n0, it need not be so at successive jumps. Our previous studies (Mann et al., 2005; Pécseli and Trulsen, 2007) indicated that the local prey concentration at a distance larger than
approximately 4R could be well approximated by n0, but we also
found that for short distances there was a significant depletion in
the average prey concentration. In natural conditions, there will
be other sources and sinks of prey, which we ignore here.
A simple analytical model can be formulated for the case where
L is sufficiently large to allow the local concentration at any new
subsequent position to be n0. From an evolutionary perspective,
one could argue that larvae are adapted to jump distances that
maximize search efficiency while minimizing costs. For simplicity,
we restrict the analysis to the case where the encounter surface is
spherical. In this limit we have the prey encountered at the initial
Author's personal copy
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
177
time interval to be (4p/3)R3n0. This initial contribution is independent of turbulent fluctuations and is for definiteness called direct
capture in the following. In a subsequent time interval T that follows Dt we find the contribution by integrating (4) with (5) over
the interval T to give the net result for the encountered prey in
the entire time interval T + Dt
NTþDt ¼
4p 3
B
R n0 þ ATn0 e1=3 R7=3 þ ½1 expðC T e1=3 =R2=3 Þn0 R3 :
C
3
ð6Þ
The first term is the direct encounter defined before, while the
last two terms originate from the turbulent transport into the
encounter range of the predator. Implicit in the model we have
the assumption of prey passively following the motions of the flow,
as before. For large T we find the particularly simple approximation
NTþDt 4p B 3
R n0 þ ATn0 e1=3 R7=3 :
þ
C
3
ð7Þ
By assuming T and Dt to be deterministically known quantities,
we can obtain the amount of prey captured in any large time interval by use of (6) or (7) by inserting the values of the relevant
parameters, A, B, C, e, n0, and R. For statistically distributed times
T we can perform the required statistical averaging once the distributions of T are known. Using (7) we find almost trivially that
hNTþDt i 4p B 3
R n0 þ AhTin0 e1=3 R7=3 ;
þ
C
3
ð8Þ
while a detailed derivation using the more general result (6) requires knowledge of the actual distribution of T. The ratio between
the direct capture contribution (the first term in (6)) and the turbulence contribution is
4p
3
A T e1=3 R2=3 þ CB ½1 expðC T e1=3 =R2=3 Þ
R2=3 4p=3
TAe1=3 þ R2=3 B=C
;
ð9Þ
where the approximation is valid for large time intervals T. On the
other hand, if T is small compared to R2/3/e1/3, corresponding to frequent jumps, we expand the exponential in the denominator of (9)
and find the ratio corresponding to (9) as
R2=3 4p
:
3ðA þ BÞT e1=3
ð10Þ
The expression corresponding to the direct capture is included
in other analytical results (e.g. MacKenzie and Kiørboe, 1995),
but there the effects of turbulence seem to be introduced somewhat ad hoc, and ignores for instance the time variation of the turbulent prey flux into the capture range of the predator.
We here present numerical results only for one choice of Dt/T,
although we studied also others. The numerical values for the ratio
Dt/T given in the literature have a significant variation for different
species. When the analytical results have been tested with good
agreement for this choice of Dt/T, they can be applied with confidence also for other values.
2.4.1. Tests of analytical results: pause-travel search behaviour
In order to test these predictions we extended our numerical
simulations. A predator is released at t = 0 in a uniform concentration of prey, n0, where it consumes all prey in the volume of interception and all prey that subsequently enters through the surface
of interception due to the turbulent mixing. After a given time,
T + Dt, the predator makes a jump of length L in a randomly chosen
direction, and the process is repeated. Ensemble averaged results
are shown in Fig. 7 for a fixed radius R in the spherical surface of
interception, as function of time and for different values of the
jump length. Since the initial concentration is the same for all jump
distances, the first time sequence 0 (T + Dt) is the same in all
Fig. 7. Encountered prey per unit time (i.e. the prey flux to the surface of
interception) for unit density for a predator with radius R/g = 110 in a spherical
surface of interception. Curves are shown as functions of time and for different
values of the jump length L measured in units of R. The results shown are averages
over a large number of realizations. The narrow vertical columns, with time
duration Dt, represent the direct captures, i.e. the prey encounters that are
independent of turbulent transport into the perceptive volume. These are reduced
by a factor 0.25 of their actual magnitude in order to improve the presentation. We
have Dt/(T + Dt) = 2/25. We show the average of 80 103 predators.
cases. When L is small (i.e. L < 2R 3R) the predator is likely to enter volume elements that are partially depleted of prey already,
and the averaged capture rate decreases. As L is increased, new,
or ‘‘fresh”, fluid volumes are entered, and the process becomes
close to the one experienced in the initial time interval. The initial
‘‘spikes” in Fig. 7 represent the direct capture defined before. The
subsequent drop in encounter rate (i.e. prey flux to the surface of
interception) demonstrates that it takes some time before new
prey enters due to the turbulent mixing.
To illustrate the results in more detail, we present the timeintegrated encounter rates as obtained at several successive jump
intervals. In Fig. 8a) we have the prey captured directly for varying
values of the jump length L. The results are normalized with the
expected asymptotic value for large jump lengths, as given by
the first term in (6). As explained before, we find that the actually
captured prey number is smaller than this asymptotic limit when
L < R, to increase and becoming close to the asymptotic level when
L > 3R. In Fig. 8b) we show the time integrated value of the prey
flux to the surface of interception for the time between direct captures, i.e. for integration time intervals of duration T. We normalize
the integrated results by the corresponding part of the analytical
Fig. 8. Time-integrated normalized capture rates as obtained after several jumps. In
(a) we show the directly captured prey for varying values of the jump length L. In
(b) we show the normalized prey flux to the surface of interception integrated over
the time between direct captures. We normalize the integrated results by the
corresponding parts of the analytical expression (5). We have R/g = 110.
Author's personal copy
178
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
expression (6). If the analytical result had been exact, the asymptotic level had been unity, and the deviation can be taken as an
expression for the accuracy of (6). Both Fig. 8a and b contain several curves, one for each successive jump interval T. The top curve
refers to the first jump interval and is independent of L, as expected
since this initial part is the same for all cases. We find that the
curves for the second and third jump interval are almost identical,
demonstrating that the process saturates almost immediately.
There is minor difference between the integrated encounter rate
in the second and in the asymptotic jump intervals.
We have analyzed the problem for several combinations of
parameters. The results shown here are representative for the variations found and also for the agreement between analytical
expressions and numerical simulation results. As mentioned, all
parameters were assumed to be deterministic. The consequences
of statistically distributed jump lengths, and time intervals are easily introduced, but we find the present results to be more readily
accessible.
2.5. Consequences of finite prey handling times
The basic result (1) ignores the time spent by the predator for
handling prey (Visser, 2007). When the time between encounters
is large (as for low prey concentrations), this assumption is appropriate. We can outline here a generalization of the previous results
to include this effect as well, and also point out some nontrivial
assumptions necessary to obtain a simple closed result.
First we let the encounter rate J be a deterministic quantity, and
have the time between encounters be 1/J. We let the time for handling of prey be h. The ingestion rate (Visser, 2007), taken to be the
inverse of the time from one capture to the next including now also
the handling time, is then
I¼
1
J
¼
:
h þ 1=J 1 þ Jh
ð11Þ
While it is acceptable to let h be deterministic and constant for
given species, we know that J is statistically distributed in part because prey is randomly distributed in space and in part due to the
turbulent mixing in the environment by the randomly varying flow
velocity. We need to obtain hIi rather than I itself. The statistical
distribution of J can be obtained experimentally (Pécseli and Trulsen, 2007), but this is of little use for a closed analytical expression,
unless it is fitted by analytical forms. In case the second term in the
denominator in (11) is small we can expand I J h J2 and the
averaging is simplified. Writing J = hJi + J0 with hJ0 i = 0, we find
hIi hJi h (hJi2 + hJ0 2i). Alternatively, we can postulate an approximation of the average of the second fraction in (11) as a ratio of
two averages, and find by using (1)
hIi ¼
J
hJi
C M n0 e1=3 R7=3
;
¼
1 þ Jh
1 þ hhJi 1 þ h C M n0 e1=3 R7=3
ð12Þ
although in general such an approximation can be questionable.
The previous results (11) and (12) assume both prey and predator to be passively moving with the flow. In the foregoing analysis
we have implicitly assumed h to be negligible. If, for instance, n0 is
small we can neglect the second term in the denominator in (12)
and recover (1). The approximation implied in (12) can be tested
for models with a postulated probability density for J. If we for instance take a Rayleigh distribution P(J) = (J/r2) exp((J/r)2/2) we
can solve the original expression as well as the approximation analytically. For the full result we find a lengthy expression that need
not be reproduced here, while the approximation becomes very
simple. The two results are close only when h is small.
3. Conclusion
We obtained an analytical expression for predator–prey
encounter rates in turbulent environments and tested it by use of
numerical models. We found an excellent agreement between
the analytical result (2) and the numerical study for the reference
case with spherical surfaces of interception. For conical surfaces,
the agreement with (2) was slightly reduced, but for practical
applications even these results can be used with great confidence.
The numerical methods used here can be generalized also to other
motion strategies, allowing for a comparison in terms of predator–
prey encounter rates in turbulent environments.
For quiescent flows there are obvious arguments for the importance of choosing motion strategies that avoid overlap with volumes that has been searched for prey already. In a turbulent
environment the turbulent mixing dominates the encounter rate,
unless the predator velocity is much larger that a relevant turbulent fluid velocity, to be measured for instance by the root-meansquare velocity. We show illustrative cases in Fig. 4 and in Fig. 6
for two different motion strategies. Even modest turbulence levels
may distort the actual predator trajectories significantly. We may
argue that a choice of orbit (spiralling vs. cruising) will have little
consequence for the average encounter rate in a turbulent flow,
and the relevance of the orbit for the survival of the predator is expected to be associated with other aspects of motion, the predation
risk, for instance.
Provided the radius of the spiralling orbit and the spiral pitch is
larger than the radius in the surface of interception, we find only
small differences between the encounter rates for spiralling and
cruising motions. Figs. 4 and 6 are quite similar in spite of significant differences in the relevant orbits being used, demonstrating
that the turbulent motions can dominate the result even for significant predator velocities. Spiralling orbits can have an advantage
by confining the motion, and thereby reducing predation risk, i.e.
if a large volume is found to be void of predators, it is beneficial
to search it for prey rather than to venture into new risky regions
by a cruising motion. In addition to reducing predation risk, another benefit of a spiral orbit is a more thorough search of an area,
which would lead to higher encounter rates if prey is distributed in
patches. This scenario implicitly assumes low turbulence levels;
otherwise the patches of prey will be mixed.
Studying travel-pause predators we separated the analysis of
the direct capture (which in our model does not contain turbulence
contributions) and the capture rate affected by the turbulence. The
two processes were assigned two time scales Dt and T, respectively, where Dt contains the time-duration of the ‘‘jump” and also
the ensuing time of capturing the prey in the volume element
being entered. The results are illustrated by the time-integrated
capture rates, where the integration is over one pause-travel period. The results shown in Fig. 8a and b are normalized by analytical
results obtained via the expression (6). We find that the jump
length is an important parameter. In order to have a high probability of entering fluid volumes that have not been depleted before, it
seems necessary to have a jump length exceeding 3R in terms of
the radius R in the sphere of interception. This result remains qualitatively accurate also for hemispherical or conical surfaces, where
R is defined in Fig. 1b for these cases. In the limit of large jump
lengths we find good agreement between analytical estimates
and our numerical results. The analysis takes into account the time
variation of the turbulent encounter rate. We have obtained simple
analytical expressions (9) and (10) for the relative importance of
the direct and the integrated captures, these expressions being valid for different limiting cases. Our reference case is for simple
spherical detection volumes, but our analysis contains an analytical prescription for obtaining the correction for finite opening
Author's personal copy
H.L. Pécseli et al. / Progress in Oceanography 85 (2010) 171–179
angles in a conical volume. Conical search volumes with h < 90° can
be used to model the wedge shaped search volumes used in other
studies (Mariani et al., 2007).
The results confirm the accuracy of analytic models of predator–prey encounter rates in turbulent environments. The models
tested are similar to models that are applied frequently in the literature, but we have included a flexible term for the geometry of
the predator’s perceptive field. We conclude that the geometry of
the perceptive volume has minor influence on the difference between the analytical and the numerical estimates, and are accurately predicted by the analytical models presented here.
Acknowledgements
Parts of this study were supported by the Norwegian National
Science Foundation. We thank Svein Sundby and Jan Erik Stiansen
for valuable discussions. The database used for the numerical
simulations can freely be downloaded from the web address
http://cfd.cineca.it/. Conditions for usage are given at http://cfd.
cineca.it/cfd/repository/folder.2006-01-20.4761556357/document.
2006-01-20.5299514280/. The supercomputing center Cineca
(Bologna, Italy) is acknowledged for hosting the data.
References
Adrian, R.J., 1979. Conditional eddies in isotropic turbulence. Physics of Fluids 22,
2065–2070.
Biferale, L., Boffetta, G., Celani, A., Lanotte, A., Toschi, F., 2005. Particle trapping in
three-dimensional fully developed turbulence. Physics of Fluids 17, 021701.
Biferale, L., Boffetta, G., Celani, A., Lanotte, A., Toschi, F., 2006. Lagrangian statistics
in fully developed turbulence. Journal of Turbulence 7 (7), 1–12.
Blaxter, J.H.S., Staines, M.E., 1971. Food searching potential in marine fish larvae. In:
Crisp, D.J. (Ed.), Proceedings of the 4th European Marine Biology Symposium.
Cambridge University Press, Cambridge, UK, pp. 467–485.
Boffetta, G., Pécseli, H.L., Trulsen, J., 2006. Numerical studies of turbulent particle
fluxes into perfectly absorbing spherical surfaces. Journal of Turbulence 7 (22),
1–16. doi:10.1080/14685240600573138.
Buckingham, E., 1914. On physically similar systems; illustrations of the use of
dimensional equations. Physical Reviews 4, 345–376.
Bundy, M.H., Gross, T.F., Vanderploeg, H.A., Strickler, J.R., 1998. Perception of inert
particles by calanoid copepods: behavioral observations and a numerical model.
Journal of Plankton Research 20, 2129–2152.
Fiksen, Ø., MacKenzie, B.R., 2002. Process-based models of feeding and prey
selection in larval fish. Marine Ecology Progress Series 243, 151–164.
Galbraith, P.S., Browman, H.I., Racca, R.G., Skiftesvik, A.B., Saint-Pierre, J.F., 2004.
Effect of turbulence on the energetics of foraging in Atlantic cod Gadus morhua
larvae. Marine Ecology-Progress Series 281, 241–257.
179
Granata, T.C., Dickey, T.D., 1991. The fluid mechanics of copepod feeding in
turbulent flow: a theoretical approach. Progress in Oceanography 26, 243–261.
Hinrichsen, H.H., Mollmann, C., Voss, R., Koster, F.W., Kornilovs, G., 2002.
Biophysical modeling of larval baltic cod (Gadus morhua) growth and survival.
Canadian Journal of Fisheries and Aquatic Sciences 59, 1858–1873.
Kiørboe, T., 2008. A Mechanistic Approach to Plankton Ecology. Princeton Univ.
Press. 228p.
Kiørboe, T., Saiz, E., 1995. Planktivorous feeding in calm and turbulent
environments, with emphasis on copepods. Marine Ecology Progress Series
122, 135–145.
Lewis, D.M., Bala, S.I., 2006. Plankton predation rates in turbulence: a study of the
limitations imposed on a predator with a non-spherical field of sensory
perception. Journal of Theoretical Biology 242, 44–61.
Lewis, D.M., Pedley, T.J., 2000. Planktonic contact rates in homogeneous isotropic
turbulence: theoretical predictions and kinematic simulations. Journal of
Theoretical Biology 205, 377–408.
Lough, R.G., Buckley, L.J., Werner, F.E., Quinlan, J.A., Edwards, K.P., 2005. A general
biophysical model of larval cod (Gadus morhua) growth applied to populations
on Georges Bank. Fisheries Oceanography 14, 241–262.
MacKenzie, B.R., Kiørboe, T., 1995. Encounter rates and swimming behaviour of
pause-travel and cruise larval fish predators in calm and turbulent laboratory
environments. Limnology and Oceanography 40, 1278–1289.
MacKenzie, B.R., Miller, T.J., Cyrm, S., Leggett, W.C., 1994. Evidence for a domeshaped relationship between turbulence and larval fish ingestion rates.
Limnology and Oceanography 39, 1790–1799.
Mann, J., Ott, S., Pécseli, H.L., Trulsen, J., 2005. Turbulent particle flux to a perfectly
absorbing surface. Journal of Fluid Mechanics 534, 1–21.
Mann, J., Ott, S., Pécseli, H.L., Trulsen, J., 2006. Laboratory studies of predator–prey
encounters in turbulent environments: effects of changes in orientation and
field of view. Journal of Plankton Research 28, 509–522.
Mariani, P., MacKenzie, B.R., Visser, A.W., Botte, V., 2007. Individual-based
simulations of larval fish feeding in turbulent environments. Marine Ecology
Progress Series 347, 155–169.
Morse, P.M., Feshbach, H., 1953. Methods of theoretical physics. In: International
Series in Pure and Applied Physics. Springer, New York. 997p.
Muelbert, J.H., Lewis, M.R., Kelley, D.E., 1994. The importance of small-scale
turbulence in the feeding of herring larvae. Journal of Plankton Research 16,
927–944.
Osborn, T., 1996. The role of turbulent diffusion for copepods with feeding currents.
Journal of Plankton Research 18, 185–195.
Pécseli, H.L., Trulsen, J., 1991. Analytical expressions for conditional averages: a
numerical test. Physica Scripta 43, 503–507.
Pécseli, H.L., Trulsen, J., 2007. Turbulent particle fluxes to perfectly absorbing
surfaces: a numerical study. Journal of Turbulence 8 (42), 1–25. doi:10.1080/
14685240701615986.
Pécseli, H.L., Trulsen, J., 2008. Predator–prey encounter rates in turbulent
environments: consequences of inertia effects and finite sizes. AIP Conference
Proceedings 1177, 85–95.
Rothschild, B.J., Osborn, T.R., 1988. Small-scale turbulence and Plankton contact
rates. Journal of Plankton Research 10, 465–474.
Tennekes, H., Lumley, J.L., 1972. A First Course in Turbulence. The MIT press,
Cambridge, Massachusetts. 390p.
Visser, A., 2007. Motility of zooplankton: fitness, foraging and predation. Journal of
Plankton Research 29, 447–461.