Document 11345602
advertisement

On The Challenges Related To Using
Thermostatically Controlled Loads
For Demand Response
Mario Bergés
Assistant Professor
2/5/2014 – CMU Electricity Conference – Pittsburgh, PA
Collaborators
• Emre Can Kara (CEE, student)
• Bruce Krogh (ECE)
• Zico Kolter (CS)
• Soummya Kar (ECE)
• Gabriela Hug (ECE)
2
Renewable Energy
generation
time
Supply
=
Demand
Transmission Grid
Distribution Grid
3 Flexibility and Reliability: Additional Sources
• Demand response systems
• Price responsive demand
• Variation in price to encourage customers
to reduce/shift consumption
• Load management and control
• Loads are automated and controlled
directly based on a control signal
• Tighter control bounds
• Faster response time
• provide fast-timescale (seconds to
minutes) services
4
Thermostatically Controlled Loads (TCLs)
Refrigeration example:
• More than 40% of the
electricity consumed in
buildings
Thigh
Temp.
Tlow
• Availability in households
• 24/7 available for signals
• Disrupted without any effect on Power
end-user’s comfort
Time
5
Load Aggregation Benefits
• An aggregation of smaller loads provide
more reliable curtailment than the response
of a single or multiple large loads with an
equivalent capacity. (Eto et al. 2012)
• Aggregations of small load resources
provide continuous control with simpler
control actuation. (Callaway et al. 2011)
• Individual monitoring systems for small
loads are expected to be less costly than
large load programs.
6
Reliability & Continuity Existing Work
Centralized Control
City Power
Plant
Solar Farm
Wind Farm
7
D
• Distri
Existing Work
D&#6
Centralized Control
C'$#1+
the device
City Power
ness
Plant
Wind Farm
Plug Level NILM:
to determine the appliance
type
?
meline
ment of a
d controller
oads, Small
e TCLs
ial,
al
Solar Farm
• Centr
Information
Information on Appliance State Models:
Year 3
Supply & Demand
to do appliance state
Development of a
prediction
distributed controller
Controller
Example: TCLs
All Loads
Data
Mixed
Control
Implementation: 102
Simulation: 105
Action
tation: 102
n: 104
Information
Retrieval
ammable HVAC control
Power
Model
-Event detection
-Classification
-TCL Parametric
Model
Sensor
Fusion
*$$&'
C'81%&-
Machine
Learning
Techniques
Com
"#$%&' () *+ ,&-.#/'-
State
Indicator
Nominal
Temperature
! Test bed for sensor
fusion opportunities and
8
?%#46#+$ @A1-,4B
"#$%&' 9) :.' #+
D
Learning
Characteristics:
Appliance State Models:
• Distri
Techniques
r2
Year 3
to
do
appliance
state
velopment
of• aNon-Intrusive
Development
of a
Existing
Work
prediction
tralized controller
distributed controller
•
A
bility
to
detect
the
type
of
the
Inform
Example: TCLsdevice
sive Loads, Small All Loads
Information
Centralized
Control
State
Large TCLs
Indicator
connected
Retrieval
• Centr
Plug
Lev
Data Information
Model
the device
mmercial,
Mixed
sidential
-Event detection
to determine t
•
A
ppliance
condition
awareness
-Classification
lementation: 10
Implementation: 10
Plug Level NILM:
Sensor
-TCL Parametric
• Real-time
state information typ
ulation: 10
Simulation: 10
Nominal
•
A
ctuation
to
determine
the
appliance
Model
Power
City Power Solar ness
Wind TemperatureFusion
from
appliances.
Timeline
D&#6
C'$#1+
2
2
4
?%#46#+$ @A1-,4B
5
"#$%&
Plant
oads
Farm
Farm
Research Timeline:
Timeline
Year 1
?
Year 2
?
*$$&'
type
C'81%&-
(Koch et al. 2011; Kara et al. 2012)
Com
• Kalman filter
and
Extended
Appliance
St
Machine
Year 3
to do appli
Kalman filter
for estimation.
Learning
"#$%&' () *+ ,&-.#/'-
meline
Control Algorithm
Development of a
of a State
Development
of a
Information
on Development
Appliance
Models:
grammable
HVAC
control
(Mathieu
et Techniques
al. 2012)
predi
!
T
est
bed
for sensor
local
controller
centralized
controller
distributed
controller
Year 3
Supply
&
Demand
to do appliance state
Example: TCLs
Type
of Load of a
Small TCLs*
Passive Loads, Small All Loads
ment of a
Development
fusion
opportunities
and
ach
plug
load and actuate andthe
Large TCLs
prediction Aggregate Power
State Information
d controller
distributed controller
Data
Mode
Controller
Example:
TCLs
Type
of
Facility
Laboratory,
Commercial,
Mixed
oads, Small All Loads
HVAC
control.
Residential
Residential
State
-Event dete
e TCLs
Indicator
-Classificat
Number
Implementation: 10
Implementation:Model
10
Implementation:
10
Data
ial,
Mixed of Loads
-TCL Param
!
T
est
bed
for
olal for plug-in appliances
Simulation: 10
Simulation: 10
Simulation: 10
-Event detection
Model
Power
Information
-Classification
tation: 10Control
Implementation: 10
communication
s
provide
and help -TCL Parametric
n: 10to Action
Simulation: 10feedback
Nominal
Retrieval
Model
Power
Temperature
framework
between the
of state prediction
appliances and other
members.
! Fine-grained and programmable HVAC control
fu
! AHVAC
bility to
measure each plug
and for
actuate
ammable
control
! load
Test bed
sensorthe
9
appliances remotely
fusion opportunities and
1
3
2
4
2
5
2
4
2
5
*TCL: Thermostatically Controlled Loads
"#$%&' 9) :.' #+
10
CHALLENGE #1:
STATE ESTIMATION
}
}
A. Markov Dec
Population Model
T
Natural dynamics
Thigh
ON
Control actions
tion model adopted from
OFF
ON
.
[9] .
.
.
OFF
each temperature interval k and
we can define
the
state
variable
as:
T
low
Time
(4)
tt = ON, It = k}
11
An MDP is f
sions/actions
D
N
function T N-1
whe
immediate rew
and the state
next state as a
2
useful models
1
a complete mo
dyna
able,Natural
an optim
programming
Control actiot
commonly use
}
}
A. Markov Dec
Population Model
T
Natural dynamics
Thigh
ON
OFF
Control actions
tion model adopted from
OFF
ON
.
[9] .
.
.
.
.
.
.
OFF
each temperature interval k and
we can define
the
state
variable
as:
T
low
Time
(4)
tt = ON, It = k}
12
An MDP is f
ON
sions/actions
D
N
function T N-1
whe
.
immediate
rew
.
.
and
the state
.
next
state as a
2
useful models
1
a complete mo
dyna
able,Natural
an optim
programming
Control actiot
commonly use
We assume that an appliance is aware of its current status and temperature
OF F
appliances ON/OF F , we use x
temperature
adjustments
= Pset-point
r{Stt =
OF F, Itsimilar
= k}to [14].
1,t
Population Model
Probability
of being
in a d
each temperature interval,• k State
at time,Vector:
t is defined
as a switching
probability,
bin
OFF
⇠
k
OFswitch
F
used to denote the direction ofxthe
follows:
= Pasr{St
t = OF F, It = k}
2,t
ON
8
>
<
OF F 0, if St = ON and St+1 = OF F
N
x⇠k,t
= P r{Stt = OF F, It = k}
=
>
:
N-1
1 1, if2 St =3 OF F and…St+1 = ON2N
.
ON
ON
OF F
OF F
.
X
=
[x
,
.
.
.
x
,
x
.
.
.
x
t
N,t to toggle
1,t
N,t ] O
Hence, for temperature interval It = k,1,ta probability
the appliances
.
.
Forfor
appliances
that are
currently
F in and
the temperature
interval k, aof
simila
.time
tthe
is defined
. elements
These
each as:
state
form
the OF
first
second portion
th
.
respectively.
We . use
vector
at Switching
time t. Probabilities
• state
Control
Action:
as: Xt to denote the
2
d0k,t =P{St+1 = ON |St = OF F, It = k, controller}
3.1.3
Communication and Control
Signal
d1 = P{St+1 = OF F |St = ON, It = k, controller}
1
k,t
Availability of the state information, the control strategy, the control signal ch
16decision
The control
actions that can
be important
achieved with these
variables
are depict
to dispatch the control
to appliances
are
points
when
the commun
We assume that
appliancenature
is aware
temperature
thean
contradicting
of d0k,t of
andits
d1k,tcurrent
, a single status
switchingand
probability
for each
ON/OF F we userealize
temperature
set-point adjustment similar to [1]. Decisio
the required probability mass adjustment at time t. Therefore, one of the
0
1
interval, k at time, t are
defined
as
switching
probabilities,
d
and
d
k,t
k,t as fo
1
and dk,t ) for any interval k will be zero depending on the desired switching dire
vector of size {1
⇥ N=P
} at r{St
time tt+1
can be
as tfollows:
d0k,t
= formed
ON |St
= OF F, It
13
1
= k, contr
F
xOF
= P r{Stt = OF F, It = k}
1,t
State Estimation
F Current State of TCLs
xOF
= P r{Stt = OF F, It = k}
2,t
Aggregate Power F
xOF
= P r{Stt = OF F, It = k}
k,t
1
2
3
…
2N
ON
OF F
F
Xt = [xON
. . . xOF
1,t , . . . xN,t , x1,t
N,t ]
These elements for each state form the first and second portion of th
respectively. We use Xt to denote the state vector at time t.
3.1.3
Communication and Control Signal
Availability of the state information, the control strategy, the control signal ch
to dispatch the control to appliances are important points when the commun
We assume that an appliance is aware of its current status and temperature
ON/OF F we use temperature set-point adjustment similar to [1]. Decisio
interval, k at time, t are defined as switching probabilities, d0k,t and d1k,t as fo
d0k,t =P r{Stt+1 = ON |Stt = OF F, It = k, contro
d1k,t
14
=P r{Stt+1 = OF F |Stt = ON, It = k, contr
OF
OF FDt is the decision/control action
gx
theF Nonlinear
,by
8ix2ON
[1,and
NDynamics
] xand
rmed
, 8i 2 [1, N ] and Dt is the decision/control
action
i,t
Nonlinear
Dynamics
i,t
i,t
xOF F = P r{St
= OF F, I
t
1,t
espectively.
Assume
we have
an observation
Ŷant and
a t ) in Ŷ15,
onsnovel
(6) state
and
(10),
respectively.
Assume
we have
observation
and a
estimator
the state
transition
function
Estimation
elaState
state estimator
using using
the state
transition
function
T(XT(X
, D t), D
in 15, t
t
t
= k}
t
OF F Current State of TCLs
F
ran
formed
by
xON
and
xOF
, 8i
2 Ŷ[1,
N
]
and
D
is
the
decision/control
x
= action
P r{Stt = OF F, It =
t
estimate
of
the
current
state,
to
an
output
Ŷ
:
ON
OF an
FPower
Aggregate
current
state,
to
output
:
i,t
i,t
2,t action
t
ed by x
and x
, 8i 2 [1, N ] tand Dt is the decision/control
i,t
i,t
ations (6) and (10), respectively. Assume we have an observation Ŷt and a
(6) and (10), respectively. Assume we have an observation Ŷt and a
OF F
x
= P r{St(19)
X̂t , an estimate of the
current
state,
to
an
output
Ŷ
:
t = OF F, It
t
k,t
Ŷ
=
C
X̂
t
estimate
state,t to an output Ŷt :
= C X̂t of the current
(19)
1
2
3
…
k}
= k}
2N
F
F
Xt = [xON
, .(19)
. . xON
, xOF
. . . xOF
]
T Ŷt = C X̂t
1,t
N,t
1,t
N,t
we can use the
optimization
routine to obtain an estimate
of the
Ŷt =following
C X̂t
(19)
OF F
ation can
be formed toroutine
obtain x
for all
owing
optimization
toi,t+1
obtain
ani.estimate of the
• Using system
dynamics
based
on
Kara
et
al. form the first and second portion of th
These
elements
for
each
state
unction
T(D
,
X
)
is
constructed
by
using
(14):
ervations
ontt ,YD
power consumption and the Dt , the decision
t ,ttthe
Using
T(X
) aggregate
daggregate
T we2012
can
use
the
following
optimization
routine
obtain
an estimate
of the
power
consumption
Dto
respectively. We use Xand
denote
thedecision
state
vector
at time t.
t , the
t tothe
can useXthe
routine to
obtain an estimate of the
= T(Dt ,optimization
Xt )
(15)
t+1following
bservations on
consumption
observation
Yt Yand
a aggregate
matrix
C power
that relates
the and the Dt , the decision
t , the
t
X
tions
on Yt , the
power consumption
and the Dt , the decision
• tracking
Assume
C aggregate
existsthe
such
nce
scenario,
simplest
instantaneous
2
t
3.1.3
Communication
and
Control Signal
minimize
(Y
Ŷ
)
(20)
X that:
j
j
ormed
byŶusing
the
tracking
error.
Assuming
the
2
t
CX
. tX
(Yjt = ŶX̂
(20)
T +1
jj)t
2 Prated,i =
all
appliances
is
constant,
t
rated,i for
minimize
Ŷj ) information, the control strategy,
(20)
of (Y
the
the
X
j state
T +1 Availability
2
X̂
ei,period
T
we
can
use
the
following
j
weminimize
introduce the following
(20)
t(YTj +1 Ŷj )reward function:
control signal ch
to
the control to appliances are important points when the commun
X̂j dispatch
to estimate
thet XTt+1
:
9
2
= 1/log((P
P
⇤
X
)
+an
2)appliance
⇤ K (16) is aware of its current status and temperature
We
assume
that
ref,t
rated
t
>
to , D
>
X̂jsubject
=
T(
X̂
)
j 1 9
9ON/OF
t j 1
>
X
>
F
we
use
temperature
set-point adjustment similar to [1]. Decisio
d
function
is
positive
and
increasing
as
the
>
2>
>
>
>
9
X̂
=
T(
X̂
,
D
)
>
minimize
(Y
j
j 1i
jCX
1 i )>
>
0
1
=
j 1x̂)ON
>
>
interval,
k
at
time,
t
are
defined
as
switching
probabilities,
d
and
d
0
>
Xterm
>
>
(P
P
⇤
X
)
decreases.
K
is
a
t
T
+1:t
ref,t
rated
t
j,i
>
k,t
k,t as fo
>X̂ , D ) > >
X̂ = T(
j
ONtj T1+1 j 1 >
= j 2 [t T + 1, t], i 2 [1, N ]
(21)
>
>
x̂>
0 formulation
>
ant. This
has
continuous
state
j,i MDP
=
>
>
OF
F
>
>
to x̂j,i
j 2 [t T + 1, t], 0i 2 [1, N ]
(21)
ON
0 and decision
= >
>
x̂
0
>
ty
distribution)
spaces.
The
most
OF
F
j,i
j
2
[t
T
+
1,
t],
i
2
[1,
N
]
(21)
r{Stt+1 =(21)
ON |Stt = OF F, It = k, contro
>
o Xt T
x̂j,i= T(X0t T +1 , dtj 2
T>
+1
>
k,t
>
[t ) T + 1, t], i 2 d[1,
N =P
]
>
>
>
>
d way
MDPs
; is to discretize
>
>
>
F ~
>
1to~0=deal
1 with such
>
15
.. X̂
1
x̂OF
j>
>
;
>
j,i
d
=P
r{Stt+1 = OF F |Stt = ON, It = k, contr
o obtain
set1 of states>
S
and
decisions
D.
>
. X̂>
k,t
>j a1 =
>
>
>
OF
OF FDt is the decision/control action
gx
theF Nonlinear
,by
8ix2ON
[1,and
NDynamics
] xand
rmed
, 8i
2 [1, Ncan
] and
decision/control
action
i,t
Nonlinear
Dynamics
t is the
i,t
i,t C
The
matrix
be D
used
as defined
22.
xOF Fin=equation
P r{St
= OF F, I
1,t in equationt 22.
The C matrix can be used as defined
espectively.
Assume
we have
an observation
Ŷant and
a t ) in Ŷ15,
onsnovel
(6) state
and
(10),
respectively.
Assume
we have
observation
and a
estimator
the state
transition
function
Estimation
elaState
state estimator
using using
the state
transition
function
T(XT(X
, D t), D
in 15, t
t
= k}
t Filtering
t
3.2.3 Estimation Using Kalman
OF
F Current State of TCLs
F
ran
formed
by
xON
and
xOF
, 8i
2 Ŷ[1,
N
]
and
D
is
the
decision/control
x
= action
P r{Stt = OF F, It = k}
t
estimate
of
the
current
state,
to
an
output
Ŷ
:
ON
OF an
FPower
Aggregate
current
state,
to
output
:
i,t
i,t
2,t
t
ed by xi,t and xi,t , 8i 2 [1, N ] tand Dt is the decision/control action
The second Assume
methodwe
that
hasanbeen
used forŶstate
is Kalman filtering,
ations (6) and (10), respectively.
have
observation
a
t and estimation
3.2.3
Estimation
Using
Kalman
Filtering
(6) and (10), respectively.
Assume
we
have
an
observation
Ŷ
and
a
t Filtering
3.2.3 Estimation Using Kalman
OF F
xk,t we=used
P r{St
F, It =onk}the iden
described
in to
[34].
theŶKalman
filter,
a MATLAB
X̂t , an estimate of the
an For
output
t = OF routine
t:
Ŷt current
=
C X̂tstate,
(19)
estimate
state,
to an output Ŷt :
= C X̂t of the current
(19)
The
is
Kalman
…
2 for
The second
second method
method that
that has
has been
been1used
used
for3 state
state estimation
estimation
is2N
Kalman fil
fil
ON
ON
OF F
OF F
Xt+1
=A
X
Ŷtdescribed
= C X̂t
(19)
lin
t +aBu
t + B! !
t. .routine
X
=
[x
,
.
.
.
x
,
x
.
x
in
[34].
For
the
Kalman
filter,
we
used
MATLAB
t
1,t
N,t
1,t
N,t ]on
described
in
For
the Kalman
we used
MATLAB routine
on tt
we can use the
optimization
routine
to obtainfilter,
an estimate
of athe
Ŷt =following
C X̂
(19)
t
OF[34].
F
ation can
be formed toroutine
obtain x
for all
owing
optimization
toi,t+1
obtain
ani.estimate of the
• Using system
dynamics
based
on
Kara
et
al. form
• Using
liner
based on portion
Callaway et
al.th
Yat first
=CXmodel
+ vt second
tand
These
elements
for
each
state
the
of
unction
T(D
,
X
)
is
constructed
by
using
(14):
ervations
ontt ,YD
power consumption and2012
the Dt , the decision
t ,ttthe
Using
T(X
) aggregate
daggregate
T we2012
can
use
the
following
optimization
routine
to
obtain
an
estimate
of=A
the
power
consumption
and
the
D
,
the
decision
respectively.
We use X
the
state
vector
atlintime
t
X
Xt + t.
But + B! !t
t to denote
t+1
can useXthe
following
optimization
routine
to
obtain
an
estimate
of
the
X
=A
(15)
t+1
lin Xt + But + B! !t
t+1 = T(Dt , Xt )
where
vCt power
is
therelates
measurement
noise
and
!t decision
is the process noise vector. Both o
bservations on
consumption
the D
observation
Yt Yand
a aggregate
matrix
that
the and
t , the
t , the
t
X
tions
on Yt , the
power consumption
and the Dt , the decision
• tracking
Assume
C aggregate
existsthe
such
nce
scenario,
simplest
instantaneous
Y
vvt
t =CX
t+
2
t
Y
=CX
+
3.1.3
Communication
and
Control
Signal
minimize
(Y
Ŷ
)
(20)
t
t
t
X
independent
of
each
other,
white
and
with
normal
probability
distributions [35]:
j
j
ormedthat:
byŶusing
the
tracking
error.
Assuming
the
2
t
•
With
perfect
measurement
noise and the
X̂
=
CX
.
j
(Yjt Ŷj )t t X
(20)
T +1
2
all
appliances
constant,
t
rated,i for
rated,i =
given as
follows:
minimize
Ŷj ) Pinformation,
(20)
Availability
ofis(Y
the
the process
controlnoise
strategy,
the
control signal ch
X
j state
T
+1
2
where
v
is
the
measurement
noise
and
!
is
the
process
X̂
ei,period
T
we
can
use
the
following
j
t
t
weminimize
introduce the following
t(YTj +1 Ŷjv)treward
where
is thefunction:
measurement noise and (20)
!t is the process noise
noise vector.
vector. B
B
to dispatch the control to appliances are important points when the commun
p(!t ) ⇠ N (0, Q)
X̂j the X :
to estimate
t Tt+1
9
2
= 1/log((P
Prated
⇤>
X
⇤each
K (16)
independent
other,
with
normal
probability
distribution
We
that
an2)of
is white
awareand
of its
current
status
and temperature
ref,t
t) +
independent
ofappliance
each
other,
white
and
with
normal
probability
distribution
to assume
>
X̂jsubject
=
T(
X̂
,
D
)
j 1 9
9ON/OF
t j 1
>
X
>
F we
use
temperature
set-point adjustment similar to [1]. Decisio
d
function
is
positive
and
increasing
as
the
>
2>
>
>
>
9
X̂
=
T(
X̂
,
D
)
>
minimize
(Y
p(vt ) ⇠ N (0, Rmes )0
j
j 1i
jCX
1 i )>
>
1
=
j 1x̂)ON
>
>
interval,
k
at
time,
t
are
defined
as
switching
probabilities,
d
and
d
0
>
Xterm
>
>
(P
P
⇤
X
)
decreases.
K
is
a
t
T
+1:t
ref,t
rated
t
j,i
>
k,t
k,t as fo
>
X̂j = T(
X̂tj T1+1
, Dj 1 ) >
>
>
>
ON
= j 2 [t T + 1, t], i 2 [1, N ]
(21)
>
p(!
⇠
N
(0,
Q)
x̂>
0 formulation
t)
>
ant. This
has
continuous
state
j,i MDP
=
p(!
)
⇠
N
(0,
Q)
>
>
t
OF
F
>
>
to x̂j,i
j
2
[t
T
+
1,
t],
i
2
[1,
N
]
(21)
ON
0
=
>
0 matrix Q is
The
process
covariance
computed
with the
residuals
between
the s
0=jFT(X
>
>
2 [t
T decision
ispaces.
2T [1,
NThe
] i 2most
(21)
>
d
=P
r{St
=
ON
|St
=
OF
F,
I
=
k,
contro
>
ox̂tyj,i
Xdistribution)
,+dtj1,2Tt],
)
x̂OF
0t and
t+1
t
t
t T
T +1
+1
>
k,t
>
[t
+
1,
t],
[1,
N
]
(21)
j,i
>
>
>
>
dOF
way
to=deal
with such
MDPs
; is to discretize
>
>
>
~
F
>
>
X̂
1
1
>
.. j >~0
the
model
and the real 1state 16
values. Since a perfect Q matrix is hard to obtain,
x̂j,i
>
;
d
=P
r{Stt+1 = OF
F |SttN=(0,ON,
I = k, contr
o obtain
set1 of states>
S
and
decisions
D.
>
p(v
. X̂>
k,t
>j a1 =
>
p(vt )) ⇠
⇠ N (0, R
Rmes ))t
>
>
t
mes
Case Studies
Random Action
MHSE
Estimate
KF Estimate
Simulated Population
of Appliances
Moving Horizon State
Estimator (MHSE)
Kalman Filter
Case Study I: Understand the effect of changing the time horizon T on estimation
performance for MHSE Case Specific Input
Time Horizon, T
Distribution
Values
Constant
10, 20, 30, 40, 50, 60 minutes
Case Study II: Compare the performances of the Kalman Filter and the MHSE under
different switching conditions.
Case Specific Input
Distribution
Values
Time Horizon, T
Constant
40 minutes
Forcing Parameter, f
Constant
12.5, 25, 50, 75, 100%
17
Case Studies (Cont’d)
• Simulated 500 TCLs with varying thermal characteristics and white
noise on the individual appliance temperature dynamics.
Simulation Input
Distribution
Values
Capacitance
Uniform
[8-12 kWh/oC]
Resistance
Uniform
[1.5-2.5 oC/kW]
Rated Power
Uniform
[10-18 kW]
Temperature Set-point
Constant
20oC
Temperature
Deadband Width
Constant
0.5oC
Ambient Temperature
Constant
32oC
Temperature Dynamics Noise
Normal
N(0,0.01)
Simulation Time Step
Constant
1 minutes
Total Estimation Duration
Constant
10 hours
• Estimator specific characteristics:
Kalman Filter
Distribution
Values
Process Noise
Normal
N(0,Q)
Constant
0
Measurement Noise
18
Case Studies (Cont’d)
• To quantify the information lost when
is used to represent • Mean Kullback-Liebler (KL) divergence during the estimation period for each
run.
19
Results
• Case study II: 10 simulations
per forcing parameter, f
• Showing 95% confidence
intervals
• Case study I: 10 simulations per
estimation
horizon
• Showing 95% confidence
intervals
20
21
CHALLENGE #2:
DEVIATIONS FROM LINEAR
ASSUMPTIONS
Back to the assumptions
• Simulated 500 TCLs with varying thermal characteristics and white
noise on the individual appliance temperature dynamics.
Simulation Input
Distribution
Values
Capacitance
Uniform
[8-12 kWh/oC]
Resistance
Uniform
[1.5-2.5 oC/kW]
Rated Power
Uniform
[10-18 kW]
Temperature Set-point
Constant
20oC
Temperature
Deadband Width
Constant
0.5oC
Ambient Temperature
Constant
32oC
Temperature Dynamics Noise
Normal
N(0,0.01)
Simulation Time Step
Constant
1 minutes
Total Estimation Duration
Constant
10 hours
• Estimator specific characteristics:
Kalman Filter
Distribution
Values
Process Noise
Normal
N(0,Q)
Constant
0
Measurement Noise
22
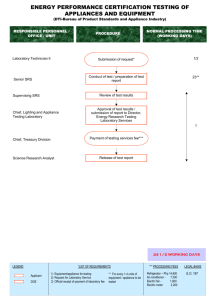
Power consumption
data collected over 200
refrigerators.
TOFF,i
Power
TON,i
Fit Weibull distributions
and obtain parameters
Estimate hyper parameters of
kON, λON, kOFF, λOFF
i=1
.
.
.
i=N
Time
Parameter
Distribution
Range
Thermal Resistance, Ri(oC/kW)
Uniform
80-100
Thermal Capacitance, Ci(kWh/oC)
Uniform
0.4-0.8
Rated Power, Prated,i (kW)
Uniform
0.2-1.0
Ambient Temperature, Θi,a (oC)
Constant
20
Thermostatic dead-band, δi (oC)
Uniform
1-2
Temperature set point, Θi,set (oC)
Uniform
1.7-3.3
References
•
Eto, J. H., Nelson-Hoffman, J., Parker, E., Bernier, C., Young, P., Sheehan, D., ... & Kirby, B. (2012,
January). The Demand Response Spinning Reserve Demonstration--Measuring the Speed and
Magnitude of Aggregated Demand Response. In System Science (HICSS), 2012 45th Hawaii
International Conference on. IEEE.
•
Callaway, D. S. (2011, July). Can smaller loads be profitably engaged in power system services?.
In Power and Energy Society General Meeting, 2011 IEEE(pp. 1-3).
•
Koch, S., Mathieu, J. L., & Callaway, D. S. (2011, August). Modeling and control of aggregated
heterogeneous thermostatically controlled loads for ancillary services. In Proc. PSCC (pp. 1-7).
•
Mathieu, J. L., Koch, S., & Callaway, D. S. (2012). State estimation and control of electric loads to
manage real-time energy imbalance.
•
Kara, E. C., Kolter, Z., Berges, M., Krogh, B., Hug, G., & Yuksel, T. (2013, October). A moving
horizon state estimator in the control of thermostatically controlled loads for demand response.
In Smart Grid Communications (SmartGridComm), 2013 IEEE International Conference on (pp.
253-258). IEEE.
Acknowledgments
NSF Grant #09-30868
26
27
The End
QUESTIONS?
@bergesmario
marioberges.com