1 Overview
advertisement

Notes on QSS Reduction
1
Overview
The purpose of these notes is to describe the qss reduction in a systematic way, and then
show several examples of how this works. We suppose that we have a differential equation
of the form
du
1
= Au + B(u),
(1)
dt
ǫ
where ǫ << 1. We assume that the eigenvalues of A are non-positive. In order for there to be
a separation of time scales, it must be that A has a null-space. So we assume that the nullspace of A is spanned by {φi }, i = 1, · · · , k, and that there are corresponding vectors {ψi },
i = 1, · · · , k, that span the nullspace of AT , and form a biorthogonal set, < ψi , φj >= δij .
To see the separation of time scales directly, we introduce a change of variables,
X
u = P u + Qu =
ai φi + χ
(2)
i
P
where P u = i αi φi , αi = hψi , ui, Qu = u − P u. Notice that P is a projection, with P u in
the nullspace of A, and Qu is orthogonal to the nullspace of AT
We project the equation (1) to find (multiply by ψi )
dai
= ψiT B(u).
dt
This is the slow-manifold equation. Next we note that
(3)
Qu
dt
=
du
dt
−
Pu
,
dt
so that
X
1
dχ
= Aχ + B(u) −
ψiT B(u)φi .
dt
ǫ
i
(4)
Now we are essentially done. The leading order qss approximation is χ = 0 with slow
dynamics given by
X
dai
= ψiT B(
ai φi ).
(5)
dt
i
However, it is easy to get a better approximation by taking
X
X
X
1
Aχ + B(
ai φi ) −
ψiT B(
aj φj )φi
ǫ
i
i
j
(6)
in which case the slow equation becomes
dai
= ψiT B
dt
X
i
ai φi − ǫA†
B(
X
i
ai φi ) −
X
i
ψiT B(
X
j
aj φj )φi
!!
.
(7)
Notice that this analysis assumes that φi are independent of time. If they are not independent of time, a similar argument still applies, but with some extra terms.
1
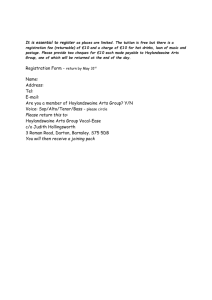
Figure 1: Model of the RyR. R and RI are closed states, O is the open state, and I is the
inactivated state.
2
2.1
Examples
RyR Kinetics
Consider the 4-state chemical reaction network shown in Fig.1
We assume that k1 >> k2 and k−1 >> k−2 . To simplify the notation, we set c = 1.
The master equation for this network can be written in the form of (1) by first rescaling
k±1 → ǫk±1 for some fixed small number ǫ. We don’t specify it completely, because we want
to allow k1 , k2 , k−1 and k−2 to be time varying.
−k2 0
k−2
0
−k1 k−1
0
0
P00
k1 −k−1 0
P10
0 −k2
0
k−2
0
,
B=
A=
u=
k2
0
P01 ,
0 −k−2
0
0
−k1 k−1
0
k2
0
−k−2
0
0
k1 −k−1
P11
(8)
where the identification of states is R = {00}, RI = {01}, O = {10}, I = {11}.
The decomposition of the equations uses the vectors
0
1
0
κ−1
0
−1
0
κ1
,
,
(9)
φ
=
φ
=
φ
=
φ1 =
4
3
2
1
0
κ−1
0
−1
0
κ1
0
where κ±1 =
k±1
,
k1 +k−1
1
1
ψ1 =
0 ,
0
and
0
0
ψ2 =
1 ,
1
κ1
−κ−1
ψ3 =
0 ,
0
0
0
ψ4 =
κ1
−κ−1
(10)
Notice that φ1 , φ2 span the nullspace of A, φ3 , φ4 span the non-zero eigenspace of A, ψ1 , ψ2
span the nullspace of AT , and ψ3 , ψ4 span the nonzero eigenspace of AT .
We define y1 = P00 + P10 , y2 = P01 + P11 , and and learn that (multiply by ψ1 and ψ2 )
dy1
= −k2 y1 + k−2 y2 ,
dt
dy2
= k2 y1 − k−2 y2 ,
dt
2
(11)
which describes the slow kinetics. The fast kinetics follow (from multiplication by ψ3 , and
ψ4 )
dP00
1
z1
−k2 k−2
z1
κ1 dt − κ−1 dPdt10
= − (k1 + k−1 )
+
(12)
z2
k2 −k−2
z2
κ1 dPdt01 − κ−1 dPdt11
ǫ
where z1 = κ1 P00 − κ−1 P10 , and z2 = κ1 P00 − κ−1 P10 .
Thus, the leading order qss approximation has z1 = z2 = 0, or κ1 P00 − κ−1 P10 = 0, and
κ1 P00 − κ−1 P10 = 0, That is,
P00 = y1
2.2
κ−1
,
κ1 + κ−1
P10 = y1
κ1
,
κ1 + κ−1
P01 = y2
κ−1
,
κ1 + κ−1
P11 = y2
κ−1
.
κ1 + κ−1
(13)
Adiabatic Reduction for Master Equations
This same technology can be used to find the slow evolution of drift-jump stochastic processes. We suppose that the transitions between xk states are fast. If this is the case, then
we can write the master equation system as
∂p
∂
1
= − (Fp) + Ap.
∂t
∂y
ǫ
(14)
Now, it must be that the matrix A has a zero eigenvalue with eigenvector φ. The corresponding left eigenvector is ψ with entries (ψj ) = 1. We assume that hφ, ψi = 1. Using
these, we split p into two parts
p = vφ + w
(15)
where hp, ψi = v, and hw, ψi = 0. It follows that
and
∂v
∂
= −ψ T (F(vφ + w)),
∂t
∂y
(16)
1
∂
∂
∂w
= Aw −
(Fp) + ψ T (Fp)φ.
∂t
ǫ
∂y
∂y
(17)
Here, the fast behavior of w is evident, so we take w to be in quasi-steady state. Thus, we
take
∂
∂
(18)
Aw = ǫ (vFφ) − ǫψ T (vFφ)φ + O(ǫ2 ).
∂y
∂y
This equation can be solved uniquely for w subject to the constraint ψ T w = 0; we denote
this as
∂
∂
w = ǫA⊥ (vFφ) − ǫA⊥ ψ T (vFφ)φ + O(ǫ2 ),
(19)
∂y
∂y
where A⊥ is the inverse of the properly constrained A. Consequently,
∂
∂ T
∂
∂v
T
⊥
T ∂
ǫψ FA
= − (ψ Fvφ) −
(vFφ) − ψ
(vFφ)φ
,
∂t
∂y
∂y
∂y
∂y
3
(20)
2.3
Jump Velocity Processes
Consider the simple example of a stochastic differential equation
dy
= kx,
dt
(21)
where x is either 0 or 1, with transition rates α and β. The F-P equation is
∂kp
∂p
= αq − βp −
∂t
∂y
∂q
= βp − αq
∂t
We can reduce this to a single pde by observing that
∂q
∂t
= − ∂p
−
∂t
ptt = −(α + β)pt − αkpy − kpty .
(22)
(23)
∂ap
∂y
so that
(24)
Suppose that α and β are large compared to k. Then the exchange between states is fast
relative to the rate of change of y, and we should be able to do a qss reduction. To do so,
1
α
we introduce dimensionless time (set k = 1) and let ǫ = α+β
, and introduce a = α+β
and
β
b = α+β , so that a + b = 1. In terms of these variables, the F-P equations are
1
∂p
∂p
=
(aq − bp) −
,
∂t
ǫ
∂y
1
∂q
=
(bp − aq).
∂t
ǫ
(25)
(26)
We introduce the change of variables
v = p + q,
w = bp − aq,
(27)
q = bv − w.
(28)
so that
p = av + w,
In terms of these variables the F-P equations are
∂v
∂av ∂w
= −
−
∂t
∂y
∂y
1
∂av
∂w
∂w
= − w−b
−b
∂t
ǫ
∂y
∂y
(29)
(30)
Now we see the obvious fast-slow separation and take w to be in quasi-steady state, so that
w = −ǫb
∂av
+ O(ǫ2 ),
∂y
(31)
from which it follows that
∂v
∂av
∂
∂av
=−
+
(ǫb
) + O(ǫ2 ),
∂t
∂y
∂y
∂y
which is the standard F-P equation we seek.
4
(32)
2.3.1
More generally
For the more general problem
dy
= xf (y) − g(y),
dt
(33)
the F-P equations are
1
∂p
=
(aq − bp) −
∂t
ǫ
∂q
1
=
(bp − aq) +
∂t
ǫ
∂
((f − g)p),
∂y
∂
(gq).
∂y
(34)
(35)
We now introduce the change of variables (27) and find
∂v
∂
= − ((af − g)v + f w),
∂t
∂y
∂w
1
∂
∂
= − w − a (gq) − b ((f − g)p).
∂t
ǫ
∂y
∂y
(36)
(37)
Again, the fast-slow separation is apparent and we take w to be in quasi-steady state, so
that
∂
∂
(38)
w = ǫ(−a (gbv) − b ((f − g)av)) + O(ǫ2 ),
∂y
∂y
from which it follows that
∂v
∂
∂
= − ((af − g)v) +
∂t
∂y
∂y
∂
∂b
ǫf b (f av) + ǫf gv
+ O(ǫ2 ),
∂y
∂y
which is the F-P equation we seek.
5
(39)