A POLYNOMIAL-TIME PARAMETRIC SIMPLEX ALGORITHM ... THE MINIMUM COST NETWORK FLOW ... James B. Orlin
advertisement

A POLYNOMIAL-TIME PARAMETRIC SIMPLEX ALGORITHM FOR
THE MINIMUM COST NETWORK FLOW PROBLEM
James B. Orlin
Sloan W.P, No. 1484-83
-(a·RISlfU-XXIL71
--
_-
______
September 1983
A Polynomial-Time Parametric Simplex Algorithm for
the Minimum Cost Network Flow Problem
by James B. Orlin
Sloan School of Management
MIT
Abstract
In this paper we consider the minimum cost network flow problem:
min(cx : Ax = b, x
matrix.
0), where
A is an m x n vertex-edge incidence
We show how to solve this problem as a parametric linear
program with
0(m b*) pivots, where
binary representation of
b.
b*
is the number of l's in the
The parametric formulation is non-linear and
is based on Edmonds-Karp scaling technique.
sai·igrs31--l
a
____
In this paper we consider the minimum cost network flow problem (1).
where
Minimize
cx
Subject to
Ax
= b
x
0,
A
(1)
matrix in which there is at most one
m x n
is a full row'rank
1 and at most one -1 in each column and the remaining entries are all 0.
Moreover,
is an integral m-vector, and
b
c
is a real n-vector.
Zadeh (1978) showed that the simplex procedure as applied to (1) may
take an exponentially large number of pivots.
Edmonds and Karp (1972)
developed a scaling procedure in conjunction with the out-of-kilter method
that solves the minimum-cost network flow problem in a polynomial number
The purpose of this note is to provide a parametric simplex
of steps.
procedure that solves the minimum-cost network flow problem in polynomial
time.
Recently, Ikura and Nemhauser (1983) have independently developed a
similar parametric procedure for the transshipment problem.
Strongly Feasible Bases
Preliminaries:
2.
As before, we assime that
A
is the full row rank constraint matrix of
We assume without loss of
the minimum cost network flow problem (1).
generality that no two columns of
matrix
where
(2.1)
A
the directed graph
V = {0, ..., m
If a column of
component
(2.2)
0
are the same.
G = (V, E)
, and the edge set
A
We associate with
has a
1
E
is constructed as follows.
in component
i
and a
, then we associate an edge (i, j) of
If a column of
a
A
A
has a
1
-1
in
E.
[resp, -1] in component
i
and
in the remaining components then we associate an edge
(i, 0) [resp., (0, i)] of
E.
III
2.
As is well known, each basis
is a tree.
downward edge of
A
induces a subgraph
G, we say that the edge
T of
T
GB
of
G
e
are two vertices of
PT(i, i')
e = (i, j) of
is an upward edge of
and that
T
e
be the simple path in
whose terminal vertex is
i'.
T
e
whose initial edge is
and
T
T.
e'
T
Suppose that
i
are two edges of
PT(e, e')
is a
to j.
whose initial vertex is
Similarly
that
0.
if (i, j) is on the unique simple path from
Otherwise, we say that
let
of
We assume henceforth that the tree is rooted at vertex
For each tree
i'
B
and
We
T.
i
and
is the simple path in
and whose terminal edge is
e'.
We define
PT(i, e) and PT(e, i) analogously.
e
We say that
e'
on
PT(O,
e'
in
T
e
if
is a descendent of
e.
We say that
(and that e' is the son of e)
if
e
also say that
of
is an ancestor of
e').
spanning tree
e'
For each vertex
v
V
e
e').
We
is the father
is the second to last edge
and for each edge
ei
of the basic
T, we associate the colors red, green and yellow as follows.
(3.1)
If
x.i > 0, then we color edge
(3.2)
If
xi = 0
ei
is colored "red".
If
xi = 0
(3.3)
PT(,
E
and if
ei
and if
ei
ei "green".
is an upward edge of
T
is a downward edge of
then
T
then
ei
is colored "yellow".
(3.4)
For each vertex
red edge then
(3.5)
v
v
For each vertex
yellow edges then
We say that a red edge
red and
j
is green.
V, if
PT(O,
v)
has at least one
is colored "red".
v
solely of green and
V, PT(O, v)
v
is colored "green".
e = (i, j) in
Thus the ancestors of
T
is maximum in
e
in
T
T
if
i
is
are green.
As per Cunningham (1976), we say that a basic feasible flow is strongly
3.
feasible if no edge of the corresponding tree is red.
(Orlin (1983)
showed that a basic feasible flow is strongly feasible if and only if it
is lexico-positive.)
In general, the dual simplex pivot rule that we adopt will pivot out
For each red (and hence upward) edge
red edges.
the vertices of
vertex 0.
Let
e = (i, j), let
that are in the same connected component of
V
be the fundamental cutset of
F(T, e)
Te
T - e
induced by
T
be
as
e
and defined as follows.
F(T, e) = {e' = (i', j')
G - T
i'
Te and j'
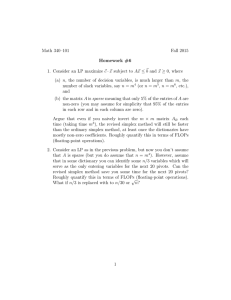
We illustrate these terms in Figure 1 and in Tables 1 and 2.
the only maximal red edge is
by
e
is
e = (4, 2).
In Figure 1,
The fundamental cutset induced
6)}
F(T, e) = {(1,
Tree Edge
Edge
T - T }
Reduced Cost
Flow
Color
(0, 1)
Yes
3
green
(0, 2)
Yes
0
yellow
(1, 6)
No
5
0
(2, 1)
No
2
0
(2, 3)
Yes
4
green
(4, 2)
Yes
0
red
(4, 5)
Yes
2
green
(4, 6)
Yes
6
green
(5, 3)
No
Table 1.
1
2
3
4
5
6
_
0
The data for the edges of the graph of Figure 1.
Vertex
Table 2.
6
Supply/Demand
Color
-3
4
-4
8
-2
-6
green
green
green
red
red
red
The data for the vertices of the graph in Figure 1.
slll
11
0
3
0
/0
Figure 1.
A basic feasible solution that is not
strongly feasible. Edge (4,2) is red.
The edge numbers refer to the edge flows.
4.
3.
Dual Pivoting to Reach Strong Feasibility
In Section 4 we will develop a parametric procedure in which the
parameter decreases whenever strong feasibility is obtained.
Our parametric
algorithm relies on the efficient procedure developed below for moving
from feasibility to strong feasibility using dual pivots.
The dual simplex pivoting procedure is well-known; see for example
Dantzig (1963).
Here we describe it using the terminology developed in the
previous section.
Moreover, we specialize it for our purposes.
Dual Simplex Pivoting
(4.0).
Start with an optimal basic solution x = (xi)
feasible.
(4.1).
Let
ck
denote the reduced cost of variable
Select a maximum red edge
edge
e
that is not strongly
e
in the basis tree
exists, then quit because
T
T.
xk.
If no such
is strongly feasible.
Otherwise, continue.
(4.2).
Select an edge
If
e'
in
F(T, e)
whose reduced cost is minimum.
F(T, e) = 0, then quit as there is no strongly feasible
basis.
Otherwise, let the new basic tree consist of
T + e' - e.
Return to (4.1).
REMARK.
A special case of the dual simplex pivot rule (4) is the rule of
pivoting out the lexicographically most infeasible edge.
See Orlin (1983)
for more details.
We illustrate the dual simplex pivot rule in Figure 2.
pivoted out corresponds to edge (2, 3), the only red edge.
pivoted in corresponds to the edge (1, 6).
--1IIIII
DDil
-
-
-·^
The variable
The spanning tree obtained
subsequent to the pivot is given in Figure 2.
I'0--
The variable
.I_._.....
3
0
2
Figure 2.
A strongly feasible spanning tree solution
obtained from Figure 1 by a dual pivot.
5.
We say that
of
T
j
and if
PT(i, j)
PT(i, j)
has no yellow edges.
induce a partial order
e and e'
is a red-green chain in
ST
as follows.
are red and if
T
We write that
if edges
T.
We illustrate these concepts in Figures 3 and 4.
Suppose that
problem (1) but that
B
B
PT(e, e')
T.
e
e'
in
is a red-green chain in
is not strongly feasible.
Let
T
be the
be the partial order on the red
ST
edges induced by the red-green chains.
S
is an ancestor
is an optimal basis for the network flow
corresponding spanning tree, and let
elements in
i
The red-green chains in
ST
THEOREM 1.
if
Let
t
be the number of minimal
Then the number of dual pivots using procedure (4) to
create a strongly feasible basis (or prove that none exist) is at least
t
and at most
PROOF.
tm.
Let
dual pivots, where
T,
T
TO
,
...
,
Tr
be the sequence of trees obtained by
is the tree corresponding to the original basis.
In
addition, we define the following notation.
vk = set of green vertices in
Tk.
Ek = set of maximum red edges in
Tk.
Sk = partial order on the red edges induced by
k
t
= number of minimal red edges in
k
s = dilworth number of
Tk
k
S
k
Sk, i.e., the minimum number of
k
red-green chains to cover the red edges of
pk(i, j) = PTk(i,
) = the path on
Tk
from
i
T
to
j.
To complete the proof, we will prove the following relations, all of which
are valid for
integers
L
I
j,
k
[O..r-l].
+l,...,k.
Here the notation [j..k] refers to the set of
0
0
0
2
Q
Figure 3.
010
0
A tree with its corresponding feasible flow.
I 1
Figure 4.
I-i-----L-
The partial order induced by the red-green
chains of the tree of Figure 3. Elements
(2,0) and (3,1) are maximum. Elements (2,0),
(7,5) and (8,6) are minimal.
_ iBrl 8. sl_
__
6.
l
Vk+
1
vk
(5)
Vk + l =V
If
!Ekl
<
sk
tk.
tk
1
k
then
IEk+ I < IE kI
(6)
k
(7)
(8)
tk
+ l
< t
(9)
We will prove the relations (5) - (9) below.
First we will investigate
the consequences of these relations.
tO
The fact that the number of pivots is at least
since
follows from (9)
tr = O.
IEki < tO
From (7), (8) and (9) we see that
Thus the number of consecutive iterations for which
for
t0 - 1
by (6) (If
Vk + l $ Vk
for which
at most
Vk
0
then
is at most
Ekl > 1 .).
k
Vk+
[..r].
= Vk
is at most
Since the number of iterations
by (5), the total number of iterations is
m
t °m = tm.
To prove (5) - (9) we consider tree
is the edge that is pivoted in at the
Suppose that edge
e = (i5, i4)
Tk.
Suppose that
k-th pivot, and thus
e' = (i2, i3)
e'
is the edge pivoted out of tree
Tk+l - Tk.
T . Now
let us consider Figure 5, which represents the circuit created upon adding
edge (i2, i3 ) to
Tk.
In Figure 5, i0
"edges" in Figure 5 represent paths in
is the source vertex
T .
0, and the
Since we will often refer to
the paths in Figure 5 we will sometimes drop the superscript
k.
We do not assume that the vertices in Figure 5 are distinct.
example,
i = i4
then
If, for
is the trivial path consisting of a
P(il, i4)
single vertex.
The colors of the edges in
Tk + l
(10.1) Edge
is yellow in
e' = (i2, i3)
(10.2) If edge
e
e
b P(i5, i3 )
may be summarized as follows.
and
is colored the same in
Tk
e
T
k+1
T - e, then
and in
Tk+ l
7.
(10.3) If edge
e P(i5, i3 )
e
orientations in
Tk
then
and
e
Tk+l.
has different
(Switching orientation
changes red edges to yellow and changes yellow edges to red.)
We are now ready to prove (5).
Tk .
in
i5 i pk(o, v).
Then
k+1.
T
Otherwise
k+1
Since
*
Let
*
P
that
k+(0, v)
V k + l = Vk .
e
e
e
E
k
is green in
and
v
is green
*
Ek+l c Ek
i2
*
pk(O, e ), and
i2
is red in
Tk.
We will now prove that
k+1
- Ek + l , this will complete the proof of (6).
be a maximum red edge in
is maximum,
k
We first claim that
yk+l _-V k , contrary to assumption.
i3
k
c E.
Since
pk(O, v) =
v
Thus (5) is true.
.
Suppose now that
E
Thus
Suppose that vertex
e
P .
k+1
Tk
In fact
P
*
Let
P
*
k+l
=P
(O, e ).
n P(i5, i3) = 0. Thus
k
T.
is a maximal red edge in
We have thus shown
and thus (6) is true.
Relation (7) is immediate since the set of maximum red edges forms an
Sk . (An anti-chain is a set of unrelated elements in
anti-chain in
To see that relation (8) is valid, we first note that
Sk .
since the minimal red edges are an anti-chain in
ei
let
Ri
denote the maximal red-green chain of
We claim that each red edge
sk < tk
show that
minimal in
Pk(e', e)
k
P .
e' of Tk is in some chain
and complete the proof.
Then
e'
Tk
ei
ei
tk
For each red edge
containing ei.
Ri, and this will
Suppose that
for some red edge
sk
Sk).
e'
k
in Sk.
is not
Then
c Ri, and thus (8) is true.
We now consider relation (9).
edges of
Tk.
Mk
Let
denote the set of minimal red
Our proof first takes into consideration the set
Mk n Mk+l
We state the result as Lemma 1.
LEMMA 1.
Then
__s_l
e*
E
Mk
_r
Suppose that
if and only if
* T
e
e*
T
u
Tk+
T1
and that
M+l.
______
*
e
P(i4 , i3 ).
III
8.
PROOF.
Suppose that
e
is a maximum red edge in
Mk
E
Tk,
and
e*
since
Tk+l
is yellow.
P(i5 , i3 )
contradicts that
Mk
e
and that
=
e*
P
e* ~ P(i0 , i4 ).
kl
T
(10)
P(e*, e')
e'.
e*
Mk+l
be a red-green
(i2 , i3) i P
Then
P
does not contain
k
T.
*
it follows that
P
= P(e*, e')
e'.
e* I P(i3, i5 ).
and
E 1Mk+l
This
Suppose further that
is a red-green chain in
Since
Thus no edge of
.
(i5 , i4)
M.
E
terminates at the red edge
a path in
P
Since
We suppose that
Therefore, the chain
and by
Suppose now that
e*
Let
terminating at the red edge
(i2 , i3)
any edge of
P(i4 , i3).
P(i0 , i4 ).
and we will derive a contradiction.
chain in
e*
P*
(i4 , i5 )
*
e
that
is maximum, we know that
is in (i5, i3 )
Thus contradicts that
Tk
k+l
E
and thus
P*
is also
, completing the proof of
the Lemma.
O
To complete the proof of (9) we will define a
into (but not necessarily onto)
at most one element of
Mk
Mk .
1:1
M k+ l
mapping of
However, we will show that there is
that is not in the range of the mapping, and
this will complete the proof.
Let
f
M
k+l
+
k
Mk
be defined as follows.
let
f(e*) = e .
For
e* E P(i 3 , i5 ) n Mk+l
P(i3, i5 )
then let
For
*
e
E
By Lemma 1, we are left with edges on the path
let
that is closest to
f(e*)
e .
If
P(i3,
be the unique yellow edge
Pk+l (e*, i5)
we
e'
i5 ).
in
has no yellow edges,
f(e*) = (i5 , i4 ).
We first note that
f(e*)
is red in
Tk
by relation (10).
note that the mapping is
1:1.
such that
In such a case, one can show that
f(e*) = f(et).
Pk+l(e', e*)
Mk+l
k
k+ l
Mk n Mk+,
Otherwise there are two edges
is a red-green chain and thus at most one of
We also
e
P
and
e'
(e*, e') or
e*, e'
is in
i5
i2
Figure 5.
The circuit created by adding edge (i2 , i 3 )
to Tk.
ir_*___DII__·___1_111______
-
9.
in
Tk
chain in
of
Pk+l(e
We claim that
P(i5 , i3 ).
be on the path
(Otherwise,
P(e,
e
*
than is
that
Pk+l(e*, i')
edge
e
e".)
Tk+ l
e"
e
But then
is a
P
f(e*)
k+l
e"
since
(i',
P
must
e")
is
We now claim
e".
e
than is
e',
This completes the proof of the
Pk(i, i
such that
Mk - f(Mk+l).
P(i5, i3 )
attention to the path
Let
i
'tk+l
tk - 1", we show that
By Lemma 1, we may restrict
e'
i*
e* r Mk n P(i*, i4 ), then
We claim first that if
P(i3, i5)
be the vertex on
is a red-green chain and such that
3)
To see this, we let
e .
and
P(i5 , i3 ),
is closer to
f(e*).
e"
tk+lt <
there is at most one edge in
to
We note that
Otherwise, there is a yellow
To complete the proof of the relation
i5.
T
terminating at the red edge
is a red-green chain.
on the path.
k(i
) u
k(e',
Moreover,
Tk.
is yellow in
e
Since
contradicting our definition of
to
=
P
is a red-green chain terminating
is yellow in
e"
since
i5)
a red-green chain in
relation
e")
be the last vertex
i'
This now contradicts our definition of
red-green chain.
closer to
Thus
is a red-green
e", and this will complete the contradiction.
at the red edge
is
Let
e".
P(i5 , i3 ).
u Pk+l(i',
')
i
,
P* = Pk(e', e")
and that
terminating at the red edge
that is also on the path
P
e"
e' = f(e*)
Suppose that
Tk.
is a minimal red edge
f(e*)
We now prove via a contradiction that
be the yellow edge in
Pk(e*, i3 )
e*
k*
3
Pk(i , i ) n Mk.
Suppose that
feasible.
Let
t
f(Mk+l).
e' E
This completes the
O
proof of Theorem 1.
THEOREM 2.
E
that is closest
A symmetric argument to the one given above shows that
Finally, there is at most one edge in
is closest
B
is a feasible basis that is not strongly
be the number of minimal red edges in the partial order
induced by the tree corresponding to basis
B.
Then the number of pivots
e).
10.
required to reach strong feasibility is at least
t.
Moreover, if the
directed graph is complete and if we are permitted to pivot in any edge,
then the minimum number of pivots to reach strong feasibility is exactly
PROOF.
An examination of the proof in Theorem 1
"t k+
that
t.
t-k
1",
will show that the proof does not rely on the fact that the edge pivoted
out is a maximum red edge.
Thus the number of dual pivots required to reach
strong feasibility is at least
exactly
t
t.
To prove that there is a sequence of
pivots to reach strong feasibility, we prove the equivalent
result that there is a single pivot that reduces the number of minimal red
edges from
Let
t
to
P(e*, e')
minimal red edge
of
P(e*, e').
edge
t - 1.
be a red-green chain from a maximum red edge
e'.
Let
i
and
j
T'
has at most
(i, j)
and pivot out
t - 1
minimal red edges.
If we consider Figure 5 once again, we note first that
and that
i3 = j.
Thus
P(i4, i3 )
any minimal red edge in
T'
minimal red edge in
Since
minimal red edges in
4.
T.
T'
is a red-green chain in
does not lie on
e'
is at most
to a
be the initial and terminal vertices
We claim that if we pivot in edge
e*, then the resulting tree
e*
P(i3 , i5 )
i4 = i1 = i2 = i
T.
Moreover,
and thus is a
T - T', it follows that the number of
0
t - 1, completing the proof.
The Parametric Network Flow Algorithm
Consider the parametric linear program
Minimize
Subject to
Lg(E)
cx
Lg(G)
Ax = b + g(G)
x > O.
We will soon specify a vector-valued function
Lg(e)
very efficiently.
Our choice of
g
g
for which we can solve
is based on ideas from
Edmonds-Karp scaling technique and on the following Lemma concerning network
flows.
_
III
11.
LEMMA 2.
Suppose that
min(cx : Ax = b, x > 0).
flow problem
(1)
is a strongly feasible basis for the network
B
b' < b,
If
Then the following are true.
n
is integral and
Z (bi - b) < , then B
b
is also feasible for the network flow problem
min(cx : Ax = b', x 2>0).
(2)
b'
If
b
and if
is feasible for the network flow
B
min(cx : Ax = b', x > 0), then
problem
be the spanning tree corresponding to the
T
Let
By hypothesis,
upward edge of
has no red edges and thus the flow in any
T
b, the flow in any upward edge of
To obtain the basic flow of
Z(bi - b
E
T
B
and
is at least one.
from the basic feasible flow of
b'
units of flow along the path
b i - bi
: i
By the unimodularity of
is strictly positive.
T
the integrality of
one sends
for
Statement (2) is proved as part of Theorem 1 of Orlin (1983).
We next consider (1).
B.
0)
b* < b.
b'
PROOF.
basis
is also feasible
min(cx : Ax = b*, x
for the network flow problem
all
B
PT( 0 , i).
b,
Since
1, the resulting flow is non-negative and hence
[l..m])
feasible.
Let
a
bi
Let us now rewrite
i
+ 1)1 : 1
t = max(rlog(Ibi
<
m).
as
t-l
b i = bti2t -
bki2k ,
Z
for
iE [l ..m]
i.
We now define
(11)
k=O
where
bki
0 or 1 for all
is
For each triple
i E [l..m] ,
g = (gi)
as follows.
of integers with
i, j,
E [0..t-l] , let
j E [O..m-l] , and
Z
bki2k
if
j
[i..mJ
k=O
gi(Im + j)
-1
Z
k= 0
(12)
bki
k
2k
if
j
[O..i-J.
12.
The Parametric Network Flow Algorithm
(13.0)
Obtain an optimal strongly feasible basis
= tm.
for
for
L g(').
solution.
for
L (e)
(We will discuss this step in more detail below).
Determine the minimum integral value
(13.1)
B
If
O'
O'
such that
B
0, then quit with the optimum basic feasible
<
Otherwise, continue.
Perform dual pivots using procedure (4) until either
(13.2)
strongly feasible basis
some
is obtained or
B
partition
Lg(e)
(a) a
(b) F(T, e) = 0
In case (a), return to step (13.1).
T.
is feasible
In case
for
(b),
into two network flow problems as described by
Cunningham (1976).
Suppose that the parametric algorithm (13) is used to solve
THEOREM 3.
Lg()
most
with
mb*, where
(11) of
e*
We will henceforth abbreviate
B
(14)
and
(15)
B
Lg(e)
is optimal and strongly feasible for
and that
such that
is the total number of ones in the binary representation
b*
b.
PROOF.
the basis
Then the total number of pivots is at
defined as in (12).
g
'
L(O').
L(o).
L(O*)
is the minimal integral value of
is feasible for
' <
as
Suppose that
for the integer
chosen in (13.1)
We claim that
.
The number of dual pivots to create a strongly feasible basis for
L(1')
is at most
m(e* -
').
Relation (14) is a consequence of (1) of Lemma 2 and our construction of
g.
(In order to apply Lemma 2 it will be necessary to divide the right hand
side coefficients
b - g(e)
a suitable choice of
2k
k.)
We now consider (15).
·
by the least common divisor, which is
Let
T
be the optimal spanning tree for
1_··rC_l____l___l_____l____lslll___
for
III
13.
P
(e*).
in (13),
V:
{i
ISI
PT( 0,
path
S
Let
i)
gi(') < gi(O*)}.
e'.
for
i E S, it follows that no edge of any of these paths is
Moreover, since we are sending flow along each
for
L(O*).)
most
ISI.
at most
Thus the set
L(O').
{PT( 0 , i) : i E S}
red-green chains that covers all of the red-edges of
ISI
with respect to
g
e* -
yellow with respect to the flow for
is a set of
By our construction of
L(e').
(No other edge is red since
Thus the number of minimal red edges in
T
is strongly feasible
T
T
for
L(O*)
is at
By Theorem 1, the number of pivots to reach strong feasibility is
m(O* -
mSI
').
Initialization of the Algorithm
In step (13.0), we assume that we start with a strongly feasible basis
for the network flow problem
Mimimize
cx
Subject to
-Ax = 2tb '
x
where
or
b' = 0
i
-1
We rewrite this problem as
P (tm).
(16)
0
according as
b
1
is non-positive or positive.
Then
(16) is a shortest path and may be solved via a number of different procedures.
If the optimum basis for the shortest path problem is not strongly feasible,
then we may obtain a strongly feasible optimum basis with at most
m2
(In fact, the simplex algorithm
additional pivots, as proved in Theorem 1.
with Dantzig's pivot rule solves the shortest path problem in a number of
pivots that is bounded by a polynomial in
On the Binary Representation of
IVI,
as proved by Orlin (1983)).
b
The algorithm given above also works if the function
g(e)
monotonically decreasing rather than increasing. (It does rely on
monotonic).
-b
ti
In this case we could write
2t + Z(bki2k : k e [0..t-l]).
ki
bi
is
g
being
as
In this case, the binary representation
14.
of
bi
is the ordinary one if
b i > 0.
The previous representation was the
ordinary representation of negative integers
If
g
bi.
is monotonically decreasing, the algorithm works essentially the
same way as before except that the roles of yellow edges and red edges are
reversed.
A Speed-up Technique
In (13) we defined the function
g
in a specific way.
However, the
computational bound would be valid if we chose any parametrization such that
g(O)
differs from
bit of accuracy.
g(
+ 1)
in at most one component and only in the last
It may be worthwhile in practice to consider a heuristic
procedure that determines which component should vary at the value
.
In
this way one may be able to decrease the number of pivots.
We also note that the pivoting technique consists of dual pivots.
Unfortunately performing dual pivots requires
O( Ef)
steps per iteration
as opposed to the faster methods for performing primal pivots.
Some Concluding Remarks
Although the above procedure was developed primarily for theoretical
reasons, we hope that the algorithm will prove to be efficient in practice.
As of this time, we have insufficient computational experience with the
algorithm to assess its efficacy.
The above parametric network simplex algorithm runs in polynomial time, i.e.,
time that is polynomially bounded in the size of the data.
It is an
interesting open question as to whether the number of pivots is bounded by a
polynomial in IV!.
It appears that the "equivalence" arguments of Lemma 3 of
this author (1983) are not strong enough to prove such a bound for the
parametric algorithm.
1_1
_
REFERENCES
Cunningham, W. (1976).
11, 105-116.
A network simplex method.
Dantzig (1963). Linear Programming and Extensions.
Press. Princeton, N.J.
Mathematical Programming
Princeton University
Edmonds, J. and R. Karp (1972). Theoretical improvements in algorithmic
efficiency for network flow problems. Journal of the ACM 19, 248-264.
Ikura, Y. and G. Nemhauser (1983).
Unpublished manuscript.
Orlin, J. (1983). On the simplex algorithm for networks and generalized
networks. Working Paper. Sloan School of Management, MIT.
Zadeh, N. (1973). A bad network flow problem for the simplex method and
other minimum cost flow algorithms. Mathematical Programming 5,
255-266.
-- -. I -- ---
- .....'--- - - -...
----- - .I-I.........---
I.---I. --... , ".·