Fracture Characterization from Seismic Sudhish Kumar Bakku
advertisement

Fracture Characterization from Seismic
Measurements in a Borehole
by
Sudhish Kumar Bakku
B.Tech., Indian Institute of Technology Roorkee (2007)
S.M., Massachusetts Institute of Technology (2010)
Submitted to the Department of Earth Atmospheric and Planetary
Sciences
in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
February 2015
Massachusetts Institute of Technology 2015. All rights reserved.
Signature redacted
Author.......
..........................
Depart ent of Earth Atmospheric and Planetary Sciences
Nov 12, 2014
Signature redacted
Certified by.........
Signature
....................................
Michael Fehler
Senior Research Scientist
redacted
Thesis Supervisor
.........................
Robert van der Hilst
Schlumberger Professor of Earth Sciences
Head, Department of Earth Atmospheric and Planetary Sciences
A ccepted by ...
cmLC
0
%.11%w
LLo
Dedicated to my Loving Parents,
Udayasree and Sriramulu Bakku.
3
4
Fracture Characterization from Seismic Measurements in a
Borehole
by
Sudhish Kumar Bakku
Submitted to the Department of Earth Atmospheric and Planetary Sciences
on Nov 12, 2014, in partial fulfillment of the requirements for the degree of
Doctor of Philosophy
Abstract
Fracture characterization is important for optimal recovery of hydrocarbons. In this
thesis, we develop techniques to characterize natural and hydraulic fractures using
seismic measurements in a borehole.
We first develop methods to characterize a fracture intersecting an open borehole
by studying tubewave generation and attenuation at the fracture. By numerically
studying the dispersion relation for fluid pressure in the fracture, we show that the
tubewave measurements made in the transition regime from low to high frequency can
constrain fracture compliance, aperture and length, while measurements made in the
high-frequency regime can place a lower bound on fracture compliance. Analysis of
field data suggest a large compliance value (10- 0 m/Pa) for a meter-scale fracture and
supports scaling of fracture compliance and applicability of scattering based methods
for fracture characterization on a reservoir scale.
We next study Distributed Acoustic Sensing (DAS), a novel Fiber Optic (FO) cable based seismic acquisition technology. We relate DAS measurements to traditional
geophone measurements and make a comprehensive study of factors that influence
DAS measurements. Using a layered borehole model, we analytically compare the
sensitivity of DAS measurements to P- and S-wave incidence at arbitrary angles for
the cases when the FO cable is installed in the borehole fluid or when cemented outside
the casing. In addition, we study the azimuthal placement of the cable, the effect of
cable design, and the effect of environmental conditions on time-lapse measurements.
We show that DAS is a reliable tool for time-lapse monitoring.
Finally, we analyze time-lapse DAS Vertical Seismic Profiling (VSP) data collected during a multi-stage hydraulic fracture treatment of a well drilled into a tightgas sandstone reservoir. We develop a processing workflow to mitigate the unique
challenges posed by DAS data and propose methods for DAS depth calibration. We
observe systematic and long-lived (over 10 days) time-lapse changes in the amplitudes
of direct P-waves and nearly no phase changes due to stimulation. We argue that
the time-lapse changes cannot be explained by measurement factors alone and that
they may be correlated to the stimulated volume. Though the current geometry is
not ideal, DAS is promising for hydraulic fracture monitoring.
Thesis Supervisor: Michael Fehler
Title: Senior Research Scientist
5
6
Acknowledgments
It gives me immense pleasure to recollect the many wonderful years I spent at MIT
and to thank all the amazing people who have been part of this journey and influenced
my life in their special ways. Along with it is a fear that I may forget mentioning
someone dear. My gratitudes to everyone that I mention here and others whom I
mistakenly miss. Seven years is a long time and there are countless people to thank
and anecdotes to share. I am sure I will not do justice to all.
My journey at MIT started with me reluctantly (to save money on applications)
applying to MIT at the behest of my dedicated friends Saratchandra Palagummi
(Paul), Venkat Avadhanulu (Lulu), Vinod Vavilapalli (Potter) and Vijay Ganesh
(Haddu). That day has set into motion the events to follow. I am thankful to Prof.
Brian Evans for admitting me into his group as a Masters student even though I knew
nothing about Earth sciences. Embodying the spirit of MIT, Brian asked me to come
to the university and explore the research areas. That is a luxury very few have and
I feel blessed to be one such. MIT has transformed me as a person and a researcher:
I was given the freedom to explore many different projects, take inter-disciplinary
courses and encouraged to be inquisitive. It is humbling to be surrounded by very
smart people. There is so much to learn and so many interesting things happening
around, it is with heavy heart that I leave this wonderful place. My sincere thanks
to MIT and everyone who makes it such an amazing place.
Foremost, I thank my advisor Dr. Michael Fehler for his guidance and mentorship
over the last five years. After my masters, Mike was kind to take me on as a graduate
student even though I had little experience working on seismology. Mike has been
very patient and encouraging since then while I explored different ideas and faltered
at some badly. He is a terrific seismologist and I always left learning something new
after a discussion with him. He always had new ideas up his sleeve every time I hit a
dead end. His optimism and passion for science are contagious and I hope they stick
to me always. He is a caring advisor, concerned about the overall well being of all his
students and generously shared his wisdom both in science and personal life. Mike
is an inspiration for me with all the hard work he puts in, an efficient multi-tasker
atmany different roles. Amid all this, he still finds time for students. Thank you,
Mike, for being an amazing advisor and a mentor.
Prof. Alison Malcolm has been my academic advisor, teacher and a thesis committee member. She brought in a different perspective and always reminded me of
the need for focus and defining time-bound goals. Not only is she an amazing teacher
but also a caring mentor. I learned seismic imaging and presentation skills from her.
We shared a lot of funny moments during the communication course where she made
us watch ourselves speak. She was on my generals committee as well as my thesis
committee and generously guided me throughout all these years. Thank you, Alison.
I thank my thesis committee for all their guidance and keeping me on track. As a
Master's advisor and generals and thesis committee member, Prof. Brian Evans has
been a grounding presence and guiding force for me at MIT. Prof. Nafi Toks6z is a
great source of knowledge and wisdom. I consulted him on science, career decisions
and guidance at MIT. He is always very kind to make time for students despite his
7
busy schedule and health. To put things in perspective, he once reminded me that
there is an entire life to contribute and that a PhD is only the first step. Dr. Mark
Willis has been a mentor to me from my early days at MIT. He helped me navigate
through MIT and guided me in taking many tough decisions in life, both personal
and career wise. He spent many hours teaching me seismic processing and about life
in industry. He generously hosts the annual ERL alumni get together at his home in
Houston and introduces young students like me to many industry experts and thus
helps build our network. Prof. Taylor Perron very generously accepted to be on my
committee just a few months before my defense and was equally quick in catching up
and providing me valuable feedback. The committee has been extremely patient and
supportive during the last few months as I repeatedly missed deadlines. Thank you
all very much.
Dr. Daniel Burns is my unofficial second advisor. I spent long hours learning
borehole geophysics and lessons on life from him. He co-authored two of the chapters
in my thesis and I greatly benefited from his scientific insight. He is very approachable,
supportive and optimistic. During tough days, a chat with Dan would instantly lift
up my spirits. Another important person who influenced my stay at MIT is Prof.
Dale Morgan. Dale is a father figure and has been a great advisor and a good
friend. He always pushed me to strive for the best and think on a larger scale. Our
countless discussions on science, politics and religion were always challenging and
thought provoking. I regret not being able to make to any of his field trips. Thank
you Dale and Dan.
I would like to thank all my collaborators during my stay at MIT. Firstly, I thank
Samantha Grandhi for inviting me to Shell and helping me get access to DAS data.
It inspired a significant part of the thesis. Peter Wills was my mentor while I interned
at Shell and he guided me in understanding and processing the DAS data. Peter went
out of his way to help me with both technical aspects and dealing with bureaucracy.
In addition, Albena Mateeva and Kees Hornman at Shell provided valuable inputs to
the DAS chapters in the thesis. Numerous intense discussions with Drs. Mark Willis,
Doug Miller, Greg Duckworth, Arthur Cheng, Prof. Haruo Sato and Prof. Boris
Gurevich enhanced my understanding of DAS, borehole geophysics and the interpretation of the time-lapse DAS Data. I would also like to thank Shell International
E&P Inc. for providing me the DAS data set and Optasonse for providing support. I
learned a lot about fractures and fracture characterization during numerous conversations with Dr. Steve Brown, Dr. Xinding Fang and Dr. Yingcai Zheng. Xinding very
generously allowed me to use his finite difference code to run fracture simulations.
Yingcai is a very knowledgeable seismologist and gave excellent feedback. Dr. Zhenya
Zhu very patiently trained me on using the acoustics lab and helped with everything
related to the lab.
Dr.Yves Bernabe, Dr.Steve Hickman and Dr. Nick Beeler are extraordinary researchers I was fortunate enough to work with. I am thankful to them for guiding
me during my masters and beyond. I would also like to thank my mentors during my
summer internships Ricko Wardhana (BP) and Bilgin Atlundas (Schlumberger) for
helping me make the most out of the internships. I benefitted immensely from the
courses I took from Prof. Stephane Rondenay, Prof. Laurent Demanet, Prof. Robert
8
van der Hilst and Prof. Dale Morgan. Bill Rodi is a great resource at ERL, well
knowledgeable in inverse theory and extremely helpful. I regret not being able to get
the best out of him.
I would like to thank the extended Earth Resources Laboratory (ERL) family
for all the support during these past 7 years. I made long lasting friendships that
I will cherish for the rest of my life. Sue Turbak has been the bonding gel to keep
ERL together and meticulously took care of everyone's need. She has been a source
of support and a good friend. Natalie Counts has taken over Sue's responsibilities
over the past few months and is equally amazing. Anna Shaughnessy advised me on
many student body organizational aspects and helped me take career decisions. Terri
Macloon helped a lot on dealing with the financial issues of the student run TechGS.
I feel lucky to have known Mirna Slim, Ahmad Zamanian, Di Yang, Yulia Agramakova, Diego Concha, Gabi Melo Silva, Alan Richardson, Xinding Fang, Abdulaziz
AlMuhaidib, Brain Willemsen (fondly Lucas), Junlun Li, Hui Huang (mom), Nasruddin Nazerali, Xuefang Shang, Fixian Song, Kang Hyeun Ji, Alejandra Quintanilla,
Hussam Busfar,Bongani Mashele, Fred Pearce, Sami Alsaadan, Scott Burdick, Yang
Zang, Xin, Tim Sayer, Noa Bechor Ben Dov, Martina Coccia, Sedar Sahin, Piero Poli,
Thomas Gallot,Oleg Poliannikov, Tianrun Chen, Greg Ely, Jared Atkinson, Chunquan Yu, Chen Gu, Jing Liu, Haoyue Wang, Yuval Tal, Manuel Torres, Eva Golos,
Dylan Mikesell, Darrell Coles, Zhulin Yu, Lili Xu, Hua Wang, Elita, Peter Kang,
Xuan, Pierre Gouedard, Huajiang Yao, Haijiang Zhang, Berenice Froment, Elizabeth
Day, Saleh Al Nasser, Leonardo Zepada, Bing, and others. I thank Mirna, Di, Gabi,
Ahmad, Diego, Yulia , Aziz, Andrey, Nas, and Brain for the countless weekend outings and fun stuff we did together. The gym and swimming team included Di, Diego
and Ahmad. Diego very meticulously held it together for a very long time until Di
broke his hand and things fell apart. Alan has been a great resource for computing
and juicy gossip. He mercilessly extracted every little piece of information and I always dreaded hearing 'Any news?'. Brain and I almost froze to death to save a few
bucks, thanks to Alan. Ahmad and Nas were my companions during the all night
thesis writing sessions. The postdocs at ERL were a wise lot. It was always fun to
grab a beer with them and occasional lunches. I never figured out on which side of
the grad-postdoc divide Scott Burdick stood. But I forgive him since he beats Nate
in biking. There were many visiting researchers, post-docs and students at ERL who
made it even more fun to be around. Jonathan Kane has been both part of ERL
(alumni) and Shell. He was very kind in introducing me to people at Shell and also
facilitating the process of my internship and employment with Shell.
I had the pleasure of friendship with Dan Chavas, Mike Sori, Stephen Messenger,
Ben Mandler, Arthur Olive, Marie Giron, Elena Steponaitis, Erin Shea, Ruel Jerry
while working on EGSAC. We had great times together, especially the Long Pond
Trip. I should probably stop here. What happens at Long Pond stays at Long
Pond. Others from EAPS who have been good friends are Sonia M T. Sanchez,
Alex Evans, Frank Centinello, Sharon Newman, Hendrik Lenferink, Yodit Tewelde,
Aron Schwanberg, Ben Black and many more. Having stayed for seven years, I
was fortunate enough to be kicked around many offices and thus befriend many. My
journey started with my faithful friend Nathaniel Dixon who stayed at MIT almost as
9
long as I did. I am thankful to him for helping me acclimatize to American culture and
for adopting me into his family. The next dose of american culture (Texan?) came
from the chatty Beatrice Parker, bayesian Ahmad Zamanian and caving Clarion.
Otherwise, the office space has been pretty much international (Chinese) with the
likes of Xinding Fang, Di Yang, Hua Wang, Andrey Shabelansky, Bongani Mashele
and Jing. I was the sole customer for all Xinding's discounted movie tickets. Hua
sometimes read us Mormon bible. Di pumped up muscles staring at posters and
empty protein bottles. My philosophical discussions with Andrey and Bongani were
endless (probably useless). Meanwhile, Gabi was conveniently lost in her heavy metal.
EAPS is blessed with amazing staff. Vicki McKenna and Carol Sprague at the
EAPS headquarters always looked out for me and were extremely helpful. It always
feels like home talking to Roberta Allard and she goes out of her way to help everyone.
Linda Mienke tirelessly deals with all our software and hardware issues. I am thankful
to all of them. David Keazer, the wise janitor, is a good friend to all of us night owls.
Many thanks to David for taking every opportunity to remind me of my increasing
weight and pushing me to get out of MIT!
I want to thank my amazing roommates Sumeet Kumar, Vivek Raghunathan,
Abishek Kashinath, and Karthik Kumar for the wonderful times together. All the
stupid things we did together remain memorable stories. How easy is it to set your
house on fire on a cold winter night? Many thanks to my dear friends Kushal Kedia,
Raghavendra Hosur, Harshad Kasture, Sahil Sahni, Sriram Emani, Sarvee Diwan,
Chaithanya Misal, Harish Sundaresh, Vikrant Vaze, Nikhil Galagali, Ankur Sinha,
Kavyakamal Manyapu, Suman Bose and others. You made me feel at home and
part of a huge family. Other friends who made my stay in Boston wonderful are
Naresh Kosaraju, Yanni, John Mangones, Tricia Chan, Dely Gisagra, Jon Labrecque,
and Marylin. I am very thankful to all my friends from college who are my support
network: Sarat, Vinod, Avadhanulu, Ganesh, Madhur Johri, Naresh, Karthik, Dinesh,
Srikant, Bharat, Naveen, Sujith, Mubeen and all others in India. I really enjoy the
annual re-union trips that we take.
The most fortunate thing to happen to me during my stay at MIT is my fiancee
Sara (Sarada Sivaraman). Her dedicated friendship and unconditional love kept me
motivated in the darkest of the times. She always has a way to keep my spirits up and
cheer me up with riddles. She worked as hard, kept me company for long hours- and
made sure that I was well fed with delicious home made food. She is my English coach,
personal proof reader, partner-in-crime and party planner. Her company made my
life much easier and enjoyable. Sara, thank you for being there for me. I am looking
forward to the wonderful journey ahead together.
My parents deserve the greatest thanks for making me the person I am today. I
cannot thank them enough for all the sacrifices, selfless love and support. I like to
recollect how my father used to enthusiastically narrate to me the big-bang theory
for the millionth time. He was always eager to answer my curiosity with the best of
his knowledge and tirelessly fought many chicken or egg first debates. My father is
an inspiration for me to keep learning and has been my guide and mentor in life. My
mother always magically knows what I want even before I say it. Her love and care
are unparalleled. Both my parents encouraged me to shoot for the best and imbibed
10
in me the spirit to put in my best regardless of the results. It gives immense strength
to know that they are always there for me to fall back on to. I am blessed to have
such amazing parents. Thank you, amma and nanna! I am lucky to have my younger
brother Ranjith, a life long friend and accomplice. He has endured the worst of me
and has seen all the dark sides not known to the world. My cousin Satish has always
been my philosophical buddy. I thank all my other cousins, uncles and aunts for the
faith in me and supporting me through out. I miss spending Sankranti with everyone.
My grandmother Muvvala Gangamma is the Dark Knight who toiled hard raising me
and my brother. I am indebted to her for my life.
Finally, I thank ENI, MIT Energy Initiative, and Total S.A. for financially supporting me during the course of the PhD.
11
12
Contents
1
2
Introduction
29
1.1
Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
1.2
Thesis Outline and Contributions . . . . . . . . . . . . . . . . . . . .
34
Fracture Compliance Estimation using Borehole Tubewaves
39
2.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
2.1.1
Fracture Compliance . . . . . . . . . . . . . . . . . . . . . . .
41
Theorertical Formulation . . . . . . . . . . . . . . . . . . . . . . . . .
43
2.2.1
Tube-wave generation in a borehole . . . . . . . . . . . . . . .
43
2.2.2
Tubewave attenuation in a borehole . . . . . . . . . . . . . . .
50
2.2.3
Effect of dynamic tortuosity and permeability
. . . . . . . . .
53
Field Data Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
2.3.1
Overview
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
2.3.2
Field example . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
2.2
2.3
3
2.4
Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..
2.5
Conclusions
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
2.6
Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
59
Distributed Acoustic Sensing for Vertical Seismic Profiling
71
3.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
3.2
Distributed Acoustic Sensing . . . . . . . . . . . . . . . . . . . . . . .
74
13
3.2.2
Coherent Optical Time Domain Reflectometry
75
3.2.3
Lim itations
.
.
75
79
Comparison to Geophones . . . . . . . . . . . . . .
80
3.3.1
Broad-side sensitivity . . . . . . . . . . . . .
83
3.3.2
Effect of gauge length
. . . . . . . . . . . .
.
.
.
. . . . . . . . . . . . . . . . . .
3.4
Strain and temperature effects on DAS measurements
86
3.5
Effect of borehole on DAS VSP measurements
89
.
84
Layered Borehole Model . . . . . . . . . . .
90
3.5.2
FO Cable in the borehole fluid . . . . . . . .
93
3.5.3
FO Cable cemented outside the casing
. . .
96
Effect of cable design on DAS VSP measurements .
98
3.6.1
Coupling in fluid . . . . . . . . . . . . . . .
100
3.6.2
Coupling in solid . . . . . . . . . . . . . . .
104
3.7
Considerations for Time-lapse DAS VSP . . . . . .
106
3.8
Conclusions . . . . . . . . . . . . . . . . . . . . . .
110
3.9
Figures . . . . . . . . . . . . . . . . . . . . . . . . .
114
.
.
.
.
.
.
.
.
.
3.5.1
3.6
Time-lapse Monitoring of Hydraulic Fracturing using DAS
129
Introduction . . . . . . . . . . . . . . . . . . . . . . .
129
4.2
Hydraulic Fracturing . . . . . . . . . . . . . . . . . .
132
4.3
Field Experiment
. . . . . . . . . . . . . . . . . . . .
133
4.3.1
Field Geology . . . . . . . . . . . . . . . . . .
133
4.3.2
Well Completion and Stimulation Parameters
135
4.3.3
Seismic Acquisition
. .. . . . . . . . . . . .
135
4.3.4
Temperature Monitoring using DTS . . . . . .
137
DAS Challenges . . . . . . . . . . . . . . . . . . . . .
137
D C bias . . . . . . . . . . . . . . . . . . . . .
138
.
.
.
.
.
.
4.4
.
4.1
4.4.1
.
4
Scattering mechanisms . . . . . . . . . . . .
.
3.3
3.2.1
14
4.5
4.6
Spikes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
140
4.4.3
Depth Calibration
. . . . . . . . . . . . . . . . . . . . . . . .
141
Data Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
145
4.5.1
Pre-processing . . . . . . . . . . . . . . . . . . . . . . . . . . .
145
4.5.2
Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
148
4.5.3
Background model
. . . . . . . . . . . . . . . . . . . . . . . .
150
Time-lapse Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . .
152
4.6.1
Time-lapse Attributes
153
4.6.2
Analysis on direct P-wave
4.6.3
Analysis on up-going P-waves
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
154
. . . . . . . . . . . . . . . . . .
158
Interpretation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
159
4.7.1
Measurement system factors
. . . . . . . . . . . . . . . . . .
160
4.7.2
Formation changes
. . . . . . . . . . . . . . . . . . . . . . . .
163
4.8
Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
170
4.9
Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
174
4.7
5
4.4.2
Conclusions and Future Work
197
5.1
Summary of conclusions
. . . . . . . . . . . . . . . . . . . . . . . . .
197
5.2
Future directions
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
200
A Tube-wave generation and attenuation at a finite fracture
205
A.1
Tube-wave Generation
. . . . . . . . . . . . . . . . . . . . . . . . . .
205
A.2
Tube-wave Attenuation . . . . . . . . . . . . . . . . . . . . . . . . . .
207
B Layered Borehole Model
B.1 Displacement Potentials
209
. . . . . . . . . . . . . . . . . . . . . . . . .
209
B.2
Displacement-Stress Matrix
. . . . . . . . . . . . . . . . . . . . . . .
210
B.3
Displacement-stress vector for incident waves . . . . . . . . . . . . . .
215
15
C Reflection and Transmission Coefficients for Strain
217
References
219
16
List of Figures
2-1
Diagram showing tube-wave generation at a fracture intersecting a
borehole. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2
62
Propagation velocity for fluid pressure in the radial direction in a fracture, w
/
Re{}, is plotted against frequency for different values of
compliance and aperture. The solid lines represent varying compliance
when fracture aperture is 0.5 mm. The dotted lines represent varying
fracture aperture when fracture compliance is 10-9 m/Pa. The propagation velocity is obtained by numerically solving Tang's dispersion
relation using: af=1500 m/s, a=5800 m/s, f=3300 m/s, pf=1000
kg/m 3 , p = 2700 kg/m, v=10- 6 m 2 /s. The fluid properties correspond
to water. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3
62
Attenuation factor Im{(} for fluid pressure in a fracture is plotted
against frequency for different values of compliance and aperture. The
solid lines represent varying compliance when fracture aperture is 0.5
mm. The dotted lines represent varying fracture aperture when fracture compliance is 10-9 m/Pa. The parameters for this study are the
same as in Figure 2-2.
. . . . . . . . . . . . . . . . . . . . . . . . . .
17
63
2-4
Tube to P-wave pressure amplitude ratio is plotted against frequency
for a 0.5-mm-wide fracture with a fracture compliance of 10-
m/Pa,
intersecting a 15 cm diameter borehole. The formation and fluid properties are the same as in Figure 2-2. . . . . . . . . . . . . . . . . . . .
2-5
63
Tube to P-wave pressure amplitude ratio plotted against frequency for
different fracture compliance values, taking LO = 0.5 mm, while other
parameters are kept constant. Note that the amplitude ratio decreases
with decreasing compliance and the transition regime is independent
of compliance. The parameters for this study are the same as in Figure
2-4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-6
64
Tube to P-wave pressure amplitude ratios are plotted against frequency
for different values of aperture, taking Z = 10- 9 m/Pa, while other
parameters are kept constant. Note that the transition regime moves
towards higher frequencies with decreasing aperture. Also, amplitude
ratio decreases with decreasing aperture. Medium parameters are the
same as in Figure 2-4.
2-7
. . . . . . . . . . . . . . . . . . . . . . . . . .
64
Tube to P-wave pressure amplitude ratios plotted against frequency
for different kinematic viscosity values, taking Z = 10
9
m/Pa and
LO = 0.5 mm, while other parameters are kept const-ant. Note that
the transition regime moves towards higher frequencies with increasing
viscosity. The parameters other than viscosity are the same as in Figure
2-4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-8
65
Tube to P-wave pressure amplitude ratio is plotted against frequency
for fractures of different fracture lengths, taking Z
=
10- 9 m/Pa and
LO = 0.5 mm, while other parameters are kept constant.
All other
parameters are the same as in Figure 2-4 . . . . . . . . . . . . . . . .
18
65
2-9
Schematic showing attenuation of tubewave at a fracture intersecting
a borehole. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
2-10 Transmission coefficient is plotted against frequency assuming a fracture compliance of 10
9
Pa/m and an aperture of 0.5 mm. The pa-
rameters for this study are the same as in Figure 2-4. . . . . . . . . .
66
2-11 Transmission coefficient is plotted against frequency for different fracture compliance values, taking LO = 0.5 mm, while other parameters
are kept constant.
Note that the transmission coefficient increases
with decreasing compliance and the transition regime is independent
of compliance. The parameters for this study are the same as in Figure
2-4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
2-12 Transmission coefficients are plotted against frequency for different values of aperture, taking Z = 10-' m/Pa, while other parameters are
kept constant. Note that the transition regime moves towards higher
frequencies with decreasing aperture. Also, transmission coefficient increases with decreasing aperture. Medium parameters are the same as
in 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
2-13 Transmission coefficient is plotted against frequency for different kinematic viscosity values, taking Z = 10
9
m/Pa and LO
=
0.5 mm, while
other parameters are kept constant. Note that the transition regime
moves towards higher frequencies with increasing viscosity.
The pa-
rameters other than viscosity are the same as in 2-4 . . . . . . . . . .
68
2-14 Transmission coefficient is plotted against frequency for fractures of
different sizes, taking Z = 10-
9
m/Pa and LO = 0.5 mm, while other
parameters are the same as in 2-4. . . . . . . . . . . . . . . . . . . . .
19
68
2-15 Amplitude ratio contours are plotted in the aperture, compliance parameter space for a frequency of 150 Hz. The parameters for the study
are the same as in Figure 2-2 and correspond to the field study at the
Mirror Lake borehole discussed in the field example section. Amplitude ratios estimated from the field data lie between 10 and 15. This
suggests that the lower bound on the compliance lies between 3 x 10-10
m/Pa and 10- 9 m/Pa (indicated by the black dotted lines) when fracture aperture is assumed to be lower than 1 mm.
3-1
. . . . . . . . . . .
69
A schematic description of the various components of the DAS system.
The phase-lag between the beat signals (S1+S2) formed from two scattering points in the fiber in the unstrained (blue) and strained (red)
state is proportional to the strain in that section of the fiber occurred
between the two sampling times ...
3-2
. . . . . . .... . . . . . . . .
.
Three different implementations of COTDR are shown: (a) Dual-Pulse
system (b) Single-Pulse system (c) Single-Pulse with Local Oscillator.
3-3
114
115
Sensitivity of a vertical component geophone and DAS as a function of
angle of incidence from z-axis. Dotted lines indicates negative polarity. 116
3-5
Averaging strain over a gauge-length is equivalent to applying a sinc
filter in the frequency domain. The amplitude response of the filter is
shown as a function of the wave-length. . . . . . . . . . . . . . . . . .
3-6
117
Borehole reception pattern for P- and SV-wave incidence on an open
borehole. The amplitude ratio of fluid pressure at borehole center (I A 1)
to the stress due to incident P-wave (JajOc,), away from the borehole,
is plotted against the incidence angle J for different frequencies and for
both hard (Berea Sandstone) and soft (Pierre Shale) formations. Note
differing amplitude scales for each plot. . . . . . . . . . . . . . . . . .
20
117
3-7
Amplitude ratio of pressure at the wall of an open borehole (Pb(r - rb))
to that at borehole center (Pb(r = 0)) is plotted against the azimuth
0 of the receiver for different frequencies and for P- and SV-wave incidence (6
=
450) in hard (Berea Sandstone) and soft (Pierre Shale)
formations. Azimuth is 1800 in the direction of the wave incidence.
3-8
.
118
Borehole reception pattern for P- and SV-wave incidence on a cased
borehole. The amplitude ratio of fluid pressure at borehole center (I P1)
to the stress due to incident P-wave (-I
u
I), away from the borehole,
is plotted against the incidence angle 3 for different frequencies and for
both hard (Berea Sandstone) and soft (Pierre Shale) formations. Note
differing amplitude scales for each plot. . . . . . . . . . . . . . . . . .
3-9
119
Axial strain sensitivity for DAS buried in an infinite homogenous elastic
solid. The amplitude ratio of strain in the z-direction (I Ec,) to the total
strain due to incident P-wave (JI
cI)
is plotted against the incidence
angle 3 for different frequencies and for P- and SV-wave incidence in
(a) hard (Berea Sandstone) and (b) soft (Pierre Shale) formations. The
maximum sensitivity for SV-wave incidence is proportional to
..
120
3-10 Axial strain sensitivity for DAS installed in the cement outside casing.
The amplitude ratio of strain in the z-direction at the casing-cement interface (Icz|) to the strain due to the incident P-wave (I cjI) is plotted
against the incidence angle 3 for different frequencies and for P- and
SV-wave incidence in hard (Berea Sandstone) and soft (Pierre Shale)
form ations.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
121
3-11 Ratio of the strain Ic,,(0) 1at the casing-cement boundary for arbitrary
azimuth to that at zero azimuth lzc (9 = 00) is plotted against the
azimuth 0 of the receiver for different frequencies and for P- and SVwave incidence (6 = 450) in hard (Berea Sandstone) and soft (Pierre
Shale) formations. Azimuth is 1800 in the direction of the wave incidence. 122
3-12 A schematic diagram of a typical FO cable cross section. A typical FO
cable has multiple optical fibers packaged inside metal or plastic jackets. 123
3-13 A schematic diagram of the modeled FO cable cross section.
. . . . .
123
3-14 Strain sensitivity of two-layered cable installed in borehole fluid is plotted against angle of incidence for both P-wave (solid lines) and SV-wave
(dotted lines) incidence at 100 Hz. Sensitivity is shown for open and
cased boreholes in hard (Berea Sandstone) and soft (Pierre Shale) form ations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
124
3-15 Strain sensitivity of three-layered cable installed in borehole fluid is
plotted against angle of incidence for both P-wave (solid lines) and
SV-wave (dotted lines) incidence at 100 Hz. Sensitivity is shown for
open and cased boreholes in hard (Berea Sandstone) and soft (Pierre
Shale) form ations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
125
3-16 Strain sensitivity of two-layered cable installed in cement is plotted
against angle of incidence for both P-wave (solid lines) and SV-wave
(dotted lines) incidence at 100 Hz. Sensitivity is shown for hard (Berea
Sandstone) and soft (Pierre Shale) formations. . . . . . . . . . . . . . 126
3-17 Strain sensitivity of three-layered cable installed in cement is plotted
against angle of incidence for both P-wave (solid lines) and SV-wave
(dotted lines) incidence at 100 Hz. Sensitivity is shown for hard (Berea
Sandstone) and soft (Pierre Shale) formations. . . . . . . . . . . . . .
22
126
3-18 Percentage change in strain sensitivity (A#/#Ej,,) for a cable installed
in borehole fluid as the elastic properties of the Teflon layer are varied
from the reference properties E = 3.06 GPa and v = 0.317.
The
change in sensitivity is the same for both P, SV-wave incidence at any
arbitrary angle of incidence.
. . . . . . . . . . . . . . . . . . . . . . .
127
outside the casing as the elastic properties of the Teflon layer are varied
from the reference properties E
=
3.06 GPa and v
=
0.317.
-
3-19 Percentage change in strain sensitivity (A#/#Ejx,) for a cable cemented
The
change in sensitivity is shown for P-wave incidence in Berea Sandstone
at 6 = 00, 0 = 00 and frequency 100 Hz. . . . . . . . . . . . . . . . . .
127
3-20 Percentage change in strain sensitivity (A#/#Ecj) for a cable cemented
outside the casing as the elastic properties of the Teflon layer are varied
from the reference properties E = 3.06 GPa and v = 0.317.
The
change in sensitivity is shown for SV-wave incidence Berea Sandstone
at 6 = 450, 0 = 0' and frequency 100 Hz. . . . . . . . . . . . . . . . .
128
3-21 Percentage change in strain sensitivity as the cement properties are
varied. Both P-wave velocity and S-wave velocity of the cement are
simultaneously perturbed as a percentage of the reference cement prop-
erties (a = 2823 m/s and 3 =1792 m/s). . . . . . . . . . . . . . . . .
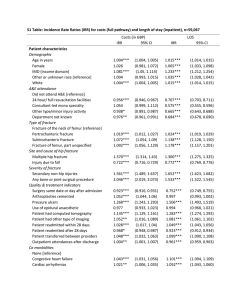
4-1
Stratigraphic sequence at the El Paso Natural Gas Company Wagon
Wheel No. 1 well located in the Pinedale Anticline.
4-2
128
. . . . . . . . .
174
A schematic diagram of well completion and the FO cable placement.
A scaled diagram of plug locations for all the stages is shown in the
inset of the stimulated zone. . . . . . . . . . . . . . . . . . . . . . . .
4-3
4-4
175
Fluid and proppant placed in the formation during the stimulation of
each of the stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
176
Plan-view of the well and the source locations A, B and C. . . . . . .
176
23
4-5
Uncorrelated and correlated sweeps before, during and after stimulation of stage 9 for source at location B.
4-6
. . . . . . . . . . . . . . . . 177
Uncorrelated trace recorded at channel 403 in the sweep shown in Figure 4-5e. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
4-7
DC bias (one number per trace) for each shot-gather (vibroseis sweep)
is plotted against the time of day when the sweep was collected and
the channel number. DC bias is related to the activity in the well and
depends on the phase of stimulation: A) Pre-stimulation B) Fracture
initiation C) Stimulation D) Post-stimulation. . . . . . . . . . . . . . 178
4-8
Integrated DC bias qualitatively follows the temperature measured in
the well using DTS. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-9
179
Spikes in the field and lab data are plotted aligned at the peak. When
normalized by the peak amplitude spikes in the field and lab fall on
the sam e curve. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
180
4-10 Shot-gathers showing (a) Tubewave generation during the perforation
shot for stage 9. (b) Tubewave reflection at stage 9 plug (c) Tubewave
reflection at the surface . . . . . . . . . . . . . . . . . . . . . . . . . .
181
4-11 DC bias is plotted for a sweep after stimulation of stage 9. Jump in
DC bias can be observed at the bottom perforation (channel 432).
.
181
4-12 a) Channels corresponding to plugs/perforations at each stage as identified from tube-wave reflections and DC bias changes. b) Calibration
plot for DAS channels. Red dots are the receiver depths estimated in
the field. Blue dots are the depths of the same channels after associating with a plug/perforation depth. Red crosses represent the depth
of the same channels after assigning depth from the best-fit line to the
blue dots. The slope of the best-fit line implied a channel spacing of
8.19 m eters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
182
4-13 Data processing workflow for time-lapse analysis of DAS data. . ..
.18 182
4-14 Data at various stages of the processing workflow in the order from (a)
to (f). Note the different time scale on correlated data and uncorrelated
data. The color scale on the correlated stacks is saturated to bring out
the reflections that are lower in amplitude (;
direct P-wave (-
0.05) compared to the
1). We did not apply any amplitude gain control.
.
183
4-15 Pre-processed stacks before the stimulation operations started in the
well and serve as baseline. Stacks corresponding to sources at the three
source locations are shown . . . . . . . . . . . . . . . . . . . . . . . .
184
4-16 Wave-field separation using median filter. The red line in the figures
denotes the arrival time of the direct P-wave.
. . . . . . . . . . . . .
185
4-17 Up- and down-going P-wave traces at channel 350 for baseline data
collected from source location B shown in Figure 4-16 . . . . . . . . .
186
4-18 Individual traces of the aligned down-going P-wave (a) before and (b)
after removal of remaining phases. The traces are taken from baseline
stack collected from source location B shown in Figure 4-16 . . . . . .
186
4-19 The spectrum of down-going P-wave as a function of depth (channel)
for the traces shown in Figure 4-18b . . . . . . . . . . . . . . . . . . .
187
4-20 Medium P-, S-wave velocities and P-wave quality factor are plotted
against the channel number (increasing depth). The plots for velocity
show velocity estimates from data at all the three source positions. The
Q factor
plots show the mean Q-value obtained from the data collected
at the three source positions with the error bars denoting the standard
deviation between the measurements. The stage numbers are labeled
in the figures. The horizontal black lines denote the plug locations. All
the four plots are to the same scale. . . . . . . . . . . . . . . . . . . .
25
188
4-21 Timeline of well operations and illustration of local and global timelapse attributes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-22 Time-lapse changes between repeated stacks during stage 12.
189
The
changes are due to noise as no well operations occurred between the
two stacks. The vertical black line identifies the location of the plug/
bottom perforation.
The dashed horizontal line represents the first
break time of the down-going P-wave.
. . . . . . . . . . . . . . . . .
189
4-23 Changes in the direct P-wave before and after: plug placement, and
perforation operation of stage 16. The vertical black line identifies the
location of the plug/ bottom perforation. The dashed horizontal line
represents the first break time of the down-going P-wave.
. . . . . .
190
4-24 Local time-lapse attributes for stage 16. The vertical black line identifies the channel at which the plug/ bottom perforation is placed for
stage 16. The dashed horizontal line represents the first break time of
the down-going P-wave.
. . . . . . . . . . . . . . . . . . . . . . . . .
191
4-25 Changes in traces at channels above and below the plug of stage 16:
before and after stimulation. . . . . . . . . . . . . . . . . . . . . . . .
4-26 Summary of the local time-lapse attributes for all the stages.
192
The
black asterisk in the figures represent the bottom perforation location
for that stage. In figure (b), the red vertical line denotes the location
of the bottom perforation.
. . . . . . . . . . . . . . . . . . . . . . . .
193
4-27 Summary of the global time-lapse attributes for all the stages. The
black asterisk in the figures represent the bottom perforation location
for that stage while the red represents the same for the previous stage. 194
4-29 Stimulated volume modeled as a low velocity layer sandwiched between
background layers.
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
195
. .
196
4-30 Extent of the amplified zone and the amplification in each stage.
26
List of Tables
4.1
Effect of Measurement system factors on time-lapse changes
. . . . .
164
4.2
Summary of conclusions from models for formation changes . . . . . .
173
27
28
Chapter 1
Introduction
1.1
Overview
In this thesis, I focus on developing techniques to characterize fractures, both natural and hydraulic, from borehole seismic measurements. Fractures are macroscopic
planar discontinuities in the subsurface that are caused by stresses that exceed the
rupture strength of the rock or by physical diagenesis (Nelson, 2001). Fracture networks play a dominant role in governing the fluid-flow in the subsurface over reservoir
scales, especially in low permeability formations such as carbonates, shales, coalbed
methane and tight sandstones.
Naturally fractured reservoirs are present all over
the world, in all types of formations and contribute significantly to hydrocarbon production. Carbonate reservoirs alone, which are characterized by extensive fracture
networks, constitute about 60% of the world's oil and 40% of world's gas reserves. The
hydrocarbon storage and permeability structure of naturally fractured reservoirs are
markedly different from reservoirs governed by matrix permeability and the knowledge of fracture density, orientation, spacing and morphology is important for optimal
development and production of these resources (Aguilera, 1995; Nelson, 2001). On
the other hand, unconventional resources like shales, coalbed methane and tight-gas
29
sandstones have very low matrix permeability (microdarcy to nanodarcy) and are
hydraulically fractured for economic recovery of hydrocarbons. Advances in horizontal drilling and hydraulic fracturing not only made these resources viable but also
competitive.
As a result of the recent shale gas revolution, the United States has
transitioned from being a net importer of gas (1.5 trillion cubic feet, Tcf, in 2012)
to net exporter of gas by 2018 and estimates are that exports will be as large as
5.8 Tcf in 2040 (EIA, 2014). Increased development of tight oil resources in Eagle
Ford, Bakken and Permian basin formations is leading to increased U.S. crude production that started from 2012 and is expected to continue to increase to a peak
production of 9.6 million barrels per day by 2019 (EIA, 2014). On the global scale,
shale gas contributes to 32% (22,882 Tcf) of the total estimated natural gas resources
and Shale/tight oil contributes to 10% (3357 billion barrels) of the global crude oil
reserves (Kuuskraa et al., 2013).
However, the recovery factor for tight oil is less
than 5% and for shale gas, on an average, is only about 20%. Tapping these huge
reserves definitely needs improved technology. Monitoring is crucial to enhance our
understanding of hydraulic fracturing and provides critical feedback for improving
the hydraulic stimulation design.
Fractures range in scale from as small as micro-cracks at centimeter scale to joints
on the order of meters to faults on the scale of 10's of meters to kilometers. Similarly,
the techniques to characterize fractures vary based on the scale of observation. On
a reservoir scale surface seismic techniques are used; on an intermediate scale Vertical Seismic Profiling (VSP) and cross-well studies are made; and for near borehole
studies well logs are used (Long et al., 1996). Televiewer and Formation micro scanner are the common well logs for identifying and determining the orientation of the
fractures intersecting the borehole (Long et al., 1996; Zoback, 2010). However, they
do not provide information about the extent of the fracture away from the borehole
or a reliable estimate of the fluid transmissivity of the fracture, which is the prime
30
motivation for fracture characterization.
Sometimes packer tests are performed in
isolated intervals to determine the transmissivity in that section of the well. These
tests are time consuming and are not regularly used.
The signature of fractures in the seismic wave field depends on the size of the
fractures compared to the wavelength of the incident wave field. When the fractures
or cracks are much smaller than the seismic wavelength, the wave field responds to the
effective medium properties of the formation with cracks. Various authors (Kuster
& Toksdz, 1974; O'Connell & Budiansky, 1974; Hudson, 1981, 1991; Liu et al., 2000;
Kachanov, 1992) related the crack density of penny shaped cracks to the elastic
properties of the effective medium and thus the propagation velocity of elastic waves.
When the micro-cracks are preferentially oriented, the effective medium properties
are anisotropic (Hudson, 1981; Schoenberg & Douma, 1988; Schoenberg & Sayers,
1995).
It is common in nature to find preferred orientation of cracks comprising a
fracture set (Long et al., 1996). In addition, given the stress state, fractures oriented
perpendicular to the minimum principal stress direction are more likely to be open
and more active (Boness & Zoback, 2006). Various surface seismic studies have used
Amplitude Variation with Offset and Azimuth (Rfiger, 1998; Hall & Kendall, 2003;
Liu et al., 2010) to infer the anisotropy in the medium and thus the preferred crack
orientation and crack density. Other studies have relied on shear wave splitting (Majer
et al., 1988; Crampin & Lovell, 1991; Winterstein & Meadows, 1991; Gaiser et al.,
2001, 2002; Shen et al., 2002). However, preferred orientation and crack density are
not sufficient to estimate the permeability of the formation.
Moreover, the cracks
characterized by effective medium methods are small in size and do not contribute
significantly to the fluid flow.
Fractures that are comparable to the seismic wavelength (on the order of 10s of
meters) are large enough to be connected over reservoir scales and are major contributors to fluid flow. The seismic wave field is scattered from such large discrete
31
fracture networks. Based on the observations from various numerical studies, several scattering based methods (Willis et al., 2006; Burns et al., 2007; Grandi, 2008;
X. Fang, Fehler, et al., 2013; Zheng et al., 2013) have been proposed to estimate the
preferred orientation of the fracture network, fracture dimension and spacing. Several
studies show that the scattering amplitude from fractures is proportional to fracture
compliance (Blum et al., 2011; X. Fang, Shang, & Fehler, 2013).
Fractures are rough surfaces that are in contact with each other through asperities
(Brown & Scholz, 1985). The flow through a fracture is controlled by inter-linked microscopic features such as aperture distribution, tortuosity, roughness of the fracture
surface and the actual contact area (Walsh, 1981; Brown, 1987; Thompson & Brown,
1991; Zimmerman & Bodvarsson, 1996; Hakami & Larsson, 1996). The same microscopic details control the mechanical properties of the fracture and thus the fracture
compliance (Brown & Scholz, 1986; Tsang ,& Witherspoon, 1983; Renshaw, 1995;
Liu, 2005).
Laboratory experiments (Pyrak-Nolte, 1996; Pyrak-Nolte & Morris,
2000) showed that fracture compliance and transmissivity are positively correlated.
Thus, fracture compliance is a key link between seismic measurements and the fracture transmissivity (Brown & Fang, 2012). However, fracture compliances estimated
from ultrasonic experiments in the laboratory are too small to observe any scattering in the field. Worthington and Lubbe (2007) argue that fracture compliance may
scale with fracture size and thus reservoir scale fractures have observable scattering
effects. However, field measurements of fracture compliance are limited. I address
this in chapter 2 by developing models to estimate fracture compliance in the field.
I studied tubewave generation and attenuation at a fracture intersecting a borehole
to estimate the fracture compliance as well as the fracture size and aperture. These
models can be used to characterize both natural and man-made fractures that intersect a borehole. Using published field data, I show that fracture compliances of
fractures intersecting a shallow borehole have sufficient compliance to cause seismic
32
scattering in the frequency range used for seismic observations.
In chapter 4, I shift the focus on to monitoring hydraulic fracturing.
We are
interested in estimating the Stimulated Reservoir Volume (SRV) (Mayerhofer et al.,
2010) within which the permeability has been increased due to hydraulic fracturing.
The two popular methods for estimating SRV are monitoring microseismicity and
tilt-meter measurements on the surface after stimulation (Warpinski et al., 2004).
Tilt-meter measurements only provide the surface deformation due to stimulation.
Though useful they are not ideal to estimate the extent of stimulated volume. Numerous microseismic studies have been made to understand the hydraulic fracturing
process (Rutledge & Phillips, 2003; Warpinski, 2009; Maxwell, Rutledge, et al., 2010;
Warpinski et al., 2012). It is now well understood that the extent of the microseismic cloud is not necessarily confined to the newly stimulated volume (Maxwell et al.,
2009; Maxwell, Underhill, et al., 2010). Pore pressures communicating over large distances and poroelasticity may cause seismic activity at pre-existing faults (Warpinski
et al., 2004). Alternatively, the stimulated volume is probed using active source methods and studying shear wave shadowing, shear wave splitting and P-wave amplitude
changes in the stimulated zone (Stewart et al., 1981; Turpening & Blackway, 1984;
Wills et al., 1992; Meadows & Winterstein, 1994; Baird et al., 2013). Until recently,
both active source methods and passive microseismic monitoring required a neighboring monitoring well to house the seismic sensors. With the advent of Distributed
Acoustic Sensing (DAS) we can make seismic measurements in the same well that is
treated. This is a game changer for monitoring efforts. I devote chapter 3 to studying
DAS system for VSP measurements and quantifying the effect of various factors on
time-lapse DAS measurements.
In chapter 4, time-lapse DAS VSP data collected
during a multi-stage hydrofracturing operation were analyzed.
33
1.2
Thesis Outline and Contributions
The major contributions of this thesis can be summarized as below.
* Two methods are developed to estimate fracture compliance, fracture aperture
and fracture size in-situ by using tubewaves in a borehole. These methods are
applied to field data to show that fractures in the field have large compliance
values and that fracture compliance scales with fracture size. This has broad
implications for using seismic scattering-based methods to characterize fractures
on a reservoir scale.
.. Significant progress is made on the theoretical understanding of Distributed
Acoustic Sensing (DAS), a new seismic acquisition system and its relation to
geophone measurements. The effect of various factors in a borehole environment on DAS measurements is analytically studied. This study provides solid
foundation for use of DAS for reservoir monitoring.
* Time-lapse DAS VSP data collected during a multi-stage hydrofracturing operation are analyzed. Challenges in interpreting and processing this novel data
are addressed.
DAS is shown to be a reliable tool for monitoring hydraulic
fracturing provided acquisition geometry is chosen carefully.
This thesis is organized into five chapters. Chapter 1 discusses the context of
the thesis and prepares ground for the subsequent chapters. In chapter 2, we study
borehole tubewaves for fracture characterization and discuss the question of scaling
of fracture compliance. In chapter 3, we study Distributed Acoustic Sensing (DAS),
a novel seismic acquisition technique which has huge implications for in-well timelapse measurements and fracture characterization.
Chapter 4 is a field-study of a
multi-stage hydraulic fracturing job in a tight-gas sandstone reservoir using DAS in a
treatment well. Chapter 5 summarizes the contributions by the thesis and discusses
34
specific problems for future study. Chapters 2, 3, and 4 are stand alone chapters and
the reader may skip to the chapter of interest.
In chapter 2, we study tubewaves in a borehole and use them to characterize the
fractures that intersect a borehole. We describe two models, one for tubewave generation and the other for tubewave attenuation at a fracture intersecting a borehole,
that can be used to estimate fracture compliance, as well as, fracture aperture and
lateral extent. In the tubewave generation model, we consider tubewave excitation in
the borehole when a P-wave is incident on the fracture. The amplitude ratio of the
pressure due to the tubewave to that of the incident P-wave is a function of fracture
compliance, aperture, and length. Similarly, the attenuation of a tubewave in the
borehole as it crosses a fracture intersecting the borehole is also a function of fracture
properties. Numerically solving the dispersion relation in the fracture, we study tubewave generation and the attenuation coefficient at arbitrary frequencies. We observe
that measuring amplitude ratios or attenuation near a transition frequency can help
constrain the fracture properties. The transition frequency corresponds to the regime
where the viscous skin depth in the fracture is comparable to its aperture. Measurements in the high frequency limit can place a lower bound on fracture compliance and
lateral extent. We evaluate the applicability of the tubewave generation model to a
previously published VSP dataset and find that compliance values of the order 10-10
to 10-
m/Pa are likely in the field. These observations support scaling of fracture
compliance with fracture size and applicability of fracture scattering based techniques
to characterize fractured reservoirs.
In chapter 3, we change gears and study Distributed Acoustic Sensing (DAS), a
Fiber Optic (FO) cable based seismic acquisition technology which is gaining importance for Vertical Seismic Profiling (VSP) surveys, especially for time-lapse monitoring of reservoirs. DAS is a nascent technology and the current chapter contributes
towards the development of DAS for VSP. We first describe the technique in detail
35
for readers not acquainted with DAS. We show that DAS measurements are identical
to differential geophone measurements and compare the advantages and limitations
between DAS and geophones. We systematically study various factors that influence
DAS measurements including: gauge-length, strain in the cable and the background
temperature. We then present the borehole effects on DAS measurements for the cases
when the DAS cable is installed in the borehole fluid and when the cable is cemented
outside the casing. We followed the approach by Peng et al. (1993, 1994) to study P
and S plane-wave incidence on a borehole in both hard and soft formations, and show
the relation between the incident wave-field to DAS measurements. We show that the
sensitivity of DAS is markedly different based on how it is installed. We argue that
borehole effects are not important for frequencies below 300 Hz and are important for
frequencies above 500 Hz. We also studied the effect of cable design and formation
coupling on DAS measurements and show that cable design is important when DAS
is coupled through borehole fluid and not so important when cemented outside the
casing. Finally, we study the effect of temperature, pressure and cement properties
on time-lapse measurements and show that they do not contribute significantly. This
makes DAS a reliable tool for time-lapse monitoring.
In chapter 4, we describe a novel active-source seismic experiment with DAS in a
treatment well and study time-lapse changes due to hydraulic fracturing. The advent
of Distributed Acoustic Sensing (DAS) has allowed us to monitor changes from within
the treatment well itself. DAS offers distinct advantages over geophones but it also
poses unique challenges, including receiver depth uncertainty and low signal-to-noise
ratio. We describe the pre-processing needed before further time-lapse analysis of the
VSP. We focus on two key steps - depth calibration and noise removal. Large spike
noise, most likely from the DAS acquisition system, appears to be a major source of
noise in the raw DAS data, but can be removed with careful processing. Other sources
of noise include temperature fluctuations in the well and optical noise. We show that
36
excellent quality DAS VSP data can be obtained in a hydrofrac treatment well. We
observe systematic time-lapse changes in the amplitudes of direct P-waves: increased
amplitudes above the lowest perforation for each stage and decreased amplitudes
below.
These strong time-lapse changes appear to be long-lived, at least over a
period of 10 days. The time-lapse phase changes are small and hard to interpret.
We show that these time-lapse changes are not related to temperature and pressure
fluctuations between the time-lapse surveys.
We believe that the amplification in
the stimulated zone is related to formation changes and the attenuation is probably
related to coupling changes between the FO cable and cement. Though the acquisition
geometry of the field experiment was not ideal, DAS is promising for hydraulic fracture
monitoring.
37
38
Chapter 2
Fracture Compliance Estimation
using Borehole Tubewaves
2.1
Introduction
Naturally occurring fracture networks account for significant fluid flow in many petroleum
reservoirs, especially in carbonate reservoirs and other less porous formations. Fracture networks also play an important role in the economic recovery of geothermal
energy and for C02 sequestration.
To model flow in fractured reservoirs, we need
to know fracture network properties such as the dominant orientation of the fractures, fracture spacing, and fracture fluid transmissivity.
Direct measurement of
some fracture properties is possible in boreholes. Borehole televiewer and formation
micro-imager (FMI) logs are the most popular tools for characterizing fractures that
intersect boreholes. These logs provide the orientation and spacing of those fractures
intersecting the borehole. However, from these data, it is hard to differentiate between fractures with high or low fluid transmissivity and it is not possible to estimate
the lateral extent of the fractures.
Some of the fracture like features seen in the
logs could be drilling induced and thus not extend far from the borehole. Pressure
39
transient tests can give an estimate of fluid transmissivity of fractures, but these are
macroscopic measurements averaging over a large conducting region.
On a reservoir scale, seismic methods are at the forefront for detecting and analyzing fractures networks. The scale of a fracture relative to the seismic wavelength
determines the nature of the fracture signature in the wavefield (X. Fang, Fehler, et
al., 2013). Microfractures or cracks that are much smaller than the seismic wavelength
are known to cause velocity anisotropy. Considerable research has been done to characterize microfractures through effective medium theories (e.g., Peacock & Hudson,
1990; Kachanov, 1992). It is common to apply methods like amplitude variation with
offset and azimuth (AVOA) to characterize the velocity anisotropy that can be interpreted to characterize the preferred orientation of the fractures. It is not possible to
independently estimate the fracture spacing and fracture transmissivity using AVOA
analysis. The focus now is increasingly on detecting large discrete fractures that have
a larger impact on fluid flow. These macrofractures have lateral extent comparable
to the wavelength of the incident wavefield (tens of meters) and the spacing between
these fractures or fracture zones may be on the order of a wavelength. Such fractures
can scatter the seismic wavefield (Willis et al., 2006; Burns et al., 2007). They are
treated as distinct features rather than as an effective medium. Descriptive distributions of such networks are usually referred to as discrete fracture networks and can
be used to stochastically model fluid flow in reservoirs. Willis et al. (2006), Burns et
al. (2007), Grandi (2008) and X. Fang, Fehler, et al. (2013) develop scattering-based
methods to determine fracture orientation and spacing from seismic reflection data.
Scattered wave signals are a function of fracture compliance. Grandi (2008) numerically simulates scattering from a parallel set of discrete fractures and shows that the
amplitude of the scattered wavefield increases with increasing fracture compliance.
40
2.1.1
Fracture Compliance
Fracture compliance is the inverse of fracture specific stiffness (Pyrak-Nolte et al.,
1990) and is defined as the displacement across the fracture surfaces when a unit
stress is applied across the fracture. Laboratory studies suggest that fracture compliance and fracture fluid transmissivity are influenced by the same microscopic features
of the fracture, i.e., aperture distribution, actual contact area, fractal dimension of
the fracture surfaces and that these are inter-related (Pyrak-Nolte & Morris, 2000).
Therefore fracture compliance may be a key link to estimate fracture fluid transmissivity from scattered energy (Brown & Fang, 2012). Measuring the fracture compliance
in a borehole, we may be able to assign fracture compliance and thus, fracture transmissivity, to regions away from borehole based on relative scattered energy measured
on surface seismic data. In addition, estimating fracture compliance in a borehole
may be useful for monitoring the efficiency of hydraulic fracturing. Therefore it is
important to understand the range of compliance values that can be expected in the
subsurface.
Estimates of fracture compliance vary over orders of magnitude from laboratory
to the field. Worthington and Lubbe (2007) suggest that fracture compliance scales
with fracture size, which would explain the small compliance value measured in the
lab and the scattering effects seen at field seismic wavelength scales (Pyrak-Nolte et
al., 1990; Lubbe, 2005). However, compliance measurements in the field are limited
and are mostly based on effective medium methods by assuming some fracture density. In this chapter, we develop models that estimate fracture compliance, aperture,
and size in the field by studying 1) tube-wave generation and 2) tube-wave attenuation at a fracture intersecting a borehole. When an external wavefield is incident
on a fluid-filled fracture intersecting a borehole (e.g., VSP), it squeezes the fracture
and expels fluid into the borehole, generating a tubewave in the borehole. The amplitude of the tube-wave is proportional to the amount of fluid exchanged between
41
the fracture and the borehole. The fluid exchange, in turn, depends on the compliance and fluid transmissivity of the fracture. The amplitude ratio of the pressure
due to the incident wavefield measured in the borehole fluid to the pressure due to
the tube-wave generated at the fracture can be diagnostic of fracture compliance and
fracture transmissivity. Similarly, when a borehole tube-wave that is generated elsewhere propagates across a fracture, part of its energy is spent in pushing the fluid into
the conducting fracture. This energy loss depends on the amount of fluid exchanged,
and the attenuation coefficient is a function of the fracture properties.
Tubewave generation at a fracture was first studied by Beydoun et al. (1985).
However, Beydoun does not consider fracture compliance.
Later, Hardin, Cheng,
Paillet, and Mendelson (1987) formulate fracture closure as a function of fracture
compliance.
Beydoun and Hardin assume Darcy flow in the fracture, which is a
low-frequency approximation to the dispersion relation in the fracture (Tang, 1990).
Cicerone and Toks6z (1995) and Ionov (2007) study tube-wave generation by taking
the high-frequency approximation solution to the dispersion relation in the fracture.
Though Ionov (2007) does not consider fracture compliance, Cicerone and Toks6z
(1995) attempt to include fracture compliance indirectly by allowing displacement to
be discontinuous at the fracture top and bottom surfaces.
Attenuation of tubewaves across a fracture was studied by Mathieu (1984), Hornby
et al. (1989), Tang and Cheng (1993),Kostek, Johnson, and Randall (1998),Kostek,
Johnson, Winkler, and Hornby (1998)and Mathieu (1984) assumed Darcy flow in
the fracture and studied attenuation of tubewaves across the fracture. However, the
assumption of Darcy flow is not valid for typical logging frequencies.
Hornby et
al. (1989) and Tang and Cheng (1993) solved the problem under a high-frequency
approximation, which is a valid assumption for acoustic logging (kHz range of frequencies) and fractures like those expected in-situ. Later, Kostek, Johnson, Winkler,
and Hornby (1998) extend the theory to include the elasticity of the formation. These
42
studies did not account for the fracture compliance that plays an important role in
the tubewave attenuation.
In this chapter, we develop models for tube-wave generation and attenuation that
account for fracture compliance and are valid over a broad range of frequencies (Hz
to kHz).
To study tube-wave generation and attenuation at arbitrary frequency,
we numerically solve for the dispersion relation in the fracture. We first describe the
models for an infinitely long fracture to understand the affects of fracture aperture and
fracture compliance. The models predict a low-frequency regime, a high-frequency
regime and a transition regime in which the viscous skin depth is comparable to the
fracture aperture. Based on these observations, we show that measurements in the
transition regime are required to infer fracture aperture and compliance. However,
we discuss how data collected in the high frequency regime can be used to place a
lower bound on fracture compliance. We then extend the models to the finite fracture
case and discuss the effect of the finite length of fracture. Finite fracture models are
described in the Appendices A.1 and A.2. Finally, we present a field data example to
argue that fracture compliance of the order of 10-' m/Pa are feasible in the field.
2.2
2.2.1
Theorertical Formulation
Tube-wave generation in a borehole
Following previous studies, we consider a horizontal fracture that is infinite in lateral
extent and intersecting a vertical borehole of radius R as shown in Figure 2-1. The
model is developed to study the tubewave generation in the borehole when a plane
P-wave is normally incident on the fracture. However, the results can be extended
to an arbitrary angle of incidence.
Fractures are discontinuities in the subsurface,
held open by asperities that resist the fracture closure.
For simplicity, we assume
the fracture to be a parallel plate with static aperture Lo and normal compliance,
43
Z. For now, we neglect the effect of roughness, tortuosity and actual contact area of
the fracture on the fluid motion in the fracture; however these will be discussed in
a later section. Fracture closure is proportional to the compliance and the applied
effective normal stress. Though fracture closure and applied stress are non-linearly
related (Pyrak-Nolte et al., 1990), fracture closure due to the perturbation in the
applied stress over a background litho-static stress due to an incident wavefield can
be considered locally linear (Schoenberg, 1980).
Therefore, the dynamic fracture
aperture L(t) at any location can be written as (Hardin et al., 1987)
L(t)
=
Lo + Z [p(t) - on(t)] ,
(2.1)
where LO is the static aperture, on(t) is the normal stress on the fracture face, and
p(t) is the perturbation in the fracture fluid pressure due to closure.
For a normally incident P-wave, Un(t) = coe-w, where o0 ,w are the stress amplitude and frequency of the incident wave. The incident wave perturbs the fracture
aperture and causes a pressure gradient in the fracture. For simplicity, fluid pressure
and flow in the fracture are averaged over the aperture and only their radial variation
away from the borehole is considered. We use cylindrical coordinates to accommodate
the axial symmetry of the problem. The net flow out of a volume element 27rrL(t)dr
between r and r + dr from the axis of the borehole, during a time increment dt, should
equal the change in volume of the element due to the perturbation in the aperture
and the change in the fluid volume due to compressibility of the fluid. Thus, we arrive
at the mass conservation equation in the fracture as
(q+ -) =
o(
r
-L + L7--,
d
(2.2)
at'
where -/ is the fluid compressibility and q is the radial flow per unit length away from
the borehole. Flow in the fracture can be related to the pressure gradient through
44
dynamic conductivity, C. Solving for the flow field of a viscous fluid in an infinitely
long rigid fracture, Tang (1990) showed that the flow averaged over the aperture at
any location could be related to the radial pressure gradient at that location as
-
1=-U
_ O iwLo a
a_
=-
Or
i
o
k2ajpf Or'
(2.3)
where cf is the acoustic velocity in the fluid, pf is the fluid density and i is the
imaginary unit. A bar over a symbol denotes that the quantity is in the frequency
domain.
The radial wavenumber of those specific modes that can exist in a rigid
fracture (zero fracture compliance) is represented by kr and is obtained by solving
the dispersion relation for the velocity field in an infinitely long, fluid filled fracture,
given by (Tang, 1990)
k tan (2o
S2+k
+
1?2
(
=2 1-
0,
iwv ,P
44.
f3
72+ kr =
=
(2.4a)
(2.4b)
,(2.4c)
where v is the kinematic viscosity of the fluid.
Given the small strains associated
with exploration seismic waves, and for the range of the fracture apertures and the
fracture compliances that are practical, fracture closure is small compared to the
fracture aperture.
So, we approximate the modes in the fracture with that of a
rigid fracture given by Tangs (1990) dispersion relationship.
The effect of fracture
compliance is taken into account in equation 2.2. Thus, inserting equation 2.3 for
radial flow and equation 2.1 for the dynamic aperture into the mass conservation
equation 2.2 and neglecting higher order terms, we can write the frequency domain
differential equation for fluid pressure in the fracture as
45
,Pf
-r + r-r ar + ( 2p
Or2
(2.5)
where (
=
kaf
/
aeff, 1
/
2
=
1
/
'
LO
+ p1 Z / LO, ( is the wave number for the
2)
pressure field in a compliant fracture, and aeff is the effective propagation velocity of
the pressure field at the high frequency limit. As r
-+
oo, flow in the radial direction
tends to zero and we require that Op/r = 0. At the borehole wall, we require that
the fluid pressure in the fracture, P(w) 1,=R be equal to the fluid pressure due to the
tubewave generated in the borehole pt(w).
The homogenous solutions to equation
2.5 are Hankel functions of the first and second kind taking complex arguments.
However, the Hankel function of the second kind diverges as r
-+
oo, while the first
kind approaches zero. Taking Hankel functions of the first kind and satisfying the
boundary condition at the borehole, the pressure in the fracture can be written as
(wr) = [,(w) -
o1 Ho((r) +
HJ R)
H(C
LO
LO
-0,)
(2.6)
where, H, is the Hankel function of the nth kind and order m.
The pressure in the fracture, given by equation 2.6 satisfies the wave equation
when
and k' are real and it follows a diffusion equation when C 2 and k2 are
(2
imaginary.
Tang (1990) solves the dispersion relation at high- and low-frequency
limits and shows that k2 is real at the high frequency limit and is imaginary at
the low frequency limit. At the high frequency limit, the fracture aperture is much
greater than the viscous skin depth, 6 = V2v
/
w, and the inertial forces dominate.
At the low frequency limit, the fracture aperture is much smaller than the viscous
skin depth and the viscous forces dominate.
For v =
10-6
m 2 /s (value typical for
water) and for the range of natural fracture apertures (0.1-1 mm), 6 / Lo varies from
0.07 to 1.78 over the typical VSP frequency band of 10-60 Hz. Hence, either the
high- (6
/
LO < 1) or low-frequency (6
/
Lo
46
> 1) approximation is not valid. In
this transition zone, k' is complex and the pressure field has both propagative and
dispersive components.
To address this, for an arbitrary frequency, we solved the
dispersion relation, equation 2.4, numerically for k2. The dispersion relation is nonlinear and has an infinite number of solutions corresponding to higher modes. Because
the contribution to flow from the higher modes is negligible, we use the fundamental
mode solution for k . Taking the numerical solution for k , equation 2.6 encapsulates
both diffusion and wave propagation. Because ( is complex, the propagation velocity
of the pressure -field is given by w
Im
/ Re {(} and the attenuation factor is given by
{(}. The dispersion relation for the propagation velocity for different fracture
compliance values and apertures is shown in Figure 2-2. The propagation velocity
approaches zero towards low frequencies, as the pressure field is more diffusive. At the
high frequency limit, the propagation velocity approaches a,,ff and for a rigid fracture,
the propagation velocity approaches the speed of sound in the fluid. Note that the
propagation velocity decreases with increasing compliance and decreasing aperture.
This is analogous to a pressure pulse propagating in an elastic tube. The speed of
the pulse decreases, as the tube is more elastic. Figure 2-3 shows the attenuation
factor as a function of frequency. As expected, higher frequencies attenuate more. As
aperture decreases, viscous forces dominate and attenuation increases. As compliance
increases, the propagation velocity decreases and the pressure pulse attenuates more
in the same travel distance.
We now proceed to estimate the amplitude of tubewave generated in the borehole. Knowing the distribution of pressure in the fracture from the equation 2.6, the
pressure gradient at the borehole wall and thus the flow into the borehole can be
estimated from equation 2.3. The rate of volume injection into the borehole, dV/dt,
is equal to the volume of fluid flowing from the fracture into the borehole per unit
time and is given by
47
dV
dV
dt
= -2rRq|r=R.
(2.7)
Because q denotes fluid flowing away from the origin, the negative sign is needed
for fluid flow into the borehole. This fluid exchange between the fracture and the
borehole acts as a volume source and generates a tubewave of amplitude pt given by
(Lee & Balch, 1982)
pfct dV
Pt = 27rR2dt,
where ct = af
/
1+ pfca
/
(2.8)
(p./ 2 ) (White, 1983), is the tubewave velocity in the
borehole and ps, 3 are the density and shear wave velocity of the formation, respectively. Tubewave velocity is very weakly dispersive over the frequency range of interest
(Hz to kHz) (Cheng & Toksbz, 1982) and thus, taking the low frequency approximation solution given by (White, 1983) does not affect subsequent analysis. Eliminating
the rate of fluid injection from equations 2.7 and 2.8 and using equations 2.3 and 2.6
we arrive at the expression for an equivalent pressure source for the tubewave in the
frequency domain as
kW
f-L-iH(CR)
/ iHJ (cR)
_
U
w
ct LO pf ae2ff
kraf aeff R LO / Z 1+
iH11((R) / iHO1((R)(29.
w
At the same time, the incident P-wave traveling along the borehole induces dynamic
pressure in the borehole given by (White, 1983)
~f)o
Mi =
ct
p,/32
1 - Ct2 / aZ2
(2.10)
By taking the pressure amplitude ratio Pt /Pi we eliminate 0'0. Figure 2-4 shows the
amplitude ratio plotted against frequency for a given fracture compliance and aper-
48
ture. For comparison, the amplitude ratios found using the low and high frequency
approximation solutions to the dispersion relation in the fracture are plotted as well.
At the low frequency limit, the amplitude ratio tends towards zero. With increasing
frequency the amplitude ratio increases and reaches a maximum at the transition
from low to high frequency regimes and then decreases with further increase in frequency.
However, at high frequency, the amplitude ratio reaches a constant value
roughly proportional to \/ZLo. Over the entire frequency range, the amplitude ratio
increases with fracture compliance (see Figure 2-5). It is easier to squeeze more fluid
into the borehole as the fracture is more compliant. However, the location of the peak
in the amplitude ratio is independent of the fracture compliance. The peak occurs
at the transition from the low to high frequency limit and depends on the fracture
aperture and the viscosity of the fluid. For larger apertures the peak occurs at lower
frequencies (see Figure 2-6), and for higher viscosities, the peak occurs at higher frequencies (see Figure 2-7).
Thus, the location of the peak can be indicative of the
fracture aperture, and the amplitude ratio can be indicative of fracture compliance.
Tubewave generation at a finite fracture
The amplitude ratio for a finite length fracture is derived in Appendix A.1. Figure
2-8 shows the amplitude ratio plotted for varying fracture lengths. The effect of the
finite length of a fracture is that the wave reflects at the fracture tip. As a result,
the amplitude ratio is amplified at those frequencies that interfere constructively and
attenuated at those frequencies that interfere destructively. This results in a series
of peaks and troughs overlaid on the infinite fracture response. Higher frequencies
attenuate more (see Figure 2-3) over the same fracture length, and as a result the
peaks/troughs reduce in amplitude with increasing frequency. As shown in Appendix
A.1, frequencies greater than
Wd
5.3(aeffLo
/
6(D - R)) are insensitive to the finite
extent of the fracture and the amplitude ratio matches with that of an infinitely long
49
fracture. Knowing fracture aperture, compliance, viscous skin-depth and observing
the frequency
Wd,
fracture length can be obtained. The spacing between consecutive
peaks or troughs in the amplitude ratio varies with frequency and is dependent on
the fracture compliance, fracture aperture, and the length of the fracture. However,
under the high frequency approximation, the spacing between consecutive peaks or
troughs A (in Hz) is constant and relates fracture length to aperture and compliance
through (see Appendix A.1): A
2.2.2
= &ef
/ 2(D
- R).
Tubewave attenuation in a borehole
We next consider tubewave attenuation across an infinitely long horizontal fracture
intersecting a borehole. Figure 2-9 shows a schematic diagram of tubewave attenuation. The geometry is the same as that described for tubewave generation in the
previous section. When a tubewave crosses a fracture intersecting the borehole, part
of its energy is spent in pushing the fluid into the fracture and part of the energy
is reflected at the interface.
As a result the transmitted wave is attenuated.
The
attenuation of the tubewave depends on the amount of fluid pushed into the fracture,
which in turn depends on the fracture transmissivity and compliance.
Considering
the continuity of the pressure field in the borehole at the fracture top (z = 0) and,
applying mass conservation in the borehole while accounting for the flow into the
fracture, Mathieu (1984) obtains the transmission coefficient as
=
1 + fLO Io(f R) pf'
('la
2 1 1 (fR) ZF
C2
2,
f =-1
Ci
(2. 11b)
f,
where f is the radial wavenumber of the tubewaves in the borehole; ZF is the fracture
acoustic impedance, defined as the ratio of average pressure to average fluid velocity
50
across the fracture at the borehole wall; and Im is the modified Bessel function of
the first kind of order m. Because the wavelength of the tube wave is larger than the
borehole radius and the fracture aperture, the pressure in the borehole is assumed to
be constant over the borehole radius and over the fracture aperture. Mathieu (1984)
obtained ZF by assuming Darcy flow in the fracture, a low frequency approximation,
and did not consider the effect of the fracture compliance.
The dynamic aperture
of the compliant fracture, in our model, is given by equation 2.1. However, we -take
a-,(t) to be zero, because we do not have an external wave field that is incident on
the fracture in the tubewave attenuation model. The differential equation for the
pressure field in the fracture p is obtained by following the same steps as described
in the tubewave generation model and is given by
l (2p= 0,
(2.12)
&r 2
+P +
rr
with the boundary conditions: (1) At the borehole wall, the pressure in the fracture
should be equal to that of the transmitted tubewave; i.e., P(R) = Ptt(R). Here, we
assume that the pressure due to the transmitted wave in the borehole drives the flow
into the fracture. (2) Flow in the radial direction tends to zero at infinity, and we
require that Op-/&r = 0, as r -+ oc. Solving equation 2.12, the pressure in the fracture
can be written as
P(r) = Pt H
.
(2.13)
Knowing the distribution of pressure in the fracture from equation 2.13 and using
equation 2.3, the radial flow into the fracture is given by
iwL H|(CR)
4(R) = Ptt( k2p 0 H(R)
51
(2.14)
A
Thus, the impedance of the fracture can be written as
(2.15a)
ZF
<
_
TF(R) >
_(R
,
4(R) / Lo)
kla2p Hf11'((R)
=r
.
iwp HJ(CR)
(2.15b)
Inserting ZF from equations 2.15 into equation 2.11, the transmission coefficient
can be estimated. Taking (
=
kr = w / af, equation 2.15 matches the solutions given
by Hornby et al. (1989) and Tang and Cheng (1993) for a rigid fracture (Z = 0), at
the high frequency limit. The transmission coefficient, for an infinitely long fracture,
is plotted against frequency for a given compliance and aperture in Figure 2-10. For
comparison, the transmission coefficients under the low- and high-frequency approximations are plotted as well. At the low frequency limit, H1 ((R) / HJ ((R) approaches
zero and the transmission coefficient tends toward unity. In contrast, Hornby et al.
(1989) predicts that the transmission coefficient goes to zero toward low frequencies,
consistent with the high-frequency limit solution (see Figure 2-10).
However, his
solution did not account for viscosity, which dominates at lower frequencies.
The
transmission coefficient shows a transition from low to high frequency, similar to the
tubewave generation model. With increasing frequency, the transmission coefficient
decreases and reaches a minimum at the transition from low to high frequency and
then increases with further increase in frequency.
However, in the high frequency
regime, the transmission coefficient reaches a constant value. In general, as compliance increases, the transmission coefficient decreases over the entire frequency band
(see Figure 2-11). Thus, a compliant fracture can explain low transmission coefficients observed in the field without demanding excessively high apertures, which is
the case when fracture compliance is not considered (Hornby et al., 1989). For a given
compliance, the location of the frequency having the minimum in the transmission
coefficient depends on the viscosity of the fluid and the fracture aperture. Increasing
52
viscosity pushes the minimum towards higher frequencies and larger aperture moves
the minimum towards lower frequencies (see Figures 2-12 and 2-13). This dependence
of transition regime frequency on compliance, aperture, and viscosity is the same as
seen for tubewave generation from an incident P-wave in the previous sections.
Tubewave attenuation at a finite fracture
Fracture impedance for a finite length fracture is derived in Appendix A.2. Figure
2-14 shows transmission coefficients for a finite fracture case. The effect of the finite
length of the fracture is to cause peaks/troughs overlaid on the infinite fracture response, similar to the tubewave generation model. The decay of the peaks/troughs
and the spacing between consecutive peaks/troughs at high frequencies are suggestive
of the fracture length for the same reasons discussed in the tubewave generation section. We find that the expressions for the frequency,
Wd,
at which the finite fracture
response matches the infinite fracture response, and the spacing between consecutive peaks/troughs at high frequencies, A, are the same as that for the tubewave
generation model and are derived in Appendices A.1 and A.2.
2.2.3
Effect of dynamic tortuosity and permeability
Real fractures are rough surfaces in contact (Brown & Scholz, 1985) and are rarely
parallel plates, as idealized in the models discussed in this chapter.
In a fracture,
aperture is spatially varying and it is zero at the asperities, where both the fracture
surfaces are in contact. At a microscopic level, fractures are similar to porous media.
Johnson et al. (1987) described wave propagation in a porous medium in terms of
dynamic tortuosity Q and dynamic permeability K given by
Q= Q
+
wKo pf
53
F(w),
(2.16a)
K =
where
# is the porosity,
QWpf
,
(2.16b)
Q, is the real valued tortuosity at infinite frequency, and KO is
the real valued permeability at zero frequency, and F(w) is a complex-valued function
such that (1) the dynamic tortuosity reduces to Q, at infinite frequency and (2) the
dynamic permeability reduces to KO at zero frequency. At frequencies in between, the
dynamic tortuosity and dynamic permeability are complex. From equation 2.16 we
can see that dynamic tortuosity and dynamic permeability are related and either can
be used to describe wave propagation in porous media. The real part of the dynamic
tortuosity reduces the wave propagation velocity. At infinite frequency the propagation velocity is reduced to af
/
VKY
due to tortuosity (Johnson et al., 1987). The
imaginary part is related to attenuation and dispersion due to viscous losses. Viscous
losses are proportional to the solid-fluid contact area and it is assumed that parallel
plate flow accounts for most of the viscous losses. The parallel plate assumption is
well tested in the laboratory and is valid for rough fractures as long as the actual contact area at the asperities is less than 30% of the fracture surface area (Witherspoon
et al., 1980; Tsang, 1984). Actual contact area depends on the aperture distribution and normal stress. Laboratory measurements by Bandis et al. (1983) on several
granite and limestone samples showed that actual contact area is between 40% and
70% for normal stresses above 30 MPa. For fractures with large actual contact area,
the flow is more complicated (Zimmerman & Bodvarsson, 1996) and the flow rate
drops by orders of magnitude (Tsang, 1984). Such fractures may not be of practical
interest. Moreover, the stress at which the parallel plate assumption breaks down
depends on the aperture distribution and may scale up for large discrete fractures
that have broader distributions of apertures (Tsang & Witherspoon, 1983). For the
current discussion, we assume that the parallel plate law adequately represents the
viscous losses. Tang (1990) shows that under the low frequency approximation the
54
dynamic permeability estimated from his model approaches that from the parallel
plate law. Thus, the estimates of the pressure amplitude ratio or the transmission
coefficient, at the low frequency limit, are reliable for fractures with actual contact
area less than 30%. However, the dynamic tortuosity estimated from Tangs model
approaches one at high frequencies implying no tortuosity. To look at the effect of
dynamic tortuosity at the high frequency limit, we solve the dispersion relation in
the fracture by taking the velocity of wave propagation in the fracture fluid to be
af / VTfZ. As w -+ oo, k,. is given by V/MZ(w / af) and HI ((R) / HOd((R) approaches
-i. Thus, taking the high frequency approximation, the amplitude of the generated
tubewave, equation 2.9 and the fracture impedance, equation 2.15, can be written as
Pt
=f ,
(2.17a)
_O
1
ZF =Pf
(2.17b)
1
af
LO
Johnson et al. (1987) showed that the values of Q,
range from 1 for a parallel
plate to 3 for a typical porous medium; therefore, the value for fractures should lie
between 1 and 3. When (pfZ / Lo)
>> (Rc / a2), the effect of tortuosity is negligible
on the amplitude ratios and transmission coefficients.
values greater than 10~" m/Pa. When (pfZ / Lo)
This is true for compliance
<(Qm /
and fracture impedance are reduced by a factor of 1
/
/
2i),
the amplitude ratio
In a porous medium, the
transition from low to high frequency depends on the viscous skin depth relative to
the pore size (Johnson et al., 1987). For fractures, the mean fracture aperture LO is
a good estimate of the pore size and thus, the transition frequency is captured well
by comparing the viscous skin depth to the parallel plate fracture aperture.
55
2.3
2.3.1
Field Data Analysis
Overview
The magnitude of the amplitude ratio of the generated tube wave to that of the incident P-wave can be easily determined from the power spectra of the VSP data and
can be used to invert for fracture properties (Hardin et al., 1987). The waveforms
corresponding to the incident wave and the generated tubewave are separated in time
on the traces recorded in the borehole as you move away from the fracture. At a
receiver far enough from the fracture such that the two waveforms are separated in
time, the waveforms are windowed and their amplitude spectra are calculated. The
ratio as a function of frequency is measured by taking the ratio of the amplitude spectra at each frequency. We can set up an inverse problem to estimate the aperture and
compliance such that the observed amplitude ratio at all the frequencies matches with
the tubewave generation model. If the data span the transition regime, the location
of the maximum can be used to first estimate the fracture aperture. The maximum
occurs when the viscous skin depth is comparable to the fracture aperture. Viscous
skin depth at the frequency corresponding to the maximum in the amplitude ratio
is a good estimate of the fracture aperture. Knowing the fracture aperture, fracture
compliance can be estimated from the amplitude ratio at high frequencies.
Thus,
the inverse problem is well constrained when we have data spanning the transition
regime. If the amplitude ratio is measured only in the high-frequency regime, different combinations of compliance and aperture can satisfy the high-frequency limit
(the flat region of the curve in Figure 2-4) and data collected in this regime cannot independently constrain compliance and aperture. The inverse problem will be
ill-constrained if the data are collected only in the high frequency regime. However,
the behavior of the amplitude ratio as a function of compliance and aperture does
allow us to place a bound on the fracture compliance value. We varied the aperture
56
values from 0.1 mm to 1 mm and compliance from 104 m/Pa to 10-
5
m/Pa and
plotted contours for constant values of amplitude ratio at a given frequency as shown
in Figure 2-15. We can see that the amplitude ratio flattens after some aperture value
(when 6
< Lo) and is not greatly influenced by the aperture beyond this point. At
these large apertures, an observed amplitude ratio corresponds to a single compliance
value. However, at smaller apertures, the contours bend towards higher compliance
values. To retain the same amplitude ratio at smaller apertures, the fracture should
be more compliant. So,- every amplitude ratio corresponds to a minimum compliance,
over the range of apertures that are practical. Allowing a large aperture (probably
using the apparent aperture measured from FMI log), we can place a minimum bound
on the compliance. Of course, it would be best to collect data at frequencies spanning the transition regime to better constrain all fracture parameters. For practical
purposes, the transition regime lies between 1 and 30 Hz for water (v
-
10-6 m 2 /s,
and an aperture range of 0.1 mm to 1 mm) and it increases to 300 Hz for crude oil
(V
=
10-5 m 2 /s, and an aperture range of 0.1 mm to 1 mm).
Crude oil is more
viscous. So the transition regime shifts to higher frequencies.
Amplitude ratios from real data may have multiple peaks/troughs due to the
finite extent of the fractures.
However, since we showed that these peaks/troughs
are superimposed on the infinite fracture response, we can take a moving average of
the amplitude ratio data and analyze it using an infinite fracture model to obtain
fracture aperture and compliance.
Knowing fracture aperture and compliance, we
can simulate the amplitude ratio for the infinite fracture case and compare it with
the unsmoothed data. If the peaks and troughs can be resolved in the data, we can
measure the spacing between consecutive peaks/troughs, A, to estimate the fracture
length based on equation A.6. Also, we can locate the frequency,
wd,
at which the
amplitudes of these peaks/troughs decay to the infinite fracture response to estimate
fracture length by using equation A.7.
When the data are collected in the high
57
frequency regime, we can only place a lower bound on the fracture compliance and
then, equations A.6 or A.7 can only be used to obtain a lower bound on fracture
length. However, we observe that a fracture that is tens of meters long appears to
be an infinite fracture for tubewave generation or attenuation, and, thus, we may not
be able to characterize the length of hydraulic fractures by analyzing the modes that
travel through the fracture fluid.
The discussion above is equally valid for obtaining fracture parameters from tubewave attenuation data. Typical well-log data are generally in the kHz-frequency range
and perhaps as low as 500 Hz. Thus, well-log data are in the high frequency regime
and we will not be able to independently measure fracture aperture and compliance.
We may be able to analyze the attenuation of tubewaves that are excited in the borehole in a VSP setting. Alternatively, micro-seismic events accompanying hydraulic
fracturing are reported to have a dominant frequency band ranging from 200 Hz to
1kHz (Warpinski, 2009) and occasionally as low as 30 Hz (Fehler & Phillips, 1991).
Similarly, micro-seismic events generated during production are reported to have frequency band of 10-50 Hz (Kiselevitch et al., 1991). We propose that analyzing the
amplitude ratio of tubewaves generated at a fracture during micro-seismic events, and
measuring the attenuation of these tubewaves as they cross other fractures intersecting the borehole can be useful to characterize the fractures. This methodology may
also be applied to evaluate the performance of hydraulic fracturing procedures.
2.3.2
Field example
Hardin et al. (1987) report amplitude ratios from a field VSP experiment at a well
in Mirror Lake, New Hampshire. The Mirror Lake borehole was drilled to a depth of
about 225 m with a diameter of 0.15 m in a metamorphic sequence of schist and gneiss,
intruded by thick, irregular veins of quartz monzonite. Standard wireline logs, fullwave acoustic log (2-20 kHz) and hydrophone VSP (10-1000 Hz) data were collected.
58
The VSP data were bandpass filtered and the tubewave to P-wave amplitude ratio
was estimated over the frequency range 100-300 Hz.
The amplitude ratios, at a
frequency of 150 Hz (source band center frequency), corresponding to a fracture at
45 m depth, ranged from 10 to 15.
Comparing the observed amplitude ratio to
amplitude ratio contours (at 150 Hz) from a model with parameters appropriate for
the field study, the lower bound on compliance was found to lie between 3 x 10-10 and
10- m/Pa (see Figure 2-15). However, analyzing the same data, Hardin et al. (1987)
suggested that compliance values should be of the order of 10-12 to 10-13 m/Pa. While
relating radial flow to the pressure gradient in the fracture, Hardin used Darcy's law
applied to parallel plates. This corresponds to the low frequency approximation of
Tang's dynamic conductivity equation 2-3. Thus, Hardin applied a model valid for
the low-frequency regime to data from the high-frequency regime and thus under
estimates the fracture compliance. We also analyzed amplitude ratios corresponding
to a fracture at 290-m depth in water well at Hamilton, Massachusetts, drilled in
a gabbro-granodiorite formation (Hardin, 1986). We find that the lower bound on
compliance for this fracture is between 1010 and 10-
2.4
9
i/Pa.
Discussion
It should be noted that the tubewave generation model is developed for a normal
incidence wave on a fracture that intersects the borehole at a right angle, e.g., a
vertical borehole and horizontal fracture. However, with increasing depth fractures
are more inclined and tend to be sub vertical.
Moreover, the incident wavefield
may not be parallel to the borehole. When a wave is incident at an angle to the
borehole, the pressure amplitude of that wave measured in the borehole increases
compared to that of a wave propagating parallel to the borehole (White, 1983). At
the same time, non-normal incidence on a fracture reduces the normal stress on
59
the fracture and decreases the pressure amplitude of the generated tubewave in the
borehole. As a result, any deviation from the assumed geometry in the field would
mean reduced amplitude ratios and, therefore, fractures of a given compliance will
be harder to observe. In other words, an inclined fracture must be more compliant
than a horizontal fracture for the same amplitude ratio. Hence, the lower bound on
fracture compliance estimated by assuming a horizontally intersecting fracture and
normal incidence on the fracture still serves as a lower bound. In addition, the effect
of asperities and tortuosity on flow would be to reduce the pressure amplitude ratios.
So, the lower bound on fracture compliance from our model is conservative.
The estimate of lower bound on fracture compliance (on the order of 10-10 m/Pa)
for the meter-scale fractures in Mirror Lake experiment is orders of magnitudes larger
than the fracture compliance from laboratory measurements and supports the scaling
of fracture compliance with fracture length (Worthington, 2007). Higher compliance
values at larger scales are not surprising. Brown and Scholz (1985) analyze the natural
rock surfaces and found that the profiles are fractal and the spatial frequencies have
a red-noise power spectrum. Other authors (Hakami & Larsson, 1996) report that
apertures are normally distributed. This means that larger apertures are few and
spread out spatially at larger distances. When a wave is incident on a fracture, it
samples regions on the order of its wavelength.
Larger wavelengths sample larger
fracture surface and sample larger apertures. A few large apertures can drastically
&
increase the compliance and also increase fluid transmissivity. However, (Brown
Scholz, 1985) also suggest that fracture surfaces should be correlated after a certain
scale. In such a case, we will see an increase in compliance with scale until we reach the
correlation length. Although we predict high compliance values (of the order of 10-10
m/Pa), one should be careful when applying them to numerical modeling of wave
propagation using a linear-slip model (Schoenberg, 1980). A fluid filled fracture may
have compliance similar to a dry fracture under drained conditions, but it becomes
60
much stiffer due to the incompressibility of the fluid under undrained conditions. The
overall compliance could also be frequency dependent due to fluid motion, depending
on the drainage length compared to the wavelength.
2.5
Conclusions
Tubewave generation and attenuation at a fracture intersecting a borehole is modeled
accounting for the intrinsic fracture compliance. The pressure field in the fracture was
solved without any low/high approximations on frequency. Thus, amplitude ratios
and tubewave attenuation over a range of frequencies and fracture compliances were
analyzed.
The amplitude ratio/transmission coefficient has a maximum/minimum
at a transition frequency. The models suggest that measurements taken near the
transition frequency can constrain fracture compliance and aperture more effectively.
A finite-length fracture manifests peaks/troughs superimposed the infinite fracture
response. If we can resolve the spacing between consecutive peaks/troughs or the
decay of the peaks/troughs, we can estimate the fracture length knowing fracture
aperture and fracture compliance.
When we have only a minimum bound on the
fracture compliance, we can place a minimum bound on the fracture length. Comparing the tubewave generation model to previously published VSP data suggests
that fracture compliance values of the order of 10-10 m/Pa to 10- 9 m/Pa can be expected in the field. With these values, scattering of seismic waves from such fractured
regions should be observed using surface seismic data.
61
2.6
Figures
Borehole
Incident Wave Field
z =0
Tube
Wave
Flow into borehole
Z=
Fracture
LOR
213
r
dr
r
--
r= R
z
Figure 2-1: Diagram showing tube-wave generation at a fracture intersecting a borehole.
14
Rigid fracture
103
Z=1(- 3 rn/Pa
=10-
.102
=10
0
~1011 C
rn/Pa
rn/Pa
V
0
10 2
10
10
10
10
Frequency (Hz)
Figure 2-2: Propagation velocity for fluid pressure in the radial direction in a fracture,
w /Re{(}, is plotted against frequency for different values of compliance and aperture.
The solid lines represent varying compliance when fracture aperture is 0.5 mm. The
dotted lines represent varying fracture aperture when fracture compliance is 10-9
m/Pa. The propagation velocity is obtained by numerically solving Tang's dispersion
relation using: aOf=1500 m/s, a=5800 m/s, 3=3300 m/s, pf=1000 kg/m 3, p = 2700
kg/m 3 , v-10- 6m 2 /s.
The fluid properties correspond to water.
62
102
E
10
MIS
~0~
~
-6
-
-
%:X~A3
C
C
0
1 -2
10
1l-e
1-1
10
I 1P
10 0
10
Frequency (Hz)
102
Figure 2-3: Attenuation factor Im{} for fluid pressure in a fracture is plotted against
frequency for different values of compliance and aperture. The solid lines represent
varying compliance when fracture aperture is 0.5 mm. The dotted lines represent
varying fracture aperture when fracture compliance is 10- 9 m/Pa. The parameters
for this study are the same as in Figure 2-2.
25201
--
15
10
-
Solving dispersion relation
freq. approx.
Low freq. approx.
-- - -High
5
10
--
-
10
1
10
102
Frequency (Hz)
Figure 2-4: Tube to P-wave pressure amplitude ratio is plotted against frequency for
a 0.5-mm-wide fracture with a fracture compliance of 10- 9 m/Pa, intersecting a 15
cm diameter borehole. The formation and fluid properties are the same as in Figure
2-2.
63
15Z=10G9 mn/Pa
10 -Z=1W~
Z=1 (- 12 rn/Pa
5-
rWPa
z-io- 13 Mp011MP
0
10
10
10
10
10
Frequency (Hz)
Figure 2-5: Tube to P-wave pressure amplitude ratio plotted against frequency for
different fracture compliance values, taking LO = 0.5 mm, while other parameters are
kept constant. Note that the amplitude ratio decreases with decreasing compliance
and the transition regime is independent of compliance. The parameters for this
study are the same as in Figure 2-4.
mm
-
25
LO=0.75
20
=0.5
LO
-
L
0=1
30
15
LOO~lMM
LO=025 m
10
..............................
5
n
10
-1
10
1
10
10
-
102
Frequency (Hz)
Figure 2-6: Tube to P-wave pressure amplitude ratios are plotted against frequency
for different values of aperture, taking Z = 10- 9 m/Pa, while other parameters are
kept constant. Note that the transition regime moves towards higher frequencies
with decreasing aperture. Also, amplitude ratio decreases with decreasing aperture.
Medium parameters are the same as in Figure 2-4.
64
35
m2/s
v=10
30
25
--
20
-
- AO
15
jl
10
5
V= 10-5
1
O
1-10
02
2
10-2
2'/S
10
104
10
Frequency (Hz)
102
Figure 2-7: Tube to P-wave pressure amplitude ratios plotted against frequency for
different kinematic viscosity values, taking Z = 10- 9 m/Pa and LO = 0.5 mm, while
other parameters are kept constant. Note that the transition regime moves towards
higher frequencies with increasing viscosity. The parameters other than viscosity are
the same as in Figure 2-4.
30
25
20-
-C
7.
15
10
5
-2
10
-1
12
0
1
0
10
10
Frequency (Hz)
2
3
Figure 2-8: Tube to P-wave pressure amplitude ratio is plotted against frequency for
fractures of different fracture lengths, taking Z = 10-' m/Pa and Lo = 0.5 mm, while
other parameters are kept constant. All other parameters are the same as in Figure
2-4.
65
Borehole
Incident Tubewave
Reflected Tubewave
Flow into fractu re
Ln-h-
Trasmitted Tubewave
z= L
r
Fracture
dr
z4
r= R
2R
Figure 2-9: Schematic showing attenuation of tubewave at a fracture intersecting a
borehole.
1
-.
-
0.8
0.
-
Solving dispersion relation
-High freq. approx.
- Low freq. approx.
0.6
0.4.
n 2'
102
-
-
-
-7
-1
10
1
0
10
10
10
10
Frequency (Hz)
Figure 2-10: Transmission coefficient is plotted against frequency assuming a fracture
compliance of 10 9 Pa/m and an aperture of 0.5 mm. The parameters for this study
are the same as in Figure 2-4.
66
1
T.. r-n/Pa
Z=10~13M/P
0.9
Z=10-TI m/Pa
0.8
Z=1 -12 m/Pa-
-~
0.7
Z=1 O-9 mn/Pa
0.6
0.
1l-e
1
0
-1
10~
10
10
102
10
Frequency (Hz)
Figure 2-11: Transmission coefficient is plotted against frequency for different fracture
compliance values, taking Lo = 0.5 mm, while other parameters are kept constant.
Note that the transmission coefficient increases with decreasing compliance and the
transition regime is independent of compliance. The parameters for this study are
the same as in Figure 2-4.
1
L =0.1 mm
L 0=0.25 mn
0.8
L,=0.5 mm
0.
0.6
0.
0.4
L =0.75 mm
L0=1 mm
0.2
10-2
10
10
Frequency (Hz)
10
10
10P
Figure 2-12: Transmission coefficients are plotted against frequency for different values of aperture, taking Z = 10- m/Pa, while other parameters are kept constant.
Note that the transition regime moves towards higher frequencies with decreasing
aperture. Also, transmission coefficient increases with decreasing aperture. Medium
parameters are the same as in 2-4.
67
72
0.9
v=5x10- M2/s
0.8
C:
0.7
0.6
0.5
-V=10em2/s
-v=5x 10-7 m2/s
0.4
0.3
V1U7 M2/s
0.2
0.1
10
2
-1
10
0
10
106
Frequency (Hz)
102
10
Figure 2-13: Transmission coefficient is plotted against frequency for different kinematic viscosity values, taking Z = 10- rn/Pa and LO = 0.5 mm, while other parameters are kept constant. Note that the transition regime moves towards higher
frequencies with increasing viscosity. The parameters other than viscosity are the
same as in 2-4.
1
D=0.25m
D-0.5m
0.8
-~
D=1m
0.6
-
Infinitely long frac.
0.4
0.2
10 2
10
106
101
10
103
Frequency (Hz)
Figure 2-14: Transmission coefficient is plotted against frequency for fractures of
different sizes, taking Z = 10-1 m/Pa and Lo = 0.5 mm, while other parameters are
the same as in 2-4.
68
-5
-6
30
_-7
25 __________30
20__________2
-8
20
-15
9
-
-9
-10
-11
5--
-12
1
-13
-14
-15
0.2
0.4
0.6
Aperture (mm)
0.8
1
Figure 2-15: Amplitude ratio contours are plotted in the aperture, compliance parameter space for a frequency of 150 Hz. The parameters for the study are the same as
in Figure 2-2 and correspond to the field study at the Mirror Lake borehole (Hardin
et al., 1987) discussed in the field example section. Amplitude ratios estimated from
the field data lie between 10 and 15. This suggests that the lower bound on the compliance lies between 3 x 10-10 m/Pa and 10-i m/Pa (indicated by the black dotted
lines) when fracture aperture is assumed to be lower than 1 mm.
69
70
Chapter 3
Distributed Acoustic Sensing for
Vertical Seismic Profiling
3.1
Introduction
Distributed Acoustic Sensing (DAS) is a Fiber Optic (FO) cable-based technology for
making seismic measurements. FO cables were originally developed in the 1960s for
telecommunication and by the 1980s several techniques were developed to allow their
use as sensors (Giallorenzi et al., 1982). Optical fiber sensors are now routinely used
as temperature sensors (Distributed Temperature Sensing or DTS), acoustic sensors,
magnetic sensors, gyros and for intrusion detection (Grattan & Meggitt, 2000; Z. Fang
et al., 2012). Optical fiber sensors can be broadly classified as point sensors, discrete
sensors and distributed sensors. In a point sensor the fibre is attached to a sensor
and serves to transmit signal, while in a discrete sensor, fiber is modified at discrete
points to act as discrete sensors (e.g., Bragg gratings). In a distributed optical fiber
sensor, the fiber itself responds to the physical quantity to be sensed and acts as a
continuous sensor. In the case of DAS, the fiber responds to strain due to the incident
seismic wave. Even though FO cables have been used in the Oil and Gas industry
71
for temperature sensing, noise logging, and production monitoring, the application
of distributed fiber optic sensors for seismic measurements has just started to gain
momentum.
DAS has huge potential for seismic measurements, especially in the context of
Vertical Seismic Profiling (VSP). A common setting for VSP is one in which the
seismic sensors are within the boreholes and the sources are on the surface (Hardage,
1983). VSP is commonly used for seismic-to-well tie and also as a check-shot survey
for velocity model building.
It is well suited for imaging near the borehole at a
resolution better than a regular surface seismic survey. In a typical VSP the seismic
sensors are either hydrophones hung in the borehole, or geophones coupled to the
borehole wall or cemented outside the casing.
Because long geophone arrays are
expensive and difficult to deploy, DAS provides a promising substitute. Multiple field
trials conducted recently in onshore wells (Mestayer et al., 2011, 2012; D. Miller et
al., 2012; Mateeva, Lopez, et al., 2013) as well as offshore wells (Mateeva, Mestayer,
et al., 2013; Madsen et al., 2013) demonstrate that DAS is a usable technology for
VSP. In a DAS VSP the fiber optic cable acts as a series of receivers and is either
hung in the borehole, latched on to the tubing, or cemented behind casing to provide
better coupling to the formation.
DAS seismic acquisition has several advantages over acquisition with geophones
(Mateeva, Lopez, et al., 2013). The most important one is that, with a permanently
installed fiber, a DAS VSP is completely non-invasive and can be deployed in almost
any type of a well, including hydrofrac treatment wells. In contrast, geophone deployment is invasive and sometimes impossible (for example, when used in treatment
or production wells, or in wells with tubing). Moreover, DAS data can be acquired
over the entire well at once while geophones are mostly deployed in short arrays,
so covering a significant part of the well requires moves of the geophone array and
repeatable sources. Thus geophones are not ideally suited for instantaneous coverage
72
over large distances, as required for multi-stage hydrofrac monitoring or microseismic
monitoring.
In addition to the advantages above, DAS opens up more possibilities for VSP
surveys that are either not possible or prohibitively expensive using geophones. DAS
makes simultaneous multi-well VSP economically feasible and paves the way for 3D
VSP surveys that allow imaging of the reservoir in the vicinity of the boreholes. More
importantly, FO cables once installed permanently can be used for later time-lapse
surveys without needing to interrupt the well operations, leading to significant cost
reductions in 4D VSP surveys allowing for more frequent offshore and onshore 4D
VSP surveys (Hornman, 2013). Since DAS uses a regular optical fiber for sensing,
older wells with fiber optical cables installed for other purposes can be monitored
with DAS as well. DAS looks promising for monitoring microseismic activity as well
(Karam et al., 2013; Webster et al., 2013). In chapter 4, we discuss a DAS field trial
for active monitoring of hydraulic fracturing with FO Cable in a treatment well. For
all these reasons it is very likely that in the near future DAS will play an important
role in reservoir monitoring and management.
While adopting DAS for borehole seismic measurements it is important to understand the physical quantity that DAS measures and the relationship of those measurements to geophone measurements, sensitivity of DAS measurements, and the effect
of environmental factors such as the borehole, cable design, pressure and temperature effects. In this chapter, we first describe the DAS system and show that DAS
measures the axial strain or strain-rate in the fiber depending on the implementation
of the system. We then study the sensitivity of DAS to arbitrary incidence of plane
P- and S-waves and relate the DAS response to geophones. Subsequently, we study
factors that effect DAS measurements. We first describe the dependence of DAS measurements on temperature and strain in the fiber. We then study the DAS response
in open and cased boreholes for the cases when DAS is either installed in the borehole
73
fluid or cemented outside the casing and show that the sensitivity of DAS to an incident wavefield is different for these two deployments. Also, we discuss the radial and
azimuthal placement of FO cable in the borehole and look at the relationship between
motion in the formation and the DAS measurement. The optical fiber in the cable
is coupled to the formation through layers of rubber/polymer or steel in the cable.
Through a simple model we relate strain in the formation to the strain in the fiber
core. We-show that cable design do not influence the sensitivity of measurements significantly when DAS is cemented outside the casing. Finally, for time-lapse studies, it
is important to isolate sensor effects in order to monitor reservoir changes. Therefore,
we analyze the effect of changes in refractive index of the fiber, fiber coupling and
cement properties on time-lapse DAS measurements. The objective of the chapter is
to systematically analyze the factors that effect DAS measurements in a VSP setting,
compare DAS sensitivity under different conditions and recommend best practices for
DAS VSP.
3.2
Distributed Acoustic Sensing
A typical DAS VSP system (see Figure 3-1) is comprised of an Interrogator Unit
(IU) at the surface connected to a FO cable installed in the well.
In practice, a
single FO cable contains multiple single mode fibers for redundancy. The interrogator
unit emits short laser pulses into the fiber and analyzes the back-scattered energy
through Coherent Optical Time-Domain Reflectometry (COTDR) to measure strain
in different sections of the fiber. Each of the fiber sections acts like a single component
seismic sensor measuring axial strain in the fiber caused by the incident seismic wave.
The length of these sections over which strain is measured is called the gauge-length.
The spacing between these sections is the receiver/channel spacing for DAS.
74
3.2.1
Scattering mechanisms
Currently there is no standard for DAS systems and they may differ in the type of
scattering studied or the implementation of COTDR. The three important scattering
mechanisms that could be used for distributed sensing are Raleigh scattering, Raman
Scattering and Brillouin scattering (Z. Fang et al., 2012, p. 278). Raleigh scattering
occurs due to small axial variation in the refractive index related to micro-defects
in the silica core of the fiber. Raleigh-scattering is an elastic scattering mechanism
where the wavelength of the back-scattered energy is the same as that of the incident
pulse. On the other hand, Raman scattering and Brillouin scattering are inelastic
scattering mechanisms and the scattered photons shift to lower and higher (stokes or
anti stokes scattering) frequencies relative to the incident pulse. Raman scattering is
caused by changes in atomic vibrational states while Brillouin scattering is caused by
changes in molecular or lattice vibrational states. Raman scattering is more sensitive
to temperature fluctuations and is used for distributed temperature sensing (DTS).
Brillouin scattering is sensitive to both temperature and strain, and can be used
to measure both. However, Brillouin scattering is the weakest of all the three and
requires more stacking to enhance the signal. Raleigh scattering is the strongest and is
more applicable for applications involving dynamic measurements at a high sampling
rate. For this reason, most of the DAS systems described in the literature use Raleigh
scattering. We describe DAS based on Raleigh scattering.
3.2.2
Coherent Optical Time Domain Reflectometry
When a narrow-band pulse of width T is sent into the fiber, at any given time it
occupies a length rc
in the fiber. Here, c is the velocity of light in the fiber. The
contribution to the back-scattered signal recorded at time to comes from the section of
the fiber at a depth toc/2 - Tc/4 to toc/2+ Tc/ 4 . This section is called the scattering
region or the resolution cell. The net scattered signal from the resolution cell is the
75
vector sum of the amplitude and phase due to all scatterers in the resolution cell and
results in a random amplitude and phase. This results in large fluctuations in the
amplitude of back-scattered signal from different depths and is called fading. When
the input pulse is coherent the scattering from all the scatterers in the resolution cell
is correlated and has a stable relationship even though the amplitude and phase of
the summed scattered signal are still random. Consider two points A and B on fiber
separated by a distance L. Let the back-scattered signal from points A and B have
amplitude El, E2 and phase
4PD2,
respectively. The phases are stable as long as
the fiber is not disturbed. When the fiber is disturbed between the two points, the
additional phase-lag A4 between the back-scattered signals from the two points is
quasi-linearly proportional to the elongation of the fiber between points A and B and
is given by (Grattan & Meggitt, 2000, p. 168):
A4
2wr
2wr
A,
A,
= n, r6L = n,--Lezz,
(3.1)
where n, is the refractive index of the fiber core, A, is the wavelength of the laser,
SL is the elongation of the fiber, and Ezz is the axial strain in the fiber averaged over
a gauge-length. Thus, by measuring the phase difference between the back-scattered
signal from the points A and B, the strain in that section of the fiber can be estimated.
The distance between these two points is the gauge-length L and each combination
of such points acts as a DAS receiver. The depth of the receiver is obtained from the
two-way travel time of the back-scattered signal. This is the basic principle behind
all COTDR systems.
Hartog et al. (2013) describe three different COTDR systems (see Figure 3-2) to
determine the phase difference between the back-scattered signals from A and B. All
the systems have a laser as a coherent light source and a photo-detector that converts
the intensity of the back-scattered light into electric voltage. Since the frequency
76
of light is much higher than the maximum recordable frequency of the electronics,
the phase of the back-scattered signal cannot be recorded. To overcome this, in the
first kind of COTDR system, two pulses of slightly different frequencies (wi, wi + Aw)
separated by time rg
=
2L/c are sent into the fiber such that the back-scattered signal
due to the first pulse at B and that due to the second pulse at A reach the photo-
The intensity I, at the photo-detector is given by
-
detector at the same time forming a recordable beat signal (heterodyne detection).
I1 oc E + E22 + 2E1 E2 cos(Awt + A4 + (D2 - (D).
(3.2)
The intensity measured as above preserves the phase information as long as Aw =/ 0.
In the second kind (Posey et al., 2000; Farhadiroushan et al., 2010), a single pulse is
used. When the back-scattered signal reaches the launching end, the signal is split
into two paths such that the path difference is L. When combined, the back-scattered
signal in the two paths correspond to signal from two points in the fiber separated
by a distance L. Direct combination of the two paths would not preserve phase since
both the paths have the same frequency. These signals are recombined through an
interferometer to preserve the phase information (homodyne detection).
In these
two cases the gauge-length L is fixed prior to acquisition. Hartog and Kader (2012)
proposed a third kind where the back-scattered signal from the fiber is combined with
a local oscillator connected to the laser. The frequency of the pulse input into the
fiber is modulated to be slightly different from the laser frequency, say w, + Aw, so
that beats are formed at the detector preserving the phase information. The intensity
13 recorded by the photo-detector is given by (Z. Fang et al., 2012, p. 296)
I
E+
2c EL + 2EEL cOs OL cOS(AWt + A
+
4
i -
where EL, (DL are the amplitude and phase at the Local oscillator.
77
,
(3.3)
9
L(t) is the
polarization deviated from local oscillator. This intensity is digitized and the phase
difference between different points in the fiber can be obtained through correlating
windowed sections of 13 in the digital domain. This allows a variable gauge-length
that could be optimized for signal-to-noise ratio and spatial resolution.
Note that the phase-lag measured in the above three methods includes the difference in the random phases at points A, B and the phase-lag due to fiber deformation.
The phase difference due to fiber deformation is obtained by correlating the beat
signal from two sampling times. Since the random phases at A and B are stable, the
change in phase of the beat signals between any two sampling times is due to deformation of the fiber between the points A and B. If the beat signal at all sampling
times is correlated with respect to the signal at a reference time, we measure strain
in the cable with respect to that reference state. However, at each sampling time if
the reference is the previous sampling time, we measure the change in strain during
one sampling period. Thus we measure strain-rate averaged over the sampling period
rather than strain with respect to the state at rest.
The wavelength of the input pulse is chosen so that the losses in the fiber are
minimum and the back-scattered energy from the bottom of the fiber reaches back to
the launching-end of the fiber. However, larger fiber loss means larger back-scattered
signal. The trade off between probed distance and signal quality should be considered
before choosing a wavelength for particular application. A wavelength of 1550 nm
is preferred for minimum losses. The ping rate of the laser or the sampling rate for
measuring the strain depends on the length of the fiber. A new pulse can be launched
into the fiber only after the previous pulse has returned to the launching end. The
velocity of light in the fiber is approximately 2x 10 5 km/s and for a 10 km cable the
maximum ping rate is 10 kHz (Parker et al., 2014). It may be necessary to repeat
the measurements for stacking purposes and the sampling rate is usually lower than
the maximum ping rate. The pulse width is usually on the order of 10-1000 ns and
78
occupies about 2 m in the fiber for a 10 ns pulse. Receiver spacing cannot be smaller
than the pulse length in the fiber. The gauge-length determines the minimum strain
in the fiber that can be resolved for a given phase detecting capability (Posey et al.,
2000). For the same strain, the elongation over a gauge-length is larger for larger
gauge-length. Since measured phase-lag is proportional to the elongation in the fiber,
with increasing gauge-length smaller strains can be detected.
At the same time,
the spatial resolution decreases with increasing gauge length and higher frequencies
are distorted (see section 3.3.2).
Typical gauge length values vary from 7 to 35 m
(Mateeva et al., 2014).
3.2.3
Limitations
Signal-to-Noise Ratio
DAS has a lower signal-to-noise ratio compared to geophones (Mestayer et al., 2012).
The noise floor in DAS is reported to be 30 dB above geophones (Mateeva et al., 2014).
This limits the use of DAS in projects with weak signals. Our current approach to
overcoming the ambient noise floor of DAS is through increased source effort (e.g.,
stacking more sweeps). The noise floor is likely to be addressed in future generations
of the Interrogator Unit.
Depth Calibration
DAS measurements are associated with a certain depth along the fiber based on the
arrival time of the back-scattered light, assuming a certain velocity of light in the fiber.
However, the optical length (along the fiber) can be larger than the measured depth
along the well for a number of reasons. For example, because of cable slack along
the completion, extra cable length needed for splicing at features such as packers,
fiber overstuffing in the manufacturing process where the fiber length is made larger
than the cable length to prevent snapping when stretched, etc. All of these lead to
79
some positional uncertainty that increases with depth. To minimize it, we look for
correspondence between DAS signals and known depth features in the completion or
the formation.
Broad-side sensitivity
Standard FO cables are sensitive to strain along the length of the cable and not
to strain perpendicular to the cable (broadside to the fiber).
As a result, DAS is
more sensitive to P-waves and less sensitive to shear waves when their propagation
direction is almost parallel to the fiber. This issue is discussed further in section 3.3.1.
Hornman et al. (2013) report new cable design to address the broad-side sensitivity.
3.3
Comparison to Geophones
In this section we relate DAS response to geophone response and discuss the sensitivity of DAS measurements for arbitrary incidence of P- and S-waves. Based on this
analysis, we explain the broad-side sensitivity of DAS and also the effect of gaugelength on DAS measurements.
We consider P- and S- plane-wave incidence at an
arbitrary angle on DAS FO cable and geophones buried in an infinite isotropic homogeneous medium with P-wave velocity a and S-wave velocity
fi.
. The z-axis of the
co-ordinate system is taken to be along the axis of the FO cable. Let the wavenumber vector in each case make an angle 6 with the z-axis, and an angle Q with x-axis
on the xy-plane. We can express the particle motion due to a propagating wave in
terms of displacement potentials <$,
and 0 as given in Appendix B.1. The particle
displacement vector is then obtained from the potentials using Equation B.3 and the
particle velocity vector is then given by V' = -iwu.
80
P-wave incidence
For an incident P-wave, shear-wave potentials p, Op are zero. Taking Op
=
2ei-wt)
the particle velocity in the formation can be written as V' = Ao[sin 6 cos Q&+sin 6 sin Qy+
cos 62]eid-a t) and the strain c,_ in the z-direction can be written as
6
zz
auz
=
D9z
ikz
hr k,_,= kcos6
where
Z
-cos6
cos 2 6eid.x-t)
(3.4)
The velocity vector represents the response of a multi-component geophone.
The
-A
a0
response of a vertical component geophone is given by the z-component of velocity,
vZ = Ao cos 6e(k--w'). As discussed in the previous section DAS measures average
strain or strain-rate over a gauge-length. Thus, the DAS response E DAS can be written
as:
Ezz
LDAS
_
zz
_
-
o
Cos2
Sezz
eIAS
LZ-
(3.5)
sinc(kzL/2)
Similarly, we can show that
eikzz'dzl
i(kxx+kyy-wt)
L
a
J1
,z+L
2 i(k--x+kyy-wt) e kZ
= A-Aocos 2,
2
Iz-k
ikz
aL
-A 0 cos 2 Sei(kxx+kyy+kzz-wt)sin(kzL/2)
kz L/2
a
= ezz sinc(kzL/2). When DAS measures strain-rate,
the DAS response can also be interpreted as the difference in the velocities measured
by two vertical component geophones separated by a gauge length (vz(z + Z) and
vZ(z -
y)) as below (Mateeva et al., 2014)
iwAO
*DAS
=
a
a
2sin(kzL/2)
cos
kzL/2
81
2 ei(kwt)
)
- e-ikz) ei(--)
A 0 cos 6 (eik
L
\
VZ(z + j-Vz(z - L)
=
L
2(3.6)
S-wave incidence
We can decompose an arbitrarily polarized incident S-wave into an SV component
polarized in the plane containing the ray and the FO cable, and an SH component with
polarization normal to this plane. The out of plane SH component does not contribute
to strain in the z-direction or z-component of particle velocity. Without any loss of
generality, we take Q = 0 and consider a S-wave on xz-plane. The potential sv
corresponds to the SV-wave polarized in the xz-plane. Taking sy = -iA3 2 i(-wt)
w sin 6e
the particle velocity vector can be written as V= Ao[- cos &s + sin 6o]e-. Thus,
the strain in the z-direction is given by
EZZ=
ikzv , where k
=
=
k cos 6 = -cos 6
-A 0
0e~~t-A 0
-sin 6 cos 6e2i~3=
sin(26)ei(k-Wt)
/32/
(3.7)
The response of a vertical component geophone is given by vz = Ao sin 6e(k-Wt) and
the DAS response is given by
EfDAS
j
Zz
Z_12
L
dz'
=
A sin*(26)ei(kxx+kVYwt)
2 eikzz'dz'
fz- L
213L
2
-Ao sin(26)ei(kxx+kyy+kzz-wt) sin(kzL/2)
2/L
kzL/2
= Ez sinc(kzL/2)
and
eDAS
=zz
(3.8)
sinc(kzL/2). As with the P-waves, the analogy of differential geo-
phones holds true for S-waves as well, as shown below
82
-DAS= iwA 0 .
c
ZZ
6 sin(kzL/2) ei(wt)
kzL/2
-
A sin 6 (eik
L
\ L
L
L
-
e-ikz) ei-y")
.
(3.9)
Until now we considered the cases when optical phase-lag measured by DAS corresponds to either axial strain or strain-rate in the fiber due to the incident wave.
The results and conclusions we show in the remainder of the chapter do not differ
for strain or strain-rate (except for the -iw factor) and from now on we assume that
DAS measures strain. All the discussions hold equally well for strain-rate.
3.3.1
Broad-side sensitivity
As shown in the previous section, both the vertical component geophone response
and DAS response are sensitive to the angle of incidence 6 from the z-axis. For an
incident P-wave, the geophone response is proportional to cos 6 while DAS response
is proportional to cos 2 6. Figure 3-3 shows sensitivity as a function of incidence angle
for both P- and SV-wave incidence. We define sensitivity for DAS as the ratio of
measured strain to the strain amplitude of the incident wave (-Ao/a, -AO/
P- and SV-waves, respectively ).
for
For a geophone it is the ratio of the measured
velocity to the velocity amplitude of the incident wave. Both geophone and DAS
are insensitive to P-waves incident at 6 = 900, i.e, perpendicular to the fiber axis.
For an incident S-wave, the geophone response is proportional to sin 6 while the DAS
response is proportional to sin(26).
Both geophone and DAS are insensitive to a
S-wave propagating parallel to the z-axis. A geophone has maximum sensitivity to a
S-wave incident at 6 = 900, while DAS has maximum sensitivity to a S-wave incident
83
at 45*. DAS is insensitive to both P- and S-waves incident normal to the fiber. This
is called Broadside-sensitivity.
Another distinction between DAS and a vertical component geophone is the polarity. Polarity doesn't change with angle of incidence for DAS while it does for
geophone as shown in Figure 3-3. As a result both upgoing and downgoing P-waves
have the same polarity on a DAS recording while they have opposite polarity on a
geophone recording. In the case of S-waves, geophone recordings have different polarities for right-going (+ve x-axis) and left-going (-ve x-axis) S-waves, while DAS
doesn't distinguish between them. For both P- and S-waves, DAS and vertical component geophone are insensitive to the azimuth of the incident wave (Papp et al.,
2014). However, the azimuth can be uniquely determined with a multi-component
geophone.
In the above discussion we neglected the effect of borehole and cable design on
the sensitivity. These will be discussed in later sections.
3.3.2
Effect of gauge length
Since DAS measures strain over a finite length, DAS response is given by the axial
strain multiplied by a factor sinc(kzL/2) as shown in Equations 3.5 and 3.8. Here,
k, is the apparent wavenumber along the FO cable axis as the cable is aligned along
the z-direction.
The multiplicative factor can also be written as sinc(7rL/App) or
sinc(7r cos 6Lv/V), where
Aapp
=
cos 6 is the apparent wavelength along the axis of
the FO cable and v is the frequency of the incident wave. We can view this factor as a
sinc filter applied in the frequency domain. Figure 3-5 shows the amplitude response
of the filter as a function of wavelength. Note that the filter acts like a low-pass filter
and also has notches at L = nAapp, for n = 1, 2,3..., oo i.e., when the gauge-length is
an integral multiple of the apparent wavelength. For example, n = 1 represents the
case when the apparent wavelength is equal to the gauge-length. When the strain is
84
integrated over one wavelength, positive and negative strain add to zero. For a P-wave
propagating parallel to the cable and for a gauge-length of 10 m, and propagation
velocity 4000 m/s, the first zero of the sinc function happens at 400 Hz. Similarly,
when gauge-length is an integral multiple of apparent wave-length, strain over each
wave-length adds to zero and strain over the gauge-length sums to zero. Collecting
DAS data at different gauge-lengths can help mitigate this problem as the notches
occur at different frequencies.
However, we still have the problem that amplitude
response falls off with increasing frequency.
The spectral changes caused by averaging strain over a gauge-length depend on
the angle of incidence of the wave as well as the propagation velocity at that location.
For a given propagation velocity, as the angle of incidence increases, the first notch
occurs at a higher frequency and when 6 = 900, all the frequencies are preserved
exactly.
Similarly, for a given incidence angle, the first notch occurs at a higher
frequency for larger propagation velocity.
at very high rates (~
Even though a DAS system can sample
20 kHz), for practical considerations we may only record the
frequencies within the first lobe of the sinc filter with fidelity. Thus, we want to set
the gauge-length so that the highest frequency of interest is preserved for the lowest
velocity in the well and for zero angle of incidence. As a rule of thumb, the design
gauge-length must be less than half the minimum wavelength to be preserved.
Using a large gauge-length one can detect smaller amplitude strains and thus
signal-to-noise ratio is better. However, it comes at the cost of losing spatial resolution
and higher frequencies. It would be ideal to set gauge-length after collecting the data.
Efforts are being made to design such systems.
85
3.4
Strain and temperature effects on DAS measurements
In the previous sections we described DAS and related it to geophone measurements.
In the following sections, we comprehensively study the effect of various factors on
DAS measurements. We first discuss the effect of temperature and strain on DAS
measurements in this section and in later sections we study the effect of borehole,
cable placement and cable design.
In addition to the axial strain caused by the incident wave, the measured phaselag is affected by thermal strains in the fiber and also by changes in the refractive
index of the fiber core caused by strain in the fiber and temperature. We describe
these effects below. The optical phase of light as it travels through a single mode
fiber over a distance L is given by (Grattan & Meggitt, 2000, p. 168)
27rnL
Al
(3.10)
A small change in the optical phase can be written as
A
= -AL+
aL
an,
= O(AL +
L
ne
Anc+
a8j
A1 )Al
A
(3.11)
The first term in the brackets denotes the effect due to elongation of the fiber which
could be due to both stress and temperature. The second term is due to the refractive
index changes in the fiber. The third is due to the changes in the wavelength of the
light or the dispersion. The third term is neglected since we are looking at Raleigh
scattering and the source is coherent. However, refractive index changes due to stress
(photo-elastic effect) and temperature (thermo-elastic effect) should be accounted for
86
in the measured phase-lags.
Strain
In an isotropic material, change in refractive index is related to strain through the
Pockel's coefficients pu and
as below (Born et al., 1999)
P12
P11
P12
P12
Ay
P12
P11
P12
Cyy
Ancz
P12
P12
P11
Ezz
n,,,
1
-xx
-2
2
3
(3.12)
where, E.., cEy, ezz are strains in the fiber core. Here, we assume that the fiber axis is
along z-axis and the principal stress directions are along coordinate axes. For a silica
fiber pu = 0.113 and P12 = 0.252 at 632.8 nm wavelength (Bertholds & Dandliker,
1988). The fundamental mode in a single mode fiber is a transverse mode traveling
along the z-axis and is effected by the changes
ancx and Ancy. When nex,ncy differ
it causes birefringence, a phenomenon similar to shear wave splitting. Assuming that
the polarization is along the x-direction, the total phase-delay due to strain in the
fiber can be written as
=
AL
4 (=-D-
Anc
+
ne
L
)
2
=
(zz(1
= 'Iezz((1
-
P12
-
2
2
2
(CZz
-
nc(P1 1 Cxx + P12(Eyy + ezz)))
2
2
)
-
)-
2
2
(P11'Exx+ P12Eyy))
(Pll +P 1 2 )1E), assuming Exx
(3.13)
Ezz
Taking pu = 0.113 and P12 = 0.252, and n, = 1.47, AG = 27,cL Eezz(0.
728
- 0.394
).
As we can see, the contribution to phase-lag from refractive index changes is not
negligible and radial strains in the fiber contribute to the measured phase-delay as
well. However, when
EXX,
1EY are small compared to ezz, the effect of refractive index
change is only a scale factor. The strain in the fiber core depends on the coupling of
87
the fiber with the formation and is discussed in section 3.6. Note that the strains in
Equation 3.13 are strains in the fiber averaged over a gauge-length though we denote
them as strain in the fiber. In the remainder of the chapter, it is understood that
they are related to the strain in the fiber through Equations 3.5 and 3.8.
Temperature
Temperature causes thermal expansion in the fiber and also changes the refractive
index. When the fiber freely responds to changes due to temperature and is not subject to external force, the phase-delay due to temperature can be written as (Z. Fang
et al., 2012, p. 96)
Anc
LaTAT
d-nAT
L
ne
L
n
=DAT(aT + d/nc)
dT
where AT is the change in temperature,
expansion coefficient for silica fiber and
OT
)
AL
(3.14)
= 0.55 x 10-6 C-1 is the thermal
~ 10- 5 K- 1 is the thermo-optic coefficient.
-
For any given perturbation in temperature AT, the term due to refractive index
change caused by temperature (-jn/nc
magnitude than thermal expansion
(aT
~ 0.68 x 10- 5 K- 1 ) is one order larger in
= 0.55 x 10-6) and is more important. A silica
fiber in reality is embedded in a cable which in turn is cemented in the formation and
is not allowed to expand freely. One needs to consider the effective thermal expansion
coefficient of the total FO system including packaging for accurate estimates of phaselag due to thermal expansion.
Now, let us consider the case when we have dynamic strain in the fiber (due
to an incident acoustic wave) along with temperature variations. The contribution
to phase-lag due to temperature changes may be larger than that due to dynamic
strain, especially during hydraulic stimulation. However, strain fluctuations due to
88
temperature occur at lower frequencies (below 2 Hz) as compared to dynamic strains
due to an incident wave. So, we can filter the low-frequency component of the strain
which is predominantly due to temperature.
3.5
Effect of borehole on DAS VSP measurements
We next study the effect of the borehole on DAS measurements.
When a wave is
incident on a borehole, part of the energy is scattered by the borehole. Thus, the
wave-field recorded in the borehole does not exactly represent the wave-field in the
formation and is affected by the borehole dimensions, the frequency and angle of
incidence of the incident wave-field, properties of the layers (e.g., cement, casing or
damage zone) around the borehole, azimuthal placement of the sensor with respect to
the incident wave, among other factors. In addition, a DAS FO Cable may be installed
in multiple ways: hung in the borehole fluid, installed on the production tubing or
cemented outside the casing. In this section, we study these borehole effects on DAS
measurements. In particular, we analyze the sensitivity of DAS measurements to Pand S-wave incidence for the cases when the FO cable is hung in the borehole fluid
or cemented outside the casing. We consider open and cased cylindrical boreholes
in both hard and soft formations. We obtain the strain in the fiber due to incident
plane-waves by solving a radially layered borehole problem in cylindrical coordinates.
We neglect the effect of FO cable design in this section (studied in the next section).
An analytical solution for non-normal incidence of plane-waves on an open cylindrical
borehole was obtained by Schoenberg (1986) for low frequencies. Later, Peng et al.
(1994) extended it to a multi-layered borehole and for all frequencies.
follow the work of Peng et al. (1994) in this section.
89
We closely
Layered Borehole Model
3.5.1
We consider a cylindrical borehole with M+1 layers (see Figure 3-4) around the
borehole, M annular layers sandwiched between the borehole fluid and the formation
(M+1s layer).
Each of the layers is taken to be homogenous and isotropic with
density Pm, P-wave velocity am and S-wave velocity 13m. The acoustic velocity in the
borehole fluid is af and the density is pf. Let the radius of the borehole be rb and the
outer radius of the mth layer be rm. The M+.1s layer is the formation and is infinite
in extent. When a plane wave is incident at the interface between the formation and
the mth layer, some energy is transmitted into the borehole layers and some energy is
reflected into the formation. Let the particle displacements in the borehole fluid uf
and the mth layer un due to the reflected and transmitted wave-field be given by the
potentials
#fand
'
,(m,"m, respectively. As shown in equation B.2, the potentials
m
satisfy the following equations
a2V2 0
V2- =0
a
In
_
0=
2
-(3.15)
The general solutions to the above equations are given by
00
Of =
E ninAn Jn(kfr) cos(nO),
af
n=O
00
pH(k"r)+P(m) H 2 (k(m)r)] cos(nO),
inm (
i[E,
am
n=O
=
2
Oni"[F")H(km)r)
= i=O
+ Q(m)H2 (k(m)r)] cos(nO),
00
Om i3mW
2
E3 E~nn[G( )H(k(m)r)
n=O
90
+ R$~m)H2(k~m),r)1 sin(nO),
(3.16)
where en
0 if n=0, and 2 otherwise.
=
The time-dependence factor expi(kzz-wt) is
assumed for all the potentials above. k, is the wavenumber in the z-direction. kf =
W2/a 2-
k2 is the radial wave number in the borehole fluid, k(m) =
and k.") =
\I2/g2
VW2/a2
- k2
- k2 are the radial wave-numbers for P and S-waves in the
m"' layer, respectively. kf,k(") and k(m) are chosen such that the imaginary parts
are positive.
Jn is Bessel function of the first kind and order n.
H',H2 are nth
order Hankel functions of first and second kind, respectively. Hankel functions of
first kind represent outgoing waves, while the second kind represent incoming waves.
An,En",Pn"mF,Qi",Gl"m, Rm) are unknown coefficients to be determined from
the boundary conditions.
The above expressions are valid for an incident P- and
SV-wave. For an incident SH-wave, the cos(nO) factors should be replaced by sin(n6)
and sin(nO) be replaced by - cos(n9). The factor ei(kzz-t) is assumed in all the
expressions for potentials, displacements and stresses.
Without any loss of generality, let the incident plane wave be in the x-z plane
(Q = 0) and make an angle 6 with the z-axis (as shown in Figure 3-4). The plane wave
can be expressed as a summation of Bessel functions in the cylindrical coordinates
and is given by (Schoenberg, 1986)
Incident P-wave:
00
#p = a
eninJn(kpr)cos(nO)
n=O
Incident SV-wave:
sv
=
2k!, OeinJn(ker)cos(n6)
n=O
Incident SH-wave:
S=H k Zen inJn(kr) cos(nO)
ks n=O
91
where k3 = w/l3 and k 8 /ka = sin6.
To solve for the coefficients in equation 3.16, we require that the displacements
and tractions be continuous at all the solid layer interfaces. Since the potentials are
expressed as summation of orthogonal modes, the displacements and tractions are
continuous for each mode. Let bm"n) be the displacement-stress vector for mode n and
layer m. It is related to the coefficient vector en by (Peng et al., 1994)
Dm (r)c-n,
(3.17)
-m)(r)
o(")
P(m)
(M)
G(m)
(in)
Fl(Mf)
r~n
R)
("n)
The matrix Di") is given in Appendix B.2. Thus, for all the interfaces between the
annular layers we have
gi) (rm)
-
6(M) (rm) for m=1 to M-1
(3.18)
At the borehole wall, the interface between the borehole fluid and the first layer, only
the radial displacement, radial stress are continuous and the shear stresses go to zero.
We have
U4L(rb)
S62) (rb)
oaIrn(Tb)
afkf J' (kfrb)
Pf afw2 Jn(kfrb)
An
=
0
0
0
0
92
fAn.
(3.19)
In the formation (M+1
layer), we only have outgoing waves in the reflected wavefield
so as to satisfy the radiation boundary condition at r = oo and P,(M+) _ Q(+1) _
R(M+l) = 0. The total wavefield in the formation is the summation due to incident
plane wave and the reflected waves. Thus, the continuity condition at the interface
between the M"h layer and the formation, r = rM, can be written as
D z+l)(rm
where
)c$M+1)
+
n (rM) = D ")cM),
(3.20)
'n is the displacement-stress vector due to the incident plane wave and is
given in Appendix B.3 . All the coefficients can be obtained by solving the system
of equations 3.18, 3.19 and 3.20 for each mode and summing up the solution. For
our simulations, we summed the first 20 modes (by which the solution converges).
Once the coefficients are obtained, the pressure in the borehole P(r, 6) is given by the
Equation B.5 and the stresses and strains in each layer are given by the Equations
B.6 and B.7, respectively.
We use the above model to simulate P- and S-wave incidence on open and cased
boreholes and the sensitivity of DAS for different deployments.
In the following
discussion, we discuss the results from the simulations for different scenarios.
3.5.2
FO Cable in the borehole fluid
We consider a FO cable hung in the borehole fluid, but not touching the borehole
wall. Under this assumption, the particle displacement parallel to the cable axis is
discontinuous across the solid-fluid boundary and the cable interacts with the borehole
environment through the fluid pressure. Thus, it acts like a hydrophone and senses
pressure in the borehole fluid. In Section 3.6 we will relate the pressure in the borehole
to the phase-lag measured by the DAS fiber. For now, we consider the effect of the
borehole on the pressure in the borehole fluid. Note that the DAS sensitivity in the
93
borehole fluid will qualitatively follow the pressure sensitivity since strain in the fiber
is proportional to the pressure in the fluid.
Peng et al. (1993, 1994) studied the effect of an open and cased borehole on
downhole geophone measurements due to incident P- and S-waves. In this section,
we reproduce Peng et al. (1993, 1994)'s results for pressure in a borehole due to
incident plane waves. We consider two types of formations: fast (Berea sandstone:
a = 4206 m/s, #3 = 2664 m/s, p = 2140 kg/m3 ) and slow (Pierre shale: a = 2074
m/s, f = 869 m/s, p = 2000 kg/m3 . The borehole radius is 0.1016 m and the fluid
properties are af = 1500 m/s and pf = 1000 kg/M 3 . In an open borehole, the fluid
is in direct contact with the formation. However, boreholes are usually cased and an
additional layer of cement is laid outside the casing. We term them cased boreholes.
Open Borehole
When a plane P- or S-wave is incident on the borehole, it perturbs the borehole
diameter and induces pressure in the borehole fluid. Given the particle motion, SHwaves do not cause pressure changes in the borehole and will not be recorded by DAS
installed in the well. Figure 3-6 shows the borehole reception pattern for pressure in
the borehole for incident P- and SV-waves in hard and soft formations. We plot the
ratio of fluid pressure at the borehole center to the stress amplitude of the incident
P-wave (Pb|/Iaincl =
IPbI/IpaW 2 |) as a function of incidence angle. The incident
P- and SV-waves considered here have the same displacement amplitudes. In a hard
formation, pressure in the borehole is minimum at zero incidence angle and maximum
at normal incidence for P-wave incidence. However, for P-wave incidence in a soft
formation, pressure in the borehole is more or less uniform over all incidence angles
and is larger than the hard formation case by a factor of 5. SV-waves are sensitive in a
window around 450 angle of incidence. In a soft formation, SV waves cause resonance
(see Figure 3-6d) in the borehole when the apparent velocity along the borehole is
94
equal to the tubewave velocity (Peng et al., 1993). In Figure 3-6d, the data points are
not plotted when the amplitudes are beyond the radial limits on the plot. Observe
that the pressure in the borehole for both P and SV-wave incidence is essentially
frequency independent within the range of interest for VSP (<500 Hz). Because the
cable is installed in the borehole fluid as opposed to a solid, the reception pattern is
different from Figure 3-3
In practice, DAS FO cable cannot be placed exactly at the center of the borehole
and may be laid along the borehole wall. We compare the pressure at the borehole
wall to that at the borehole center for different receiver azimuths (see Figure 3-7).
We find that, for frequencies less than 500 Hz, the pressure in the borehole varies by
less than 2% with azimuth and radial distance from borehole center for both P- and
SV-wave incidence. Hence, we do not expect significant change in DAS response due
to location of the FO cable.
Cased Borehole
For the cased borehole model, we consider a 0.0203 m thick casing layer between the
borehole fluid and the formation. The casing density, P- and S-wave velocities are
taken to be 7500 kg/m3 , 6100 m/s and 3350 m/s, respectively.
Figure 3-8 shows
the borehole reception pattern for the cased borehole. The steel casing shields the
borehole from deformation due to incident waves. As a result the pressure amplitude
in the borehole is lower than that in the open borehole case. The pressure amplitudes
are reduced by a factor of two for both P- and S-wave incidence in a hard formation as
compared to an open borehole. The shielding effect is more pronounced for P-wave
incidence in soft formation where the overall amplitudes decrease by more than a
factor of 5 and also the borehole is perfectly shielded for a particular angle of incidence
(about 370 in the current case) based on casing thickness (Peng et al., 1994). The
resonance phenomenon for SV-wave incidence in soft formation is still present but
95
at a different angle since tubewave velocity is different for a cased borehole. The
frequency dependence and azimuthal variation are similar to the open borehole case
and do not influence DAS measurements.
For both open and cased borehole cases we assumed that the FO cable does not
touch the borehole wall. This is very unlikely and we expect the FO cable to touch
the borehole wall, at least at certain stretches. In the case when the cable is strongly
coupled with the borehole wall, it may respond to both pressure in the borehole fluid
and the axial strain in the wall. Qualitatively, the sensitivity due to strain in the
borehole wall will be similar to the case when the FO cable is cemented outside the
casing. When we discuss the cable design in Section 3.6 we argue that coupling with
the borehole wall may be a stronger signal than that due to fluid pressure. Future
studies for DAS placement in borehole fluid should study the coupling of FO Cable
with borehole wall.
3.5.3
FO Cable cemented outside the casing
We now consider the case when the FO cable is attached to the casing and cemented
against the formation. In this case, there is a casing and a cement layer between
the borehole fluid and the formation. The fluid, formation and casing properties are
taken to be same as in Section 3.5.2. The cement layer is taken to be 0.02 m thick
with p =1920 Kg/m 3 , a = 2823 m/s and 3 =1792 m/s. We assume that the fiber
is perfectly bonded with the cement and tracks the strain in the cement along the
z-direction (axis of cable) at the casing-cement interface. The phase-lag measured
in the DAS fiber depends on the axial strain in the fiber (along z-direction) as well
as the radial strain in the fiber through Equation 3.13. We will consider this effect
in Section 3.6 and show that axial strain contributes the most. For now, we study
sensitivity of axial strain for P- and SV-wave incidence given by the amplitude ratio
of the strain in the z-direction at the casing-cement interface (|ezz,) to strain due to
96
the incident P-wave away from the borehole (IcEI = w2 /a). We solved the problem
using the layered borehole model described in Section 3.5.1.
Remember that the
vertical displacement is continuous across the layers and as a result the strain along
the z-direction is continuous.
When the scattered wave-field due to the borehole
is small, the z-strain in the layers and the formation approach the z-strain due to
the incident wave-field. This is what a DAS cable would measure when buried in
an infinite elastic medium. Figures 3-9a and 3-9b show the strain sensitivity in an
infinite elastic medium ( with no borehole) for P- and SV-wave incidence in hard and
soft formations, respectively.
In the hard formation, the scattering due to the borehole is small for frequencies
below 500 Hz. As a result, the sensitivity of strain for P- and SV- waves matches
the case where the DAS is buried in an infinite elastic medium and follows cos2 6
and sin(26) dependence, respectively (see Figures 3-10a and 3-10c). For frequencies
above 500 Hz, sensitivity decreases since more of the incident energy is scattered.
In the soft formation, the scattering due to the borehole is non-negligible even at
frequencies as low as 100 Hz. Figures 3-10b and 3-10d show the sensitivity of strain
in a soft formation for P- and SV-wave incidence, respectively. The kinks in Figure
3-10d at 6 = 52.40 and 6
=
64.1' correspond to resonance in borehole fluid due to
SV-incidence and SP critical refraction at the casing-cement interface. Note that the
sensitivity decreases with frequency and is reduced by a factor of 2 from 50 Hz to
500 Hz. Observe that the sensitivity is high for P-waves at zero angle of incidence
as opposed to 90' for DAS in the borehole fluid. Figure 3-11 shows the azimuthal
dependence of sensitivity by plotting the ratio of JEzz| at each azimuth to IEZZI at zero
azimuth. In the hard formation, the azimuthal variation in strain is less than 1%
for frequencies up to 500 Hz. However, in the soft formation, azimuthal variation is
about 3% at 300 Hz and goes up to 6% at 500 Hz.
In summary, we conclude that the borehole effects are small for the frequencies
97
used in regular VSP surveys. When FO cable is cemented outside the casing, borehole
effects are small, but are non-negligible at frequencies greater than 500 Hz in hard
formations and 300 Hz in soft formations.
However, when it is deployed in the
borehole fluid, borehole effects are more important and sensitivity is governed by the
borehole reception pattern. The sensitivity to P-wave incidence differs significantly
when the FO cable responds to pressure in the borehole fluid or cemented outside the
casing. However, if the FO cable in the borehole fluid is strongly coupled with the
borehole wall, the sensitivity may be similar to the case when the cable is cemented
outside the casing.
3.6
Effect of cable design on DAS VSP measurements
In the previous sections, we assumed that the phase-lag measured by the DAS system
is proportional to the pressure in the borehole fluid or the axial strain in the cement
for the cases when the FO cable is either installed in the borehole fluid or cemented,
respectively. In fact, the measured phase-lag responds to the strain in the silica core
of the optical fiber which is coupled to the formation through the multiple jackets of
the FO cable and the coatings on the optical fiber. In this section we explore the
effect of cable design on DAS VSP measurements by relating strain in the fiber core
to the pressure in the fluid or the strain in the cement through simple models. Note
that the cable may not be perfectly bonded with the cement or the cement may not
be perfectly bonded with the formation. We do not discuss this in the current section
and assume perfect bonding between all the layers.
Typically, a FO cable may have multiple optical fibers packaged inside the cable.
Each fiber has a silica core, which is the actual sensing element, covered by a cladding
and one or more protective polymer or rubber layers. All the fibers are placed inside a
98
metal or plastic tube along with buffer material like Aramind fiber or a gel. Depending
on the purpose, the FO cable may have one or more metal/teflon outer jackets. The
purpose of the packaging is to protect the fibers from the handling stresses and the
downhole environment. Figure 3-12 shows an illustration of an FO cable cross section.
However, for the sake of modeling we consider a radially layered FO cable with a single
optical fiber at the center.
We can solve the exact 3D problem of a plane-wave incidence on the FO cable by
using the layered borehole formulation in Section 3.5.1. An FO cable is similar to a
layered borehole except that the central borehole fluid is replaced by an elastic solid
(silica core). In this case, all the three scalar displacement potentials exist for the
core and the boundary conditions between the core and the first layer are the same
as that for other solid-solid interfaces. For the case when the FO cable is in the fluid,
the formation in the borehole model is replaced by fluid and the boundary conditions
are changed accordingly. Given that the FO cable layers are very thin, the system of
equations to be solved are ill-conditioned for higher modes.
We solve a simple 2D static model with radial symmetry (see Figure 3-13) to gain
insight into the problem and for computational efficiency. We consider an FO cable
with M layers around the silica core. Let rm, am be the radius and area of the Mth
layer. Since the cable length is much longer than the diameter, we approximate the
elastic response of the cable with a 2D plane-strain problem perpendicular to the
axis of the FO cable (Budiansky et al., 1979; Hughes & Jarzynski, 1980). Under this
assumption, the axial displacements (z-direction), u)
same in all the FO cable layers and axial stresses oz
and axial strain Ezz
are the
are uniform in each layer. Due
to radial symmetry tangential displacement um = 0 and the equilibrium of stresses
lead to !
ds"ur =
const. Thus, the displacements in layer 'm' can be written as (Hughes
99
& Jarzynski, 1980):
(m)-~m~ +B(")
r
U(i) = 0
(3.21)
U0
where AC"n and BC"n are the coefficients for layer 'm', ezz is the unknown axial strain
in all the layers. However, in order to have finite displacement at r=O, the coefficient
B(-) = 0 for the silica core. The remaining 2M+2 unknowns are obtained by solving
the boundary conditions. At all the 'M' layer-layer interfaces we require continuity of
radial strain and radial displacement (2M equations). The remaining two boundary
conditions are different for the cable in fluid or solid cases and are discussed below.
Given the coefficients for each layer, the stresses and strains in layer 'm' can be written
as:
-~)
2 (A(in) + AWin)A(in) + Amcz- 2,(mn) BWi
rr
r2
) = 2A("n)A(") + (A(m) + 2p")czz
,(m)
rr"
-
=
A(m)
"
-
3.2
BWm
(3.22)
r- 2
where AC"m and p(m) are Lame's parameters in layer m.
3.6.1
Coupling in fluid
When the fiber is in fluid, we require that the radial stress at the cable surface
(r = rM) be equal to the pressure in the fluid (Orrr=rm = -Pf).
The last equation is
provided by assuming that the net axial force in the fiber is zero (Radial Model) or is
equal to the hydrostatic pressure times the cross-sectional area (Hydrostatic Model)
100
as given below:
M
0
amo() = 0, (Radial model)
M
0
M
amo
=
-Pf E am, (Hydrostatic model)
0
(3.23)
Hughes and Jarzynski (1980) tested both the models experimentally and showed that
the hydrostatic model is a more appropriate model for measuring static pressure. We
assume that it holds true for dynamic pressure measurements as well. Once the axial
and radial strains in the silica core are estimated by solving the system of equations,
phase-lag in the fiber can be estimated using Equation 3.13. Hughes and Jarzynski
(1980) studied the phase-lag in FO cable for varying properties of the jacket in a two
layer cable system and concluded that a jacket with small Poisson's ratio v and small
Young's modulus E will increase the sensitivity of the fiber. Such jacket material
tends to have larger axial strain than the silica core for a given pressure and pulls the
core along thereby enhancing the axial strain in the silica core for the same pressure.
Hughes and Jarzynski (1980) showed that the sensitivity increases with the jacket
thickness and reaches an asymptotic value. For a thick teflon jacket (jacket radius >
10 x core radius) the sensitivity increases asymptotically to a factor of 30.
We now relate the strain in the formation to the phase-lag measured by the cable
in the borehole fluid by following two steps: First, we estimate the pressure in the
borehole fluid due to incident plane-waves using the borehole model in Section 3.5.2.
We then use the pressure in the borehole fluid as a boundary condition in Equation
3.23 to estimate the strains e! 02 , f4") in the fiber core. Following Equation 3.13, the
phase-lag is given by
= #
(1~ -P12?%E0)
101
-
(P11 + P12)IE4)
(3.24)
In order to compare the phase-lag for different cases, we define the non-dimensional
quantity strain sensitivity of phase-lag as
2
I
EO
I=I(1
-
2
2
(0)
)
'Eic
2
(0)
n(P11 + P12) -"
2
'Einc
(3.25)
where KEine is the strain amplitude of the incident P-wave. Following the formulation
in Section 3.5.1, 1Einc = W2 /a. We take pi1 = 0.113, P12 = 0.252 and n, = 1.47. Note
that IcincI
"1 = 1 when axial strain in the fiber core is equal to the strain amplitude of
the incident P-wave and if the photo-elastic effect is neglected. Usually, the strain in
the fiber core is lower than the strain amplitude of the incident wave due to borehole
effects.
We study two simple cable models: 1) a two layer cable and 2) a three layer
cable. The two layer cable comprises of an inner silica core (E = 73 GPa,v = 0.1702)
of diameter 125 p m and an outer Teflon jacket (E = 3.06 GPa , v
=
0.317) of
diameter 1/4 inch. The three layer cable has an additional steel layer (E = 190 GPa
, v = 0.305) of thickness 0.028 inch. For a single mode fiber the silica core diameter
is about 10 pm and the cladding diameter is about 125 p m. The cladding is usually
made of silica but doped to have a lower refractive index and thus has the same
mechanical properties as the core. For modeling strain we treat them together as a
125 p m silica core.
Figure 3-14 shows the strain sensitivity of the two layer cable when installed in the
borehole fluid. Strain sensitivity is shown for open and cased boreholes in both hard
and soft formations. For each case we show the total sensitivity given by Equation
3.25 as well as the individual contribution of axial strain and radial strain to the
phase-lag given by the absolute values of the first and second terms in the equation,
respectively. When both axial and radial strains have the same sign, radial strain
tends to reduce the total sensitivity and vice-versa. The net radial strain in the fiber
102
core is the sum of radial strain due to external pressure (same sign as axial strain)
and radial strain due to Poisson effect (opposite sign). In case of the two-layer cable
with Teflon coating, Poisson effect dominates due to the enhanced elongation caused
by Teflon. Compare Figure 3-14 with Figures 3-6 and 3-8. Strain sensitivity for Pand SV-wave incidence qualitatively follows the pressure in the borehole fluid. Even
though the pressure in the borehole fluid is much smaller than the stress amplitude
of the incident P-wave (Figures 3-6 and 3-8), the strain sensitivity is close to 1 due to
enhanced sensitivity caused by teflon jacket. In general, maximum strain-sensitivity
is at 900 incidence for P-waves and 450 incidence for SV-waves. Sensitivity is large for
SV-incidence in soft formation due to resonance in the borehole when the apparent
velocity of the incident SV-wave is equal to the tubewave velocity in the borehole.
Over all, strain sensitivity is dominated by the axial strain in the fiber.
Figure 3-15 shows the strain sensitivity of the three layer cable when installed
in the borehole fluid. This is a more realistic scenario since most downhole cables
have metal jackets to provide strength to the cable and protect it from downhole
environment. Similar to the two-layer cable, sensitivity is shown for cable installed
in open and cased boreholes in both hard and soft formations. The strain sensitivity
decreases by a factor of 20 since the stronger metal jacket does not allow the elongation
of the inner Teflon jacket and fiber core. Since the axial elongation is small, radial
strain is caused mostly due to the external pressure and this further reduces the strain
sensitivity. As can be seen from the strain sensitivity plots, the strain in the fiber core
is about 2 orders of magnitude less than the strain in the formation. Thus, the phase
lag measured by the DAS cable in borehole fluid is sensitive to the cable design. The
sensitivity can be increased or decreased based on the design of the optical cable.
103
3.6.2
Coupling in solid
Now we consider the effect of cable design when the FO cable is cemented outside
the casing. When the cable is perfectly bonded with the formation, we require that
the axial displacement is continuous across the cable and formation interface. As
a result, the axial strain in the cable is continuous across the interface and is the
same in the formation and all the layers of the FO cable (iE
= c/4""))
under the
plane strain assumption. For a plane wave incident at an arbitrary angle 6, the stress
acting on the cable is not radially symmetric. We approximate the mean stress in
the horizontal plane to represent the radial stress acting on the cable. Hence, at the
cable surface (r = rM) we require
M
= (a
"+ o
)
h
"o
are
radial and tangential stresses in the formation.
For the case when the FO cable is cemented outside the casing, we relate the
strain in the formation to the phase-lag measured in two steps. We first solve for
the radial, tangential stresses and the z-strain at the borehole casing-cement interface
following Section 3.5.3 and then apply the above discussed boundary conditions to
the coupling problem to obtain the strain in the fiber-core and use Equation 3.24 to
estimate phase-lag. Figures 3-16 and 3-17 show the strain sensitivity of phase-lag for
the two-layered cable and the three-layered cable, respectively. These figures show
strain sensitivity for P- and SV-wave incidence in both hard and soft formations. In
general, the strain sensitivity is larger for a cable installed in the cement as compared
to a cable installed in borehole fluid.
In particular, when the cable has a metal
jacket, cable installed in the cement is about 40 times more sensitive than the cable
in the borehole fluid. Also, the strain sensitivity is comparable for cable with and
without a metal jacket when installed in the cement as opposed to when installed in
borehole fluid. This is due to the difference in the coupling mechanism when in solid
as opposed to fluid. The contribution of the radial strain to the measured phase-lag
is small and it may add positively or negatively to the phase-lag. The radial strain in
104
the fiber caused by the Poisson effect is opposite in polarity to the axial strain and
adds positively to the total phase-lag. However, the component of radial strain due
to the external radial stress adds negatively to the phase-lag when the radial stress is
in phase with the axial strain and vice-versa. For P-wave incidence, the radial stress
is in phase with the axial strain and adds negatively to the phase-lag. At small angles
of incidence, when radial stress is small and axial strain is large, the Poisson effect is
largest and phase-lag due to radial strain is positive. At close to normal incidence,
when the radial stress is large and-the axial strains are small, phase-lag due to the
radial strain is negative. We can observe this transition in Figure 3-16. For the cable
with metal jacket (Figure 3-17), the radial stress is shielded by the metal jacket and
we mostly see a positive contribution from the Poisson effect. For SV-wave incidence,
the axial strain and the radial stress are 1800 apart and the radial strain due to both
the Poisson effect and the external radial stress contribute positively to the phase-lag
(see Figures 3-16 and 3-17). The kinks in Figures 3-16a and 3-17a at 6 = 46.50, 37.4'
and 64.1' correspond to PP, SS, SP critical refractions at the casing-cement interface.
The kink at 6 = 52.40 in Figures 3-16b and 3-17b is due to the resonance in borehole
fluid at that incidence angle.
In summary, a cable cemented outside the casing is more sensitive to the strain
in the formation than a cable that responds to the pressure in the borehole fluid.
Though the sensitivity of the cable in the borehole fluid can be increased by choosing
suitable jacket material, analysis of the results from the three layer cable shows that
for most practical cases i.e., when a metal jacket is present, DAS should not be able
to record good quality data if it responds to just fluid pressure. We believe that
coupling of FO cable to the borehole wall is important when the cable is hung in
the borehole fluid. When the cable is cemented, cable design has negligible effect on
DAS measurements.
Field studies by Follett et al. (2014) confirm the same. The
sensitivity to P-waves is maximum at grazing incidence and is negligible at normal
105
incidence when the cable is in the solid. When the cable responds to the pressure
in the borehole fluid, the sensitivity is maximum at normal incidence. Sensitivity
to SV-waves is zero at normal and grazing incidence and maximum at 450 for both
the cases when the cable is deployed in the borehole fluid or cemented outside the
casing. However, we expect the sensitivity pattern for a cable in the borehole fluid to
be similar to the cemented case when FO cable is well coupled to borehole wall.
3.7
Considerations for Time-lapse DAS VSP
DAS is a promising tool for reservoir monitoring. However, in order to reliably monitor the changes in the formation, we need to account for other factors that may affect
time-lapse DAS measurements. In particular, we study the effect of changes in the
refractive index of the fiber core, changes in the elastic properties of the cable layers
and changes in cement properties on time-lapse DAS measurements.
Changes in refractive index
Consider two time-lapse VSP surveys at different pressure and temperature conditions
(P1 , T1 ) and (P2 , T2 ). Let the refractive index of the fiber core at these conditions be
nc1 and nc2, respectively. We assume that the background pressure and temperature
are constant during each survey and the phase-lag in the fiber is caused by dynamic
strain due to the incident waves. From Equations 3.10 and 3.13, the optical phase-lag
measured by DAS in each case can be written as
A
=
2ir2
L
1
27rnc2 L 2
A(23 2
(1
2
)__ zi
()(1
2
zz2
2
-2
2
P
(P1
+
12)(rr)
P12)Err2
,
assuming ExX1 =
Eyyl
,
assuming Exx2 =
Eyy2 = Err2
= Err1
(3.26)
106
Between the two surveys the time-delay
Tg
between the two pulses in the dual-pulse
COTDR is maintained constant. The gauge-length L in both surveys is related to
the velocity of light in the fiber and -rg by L = rgC/2 = rg/2nc. Thus, the ratio of
phase-lags from the two surveys can be written as
D2_ -
Ad1i
-
((1-P122
ncL1 ((1 _P12f 1 )Ezz
2 L2
nc1
T9 /2n
Ezz2
-, (1
~r
Errl cl
1
(P11 + P12)Err2)
(Pu +P12)Err)
-
_ 2z1
P12fl
2
+ P12)Err2)
r
+
(P11
when Ezz >>
P2n)
-
zz1
(1 -
c
-
12";2 )Ezz2
(
c2 Tg/2Lc2
2
-
12)Errl
or, 1rr
(3.27)
+2fl2i)'
2
(3.28)
, when Err > Ezz
The effect of refractive index changes on the time-lapse measurements is given by the
12n 2
)/(I
- P12"l.
) and n 2 /n2 1 . Taking nei = 1.47 and dnc/dT = 10- 5 K- 1
,
factors (1-
and for a 50'C rise in temperature, n, 2 = 1.4705,
(IPl
-2)/(Pl2ni)
2
= 1-2.5x 10-4
and n 2 /n2 1 = 1+7 x 10- 4 . Similarly, taking the bulk modulus of silica as 35 GPa, the
volumetric strain E for increase in pressure by 10 MPa is -2.9 x 10-4, and the change
in refractive index is given by -jic
)(u + 2 P12) = 9.5 x 10- 5 . Thus, for an increase
in pressure by 10 MPa, n, 2 = 1.4701, (1
-
Pi2 2 c 2
)/(1
-
P12
2
l)
- 5
x 10-5 and
nc2/n1 c= 1 + 1 x 10- 4. It is clear from the above estimates that the refractive index
difference between the two time-lapse surveys has negligible effect on the time-lapse
phase-lag measurements.
Changes in cable elastic properties
In Section 3.6, we showed that the strain in the fiber core is coupled to the formation
through the multiple layers of the FO cable. It is possible that the elastic properties
of the cable layers may change with time due to changes in pressure or temperature
107
in the reservoir. Especially, the elastic properties of polymer and rubber layers are
susceptible to temperature variations. As a result, one may observe different strains
in the fiber core for the same strain in the formation. In most reservoirs, we expect
variation in temperature over a range from 20'C to 150'C. Elastic properties of metals
and silica don't vary much over this range. However, the elastic modulus of Teflon
&
decreases by a factor of 5 from 20'C to 150'C (Rae & Dattelbaum, 2004; Rae
Brown, 2005). We study the effect of elastic property changes in Teflon/polymer layer
by analyzing the strain sensitivity of phase-lag (/#5n)
as a function of Young's
modulus and Poisson's ratio of the Teflon/polymer layer for both the two-layered and
three-layered cables described in Section 3.6.1. We plot the percentage change in the
strain sensitivity as the Young's modulus and Poisson ratio are perturbed from the
reference values of 3.06 GPa and 0.317, respectively.
Figure 3-18 shows the change in strain sensitivity for FO cable installed in the
borehole fluid. Since the FO cable is coupled through the pressure in the borehole
fluid, the change in strain sensitivity due to perturbation in cable elastic properties
is the same for both P-and SV-wave incidence and for all angles. Figure 3-18a shows
the change in strain sensitivity for the two-layered cable without a metal jacket.
The strain sensitivity changes by several hundred percent as the Young's modulus
is reduced by a factor of 5 (over the possible range of temperature variation). For
the three-layered cable with a metal jacket (see Figure 3-18b), the sensitivity is less
susceptible to Teflon property changes.
However, it still changes on the order of
several tens of percent. Thus, temperature dependent elastic property variation of
polymer should be accounted for when the FO cable responds to the pressure in the
borehole fluid. When the FO cable in the borehole fluid is strongly coupled to the
borehole wall, we expect the response to be similar to the cemented case. Figures
3-19 and 3-20 show the change in strain sensitivity for an FO cable cemented outside
the casing for P- and SV-wave incidence, respectively. For both the cases, sensitivity
108
changes are less than 1% over the range of interest. The effect of elastic property
changes in Teflon or Polymer layers on time-lapse DAS VSP can be ignored when the
cable is cemented outside the casing.
Changes in cement properties
We have shown that refractive index changes and cable elastic property changes can
be ignored when the cable is cemented outside the casing. We now look into the
effect of elastic property changes of the cement when the cable is installed in the
cement. Cement usually strengthens with time and the properties may vary between
the time-lapse surveys. Property changes in cement are more common during timelapse monitoring of hydraulic fracturing where the cement may be weakened due to
damage during stimulation. We vary P- and S-wave velocities of the cement layer as
a % of the reference cement properties (a = 2823 m/s and
f
= 1792 m/s) and study
the change in strain sensitivity of phase-lag. We consider the three-layered cable with
a metal jacket for this analysis.
Figure 3-21 shows change in strain sensitivity for
both P- and SV-wave incidence in hard and soft formations. At 100 Hz, the change
in strain sensitivity is less than 1% for even a change in cement properties as much
as 30%. However, at 500 Hz, the effect of cement starts to become significant at
large perturbations in cement properties. In general, the effect of cement is more in
a soft formation (Pierre shale). Overall, property changes of cement don't have any
significant effect for frequencies below 500 Hz.
We studied the effect of changes in refractive index, elastic properties of the cable
and cement layer on time-lapse DAS VSP data. We showed that these effects are
negligible when the cable is cemented outside the casing. For an FO cable in borehole
fluid, the elastic properties of the cable are important if it primarily responds to the
fluid pressure and not important if it is strongly coupled to the borehole wall.
109
3.8
Conclusions
In this chapter, we presented an overview of DAS and described different implementations of COTDR. We discussed the advantages and limitations of DAS and related
DAS response to geophone response. The major contribution of the chapter is to
study the effect of the borehole, placement of the FO cable, and the cable design
on the DAS VSP measurements. This is very important for providing guidelines for
future surveys and improving DAS VSP data quality. We modeled P- and SV- wave
incidence on a multi-layered borehole and analyzed the sensitivity of DAS to the
wave-field in the formation for two FO cable placement configurations: 1) hung in
the borehole fluid and 2) cemented outside the casing. In addition, we compared the
DAS response in a hard and soft formation as well. We studied fiber coupling with
the formation using multi-layered cable models. Finally, we quantified the effect of
pressure and temperature dependent refractive index changes, as well as FO cable
and cement elastic property changes on time-lapse DAS VSP.
We summarize the major findings and recommendations of this chapter below:
" The physical quantity measured by DAS is the axial strain or strain-rate in
the fiber averaged over a gauge-length. When two consecutive time-steps are
compared to estimate phase-lag, it represents strain-rate. However, when phaselag is estimated with respect to a reference time, we measure strain.
" Since DAS measures average strain over a gauge-length, it is identical to applying a SINC filter in the frequency domain. As a result, higher-frequencies are
attenuated and the spectrum is distorted. It results in notches in the spectra at
discrete frequencies when the gauge-length is an integral multiple of the apparent wavelength along the FO cable axis. Smaller gauge-length preserves higher
frequencies while larger gauge-length enhances signal-to-noise ratio. Though
DAS can record up to very high frequencies
110
(~
20 KHz), the gauge-length puts
a practical limit on the maximum frequency that can be recorded with fidelity.
" When an FO cable is buried in an infinite medium, it is sensitive to P- and SVwaves incident at an angle 6 from fiber axis as cos2 6 and sin 26, respectively.
DAS is similar to hydrophones in that it does not distinguish between the
polarity of up and down-going waves. We showed that DAS (measuring strainrate) is identical to the difference in data recorded by two velocity geophones
that are separated by a gauge-length.
" FO cable in borehole fluid: When the FO cable is hung in the borehole fluid
and responds to the fluid pressure, the sensitivity is governed by the borehole
reception pattern.
In this configuration, DAS is most sensitive to P-waves
incident normal to the borehole (unlike DAS cemented outside casing) and to
SV-waves incident at 45'. Borehole effects are significant when the FO cable
responds to the pressure in the borehole fluid and we observe S-wave resonance
in a soft formation and P-wave shielding in a cased borehole.
However, the
radial and azimuthal placement of the fiber has a negligible effect on DAS
measurements for frequencies below 500 Hz. When the FO cable in the borehole
fluid is strongly coupled to the borehole wall, we expect the results to be similar
to when the FO cable is cemented outside the casing.
* FO cable cemented outside casing: When the FO cable is cemented outside
the casing it measures the axial strain in the formation and the sensitivity follows
cos2 6 and sin 26 dependency for P- and SV- wave incidence, respectively.
In
this configuration, DAS is most sensitive to P-waves incident parallel to the
borehole and to SV-waves incident at 45*. The impact of the presence of the
borehole on DAS response is negligible for frequencies below 500 Hz in a hard
formation. However, sensitivity decreases with increasing frequency in a soft
formation.
There is no strong azimuthal dependence of the response on the
111
placement of the FO cable for frequencies below 500 Hz in a hard formation
and below 300 Hz in a soft formation.
" Given the sensitivity dependence on angle of incidence, DAS may not be as
good a tool for microseismic monitoring as compared to geophones.
" The silica fiber core is coupled to the formation through multiple layers of
the FO cable. Cable design is important when the FO cable is placed in the
borehole fluid and responds to the pressure in the borehole fluid. The sensitivity
can be enhanced by choosing polymer jackets with low Young's modulus and
low Poisson's ratio. However, when the cable is cemented outside the casing,
cable design doesn't significantly effect the sensitivity of DAS measurements.
We expect the same when the FO cable is in the borehole fluid but strongly
coupled to the borehole wall.
" When DAS is installed in the borehole fluid and responds to fluid pressure,
sensitivity for P-waves is weakly dependent on incidence angle (at least in soft
formations) as compared to DAS cemented outside the casing, and gives better
coverage with incidence angle. However, for an FO cable with a metal jacket,
strain sensitivity in the borehole fluid is, in general, lower by a factor of 20 as
compared to when cemented outside the casing. We require non metal jackets,
which may not be practical, to enhance the sensitivity to fluid pressure in the
borehole.
Increasing the coupling between the cable and borehole wall may
produce better sensitivity allowing a cheaper and quicker DAS VSP deployment
in the borehole fluid.
* Refractive index changes of the fiber between two time-lapse surveys do not
effect the time-lapse measurements. For a cable installed in the cement, changes
in elastic properties of the cable layers and the cement between the time-lapse
surveys do not effect the time-lapse measurements. However, elastic property
112
changes of cable layers significantly effect the time-lapse measurements when
the cable is in the borehole fluid and responds to fluid pressure. For the case
when the FO cable is in the borehole fluid but strongly coupled to the borehole
wall, changes in coupling with the wall is a concern. Thus, cementing the FO
cable is a recommended practice for time-lapse DAS VSP.
113
3.9
Figures
i-I
Receiver spacing
Optical Fiber
Ueteclor M
Interferometer
Light-Box
Gauge-Ler
Gauge-Length, L
---0
depth = t/2C
Phase-lag
S1+S2
Un-strained
4
Strained
oc AL/L
time
S24
Figure 3-1: A schematic description of the various components of the DAS system.
The phase-lag between the beat signals (S1+S2) formed from two scattering points
in the fiber in the unstrained (blue) and strained (red) state is proportional to the
strain in that section of the fiber occurred between the two sampling times.
114
T
.T
.A
AOM
AO:coSwit ch
n
Photo-detector
A
r
e
L
A Digitization
-B
AOM: Acousto Optic Modulator
Sensing Section
LO: Local Oscillator
of Fiber
(a)
Laser
-em
Switch
w
L
O
T
am rge IaDelay-Loop
Interferometer
Photo-detector
-A
L
Digitization
AOM: Acousto Optic Modulator
LO: Local Oscillator
Sensing Section
of Fiber
(b)
T
Sour r
+witch
T
W
AOM
WLO
tI
Photo-dete ctor :L
rDigitizationI
AOM: Acousto Optic Modulator
LO: Local Oscillator
- B
Sensing Section
of Fiber
(C)
Figure 3-2: Three different implementations of COTDR are shown: (a) Dual-Pulse
system (b) Single-Pulse system (c) Single-Pulse with Local Oscillator. The figures
are adapted from Hartog et al. (2013).
115
0
0
330
30
60
30z-axi
24
-Vertical
-DAS
Geophone
210
z-ais.
60
.0406
.
/
27
20
. .
30
30
20.4060 1
--- 90
27 -
-90
330
24
20
Vertical Geophone
-DS210
- DAS
-
150
180
(a) P-wave incidence
180
150
(b) SV-wave incidence
Figure 3-3: Sensitivity of a vertical component geophone and DAS as a function of
angle of incidence from z-axis. Dotted lines indicates negative polarity.
Z-axis
Formation
Borhol
6
K
Y-axis
X-axis
K
Z-axis
X-axis
Incident Plane-wave
Figure 3-4: Schematic diagram of the layered borehole model
116
1
0.8
0.6
0.4
-
0.2
0
1
2
3
(L / ) cos8
4
5
Figure 3-5: Averaging strain over a gauge-length is equivalent to applying a sinc filter
in the frequency domain. The amplitude response of the filter is shown as a function
of the wave-length.
0.65
0.12
0.6
'
15
'
'
'
30
45
60
Angle of incidence 8
75
0.55
-
0.5
.
--
0 .1
--8---
0.0
_
-
0.45
-1000
0.41
0
90
(a) P-wave incidence in Berea Sandstone
0.1 2
-4-- 50 Hz
- -- 100 Hz
0
'
0
0
-e50 Hz
100 Hz
--- 00 Hz
-1000 Hz
.
0.06
0.04
0.02-
15
30
45
60
Angle of incidence 8
-
0
500 Hz
Hz
75
90
(b) P-wave incidence in Pierre Shale
50 Hz
100 Hz
500 Hz
1000 Hz
50 Hz
Hz
500 Hz
L-0H
--1000 Hz
---
-100
1.5|
-z
0.0 6
0r
1
0.0 4
0.5
0.0 2
0
15
30
45
60
Angle of incidence 8
75
90
0
(c) SV-wave incidence in Berea Sandstone
15
30
45
60
Angle of incidence 8
75
90
(d) SV-wave incidence in Pierre Shale
Figure 3-6: Borehole reception pattern for P- and SV-wave incidence on an open
borehole. The amplitude ratio of fluid pressure at borehole center (IPl) to the stress
due to incident P-wave (|o-i|), away from the borehole, is plotted against the incidence angle 3 for different frequencies and for both hard (Berea Sandstone) and soft
(Pierre Shale) formations. Note differing amplitude scales for each plot. These plots
are reproduced from Peng et al. (1993).
117
1.1
105*
120*
750
90*
-7
-
-+-- 50 Hz
100 Hz
500 Hz
1000 Hz
60' -
0
135
105*
0*
180
105*
75*
90*
120'
135*
02
30*
94-15*
0*
180
(r=O) I
-060 -
(Pb Vwaei n bi (r=)
(b) P-wave incidence in. Pierre Shale
50 Hz
100 Hz
500 Hz
1000 Hz
.1
105*
75*
135*0
300
165
90*
120*
- 450
150*
1000 Hz
45*
165 ..
(a) P-wave incidence in Berea Sandstone
1.1
500 Hz
1500
15*
IPb(r=r)/Pb
-
135*
30*
165
50 Hz
100 Hz
60 -
120*
45
150*
900 0275*
----
45*
150*
15*
0*
180
-+- 50 Hz
100 Hz
500 Hz
1000 Hz
60' -
IPb r=r)/Pb b(r=O) I
165
30*
-
415*
00
1
Pb (r=rb/bb(r=0)l
(c) SV-wave incidence in Berea Sandstone
(d) SV-wave incidence in Pierre Shale
Figure 3-7: Amplitude ratio of pressure at the wall of an open borehole (Pb(r = rb))
to that at borehole center (Pb(r = 0)) is plotted against the azimuth 0 of the receiver
for different frequencies and for P- and SV-wave incidence (6 = 450) in hard (Berea
Sandstone) and soft (Pierre Shale) formations. Azimuth is 180' in the direction of
the wave incidence.
118
0.08
0.12
0.1
0.06-
0.08
0.04
0~ 0.06
-
0D
50 Hz
9
- -100 Hz
- -500 Hz
- -1000 Hz
-3-
0.02
0
15
30
45
60
Angle of incidence 5
75
0~
U.
0
(a) P-wave incidence in Berea Sandstone
0.0 8
15
-0
loHz
-z
30
45
60
Angle of incidence S
75
90
(b) P-wave incidence in Pierre Shale
-e---
50 Hz
100 Hz
-- 500 Hz
-1000 Hz
0.0 6 0
-
0.02
90
-e-50 Hz
- 00 Hz
-
0.04
-8- 50 Hz
-100 Hz
-500
Hz
1000 Hz
0.8
0.6
0.04-
-- 8
0.4
0.0 2
0
0.2(
15
Nu
30
45
60
Angle of incidence S
75
0
90
(c) SV-wave incidence in Berea Sandstone
15
30
45
60
Angle of incidence S
75
90
(d) SV-wave incidence in Pierre Shale
Figure 3-8: Borehole reception pattern for P- and SV-wave incidence on a cased
borehole. The amplitude ratio of fluid pressure at borehole center (IPbl) to the stress
due to incident P-wave (jauc|), away from the borehole, is plotted against the incidence angle 3 for different frequencies and for both hard (Berea Sandstone) and soft
(Pierre Shale) formations. Note differing amplitude scales for each plot. The plots
are reproduced from Peng et al. (1994).
119
1
---P-wave
0.80.6
_
---
S-wave
1.2-
--
_.
0.4
0.2
0
0
P-wave
SV-wave
15
30
45
60
Angle of incidence 8
75
90
(a) Berea Sandstone
0.6
0.4
0.20
0
15
30
45
60
Angle of incidence 8
75
90
(b) Pierre Shale
Figure 3-9: Axial strain sensitivity for DAS buried in an infinite homogenous elastic
solid. The amplitude ratio of strain in the z-direction (|6j 1) to the total strain due to
incident P-wave (leicI) is plotted against the incidence angle 8 for different frequencies
and for P- and SV-wave incidence in (a) hard (Berea Sandstone) and (b) soft (Pierre
Shale) formations. The maximum sensitivity for SV-wave incidence is proportional
to 2
2,3
120
--0.8
-
-
0
50 Hz
-e
100 Hz
500 Hz
1000 Hz
-
0.6
0 .4
0.4
0.2
0.2
n.
0
15
30
45
60
Angle of incidence 8
75
U
90
-100
-500
-100
0.6
.
15
30
45
60
Angle of incidence 8
75
90
(b) P-wave incidence in Pierre Shale
50 Hz
Hz
Hz
0 Hz
50
0.4
-----
-50 Hz
-100
Hz
--500 Hz
1000 Hz
1.21
-
,
-e-
___
-00H
-00H
0
(a) P-wave incidence in Berea Sandstone
s,
0 HzHz
100
00 Hz
500
Hz
S1000
.
0.8
0.8
0
0.60.4
0.2
0.2
0
15
30
45
60
Angle of incidence 5
75
0
0
90
(c) SV-wave incidence in Berea Sandstone
15
30
45
60
Angle of incidence 8
75
90
(d) SV-wave incidence in Pierre Shale
Figure 3-10: Axial strain sensitivity for DAS installed in the cement outside casing.
The amplitude ratio of strain in the z-direction at the casing-cement interface (|(,,j)
to the strain due to the incident P-wave (I inc ) is plotted against the incidence angle 6
for different frequencies and for P- and SV-wave incidence in hard (Berea Sandstone)
and soft (Pierre Shale) formations.
121
900 02750
.
1350
50 Hz
100 Hz
500 Hz
1000 Hz
105*
450
1500
165
10
135*
(b) P-wave incidence in Pierre Shale
-0- 50 Hz
-100 Hz
500 Hz
1000 Hz
60< -
105*
120*
135*
150*
30*0
165 ...
0
15
00
45*0
150*0
15*0
1100
0
+10
(a) P-wave incidence in Berea Sandstone
275*0
3
165 .
0*0
900
450
150*
150
105*
02750
135*
30*0
1200
90
2120
-4-- 50 Hz
100 Hz
- - - 200 Hz
600 - - - 300 Hz
*
1050
120*
-460' --
0*
1.25
75*
90*
1J.5
-0- 50 Hz
100 Hz
-- - - 200 Hz
60* - - - 300 Hz
45*
30*
165
15*
180
0*
(d) SV-wave incidence in Pierre Shale
(c) SV-wave incidence in Berea Sandstone
Figure 3-11: Ratio of the strain I zz(6) at the casing-cement boundary for arbitrary
azimuth to that at zero azimuth |ezz(O = 00)1 is plotted against the azimuth 0 of
the receiver for different frequencies and for P- and SV-wave incidence (6 = 450) in
hard (Berea Sandstone) and soft (Pierre Shale) formations. Azimuth is 1800 in the
direction of the wave incidence.
122
5
7
6
4
1 Fiber core
2 Fiber cladding
3 Coatings & polymer
buffer tube
4
5
6
7
Aramid fiber filling
Inner steel tube
Teflon buffer
Outer inconel tube
Figure 3-12: A schematic diagram of a typical FO cable cross section. A typical FO
cable has multiple optical fibers packaged inside metal or plastic jackets.
FO cable outer jacket
Fiber silica core
m=0
m=1
m=M
Orr
ao
rM
Boundary Conditions
Cable in Fluid
Cable in solid
Orr = -Pf
Ezz=
M
Orr = (Oxx +Oyy )/2
EZ=
=....=Ezz
Ezz =....=Ezz
E
M
-Yam=Ia 1 mz
GrrI= Grr|; Ur= Ur|
r=rm
r=rm,
r=r.
m=0,1,..,M-1
r=r.,
Figure 3-13: A schematic diagram of the modeled FO cable cross section.
123
0.5r
--
0.4 .
Total Sensitivity
0.5
Sensitivity due to axial strain
-Sensitivity
due to radial strain
1
0.4
0.3
0.3
-
-0-0-
-
0.2
4.
~
-
l
-
-
0.2
x
0.1
-
-Total Sensitivity
Sensitivity due to axial strain
Sensitivity due to radial strain
0.1
n-
0
20
40
60
Incidence angle, 5
80
0
(a) Open borehole in Berea Sandstone
0.5r
0.4
-
0.1
0.08
0.3
0.06
0.2
0.04
N
40
60
Incidence angle, 8
80
(b) Open borehole in Pierre Shale
Total Sensitivity
Sensitivity due to axial strain
Sensitivity due to radial strain
0.1
20
Total Sensitivity
Sensitivity due to axial strain
Sensitivity due to radial strain
0.02
N
N
N
0
U.
0
20
40
60
Incidence angle, S
80
0
(c) Cased borehole in Berea Sandstone
20
40
60
Incidence angle, 8
80
(d) Cased borehole in Pierre Shale
Figure 3-14: Strain sensitivity of two-layered cable installed in borehole fluid is plotted
against angle of incidence for both P-wave (solid lines) and SV-wave (dotted lines)
incidence at 100 Hz. Sensitivity is shown for open and cased boreholes in hard (Berea
Sandstone) and soft (Pierre Shale) formations.
124
0.025
0.02 .
-Total Sensitivity
Sensitivity due to axial strain
- - Sensitivity due to radial strain
-
0.05
0.04
0.015
-0-
0.01
0.02
0
20
40
60
Incidence angle, S
0.01
-
.
0.005
0if
0
80
(a) Open borehole in Berea Sandstone
0.012
-
20
80
Total Sensitivity
Sensitivity due to axial strain
Sensitivity due to radial strain
0.01
0.008
0.01
40
60
Incidence angle, 8
(b) Open borehole in Pierre Shale
Total Sensitivity
Sensitivity due to axial strain
Sensitivity due to radial strain
0.014
_0-
ty
Sen tal Sensdito
Sensitivity due to axial strai n
Sensitivity due to radial stra in
0.03
N'
-
n
-
11
-
- -- - - - -
0.006
0.008
0.006
~
-
0.004
0.004
0
- I
0.002
0.002
20
40
60
Incidence angle, S
80
0
(c) Cased borehole in Berea Sandstone
20
40
60
Incidence angle, S
80
(d) Cased borehole in Pierre Shale
Figure 3-15: Strain sensitivity of three-layered cable installed in borehole fluid is
plotted against angle of incidence for both P-wave (solid lines) and SV-wave (dotted
lines) incidence at 100 Hz. Sensitivity is shown for open and cased boreholes in hard
(Berea Sandstone) and soft (Pierre Shale) formations.
125
-
-
0.8-
Total Sensitivity
Sensitivity due to axial strain
Sensitivity due to radial strain
1
-
Total Sensitivity
-
Sensitivity due to axial strain
Sensitivity due to radial strain
I
0.8[
0.6-
-
1
.-
0.6
0.4
<
0.4 F
*~~N
0.2
0.2
0
0
20
40
0
80
60
Incidence angle, 8
0
20
40
60
80
Incidence angle, 5
(a) Berea Sandstone
(b) Pierre Shale
Figure 3-16: Strain sensitivity of two-layered cable installed in cement is plotted
against angle of incidence for both P-wave (solid lines) and SV-wave (dotted lines)
incidence at 100 Hz. Sensitivity is shown for hard (Berea Sandstone) and soft (Pierre
Shale) formations.
1
_
-
0.8
0.6
Total Sensitivity
Total Sensitivity
du
Sensitivity due to axial strain
1
Sensitivity due to axial strain
Sensitivity due to radial strain
Sensitivity due to radial strain
0.8
orails
0.6
-
0.4
0.2
(I0
20
40
60
Incidence angle, 8
80
0
20
60
40
Incidence angle, S
80
(b) Pierre Shale
(a) Berea Sandstone
Figure 3-17: Strain sensitivity of three-layered cable installed in cement is plotted
against angle of incidence for both P-wave (solid lines) and SV-wave (dotted lines)
incidence at 100 Hz. Sensitivity is shown for hard (Berea Sandstone) and soft (Pierre
Shale) formations.
126
10
10
0
0
0
~ 0 >-500
0
0C
2
10
0
0.1 0.15
0.1
0.15
0.2
0.2
0.25
0.3
0.35
0.4
0.25
0.3
0.35
0.4
Poisson's Ratio
0.1
(a) Two-layered cable
0.15
0.2
0.25
0.3 0.35
Poisson's Ratio
0.4
(b) Three-layered cable
Figure 3-18: Percentage change in strain sensitivity (A#/Occ,) for a cable installed in
borehole fluid as the elastic properties of the Teflon layer are varied from the reference
properties E = 3.06 GPa and v = 0.317. The change in sensitivity is the same for
both P, SV-wave incidence at any arbitrary angle of incidence.
0.
..
10
@.'
0
a-
10
0,
2 10
2 10
0,
.5
0
0.
1-1L
0.1
0.15
0.2
0.25
0.3
0.35
0.4
1
Poisson's Ratio
(a) Two-layered cable
0.15
0.2
0.25 0.3
0.35
Poisson's Ratio
0.4
(b) Three-layered cable
Figure 3-19: Percentage change in strain sensitivity (AO/OEjc) for a cable cemented
outside the casing as the elastic properties of the Teflon layer are varied from the
reference properties E = 3.06 GPa and v = 0.317. The change in sensitivity is shown
for P-wave incidence in Berea Sandstone at 6 = 00, 0 = 00 and frequency 100 Hz.
127
S10
0
0
(jL
10
r
0 0
-o
2 10
C.
0
0
0. 1
b,\
10
0)
0.15
0.2
0 0
0.25 0.3 0.35
Poisson's Ratio
IV
0.4
0.1
(a) Two-layered cable
0.15
0.2
0.25 0.3
0.35
Poisson's Ratio
0.4
(b) Three-layered cable
Figure 3-20: Percentage change in strain sensitivity (AO/#Ocj,) for a cable cemented
outside the casing as the elastic properties of the Teflon layer are varied from the
reference properties E = 3.06 GPa and v = 0.317. The change in sensitivity is shown
for SV-wave incidence Berea Sandstone at 6 = 450, 6 = 00 and frequency 100 Hz.
3
-
Berea sandstone, 100 Hz
Berea sandstone, 100 Hz
- - - Berea sandstone, 500 Hz
-- - Pierre shale, 100 Hz
Pierre shale, 500 Hz
1
- - - Berea sandstone, 500 Hz
- - - Pierre shale, 100 Hz
...
...... - Pierre shale, 500 HzC
0.5 --
S-1
0 -2
-30
--
-'-
000
-
CU
-
0
).-
-20
-10
0
10
% Change in cement velocities
(a) P-wave incidence at
20
-30
6 = 00 and 0 = 00
-20
-10
0
10
% Change in cement velocities
20
(b) SV-wave incidence at 6 = 450 and 0 = 00
Figure 3-21: Percentage change in strain sensitivity as the cement properties are
varied. Both P-wave velocity and S-wave velocity of the cement are simultaneously
perturbed as a percentage of the reference cement properties (a = 2823 m/s and
#3 =1792 m/s).
128
Chapter 4
Time-lapse Monitoring of
Hydraulic Fracturing using DAS
4.1
Introduction
Hydraulic fracturing is a common method for developing low-permeability unconventional reservoirs. There is tremendous benefit in optimizing the parameters of
the hydraulic fracturing process, including such things as well-spacing, perforation
choices, stage height, injected fluids, and proppants. This optimization can be greatly
improved by making measurements on the hydraulic fractures as they are created,
and thus fracture monitoring methods form an important part of industry research.In
recent years, micro-seismic monitoring methods have been at the forefront to provide
estimates of the stimulated volume (SV) or the fracture dimensions based on the spatial extent of the micro-seismic cloud (Maxwell, Rutledge, et al., 2010). However it
is now widely accepted that stress perturbations can cause micro-seismic activity at
locations far from the hydraulic fracture (Maxwell et al., 2009) and also, large location uncertainty in individual micro-seismic events may also lead to estimates larger
than the actual SV (Maxwell, Underhill, et al., 2010). Estimates from micro-seismic
129
measurements may serve to be an upper limit rather than an exact representation of
the SV. In addition, a significant portion of the deformation may be aseismic and not
represented by the seismic activity (Das & Zoback, 2013). On the other hand, borehole diagnostics such as the temperature warm-back profile in the perforated interval,
tracing of placed proppants, and production logging, provide only near borehole fracture diagnostics (Ugueto et al., 2014).
Another approach that has been applied for many years is active seismic monitoring of hydraulic fracturing using down-hole geometries (eg. VSP geometry). Most
studies monitored the transmitted or scattered wave-field from a stimulated zone and
report shear-wave shadowing under pressurized conditions and little changes in the
P-wave field.
Time-lapse monitoring of explosive fracturing (Stewart et al., 1981;
Turpening, 1984) and hydraulic fracturing (Turpening & Blackway, 1984; Fehler et
al., 1982) of Antrim shale (Department of Energy sponsored test site in the Michigan
basin) is a well studied case. Stewart et al. (1981) analyzed P- and SH-waves recorded
in a monitoring well located within the shadow zone of a vertical ellipsoidal volume
of explosively fractured rock oriented perpendicular to the ray path.
They report
attenuation in P- and SH-waves as well as reduction in P- and S-wave velocities.
Turpening (1984) analyzed SH-waves recorded in a distant monitoring well oriented
parallel to the same fractured volume.
They report no observable changes in P-
and SH-waveforms, but identify SH to SV forward scattered energy after fracturing.
Turpening and Blackway (1984) and Fehler et al. (1982) study a hydraulic fracture
at the same site; the time-lapse data were collected while the fracture is pressurized
in order to be kept open. They report no observable changes in P- and SH-waves
recorded in a well such that rays propagate parallel to the fracture. However, SHwave shadowing is observed for wave paths that cross the fracture and the fracture
size was estimated using the diffracted energy. Wills et al. (1992) measured the crosswell transmission of P and shear waves during hydraulic fracturing in the Belridge
130
diatomite. Shear waves are attenuated (and phase shifted) at the beginning of the
shut-in period and recover within about an hour, in agreement with interpretations of
fracture closure during leak-off. They also observed reduction in the S wave velocity
and attribute it to opening of multiple micro-fractures. No significant effect is seen
on the (noisy) P arrivals. Meadows and Winterstein (1994) conducted an S-wave
transmission experiment with time-lapse VSP in a monitoring well and an S-wave
source on the surface. They detected both direct and scattered S-waves. Scattered
S-waves disappear one hour after the shut-in consistent with fracture closure. Shear
wave splitting is observed in the shear wave polarized perpendicular to the fracture.
However, the pre-stimulation wavelet appears after one hour. Liu et al. (1997) modeled diffraction from a fluid-filled crack based on the Kirchhoff approximation and
estimated fracture dimensions by applying it to data from Meadows and Winterstein
(1994). Ultrasonic laboratory experiments by Groenenboom et al. (1999); de Pater et
al. (2001) suggest that diffractions from fluid-filled fracture tips may be more important than previously thought and that S-waves are more sensitive to induced changes
than P-waves. Kaelin and Johnson (1999) injected air into a previously existing hydraulic fracture network in the field and report large changes in P wave amplitudes
but very small changes in travel times in a cross-well study using frequencies on the
order of 1 kHz. In summary, the studies mentioned above monitored the transmitted or scattered wave-field from a stimulated zone. Most studies report shear-wave
shadowing under pressurized conditions and little changes in the P-wave field.
A problem with VSP geometries used in previous studies is that geophones had to
be deployed in a suitably positioned observation well, as it would have been impractical to deploy them in the treatment well. Recent use of DAS for recording seismic
data has removed this difficulty because a fiber-optic (FO) cable can be installed in
the treatment well. In fact, treatment wells often have FO cables installed for nonseismic purposes such as connection to pressure and temperature gauges, Distributed
131
Temperature Sensing (DTS) and noise logging.
The same cable allows completely
non-intrusive seismic recording during treatment.
In this chapter, we describe an experiment where time-lapse seismic data were
recorded on a DAS fiber in a treatment well during a hydraulic fracture operation in a
tight gas field. The current experiment is markedly different from previous monitoring
attempts since the receiver array passes through the stimulated zone rather than
observing it from a distant monitoring well.
Given the field geometry (near offset
survey) and sensitivity of DAS to axial strain only, we only record P-waves in the
region of interest even though S-waves may be the most sensitive to changes due to
fracturing. However, we observe P-wave amplitude changes near the stimulated zone
and no significant time-shifts in the time-lapse data. We consider different factors,
both measurement related and formation changes, to explain the observed time-lapse
changes. We first describe hydraulic fracturing, followed by the field trial. We then
discuss data acquisition and pre-processing needed to prepare the DAS data for timelapse analysis. Next, we summarize the time-lapse observations and interpretation.
4.2
Hydraulic Fracturing
Hydraulic fracturing is the process of fracturing a low-permeability reservoir rock
using a pressurized fluid. Compared to the original rock, the stimulated formation
has a more permeable connection to the well. Stimulation is done after the borehole is
drilled, cased, cemented and perforated in the zone of interest. A well is hydraulically
fractured/stimulated in stages (selected zones that are stimulated), starting from the
bottom of the well and moving progressively up.
Before stimulating a particular
stage, a plug is placed in the borehole just below the stage to isolate the lower section
of the well (which has already been stimulated). Then perforations are made in the
zone to be stimulated, using a perforation gun that fires shaped charges through
132
the casing and cement. After perforating, frac-fluid mixed with proppants (typically
sand grains) is pumped at high pressures to initiate and propagate the fractures to
a desired extent. After injecting the desired quantity of proppant, the well is shut-in
and the pressure is allowed to slowly decrease. Once the desired zones are stimulated,
plugs for all the stages are drilled through to allow production from all the stages.
4.3
Field Experiment
The field experiment featured time-lapse monitoring of hydraulic fracturing with DAS
in a treatment well.
In addition to time-lapse DAS VSP, other monitoring tools
such as DTS, DAS noise logging, production logging, and non-radio active tracing of
proppants were used to study near-borehole changes caused by the stimulation. DAS
is expected to provide stimulation diagnostics away from the borehole. We do not
have access to logs other than DTS. The scope of the chapter is limited to a field-trial
of DAS in a treatment well and the time-lapse changes observed in DAS VSP.
4.3.1
Field Geology
The well is drilled in a tight-gas field located in Wyoming. USGS reports edited by
Law(1984; 1989) describe the geology and summarize the observations from multiple
exploratory wells drilled in the area. The deepest well described in the report (Law
& Spencer, 1989) is the El Paso Natural Gas Company Wagon Wheel No. 1 well,
drilled to 19000 ft.
The stratigraphic sequence obtained after analyzing the data
from the Wagon Wheel well is presented in the Figure 4-1. The well used for our
study was hydraulically stimulated and produces from the low-permeability lenticular
sandstones in the Lance Formation.
The Lance formation was deposited during the late Cretaceous period in a nonmarine environment in response to thrusting events in the Wyoming thrust belt and
133
uplift of the adjacent Wind River Mountains. The Lance formation is composed of
fine to medium grained sandstone, siltstone, shale and carbonaceous mudstone and is
interpreted to have been deposited in an alluvial plain environment. Sandstones in the
Lance formation typically contain 60-70 weight percent quartz. Chert and chalcedony
are abundant in these rocks. Clay content varies from 10 to 35 weight percent of
the bulk rock. Calcite and dolomite are commonly found in these sandstones and
kaolinite is a common cement. Shales in the Lance formation are dominated by illite
clay and have little kaolinite. The source of gas in the tight gas sand reservoirs of
the Lance formation are believed to be the interbedded coal and carbonaceous shale
and siltstone. Data from the Wagon Wheel well show that the reservoirs in the Lance
formation are over pressured and have a pressure gradient of 0.6 psi/ft at 10000
ft. As a result, the rocks in the gas bearing interval are gas-saturated (Charpentier
et al., 1989) and water saturation is assumed to be at irreducible saturation level.
Active generation of hydrocarbons at a rate that exceeds loss by migration (due to
the low permeability of the formation) is believed to cause the high pore pressures
observed in these reservoirs (Spencer, 1984). The analyses on core samples at depths
of 8100 ft to 10985 ft from the Wagon Wheel well indicate water saturation to be
irreducible and between 40 to 55 percent. Sandstones in the Lance formation have a
porosity of about 7-10 % (Charpentier et al., 1989) and permeability values ranging
between 2-140 micro darcy (measured at ambient conditions) and 1.26 to 58.4 micro
darcy at 1000 psi confining pressure, which is more representative of in-situ conditions
(Keighin, 1984). We take the following values for the properties in the stimulated
zone : porosity 7%, permeability 25 micro-darcy, pore pressure 7000 Psi, gas specific
gravity 0.61 (T. S. Miller et al., 1992, p. 257) and brine salinity 10000 ppm.
134
4.3.2
Well Completion and Stimulation Parameters
The well is 13601 ft (Measured Depth, M.D.) long, slightly deviated (an average angle
of deviation of 150 from the vertical) near the surface but turns to vertical after about
7500 ft. Figure 4-2 shows a schematic of the well-completion. The well has an outercasing, an intermediate casing and a production casing. The outer casing extends till
a depth of 3899 ft, while the intermediate casing extends till 9183 ft. The production
casing is present throughout the length of the well and has a smaller diameter below
7550 ft. The outer casing is cemented to the surface, while the inner and production
casing have the top of cement at 6500 ft. The FO cable is installed on the outer
surface of the production casing and is cemented from 6500 ft to the bottom of the
well.
A total of 19 stages (from 9200 ft M.D. to 13601 ft M.D.) were stimulated in
the well over a period of 10 days. Within this section of the well, the FO cable is
cemented between the formation and the production casing. Since the gas is produced
from lenticular sandstones with interbedded shales, the stages are selected so as to
stimulate each of the sandstone layers.
The well is progressively stimulated from
the bottom and thus, Stage I is the deepest and Stage 19 is the shallowest.
The
inset in Figure 4-2 shows the scaled schematic of the stages with their respective plug
locations. Most stages are about 200 ft long plug-to-plug, except for Stage 3, which
is about 800 ft. Care is taken to align the perforation shots away from the FO Cable.
Figure 4-3 shows the amount of fluid and proppant injected in each of the stages. On
an average, 75 Kilo lbs of proppant and 950 bbls of fluid were injected in each stage.
4.3.3
Seismic Acquisition
Hydraulic stimulation was monitored through time-lapse VSP using Vibroseis trucks
as the seismic source and DAS in the treatment well as the seismic receiver. Three
time-lapse VSP data sets were acquired with sources at positions A, B, and C (as
135
shown in Figure 4-4 ) aligned along the minimum horizontal stress direction, perpendicular to the hydraulic fracture growth. All the source positions are near offset (~
30)
VSP surveys with the sources located approximately 1380 ft, 740 ft, and 1010 ft away
from the surface projection of the vertical section of the well, respectively. At each
source location, two Vibroseis trucks were placed bumper-to-bumper, and activated
simultaneously. The trucks remained in position throughout the entire survey, until
the end of the stimulation of all the stages. The Vibroseis trucks at the three source
locations were activated sequentially with 32 sweeps, of 16/4 sweep/listen times (seconds) per location. The frequency of the Vibroseis sweep signal varied linearly with
time over a bandwidth of 6-80 Hz. Seismic data were collected before, during and after stimulation of 9 of the 19 stages as shown in the Figure 4-2, as seismic acquisition
was limited to daylight hours. Time-lapse data are available for all stages. For stage
3, time-lapse data are available only for source location B. Data collected for the first
three stages had only 8 sweeps per location at each time as opposed to 32 sweeps for
later stages. Over the course of the operation, a total of 5805 sweeps were collected.
Data for all the three VSP source positions were acquired by the same DAS
system in the treatment well. DAS receivers were spaced 8 m apart along the cable
spanning the well from the surface to a depth of 13550 ft. There are a total of 517
channels in the well. The zone of interest (all 19 stages) lies between channels 350 to
517. Channels are numbered ascending from shallower depth to deeper depth. The
DAS data were acquired with the 'ODH3' interrogator unit of Optasense, at 20 kHz
sampling ratel and then band-pass filtered to a band of 2 Hz to 500 Hz followed by
down-sampling to 1 ms. This down-sampled data are referred to as the uncorrelated
data in the remainder of this chapter. Note that DAS actually measures the phase-lag
'DAS data are purely digital and have no analogue of an anti-alias filter. The optical system
tends to generate white noise up to very high frequencies and this noise aliases into the seismic band.
So it is of interest to sample at the highest frequency possible and than bandpass and resample. The
highest DAS sample frequency is determined by the requirement that only one light pulse can be in
the fiber at any time.
136
of back-scattered light in the optical fiber as a proxy for strain in the cable and thus
the units of the uncorrelated data are radians. A gauge-length of 40 m was used for
DAS acquisition.
4.3.4
Temperature Monitoring using DTS
DTS was used to continuously monitor the temperature over the entire period of
stimulation of all the stages in the well. DTS measurements were made at a spatial
resolution of 1 m and at 30 s sampling interval. DTS is based on temperature dependent Raman-scattering in the optical fiber (Grattan & Meggitt, 2000, p. 254).
Raman-scattering is weak compared to Raleigh-scattering and thus requires lower
sampling rates to stack sufficient signal. The optical fibers used for both DAS VSP
and DTS were housed by the same FO cable.
4.4
DAS Challenges
In this section, we present the unprocessed DAS VSP data delivered by Optasense and
discuss various issues with the data. A vibroseis truck creates a long (many second)
acoustic sweep, giving a weak and complex seismic record. Correlation of this record
with the sweep signal produces a record that resembles that of an impulsive source.
We refer to this as correlated data. Figures 4-5a, 4-5c, and 4-5e show the uncorrelated
shot-gather (1 kHz sampling rate after down-sampling) for a single sweep of the
Vibroseis trucks acquired before, during, and after stimulation of a stage. Figures
4-5b, 4-5d, and 4-5f show the corresponding correlated shot-gathers. The channels
in the figures are numbered increasingly with depth.
Notice that the uncorrelated
and correlated data contain noise that appears as horizontal stripes (e.g. appears
on all channels at a given time). This is a common observation in DAS data and is
linked to time-variant optical noise that occurs equally on all the channels. Sweeps
137
during and after stimulation are noisy for channels above the bottom perforation.
However, the data quality is similar to the pre-stimulation sweep for channels below
the bottom perforation. Also, we see ringing (vertical stripes) at certain channels in
the correlated data, especially in the zone close to the stimulation (channels 275 to
432). The ringing, which is linked to spike-like noise in the uncorrelated data, masks
the wave-field and renders time-lapse interpretation impossible. Also, observe that
the amplitude of the traces in the uncorrelated record acquired after stimulation varies
from channel to channel for all the channels above the plug of the stage. We show
that this is due to temperature changes in the well. In addition, depth calibration of
DAS and DTS channels is necessary to accurately locate them in the well. We discuss
these issues in the following sections.
4.4.1
DC bias
Figure 4-6 shows the trace at channel 403 from the shot-gather in Figure 4-5e. Observe
that there is a DC bias on the DAS uncorrelated trace. Ideally, we expect the sweep
signal from vibroseis truck and the random noise to have zero mean and thus there
should be no such bias. We estimate the DC bias by taking the median of the trace.
We avoid taking the mean of the trace due to the spikes in the data.
Figure 4-7
shows the variation of DC bias with channel/depth and time of day, before, during
and after stimulation of Stage 9. The color indicates the amplitude of the DC bias
and is shown white when no data were collected.
In general, we can identify four different phases during stimulation:
A) Pre-
stimulation phase when the well is calm, B) Fracture initiation phase when the pressure is increased in the well to initiate and propagate the fracture, C) Stimulation
phase when the fluid and proppant are pumped into the well, D) Post-stimulation
phase when the well is shut-in after the stimulation and the pressure is allowed to
slowly deplete as the fluid leaks from the well into the formation. We observe that
138
the DC bias is approximately zero throughout the well in the pre-stimulation phase.
However, in the remaining three phases DC bias varies above the plug (shallower
channels) and is zero below the plug. For channels located above the bottom perforation, the DC bias is approximately zero before fracture initiation, increases very
rapidly to a positive value as soon as the stimulation starts and then turns negative
about half way through the stimulation. It slowly recovers from a negative value to
zero in the post-stimulation phase. DC bias variation is clearly correlated with the
activity in the well and is probably related to pressure and temperature fluctuations
in the well due to stimulation. We believe that interpretation of the DC bias requires
integration with respect to time-of-day and we justify it as follows: If raw DC bias
were to represent the pressure or temperature relative to pre-stimulation level then
we cannot explain the change in the sign half way through the stimulation. Stimulation increases the pressure in the well and we do not expect pressure to fall below
the pre-stimulation level during stimulation.
Similarly, injecting cold fluid reduces
temperature in the well and we do not expect the temperature to rise above the
background temperature during stimulation.
As we discussed in Chapter 3 , DAS
measures strain or strain-rate depending on if the the phase-lag is estimated between
back-scattered signal at the current time and a reference time or between consecutive time steps, respectively. The DAS system used in this trial measures phase-lag
between back-scattered signal at two consecutive time steps and thus the median of
the trace represents average strain-rate over the record time and thus the rate of
change of temperature and/or pressure. We can estimate the total strain in the fiber
compared to the pre-stimulation level by integrating the DC bias (strain-rate) with
respect to the time of day. We assume the strain rate to be constant in between two
sweeps. As the duration between two sweeps increases we introduce more error in the
integration. The integrated DC bias followed the temperature in the well, measured
using Distributed Temperature Sensing (see Figure 4-8). Temperature changes in the
139
treatment well (up to 500 C) cause significant long-period strain as well as refractive
index changes in the DAS fiber. Usually, the refractive index change is the dominant
effect. A part of the strong temperature signal survives the band-pass filter (2 Hz to
500 Hz) applied before down-sampling to 1 kHz and shows up as the DC bias.
4.4.2
Spikes
The spikes in the uncorrelated data are large in amplitude (ranging up to 90 radians)
compared to the signal (on the order of 0.1 radians) as illustrated in Figure 4-6. These
spikes in the uncorrelated data spread out to the entire time record as ringing noise
when correlated with the Vibroseis sweep signal. We observe spikes in data collected
both before and after stimulation. However, the incidence of the spikes is higher in
the deeper section of the well, above the plug of the stage being stimulated, and just
after stimulation. Figure 4-9a shows spikes extracted from data at different channels
and from different sweeps, and aligned at their peaks. We see that the normalized
spikes (see Figure 4-9b) are all similar and decay to the pre-spike level within about
150 ms. The spike is steep but doesn't occur over a single time sample - it builds up to
the peak. We did not observe any correlation between the height of the peak and the
time it took to reach the peak value. Figure 4-9c shows similar spike noise observed
in a fiber resting on a table top in laboratory, even when the cable is not exposed to
any external stimulus. The spikes in the laboratory have the same temporal shape
as the field data after amplitude normalization (see Figure 4-9d). Finally, spike noise
was observed in down-hole data at some other wells, at all depths, despite the fact
that well data are generally very quiet. It is unclear whether the spikes are caused by
sudden large fiber strain or whether some other mechanism, such as problems with
the optical hardware, is responsible.
A jump in the data could occur when large
strain causes the optical phase to differ by more than 27r and the recording system
would place the strain at an arbitrary value and continue to record with respect to
140
that value. However, we observe that the data approaches the pre-spike median level
over the decay leg of the spike. It is possible that the decay leg is caused by the filters
used to suppress spikes.
Spike removal: Spikes are identified by processing one trace at a time. First,
the DC bias of each trace is removed by subtracting the median of the trace. Then, all
the data points larger than an amplitude cut-off are identified as points on the spikes
and are set to zero. The amplitude cut-off for each trace is set to a scale factor times
the median of the absolute values of all the data on the trace. The scale factor is set
so that the cut-off doesn't fall below the amplitude of the data due to the Vibroseis
sweep. This process is repeated to further suppress the spikes. Once the spikes are
filtered, 32 successive sweeps were median-stacked for a given channel, which, further
suppresses the remnant spikes and considerably improves the data quality. Note that
the use of Vibroseis data limited the spikes to a small portion of any given shot signal,
which made the data recovery much more robust. This recovery would not have been
possible if the data were from an explosive source and if the spike occurred at the
time of an arrival of interest.
4.4.3
Depth Calibration
Depth calibration is an important issue for DAS, both for regular VSP and time-lapse
measurements.
Let us first consider how one infers fiber depth in typical OTDR
measurements.
The optical hardware takes note of the time delay between laser
pulse injection into the optical fiber and the detection of the backscattered signal
from the channel. Then, using the speed of light in the optical fiber (by accurately
knowing the index of refraction in the optical fiber) the length of travel path along
the fiber can be computed. However, it is common to have an unknown length of
excess cable above the well head and thus we cannot relate cable length to depth.
To deal with this problem, the channel at the well head (known depth) is identified
141
by tapping at the well head and all subsequent channels are assigned depth based on
a pre-assigned receiver spacing and assuming that the fiber strictly follows the well
trajectory. Unfortunately, the fiber is never just a straight section. For example, it
is often 'overstuffed' into the cable to prevent parting when the cable is stretched.
In addition to this, a small error in speed of light in the fiber would progressively
place deeper channels at an increasingly incorrect depth. So the time calibration no
longer accurately recovers the correct depth and the actual depth of each channel is
something that must be measured.
For time-lapse interpretation of hydrofrac monitoring, accurate depths are required to correlate data with well operations. In the current data set we observed
that reflections from known depths in the data did not match the depths assigned to
the DAS channels using time calibration and so re-calibration was clearly necessary.
We calibrated the receivers using two independent methods: 1) Tube-wave reflection
at the plug and 2) DC bias jump at the base of perforations (in general, the plug
was within a few feet of the bottom perforation and hereafter we refer to both with
the generic term 'plug'.) The goal of both methods is to identify the fiber channel
that corresponds to a known depth in the well (plug or perforation) at each stage
and assign the known depth to the fiber channel. Plug and perforation depths are
typically measured using tools accurate to a couple of feet.
Tube-wave reflection at a plug
Tube-waves are guided waves in the borehole fluid that travel along the well. Disturbances in the borehole fluid (e.g. perforation shots) or noise at the well head can
generate tube-waves. We use tube-waves generated from the perforation shots that
are fired before the stimulation of each stage to identify plug locations. At a given
stage, the plug is placed first and then the casing section above the plug is perforated
by firing shots into the formation. A tube-wave is generated by the perforation gun
142
and travels both upward and downward along the well. The plug acts as a barrier
to the downward propagating wave and reflects it back up. Given the proximity of
perforation shots to the plug, it is difficult to distinguish the upward propagating
wave and the first reflection from the plug. However, once the tube-wave reaches the
surface it reflects back from the free surface and propagates down the borehole and
reflects back up at the plug. This process repeats until the wave is attenuated.
Figure 4-10 shows the raw data when a perforation shot was fired. We can identify
the tube-wave reflecting from the plug at channel 432. We also see an additional
reflection propagating downward at channel 296. This reflection occurs due to the
change in the diameter of the production casing at 7550 ft. The reflection at channel
15 is at the top of the water column, probably within a few tens of meters of the
surface (see Figure 4-10c). Observe that the reflections are not found sharply at a
single receiver but seem to be smeared over about 5 receivers which is about the gauge
length used in the experiment 2 . We expect the observed reflection to be smeared over
half the gauge length above and below the true reflection and so we identify the
mid-point of the smeared region shown in Figure 4-10b as the plug location.
DC bias jump at the bottom perforation
In section 4.4.1, we saw that DAS seismic traces had a 'DC bias' that was related to
temperature variation in the well. This observation leads to another depth calibration
method.
During stimulation, fluid flow will typically be small below the bottom
perforation and temperature will change discontinuously at the base of the bottom
perforation as that is the limit of penetration of the cool, pumped water.
Simply
assigning the bottom perforation depth to the channel with the observed DC bias
discontinuity can provide an accurate calibration.
Figure 4-11 shows the variation
of DC bias across the bottom perforation after stimulation of stage 9. We can see
2
Interference between upgoing and downgoing waves will also contribute to uncertainty in interpretation
143
that the transition from a negative value to zero occurs over about a gauge length (5
receivers). We identify the mid point of the transition as the location of the bottom
perforation (channel 432). "Finite" strain is measured by summing the elongation in
the cable over a gauge length (through optical interferometry) and dividing it by the
gauge length '. A channel located within half a gauge-length above the plug samples
a portion of the fiber below the plug and vice-versa. This results in the transition of
DC bias and tube-wave reflection over a gauge-length centered about the perforation
or plug, respectively.
Calibration
From the two observations above we identified the channels corresponding to the
plugs and the bottom perforation for those stages where DAS data were available.
For most stages, the plugs and the bottom perforations were found to be located
within one DAS channel (Figure 4-12a) consistent with the distance between plug
and bottom perforation. Plug and bottom perforation are separated by less than 8 m
for all stages except stage 3 where the distance is 680 ft. For this reason we use plug
or bottom perforation interchangeably for the remainder of the text. For stage 7, the
tubewave reflected from a sand-bridge formed above the plug. This was verified when
the sand-bridge was drilled through to continue the operations. In general, tube-wave
reflections at plugs are found in sweeps during perforation shots while DC bias jumps
are analyzed from sweeps soon after stimulation, when the DC bias is prominent.
The error in identifying the channel corresponding to the plug/perforation either
from tube-wave reflections or DC level jump is
accurate, the error in the channel depth is t
1 channel.
If the plug depth is
1 receiver spacing or ~ t
8 m. Cali-
bration could also suffer from the error in measurement (by the coil tubing unit) of
plug depth which is on the order of couple of feet. Figure 4-12b shows the depths
3
Note that the output of the box is differential displacement, which is not normalized by the
gauge length.
144
estimated in the field for those channels identified to be at the plugs of different stages
together with depths of the same receivers after assigning them the plug depths using
the methods described here. The field estimated depths were 419 ft shallower than
the properly calibrated depths. This is likely a datum issue where the first channel
was assigned an incorrect location. Channel 30 was assigned to be at ground level.
However, when we look at the reflections of tube-wave from the surface we see that
the tube-wave actually reflects between channels 14 and 15, corresponding to a bulk
depth error of (30 - 14.5) x 8.19 x 3.28 =417 ft. A line fit through the calibrated
receiver depths gives an average spacing between the receivers of 8.19 m, which is in
line with what we expect for this system.
In summary, improved depth calibration using two methods that mutually agree to
within one channel have given us more reliable fiber channel depths. This calibration
is relevant for multi-stage fracture treatments where well operations give multiple
distinct depth calibration points along the well. Here, the method can be further
improved by: 1) Reducing the gauge length as much as possible, subject to having
adequate signal. 2) Recording the DAS data continuously (even when there is no
active source), so that all plug depths and perforation shots can be analyzed, subject
to safety regulations.
4.5
4.5.1
Data Processing
Pre-processing
DAS VSP data have to be pre-processed to make it suitable for regular VSP processing.
The processing workflow is summarized in Figure 4-13. As discussed in
the previous sections, we first remove the DC bias in each sweep by subtracting the
median from each trace. This allows us to identify the spikes in the trace automatically using an amplitude cut-off and then clip noise (see Section 4.4.2 ). After spike
145
removal, we apply a zero-phase band-pass filter (4-10-70-80 Hz) to remove remnant
low-frequency noise (e.g: Temperature) in the data. Bandpass filtering prior to the
removal of spikes will corrupt the spectrum with the energy from the spikes. Ideally,
the DC bias and spikes would be removed before the DAS raw data (20 kHz) is downsampled to 1 kHz. The uncorrelated data are then median-stacked (32 sweeps) to
improve signal-to-noise ratio. It is important to take the median rather than mean to
suppress the remnant spikes. The median stack also serves to suppress the random
optical noise that varies from sweep to sweep. The stacked raw-data are then correlated with the Vibroseis sweep signal to obtain the correlated data. Stacking has to
be done prior to the correlation so that the energy from the remnant spikes is not
spread over the entire trace in the correlated data. The stacked data still contains
the random optical noise that occurs at all the channels at each time and manifests
as horizontal lines in the shot gather. At each record time we estimate the optical
noise by taking the median of the data from channels 250 to 517. We avoid channels below 250 since the data are corrupted by large tube-wave noise in the shallow
section of the well. The median filter for optical noise removal works better after
correlation with the Vibroseis sweep as the signal is localized when compared to the
uncorrelated data. We then apply a FX-Decon filter to suppress random noise and
enhance spatially correlated events.
The FX-Decon filter is applied trace-by-trace
over a moving time-window of length 64 ms and using 15 traces centered about the
current trace. The spatial prediction filter used in the FX-Decon filter is three traces
long. Thus, shot-gathers with good signal-to-noise ratio are obtained for all the three
source locations at different stages of the well stimulation. Note that we did not apply
any amplitude gain control to the data.
Figure 4-14 shows the data from 4-5e at various stages of the pre-processing workflow. Notice the spikes and DC bias above the bottom perforation in the uncorrelated
sweep (see Figure 4-14a). Upon removal of spikes and DC noise, we predominantly
146
observe the optical noise, which manifests as horizontal lines, in the sweep (see Figure
4-14b). After band-pass filtering and stacking 32 consecutive sweeps, the Vibroseis
sweep can be clearly seen with some remnant optical noise (see Figure 4-14c). Figures
4-14d and 4-14e show the correlated stacks before and after filtering the optical noise,
respectively.
Figure 4-14f shows the final processed stack after FX-Deconvolution.
Compare the pre-processed correlated data (see Figure 4-5f) with the processed correlated data (see Figure 4-14f). The processing work flow has significantly improved
the data quality. We clearly identify a down-going P-wave and P-wave reflections from
multiple interfaces. A down-going S-wave is strongly observed in the shallow section
of the well (where the well is slightly deviated) and becomes very faint below channel
250. We expect weak S-waves in the vertical section of the well due to the (lack of)
broadside sensitivity of the fiber and the S-wave radiation pattern of the Vibroseis
which do.esn't have much energy propagating vertically down. The shallow section
of the well is contaminated by large amplitude tubewaves caused by well operations.
Tubewave noise is large until channel 170 (located at
O3900 ft where the outer casing
ends) and is observable until channel 257 (located at the top of cement for production
casing, % 6500 ft). At depths below channel 257 tubewaves are barely observable.
Notice that the amplitude of the tubewave generated from a deeper perforation shot
(see Figure 4-10) amplifies in the section of the well where the production casing is
not cemented. This is because the suspended section of the production casing deforms
easier due to a propagating tubewave compared to a cemented section as it is not
confined and free to deform.
Figure 4-15 shows the pre-processed VSP data collected from source locations A,
B and C before any stimulation related operations started in the well. The shallow
channels in these stacks are free from tubewave noise as the activity in the well was
minimal. To obtain these baseline stacks, we stacked nine sets of 8 numbered sweeps,
a total of 72 sweeps at each source location.
147
All of the 72 sweeps at each source
location were collected within a two hour period and there was no activity in the
well during the time period. As a result, all the sweeps are amenable to stacking.
The data quality is best for the source located at A. The downgoing and reflected
P-waves, as well as the down-going S-wave are more visible when the Source is at A.
After stimulation of stage 1 and until the stimulation of stage 3, we stacked four sets
of 8 numbered sweeps to obtain 32 sweep stacks. All four sets were collected within
one hour. However, they suffer from relatively poor quality as the conditions in the
well change between the four sets. For later stages, 32 sweeps were collected at each
time.
4.5.2
Processing
Typical VSP processing involves the separation of up and down-going wave-fields
and obtaining corridor stacks to help tie surface seismic data to the well. Inside and
outside corridor stacks are then used to identify and suppress inter-bed multiples in
the data. Given that we are only interested in studying the time-lapse changes in the
up and down-going phases, we do not attempt to identify inter-bed multiples (also
inter-bed multiples are barely observable in the data). We separate the wave-field
and perform time-lapse analysis. The work-flow is shown in the Figure 4-13.
We first pick the arrival times for direct P- and S-waves by picking the peak
amplitude in the pulse. The wavelet in correlated Vibroseis data is a mixed-phase
wavelet since it has a zero-phase component from the auto-correlation of the sweep
signal (Klauder wavelet) and a minimum phase component due to the earth response.
As a result, it has pre-arrival side lobes and the first break is not obvious.
We
pick along the peak amplitude to obtain a relative time profile followed by aligning
the traces and cross-correlating to fine tune the arrival picks. For the purpose of
separating the up and down-going wave-field, it is sufficient to know relative arrival
times. To separate the down-going P-wave field: First, the traces at each channel
148
are shifted up by the P-wave arrival time at that location in order to flatten all
the down-going P-waves. Then a moving median filter is applied along the channel
direction to retain the down-going P-wave and suppress other phases (down-going S,
up-going P and S ). For the up-going wave-field, the traces are shifted down by the
arrival pick at each location and the median filter is applied. When a long window is
used for the median filter amplitudes are smeared across the channels and the spatial
resolution is lost.- However, using a very short window for the median filter may lead
to cross-talk between the different phases. In order to overcome this, we follow an
iterative approach, starting with a 60 channel long median filter, followed by a 30
channel and a 7 channel long median filters. We first estimate the trend for all the
phases in the data by using a long window (60 channel) for the median filter. In the
next step, a shorter window is used for the median filter to extract each phase from a
data that has the previous step estimates of the remaining phases removed from the
total wave-field. We repeat this process as we move to shorter windows to gain spatial
resolution. Figure 4-16 shows an example of the separated up and down-going wavefields. Down-going P-wave is the strongest signal, followed by reflected P-waves and
down-going S-waves. Note that the remnant energy after extraction of all the phases
is small and not coherent. Figure 4-17 shows individual traces of separated wave-field
at channel 350. Observe that there is some reflected P-wave energy within the direct
down-going P-wave pulse. This reflected energy comes from reflectors located at a
travel time of half the pulse width below the channel.
We primarily analyze the down-going direct P-wave since it is the strongest signal
in the data and also to avoid interference from reflected energy. First, we extract the
down-going P-wave within a window of 400 ms about the first arrival pick (window
shown in Figure 4-17 ) and align the traces. Figure 4-18 shows the total wave-field
and the down-going P-wave windowed and aligned. After removal of the reflected
energy we can see the down-going pulse clearly. However, comparing the separated
149
time-lapse data for changes in the formation is not trivial. The changes in the data
may be due to changes in source coupling, noise level, receiver coupling and receiver
response change due to pressure and temperature fluctuations. For those channels
that are above the stimulation zone, we do not expect changes in the data due to
stimulation. Any differences in the baseline and monitor survey for these channels can
be attributed to the changes in source wavelet, receiver coupling and receiver response
change between the two surveys. We would like to remove these 'overburden' changes
from. all of the data and we build a filter that matches the baseline data to monitor
data for these selected receivers. This filter is applied to all the traces to minimize
the difference in the surveys due to source wavelet/receiver response. This process
is effective in balancing the changes in source wavelet and receiver response change.
However, the local coupling may change differently in the stimulated zone and we
may not be able to compensate for it. In this study, we chose channels 265 to 315
that are just above the stimulated zone for all the 19 stages, but are installed similar
to the channels in the stimulated zone. A matching filter of length 400 ms is built
in frequency domain by matching the windowed down-going direct P-wave in the
monitor survey to the baseline survey. The matching filter is then applied in the time
domain after tapering using a Tukey window (20%). We use the windowed downgoing P-wave to build the matching filter so that reflections from the stimulated zone
are not included. The time-lapse attributes are discussed in Section 4:6.
4.5.3
Background model
Since the stimulated section of the well is vertical, the wavefield generated at the
surface propagates nearly parallel to the well. This geometry allows us to use the
differential arrival time of the wave between two channels to obtain the average propagation velocity over the distance separating them. We assign it to the midpoint of
the two channels. We used a 25 channel long moving window
150
(~
196 m apart) to
estimate the average velocity at each channel depth. Figures 4-20a and 4-20b show
the P- and S-wave velocity models obtained this way. The velocity model estimated
using data from the three source positions is consistent for P-wave and has large
spread for S-wave. The spread in S-wave velocity is due to the error in picking of the
weak S-wave on deeper channels.
Attenuation in the formation can be estimated by looking at the spectral changes
in the down-going P-wave. Figure 4-19 shows the power spectrum of the down-going
P-wave for the windowed data shown in the Figure 4-18. The behavior of the spectrum
with depth (channel) is consistent and stable. The spectrum has a distinct peak at 20
Hz and a smaller one at 40 Hz. However, the spectrum of the input Vibroseis sweep
signal is flat between 6 to 80 Hz. The loss in high frequency energy is due to intrinsic
attenuation and scattering from thin layers. We use the spectral ratio method (Tonn,
1991) to estimate the apparent Quality factor
Q
which includes contribution from
both intrinsic attenuation and that due to scattering from thin beds.
Q
is obtained
from the slope of the spectral ratios over the frequency band from 10 Hz to 50 Hz.
Figures 4-20c and 4-20d show the average
estimate the average
Q
Q and interval Q in the zone of interest.
by comparing spectra at a given channel with respect to the
reference at channel 250. Interval
Q at
each channel location is estimated using traces
recorded at locations of channels whose numbers differ by 200 (~
at that location. The average
350 to 517. The interval
observed
Q
We
Q
Q factor
1600 m) centered
is about 40 in the entire interval from channel
shows an increasing trend of
Q
with depth. However, the
values are lower than that expected for a typical tight sandstone; this is
probably due to scattering from multiple thin layered beds of shale and sandstone.
151
4.6
Time-lapse Analysis
Analysis of the data focused on detailed scrutiny of operator logs and manipulation of
seismic data to provide displays that were sensitive to details, easy to understand and
amenable to viewing the entire picture of this complex multi-stage fracture treatment.
First arrival (down-going) P waves were the primary subject but work has also been
done on P-wave reflections. We work on the up and down separated P-wave data after
matching the time-lapse surveys. In the following sections, we discuss the analysis in
detail.
For each stage, we classify the data into pre-stimulation and post-stimulation
stacks. A pre-stimulation stack is the stack before hydraulic stimulation of a given
stage, but after the placement of the plug and the completion of perforation job
for that stage. When such data were not available, pre-stimulation stack data were
selected to be after the placement of the plug and before the completion of the perforation job. A post-stimulation stack for a stage is the stack after the stimulation of
that stage, but before the placement of the plug for the next stage. Ideally, the only
operation that occurred between the time that a pre and post stimulation stack were
collected was the well stimulation. Figure 4-21 shows a pictorial description of the
timeline of this classification.
Time-lapse attributes can be obtained by comparing
'locally' just before and after stimulation of each stage to detect changes caused by
the stimulation of that particular stage. We refer to them as Local time-lapse attributes. In this case, the baseline stack is the pre-stimulation stack and the monitor
stack is the post-stimulation stack for that stage. We can also compare changes with
respect to a global baseline stack collected before the stimulation of the first stage. In
this case, we can look at how changes build up as stages are progressively stimulated.
We refer to these as Global time-lapse attributes. We analyzed both global and local
time-lapse attributes for all the source locations. In all the cases, the monitor stacks
are matched to the baseline stacks before extracting time-lapse attributes.
152
4.6.1
Time-lapse Attributes
The simplest attribute is the Amplitude Difference between the matched monitor stack
and the baseline stack. This gives us a preliminary understanding of the changes in
the data. Since we did not apply amplitude gain with depth, the amplitude of traces
decrease as we move towards deeper channels. So time-lapse amplitude differences
may appear smaller at deeper channels.
%
The second attribute we study is the
Energy change in amplitude. It is the percentage change in the energy between the
monitor trace and the baseline trace over a moving window. To obtain percentage
change we normalize the change in energy with the energy of the baseline stack about
the same window.
The normalization adjusts for the energy differences between
deeper and shallower receivers. It is given by
T/2
T/2
1:Am(t
AE%(t)
=
+
7 )2
A6 (t +
-E
(4.1)
T/2
E
L.
r=-T/2
T )2
Am(t +
TF)
2
where T is the window length, Ab and Am are the instantaneous amplitudes of the
baseline trace and the monitor trace, respectively. The instantaneous amplitude is
obtained by taking the amplitude of the analytical function built from the entire trace
and its Hilbert transform. For the current study we took a window of T= 100 ms.The
sign convention is positive when the monitor is stronger than the baseline. This will
correspond to bright colors in the plots. The third attribute we looked at is Timeshift. Possible changes in the P and S wave velocities due to hydraulic stimulation
may result in time-delay or time-advance of the arrivals in the monitor data. Since
the changes are small and time-shifts may be below the sampling rate (1 ms), we first
interpolate by a factor of 10. Then, the Time-shift is measured by correlating traces
from before and after stimulation over a moving window of length 100 ms. A positive
Time-shift corresponds to a time advance and a negative Time-shift corresponds to a
153
time-delay. We also present the time-lapse spectral changes in the data.
4.6.2
Analysis on direct P-wave
As discussed earlier, we study the time-lapse changes in the separated down-going
wave-field after aligning and windowing about the direct P-wave (as shown in Figure
4-18) and matching the time-lapse data sets. Before comparing the time-lapse data
sets for changes due to stimulation, we evaluate repeatability of DAS survey, the effect
of plug placement and perforations on time-lapse DAS VSP measurements.
Figure 4-22 shows the difference in the amplitude of the data and the energy
changes between two stacks that were collected within an interval of 45 min after
perforating stage 12. No well operations were carried out between these two surveys
and these attributes serve as a measure of noise or repeatability of the DAS VSP
survey at the well conditions. Note the large change in energy at reduced times earlier
than 150 ms and later than 300 ms. In this zone, the signal is weak and the changes are
dominated by the noise (see Figure 4-18). Within the strong signal window (150 ms
to 300 ms) about the P-wave arrival, the median value of the absolute energy change
over channels 250 to 517 is 3%. Though maximum energy change seen in noise is
close to 10%, we can recover changes in signal smaller than that by smoothing. The
energy changes at times away from the direct P-wave arrival appear large because the
noise energy is small and varying. Similarly, the median value of absolute time-shift
over the same channels and time window is 0.004. These values denote the minimum
change in the signal that we can detect in the current environment.
It is possible that the placement of plug or perforation shots fired in the well may
damage or effect the cable sensitivity. To test this, we compared data collected before
and after placement of plug, as well as before and after the perforation operation.
Figure 4-23 shows the time-lapse amplitude difference and energy change during the
plug placement and perforation operation for stage 16. We observe that the changes
154
are on the order of noise level and are not spatially correlated. Thus, the effect of cable
placement and perforation shots can be ignored for further analysis. For comparison,
Figures 4-24d and 4-24c show time-lapse changes due to stimulation. We can see that
the dominant time-lapse signal is associated with the stimulation of the stage.
Local Time-Lapse Attributes
We first focus on local time-lapse changes from stage 16 and then summarize the
results from all the other stages. Figure 4-24 shows stage 16 pre-stimulation baseline
stack and post-stimulation monitor stack, as well as the local time-lapse attributes:
Amplitude difference, % Energy change in amplitude and Time-shift. The monitor
stack was obtained 2 hrs after the end of stimulation. We observe systematic changes
in data caused by stimulation of the stage. From the Difference between the data sets
we can see that, after stimulation, the amplitude of direct P-wave increased above the
plug and decreased below the plug. This is more clearly observed in the % Energy
change. The energy in direct P-wave increased by a maximum of 15 % in a zone above
the plug/bottom perforation and decreased by a maximum of 20 % just below the
plug. The change from increase in energy to decrease occurs sharply at the location of
the plug. The zone of decreased amplitude occurs over about 10-15 channels, which is
two to three times the gauge length. The zone of increased amplitude spanned about
68 channels
(~
(~
550 m). For most other stages, this zone was only around 26 channels
200 m) . Figure 4-25 shows pre- and post-stimulation traces at channels above
and below the plug. The amplitude changes can be clearly observed in these traces.
Figure 4-25c shows the time-lapse change in the spectrum of the traces above and
below the plug. We do not see strong frequency dependent change in the spectra due
to stimulation. All the frequencies show similar increases or decreases in amplitude.
The time-shifts between the time-lapse data sets are noisy and we observe a submilli second time advance at the location of the plug. We also compared stage 16
155
pre-stimulation stack with data collected after the placement of plug for stage 17.
The data quality improved since the well was calmer by that time . However, the
time-lapse attributes remained the same confirming that the placement of a plug does
not cause time-lapse changes nor negate changes that occurred during the previous
stimulation.
We summarize the time-lapse changes for all the stages in Figure 4-26.
Each
row in Figure 4-26a represents the % Energy change in amplitude for a given stage,
extracted by taking the mean of the % Energy change in amplitude in a 150 ms
window about the direct P-arrival. Figure 4-26b shows the Time-shift extracted in a
similar way. Similar to stage 9, we observe an increase in amplitude above the plug
and a decrease below it for all the stages. The size of the amplified zone differs for
different stages. It is easier to identify the size of these zones from Figure 4-26c where
the energy change is plotted as traces. Observe that the zone of decreased amplitudes
below the plug are about the same size (10-15 channels) for all the stages. The match
to about two to three gauge lengths might be coincidental or it might represent a
very localized response right below the bottom perforation that is spread out by the
optical measurement. The time-shifts are minute (sub ms) and we observe very small
time-advances for the channels at the bottom perforation.
Global Time-Lapse Attributes
Global time-lapse attributesare extracted by comparing both pre- & post-stimulation
stacks for all stages with a global baseline stack that is acquired prior to any stimulation in the well. These attributes represent cumulative changes due to stimulation
of successive stages. As with the local time-lapse results, we summarize the results
for all the stages by extracting the mean attributes in a 150 ms window about the
direct P-arrival at each channel. Figures 4-31a and 4-31c show % Energy change in
amplitude with respect to global baseline stack for pre- and post-stimulation stacks,
156
respectively. Consistent with our observations for local time-lapse attributes, we observe a zone of increased amplitude above the plug and a zone of decreased amplitude
below the plug. However, unlike the local time-lapse energy changes, the zone of decreased amplitudes extends for all the channels below the current plug and builds up
cumulatively with successive stages. From local time-lapse attributes we note that the
decrease in amplitude below the plug is larger than the increase in amplitude above
the plug. As a result, the zone of decreased amplitude from a given stage masks the
zone of increased amplitude from the previous stage and we see an increasingly large
size of the zone with decreased amplitude. From this we infer that the decrease in
amplitude is a long-lived change that doesn't disappear soon after stimulation. One
outlier is stage 2 where the amplified (red) zone at about channel 500, is noticeable
even after stimulation of subsequent stages. Remember that stage 3 covered a larger
depth range than the other stages (see Figure 4-2) and the attenuated zone from stage
3 stimulation probably does not extend long enough to mask the amplification. Based
on this we argue that even the amplification changes when not masked are long-lived.
In the previous section, we argued that placement of the plug doesn't have any effect
on time-lapse changes in the data. As a result, the pre-stimulation stack for a given
stage includes the effects of all previous changes up to the stimulation of the previous
stage, i.e., the pre-stimulation stack for a given stage is the post-stimulation stack for
the previous stage. So, for the pre-stimulation stacks the transition from increased
amplitude to decreased amplitude occurs at the plug of the previous stage.
Global time-shifts, though noisy, show sub milli-second time-advances at the plug.
As for Local time-shifts, it is probably due to wavelet distortion at the plug. As the
well is progressively stimulated, we do not observe corresponding increase in timeshifts at deeper channels (below the plug). The time-shifts are probably due to local
effects.
In all the stages, we observe increases in the amplitudes at channels 200 to 300
157
and decreases in the amplitudes around channel 350, in a shallow region that was
not stimulated. This is due to noise in the pre-stimulation baseline stack which is
used to compare with remaining stacks. These changes are not observed when the
pre-stimulation stack for stage 5 is used as a global baseline for subsequent stages.
Note that we do not observe them in the local time-lapse changes.
In summary, time-lapse changes due to stimulation are observable in the direct Pwave. We observe increase in the amplitude of the direct P-arrival above the plug and
decrease in amplitude below the plug. The size of the amplified zone varies among the
stages. However, the size of the zone with decreased amplitude is nearly constant for
all the stages. The reduction in amplitude below the plug is larger than the increase
in amplitude above the plug. As a result, as successive stages are stimulated, the
attenuated zone from a given stage masks the amplified zone from previous stage and
we see a build up of the attenuated zone. We observe that placement of the plug
or perforating the casing didn't cause significant time-lapse changes in the data. We
did not observe significant time-shifts. Time-lapse changes are consistent over all the
source positions.
4.6.3
Analysis on up-going P-waves
As the direct P-wave propagates downward it generates upward propagating reflections at layer interfaces. These reflections pass through the stimulated zone again.
Analysis of reflected energy passing through the stimulated zone can provide further
constraints on the changes in the stimulated zone. For example, if we assume that the
amplification and attenuation changes in the direct P-wave are caused by diffraction
at the stimulated zone, the pattern should be reversed for a reflected wave that is
incident in the opposite direction (see Figure 4-28a). Also, the reflected energy travels twice through the stimulated zone, once while going downward and once while
going upward. Time-shifts and attenuation changes in the reflected phase would be
158
double that of the down-going P-wave. One of the major challenges in interpreting
the current time-lapse observations is to differentiate between formation changes and
changes due to coupling or fiber response change. A simple trick to overcome this is
to compare the reflected wave at a channel above the stimulated zone with the direct
arrival at that channel (as shown in Figure 4-28b). We now compare the spectral ratio
and arrival time difference of the reflected phase with respect to the direct arrival,
before and after stimulation.
We analyzed the reflected wave-field using the methods described above. However,
the data were too noisy to extract any meaningful observations. For a survey with
better signal-to-noise ratio and stronger reflections, above methods will help constrain
the model as well as obtain better resolution on the time-lapse changes.
4.7
Interpretation
Interpreting the time-lapse changes in the current study is challenging as the seismic
acquisition system (DAS) itself is not well understood and not widely tested for
time-lapse monitoring. This study contributes significantly towards using DAS for
time-lapse studies while addressing various issues including robust depth calibration,
repeatability of the surveys and the effect of environmental factors on the time-lapse
measurements.
We observe systematic time-lapse changes due to hydraulic stimulation but questions remain on whether the changes are due to bulk rock stimulation or due to
coupling changes and fiber effects. In the following discussion, we consider different
factors that may influence time-lapse measurements and discuss their contribution
to time-lapse changes. We first start with Measurement system factors such as temperature, coupling, cable properties and finally discuss models for formation changes.
The discussion on measurement system factors is summarized in Table 4.1.
159
4.7.1
Measurement system factors
Pressure and temperature changes
The pressure and temperature conditions in the well vary between the time-lapse
surveys. Before the stimulation, the temperature and pressure are near geothermal
and hydro-static levels, respectively. During stimulation the temperature drops by
tens of degrees Celsius and the pressure is elevated by thousands of PSI for all the
channels above the plug of a given stage.
As the refractive index of the fiber is
sensitive to pressure and temperature, one may question the reliability of comparing
the amplitudes between the two surveys. In section 3.7, we show that the difference
in refractive index between two surveys do not significantly effect the measurements
provided the refractive index is constant during each survey.
However, refractive
index changes during the post-stimulation survey as the temperature fluctuates in
the well. The additional optical phase-lag due to temperature variation is a lowfrequency signal (< 2Hz) and shows up as the DC bias and does not interfere with
the higher frequency signal (6-80 Hz) from the Vibroseis sweep.
If the amplitude changes were due to pressure or temperature, they should disappear after the temperature and pressure recover to their pre-stimulation levels.
However, from global time-lapse attributes we note that the amplification and attenuation last for over a period of 10 days, which is sufficient time for the borehole
temperature to have recovered. Also, note that we also observe these changes in the
pre-stimulation global attributes (see Figure 4-31a) even though they were collected
at stable pressure and temperature conditions. In addition, the temperature drop at
all the channels above the plug for a given stage are comparable and it is not clear
why channels immediately above the plug show amplitude changes. All these observations suggest that amplitude changes are not associated with the temperature and
pressure changes.
160
Spike noise
The energy from remnant spikes in the uncorrelated data will spread to all times
when correlated with the Vibroseis sweep and may cause amplitude changes in the
correlated data. As with the temperature changes, spike noise is predominant above
the bottom perforation of a given stage.
If spikes were the cause for time-lapse
changes, then when a post-stimulation stack is compared with the global baseline, we
expect to see time-lapse changes at channels only around the bottom perforation of
the current stage and not at deeper channels corresponding to earlier stages where
the data is spike free. However, this is not what we observe. In addition, we observe
the time-lapse changes in the pre-stimulation global attributes where there is minimal
spike noise. Hence, we conclude that the time-lapse observations are not caused by
the spikes in the data.
Effect of plug placement and perforation
Though care is taken to align perforation shots to be away from the cable, it is possible
that a perforation shot may damage the cable. Similarly, the plug may exert excess
pressure on the cable and pinch it causing the fiber to respond differently. In section
4.6.2 we argued that the observed time-lapse changes are not caused by perforation
or plug placement. However, the plug may be further activated during stimulation as
the fluid pressure is increased and pinch the cable resulting in decreased amplitudes.
For most of the stages, the plug and the bottom perforation are within a DAS
channel and we cannot distinguish between them. However, for stage 3 (see Figure 42) the plug is about 700 ft away from the bottom perforation. For stage 3, observe that
the zone with decreased amplitudes (see Figure 4-26) is around the bottom perforation
(channel 480) and not at the plug (channel 504). So, we conclude that the transition
from amplified zone to attenuated zone happens at the bottom perforation and that
the plug does not effect the observed time-lapse changes.
161
Cement and Cable property changes
The DAS system measures the axial strain in the optical fiber which is coupled to
the formation through the cable that encloses it and the cement layer in which the
cable is installed. Changes in mechanical properties of the cement and cable may
alter the recorded signal for the same wave-field in the formation. In section 3.7 we
studied this problem and show that the cable and cement property changes do not
significantly effect DAS measurements since the axial strain has to be continuous
across the interfaces (when they are thin compared to the wavelength) regardless of
the layer properties. In this analysis we assume that there is no slip between any
interface. When there is a slip, we expect a decrease in amplitude of the recorded
signal. We call this coupling loss.
The decrease in amplitude below the bottom
perforation may be explained by the damage due to stimulation causing the cable
to slip against the cement. However, this doesn't explain the increase in amplitude
within the stimulated zone and raises the question why coupling changes happen at
the bottom perforation but not throughout the stimulated zone. Probably coupling
changes occur in the stimulated zone as well, but are masked by the amplification in
the zone.
The processing flow
Finally, the observed changes may come from artifacts in processing the data: wavefield separation, matching filter or FX-deconvolution. We analyzed the data through
multiple process flows with and without various steps in the processing workflow,
as well as just the correlated stacks without any processing. We observed the same
time-lapse changes with varied level of noise.
None of the factors discussed above contribute to the observed time-lapse changes.
We believe that at least a portion of the observed time-lapse changes are due to
formation changes and discuss the possibilities in the following section.
162
4.7.2
Formation changes
Hydraulic stimulation creates a stimulated volume around the borehole with enhanced
permeability. This is achieved by fracturing the rock using pressurized fluid and thus
we expect the fracture/crack density to increase within the stimulated zone after
stimulation. Increased crack density causes a decrease in the P- and S-wave velocities
and an increase in attenuation due to scattering from the cracks. At the depths of
hydraulic stimulation, the minimum stress is horizontal and the hydraulic fracture
growth is sub-vertical. Ideally, we expect a large vertical fracture with a damage zone
comprised of vertical cracks oriented along the maximum horizontal stress direction.
Such a preferentially oriented set of cracks causes velocity anisotropy with a significant drop in P-wave velocity in a direction perpendicular to the crack normal. In
addition, scattering from a large hydraulic fracture would be maximum when the wave
is incident along the normal to the fracture plane (X. Fang, Shang, & Fehler, 2013).
In the current geometry, the down-going P-wave travels parallel to vertical fractures
and is not well suited for monitoring a zone containing vertical fractures. However,
stimulated zones are more complicated than a simple model of vertical fractures, often with intersecting fractures oriented in different directions. Assuming randomly
oriented cracks in the stimulated zone may be a reasonable approach for investigating
our observations.
Several authors have related crack density (given by pc =
Na3,
where N is the
number of penny shaped cracks of radius a within the representative volume V) and
crack porosity to elastic moduli of an effective medium comprised of rock matrix
and cracks (Kuster & Toks6z, 1974; Hudson, 1981; O'Connell & Budiansky, 1974).
Kuster and Toks6z (1974) obtained the effective medium properties by using a long
wavelength single scattering approximation (Raleigh scattering) and estimated attenuation due to geometrical scattering by using the model by Yamakawa (1962).
Hudson followed using a scattering analysis of the mean field to derive expressions for
163
Measurement
system factor
Pressure
and
Temperature
changes
Why it does not explain observations
* Global time-lapse attributes show amplitude changes
at channels corresponding to early stages even after
recovery of pressure and temperature at those depths.
* Global time-lapse attributes for pre-stimulation stacks
show amplitude changes in regions that were previously stimulated even though pressure and temperature are stable before stimulation.
Spike Noise
9 Global time-lapse attributes show amplitude changes
at deeper channels corresponding to early stages where
the well is calm and a few spikes are observed.
* Global time-lapse attributes for pre-stimulation stacks
show amplitude changes in regions that were previously stimulated when the well is calm and a few spikes
are observed.
Perforations and
Plug
* Stacks obtained before and after a stage is perforated
do not show amplitude changes. Same is the case for
plug placement.
9 Amplitude changes happen at the lowest perforation
during stimulation and not at the plug.
Cement
and
cable
property
changes
* Strain along the borehole axis is continuous across the
thin layers (cement, cable) and the elastic properties
of the layers do not significantly effect the strain measured by the optical fiber.
Processing workflow
*
The amplitude changes are found to be robust for different workflows and even the raw data showed amplitude changes.
Table 4.1: Effect of Measurement system factors on time-lapse changes
164
P- and S-wave velocities as well as attenuation for both randomly oriented cracks and
cracks with a preferential orientation. Both the scattering models are for low crack
density (pc < 0.1) and assume no interaction between cracks. O'Connell and Budiansky (1974) proposed a self-consistent model that is applicable for larger crack density.
However, this is a static effective medium model and does not give estimates of attenuation due to wave propagation. Schoenberg (1980) developed effective medium
models for cracked mediausing a linear-slip assumption for the fracture boundary
conditions. Schoenberg and Douma (1988) showed that Hudson's model and Schoenberg's model are related. Grechka and Kachanov (2006) compared Hudson's model
and Schoenberg's model using finite element analysis and showed that Schoenberg's
model is superior. They also showed that the no interaction assumption made by
earlier theories works well even for intersecting fractures.
We begin by assuming that the cracks due to hydraulic stimulation are randomly
oriented and use the Kuster- Toksdz model (Kuster & Toksdz, 1974) and Hudson
model (Hudson, 1981) to relate crack density to P-wave velocity changes. We find
that the effective medium models are in agreement and give velocities within 10 m/s
for P-wave and 5 m/s for S-wave for a given crack density. Then, we assume a crack
radius and obtain attenuation due to geometrical scattering using Hudson's model.
The decrease in P- and S-wave velocity depends on the crack density whereas the
attenuation depends on the crack radius relative to the wavelength as well.
To study the time-lapse changes caused by stimulated volume, we treat it as a
fractured low velocity layer sandwiched between background model (V=4000 m/s,
V,=2400 m/s and p=2550 g/cm 3 ) on the top and the bottom and consider normal
incidence of P-wave (see Figure 4-29). The wave is amplified as it enters the low
velocity layer as given by the transmission coefficient T12 . However, as it passes back
into the higher velocity background medium, it almost recovers its original amplitude.
A small portion of the energy is lost during passage through the layer due to reflections
165
at the interfaces. The final amplitude of the wave in the bottom layer is given by
T12 x T2 1 accounting for transmission at the two interfaces. This model is qualitatively
consistent with our observations: increase in amplitude within the stimulated zone
and decrease in amplitude below the zone. The transmission coefficients for strain
are derived in Appendix C and are given by
T2
-
T21-
a1
2pia1
plal + P2a2 a2
2
P2a2
a2
Piai + P2a2 a,
(4.2)
(43)
The percentage change in energy 4 due to the presence of low velocity layer is given
by (T122 - 1) x 100 and ((T12 T2 1) 2 _ 1)) x 100 for the middle and bottom layers,
respectively.
We first estimate the percentage increase in energy in the fractured layer for
different crack densities and pick the crack density (Pc = 0.04) that corresponds
to 15% increase in energy in the stimulated zone, as observed in the field data.
This corresponds to a P-wave velocity decrease by 4.67 % (V = 3813m/s) and Swave velocity decrease by 3% (V, = 2327m/s) in the fractured layer. For the same
parameters the decrease in amplitude of the wave transmitted into the bottom layer
is less than 0.2%. Thus, reflections alone do not explain the observed decrease in
amplitude (around 20%) that we observe in the field data.
Note that we did not
consider attenuation due to cracks in this analysis, yet. For a given crack radius, the
attenuation factor N in the fractured zone can be estimated using Hudson's model.
Then, the amplitude change due to attenuation over the fractured layer is given by
e-'ych, where h is the thickness of the fractured layer. The length of the amplified
4
Note that there is no actual increase in energy in the low velocity zone. The wave has larger
amplitude over smaller spatial distance (wave-length) in a low velocity medium. However, when
recorded on a seismogram the pulse spans the same length in time and has larger amplitude when
recorded in a low velocity medium. The energy of the recording may look to have been increased,
but there is no actual increase in energy and energy is conserved across the interfaces. This is true
for the energy time-lapse attribute we presented for the field data.
166
zones in the field data is on an average 200 m and we take this as a layer thickness
to estimate the attenuation due to geometric scattering in the layer. Since the net
amplification in the amplified zone is 15% on top of the 20% decrease in amplitude
due to scattering from cracks, we require that the velocities should change such that
the amplification due to velocity change is 35%. This gives us a crack density of 0.08.
For this crack density, the crack radius that gives 20% attenuation is about 20 m. The
fractured layer properties corresponding to 0.08 crack density are Vp = 3616m/s and
V, = 2252m/s. In such a model, the DAS channels located within the fractured layer
record 15% increase in amplitude and all the DAS channels located in the layer below
record 20% decrease in amplitude. However, in the field data, the zone of decreased
amplitude is confined to channels just below the bottom perforation. In reality, the
fractured volume is more like a finite sized ellipsoidal anomaly in the background
model and the amplitude effects may be caused by diffraction around the stimulated
zone as well.
We numerically studied the amplitude changes due to a low velocity anomaly by
comparing synthetic seismograms from finite difference simulations with and without
an anomaly of size 200 x 200 x 200 m 3 centered about the borehole/receivers. The size
of the anomaly is taken to be comparable to the wavelength. Note that we compare
axial strain at the channels to mimic the quantity measured by DAS. We took the
properties of the anomaly as V=3813 m/s and V,=2327 m/s, corresponding to a
crack density of 0.04 as we do not consider crack attenuation in this model. The
background model is taken to be the same as in the previous section. The effect of
the velocity anomaly is to focus energy below the anomaly. We observe increased
amplitudes in the anomaly as well as below the anomaly for distances up to 5 times
the anomaly size. We also observed travel time delays at channels immediately below
the anomaly.
All the models described above are inconsistent with our observations on time167
shifts. In the field data, we do not observe significant time-delays associated with the
decrease in velocity in the fractured zone. For a P-wave velocity drop of about 400
m/s in a 200 m thick fractured zone, we expect a travel-time delay of 5 ms for channels
below the fractured zone. At the same time, as stages are progressively stimulated
we accumulate more fractured rock above deeper channels. First, we should observe
increasing time-delays at deeper channels when compared to global baseline data and
second, the attenuation should also progressively increase as the wave passes through
more fractured rock. From the global attributes, we observe that the decrease in
amplitude remains the same with time foe deeper stages and there are no time-shifts.
Thus, we do not expect such large velocity changes in the stimulated zone and also the
decrease in amplitude observed in the field data is probably not because of attenuation
due to geometric scattering. It appears to be a local phenomenon, more likely caused
by a decrease in cable coupling.
We need to identify models that cause amplitude changes in the stimulated zone
but which do not cause travel-time delays for the channels below the zone.
The
models that fit this description are 1) a fractured zone with vertically oriented cracks
2) density perturbation in the stimulated volume with little velocity change and 3) a
large vertical fracture due to hydraulic fracturing. Vertically oriented cracks induce
velocity anisotropy with decreased velocity along the normal to the cracks and less
decrease in velocity along the direction parallel to the cracks.
We estimated the
velocity anisotropy using Hudson's model for a crack density of 0.04 and repeated
the finite difference simulations with an anisotropic anomaly. Though the resulting
model does not cause time-delays, we still observe a strong increase in amplitudes
below the anomaly and the amplitude changes within the anomaly were too small to
be consistent with the field observations. Increase in crack density causes decrease
in elastic constants as well as decrease in the density of the rock. If the percentage
decrease in elastic constants is equal to the percentage decrease in the density, the
168
velocity of the medium remains constant. Under this assumption, we simulate the
effect of density anomaly.
For this model, we see an increase in energy by 15%
within the stimulated zone and a decrease by 1% below the stimulated zone when the
density is reduced by 300 g/cc (~ 12% ). This model is qualitatively consistent with
the observations from the field data.
However, decrease in density by 12% would
mean an increase in crack porosity by the same amount which is unrealistic.
The
final model we consider is a single large vertical fracture which satisfies linear-slip
boundary conditions across the interface. We numerically studied the changes due to
a vertical fracture 200 m in height and length, and take the fracture compliance to
be 10- 9 m/Pa. Such a large fracture causes an increase in energy of the down-going
wave by 30% within the stimulated zone and small increase in energy (5%) below the
fracture. The time-delays caused by the fracture are small (less than 1 ms) and are
consistent with the field observations. None of the models considered individually can
completely explain the field observations. However, models with either a low-density
anomaly or a single large fracture come closest to fitting the observations
Table 4.2 summarizes the conclusions from the modeling of formation changes.
The observed changes are systematic but we are not sure which changes are due to
bulk rock stimulation and which are due to local coupling and fiber effects.
Our
observations suggest that the observed decrease in amplitude below the plug is more
likely a coupling effect. We do not have strong indicators to argue if the amplification
above the plug is due to formation changes or other effects. Assuming that amplification is related to formation changes, we compiled the length of the amplified zone
in each stage to represent the height of the stimulated zone (see Figure 4-30a) and
also the magnitude of the % Energy change to represent the extent of perturbation in
the formation properties (see Figure 4-30b). These diagnostics appear to be weakly
correlated with the amount of fluid and proppant pumped into each stage. Pumping
more fluid and less proppant correlate positively with the length of the amplified zone
169
and the energy changes. We do not have access to the production log to verify if the
stages with larger changes in the time-lapse attributes performed better.
Considerations for future surveys
In the current study, we argue that the decrease in amplitude below the stimulated
zone is due to coupling. This can be further confirmed by analyzing the waves generated by reflections below the stimulated zone that then pass through the stimulated
zone propagating upwards. If the observed decrease in amplitude were due to either
diffraction around an anomaly or due to attenuation within the anomaly, we would
expect to observe a decrease in amplitudes at channels above the stimulated zone as
the reflections pass from below. If the decrease in amplitude were due to coupling
changes, we expect it to be observed below the stimulated zone at the same channels
as for the direct P-wave. We also recommend collecting a cement bond log after the
completion of stimulation in order to evaluate cement damage and coupling changes.
More importantly, the survey geometry should be modified to include larger offsets. Larger offsets would allow P-wave incidence at an angle closer to the normal
of the vertical fracture. The scattering from a vertical fracture is larger for close to
normal incidence. DAS is most sensitive to shear waves when the angle of incidence
is 45'. So, larger offset geometries will record better S-wave data. S-waves are more
sensitive to scattering from fractures and will provide better constrains.
4.8
Conclusions
This study represents the first ever attempt to monitor hydraulic fracturing with
an active seismic source and DAS cable as seismic sensor in a treatment well. The
field trial showed that excellent quality VSP data can be recorded in a hydrofrac
treatment well. We showed that DAS channel depth can be reliably calibrated (up
170
to single channel accuracy) using either tube-wave reflections or DAS DC bias. The
major sources of noise appear to be spike-like noise probably due to optical hardware
difficulties, that is accentuated under noisy conditions.
However, a simple spike-
removal algorithm does an excellent job of removing the spikes, partly because of the
long raw records obtained with a single vibroseis sweep. DAS data are contaminated
by signal due to temperature fluctuations that results in DC -bias, but this does not
affect the final seismic records and actually is useful in calibrating channel depths. We
observed systematic amplitude effects in the time-lapse VSP data that correlates with
well operations. These systematic amplitude changes appear to have greater spatial
extent in the well than conventional fracture diagnostics, on a scale similar to the
spread of micro-seismic cloud. In particular, we observe P-wave amplification above
the bottom perforation of each stage and attenuation below it without significant
phase changes at the channels below the stimulated zone. These time-lapse changes
are permanent over the period of well stimulation (over 10 days). Interpreting the
observed changes in the seismic data in terms of formation changes is challenging.
None of our models for formation changes explain both the amplitude and phase
changes. However, we cannot rule out single large vertical fracture. We argue that
the zone of attenuation below the plug is more likely due to coupling changes. The
amplification in the stimulated zone weakly correlates with the amount of fluid and
proppant pumped. It is likely that the size of the amplified zone is related to the
stimulated volume. The geometry of this VSP acquisition was not optimal, especially
for studying changes in S-waves, which may be stronger than those in P waves. A
future experiment with sources at a larger offset may yield a more complete time-lapse
picture.
171
Observations
Model
A
B
C
Comments
Layered model with random crack orientation for stimulated layer (pc = 0.04). Attenuation due to cracks not considered.
Layered model with random crack orientation (Pc = 0.08). Attenuation due to crack
scattering considered.
yes
no
no
The model requires observable time-delays
below the stimulated zone.
yes
yes
no
anomaly
low-velocity
Finite
sized
(200mx200mx200m) caused by randomly oriented cracks; Attenuation due to
crack scattering not considered.
yes
no
no
The model requires observable time-delays
below the stimulated zone and increasing
time-delays as well as increasing attenuation in global attributes as more and more
stages are stimulated above a given channel. Also, it requires that all the channels
below the stimulated layer show decrease
in amplitude. These predictions are not
supported by the observations.
The model requires observable time-delays
below the stimulated zone and increasing
time-delays as well as increasing attenuation in global attributes as more and more
stages are stimulated above a given channel. The low velocity anomaly focuses energy and causes increased amplitude below
the anomaly. These predictions are not
supported by the observations.
Continued in next page
Finite
sized
low-velocity
anomaly
(200mx200mx200m) caused by vertically oriented cracks; Attenuation due to
crack scattering not considered.
I'
no
no
yes
Within the stimulated zone/ anomaly, the
amplification is very small compared to
observations. The low velocity anomaly
causes increased amplitude below the
anomaly. These predictions are not supported by the observations.
Finite
sized
low-density
anomaly yes
yes
yes
For a decrease in density by 12%, the in(200mx200mx200m); Attenuation due to
crease in amplitude within the stimulated
crack scattering not considered.
zone is 15% and the decrease in amplitude
below is 1%. However, such large density
perturbation is unrealistic.
Single
large
vertical
fracture yes
no
yes
For a compliance of 10- 9 m/Pa, the time(200mx200m).
delays are below 1 ms at channels below
the stimulated zone. The model qualitatively agrees with the observations if the
decrease in amplitude below the stimulated
zone is caused by coupling changes.
Coupling changes between FO cable and no
yes
yes
The increase in amplitudes above the botcement.
tom perforation require coupling to increase after stimulation which is unlikely.
The decrease in amplitudes below are
probably due to coupling changes as the
cable may not be perfectly bonded with
the cement after stimulation.
A: Amplification above lowest perforation
B: Attenuation below lowest perforation
C: No time-delays
Table 4.2: Summary of conclusions from models for formation changes
4.9
Figures
J>
LUJ
z
STRATIGRAPHIC 0 L DEPTH
UNIT
(in feet)
- 4000
EU
UP
-
C
-i
6000
0<
DOMINANT
LITHOFACIES
Nonmarine
sandstone and shate
j- 8000
Marginal-marine
and sha
sandstone
e
C
10,000
Marine s tstone
and shale
UNCONFORMITY
-12,000
(n,
U)0
0j
-14,000
E
W
--
.16,000
- 18,000
TOTAL DEPTH 19,000 FT
Figure 4-1: Stratigraphic sequence at the El Paso Natural Gas Company Wagon
Wheel No. 1 well located in the Pinedale Anticline. The figure is borrowed from Law
and Johnson (1989).
174
Stages with time lapse
DASVSP
Plug Locations
Ground Level
Z
Z
M
Z
M
Z
Z
Z
Z
Z
Z
1'19
17
I
16
15
-3899 ft
I
14
13
12
Z
M
Z
0
CU
11
10
9
8
7
-7550 ft
-9183 ft j
Outer Casin g
*
-
U,
Intermediate
Casing
Production
Casing
Mud/Fluid
Cement
FO Cable
0
N
6
5
4
-0
c
0
3
U)
E
-
:-
7-
-13601 ft
2
1
I-U co
H~l
'
hd
LO
~~
~-
Figure 4-2: A schematic diagram of well completion and the FO cable placement.
A scaled diagram of plug locations for all the stages is shown in the inset of the
stimulated zone.
175
1400
150
1200
1000.
800
600
FL
CL
a
0
400
50
200
3
5
7
9
11
Stage #
13
15
17
19
1
3
5
7
9
11
Stage
13
15
17
#
1
(a) Fluid pumped
(b) Proppant placed
Figure 4-3: Fluid and proppant placed in the formation during the stimulation of
each of the stages.
Well Head
010 Min. Horizontal
Stress
Stress Dire
Dire - nn C
,
500
0
q)-500
B*
1000
Vertical
of
the well
-1500 rsection
-2_____
0
1000
2000
Easting (ft)
Figure 4-4: Plan-view of the well and the source locations A, B and C.
176
19
C 1500
2000
1W
4W
aJJ
OWI
DL
OWV
- 1001
E
0
72 200
0)
8
-0,1
c 300
-0.2
4001
100
200
300
400
500
I
0
E
0.5
400
500
I
2
3)
0
0
0
0
4)
00
0.5
-M__.
100
200
300
Channel
400
(c) Uncorrelated sweep during stimulation
'a5000
(d) Correlated sweep during stimulation
a10(
0.5
E
10000
0
20(
0
0
(D
c15000
-0.5
Ir 30(
Bottm
200
300
Channel
400
500
100
#
100
-0. 5
500
#
#
200
300
Channel
-0.5
(b) Pre-stimulation correlated sweep
0.5
100
0
#
(a) Pre-stimulation uncorrelated sweep
20000
I
I
Channel
#
Channel
I
I
0.1
0.5
-
1000
0.2
(e) Post-stimulation uncorrelated sweep
200
300
Channel#
400
500
I
I
10.
5
0
-0.5
(f) Post-stimulation correlated sweep
Figure 4-5: Uncorrelated and correlated sweeps before, during and after stimulation
of stage 9 for source at location B.
177
1
1-r_
C
-
0.5-
05
DC bias
0
(U
0)
-0.5-
E
-1.5
Spike
5000
0
10000
20000
15000
Record time (ms)
Figure 4-6: Uncorrelated trace recorded at channel 403 in the sweep shown in Figure
4-5e.
8
0.4
A
"9
0.2
10
44, 10Stage Sae 9 bottom pe oration
0
111
C
212
D
a) 13
o om pe oration
age
E
- 14
15
400
450
250
300
350
-0.2.
500
-0.4
#
Channel
0
Figure 4-7: DC bias (one number per trace) for each shot-gather (vibroseis sweep) is
plotted against the time of day when the sweep was collected and the channel number.
DC bias is related to the activity in the well and depends on the phase of stimulation:
A) Pre-stimulation B) Fracture initiation C) Stimulation D) Post-stimulation.
178
()
0
0
a)
L..
2
- A
El
D
-- 10357 ft
9015 ft
7672 ft
6329 ft
1.5
1
0.5 F
CD
10
9
11
A PreB Fracture initiation
C Stimulation
I? Post-stirnulation,
12
13
14
15
16
Time of day (Hrs)
(a) Integrated DC bias at different depths (channels) is plotted against the time
of day.
A
3C
D
10357 ft
9015 ft
7672 ft
6329 f
-
0) -40
C
CO)
(D
E
-20-
9
10
11
12
13
14
15
16
Time of day (Hrs)
(b) Temperature at different depths (from DTS) is plotted against the time of day.
Figure 4-8: Integrated DC bias qualitatively follows the temperature measured in the
well using DTS.
179
(D 0.2
0
-0
S0
-20-
E -0 .2
- -0.4
0)
-60-
N -0.6
-80
0
--- ---
-
-40-
E -0.8
-100 -50
-100
-50
0
0
50
50
100
100
150
150
time (ms) from peak
Z
200
250
-1 I
-100
-50
0
50
100
150
200
250
Time (ms) from peak
(b) Normalized spikes in field data
(a) Spikes in field data
0.51
(D
-10
0
-20
E
0
-30
-4
0
0
100
200
300
100
200
300
time (ms) from Deak
-0.5
Blue: Lab data
Red: Field data
'
-
0
Z
.
E
E
50
400
(c) Spikes in lab data
100
150
200
Time (ms) from peak
250
300
(d) Comparison between spikes in lab and field
Figure 4-9: Spikes in the field and lab data are plotted aligned at the peak. When
normalized by the peak amplitude spikes in the field and lab fall on the same curve.
180
O.E
x 10
Down-going tubewave
1.55g
1.55
location
(D
E
72
0
Q
E
1.2
1.6
0
a:
1.4
P!oig
1.65j
100
200
300
400
500
360
380
400
Channel
420
wave.
440
#
#
Channel
tp
(a)
(b)
X 104
girft
1.52
h
1.54
O
000
1.56
Oon-gping t-Obewa me
Q
1.58
10
20
30
40
#
Channel
(c)
Figure 4-10: Shot-gathers showing (a) Tubewave generation during the perforation
shot for stage 9. (b) Tubewave reflection at stage 9 plug (c) Tubewave reflection at
the surface
CO
0
0I -10
-20
100
200
30D - -
400
500
0~
-D -10425
0Oom perforation at channel 432
-
0
O -20
430
435
440
#
Channel
Figure 4-11: DC bias is plotted for a sweep after stimulation of stage 9. Jump in DC
bias can be observed at the bottom perforation (channel 432).
181
6000
500
Plug location using Tubewaves
Perforation location using DC bias
*
Channel spacing:
8. 187 m
0
12000450
10000
-
c
Cu
C
C
*
9
+
8000
-
*
9
9
'1
13
11
Stage
13
15
'
17
6000
250
19
300
#
'
7
-
5
5
'
3
3
#
350
Field Estimated Depths
Channel Depth from Plugs
Calibrated Channel Depth
500
350
400
550
450
Channel
-
400*
0
*0
#
.i3
C
(b)
(a)
Figure 4-12: a) Channels corresponding to plugs/perforations at each stage as identified from tube-wave reflections and DC bias changes. b) Calibration plot for DAS
channels. Red dots are the receiver depths estimated in the field. Blue dots are the
depths of the same channels after associating with a plug/perforation depth. Red
crosses represent the depth of the same channels after assigning depth from the bestfit line to the blue dots. The slope of the best-fit line implied a channel spacing of
8.19 meters.
Raw Data
(Downsampled to 1 kHz)
Align direct P- and S-arrivals
to obtain P and S travel times
velocity model
&
....
Filter DC bias
'Ir
Separate up and downgoing
waves using median filter
Remove spikes & Clip Noise
0,
Apply zero-phase
bandpass filter (4-10-70-80 Hz)
Obtain Qp-model from
direct P-wave
.
C
Median-stack the sweeps
'Ir
Match time-lapse data by building
matching filter using direct P-wave
Correlate with sweep signal
Apply median filter
to remove optical noise
Apply FX-Decon filter
to enhance coherent events
Extract time-lapse attributes
(data difference, energy changes
and time-shifts)
-
F-
Figure 4-13: Data processing workflow for time-lapse analysis of DAS data.
182
-
-- ______ - ................
I
I
T 5000
0 10000
I
X 15000
20000
100
200
300
0
500
0.5
5000
01
100001
-0.5
15000
41
-1
WINKNI
-----
0.5
016
I
I
100
200
300
Channel
400
500
0
I
-0.5
#
#
Channel
I
(a) Down-sampled uncorrelated sweep
(b)
Uncorrelated sweep after DC bias and spikes are re-
moved.
I
5000
* 10000
M 15000
"
2000 0
200
300
Channel
400
500
0.01
I
0
E
0)
0
E
0
0.01
c
-0.02
100
200
300
400
500
#
(c) Uncorrelated stack of 32 sweeps
(d) Correlated stack with optical noise
0.05
E
-0.05
Channel
#
100
0.05
0.02
500
0.05
E
(D
E 1000
E
0
.
0
72
0
0
72
0
1500
100
200
300
Channel
400
500
-0.05
100
300
Channel
200
400
500
-0.05
#
#
2000
(e) Correlated stack after filtering optical noise
(f) Correlated stack after FX-deconvolution
Figure 4-14: Data at various stages of the processing workflow in the order from (a)
to (f). Note the different time scale on correlated data and uncorrelated data. The
color scale on the correlated stacks is saturated to bring out the reflections that are
lower in amplitude (~ 0.05) compared to the direct P-wave (~ 1). We did not apply
any amplitude gain control.
183
0.05
0)
E
0
0
100
200
300
400
500
-0.05
#
Channel
(a) Source at A
0.05
500
E
a
1000
-2 1500
0
(D
200
100
300
400
500
-0.05
#
Channel
(b) Source at B
0.05
500
E
a 1000
E
0
1500
0
2000
2500
100
200
300
400
500
-0.05
#
Channel
(c) Source at C
Figure 4-15: Pre-processed stacks before the stimulation operations started in the well
and serve as baseline. Stacks corresponding to sources at the three source locations
are shown.
184
.
..
..
.. ....
0.05
0.05
500
1000
E
E
00
E
0
1500
.
2000
300
350
400
Channel
450
500
250
300
350
400
Channel
450
-0.05
500
#
#
250
-0.05
(a) Total wave-field
(b) Down-going P-wave
0.05
E
E
0
)
.
0
0.05
E
E
250
300
350
400
Channel#
450
-0.05
500
250
300
(c) Up-going P-wave
350
400
Channel#
450
500
-0.05
(d) Down-going S-wave
0.05
500
0.05
1000
CO)
E
E
0
.
0
.
E
1500
2000
250
300
350
400
Channel#
450
500
-0.05
(e) Up-going S-wave
250
300
350
400
Channel#
450
500
-0.05
(f) Remnant noise after extraction of phases
Figure 4-16: Wave-field separation using median filter. The red line in the figures
denotes the arrival time of the direct P-wave.
185
I
0.4
0.2 F
E
Total wavefield
Down-going wave
Up-going wave
Wi idow for
sp 7ctral estimation
an J matching filter
0 H_
-0.2 F
Dire t P-wave
-0.4
800
600
1000
P-wave reflections
1200
1400
1600
1800
Record time (ms)
Figure 4-17: Up- and down-going P-wave traces at channel 350 for baseline data
collected from source location B shown in Figure 4-16
100
E
200
c
300
400
2010
250
250
300
300
400
350
350
400
Channel#
450
500
(a)
E 100
E
ITO
200
300
40
250i3007350
250
300
350
400
Channel
450
500
#
400
200
(b)
Figure 4-18: Individual traces of the aligned down-going P-wave (a) before and (b)
after removal of remaining phases. The traces are taken from baseline stack collected
from source location B shown in Figure 4-16
186
---- _Channel 250
Channel 300
Channel 350
Channel 400
- - - Channel 450
- - - Channel 500
0-10-:.
5
-20
0
O
EL -30
-40
-50
0
20
60
40
Frequency (Hz)
80
100
Figure 4-19: The spectrum of down-going P-wave as a function of depth (channel)
for the traces shown in Figure 4-18b
187
-
Source A
Source B
Source C
Source A
=
Source B
Source C
350
350
19
18
17
3 75-
350
375
375 --
400
400-
19
17
375 --
16
16
15
15
14
400
350
400-
13
12
11
4 25- 10
9
C
Cs
8
-c
0
7
450-
14
13
12
11\
425 10
.-
425-
425
9
8
C
C
C
Cs
0
C
C
Ca
0
450
450
450
I
I
5
4
4 75-
475
475
475
500
500 --
3
5 00--
5002
2
1
3500
4000
V (m/s)
4500
(a) P-wave Velocity
2000
3000
V, (m/s)
(b) S-wave Velocity
20 40 60
Average Q
(c) Average
80
Q factor
20 40 60 80100120140
Interval Q
p
(d) Interval Q factor
Figure 4-20: Medium P-, S-wave velocities and P-wave quality factor are plotted
against the channel number (increasing depth). The plots for velocity show velocity
estimates from data at all the three source positions. The Q factor plots show the
mean Q-value obtained from the data collected at the three source positions with the
error bars denoting the standard deviation between the measurements. The stage
numbers are labeled in the figures. The horizontal black lines denote the plug locations. All the four plots are to the same scale.
188
Sequence of well operations
older
-
* Global baseline DASVSP
Well drilled and cased
Stage 1 plug placed
Stage 1 perforated
Pre-stimulation DAS VSP
tA
Stage 1 stimulated
In
Post-stimulation DAS VSP
Ei
FC
4-.
Stage 2 plug placed
C:
e
-I
Stage 2 perforated
Pre-stimulation DAS VSP
E
i)
-o E
0
Stage 2 stimulated
U
Post-stimulation DAS VSP
Stage 3 plug placed
later
-J
Baseline Stack
Monitor Stack
Figure 4-21: Timeline of well operations and illustration of local and global time-lapse
attributes.
%
AE
#~-~
1>
~-
E 100
()
E
W
0
'0
W0
cc
200
J
,,~
300
300
400
350
Channel
450
500
10
E
0)
E
0
0
-10
-0.05
OI
-20
'+UU
Channel
#
-
400
250
I
I
20
#
~-
0.05
(b) % Energy change
(a) Data difference
Figure 4-22: Time-lapse changes between repeated stacks during stage 12.
The
changes are due to noise as no well operations occurred between the two stacks.
The vertical black line identifies the location of the plug/ bottom perforation. The
dashed horizontal line represents the first break time of the down-going P-wave.
189
%
AE
100'
0)
E
o 200
a)
0
300
A0Af
250
300
350
400
Channel#
450
500
I
I
0.05
20
10
0
0
-1
0
-0.05
350
400
Channel#
(a) Data difference after plug placement
450
0
500
(b) % Energy change after plug placement
%
AE
E 100
First break
E
200
a:
300
40 "I
250
300
350
400
Channel#
450
500
I
I
0.05
20
10
0
0
-0.05
(c) Data difference after perforation
300
350
400
Channel#
I
-10
-20
(d) % Energy change after perforation
Figure 4-23: Changes in the direct P-wave before and after: plug placement, and
perforation operation of stage 16. The vertical black line identifies the location of the
plug/ bottom perforation. The dashed horizontal line represents the first break time
of the down-going P-wave.
190
E 100r,
(D
E
cc 300
350
400
Channel
450
500
E1000.1
0
0.3
0.2
0.1
0
200
-0.1
-0.1
c300
-0.2
-0.2
400
250
3
300
400
350
Channel
450
500
#
300
0.2
#
400'
250
I
I
I
0.3
(b) Post-stimulation stack
(a) Pre-stimulation stack
AE%
I
100
-9.
E
o
3
200
40
10.05
4)
E
0
0
4)
cc
ir 300
400
250
20
E
-20
-0.05
300
350
400
Channel#
450
300
500
350
400
Channel#
450
500
-40
(d) % Energy change
(c) Data difference
mS
0.5
I
E100.
0
200
300400
4".A
100
200
300
Channel
400
500
-0.5
#
I 0
i nDiIH
(e) Time-shift
Figure 4-24: Local time-lapse attributes for stage 16. The vertical black line identifies
the channel at which the plug/ bottom perforation is placed for stage 16. The dashed
horizontal line represents the first break time of the down-going P-wave.
191
0.5
0.4
0.2
(D
C)
0
E
0
IE
-0.51
150
-0.2
Pre-stimulation
Post-stimulation
-
Pre-stimulation
----- Post-stimulation
-0.4
200
Record time (ms)
250
150
200
Record time (ms)
250
(a) Trace above the plug has larger amplitude after(b) Trace below
the plug has lower amplitude after
stimulation
stimulation
Trace above the plug
-
- - - Trace below the plug
01
22
03
10
(c)
20
30
40
Frequency (Hz)
50
60
Spectral ratio of post-stimulation trace to pre-
stimulation trace
Figure 4-25: Changes in traces at channels above and below the plug of stage 16:
before and after stimulation.
192
.
.. ..
..
....
.......
..
AE%
0.5
30
1
20
2
3
2
10
5.
9.
5
ca 9
Cu
0
12
~~2I
-10
15
2 50
16
-20
16
19
300
400
350
450
19
-30
500
0
12-
250
300
350
450
500
Channel
#
#
Channel
(b) Time-shift
(a) % Energy change
(D
Cu
0)
400
. .. .
-.
.........-
350
400
Channel
450
500
#
300
-
.
1
2
3
5
9
12
15
(c) % Energy change
Figure 4-26: Summary of the local time-lapse attributes for all the stages. The black
asterisk in the figures represent the bottom perforation location for that stage. In
figure (b), the red vertical line denotes the location of the bottom perforation.
193
-0.5
A I%
ms
30
2
2
20
30)
9
12
0
5
9
CO
-10
15
16
(a)
300
350
400
Channel#
450
500
0
12
15
-20
16
-30
19
19
250
0.5
3
10
5
-0.5
'U
% Energy change for Pre-stimulation stacks
300
400
Channel#
350
450
500
(b) Time-shift for Pre-stimulation stacks
A L/
ms
30
2
20
2
3(D
0
CD
9
12
0
-10
16
-20
19
300
350
400
Channel
450
500
-30
0
0)
CD
9
12
0
15
-0.5
16
19
50
300
400
Channel
350
450
500
#
#
250
5
Cu
15
0.5
3
10
5-
(c) % Energy change for Post-stimulation stacks
(d) Time-shift for Post-stimulation stacks
Figure 4-27: Summary of the global time-lapse attributes for all the stages. The black
asterisk in the figures represent the bottom perforation location for that stage while
the red represents the same for the previous stage.
194
1
--
-1
time-delay, spectral changes
Down-going
direct P-wave
-
-4
-
+A
+-
diffraction
pattern
Up -going
I reflected P-wave
Time
S
Interface
Stimulated volume
Channel
(6)
(b)
Figure 4-28: (a) Diffraction pattern would be reversed for an up-going reflected wave.
(b) For a channel above the stimulated zone (shown in blue), direct P-wave and
reflected P-wave can be compared to study changes due to stimulation. Since both
the phases are recorded on the same channel at the same time, the analysis is not
effected by coupling and fiber response changes.
e i(wt-kz)
ii
44
I
I
I
I
N::
medium 1 Pa,
I
i(tkz)
E=T 1;Pmedium
Et= T,,, i(Wt-kz)
\
2 Pga2
medium 1 Pa,
4
Figure 4-29: Stimulated volume modeled as a low velocity layer sandwiched between
background layers.
195
lilllis
(D
000
C
0
N
a
a
a
a
15
(D
0)
400
'0
*300
CU
CU
0- 200
I1
0
S100
0
5
9
16
I
19
5
9
12
15
Stage
MM6
#
#
12
15
Stage
(a) Length of amplified zone
(b) % Energy change
Figure 4-30: Extent of the amplified zone and the amplification in each stage.
1400
x
1200
0
CL
E
20
100
1100
0
E
LC1000
-
+Data
Fit
140
120-
:
1300[
80
0
0
-
900
+
800
C-
- -Fit
-
40
a-
20'100
'
/fill'
100
60
Data
200
300
400
Length of amplified zone (m)
500
(a) Zone length Vs Fluid pumped
1400-
+
Data
Outlier
*
:3
LIL
-Fit
x 120 I
0 100
01100
0
E
L~ 80
S1000
0
900
600
+ Data
14n
-01200
E
300
400
500
Length of amplified zone (m)
(b) Zone length Vs Proppant pumped
Fit
1300
200
0
60
CL
e
0
I
0
0
800
Q-40
4
6
8
10
12
14
% Energy change
16
18
4
(c) % Energy change Vs Fluid pumped
6
8
10
12
14
% Energy change
16
18
(d) % Energy change Vs Proppant pumped
Figure 4-31
196
....
..
..
..
Chapter 5
Conclusions and Future Work
5.1
Summary of conclusions
The main motivation of the thesis is to enhance our understanding about fractures,
both natural and, man-made hydraulic fractures. In this pursuit, we addressed three
broad topics in this thesis. First, we began by exploring fundamental questions on
fracture compliance: How do we measure fracture compliance in the field?
Does
fracture compliance scale with the size of fracture? Second, we contributed to the understanding and development of DAS for VSP purposes. We systematically analyzed
the factors that influence DAS measurements, DAS response in different environments and applicability of DAS for time-lapse measurements. We foresee that DAS
will be an important tool not only for fracture characterization, but also for reservoir
monitoring in the near future. Finally, we applied DAS to study the stimulated zone
during a multi-stage hydraulic fracturing job in a tight-gas sandstone formation. DAS
allowed us to make seismic measurements within a stimulated zone which was not
feasible earlier. We addressed many practical challenges in using DAS for monitoring
hydraulic fracturing and set the stage for more complex field experiments using DAS
to study hydraulic fracturing. We summarize the broad conclusions for each chap197
ter below. For a detailed summary, the reader is advised to read the conclusions of
specific chapters.
In chapter 2, we studied tubewave generation at a fracture intersecting a borehole
due to an incident P-wave. For an infinitely long fracture, the amplitude ratio of the
generated tubewave in comparison to the amplitude of the incident wave depends on
the fracture compliance, fracture aperture, fluid viscosity and the frequency of the
incident wave. The amplitude ratio has a low- and a high-frequency behaviour and
the transition happens when the the viscous skin depth in the fracture is comparable to the fracture aperture. For a given borehole fluid, measurements made near
the transition frequency can constrain the fracture compliance and aperture. Measurements made in the high frequency regime can only place a lower bound on the
fracture compliance. For a finite length fracture the amplitude ratio as a function
of frequency follows the infinite fracture response, but with superposed oscillations.
Fracture length can be estimated from the periodicity and the decay of the oscillations
with frequency. We also studied tubewave attenuation across a fracture intersecting a
borehole and the same conclusions hold true. By applying this model to field data, we
showed that the in-situ compliance of the fracture is greater than 10 1 0 m/Pa. This
measurement supports scale dependence of fracture compliance.
In chapter 3, we studied the application of Distributed Acoustic Sensing for VSP
measurements. DAS measures strain or strain-rate in the optical fiber in a direction
along the length of the optical fiber, depending on how the DAS system is implemented. DAS measurements are equivalent to differential geophone measurements
when geophones are separated by a gauge-length. Since DAS measures strain in one
direction it is insensitive to P-waves incident normal to the FO cable and S-waves
incident parallel to the FO cable. DAS averages strain over a gauge-length and this
results in an upper limit on the frequencies that can be reliably measured. Sensitivity
of DAS measurements to the incident wave-field is different when the FO cable is
198
installed in the borehole fluid or when it is cemented outside the casing as it responds
to the pressure in the borehole fluid or the strain in the formation in the two cases,
respectively. Borehole effects (such as scattering due to borehole, azimuthal placement of the FO Cable) on DAS measurements are negligible when the frequencies are
below 300 Hz. However, the effects should be taken into account for frequencies above
500 Hz. The design of the FO cable influences the measurements when the cable is
installed in the borehole fluid. It has negligible effect when the cable is cemented outside the casing. DAS measurements are significantly effected by temperature changes
that occur during the recording of the seismic data. However, two surveys recorded at
different background pressure and temperature conditions, with the conditions being
stable at each recording, do not show significant differences. Also, for an FO cable
cemented outside the casing, the changes in cable mechanical properties or the cement elastic properties between two time-lapse surveys have negligible effect on the
time-lapse recordings. Thus, DAS is a reliable tool for time-lapse monitoring.
In chapter 4, we analyzed time-lapse DAS VSP data during a multi-stage hydraulic fracture job. We showed that the main noise in the data included optical
noise, a DC bias related to well operations and spike noise. The DC bias is caused
by the temperature fluctuations in the well during the data recordings. The temperature fluctuations are of low frequency content (less than 2 Hz) and can be filtered to
leave the seismic data unperturbed by the temperature effects. The spike noise can
be removed using de-spiking algorithms and median-stacking. Depth calibration of
DAS channels is another major challenge. We solved this using independent methods, one using the tubewave reflections at the plug for each stage and the second
using the DC bias variation with depth. A processing work flow was developed for
optimal removal of different noise types and makes time-lapse data sets suitable for
analysis. We observed an increase in amplitude of the down-going P-wave within the
stimulated zone and a decrease in amplitude below the lowest perforation of each
199
stage. We did not observe significant time-shifts associated with the change in amplitudes. The amplitude changes were not transient and remained for the duration
of the entire survey for over 10 days. Using observations in the data we show that
the amplitude changes are not caused by pressure and temperature changes between
the time-lapse surveys, the placement of the plug, the perforation operations or the
processing workflow. The amplitude changes are consistent with a decrease in velocity and an increase in attenuation within the stimulated zone due to increased crack
density. However, lack of time-shifts consistent with the required change in velocity
makes this interpretation questionable. The decrease in amplitude is consistent with
an interpretation of coupling change. We cannot rule out the case that the increase in
amplitudes are caused by a single large fracture. The survey geometry was not ideal
for monitoring changes due to a vertically fractured zone. However, the experiment
proves that it is possible to make good quality time-lapse DAS VSP measurements
in a treatment well and this sets the stage for future experiments with more optimal
geometry.
5.2
Future directions
The results of this thesis point to several important areas for future work given below:
On fracture compliance
Experimental validation of Thbewave generation and attenuation theory
Based on the tubewave generation and atenuation models we argue that fracture
compliance could be estimated when measurements are made in a transition regime.
Though it has been observed in the field that tubewaves are generated at a fracture
intersecting the borehole, all those measurements were made under the high frequency
limit assumption. It is important to demonstrate experimentally that the transition
200
frequency exists and that measurements can be made to obtain fracture compliance.
The transition from low to high frequency occurs at a higher frequency for a more
viscous fluid and a smaller fracture aperture. The challenge with observing the transition regime in the lab is that the fracture apertures in the lab are comparable to
that in the field, but frequencies used in the lab are on the order of 100s of kHz, many
times more than the frequencies in the field. One way to overcome this is to use a
fluid with large viscosity in the lab so that the transition regime can be observed at
frequencies used in the lab. Glycerol is a suitable fluid for this purpose. We drilled
a hole through two cylindrical blocks and stacked one on top of another with the
holes aligned. We placed an annular rubber spacer between the blocks and sealed it
from outside to simulate a fracture. Fracture aperture could be controlled through
changing the spacer thickness. We built two models one with lucite and the other
with concrete to mimick soft and hard formations, respectively.
Data is collected
using a pressure transducer in the borehole and using a P or S-source transducer as
source at the surface of the blocks. We successfully observed tubewave generation
and attenuation at the fracture interface. However, the tubewave amplitude ratios
followed the same behaviour for both water and glycerol. We concluded that this was
due to air bubbles trapped in the fracture and the compliance being controlled by air
rather than the fluids. Once the problem with air bubbles is solved, one can test the
theoretical model.
Another approach would be to conduct a field test in a well where the fractures
are previously identified and studied. Using low frequencies (below 50 Hz) for the
VSP survey will help test the theoretical models.
Interface waves for fracture characterization
Pyrak-Nolte and Cook (1987); Pyrak-Nolte et al. (1992) demonstrated analytically
and experimentally the existence of interface waves that propagate along the frac-
201
ture surface. For a fracture intersecting the borehole, one can estimate the fracture
size by observing the interface waves as they pass by the borehole multiple times
after reflecting back from the fracture tips. These measurements in the borehole are
possible with the advent of DAS. We numerically studied the excitation of interface
waves due to an incident plane wave and concluded that the inhomogenuous part of
the wave field is necessary to excite the interface waves. Similar to the excitation of
surface waves, the source should be close to the surface. For a pure plane-wave the
interface waves are excited due to the secondary source at the fracture tip caused by
scattering at the tip. The amplitude of the interface waves are a fraction of the scattered wavefield (< 2% of the incident plane wave) and are hard to detect. However, a
microseismic source located close to the fracture is an ideal source to excite interface
waves. We propose to study the excitation of interface waves due to microseismic
sources analytically and numerically for different source mechanisms and distances
from the fracture. Since interface waves decay away from the fracture surface, it is
important to do a sensitivity study for interface wave detection at the borehole.
Distributed Acoustic Sensing
Our understanding of DAS is evolving and there are several areas of research that
need to be addressed. We discussed the problem of FO cable hanging in the fluid
and coupled through fluid pressure. In practice, it is impossible to have the FO cable
hanging in the fluid without touching the borehole wall. An FO cable hanging in
the borehole fluid would be responding to both fluid pressure and the deformation of
borehole wall as it is coupled to the wall through friction. Another important area
is to experimentally study the effect of temperature, pressure and cable design on
DAS measurements. It is possible to enhance DAS sensitivity with an optimal cable
design. The most pressing area is to develop a multi-component sensor using DAS.
One of the approaches that is drawing attention is to use a helical cable. We can
202
extend our modeling work to helical cable geometry to understand DAS response in
such a setting.
For future trials to use DAS for hydraulic fracture monitoring, larger offsets are
required in order to have the P- and S-waves incident at an angle closer to the hydraulic fracture normal. In addition, larger offset will allow S-waves to be recorded
by the DAS channels. Remember that FO Cable is most sensitive to S-wave incident
at 450. We also need to explore for micro-seismic activity in the data collected in a
treatment well.
203
204
Appendix A
Tube-wave generation and
attenuation at a finite fracture
A.1
Tube-wave Generation
The theory described for an infinitely long fracture can be extended to a finite fracture.
We consider a penny-shaped horizontal fracture of diameter 2D intersecting a borehole
at its center. In this case, the differential equation for fluid pressure in the fracture
is still given by equation 2.5. For a finite fracture, we require the zero flow boundary
condition to be satisfied at r = D. As a result, the solutions to the homogeneous
form of equation 2.5 include incoming and outgoing waves. The complete solution
can be written as
p(w,r)
=
AHO ((r) + BH2((,r) +
Lo-.
The coefficients A, B are determined from the boundary conditions P(w) rR =and OI/rr=D
=
(A.1)
(W
0. Applying the boundary conditions, the equation for fluid pressure
in the finite fracture can be written as
205
p(wr) =
_,
-
= Z)
(W) L H3((r)H2(CD) - Hi(CD)H2((r)
p_ U Hi((R)H2(CD)
IPBw)
- H1((D)H2(CR)I Lo
+
Zeff
(A.2)
Following similar steps as for an infinite fracture, the expression for the equivalent
pressure source for a tubewave, for the finite fracture case, can be obtained as
W
=
i[EH((R) / HJ((R)
Ct LO pfca2
ao
Ut(w)
kraf aee R Lo / Z 1 + w -iOH ((R) / H ((R)
E
E=
[1
H(CR)H(CD)] /
H(R)H1 ((D)
1H((R) H 2((D) Hl (( R) H2((D)
-
.
(A.3a)
(A.3b)
Using asymptotic expansion of the Hankel functions for large arguments and neglect-
E
ing higher order terms,
1
-
1+
Thus, as D -+ oo,
E
can be expanded as
2
1
Im{}(D-R)e -i2Re{(}(D-R)
1 +e-2Im{(}(D-R)e-i2Re{(}(D-R)
ei 2 ((D-R)
ei2((D-R)
(A.4)
goes to unity, and the solution for the finite fracture case
approaches the solution for the infinite fracture case as given by equation 2.8. For the
high-frequency approximation, we take the high-frequency solution for the dispersion
relation from Tang (1990), and ( can be written as
neff
(A.5)
aeff~J I- (1- aeff 2 2LoLO
Using equations A.4 and A.5, E ~ 1-2ei2((DR)
=
1_-2[(w/aeeLo)(D-R)] i(2w/oe)(DR)
Thus, the spacing between consecutive peaks/troughs in the high-frequency approximation limit, in Hz, is given by
A
_
aeff
(A.6)
2(D - R).
The frequency at which the amplitude of the peaks/troughs is 1% of the amplitude
206
ratio from infinite fracture response
is given by
(A.7)
)
D-R)] = 0.01 =* Wd = 5.3
2e- I
A.2
wd
Tube-wave Attenuation
As discussed in Appendix A.1, the solution for a finite fracture involves solving the
differential equation for the pressure field in the fracture with a zero flow boundary
condition at r = D. The solution, including incoming waves and outgoing waves, is
given by
_(r)
_
(A8)
[ Ho (Cr)H2(CD) - H'(CD)HO2(Cr)
=Hl(CR)H2(CD) - H|(CD)H2(CR)
From equations A.8 and 2.3, the flow into the fracture at r = R is given by
H1 (CR) E).
4(R) = PuLO
kyrafpf
where
E
(A.9)
H01((R)
is as defined in equation A.3b. Hence, the impedance for a finite fracture
can be written as
p(R) >
F- < VF(R) >
ptt
4(R) / Lo
k2a 2P
Similar to the amplitude ratios in Appendix A.1,
Hkc
H(CR)
1
iwC HI(CR)E
E
(A.10)
causes peaks/troughs in the
transmission coefficient for a finite fracture. At the high-frequency limit, equation
A.6 again gives the spacing between consecutive peaks/troughs and equation A.7
gives the frequency at which the amplitude of peaks/troughs in
207
ZF
is reduced to 1%.
208
Appendix B
Layered Borehole Model
We solve the problem of P- and S- wave incidence on a layered borehole in Section
3.5.1. We describe the displacements and stresses in each layer in terms of scalar potentials and solve the displacement and traction boundary conditions at each interface
to obtain the solution. In the following sections we describe the displacement vector
in a homogeneous isotropic elastic solid in terms of scalar potentials. We then present
the displacement-stress matrix that relates the coefficients of the scalar potentials in
each layer to the tractions and displacements. Finally, we present the displacementstress vector that expresses the tractions and displacements on the incident wave-field
in terms of scalar potentials.
B.1
Displacement Potentials
The equation of motion for particle displacement u in a homogeneous isotropic elastic
solid can be written in vector form as (Morse & Feshbach, 1953; Aki & Richards, 2009)
a2 V(V.u) - 32 V
x
209
(V
x
u
-
i)
=
0,
(B.1)
where a, / are the P- and S-wave velocities in the medium. u can be expressed in
terms of scalar and vector potentials as u = V + V x '. Further the vector potential
can be expressed in terms of two scalar potentials as 0 = V x ( ez) + oe_, where
e_ is a constant unit vector (Frazer, 1979). Substituting the scalar potentials in B.1,
the equation of motion is satisfied when
a2
2
4-
0 2 V2
=
-
= 0
(B.2)
The particle displacement can be written in terms of the scalar potentials as
u = V# + V x [V x ( e,)] + V x Ve,)
(B.3)
When u represents the displacements due to a plane wave propagating in the x-z
plane and e_ represents the unit vector along z direction, the scalar potentials
#,
(,
V) correspond to P-, SV- and SH-waves, respectively.
B.2
Displacement-Stress Matrix
The displacement-stress matrix D that relates the coefficient vector to the displacementstress vector in the mth layer is given below. We drop the superscript m for the sake
of legibility.
210
UO(1(r)
U,02 (r)
U' ((r)
Uf2 (r)
Vno()
Vno ()
VnC()
Vn ()
Wnol()
WnC()
()
'Rno()
IZT,1
nf(r
(,r)
IZT,()
IZOl (r) IZO2
R
()
-T
(r)
()
()
V:()
V:2 (r)
n (r)
WV
(r)
(r)
RV
(r)
W:2 (r)
n
ZT(2 (r) IZ-T~l (,r)
(r) 7ZC((r)
-kZC(2(r)
(r)
-RT 02 (r)
-RZ 01(r)
-gZip2(r)
(B.4)
where,
Un0)(r) = akpHn'(kpr)
- -Qkzk8H '(ks )Un, ( ) = -'
U ('(r) =
ks
Hnf(kr)
U
=
V (')(r) =-
-
= i 3 k Hn(ksr) W
(r 0
8H
(kr)
(2)(r) =iakzHn2(kpr)
(r) = iO4s H (ksr)
W
211
nHn2(ksr)
k nH (ksr)
V4 ' 2 ) (r) = -k
ksH '(ksr)
H (k
= -a kpr
k- nHn (kpr)
ViN(Ir)=
z nHn(ksr)
(r) = iakzlH.(kpr) W
Wn()
(r) =ks
2 )(r)
Vn (r) = -a akrn-nH1(kpr
r )V'
Vn(r)
(r) = akpH, (kpr)
)
S(r)
U
(r) =
0
R,1,1,(,r)~02k
2
-
-po[(w
-
=_aW2 2
2B2k )Hi(kpr) +
kr(H 2
-pa[(W2 - 2p22 k )H (kpr) +
nzkpr
R,2)(r) =
Hn
kr(H (kpr)
(kpr)
~kr
Hi(kpr))]
-
-
kpr
H (kpr))]
2
= 2p13 kzks [Hn(ksr) +
-(r)
)Z (2)(r)
n
I
n
1
= 2pf 3 kzk 8 [H (ksr) + I
H$(ksr)
Hkr)
(r ) = -2p/3 k 2n[ k 2 Hn(ksr)
=2
k r
1ZO( 2 )(r n r
-
ZT
-
k r
2p/3ksn[k212 2 Hn2(ks r)
')(r-) = 2pa
2
-
2
H(kr)]
k>n[ 1 H(kpr) - k1rHn'(kpr)]
1
;
2
1T U)(r) = -2 p
zk
k2 2 H(k r) -
k
k2
-2 p03 kzk n k~
(ksr)
7Z0( 1)(r)
- kIrHn '(kpr)];
k~r
(kpr)
12
RTrn'(r)= pf 3k2[Hn(ksr)+
p, 3k![H
Hi(kr)]
-H'(kr)]
ksr
nk[r
Tks(r)=
2
H n'(kr)
7T G2(r) = 2paP2
nT j2(r) =
k
k2
k
+
IZ
n(k;r) -
IHn '(kr)] ;
ksr~f~s)
1H'(ksr)];
2n 22 H(kr)];
H '(kor) - k'r
H 2'(k~r)
k~rn
-
2n 22 H2 (ksr)1;
k r
= 2ipa3 2 kzkpHn'(kpr)
RZ1( 2) (r) = 2ipa32 kzkpHn2'(kpr)
RZO)(r) = -ipp 3 (k
212
8-k )kH Hi(kr);
7ZZ
(
2
~)
=i
Hn______
k
.(
= =ipi3 kk n H' (ksr)
-RZ(0)
ksr
1
)(r) =
7ZZ5(
n~t~
kar
3
ip3
ip kzk,kzk -H2(ks
H kr r)
In the above expressions p, a, 0, k8, k8, kp correspond to the properties of the layer
where D is evaluated. Hn, Hn are nth order Hankel functions of first and second kind,
respectively. H'(a), Hn'(a) are the derivatives of the Hankel functions evaluated at
a. Note that the multipliers inEn cos(nO)or sin (n9) are neglected since they cancel out
for each mode when applying boundary conditions at the interfaces. They must be
considered when evaluating the stress and strain.
Once the coefficients for the potentials are solved, the pressure in the borehole
fluid is given by
P(r, 0) = -u-,
= -- zz
= -eo00
Eni
= PfafW
An Jn(kfr) cos(n9),
n=O
and the stress components in each layer are given by
-rr
0
e00
00
Eni"cos(nO)
=
x
n=O
oUZZ
213
(B.5)
En
Pn
S (r)
7no
(r)
R P (r)
Tn* (r)o (r)
Zno ()
Zf()
7
(r)
7n
(r)
n$ (r
(1) (r)
Zf2 (,r)
Zl)
na
r
n4
()
(r) Z 2 (,r)
Fn
, (B.6)
Qn
Gn
4(1)=
n
V2
a2
-pa[((1
)L42
- 2
aE
2p2 i)H (kpr) - 2p2 k Hn (kpr)]
r
2.2 n)H (kpr)
)
T,12)=
V(1)
2 )2
-pa[((1 -2
+
where,
-
-Hn(ksr))
k~r
= -2p,3 3 kzks (H1'(ksr)
-
H (ksr))
= - 2pp
rka
(1) = -2p,3k,
rP(2) =
H '(ker
P 31
-2 P.
3
r
2/32 kp Hn2'(kpr) ]
r
-
2
(Hn (ksr)
nk, (Hn2'(ksr). - ks H (ksr))
r
Z$nO
-
Z
(1)
2
pa(w 2 - 2
2
-2p/3
Zn (2= -2
2
2
= -pa(w
-o
p03
-
k2)Hn(k
kp)Hn(kyr)
k H (ksr)
k s2Hn (k,,r)
Z M = 0
ZI( 2 ) = 0
214
r)
The strains in a layer can be obtained from stresses using
1
err
1
EzzJ
-V
-V
-V
-rr
1
-V
'ee
-V
1
Uzz
(B.7)
where E is the elastic modulus and v is the Poisson's ratio.
B.3
Displacement-stress vector for incident waves
The expressions for displacement-stress vectors for P-,SV-, and SH-plane waves are
given below
Incident P-wave
t5(r) = [u4 P)(r), V7)(r), W)4
)(r), R )(r), R1T 1 (r), RZ )(r)]T,
(B.8)
Incident SV-wave
T 8sv(r),
V)(r), RZSV)(r)]T,
(B.9)
(r) = USH)(r), VSH)(r), WSH) (r), 7(SH) (r), 1ZT 1SH) (r), JZZ(SH)(r)]T,
(B.10)
W(r) = [Ulsv)(r), Vsv)(r), WSV)(r), lZfSV)
Incident SH-wave
where,
215
U(SV)(r) = -Okz Jn'(kr);
Unp(r) = akpJn'(kpr);
VnV')(r) = -a"
WnY')(r)
=
Jn(kpr);
Vsv)(r)
iak Jn(kpr);
R(P)(r) = -pa[(w
ZV)(r)
=
=
=
1 Jn(k r)
n2P/3 k~konr kJn'(kkr)
Jn'(ksr)
3k Jn'(kjr);
0;
-
-
n
Jn(kqr)]
S~r
-
1
= 2 pa,2 2k n[ k12 Jn(kpr) - 1 J,'(kpr)]
TPs
kr
7ZTnsv)(r) = 2p/3 k~k~i[ 1~r Jn (k~r)
RT zSH)(r)
=
-/3lJ(kr);
- 2#3 2k )J(kpr)
+ 2# 2- r (Jn'(kpr) - -2 J(kpr))]
z
kpr
2p,33kzk,[Jn(ker) + 1
R'T$ 1)n(r)
=
WVSH)(r)
Wnisv) (r) = i~k8 J (ksr);
2
-
k8 Jn(ksr); VlS)(r)
-"
k
RJSH)(r)
U(SH)
-
1 J'(ksr)]
_ _p3 kskf[JT(ksr) +
Z
(r)
RZ sv)(r)
RZSH)
2
2n 2
Jn(k~r) 2
k 2r Jn (ksr)]
2ipac32 kzkpJn'(kpr)
_ ip 3(k2 _ip3 kz
216
k )Jn'(ksr)
ke n$Jn (ksr)
Appendix C
Reflection and Transmission
Coefficients for Strain
The plane wave reflection and transmission coefficients at a welded interface differ
for the physical quantity (e.g: displacement, pressure) that is considered. Here, we
derive the reflection and transmission coefficients for strain. Consider a plane Pwave traveling along the z direction, normally incident from medium 1 to medium
2 at z=O (as shown in the Figure C-1). Let the z-strain in the incident plane wave
be given by ci = expi(wt-kiz), where w is the angular frequency, k, = w/ai is the
wavenumber, a1 is the P-wave velocity in medium 1. Let the reflected wave be given
by Er = R expi(wt+kiz) and the transmitted wave be given by ct = T expi(t-k2z), where
k2 = w/a 2 is the wavenumber in medium 2 and a 2 is the P-wave velocity in medium
2. Given the strains along z-direction, the displacements in the z-direction ui,ur,ut
and the stresses in the z-direction ajUr,at are given by
-Ci
i
Ur --
Cr
k1k1
='
2
plaCji Ur
Ut =
-Et
k2
2
2
piaicr; Ut = P2e 2 Ct;
217
Note that all the other components of displacement and tractions at the interface are
zero for a normally incident P-wave. At the interface we require that the displacements and tractions are continuous. Thus, we have
C_ 2
i+ur=ut
1-R=T
a+o-,=t =
1+R=TP2(42
Piai
(C.1)
(C.2)
Solving the above two equations, we have
R = P2a2 - Pia
P2a2
T
2pia1
+pii
\P2a2
E.= ei(
(C.3)
+ pia(
wt-k
1 )
(a)
\lZC2/
(C.4)
I Er= Rei( t+klz)
x
ZR
medium1
medium 2
al
Pa2
Et= T e i(wt-k 2z)
Figure C-1: P-wave reflection at a welded interface.
218
References
Aguilera, R. (1995). Naturally fractured reservoirs (2Sub edition ed.). Tulsa, Okla:
Pennwell Books.
Aki, K., & Richards, P. (2009). Quantitative seismology (Second edition ed.). Sausalito, CA: University Science Books.
Baird, A. F., Kendall, J.-M., Verdon, J. P., Wuestefeld, A., Noble, T. E., Li, Y.,
... Fisher, Q. J. (2013). Monitoring increases in fracture connectivity during
hydraulic stimulations from temporal variations in shear wave splitting polarization. Geophysical Journal International, 195(2), 1120-1131.
Bandis, S. C., Lumsden, A. C., & Barton, N. R. (1983). Fundamentals of rock joint
deformation. InternationalJournalof Rock Mechanics and Mining Sciences and
Geomechanics Abstracts, 20(6), 249-268.
Bertholds, A., & Dandliker, R. (1988). Determination of the individual strain-optic
coefficients in single-mode optical fibres. Journal of Lightwave Technology, 6(1),
17-20.
Beydoun, W. B., Cheng, C. H., & Toks6z, M. N. (1985). Detection of open fractures
with vertical seismic profiling. Journal of Geophysical Research, 90(B6), 45574566.
Blum, T. E., Snieder, R., van Wijk, K., & Willis, M. E. (2011). Theory and laboratory experiments of elastic wave scattering by dry planar fractures. Journal of
Geophysical Research: Solid Earth, 116(B8), B08218.
Boness, N. L., & Zoback, M. D. (2006). Mapping stress and structurally controlled
crustal shear velocity anisotropy in california. Geology, 34 (10), 825-828.
Born, M., Wolf, E., Bhatia, A. B., Clemmow, P. C., Gabor, D., Stokes, A. R.,
...
Wilcock, W. L. (1999). Principles of optics: Electromagnetic theory of
propagation, interference and diffraction of light (7th edition ed.). Cambridge;
New York: Cambridge University Press.
Brown, S. R. (1987). Fluid flow through rock joints: The effect of surface roughness.
Journalof Geophysical Research, 92(B2), 1337-1347.
Brown, S. R., & Fang, X. (2012). Fluid flow property estimation from seismic
scattering data. 82nd Annual InternationalMeeting, SEG, Expanded Abstracts.
Brown, S. R., & Scholz, C. H. (1985). Broad bandwidth study of the topography
of natural rock surfaces. Journal of Geophysical Research, 90(B14), 12,57512,582.
Brown, S. R., & Scholz, C. H. (1986). Closure of rock joints. Journal of Geophysical
Research, 91 (B5), 4939-4948.
219
Budiansky, B., Drucker, D. C., Kino, G. S., & Rice, J. R. (1979). Pressure sensitivity
of a clad optical fiber. Applied Optics, 18(24), 4085-4088.
Burns, D. R., Willis, M. E., Toks6z, M. N., & Vetri, L. (2007). Fracture properties
from seismic scattering. The Leading Edge, 26(9), 1186-1196.
Charpentier, R., Law, B., & Prensky, S. (1989). Quantitative model for overpressured
gas resources of the pinedale anticline , wyoming. In B. E. Law & C. W. Spencer
(Eds.), Geology of tight gas reservoirs in the pinedale anticline area, wyoming,
and at the multiwell experiment site, colorado. United States Geological Survey.
Cheng, C. H., & Toks6z, M. N. (1982). Generation propagation and analysis of tube
waves in a borehole. Presented at SPWLA 23rd Annual Logging Symposium.
Cicerone, R. D., & Toks6z, M. N. (1995). Fracture characterization from vertical
seismic profiling data. Journal of Geophysical Research, 100(B3), PP. 41314148.
Crampin, S., & Lovell, J. H. (1991). A decade of shear-wave splitting in the earth's
crust: what does it mean? what use can we make of it? and what should we
do next? Geophysical Journal International, 107(3), 387-407.
Das, I., & Zoback, M. (2013). Long-period long-duration seismic events during
hydraulic stimulation of shale and tight-gas reservoirs part 2: Location and
mechanisms. Geophysics, 78(6), KS109-KS117.
de Pater, C., Groenenboom, J., van Dam, D., & Romijn, R. (2001). Active seismic monitoring of hydraulic fractures in laboratory experiments. International
Journal of Rock Mechanics and Mining Sciences, 38(6), 777-785.
EIA. (2014). The annual energy outlook (Tech. Rep.). U.S. Energy Information
Administration.
Fang, X., Fehler, M., Zhu, Z., Zheng, Y., & Burns, D. R. (2013). Reservoir fracture
characterization from seismic scattered waves. Geophysical Journal International, 196(1), 481-492.
Fang, X., Shang, X., & Fehler, M. (2013). Sensitivity of time-lapse seismic data to
fracture compliance in hydraulic fracturing. Geophysical JournalInternational,
195(3), 1843-1861.
Fang, Z., Chin, K., Qu, R., Cai, H., & Chang, K. (2012). Fundamentals of optical
fiber sensors (1st ed.). Hoboken, N.J: Wiley.
Farhadiroushan, M., Parker, T. R., & Shatalin, S. (2010). Method and apparatusfor
optical sensing. International Patent Application W02010136810 A2.
Fehler, M., & Phillips, W. S. (1991). Simultaneous inversion for q and source parameters of microearthquakes accompanying hydraulic fracturing in granitic rock.
Bulletin of the Seismological Society of America, 81(2), 553-575.
Fehler, M., Turpening, R., Blackway, C., & Mellen, M. (1982). Detection of a
hydrofrac with shear wave vertical seismic profiles. 52nd Annual International
Meeting, SEG, Expanded Abstracts.
Follett, J., Wyker, B., Hemink, G., Hornman, K., Lumens, P., & Franzen, A. (2014).
Evaluation of fiber-optic cables for use in distributed acoustic sensing: Commercially available cables and novel cable designs. 84th Annual International
Meeting, SEG, Expanded Abstracts, 5009-5013.
220
Frazer, L. N. (1979). A new derivation of the displacement potentials for motion
in a homogeneous isotropic elastic medium. Geophysical Journal of the Royal
Astronomical Society, 59(2), 389-397.
Gaiser, J., Loinger, E., & Vetri, L. (2002). Birefringence analysis at emilio field for
fracture characterization. First Break, 20(8), 505-514.
Gaiser, J., van Dok, R., Lu, C., Rielly, J., & Shevchek, Z. (2001). Green river basin 3d/3-c case study for fracture characterization: Analysis of ps-wave birefringence.
71st Annual InternationalMeeting, SEG, Expanded Abstracts.
Giallorenzi, T., Bucaro, J., Dandridge, A., Sigel, G., Cole, J., Rashleigh, S., & Priest,
R. (1982). Optical fiber sensor technology. IEEE Journal of Quantum Electronics, 18(4), 626-665.
Grandi, S. (2008). Multiscale determination of in situ stress and fracture properties
in reservoirs. Ph.D thesis, Massachusetts Institute of Technology.
Grattan, L. S., & Meggitt, B. T. (2000). Optical fiber sensor technology: Fundamentals. Boston: Springer.
Grechka, V., & Kachanov, M. (2006). Effective elasticity of fractured rocks: A
snapshot of the work in progress. Geophysics, 71(6), W45-W58.
Groenenboom, J., van Dam, D., & de Pater, C. (1999). Time lapse ultrasonic
measurements of laboratory hydraulic fracture growth: width profile and tip
behaviour. SPE Annual Technical Conference and Exhibition.
Hakami, E., & Larsson, E. (1996). Aperture measurements and flow experiments on
a single natural fracture. InternationalJournal of Rock Mechanics and Mining
Sciences and Geomechanics Abstracts, 33(4), 395-404.
Hall, S. A., & Kendall, J. M. (2003). Fracture characterization at valhall: Application
of p-wave amplitude variation with offset and azimuth (AVOA) analysis to a 3d
ocean-bottom data set. Geophysics, 68(4), 1150-1160.
Hardage, B. A. (1983). Vertical seismic profiling. Geophysical Press.
Hardin, E. (1986). Fracture characterizationfrom attenuation and generation of
tubewaves. M.S. thesis, Massachusetts Institute of Technology.
Hardin, E., Cheng, C. H., Paillet, F. L., & Mendelson, J. D. (1987). Fracture characterization by means of attenuation and generation of tube waves in fractured
crystalline rock at Mirror lake, New Hampshire. Journal of Geophysical Research, 92(B8), 7989-8006.
Hartog, A., & Kader, K. (2012). Distributedfiber optic sensor system with improved
linearity. US patent application 2012/0067118A1.
Hartog, A., Kotov, 0., & Liokumovich, L. (2013). The optics of distributed vibration
sensing. Second EAGE Workshop on Permanent Reservoir Monitoring.
Hornby, B. E., Johnson, D. L., Winkler, K. W., & Plumb, R. A. (1989). Fracture
evaluation using reflected stoneley wave arrivals. Geophysics, 54(10), 12741288.
Hornman, K. (2013). Permanent reservoir monitoring with onshore surface seismic.
Second EAGE Workshop on PermanentReservoir Monitoring.
Hornman, K., Kuvshinov, B., Zwartjes, P., & Franzen, A. (2013). Field trial of a
broadside-sensitive distributed acoustic sensing cable for surface seismic. 75th
EAGE Conference & Exhibition.
221
Hudson, J. A. (1981). Wave speeds and attenuation of elastic waves in material
containing cracks. Geophysical Journal International, 64 (1), 133-150.
Hudson, J. A. (1991). Overall properties of heterogeneous material. Geophysical
Journal International, 107(3), 505-511.
Hughes, R., & Jarzynski, J. (1980). Static pressure sensitivity amplification in interferometric fiber-optic hydrophones. Applied Optics, 19(1), 98-107.
Ionov, A. M. (2007). Stoneley wave generation by an incident p-wave propagating in
the surrounding formation across a horizontal fluid-filled fracture. Geophysical
Prospecting, 55(1), 71-82.
Johnson, D. L., Koplik, J., & Dashen, R. (1987). Theory of dynamic permeability
and tortuosity in fluid-saturated porous media. Journal of Fluid Mechanics,
176, 379-402.
Kachanov, M. (1992). Effective elastic properties of cracked solids: Critical review
of some basic concepts. Applied Mechanics Reviews, 45(8), 304-335.
Kaelin, B., & Johnson, L. R. (1999, January). Using seismic crosswell surveys to
determine the aperture of partially watersaturated fractures. Geophysics, 64 (1),
13-23.
Karam, S. G., Webster, P., Hornman, K., Lumens, P. G. E., Franzen, A., Kindy,
F., ... Busaidi, S. (2013). Microseismic applications using DAS. 4th EAGE
Passive Seismic Workshop.
Keighin, C. W. (1984). Petrographic and selected reservoir characteristics of some tertiary and cretaceous sandstones, pinedale anticline, sublette county, wyoming.
In B. Law (Ed.), Geological characteristicsof low-permeability upper cretaceous
and lower tertiary rocks in the pinedale anticline area, sublette county, wyoming.
United States Geological Survey.
Kiselevitch, V., Nikolaev, A., Troitskiy, P., & Shubik, B. (1991). Emission tomography: Main ideas, results, and prospects. 61st Annual InternationalMeeting,
SEG, Expanded Abstracts, 1602-1602.
Kostek, S., Johnson, D. L., & Randall, C. J. (1998). The interaction of tube waves
with borehole fractures, Part I: Numerical models. Geophysics, 63(3), 800-808.
Kostek, S., Johnson, D. L., Winkler, K. W., & Hornby, B. E. (1998). The interaction
of tube waves with borehole fractures, Part II: analytical models. Geophysics,
63(3), 809-815.
Kuster, G., & Toks6z, M. (1974). Velocity and attenuation of seismic waves in twophase media: part 1. theoretical formulations. Geophysics, 39(5), 587-606.
Kuuskraa, V., Stevens, S., & Moodhe, K. (2013). World shale gas and shale oil
resource assessment (Tech. Rep.). U.S. Energy Information Administration.
Law, B. E. (1984). Geological characteristics of low-permeability upper cretaceous
and lower tertiary rocks in the pinedale anticline area, sublette county, wyoming
(Tech. Rep. No. OFR - 84-753). United States Geological Survey.
Law, B. E., & Johnson, R. C. (1989). Structural and stratigraphic framework of the
pinedale anticline, wyoming, and the multiwell experiment site, colorado. In
B. Law & C. W. Spencer (Eds.), Geology of tight gas reservoirs in the pinedale
anticline area, wyoming, and at the multiwell experiment site, colorado. United
States Geological Survey.
222
Law, B. E., & Spencer, C. W. (1989). Geology of tight gas reservoirs in the pinedale
anticline area, wyoming, and at the multiwell experiment site, Colorado (Tech.
Rep. No. B - 1886). United States Geological Survey.
Lee, M. W., & Balch, A. H. (1982). Theoretical seismic wave radiation from a
fluid-filled borehole. Geophysics, 47(9), 1308-1314.
Liu, E. (2005). Effects of fracture aperture and roughness on hydraulic and mechanical properties of rocks: implication of seismic characterization of fractured
reservoirs. Journal of Geophysics and Engineering, 2(1), 38-47.
Liu, E., Crampin, S., & Hudson, J. A. (1997). Diffraction of seismic waves by cracks
with application to hydraulic fracturing. Geophysics, 62(1), 253-265.
Liu, E., Hudson, J. A., & Pointer, T. (2000). Equivalent medium representation of
fractured rock. Journal of Geophysical Research, 105(B2), 2981-3000.
Liu, E., Zelewski, G., Lu, C., Rielly, J., & Shevchek, Z. (2010). Seismic fracture prediction using azimuthal avo analysis in a middle east carbonate field: workflow
and mitigation of overburden effects. 80th Annual InternationalMeeting, SEG,
Expanded Abstracts.
Long, J., Aydin, A., Brown, S., Einstein, H., Hestir, K., Hseih, P., ...
Thomsen,
L. (1996). Rock fractures and fluid flow: Contemporary understanding and
applications. Washington, D.C.: National Academy Press.
Lubbe, R. (2005). A field and laboratory investigation of the fracture compliance of
fractured rock. Ph.D thesis, Oxford University.
Madsen, K., Diimmong, S., Kritski, A., Pedersen, A., Finfer, D., Gillies, A., & Travis,
P. (2013). Simultaneous multiwell VSP in the north sea using distributed
acoustic sensing. 75th EAGE Conference & Exhibition.
Majer, E., McEvilly, T., Eastwood, F., & Myer, L. (1988). Fracture detection using
p-wave and s-wave vertical seismic profiling at the geysers. Geophysics, 53(1),
76-84.
Mateeva, A., Lopez, J., Mestayer, J., Wills, P., Cox, B., Kiyashchenko, D., ... Grandi,
S. (2013). Distributed acoustic sensing for reservoir monitoring with VSP. The
Leading Edge, 32(10), 1278-1283.
Mateeva, A., Lopez, J., Potters, H., Mestayer, J., Cox, B., Kiyashchenko, D., ...
Detomo, R. (2014). Distributed acoustic sensing for reservoir monitoring with
vertical seismic profiling. Geophysical Prospecting, 62(4), 679-692.
Mateeva, A., Mestayer, J., Yang, Z., Lopez, J., Wills, P., Roy, J., & Bown, T. (2013).
Dual-well 3D VSP in deepwater made possible by DAS. 83rd Annual International Meeting, SEG, Expanded Abstracts, 5062-5066.
Mathieu, F. (1984). Application of full waveform acoustic logging data to the estimation of reservoirpermeability. M.S. thesis, Massachusetts Institute of Technol-
ogy.
Maxwell, S. C., Jones, M., Parker, R., Miong, S., Leaney, S., Dorval, D., ... Hammermaster, K. (2009). Fault activation during hydraulic fracturing. 79th Annual
InternationalMeeting, SEG, Expanded Abstracts.
Maxwell, S. C., Rutledge, J., Jones, R., & Fehler, M. (2010). Petroleum reservoir
characterization using downhole microseismic monitoring. Geophysics, 75(5),
75A129-75A137.
223
Maxwell, S. C., Underhill, W. B., Bennett, L., Woerpel, C., & Martinez, A. (2010).
Key criteria for a successful microseismic project. SPE Annual Technical Conference and Exhibition.
Mayerhofer, M., Lolon, E., Warpinski, N., Cipolla, C., Walser, D., & Rightmire, C.
(2010). What is stimulated reservoir volume? Society of Petroleum Engineers,
paper 119890(1).
Meadows, M. A., & Winterstein, D. F. (1994). Seismic detection of a hydraulic
fracture from shearwave VSP data at lost hills field, california. Geophysics,
59(1), 11-26.
Mestayer, J., Cox, B., Wills, P., Kiyashchenko, D., Lopez, J., Costello, M., ... Lewis,
A. (2011). Field trials of distributed acoustic sensing for geophysical monitoring.
81st Annual InternationalMeeting, SEG, Expanded Abstracts, 4253-4257.
Mestayer, J., Grandi Karam, S., Cox, B., Wills, P., Mateeva, A., Lopez, J., ... Lewis,
A. (2012). Distributed acoustic sensing for geophysical monitoring. 74th EAGE
Conference & Exhibition.
Miller, D., Parker, T., Kashikar, S., Todorov, M., & Bostick, T. (2012). Vertical
seismic profiling using a fibre-optic cable as a distributed acoustic sensor. 74th
EAGE Conference & Exhibition.
Miller, T. S., Crockett, F. J., & Hollis, S. H. (1992). Wyoming oil and gas fields
symposium, greater green river basin and overthrust belt. Wyoming Geological
Association.
Morse, P. M., & Feshbach, H. (1953). Methods of theoretical physics. Boston, Mass:
McGraw-Hill Science/Engineering/Math.
Nelson, R. (2001). Geologic analysis of naturally fractured reservoirs, second edition
(2edition ed.). Boston: Gulf Professional Publishing.
O'Connell, R. J., & Budiansky, B. (1974). Seismic velocities in dry and saturated
cracked solids. Journal of Geophysical Research, 79(35), 5412-5426.
Papp, B., Donno, D., Martin, J., & Hartog, A. (2014). Fundamentals of vibration
sensing with distributed fibre optic sensors through downscaled experiments..
Parker, T., Shatalin, S. V., & Farhadiroushan, M. (2014). Distributed acoustic sensing
a new tool for seismic applications. First Break, 32.
Peacock, S., & Hudson, J. A. (1990). Seismic properties of rocks with distributions
of small cracks. Geophysical Journal International, 102(2), 471-484.
Peng, C., Cheng, C. H., & Toksoz, M. N. (1993). Borehole effects on downhole seismic
measurements. Geophysical Prospecting, 41(7), 883-912.
Peng, C., Cheng, C. H., & Toksz, M. N. (1994). Cased borehole effects on downhole
seismic measurementsl. Geophysical Prospecting, 42(7), 777-811.
Posey, R., Johnson, G. A., & Vohra, S. T. (2000). Strain sensing based on coherent
rayleigh scattering in an optical fibre. Electronics Letters, 36(20), 1688-1689.
Pyrak-Nolte, L. (1996). The seismic response of fractures and interrelations among
fracture properties. InternationalJournal of Rock Mechanics and Mining Sciences & Geomechanics Abstracts, 33(8), 787-802.
Pyrak-Nolte, L., & Cook, N. G. W. (1987). Elastic interface waves along a fracture.
Geophysical Research Letters, 14 (11), 1107-1110.
224
Pyrak-Nolte, L., & Morris, J. (2000). Single fractures under normal stress: The
relation between fracture specific stiffness and fluid flow. InternationalJournal
of Rock Mechanics and Mining Sciences and Geomechanics Abstracts, 37(1-2),
245-262.
Pyrak-Nolte, L., Myer, L. R., & Cook, N. G. W. (1990). Transmission of seismic
waves across single natural fractures. Journal of Geophysical Research, 95 (B6),
8617-8638.
Pyrak-Nolte, L., Xu, J. J., & Haley, G. M. (1992). Elastic interface waves along a
fracture: Theory and experiment. The 33rd U.S. symposium on Rock Mechan-
ics, ARMA.
Rae, P. J., & Brown, E. N. (2005). The properties of polytetrafluoroethylene (PTFE)
in tension. Polymer, 46(19), 8128-8140.
Rae, P. J., & Dattelbaum, D. M. (2004). The properties of polytetrafluoroethylene
(PTFE) in compression. Polymer, 45(22), 7615-7625.
Renshaw, C. E. (1995). On the relationship between mechanical and hydraulic apertures in rough-walled fractures. Journal of Geophysical Research, 100(B12),
636.
Riiger, A.
(1998).
Variation of p-wave reflectivity with offset and azimuth in
anisotropic media. Geophysics, 63(3), 935-947.
Rutledge, J., & Phillips, W. (2003). Hydraulic stimulation of natural fractures as
revealed by induced microearthquakes, carthage cotton valley gas field, east
texas. Geophysics, 68(2), 441-452.
Schoenberg, M. (1980). Elastic wave behavior across linear slip interfaces.
Journal of the Acoustical Society of America, 68(5), 1516-1521.
The
Schoenberg, M. (1986). Fluid and solid motion in the neighborhood of a fluid-filled
borehole due to the passage of a low-frequency elastic plane wave. Geophysics,
51(6), 1191-1205.
Schoenberg, M., & Douma, J. (1988). Elastic wave propagation in media with parallel
fractures and aligned cracks. Geophysical Prospecting, 36(6), 571-590.
Schoenberg, M., & Sayers, C. M. (1995). Seismic anisotropy of fractured rock.
Geophysics, 60(1), 204-211.
Shen, F., Sierra, J., Burns, D. R., & Toks6z, M. N. (2002). Azimuthal offset-dependent
attributes applied to fracture detection in a carbonate reservoir. Geophysics,
67(2), 355-364.
Spencer, C. W. (1984). Overpressured tight gas reservoirs in the pinedale anticline
area, sublette county, wyoming. In B. Law (Ed.), Geological characteristics
of low-permeability upper cretaceous and lower tertiary rocks in the pinedale
anticline area, sublette county, wyoming. United States Geological Survey.
Stewart, R. R., Turpening, R. M., & Toksoz, M. N. (1981). Study of a subsurface
fracture zone by vertical seismic profiling. Geophysical Research Letters, 8(11),
1132-1135.
Tang, X. M. (1990). Acoustic logging in fractured and porous formations. Ph.D thesis,
Massachusetts Institute of Technology.
Tang, X. M., & Cheng, C. H. (1993). Borehole stoneley wave propagation across
permeable structures. Geophysical Prospecting, 41(2), 165-187.
225
Thompson, M. E., & Brown, S. R. (1991). The effect of anisotropic surface roughness
on flow and transport in fractures. Journal of Geophysical Research: Solid
Earth, 96(B13), 21923-21932.
Tonn, R. (1991). The determination of the seismic quality factor q from vsp data: A
comparison of different computational methodsl. Geophysical Prospecting, 39,
1-27.
Tsang, Y. W. (1984). The effect of tortuosity on fluid flow through a single fracture.
Water Resources Research, 20(9), PP. 1209-1215.
Tsang, Y. W., & Witherspoon, P. A. (1983). The dependence of fracture mechanical
and fluid flow properties on fracture roughness and sample size. Journal of
Geophysical Research: Solid Earth, 88(B3), 2359-2366.
Turpening, R. (1984). Differential VSP: fracture volume analysis and the hydrofrac.
In Balch, a. h., and lee, m. w., eds., vertical seismic profiling: Technique, applications and case histories (pp. 307-383). International Human Resources
Development Corp.
Turpening, R., & Blackway, C. (1984). Differential VSP: the hydrofrac. In Balch, a.
&
&
h., and lee, m. w., eds., vertical seismic profiling: Technique, applications and
case histories. International Human Resources Development Corp.
Ugueto, G. A., Ehiwario, M., Grae, A., Molenaar, M., Mccoy, K., Huckabee, P.,
Barree, B. (2014). Application of integrated advanced diagnostics and modeling to improve hydraulic fracture stimulation analysis and optimization. SPE
Hydraulic Fracturing Technology Conference, 168603-MS.
Walsh, J. (1981). Effect of pore pressure and confining pressure on fracture permeability. International Journal of Rock Mechanics and Mining Sciences
Geomechanics Abstracts, 18(5), 429-435.
Warpinski, N. R. (2009). Microseismic monitoring: inside and out. Journal of
Petroleum Technology, 61, 80-85.
Warpinski, N. R., Du, J., & Zimmer, U. (2012). Measurements of hydraulic-fractureinduced seismicity in gas shales. SPE Annual Technical Conference and Exhibition.
Warpinski, N. R., Wolhart, S., & Wright, C.
(2004). Analysis and prediction of
microseismicity induced by hydraulic fracturing. SPE Journal, 9(01), 24-33.
Webster, P., Wall, J., Perkins, C., & Molenaar, M. (2013). Micro-seismic detection
using distributed acoustic sensing. 83rd Annual International Meeting, SEG,
Expanded Abstracts, 2459-2463.
White, J. (1983). Undergroundsound: Application of seismic waves. Elsevier science
publishing company.
Willis, M. E., Burns, D. R., Rao, R., Minsley, B., Toks6z, M. N., & Vetri, L. (2006).
Spatial orientation and distribution of reservoir fractures from scattered seismic
energy. Geophysics, 71(5), 043-051.
Wills, P. B., DeMartini, D. C., Vinegar, H. J., Shlyapobersky, J., Deeg, W. F.,
Woerpel, J. C., ... Adair, R. G. (1992). Active and passive imaging of hydraulic
fractures. The Leading Edge, 11 (7), 15-22.
Winterstein, D. F., & Meadows, M. A. (1991). Shear wave polarizations and subsurface stress directions at lost hills field. Geophysics, 56(9), 1331-1348.
226
Witherspoon, P. A., Wang, J. S. Y., Iwai, K., & Gale, J. E. (1980). Validity of cubic
law for fluid flow in a deformable rock fracture.
Water Resources Research,
16(6), 1016-1024.
Worthington, M. H. (2007). The compliance of macrofractures. The Leading Edge,
26(9), 1118-1122.
Worthington, M. H., & Lubbe, R. (2007). The scaling of fracture compliance. Geological Society, London, Special Publications, 270(1), 73 -82.
Yamakawa, N. (1962). Scattering and attenuation of elastic waves. Geophysical
Magazine, 31, 63-103.
Zheng, Y., Fang, X., Fehler, M., & Burns, D. (2013). Seismic characterization of
fractured reservoirs by focusing gaussian beams. Geophysics, 78(4), A23-A28.
Zimmerman, R., & Bodvarsson, G. (1996). Hydraulic conductivity of rock fractures.
Transport in Porous Media, 23(1).
Zoback, M. D. (2010). Reservoir geomechanics. Cambridge University Press.
227