A tom ic F orce M icroscope:M odeling, Sim ulations,
advertisement

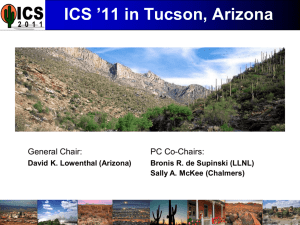
A tom ic F orce M icroscope:M odeling, Sim ulations, andE xperim ents O sam ah M .E lR ifai, and K am alY oucef-Toum i A bstract| T he quality of atom ic force m icroscope (A F M ) data strongly dependson scan and controllerparam eters. D ata artifacts can result from poordynam ic response ofthe instrum ent. In order to achieve reliable data, dynam ic interactionsbetween A F M com ponentsneed to be wellunderstood and controlled. In thispaperwe present a sum m ary of ourwork in this direction. It includesm odelsforthe probe-sam ple interaction, scannerlateraland longitudinal dynam ics, scannercreep, and cantileverdynam ics.T he m odelswere used to study the e®ectofscan param eterson the system dynam ics. Sim ulation resultsforboth frequency response and im aging werepresented.E xperim entalresultswere given supporting the sim ulations and dem onstrating the com petence ofthem odels.T heresultswithin will be used to develop algorithm s that allow autom ated choice of key system param eters, guaranteeing reliable and artifact-free data forany given operating condition (sam ple, cantilever, environm ent). C onsequently, expanding theA F M capabilitiesandperm itting itsuse in a widerrange ofapplications. K eywords| A F M , m odel, experim ents, sim ulation, control X Detector Y Vz Laser Piezo Amplifier θ py Disturbance Signal Set-point Z + u Sample Controller yPSD F ig.1. Schem atic diagram ofA F M m ain com ponents. sultsare presented and discussed in section V .Sum m ary and concluding rem arksare given in section V I. I.Introduction T he invention ofscanning probe m icroscopy (SPM ), and A F M in particular, hasgreatly contributed to advancing research in nano-science andtechnology to itscurrentstate ofthe art.T he successofA F M asa toolin nano-sciences, liesin itsability to provide controlled nano-levelforce or displacem ent.E xam plesinclude nano-scale studiesofplastic deform ation, m icrostructures, and friction [1]. O ther applicationsrequire surface topography inform ation of a sam ple, e.g.m icro-fabrication, and nano-defects. Poor dynam ic interactions between A F M com ponents can resultin corrupting A F M data, [2], andproducing data artifacts.In orderto achieve the bestpossible perform ance one needsto understand these dynam ic interactions. In thisscope, there hasbeen som e work in the literature on developing m odelsthat describe the dynam icsofan A F M cantileverduring interm ittent-m ode operation, [3].T hese m odelsfocuson probe-sam ple interaction at a single location on the sam ple surface. D ue to the low scanning speedsofthism ode, these m odelsdo not account forthe e®ect ofscanning speed norscannerdynam ics.T herefore, these m odelsfailto capture the overalldynam icsand are not suitable foranalyzing contact-m ode operation, w here scan speed, scannerdynam ics, friction, and controlsystem allneed to be considered. T hispaperpresentsa sum m ary ofresearch e®orttoward addressing these challenges in A F M technology. In section II, som e background on A F M isgiven. Section III, elaborateson the m otivation for this work. M odels for probe-sam ple interactions, scanner lateral and longitudinaldynam ics, scannercreep, and cantileverdynam icsare presented in section IV .Sourcesofnoise and disturbances are also discussed. B oth experim entaland sim ulation re- II.A tomic Force M icroscope A n A F M , F ig.1, hasthree m ain com ponents, nam ely, a scanner, a cantileverw ith a sharp probe , and a cantilever de°ection sensorcom prised ofa lasersource anda position sensitive diode (PSD ).T he scanner, typically a piezoelectric tube, providesthree-dim ensionalm otion betw een the probe and a sam ple. Inform ation on sam ple topography orlocalpropertiesisobtained based on probe-sam ple interactions. O ne of the m ain operating m odesof A F M is contact m ode. In thism ode, the probe pressesagainst a sam ple, exerting a verticalforce proportional to the cantileverde°ection. T he probe isthen dragged against the sam ple along each scan line in a rasterfashion.T he slope atthecantileverfree-endism easuredandfedback.D uring scanning, a controlsystem isused to m aintain a constant slope, by adjusting the verticaldisplacem ent of the scanner.C hangesin the piezo de°ection are therefore, related to changes in the sam ple topography. T his m ode isthe scope ofthispaper. III.M otivation A com m ercial A F M was used to scan a Silicon calibration steps. T he A F M w as run under PI control. A Silicon N itride cantilever w as used w ith a resonant frequency of 13 kH z and sti®ness of 0: 2 N =m . Scan resultsdem onstrate the high sensitivity of collected im ages to scan and controllerparam eters(K p and K i).C om paring F ig. 2 (a) (72 ¹m =s;K p = K i = 2) to F ig. 2 (b) (96 ¹m =s;K p = K i = 20), som e ofthe e®ectsofscanning speedandcontrollergainson theim agecan beseen.H igher gainsresult in oscillationsasthe cantileverfallsalong the right edge ofthe step, w ith peaksprobably indicating m o- R 2a 2c F ig.4. Schem atic ofprobe-sam ple contact. F ig.2. A F M im ages:(a)72¹m =s;K p = K i = 2, (b)96¹m =s;K p = K i = 20. tion param eter¸, wasde¯ned as, 9R ¸ = ¾o( 2¼wE F ig.3. A F M im ages:180¹m =s, (a) nom inal contact force, (b) sm allercontactforce. 1 ¤2 )3 (1) w here, ¾o isthe theoreticalstrength ofthe adhesion junction, R isthe reducedradiusofthe spheres, w isthe D upr¶ e w ork ofadhesion, and E ¤ isthe com bined elastic m odulus ofthe spheres.T histransition param etercan be view edas the ratio ofelastic deform ation to the e®ective range over w hich surface forcesact.From (1), itfollow sthatlargevaluesfor¸ w ould correspond to com pliant (sm allE ¤), large spheres(R ), and sm alladhesion (w)contacts, w here sm all valuesare forsti® sm allspheresw ith high adhesion.T he m odelcan be used to predict contact force F con, contact deform ation ±, and contact radiusa. T hem odeliscom posedofthreenonlinearalgebraicequation that can be expressed in non-dim ensionalform as, m entary lossofcontactbetween the probe and the sam ple. W hile the sharp peak on the left edge ofthe step, F ig.2 (b), can be attributed to a high scan speed com pared to closedloopbandwidth.T he highergainsim prove tracking, asthe sharp left edge of the step isresolved m ore accurately. F igures3 (a) and (b) w ere generated w ith a scan speed of 180¹m =s using the sam e controllergains. T he contactforce set-pointforF ig.3 (a)isset to the m anufacturer'srecom m endedvalue, w hile F ig.3(b)a sm allerforce wasused.C hoosing a sm allcontactforce set-pointreduces 4¸a p 2 ± = a2¡ m ¡1 contact deform ation and friction, however, it reducessta3 p bility ofthe contact. A sseen from F ig. 3 (b), the im age F con = a3 ¡ ¸a2[ m 2 ¡ 1+ m 2sec¡1(m )] (2) generated w ith a sm allcontact force haserroneousheight 2 p inform ation, due to lossofcontact between the probe and ¸a 1 = [(m 2¡ 2)sec¡1(m )+ m 2¡ 1]+ the sam ple. 2 Ithasbeen show n thatscan andcontrolparam etersdra4¸2a p 2 [ m ¡ 1sec¡1(m )¡ m + 1] m atically im pact A F M dynam ics. A sa result, im age ar3 tifact m ay result because of poordynam ics. In orderto c elim inate these typesof artifacts, we need to understand w here, m = a asin F ig.4, cisthe radiusoverw hich surthe dynam ic interactionsbetw een di®erent com ponentsof faceforcearepresent.T heuseofsuch continuum m odelsto describe nano-contactshasbeen supportedby m any experthe A F M .T hisisthe objective ofthiswork. im ents.T he levelat w hich continuum m odelsbreak-dow n isnot allclear[7]. IV .System M odel W e have reported m odels describing the dynam ics of A F M in [4], [5].Itincludesprobe-sam pleinteraction forces, m odelsforthe piezoelectric scannerlongitudinaland lateraldynam icsand coupling betw een them , and cantilever °exuraldynam ics.Sourcesofnoise and disturbancesw ere also discussed. In thissection, the m odelsw illbe brie°y presented and discussed. A. 2 In-contact M odel:L ateralForces A sthe probe isdraggedagainstthe sam ple w hile in contact, a frictionalshearforce develops. A t nano-levelcontacts, experim entshave revealedthe dependence offriction force on contact area, [1].Forourpurposes, w e are interestedin sim ulating the e®ectofsliding friction force on the cantileverdynam icsduring scanning.A sa ¯rst orderapproxim ation, wew illassum ethattheinstantaneousfriction A .Probe-sam ple Interaction force isdirectly proportionalto the instantaneouscontact area (»a2).T hism odeldoesnot considerany explicitdeA .1 In-contact M odel:V erticalF orces pendence offriction on scanning speed.A lthough contact T hiscontact m echanicsm odel [6], issuitable forA F M m odelsw ere originally developed forstatic loading, it has operation in airorotherm edia w here adhesion/capillary been show n in [1], that it holdsundersliding conditions forcesare dom inant. It describesthe adhesion/capillary w ith not very high sliding speeds. W hen the probe and contact oftwo elastic spheres. A non-dim ensionaltransi- sam ple are out ofcontact the friction force isset to zero. 2 Vy+ Y Ri Vx- δy y Oo Oi C 1 θδ x δx θ X Ro Vx+ negligible e®ectsof rotary inertia and sheardeform ation. B elow , eqn.(3), givesthe transferfunction betw een the inputvoltagesandthe lateraldisplacem entuj;(j= 1;2), for i¤ num berofm odes.E quations(4), and(5)givetheoutput equationsfordisplacem entsin the X and Y -directions, xp and yp, respectively.T he scanner' sfree end rotations(i. e. slopes)about X and Y -axes, µpx and µpy, respectively, are given in eqn. ' s(6)and (7). Vz Vy- F ig.5. C rosssection ofan eccentric piezoelectric tube. ¤ i X °ix+ V x+ + °ix¡ V x¡ + °iy+ V y+ + °iy¡ V y¡ + °izV z uj = 2 s2+ 2³iuj!iujs+ !i uj i= 1 (3) xp = yp = A .3 O ut-of-contact M odel:V erticalF orces W hen the probe and sam ple are not in contact, van der W aalsforcesbetween two spheresare assum ed to be the dom inant interaction. µpx = µpy = cos(µ±)u1 ¡ sin(µ±)u2 sin(µ±)u1 + cos(µ±)u2 @ u2 @ u1 + cos(µ±) sin(µ±) @z @z @ u1 @ u2 cos(µ±) ¡ sin(µ±) @z @z (4) (5) (6) (7) A .4 PointofC ontact C .ScannerL ongitudinalD ynam ics A t the lim it oflossof contact, the contact radiusa ! T he detailsofthe m odelare given in [11].T he m ain as0. Substituting this into eqn. (2), gives the force and sum ptionsare sim ilarto those ofsection IV -B .T he transseparation atthatlim it.T hisisused to im pose continuity fer function between input voltages and displacem ent of on the force between m odelsofsectionsIV -A . 1andIV -A . 3 the tube' sfree-end zp, forj¤ num berofm odesisgiven as, . ¤ j X °jx+ V x+ + °jx¡ V x¡ + °jy+ V y+ + °jy¡ V y¡ + °jzV z zp = 2 s2+ 2³jzp !jzp s+ !j zp T here are two m ain designsforA F M .In one design, the j= 1 (8) cantileveris¯xed and a sam ple isplaced on the scanner w hich m ovesitrelative to the cantilever.T hisdesign, generally, lim itsthe m axim um size and weight ofthe sam ple. D .ScannerC reep In the second design, F ig.1, the cantileverisattached to T heresponseofa piezoelectricactuatorto a rapidchange the scannerthat m ovesit relative to a stationary sam ple. in input voltage, F ig.6, consistsoftwo m ain parts.T he In thispaperthe m odelpresented isforthe second, m ore initial part of the response occursovera tim e scale dictated by the m echanical resonance of the actuator. T his populardesign. s T he scannerisa thin-walled piezoelectric tube that has isfollow ed by a slow creeping response occuring over100 fourelectrodesofequalsegm entson itsoutersurface, and ofsecondsand am ounting to asm uch as20% ofthe total eithera singleorfourelectrodeon itsinnersurface.A pply- response. T he rate and am ount ofcreep strongly depend ing a voltage V z, to itsinnerelectrode(s)resultsin exten- on the piezoelectric m aterial.E xperim entalfrequency resion m otion, (in the Z-axis).M otion in the X orY axisis sponse ofpiezoelectric actuatorsdisplaysvery little variatypically generated by subjecting tw o opposite electrodes tion in phase at low frequency between input voltage and to two voltage signals, (V x+ ;V x¡ )and (V y+ ;V y¡ ), w ith the displacem ent.O n the otherhand, a slight decrease in gain isobservedw ith increasing frequency.Itispossible to sim sam e m agnitude but are out ofphase. In [8], [9], a m odelforan idealuncoupled tube scanner ulate creep behaviorusing a suitable L T I m odel.T he relwaspresented.D ue to inevitable m achining tolerance, ec- ative degree isnum berofpolesm inusthe num berofzeros centricity isalwayspresent in the tube.T ypically, a m ax- of the transfer function. T he transfer function between im um of 50¹m fora 12: 7m m diam etertube, [10]. T his the input voltage and actuatordisplacem ent should have seem ingly sm all eccentricity is in fact signi¯cant as the a relative degree zero at frequenciesm uch low erthan the sresonance frequency.T hism odelassum esthat cantilever-de°ection sensorhasA ngstrom rm sresolution. actuator' T he m odelisbasedon two eccentric cylinders, F ig.5, w ith the ratio between the am ount ofcreep and the fast scaneccentricity ±x and±y from thegeom etriccenteroftheouter nerdisplacem ent isindependent ofinput am plitude.T he cylinder, O o.T he tube is¯xed at one end and free at the assum ption w illbe experim entally tested. other. A cantileverholderofm assm sh isattached to its free end.T he m odelisbased on elem entary bending the- E .C antileverF lexuralD ynam ics ory forthin-walled m em bers. T he m ain assum ptionsare T hisdynam icm odelforthecantileverm otion neglectsefsm alldeform ationsand angles, linearelastic m aterial, and fectsofsheardeform ation and rotary inertia, and isbased B .ScannerL ateralD ynam ics * Cantilever Displacement, [nm ] 450 Force 400 Penetration Region Out-of-Contact Region 350 300 250 200 δ 150 Probe-sample Separation -kc N/m 100 50 -kc N/m Pull-off point Pull-in point 0 0 10 20 30 40 50 60 Time, [s] F ig.6. E xperim entalcreep response. F ig.7. Sim ulation:Q uasi-static norm alized force-separation curve. 15 10 * Force, [nN ] on elem entary bending theory. T he cantileverslope (angle), zc0 , ism easuredrelative to itsbase m otion, zp(t).T he boundary conditionsare taken aszero de°ection and slope relative to the base atthe ¯xed end, and zero m om ent and shearforce at the free-end. F orsim plicity, the cantilever isassum ed to be aligned w ith the X -axis. T he transfer function governing the cantilever' sresponse isgiven by, ¤ zc0 (s) = m X a2zm s2+ a1zm s zp(s) 2 s + 2³cm !cm s+ !c2m m=1 a2µm s2 + a1µm s µpy(s) 2 2 s + 2³cm !cm s+ !c m afm + 2 f(zc;zp;µpy;zs) (9) 2 s + 2³cm !cm s+ !c m 5 0 Pull-in Point + w here, f(zc;zp;µpy;zs)isthe probe-sam ple force, and zs isthe sam ple height. Pull-off Point -5 0 50 100 150 200 250 300 350 400 450 500 Probe-sample Separation, [nm*] F ig.8. E xperim entalforce-displacem entcurve. F .SensorO utput Feedback m easurem ent noise arising from the optical T he optical-leversensorm easuresthe absolute angle of sensorcan be due to shot noise, a fundam ental noise for the cantilever' sfree-end.T herefore, the PSD outputyPS D , these sensors, in addition to noise from sensorelectronics. Shot noise can also be m odeled asw hite noise. isgiven by, yPS D = µpy ¡ zc0 (10) V .R esults G .D isturbances A .Q uasi-static Force-separation C urve T herm alnoise orB row nian m otion contributesto a fundam entalsource ofnoise in A F M .A t therm alequilibrium , the m ean value of the cantileverpotential energy hasto 38£ 10¡23 J =K isB oltzm ann' s equal 1 2kBT , w here kB = 1: constant, and T is the absolute tem perature in K elvin. T he cantilever' sfree-end q w illoscillate w ith a R M S value, rm s 3 rm s 3 0 BT zc = 2L czc = 2L c kk , w here kc isthe cantilever c sti®ness, and L c isthe cantileverlength. T hisexpression isvalid fora free standing cantilever. If the cantileveris in contact w ith a sam ple, the expression hasto be m odi¯ed by including the sam ple e®ective sti®nessin kc. A nothersource ofdisturbance islaserback-action.It isdue to incidence ofphoton °ux from the opticalsensoron the cantilever. B oth therm al and back-action noises w ill be e®ectively m odeled aszero-m ean w hite noise force disturbanceswith a com bined constant intensity µ±(t¡ ¿). T he m odelsofsectionsIV -A . 1, IV -A . 3w ere usedto generate the com posite force-separation curve ofF ig.7.Param etersused to generate the curve are given in [4].It is w orth noting that eqn.(2)can predict an instability that hasbeen observed in quasi-static experim ents.T hisinstability occursw hen an approaching/receding probe jum ps in/out (pull-in/pull-out points), of contact w ith the sam ple surface corresponding to a sudden jum p in the contact area.T heactualpointofinstability on theforce-separation curve w illdepend on the sti®nessof the cantileverkc, as show n in F ig. 7. A n experim entalforce-separation curve isshow n in F ig.8, w here ¤ denotesuse ofestim ated calibration factors.It show sthe sam e characteristic produced by the m odelin F ig.7, except that hysteresisisobserved in the penetration region asthe approach and retractlines are not the sam e. 10 -5 Magnitude k /k = 1 10 10 s -6 s 10 z´c k /k = 4 2 Phase, [degree] 200 ks k /k = 7 c s c 3 10 Frequency, [Hz] 100 0 -100 zs -200 2 10 F ig.9. Schem atic ofprobe-sam ple contact. c -8 10 kc s c -7 s zp k /k = 2 k /k = 1.5 c 3 10 Frequency, [Hz] F ig.10. Sim ulation:In-contactfrequency responsefordi®erentratios ks . ofsam ple to cantileversti®ness k c 4 3 2500 2000 2 1500 1000 1 500 Imaginary Axis T he probe-sam ple interaction force f(zc;zp;µpy;zs) is a nonlinearfunction of probe-sam ple separation, and dependson geom etry, environm ent, and probe and sam ple m aterialproperties. T o obtain a linearm odelto be used foranalysis, the force w asexpanded in a T aylorseriesand linearterm swere retained, giving, Imaginary Axis B .In-contactD ynam ics:Sim ulations x 10 0 -1 f(zc;zp;µpy;zs) = gczc + gzzp + gµpyµpy +kszs + H : O : T 0 -500 -1000 -1500 (11) ks can be considered asa lineare®ective probe-sam ple contact sti®ness.T he probe-sam ple contact can be represented schem atically asin F ig.9, w here again zc, ism easured relative to zp. T he contact and cantileversti®ness kc, are represented astw o springsin series. T he contact sti®nessdoesnot change the orderof the m odel, but has a great im pact on the system ' szeros.Substituting eqn. ' s. (3), (7), (8), and(11)into eqn.(9)and the resulting equation into eqn. (10) givesthe overallm odel. T he transfer function ofinterestisbetw een V z andyPS D .T hisdescribes the A F M Z-dynam ics, w hich w e w illfocuson in thiswork. T he m odel used in this study included four bending m odesand two extension m odesforthe scanner, and one bending m ode forthe cantilever. T he param eter values used are given in [11]. T he ratio of sam ple to cantilever s sti®nessk ovedto bean im portantparam eter.C hanges kc, pr in thisratio have two m ain e®ectson the m odel, nam ely, change in thetransferfunction D C gain andchangesin the frequency ofthe zerosassociatedw ith the scannerbending m odes, 380H z and2kH z.F igure 10, show sthe sim ulated frequency response ofthe m odelfordi®erentratiosofsti®s nesses. F orlarge ratios(e. g. k kc = 7), the zeroshave a higherfrequency than the m ode. F orsm allerratios(e. g. s 1· k · 2 ) , t he f r equency decr eas est o be bel ow t hat of kc the m ode.T hischange in pole-zero pattern isreferred to s aspole-zero °ipping.M oreover, forsom e value (k kc ¼ 4), there ispole-zero cancelation and the bending m odesare unobservable. F igure 11, presentsa pole-zero m ap ofthe s ¯rst two m odesfordi®erent valuesof k ult, as kc . A sa res the zerosm ove away from the m ode, the resonance peak appearsm ore prom inent in the response. F urther, w hen ks eachesa kc iseithertoo large ortoo sm all, the D C gain r -2 -3 -1400 -1200 -1000 -800 -600 -400 -200 Real Axis -2000 -2500 0 -200 -195 -190 Real Axis -185 -180 s F ig.11. Pole-zero m ap asa function of k :(left) zoom on 2kH z kc m ode, (right)zoom on 380H z m ode. lim it controlled by kc and ks, respectively.Forinterm ediate values, the D C gain w illdependon both sti®nessesand changesin ks due to di®erentset-pintsorinputam plitudes w illchange the D C gain, and zeroslocation. C .In-contactD ynam ics:E xperim ents To investigate in-contact A F M dynam ics and validate the m odels, tw o sam ples w ere chosen for experim ents, nam ely, a G lassanda Polydim ethylsiloxane (PD M S), sam ple having Y oung' sm oduli ofelasticity of60and2: 5M Pa, respectively. T w o di®erent cantilevers were used. C antileverA hasan estim ated sti®nessof 0: 03N =m and resonance frequency of 13kH z. C antilever B has an estim ated sti®ness of 0: 14N =m and resonance frequency of 14kH z. D i®erent set-points and input am plitudeswere usedto study the e®ectofthese param eterson the dynam ics. F igure 12, show s the force-displacem ent curve forthe G lass sam ple. T he points labeled on the plot are the force set-points used in the frequency response experim ents.N ote thatthelocalsensitivity aroundtheset-points (cantileverde°ection perscannerinput voltage)issm aller forthe largerforce set-point. T hissuggestsreduced contact sti®nesspotentially due to plastic deform ation in the contact.T he e®ectsofforce set-pointon the dynam icsare seen in F ig. 13. Forthe largerset-point, 17nN , the D C 20 0 Force Set-points 15 10 Vz = 300 mV Vz = 500 mV DC Gain = 0.23 DC Gain = 0.18 -1 10 2 3 10 10 Frequency, [Hz] 5 Phase, [degree] Force, [nN*] Magnitude 10 0 -100 0 -200 -5 -0.05 0.25 0.55 0.85 1.15 2 1.45 Scanner Displacement, [µm*] F ig.12. F orce-displacem ent curve using cantileverA with a G lass sam ple. 0 200 Magnitude 14 nN DC Gain = 0.23 180 160 -1 10 17.6 nN DC Gain = 0.12 140 Force Set-point 120 * Force, [nN ] -2 2 10 Phase, [degree] 10 Frequency, [Hz] F ig.14. In-contact frequency response using cantilever A with a G lasssam ple:14nN fordi®erentam plitudes. 10 10 3 10 3 10 Frequency, [Hz] 0 100 80 60 40 -100 20 0 -200 2 10 3 10 Frequency, [Hz] F ig.13. In-contact frequency response using cantilever A with a G lasssam ple:sam e am plitude fordi®erentset-points. gain issm allerandthe 380H z bending m ode hasa sm aller resonance peak.T he decrease in D C gain suggest thatthe e®ective contactsti®nesshasdecreased, hence, the scanner displacem ent (F ig. 9) istransm itted m ore to the sm aller sti®ness;the contact' s.T he sm allerresonance peak could bedueto two reasons;thefrequency ofthezero-pairassociated w ith the bending m ode hasslightly decreased forthe largerset-point. H ence, allow ing the contribution of the bending m ode to appearlessprom inent in the response. In addition, it could be a result ofchangesin the dissipative propertiesofthe contactw ith changesin the set-point. Itisim portantto realize thatthe bending m ode resonance frequency did notchange.T he contact forcesare ordersof m agnitude sm allerthan the force the scannercan provide, (»100 snN vs.»1N ). T he e®ect ofexcitation am plitude, i. e.sam ple topography, on the frequency response isshow n in F ig. 14, for set-point of 14nN . It isseen that the largerthe am plitude ofexcitation, the sm allerthe D C gain.F orthe larger input am plitude, m ore plastic deform ation m ight occurin the contact due to the largercontact force, w hich in turn reducesthe e®ective contactsti®ness.A sbefore, m ore displacem ent istransm itted to the sam ple, hence, reducing the D C gain. T he m ore plastic deform ation there is, the sm allerthe changein contactsti®ness, andhence D C gain. T he resonance peak also changes due to changes in the -20 -1.2 -0.8 -0.4 0 0.4 0.8 * Displacement, [µm ] 1.2 1.6 2 F ig.15. F orce-displacem ent curve using cantileverB with a PD M S sam ple. frequency ofthe bending m ode zero-pair. F igure 15, show s the force-displacem ent curve forthe PD M S sam ple.T he penetration region seem squite nonlinear.T hisim pliesthat w hatisbeing m easured by the PSD signal, at least in part, isthe deform ation of the sam ple. T he observationsin F ig.16, are that increasing the input am plitude reducesthe D C gain, the frequency ofbendingm ode zeros, and consequently increasing resonance peak. T hissuggeststhatthecontactsti®nessincreasesw ith larger am plitude, w hich agrees w ith F ig. 15. In addition, increasing set-point, F ig.17, resultsin pole-zero °ipping for the ¯rst two bending m odes. T he frequency of the zeros changesfrom being higherto being lowerthan that ofthe associated m ode. T hisisin agreem ent w ith m odelpredications in section V -B , (F ig. 10). H ence, contact and cantileversti®nessvaluesare relatively close. T he m odelcan be furtherim provedon to include nonlinearitiesin the contact a®ecting the D C gain and dam ping. T hese nonlinearitiesdepend in great part on propertiesof the sam ple. H ence, the form of this dependence is not know n. It ispossible to account forit in the m odel by generalizing the probe-sam ple force to include dissipative term sand retain higherorderterm s.T herefore, eqn.(11), changesto f(zc;_ zc;zp;_ zp;µpy;µp_ y;zs). 90 0 Magnitude 10 4 nm 17 nm Actual cantilever trace 80 70 -1 10 60 42 nm 10 2 10 3 10 Frequency, [Hz] 200 Height, [nm] 85 nm -2 50 Averaged Image 40 30 20 0 10 -100 0 Phase, [degree] 100 -200 2 10 -10 3 0 10 Frequency, [Hz] F ig.16. In-contact frequency response using cantilever B with a PD M S sam ple:36nN fordi®erentam plitudes. Sample 0.5 1 1.5 Lateral Displacement, [µm] F ig.18. Scanning sim ulation resultsofcalibration stepsusing a PI controller. 120 0 10 Magnitude 36 nN 100 -1 10 80 10 2 10 3 10 Frequency, [Hz] Phase, [degree] 100 Height [nm] 113 nN -2 60 40 0 20 -100 0 -200 2 10 3 10 Frequency, [Hz] F ig.17. In-contact frequency response using cantilever B with a PD M S sam ple:17nm am plitude fordi®erentset-points. D .Scanning Sim ulation vs.E xperim ents T he m odelswere used to perform scanning sim ulations. T he sam ple shape used in sim ulation is an experim ental A F M im age ofcalibration steps.F igure 18, show sthe sim ulated im age vs. the actualsam ple. It can be seen that the sam pled and averaged im age generated from the piezo voltage, V z, does not correspond well to the actual im age. T he cantileveroscillationscausesit to loose contact w ith the sam ple and the ham m ering action could in fact be dam aging to the actualsam ple.A F M im age show n in F ig. 19 isof the stepsused in the sim ulation. T he sim ulationspredict the actual response w ell. A lso note the oscillationsobserved in F ig. 19. T hese oscillationsintroducesan artifact that could be interpreted incorrectly as surface roughness. E .Perform ance L im itations D ue to Scanner B ending M ode -20 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 Position [µm] F ig.19. A F M im age ofcalibration stepsusing a PI controller. di®erent calibration factor, even ifthe nonlinearity ofthe scannerwasnot a concern.T he change in calibration due to scannerbending istypically lessthan 1% . Scannerextension m ode istypically around 4to 8kH z. T he required feedback bandw idth during scanning can be estim ated based on scan rate and im age resolution (num ber of data points per scan line). F or a scan rate of 2H z and a resolution of 512, the bandw idth would be 2£ 2£ 512=1000= 2: 048kH z. H ence, the bending resonance at 380H z wouldbe wellw ithin the feedback bandw idth.Tuning the controllergainsto achieve a high bandw idth wouldresultin oscillationsin the im age.T hiscan be seen in F ig.20, w here oscillationsdue to the 380H z m ode is observed in an experim ental A F M im age. Increasing forceset-pointtendsto m akethebending m odelessobservable by m oving the zeroscloserto thatpoles.H ow ever, the high contactforce m ay cause dam age to the sam ple and/or reduce im age resolution.A lternatively, the bandw idth can be reduced along w ith scan speed.T hisresultsin a longer scan tim e m aking scannercreepm ore observable in the im age.Further, sincethe bending m odeistheclosestm odeto the j! axis, F ig.11, ithasa greate®ecton the robustness ofthe feedback system .Pole-zero °ipping can cause closed looppolesto crossthe j! axiscausing feedback instability. T he coupling between scanner bending and extension m odeshasa greatim pact on A F M perform ance in several ways.W hen the scanneriscom m anded to m ove up/dow n, there isa slight bending m otion that getsdetected by the PSD .T hescanneristypically calibratedby im aging a standardofknow n height usually in the 100nm range.D uring F .C reep C om pensation im aging, the PSD signal w ill change due to the sam ple A 3rdorderL T I ¯lterwasused to com pensate forcreep topography aswellasto bending ofthe actuator.Im agining a sam ple ofa di®erent height w illresult in a slightly in the A F M piezoelectric scanner, [12]. T he perform ance 1200 Displacement, [µm] 0.56 1.68 1.12 2.24 the m odels. T he results w ithin w ill be used to develop algorithm sthat allow autom ated choice ofkey system param eters, guaranteeing reliable and artifact-free data for any given operating condition (sam ple, cantilever, environm ent).C onsequently, expanding the A F M capabilitiesand perm itting itsuse in a w iderrange ofapplications. Height, [nm] 1000 380 Hz Scanner Bending Mode 800 600 600 400 550 200 500 R eferences 0.34 0 0 0.2 0.4 0.36 0.6 0.38 0.8 1 Time, [s] F ig.20. O scillationsdue to scannerbending m ode in experim ental A F M im age ofa 1046 nm Silicon step. Displacement, [µm] 700 1.4 Height, [nm] 600 4.2 2.8 5.6 Compensated Uncompensated 500 400 300 200 100 0 0 0.5 1 1.5 2 Time, [s] F ig.21. A F M im ageof530nm Silicon steps, with and withoutcreep com pensation, 2: 8¹m =s. ofthe ¯lterwastested, e. g.F ig.21, by im aging 530and 1590nm steps.W ith com pensation, thecreepresponsewas reduced to 2: 6% w ith com pensation forim agestaken over 6: 67 m inutes. C om pensation did not degrade for larger steps, suggesting that the a linearm odelforcreep m ay be justi¯ed. N onlinearitiesin the scannerfast displacem ent can be dealt w ith separately. C losed loop operation can o®erbettercreep com pensation but is a m ore expensive option. In addition, it reducesim age resolution forsm all scans/sam ple featuresdue to lim ited dynam ic range ofthe sensorsata high bandw idth. V I.Summary and C onclusion T he quality ofA F M data strongly dependson scan and controllerparam eters.D ata artifactscan result from poor dynam ic response of the instrum ent. In orderto achieve reliable data, dynam ic interactionsbetw een A F M com ponentsneed to be wellunderstood and controlled. In this paperwe presented a sum m ary ofourwork in thisdirection.It included m odelsforthe probe-sam ple interaction, scannerlateraland longitudinaldynam ics, scannercreep, and cantileverdynam ics. T he m odelsw ere used to study thee®ectofscan param eterson thesystem dynam ics.Sim ulation resultsforboth frequency response and im aging were presented.E xperim entalresultswere given supporting the sim ulationsand dem onstrating the com petence of [1] A .M .H om ola, J.N .Israelachvili, M .L .G ee, and P.M .M cG uiggan, M easurem ents of and R elation B etween the A dhesion and F riction of 2 Surfaces Separated by M olecularly T hin L iquidF ilm s,JournalofTribology, V ol.111(4), pp.675-682, 1989. [2] E l R ifai, O .M ., and Y oucef-Toum i, K ., O n F actors A ®ecting T he Perform ance ofA tom ic Force M icroscopesin C ontact-m ode, 1999 IEE E /A SM E InternationalC onference on A dvanced Intelligent M echatronics, A tlanta, G A , U SA , 19-23 Septem ber, 1999, pp.21-26. [3] N .A .B urnham , O .P.B ehrend, F .O ulevey, G .G rem aud, P-J G allo, D .G ourdon, E.D upas, A .J.K ulik, H .M .Pollock, and G .A .B riggs, H ow D oesa T ip T ap, N anotechnology, V ol.8, pp. 67-75, 1997. [4] E lR ifai, O .M . , and Y oucef-T oum i, K ., D ynam ics of C ontactm ode A tom ic Force M icroscopes, A m erican C ontrolC onference, C hicago, Illinois, U SA , June 28-30, 2000. [5] E lR ifai, O sam ah M . , and Y oucef-Toum i, K am al, C oupling in Piezoelectric T ubeScannersU sedin ScanningProbeM icroscopes, A m erican C ontrolC onference, A rlington, V irginia, U SA , June2527, 2001. [6] D .M augis, A dhesion of Spheres:T he JK R -D M T T ransition U sing a D ugdale M odel, JournalofC olloid and InterfaceScience, V ol.150(1), pp.243-269, 1992. [7] K .L .Johnson, C ontinuum M echanicsM odeling ofA dhesion and F riction, L angm uir, V ol.12, pp.4510-4513, 1996. [8] T etsuo O hara, and K .Y oucef-Toum i, D ynam ics and C ontrol ofPiezotube A ctuatorsforSubnanom eterPrecision A pplications, Proceedingsofthe A m erican C ontrolC onference, Seattle, W ashington, pp.3808-3812, June 1995. [9] T aylorM .E., D ynam icsofPiezoelectric T ube ScannersforScanning Probe M icroscopy, R eview ofScienti¯c Instrum entsV ol.64 (1), pp.154-158, January 1993. [10] Stavely Sensors Inc., E B L Product L ine C atalog, 91 Prestige Park C ircle, E astH artford, C T 06108-1918. [11] O sam ah ElR ifai, andK am alY oucef-Toum i, M odeling ofA tom ic F orce M icroscope D ynam ics,to appear [12] E lR ifai, O sam ah M . , andY oucef-T oum i, K am al, C reepin Piezoelectric ScannersofA tom ic F orce M icroscopes, to appear