Applic ationofStereo Im agingto Atom ic Forc e M ic roscopy
advertisement

Applic ationofStereo Im agingto Atom ic Forc e
M ic rosc opy
B ernard o D.Aum ond ,and K am alY ouc ef
-T oumi
Abstrac t| M etrol
ogic ald ata f
rom sam pl
e surf
ac esc anb e
ob tain
ed b yusin
ga varietyofpro¯l
om etrym ethod s.Atom ic
Forc e M ic rosc opy (AF M ), w hic h rel
ies on c on
tac t in
teratom ic f
orc esto extrac t top ographic alim agesofa sam pl
e,
ison
e suc h m ethod that c anb e used ona w id e ran
ge ofsurf
ac e types,w ith possib l
en
an
om eter ran
ge resol
ution
.How ever, AF M im agesare c om m on
l
y d istorted b y c on
vol
ution
,
w hic h red uc esm etrol
ogic alac c urac y. T histyp e ofd istortionis m ore sign
i¯c an
t w henthe sam pl
e surf
ac e c on
tain
s
high aspec t ratio f
eaturessuc h asl
in
es,stepsor sharp ed ges
- struc turesc om m on
l
yf
oun
d insem ic on
d uc tor d evic esan
d
appl
ic ation
s.Aim in
gat m itigatin
gthese d istortion
san
d rec overin
g m etrol
ogy soun
dn
ess, w e in
trod uc e a n
ovelim age
d ec on
vol
utionsc hem e b ased onthe prin
c ipl
e ofstereo im agin
g.M ul
tipl
e im agesofa sam pl
e, takenat d i®eren
t an
gl
es,
al
l
ow f
or separationofc on
vol
utionartif
ac tsf
rom true top ographic d ata.Asa resul
t, perf
ec t sam pl
e rec on
struc tion
an
d prob e shap e estim ationc anb e ac hieved inc ertainc ases.
Ad d ition
al
l
y, shad ow z on
es, w hic h are areasofthe sam pl
e
that c an
n
ot b e prob ed b y the AF M , are greatl
y red uc ed .
y the sole point ofc on
tac t
M ost im portan
tl
y, thistec hn
ique d oesn
ot require a priori F ig.1. T he prob e apex isnot nec essaril
or high aspec t ratio sam pl
es. Variouspositionsofthe prob e al
ong
prob e c harac teriz ation
.It al
so red uc esthe n
eed f
or sl
en
d er f
the sc anare portrayed .
or sharper prob es, w hic h, onon
e han
d , in
d uc e l
essc on
vol
utiond istortionb ut,onthe other han
d ,are m ore pron
e to
w ear an
d d am age,thusd ec reasin
goveral
lsystem rel
iab il
ity.
K eyw ord s| M etrol
ogy,P ro¯l
om eter,Atom ic Forc e M ic rosc op e, Dec on
vol
ution
, Stereo Im agin
g
I. Introd ucti
on
S
U R FA CE characteristics such as topography and criticaldimensions, roughness and the area density,shape
and location ofdefects often serve as importantindicators
ofproductqualityandmanufacturingprocessperformance.
Forsuchreasons,surfacecharacterizationproceduresareof
primary importancein awide rangeoftechnological¯elds
and across industries. In addition, high precision characterization has played an increasingly importantrole as
therequireddimensions ofsemiconductorandothermicrofabricated devices continue to shrink into the nanometer
and micrometerdomains [1 ]
.
V arious technologies existthatcanbeusedforobtaining
high precision images ofsurfaces. T he A tomic Force M icroscope(A FM )is onesuchtoolthatcanbeusedtopro¯le
samples,with possible nanometerlevelresolution [2]
.T he
A FM generates topographical images via van der W aals
forces thatarisefrom directcontactbetweenasharp probe
and a surface. T herefore, this imaging toolcan be used
tomeasure severaldi®erenttypes ofsurfaces regardless of
otherphysicalattributes such as re° ectivity, conductivity
ormagnetism.Itobviously circumvents resolution limitationsintroducedbydi®ractionphenomena,associatedwith
opticaltools,orby¯niteelectron escapedepth,associated
with SEM imaging.In addition tothat,A FM images consistofthree dimensionaltopographicmaps ofthe surface
and are, forthis reason, idealforcross sectionalmetrol-
ogy applications.H owever, despite the A FM '
s versatility
and high resolution, its metrology accuracy is limited by
the sizeand shapeoftheemployed probe[3]duetoimage
convolution.
Image convolution expresses itselfin the form ofloss of
surfacedetailanddullingofhighaspectratiofeatures.T his
type ofdistortion occurs when, during the scanning process,the contactpointbetween the probe and the sample
is notthe apex ofthe probe butits sideinstead,as shown
in Figure 1 . In otherwords, during the imaging process,
the probe is always externally tangenttothe surface,and
as aresult,theimageis adilatedversion oftheunderlying
sample.D ilationdistortions introduceerrorsinthemetrologydataobtainedfrom thesurface[4]
.A s aresult,critical
dimensions such as linewidth ofsteps orradius ofcurvature ofhigh aspectratiostructures (such as ¯eld emission
probes and high precision cutting edges)become inaccurate [5].
For the sake of semantic accuracy, it should be noted
that the term convolution does not strictly apply to the
mechanism ofimage formation in A FM .Ithas been commonlyemployedeventhoughnoconvolutionoccurs during
imaging;dilation instead,is thecorrectinteraction model.
In order to circumvent these limitations, deconvolution algorithms must be developed. T hese restoration
procedures should eliminate metrology distortions in the
nanometerleveland should also be compatible with high
volumeinspection tasks.P roposed methodologies mustbe
robust,reliable and easy toimplementwith commercially
availableA FM units.
In section II, we introduce the mechanisms of image
formation and how they give rise to convolution. In section III,webrie° y explain stateofthearttechniques that
can beused forimagerestoration.In section IV ,weintroduceanovelstereoimagingprocedurethatcanbeusedfor
restoringsampletopographiesandthatcanalsobeusedfor
probe shape estimation and ¯nally in section V , we show
introductoryresults thatillustratethecapabilitiesandversatility ofthis newtechnique.
II. IM AG E C O NV O L U T IO N
T here exist two widely accepted mechanisms of image
formationforA FM .O nemechanism modelis basedonthe
conceptofL egendre T ransforms [6]
, [7]and relies on the
assumption thatatcontactpoints duringscan, the probe
andthesamplesurfacesharethesamegradientortangent. F ig.2 . M ec hanism ofim age form ationb ased onthe Legend re T ransIn Figure 2, let S (m)be the intercept of the tangent form m od el.
linethrough thetruecontactpointwith theverticalimage
axis;atthatcontactpointthe sample slope is denoted by
m and S (m)is denoted the \ L egendre T ransform ofthe
probe shape atthe derivative m".L etI(m)be the intercept of the parallel line through the image point (probe
apex)with theverticalimageaxis.Ithas been shown elsewhere[7]thattheimagewillalsohavederivativem atthat
point.Finally,letP (m)betheinterceptofthetangentline
throughthetruecontactpointwiththeprobeverticalaxis.
T he followingrelationship holds:
S (m)= I(m)+ P (m)
(1 )
G ivenasurfacedescriptiony = y(x),itsL egendreT rans- F ig.3. M ec hanism ofim age form ationb ased onthe d ilationm od el.
dy
(a) T he prob e isexternal
lytangen
t to the sam pl
e d uringthe sc anning,
form atany derivativem = d
x is given by:
Y (m)= y(x(m))¡m:x
(2)
generatingthe im age.(b ) A d ualand equivalen
t in
terpretationisthat
the im age isthe c omb ined vol
um e ofthe translatesofthe (re°ec ted )
prob e.
Conversely, if the L egendre T ransform of a curve is
known, its Cartesian description can be obtained by apA second mechanism ofimage formation thatis general
plyingthe followinginversetransform:
and makes nogeometricassumptions is based on the concept ofmorphologicaldilation [4]
, [8]
, [9]
, [1 0 ]
. T he image ofa sample is a dilated version ofthe sample and the
d[Y (m)]
x = ¡
structuringelementis considered tobethere° ected probe
dm
shape.T hatis:
d[Y (m)]
y = Y (m)¡m(
)
I= S ©P·
(4)
dm
y = y(x)
(3) where P·is there° ected version oftheprobeshapeP ,and
S is the sample shapeand I,the resultingimage.
T herefore, if the shape of the probe and the shape of
Inotherwords,ifoneplacesacopyofthere° ectedprobe
the sample are known, theirL egendre T ransforms can be on every single pointofthe sample surface, with the reobtained according to Equation (2). T hen, the L egendre ° ectedprobeapexcoincidingwith thatsurfacepoint,then
T ransform oftheresultingimagecan becomputedaccord- the surface ofthe resultingcombined volume ofalltransing to Equation (1 ). A nd ¯nally, the shape of the re- lates ofthese re° ected probes willconstitute the image of
sulting image can be calculated using Equation set (3). the sampletaken with thatspeci¯cprobe (Figure3).
H owever,even though the linearrelationship expressed in
A quickanalysis ofEquation (4)(andofEquation(1 )as
Equation (1 )is simple and straightforward, some implicit well)reveals somestraightforward conclusions thatcan be
assumptions exist. Firstly, the sample and probe geome- summarized in the followingcases:
tries must be continuous and, secondly, the sample and ² Case 1: Ifthe shape ofthe prob e isexac tly know nand the im probe geometries mustnothave repeated slopes, thatis, age isalso know n, thenb y applying a reverse m ec hanism ofim age
theymustbeconvex.T his reduces theapplicabilityofthis form ation, the sam ple shape c ould b e c om puted , and c onvolution
d istortions,el
im inated .
mechanism ofimageformation tosimplerand wellde¯ned ² Case 2 : Conversely, ifthe sam ple shape isexac tly know nand the
problems where the implicitassumptions hold [5]
,[7]
.
im age isalso know n,thenb y appl
yinga reverse m ec hanism ofim age
f
orm ation,the prob e shape c ould b e c om puted .
² Case 3: Ifthe prob e isvery sharp c om pared to the sam pl
e d im ensions,thenthe im age shape w il
lb e very sim il
ar to the sam pl
e shape,
the prob e c ontrib utionb eingnegl
igib le to im age f
orm ation.
² Case 4 : Con
versel
y, ifthe sam pl
e isvery sharp c om pared to the
prob e d im ensions, thenthe im age shape w il
lb e very sim ilar to the
re°ec ted prob e shape, the sam ple c on
trib utionb eing negl
igib le to
im age f
orm ation.
T heseconclusions arethemotivation behindcurrentdeconvolution orconvolution minimization strategies as we
discuss is section III.
III. STAT E O F T H E AR T IN IM AG E
D EC O NV O L U T IO N
In ordertorecovermetrology accuracy,convolution distortions mustbe eliminated from A FM images. Current
deconvolution strategies are based on the realization that
Equation(4)(orEquation(1 ))establishasystem withtwo
unknowns, the probe and the sample geometries (ortheir
L egendretransforms),andoneknown,theimagegeometry
(oritsL egendretransform).Inordertosolvesuchanunder
constrainedsystem,onevariablemustbedetermined;that
can be accomplished by probe characterization. A nother
approach is tomake the probe sosharp thatits contribution to image formation becomes negligible. T hatwould
be equivalent to making P· in Equation (4) or P (m) in
Equation (1 )vanish. T hat is, the system collapses into
oneknown andoneunknown andcan besolved.T hemost
popularapproach though, called blind deconvolution, establishes an estimate forthe probe shape,and as aresult,
asample estimatecan bealsoobtained.
A .H igh A spectR atioP robes
Convolution distortions are proportional to the probe
sizerelativetothesamplesize.T herefore,sharp andsmall
probes can be used to minimize convolution distortions,
accordingtoCase 3 in section II.
Sharp probes can be obtained by FIB milling conventionalA FM probes.Sharpened probes existin themarket
with typicalradius ofcurvature of5 to 20 nm. H owever,
forstatisticalreasons orquality assurance considerations,
high volumeinspectionhas becomearequirementin many
applications.T herefore, long lasting probes mustbe employedinordertominimizeprobereplacementduetowear
orfailure.Sharpenedandslenderprobes aremoreproneto
failurethan theirlargercounterparts and therefore reduce
theoverallreliability and speed oftheinspection system.
R ecently,carbonnanotubeshavebeenemployedinA FM
imaging.N anotubes areused as probes duetotheirsharp
geometryandmechanicalresilience.T hecarbonnanotubes
consistofperfectand seamless graphiteshells with dimensions of typically 1 nm in diameter and several microns
in length.T he slenderness ofthese nanotubes may allow
forimagingofhigh aspectratiosurface features with very
smallconvolution distortions. H owever, fabrication techniques haveyettobere¯ned [1 1 ]and,additionally,lateral
° exing of the tube is still a problem when imaging tall
structures.A s a resultofthese limitations, imaging with
ultrahigh aspectratioprobes has been mostlycon¯ned to
F ig.4 . B lind prob e rec onstruc tion.(a) O riginalSc an.(b ) P eaksin
im age are °agged .(c ) P rob e estim atesare ob tained f
rom the ind ivid ualpeaksand the m inimum envelop takenasthe ¯nalprob e estim ate.
(d ) Com parisonb etw eenac tualand rec onstruc ted prob e.
o®lineinspectiontasks wherescanspeeds areslowerinordertoavoidtip crashes,° exion orexcessivewear.U sually,
intermittentcontactscanningis used in thesecases.
B .P robe Characterization
D econvolution can alsobe accomplished by establishing
theshapeoftheprobeandthensolvingtheinverseproblem
establishedbyEquation (4)orbyEquation(1 ),depending
on which mechanism ofimage formation is used toformulate the problem.A ccording to Case 2 in section II, one
could useasampleofknown shape,thatis,astandard,in
ordertoestablishtheprobeshape;thisiscommonlyknown
as probe characterization. Commonly used characterization standards include high precision silicon gratings [3]
,
[7]
,blades,otherA FM tips,colloidalgold articles [1 2]
,latex particles [1 3]
,etc.
.
.
T heproblems associatedwithprobecharacterizationare
the following:(1 )T he shape ofthe characterization standard in never perfectly known and manufacturing tolerances for commercially available standards range from 5
to 20 nm [1 4]
, which is on the same order of magnitude
ofthe size ofthe probes themselves [1 5]
. T herefore, the
shapeoftheprobecannotberecovered with thenecessary
precision.(2)Since probes wearwith use, frequentcharacterizations arenecessarytore-establishtheprobeshape,
decreasinginspectionthroughputand,¯nally,(3)thestandarditselfmustbekeptintactandcleanthroughoutits life
span,which adds toprocess complexity.T herefore,probe
characterization has only been used on aqualitativebasis,
as ameans toassess probe wearordetectprobefailure.
C.B lind R econstruction
A nothercurrentlyusedmethodologyforimagedeconvolution is the so called blind reconstruction [1 6]
, [1 7]
, [1 8]
procedure and its variations.T his technique allows forestimation of the probe shape without a priori knowledge
ofthe surface ofthe characterization standard;it, therefore, removes the requirement for any calibration of the
standard. H owever, this estimate consists ofonly an upperbound forthe probe shape and its quality is a strong
function ofthe surfacefeatures found on the standard.
B lind reconstruction has its basis on the dilation interpretation forimage formation.Itassumes,therefore,that
theimageisessentiallythesurfaceofthecombinedvolumes
ofalltranslates ofthe re° ected probe tip as the re° ected
probe apex is lined up with each sample surface point.
T hus, the (re° ected)probe pro¯le is always bounded by
the image.Crude estimates ofthe probe pro¯le can then
bemadesimply by takingthesharpestfeatures presentin
the image.T hatshould serve as an upperbound forthe
A FM probe shape.In fact, ifthe surface portrays an in¯nitely sharp protrusion,the image ofthatsurface should
beidenticaltothere° ectedprobeshape,accordingtoCase
4 in section II.Foran A FM probe with a single tip (discarding pathologicalcases ofprobes with split tips), the
blind reconstruction procedure can be reduced to the followingrecipe:(1 )identify peaks in the image,(2)use the F ig.5. P rob e estim ates(ind ivid ual).(a) Sam ple surfac e w ith large
peakregions toestimatethere° ected probeshapeand (3) c orrelationlength.(b ) R esultingprob e estim ate ispoor.(c ) Sam ple
overlaytheseestimates,liningup atthepeaks andtakethe w ith sm allc orrelationlength.(d ) R esultingprob e estim ate isgood .
minimum envelopeofthecombinedpro¯les as there° ected
probeestimate.Figure4 illustrates theprocess.
A s mentioned before, since probe estimation by blind
reconstruction is implemented usingonly the image data,
the quality ofthe probe estimate is highly dependenton
theimageitself,as demonstrated in R ef.[9]
.Forinstance,
a smooth surface would yield fewdistinctpeaks in its image and thus have limited utility in this mode of probe
estimation.O n theotherhand,asurfacewith high aspect
ratiofeatures would producean imagewith sharp features
andthereforeamoreaccurateprobeestimate.InFigure5,
we see the resulting probe estimate made using two surfaces with the same peak topeak R M S butwith di®ering
correlation lengths (which is theaveragewavelength ofthe
surface).Clearly,thequalityoftheprobeestimationis signi¯cantlybetterforthesurfacewiththesmallercorrelation F ig.6. Inb oth (a) and (b ), the sam e im age c ould b e ob tained
w ith a sw apped set ofprob e and sam ple. T hat is, inb oth c ases,
length,thatis,with sharperfeatures.
E quation(4 ) issatis¯ed .T heref
ore,the b est possib l
e prob e estim ate
(upper b ound ) isP robe 1 asshow nin(a) eventhough the realprob e
geom etry m ay b e P robe 2 asshow nin(b ).
Since it is hard to guess the sharpness of features on
the characterization standard, the quality ofthe estimate
cannotbe precisely determined either.T herefore, the deIV . ST ER EO IM AG ING
convolvedA FM images thatusesuch probeestimates may
lack accuracy due to poorprobe estimation. T his ambiW e propose a new approach to image deconvolution
guity in probe estimation can beillustrated as depicted in
called Stereo Imaging. In this approach, two images of
Figure 6. In short, a certain image can be generated by
the same sample are obtained atdi®erentvantage points.
an in¯nitenumberofappropriatesample/probepairs that
T hat is, the sample is mechanically rotated relatively to
satisfy Equation (4).
the probe priortothe second scan.Since the rotation angle can be speci¯ed, one obtains the following system of
A s a conclusion, even though estimation schemes ex- equations:
ist,theystillnecessitatespecialcharacterizationstandards
thathavefeaturesmuchsmallerthantheprobe.Suchstandards maybe di±cultto obtain, maintain orcharacterize.
I
= S ©P·
1
A dditionally, forthe same reasons laid outin section IIII
= S ¤©P·
2
B , frequentestimation may lead to lowerthroughput. It
S ¤ = R ot(S ;µ)
(5)
would be desirable, then, to develop a methodology that
does not require special characterization standards, that
can deliverhigh quality probe estimates forimage decon- IfS isthesetofallpointsfx;yg pertainingtothesurfaceof
volution,and thatdoes notreduce throughputorincrease thesample,then S ¤willbecomposed ofpoints fxr;yrg as
complexity signi¯cantly.
determinedbytherotationoperatorshowninEquation(6).
F ig.7. T w o im agesf
rom d i®erent van
tage points.(a) Sam ple til
ted
b y ¡¼ =10 rad iansand resulting im age ob tained w ith the portrayed
prob e.(b ) Sec ond im age ob tained b y rotatingthe sam ple b y ¼ =10 rad iansf
rom the vertic ald irec tion.B oth im agesare b lun
t and d istorted
versionsofthe high aspec t ratio sam ple d ue to c on
vol
ution.
½
xr
yr
¾
=
·
cos(µ) ¡sin(µ)
sin(µ) cos(µ)
¸½
x
y
¾
F ig.8. P rob e and sam ple initialestim ation.(a) and (b ) portray the
resultsofprob e estim ationb y b l
ind d ec on
vol
utionf
or eac h im age.
T he estim atesare signi¯c an
t d i®eren
t thanthe originalprob e shape.
In(c ), estim ate c omb inationyiel
d sa slightl
y tighter estim ate. (d )
and (e) are sam ple estim ationsf
or eac h vantage poin
t ob tained b y
erosionw ith the new c omb ined prob e estim ate. (f) show sthe new
sam ple estim ate b y overl
ay ofthe previousestim ates.T hisestim ate
issom ehow c l
oser to the realsam ple shape b ut f
ar f
rom prec ise.
(6)
Equation (5)de¯nes a system with two equations and
twounknowns and therefore can be solved forboth probe
and sample geometry without the need for priorcharacterization. T he rotation ofthe sample provides an extra
constraintforestimation;as aresult,estimationambiguity
is greatly reduced.
T he steps involved in stereo imaging include: (1 )obtainingtwoimages ofthesample;(2)estimatingtheprobe
shape by blind deconvolution;(3)combining probe estimates byoverlay;(4)generatingsampleestimates by Erosion;(5)combiningsampleestimates byoverlay;(6)sharpening the probe estimates. Steps (3)though (6)are repeated untilconvergence is reached.Furtherexplanations
follow.
T he ¯rststep ofthe methodology consists ofobtaining
twoimages ofthe same sample atdi®erentangles as seen
in Figure 7.T he sample rotation is obtained by means of
ahighprecisiontiltactuationsystem.Inthis example,the
sample is chosen to have a high aspectratio.N otice how
theimagesareblunterandwiderversionsoftheunderlying
sample due to convolution. A lso, in this example, in the
¯rstimage the sample is tilted by ¡¼=1 0 radians and in
thesecond image,the sampleis tilted by ¼=1 0 radians.
N ext,blind deconvolution is used toestimate the probe
geometry foreach image.T he estimates are combined by
simplyoverlayingthem.A sharperestimatefortheprobeis
obtained.T his probe estimate is used togenerate sample
estimates based on each image. T he process of sample
estimation given a probe estimate is called Erosion and
corresponds totheinversemechanism ofimage formation.
Itcan be done by simply scanning the underside ofthe
images withthere° ectedprobeestimateandrecordingthe
re° ected probe apex position ateach translate.Complete
discussions on Erosion can befound in R efs.[1 0 ]
,[1 6]
,[1 7]
and [1 8]
.
T he sample estimates are combined to generate a new
one by simply overlayingthem.P riortooverlay,the sample estimates are broughtto an uprightposition.In Figure8(f),thenotch atthetop ofnewestimateis duetothe
overlay ofthe sample estimates.Itshould be clearatthis
stage thatthe overlaying operation relies on an accurate
knowledge of the rotation angle µ. A lso, if there is any
spurious translation duringthetiltingprocess,images will
be displaced and so willbe the initial sample estimates.
A s a result, during the overlay, sample estimates willfall
outofplace generatingan inaccurate newestimate.T his
creates theneedforhighprecisiontiltactuators (lowradial
runout).In addition,itrequires thatthe relative position
of the rotation axis with respect to the A FM frame be
known atalltimes,which can be achieved by calibration.
A n alternativetothatis thescanningofreferencefeatures
before and afterrotation toallowforidenti¯cation ofany
spurious translation thatmighthave occured duringtilt.
N ow,thenewprobeestimatemustbesharpenedinorder
tosatisfy Equation set(5).T he process ofsharpeningthe
probeestimateincludesthefollowingsteps:(1 )P laceprobe
estimate in acertain pointP 1 alongthe image.(2)V erify
ifthe probe estimate interferes with the sample estimate.
(3)T rim orsharpen interfering regions ofthe probe. (4)
R epeatprocedure forallpoints P i along one image. (5)
R epeatprocedureforthesecond image.
T hesharpeningproceduremakes surethateachimageis
adilationoftheestimatedsamplebyastructuringelement
with the shape ofthe re° ected probe estimate.T hatis,it
forces the estimates tosatisfy Equation set(5)
T he sharpening operation reduces ambiguity around
sampleand probeestimation.T his is sobecausethespace
ofsolutions forprobe and sample geometry satisfyingone
constraint as established in Equation (4) is necessarily
F ig.9 . (a) P rob e E stim ate must b e alw aysexternall
y tangen
t to
sam ple estim ate inord er to satisf
y E quation(4 ).T heref
ore, the interf
ering regionmust b e trim m ed f
rom the prob e estim ate. As a
result,the prob e estim ate issharpened asshow nin(b ).
F ig.11. (a) Con
ven
tionalAF M im age w ith sam pl
e inthe upright
position(µ = 0 ).(b ) T w o im agesob tained b y tilting the sam pl
e by
µ = §¼ =10 rad ians.
V . PR EL IM INAR Y R ESUL T S
F ig.10 . E volutionofestim ates.Sketc hes(a) and (d ) show prob e and
sam ple estim atesb ased ona c omb inationofb lind estim ates. Since
the sam pl
e isnot very sharp,estim atesare very inac c urate.Sketc hes
(b ) and (e) are the resultsofthe ¯rst iterationofthe Stereo Im aging
proc ed ure.E stim atesare greatl
y enhanced .Sketc hes(c ) and (f) are
the results ofthe sec ond iteration. E stim ates and realgeom etries
are id en
tic al
; c on
vergence isreac hed and no signi¯c an
t geom etric al
c hangeshappeninf
urther iterations.
larger than the space of solutions that satisfy two constraints,simultaneously,as establishedinEquationset(5).
Consequently,increasingthenumberofconstraints (orimages at di®erentangles)willeventually reduce the space
toasinglesolution and zeroambiguity.H owever,multiple
imagingistootimeconsumingandtwoimagesseem enough
toaccomplish high precision estimates in mostcases.
T he sharpened probe estimates are then combined by
overlayagain.N ewsampleestimates aregeneratedbyerosion and the whole process is repeated untilnonoticeable
change in the estimates is detectable. T hatis, untilthe
R M S ofthe di®erence between probe estimates from one
iteration toanotheris su±ciently small.T he evolution of
probeand sample estimates is shown in theFigure1 0 .
StereoImagingallows forpreciseestimationofprobegeometries withouta priori probe characterization.T hatis,
probe and sample are estimated simultaneously, and estimationqualityisindependentofthesamplecharacteristics.
In addition tothat,tiltingofthe sample allows the probe
to reach otherwise inaccessible regions. Such regions are
usually called shadowzones.
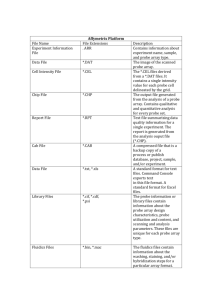
Figure1 1 (a)shows thecross section ofastep feature.It
alsodepicts aprobe,in this case with twoapices,and the
correspondingsimulatedimage.T heimageisadilatedversion ofthe sample and metrology data obtained from this
image would renderinaccurate results (image linewidth ¼
225 nm,samplelinewidth ¼1 50 nm).In addition tothat,
the side walls ofthe step are neverreally touched by the
probe;therefore,noinformation aboutthis shadowzoneis
stored in the image. In this simulation, the step has dimensions compatiblewith microfeatures regularlypresent
in semiconductordevices.T heprobewas chosen tohavea
complicated geometry with a primary radius ofcurvature
ofaround1 0 nm andasecondaryapex.Figure1 1 (b)shows
twoimages obtained by tiltingthe sample.T he side walls
are nowexposed toprobe.
T he results ofboth blind deconvolution estimation (obtainedfrom theimagedepictedinFigure1 1 (a))andstereo
imagingestimation (obtained from the images depicted in
Figure 1 1 (b))are shown in Figure 1 2. Since the sample
has nosharp features,blind estimation provides very poor
results.Infact,theprobecouldnotbeestimatedatallbecausetherewerenosharp peaks in theimageand,as aresult,sampleestimation is poor.O n theotherhand,stereo
imaging estimation results are virtually indistinguishable
from the originalgeometries (estimated linewidth ¼ 1 60
nm ).T he areas ofthe estimation close to the base that
signi¯cantly di®er from the original sample are actually
uncertain reconstruction zones and are ° agged by the algorithm, and should be ignored.U ncertain zones happen
when the probe estimate is in contactwith the sample es-
F ig.12 . (a)P rob e and sam ple estim ationb ased onb lind d ec on
vol
u- F ig.14 . (a) P rob e estim ationb y stereo im aging.(b ) Sam ple estim ation(State ofthe Art). (b ) P rob e and sam ple estim ationb ased on tionb y stereo im aging. Sam pl
e rotated µ = §¼ =2 0 rad ians. P rob e
stereo im aging.R esul
tsaf
ter 3 iterations.
w ith tip rad iusof¼ 10 nm . R esultsaf
ter 5 iterations. (c ) Im age of
the sam pl
e w ith the sam e prob e inupright position.
approach renders good pitch measurementand is a better
depiction ofthe underlying sample than an image ofthe
samesampletaken in theusualuprightposition.T hebottom ofthetrenchestimation(solidgrayline,Figure1 4(b))
is an uncertain reconstruction zone thatis automatically
tagged by the algorithm.In thatzone,the reconstruction
sets un upperbound forthesampletopography,thatis,in
thatregion therealsamplemayhaveanydepth as longas
itis deeperthan the boundary setby theestimation.
V I. C O NC L USIO NS
F ig.13. P rob e and sam ple estim ationb y stereo im aging. Sam ple
rotated µ = §¼ =5 rad ians.P rob e w ith tip rad iusof¼ 2 0 nm .R esults
af
ter 3 iterations.
Convolution e®ects may severely distortmetrology data
obtained with A tomicForce M icroscopes.A lthough some
techniques existthatallowforimage deconvolution, they
mostly fail to deliver high ¯delity topography estimates
and are cumbersome and time consuming, thus reducing
inspection throughput.
B y obtaining two ormore images ofthe sample atdifferentvantage points, stereo imagingcan be used to generate high precision estimates ofboth probe and sample
simultaneously.T herefore,metrology accuracy is ensured,
regardless ofprobe shape orsize.Since the probe geometry is estimated atevery imagingevent,an e®ective probe
monitoringscheme can be implemented.
Since allsteps involved in the StereoImagingapproach
arecarriedoutbysetormorphologicaloperations,its generalizationto3-D andvolumeanalysis(insteadofthecrosssectionalanalysis discussed in this paper)is simple.
Finally,thenextstep ofthisresearchprojectisunderway
and includes experimental tests with calibrated samples
aimingatassessingtherepeatabilityofthemethod as well
as the in° uence ofnoise and scan dynamics e®ects on the
¯nalreconstruction results.
timate in more than one point simultaneously [8], for a
certain position along the image. D uring scanning, such
regions arenottouchedbytheA FM probe,and maybeof
any depth.
Similarresults can be obtained ifaprobe ofcompletely
di®erent geometry is used, as shown in Figure 1 3. A lso
notice thatthe probe geometry used in the simulations is
not sharp or slender, compared to the sample geometry.
D econvolution is achieved in spite ofprobe size orshape.
T his insensitivity to probe shape and size opens the possibility forusinglarge probes.Such probes maybe coated
withD iamondforextendedlifeandmaybeutilizedforsurfacestrengthmeasurements bymicro-indentation,simultaneously with topography measurements.
O nelimitation ofthestereomethodology is thatitdoes
not solve the problem of narrow trenches that are inaccessible to the probe. O nly high aspect ratio probes at
R e fe re nce s
low scan rates, operated in intermittentcontact, can ac[1] Sem ic ond uc tor Ind ustry Assoc iation, \In
ternationalT ec hnol
ogy
cess areas deep into the negative steps.H owever, as seen
R oad m ap f
or Sem ic ond uc tors: 2 0 0 0 upd ate," In
ternationalSE M AT E CH,Austin,T X,2 0 0 0 .
in Figure 1 4, the reconstruction obtained with the stereo
[2 ] B inning, G .
, C.F .Quate and Ch.G erb er, \Atom ic f
orc e m ic rosc ope,"P hysicalR eview Letters56,pp.9 30 {9 33,19 86.
[3] B .D.Aum ond and K .Y ouc ef
-T oum i, \E xperim en
talHigh P rec isionP ro¯lom etry ofHigh Aspec t R atio Sam ples," P roceed in
gs
IE E E In
t.Con
f
.onSystem s, M anan
d Cybern
etic s, SanDiego,
Calif
ornia,pp.4 4 35-4 4 4 0 ,19 9 8.
[4 ] G .S.P ingaliand R .J ain,\R estorationofsc anningprob e m ic rosc ope im ages," P roc .IE E E W orkshop onAppl
ication
sofCom puter Vision
,pp.2 82 -2 89 ,19 9 2 .
[5] B .D.Aum ond and K .Y ouc ef
-T oum i,\High P rec isionStereo P ro¯lom etry b ased onAtom ic Forc e M ic rosc opy T ec hnol
ogy," P roceed in
gsofthe M ec hatron
ic s2 0 0 0 Con
f
eren
ce,Atl
an
ta,G eorgia,
Septemb er,2 0 0 0 .
[6] G ri± th, J . E . and D. A. G riggs, \Dim ensional m etrol
ogy
w ith sc anning prob e m ic rosc opes," J ourn
alofAppl
ied P hysic s
74 ,pp.83{10 9 ,19 9 3
[7] D.K el
ler, \R ec onstruc tionofstm and af
m im agesd istorted b y
¯nite-siz e tips,"Surf
ace Sc ien
ce 2 53,pp.353{364 ,19 9 1.
[8] Vil
larub ia, J .S.
, \M orphol
ogic alestim ationoftip geom etry f
or
sc anned prob e m ic rosc opy," Surf
ace Sc ien
ce 32 1,pp.2 87{30 0 ,
19 9 4 .
[9 ] Y eo,Y .
,B .D.Aum ond and K .Y ouc ef
-T oum i,\P rec isionatom ic
f
orc e m ic rosc ope im aging," P roceed in
gsofthe IE E E 2 0 0 0 In
tern
ation
alCon
f
eren
ce onSign
alP rocessing,B eijing,China,2 0 0 0 .
[10 ] Y eo, Y ee,\Im age P roc essing f
or P rec ision Atom ic Forc e M ic rosc opy,"M ec hanic alE ngineeringM .
S.T hesis,M IT .Camb rid ge,
M assac husetts,2 0 0 0 .
[11] H.Dai, J .H.Haf
ner, A.G .R inzl
er, D.T .Col
b ert and R .
E .Sm al
ley, \Nan
otubes as Nan
oprobes inScan
n
in
g P robe M ic roscopy",Nature 384 ,pp.14 7-151,19 9 6.
[12 ] S.Xu and M .F .Arsd orf
,\Calib rationofthe sc anning(atom ic )
f
orc e m ic rosc ope w ith gold partic les," J . M ic roscopy, 173,
pp.19 9 -2 0 4 ,19 9 4 .
[13] Y .Li and S.M .Lind say, \P ol
ystyrene l
atex partic l
esasa siz e
c al
ib rationf
or the atom ic f
orc e m ic rosc ope," R ev.Sc i.In
strum .
62 (11),pp.2 630 -2 633,19 9 1.
[14 ] NT -M DT Co.
,Com m erc ialstand ard gratings, AF M equipm ent
and ac c essories.B loc k B , South Ind ustrialz one, State R esearc h
Institute ofP hysic al P rob l
em s, Zelenograd , M osc ow , 10 34 60 ,
R U SSIA.
[15] DigitalInstrum en
ts/ Veec o M etrol
ogy G roup,AF M equipm ent
and ac c essories.112 R ob inHillR oad ,San
ta B arb ara,Calif
ornia,
9 3117.
[16] J .S.Villarub ia,\Sc anned prob e m ic rosc ope tip c harac teriz ation
w ithout c alib rated tip c harac teriz ers",J .Vac .Sc i.T ec hnol.B ,14
(2 ),1518-152 1 (19 9 6).
[17] P .M W ill
iam s,K .M .Shakeshe®,M .C.Davies,D.E .J ac kson,
C.J .R ob erts, and S.J .B .T end ler, \B l
ind rec onstruc tionof
sc anningprob e im age d ata",J .Vac .Sc i.T ec hnol.B ,14 (2 ),15571562 (19 9 6).
[18] S.Dongm o, M .T royon, P .Vautrot, E .Delain, and N.B onnet,
\B lind restorationm ethod ofsc anningtunnel
ingand atom ic f
orc e
m ic rosc opy im ages", J .Vac .Sc i.T ec hnol.B , 14 (2 ), 1552 -1556
(19 9 6).