I. Title Page (1 page maximum)
advertisement
")
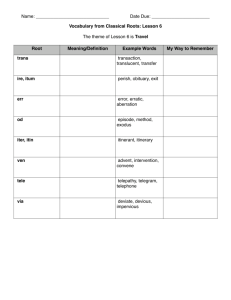
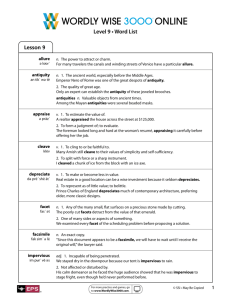
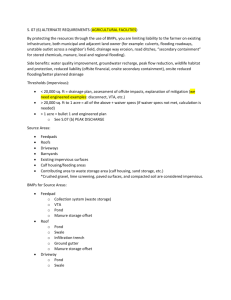
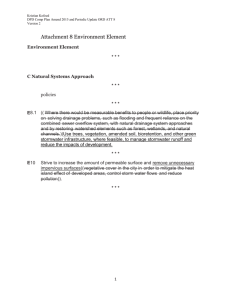
I. Title Page (1 page maximum) Title: Subtheme this proposal is responding to Principal Investigator and Receiving Institution Co-Principal Investigator Agency Collaborator Grants Contact Person Funding requested: Total cost share (value of financial and in-kind contributions): Mapping Hard and Soft Impervious Cover in the Lake Tahoe Basin Using LiDAR and Multispectral Images: A Pilot Study of the Lake Tahoe Land Cover and Disturbance Monitoring Plan. Integrating Science 4a: Understanding current and future resource conditions through analysis of remote sensing data Jarlath O’Neil-Dunne Spatial Informatics Group, LLC 3248 Northampton Ct. Pleasanton, CA 94588 Phone: (802) 598-9678 Fax: (802) 656-8683 Email: jarlath@sig-gis.com Dr. David Saah Spatial Informatics Group, LLC 3248 Northampton Ct. Pleasanton, CA 94588 Phone: (510) 427-3571 Fax: NA Email: dsaah@sig-gis.com Dr. David Saah Spatial Informatics Group, LLC 3248 Northampton Ct. Pleasanton, CA 94588 Phone: (510) 427-3571 Fax: NA Email: dsaah@sig-gis.com Proposal: Tahoe Research Supported by SNPLMA 2010 II. Proposal Narrative (up to 7 pages, single-spaced) a. Project abstract (1 paragraph summary for public distribution) Conversion of land to impervious cover threatens the environmental quality of the Lake Tahoe Basin (LTB) (Bailey 1974) by reducing water percolation into the soil and increasing runoff, and thus sediment, nutrient, and pollutant transfer into Lake Tahoe (Arnold and Gibbons 1996). If impervious cover, both hard (e.g. paved or roofed areas) and soft (e.g. degraded or compacted soil) reaches unsustainable or irreversible levels, the environmental goals or “thresholds” central to management efforts within the Basin and set forth by the Lake Tahoe Restoration Act will be negatively affected. Therefore, effective management and monitoring of impervious surfaces within the LTB requires an impervious cover data set that is detailed, accurate, and meaningful. We propose to leverage existing investments in high-resolution multispectral imagery, Light Detection and Ranging (LiDAR), and vector GIS data to map and quantify impervious cover for the LTB. We will use a repeatable and cost-effective analytical methodology, centered on Object-Based Image Analysis (OBIA) techniques, to map hard and soft impervious cover. This approach will overcome the limitations of previous mapping efforts that did not differentiate between impervious cover classes or ensure that impervious surfaces were properly connected, both of which are vital to management and modeling efforts. The end product will be a spatially detailed, accurate, attribute-rich, and realistic map of impervious cover within the LTB. In order to make the data accessible to other scientists, resource managers, and decision makers, this map and corresponding information will be delineated and summarized by ownership (e.g. parcels), environmental gradients/boundaries (e.g. watershed, soil type, soil capability class) and political boundaries (e.g. counties). Finally, we will pilot implement the proposed “Lake Tahoe Land Cover and Disturbance Monitoring Plan” (Spatial Informatics Group 2009) using the derived impervious surface cover. The results from this pilot and the newly derived impervious cover input data will be compared to the previous assessment to gauge strengths and weaknesses between approaches and, if warranted, recommend ways to retrofit the previous assessment to the new approach. b. Justification statement: explain the relationship between the proposal and the subtheme(s) The Round 11 SNPLMA RFP invites proposals within the “Integrating Science” theme to target Subtheme 4a: understanding current and future resource conditions through analysis of remote sensing data. The stated goal of proposals within this subtheme includes the following: Analyses of these datasets and images are needed to develop information that agencies can use in the future planning of capital projects, to characterize current natural resource conditions, and to provide a baseline for comparison of future conditions resulting from the ongoing implementation of forest management and habitat restoration projects. In this proposal, we target the third component of this subtheme, which is to “analyze datasets [high resolution LiDAR and multispectral imagery from Round 10 funding] to document the location and extent of hard and soft impervious cover.” In addition, the dataset we develop will help support Subtheme 2b: quantifying the benefits of urban stormwater management, which specifically asks, “How does impervious area connectivity and hydrologic routing affect pollutant concentrations and loadings?” Due to the strength and repeatability of the methods proposed, this map and corresponding information will serve as a baseline for continued monitoring efforts in the future. Additionally, we will stratify this map and corresponding information by ownership (e.g. parcel), political (e.g. county), and environmental boundaries (e.g. watershed, soil type, soil capability class) to provide the information needed for current management decisions and assessment of threshold attainment within the many jurisdictions and habitat types of LTB. c. Concise background and problem statement Increased deposition of fine sediment and nutrients are the main factors reducing water clarity in Lake Tahoe (Swift et al. 2006). Land conversion to impervious cover can accelerate sediment and nutrient deposition by “shortcircuiting” the hydrological cycle and increasing soil erosion (TRPA 2001 as cited in TRPA 2007). Other indicators of ecosystem health including pollutant transfer, flooding intensity, stream flow, stream temperature and habitat loss are influenced by the amount of impervious cover (Arnold and Gibbins 1996, Tilley and Slonecker 2007). If II-1 Proposal: Tahoe Research Supported by SNPLMA 2010 impervious cover exists or expands to unsustainable or irreversible levels it will affect all nine “thresholds” or areas of concern for the Tahoe Basin (e.g. wildlife, fisheries, water quality, vegetation etc.) (Minor and Cablk 2004). To control for this, the Tahoe Regional Planning Agency (TRPA) has placed limitations on land conversion (e.g. development) and disturbance (e.g. grading) within the Lake Tahoe Basin (LTB) based on amounts that are considered allowable to meet the soil conservation desired condition (DC) (TRPA 2007). Land coverage [impervious cover], on a watershed basis, does not exceed the capability of soil resources to offset the effects of impervious cover. The effects of impervious cover and disturbance are fully mitigated on a storm water zone basis. (TRPA 2007) Up-to-date assessments of impervious cover in LTB are currently needed to determine if the DC indicators – acres and percent of land coverage (hard and soft), by soil type, capability class, and watershed – are in attainment, to inform management decisions and to serve as a baseline for future comparative analyses (Long 2010). These needs are outlined in the proposed “Lake Tahoe Land Cover and Disturbance Monitoring Plan” (hereafter referred to as the LTLCAD Monitoring Plan) (Spatial Informatics Group (SIG) 2009). Impervious cover is composed of hard, soft, and natural features. Hard cover refers to land that is artificially covered by materials such as buildings, pavement, and concrete, and soft cover refers to disturbed and/or degraded soil (Cablk and Perlow 2006, TRPA 2007) Rocky outcrops and peaks are example components of natural impervious cover (Cablk and Perlow 2006). Detecting, mapping, and identifying each subtype of impervious cover and its connectivity is important for evaluating impervious cover impacts to environmental goals and for developing appropriate management strategies. For example, a best management practice (BMP) for reducing runoff from a building (e.g. green roof) may be vastly different than a BMP targeting runoff from a parking lot (e.g. asphalt removal). There is also increasing evidence that effective impervious area (EIA), which consists of impervious surfaces directly connected to a hydrologic network, has a greater impact on runoff than total impervious area (TIA) (Alley and Veehuis 1983, Brabec et al. 2002). A determination of EIA rather than TIA could thus provide a more environmentally powerful assessment of impervious cover. High-resolution impervious surface mapping of the LTB was first carried out in 2002 by Minor and Cablk (2004), which solely characterized a general class of hard impervious surfaces. Pixel-based image analysis techniques combined with GIS data (e.g. road) integration yielded a user’s accuracy (the chance of a given impervious pixel actually being impervious) of 87% and a producer’s accuracy (an estimate of how much of the impervious surfaces were captured) of 97% (Minor and Cablk 2004). Because 13% of the impervious surfaces mapped were not actually impervious surfaces, and those impervious surfaces that were mapped were not properly connected (see Fig. 1), the resulting impervious datasets are suitable for estimating 2002 TIA levels for the LTB as a whole, but not for finescale summaries (e.g. per-parcel imperviousness) or EIA delineation. An additional limitation of the 2002 mapping was that it did not include soft impervious surfaces, nor did it differentiate between hard impervious surface types as has been subsequently recommended by Cablk and Perlow (2006). The shortcomings of the previous work can be traced to the methodology and the type of remotely sensed data used. “Pixel-based” approaches to automated feature extraction only make use of the spectral information in an image and ignore most of the elements of image interpretation. These approaches have been heavily criticized because they yield maps far inferior to those derived using traditional photointerpretation (Olson 2009). In contrast, manual interpretation of remotely-sensed imagery is considered to be the most accurate means to map impervious surfaces (Kampouraki et al. 2008). Because humans are uniquely adept at extracting features, they make use of spectral (tone), geometric (shape, size) and contextual information (site, association, pattern) in an image, collectively referred to as the elements of image interpretation (EII) (Olson 1960). The major drawback to manual interpretation is that it is very time consuming and costly. However, a promising new set of techniques termed Object-Based Image Analysis (OBIA) can automate land-cover mapping. OBIA techniques make use of the EII, automating what trained human imagery analysts can accomplish. Several studies have demonstrated that OBIA techniques are superior to traditional “pixel-based” approaches for impervious surface mapping (Thomas et al. 2003, Finke et al. 2009, Miller et al. 2009), and some have even concluded that the accuracy can approach that of manual interpretation (Kampouraki et al. 2008). Previously, LTB images were derived from “passive” sensors, such as aerial and satellite imaging systems that rely on reflected energy. In forested areas, the ground can be obscured by tree canopies, which can dominate the reflected signal. Again, the human vision system is uniquely adept at detecting objects, such as roads, that are only partially visible (Johnson and Olshausen 2005); however, active sensing technology such as Light Detection and Ranging (LiDAR), in which energy is emitted from the sensor and can be used to detect features that are obscured II-2 Proposal: Tahoe Research Supported by SNPLMA 2010 from above, can be of great assistance in approximating this human ability. Figure 2 provides an example of how LiDAR can augment passive-sensing technology (satellite imagery) to support impervious surface characterization, by emitted energy from LiDAR penetrating the tree canopy and providing an un-obscured view of the main road. Several recent studies have also pointed out the advantages of using the spectral information from high-resolution imagery in combination with the structural information from the LiDAR for a data-fusion approach (Hodgson et al. 2003, Oczipka et al. 2008, Yu et al. 2009). The challenge of this approach lies in in the need for high performance computing to handle the sheer volume of data that must be processed for an area the size of the LTB. There is thus a need to develop a cost-effective and consistent approach for long-term impervious surface monitoring that leverages recently acquired multispectral WorldView-2 (passive) and LiDAR (active) data of the LTB to differentiate impervious surface types. Furthermore, such an approach must provide information that is accurate at a fine scale (i.e. the parcel level) and must ensure that impervious surfaces are properly connected to support EIA identification via hydrologic modeling. To meet this need, we propose building a “fused” map from GIS, multispectral, and LiDAR datasets, while employing OBIA techniques to develop automated routines that precisely extract impervious cover. This approach will overcome limitations of previous mapping efforts that did not differentiate between impervious cover classes or ensure impervious surfaces were properly connected, both of which are vital to management and modeling effort. This will allow us to pilot implement the Lake Tahoe Land Cover and Disturbance Monitoring Plan (SIG 2009) and to compare our proposed method to the previous assessment (i.e., identify strengths and weaknesses between approaches and, if warranted, recommend retrofits to the previous assessment). d. Goals, objectives, and hypotheses to be tested Goals 1. Develop a cost-effective and repeatable approach suitable for the long-term monitoring of impervious surfaces within the LTB that leverages existing investments in remotely sensed imagery, LiDAR, and vector GIS datasets. 2. Generate products that provide decision makers and land managers meaningful information about impervious surfaces at a variety of scales. 3. Produce a GIS dataset of impervious surfaces in the LTB, such that it is accurate for EIA hydrologic modeling (e.g. Subtheme 2b) and realistic to the general public. 4. Pilot implement the LTLCAD Monitoring Plan (SIG 2009). Objectives 1. Map hard, soft, and natural impervious cover within the LTB such that the user’s and producer’s accuracies for both types exceed 95% for the entire study area and are within +/- 10% of the actual amount at the parcel level. 2. Quantify the amount and extent of the various impervious cover types in the LTB by ownership, political, and environmental boundaries, including amount and percentage of impervious cover within each soil capability class on a watershed basis. 3. Refine the proposed LTLCAD Monitoring Plan (SIG 2009) if needed, while monitoring change in hard impervious cover between 2002 and 2010 using a comparative analysis. e. Approach, methodology and location of research Location This project will encompass all lands within the Lake Tahoe Basin Management Unit (LTBMU). Approach Below we have outlined what we see as the key requirements of any approach to impervious surface mapping within the LTB and the corresponding components of our proposed approach that address these requirements. Key Requirements 1. Spatial detail. Impervious surfaces are often narrowly configured and thus require high-resolution mapping to be accurately captured. 2. Impervious cover type. The OBIA system must be capable of differentiating between various types of hard, soft, and natural impervious cover. As spectral characteristics alone will not provide sufficient means for discrimination, textural, geometric, and contextual information must be incorporated. II-3 Proposal: Tahoe Research Supported by SNPLMA 2010 3. Accuracy and quality. The output impervious-cover products must be highly accurate for subsequent modeling and analysis efforts. Another consideration is that the data must represent features on the landscape in a realistic and cartographically pleasing manner. This is especially true for products developed from highresolution data; end-users expect both statistically accurate maps and visual coherence. Particular attention must be paid to ensuring the connectivity of impervious surfaces, because even pixel-wide gaps can have substantial impacts on computing EIA. 4. Efficiency. The size of the study area and spatial resolution of the remotely sensed datasets will require the processing of billions of pixels and hundreds of thousands of vector features. The OBIA system must be capable of ingesting and processing these massive datasets, and it must do so in a way that provides substantial cost savings when compared to traditional methods (e.g., manual interpretation) and without sacrificing any of the above four requirements. 5. Flexibility and repeatability. The approach must be flexible enough to incorporate class definitions, and changes to those definitions based on input by stakeholders. The approach must also be transparent and repeatable, providing a means by which to replicate it in the future. Key Components 1. High-resolution feature extraction. We will extract impervious cover at a minimum mapping unit of 4m2. 2. Object-Based Image Analysis techniques. Manual feature extraction of impervious surfaces for the LTB would be too costly of an endeavor. A pixel-based approach, while cost effective, would fail to produce an impervious dataset that it sufficiently accurate or suitable for EIA identification. To overcome this dilemma, we propose to develop automated routines to extract land cover using OBIA routines. OBIA techniques focus on the application of image segmentation algorithms that group pixels into objects (Baatz and Schape 2000). Like pixels, image objects have spectral properties (mean band values), but unlike pixels they have spatial characteristics (shape, size, texture) and are topologically aware (i.e., each object “knows” its neighbor objects). As with manual interpretation, this permits integration of EII, thus surpassing traditional “pixelbased” approaches for mapping impervious surfaces (e.g. Thomas et al. 2003, Finke et al. 2009, Miller et al. 2009). 3. Data fusion/integration. Significant resources have been invested in the imagery (including WorldView-2), LiDAR, and vector GIS datasets available for the LTB. A system that does not leverage this information will not only fail to produce the most accurate dataset possible, but will also represent an investment loss. Even datasets with known limitations can help guide the classification process when applied appropriately. We will develop an OBIA system capable of ingesting and analyzing raster image, LIDAR point cloud, and GIS vector datasets within a single platform using a common set of algorithms. 4. Expert knowledge. Trained imagery analysts are, in essence, expert systems. In land-cover mapping projects, these analysts produce highly accurate data by visually interpreting features of interest and then drawing boundaries that satisfy specific mapping protocols, typically created using photointerpretation keys. Within the OBIA framework, we will develop an expert system that translates the processes by which a trained imagery analyst would extract features into an automated process, replicating the human analyst’s ability to produce accurate and cartographically-coherent maps. Expert systems are not constrained by the normality assumptions required by statistical algorithms, they are more robust than decision trees, and provide more consistent and repeatable results than machine-learning approaches such as neural networks. This expert system will be built using the Cognition Network Language (CNL). Developed by Nobel Laureate Dr. Gerd Binnig, we believe CNL to be the most advanced programming language for knowledge- and context-based feature extraction. Our CNL-based expert system will facilitate an efficient and precise transfer of rules ensuring both flexibility and repeatability. An example of a CNL expert system, or rule set as it is known, used to extract buildings is presented in Figure 3. 5. Land cover mapping. Implicit in the use of contextual information to identify imperious surfaces using an expert system is the delineation of non-impervious features. As such, the OBIA system will be designed to map land cover “wall-to-wall,” characterizing the entire LTB using the classification typology depicted in Figure 4. 6. Hardware and software. The proposed OBIA system will operate in a grid computing environment that supports parallel processing. By distributing the processing load over multiple computational cores, the system will promote speed and facilitate flexibility. The OBIA system will be built on the eCognition software suite. eCognition is the only software package to incorporate CNL and it provides support for the raster, point cloud, and vector data types in addition running on grid computing architecture. The OBIA system will run on a dedicated server with 96GB of RAM, a 4GB graphics card, and dual quad-core Xeon 3.46GHz Turbo II-4 Proposal: Tahoe Research Supported by SNPLMA 2010 processors (16 total threads). Tape backups will occur nightly and weekly backups will be done to an off-site storage facility. As an example of the above methodology Figure 5 shows anthropogenic hard surface impervious mapping conducted by our group from previous projects and illustrates the advantages of the object-based approach compared to the pixel-based approach used in 2002 (Fig. 1). First, land cover types with similar spectral signatures, such as exposed soil in agricultural fields and rocks and sand near rivers, are not confused with man-made impervious surfaces. Second, the impervious surfaces are connected and thus suitable for EIA modeling. Workflow and Tasks Given the need for brevity in this proposal, we cannot detail every feature of our intended methodology, particularly the OBIA system. However, an online presentation given by one of our team members (O’Neil-Dunne 2009) provides a thorough review of a similar OBIA system that was designed, deployed, and used for a recent highresolution land-cover mapping project. The proposed workflow will consist of four phases (Figs. 6a, 6b). Below is an outline of the methodological approach broken out by task: Task 1. Resource Manager Engagement: The main focus of this task is to identify and confirm that the classification typology meets the needs of resource managers and to identify potential data sources that can be used in the analysis. Confer with resource managers about classification typology illustrated in Figure 4 and refine the typology as required. Confer with resource managers about the approach and potential ancillary data. Task 2. Development of image interpretation keys for all the land cover classes: This task focuses on building photointerpretation keys that will guide the development of the knowledge-based expert system written in CNL and also serve as the basis for making manual corrections. Identify and visit sites within the LTB such that GPS ground control points and photographs are recorded for the full range of land cover classes present in Figure 4. For each land cover class, produce image interpretation keys that describe the properties of each EII along with corresponding WorldView-2 and LiDAR perspectives. Task 3. Develop Input Datasets into “data stacks”: This task focuses on the collection, evaluation, and initial processing of the source datasets and loading them into the OBIA system. Incorporate and organize LiDAR derivative products including surface models, statistical derivatives, vegetation structure derivatives, and intensity derivatives. Incorporate and organize WorldView-2 data products. Incorporate and organize secondary datasets including, but not limited to, transportation networks, hydrography, parcel boundaries, and vegetation characterizations. Task 4. Top-Down OBIA Land Cover Classification: This task serves as a means by which to build the contextual information needed to refine the impervious surface mapping in Task 5. Develop CNL rule sets based on the image interpretation keys developed in Task 2. In principle, rule-set development is a supervised process in which an analyst combines CNL algorithms to achieve a desired classification. Using photointerpretation keys as a reference, a rule set is based on a set of relatively small areas that collectively contain all the features desired in the final classification. Once the rule set has been compiled, it is applied to the entire dataset. Deploy the OBIA system to characterize land cover. Manually review the land cover dataset at a scale of 1:10,000 and make any corrections via on screen digitizing. Task 5. Bottom-Up OBIA Impervious Cover Classification: Here, the focus is on refining the impervious surface characterization generated as part of the land cover classification generated in Task 4 with specific emphasis on (1) detecting impervious surfaces obscured by overhanging tree canopy and (2) ensuring that there are no breaks within connected impervious surfaces. Integrate the high-resolution land-cover data compiled in Task 4 into a secondary OBIA system that takes a bottom-up approach to land cover mapping. Develop rule-set in CNL based on the photointerpretation keys developed in Task 2 and the land cover dataset II-5 Proposal: Tahoe Research Supported by SNPLMA 2010 (following manual corrections) produced in Task 4. Included in the process is an automated routine that finds the ends of hard impervious features to flag them for review during the manual corrections process as they represent potential false breaks in the impervious dataset. Deploy an OBIA parameterized for extracting impervious surfaces. To aid process develop and deploy a CNL rule set. Manually review the impervious cover dataset at a scale of 1:2,500 and make any corrections via on-screen digitizing. Particular attention will be paid to reviewing the flagged “ends” of hard impervious surfaces to ensure that impervious surfaces are connected where it is appropriate. Task 6. Accuracy Assessment: The focus of this task is to compute the accuracy for the impervious surface mapping using point-based and polygon approaches following Congalton and Green (2009). If the impervious datasets does not meet the thresholds set forth in the Goals and Objects, the manual corrections in Task 5 will be repeated and the accuracy reassessed. Generate a stratified sample of 1000 points with a minimum of 50 points per impervious sub-type. For each point two analysts will independently assign a reference class to the point. In those cases where the reference class differs a third analyst will assign a class. If two analysts agree the point is retained, if not, it is excluded. Using the reference points, develop an error matrix with producer’s, user’s, and overall accuracies. Field data collected in task 2 will be used as a control in this process. Randomly select ten parcels from each of the major ownership types (federal, state, county, city, tribal, private). For parcels that are two acres or less, manually digitize and categorize impervious surfaces according to the typology (Fig. 4). For parcels that are two acres or more, a random point within the parcel will be selected and an area within a two acre buffer of the point will be digitized. Compute confidence intervals for each of the impervious surface subtypes by comparing aerial estimates from the reference data for each parcel to those from the classified data. Task 7. Geographic Summarization: This task will serve to quantify the amount of the various impervious surface subtypes, along with hard and soft impervious surfaces within the LTB by ownership, political, and environmental boundaries. Compute summary statistics of impervious cover (percent and area) for parcels, counties, watersheds, soil type, soil capability classes, stream buffer, lake buffer, right-of-ways and other geographies determined by resource managers. Produce associated maps and spreadsheets. Task 8. Implement the Lake Tahoe Land Cover and Disturbance Monitoring Plan: This task will implement the monitoring plan using the impervious surface layer developed in the previous tasks. Collect datasets including soil capability classes, soil layer, watershed boundaries at multiple levels, 2010 impervious surface layer, and parcel boundaries. Determine the amount and percentage of impervious cover within each soil capability class on a watershed basis to specifically address regulatory mandates (see TRPA 2007). Summarize compliance. Repeat analysis using 2002 impervious surface analysis. Task 9. Comparative Analysis: The purpose of this task is to analyze potential trends in impervious surfaces, and address issues of data quality between temporal periods and resolutions. Conduct a comparative analysis of input 2002 and 2010 impervious surface coverage. Document trends in hard impervious cover between 2002 and 2010. Document trends in soft impervious cover between 2002 and 2010. Examine approaches to resolving issues of false change resulting from errors in the 2002 dataset. Task 10. Reporting and Extension of Results: Generate FGDC/ISO compliant metadata for all geospatial products. Produce quarterly reports, a final report and manuscript for submission to a peer-reviewed journal. Conduct in-person and web-based meetings with land managers and regulatory agency representatives. These meetings will be held at the beginning of, during, and upon completion of the project to inform stakeholders of results and applications of end-products (e.g. maps, geospatial data and summary information). II-6 Proposal: Tahoe Research Supported by SNPLMA 2010 f. Relationship of the research to previous and current relevant research, monitoring, and/or environmental improvement efforts To date, some forms of degraded soils and soft cover have been mapped (Tetra Tech 2007), but are not currently monitored in the LTB (SIG 2009); however, researchers previously used a comprehensive approach to analyze highresolution satellite images and found hard cover in 2002 was at or above allowable limits in the most vulnerable land/soil types (TRPA 2007). However, as previously stated, these calculations were based on the satellite images available at the time derived from “passive” remote sensing techniques, potentially leading to underestimates of impervious area observed in forested areas (Tilley and Slonecker 2007). The recent acquisition and availability of Basin-wide LiDAR and WorldView-2 images, in conjunction with our proposed methodology, allows for a current and more precise assessment of both hard and soft cover. In addition, this type of imagery is considered ideal for long-term monitoring and allows for pilot implementation of the LTLCAD Monitoring Plan (SIG 2009). g. Strategy for engaging with managers and obtaining permits This proposal is based on the objectives outlined in the “Lake Tahoe Land Cover and Disturbance Monitoring Plan” (SIG 2009), which are meant to meet regulatory needs specific to the “Soil Conservation” DC indicators. It also includes additional deliverables (e.g. delineation of impervious cover by ownership or management boundaries) that were more recently identified in face-to-face meetings between members of SIG with LTB land managers and representatives from regulatory agencies held this summer. Because impervious cover is of general concern (e.g. stormwater runoff), we propose to continue these meetings and host a series of webinars prior to, during, and upon completion of the project. These meetings will inform our mapping process, provide status updates, and educate decision makers on how to best use the end products. No permits should be needed for this work. h. Description of deliverables/products and plan for how data and products will be reviewed and made available to end users 1. 2. 3. 4. 5. 6. 7. 8. 9. Land Cover Dataset. Although the generation of a comprehensive land cover dataset is not the focus of this proposal, we recognize that the land cover features extracted for the purpose of incorporating contextual information will constitute the most detailed and accurate land cover map for the LTB. The land cover dataset will represent a top-down approach and include all classes in proposed (Fig. 4). The land cover dataset will be distributed in both raster and vector forms and include compete FGDC compliant metadata. Impervious Surface Cover Dataset. The impervious dataset will be distributed in both raster and vector formats and will represent a bottom-up mapping approach in which issues of occlusion (e.g. overhanging tree canopy) are dealt with and connectivity is maintained. Examples of previous impervious mapping products are presented in Figure 5. FGDC compliant metadata will be included. Impervious Summary Statistics. Hard, soft, and natural impervious surface types will be summarized by parcel, right-of-way, town, county, watershed, soil type, soil capability class on a watershed basis and others to be determined by discussions with land managers. The summary statistical tables will be distributed in both GIS and Excel formats. The GIS tables will include a common identifier providing a means by which to link the tables to the corresponding polygon layers and will include FGDC compliant metadata. Change Detection Summary Statistics. The change in hard impervious cover from 2002 to 2010 will be summarized by parcel, right-of-way, town, county, watershed, soil type, and others to be determined by discussions with land managers. CNL Rule Set. The Cognition Network Language (CNL) rule set will be distributed in both its native format (.dcp) and as a text file (.txt). Both files will include process-level documentation providing a means by which to fully review the methodology and replicate the approach in future studies. This file encapsulates the expert knowledge derived from the study. Accuracy Assessment. The accuracy assessment will consist of both the reference points and an error matrix. Report. The final report will provide an overview of the project and include all methods and results. The report will also provide recommendations for impervious cover long-term monitoring based on the results of the pilot change detection and comparative analysis. Manuscript. The final report will be submitted for publication to a peer-reviewed journal increased impact. Presentation. A presentation summarizing the project will be presented to managers either in person or via webinar or both. II-7 Proposal: Tahoe Research Supported by SNPLMA 2010 III. Schedule of Milestones and Deliverables Projects should not expect to begin before June 2011. Note that it is the responsibility of the project proponent to coordinate with appropriate agency representatives or partners and secure any agreements or approvals necessary prior to initiating research. Be sure to include adequate time for submitting draft deliverables for review, responding to reviews, and submitting final deliverables. Milestone/Deliverables Start Date End Date Description Task 1. Resource Manager Engagement: Task 2. Development of image interpretation keys for all the land cover classes Task 3. Develop “Data Stacks” 7/1/2011 8/1/2011 Meeting and summary report 7/1/2011 9/1/2011 Image interpretation key document 8/1/2011 9/1/2011 Status update Task 4. Top-Down Contextual Land Cover OBIA Classification: 9/1/2011 12/1/2011 Summary report and land cover dataset Task 5. Bottom-Up Impervious Cover OBIA Classification: 12/1/2011 2/1/2012 Summary report and draft impervious dataset Task 6. Accuracy Assessment: 2/1/2012 3/1/2012 Summary report and finalized impervious dataset Task 7. Geographic Summarization: 3/1/2012 4/1/2012 Summary report, geographic summary statistics spreadsheet, maps, and GIS data. Task 8. Implement the Lake Tahoe Land Cover and Disturbance Monitoring Plan 4/1/2012 6/1/2012 Summary report of findings and GIS data Task 9. Comparative Analysis: 6/1/2012 8/1/2012 Change detection summary statistics. Task 10. Prepare progress reports Ongoing Ongoing Submit brief progress report to Tahoe Science Program coordinator by the 1st of July, October, January, and April. Task 10. Prepare and submit annual accomplishment report 8/1/2012 9/1/2012 Prepare annual summary of accomplishments in September. Task 10. Coordinate and attend LTB management agency round table to present results TBD TBD Task 10. Prepare final report 9/1/2012 10/1/2012 Complete report in hard and digital copies Task 10. Prepare and submit manuscript 11/1/2012 12/1/2012 Revise final report for manuscript. Submit for peer-review. III-1 Proposal: Tahoe Research Supported by SNPLMA 2010 IV. Literature Cited Alley, W. M., and J. E. Veenhuis. 1983. Effective impervious area in urban runoff modeling. Journal of Hydraulic Engineering 109(2): 313-319. Arnold, C. L., and C. J. Gibbons. 1996. Impervious surface coverage: the emergence of a key environmental indicator. Journal of the American Planning Association 62(2): 243-258. Baatz, M., and A. Schape. 2000. Multiresolution Segmentation: an optimization approach for high quality multiscale image segmentation. Journal of Photogrammetry and Remote Sensing 58(3-4): 12-23. Bailey, R. G. 1974. Land-Capability Classification of the Lake Tahoe Basin, California-Nevada: A Guide for Planning. South Lake Tahoe, CA: US Forest Service, US Department of Agriculture in cooperation with the Tahoe Regional Planning Agency. Brabec, E., S. Schulte, and P. L. Richards. 2002. Impervious surfaces and water quality: a review of current literature and its implications for watershed planning. Journal of Planning Literature 16(4): 499-514. Cablk, M.E., and L.E. Perlow. 2006. A classification system for impervious cover in the Lake Tahoe Basin. Final Report. Reno, NV: Nevada Water Resources Research Institute. Congalton, R. and K. Green. 2009. Assessing the accuracy of remotely sensed data : principles and practices. 2nd ed. Boca Raton, FL: CRC Press/Taylor & Francis. Finke, T., S. Moran, S. Yool, and J. Kennedy. 2009. Object-oriented classification to map impervious surfaces for hydrologic models. In Papers from the Annual Meeting of the Association of American Geographers- 2009. Las Vegas, NV: Association of American Geographers. Hodgson, M. E., J. R. Jensen, J. A. Tullis, K. D. Riordan, and C. M. Archer. 2003. Synergistic use of lidar and color aerial photography for mapping urban parcel imperviousness. Photogrammetric Engineering and Remote Sensing 69(9): 973-980. Kampouraki, M., G. A. Wood, and T. R. Brewer. 2008. Opportunities and limitations of object based image analysis for detecting urban impervious and vegetated surfaces using true-colour aerial photography. In ObjectBased Image Analysis, 555-569. Berlin:Springer. Johnson, J. S., and B. A. Olshausen. 2005. The recognition of partially visible natural objects in the presence and absence of their occluders. Vision Research 45(25-26): 3262-3276. Long, J. 2010. Tahoe Science Update Report. Incline Village, NV: US Department of Agriculture, US Forest Service, Pacific Southwest Research Station. Miller, J. E., S. A. C. Nelson, and G. R. Hess. 2009. An object extraction approach for impervious surface classification with very-high-resolution imagery. The Professional Geographer 61(2): 250-264. Minor, T.B., and M.E. Cablk. 2004. Estimation of impervious cover in the Lake Tahoe Basin using remote sensing and geographic information systems data integration. Journal of the Nevada Water Resources Association 1(1): 58-75. Oczipka, M., T. Bucher, and A. Trosset. 2008. Mapping and updating maps in dense urban regions using high resolution digital airborne imagery, surface models and object-based classification. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 37:551-555 Olson, C.E. 1960. Elements of photographic interpretation common to several sensors. Photogrammetric Engineering 26(4): 651-656. Olson Jr., C. E. 2009. Is 80% accuracy good enough? In Proceedings of the ASPRS 17th Pecora Conference. Denver, CO: American Society for Photogrammetry and Remote Sensing. O'Neil-Dunne, J.P.M. 2009. Mapping the Green Infrastructure. Letters from the SAL. November 22. http://letterssal.blogspot.com/2009/11/mapping-green-infrastructure.html. Spatial Informatics Group (SIG). 2009. Lake Tahoe Land Cover and Disturbance Monitoring Plan. Stateline, NV: Tahoe Regional Planning Agency. IV-1 Proposal: Tahoe Research Supported by SNPLMA 2010 Swift, T. J., J. Perez-Losada, S. G. Schladow, J. E. Reuter, A. D. Jassby, and C. R. Goldman. 2006. Water clarity modeling in Lake Tahoe: Linking suspended matter characteristics to Secchi depth. Aquatic SciencesResearch Across Boundaries 68(1): 1-15. Tahoe Regional Planning Agency (TRPA). 2001. Regional plan for the Lake Tahoe Basin: 2001 Threshold evaluation draft. Stateline, NV. Tahoe Regional Planning Agency. ———. 2007. Threshold Evaluation Report. Stateline, NV. Tahoe Regional Planning Agency. Tetra Tech. 2007. Watershed hydrologic modeling and sediment and nutrient loading estimation for the Lake Tahoe total maximum daily load. Lahontan Regional Water Quality Control Board. http://www.waterboards.ca.gov/lahontan/water_issues/programs/tmdl/lake_tahoe/docs/peer_review/tetra20 07.pdf Thomas, N., C. Hendrix, and R. G. Congalton. 2003. A comparison of urban mapping methods using highresolution digital imagery. Photogrammetric Engineering and Remote Sensing 69(9): 963-972. Tilley, J. S., E. T. Slonecker, 2006. Quantifying the components of impervious surfaces. U.S. Geological Survey. Open-File Report 2006-1008. USGS publications website. http://pubs.usgs.gov/of/2007/1008/ofr20071008.pdf. Yu, B., H. Liu, L. Zhang, and J. Wu. 2009. An object-based two-stage method for a detailed classification of urban landscape components by integrating airborne LiDAR and color infrared image data: A case study of downtown Houston. In Urban Remote Sensing Event, 2009 Joint, 1-8. Shanghai: IEEE. IV-2 Proposal:: Tahoe Researrch Supportedd by SNPLMA 2010 V. Figu ures Figure 1. 2002 impervio ous surface mapping m from Minor and C Cablk (2004). Yellow circlees, which havee been t original graphic, highliight errors off omission. Th he errors resu ult in a discon nnected imperrvious added to the surface un nsuitable for hydrologic h models that compute Effectivee Impervious A Areas (EIA). Figure 2. Comparison n of multispecctral imagery (A) and LiD DAR intensity (B) for a poortion of the T Tahoe F in Califfornia. Tree canopy obscu ures key imperrvious featurees such as harrd and soft roads in National Forest the imagery. In the LiDAR intensity y dataset the main road is clearly visiblle, but other iimpervious feaatures are not weell detected. V-1 Proposal:: Tahoe Researrch Supportedd by SNPLMA 2010 m (rule set) coonstructed witth the Figure 3. Building exttraction via stepwise proceess using an eexpert system nguage (CNL)). Objects gen nerated by a segmentation algorithm ovverlaid on a L LiDAR Cognition Network Lan i (B). A first pass cllassification siingles out tall objects by ap pplying thresh hold to surface model (A) and imagery d on the LiDA AR surface moodel (C). An im mage object (IIOF) fusion rooutine the heightt value for each object based is applied to the tall objjects to createe new objects that better reepresent the sshape of build dings (D). A ssecond m incorporatees geometric and a spectral properties too classify buiilding objects from classificatiion algorithm within thee tall objects (E). ( This algorithm is fuzzzy in that it aassigns a prob bability to eacch building. IIn the final step p building ob bjects that ha ave a lower probability of being buiildings are rrevaluated ussing a classificatiion algorithm m that incorpo orates geometrric and contexxtual informaation to produ uce the final ooutput (F). pology. The vegetation v and d water classiffication are doone for the pu urpose Figure 4. Proposed classification typ a of th he imperviouss surface classsification. Noote: natural soources of providing context to improve the accuracy of impervious cover aree included in the hard and soft classes; h however, this can be amended to characcterize us cover accorrding to regullatory delinea ations (i.e. TR RPA does not include naturral sources in n hard imperviou and soft co over). V-2 Proposal:: Tahoe Researrch Supportedd by SNPLMA 2010 om previous im mpervious surrface mappingg projects for ttwo separate llocations (A and B). Figure 5. Examples fro nstances, use of o contextual information within w an OB BIA system pllayed a key roole in the ability to In both in accurately y map imperv vious surfaces. In (A), land d-cover featurres such as exxposed soil in n agricultural fields and sandy y/rocky areass adjacent to streams werre spectrally aand, in somee cases, geometrically simiilar to imperviou us surfaces. By B incorporatiing a land-cov ver classificattion routine too identify agriculture and w water, subsequen nt proximity functions f werre able to reduce errors off commission. In (B), onlyy true color leeaf-off imagery and a LiDAR were w availablee; by replicatting human ccognitive funcctions in the C Cognition Neetwork Language (CNL), the automated a OB BIA system su uccessfully maapped impervvious surfaces despite the laack of nformation. spectral in V-3 Proposal:: Tahoe Researrch Supportedd by SNPLMA 2010 Figure 6a.. Proposed wo orkflow consissting of four phases. p V-0 Proposal:: Tahoe Researrch Supportedd by SNPLMA 2010 orkflow consissting of four phases. p Figure 6b.. Proposed wo V-1