Effects of Varying Inertial Load on Human Wrist Movement
By
Lauren C. Kai
Submitted to the Department of Mechanical Engineering in
Partial Fulfillment of the Requirements for the Degree of
Bachelor of Science in Mechanical Engineering
at the
Massachusetts Institute of Technology
June 2005
-
i
J
--
MASSACHUSETTS INSTTT
OF TECHNOLOGY
JUN
©()2005 Lauren C. Kai
All rights reserved
0 8 2005
LIBRARIES
The author hereby grants to MIT permission to
reproduce and to distribute publicly paper and electronic
copies of this thesis document in whole or in part.
Signatureof Author..................................................
.........................................
Department of Mechanical Engineering
May 10, 2005
Certifi ed by ....................................................
/~~~,(
.
...
..................
.......
Cr Neville Hogan
Professor of Mec anical Engineering
Professor of Brain and Cognitive Sciences
Thesis Supervisor
Accepted
by..................................
.................... ...............................................
Ernest Cravalho
Professor of Mechanical Engineering
Undergraduate Officer
'fRCHiVES
Effects of Varying Inertial Load on Human Wrist Movement
By
Lauren C. Kai
Submitted to the Department of Mechanical Engineering in
Partial Fulfillment of the Requirements for the Degree of
Bachelor of Science in Mechanical Engineering
ABSTRACT
To study natural wrist movements in human subjects, a magnetic motion sensing system was
employed to document unimpeded motion. Three identical bottles of different weights were
designed as handles to provide a wide range of inertial loads. Subjects executed a series of
horizontal and vertical moves with each bottle at two different speeds. Hypotheses concerning the
effects of increased load on target overshoot, maximum acceleration and speed, and hand tremors
were tested. The frequency content seen in the natural speed trials was found to resemble a normal
distribution. This higher area of frequency content could potentially correlate with the frequency of
hand tremors. After analysis of overshoot, there was found to be no statistical difference in the
percent overshoot of movements by varying the weight of the handles. The data showed that the
highest accelerations and speeds of the empty bottle were faster than those of the medium weight or
the heavy weight bottle. One possible interpretation of this is that human wrist movement is force
limited and there is a maximum acceleration at which humans can move.
Thesis Supervisor: Neville Hogan
Title: Professor of Mechanical Engineering and Brain and Cognitive Sciences
3
4
Acknowledgements
I would like to thank Professor Neville Hogan and Steven Charles for their guidance and
encouragement throughout the year. Professor Hogan has been a great advisor, leading me to
question my assumptions and teaching me how to conduct research properly. Steven has provided
endless hours of patient explanations about theory, Matlab code, and experimental procedures. I am
very grateful that I had the opportunity to work with both of them.
I would also like to thank my parents for their emotional and financial support all these years. You
have given so much to me and I hope I can make you proud one day. To my Popo, thanks for the
advice and the baking lessons. To my sister and brother, thanks for putting up with me. I wish you
both the best of luck in the future. To my friends, thanks for the laughs and the good times. You
are the ones that kept me sane at this institute, and I would not have made it through without you.
5
6
Table of Contents
1
Introduction
.....................................................................................................................
11
2
H ypotheses ......................................................................................................................
13
3
Experim ent ......................................................................................................................
15
3.1 Materials.16
Materials ................................................................................................................................................
Materials163.1
3.1
3.2 Methods ................................................................................................................................................
173.2
17
4
Analysis and Results ........................................................................................................
22
4.1 Movements22
Movements ..........................................................................................................................................
Movements224.1
224.1
4.2 Position, Speed, Acceleration ...........................................................................................................
28
4.3 Hand Tremors ....................................................................................................................................
30
4.4 Percent Overshoot .............................................................................................................................
36
4.5 Maximum Acceleration and Speed .................................................................................
.................37
5
Discussion ........................................................................................................................
40
5.1
Hypothesis
1.......................................................................................................................................
40
5.2
Hypothesis
2 .......................................................................................................................................
41
5.3
Hypothesis
3 .......................................................................................................................................
41
6
Conclusions . ......................................................................................................................
43
7
References .
44
Appendix A: Edi
........................................................................................................................
nburgh
Handedness Inventory ................................................................... 45
Appendix B: Weight Protocol .................................................................................................
46
Appendix C: Original Matlab Code ........................................................................................ 49
Appendix D: Revised Matlab Code ........................................................................................
54
Appendix E: Table of average percent overshoot for each subject ....................................... 57
Appendix F: Tables of maximum speed and acceleration for weight trials .......................... 58
7
8
List of Figures
Figure 1.1 Flexion-extension and adduction-abduction in the wrist .............................................
11
Figure 3.2 Flock of Birds coordinate axes ....................................................................................
15
Figure 3.3 Shampoo bottles of different weights. Last bottle pictured with sensor attached ........ 16
Figure 3.4 Weight comparison of three handles used in trials.......................................................
17
Figure 3.5 Pronation-supination
18
rotation in the wrist ..................................................................
Figure 3.6 Wrist device. (a) Side profile with subjects arm in device. (b) Top view ...................... 18
Figure 3.7 Subject positioned in front of screen during weight experiment ..................................
19
Figure 3.8 Hand positions during zeroing and scaling of Flock of Birds coordinate system .......... 20
Figure 3.9 Computer game display for weight experiment ............................................................
21
Figure 4.1 Movement plots from Subject A..................................................................................
23
Figure 4.2 Movement plots from Subject B..................................................................................
24
Figure 4.3 Movement plots from Subject C..................................................................................
25
Figure 4.4 Movement plots from Subject D .................................................................................
26
Figure 4.5 Movement plots from Subject E .................................................................................
27
Figure 4.6 Position vs. time plots of Subjects A and D with the medium weight handle ............... 28
Figure 4.7 Speed vs. time plots of Subjects A and D with the medium weight handle .................. 29
Figure 4.8 Acceleration vs. time plots of Subjects A and D with the medium weight handle ........ 30
Figure 4.9 Fast Fourier transforms of hand speed from Subject A ...............................................
31
Figure 4.10 Fast Fourier transforms of hand speed from Subject B.
.............................................
32
Figure 4.11 Fast Fourier transforms of hand speed from Subject C.
.............................................
33
Figure 4.12 Fast Fourier transforms of hand speed from Subject D .............................................
Figure 4.13 Fast Fourier transforms of hand speed from Subject E.
34
.............................................
35
Figure 4.14 Definition of overshoot for east horizontal target ......................................................
36
Figure 4.15 Average percent overshoot for subjects moving at natural speed ............................... 36
Figure 4.16 Average percent overshoot for subjects moving at natural speed ............................... 37
Figure 4.17 Maximum accelerations at natural speed according to handle weight ......................... 38
Figure 4.18 Maximum accelerations at fast speed according to handle weight ..............................
Figure 4.19 Maximumnspeeds at natural speed according to handle weight .
9
38
..................................
39
Figure 4.20 Maximum speeds at fast speed according to handle weight ........................................
10
39
1
Introduction
This study aims to document the kinematics of natural wrist movement in healthy subjects using
weight as a variable. It will be conducted with the use of magnetic motion sensing technology to
track the coordinates and angles of rotation through which the wrist moves. The data will be
analyzed and used to answer specific questions concerning the natural wrist movement of healthy
subjects. Differences in position, velocity, and accelerations will be compared among tests with
varied weights. In addition, target overshoot and frequency of hand tremors will be examined.
The Newman Laboratory has developed a wrist rehabilitation robot as a convenient and costeffective physical therapy option for stroke patients. It has been tested on healthy, subjects and
significant data has been collected; however, it was not known whether the robot allows natural,
unimpeded movement. Therefore, a study on the kinematics of natural wrist movement was needed
to characterize the data from studies with the wrist robot. This new data will be used to either
validate the data from the wrist robot or to revise the design of the robot's wrist mechanisms.
The research performed in the Newman Laboratory involves testing healthy subjects on a series of
activities with a wrist robot. One such activity is a game involving eight target points equally spaced
around a circle. The object of the game is to move the robot's handle so that a cursor on a screen
moves from one target to the next, as accurately as possible. The horizontal axis of the screen
exhibits wrist flexion and extension; the vertical axis exhibits adduction and abduction (see Figure
1.1, below).
Abd.d.-
-
"
E--.
f-
.4_aaf,_e
,,,,at/
/.I
Figure
1.1 Flexion-extension and adduction-abduction in the wrist
Figure 1.1 Flexion-extension and adduction-abduction in the wrist'.
11
According to previous research, arm movements in terms of path, final position, and norma/ized
velocity profiles are load independent. However, with increased weight, non-norma/ied velocity
profiles showed that the duration of moves increased and peak velocities decreased; this result was
evident in both forward and upward directions of movement. The subjects in the described study
were also asked to match their movement speed with no load and while holding a weight; they
succeeded in matching their no-load velocity profile in both cases2 . This research shows that
humans are capable of making load-independent movements with respect to speed on command.
Furthermore, velocity profiles produced from the data showed that increased loads caused
movements with lower peak velocities and longer durations.
The objective of this project was to conduct an experiment to examine the effect of different handle
weights on wrist movement of healthy human subjects. This included the creation of the protocol
and the design of materials and equipment necessary to perform the experiment. Following the
collection of data, an analysis of wrist motion in terms of acceleration, speed, hand tremors, and
target overshoot was performed. In addition, familiarity of the Flock of Birds magnetic motion
sensing system was necessary in order to study natural wrist movement.
12
2
Hypotheses
The following hypotheses were proposed concerning the way in which varying loads affect wrist
movement in healthy subjects. The first hypothesis discusses the connection between hand tremors
and handle weights.
Hypothesis
1:
Metric 1:
Metric
Wrist movement with lighter weight bottles results in shakier movements.
Area under Fourier Transform of speed data between 9 and 12 Hz.
1:
The heavier weight bottles have more inertia and, according to several subjects, were easier to
control. Therefore, it seems more likely for the subject's hand to shake more frequently in transit
while holding the lighter bottles. The frequency of hand tremors will be analyzed using fast Fourier
transforms of the speed data; the range was chosen as 9-12 Hz on the basis that hand tremors are
typically around 1 Hz.
The second hypothesis examines the differences in amount of overshoot between the different
handle weights.
Hypothesis
2:
Wrist movement with lighter weight bottles causes more target overshoot.
Calculate percent overshoot and compare mean and maximum overshoot
values for all trials.
Metric 2:
Similar to the previous hypothesis, movements with the lighter handles were thought to have less
control than those with the heavier handles due to lower inertia. Overshoot is often a measure of
control from target to target, so it was hypothesized that subjects would move with more overshoot
when holding lighter handles. The mean and maximum values will be used to compare levels of
overshoot between trials.
The third hypothesis considers how the handle weights affect accelerations and speeds of the wrist
movements.
Hypothesis
Metric 3:
3:
Movements with the heavier weight botdtleshave lower speeds and
accelerations and are longer in duration.
Average the maximum acceleration and maximum speed across all moves for a
trial.
13
Previous studies have shown that arm movements executed with heavier loads have lower peak
velocities and longer movement durations. These conclusions were based on comparisons of
velocity profiles of movements with different weights3 . Therefore, it was hypothesized that the
same would be true for movement speeds and accelerations in natural wrist movement. The data
will be segmented into distinct moves and the maximum speed and acceleration will be found for
each using Matlab; the averages of these maximum values will then be taken.
14
3
Experiment
To perform the experiment, the subject used his/her dominant hand to grasp a handle with a sensor
placed on top (see Figure 3.5). The motion sensor on the handle detected wrist movement and
rotation in six degrees of freedom. The Flock of Birds (Ascension Technology Corporation) DC
magnetic motion-tracking system was used in this study. Because wrist motion was limited to less
than 4 ft., the standard transmitter was sufficient for data collection.
Outputs of X, Y, and Z position coordinates and orientation angles (azimuth, elevation, and roll)
were sent to the computer at a sampling rate of 100 Hz. The system utilized the Y and Z position
outputs (see Figure 3.2) from the sensor to drive the cursor motion seen on the computer screen
during the requested activity. The Flock of Birds system works by measuring motion of a search
coil in a magnetic field within 4 feet from the field generator. According to the manufacturer, the
sensor used is accurate to 1.8 mm RMS in the X, Y, and Z directions and 0.5° RMS in the roll,
azimuth, and elevation orientations. The Flock of Birds system has a static resolution of 0.5 mm at
30.5 cm, and 0.1° at 30.5 cm4 .
A
Z
cx
dY
Figure 3.2 Flock of Birds coordinate axes.
A weight experiment was designed to determine whether the weight of a handle affects wrist
movement during the course of the game. Three handles of varying weights were chosen; all
subjects completed trials with each handle. Five healthy subjects between the ages of 22-30 years
gave informed consent and were tested. MIT's committee on the Use of Humans as Experimental
Subjects approved this study.
15
3.1
Materials
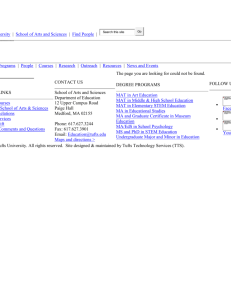
Shampoo bottles (200 mL) were chosen as handles on the basis of their size and shape (see Figure
3.3). The diameter of the bottle around which the thumb closes on the forefinger (1.49 inches) was
near the ideal diameter for men and women's hands (the
50
th percentile of men and women's
comfortable hand holding diameter falls into the range of 1.25 - 1.50 inches5).
Figure 3.3 Shampoo bottles of different weights. Last bottle pictured with sensor attached.
Shampoo was chosen for the contents of the medium weight bottle because its weight was similar to
that of water. Due to its viscous qualities, the contents of the bottle did not move greatly during the
course of the experiments and did not likely interrupt the wrist motion of the subject. Wet sand was
chosen because of its large density difference compared to shampoo. The weights of the
experimental bottles were recorded as follows: the empty bottle was 0.0454 kg, the bottle with
shampoo was 0.2743 kg, and the bottle with wet sand was 0.4926 kg (see Figure 3.4). These weights
included the same interchangeable sensor attached to a cap. For the same volume, the sand was
1.80 times heavier than the shampoo; this increase in weight was very noticeable after holding both
bottles. Compared to the shampoo bottle, the empty bottle was 0.16 times lighter.
16
Weight Comparison of Handles
U.b
A,
0.5
0.4
i 0.3
A
; . C
0.2
0.1
.
a,
0
S.
' ' A:
...
,,
. V
.AD'.'
,
LX '
.''''
.
-'
'....],-.,4,.e>u.,a,
Empty
. A i,@;w
.
'<
.'R;
R
'
.''NoNX@.im'§.A''''
.....
,
<hi
Shampoo
Sand
Handle Type
Figure 3.4 Weight comparison of three handles used in trials.
The maximum testing time for subject appointments, including set up and experiment time, was
approximately one hour. Tests were intended to be long enough to obtain adequate data, but not so
long that subjects would experience fatigue. Therefore, with three experiments to run for the weight
trial (empty, shampoo, and sand bottles), the testing time would be too long if the standard protocol
were followed. For this reason, the number of moves for each segment of the test was cut in half
(from 320 moves to 160 moves) by eliminating moves in the diagonal directions. Although only the
vertical and horizontal movements were tested, they will give a good first review of the differences
in these directions resulting from differing handle weights. However, no conclusions can be made
about wrist movement in the diagonal directions since it was not studied in these trials.
3.2
Methods
Each subject signed a consent form and completed the Edinburgh handedness inventory to
determine which hand was dominant in various activities (see Appendix A). Prior to testing,
subjects were asked about any exceptional wrist characteristics; this was to ensure that no subjects
with previous tendonitis or broken wrists participated in the study because they would exhibit
movement uncharacteristic of a healthy human wrist. The subjects were also asked about corrective
eye devices to make sure that they could see the computer screen clearly.
The adduction/abduction
and flexion/extension axes were marked on the subject's wrist with a pen.
The ulnar side of the third metacarpal was first indicated with a line, on which the center of the
capitate and the pivot point of the wrist were found. Halfway between these two points was the axis
17
of rotation for adduction and abduction6 . The axis of rotation for flexion and extension was
estimated as the middle of the radial side of the wrist.
The subject was positioned in the center of the chair facing straight forward. The experiment was
designed to catalog adduction/abduction
and flexion/extension; therefore, movement of body parts
other than the wrist may have affected the test results, so these parts were restrained. Assuming the
subject's torso was stationary, there were still six degrees of freedom which could cause wrist
movement. The two degrees of freedom related to the shoulder (movement relative to the back and
rotation of the shoulder socket), were constrained with a lap belt and straps restraining both
shoulders. Movement at the elbow was restricted with a Velcro strap wrapped around the subject's
forearm. The wrist apparatus was designed to minimize rotation in the wrist about the pronation
and supination axes (Figure 3.5). Two hard foam pieces and a plastic insert were attached to the
apparatus to discourage rotation in these directions (see Figure 3.6).
Pronationl
Supination
Figure 3.5 Pronation-supination
rotation in the wrist'.
(b)
(a)
Figure 3.6 Wrist device. (a) Side profile with subjects arm in device. (b) Top view.
18
After properly restraining the subject, it was made certain that the subject could navigate through
the entire range of motion. The subject was made comfortable by adjusting the seat height, angle,
and distance from the screen (see Figure 3.7).
Figure 3.7 Subject positioned in front of screen during weight experiment.
Prior to the experiment, further measurements were taken with a second Flock of Birds sensor to
measure the location of the top and bottom of the handle, and the dorsal and ventral projections of
the adduction/abduction
axis. The wrist position was zeroed from above by lining the center of the
forearm (near the elbow), the flexion/extension axis, and the center of the handle in one line (Figure
3.8a). Next, the wrist was zeroed vertically by lining the axis of the forearm (near the elbow), the
adduction/abduction
axis, and the knuckle of the third metacarpal in a horizontal line (Figure 3.8b).
The flexion motion in the game was scaled to 15° with a goniometer; therefore, the full range of
motion in the flexion/extension and adduction/abduction
directions was 30° in total (Figure 3.8c).
The wrist was repositioned after every experiment, but steps were taken to maintain consistent angle
scaling.
19
--
*
-
~-
-
-
-
*g-
'
-
J
-e
handle .
(a) TOP VIEW
ok
w~~w~w~~v
6_w~~t
Act_
Pe
Ev_
~//
(b) SDE VIEW
~~~~~~~~~.
\15c0
~ ~ ~ ~
*s..~
./
(c) SCALE
TOP VIEW
Figure 3.8 Hand positions during zeroing and scaling of Flock of Birds coordinate system.
To ensure uniformity of directions, the rules were explained in the same way to each subject, as
follows: "You will be required to make individual moves from the center to a target and from a
target to the center. Once you have reached a target and are no longer moving, you will have a half
second break, after which you will be prompted for your next move. Please do not move before the
prompt. You will be asked to move at two different speeds: at your natural speed and as fast as
possible. For all speeds, please move from initial to final position in a single step, as accurately as
possible. There will be no talking during sessions, but it is okay during breaks." Noises in the room
were minimized for all tests.
The order of the weights given to each subject was randomized to ensure that fatigue over the
course of the experiment did not cause a false trend in the interpretation of the data. Each bottle
was tested first with the subject moving at his/her natural speed, and then moving as fast as
possible. The test, created by Interactive Motion Technologies (Cambridge, MA)8 and adapted by
Steven K. Charles, consisted of 160 distinct vertical and horizontal moves (see Figure 3.9). 80 of
these moves originated at the center and moved outward, and the remaining 80 moves began
20
outward and moved toward the center of the circle. The order of the four targets was chosen
randomly by the computer, and this same pattern of four directions was repeated for the duration of
the trial with a specific handle weight and at a certain speed. The subjects were given a three-minute
break between trials.
Figure 3.9 Computer game display for weight experiment.
During each trial te Flock of Birds system recorded the X, Y, and Z coordinates, roll, azimuth, and
elevation rotations, and the source and destination target numbers. To properly analyze the wrist
motion of each subject, the data was separated into distinct moves. Based on the starting and
ending target locations (numbered zero through eight) the moves were segmented into different
columns. For example, the movements starting from the center target (zero) and ending at the
north target (one) would be considered one move. All consecutive coordinates with the same
source and destination target numbers were divided into separate columns for further analysis.
21
4
Analysis and Results
The results from each subject were analyzed in terms of position, speed, and acceleration. Evidence
of hand tremors and percent overshoot was also examined in the following sections.
4.1
Movements
The following plots in Figures 4.1-4.5 were gathered from Subjects A, B, C, D, and E, respectively.
Experiments were performed with the lightweight bottle (empty), the medium weight bottle
(shampoo), and the heavy weight bottle (sand) in random orders. Each weight was tested at the
subject's "natural speed" and "as fast as possible." These phrases were open to interpretation, so
the trial data was only compared to other trials executed by the same subject (not compared among
different subjects).
22
Fast Speed
Natural Speed
nfnce
11I
0.04
0.04
0.030 03
0 02
001
0.01
0
(a)
0
(b)
-0.01
-0.01
-0.02
-0.02
-0.03
-0.03
-0.04
-0.04
-0.05
-I I I
l'l
05
0
- .05
O. 5
0.05
0.05 -
0.04
0.04
0.03
0.03
0.02
0.02
0.01
0.01
o
(c)
-0.01
-0.02
-0.02
-0 03
-0.03
-0.04
-0 04
0
-0 05
0.05
15
O.C
0
O0O5
-
0.04
0.04
0.03
0.03
0.02
0 02
0.01
0.01
0
(e)
0.
0
(d)
-0.01
-0.05
-O.E;
-0.0.5
0.05
0
0
(f)
-0.01
-0.01
-0.02
-0.02
-0 03
-0.03
-0.04
.U4
n n,'
- 05
-1 i i
0
0 05
-
.05
-0.05'oe
Figure 4.1 Movement plots from Subject A.
23
0
0.05
Natural Speed
Fast Speed
I 11h
0Nrn
0.05 0.04
0.04
0.03
E
0.02
IE
I
t 111
i
t
I
0.03
0.02
i
0.01
0
(a)
E
_iU.
0.01
-I-I --J |
l-
-0.01
.U
-0.01
-0.02
-0.02
IR
I I
-0.03
-0.03
-004
-0.04
.05o
-0.05
0 .05
-0
x
:::1
0
- nr
~llll71
0. 3~
5
O0.05
I
0
0.05
n -c
-
0..04
0.04
0..03
0.03
0..02
0.02
0.,01
0.01
0
(c)
;2
.:
0
O()
0
(d)
-0..01
-0.01
-0.02
-0.02
-0.03
-0.03
0..04
-0.04
IRMIW
n ti
-0.05
-0.
0. 05
'ZI
-0.05
-O D
-11l
'0.0!
I
I[
0.NA
0.04
0.03
0.03
02
0.02
01
0.01
0
0.05
0
0,05
-0.
4
(e)
0
-0.
-0.01
0
()
-0.01
-0.02
-0.02
-0.
-0. 03
-0.03
04
-0.04
-0.
051
-0.05
n1 'IC
0
0.05
.llll~
-0.05
Figure 4.2 Movement plots from Subject B.
24
Natural Speed
Fast Speed
no
n
U.UO
0.04
0.02
.4
(b)
0
-0 02
-0.04
4
(a
-u . ~
-0 06
0.06
E
(c)
la
_n ns:
-0 04
-0.02
0
0.02
0.04
0.06
n no
i i i
0.04
0.04
0.02
0.02
0
(d)
I
-0. 06
-0.64
-0o02
I
0
0o02
004
o 36
-0.06
-0.06
0.06
0.06
0 04
0.04
0.02
0.02
0
.?_i i
004
0.06
004
0o06
0.04
0.06
L
I
I
-0 02
-0.04
-0 04
-0 06
-0.04
-0.02
-0.04
-0.02
0
k
V
002
0
-C0.02
-0.06
O~~~~~~~~~~~~
0.02
0
-0 02
-0 04
-0.06
(e)
0-
-0.04
-0.02
-0 02
-0 04
q;
-0.06
r
0
002
0.04
0.06
-0.06
-0.06
I
_ii
l
-0 04
Figure 4.3 Movement plots from Subject C.
25
-0.02
0
0.02
Fast Speed
Natural Speed
~O
.4
cU
0.04
0.04
0.03
0.03
0.02
0.02
0.01
0.01
0
(a)
(b)
0
-001
-0.01
-0.02
-0.02
-0.03
-0 03
-0.04
-nl nA
-0.04 -0.03 -0.02 -0.01
0
0.01
0.02
0.03
0 04
-0.04 -0.03 -0.02 -0.01
0
0.03
0.02
0.01
0.04
0.
0.
O0
4
0.
U
(d)
(c)
"0
.E
c)
-0.
la
-0.
-o.
-n
-104
11
11
A
ii i1~
V--i
V, ..
003
|
002 -0.01
0
0.01
0.02
0.03
0.04
0.0O
C
.
w
w
N
w
|
0.03
0.03
0.02
l
I
0.02
f
0.01
0.01
.s
;>
cQ
(e)
0
(f)
-0.01
0
-0.01
V~~~~
-0.02
-0.02
-0.03
-0 03
_n n4
I
I
I
-0.04 -0.03 -0.02 -0,01
I
iI
I
0
0.01
0.02
-n fA
0.03
0.04
v.vGn
-U.U4
I
nns
-U.UJ
I
nno
-U.U2
Figure 4.4 Movement plots from Subject D.
26
I
nn1
-U.UI
[
,
U
I
nn1
U.U I
I
I
nnn
U.Uz
nnz
U.UJ
I
n n-j
U.U4
Fast Speed
Natural Speed
nr
0[05 -
n
U.Ub
0.1
04
0.04
0.1
13
0.03
0.1
02
0.02
0.1
301
0.01
0
(a)
(b)
-001
-0.102
-0.02
-0. 03
-0.03
-0.i304
-0.04
5'
-0105
-0.0
.E
(c)
o*'
0
-0.131
-__.-
0
0
0
-0.05
-0
0..[
0.I
nr,
JahI
I1
0.104
0.04
03
0.1
0.03
302
0.02
01
0.01
-010
(d)
0
-0.1
301
-0.01
32
-0.I
-0.133
-0.02
-0.03
-0.1CA
35
-0.
-0.135
0.1
0.1 A
.3 0.103
I
--
_
0
J
-0.04
-0.05
-0.05
0 05
0 05
0.04
I
_-
0
I~~~~~~
0.1
0.03
O[
:12-
0.02
0
0.1
0.01
(e)
(0
o
01
-0.01
02
-0.02
-0. 03
-01[
-0 04
-0.03
-1A
-o.[
-0.05
-0.04
I
-
0
0 05
-0.05
-0.05
Figure 4.5 Movement plots from Subject E.
27
0
0.05
Position, Speed, Acceleration
4.2
Figure 4.6 is the position vs. time plot of two subjects' data for the first ten seconds of each trial.
Flexion/extension and adduction/abduction
movements are shown on the same axes.
Natural Speed
Fast Speed
¢
.M
(a)
I
(b)
en
:
._
(c)
(d)
V)
0o
Figure 4.6 Position (cm) vs. time (s) plots of Subjects A and D with the medium weight handle.
Flexion/extension data is shown as a solid line, and abduction/adduction data is a dotted line.
Figure 4.7 is the speed vs. time plot of two subjects' data for the first four seconds of each trial.
Speed was found by a backwards differentiation of the position data. A finite impulse response filter
of 10 0 th order with a cutoff frequency of 8 Hz was then applied using the Matlab function "firl ."
Based on wrist robot data from previous studies, 8 Hz is a very high physiological frequency. Since
gross voluntary movements were being studied in this portion of the analysis, anything above a
frequency of 8 Hz was most likely noise.
28
Natural Speed
Fast Speed
11
30
25
20
U
"
(a)
(b)
15
10
S
I
0~
0
Ui.
P
0.5
1
.
1.5
2
2.5
3
-
-
.
3.56
4
30
25
20
U
.V
AB-
(C)
(d)
15
Cl:$
10
5
0
0.5
1
1.5
2
I
25
3
3.5
4
Figure 4.7 Speed (cm/s) vs. time (s) plots of Subjects A and D with the medium weight handle.
Figure 4.8 is the acceleration vs. time plots of two subjects' data during the first four seconds of each
trial. Acceleration values were calculated by the same method mentioned previously involving
backwards differentiation and filtering.
29
U
C.)(a)
Cn
Fast Speed
Speed
Natural Speed
Natural SpeedFast
DU,
---
60U
500
500
400
400
300
1.5
0.5
2
2.5
3
(b)300
3I5
2200
200
100
100
0
0.6
1
.. .
_ .1.5
_
2
_.
2.5
3
0
.
3.5
I
--600
boC
0.5
1
1.5
.
1
.
.
1.5
I
0.5
1
1.5
0.5
.._
.
I
2
_
.
2
,-
-
.5
3
3.5
2.5
_.
.
03
.
3.6
.I
_
2.5
3
3,5
4
500
400
.
(d)
(C)
(c)
,.0
300
200
100
0
2
Figure 4.8 Acceleration (cm/s2 ) vs. time (s) plots of Subjects A and D with the medium weight
handle.
4.3
Hand Tremors
Hypothesis 1 stated that movements with the lighter handles would cause more hand tremors. This
was tested with a metric evaluating the high frequency content of the movements. The unfiltered
speed data was divided into ten equal vectors 20 seconds long and each interpreted by a fast Fourier
transform. The data windows were overlapped and the average of all ten vectors was taken. The
resulting plots of this average vector vs. frequency (Hz) for each subject are shown in Figures 4.9 4.13.
30
Natural Speed
Fast Speed
4. -n
u
3509
(a)
(b)
(c)
(d)
of
E
3
la
-UIJ
35`9
3130
.
230
:
(e)
200
(e
150
100
qkw
',o
&
I
8
9
10
11
12
13
14
Figure 4.9 Fast Fourier transforms of hand speed from Subject A.
31
I
Fast Speed
Natural Speed
41.A
350
300
250
:
(a)
.
(b)
200
150
100
0
0!
.uU
350
300
.C
250
.U
e
._
C)
(d)
(C)
4
14
. __
y:
(
(e
7
8
9
10
11
12
13
14
Figure 4.10 Fast Fourier transforms of hand speed from Subject B.
32
Natural Speed
Fast Speed
Arm
4U
350O
300
250
b)
i3(a)
200
bS
150
.U
100
50
I
n
7
snn
8
9
10
11
I
12
13
14
,
lUU
I
350
300
Y=
E
250
(d)
(C)
20
.t
150
C):
100
y~1
8
9
10
11
12
13
nIJ ..
14
7
I
3
.
9
350
35
300
300
r -n
,..
(e)
10
11
12
13
14
'
4UJ
r~n
20C0
(f
200
190
150
100
100
,0
5O
n
7
u
8
9
10
11
12
13
.t
14
ju
.
n...
-7
l
iiIi
i
8
9
i
10
11
Figure 4.11 Fast Fourier transforms of hand speed from Subject C.
33
12
13
14
Natural Speed
Fast Speed
4U
S
rars
35
30
25
:
(a)
20
(b)
15
10
5
St'"
4UD
350
300
250
(C)
200
(d)
150
100
50
7
8
9
10
11
12
13
14
350 300 250 -
(e)
200 .
(e
150
100
50
n1
II
tJ
7
8
9
10
11
12
13
14
Figure 4.12 Fast Fourier transforms of hand speed from Subject D.
34
Natural Speed
Fast Speed
3
3
4
(b)
1(a)
11
IS0
.,uu
300
250
(d)
150
(C) 100
150SC
;a
U
o
.
.
.
.
.
.
.
.r1j
350
30
250
i)
¢)
if
(e)
3o
200
150
100
(e
-v
50
n
..
.
8
...
I
.
.
I
9
10
11
12
.
.
.
13
.
14
8
9
10
11
Figure 4.13 Fast Fourier transforms of hand speed from Subject E.
35
12
13
14
4.4
Percent Overshoot
Hypothesis 2 stated that more overshoot would be seen in movements with lighter weight bottles.
Overshoot was defined as the distance traveled past the target, as seen below in Figure 4.14. It was
calculated by subtracting the final distance traveled (at the zero velocity position) from the farthest
distance from the original target (the maximum displacement position).
Center
Figure 4.14 Definition of overshoot for east horizontal target.
This equation yielded the amount of overshoot per move; any zero values signified moves without
overshoot. The overshoot distance was divided by the total displacement following completion of
the move to determine the percent overshoot. Displacements perpendicular to the line direction
were not considered. Figures 4.15 and 4.16 show the different values of percent overshoot for each
subject according to the speed directions. The numerical percent overshoot data is presented in
Table 1 (Appendix E).
Average Percent Overshoot
Natural Speed
5.00
*1]~~~~~
4.00
-e--Subject A,
-Subject B
.
- Subject C
3.00
-- Subject D
. . Subject E
2.00
1.00
'-
',_e~
~
|~~~~~~~~~~~~~~~~~~~~~~"
S~~~
0.00
1
~~~~~~~
~
"
,..
Td
2
3
1=empty, 2=shampoo, 3=sand
4
Figure 4.15 Average percent overshoot for subjects moving at natural speed.
36
Average Percent Overshoot
Fast Speed
-I:3.UU
o 20.00
a)
o
15.00
C)
O 10.00
a)
>
5.00
0.00
2
3
1 =empty, 2=shampoo,
4
3=sand
Figure 4.16 Average percent overshoot for subjects moving at natural speed.
4.5
Maximum Acceleration and Speed
Hypothesis 3 stated that movements with the heavier handles would cause movements of longer
dlurations and lower speeds and accelerations. These final assumptions were analyzed using Matlab
to produce velocity and acceleration plots from the position data. The position data was
manipulated by the same backwards differentiation as before to produce velocity and acceleration
plots for each move. A low-pass filter was then applied to eliminate data with a frequency above a
cutoff frequency of 8 Hz; data above 8 Hz was assumed to be noise because those frequencies are
too high to represent the gross voluntary movements analyzed in this portion of the study.
Acceleration and speed conclusions could have been inferred from movement duration lengths,
assuming that a longer move would result from a slower speed and lower accelerations. However,
this method would not account for time lapsed if a subject overshot the target or made extraneous
motions before the move was completed. Therefore, the assumption that time is directly related to
speed and acceleration of a move is not always correct. Consequently, the position data was
analyzed with backwards differentiation and a filter to yield velocity and acceleration information for
each move.
The data was separated into individual moves and the maximum velocity and maximum acceleration
were found for each. The average of the maximum values was taken and the numerical results are
37
presented in Tables 2 and 3 (see Appendix F). Figures 4.17 and 4.18 show a comparison of the
maximum accelerations obtained according to handle weight with subjects moving at their natural
speed and as fast as possible, respectively.
Comparison of Maximum Accelerations at Natural Speed
250
.
Q
200
W
* SubjectA
U 150
g1Subject B
IDSubject C
0
U
SubjectD
* SubjectE
50
¢
Light Weight
Medium Weight
Heavy Weight
Handle Type
Figure 4.17 Maximum accelerations at natural speed according to handle weight.
Comparison of Maximum Accelerations at Fast Speed
7UU
<
600
0
a-''500
Coo
Subject A
SubjectB
MSubjectC
MSubjectD
* SubjectE
" 400
.
300
I.,
~' 200
.¢ 100
0
-
Light Weight
Medium Weight
Heavy Weight
Handle Type
Figure 4.18 Maximum accelerations at fast speed according to handle weight.
Figures 4.19 and 4.20 show a comparison of the maximum speeds obtained according to handle
weight with subjects moving at their natural speed and as fast as possible, respectively.
38
Comparison of Maximum Speeds at Natural Speed
20
16
A
* SubjectA
E Subject B
-1
El Subject C
* SubjectD
ci:~~~~~~~~~~~~~~~~~
*~~~~~~~
Subject E
4
0
Light Weight
Medium Weight
Heavy Weight
Handle Type
Figure 4.19 Maximum speeds at natural speed according to handle weight.
Figure 4.20 Maximum speeds at fast speed according to handle weight.
The averages of the maximum accelerations and speeds were calculated and compared across trials
using a Student's T-test. As expected, when directed to move "as fast as possible," the subjects
moved statistically faster than they did with their natural speed (p<<0.0 5 , Student's paired t-test).
The average maximum speeds and accelerations of the lightweight (empty) and medium weight
(shampoo) bottles for the fast speed trials were found to be statistically significantly different
(p<0.05, Student's, paired t-test). The values for the light weight and heavy weight bottle (filled with
sand) were also found to be statistically different (p<0.05, Student's paired t-test). Although there
were noticeable differences between the data from the medium weight and heavy weight bottles, the
two data sets were not found to be statistically different (p>0.05, Student's paired t-test).
39
5
Discussion
The obvious observation from the position plots is that subjects moved in relatively straight lines
from one target to the next. Each subject made largely similar movements when comparing plots
for the different weights, and there were no striking differences between the plots. Another
observation was that the subjects, on occasion, were extremely precise at the beginning and end of
the move as seen in the tightly packed lines at the center and at each target. However, there were
some instances that the subject had lateral deviations between the two targets; this appears in the
position plots as a slight curve between the two target points. Figure 4.3e in the east and west
directions and Figure 4.2c in all directions are examples of this behavior.
Subject A showed a marked difference between the natural and fast speeds for each weight. As seen
in Figure 11, wrist movement at fast speed was less precise (the moves are more spread out) and
contained fewer lateral deviations than movements at the natural speed. Besides this, the subject
tended to overshoot the target at the faster speed, seen in the figure as the sharp turns at the end of
each move. At lower speeds the subject's hand was more in control and thus did not overshoot the
target. However, the shaking in the wrist was more apparent at low speeds and can be seen in the
movement plots. Subject B and C did not show large variability between the experiments at fast
speeds and those at natural speeds.
5.1
Hypothesis
1
The first hypothesis concerning the movements associated with bottles of differing weights was that
the lighter weight bottle would cause shakier movements in the subject. Based on the FFT plots
seen in Figures 4.9-4.13, some interesting observations were made. The frequency content
generated in the fast speed trials is fairly evenly spread out over 0-10 Hz, while that of the natural
speed trials more closely resembles a normal distribution. Also, there is greater frequency content in
the natural speed plots from 9-12 Hz is higher than that at less than 9 Hz or greater than 12 Hz.
The frequency content trends suggest that there is a greater amount of frequency content between 912 Hz in the natural speed trials. Hand tremors are typically around 10 Hz, so these findings suggest
that tremors were more prevalent in movements executed at natural speed. However, it is not
40
known whether these tremors are dependent on handle weight or movement speed so further
investigation should be performed.
5.2
Hypothesis
2
The second hypothesis was that the lighter bottles would cause the subjects to overshoot more than
with the heavier bottles. An explanation for this was that the heavier weight bottles would cause
more inertia; therefore the bottle with sand, approximately ten times heavier than the empty bottle,
would be more difficult to stop at fast speeds and the subjects would overshoot the target more
often with the heavy bottle.
Based on the average percent overshoot values for each subject, no apparent trends were seen
between the weight of the handle used and the amount of overshoot from the target. Although
trends were seen within each subject (i.e. with increased handle weight, the percent overshoot also
increased), these trends are not applicable across all subjects. In fact, some subjects showed the
exact opposite trend in their data; therefore, no conclusive statements can be made regarding the
relationship between percent overshoot and handle weight for this test.
However, there was an apparent trend between the movement speed and the percent overshoot.
The subjects were directed to move at their natural speed, and to move "as fast as possible" in the
next trial. Therefore, the percent overshoot was statistically significantly greater for fast motions
compared to the natural speed movements.
5.3
Hypothesis
3
The third hypothesis was that movements with the heavier bottles would have lower speeds and
accelerations, and they would be longer in duration than movements with lighter bottles. Assuming
the torque in each trial is constant, the equation,
= Ia, shows that moment of inertia and angular
acceleration are inversely proportional. Therefore, as the moment of inertia increases due to an
increase in load, angular acceleration decreases. This theory matches the observed experimental
behavior that heavier handle weights resulted in lower accelerations. The corresponding decrease in
average maximum speeds seen with a load increase also followed previous conclusions made in
Bock's study of human arm movements. 9
41
Based on the t-tests performed, the maximum speeds and accelerations reached with the light weight
(empty) bottle were statistically significantly higher than with the medium weight (shampoo) bottle.
The maximum speeds and accelerations for the light weight bottle were also significantly greater
than those reached with the heavy bottle (filled with sand). The lack of statistical significance with
other comparisons may be due to the small number of subjects, or it may be because the movements
are actually similar. More subjects should be tested in the future to determine which the case is.
This suggests that hand motion may be force limited. When moving "as fast as possible" as the
instructions stated, the limiting factor seemed to be the force applied by the muscle. If this is true,
according to the equation F= mass*acceleration, there would be a maximum acceleration attainable
by the human wrist with a given weight. This could explain why the maximum speeds and
accelerations for the heavier bottles were statistically lower than those of the empty bottle.
42
6
Conclusions
The frequency content seen in the natural speed trials in the range of 9-12 Hz was found to be
higher than neighboring frequencies for all three handle loads. This higher area of frequency
content could potentially correlate with the frequency of hand tremors, typically around 10 Hz, but
further investigation is needed to make a conclusive statement. As for target overshoot seen in the
trials, there was no statistical difference in the percent overshoot values found by varying the weight
of the handles. However, the percent overshoot was found to increase when speed of motion was
increased, as expected. The data showed that the highest accelerations and speeds of the light
weight (empty) bottle were faster than those of the medium weight (shampoo) or the heavy weight
(sand) bottle. One possible interpretation of this is that human wrist movement is force limited and
there is a maximum acceleration (and consequently a maximum speed for a specified time) at which
humans can move. More subjects should be tested in the future to obtain statistically significant ttests and draw appropriate conclusions.
43
7
References
1
Williams, Dustin. A Robotfor Wrist Rehabilitation.Massachusetts Institute of Technology,
B.S. Mechanical Engineering Thesis, 2001.
2
Bock, Otmar. Load compensation in human goal-directed arm movements. Behavioural
Brain Research,41 (1990): 167-177.
3
Ibid.
4
Ascension Technology
Corporation.
Ascension Products - Flock of Birds. Retrieved May 4,
2005, from http://www.ascension-tech.com/products/flockofbirds.php.
5
Williams, Dustin. A Robotfor Wrist Rehabilitation.Massachusetts Institute of Technology,
B.S. Mechanical Engineering Thesis, 2001.
6
An, K., Berger, R., Cooney, W. Biomechanics
of the WristJoint. New York: Springer-Verlag,
1990, p. 42.
7
Williams, Dustin. A Robotfor Wrist Rehabilitation.Massachusetts Institute of Technology,
B.S. Mechanical Engineering Thesis, 2001.
8
Interactive Motion Technologies. Cambridge, MA. http://interactive-motion.com/.
9
Bock, Otmar. Load compensation in human goal-directed arm movements. Behavioural
Brain Research,41 (1990): 167-177.
10 Written by Steven K. Charles. Massachusetts Institute of Technology; Cambridge, MA.
April 2005.
44
Appendix A: Edinburgh Handedness Inventory
112n
R. C, Out,)FIEtln
APPEN.)DX
I
Af, al Rcct h C:ird Spe:.
'h &Confetitca;o Unit
F'DBI 'BURCH
I L4DFT)EYNS$'
.Kul 1:l;lv.
,
,,,
........
lft:
IA VEN 10R )'
....{}iV'enNam',.s
of lIrLh ......................
Sex
Peuase indtcat yur prctereoces;in he e o h;ands m he rM;lwing activicr- t'x p;lvt.'ing + n~ .t'
,
ileiunt,
exet the preference is so strong tha.t you wolt, nercrr try to e the ther bandt
unle,s a5o$uiely .forced to, put + . 'ITin any case you are rauily indifterent pu + i oh otunt.,
Sme !f the activities require both hands. In scas
thse pat
tl
pm of the tas. o; ohict, for hich han
preference i; wanted is indicated in brackcts.
Please try to answer all the questions, and oly cavca blank if you hae no experiencc at all of thet
onject or isk.k
tr).-)p'
LEFT
L
I
Writing
Drawing
Throwing
4
j
SCs;ors
Toofbrush
C,
Knife (without
7
Spoon
g
Broom ('tpper hand
9
Stiking
10
ork)
:
Match (awth)
Opening box (lid)
Which fool do 'oit prefer to kick with'?
Wiii
tch ee do you use whenr using onN o.e.
QL
4L
eUlavtcs
csb....
M'ARCH 19:0
45
.
i
DECIL.
RIGHI
Appendix B: Weight Protocol
Weight Protocol Checklist 1.0
Setup
E1 Previous position file has been saved
El Rename files to .steven
o rename crob crob.steven crob
o cd lgames
o rename clock clock.steven clock
Subject Information
El Name:
El Date:
El
Time:
E1 Sex:
E1Date of Birth:
1ElConsent form signed
E Edinburgh inventory performed (handedness:
)
1ElSubject wearing glasses/contacts if necessary
E Any exceptional wrist characteristics (ever broken wrist, tendonitis, etc.)? If yes,
Positioning
E
El
El
E
El
[
El
El
Adduction/abduction and flexion/extension axes located and marked
o Make line down ulnar side of third metacarpal by finding three points and
connecting
o Find beginning of joint on 3 rd metacarpal. Approximately 1.4 cm below that is
center of capitate for men and 1.2 cm for women
o Find pivot point in wrist
o Draw mark opposite pivot point on other side of wrist (middle of crease)
o Draw mark halfway between pivot point and capitate center falling on line near third
metacarpal
Draw line on third metacarpal and middle of wrist (radius side) for calibration
Sitting in center of chair, facing straight forward
Shoulder belt fastened and tightened
Constrained near elbow and at wrist (with anti-pronation/supination plastic insert)
Strap down sensor cord to prevent movement impedance
Subject can comfortably navigate entire range of motion
Comfortable height and distance from screen
46
L Chair at right angular position and locked in place
El Screen position adjusted (and move metal bar out of the way)
I Subject comfortable
Recording Position
El [crob]./display to open position application
[El load, run, log
El Using a second FOB sciJsor, record (subject should not move between measurements):
o top, of handle
o
bottom of handle
o
o
dorsal projection of a/a axis
ventral projection of a/a axis
Calibration
El Wrist in neutral position and position reading zeroed
o Start clock game, run modules (open game, click run)
o Manually open terminal
o su
o cd crob
o
./shm
o
s fobzero_pos
1
l Wrist centered then scaled to 15° flexion (measure with goniometer), calibration constant set
o
s fob_calibpos
1
E1 Subject has easy access to all targets
Overview
E-1 Explain rules
o You will be required to make individual moves from the center to a target and from
a target to the center
o Once you have reached a target and or no longer moving, you will have a half second
break, after which you will be prompted for your next move. Please do not move
before the prompt.
o You willbe asked to move at two different speeds:
*
o
o
move at your natural speed
* move as fast as possible
For all speeds, please move from initial to final position in a single step, as accurately
as possible
There will be no talking during sessions, but it is okay during breaks.
E1 Ask if there are any questions/comments:
47
Environment
El Doors closed with signs
[El Jerry has been notified, Jerry's curtain drawn
El Other noises in room minimized
Record movements
F1I Test
20 sec
1El Experiment
1
"Move at your natural speed"
"Move as fast as possible"
Break
El Experiment
-6 min
-4 min
-3 min
2
"Move at your natural speed"
"Move as fast as possible"
Break
El Experiment
-6 min
-4 min
-3 min
3
"Move at your natural speed"
"Move as fast as possible"
El Cleanup
-6 min
-4 min
-3 min
Debriefing
E Ask if there are any questions or comments
Wrap-up
El Rename files as they were
o
o
o
rename crob.steven crob crob.steven
cd lgames
rename clock.steven clock clock.steven
1ElSave position file
48
Appendix C: Original Matlab Code 0
function fob_analysis(mat)
% BRIEF DESCRIPTION
% This
function
takes a data set of two position
coordinates
vs. time and
% computes filtered speed and acceleration, segments into individual moves,
% and computes metrics
% SKC April 2005
% INPUTS
% mat = matrix of four columns:
1. position in first coordinate
%
2. position in second coordinate
%
3. from_target
%
%
%
%
%
%
%
%
4. totarget
OVERVIEW
1. Compute
2. Compute
3. Segment
4. Analyze
5. Analyze
6. Analyze
magnitude of filtered velocity (i.e. filtered speed)
magnitude of filtered acceleration
into individual moves
position
speed
acceleration
% 1. COMPUTE FILTERED SPEED
[fvel,fspeed]
= diffandfilter(100,8,mat(:,l:2));
% 2. COMPUTE FILTERED ACCELERATION
% facc = filtered acceleration in each coordinate (analogous to fvel)
% faccel = magnitude of filtered acceleration
[facc,faccel] = diffandfilter(100,8,fvel);
% 3. SEGMENT
segfe
=
segaa
=
segfspeed =
segfaccel =
(analogous
to fspeed)
DATA SET INTO INDIVIDUAL MOVES
segmentdirections([mat(:,l), mat(:,3:4)]);
segmentdirections([mat(:,2), mat(:,3:4)]);
segmentdirections([fspeed, mat(:,3:4)]);
segment directions([faccel, mat(:,3:4)]);
% 4. ANALYZE POSITION
% Compute overshoot and percent overshoot
os mat = compute_overshoot(segfe,
k = find(-isnan(os mat(5,:)));
seg_aa);
% Compute and output average, standard deviation, median, maximum, and
% minimum values of the percent overshoot
ave perc_os = mean(os_mat(5,k))
std perc os = std(os mat(5,k))
med_perc_os = median(os_mat(5,k))
max_perc_os = max(os_mat(5,k))
minperc
os = min(osmat(5,k))
49
function overshootmatrix
%
%
%
%
%
%
= computeovershoot(seg_fe,
seg_aa)
BRIEF DESCRIPTION
This function takes segmented fe and aa data and returns the
overshoot (and percent overshoot), where overshoot is defined for each
move as the difference between the maximum displacement and the final
displacement.
Displacements perpendicular to the line direction are not considered.
% INPUTS
% seg_fe =
%
% segaa =
%
matrix of fe-position data where each column is an individual
move
matrix of aa-position data where each column is an individual
move
% OUTPUT
% overshoot matrix = matrix with 5 rows and a column for each move. The
columns
% are 1)-3) movement number, fromtarget, totarget; 4) overshoot, 5)
% percent overshoot
% OVERVIEW
% For each move,
%
1. Disregard
%
%
%
2. Isolate the relevant coordinate
3. Convert IN moves to OUT moves for processing with other OUT moves
4. Compute overshoot and percent overshoot
%
5. Store in a matrix
if it's a waiting
period.
If not,
numcol = length(seg_fe(1,:));
num row = length(seg_fe(:,l));
overshootmatrix = NaN(5,numcol);
% Loop through all the columns of seg_fe and segaa
for i =
:num col
if (segfe(2,i) == segfe(3,i))
continue
elseif (max(abs(seg fe(4:numrow,i))) > max(abs(segaa(4:numrow,i))))
displ = abs(segfe(4:num row,i) - seg_fe(4,i));
else
displ = abs(seg_aa(4:num row,i) - segaa(4,i));
end
displ(find(isnan(displ)))
=
[];
final displ = displ(length(displ));
overshoot = max(displ) - final displ;
perc overshoot = 100*(overshoot/finaldispl);
if(percovershoot>3000)
i
end
overshoot matrix(:,i) = [segfe(1:3,i);
end
50
overshoot; percovershoot];
function [fmat dot,fmag] = diff and filter(N,wn,mat)
% INPUTS
% N = filter order
% wn = cutoff
frequency
(in Hz)
% mat = matrix with two columns corresponding to two orthogonal directions
% OUTPUTS
% fmat dot = differentiated and filtered mat
% fmag = magnitude of fmatdot
% OVERVIEW
% 1. Differentiate the columns of mat separately using simple backward
% differentiation to get matdot
% 2. Filter matdclot to get fmatdot
% 3. Compute magnitude fmag of fmat dot via Pythagoras
% 1. DIFFERENTIATE MAT
% Compute mat next as mat at time t+l
mat next = mat;
mat next(1,:)
[];
mat next (length (mat next)+l,:)
= matnext(length(matnext),:);
% Compute backward derivative (Sampling frequency = 100Hz)
mat dDt = (mat next - mat)
* 100;
% Compute unfiltered mag
% mag = sqrt(mat_dot(:,l).^2 + mat_dot(:,2).^2);
% 2. FILTER MAT DOT
% Compute firl filter of order N and cut-off frequency wn (in Hz)
B=firl (N,wn/50);
fmatdot
= [filtfilt(B,1,mat_dot(:,l)) filtfilt(B,1,mat_dot(:,2))];
% 3. COMPUTE FMAG
fmag = sqr(fmat dot(:,l).^2 + fmat dot(:,2).^2);
51
function SEGMAG
%
%
%
%
%
= segment_directions(mag)
BRIEF DESCRIPTION
This function takes a continuous data set, divides the set into
individual moves, and stores each move in a separate column of the output
matrix.
SKC April 2005
% INPUT
% mag = matrix with columns:
%
1. vector of magnitude of position or its derivatives
%
2. vector
%
3. vector of target the subject is heading toward
of target
%
Center
= 0,
N =
the subject
1, NE
= 2,
E =
just left
3,
...
% OUTPUT
% segmag = matrix with as many columns as mag has moves and fixed number
% of rows large enough to fully contain the longest move.
% For each move, the first three rows of segmag are move num, from_target,
% and to_target.
The remaining
rows are the values
of mag(:,1)
for that
% move.
% OVERVIEW
% Go through each row i of mag. If fromtarget and to_target are unchanged,
% add mag(i,1) to column move_num (row j+3) of seg_mag.
% If fromtarget and/or to_target has changed, increment movenum, update
from_target and totarget, and add
% mag(i,1) to column movenum
(row j+3) of seg_mag
% INITIALIZE
segmag = NaN(500,1000);
from_target=mag(1,2);
to_target=mag(1,3);
move_num=l;
% matrix of segmented moves
% i
% i = row number
in mag
j=1;
% row number in segmag
% Fill the first three rows of seg_mag
seg mag(l:3,1) = [movenum; fromtarget; totarget];
% GO THROUGH DATA SET ONE BY ONE
for i=l:length(mag)
if(mag(i,2)==fromtarget& mag(i,3)==to_target)
segmag(j+3,movenum)
= mag(i,l);
else
% increment move num and update fromtarget
move num = movenum + 1;
fromtarget = mag(i,2);
totarget = mag(i,3);
and totarget
% fill in the first four rows of this new column
j
= 1;
segmag(1:3,movenum)
seg mag(j+3,move
= [move_num; from_target; totarget];
num) = mag(i,1);
end
j = j + 1;
end
% CLEANUP
52
% Remove empty columns of segmag
k = find(isnan(seg_mag(l,:)));
segmag(:,k)
= [];
SEGMAG = segmag;
return
53
Appendix D: Revised Matlab Code
function fob_analysis(mat)
%
%
%
%
%
BRIEF DESCRIPTION
This function takes a data set of two position coordinates vs. time and
computes filtered speed and acceleration, segments into individual moves,
and computes metrics
SKC April 2005
% INPUTS
% mat = matrix
of four columns:
%
%
%
1. position in first coordinate
2. position in second coordinate
3. from target
%
4. totarget
%
%
%
%
%
%
%
OVERVIEW
1. Compute
2. Compute
3. Segment
4. Analyze
5. Analyze
6. Analyze
magnitude of filtered velocity (i.e. filtered speed)
magnitude of filtered acceleration
into individual moves
position
speed
acceleration
% 1. COMPUTE FILTERED SPEED
[fvel,fspeed]
= diffandfilter(100,8,mat(:,l:2));
%[fvel,fspeed] = diffandfilter(100,35,mat(:,l:2));
% 2. COMPUTE FILTERED ACCELERATION
% facc = filtered acceleration in each coordinate (analogous to fvel)
% faccel = magnitude
of filtered
acceleration
(analogous
to fspeed)
[facc,faccel] = diff and filter(100,8,fvel);
% 3. SEGMENT
segfe
=
seg aa
=
seg_fspeed =
segfaccel =
DATA SET INTO INDIVIDUAL MOVES
segment directions([mat(:,l), mat(:,3:4)]);
segment_directions([mat(:,2), mat(:,3:4)]);
segment_directions([fspeed, mat(:,3:4)]);
segment directions([faccel, mat(:,3:4)]);
%fft2(segfe(4:end,:))
%plot(segfe(4:end,1:10),segaa(4:end,1:10))
%plot(segfspeed(4:end,:))
% 4. ANALYZE POSITION
% Compute overshoot and percent overshoot
os_mat = computeovershoot(seg_fe, segaa);
k = find(-isnan(osmat(5,:)));
% Compute and output average, standard deviation, median, maximum, and
% minimum values of the percent overshoot
aveperc_os = mean(os_mat(5,k))
stdpercos
= std(osmat(5,k))
med_perc_os = median(os_mat(5,k))
maxperc_os = max(os_mat(5,k))
54
= rr.in(osmat(5,k))
min_perc_os
%5 ANALYZE SPEED
j = find(-seg_fspeed(2,:)==seg_fspeed(3,:));
maxspdmatrix= [max(segfspeed(4:end,
j) ) ];
avemax_speed
= mean(maxspdmatrix);
avemin_speed
= mean([min(seg_fspeed(4:end,j)
) ] );
%6 ANALYZE ACCELERATION
maxaccmatrix = [max(seg_faccel(4:end,j)) ];
ave maxaccel = mean(maxaccmatrix);
ave_minaccel
= mean([min(seg_faccel(4:end,j)
) ] );
FAST FOURIER TRANSFORMS
%Separates fspeed data (filtered with a cutoff frequency of 35 Hz) into ten
%different vectors, each with 2000 data points.
%'7
%G is a vector
representing
frequency,
from 0 to 50 Hz
%The average is taken of these ten vectors and plotted as FFT data vs.
%frequency
n = length (mat(:,l));
one = ([fspeed(l:2000)]);
fone = fft(one);
fone
abs (fone);
two = ([fspeed(2001:4000)
]);
ftwo = fft(two);
ftwo = abs (ftwo)
three = ([fspeed(4001:6000) ]);
fthree
= fft (three);
fthree
abs(fthree);
four = ([fspeed(6001:8000)
]);
ffour = fft(four);
f four = abs(ff ur);
five = ([fspeed(8001:10000)]);
ffive = fft(five);
ffive = abs(ffive);
six = ([fspeed(10001:12000)]);
fsix = fft(six);
fsix = abs(fsix);
seven = ([fspeed(12001:14000)]);
fseven = fft(seven);
fseven = abs(fseven);
eight = ([fspeed(14001:16000)]);
feight = fft(eight);
feight = abs(feight);
nine = ([fspeed(16001:18000)]);
f n ine = f f t (nine);
fnine = abs(fnine);
55
ten = ([fspeed(18001:20000)]);
ften = fft(ten);
ften = abs(ften);
G
= 0:0.05:49.95;
G =G';
vector
=
[];
for i=1:2000
sum = fone(i) + ftwo(i) + fthree(i) + ffour(i) + ffive(i) + fsix(i) +
fseven(i) + feight(i) + fnine(i) + ften(i);
avg = sum/10;
vector = [vector
avg];
i = i + 1;
end
vector(1001:2000)=
[];
%plot(G,vector,'LineWidth',2)
%axis([7
14 0 400]);
%8 POSITION PLOT
%plots
position
vs. time
for the fi.rst two minutes
of the trial with
%data shown in blue and a/a data shiown in black dots
t= 0:0.01:((n-1)/100);
t =t';
plot(t,mat(:,l),'LineWidth',2)
hold on
plot(t,mat(:,2),'k:','LineWidth',2)
hold off
axis([0
10 -4.5 4.5]);
%9 SPEED PLOT
%plots speed vs. time for the first
10 seconds
of the trial
plot(t,fspeed,'LineWidth',2)
axis([0
4 0 35]);
%10 ACCELERATION PLOT
%plots
acceleration
vs. time for the first
plot(t,faccel,'LineWidth',2)
axis([0
4 0 600]);
56
10 seconds
of the trial
f/e
Appendix E: Table of average percent overshoot for each subject
Table 1: Average percent overshoot according to bottle weight and movement speed
Speed
Light Weight
Medium Weight
Heavy Weight
Subjec ANatural
Subject A
_
Subjec
A
Fast
0.62
12.31
0.78
9.91
1.04
20.04
Subject B
Subject B
_
Natural
0.76
0.53
1.11
Fast
4.48
29.02
2.40
Subject C
_
Natural
0.93
0.65
1.33
Fast
1.81
1.97
1.93
_
Natural
Fast
2.40
5.53
1.48
6.62
1.22
5.34
Subject
E
_
Natural
Fast
Fast
4.23
5.46
5.46
3.61
3.54
6. 29
Subject D
E6.29 _
57
Appendix F: Tables of maximum speed and acceleration for weight trials
Table 2: Average maximum acceleration (cm/sec2 ) according to bottle weight and movement speed
Subject A
SubjectB
Subject
C
Subject
D
Subject E
Subjec E
Speed
Light Weight
Medium Weight
Heavy Weight
Natural
112.86
119.60
103.91
Fast
Natural
Fast
625.19
171.40
466.18
516.02
141.22
275.54
554.71
165.73
301.94
Natural
178.81
128.80
124.56
Fast
244.52
145.53
199.53
Natural
137.37
137.73
Fast
312.86
281.07
200.81
Natural
245.70
216.91
238.21
Fast
409.90
345.95
303.25
107.31
Table 3: Average maximum speed (cm/sec) according to bottle weight and movement speed
Speed
Light Weight
Medium Weight
Heavy Weight
Natural
Fast
9.24
35.47
9.41
31.50
7.94
32.72
Natural
Fast
Natural
Fast
12.53
30.98
18.05
23.00
10.81
19.79
13.98
13.00
13.80
24.02
10.86
18.68
Natural
bt D
SujecFast
10.38
22.11
10.89
20.64
7.92
14.90
Natural
17.53
16.47
18.34
Fast
27.92
24.75
22.16
Subject
A
Subject
B
Subject
B
Subject
C
Subject
C
Subject
E
58