Cole’s Notes for Nonlinear Systems of ODEs 1 Introduction
advertisement

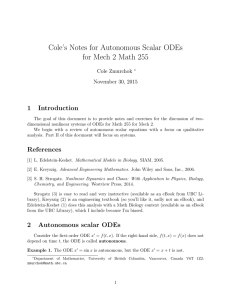
Cole’s Notes for Nonlinear Systems of ODEs for Mech 2 Math 255 Cole Zmurchok ∗ December 7, 2015 1 Introduction The goal of this document is to provide notes and exercises for the discussion of twodimensional nonlinear systems of ODEs for Math 255 for Mech 2. This is Part II of this document, and we discuss nonlinear systems, focusing on how to find steady-states, linearization, and qualitatively analyze these systems. References [1] L. Edelstein-Keshet. Mathematical Models in Biology. SIAM, 2005. [2] E. Kreyszig. Advanced Engineering Mathematics. John Wiley and Sons, Inc., 2006. [3] S. H. Strogatz. Nonlinear Dynamics and Chaos: With Application to Physics, Biology, Chemistry, and Engineering. Westview Press, 2014. Strogatz (3) is easy to read and very instructive (available as an eBook from UBC Library), Kreyszig (2) is an engineering textbook (so you’ll like it, sadly not an eBook), and Edelstein-Keshet (1) does this analysis with a Math Biology context (available as an eBook from the UBC Library), which I include because I’m biased. 2 Partial derivatives In calculus so far, we’ve only seen functions of one variable, for example, f (x), y(t) and θ(t) and we’re well acquainted with finding their derivatives. In this course, we’ve written functions of more than one variable, for instance f (t, y) to represent the right-hand side of an ODE that depends on both time and the solution. ∗ Department of Mathematics, University of British Columbia, Vancouver, Canada V6T 1Z2: zmurchok@math.ubc.ca 1 Consider a function of two-variables, say f (x, y). This function returns a real-value for each input pair (x, y). You can think of z = f (x, y) as a height above the point (x, y) in the xy-plane so that a function f (x, y) describes a surface in three-dimensional space. Example 1. The function f (x, y) = x2 + y 2 looks like a two dimensional parabola. See Figure 1. 8 f(x,y) 6 4 2 0 2 1 2 1 0 0 -1 y -1 -2 -2 x Figure 1 Example 2. The function f (x, y) = x2 − y 2 looks like a mountain pass. See Figure 2. 4 f(x,y) 2 0 -2 -4 2 1 2 1 0 0 -1 y -1 -2 -2 x Figure 2 Similar to derivatives in one-dimension, we can consider partial derivatives of these d functions. Instead of using the notation dx we will use ∂f to denote the derivative of the ∂x 2 function f (x, y) in the x-direction, and ∂f to denote the derivative of the function in the ∂y y-direction. Note that we have omitted all of the details. We don’t even have a notion of what it means for a multivariate function to be continuous, or how to take limits in higher-dimensions, yet we’re talking about derivatives! Calculating partial derivatives is easy. To calculate ∂f , we simply take derivatives as ∂x ∂f usual but treat y as a constant. To calculate ∂y , we simply take derivates as usual but treat x as a constant. Example 3. Let f (x, y) = x2 + y 2 . Then ∂f = 2x + 0 = 2x ∂x and ∂f = 0 + 2y = 2y. ∂y Example 4. Let f (x, y) = x3 y 3 − cos(xy). Then ∂f = 3x2 y 3 + y sin(xy). ∂x where we used the chain rule to differentiate cos(xy). Similarly ∂f = 3y 2 x3 + x sin(xy). ∂y 3 Nonlinear systems In this section, we consider nonlinear systems of ODEs. Specifically, we will consider systems of two equations–these we can begin to understand using mathematical and qualitative methods. We consider equations of the form x′ = f (x, y), y ′ = g(x, y), where f (x, y) and g(x, y) are possibly nonlinear functions of x and y. We exclude nonautonomous equations, and consider those systems of ODEs whose right-hand sides do not depend on time, t. Example 5. A nonlinear system is x′ = xy − y, y ′ = xy − x, whereas a linear system is R′ = aR R + bR J, J ′ = aJ J + bJ R. 3 We begin our qualitative and mathematical analysis by studying steady-states again. Definition 1. The steady states (x∗ , y ∗ ) satisfy f (x∗ , y ∗ ) = g(x∗ , y ∗ ) = 0. Example 6. The steady-states of x′ = xy − y, y ′ = xy − x, are found by setting both x′ = 0 and y ′ = 0. In this case, we find the system of equations 0 = y(x − 1), 0 = x(y − 1). This gives two steady-states: (0, 0) and (1, 1). The steady-states also lie at the intersection of the nullclines: • The x nullcline is found by setting x′ = 0. This is satisfied when x = 1 or when y = 0. • The y nullcline is found by setting y ′ = 0. This is satisfied when x = 0 or when y = 1. The flow direction can also be determined by checking values. For instance, the points (1, 10) and (1, 12 ) lie on the x nullcline. From this, we know that the flow is only the y direction at these points. Since g(1, 10) > 0, y ′ > 0 at (1, 10) and we know the flow is increasing in the y direction at this point. This is indicated on the diagram below with a red arrow. By checking more points, we can fill in the diagram to understand the trend of the flow. 4 3.0.1 Exercises Sketch the nullclines in the xy phase plane, identify steady-states, and draw directions on the nullclines for the following systems. 1. x ′ = y 2 − x2 y′ = x − 1 2. x′ = x2 − y y′ = y2 − x 3. x′ = x2 + y y ′ = −y 4. x′ = −xy y ′ = (1 + x)(1 − y) 5. −xy +x 1+x xy y′ = −y 1+x x′ = 5 3.1 Linearization The linearized system is ! " # ∂f ∗ ∗ (x , y ) d u = ∂x ∂g (x∗ , y ∗ ) dt v ∂x ∂f (x∗ , y ∗ ) ∂y ∂g (x∗ , y ∗ ) ∂y $! " ! " u u =J . v v J is called the Jacobian matrix evaluated at the steady-state (x∗ , y ∗ ) of the system. The linearized system describes the behaviour of the system near each of the steady-states. We will use the notation J = J(x, y) to denote the Jacobian matrix, and Jx∗ to denote the Jacobian matrix evaluated at a steady-state. The linearized system describes the behaviour of the system near each of the steadystates. Example 7. Consider the system x′ = x + e−y , y ′ = −y. We can find the steady-states by setting x′ = 0 and y ′ = 0. y ′ = 0 is only satisfied if y = 0, which requires that x = −1. Thus, the only steady-state is (−1, 0). We can find the Jacobian matrix: ! " 1 −e−y J= . 0 −1 Evaluating the Jacobian matrix at the steady-state we find ! " 1 −1 J(−1,0) = . 0 −1 The eigenvalues of this matrix are λ1 = −1 and λ2 = 1 with eigenvectors v1 = (1, 2) and v2 = (1, 0) Hence, we expect (−1, 0) to look like a saddle point locally. Indeed, if we plot the direction field and several trajectories, we find: 6 Example 8. Above we found that the steady-states of x′ = f (x, y) = xy − y, y ′ = g(x, y) = xy − x, are found by setting both x′ = 0 and y ′ = 0. This gives two steady-states: (0, 0) and (1, 1). For this system, we find that ∂f ∂f = y, = x − 1, ∂x ∂y ∂g ∂g = y − 1, = x. ∂x ∂y The Jacobian matrix is J= so we find that J(0,0) = ! ! " y x−1 , y−1 x 0 −1 −1 0 " and J(1,1) = ! " 1 0 . 0 1 Thus, we can classify (1, 1) as a source (node) since eigenvalues λ1 = λ2 = 1 with eigenvectors v1 = (1, 0) and v2 = (0, 1) respectively. Also, we can classify (0, 0) as a saddle point since the eigenvalues of J(0,0) are λ1 = −1 and λ2 = 1 with eigenvectors v1 = (1, 1) and v2 = (−1, 1) respectively. Adding this information to our diagram, and connecting trajectories reveals the qualitative behaviour of the system: 7 Remark 1. A caveat: the linearization method fails if one or more of the eigenvalues has ℜ(λ) = 0. If we have purely imaginary eigenvalues (think: centres) or at least one zero eigenvalue (which gives non-isolated fixed points), then the linearization method cannot be used to draw conclusions above behaviour of the system. Definition 2. A steady-state (x∗ , y ∗ ) is called hyperbolic if for every eigenvalue λ of J(x∗ ,y∗ ) we have ℜ(λ) ̸= 0. Exercise 1. To see how linearization can fail in the case when at least one eigenvalue ℜ(λ) = 0, consider the system x′ = −y + ax(x2 + y 2 ) y ′ = x + ay(x2 + y 2 ), where a < 0, a = 0, or a > 0. Find the linearized system and predict the stability of the steady-state (0, 0). The linearization predicts that the origin is a centre. Use MATLAB or some other software to plot trajectories of the system in the xy-plane in each of the three-cases: a < 0, a = 0, a > 0. You’ll notice that only in the case a = 0 that the trajectories are periodic. Remark 2. Please note that we have omitted many of the details and particulars about this type of analysis, and have only scratched the surface. The methods discussed here and the examples below provide a brief introduction to the qualitative study of two-by-two systems. However, for many systems, the basic techniques we have discussed here need to be complimented with more elaborate analysis. Example 9. Here is a completely worked example. Consider the system x′ = x − y, y ′ = x2 − 4. The x-nullcline is the line y = x, and the y-nullcline are the lines x = 2, and x = −2. The steady-states lie at the points of intersection: (−2, −2) and (2, 2). By checking the signs of x′ and y ′ on each of the nullclines we can crudely determine the direction of the trajectories across nullclines. This has been added to the figure in red. The Jacobian matrix is # $ ! " ∂f ∂f 1 −1 ∂x ∂y J = ∂g ∂g = , 2x 0 ∂x ∂y so that J(−2,−2) = ! " 1 −1 , −4 0 and J(2,2) = 8 ! " 1 −1 . 4 0 √ √ The eigenvalues of J(−2,−2) are λ1 = 12 + 217 and λ2 = 12 − 217 . Note that Re(λ1 ), Re(λ2 ) > 0. This means that the steady-state (−2, −2) is hyperbolic, and we are justified in drawing conclusions from the linear stability analysis. We conclude that the steady-state (−2, −2) is locally a saddle point. To determine the direction of trajectories nearby the steady-state, we can find the eigenvectors associated to the eigenvalues λ1 and λ2 . I found these numerically so they are approximately ! " ! " 0.5393 0.3637 v1 ≈ v2 ≈ . −0.8421 0.9315 √ √ Similarly, the eigenvalues of J(2,2) are λ1 = 12 + i 215 and λ2 = 12 − i 215 . Note that ℜ(λ1 ) = ℜ(λ2 ) = 12 > 0. This means that the steady-state (2, 2) is hyperbolic, and we are justified in drawing conclusions from the linear stability analysis. In this case, we find that (2, 2) is locally an unstable spiral. 9 Updating our figure, we find: Finally, we can fill in the rest of the phase-plane as sketched below. The justification for this step results from the fact that solution to the ODE x(t), y(t) should be at least differentiable. In this case, the trajectories are continuous and non-intersecting (except at steady-states). See Strogatz (3), Chapter 6, for a more detailed discussion. 10 3.2 Exercises For each of the following systems, find the steady-states, classify them using linear stability analysis, sketch nearby trajectories, and try to fill in the rest of the phase portrait. 1. x′ = x − y, y ′ = x2 − 9. 2. x′ = x − y, y ′ = −x2 + 9. 3. x′ = sin y, y ′ = x − x3 . 4. x′ = xy − 1, y ′ = x − y 3 . 5. x′ = x(3 − 2x − y), y ′ = y(2 − x − y). Gm2 Gm 1 6. (Bead on a wire moving due to gravity) x′′ = (x−a) , G is the gravitational 2 − x2 constant, mi are masses, a is the distance between the masses and x denotes the distance of the particle from m1 . 7. (Lasers) n′1 = G1 N n1 − k1 n1 , n′2 = G2 N n2 − k2 n2 , where N = N0 − α1 n1 − α2 n2 . Parameters G1 , G2 , k1 , k2 , α1 , α2 ,N0 are all positive. Use linear stability analysis to classify the origin. 8. (Damped pendulum) θ′′ + cθ′ + g L sin θ = 0. 9. Write a MATLAB script that sketches phase-planes for arbitrary two-dimensional autonomous systems. 11