Hc by Eric Scott Hamby
advertisement

Hc STATIC FEEDBACK CONTROL WITH AND WITHOUT
IMAGINARY AXIS ZEROS FOR MISSILE AUTOPILOT DESIGN
by
Eric Scott Hamby
B.S., Aerospace Engineering, The University of Kansas
Lawrence, Kansas (1990)
Submitted to the Department of Aeronautics and Astronautics
in Partial Fulfillment of the Requirements for the Degree of
MASTER OF SCIENCE in AERONAUTICS AND ASTRONAUTICS
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June, 1992
© Eric Scott Hamby, 1992. All rights reserved
Signature of Author
Department of Ieronautics and Astronautics
//May 15, 1992
~
Certified by
Professor Lena Valavani
Department of Aeronautics & Astronautics
Thesis Advisor
Approved by
Dr. Charles Tse
Charles Stark Draper Laboratory
Technical Supervisor
Approved by
Dr. Kevin Wise
McDonnell Douglas Missile Systems Company
Technical Supervisor
Accepted by
otýfessor Harold Y. Wachman
Chairman, Department Graduate Committee
MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
.=
55
Hoo STATIC FEEDBACK CONTROL WITH AND WITHOUT
IMAGINARY AXIS ZEROS FOR MISSILE AUTOPILOT DESIGN
by
Eric Scott Hamby
Submitted to the
Department of Aeronautics and Astronautics
on May 15, 1992.
in partial fulfillment of the requirements for the degree of
Master of Science in Aeronautics and Astronautics
ABSTRACT
A normal acceleration command missile autopilot design algorithm using H. static
feedback theory is developed for two cases: (1) The augmented missile plant does not have
imaginary axis zeros and (2) The augmented missile plant has imaginary axis zeros at
infinity. For the first case, an H., state feedback theorem derived by Stoorvogel is used to
form an H, state feedback controller for the missile autopilot design algorithm. An
informal proof of this theorem is given using a differential game approach. For the second
case, the issues of why imaginary axis zeros cause problems in H. design and how
imaginary axis zeros can appear in missile autopilot design are addressed first. Then, a
frequency domain loop shifting method is used to derive an H. full information feedback
controller for the missile autopilot design algorithm.
For each of the above cases, the normal acceleration command missile autopilot is
evaluated using both time and frequency domain performance metrics. The H., state
feedback controller used in the first case results in a missile autopilot characterized by a
large maximum fin rate and a high loop gain crossover frequency. A mixed H2 - H,.
approach is then examined as a means of tailoring the autopilot performance. For the
second case, the H. full information feedback controller also results in a missile autopilot
characterized by a large maximum fin rate and a high loop gain crossover frequency.
However, the mixed H2 - H. approach is shown to be an ineffective means of tailoring
the autopilot performance because of a property inherent in the frequency domain loop
shifting method.
Thesis Supervisor:
Dr. Lena Valavani
Associate Professor of Aeronautics and Astronautics
Technical Supervisor: Dr. Charles Tse
Staff Engineer, The Charles Stark Draper Laboratory, Inc.
Technical Supervisor: Dr. Kevin Wise
Staff Specialist, Advanced Guidance, Navigation, and Control,
McDonnell Douglas Missile Systems Company
Acknowledgments
This study represents the culmination of two years of graduate study at MIT and
Draper. Without the efforts and contributions of the people mentioned here, this study
would not have been possible.
First, I would like to thank the people at The Charles Stark Draper Laboratory,
particularly, Dr. George Schmidt and Marty Boelitz for providing me with opportunity to
do graduate work at MIT. My gratitude also goes out to Dr. Charles Tse whose advice and
comments were always instructive.
Next, I would like to thank my thesis advisor, Professor Lena Valavani. Her
suggestions and guidance were a constant aid throughout the development of this study. In
addition, her advice on research, control engineering, and life in general continues to be
motivating.
I would also like to thank Dr. Kevin Wise and Tam Nguyen (soon to be Dr.
Nguyen) for their guidance, insight, and, most importantly, friendship. Their efforts led to
the inception of this study, and I hold them liable for my interest in control system design.
Finally, I would like to thank Christine Lile and my parents. Their love and
support made the tough times easier and the successes sweeter.
"They say he give them but two words. 'More weight'..."
- Elizabeth Proctor from The Crucible
This thesis was prepared at The Charles Stark Draper Laboratory, Inc. under Navy
Contract N00030-92-C-0003.
Publication of this thesis does not constitute approval by Draper or the Navy of the
findings or conclusions contained herein. It is published for the exchange and stimulation
of ideas.
I hereby assign my copyright of this thesis to The Charles Stark Draper Laboratory,
Inc., Cambridge, Massachusetts.
Eric Hamby
Permission is hereby granted by The Charles Stark Draper Laboratory, Inc., to the
Massachusetts Institute of Technology to reproduce any or all of this thesis.
Table of Contents
Chapter
Page
1. Introduction
1.1 Background
1.2 Motivation and Previous Work
1.3 Thesis Overview
2.
3.
Missile Dynamics
2.1 Introduction
2.2 Translational and Rotational Equations of Motion
2.2.1 Translational Equations in Component Form
2.2.2 Rotational Equations in Component Form
2.3 Linearized Equations of Motion
2.3.1 Stability Axes Reference System
2.4 Forces and Moments
2.4.1 Perturbed Forces and Moments
2.5 Assembling the Linearized Equations of Motion
2.6 Open Loop Dynamics for the Normal
Acceleration Autopilot Design
2.6.1 Actuator Model
2.6.2 Normal Acceleration
H.. State Feedback Control
3.1 Introduction
3.2 H. State Feedback Theorem
3.3 Informal Proof of Theorem 3.1
3.3.1 First Order Necessary Conditions
3.3.1.1 The ARE
3.3.1.2 The Optimal Control, the Optimal Exogenous
Input, and the Controller
3.3.2 Second Order Necessary Conditions
3.4 H. State Feedback Design Algorithm
3.4.1 Weighting Function Selection
3.4.2 Forming the Augmented Plant
23
23
24
25
25
27
29
31
32
32
3.5 Design Results
3.5.1 y~in, the H, State Feedback Gains, and the
Closed Loop Poles
3.5.2 Time Domain Results
3.5.3 Frequency Domain Results
4.
5.
54
54
55
60
H. Full Information Feedback Control With
Zeros on the Imaginary Axis
4.1 Introduction
4.2 Why Imaginary Axis Zeros Cause Problems in H.. Design
65
65
66
4.3 Imaginary Axis Zeros in Missile Autopilot Design
4.4 H. Full Information Feedback Design Algorithm
69
69
4.4.1 Forming the Augmented Plant
4.4.2 Properties of the Bilinear Transform
4.4.3 Transforming the Augmented Plant
4.4.4 Forming the Full Information Feedback Gain Matrix, F
4.5 Design Results
4.5.1 How e Affects y7in, the Performance Output, and
the Stability Robustness Output
4.5.2 Ymin, the H. Full Information Feedback Gains, and the
Closed Loop Poles
4.5.3 Time Domain Results
4.5.4 Frequency Domain Results
71
72
74
78
80
Conclusions
5.1 Summary of Results
5.1.1 Chapter 3 Results
5.1.2 Chapter 4 Results
5.2 Contributions
5.3 Future Study
94
94
94
95
97
98
80
86
87
90
Appendix A
99
References
103
List of Figures
Page
Figure
1.1
1.2
2.1
3.1
Bank-to-Turn Missile Configuration
Plant and Compensator Interconnection
Stability Axes System
Block Diagram of the H. State Feedback Algorithm
Used in the Normal Acceleration Command Autopilot Design
Augmented Plant and Controller Structure
Weighting Function Frequency Response
Normal Acceleration Response to a Unit Step Acceleration Command
Fin Rate Response to a Unit Step Acceleration Command
Fin Angle Response to a Unit Step Acceleration Command
Pitch Rate Response to a Unit Step Acceleration Command
Angle of Attack Response to a Unit Step Acceleration Command
Nyquist Plot
Loop Transfer Function, L
(I+ L- 1) Vs Frequency
22
17
30
64
64
66
4.5
Complementary Sensitivity and Sensitivity Transfer Functions, T and S
Maximum Singular Value of the Closed Loop Operator, Tzw
A General Plant-Controller Interconnection
Block Diagram of the H. Full Information Feedback Algorithm
Used for Missile Autopilot Design When P,, Has Imaginary
Axis Zeros at Infinity
Bilinear Map
The Effect of e on Ymin
The Effect of e on Oma(P)
4.6
The Effect ofe on Oam(Perr)
83
4.7
4.8
4.9
4.10
4.11
4.12
The Effect of e on Rise Time
The Effect of Eon Settling Time
The Effect of e on %US
The Effect of e on %OS
The Effect of e on Max Fin Rate
The Effect of e on GM
83
84
84
84
84
85
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
4.1
4.2
4.3
4.4
48
49
52
57
58
58
59
59
62
63
63
70
73
83
83
4.13
4.14
4.15
The Effect of Eon PM
The Effect of Eon wc
0
The Effect of e on i(I +L- 1)
85
85
4.16
4.17
4.18
4.19
4.20
4.21
4.22
4.23
Normal Acceleration Response to a Unit Step Acceleration Command
Fin Rate Response to a Unit Step Acceleration Command
Fin Angle Response to a Unit Step Acceleration Command
Pitch Rate Response to a Unit Step Acceleration Command
Angle of Attack Response to a Unit Step Acceleration Command
Nyquist Plot
Loop Transfer Function, L
(I+ L- ) Vs Frequency
88
88
89
89
90
91
92
92
4.24
4.25
Complementary Sensitivity and Sensitivity Transfer Functions, T and S
Maximum Singular Value of the Closed Loop Operator, T,
93
93
85
List of Tables
Table
3.1
3.2
3.3
4.1
4.2
4.3
Page
H,. State Feedback Gains and Closed Loop Pole Locations
Time Domain Performance Metrics
Frequency Domain Performance Metrics
H.. Full Information Feedback Gains and Closed Loop Pole Locations
Time Domain Performance Metrics
Frequency Domain Performance Metrics
55
56
61
86
87
91
List of Notation
Symbol
Az
C(s)
C1
Cm
Cn
Cx
Cy
Cz
fi
F
F
H
I
lii
lij
J
K
kt
kh
1
L(s)
M
m
mi
p
P
P
PZu
p
q
Description
Normal Acceleration
Control activity
Rolling moment coefficient
Pitching moment coefficient
Yawing moment coefficient
Force coefficient in the X-direction
Force coefficient in the Y-direction
Force coefficient in the Z-direction
Force acting on the missile in the i-direction
Full information feedback gain matrix
Total force acting on the missile
Angular momentum vector
Inertia dyad
Moment of inertia about the i-axis
Product of inertia
Cost functional
State feedback gain matrix
Low frequency weighting parameter
High frequency weighting parameter
Reference length
Loop transfer function from the actuator input
Total moment acting on the missile
Missile mass
Moment acting on the missile about the i-axis
Costate vector
Linear momentum vector
Positive semidefinite solution to the ARE
Transfer function from the control vector, u, to
the output vector, z
Body axis roll rate
Body axis pitch rate
q
r
s
S
S(s)
t
Tr
Ts
T(s)
Dynamic pressure
Body axis yaw rate
Laplace transform variable
Reference Area
Sensitivity transfer function
Time
Rise time
Settling time
Complementary transfer function
y
z
XYZ
XsYsZs
Closed loop operator from the exogenous input vector,
w, to the output vector, z
Control input vector
Body axis velocity in the X-direction
Body axis velocity in the Y-direction
Missile velocity vector
Body axis velocity in the Z-direction
Exogenous input vector
Control activity weight
Sensitivity weight
Complementary sensitivity weight
State vector
Measurement vector
System output vector
Body axis reference system
Stability axis reference system
e
H2
Transformed
Is an element of
The set of asymptotically stable transfer functions G,
Tzw
u
u
v
V
w
w
Wc (s)
Ws (s)
WT (s)
x
with lGl1|2 <*
H*.
The set of asymptotically stable transfer functions G,
with
i1 2
IG12
IjIGL
<**
x(t) x(t)dt
, if x(t) is a real, vector-valued signal
(V/2)f tr[G(jo)GT(-jW)]do} , if G is a transfer function
JIG|11
sup(amaxG(jw)), if G is a transfer function
The set of real vectors of dimension n
Greek Letters
a
P8
Angle-of-attack
Sideslip angle
Flight path angle
Iterative parameter that bounds
8C
Sc
Sr
C
e
0)
0)
(D
IITz ll.
Small perturbation
Control surface angle
Aileron angle
Commanded control surface angle
Elevator angle
Rudder angle
Parameter used in the bilinear transform
Pitch angle
Time constant
Damping factor
Missile angular velocity vector
Frequency
Loop gain crossover frequency
State transition matrix
A partition of the state transition matrix
max (X)
An (X)
Subscripts
a
BW
C
CL
max
Maximum eigenvalue of X
Minimum eigenvalue of X
Maximum singular value of X
Maximum singular value of X
Augmented
Bandwidth
Control activity
Closed loop
Maximum
min
o
P
S
T
Minimum
Steady state or initial
Plant
Sensitivity
Complementary sensitivity
Superscripts
0
T
Acronyms
ARE
deg
err
GM
LGCF
LHP
LHS
LQR
MIMO
PM
RHP
RHS
SIMO
%OS
%US
Optimal
Transpose
Algebraic Riccati equation
Degrees
Error
Gain margin
Loop gain crossover frequency
Left half plane
Left hand side
Linear quadratic regulator
Multi-input, multi-output
Phase margin
Right half plane
Right hand side
Single input, multi-output
Percent overshoot
Percent undershoot
Chapter 1
Introduction
1.1 Background
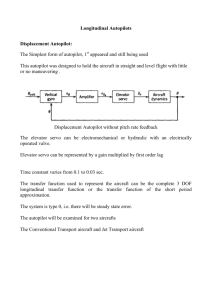
An asymmetric air-to-ground bank-to-turn (BTT) missile configuration designed
for "conformal carry" by an advanced fighter aircraft is shown in Figure 1.1 [1].
Aerodynamic analyses of this airframe configuration show that strong roll-yaw coupling
is present. Large roll rates are induced by a sideslip angle created primarily by the
asymmetry of the vehicle. For this reason, linearized pitch dynamics are separated from
the linearized coupled roll-yaw dynamics. The resulting autopilot design consists of a
normal/pitch acceleration autopilot and a lateral roll-yaw autopilot. This thesis is only
concerned with the design of the normal acceleration command autopilot.
Stability and robustness requirements for current and future bank-to-turn missile
configurations necessitate the use of optimally designed flight control systems. Robust
design requirements are generally driven by high-maneuver rates needed for terminal
homing. Stability robustness concerns are often related to large launch envelopes and
uncertainties in plant dynamics created by "conformal" and "internal carry" missile
configurations. The H. optimal control methodology allows the designer to address
these problems.
The topology of a general H. control problem is shown below.
Figure 1.2 Plant and Compensator Interconnection
The plant, P, shown in Figure 1.2 is assumed to be a finite dimensional linear time
invariant model. Also, note that this figure has two sets of inputs, w and u, and two sets
of outputs, z and y. w is referred to as the exogenous input and consists of the commands,
disturbances, sensor noises, etc., and u is the control input. z contains the output of the
system, and y consists of the measurement.
The objective of the H. control problem is to minimize the H. norm of the
closed loop operator from w to z, denoted as Tz.
IITz
The H. norm of Tzw is defined as
= sup o'max[Tzw(j')]}
(1.1)
This minimization is accomplished through the design of the compensator, K. A
constraint imposed on the design of K is that the mapping from y to u must result in a
closed loop system that is internally stable [2].
If the measurement is of the form y = x or y = [x w]T then the resulting H.
problem is referred to as a full state feedback problem or a full information feedback
problem, respectively. For either case, the solution to the H. problem results in a static
feedback compensator, which can be calculated by solving a single algebraic Riccati
equation [2]. If the entire state vector is not available for measurement, then the resulting
H. problem is referred to as an output feedback problem. The solution to this H,.
problem results in a dynamic compensator, which can be calculated by solving a set of
two algebraic Riccati equations [2]. In this thesis, the assumption is made that the
measurement consists of either the full state or full information.
For either the full state feedback case or the full information case, if the transfer
function from u to z, denoted as Pu, has zeros on the imaginary axis (either finite or
infinite), then the resulting H. problem is singular [2]. Another singular H. static
feedback problem occurs when the direct feedthrough matrix from u to z is not injective
[2]. The singular H. problem considered in this thesis is for the case when Pzu has
imaginary axis zeros at infinity.
1.2 Motivation and Previous Work
The H. static feedback theory given in [2] generalizes the results presented in
[3]. Both papers state that, for the static feedback case, a stabilizing controller exists such
that the closed loop system has H. norm less than some y > 0, if and only if there exists
a positive semidefinite solution to a certain algebraic Riccati equation (ARE). However,
the DGKF paper ([3]) assumes that the output matrices, defined by z = Cx + Dju are of
the form DT[C
,]= [0 I]. While this assumption was made only to facilitate the
proofs, it is restrictive in terms of design. In [2], Stoorvogel allows the output to be of the
form z = Cx + DAu + D2w, where the only assumption made concerning the output
matrices is that D1 is injective. Because of the general form of z, the ARE given in [2] is
more complicated than that given in [3].
In [1], Wise and Nguyen were the first to apply the H.. full state feedback theory
given in [2] to missile autopilot design. However, the algorithm used in [1] to design the
H.. state feedback controller for the normal acceleration command missile autopilot
assumed that DTD 2 =0. In Chapter 3 of this thesis, the algorithm given in [1] is
generalized by removing the assumption that DTD2 = 0.
Both Safonov and Stoorvogel (see [2] and [4]) give specific methods for solving
the H. control problem when P.u has zeros on the imaginary axis. In [4], Safonov first
discusses a frequency domain loop shifting method. The discussion is heuristic and
concludes with the following design procedure:
(1) transform the state space
representation of the plant using a bilinear transformation of the s-plane, (2) design an
H., controller for the transformed system, and (3) perform the inverse transformation on
the state space representation of the control law given in (2). Next, Safonov discusses
canceling imaginary axis zeros with mixed sensitivity weighting functions. This second
method was demonstrated in a multivariable aircraft design example [5]. In [2],
Stoorvogel gives both a heuristic description of the frequency domain loop shifting
method and the necessary details for designing an H. full information feedback
controller using this method. Unlike the second method given in Safonov, the frequency
domain loop shifting method has not been applied to an autopilot design problem. In
Chapter 4 of this thesis, the frequency domain loop shifting method is applied to the
design of a normal acceleration autopilot. This represents a new result in missile
autopilot design.
A more general treatment of H. control with zeros on the imaginary is given in
[6] and [7]. Reference [6] investigates the imaginary axis zeros problem using matrix
inequalities. Reference [7] presents a necessary and sufficient condition for the solution
of the one-block H,. control problem with imaginary axis zeros.
1.3 Thesis Overview
The purpose of this study is to provide heuristic explanations of the H. static
feedback theory given in [2] and to design an H, static feedback controller for a normal
acceleration command missile autopilot for both the nonsingular and the singular case.
To this end, the thesis is organized as follows:
* Chapter 2: "Missile Dynamics". This chapter shows how to linearize the
nonlinear equations of motion for a missile about a trim point.
Linearization results in decoupling the pitch dynamics from the roll-yaw
dynamics. The open loop dynamics needed for the normal acceleration
autopilot are formed from the linearized pitch dynamics and a second
order model of a fin actuator.
* Chapter 3: "H. State Feedback Control". Theorem 3.2 of [2] is used as
the basis of a normal acceleration command missile autopilot design
algorithm. An informal proof of this theorem is given using a differential
game approach. Next, a block diagram of the design algorithm is
presented, and each component of the diagram is explained in detail.
Finally, the time and frequency domain performance metrics associated
with the autopilot design are presented.
* Chapter 4: " H. Full Information Feedback Control With Zeros on the
Imaginary Axis." A missile autopilot design algorithm is developed using
the frequency domain loop shifting method for the case when the
augmented plant has zeros on the imaginary axis. First, a discussion of
why imaginary axis zeros result in an ill-conditioned H,. problem and
how imaginary axis zeros appear in missile autopilot design is given.
Next, a heuristic explanation of the frequency domain loop shifting
method is given, and the results of this method applied to an H,. full
information feedback problem are derived. Then, a block diagram of the
design algorithm is presented, and each component of the diagram is
explained in detail. Finally, the time and frequency domain performance
metrics associated with the autopilot design are presented.
* Chapter 5: "Conclusions." This chapter summarizes results, gives the
contributions of the thesis, and suggests avenues of future research.
x
+P9
+U :%v
o
4
z
Y
Figure 1.1 Bank-to-Turn Missile Configuration
Chapter 2
Missile Dynamics
2.1 Introduction
In this chapter, the nonlinear equations of motion describing missile aerodynamics
are linearized about a trim point in order to form a finite dimensional linear time invariant
(FDLTI) model that can be used to design an autopilot. Linearization results in
decoupling the pitch dynamics from the coupled roll-yaw dynamics. The resulting
autopilot design consists of a normal/pitch acceleration command autopilot and a lateral
roll-yaw autopilot. Because this thesis is only concerned with the design of a normal
acceleration command autopilot, attention is focused on the development of the linearized
pitch dynamics. A chapter summary is presented below.
Section 2.2: Nonlinear translational and rotational equations of motion are
derived using Newton's Second Law. Section 2.3: The nonlinear equations of motion
given in Section 2.2 are linearized about a steady state flight condition. Section 2.4: The
forces and moments acting on the missile are discussed, and expressions for the linearized
forces and moments are derived. Section 2.5: The linearized equations of motion for the
missile are assembled using results from Section 2.3 and Section 2.4. Section 2.6: The
open loop dynamics for the normal acceleration autopilot design are assembled using the
pitch state dynamics from Section 2.5, an actuator model, and an expression for normal
acceleration.
2.2 Translational and Rotational Equations of Motion
In this section, the translational and rotational equations of motion (EOM) for the
missile are derived in a body-fixed axes system and are subject to the following
assumptions [8]:
* The missile is a rigid body.
* The mass and inertia properties of the missile remain constant over the time of
the dynamic analysis.
* The earth is an inertial reference frame.
Given the above assumptions, the linear and angular momentum vectors are
P=mV
H = Ico
(2.1)
where:
* V = [u v W]T is the missile velocity in the body fixed reference frame.
* ow = [p q r]T is the missile angular velocity in the body fixed reference frame.
* I= -lyx
Iyy
-ly, is a symmetric matrix representing the inertia dyadic in
a body fixed reference frame.
Expressing Newton's Second Law in terms of conservation of both linear and
angular momentum yields the following vector differential equations of motion for the
missile:
d(mV)
F
dt
d(Iw)M
dt
(2.2)
where, F includes all forces acting on the missile and M includes all moments acting on
the missile. Performing the differentiation operation in Eq (2.2) with respect to a nonrotating reference frame yields
d(mV) =rhV+mV+oxmV
(2.3)
dt
d(Iw)= o +Ib+ W xIo
dt
At the beginning of the section, mass and inertia properties were assumed to be constant;
therefore, Eq (2.2) and Eq (2.3) can be combined as
V="V=1wxV+
- x V +- F
F
(2.4a)
cb = I-1[-C x I]+ I-IM
(2.4b)
m
2.2.1 Translational Equations in Component Form
The cross-product term in Eq (2.4a) can be written as
Vz (y-Vy (z
("
(2.5)
xV= VxOz -VzO),
VYwx -VxCY
With the definitions for V and w given in Eq (2.1) and the expansion shown in Eq (2.5),
the component form of Eq (2.4a) is
S= vr-wq +- f
m
1
i = wp - ur+- f,
m
(2.6)
wv = uq - vp +- f,
m
2.2.2 Rotational Equations in Component Form
If the cross products of inertia Ixy and Izy are assumed to be zero, an expression
for I- is as follows:
I[Izz
1
O1= 1 _
0
0
I[
IoYI]x
-
The cross-product term, w x Iw, in Eq (2.4b) can be written as
(2.7)
I,),I 0
-
(I.Cx x x Ix.
Iyy Wy W
(2.8)
(Io,
- Iyy,)
a
y
Carrying out the multiplication in Eq (2.4b) using the expressions in Eq (2.7) and
Eq (2.8) yields the following equation for (d:
(-i, + li
+X
-
(-ix, +
0=
+iI.ij),x C
+IMM2 _ IC2
I,
+(I, -I=Y
-Ixzz + IYYlx - a )OW
L
-x
~~r
+I~
+ I)
3 m +i,. M
my
m,,)CO
(2.9)
+ Ix-mx +Imz
X
Using the definition for a and Eq (2.9), the component form of the rotational equations
Eq (2.4b) is
[b = Lq, qr + Lppq +
(I,,m, +lxm,)
Ixxzz -I
(2.10)
S= Mppr + M2p2(r2 _ p 2 ) +
IYY
i = Nqqr + Np,pq + (Ixm
where:
_ 12
l z_ 2
YY
Lqr
zz
2 XZ
Ixxlzz - I'
Mpr
= Izz - IXX
IY
Mr2=
2 IYY
x
++ lm, )
I, (I"
I
- I-z
2 2 +
Iyy
The translational equations Eq (2.6) and the rotational equations Eq (2.10) comprise a set
of six nonlinear differential equations of motion which are summarized below [9]:
zi = vr-wq+- fx
m
1f
(2.11)
i = wp - ur + If,
m
i= uq - vp +- fZ
m
p = Lqqr + Lpq + (I.mx + Im,)
4= M, pr + M7 2p, (r2 - p 2 )+
m
S= Nq,qr + Nqpq +
2.3 Linearized Equations of Motion
The purpose of this section is to linearize the nonlinear equations of motion given
in Eq (2.11). The linearization is carried out according to the following steps [10]:
Step 1: Derive the nonlinear dynamic model.
Step 2: Establish steady-state equilibrium conditions.
Step 3: Derive relations of small variations of all variables about a steady-state
equilibrium and retain the linear terms while ignoring quadratic and
higher order terms.
To illustrate this procedure, consider the scalar, nonlinear differential equation
i = f(x(t),u(t)). Let the equilibrium condition be given by f(xo,u 0o)= 0. Then, Step 3
is carried out as follows:
&(t)= f(x. + x(t),u.+ u(t))= f(x.,u.)+f. 8x(t)+ ••
+
+
2
i&' (t)+
20
(t)
(2.12)
x2
f(2.12)
2 &2
ff&(t)8u(t)+
dxdu
h.o. t.
Keeping the linear terms and ignoring the higher order terms (h.o.t.) (as specified in Step
3) reduces Eq (2.12) to the following linearized differential equation:
= f(t) 8x (t)
+ o 8u(t)
(2.13)
Linearizing the nonlinear differential equations for the missile Eq (2.11) about a
steady state flight condition (denoted with a subscript "o") according to Steps 1-3 above
yields
S= vo8r+ ro v- w,8
-
qo
-+1 f
m
S= wo 6p + poSw - uo&r - rou +1-fy
m
w=uo6q +qocU - Vop - poSv +- 8f.
m
'6P=
LqqoSr + Lqrroq + LpPo
+ Lpqop +
+ 1
Z
84 = MproSr + M,proSp + Mr2 , 2 (2ro•r - 2 Pp)+
(2.14)
Sm
(2.14)
I, +
6r = Nqrqo0 r + Nq,rroSq + Nqpq3q + NXqo
+c5
• •
I=xzz
I 6MZ
-
I=2
In missile autopilot design, the steady-state flight condition is assumed to be such that [9]
* vo = 0; The steady-state lateral velocity is zero.
*po = qo = ro = 0; The steady-state body angular rates are zero.
Applying the above assumptions to Eq (2.14) results in the following:
1
& = -woq+-18fx
m
fY
b 0 3p-uy
~w- uosr + 1+S= WoSP
m
1
S= uoSq+-1Sf
m
(2.15)
(2.15)
(I,,4mX +xZ
6m)
Sm
I
(IXmx +ISm,)
Ixxlzz -_12
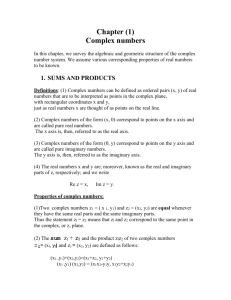
2.3.1 Stability Axes Reference System
In missile autopilot design, the linearized equations of motion Eq (2.15) are often
transformed from a generic body-fixed reference frame to a specific body-fixed reference
frame called the stability axes system [9]. The stability axes are shown in Figure 2.1 and
are defined as follows: Consider the steady-state flight condition given above, and define
the steady-state angle-of-attack, ao, as the angle between the free stream velocity vector,
Vo and uo [11]. The stability axes Xs Ys Zs are obtained from the body axes X Y Z by
rotating about Y=Ys over an angle a o until X coincides with Vo. By making this
transformation, wo = 0, and the translational equations reduce to
1
m
= -uor +l 1 f,
m
1
S
o3w=uSq
+- f Z
m
(2.16)
where: uo now equals V. and Su, 6v, and Sw are defined along the stability axes. The
rotational equations have the same form as before, but now the angular rates p, q, and r
and the inertia matrix I are assumed to be given in the stability axes system. The angular
rates can be transformed to the stability axes system from the original body fixed axes
system according to the following transformation:
(2.17)
b, = C,bCbb
where:
cos(a 0 ) 0 sin(a,)
SC =
0
[-sin(a•)
1
0
0 cos(ao)
Scb, = cQ= c,1
The inertia matrix given in Eq (2.1) is a representation of the inertia dyadic in the original
body fixed reference frame. A matrix representing the inertia dyadic in the stability axes
system is calculated by transforming the matrix representing the inertia dyadic in the
original body fixed reference system. This transformation is given below.
(2.18)
I, = CsbbCbs
For the case when vo • 0, the missile is said to be sideslipping. The sideslip
angle P is defined in Figure 1.1. The stability axes system in this case is defined in such a
way that the X s axis lies along the projection of the steady state velocity of the missile
onto the XZ plane [11]. However, in a bank-to-turn missile autopilot, f is regulated to 0;
therefore, the stability axes system defined in Figure 2.1 is used [9].
Iv-
Figure 2.1 Stability Axes System
2.4 Forces and Moments
The purpose of this section is to discuss the forces and moments acting on the
missile and to develop expressions for the perturbed forces and moments needed for Eq
(2.15).
The forces acting on the missile include aerodynamic, gravitational, and thrust
forces, denoted as FA, FG, and FT, respectively. Moments acting on the missile include
thrust and aerodynamic moments denoted as MA and MT, respectively. In developing the
equations for the perturbed (i.e. linearized) forces and moments, only aerodynamic forces
and moments are considered [9].
The aerodynamic forces and moments can be nondimensionalized as follows:
FA =
jSCx
FAX= ;SC
(2.19)
FA = iSSCz
MAx = qSICI
MAy = iSICm
MA = 0SIC,
where i7 is dynamic pressure (N/
2
), S is a reference area (m2), I is a reference length
(m), and the Ci' s are force and moment coefficients.
The force and moment coefficients are modeled as functions of a, f, Mach
Number, and the control surface deflections Se,
6
a,
and 6,. Simplified equations for
these coefficients are as follows:
Cx =Cx, +Cxa +Cxa 8e
Cy = Cyo + CY P + CY
a + Cy,
Cz =Cz, +Czaa +Cz 6,
r
(2.20)
S= C +Ci +G,
C18
+ C,, r
cm =cm~ +Caa +Cme 3
Cn = Coo + C,
0 P +Cn, 6a + Cn,
The coefficients of a,
,r
J, and the control surface deflections are referred to as stability
derivatives.
2.4.1 Perturbed Forces and Moments
In the beginning of this section, the assumption was made that only linearized
aerodynamic forces and moments influence the equations of the perturbed (i.e. linearized)
forces and moments. Furthermore, assume that damping forces proportional to body
rates are negligible and that the perturbed forces and moments depend only on the
instantaneous values of the motion and control variables and not on the time history of
these variables [11, 12]. Carrying-out the linearization steps given in Section 2.2 results
in the following equations for the perturbed forces and moments:
x=s(Cx,,aa +Cx,, 8())
((Sa)) + C
f = 0s(cra Sf3 + Cys
)
(2.21)
f =s(czsaC a+Cz, 8(,))
smx =-s(cS 0sc,+ 186(sa) +CiS,(r))
8my =jVS(C,..8a +C.,8(8.))
8mz = sl(C6Ic 8P +Cn•3(6a)+ Cn, 8(8,))
2.5 Assembling the Linearized Equations of Motion
The linearized equations of motion are assembled by substituting the equations for
the perturbed forces and moments Eq (2.21) into Eqs (2.15) and (2.16). The resulting
equations are:
=
S
(C,.8a+Cx,,(.a))
+qc 86(8a) +cy(8,))
Si =-uo8,r+ -Sc, +C
(2.22)
&w=u0 q+-LI Cz,5a + C45(5.))
,I=
YsYc a +C
c,8(8.))
=I S
C+
+C
+ C8
+I,(C
((8,)
, P+I(8S))
8a+CCC1z5(4))]
1 6(6r)
In missile autopilot design, lateral and vertical velocity perturbations are often
expressed as sideslip angle and angle-of-attack perturbations. For small angles 8P and
6a, Figure 1.1 shows that
S5v
(2.23)
V
Next, differentiate Eq (2.23) with respect to time and substitute the result into the
equations for 6& and 6i1 given in Eq (2.22). Using the fact that V = uo in the stability
axes system yields
/3+=-r •-
y I +,+Cy8 (3a)+Cra(805))
(2.24)
5= Sq + -'S(Cz a ++ C, (+,)
mV
a
In the following, the 8 used in the equations of motion to mean "small
perturbation" is dropped. It is assumed that the reader is aware of the fact that the
linearized equations of motion hold for only small perturbations about the steady-state
flight condition.
The matrix form of the resulting linearized equations of motion is:
"0 0
0 0
Xa
0 u
O
0
Za
0 1 0 a
Zs,
p
0 L
0
00 0 p
0
0
0
J
0
0
M a 00
Np
0
0
q
0
0
Y6, Y
0
0 0 0-1
0 Y, O
S
"XXBA
0
0
L0
L
8
M 86
0
0
0
N,.
N,
0l r
8sa
(2.25)
8,(
where: the Xi, Yi, Zi, Li, Mi, and Ni are referred to as dimensional stability derivatives.
Their definitions are apparent from inspecting Eqs (2.22) and (2.24).
As shown in the matrix equation, the longitudinal dynamics, defined by
ii, a, and q, are decoupled from the lateral directional dynamics, defined by
/, f, and i. The bank-to-turn autopilot is designed to command body-normal
acceleration and to roll the airframe about the velocity vector. The decoupling of the
missile dynamics allows the normal acceleration command autopilot to be designed apart
from the roll-yaw roll-rate command autopilot [9]. In this thesis, only the normal
acceleration autopilot design is considered.
2.6 Open Loop Dynamics for the Normal Acceleration Autopilot Design
For the normal acceleration autopilot design, the phugoid motion of the missile is
ignored [12]; therefore, the it equation is dropped from the longitudinal dynamics. The
resulting pitch state dynamics are
a= Zaa+q+Z•6
(2.26)
•
4 = Maa + M,6 ,
2.6.1 Actuator Model
The control surface actuator dynamics for
6
e
are modeled by the following second
order differential equation [9]:
5,+ 2CcSe + w2•2,
= 02
(2.27)
where ý is the damping ratio, o is the natural frequency, and 86 is the fin command.
2.6.2 Normal Acceleration
Normal acceleration denoted as Az can be calculated from
A = V, + w, x V,
(2.28)
where V, is the missile velocity in the stability axes system and mo, is the angular velocity
of the stability axes system with respect to inertial. Since the linearized equations of
motion Eq (2.25) were developed for a steady state flight condition, iV,= 0. As shown in
Figure 2.1, the angular velocity of the stability axes system with respect to an inertial
frame is o, = [0 j
0 ]T
; where, the flight path angle, y, is defined as y = 0- a. The
information given above is substituted into Eq (2.28) to obtain the following equation for
the normal acceleration:
A,= -u 0 = V(de- e)=v(za +Z,,)
(2.29)
where:
* V=uo in the stability axes system
S0 = q for the linearized pitch dynamics
Eqs (2.26), (2.27), and (2.29) are used to assemble the open loop dynamics for the
normal acceleration autopilot design. The resulting state equations are:
-250 -_2 0
0
0
0
0
Mb
Z,
0 Ma
1 a
y =[O VZ.3
0 VZcax
6C
where:
*x= P
* U-=
0
1
e q
ec
a]
o2
0
0
0(2.30)
The flight condition studied in this thesis represents a trim angle-of-attack of 14
degrees, Mach 0.8, and an altitude of 4000 feet. The following parameters are the
nominal values of the dimensional aerodynamic stability derivatives: Za= -1.2507 (l/s);
Z6 = -0.21198 (l/s); Ma = 15.009 (1/s2 ); and M6 = -103.7500 (1/s2 ). The sign of Ma
determines the stability of the open loop airframe. When Ma is positive, the airframe is
unstable. This occurs when the aerodynamic center-of-pressure is forward of the centerof-gravity. The remaining system parameters are missile velocity, V = 886.78 (ft/s) and
fin actuator damping and natural frequency C= 0.7 and w = 113.0 (rad/s), respectively.
The transfer function matrix from the fin command to normal acceleration Az is:
Az_
6C
( 2V(ZS
2
+ ZaM, - Z , Ma)
(2.31)
(s - Zas- Ma)(S2 +2(Ls + C2)
Note that the acceleration transfer function contains a right-half-plane (RHP) zero. This
nonminimum phase relationship results from the missile fin deflection initially producing
a lift force in the direction opposite to the command. The moment due to the fin force
causes the airframe to pitch, creating an acceleration as commanded. This phenomenon
is observed in the acceleration response as an initial undershoot in the time history [1].
Chapter 3
H.. State Feedback Control
3.1 Introduction
This chapter details the design of an H.. full state feedback controller for a
normal acceleration command missile autopilot. To design the controller, Theorem 3.2 of
[2] was used. This theorem states that a stabilizing controller exists such that the closed
loop system has an H.. norm less than some y> 0, if and only if there exists a positive
semidefinite solution to a certain algebraic Riccati equation. The salient feature of this
theorem is that it generalizes the results given in [3]. In [3], the output matrices, defined
by z=Clx+D
12u,
are assumed to be of the following form: DT2[C 1 D12]=[0 I].
This assumption says that 1) Czx and D12u are orthogonal so that there is no cross
weighting between the state and the control weight matrix in the performance index, and
2) the control weight is normalized and nonsingular. While this assumption is made only
to facilitate the proofs, it is restrictive in terms of design. In [2], Stoorvogel allows the
output to be of the form z=Cx +Dju+ D2w, where the only assumption made
concerning the output matrices is that D 1 is injective.
Section 3.2 presents Theorem 3.2 of [2]; Section 3.3 gives an informal proof of
the theorem; Section 3.4 discusses the H. state feedback algorithm used to design the
normal acceleration command autopilot; and, Section 3.5 presents the results of the
autopilot design.
3.2 H. State Feedback Theorem
Consider a linear, time invariant system of the following form
(3.1)
i= Ax+Bu + Ew
z = Cx + Dlu + D2w
9 ' is the control input, w(t) e W9 is the exogenous
where x(t) e W" is the state, u(t) e %
input (i.e. disturbances, commands, etc.), and z(t) r 9q is the output to be controlled.
The matrices A, B, E, C, D1, and D2 are of appropriate dimensions.
Theorem 3.1 (Reference [2])
If the transfer function from w to z is denoted as T, and if the system in Eq (3.1)
is subject to the following assumptions:
1) (A,B, C, D 1) has no zeros on the jwo axis
2) (A,B) is stabilizable
3) D1 is injective (i.e. (DT4D) -1 exists)
then, the following are equivalent:
i) There exists a state feedback control law u = Kx such that the resulting
closed loop system is internally stable and
IITw ll.
< '-
ii) DID 2 < y 21 and there exists a P 2 0 that is a solution to the following
Algebraic Riccati Equation (ARE)
Arp+PA+CTC-[
2-r
P T+DCi D TD,DD
B'P+DC
(3.2)
If P satisfies the conditions in part (ii), then a controller satisfying the conditions
in part (i) is defined by
K=-D1 (
-
y2 2D
)[T
DT
C+BTP +D D2(yi - DID 2 (TC+E P)] (3.3)
Remarks:
i) If DD
2=
0, then
K = -(DI DI)-'[DTC + BTP]
(3.4)
In the case of D'D 2 =- 0, we can relax the injectivity requirement of D 1 and assume only
that (DIDI)- exists [1]. The role of DID
1
is similar to that of the control weighting
matrix in the LQR problem. A small D 1 indicates cheap control. This matrix is chosen
by the designer in the design of weighting functions for the regulated variables, z.
ii) The requirement that D'D, < y 21 is obvious since state feedback will not change the
H.,, norm of T., which is bounded below by the norm of DrD2. Intuitively, state
feedback is used to internally stabilize the system without making the norm too much
worse than the norm of D D2.
3.3 Informal Proof of Theorem 3.1
The proof given in this section is intuitive and is not meant to be rigorous. Its
purpose is to give the reader insight into the derivation of both the ARE Eq (3.2) and the
controller Eq (3.3).
In terms of H, design for "real world problems", theses two
equations are the most important aspects of Theorem 3.1.
In deriving Eq (3.2) and Eq (3.3), a differential game approach is used. The
structure of the differential game considered in this section is discussed below.
Given a cost functional of the form
J(u,w) = I'ZTz - y2WTw]dt
(3.5)
to
where:
z = Cx +Du+D2w
Subject to the following constraints:
xi= Ax + Bu + Ew
(3.6)
to and x(to) are fixed
tf and x(t)are free
Find uO and wo such that
J(uo,w) 5 J(UO,WO) 5 J(U, W
(3.7)
Remarks:
i) Eq (3.7) is known as the saddle point condition.
ii) Substituting the definition for z into the cost functional shows that the control u wants
to minimize J(u,w) and the exogenous input w wants to maximize J(u, w).
iii) Intuitively, the relationship between the differential game given above and the H.
control problem is as follows:
The H. norm can be defined as
{4 }(3.8)
sTu1.
=S
For any w,
II•U
j12 12.1wll
I1211w
Pick a yr
(3.9)
IITTll.
This yields,
- r211wl I<0
II12|z
(3.10)
Now, look at the cost functional, Eq (3.6). The cost, J, can be rewritten as
j= IIIzl - yr21 wI
(3.11)
From Eq (3.10) we know that Ilz112 - r211wl1 5 0. Therefore,
2>lwl42
(3.12)
Using Eq (3.12), it is also true that
y 2 sup Z
wl2= II 12
(3.13)
Substituting the definition for the H. norm into Eq (3.13) gives
y rUTZW.
Note: when y = Ymin, ymin = llTwll.
(3.14)
The crux of the matter is that the H.. norm of the closed loop transfer function is
minimized by solving the differential game characterized by Eq(3.5), Eq (3.6), and Eq
(3.7) for the smallest allowable y.Obviously, the solution procedure involves iterating
over yto find 7min and its associated controller. An algorithm for calculating
}lnin
and its
associated controller is given in the next section.
iv) The structure of the informal proof is as follows: 1) Use first order necessary
conditions for maximinimizing J to derive expressions for the ARE Eq (3.2), uo and wo,
and the controller, K, Eq (3.3). 2) Use second order necessary conditions to show that the
expressions for uO and wo can satisfy the saddle point condition Eq (3.7).
3.3.1 First Order Necessary Conditions
Given the differential game described by Eqs (3.5), (3.6), and (3.7), substitute the
equation for z into the cost functional J and collect terms. The result is:
J =1
2
xTCTCx + 2xTjC'TD
C
[wJDID,
wUD,
][W +
DID
2
DTD D D_-y2 I
d- (3.15)
Define the following expressions to simplify Eq (3.15):
SE[CTD 1
R DTD,
[-DD,
CTD 2]
(3.16)
DTDz 2 2
DTD2 - y I
w]T
r,[u
Using the definitions in Eq (3.16), the cost functional Eq (3.15) takes the form
J =ixrCCx +2xSi
+ rT+RiRdt
(3.17)
to
Next, adjoin the differential equation constraint given in Eq (3.6) to the cost functional in
Eq (3.17) using the costate vector p(t). The resulting augmented cost functional is given
below.
T
+ pT(Ax+
xTCT Cx +2xTSii +TRi
Ja=
i
(3.18)
-
go
where:
AE[B E]
For the augmented cost functional Ja to have an extremum, the fundamental theorem of
the calculus of variations says that the first variation of Ja, denoted as &.a,
must equal
zero [4]. Calculating the first variation of Ja Eq (3.18) gives
(3.19)
R+pTB]ai
= [xC'C+ &ST + p'A]x + [xTS + EiR
&a
i- ]-p',
+ ,p'T[Ax+
dt+ [g(x, ,t)+p' (a(x, i,t)- i)](t)St,f
where:
(3.20)
g(x,,i t) - XTCTCx + 2TSi + R
a(x,5,t) - Ax + Bi(
Next, integrate the pTST
&a =-p'(t, )8x(t,)
term by parts and simplify. This yields
+ {[xTCrC + TST r + prTA + pT]Sx + XTrS + iTR + pTB]sf
(3.21)
to
+
pT[Ax+ B-
]dt
+[g(x,
,t)+
pT (a(x, R,t) -)](tf
)6t
the 8x(tf) term in Eq (3.21) depends on tf. A linear approximation of this dependence is
as follows [13]:
(3.22)
6x(tf) =6Xf - i(tf)8f
Substituting Eq (3.22) into Eq (3.21) and simplifying gives
&a=-p'(t,)5x, + {[xTCC +iiTS +pT A+p x +[X'S +&'R+pTA•]s
T[Axx++
B-idt
+ [g(x,, t)+ p' (a(x,A,t))](tf)St
(3.23)
At this point, the necessary conditions for al = 0 can be established. Applying the
fundamental lemma of the calculus of variations to the integral term in Eq (3.23) results
in the coefficients of 8x, sii, and 6 p being equal to zero independently.
Since
8xf and St, are arbitrary variations, their coefficients must also equal zero for
a==0.
The resulting necessary conditions for
= 01,
0 are summarized below.
x = Ax + Bii
(3.24a)
X(to)= Xo
(3.24b)
p = -CTCx - ATp - Sii
(3.24c)
p(tf)= 0
(3.24d)
[g(,ii, t)+ pT(a(x,i, t))](tf) =0
(3.24e)
ii= -R-'(B p + STx)
(3.24f)
3.3.1.1 The ARE
The method used to derive the ARE given in Eq (3.2) is based on a discussion of
Riccati equations given in [14]. First, substitute the expression for fi given in Eq (3.24f)
into the equations for the plant dynamics and the costate dynamics Eqs (3.24a) and
(3.24c), respectively.
The resulting matrix equation shown below is known as a
Hamiltonian system.
[
[ A - R-'ST
-CCTC +SR-IST
bR-bT
-A] +SR-[1•
x
(3.25)
p
This matrix equation is a linear, homogenous differential equation; therefore, we can find
a transition matrix of the form:
(tft) -,(t,,)
su(ch, ) f=LO(,,.)
0=.(t)
such that
(3.26)
(3.27)
p(t) = x+ ~,p
Using the boundary condition on p(tf) given in Eq (3.24d), Eq (3.27) can be rewritten as
(3.28)
p =-1x.x
P
Now, differentiate Eq (3.28) with respect to time
(3.29)
p = Px + Px
Substituting the expressions for the plant dynamics and the costate dynamics given in Eq
(3.25) into Eq (3.29) results in:
(-CTC + SR-'S)x + (-A + SR-'BT)p = Px + P(A-
R-'ST )x- P(AR-'AT)p
(3.30)
Using Eq (3.28), the costate dynamics can be eliminated from Eq (3.30). Making this
substitution and collecting terms gives
(P+PA +ATp +CTC -
SR~S
-SR-'Tp
p, 6 =0
PbRST -P•P)x
(3.31)
For Eq (3.31) to be true for all x, the expression in parenthesis must be zero. This results
in the following Riccati differential equation:
PA + AP + CTC - [P + S]R-' [Bp + ST]-P
(3.32)
The boundary conditions on p(tj) and x(t1 ) coupled with Eq (3.28) allow the following:
(3.33)
lim P = constant (= 0) -- lim P = 0
Since our purpose is to design a controller for a steady state flight condition, Eq (3.33) is
justified. With Eq (3.33), the Riccati differential equation given in Eq (3.32) can be
reduced to the algebraic Riccati equation given below.
PA + ATP + CTC - [PB+ S]R- [P
+ T] = 0
(3.34)
Now, substitute the definitions for S, R, and h given in Eqs (3.16) and (3.18),
respectively, into Eq (3.34). As shown below, the resulting ARE is the same as that
given in Theorem 3.1.
SB'P +DC
ATP + PA + CTC -
T
D[T D
D[D2
BTP + DfC
D2TD
y 2 ][ TP + IC =
2
E+P+D C L , DID,-fl
TP + DIGTC
D
EkP+D C
(3.35)
3.3.1.2 The Optimal Control, the Optimal Exogenous Input, and the Controller
The next task in the informal proof is to derive the expressions for uo and wo
given in [2]. First, note that ii, Eq (3.24f), contains both the optimal control and the
optimal exogenous input. Furthermore, each is expressed in terms of the state and
costate. Using Eq (3.28) to eliminate the costate from i~yields
(3.36)
•i = -_R- (Tp + ST)x
Expanding Eq (3.36) using the definitions for R and S, Eq (3.16) gives
DGx
ET'P +
[DID
CI
+D
D 2•-- y2l J LE'P
Di Dr DroD
(3.37)
Now, the trick is to calculate G(1,1) and G(2,1) to separate uo from wo. To do this, we
must expand R-1, shown in Eq (3.37). This is done as follows:
-1
G
,i
[
I
-DTD, (DiTD,
M
0B
I
TP
+DT C]
(3.38)
ElTP + DLCJ
Note: the(DITDl)-' term of M in Eq (3.38) exists because of the injectivity requirement
on D 1. Furthermore, M-1 exists because of the identity matrices along the diagonal.
Carrying out the inverse operation and the multiplication in Eq (3.38) gives:
BP +DTC]
1]D (D)
G= [(DDIo)-' -(DDI )' DDIW
0
W-
-DDI(DITDo)-'(BT'P +DIC) +(EP +D2 C)
(3.39)
where:
D)-1DLD 2 +DDW=-D4Dj (DD
yT21
By substituting G from Eq (3.39) into Eq (3.37) and carrying out the multiplication, uO
and wo can be obtained. The results are as follows:
_[-D2•.(D;r
.= -w-'
Sj_ (j~TI
)1(BTP+ rc)+(E• P+ D2TC)]}x
-1(BP +TC)+ (DDi)-' DD2W-, [D
i2
(3.40)
(DTD )-I
These equations for the optimal control and the optimal exogenous input match the
corresponding equations given on page 53 of [2]. Note that the resulting uo is in the form
of a state feedback control law as dictated by Theorem 3.1. The expression for the static
controller, K, is also given in Eq (3.40). While this expression "looks" different than that
given in Theorem 3.1, simulation shows that both give the same gain matrix.
3.3.2 Second Order Necessary Conditions
The last step in the informal proof is to show that the equations for the optimal
control and the optimal exogenous input, Eq (3.40), satisfy second order necessary
conditions for a saddle point. The method used is based on the discussion of differential
games given in [15]. According to [15], the following second order conditions must be
satisfied for a saddle point:
H, 2 0
H
<5 0
where:
H is defined as the Hamiltonian, and the superscript "o" means that the
second derivative is evaluated at optimal.
(3.41)
The Hamiltonian for the augmented cost functional given in Eq (3.18) is
(3.42)
H= 2(g(x,f,t)+ pTa(x,,t))
where:
g and a are defined in Eq (3.20)
Calculating H, and H, for the Hamiltonian defined in Eq (3.42) yields:
HL, = DTD1
Obviously,
and
T
Ho, = DD
2
y 2i
(3.43)
D>ŽDT
0. Furthermore, DTD
1 1 0 because of the injectivity requirement on
D1. As a result,
TDD
> 0, and the first condition of Eq (3.41) is satisfied. As discussed
in Section 3.2, DrD2 < y 21; therefore, D2TD 2 - y2 1 < 0, and the second condition of Eq
(3.41) is satisfied. Consequently, the expressions for uo and wo satisfy second order
necessary conditions for a saddle point.
In the previous paragraph, we actually showed that Hou >0 and Ho, < 0. These
happen to be two of the second order conditions required for sufficiency. However, they
are not the only conditions that must be satisfied for sufficiency. Reference [15] develops
the second order sufficient conditions for a weak local minimum for an optimal control
problem. An analogous development could be made for the differential game considered
here, but this is beyond the scope of this thesis.
To reiterate, the proof given in this section is not meant to be rigorous; its purpose
is to give the reader insight into the H. state feedback control problem. Issues such as
the existence and solvability of the ARE, the existence and uniqueness of u o and wo, and
the development of second order sufficient conditions for the saddle point have not been
addressed. A formal proof that addresses all of these issues is given in [2].
3.4
H. State Feedback Design Algorithm
The purpose of this section is to discuss the algorithm used to design the H.. state
feedback controller for the normal acceleration command missile autopilot.
The
algorithm described in this section is similar to the one used in [1]. The difference
between the two algorithms is that the one presented in this section does not assume
DTDz = 0. A block diagram of the algorithm is shown in Figure 3.1. Referring to
Figure 3.1, both the flight condition and a state space model of the open loop missile
dynamics, Eq (2.30), were established in Chapter 2. This section will address selecting
the weighting functions and forming the augmented plant. Appendix A discusses solving
the ARE, Eq (3.2). The next section presents the numerical and graphical results of the
missile autopilot design.
Figure 3.1 Block Diagram of the H. State Feedback Algorithm Used in the Normal
Acceleration Command Autopilot Design
3.4.1 Weighting Function Selection
The plant and controller structure used to design the H. state feedback controller
is shown in Figure 3.2. The performance objectives are to shape the sensitivity S(s) in
order to follow acceleration commands, to shape the complementary sensitivity T(s) to
roll off the plant, and to minimize the control activity C(s). As shown in Figure 3.2, this
defines the z vector to be
z=[Ws(s)S(s) WT (s)T(s) Wc(s)C(s)]T
(3.44)
Control Weight, Wc
-
--
z
Figure 3.2 Augmented Plant and Controller Structure
Figure 3.2 Augmented Plant and Controller Structure
The weights We(s), Ws(s), and WT(S) are chosen to shape these functions using low order
transfer functions (to minimize the order of the compensator).
Without loss of generality, the control activity for the missile autopilot design is
defined as the fin angular acceleration, 8, instead of fin command, 3 c, as suggested by
Figure 3.2. To penalize the control activity, a constant weight with magnitude WC(s) =
0.1 was chosen.
In selecting Ws(s) and WT(s), [16] examined 1st, 2nd, and 3rd order transfer
functions. The final selection used was a 1st order transfer function. Reference [16]
found that the higher order weighting functions yielded closed loop designs with lower
input-output stability margins with no significant improvement in command following.
Consequently, in this thesis the form of the weighting function used for both the
sensitivity weight and the complementary sensitivity weight is as follows:
(3.45)
W(s) = k(•rs + 1)
('r2S+ 1)
For each weighting function, Ws(s) and WT(S), the parameters tl, r2, and k are
calculated by specifying a high frequency weight, a low frequency weight, and a
bandwidth. The equations for Tl, t2, and k in terms of the weights and the bandwidth are
given below.
k=k
1
9l-COBW
k2T
1
1
kiT
2- k-1
(3.46)
where:
* kl is the low frequency weight
* kh is the high frequency weight
* co)w is the bandwidth (rad/s)
The advantage of designing the weighting functions in this manner is that the bandwidth
of the weights can be specified by the designer. For the sensitivity weight, the low
frequency weight kl dominates the location of the pole %
2 , and the high frequency weight
kh dominates the location of the zero 1l. Likewise, for the complementary sensitivity
weight, the low frequency weight dominates the location of the zero, and the high
frequency weight dominates the location of the pole.
A caveat in designing the weighting functions is being too "ambitious" in
selecting kj, kh, and cnw. The phrase "too ambitious" will be illustrated for the missile
pitch dynamics by showing that placing the pole of the complementary sensitivity weight
too far in the left half plane results in degradation of augmented plant controllability.
This, in turn, can lead to numerical problems when trying to solve the ARE, Eq (3.2).
Controllability of the augmented plant will be determined by calculating the
eigenvalues of the controllability Grammian. According to [17], if these eigenvalues are
strictly positive, then the system is completely controllable.
The controllability
Grammian, denoted as We, is determined from the following Lyapunov equation:
(3.47)
AaWc+ WcA +BaB=0
where We exists only if Aa is stable.
Using Eq (3.47), we can investigate how the pole selection for WT(s) affects the
controllability of the augmented plant. According to Figure 3.1, the augmented plant is
defined by specifying a flight condition and the weighting functions. The state space
matrices needed for Eq (3.47) are found from Eq (3.52). Since Aa needs to be stable to
calculate We, the flight condition given in Chapter 2 cannot be used (the Ma given in
Chapter 2 is positive). Instead, consider the following flight condition: a trim angle-ofattack of 10 degrees, Mach 0.8, and an altitude of 4000 feet. In this flight condition, the
nominal values of the dimensional aerodynamic stability derivatives are: Za = -1.1095
(l/s); Z3= -0.19171 (l/s); Ma= -39.570 (1/s2 ); and M 8 = -93.794 (1/s2 ). For the
weighting functions, consider
Sensitivity Weight
kt = 5.0 x 105
Complementary Sensitivity Weight
k, =0.175
kh = 0.82514
kh = 900
OBW = 10
coBW = 16
Under these conditions, the eigenvalues of We were found to be
2.0688 x 1011
5.1535 x 105
4.0200 x 103
9.7540 x 101
3.9794 x 101
3.0090 x10 -9
(3.48)
Because Ai(W)= 10- 9 = 0, the augmented plant is on the verge of being
uncontrollable. In terms of solving the ARE Eq (3.2), the conditions given above define
a poorly conditioned problem. It turns out that kh of WT(S) dictates the size of Amin(Wc).
By making kh large (i.e. moving the pole of WT(s) further left in the left half plane),
Ain(We) becomes smaller. Hence, "shaping" the complementary sensitivity transfer
function too much can lead to a poorly conditioned problem.
To avoid this problem the following values were chosen for the weighting
functions:
Sensitivity Weight
k = 1.0 x
103
kh =8.2514 x 10-1
OBW = 10
Complementary Sensitivity Weight
k = 1.75 x 10-
kh = 1.0 X102
OBW = 16
(3.49)
Using Eq (3.49) along with Eq (3.46), k=1000, 1i=0.14606, and '2=177.01 for
Ws(s), and k=0.175, t1=0.35165, and 2--0.61539 x 10-4 for WT(S). The frequency
responses of these weighting functions are shown in Figure 3.3.
Frequency (rad/s)
Figure 3.3 Weighting Function Frequency Response
3.4.2 Forming the Augmented Plant
The state space realization of the augmented plant can be determined from Figure
3.2, keeping in mind that the control penalty is on the fin acceleration. The result is as
follows:
A
0 0
ia = -BsC
-DsC, Cs 0
= D/TC, o c,
WcCcAP
w
O
BLPD,
0 ATJ
BC,
0
0 Xa + -BsDp u+IB
As
P
B
x+
O0
-DsD,
[Dsl
DTDp u+ 0 w
(3.50)
WcCcBp
Dl a
Ca
D2a
where: Cc is used to form S from the
plant states
Ya = Xa
where: the augmented state xa includes the missile states and the weighting states; the
control input u is the fin command, Sc; and the exogenous input w is the acceleration
command, A.,
The numerical values of the state space matrices for the augmented missile plant
are
4
4
-L5820 x102 -L2769 x10
0
0
0
0
L0000 x100
0
0
0
0
0
2
-L037Sx10
0
L5009x10'
0
0
0
0
0
-2.1198x10
1.0000x10
-1.2507x10
0
0
2
-3
-L8798x10
0
-Il091x10
-. 6493 x10
0
0
2
3
0
-1.8798x0
0
-L091xl0
0
-L6250x10 3
1.2769 X10
0
C-
0
-L5820x10
2
-L5511x10
-L8798x104
-1.2769x10
0 -9.1516x10
0 -L1091xlO
0
0
2
5.6446x10
0
0
0
0L=
-L6222x10
0
1
D,=
0
0
0
0
0
0
0
0
1.270x10
0
0
0
-1
0
0
4,=
-8.2514x10',
0
0
(3.51)
3.5 Design Results
The purpose of this section is to present the design results of the normal
acceleration command missile autopilot design using the H. state feedback algorithm
discussed in Section 3.4. Referring to Figure 3.1, the outputs of the H.. state feedback
algorithm are Ymin, the state feedback gains, K, the closed loop pole locations, time
domain metrics (i.e. performance results), and frequency domain metrics (i.e. stability
robustness results).
3.5.1 Ymin, the H. State Feedback Gains, and the Closed Loop Poles
As shown in Figure 3.1, Ymin is calculated using a binary search. The binary
search procedure used is described below.
1. Set ymax.
2. Set Ymin.
3. Is 7max - Ymin < tolerance? If yes, then stop. If no, then
continue.
4. Set y = (Ymax + Ymin)/ 2 .
5. Form A, B, Q, and Ri (Eq (A7) and Eq (A9)) using
the augmented plant equations (Eq. 3.51).
6. Use the MATLAB command "aresolv" to solve the ARE
given in Eq (A15).
7. Is P _0 and is ACL stable? If yes, then goto 8. If no,
then goto 9.
8. Set ymax = y and goto 3.
9. Set Ymin = y and goto 3.
This result means that
Using this procedure, Ymin was calculated to be 1.2310.
ITzw,.
rmyin where T, is the closed loop operator from the exogenous input vector, w,
to the output vector, z.
As shown in Section 3.3.1.2, the H. state feedback gains, denoted by the matrix
K, are calculated according to the following equation:
K = (D
BTP + ,C)+(1
f
DW [
(
BA'P
T)
(.
+
(3.52)
where:
*P is the solution to the ARE Eq (A15) for y = Ymin.
* w= Da
(TDia) )Dz.)
-
-y2-
(from Eq (3.39))
The constant gain matrix for the missile autopilot design is shown in Table 3.1.
The closed loop A-matrix for the augmented missile plant is formed as follows:
ACL
=
(3.53)
Aa - BaK
Note that wo is not used to form ACL. This is because the designer has no control over the
exogenous input. The purpose of H. optimal control is to determine uO given some
information about w. In this context, the only information we are given is that w tries to
maximize the cost functional Eq (3.5). The eigenvalues of ACL are also listed in Table
3.1.
Table 3.1 H. State Feedback Gains and Closed Loop Pole Locations
State Feedback Gains, K
Closed Loop Eigenvalues
1.0065E+O
-1.2831E+4
1.7974E+2
-1.6209E+3
-1.2224E+2
-7.6215E+1
-
2.8443E+lj
-2.1419E+3
-6.5562E+0
9.1802E+0O
-2.4917E+1
-2.7991E+1
3.5.2 Time Domain Results
To assess the time domain performance of the H. state feedback design, the
following performance metrics were calculated for a unit acceleration command step
response [1, 16]: 63% rise time Tr, 95% settling time Ts, percent undershoot %UN,
percent overshoot %OS, maximum control surface angle 68m,
and maximum control
surface rate, ma". These metrics are scaled to reflect a 1G acceleration command input.
A discussion of these metrics is given below. The rise time and the settling time are a
measure of how fast the missile can respond to an acceleration command.
It is
advantageous to keep these values small; however, making them too small usually results
in a larger undershoot, a larger overshoot, and a larger maximum fin rate. The percent
initial undershoot to the acceleration command is a measure of the sensitivity to the RHP
acceleration zero present in all tail controlled missiles. Large initial undershoots are
usually caused by quick fin deflections resulting from changes in acceleration command
magnitude. The percent overshoot is a measure of the damping in the dominant airframe
poles. It is important to keep command overshoot small. The fin angle and fin rate
metrics are critical design parameters. If either fin angle or fin rate saturation occurs, the
missile loses its control capability. The results of the normal acceleration step response
are shown in Table 3.2 and in Figures 3.4-3.8.
Table 3.2 Time Domain Performance Metrics
63% RISE
%INITIAL
95%
SETTLING UNDER-
%OVER-
MAX FIN
ANGLE
MAX FIN
RATE
The maximum fin rate shown in Table 3.2 can be interpreted as follows: A 10-g
normal acceleration command would require a maximum fin rate of 626 deg/s. In terms
of missile autopilot specifications, the maximum fin rate shown in Table 3.2 is
prohibitive. One method of reducing the maximum fin rate is to increase the control
penalty. For instance, changing Wc(s) from 0.1 to 1.0 results in a Ymin of 1.3497, a rise
time of 0.231 s, a settling time of 0.533 s, an initial undershoot of 5.8%, an overshoot of
0.0%, a maximum fin angle of 0.824 deg/G, and a maximum fin rate of 20.0 deg/s/G.
Another means of dealing with the large fin rate is to consider the mixed H2- H..
problem. For this type of design, a y 2 Ymin is chosen to form the state feedback matrix
K. As y -'•co, the design approaches the H2 solution, and as 7 -
yin the design
approaches the H. solution. To illustrate the effect of increasing yon the performance
metrics shown in Table 3.2, consider the missile autopilot design with y = 2 x Ymin. The
results are a rise time of 0.293 s, a settling time of 0.568 s, an initial undershoot of 3.3%,
an overshoot of 0.0%, a maximum fin angle of 0.510 deg/G, and a maximum fin rate of
10.6 deg/s/G.
-1
0
0.2
0.4
0.6
0.8
1
Time (sec)
Figure 3.4 Normal Acceleration Response to a Unit Step Acceleration Command
IA
7U
60
50
40
30
20
10
0
-10
-20
3.
A
,,
0
0.2
0.4
0.6
0.8
1
Time (sec)
Figure 3.5 Fin Rate Response to a Unit Step Acceleration Command
0
0.2
0.4
0.6
0.8
1
Time (sec)
Figure 3.6 Fin Angle Response to a Unit Step Acceleration Command
1.2
0
0.2
0.4
0.6
0.8
1
Time (sec)
Figure 3.7 Pitch Rate Response to a Unit Step Acceleration Command
0
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
Figure 3.8 Angle of Attack Response to a Unit Step Acceleration Command
3.5.3 Frequency Domain Results
To study the stability robustness of the H. state feedback design, the following
frequency domain metrics were considered: classical gain margin GM and phase margin
PM, loop gain crossover frequency LGCF, and min(aon(I+ 1-)). In additon, to study
the command following and disturbance rejection properties of the design, the loop
transfer function from the error signal to the plant output was used to plot the
complementary sensitivity transfer function and the sensitivity transfer function. Finally,
a plot of oam(T,) vs frequency was used to verify
IITll, 5 Ymin.
The classical gain margin is defined as the amount of gain that can be allowed to
increase in the loop transfer function (measured from the plant input) before the closedloop system reaches instability. Similarly, the classical phase margin indicates the effect
on stability due to changes of system parameters, which may alter the phase of the loop
transfer function. Both the gain and phase margins for the missile autopilot design were
calculated from the Nyquist loci shown in Figure 3.9. To construct the Nyquist loci, the
loop transfer matrix from the actuator input was used. This transfer matrix is denoted as
L, and is defined by
L(jw) = K(jwl - Aa)-Ba
(3.54)
The Nyquist loci encircles the point (-1 Oj) once because of an unstable pole present in L.
Because the normal acceleration command autopilot represents a SIMO system,
the loop gain crossover frequency was found by calculating the frequency for which
IL(jw) = 1. This defines the bandwidth of the system. To keep from exciting high
frequency unmodeled dynamics, the bandwidth of the design cannot be too high.
The parameter min(min (I+ ) ) represents the smallest multiplicative error
reflected at the plant input that can destabilize the system. This metric is typically used
as a way to quantify stability robustness for MIMO systems.
Table 3.3 summarizes the frequency domain performance metrics. Figures 3.10
and 3.11 show plots of L(jo) vs frequency and an (I + L-) vs frequency, respectively.
Table 3.3 Frequency Domain Performance Metrics
LOOP
GAIN
PHASE
GAIN
MARGIN
MARGIN
FREQ.
m•n
I.
r--'V
The LGCF shown in Table 3.3 is prohibitive in terms of implementation and is
characteristic of H.. designs. As shown in [1], a typical LGSF for a normal acceleration
command missile autopilot is on the order of 30 rad/s. The implication of the LGCF in
Table 3.3 is a prohibitively high digital implementation rate for the control law. Two
possible explanations for the high LGCF are 1) that H.. designs are not required to be
strictly proper (the weighting functions help remedy this problem) and 2) that H..
designs use the increased bandwidth for control effort to counter the worst case
exogenous input wo.
A popular means of dealing with the high LGCF associated with H. designs is to
consider the mixed H2 - H, problem discussed in Section 3.5.2. To illustrate the effect
of increasing y on the performance metrics shown in Table 3.3, consider the missile
autopilot design with y = 2 x yrin. The results are a LGCF of 20.3 rad/s, a gain margin
of -12.9 dB and +8.3 dB, a phase margin of 34.0 degrees, and a omin( + L-1)-0.555.
Consequently, the magnitude of y is linked to the LGCF. The advantage of the mixed
H2 - H. approach is that the autopilot design can be tailored to meet a LGCF
specification.
Command following performance and disturbance rejection properties of the
missile autopilot design were evaluated using the loop transfer function from the error
signal to the plant output. This loop transfer function, denoted as G, was determined
from Figure 3.2. The result is shown below.
G=-(I +GG )-1I,G
(3.55)
where:
Gp
, (s)=C, (sI - A,+BpKp)l B
GT (s)=KT(sI - AT)-" Br
Gs(s) =Ks(sI - As )-Bs
Using G (s), the corresponding complementary sensitivity and sensitivity transfer
functions were evaluated. These transfer functions are defined as T(s) = G(s)(I + G(s))-'
and S(s)= (I + G(s))- ', respectively. To assess command following performance and
disturbance rejection, plots of T(s) and S(s) were calculated. The results are shown in
Figure 3.12.
Finally, a plot of am (Tz,) vs frequency was used to verify that IITzwLL
Ymin
This plot is shown in Figure 3.13. As shown in this figure, the H., norm of the closed
loop operator for the missile autopilot design is indeed less than or equal to 1.2310.
Real
Figure 3.9 Nyquist Plot
Frequency (rad/s)
Figure 3.10 Loop Transfer Function, L
Frequency (rad/s)
Figure 3.11
min (I + L- 1) vs Frequency
r0
0
Frequency (rad/s)
Figure 3.12 Complementary Sensitivity and Sensitivity Transfer Functions, T and S
I)
104
10-3
10-2
10-1
100
101
102
103
104
10J
Frequency (rad/s)
Figure 3.13 Maximum Singular Value of the Closed Loop Operator, T.
Chapter 4
H. Full Information Feedback Control With
Zeros on the Imaginary Axis
4.1 Introduction
This chapter discusses H. full information feedback control for a normal
acceleration command missile autopilot design when (Aa,Ba,Ca,Di,) has zeros on the
imaginary axis. In terms of transfer function matrix notation, (Aa,Ba,Ca,D) represents
the transfer function matrix from the control u to the output z. This transfer function
matrix is denoted as Pzu. When ADa is 0, Pzu is strictly proper and at least one zero will
exist on the imaginary axis at infinity. This is the scenario considered in this chapter.
Under the above scenario, the H, full information feedback controller is
designed as follows: (1) transform the state space representation of the plant using a
bilinear transformation of the s-plane; (2) design an H. controller for the transformed
system; and (3) perform the inverse transformation on the state space representation of
the control law given in (2). This design methodology is referred to as frequency domain
loop shifting and is based on [2] and [4]. To retain a static feedback structure, [2] claims
that this method is applicable for the full information feedback case. For the state
feedback case, transformation results in a measurement feedback problem. Since this
thesis is concerned with static feedback, we assume full information. For the normal
acceleration command missile autopilot, the exogenous input, w, is the commanded
acceleration, Azk (which can be fed through to the controller); therefore, a full information
controller is not unrealistic.
Section 4.2 discusses how imaginary axis zeros cause problems in H. design;
Section 4.3 shows how imaginary axis zeros can appear in missile autopilot design;
Section 4.4 discusses the algorithm used to design the H. full information feedback
controller in the presence of imaginary axis zeros; and Section 4.5 presents the results of
the autopilot design.
4.2 Why Imaginary Axis Zeros Cause Problems in H. Design
The purpose of this section is to use model matching examples to show that an
augmented plant with imaginary axis zeros results in an ill-conditioned H. problem.
The context of the discussion will be the H. static feedback case where the assumption
that (Aa,SCa,,DI.) (i.e. Pzu) does not have imaginary axis zeros is violated. For the
model matching examples, we use the case where Pzu has zeros at infinity on the
imaginary axis; however, the results can be generalized for any zeros on the imaginary
axis. The material for this section is based on [18] and [19].
Consider the block diagram shown in Figure 4.1.
Figure 4.1 A General Plant-Controller Interconnection
where: P is the augmented plant, K is the controller, w is the exogenous input, z is the
output to be controlled, u is the control signal, and y is the input to the controller. The
purpose of the model matching problem is to calculate a Q such that the following
condition is satisfied:
min P - PzuK(Py,K- I) 1Pyw
(4.1)
The following examples are used to illustrate the effect of imaginary axis zeros on
the model matching problem given in Eq (4.1): Example 4.1) Pzw has one imaginary axis
zero at infinity and Pzu has no imaginary axis zeros; Example 4.2) Pzw has one imaginary
axis zero at infinity and Pzu has two imaginary axis zeros at infinity; and Example 4.3)
Both Pzw and Pm have one imaginary axis zero at infinity .
Example 4.1
1
s+3
Let P.,(s)= - Pu(s) = +3 and P(s)= 1
s+1
s+2a
(4.2)
Substituting Eq (4.2) into Eq (4.1) yields
(4.3)
s+3
min 1
QeRH.s+1 s+2
L
Carrying out the minimization operation in Eq (4.3) results in
s+2
Q(s) =
(4.4)
(s+3)(s +1)
y=0
Hence, an optimal Q for this model matching problem exists. This is to be expected since
Pzu is proper.
Example 4.2
1
1
, and P(s)= 1
Pzu(s)=
Let P,(s)= S
s+1'
(s+1)2
(4.5)
Substituting Eq (4.5) into Eq (4.1) yields
. 1
QeRH.. s+1
(4.6)
1
(s+1)2Q(s
It is claimed that the result of this minimization is y = 0. To show this,
+1
e> 0
Let Q(s)= s +;
(4.7)
es+1
Then,
min
QeRH.. S+1
(S+1)2
Q(s)
=min
(S+1)(ES+1)
(4.8)
Thus, Pm - PzuPIL can be made arbitrarily small. However, y was defined as the
minimum. Therefore, y5 e. Since e is arbitrarily small, y= 0. But, the only way of
achieving y = 0 is if Q(s)= s +1, which does not belong to RH.. Consequently, an
optimal Q does not exist for this example. Note, that in this example Pzu is strictly proper
and has more imaginary axis zeros at infinity than does Pzw.
Example 4.3
Let P~,(s) =
1 , P(s)
12)
and P,~(s)= 1
(4.9)
Substituting Eq (4.9) into Eq (4.1) yields
1 Q(s)
min 1
QeRH. s +1 (s +2)
(4.10)
Carrying out the minimization operation in Eq (4.10) results in
s+2
Q(s) = s+1
(4.11)
y=0
Despite the fact that Pzu has an imaginary axis zero at infinity, we found an optimal Q.
This is because Pzw and Pzu share an imaginary axis zero at infinity. As long as the
number of imaginary axis zeros at infinity for Pzw 2 the number of imaginary axis zeros
at infinity for Pzu, we can find an optimal Q.
For the missile autopilot problem, Pzw of the augmented plant (defined in Eq
(3.50)) is proper, therefore, a situation similar to that shown in Example 4.3 cannot occur.
However, if Pzu of the augmented plant has zeros on the imaginary axis, then an illconditioned H,. problem, as described in Example 4.2, occurs. This explains why
assumption 1) of Theorem 3.1 was made.
4.3 Imaginary Axis Zeros In Missile Autopilot Design
For the reasons cited in the previous section, Theorem 3.1 assumes that Pzu has no
zeros on the imaginary axis. If Pzu is strictly proper, a zero exists at infinity on the
imaginary axis at infinity violating assumption 1) of Theorem 3.1. In order for this
condition to occur, ADa in Eq (3.50) must be zero. The augmented plant equations also
show that if the plant is strictly proper then WC = 0 means that D1 a = 0. Hence, for a
strictly proper plant Wc = 0 means violating the assumption concerning imaginary axis
zeros.
This strictly proper condition can also arise if the weighted control activity,
WcC(s), is defined using the fin rate 8 (see Eq (1)) instead of fin acceleration 8. If the
fin rate is penalized, an integrator is placed in the path between u and z , causing Pzu to
be strictly proper. Thus, assumption 1) in Theorem 3.1 would be violated under these
circumstances.
Engineering specifications for missile actuator design specify limitations on fin
rate. By penalizing S, hardware specifications can be met in the controller design. This
type of specification provides the motivation for studying the H. control with imaginary
axis zeros. For the H. missile autopilot design considered in this chapter, the control
penalty is placed on 8.
4.4 H. Full Information Feedback Design Algorithm
This section discusses the algorithm used to design the H. full information
feedback controller for the normal acceleration command missile autopilot when Pzu has
imaginary axis zeros at infinity. A block diagram of the algorithm is shown in Figure 4.2.
Referring to Figure 4.2, both the flight condition and a state space model of the open loop
missile dynamics were established in Chapter 2. The weighting functions and methods
for solving the ARE and calculating ymin were given in Chapter 3. This section addresses
forming the augmented plant, using a bilinear transformation to transform the augmented
plant, and forming the full information feedback gain matrix, F.
Flight Caditm
a. Mach,
Foun State Space Model
of the Plant
i•,= A,:, +Bu+ E,w
Figure 4.2 Block Diagram of the H. Full Information Feedback Algorithm Used For
Missile Autopilot Design When Pzu Has Imaginary Axis Zeros at Infinity
70
4.4.1 Forming the Augmented Plant
The two differences between the augmented plant used in this chapter and the
augmented plant used in Chapter 3 are 1) the augmented plant in this chapter uses full
information feedback, y = [xa w] ; whereas, the augmented plant in Chapter 2 uses full
state feedback, y = xa, and 2) the control penalty for the augmented plant in this chapter
is placed on S; whereas, in Chapter 3 the control penalty for the augmented plant is
placed on S. The state space realization of the augmented plant used in this chapter is
given below.
AP
0 0
BP
1
i= -BsCp As 0 x+ -BsDp u+ Bs
L
BLjD
O AT,
c,
A
Y=
B
E
x+ 1
-DsC,
(4.12)
Cs 0
z=I DTCp
-DsD,
O C x + DD
O
WcCcA,
J+L
C2
Ds
u+ 0 w
0 J
D21
0Pu+o
D22
where: Cc is used to form S from the
plant states
Remarks:
i) The subscript a notation signifying "augmented" has been dropped. It is assumed that
the reader realizes that the state space matrices refer to an augmented plant.
ii) As in Chapter 3, the control input, u, is the fmin command, 8c; and the exogenous input,
w, is the acceleration command, Az.
iii) Since the open loop missile plant is strictly proper, D 21 of Eq (4.12) is zero. Hence,
(A, B, C2 , )21) has at least one zero on the imaginary axis at infinity. As described in
Sections 4.2 and 4.3, this violates the first assumption in Theorem 3.1.
The numerical values of the state space matrices for the augmented missile plant
are
0
0
-LO375x10'-2.1198xl0 '
-1.8798
x10'
-1.8798x10'
0
1.0000x10
0
0
L0000x1I'
A
0
0
0
0
0
0
0
0
-1.6250x10'
0
1
0
L5009x10
0
-L2507 x10"
4
-L1091x10' -. 6493x10
0
-L1091x10'
0
0
0
0
0
0
0
1.0000 x10
0
0
0
0
0
0
0
0
0
1.0000Ox10
0
Q=
0
0
0
0
-L2769x1o'
-820x10l'
0
0
0
j = 0
0
-
1.0000x10 2
-1.SllxlO'
-L8798x10'
0
0
0
0
1.000O0x1O
0
0
0
0
1.0000 xlO
0
0
0
0
1.0000xlO
0
0
0
0 -9.1516x10'
0 -1.1091x10'
0
0
5.6446x10
0
0
0
0
0
0
-1
0
0
4,=
0
(4.13)
0
0
0
0
0
-1.6222x
10' D
0
0
0
0
0
0
0
0
1.0000x1P
L2769x10'
-1
=
0
a=
-L2514x10']
0
0
4.4.2 Properties of the Bilinear Transformation
The introduction to this chapter mentions using a bilinear transform to transform
the augmented plant as part of the procedure for solving the H, problem in the presence
of imaginary axis zeros. This subsection discusses those properties of the bilinear
transform that are pertinent to H. design.
References [2] and [4] suggest the following bilinear transformation of the
Laplace transform variable s as part of a procedure for solving the H. problem with
zeros on the imaginary axis:
S s+ E
1+where:
E> 0
where: e>O
(4.14)
As shown in Figure 4.3, the function s(S) maps the jw-axis of the s-plane into a circle
of diameter
-
- e in the right-half plane (RHP) of the 9-plane. Note that the RHP of the
s-plane is contained within this circle. The inverse map is
(4.15)
g-E
The inverse map takes the jwo-axis of the 9-plane and maps it into a circle of diameter
1
--
e in the left-half plane (LHP) of the s-plane. Note that the LHP of the
-plane is
contained within this circle.
i-plane
s-plane
'
1-
t•~..
Im
S=T
_
1+ es
jo)-axis of g-plane
...........
C
e
Im
jo-axis of s-plane
SI+Re
Re
ZT
"-T
"'"
Re
:i-
LH irplane
- C
-
KRH s-plane
1
• - e3
Figure 4.3 Bilinear map
Remarks:
i) Under the bilinear map defined in Eq (4.14), all zeros on the imaginary axis in
the s-plane are mapped onto a circle in the i-plane. Therefore, the H. problem can be
addressed in the 9-plane, assuming that no zeros have been mapped on to the imaginary
axis in the 9-plane during the transformation. By synthesizing an H. controller in the
§-plane, the closed loop poles of the transformed system are guaranteed to be stable.
From the inverse mapping, Figure 4.3 shows that the left half i-plane is mapped inside a
circle in the left half s-plane. Hence, the closed loop poles of the original system will lie
1
inside a circle of diameter - - e that is symmetric with respect to the real axis.
ii) Denote the closed loop transfer matrix in the i domain as Tz(S)
. Since this
transfer matrix has all of its poles in the left half 3:-plane, it is analytic in the right half 9plane. As a result,
TM(s) =
(4.16)
(s + e•
is analytic outside the circle in the left half s-plane shown in Figure 4.3. Let the set of all
s e C outside that circle be denoted by D. Then,
=suplTý,(s)
r> l = sup ()11
sup wIIT(s)II= IITwI.
(4.17)
where the greater than or equal to sign is due to the maximum modulus theorem [2, 4].
Consequently, carrying out the H. design for the transformed system ensures that
IITzwj.
<y for the original system.
4.4.3 Transforming the Augmented Plant
In Section 4.4.1, the state space realization of the augmented plant was found to
be of the following form:
c= Ax +Bu+Ew
y = Cx + D12w
z =C2x +D21u+
By substituting s =
1-Ed
(4.18)
22w
into the transfer matrix expression for the augmented plant, the
system is transformed to the 9-plane. The state space realization of the transformed
system is
=x+hu+k2w
X
Z= 21 x+
+
(4.19)
2 2w
where:
A (A+el)(I +eA)B= (1-e2 )(i+ A 1)-B
[(I
[
c21 c-e(I
2(I
eA
+++
PA
)eA)-) -'B'E
2'
-e(I+EA)-1 E
21 -eC2 (I + EA) B+DD
21
22 -- 22(I+eA)-'E +D22
Proof:
The format of the proof is to start with a transfer function matrix representation of
the original system, then substitute s
•
and simplify. The resulting transformed
state space matrices are apparent from a comparison to the transfer function matrix
representation of the transformed system.
Step 1: substitute s= into the expression (sl - A) and simplify
S
1-eS
[sI - A]-[
- A]
= (1- ES)[( - e)I - (1- e.)A]
(4.20)
(1-el)[!(I+ eA)-(A+ E)]'
= (1-
)(I + A)-'[I - (A + e)(I + EA)-1]-
= (I+A)-'[II-(A
+ e)(IA+ ] )-'
-e
-(I+MA)
+Ai
(A+d)]'(I+eA)'
Expand the "*"term in Eq (4.20).
*= e[/- (I+eA)-'(A + eJ)]-
(1 +
A)-'
(4.21)
= e[I-(I+EA)-'I (A+ I)] (I+ A)-'
Apply the Matrix Inversion Lemma ((A + BCD)- '= A- - A-'B(C - ' + DA-IB) DA- ) to the
second line in Eq (4.21).
(4.22)
--')1 (A + l)](I + EA)_EA)-1 (I-(A+ l)(I+ &A)
= E[ + (l+
Substitute Eq (4.22) for the "*" term in Eq (4.20) and simplify.
= (I + FA)1 [i•-(A+ d)(l+
A)I1 r -e[r + (Il -+
A)--
(A+
-(A +d)(1 +eA)_
1}{1(I +eA)-
= -e(I + EAf'+(+ EA)-' [i l-(A+e)(I + eA)-' 1
[(1-E)(I +
EA(
i +eA)_
A+ 1 +()
= -e(I +eA
)( + eA)
-
(A + e)](l + eA)-1
e(A+ E)](i +EA)-_
(4.23)
A1
Step 2: Use the transfer function matrix from u and w to v to derive A,B,EC,,D
,D,
1
1 2
For the original system, the transfer function matrix from u and w to y is
(4.24)
D w
y = C,(sI - A)- (Bu + Ew)+ 12
For the transformed system, the transfer function matrix from u and w to 5 is
(4.25)
S= C (I -A) (Bu+Ew)+ A 2w
Now, substitute the expression for (sI - A)-',given in Eq (4.23), into Eq (4.24).
y= C {-e(I +EA) +( +e) II- (A+ )( +eA)_
][(12)(l+ e)-
By comparing Eq (4.26) to Eq (4.25), A,B,E,Cl,,A1-,A
2
[B+ Ew]+ D12w
can be derived.
(4.26)
A=(A+E)(I +eA)-1
(4.27)
S= (1-E2)(I +eA)-fB
(I)-+E
=(1-2)(I+
I+
C,
=
lI
=(I
)A) + EA)-1
(-e(I+eA)-'B
E
A2 =-eCQ1(I+ A)- E+ 12 = -e(I+eA)
Step 3: Use the transfer function matrix from u and w to z to derive C2 ,D21,D22
For the original system, the transfer function matrix from u and w to z is
(4.28)
z = C2 (sI - A)-I(Bu + Ew)+ D21u + D22 w
For the transformed system, the transfer function matrix from u and w to z is
z = C2(I-
A)-'(1U
+
21u +
1
(4.29)
22 w
Now, substitute the expression for (sI - A)- ', given in Eq (4.23), into Eq (4.28).
z= c
-E(I+&A)
I-(A+ E)(l+&)-'1[ _
+(I+EA)-s
+2)(I
+eA)
[IBu+Ew]+D21u+D2w (4.30)
By comparing Eq (4.30) to Eq (4.29), C2,D2 1,D22 can be derived.
C
• 2= C2((I+ eA)
+
5 21 = -eC 2 (I + EFA) B D2 1
D22 = -EC2(I + EfA)- E + D22
(4.31)
4.4.4 Forming the Full Information Feedback Gain Matrix, F
w]T as the input to the controller, the transformed system has
Instead of y = [x
= C1x + D 11u + )22 as the input. Consequently, the controller input for the transformed
system is not full information. Despite this fact, an H,. full information controller can be
designed for the transformed system. The procedure is as follows: 1) assume that an H.
full information feedback law of the form
(4.32)
u = FIx + F 2 w
exists for the transformed system; 2) Calculate P1 and F2 ; and 3) Calculate a matrix F
that maps
5 into the optimal control defined by Eq (4.32). These steps are explained in
detail below.
To calculate F1 and P 2 Theorem 3.1 of [2] was used. This theorem is the full
information counterpart to the state feedback theorem given in Chapter 3 (Theorem 3.1).
The major difference between the two theorems is the equations for the gain matrices.
For the transformed system, the equations for the full information gain matrices are given
below.
pl = (Tl2)F2
=
(-T•
(T121)-
T
)
b2T122
where:
* P is the positive semidefinite solution to the ARE, Eq (3.2), for the
transformed system.
If the transformed system had full information input to the controller, F1 and F2
would define the optimal control law. However, as stated above, the input to the
controller for the transformed system is J. Therefore, we need to calculate a matrix,
defined as F, that maps
5 into the optimal control. This is done as follows: Let u= F=;
set this expression for u equal to the optimal control law given in Eq (4.32). This yields
F- = F1x + F 2W
(4.34)
Now, substitute the expression for the optimal control into the equation for ý, and
substitute this expression for 3 into Eq (4.34).
F[1+ . F
1)
4
1
]
[[I
P2
[]
(4.35)
For Eq (4.35) to be true for all [x w]r,the coefficients of [x w]T must be equal.
Therefore,
F[C1 +D1 F1
D 1F2 +D12 ]=[F1
F]
(4.36)
Next, substitute the definitions for C1, D1 1, and D12 into Eq (4.37) and solve for F.
This yields
F = [P
4(I + eA)- - e(I + eA)-I B•
S0
-e(I + eA)-1 BF 2 -e(I + eA)-1 E
I
(4.37)
J
Carrying out the inverse operation in Eq (4.37) and simplifying results in
F = [Pi(- BP'
2][(I + eA)
e(E + B
]
(4.38)
Remarks:
i) According to Theorem 3.1 of [2], the control law u = Pix + P2 w guarantees that the
closed loop operator f, has H.norm less than yi.e. VIIL <Y. Since u=Fý and
u = P•x + F2w result in the same closed loop system, applying u = F5 to the transformed
system also guarantees
IVw10
<y.
ii) Eq (4.17) shows that if the closed loop operator for the transformed system, Tw,has
H. norm less than 7,then the closed loop operator for the original system, Tzw, must
also have H.. norm less than 7.
iii) u = Fj is a static feedback control law; therefore, F is invariant under the bilinear
transform. As a result, the control law for the original system is u = Fy.
If the
compensator for the transformed system had been dynamic, then the inverse bilinear
transform would have to be applied to this compensator to find an equivalent
compensator for the original system.
iv) The reasoning for assuming full information is apparent from observing the
derivation of F. If full state feedback had been assumed, then the RHS of Eq (4.35)
would be a function of x, but the LHS of Eq (4.35) would remain a function of x and w.
Consequently, we could not equate coefficients as was done in Eq (4.36).
4.5 Design Results
The purpose of this section is to present the results of the normal acceleration
command missile autopilot design using the H. full information design algorithm
discussed in Section 4.4. The first part of this section shows a trade study of how e
affects ymin, the performance output, and the stability robustness output. Next, 7min, the
full information feedback gain matrix, F, and the closed loop pole locations of the missile
autopilot design are presented for a particular e. Finally, the time and frequency domain
results for the missile autopilot design are given.
4.5.1 How e Affects Ymin, the Performance Output, and the Stability Robustness
Output
As shown in Figure 4.2, the normal acceleration command missile autopilot
design process involves iterating over two parameters, e and y. The first part of the trade
study shows how e affects Ymin. For each e, Ymin was calculated using the binary search
procedure described in Section 3.5.1. The result is shown in Figure 4.4. As e -- 0, the
plot of ymin begins to "spike." This is the result of the transformed system approaching
the singular system. In the range 2 x 10- 9 < E < 2 x 10- 5 , Ymi remains equal to 1.2030.
For e > 2 x 10- 5 , Ymin begins to increase. As e increases, it begins to have more of an
impact on the transformed matrices Eq (4.19) ; therefore, this result is not surprising.
A salient feature of designing an Hcontroller for the singular case was
calculating P, the positive semidefinite solution to the ARE Eq (3.66). P was calculated
according to the algorithm given in Section 3.4.3 using the eigenstructure option for
"aresolv" in the Robust Control Toolbox [20]. With this approach, the maximum singular
value of P was in the range 10'8 5 om(P) -109 (Figure 4.5) while the minimum
singular value of P,ain(P), was on the order of 10-8 for each e and yain in the range of
E considered.
Because P was close to being singular, Schur based algorithms had
difficulty finding a solution to the ARE. This explains why the eigenstructure based
algorithm was chosen to solve the ARE.
To measure the "goodness" of P, a residual matrix, P,, was formed. Pm was
defined by putting P back in to the ARE and looking at the resulting matrix on the righthand side of the equation. Ideally, the residual matrix should be zero but, as shown in
Figure 4.6, the maximum singular value of Per, ama (Per), is quite large over the range
of epsilon considered. However, a directional analysis will show that this result is not
cause for alarm.
The purpose of the directional analysis was to understand the implication of a
large am,, (P,,) in terms of both the solution to the ARE, P, and the augmented plant.
First, the right singular vectors associated with omax(P) and maxm
(Per,) were calculated.
These two vectors were found to be in the same direction. This result says that am,, (P)
may have an error on the order of am (Pe,). Because the mean of ama(P) is
8.37 x 108 and the mean of am,,(Perr) is 3.82 x 103 ,this error is probably insignificant.
Next, the eigenstructure of both Pr and the open loop augmented plant was determined.
This analysis showed that the mode associated with the maximum eigenvalue of P, was
perpendicular to every mode of the augmented plant except for the mode associated with
the complementary sensitivity weight. Since the plant cannot move in this direction, Perr
will not influence the closed loop dynamics.
The rest of the trade study shows how e affects the performance output and the
stability robustness output. The results are shown in Figures 4.7-4.15. As shown above,
the minimum of ymin is achieved in the e range 2 x 10-9 < E 5 2 x 10-5 . In this E range,
Figure 4.11 shows a maximum fin rate of 86 deg/s/G, and Figure 4.14 shows a loop gain
5
crossover frequency ranging from o, = 3 x 108 for e = 2 x 10- 9 to wo
c = 1 x 10 for
S= 2 x 10- 5 . Both the maximum fin rate and the loop gain crossover frequency are
prohibitively large in terms of autopilot design standards. The reason for these large
values can be linked to the properties of the bilinear transform. In section 4.4.2, it was
noted that, under the bilinear transform, all zeros on the imaginary axis in the s-plane get
mapped onto a circle of diameter
-
1
- e in the right-half i-plane. For the missile
autopilot design, we have a zero at infinity on the imaginary axis; therefore, this zero gets
1
mapped onto the real axis of the right-half -plane at -. A property of H,, design is that
E
a closed loop pole will approach the mirror image about the imaginary axis of a right half
plane zero. For the missile autopilot design, this means that the transformed system will
have a closed loop pole at --.
Using the inverse bilinear transform, the original system
1
will have a pole located on the real axis at ---.
2E
Consequently, for the range of e given
above, the closed system for the missile autopilot design will have a pole at
-1 x 109 for e = 2 x 109 and at -1 x 105 for e = 2 x 105. Both of theses pole locations
are considered to be very "fast" resulting in a high bandwidth, high gain, and fast control
design. This is exactly the trend shown in Figures 4.7-4.15.
I~·rr
x109
rrrr... ...
~nl··1
iii
· r
~rrm
·
·. rrlnl
7lr·nl··
· r·l·rrl
j:
i : ::
::
::
1.22
i~PLiiii···L··i··i.j·;·;i.ii···
::
1.215
i
:ij/jI;li
t z··i·ii
-% ·· · · · ·
j
ij/j::
t ii
ii'.
:::
i-C~ii)···()·4·$·:·i·r'
:::
ij:
:::
::
::
· ·· ·.r··
rs
.............
::
iiil:::: :~::;: iiii:i
4
10
j
::·:::: i;
ii
104
ii
a
:i:
iiili
I~
ilii
i:ii:i
iI ii
iii:i:i
iiliii
i
jj;ii
:1· ii
i i ji
i·.·-.··-.·r.).;..
· ·· ·
:~:::
::i::i:
:li:
10-'
.ii·· ···. ·
i::::
iii
ii
L.iiiiii.......i...i.·;..i·i·iii,·,,...
·
12
r.r
104
ilj
iiiiiijlj;
· ·~·Ct+~fl·······C···L··(·-'l'::·1(·····
iii
:if
~·I·I/
iii
iii:i
ii
............
.. ...........:::
1.21
1.205
· ··
i····;
:i;iii ···
· ·i··i·;·.~..···
;····.·--·;·L;
· : i
10.5
4
10
I
I
i 'i''
10-'
Epsilon
Epsilon
Figure 4.5 The Effect of e on a,,(P
Figure 4.4 The Effect of e on rin
o
0.214
1 -o
°"illii[[]i
iii]ii:::
11iii~i
iji
i ~2ii i
. . ...
..
.2 12
00.211
W0
0.206
I
..
..
::
: ::...................
::
.... . . .
::
..
..............
.
.
..
.........
. .
-::::
1H 1 H 1 H;';
"
I
......
...
......
. . . .
.................
:: : :
,
I
)
M
0.20
•tiilH+
t
r.
......
t
iiiii"
i~i~iiii
:i:: 1
•i!ii!i
i!+•
i
............
: ii++++++++
i ++
1++
i+
+
i+iii i: :+ ++++++
..
..--.-..
-+-. ...+. .+.• # .• G . .. - . ; .-.. . .
. . ..
... .....i...
,..
.. . ,i•
i ............
:. . . ........
.
: .......
. ..+
n::
+ +02
li++++i
1+++++++
+' +i" i ! +
"!!iii+
+....
ii..+ii
+++++++
iiii
+ + ++1
i+-
0.2
: ::
iliiii
....
. +
.tiii
0 .202 , -...
15 1041
i~iiiii
.
.
..
..
::
.
.
!:20·:: i·:::1:::•
ilti:::::i · iii;: :::::::::
•! . i.. !11
111 : ....i~
i:ii~
i:. ....i
:x··:....
: :::.:
i i~ !i
+ i ++ i + iiiii
i illiill
.
.
.
..
.
.
. .
..
.
.
.
..
..
.
.....
;
.. ... .
i:i:.
++++!
: :
" "
:
.
·V
0
1V
10
Iv
10
V
10
'v
10-s
..
10
Epsilon
Epsilon
4.6 The Effect of t on a,,
Figure
-
1
(P,)
Figure 4.7 The Effect of E on Rise Time
10
11.2
0.52
r I-~mr
· ··
ii::::
...
::::
7
11.2
i i ::
!··l··;·;~·;i;
···
jiiji
::::
0.51
i
11.2
,iiiiii
iiiiii
"""
i
i·;·;·:·;·:·::'····:···i..ititi
· iljliiii
I
''iii
Ii:::::
;····i··i··i·~·!·!!t
·:
11.1 18
0.49
11.1 6
11.1 4
0.48.
11.1 2
0.47
1-9
0
i
:
It: ii
::
::iii
:iiiit
i::.
:::::
::::::
::::::
iiiiii
::::::
::::::
10-5
10.6
10-7
10 *
10 -3
104
I · ·· · · ·· ·
in-$
ITh4
·
r·:?.
n..
..
? :·:r;:
V v ..
.. ,,
· ii·::
...
.....
: i
iii
:i
:"I'rl
: ::
::
::
I
T·I-·':
i:
.-. i-·-ii::
.i.
iiiii
:::::
-i·-·-i· ·· ··. i·!·iit ····
100
i
:: :
iiiiii
iiiiii
:::
iii
: iiiiii
i:l:
iii
i iiiiiii
: :
j;jj
i.
i-ici············i· i·;-;-;i~
i i i:::
:··-r·t··-·iI
j
i ij
·
·,~··rl·?,···-c·-·~
-0.14
· I···r,·:Il··
:":"'
:
"~' 'I"'
::
:::
iii:iii
:;::::
iijiiii
::::
il:ll
, I-liir ·· · ·· rjii'j
I:
1o0
""""
i
10'
111111·
10-7
·
IlllltLI
4
10
ii
1 1 "'~'~'
10-s
'~~~
:
iii
::iii
iII~~
iri
::::::
ijiii
iiiiii
iiiii
i:::::
i i :::::
Iiiii
:iiiii
:
:ii:Ilii
i:::::
:
ii:::::
::'iiii
.'jiii.
iiiiii
ii::
:iii
:::::::
i
::
· ·-· · ·- jjii
In
-
LLLII
in-5
jiijiiii
i-iii-~······;
"'
I
i:ii
I;'''I:
:
tllllll(
::
: : ::
10'
i
L II·I)II
10-3
.::
''
iiii
~ L
ii
- fii
ii
i)·i
ii I :~I
j:i
iii
i.
i:II
iiiii
':::
ijii
.... .;. .1..!..:.;.;..;.......:...;..;..;.(.iti:
.~....;.....;.:.;.;,~.......;....;..;.1.
:::
;;·
i
ii
i-
fl R
iiiiiii
:riii iiii-:i
:::::
':::::·
iii
i i :::
II
~~iii~
i
iiiiii
;····i··i··i·i·i·)(i·······i····i··· ·· ·i
.......
-0.12
·
i;;
iii
ii
i
ijiiii
::
::::
I:iiii
iiiiii
::
iiiiiii
':"":
' iiiiiii
I:::I::
i
iliiL,..
:.
· ·· ·L···- ·· :·. i;i;---·i -i-_.: i.-:l;j--j
·· ·
ii:lilll
::::::
iiiii
.......
:::
i iliji
:ii:i
ii:i"
: i:i i
ijiiii
iii.
iii
iIiiii
iiiiji
ill
'iiiiii
""
:-:::::: :
·i
i··i··i-i-ii·i·····
;-·i·i-i·i;:········j···
·: : iii
iiiiji
i·iiii
:iiiii
iiiii
iiiiiii
iiiii
iiiiii
"""
iiii:.
::iiiii
iiiiii
liiiiii
jillli::iii
i
iiliii
iiiiii
;.":::::
:iiii:ii
i::::::
i;-I:-:··
·· · · ·iii:i
iiiiiii
:::::
:
' iiiii
::::
i::
ii;iiii
ijiii;
':::
iiiii
iiiii
ii::::
i
I:::::
:riii
iiiiii
iiiiiiii
.:...::::
.~ ·---- ·· · · ··· ·· ··· ··.- ··· ·-. ·-·-
·......
····
· .....
·· ··-tt:+~·······r····:·-·:·
..
...
...·i.ijliLi·····i-···i···;·J·i.ili··
~:.:::
i'iiii
II I
ii
iiiiii
Bil
· I ··I·^I~·,:···:;-?llr
,?-ll·-····,·r·
.......
:::::
ii::::
:::
1..1.
i··iil·;·;ii
::::::
ciiii
i:::::_:
::::;
i : iij
::::
iiiii
:i::
1tW
i.
,crcl·?,··-··*···c·,··?·l
riii
iiii'
'':
Figure 4.9 The Effect of E on %US
Figure 4.8 The Effect of Con Settling Time
__
i i:i
i i:i
""'
Epsilon
Epsilon
___···m
: :
:::
tIn-7
::I::'i...-
::::
i:
·
· · · · · · · !:j
i
:...
iiii
.-
"""
i ::iii
iiiiii
:iii
:::::
·
i·lr-rn···-·· i···/·r·jil
:::::
iii· ·
iii I iiiii
iilliii
ijijlili
liiiii
`:~~:::
lil:ili
iiil :::
·-·-·· .:..;.-r-:;:..·,..i...i..i.~l.iiii.....
,......l....i..:·.:·:.:-:;~
Iliiili
:::
:::::: ·:··
I
11.0 nR
iijjil
::;:
ii"'
iiiii
ijiii
i:iiii
: i:
:::: ......i....i..i.iii.ii~i.......i........
:::::
i...i..:l:i;:;.....;··i--i-::-.-:l
iiliii
i
i ii'riii:
i::iii
ji:;:::
:..:::
;:;;;:
.'iiiii":::
i
.....
:;:::
i
iiiiiij
:::::::
::::::
::::::
i::I:l:
i
IIriij
Ii:
ii/jii
11.1 rl·~I-~·cr;;·······l··l·
::i:
..
0.4
::iii
ii""
:::
iiiiiii
i:iii
::i::·:
::::
iijii
iii":
:: iji
:::::
:::::
:::
ijiiiiii
11.2
0.5
r ~T1Tn
:::::
(iili:
:::::i
:::::
llrr!?r 7
liiliii
::::::
:::::
:::::::
1
iii
'
L""
4
10
Epsilon
Figure 4.10 The Effect of e on %OS
' ' · 1"L
10-3
gi!
1TO
10-1
10-7
4
10
·i
10-5
104
Epsilon
Figure 4.11 The Effect of e on Max Fin Rate
10-3
U
.m
-r
%t
f-4iliii
85
;jlil
:::::
i:::
I:::
-"""i
~
· · ii
· · · · · j......
i···i
J.:
;...i
....
· Cii · · i·····i
·,·llr·······
iiii
fill
;:::
iili
::!:
.r:-.....:r::
~~ll...........
-······'
70
10o-
10-8
10-1
104
10-S
10-
A!e
10-
I::::
iii ii
iii ii
:ii ii
: : ii
ii ii
0To-
i"'
iii
iii
iii
liiI
::::
ii
::
(i
::
::
ii
ij
jl
:: ii
illf
ii
10
10-7
1 i i iii·::
''i
jli/iiili::ii
i::ji:
iiiiiliiii
:i
· itii)·······
IIii
ii ii
·I·lir····.··l·.·.l..i.Lllirr·.··
iii
ii
::
ii
::
j
ii
ii
ii
ii
iii
:ii
i:
::
ii
lijiii
--+·-;
··
i·l·,;·r;······.·r····.·· i--l·(·lil·····-··-·-···i··i···-iCli·i··
j
i
····
Ij
· · 1··11·1
II··
10
1·11
1 11111111
104
10o-s
iii
10-:
Epsilon
Figure 4.12 The Effect of e on GM
Figure 4.13 The Effect of t on PM
r
....................
......
.......
...
· ····
i~i
..........
0.95
..............
S
· l·lllrlr·I····
::::
:::::
:::I::
'
b
.....
..
~~ili·...........
....
103
i\
:::::
j:;:::
iiiii
iiili
;i!lii
;
· ++o+l+rr·~
ii
ii
ii
i!
i
::
::
::
;I::
Ii
::
::::
Wi::::
l··l·t·Hlt····'··l····l··t·1·+l'
···-···
ii
::::
·· ··:··:··I·i-i·iid·-·····i····i··;·i·i
::
ii
::
s
10-
Epsilon
Figure 4.14 The Effect of e on w,
104
· r,r
10-
07
0.75
....... . ' ....... . '
10-8
10-'
ii
i !i/ii
f0.
-- A.
/i
::
iiii ii
::
ii
::
iii
::
j
· rriiin
i~inin·
17~11~1·
ii
I
::
::
K.!
0.9
........
iiiiiiii
i..i.l.i·iit.......i....i··j·i
··
iLlii
::::::
iit
..
. ........
~ rlrln
:::
::::::
::;:::
....
..
.
..
..
10
m
m
'·l·t'lfl·;"""'l'··'I'·O1'CCII`·'···
r+rtlr······· ....,
Epsilon
4
1111
11711111
::
ii
::
ii
::
::
;····;···;·~
··.··· ·
·
i..i.i.i.ii:........ l....i·.Li·i;·i;·i
::::
:::
:::
ii
::
·
:::
::
:::
::
;; 1riii
i
~jiil
iiii
.zZrn
7
..........
An~
: ::
.....
4 ii-4441H
rr~Tn~
i~iiiI
..
iI
:ii
ii
ii::
ii
::
::i,
iii
iiii..
i
ii::::
;1;1 : ";:i:::i I'"
i ! i ! •i i i i i ii1i i i
..
'*"
•
t
,*,,,
10-6
1 0-
•
'
• ,,'*'"
' '''
4
10
Epsilon
Figure 4.15 The Effect oft on
[I + L- (j0)]
4.5.2 ymin, the H,. Full Information Gains, and the Closed Loop Poles
For the missile autopilot design, an e = 1x 10- 6 was chosen. From Figure 4.4,
this results in a 7'nin = 1.2030. The procedure for calculating the H. full information
feedback gain matrix, F, was discussed in Section 4.4.4. The results are shown in Table
4.1. Finally, the closed loop A-matrix for the augmented missile plant is calculated as
follows:
ACL = A - BFx
(4.39)
where:
* A and B are defined in Eq (4.13).
* Fx is the partition of F that multiplies the augmented state vector.
The eigenvalues of the closed loop A-matrix are also shown in Table 4.1.
Table 4.1 H. Full Information Feedback Gains and Closed Loop Pole Locations
FI Feedback Gains, F
Closed Loop Eigenvalues
5.2028E+1
-5.0002E+5
6.5430E+6
-1.5605E+5
-3.3907E+7
-9.9709E+3
-8.1052E+8
-5.4157E+1
2.8187E+6
-2.5043E+1
-2.5374E+8
-6.5421E+0
-2.4137E+0
As predicted in Section 4.5.1, one of the closed-loop poles (-5.0002E+5) is located on the
real axis at
-
e. Furthermore, Table 4.1, shows that this and other "fast" poles result in
extremely high gains.
4.5.3 Time Domain Results
To assess the time domain performance of the H. full information feedback
design, the following performance metrics were calculated for a unit acceleration
command step response: 63% rise time Tr, 95% settling time Ts, percent undershoot
%UN, percent overshoot %OS, maximum control surface angle 8ma
,
and maximum
control surface rate, 8max. A discussion of these metrics is given in Section 3.5.2. The
results are shown in Table 4.2 and in Figures 4.16-4.20.
Table 4.2 Time Domain Performance Metrics
H.FI Feedback
63% RISE
TIME
95%
SETTLING
TIME
% INITIAL
UNDERSHOOT
% OVERSHOOT
MAX FIN
ANGLE
(DEG/G)
MAX FIN
RATE
(DEG/S/G)
0.211
0.511
-11.2
0.0
1.20
85.6
Design
The maximum fin rate shown in Table 4.2 is too high for a realistic autopilot
design. An obvious approach of dealing with this problem is to increase the penalty on
the fin rate. For instance, increasing WC to 100 results in the following: a rise time of
0.269 sec, a settling time of 0.541 sec, an initial undershoot of %3.8, an overshoot of
0.0%, and a maximum fin rate of 19.35 deg/s/G. Another way of dealing with this
problem is to consider the mixed H2 - H. problem discussed in Section 3.5.3. To
illustrate the effect of increasing y on the performance metrics, let y= 2 x ymin. The
results are a rise time of 0.286 sec, a settling time of 0.562 sec, an initial undershoot of
%3.4, an overshoot of 0.0%, and a maximum fin rate of 11.24 deg/s/G.
Time (sec)
Figure 4.16 Normal Acceleration Response to a Unit Step Acceleration Command
I fld•
80
60
S40
a
20
. ...... ····· ··.............
0
-20
.....................................
-An
0(
.......................................................
......................................................
0.4
Time (sec)
Figure 4.17 Fin Rate Response to a Unit Step Acceleration Command
88
~nd'
0
I
I
I
I
I
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
Figure 4.18 Fin Angle Response to a Unit Step Acceleration Command
2
2
0
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
Figure 4.19 Pitch Rate Response to a Unit Step Acceleration Command
I)
0
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
Figure 4.20 Angle of Attack Response to a Unit Step Acceleration Command
4.5.4 Frequency Domain Results
The following performance metrics were considered to study the stability
robustness of the normal acceleration command autopilot design: classical gain margin
GM and phase margin PM, loop gain crossover frequency, and min(min (I + L- 1)). To
study the command following and disturbance rejection properties of the design, the loop
transfer function from the error signal to the plant output was used to plot the
complementary sensitivity transfer function and the sensitivity transfer function. Finally,
a plot of 'ma(Tzw) vs. frequency was used to verify JITzwL ! min". A description of
each metric is given in Section 3.5.3. The results are shown in Table 4.3 and Figures
4.21-4.25.
Table 4.3SFrequency Domain Performance Metrics
GAIN
MARGIN
LOOP
GAIN
FREQ. ,
PHASE
MARGIN
(It..
-I
,tiYt\uIt
As in the H. state feedback case, the loop gain crossover frequency for the H.
full information design is too high for an actual missile autopilot. A mixed H2 -H.
design helped alleviate this problem for the H. state feedback case. To see if an
H2 - H. approach will remedy the current design consider y = 2 x Ymin. This yields a
loop gain crossover frequency of 5.933E+5 rad/s. With y = 10 x Ymin, the loop gain
crossover frequency is once again 5.933E+5 rad/s. The loop gain crossover frequency
remains so large because in each instance one of the closed loop poles is located on the
real axis at --
1
2e(i.e. -5.000E+5).
As shown in Section 4.5.1, this pole location is a
consequence of the bilinear transform. As a result, e dictates the size of the loop gain
crossover frequency, and the H2 - H. approach cannot remedy the current design.
Zl
..........................
..
. . . . . . . . . . . .. . . .. . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
. .
.
.
.
. .
.
.
. .
.
...
...
...
..
..
..
. ..
..
...
..
..
..
..
.....
. .
.
.
.
. .
.
.
.
. .
. .
.
.
.
.
..
..
..
...
..
..
..
..
···
· · · · · ·
-· · ·' · ·· ·· ·..............
...................
........ .......
......
............
..........
..................
........... ..................................................................... ...............
.................
.....
...........
.........
......................
..................................
B/I·
-kv
-100
.....
-80
-60
-40
-20
Real
Figure 4.21 Nyquist Plot
r)M
0 -
Frequency (rad/s)
Figure 4.22 Loop Transfer Function, L
Figure 4.22
A
Frequency (rad/s)
Figure 4.23
min(l + L- 1) Vs Frequency
-.
JD
4
-10
10-3
10-2
100
10-1
102
101
103
104
Frequency (rad/s)
Figure 4.24 Complementary Sensitivity and Sensitivity Transfer Functions, T and S
0.8
10-3
10-2
10-'1
100
101
102
103
104
105
106
107
Frequency (rad/s)
Figure 4.25 Maximum Singular Value of the Closed Loop Operator, Tz
Chapter 5
Conclusions
5.1 Summary of Results
The purpose of this study was twofold: (1) to provide heuristic proof and intuitive
explanation of the H. static feedback theory given in [2] and (2) to develop missile
autopilot design algorithms based on this theory. Two cases were considered: H., state
feedback control without zeros on the imaginary axis and H. full information feedback
control with zeros on the imaginary axis. In each case, a normal acceleration command
missile autopilot was designed and evaluated based on time domain and frequency
domain performance metrics.
5.1.1 Chapter 3 Results
The H. state feedback design given in Chapter 3 was based on Theorem 3.2 of
[2]. In terms of design, the important consequences of this theorem are the ARE Eq (3.2)
and the state feedback gain matrix Eq (3.3). From an engineering perspective, the proof
of Theorem 3.2 presented in [2] is not intuitive. Since most control engineers familiar
with H. design are familiar with the minimax problem, the state feedback problem
associated with Theorem 3.2 was restated in a differential game setting. By formulating
the H. state feedback problem as a differential game, first order necessary conditions for
a saddle point were established and used to derive the ARE, the optimal control, the worst
case exogenous input, and the state feedback controller given in [2]. The derivation of
the ARE, the optimal control, and the optimal exogenous input was reminiscent of a LQR
formulation. The optimal control and worst case exogenous input derived from the first
order necessary conditions were then shown to satisfy second order necessary conditions
and a subset of the second order sufficient conditions for a saddle point.
As shown in Figure 3.1, the H. state feedback algorithm used to design the
normal acceleration command autopilot augments the missile pitch state dynamics with
weighting functions, calculates ymin, and provides performance and stability robustness
output. A salient feature in developing the algorithm was recasting the ARE Eq (3.2) into
a form that current control system design software could solve (Appendix A). In
addition, whether or not MATLAB could calculate P, the positive semidefinite solution
to the ARE, was dependent on the selection of the complimentary sensitivity weighting
function. If the pole of WT(s) was placed too far in the left half plane, then the
augmented plant became uncontrollable and MATLAB could not calculate P. The
minimum value of gamma calculated from the algorithm was ymin = 1.2310.
Simulation of the H, state feedback autopilot revealed a maximum fin rate of
62.6 deg/s/G (for a unit step normal acceleration command) and a loop gain crossover
frequency of 12,886 rad/s. In terms of missile autopilot specifications, these values are
prohibitive. However, increasing the control penalty, W (s), from 0.1 to 1.0 decreased
the maximum fin rate to 20.0 deg/s/G. In addition, a mixed H2 - H. design with
y = 2 x Ymin reduced the fin rate to 10.6 deg/s/G and reduced the loop gain crossover
frequency to 20.3 rad/s. An apparent advantage of the H2 - H. approach was that the
autopilot design could be tailored to meet a loop gain crossover frequency specification.
Consequently, the H. state feedback algorithm shown in Figure 3.1 is an effective tool
for missile autopilot design.
5.1.2 Chapter 4 Results
In Chapter 4, Pu of the augmented plant was forced to have a zero at infinity on
the imaginary axis resulting in a singular H. problem. The method used to solve this
singular H,, problem was based on the frequency domain loop shifting discussions in [2,
4]. For the case of imaginary axis zeros, the frequency domain loop shifting design
methodology consists of (1) transforming the augmented plant using a bilinear
transformation of the s-plane, (2) designing an H. controller for the transformed system,
and (3) using the inverse bilinear transform to transform the controller found in (2) back
to the original system. To retain a static feedback structure, this method was shown to be
applicable only for the full information case.
Figure 4.2 shows the algorithm used to design the H. full information feedback
controller for the missile autopilot in the presence of imaginary axis zeros. The primary
difference between Figures 4.2 and 3.1, is that the singular case is parameterized by
e and y whereas the nonsingular case is only parameterized by 7. Because the singular
case involves iterating over e and y, a trade study was done to show how e affects 76in,
the performance output, and the stability robustness output. The results are shown in
Figures 4.4-4.15.
An important result of the trade study was that the mean of
max(Pr)=3.82 x10
over the range of epsilon considered (Figure 4.6). At first
glance, this result seemed cause for concern. However, by showing that
amax(P) were in the same direction, and that the mean of
,,max(Per) and
(P) = 8.37 x 108, the error
,ma,
was considered insignificant. Furthermore, an eigenstructure analysis showed that the
mode associated with the maximum eigenvalue of P, was perpendicular to every mode
of the augmented missile plant except for the mode associated with the complementary
sensitivity weight. Since the missile plant cannot move in this direction, Perr does not
influence the closed loop pitch dynamics. From the above trade study, e = 1 x 10-6 with
a corresponding Ymin = 1.2030 was chosen for the missile autopilot design.
The important results for the H. full information feedback missile autopilot
design were a maximum fin rate of 85.6 deg/s/G (for a unit step normal acceleration
command) and a loop gain crossover frequency of 5.973E+5 rad/s . Similar to the H.
state feedback case, these values exceed autopilot design specifications. However, the
H2 - H. approach did not alleviate the large loop gain crossover frequency problem for
the singular case.
An inherent feature of the bilinear transform prevented the H2 - H. approach
from reducing the loop gain crossover frequency for the singular case. Section 4.5.1
1
as a
2e
argued that a closed loop pole of the original system ends up on the real axis at ---
result of the bilinear transform. For the missile autopilot design, e was chosen to be
1x 10-6; therefore, a closed loop pole was always located on the real axis at -5.0 x 105
regardless of the value of y. This pole location, in turn, resulted in a high loop gain
crossover frequency. The apparent link between e and the loop gain crossover frequency
limits the usefulness of the frequency domain loop shifting technique as a means of
designing an H,, controller for an augmented missile plant with imaginary axis zeros.
5.2 Contributions
The contributions of this study were the intuitive explanations of the H. static
feedback theory presented in [2] and the H,. static feedback algorithms for missile
autopilot design. In Chapter 3, the ARE and the H. state feedback controller, K, were
derived using a differential game approach. While the relationship between differential
games and H,. control theory is well documented (see [21]), the differential game
presented in Chapter 3 is atypical of those found in other studies because of the cross
weightings among the state, the control, and the exogenous input. The missile autopilot
design algorithm described in Chapter 3 is a generalization of the one used in [1]. In [1],
D D2 was assumed to be 0; the H,. state feedback algorithm presented in Chapter 3
does not make this assumption. In Chapter 4, the frequency domain loop shifting design
methodology for a singular H,,. full information problem was presented and explained in
detail. The frequency domain loop shifting theory was based on [2]. However, [2] stated
the results without derivation. This study "filled in the blanks" by showing how the
bilinear transform affected the state space representation of the transformed system and
by deriving the expression for the H.. full information controller, F. The design of the
H.. full information controller for the augmented missile plant with imaginary axis zeros
in Chapter 4 represents a new result in missile autopilot design.
5.3 Future Study
Two areas of further research related to this study are (1) designing H.. servos
with integrators and (2) applying recent H.. control theory for plants with imaginary axis
zeros [6, 7] to missile autopilot design. The LQ servo with integrators is a popular tool
for missile autopilot design. As shown in [5], if a reference input in the form of a kth
order differential equation is given, then a LQ servo with integrators can be designed
such that the error signal, e, goes to zero as t - oo. An interesting study would be to
design the servo with integrators using an H. performance index instead of an H2
performance index. Another interesting study would be to apply the H.. control theory
for plants with imaginary axis zeros presented in [6] and [7] to a missile autopilot design
problem. Reference [6] investigates the imaginary axis zeros problem using matrix
inequalities. Reference [7] presents a necessary and sufficient condition for the solution
of the one-block H.. control problem with imaginary axis zeros.
Appendix A
Solving the ARE
The standard packages in the commercial control system design software such as
MATLAB and MATRIXx are not designed to solve algebraic Riccati equations of the
form given in Eq (3.2). However, these software packages can find solutions to AREs of
the following form:
(Al)
ATP + PA + Q - PBR-1BTP =0
In this Appendix, the ARE given in Eq (3.2) will be transformed to the form given in Eq
(Al).
The ARE given in Eq (3.2) is repeated here for convenience
ATP+ PA+ CTC
DTzD2
D DD
BTp + DC
B
_,y2I
DLD,
DL+DC
E'TP+DLC
-BTPEP+
DCJ =
+ DJTCA
(A2)
The first step in converting Eq (A2) to the form given in Eq (Al) is to expand the
matrix under the inverse operation. This is done using the same trick that was used in Eq
(3.38). The procedure is show below.
DzDI
DID 2 - y2 1
D1 TD DD2_
=
-D2
1
-LD
(DTr,
1
)
I DD
Tl
1
ILD 2TD
DjD 2 -
I
M
2
-DDD
IDi(DiT
I
]
()
if
where the existence of both (DTD)-I
and M-1 were addressed in Section 3.3.1.2.
Next, the inverse operation in Eq (A3) is carried out and the result is substituted into Eq
(A2).
ATP+PA+CC-
' -(4De'P+4'C[(44tP+
where:
0
t'W-
'
W-where:T
0]['TP+,Cc =o
C
(A4)
W=D~D2 -_ - TD(TA )-1 4
Carrying out some of the matrix multiplication in Eq (A4) yields
=
Q -R BTP+D
ATP+ PAB+CTC [BP+DLC]
(A5)
ETP+DC -jS W- JLETP+DTCJ
where:
Q = (D)R = (DDT
+ D
D
DY
W-'DT
(LD )-
DTD 2W-1
S=W-'D2T (DTD)Multiplying the last three matrices in Eq (A5) gives
ATP + PA + CTC - PBQBTP - PBQDTC - CTDQBTP
-
CTDQDTC + PESBTP
+PESDTC + CTD 2SBTP + CT D2SDT C + PBRET P + PBRDC+ CT DRET P
+CT DRD,2C - PEW-IETP - PEW- 1D2TC - CTD 2W - 'ETP - CTD 2W -
(A6)
D
2TC = 0
Now, collect terms to form the following equation:
B
AP+ PA +Q- P[B • E]
(A7)
=o
BT
where:
A = AT - CTDQBT + CTD2 SBT + CTDRET - CTD2 W-'ET
+BRD2TC-EW-'D2TC
=A-BQDfC+ESDTC
S= CT (I - DQDT + D2SDT
+ D1 RDT - D2 W-1DT
)C
Note that from Eq (A3) and Eq (A5) we have
-R
[-S
W-
IQ
=D
2TDl
(A8)
D2D
D D,
D2T
2-
7y2J
Substitute Eq (A8) into Eq (A7). The result is
AP + P + - P
•tP + P~i + g - P~I?-l~
p
(A9)
p =0
=o
100
where:
R=DzT
D-2
AD
2
D
I
The final task in converting the ARE given in Eq (A2) into the form given in Eq (Al) is
to show that A = AT. To do this, compute AT and compare to A.
AT = A _ CTQTBT +CTDTSTET +CTDRTBT
cTD2 (T)-
ET
(A1O)
Comparing Eq (A10) to A in Eq (A7) reveals that
i) W=WT
ii) Q = QT
(All)
iii) R = ST
must be true for A = AT.
Proof of i):
w
= DZD
2 1I -
2-
WT .D(D2 :
DzD (DT
D)-
-
1 D
2 -
*W
2
)-,D)DD )
D[(DD )D ]
= D2T2j I- DD- [(D
= DD
4TD2
( -_(D(
- 2
= DjD2
1
D)T ]IDD
(A12)
_2 2I - D2T1-(TDj)-lDT2
=W
Proof of ii):
Q= D(D)- +(DL)-DD2 W--DT
Q= [(D[A'D] + D[(DThJ
[(DD)'
=[(DD)T]1+
(~T1)-
DLD 2W1D,T(LDD)D1]T
DTD2
101
(1T
D
(A 3)
TDD[
Use the fact that WT = W
+ (1TD)-l
DTD 2 W-DTDI(D
=(T)-
1)-
..QT = Q
Proof of iii):
S = W-1DTD(DD 1 )ST = [W-DTDI(DTD)-I] T
= [(DTD -1]T DT D2 (W- )T
(A14)
Use the fact that WT = W
= (DT
- D
D2W-1
..ST =R
Therefore, we have shown that A = AT. Since A = AT, rewrite Eq (A9) as
ATp + pA + 0
p- -Tp
(A5)
(A15)
=0
As shown by Eq (A15), the ARE given in Eq (A2) has been transformed to the
form shown in Eq (Al). Consequently, we can use current software packages to solve the
ARE in Eq (3.2). To calculate P, the positive semidefinite solution to the ARE, do the
following:
* Form A, B, 0, and 1 (Eq (A7) and Eq (A9))
* Use LQR routines to solve for P in Eq (A15).
102
References
1. Wise, Kevin and Nguyen, Tam. " Optimal Disturbance Rejection In Missile Autopilot
Design Using Projective Controls", Proc. of the 3 0th IEEE CDC, Brighton, UK,
Dec. 1991.
2. Stoorvogel, A. A. The H,, ControlProblem: A State Space Approach, Ph.D.
Disseration in Mathematics, Eindhoven University of Technology, The
Netherlands, October, 1990.
3. Doyle, J., Glover, K., Khargonekar, P.P., Francis, B.A. "State Space Solutions to
Standard H2 and H,. Control Problems", IEEE Trans. Auto. Cont., Vol. 34, No.
8, 1989, pp. 831-847.
4. Safonov, Michael. "Imaginary Axis Zeros in Multivariable H., Optimal Control",
Proc. NATO Workshop on Modelling, Robustness, and Sensitivity Reduction in
Control Systems, Springer-Verlag, Heidelberg, 1987.
5. Safonov, Michael and Chiang, Richard. "CACSD Using the State Space L, Theory A Design Example", IEEE Trans. Auto. Cont., Vol. 33, No. 5, 1988, pp. 477-479.
6. Scherer, Carsten. " H. Control by State Feedback for Plants with Zeros on the
Imaginary Axis", Submitted to SIAM Journal of Control and Optimization.
7. Hara, S., Sugie, T., and Kondo, R. "H. Control Problem with jo0-axis Zeros",
Automatica, Vol. 28, No. 1, 1992, pp. 55-70.
8. Blakelock, John. Automatic Control of Aircraft andMissiles, John Wiley & Sons,
1991.
9. Wise, Kevin and Deylami, Farhad. "Approximating a Linear Quadratic Missile
Autopilot Design Using An Output Feedback Projective Control", 1991 AIAA
Guidance, Navigation, and Control Conference, New Orleans.
10. Athans, Michael. Viewgraphs ForMultivariableControlStstems I, Massachusetts
Institute of Technology, 1989.
11. Roskam, Jan. Airplane Flight Dynamics and Automatic Flight Controls, PartI,
Roskam Aviation and Engineering Corporation, Ottawa, Kansas, 1979.
12. Wise, Kevin. "Autopilot Design Document" Informal Memo, KAW-88-014,
McDonnell Douglas Missile Systems Company, 1988.
13. Kirk, Donald. Optimal ControlTheory, Prentice-Hall Inc., 1970.
14. Athans, Michael. Lecture Notes ForMultivariable Control Ststems HI,
Massachusetts Institute of Technology, 1989.
103
15. Bryson, A. E. and Ho, Y. Applied Optimal Control, Hemisphere Publishing
Corporation, 1975.
16. Wise, K., Mears, B., and Poolla, K. "Missile Autopilot Design Using H,. Optimal
Control With y -Synthesis", Proc. of the ACC, San Diego, CA, May, 1990.
17. Reid, J. Linear System FundamentalsContinuous andDiscrete, Classic and
Modern, McGraw Hill, 1983.
18. Nguyen, Tam. Personal conversation, August, 1991.
19. Francis, Bruce. A Course in H. Control Theory, Springer-Verlag, New York, 1987.
20. Safonov, Michael and Chiang, Richard. Robust ControlToolbox, The Math Works,
Inc., South Natick, MA, 1988.
21. Bryson, A.E. and Carrier, Alain. " A Comparison of Control Synthesis Using
Differential Games (H-infinity) and LQR", 1989 AIAA Guidance, Navigation,
and Control Conference,
104