Document 11185454
advertisement

UlluLt\~~JtltU
lVlassachus etts Institute
It,--t- /) If (Gl\"l'\'J ...~i
of Technology
C)
t •.
?,
~
_ltJ:p..1.C.b ..
CLASSIFIED BV
C).~~
SUBJECT TO GENERAL DECLASSIFI~N-----
(:. 960)
SCHEDULE OF EXECUTIiE ORDER 11652
AUTOMATICA~LY DOWNGRADED AT TWO YEAR
INTERVALS
dIF~fE
TED IN P .i~~TIAL FULFILL?vIEI~T
ON -OOlEMBER-91,o.a
QUIRElvIENTS FOR THE DEGHEE OF
Mi~STER OF SCIENCE
at the
CHUSETTS
M
o
INSTITUTE
January)
Z
OF TECI-INOLOGY
1963
b1)
-3
o
0:
0')
Signature
of f._uthor
Department
of }~
..eronautics
and Astronautics)
Januar,y
14) 1963
\
Certified
by
_
Thesis
Accepted
Supervisai'
by
Chairln~
DECLASSIFmll
UNCLASS!F1ED
(I
'
":J L
DECLASSIFIED
ACI(NO\VLEDGEl\lIENT
This report
was prepared
DSR Proj ect 52 -156
Missile
J
under the auspices
sponsored
of
by the Ballistic
Division of the Air Research
and Devel-
opment Command through US.AF contracts
AF 04(647)-303
and AF 04(694)-305.
This document contains
the national
inforlnation
affecting
defense of the United States within
the meaning of the Espionage
Laws
U. S. C.
J
J
Sections
or the revelation
unauthorized
the transmis
is prohibited
of this report
by the i\ir Force
conclusions
Title 18,
of which in any manner
person
The publication
approval
793 and 794
J
to an
by law.
does not constiJ~ute
of the findings or -:he
contained therein.
It is published
only for the exchange and stimulation
DECLASSIl-1ED
-2-
sion
of ideas.
ACI(NO\VLEDGEMENT
DECLASSIFIED
The author is grateful
Department
for the association
of Aeronautics
Instrumentation
and Astronautics
Laboratory)
to develop analytical
for an operating
which affords
concepts
behveen the
and the
the opportunity
as well as an appreciation
state-of-the-art
system
while performing
, this investi~a tion.
The author wishes to acknowledge
his appreciation
to
of the Skipper J. Group who developed the
the members
highly reliable
system
In particul~r)
on which these data were recorded.
the author wishes to thank the following
persons.
Professor
assistance)
Vvin'ston R. Markey for his supervision)
and criticisms
of the initial
draft while acting
,
as technical
faculty advisor
Mr. Richard
its direction)
E. Marshall
and markedly
on this thesis.
for suggesting
commenting
on the initial
Mr. Thomas E. Reed and Mr. William
their many stimulating
the preliminary
Mrs.
discussions
the topic) guiding
draft.
T. McDonald for
of the subject matter
draft.
Elaine Walsh for typing this paper.
DECLASSIFIED
and
~,'''-,,','-,,-'-,
",,'
~.
FORE\rVORD
DECLASSIFIED
This fore-v-rord describes
thesis
and the general
It is not considered
the goals and results
situation
a regular
that surrounded
of the
this \,york.
part of the thesis.
s
On October
passing
1, 1962, the 2-16 system
at the 1V1. 1. T. Skipper J Test Facility
During t~1is tilne,
recorded
E-1231
stable base gyrocompassing
on the system operating
(Ref. 3) contains
thegyrocompassing
The results
performed
to better
recorded
the
the existence
capability
of
accurate
of arc rms error
in azimuth
of hours.
angles below the order
in the 2-16 gyrocompass
of 1962.
are as follows.
gyrocompassing
arc about the horizontal
on
to and \vhich preceed
demonstrated
of hundreds
Incremental
results
in this thesis
than five seconds
for periods
data had been
hefore the fourth quarter
The 2 -16 gyrocompass
a memory-moqe
2.
the pertinent
system
for 2000 hours.
in a benign environment.
which are fundamental
investigations
1.
had been gyrocom-
of O. 01 seconds
axes can be consistently
operating
of
detected
in a benign environ-
mente
3.
Gimbal static
and sliding friction
appear to be a major
problem
nonlinearities
in the oper~tion
base gyrocompass.
DECLASSIFIED
did not
of a stable
.
h f.
Durlng t e lrst
DECLASSIPIED
..
quarrel" oI'-rTI"tf2prellmlnary
expe
J
on a vrheel speed modulation
technique of gyro error
demonstrated
of
the feasibility
averaging
detecting very low level torque
changes in a 2FBG-6F gyro with its input axis approximately
east.
Thes tests
conducted on a single instrument
a test table are the subj ect of T-315 (Ref. 1).
indicated the possibllity
mounted on
The results
of utilizing wheel speed modulation
to
ach,ieve a fixed base azimuth indi.cating system for long operational periods.
sample
First
efforts
data procedure
, and other members
on paper to devise an operational
were carried
on jointly by the author
of the Skipper J Group (Ref. 2).
The program. for the 2 -16 system
of 1962 had as a first
during the fourth quarter
goal the demonstration
bility of the wheel speed modulation
of system
technique.
in control of this effort as a research
The author, was
assistant.
The experin1.ental part of this thesis \vas to record
system performance
of instrument
versus
uncertainties.
inputs that limit frequency
feasi-
b<?-ndwidthto reveal
data on
characteristics
These data forln one set of system
regions
covered by practical
solutions
'(Chapter IV).
Equal importance
characteristics
development
vias attached to defining probable
of such systems
(Chapters
of adequate operational
operating
II and III) and the
procedures
(Chapter
V).
Because the above aims were M¥=gW~m1?dent
demonstrating
reasonable
the thesis
feasibility
to report
these results.
is to present
resultsachie'ved
s
of the vlhole technique,
organized theori~s
of operation
for the wheel speed modulated
matters
and
gyrocompass.
in a single docu-
the coverage which is often limited but manages
at least one plausible
solution in each area.
The -results of these investigations
1.
it became
Thus) a third goal of
.The value of having these related
ment justifies
upon
are as follovls.
The thesis analysis' of system performance
versus
bandwidth reveals
instrument
below the
values previously
anticipated.
frequency
uncertainties
regions of realistic
These data .extend the
system performance.
(Chapter IV).
,2.•
Wheel speed modulatio.n techniques
appear to demonstrate
the capability
level torque variations
in the east gyro operating
benign system
3..
aJ?e reported
rrhe thesis
environment
of detecting low
uncertainty
with anticipated
system bandwidth and incremental
to define probable
operating
compensation
procedures
environment
(Chapter V).
in a
(Chapter IV).
combines the data on the spectrum
and instrument
which
of system
changes in
angle measurements
characteristics
in a realistically
and gyro
perturbed
4.
The thesis ,eports. stablDl:~SSImDmpaSsing
charac~eristics
assumptions
and justifications
\vhich describe
unconventional
instrument
s
5.
closely
performance
.
The thesis' reports
ment alignment
(Chapter III) .
for the simplifying
this system
with its
coupled loops and superior
(Chapter II).
accuracy
and derives
requirements
a possible
on instru-
alignment
method
DECLASSIFIED
DESIGN CRITERIA FOR A STABLE BASE GYROCOMPASS
by
John M. Vergoz
Submitted to the Department of Aeronautics and Astronautics on
January 14, 1963 in partial fulfillment for the degree of Master
of Science.
ABSTRACT
The current status of self- azimuthing capabilities of inertial
guidance systems in a fixed base missile is reported.
Empirical results and analyses are presented.
Data taken on an east gyre error averaging technique, wheel
speed modulation, tentatively demonstrate the capability of
detecting changes in the east gyro performance with sufficient
accuracy to extend the operational period indefinitely.
The problems associated with absolute instrument alignment
in a fixed base gyrocompass are discussed and one of the many
possible solutions presented.
Data indicative of instrument uncertainty spectra in a benign
environment are combined with estimates of the necessary changes
in system bandwidth and recompensation techniques to operate
the gyrocompassing system in an operational environment.
The data presented on gyro drift uncertainty spectra reveal
that considerable latitude exists for optimizing system performance in the presence of horizontal acceleration inputs.
Thesis Supervisor:
Title:
VVinston R. Markey
Associate Professor
of Aeronautics and A 3tronautics
DECLlissrflED
~i%~~;
~j'~~~~~fi~~t~~~~,i;~~~tW~i*~~~~~t~~:
~'j;
~,~4~4~'~~?1{~
.~"~~~:~~<'H~P~s~~:~~~;~"~~~~~"~:::'\fZl~~}~~;t1l.L.-'~.~ir~
...... ... - ..
--
-
,,'
~.,;.
--
--.-
DECLASSIFIED
TABLE OF CONTENTS
Page
CI-IAPTER I
Intr,oduction
CHi~.PTER II
Gyrocompass
CIIAPTER
Laboratory
III
ratio
Characteristics
Alignment
.
21
45
11 ••••••••••••••••••••••••••••
System and Instrun1.ent Performance
CI-Lt1.PTER
V
Operational
.CI-IAPTER
VI
Conclusions
APPENDIX
I
Non1.enclature ....
APPENDIX
II
Spect:r'a of Gyrocompass
~
12
and Calib-
CI-IAPTER IV
BIBLIOGRP.PHY
.
Syster.a. Evaluation
..
..
0
0
0
••
70
105
129
0
•••••••••
0
•••
0
0
••••••
0
••
0
00
Angles .....
•••
0
•
0
•
0
••
0
133
139 '
••
145
DECLASSIFIED
LIST OF FIGURES
Figure
2 -1
Stable Base Gyrocompass
Figure
2 -2
Gyrocompass
Figure
2-3
Functional
Coordinates
23
Block Diagram
26
East AziInuth Gyrocolnpass
29
37
5
Figure
2 -4
East Azinluth Dynalnic Errors'
Figure
2 ~5
Azimuth Lateral
Figure
2-6
Figure
3-1
Deviation of East Gyro IA From Geographic
Figure
4-1
East Azimuth Gyrocompass
Figure
4-2
Uncertainty
Figure
4-3
2-16 Gyrocompass
Short-Term
Figur~ 4-4
2-16 Gyrocolnpass
Effect or Varying Bandwidth
Figure
2-16 Gyrocolnpass
Effect of Wheel Speed Modulation.
4-5
. Gyrocompass
Acceleration
Frequency
North Gyroconlpass
Figure
Qpen/Closed
Figure 5-3
.,
40
Step Response
Figur..e 5-1
5-2
Errors
Loop
43
East ..
75
'
77
Stability
83
5-4
- East i~.zimuth Gyrocompass
Open Loop East Vertical
Gyro Drift (one-half
86
103
107
109
Sensor Output for Incorrect
Azimuth Gyro COlnpensation
Figure
....
Loop
Open Loop East Vertical
47
Sensor Output
normal wheel speed)
DECLASSIFIED
114
- East
122
Table 1-1
Regions of Interest
Table 2-1
Error
Tab).e4-1a
260 Hours
- Low East/Azimuth.
Coupling
.
80
Table 4-1b
168 I-Iours
- I-ligh East/Azimuth
Coupling
.
81
Coefficients
17
0
0
0
0
0
.: ...
,s
~
0
•
0
0
'.
0
•
0
0
0
••••••
35
'0
,DECLASSIFIED
I
The effectiveness
INTRODUCTION
of an inertial
guidance system is restricted
by the accur,acy to :which 'it can be aligned in azimuth and
to the,
5
vertical.
Such guidance systems
with optical techI'!iques utilizing
are presently
complex groundinstallatiqns
an accurately
surveyed
azimuth reference.
and corrected
with an accelerometer"
device operating with the system
Since inertial
aligned in azimuth
The vertical
pendulu~um,
and
is sensed
or other leveling'
gyros.
guidance of missiles
became a reality,
the possi-
bilUy of alignment by gyrocompassing
has been realized
and, at
tiriles',used.
alignment
A deterrrent
requirements
to gyrocompassing
using available
advflpces in the development
,ing gyros,
instruments.
of single-degree-of
coupled with system
developed the operational
has been stringent
optimization
capability
Recent
-freedom
techniques"
of self-aJigning
,integrafhave:'
missile
guid-
ance systems.
This paper discusses
as .well as laboratory
gyrocompassing
alignment,
calibration
tional' concepts for a fixed base inertial
are'indicative
of the uncertainty
theory and characteristics"
spectra
tern form the basis of the calibration
techniques"
and opera-
guidance system.
Datathat
of the gyrocompassing.
and compensation
developed.
DECLASSIF!EO
sys-
techniques
1. 1. 0 Gyrocompassing
By definition)
DECLASSIFIED
a gyrocompass
includes any and all
devic'es or systems
that align the111S
elves toa 'predetermined
set"ofcoordinates)
using the earthls
direction
angular velocity and
of gravity as basic references.
are sensitive
to the earthls
devices which determine
Instrun'lents
angular velocity)
the direction
fore) the core or a gyrbcompassing
coupled \vith
of gravity are)
system.
'stabilized
electrolytic
member
levels)
integrating
devices
etc.) to the
In the three-gyro
the gyro input axes are approximately
Basically)
sensing
accelerometers)
drives.
there-
The direction
of gravity is .defined by connecting the vertical
(pendulums)
which
vertical)
system)
north and east.
the ideal east gyro torque sUl'nmation is only satisfied
\vhen its input axis is parallel
to geographic
east.
The azimuth'
o,rientation of the gyrocolYlpassing systcr.o. defines the angular
velocity applied to the east gyro input axis.
By coupling rota tion8
about the east gyro input axis to the azimuth gyro torque generator
via the east vertical
sensor)
a change in the angular velocity sum-
mation of the east gyro 'will produce a new azimuth angle.
new azirnuth angle changes the horizontal
This
con'lponent of earth rate
applied to the east' gyro input axis.
Accuracy
primarily
capabilities
of the gyrocompassing
detern'lined by the stability
closed loop gyrocompassing
system
system
of the east gyro.
cannot distinguish
DECLASSIFIED
are
The
between
DECLASSIFIED
internal
changes in the east gyro characteristics
torques))
making the angular
applicable)
(uncertainty
velocity summation
no longer
and a change in azimuth angle coupling a ne\v
component of earth rate into the east gyro.
Gy:r6compassing
techniques
differ n1.ainly in the method of
detern1.ining changes in performance
external
references.
East-wrest
of the east gyro with no
averaging .. gyro wheel reversal)
and wheel speed mo'dulation are three methods
evaluation which have been investigated
paper limits attention
environment
it has recently
level torque variations
1.2.0
Accuracy
in recent
to vrheel speed modulation
because
in a system
been us ed to determine
long-term
gyrocompassing
for these regions
imposes
low
severe
The follovving discussion.
included to develo'p a feeling for the magnitude
of interest
is
of the problem.
in the gyrocompassing
are included in ,the body of this report.
As an example)
the gyroconlpassing
assume
that the absolute
drift uncertainty
allo\vable uncon1pensated
at medium latitudes
per hour).
azimuth
stability
shall be within + 5 seconds
system
This defines the maximum
degrees
This
on a single component basis.
demands on systelTI performance.
system
years.
Requireluents
Accurate
Justification
of east gyro
of
of arc.'
east gyro
to be 0.018 meru
(0.00027
Allowable north and azimuth gyro uncertain-
DECLASSIFIED
.
. ........•
.
-
.
~-
'.
'",
'-
,
..-:.... ."
t
..
~
ties are a function of syst~.¥~~~hich
between gyrocolnpassing
is, a cOlnpromise
uncertainties
and lateral
horizontal
accelerations.
In a benign environinent,
gyro drift rates
in the O. 1 to 0.5 meru region can be tolerated
in. thes closed loop gyrocompass.
north and azimuth
Changes in the perforlnance
of the north and azimuth gyro can be con1.pensated for in the
closed loop gyrocompass
b~cause they produce vertical
as well
as azimuth errors.
To detect changes in the performance
wheel speed Inodulation technique
of~small angles by the east vertical
of the east gyro,
requires
the n1.easurement
sensor.
A highly stabiliza-
tion servo gain and low values of gimba~ static friction
produce the r.nost desirable
In the system
operating
(i. e.,
in the 1 in. oz. region,
most nearly linear)
in a benign environment,
servo gains of 50 ft.lbs/mr,
the
will
operation.
stabilization
coupled 'with gimbal static friction
have combined to develop a system in
which 0.01 seconds of arc can be detected and used to recompensate the east gyro.
Since gyro drift produces
in the gyrocolnpassing
system,
angle variations
the time required
to measure
small angles defines the bandwidth of gyro drift detection.
Latitude
relocations
ponents of earth rate.
change the vertical
and horizontal
com-
If the east gyro input axis is not parallel
to geographic
east,
latitude
relocations
the earth rate
applied to the east gyro.
DECLASSIFIED
will change the value of
This change in earth rate
DECLASSIFIED
applied to the east gyro v/ould vary the ~zimuth angle of the
gyrocompassing
reference
degrees"
system.
and ope:ating
If the laboratory
absolute azimuth
area are separated
by five latitude
seven sec~nds of arc error
le?ge of:the east ~ro
arc azimuth error
know'-
inpllt axis will produce one second of
at the nevI latitude location.
Thes e regions 6f interest
The gyrocompassing
angle stability
in the laboratory
are summarized
system requirements
are to maintain the
over a maXllnUnl time interval
can be extended to several
years.
in Table 1-1.
vvhich, hopefully,
The basis of thes e numbers
is the subj ect of this report.
1.3. 0 Operational
Integration
The unattended self-calibrating
system requiring
no alignment or stability
years after it leaves the laboratory
internal
guidance
checks for several
is not a reality.
How'.ever
J
the guidance system under test has the ability to memorize
set of coordinates
for all presently
launchings.
system
over several
for missile
If the gyros are periodically
with no external-references.
missile
days vrith sufficient accuracy
known requirenlents
can hold the reference
t
and satellite
recompensated,
the
for an extended period of time
Integration
site containing optical references
reduce the missile
a
s vulnerability
of this system into a
would immediately
to ground disturbances
DECLASSIFIED
by
~:<
Regions of Interest
Angle Stability
AZ,imuth Variation
< + 5 seconds of arc-
'North Variation
<
+ 1 second of arc
East Varia tion
<
+ 1 second of arc
o
Uncompensated
Gyro Drift
North
O. 1 to O.5 meru
Aziriluth
0.1 to 0.5 meru
- East
<
0.018 meru
better
than 14 seconds
Component Alignment
Knowledge of laboratoryorientation of the east
gyro input axis:
of arc.
l\1iscellaneous
50 lb. ft/mr
ST1.\.B Servo Gain
1 in. oz.
Gimbal Friction
Incremental
0.01 second of arc (benign environr,l1.ent).
P...ngles
0.1
Hepeatability oJ Changing
East Gyro Vvheel Speed:
~~
Table for t15
0
better
second of arc (operational
environment) .
than O.Olmeru
latitude.
DECLASSIFIED
.
DECtASS~D
nlemorizing
the pr,oper g-Llidan'cesystem
maintaining
alignment
after the optical reference
The ,three main areas
of interest
the o~der of decreasing
cedure;
(2) sensitivity
vlhich is primarily
of the system
(3) response
in
of the sys-
a function of
of a recompensation
pro-
to latitude relocations,
vrhich depends on a knowledge of the absolute
~ast gyro input axis;
system
are (1) stability
and the effectiveness
therefore,
is dislodged.
for an operational
importance
tem ?-s an absolute reference,
gyro drift rates
orientation,
orientation
time of the system,
of the
which
is dependent upon the 'nlaxin1.um allovvable system bandwidth.
_ The systeln,
\vhere accurate
techniques
data, and concepts are applicable
initial platform
This report
section
~\
4,. Stable Base Gyrocompass
For ...
is intended to carry
characteristics
fixed base inertial
IV presents
by gyrocompassing
is required.
1.4. 0 Design Criteria
compassing
alignment
in any area
through operational
guidance systen1..
pertinent
sumlnarizes
the reader
concepts fora
A slight detour in Chapter
data on an operating
the organization
from gyro ...
system.
The following
of this report.
•
Chapter II reduces
pass to a two-axis
interes't.
the complexity
model suitable
of .the three-axis
for analysis
This model is analyzed to determine
betvveen gyrocorn.pass
gains,
error
coefficients
DECL-liSSIFlED
gyrocom-
in ~he regions of
the linear
response
relations
time,
and systen1 banchvidth.
Chapter
III indi.cates
the relation
east gyro input axis aligt1l11cnt
A laboratory
latitudcB.
the orientation
between
and aziInuth
technique
knowledge
accuracy
of the
at various
is developed to detern1.ine
The wheel speed
of the east gyro input axis.
modulation
concept of gyro error' averaging
laboratory
optilnization
anticipated
in the labor'atory
is analyzed
technique presented.
deterlnination
and a
No change is
of accelerolneter
bias scale factor and input axis ,location.
Ch2pter IV detern1ines
the spectrun1
gyro drift on the basis of several
gyrocompassing
the recording
operation
Two system
bandwidths were used in
can be properly
over two-hundred
identified.
Hesults
in instrulnent
of vyheel speed
and sixty- eight hours of systen1
are also presented.
Chapter
V develops
a corl1pensation technique for a fixed base
gyroco111passing internal
based on instrument
but anticipates
increnlental
perturbed
guidance systeln.
perrornlance
the necessary
recorded
This tcch.nique is
in the previous
changes in system
angle measurements
\vhen operating
chapter
band\vidth and
in a realistically
enVirOn111ent.
Chapter
accurate
hundred hours of stable base
of these data s () that uncertainties
performance
modulation
data.
of ,azilnuth and east
VI sun1rl1.arizes the' difficult problen1s
stable base gyroconlpassing
this paper.
associated
and the results
\~/ith
achieved
in
Appendix I contains a
Appendix II assumes
interferring
that \vind gust spectrulu
function between the benign laboratory
opera tional envirol1ru cnt.
confirlns
as\vell
the orders
as the vertical
operational
is the primary
The' spcctrul1l. analysis
and the
analytically
of rnagnitude of the mean square
azimuth
angles v/hich lTIUStbe detected in an
gyro recompensation
procedure.
DECLASSIFIED
DECLASSIFIED
II
Chapter
C"YTtOCOl\;JPASSING CHARACTERISTICS
II reduces
c0111passing systeln
characteristics.
produce
the cOlllplexity of the three-axis
to a nl0del suitable
All simplifying
a two-axis
and response
dcvelopluent
friction
are justified
to
dynalnic and steady state
In addition,
the eHect of a vertical
sensor
order lag in ihe region of interest.
and angle transducer
approach
gains,
tinle of the system.
considers
without a first
assulnptions
of systenl
luodel which is used to develop the relation-
ships between gyrocornpass
errors,
for analysis
gyro-
nonlinearities
exist,
the
with and
Although
the linear
is justifia1?le becaus e it develops the necessary
initial
insight into stable bas e gyroconlpas sing characteristics.
referring
to Appendix I for n0111enclature,
bypassed
by the reader
dynan1.ical relations
"Laboratory
Chapter
II may be
who is fan1.iliar v/ith gyrocon1.pass
with no loss in continuity,
Alignment
By
and Calibration
proceeding
Techniques"
to
of Chapter
III.
2. 1. 0
Coordinates
Local geographic
coordinates
are designated
Xct
-
north,
b
yo.... east,
b
and z
g
- vertical.
are assumed to be perfectly
In this chapter,
plat,fornl coordinates
aligned with instrument
DECLASSIFIED
coordinates.
Sincc
the inst':"L:ITlentcd
cool~dir}atcs
ar'c at all tiii.L~~3 nC::lrly
approxin}~~tionJ
,_~rot.a_tiG:.!
is equivalent
Since
to
these
y'otai:ion
coo~'clj:l~Jt(;'S and local
rotation
c:'
rotations
about
~!bO~lt
arc
of the third
approxilnations
greatly's
instrurn.ented
by a
developed
add curnulatively
irnplify
affcc
coordinate.
to define
coordinate.
the development
a
These
to follow
i.t.3 validity.
ge()[~:l'aphic and .i.-;~s'l.rul~lcnted coordinates.
axis
ec~sC &,':;TO iA is
(i, e.,
sorls
sensitive
\vhich
acceThs
by th(~ ;''If;i)rOpriate
is dcsi:;;:l~ltcd
orientat.ion
its input
the angles
coordinat.e
2 -1 i:~ a line SChC:::'Tlc~tic of ti.le gyroco111passing
instrlunenJc
gyro
to a first
an. insLru111ented
SEl8.llJ
nC'l.! oricntation
Figure
coincident
Dbou L a -geographic
two coordinates
and do not seriously
geogr:':jphic
2xis is p~J..:.~2.11c:l to the
0.
its output
east
e.)
location
Tile vertical
C:D.~=) ::).
icput axis of the
vertical
The
SCllSO},IS
of
s en-
gyro
sensitive
Using slnall angle
approxirnations
(cas
the total angular
f)
=
velocity
1 sin 8
input
=
0)
J
J~quation
2 -1 .indicates
to each gyro.
wx -
(J
w
y
z
-
A y + A x U(')18
...
A
z
V
(2-1)
- A Z W(l' e)h
-
+ A y w,.tlC)l1
',' + u,. )
tIe v
,<.
"'A glossary
01'
symbols ~~L.AS.srlfi~;endix
1.
DECLASSIFIED
r~JOF<TH
'l
(I
1\;;)
vV(le) h ::: \U io cas
V E f1 T I ('..., ,D•..L
- L.- \)
w
'"
r'l
L,L\T
The steady state output of each vertical
in Equation 2 -1 .
v\there Sand
the north and east vertical
iTO'.ts
"
..t..)
p e'Y'
.1.
S
xv
yv
sensors
sensor
is indicated
are the sensitivities
respectively
01
nleasured
in
II b.~
0" I
North Vertical
East Vertical
Sensor Output:
r1
b
A
X
S
xv
gA y S yv
Sensor Output:
(2-2)
The north gyro and vertical
sensor
are connected together
in such a n1anner that they ideally constrain
the east gyro in the horizontal
sumu1.ation is basically
east gyro is east.
plane.
The .east gyro torque
only satisfied
\vhen the input axis of the
If the east gyro input axis is not east,
will sense the horizontal
component of earth rate,
where Az is the angle behveen geographic
gyro input axis.
-A w(; )h'
. '-' ...e
Q
east an,d the east
developing an angle,
A .
Y
tilt about the east axis will develop an east vertical
This
sensor
output equal to g Ay Syv' .which is coupled to the azilnuth
torque generatol" and commands
such a direction
it
This angular velocity will caus e the platform
to tilt :-::.boutthe east axis,
,
the input axis of
an azin1.uth angular
gyro
rate in
as to reduce the angle between the east gyro
input axis and the east geographic
coordinate.
systen1} the east gyro torque sunlrnati6n
- ..
l~itP
.. Itl'
, r~
, ..
.,..1
"
.
....
:#__
",
(satisl'ied
,':
,
"
.
t~
.,
For our ideal
..
.......
,'
._,,'
,"
only when
the input axis of the eRf~~~~~.Qt),
coupled
Slllnrrlation in the azimuth gyro (satified
of the east vertical
conlpassing
sensor
only when the output
is zero) combine to produce a gyro-
systelu which uses the ,direction
earth rate as the only external
alignnlent.
A convergent
bchveen the east vertical
with the torque
reference
of gravity and
for initiai platform
solution is established
sensor
by a coupling
and the cast gyro.
L.,
2. 2. 0
Block Diagranl
Figure
2-2 is a cOl"nplete functional block diagram of
the gyrocon1.passing systen1. showing nlajar 111echanical, electrical,
and earth rate couplings.
model for stability
and response
tilue,
their justification)
1.
In order to obtain a suitable
analysis)
determination
the follo'wing six assumptions.,
coefficients,
together
v/ith
are presented.
Typical stabilization
servo tilne constants
Gyro compass tilue constants
are greater
The dynan1.ics of the stabilization
in the study of gyrocornpassing
stability.
of error
v/orking
(The platform
are O. 02 seconds.
than one minute.
se~vos may be neglected
alignment
dynarrlics and
is ahvays aligned with the input
axis ,of its gyros.)
2.
The gyro time constants
do not affect the stability
con1.passing system.
of approximately
01"
0.001 seconds
the solution tin1.e of the gyro-
~~
~~2:
>,
<!:
nr""~
\."
j
~) iI
:;" ~
;~--:-_¥~
....
(!)
<a:
!
\ ..-
r.:.::\
\'.,,,,"
()
0~
......J
f(i
......
(\
I
..J
:"'0
r.J
'~4:
-.'"
I
(!.
-
L!
-~~:: ()
x
~
...
:::J
r;-'-'
:J
LL
/(f)
Jf)
<J'
r'"
~_tq
II
a
e"_
0
•,...-
I
C'
15
I~
18
::~~
C)
(...)
Ct:
o
0
f"'"p.
Z
>-
UJ
(1)
U)
~
"'-'I,.
I~
I
C!')
~
L
....1
i"
If.:>
JO:
l:J>
I
x
(f)
+
f~
0..
i
t> li
!
~! ~,....I
J
l
(51
12
,..........
1_- -"":'--.1I
i.
r
.. if
3,'
For this chapter
Static friction
DECLASSIFIED
static frictIon
is assumed
levels are approximately
to be zero.
1 in. oz.
Typical
stabiliz2..tion servo gains are 50 in. oz. per arc second.
Therefore)
error
4.
0.02 seconds of arc gyro signal generator
is sufficient
to overCOlne static friction.
Alignment about north involves
seeking the vertical
onlYJ
and a sufficiently
high gain loop can be closed so that north
alignment
have negligible
accuracy
errors
effect on gyrocompassing
.'.
and solution Hnle. ',' The' upper boundary on the
value of north gyrocompass
loop gain is allowable
system
noise.
5..
The horizontal
component of earth rate coupled into the
azilnuth gyro" due to a rotation
compared
to the azin'luth gyro angular
via the east vertical
values of I(li.E'
gradient
about east .. is negligible
sensor
(I{j\
T:"1
rate comrnanded
and I(P,l..E for all practical
> 1 roeru per second of arc .. and
.L~.:....t:& -
of earth rate at 45 degrees
latitude
equals 0.0034
roeru per second of arc. )
~:"
.A.t45 degrees latitude) steady state angle errors about the north
gyro input axis .. il.x" produce an equal azirnuth angle, Az' of the
stabilized nlernber.
The steady state value of A.."can be easily kept
belo.w one-half second of arc.
The transient involved in north leveling can be cOlnpleted faster than the gyrocolnpas sing transients.
Noise restrictions
and vertical sensor dynaluics are the only restrictions on the solution time of the north leveling loop.
G,
Pel'fect
co.r-t.h rate con1pensation
is assulned,
and gyro
...J .•
drift'" or instabilities
in the gyro torquing
supply are included
- ,
in total gyro drift rate,
\tVith the previous
reduces
assun1ptions
to that of Figure
2-3,
that the azin'1uth gyro angular
equal zero.
orientation
is satisfied
Therefore,
It .is observed
velocity
the steady
azimuth
state
of the gyrocon1passing
The solution
T(
LEE
+ lr'---AE
velo-
+- (u)wy -A Y I(~E
~I
equilibrium
system
2-3
azilnuth
is
(2 - 3)
(u)W ]
z
to Equa t~on 2 - 3, in the abs ence of east gyro and
gyro drift,
is a gyrocompassing
luented
east axis parallel
angular
velocity
to geographic
sumlnation
a basic limitation
performed
on gyrocolupassing
east gyro drift only produces
this stabilized
Ie 1
2-2
is satisfied
The east gyro angular
z
-[ (u)w
W(ie)h
Y
(u)w,
, .
x,y,z
from Figure
summation
when --;;. w(")l
1
or'
the diagran1 of Figure
J
when (u)wz + ]\y KAE equal zero.
city sUlulnation
circuits
n'1'ember,
system
east.
'with the instru-
The open chain
in the east gyro places
accuracy.
Steady state
a change in the azimuth
Since the gyrocon'lpassing
angle of
system
~::Gyr~ DrHt:- Throughout this paper the term gyro drift is used
to designate total gyro drift (i. e., any internal change in the
torque sumn1ing member and/ or torquing supply),
()
r0
I
(\j
I,
I.LJ
~
::)
<D
l1...
;
.~
f
l
I
i
{
1...1)
:2-=
L0
Cl)
J
l
I
~
<.(
\
-
,.
~
0.::
Q..
::-
~
I
1
I
Ir-"",
_J
U
r~
I
I-
w
i
l-
i >
a
~ii
~
3
~~
v
J
I-
I
i <t
i w
(f)
,
t
~-'
-.--.i~
"Y'
~
<
.-..
,:;}
......
I'
j
n.......
Ii
is the azinluth
DECLASSIFIED
reference}
east gyro drift cannot be detected
in the clos ed loop system.
Azimuth '-'
Qyro drift} (U)LJ z ) Dro.
duces an output from the east vertical
aZilTIuth angle error.
sensor
as \vell as an
The effect of aziInuth gyro drift on
azirTIuth angle can be Ininimized
by compensating
the azimuth
gyro and Ininimizing the output of the east vertical
2.3.0
Gains} Dynamic Errors}
Response
Section 2:3. 0 \vill consider
and ho\v these charac'teristics
vert~cal sensor
affecting gyrocolnpass
response
are affected by the use of a
gains.
system.
Stability
becaus e thes e errors
Response
before transient
to lateral
assull1ed for two reasons.
First}
to l~andle analytically"
dynamic errors,,'
before
accelerations
depends on the arnou~1t of filtering
into stability"
considerations
dynamic
dep'end on the
respons.e because
Equal roots to the gyrocompass
easier
systen1 characteristics
gains \vill be considered
and steady state errors
considered
Time
with,a time constant affecting the response
thne of the gyrocolnpassing
gyrocompass
sensor.
\vill be
the transient
to be done.
characteristic
equation are
the case of equal roots is
yet provides
the necessary
and response
insight
time of the second
,I.-
as \vell as the third order
gyrocolnpass.
',' Second" in an opera-
,t....
"'SecondOrder
Gyrocompass:yertical sensor thne constant
negligible cOlnpared to gyrocompass solution time.
Third Or'der Gyrocolnpass:Vertical sensor thne constant
greater than one-third the gyrocon1pass solution time.
DECLASSIFIED,
DE
.'
"
.
"Cr.AS~IJ."In'Dh
t'lng
SYSteln,
gains
ViI11CU s.~
electromechanical
errors
L.e
on the basis
root solution
--'-'--.
f senSl "t""t"
IVI les
+
0'
devices and aluplifications
in excess of ten percent.
deterrnined
'
prO~1UCl.
often acclunulate
Optinlun1 gain can only be
of system performance.
gives the system
01
designer
The equal
an initial point fr01TI
which gains can be optilnized.
Tll'e development
for a critically
width.
to follow deterlnines
damped system
These parameters
Inine closed loop system
accelerations.
daJnped system,
a realistic
acceleration
Observing
the designer
for acceptable
can optll11ize further
.mUln response
thne.
steady state errors
decreased
adjusts
so that system
gyro drift"
of the
bandwidth so
within the initial
allowable band\vidth
the designer
dynalnic errors
T-l}.iswill" to a small degree"
to attain acceptable
ancllniniaffect
bandwidth 111ayhave to be
steady state perforn1ance
The ,developn1ent that follows deterlnines
and response
profile,
is determined"
betw'een forced
the syste111'
the operation
vVhen the maxilnuln
steady sta'te errors
tools,
systen1 bandwidth
the system will have steady state errors
design specifications.
deter-
to gyro drift and horizontal
Armed ,vith these analytical
based on design requirements,
critically.
as a function of ~ysteln band-
response
techniques.
parameters
are next used to analytically
desibmer must next determine
and calibration
system
ti:r11esof the gyrocompassing
gains"
again.
dynamic errors"
system
\vith and
DECLASSIFIED
2.3.1
Gains
Figure
2-3 can be reduced to lVlatrix Equation 2-4.
I.
I(EE
1 +P(TP
+ f)
w(ie)h
-p-
V
A
y
(u)wy
II
-p-
I
-(u)A y K'.l!..:'.,
vE
TTJ?'+ l)P
v
I
Ii
::
I
I
I
II
KAE
1
- J?(T P +1)
A z !I
(U)LJ
z
-p-
I
v
(u)Ay I(AE
+ I1p
-~p
v
(2 -4)
The characteristic
equation of Matrix 2-4 is
+ 1) + I(E", E, P ;- 1<AE w (ie)h
P2(TV P
--
0
(2 -5)
1
.11' T<
v
FI-~-'--- -. -~~AE LJ(ie)h
'\J
lnates the system
) a secondorder
characteristics.
systemyery
For a critically
closely
approxi-
damped second
order
system,
sensor
to east gyro coupling fI<EE)) and the natural
is equal to the square
root of the east vertical
gyro coupling times the horizontal
sensor
frequency
to ,azilnuth
component 0'£ earth r~tte)
,
::
(2 -6)
If the time constant
stability
criterion
of the vertical
sensor
shov/s that Equation
system
RothTs
2-5 is free from right ha)f-
plane poles as long as I{EE > Ki\E w(ie)h
and I(AE' for this third order
can be chosen)
The choice of a
TV.
depends on accuracy
T
v
requir.e-
(
nlents)
lateral
the systcln.
acceleration
pi-'ofile) and required
If all roots of Equation
the following relations
1
T3
=
1
3
response
2-5 are equal (critical
tilne of
damping'),
exist.
::
:::
T
V
(2 -7)
. DECLASSlFIED
DECLAS
2. 3. 2 Dynan1ic Errors
The primary
error
stablc base gyrocompass
vertical
sensor
The vertical
of horizontal
tion of the 'effects of horizontal
gyrocornpass
performance
This section indicates
in vertical
in the operation
of a
arc gyro drift and uncertainties
operation.
are usually a result
sources
sensor
uncertainties
accelerations.
acceleration
is primarily
in
lVIinimiza-
on stable base
a filter
design problem.
the effect of gyro drift and uncertainties
sensor operation
on the closeclloop
performance
of
the gyroco111passing system.
13)' "taking
the partial
derivatives
ii1 vertical
to gyro dri'ft and uncertainties
.
of Matrix 2 -4, with respect
the va~ue8 of
T2
from Equation
Equation 2 -7, Table 2 -1 is obtained.
Taple 2-1 are expressed
of tl1e gyrocompassing
2 -6, and
The error
of 111easure.
to . 001 earth rate,
system
con1ponent of
to any convenient
as the angular
velocity unit of 111casure, and
measure.
To becon1e familiar
froln Table 2-1 into measurements
time, ~the follo\ving constants
are noted.
,r_
T
2 is the time constant
T3
in
This paper \vill use the Ineru, "which is equal
\vith the n1eru and to convert
",'
fron1
coefficients
and the horizontal
the secondo£' arc as an angular
other than reciprocal
~~
T3
and
only as a function of the time constant
earth rate so that they are easily convertible
,units
operation,
.
",
substituting
sensor
is the time constant
of the second order
gyrocompass.
of the third order gyrocompass.
D~CLASSIFIED
T.ABLE 2-1
ERROR COEFFICIENTS
Change
in Azimuth
Uncertainty
Angle
~ Az
Change
in (u)
in East
Angle
Oncertainty
D.. A y
in (u)
SECOND ORDER SYSTEM
1
East
T
'Gyro
(u}w
Y
\
•
2
';.
Azimuth
(P
2
+2:..)
IP ++)
T
2
2
(P
+~)
T
w(ie)h
2
2
2
Gyro
(u)W
z
p
W(ie)h
2
2
(P
+2:..)
(P
T
+2:..)
T
2
2
P
1
(P +-2T
2
2
T2
(P
w(ie)h
2
2
T
.
2
+2..)
T
2
(P +2:..)
T
2
2
THIRD ORDER SYSTEM
East
Gyro
(u)wy
w(O
East
Angle ....
(u)A
y
-35-
3
Ie
)h (P +-)
T3
1
()
see (1.5
1 meru
=
1 meru =
x 10
.n~r!T.Pt~~Tf'IED
meru
-~~ · .
)
=
o. 015
7.27
arc second
degrees
hour
x 10-8 radians
seconC1
(2-8)
,The error
coefficients
Data recorded
indicates
on system
of Table 2-1 are plotted in Figure
performance
versus
that gyro drift has a low frequency
bandwidth
spectrum
2-4.
(Chapter IV)
compared
,to
the time constant
of the gyrocompassing
system.
Therefore,
(u)w
,
.
y
and (u)w.z primarily affect the steady state performance
of the gyrocompassing
system.
For both the second and third order
it is noted that ~zimuth gyro drift,
calsensoroutput
indicates
angle.
Figure
2-4 also
that the steady state output of the east ve'rtical
gyro on the basis
V.
gyro drift.
Recompensation
o! the output of the east vertical
lem in compensat'ion
Chapter
(u),w ' shows up as an .east vertiz
as well as an azimuth
only a function of azimuth
techniques
systems ~
and will~ therefore,
sepsor
is
of the azimuth
sensor
isa
prob-
be coveredin
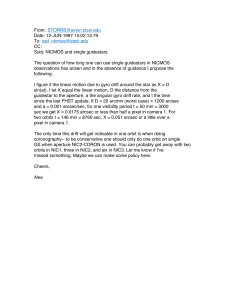
EAST
DYNAMIC
AZIMUTH
ERRORS
1'--
-0.1
~ Az
W(je)h
c\ (u) Wy
I
0.11-
I
0.1
Ib
'1
I
100
0.1
i'Wo
1Wo
2
o .11
~Az
W(i e) h -
~(u)Wz
I
I
ro
I
0.1
100
'f Wo.
I
0.1
'tWo
.1Wo
__
-37~
,
__
FIGU R E:.2 ~.4
2nd Order
""
3rd Order'
\.
DECLASSIFIED
It is noted (Figure 2-4) that steady state east gyro drift,
(u)w , only produces azimuth angle errors.
y
Since the elimi-
nation of all external azimuth references .is the primary
objective in gyrocompassing,
this open-loop characteristic
of the east gyro places basic limitations on stable base gyrocompassing.
With present state-of-the-art
calibration techniques,
the gyrocompass loops must be opened to detect east gyro drift
rates.
The detection and recompensation of the east gyro drift
will also be covered in Chapter V.
The uncertainties
in east vertical sensor operation which are
induced by horizontal accelerations
the closed-loop gyrocompass.
produce dynamic errors'.in
Each micro g of horizontal
acceleration which has a frequency below the breakpoint of the
vertical sensing device produces 0.206 seconds of arc error in
the indicated vertical.
The coupling of these uncertainties
in
the east vertical sensor into the gyrocompassing system is a
function of the frequency of the disturbance,
the time constant of
the vertical sensing device, and the time constant of the gyrocompassing system.
The effect of a vertical sensing device with
a time constant close to that of the gyrocompassing system is to
attenuate the higher frequencies of the horizontal accelerations.
This is evident in Figure 2-4 which indicates that uncertainties
in the east vertical sensor operation,
(u)A , are attenuated above
y
the break frequency of the gyrocompassing system by a slope of
D£ClJiSSIP1ED
DECLASSIFIED
minus two in the third order system and a slope of minus one
in the second order system.
In this section we are primarily interested in the effect of
horizontal accelerations
on the azimuth angle of the stable base
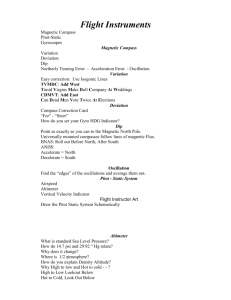
gyrocompassing system. 4* Figure 2 -5 indicates the magnitude
of dynamic azimuth errors
in the gyrocompassing system as a
function of the time constant of the gyrocompassing system and
frequency of horizontal accelerations.
This figure is obtained
8A
from a (u)~
of Figure 2-4 and the 0.206 seconds of arc east
y
vertical sensor uncertainty per micro g of horizontal acceleration .
•
The shortest allowable time constant
*:.'<
of the gyrocompassing
system can be determined from a knowledge of the predominant
frequencies
***
requirements
of lateral horizontal accelerationf? and accuracy
on the azimuth angle of the gyrocompassing system.
For example, assume the stable base on which the gyrocompass
is mounted is vibrating at ten micro g's with a frequency of O.1
radians per second.
*
The following azimuth errors would be induced.
Superscript numerals denote references
in the Bibliography
*:.'c
Chapter V shows that the detection of gyro drift places a more
severe restriction on the time constant of the east vertical sensing device. Consequently, the gyrocompass time constant is
defined for a critically damped system .
.*** This
analysis assumes horizontal acceleratio~ is sinusoidal.
A more sophisticated approach would involve a statistical analysis
of acceleration spectra. Appendix II presents pertinent results
of such an analysis.
DECLASSII1ED
AZIMUTH
.4 xlO
LATERAL
ACCELERATION
ERRORS
-5/
()
/
0::
,/
«
lL.
C'l
o
I
~
Z
/
,/
/
/
/
/
0
en
/
,/
".
/
/
0::.
o U
~ ~
,/
/
/
/
/
/
/
/
/
-3 "./
4 X I 0-
/
z
o
i=
«
0::
-2
4x10-
~
:I:
I-
::>
:E
-I
4 xl 0
N
<t
4
4x 10 I
2
4x 10 I
0.0001
I
I
0.001
0.01
ACCELERATION
FREQUENCY-
RADIANS
SECONDS.
----
-40FIGURE: 2-5
2nd Order
---"3rdOrder
=
T
100
DECT)1~StFl'ED Azimuth Variation
2nd order system
40 seconds of arc
3rd order system
4 seconds of arc
=
T
1000
Azimuth Variation
2nd order system
. 40 second of arc
3rd order system
. 004 second of arc
2.3.3
Response Time
Although i~itial thermodynamic effects and final
non-linearities
in the small angle region make the gyrocom-
passing system response time deviate from that predicted by
linear theory, certain insight into sequencing operations and
solution times can be extracted from the linear model.
Because
the initial output of the east vertical sensor has a predominant
effect on the azimuth transient,
the most desirable response of
the gyrocompassing system consists of two phases:
liminary leveling;
(2) gyrocompassing.
Preliminary
(1) preleveling
can be accomplished with a high loop gain, the'time constant of
which is only a function of the time constant of the vertical sensing
device.
For the third order critically damped system,
equals 3
T
leveling.
v
,
since
T
one-for'th of the total alignment time will be us'ed for
.
If preliminary leveling is not used, the east vertical
J
sensor output will often produce azimuth errors
DECLASSlf1ED
in excess of the
initial azimuth- angle.
bECiAssfhi:Din
a system with an
east azimuth coupling of 100 meru per second of ,arc" an
initial east error of 10 seconds of arc in the wrong direction
,would produce over 300 seconds of arc azimuth error before
the output of the east vertical sensor changed sense.
Since
in'itial azimuth angles are seldom above 60 seconds of arc"
it is apparent that preliminary leveling will" in most cas es"
reduce the transient response time.
The accuracy of pre~
liminary leveling is a function of lateral horizontal acceleration.
Since initial east error angles are around the 10 arc second
region, three time constants of the leveling loops should reduce
the output of the east vertical sensor to a small enough value
so that the gyrocompass loops may be clos ed.
By substituting Az(0) for the uncertainties
on the right hand
I
side of Matrix Equation 2 -4 and transforming the results,
the
linear azimuth time response of the gyrocompassing: system is
obtained.
The response time for the second and third order
critically damped systems with equal gyrocompass system time
constants are indicated in Figure 2-6.
It is noted that the
responses are 'quite similar and, also, that if
T
3 equals three-
quarters of T2, ninety-five percent of the azimuth response
would be complete in both the second and third order systems in
an equal amount of time.
Referring to Figures 2-5 and 2-6, it
is noted that for equal lateral horizontal acceleration
errors
the
GYROCOMPASS
RESPONSE
STEP
0.90.8-
. t2
Az (t)
Az(o)
~
•_
t
!
1; ,.
:U+t+213)e
0.70.,6-
0
<t
«
';:;:; 0.50.4-
AzU)
Az (0)
0.3-
= (.1 + t
. ,_l.
)e ~
0.20.1-
0,
o
I
2
.I
:3
I
I
I
I
I
I
1
4
5
6
7
8
9
10
t
r
-43FIGURE: 2-6
III
DECLASSIFIED
third order system can have a wider bandwidth and will,
therefore,
have a much faster solution time than the
second order system.
DECLASSIFlEI>.
-44-
III
'D~CT. ..1l c~r1-"T1m
ALIGNMENT AND CALIBRATION
LABORATORY
The knowledge required in an inertial guidance system to
permit accurate guidance is the position of the input axis of
the accelerometers
(i.
e.
I
the measurement coordinatesL
relative to the local vertical and an azimuth reference in the
defined horizontal plane (i. e.
In sequence
l
I
the geographic coordinates).
one measures the position of the accelerometer
axes with respect to the vertical sensing device and azimuth
reference.
In the laboratory an azimuth optical reference line
can be surveyed in and used to erect and align the system.
A
mirror attached to the stabilized member is designated as the
prime reference during the calibration sequence
l
and the measu-
)
rement coordinates are located in relation to the mirror.
If
absolute optical azimuth and vertical references are available.
at the system's operational sight
l
the measurement coordinates
are defined in terms of local geographic coordinates by slaving
the mirrored
surface to the optical reference.
Stable bas e gyrocompassing substitutes a gyro input axis
for the azimuth reference at the operational sight.
that no absolute optical reference is available
l
Assuming
the predeter-
mined laboratory orientation of the stabilized m.ember must
coincide with that orientation acquired by gyrocompassing at
DECLASSIFIED
DECLASSIFIED
I
laboratory optical reference,
one can write an equation
describing the angular velocity summation performed by the
east gyro of the gyrocompas sing system in terms of gyro
misalignments,
residual interferring
torques, and compen-
sation.
(3-1)
Because of latitude coupling into Equation 3-1, the gyro
misalignment angles must be defined in the laboratory if the
laboratory and operational sights are at separated latitudes.
To determine the misalignment angle knowledge requirements
as a function of latitude, Equation 3-1 is differentiated,
holding
the residual term and compensation current constant.
*A(h_y) =
angle between horizontal plane and east gyro input
axis (Figur e 3-1) .
A(y _y) = angle between geographic east" and east gyro input
axisg(Figure 3-1)
DECLASSIFIED
-46::
DEVIATION OF EAST GYRO IA FROM GEOGRAPHIC
EAST
W{je}v
VERTICAL
Y GYRO INPUT
A{h-
-"----
y)
HORIZONTAL
NORTH INTO
PAGE
AXIS
PLANE
-----------------MIRROR
YGYRO
fA
WEST-Yg
__A(-Yg-m)--
GYROCOMPASS
A(-Yg-y)
VERTICAL
WE~T
= A(-Yg-m)
INTO
~A(m-y)
PAGE
SOUTH - W(ie)h
GYROCOMPASS
Y GYRO fA
EAST Yg
MIRROR
-47FIGURE: 3-1
EAST
W(ie)[(A(h_y) cos Lat + A DECL~~mPd
(yg-y)
Lat
.
- cos Lat dA(y _y)] = 0
g
(3-2)
The angle between the horizontal plane and east gyro input
axis, A(h_y)' is only defined by the null* orientation of the
north gyrocompass loop and is independent of latitude.
The
change in azimuth angle of the gyrocompassing system is
equal to the change in angle between geographic east and the
east gyro input axis.
Rearranging Equation 3-2, the effects
..
of latitude change on the azimuth angle of the gyrocompassing
system are apparent.
dA
(y g -y)
d Lat
=
A(h_y) + A(y _y) tan Lat
g
(3-3)
*
The north gyrocompass loop is always operated close to a
null. When the system changes latitude, the north gyro is
recompensated.
Section 2. 2.0 and Section 5. 1. 0 discuss
the north gyrocompass loop.
DECLASSIFIED
-48- .
DECLASSIFIED'
Equation 3-3 indicates that the change in azimuth angle of
the system as a function of latitude only depends on the east
gyro's misalignment angles.
To develop a design require-
ment on the east gyro's misalignment angles as a function of
latitude, assume that the calibration laboratory is located at
45 degrees latit~de.
For a
.:!: 5 degree
latitude zone around
45 degrees, the rms a.zimuth error is to be less than two
seconds of arc.
Under these conditions, A(h_y) and A(y _y)
g
must be knowrito better than 14. 1 seconds of arc.
The remainder of this chapter presents a method which can
be used in the laboratory to determine the east gyro misalignment angles.
Also presented is the initial laboratory optimization
of wheel speed modulation.
In order to determine these angles"
the laboratory should be equipped with a rate table and two auto-.
matic autocollimators referred to geographic east and west.
In
addition, it is assumed that the system has one stationary mirror.
*
~(If the system permitted optical access to the east gyro case,
advantages could be gained by locating a mirror :withrespect to
the gyro input axis on a single component basis and then observing
the position of the mirror when the system is gyrocompassing.
However, the development that follows assumes the more general
case of an arbitrary azimuth mirror on the stabilized member.
DECLASSlTIED'
3.1.0
A(h_y)
DECLASSIFIED
Several schemes have been proposed to reduce the
angle between the horizontal plane and the east gyro input axis.
One of these measures the azimuth orientation of the gyrocompassing system at several latitudes and determines A(h_y).
This method uses the effect to calibrate the cause but is impractical because of the large latitude separation of surveyed sights
required.
Also" this method assumes all other system para-
meters remain constant during the time required for latitude
change. A second method rotates the stable member exactly
one-hundred and eighty degrees about a horizontal line" keeping
the east gyro input and output axis in a plane perpendicular to
the line.
This method requires unrealistically
accurate measure-
ments of a large angle" and also assumes that changing the
orientation of the east gyro by one-hundred and eighty degrees
.in the gravity field will not affect its torque summation.
Method
number three artifically applies a vertical rate to the stable
member of the gyrocompassing system.
When the east gyro is
insensitive to the component of vertical table rate along its input
axis" A(h_y) is equal to zero.
By rotating the stabilized member with a vertical table rate
before the gyrocompassing system is assembled" A(h_y) can be
measured to better than ten seconds of arc.
DECLASSIFIED
-50-
Once A(h_.y)is
DEer. It (!'C':I
known" it can be compen~~mD:>r
c
reduced, depending on
the alignment flexibility ~'c of the gyrocompass inptruments.
The deve~opmentthat follows assumes a method is available
for reducing A(h_y). This simplified the subs'equent measure'ments of A(y _y) and R" but does not reduce the validity of
g
the technique if A(h_y) can only be compensated for (i. e., not
reduced).
The vertical table rate is applied along an axis which is
nearly parallel with the east gyro output axis.
This table
rate couples unwanted torques to the gyro float through, other
axes.
The table angle changes the component of horizontal
earth rate applied to the east gyro input axis.
The accuracy
of measuring A(h_y) relies firmly on the table rate and angle.
The following detailed description of the calibration procedure
defines the accuracy of determining A(h_y) and the optimum
table rate and angle.
Mathematically" the moments about the output axis of a
single-degree-of-freedom
*
integrating gyro are as follows.
If the north vertical sensor null orientation with respect to the
stabilized member can be easily changed" A(h_y) can be reduced.
In practice, machining tolerances will probably establish an.
A(h_y) of approximately 0.1 milliradians and, if measured, this
angle can be compensated for.
DECLASSIF7RIl .
* 1; M(OA) =
DECLASSIFIED
H wi-f(IA)
+ P 2 Ig(OA) Ac ...f(OA)
(3-4)
Equation 3-4 assumes that the gyro angular momentum is
orthogonal to its input axis" the case and the float input axis
are perfectly aligned" and the spring force of the gyro float with
respect to its case about the output axis is equal to zero.
Solving
Equation 3-4 for the angle of the gyro float with respect to the
case about the output axis" Ac-f(OA)"
1
Ac-f(OA) =
I
P( g(OA)
Cd(OA)
STG ic
+ ---
Cd(OA)
>.'c
+
(u)M(OA) ]
Cd(OA)
Appendix I contains a definition of terms .
.P~CLliSSlE1ED
(3 -5)
The, angular velocIty'Of ~fi~T~1J
float with respect to
inertial space about the gyro's input axis~ wi-f(IA)~ is
equal to the angular velocity of the gyro case with respect
to inertial space plus the angular velocity of the gyro float
with respect to the gyro case.
Wi-f(IA)=
(3-6)
wi-c(IA) + wc-f(IA)
The angular velocity of the gyro case with respect to
inertial space~ wi-c(IA)~'is due to the angular velocities
external to the gyro case.
The angular velocity of the gyro
float with respect to the gyro case~ wc-f(IA)~ is produc~d by
inertial torques between the gyro float and case about the
gyro input axis.
With the gyro output axis nearly vertical~ a vertical table
rate, wT~ is applied to the stable member.
If the gyro input
axis is not orthogonal to the vertical~ the table rate applies
WTA(h_y) ~o the gyro case.
The problem is to minimize A(h_y)
by reducing the effect of the vertical table rate on the gyro input
axis.
This table motion couples two unwa.nted chan~ing angUlar
velocities into the gyro input axis.
First,
the horizontal com-
ponent of earth rate depends on table angle.
Second, the table
DECLASSlflED
-53-
_~.~;I .
DECI.ASSIPlED
rate being nearly coincident, with the gyro output axis, couples
a torque equal to HWT to the gyro float with respect to its case
about the input axis.),'c The problem is to separate the angular
velocit:y applied to the gyro input axis due to A(h_y) from the
other effects and reduce A(h_Y).
To minimize the effects of varying earth rate applied to the
gyro with A(h_y) constant, the gyro input axis is aligned approxi),'c~'c
Th
'
..
1.
STG
mate 1y para 11e1 to nort h . .
e gyro torqulng slgna , 1c -H '
is adjusted to cancel the northerly component of earth rate plus
any,residual bias in the gyro.
Under these conditions, when a
vertical table rate, wT' is applied to the stabilized member,
the
varying angular velocities applied to the gyro case about its input
axis are
W
i-c(IA) =
(3-7)
),'cThehigh ratio of output axis damping to inertia in a '2FBG-6F gyro
forces the gyro float to very nearly follow the gyro case for output
axis rates below five hundred radians per second.
),'c*The horizontal gradient of earth rate around north is a minimum.
DECLASSIFIED
If the magnitude ofthe table angle" AT" is less than 0.03
radians and the table rate" w " is greater than the vertical
T
component of earth rate" Equation 3-7 reduces to
(3 -8)
A sinusoidal table rate is chosen for- reasons which will
become clear as the alignment procedure proceeds.
AT
=
w T --
B' sin
W
0
T
B w 0 cos w 0 T
(3-9)
Substituting AT into Equation 3-8" and remembering that
sin2 x
=
1/2[ 1 - cos 2 x]" Equation 3-9 changes to
DECLASSIFIED
-55-
(3-10)
DECLASSIFIEI>.
Equation 3-10 indicates
that the frequency
of the horizontal
component of earth rate applied to the gyro is twice that of the
.table rate.
If the magnitude
could be separated
of these rates were equal,
by observing
they
the output of the gyro ducosyn
with the table rate as a reference.
If the magnitude
of the
change in horizontal
earth rate applied to the gyro input axis
is equal the vertical
rate coupled into the gyro, the frequency
and amplitude of the table rate are related
in the following
manner.
W
B=
4A
(3-11)
0
(h-y) w(ie)h
Under the conditions of Equation 3-11, the effect of horizontal earth rate may be neglected
because
it can be separated
out
of the data .
. The torque of the gyro float with respect
the input axis,
axis nearly
moments
axis,
to its case about
H wT' is produced by the table rate about an
coincident with the gyro output axis.
of the gyro float with respect
Equation 3-12 is obtained.
DECLASSIFIElJ
-56-
Summing.
to its case about the input
DECLASSIFIED
~ M(IA)
=
wT H
2
+ P Ig(IA) Ac-f(IA) + P Cd(IA) Ac-f(IA)
+ Kc-f(IA) Ac-f(IA)
=
0
(3 -12)
Equation 3-12 assumes
that wT is perpendicular
the total table rate is transmitted
about the gyro's
output axis.
and rearranging,
Substituting
=
wc-f(IA) for P Ac-f(IAL
the angular
velocity
_H
__
W
T Ig(IA)
p2 + P
The following numbers
of
to its case about the input axis.
_P
* Gyro
from the gyro case to float
Equation 3-12 describes
the gyro float with respect
wc-f(IA)
*
to H, and
C
(3 -13)
K
d(IA) + (IA)
Ig(IA)
Ig(IA)
are applicable
for a 2FBG-6F
single-degree
.
float tracks the case for output axis rates below fivehundred radians per second as previously noted.
DECLASSIFIEl>
of-freedom integrating gyro.
gram em
second
= 2 x 106
H
2
dyne em
radian _:.
/ second
dyne em
radian:,;/ second
.2
gram em
Ig(IA)
Ig(OA)
=
3
2 x 10 .
gram em
2'
dyne em
radian
Substituting numbers and combining Equations 3-5, 3-13, and
3-6,
A e-f(OA)
=
1
P(10-3 P
+
[A
1} (h-y)
w
T
2
P wT 4 ~ 10
--------,,-------PECLASSITI¥p + 106p +
0.2 x 106
+.
(u) M(OA)
2 x 106
]
(3-14)
-58-
DECIJlSSIFIE~
W
Ac-f(OA)
P 2 x 10 -3
T
-[A
P
(h-y)
~
+
(u) M(OA)j
2 x 106
5P + 1
(3-15)
W
Substituting
A
AT for '::
from Equation
3-9"
c-f(OA) -
(3-16)
Substituting
into Equation
A
c-f(OA) -
the earth rate coupling constraint
of Equation
3-11 .
3-16" .
4 A(h
-y
)
W
0
sin
W
0
w(ie)h
+
T
[A
(h-y)
(u) M(OA)j
2 x 10-3 P
5P+1
(3 -17)
2 x 106
-59-
DECLAsstFlED
The angle between the gyro float and case about its output
axis" Ac-f(OA)" is sensed with the gyro ducosyn.
laboratory"
radians)
incremental
can be measured
vertical
of arc (5 x 10-7
angles of 0.1 seconds
with the gyro ducosyn.
from Equation 3-17" in order to record
In a benign
Therefore"
the component of
table rate coupled to the gyro input axis at 45 degrees
latitude"
>
5 x 10-7 w(ie)h
4
w
o
=
6.6
x 10-12
w
o
(3-18)
But" from Equation 3-1 7" in order
of vertical
to separate
the component
table rate applied to the gyro case from the com-
pc:>nentapplied to the gyro float about ~ts input axis"
A
. >
(h-y)
2 x 10-3 w
o
DECLASSrFlLtl
-60-
(3 -19)
Substituting
into Equation 3-18,
_.
DECLASSlFIEIJ..
w
o
< (1.7
-6 1/3
x 10)
=
1.2
x 10-
2.
radIans
second
(3-20)
Substituting
into Equation 3-18, the minimum
detectable
A(h_y) .
is
A(h -y)minimum
measurable
=
2.4
x 10-5 radians
= 4.9 arc seconds
(3-21)
Substituting
into Equations
3- 9 and 3-11, the optimum table
angle and angular rate are defined.
A
T
=
2. 3 x 10
-2
-2
sin 1. 2 x lOT
(3-22)
Since the maximum table angle achieved is 2.3 x 10-2 radians,
the assumption
of small table angles holds,
Equation 3-7 to 3-8 is valid.
separation
and the expansion from
The sinusoidal
of the angular velocity components
-61-
table rate allows the
applied to the gyro
DECLASSIFIED
input axis.
The fact that the change in horizontal
coupling is the second harmonic
gyro coupling is in quadrature
amplitude
earth rate
of table rate and the internal
with table rate allows the
of these effects to be made equal to the component
of table rate proportional
to A(h _y)' and yet they can be
separated.
The equations indicate that A(h_y) can be reduced to less
than five seconds of arc by this method.
minimized,
the north vertical
sensor
null, or if this is not possible,
vertical
sensor
3-1 for a known latitude
3.2.0
A(
yg-y
should be brought to a
the angle output of the north
can be recorded.
be used to recompensate
When A(h _y) is
This is A(h_y) and should
the east gyro on the basis of Equation
relocation.
)
The angle between geographic
input axis can be determined
with the gyrocompassing
can east-west
region.
by east-west
system.
average with accuracies
east and west,
averaging
system
to determine
gyros
in the low arc second
system
should be able to
yielding the same coefficients
the east seeking gyro as a single component.
that follows applied east-west
techniques
Single state-of-the-art
A complete gyrocompassing
gyrocompass
east and the east ,gyro
averaging
A(y _y) and R.
,g,
.
The development
techniques
Numerical
"
DECLASSIFIED
on
to an entire
calculations
are
DECLASSIFIED
not presented
because
the process
depends mainly on the
sta.bility of the east seeldng gyro during the averaging
val.
Mathematically,
A(y _y) is determined
inter-
as follows.
g
Since A(h _y) is small,
nearly in the horizontal
mation performed
system forces
the input axis of the east gyro is
plane.
The angular velocity sum-
in the east gyro of the gyrocompassing
its input axis to deviate from geographic
by A(y _y), due to residualllR"
torques.
east
~athematically,
g
the east gyro's
angular velocity summation
=
- A(y _y) W(ie)h + ~
g
By observing
approximately
east,
is operating
(3-23)
0
the absolute orientation
when the gyrocompass
is
of a mirror
surface
with the east gyro input axis
and then obs erving the same mirror
when the gyro input axis is approximately
west,
surface
A(y _y) is
g
.determined.
With the system
on the rate table"
to reach a steady state orientation.
tion 3-23" the east equilibrium
system
the gyrocompass
From Figure
orientation
is allowed
3-1 and Equa-
of the gyrocompassing
is
.
- w(ie)h A(m_y) - w(ie)h A(y~~)
DECLASSJ.'J: J..t&D
R
+ H = 0
(3-24)
The system
is next. chan~~~ffi~r~Dgyrocompass
mode
to position mode of operation
and rotated
approximately
hundred and eighty degrees.
The system
is then stabilized,
KAE reversed,
to the gyrocompass
and returned
mode.
one-
From
)
Figure
3-1 and Equation
equilibrium
3-23,
it is seen that the east gyro
equation when gyrocompassing
west is
(3-25)
Since A(m_y). is a constant,
added to yield
(y -m)
2
Substituting
A(m _y).
east,
+A
g
~ into Equation
In order
]
(-y
g
-m)
3-24 or Equation
(3-26)
3-25 yields
to align the east gyro input axis with ge~graphic
a compensation
generator
3-24 and 3-25 may be
~.
W(ie)h[A
"
Equations
current
is applied to the east gyro torque
to reduce A(y _y) to zero .
.
g
~ECLASSIFIED
-64-
DECLASSIFIED
=
R
(3-27)
-H
With the co:r:npensationcurrent calculated by Equation 3-27
applied to the y gyro torque generator" the east-west averaging
technique of Section 3. 2. 0 may be repeated to be sure that
"
A(y g_y) is withln the design requirements.
'3.3.0
Laboratory Optimization of Wheel Speed Modulation
In an o~erational system" wheel speed modulation is I
used with sample data techniques to determine low level torque
changes in the east gyro and to recompensate the gyro.
This
technique depends on a low value of torque uncertainty being
introduced when the east gyro wheel speed is cut in half.
The
wheel speed modulation technique depends on an initiallaboratory calibration primarily optimizing gyro wheel power at both
wheel speeds.
This section discusses the initial laboratory
optimization procedure.
Section 4. 3. 0 presents data recorded on a gyrocompassing
system using wheel speed modulation.
Section 5. 2. 0 indicates a possible operational procedure
which makes use of wheel speed modulation.:
If the steady state gyrocompass east gyro wheel speed is
.
DECLASSIFIEn
-65-
DEe
cut in half,
.
Equation ~~Imf:&ges
to Equation
3-28.
(3-28)
W
m is the drift rate introduced
in the east gyro due to the
gyro wheel speed being cut in half.
Am w(ie)h is the horizon-
tal component of earth rate necessary
and i
c
have not changed,
autocollimator
orientation
=
W
m
the angle A
for the gyrocompas
optimized
zero.
•
Since R
m
(3-29)
m
can be measured
which s ens es the variation
will be almost
m
w(ie)h
in azimuth mirror
equalized
at both speeds
East gyro wheel conditions
if the gyrocompass
with the
s at both gyro wheel speeds.
Gyro wheel power can be properly
W
W
it is seen that
Am
In the laboratory,
to cancel
orientation
so
are
does not vary when
the east gyro whe~l speed is cut in half.
To see how wheel speed modulation
can be used to determine
DECLASSIFIED
-66-
Equation 3-30 describes the closed loop angular velocity
summation performed by the east gyro in the gyrocompass
mode at normal wheel speeds.
(3-30)
If R changes to R + AR, the following equation describes
the closed-loop gyrocompass performance.
S
R + 6. R' +.
H
lC
TG
fI
-.A
(yg-y)
w
(ie)h
=
0
(3-31)
The 6. R only produces an azimuth error in the gyrocompass
system and, therefore,
cannot be detected in a closed-loop basis.
If the gyrocompass loops are opened and east gyro wheel speed
cut in half, Equation 3-32 describes the angular velocity summation performed in the east gyro.
DECLASSIFIED
-67-
DBCLASSIPIED
+ ~R)
. Z{R
H
...
2. i
STG
C
~
- A(
n
Yg-Y ) w(' Ie )h
...
W
my
=
0
(3-32)
If the azimuth gyro is properly
constant.
Combining Equations
compensated,
3-30,
that the open-loop east gyro drift,
w
By recompensating
=
Yg -y
) is
3-31, and 3-32 shows
'
my
at half wheel speed is
equal to the change in the east gyro residual
wmy
A(
term
AR
II
(3-33)
the east gyro on the basis of open-loop
..
STG t . STG + A R' th
drl.ft rate an d ch anglng
lC lr
0 lC lr
-rr-' e varIa. t'Ion
in the east gyro residual
zero,
A(y _y) returns to
g
and Equation 3-30 again applies to the closed-loop east gyro.
performance.
term is compensated,
It is observed
be detected and compensated
3. 4. 0 Accelerometer
that changes in ic and STG ca~ also
for in this manner.
Location
The location of accelerometer
input axis,
scale !actor,
and bias determination
can all be evaluated in the laboratory
conventional methods.
With the autocollimator
DECLASSIFIED
-68-
by
defining the azimuth
~ECLASSIFIED
mirror
orientation .. a four-point
will determine
calibration
in the laboratory
the beta matrix which is stored
computer for future reference.
DtC1.ASSIl:TED
-69-
in the guidance
DECLASSIFIED
IV
SYSTEM AND INSTRUMENT
Representative
PERFORMANCE
data on the stable base performance
of a
gyrocompassing system c,onsisting of three 2FBG-6F singledegree-of-freedom
gyros and one Kearfott two-axis pendulum
is analyzed in Chapter IV.
These, data. are presented to permit an evaluation of gyrocompassing un certainties
as a: function of system bandwidth
and to determine the effectiveness of the' wheel speed modulation technique.
Once gyrocompassing uncertainties
as a
function of system bandwidth are defined in a benign environ(
ment, an operatidnal gyro drift detection and recompensation
I
procedure can be derived for a more realistic
environment.
These data also permit an evaluation of the individual instruments in a system environment.
Two samples of data will be analyzed, (1) four-hundred and
, twenty-eight hours of steady state stable base data at two system
bandwidths;
(2) two-hundred and sixt:y-eight hours of steady
state data utilizing wheel speed modulation to update the east
gyro compensation.
4. 0.1
Environment
Before proceeding to the analytical background and
.t)ECLASSIFIEI>.
-70-'
DECLA
analysis of data" the environment" which was chosen in order
to determine
component capabilities"
must be defined.
For
the recording of these data" the system was operating on a
seventeen-ton concrete slab experiencing lateral accelerations
in the micro g region.
*
The system is designed to provide
the proper environment for the operation of the 2FBG-6F gyros
and Kearfott pendulums.
uncertainties
The region of interest is torque
of O. 0012 dyne-centimeters"
of 0.01 meru" O. 00015 degrees
to angular velocity uncertainties
per hour.
which correspond
In this area" gyro performance is a function of the
electronics used to power and control the instrument as well as
the accelerations
and temperature present.
Over-all system
accuracy is a measure of the performance of the instruments
the controlled system environment.
in
System data such as that
of a stable base gyrocompass can often be separated to give an
indication of the individual instrument's
performance.
These
data" in turn, can be correlated with instrument history" age,
and variations in environment to provide the basis for changes
in instrument and'system design.
The data that follow were recorded on the 2-16 gyrocompass
where instrument temperature
degree Fahrenheit.
is controlled to better than O. 04
The east gyro is operating with its input
* Measurements
with wide bandwidth accelerometers
defined the accelerations
r en
DECLASSIFIED
-71-
have
DECLASSIFIED
axis approximately
five meru.
vertical
east and a total compensation
The fact that the east gyro's
makes this instrument's
sitive to gravity torques.
of the three-gyro
performance
output ,axis is nearly
torque summation less sen-
It is a necessity
gyrocompass
requirements
of less than
in the operation
that the east gyro, whose
are two orders
of mcagnitude better
than the north or azimuth gyro, be positioned in the optimum
orientation
system.
to act as the basic reference
in the gyrocompassing
The a'zimuth gyro is compensated
which is approximately
acceleration
seven-hundred
is acting perpendicular
for vertical
meru.
earth;rate
One gravity
to the azimuth gyro's spin
and output axes" which are horizontal.
The north gyro's uncertainties
they do not seriously
system.
are not analyzed because
affect the accuracy
of the gyrocompassing
*
4. 1. 0 Bandwidth" Instruments,
and Environment
The design of an effective gyrocompass
a'compromise
or optimization
uncertainties
and the acceleration
The- interpret~tion
and estimation
~c
.
between the system's
of instrument
environment
errors
of specific spectral
this statement.
D:ECLASSIPlED
instrument
during operation.
on an uncertainty
characteristics
l
Section 5. 1. 0 supports
is largely
basis
provide one
I>ECLASSIFIED
set of bounds defining the lower limit on system bandwidth.
"Acceleration
enviroment in a fixed base produces uncertain-
.. ln angu Iar measurement
t les
~c
in system operation which define the upper frequency
on system bandwidth.
estimate
of lateral
The data presented
acceleration
**
••
and lnduces
dynamlc errors
inputs
J
limits
together with an
are used to -identify
J
an area of general design interest.
I
In a system operating
.
sample data techniques
periodically
J
and an integrator
recompensate
recompensation
process
over a prolonged period of time,
the gyros.
procedure
***
The frequency
depends on the accuracy
the bandwidth qf the gyrocompassing
the spectrum
instrument
of instrument
uncertainties
J
on system performance
in this chapter.
uncertainties.
to
of the
of the
system
and
J
The spectrum
of
and the effect of these uncertainties
as a function of bandwidth
J
Chapter V derives
are defined
a gyro recompensation
cedure which could be used in a more realistic
update the compensation
are required
to gyros with similar
environment
spectral
proto
charac-
teristics.
,,'<
AppendixII defines the spectrum of angular measurement
uncertainties as a function of lateral accelerations.
*~'< Chapter
V indicates that uncertainties
in angular measurement.
which limit the bandwidth of gyro drift evaluation
place more
severe restrictions
on system bandwidth than dynamic angle
uncertainties.
The uncertainties in angle measurement
define
the time constant of the vertical sensing device (i. e. the critically damped gyrocompass time constant) ..
J
J
*"c .....
The integrator's
low sensitivEY does not affect the stability
the gyrocompassing system.
~Cl.~~~TFTR
"
"l"
of
4. 1. 1 Instrument
Uncertainties
The effect of instrument
azimuth angles can be determined
uncertainties
on east and
from Figure
4-1.
steady state azimuth angular velocity summation
wh~n (u)wz + KAE Ay
=
=
compassing
O. Therefore"
system
z
=
is satisfied
only when -A
z
w(. )h + (u)w
le
y
the equilibrium
angles of the gyro-
are
A
A
The
0., The steady state east gyro's
angular velocity is satisfied
,
- KEE Ay
*
y
=
1
(u)wz
KAE
(4-1)
KEE
--[
(u)w + -K
(u)w]
w(ie)h
y
AE
z
Equation 4-1 indicates
(4-2)
that the output of the east vertical
\
sensor
is proportional
to azimuth gyro drift.
in the output of the east vertical
frequency
sensor
range of the gyrocompassing
Therefore"
changes
which occur withi.n the
system
are proportional
~!<
· Chapter II: contains the justification of Figure 4-1. In addition"
Chapter II gives a detailed development of the dynamic as well
as the steady state changes in east and azimuth angles due to
instrument uncertainties.
(Equation 4-2 is a repeat of Equation
2-3. )
DECLASSIFIED
-74-
r--------P
I
>-------l
I
~t
0::
0
~
~
-I
-I
0
~t
0
0
I-
:::>
<{
i
~I~
-
o
lO.ciE
.
~
I
a
0::
0
0
~
I
I
I
I
I
IL ______
_10..
N
-3';
:c
.-
:J
~
N
«
::s
00.
,
-Ia.
L€..3
+
..J
0::
W
l.1..
W
-I
0...
I-
o
lO..ciE
I
I
I
I
llJ
w
1
J
0::
0::
~I'-
.J::
Ci)
~
~
<{
~
J
<{
<t
W.
a::
0
C/)
Z
W
C/)
...J
<1:
U
i=
0::
W
>
IC/)
<{
W
W
-
<{
..
-75-
::s
W
W
I
q-
DECLASSIFIED
to uncertai~ties
in azimu~h gyro performance.
As previously
formance
noted, uncertainties
in the east gyro per-
only produce azimuth angle errors
compassing
system.
in the gyro-
By combining Equations
4-1 and 4-2,
'it is noted that steady state east gyro performance
extracted
from an appropriate
summation
can be
of azimuth and
east angle variations.
(4-3)
4.'1.2.
Spectrum of Instrument
Uncertainty
Section 4. 1. 1 has only discussed
angular velocity summations
east gyros.
instrument
in the azimuth and
The words "steady state" in the analysis
uncertainties
to uncertainties
frequency
performed
the steady state
in the gyrocompassing
system refer
which occur at a frequency below the break
of the system.
For data analysis,
to divide the total spectrum
ties into three regions
Region 1:
of
of possible
it is instructive
instrument
uncertain-
(Figure 4-2).
Instrument
Uncertainty
When the frequency
is above the natural frequency
Frequency>
of instrument
of the gyrocompassing
DECLASSIFIEP
W
o
uncertainty
system,
S
I
Q)
~.ro
ro~
CI.l
H
CI.l
~
~2
~
c.> tf.lor-!
I-+J
(])
S
~ ~"O
:;:jro Q)
-+J
~-+J
~Q) ~
~CI.l
ro
H
.~"O Q) 0..
ro CI.l•
:>0..
+>(])(])
o
H ro roor-!
~o
ro c.> +>:;:j
tf.l Q) ~c.>
CI.l 0
S::~~Q)
(]) H
or-!+>
::s
or-! ~
r-i+>o~
c.>b.O
ro
ro
s::
Q)
S::CH
:;:jtf.ls:: H
Q) 0
"0 OJ ro CH .
::s
~-+J.
c.> Q)
(]) ro
S
Z
0
-
(.!)
w
0:
>-
(]) !:l
Hor-!
()
Z
W
~&
::>
.
Q)
b.O
W
s::
ro
H
Ct:
(\J
~
c.>
>-
I-
Z
«
a..
~
CI.l
"0
!:lroor-! ~ ~Q)
H+>.
0
-+J
3
C\J
CJ
LL
0>:0
or-! !:l"O
en
en
Z
0
(.!)
w
0:
s::
(])
&
(])
H
tH
S::s
~
a::
or-!
"'0
W
(])
~
(.)
ro
ro Q)
roQ)r-f
Q)b.Ob.O
or-! ctls:: s::
1jro
or-! ~ ...c
roc.>+>
tc.>::S
Q)or-! S
c.> Sor-!
~
tiS
N
::1 s:: ctl
+' ~"'O
~"'O
s::
rQ)
ro
E~+>
::s
:;:j tf.l
H"O
ctl
t;oQ)
s:: H s::
H 0.. or-!
z
-
0
(!)
W
0:
0
-r-!
b.O
Q)
H
~.
c.>
s::
(])
::s
eJi
Q)
H
CH
~
0
~
l1..
0
0
0
>- ..J
HH~
+>ctl+>
0
.~
CI.l CI.l s::
oS Q) or-!
r-fc.>Q)
ro~+>
:;:j ro ctl
"'OSH
or-!
ctl
:>Ho..
or-! 0 (j)
"'OtHro
s:: H
HQ)O
o..+>
U
Z
0
S
::s
c.>
UJ
i
0
H::s ~ -r-!
+>~b.O
UJ ctl Q)
.5c.>H
-77-
~
0
lJJ
a ~
:::>
0::::
l1..
IJ..
w
3
C\J
I
~
W
::::>
•
S
H"OQ)O
+>O+'H
.5roH~g0..
co
0
::s Q)o~
~ UJ
Q)Q)...c
ro
ctl
r-!or-!
or-! +> +' (]) ~~
s::+>
s::UJs::+>
-r-! ~ or-! CI.l -r-! s::
ctl r-i ro UJ
~
~ or-!
+'r-f
H"O
H ro H
Q) 0.-1 0 b.O Q) Q)
c.>+,
c.>+'HS::
s:: ctl
s:: s:: Hor-!
:;:j H
:;:j <U
CI.l
ro Q) UJ
+>ctl
+>roQ)ctl
s:: Q) r-i 0.. s::o..
Q) Q)
OJ
b.O
Q) s::
S ~
:;:jc.>tiSO
S
(.!)
~
<t
C\J
W
0
0:
CD
"'0 Q)
j'()
0
>-
~
~
u
0:
+>
r-fci
::s
0
c.>or-!
+>
(])
!:l ~CH bJJ
Q)0r-! H
s"O
•
Z
:::>
0
0
0
0
a:.:
<!:>
DECLASSIFIED
the effects will be attenuated
These uncertainties
in the closed-loop
do not seriously
gyrocompass.
affect the performance
of the system as long as the amplitude of the variations
duced are acceptable.
pro-
(The only exception to this is the east
gyro drift rate which is detected in an open -loop basis in a
short time interval.
Region 2:
)
Inst~ument Uncertainty
When the frequency
is near the breakpoint
difficult
to
instrument"
determin~
region" the system
if any noted disturbance
If the variations
it is
is due to a single
of these.
In this
to uncertain-
the uncertainties
The total effect of all uncertainties
above the breakpoint
by observing
repeatable
in this
data over
which is sampled at a frequency
of the gyrocompassing
between instrument
compass performance
report. )
uncertainty
system"
responding
of system performance"
system time constants
dynamic relations
o
and environments.
region can be determined
several
w
in east and azimuth angles are within the
design requirements
are acceptable.
or a combination
is simultaneously
ties in all instruments
of instrument
of the gyrocompassing
environment"
~
Frequency
system.-
performance
are covered in Section 2.3.2
(The
and gyroof this
DECLASSIFIED
Region 3: Instrument
Uncertainty
Frequency
In the range o'f frequencies
point of the gyrocompassing
system,
is obtained to all disturbances.
uncertainties
errors
o
below the break-
a steady state solution
In this region,
instrument
produce steady state east and azimuth angle
as indicated in Equations
analysis
< w
4-1, 4-2, and 4-3.
of data in this frequency
the individual instrument's
quency of instrument
of
The highest fre-
observable
one-half the sample frequency.
to d-c values of instrument
range allows separation
performance.
uncertainty
The
is equal to
This region extends down
uncertainties.
4.2. 0 Steady State Data
Table 4-1 summarizes
parameters
for the recording
the important
of two bandwidths
state data which will be analyzed.
of arc.
coupling,
of steady
The first two-hundred
and sixty hours of data were recorded
sensor-azimuth-gyro
system
with an east-vertical-
KAE' of six meru per second
This produced an over-damped,
0.0021 radian per
,~
second system,
8 A
z
8 (u)w
z
=
highly sensitive
KEE
K
AE
to azimuth gyro drift. "." The
1
w(ie)h' the higher the ratio of KEE to KAE'
the more sensitive the azimuth angle of the gyrocompassing
system is to azimuth gyro drift.
DECLASSIFIED
DECLASSIFIED
TABLE 4-1a
260 HOURS
- LOW EAST/AZIMUTH
COUPLING
6 meru per second of arc.
2 meru per second of arc.
Roots
W
b.A
(u)w
b.A
~
z
=
y
K
AE
z
z
KEE
=
=
o
=
2.1 x 10
1
-W-(i-e)-h ~
=
-3
radians
per second
100 seconds of arc per meru
286 seconds of arc per meru
- 0.165 seconds of arc per meru
DEctASSIFIE~
-80-
DECLASSIFIED
TABLE
168 HOURS
4-1b
- HIGH EAST/AZIMUTH
COUPLING
60 meru per second of arc.
2 meru per second of arc.
Roots
PI" P2 =
1.5 x 10
=
6.7 x 10
w o.
AA
~
z
z
AA z
~
y
-3
[-1 +
radians
1 - 2.1 x 10
':'1
per second
1.0 seconds of arc per meru
=
=
-2
=
286 seconds of arc per meru
=
- 0.0165 seconds of arc per meru
-81-
]
-
'DECL.ASSlflEL
second one-hundred
recorded
and sixty-eight
with the east vertical
hours of data were
sensor
azimuth gyro
coupling of sixty meru per second of arc.
lighter
damped system with an order of magnitude
in sensitivity
state data will be analyzed in two sections.
one typical two-hour period of data at both system
bandwidths will be studied to determine
of all uncertainties
two-hundred
increased
and sixty hours of narrower
effect
Second" the
bandwidth data will
and sixty-eight
hours
of
bandwidth data.
Short-Term
Figure
Stability
4-3 is a typical two-hour
azimuth orientation
of the stabilized
of the east vertical
sensor.
bandwidth.
Short-term
peak amplitude
3
member
of the
and the output
are a function of system
oscillations
damped system of Figure
recording
As one would expect" the short-
term azimuth and east variations
of 2 x 10-
the short-term
on system performance.
be compared with the one-hundred
4.2.1
reduction
to azimuth gyro drift.
The steady
First"
This produced a
4-3a.
are apparent
These oscill~tions
in the lighter
have a
of five seconds of arc and occur at a frequency
radians
per .second" slightly below the breakpoint
of the gyrocompassing
system.
Due to the large number of
dynamic solutions taking place simultaneously
DECLASSIFIEU
-82-
in the frequency
~•
~
r-f
0.-1
~
.;,..)
tI)
s~
(l)
.;,..)
I
~
0
.t::
tI)
tI)
t/l
(f)
~
::>
.0
rt>
I
o
0r;:-
(\J
u::
:x:
~
ro
~
S
O
()
0
~
~
Cj
(0
.....
I
N
M
I
~
~
-,...
Ii.
DECLASSIFIED
range,
it is difficult to attribute
particular
Figure
instrument.
these oscillations
However,
4-3 (unless uncertainties
to any
from Table 4-1 an.d
cancel during this period),
by observing the total angle change over the two-hour
an upper limit can be placed on instrument
interval
uncertainties.
Figure 4-3a
(u)wz
<
0.3 meru
(u)wy
<
0.01 meru
(u)wz
<
0.03 meru
(u)w
<
0.01 meru
Figure 4-3b
y
,. The high value of azimuth gyro uncertainty,
4-3a),
is due to the uncertainty
(u)w (Figure
z
in east angular measurement.
0.3 meru corresponds
to an output of 0.005 second of arc
from the east vertical
sensor
in the wide bandwidth system
with an east azimuth coupling of sixty meru per second of arc. '
There is nothing unique about Figure
hou~s of stable base gyrocompassing
Figure
4-3 have been recorded.
we are primarily
interested
4-3.
data similar
stability
DECLASSIF1BJ1 ..
of
to that of
The two conclusions
in from Figure
east and azimuth gyros short-term
Thousands
4-3 are,
which
(1) the
for both system
bandwidths are- wItliTri""'ihe
initia
1-1;
design criteria
of Table
(2) the higher bandwidth system has larger
short-
term dynamic uncertainties.
4.2.2
Long-Term
Stability
Data similar
averaged
to that indicated
over a forty-two
minute time interval
hundred and twenty-eight
azimuth orientation
hours.
.The first two-hundred
sensor
system
and the
are plotted in Figure
4-4 .
under
The second one-hundred
hours were recorded
, ha? a marked
values of the
and sixty hours were recorded
the conditions of Table 4-1a.
Table 4-1b.
4-3 was
for four-
These average
of the gyrocompassing
output of the east vertical
sixty-eight
in Figure
It is noted (Figure
under the conditions
and
of
4-4) that system bandwidth
effect on the long-term
stability
of the gyro-
compass.
The first two-hundred
strong correlation
sensor
and sixty hours of data indicate a
between the output of the east vertical
and azimuth angle of the gyrocompassing
period of these disturbances
is approximately
with an east vertical
amplitude
sensor
mately 0.02 second of arc.
system.
10.6 hours,
variation
With an east vertical
gyrq coupling of six meru per second of arc,
The
of appr~xisensor
aZUnuth
'an azimuth gyro
drift of 0..12 meru is large enough to produce the variations
DECLASSIFlEI}
DECLASSIFIED
M
U)
......
..
Cl
ct
U)
,.,
U.
ii:
0
~>-
a::
c:
9
0
::I:
m
::l
!a
"':
..
(ll
0
::I:
.
II:
3
::l
:<
tf.)
~
.t::
~
.ro~ .
s:
roQ
(lj
..0
b.O
Q
.~
>,
~
(lj
>
~
0
t:
~t)
ii:
Cl
0
Q)
c::
l;
~
~
Q)
::l
tf.)
:'.!
N
UJ
(lj
<
~
S0
u
0
~
>,
M
U)
......
0
<
c::
U)
'P
2
0
a::
::l
IC
::I:
0
tJ
CO
......
I
C\]
U)
N
{=
C\I
~
I
~
.
.~b.O
~
D CLASSIFIED
o
8o~S~8
d
:10 SONO:>3S
NOIJ.'1U!'1J\ HlnvtlZ'l
:;)H'I
d
~
d O. d
~ SONO:>3
J1!)
d
I
CO
CO
I
indicated in the first ~C~A1d
4-4.
Some of the probable
sixty hours of Figure
causes of, an 0.12 meru azimuth
gyro shift are indicated as follows:
Torquing supply variation:
Torque generator
0.010/0
sensitivity.change:
' 0.020/0'
Output axis torque variation:
0.015 dyne-em
Since the period of these variations
any known disturbance,
do not correlate
they are assumed
change in the torque summation
with
to be caused by a
inside the azimuth gyro.
The
azimuth gyro output and spin axis are both in the horizontal
plane.
The torque summation
is sensitive
to mass
the spin axis due to shifts in the spin axis bearing
shifts along
and/ or the
ball retainer.
When these data were recorded,
five-thousand
operating
hours.
the gyro wheel had over
Equation 4-4 indicates
the
magnitude of the 257 gram gyro wheel shift along the spin referenc'e axis, which would result
. t'
in a 0.015 dyne-centimeters
. (5)
torque varIa Ion.
d
=
1.5
x 10-2
(2. 57)(9.80)
x 104
=
5.9
'DECLASSI~D
-87-
x 10
-8
centimeters
angstroms
(4-4)
DECLASSIFIED
These periodic
shifts which are apparent
system bandwidth are quite small.
here as a point of interest
at the lower
They are reported
to show how powerful a tool
the variation
in system bandwidth is for determining
performance
of a gyrocompassing
in a benign environment.
the
system and its instruments
Whether or not the variations
in
azimuth angle noted at the reduced system bandwidth will
..
affect the system
r
s operation
depends on the restrictions
system bandwidth as a result
realistic
environment.
of lateral
in a
In any ev~nt, since thes e shifts show
up as an output of the east vertical
angle;
accelerations
on
sensor
as well as azimuth
their effect on the azimuth orientation
of the gyrocom-
passing system can be reduced by sampling the output of the
east vertical
sensor
pe:-iodically and updating the compensation
to the azimuth gyro.
It is noted (Figure 4-4) that the peak variations
angle over the first two-hundred
+ 11 seconds of arc.
and sixty hours are less than
The total azimuth gyro drift recorded
during this period was less than 0.25 meru.
determine
It is difficult to
an east .gyro drift during this time because
large variations
of the
in azimuth angle.
The second one-hundred
Figure
in azimuth
4-4 were recorded
and sixty-eight
hours of data in
under the conditions
It is obvious that increasing
of Table 4-1b.
the coupling between the east
DECLASSIFIEtl
-88-
DECLASSIFIED
.
vertical sensor and azimuth gyro reduced the amplitude
of the periodic variations
previously noted.
This is the
expected result if. these variations are a result of uncertainties in the performance of the azimuth gyro.
The
higher KAE, the less tilt about east is necessary to compensate for a change in the torque summation inside the
azimuth gyro.
For equal east vertical sensor to east gyro
gains, the lower the tilt about east, the smaller the change
inazim~th angle.
The azimuth variations were smaller in amplitude for the
wider bandwidth system, but an essentially constant azimuth
angle variation of two and one-half seconds of arc per day
is evident.
This could not be' a result of the ~zimuth gyro.
because a total azimuth gyro drift of 1.8 meru ~s required
at this system bandwidth to produce eighteen seconds o~arc
azimuth error.
With 8:neast azimuth coupling of sixty meru
per second of arc, a 1. 8 meru azimuth gyro drift would result
in an 0.030 second of arc output of the east vertical sensor.
The d-c value of the output of the east vertical sensor did not
vary by more than 0.005 second of arc, while the azimuth
angle changed by eighteen seconds of arc.
Since the output of the east vertical sensor remained
essentially constant while the azimuth angle had the constant
variation noted, it is reasonable to assume that an east gyro
DECLASSIFIED
!)EC
~
_.~
- ''-
-,.-.-_.>4._ ......
""""._,.,
...'"
A-'''- --.--.,-.--
drift produced the azrmutt-\~SJn~riati~n
~,~.~'".".'<_~~-'~
-
~
.•.
during the second
,Ie
one-hundred
and sixty-eight
hours.
'I
From Table. 4-1" it
is noted that an east gyro drift of less than 0.01 meru per
day is large enough to produce this constant azimuth angle
change.
The puzzling point from a comparison
samples
of data in Figure
the east gyro drift,
of the two
4-4 is that there is no reason why
or the effects of this drift" should be a
function of system bandwidth.
A computer analysis
two-hundred
of the data indicated that the first
and sixty hours of data had a constant variation
of 0.4 seconds of arc per day.
In addition,
a constant vari-
ation of O.0028 seconds of arc per day was noted in the output
of the east vertical
sensor.
The sense of the constant change
~
in the output of the east vertical
sensor was in such a direc-
. tion that it canceled part of the constant azimuth variation
above O.4 seconds of arc per day.
Using the azimuth east angle
coupling of Table 4-1a and adding these effects"
it is observed
that O.68 seconds of arc per day azimuth variation
been realized
remained
if the output of the east vertical
constant .. This was in disagreement
would have
sensor
with the 2. 5
seconds of arc per day data of the second one-hundred
sixty-eight
hours and corresponds
to a possible
had
and
east gyro
,Ie
'I
Equations
4-1 and 4-2 ma~.~~_atically
make this same statement.
constant variation
of O.0024 meru per day.
In spite of
I
this apparent
and frequency
discrepancy,
of instrument
from the data of Figure
point,
conclusions
uncertainties
4-4.
spectrum
From an instrument
view-
bandwidth system.
The low
to be, east gyro drift < O.01 meru
of what appears
per day indicates
that many hours can elapse between sub-
sequent recoinpensations
of this gyro.
Wheel Speed Modulation
Wheel speed modulation
over a two-hundred
,passing system.
alternately
hour interval
The east gyro 'compensation
easily be programed
Section 4. 3. 1 contains
method may proceed
The procedure
of S"ections 4.3.1
the analytical
us ed to
background
and 4.3.2.
of how
was used in the benign laboratory
detect changes in the torque
who is primarily
which could
to the east gyro and data recorded
is the subject
wheel speed modulation
was updated
following a procedure
into a computer.,
update the compensation
to detect
of the east gyro in the gyrocom-
by two engineers
during this period
was used periodically
and sixty-eight
changes in the performance
reader
can be obtained
it is noted that the azimuth gyro should be recompen-
sated hourly in the narrower
4.3.0
on the amplitude
summation
interested
in the east gyro.
The
in data and not background
di~~ctly, to Section 4.3.2
DECLASSIFIED
to
with no loss in
DECLASSIFIED
the results
obtained via wheel speed modulation
This test appears
to indicate that wheel speed modu-
lation can detect changes in the performance
gyro in the gyrocompassing
system.
was conducted in an unrealistically
the transfer
of this system
condition is a major
step.
background for the transfer
4.3.1
technique.
of the east
However,
the test
benign environment
and
and technique to an .operational
The preliminary
analytical
is covered in Chapter
V.
Wheel Speed Modulation Theory and Test
Before the test was started"
east gyro compensation
was adjusted so that the azimuth angle of the gyrocompassing
system
did not vary when the east gyro wheel speed was cut
in half. >:~ Under these condit.ions" Equation 4-5 describes
angular velocity summation
the
of the east gyro.
Full East Gyro Wheel Speed
(4-5a)
~:~
Section 3.3.0 discusses the initial laboratory optimization
of wheel speed modulation which this condition establishes.
,
. DLCLASSIFlEIJ
nECT.ll
.
East Gyro Half Wheel "Speea.SSIFIED
2 R
- A zo w(ie)h
0 + 2'
+ --nIC
S
TG
--n-
+w
m
=
0
(4-5b)
Gyro wheel power was initially
speeds so that
nearly
W
m
~.
equalized
the modulation
at both wheel
induced drift rate~ is
zero.
In the closed loop gyrocompass~
residual
term produces
a change in the east gyro's
a change in azimuth
angle.
(4-6)
The following procedure
sixty-eight
was used over two-hundred
hour$ to determine
if wheel speed modulation
could detect changes in the east gyro residual
term in the
benign environment.
During the test~ an automatic
collimator
the azimuth orientation
member;
monitored
however,
this independent
not as a source
recompensate
gy.zECLASSlFIE
-93-
auto-
of the stabilized
data source was used
as a check on the test,
th~ east
and
of information
to
Step #1
Two times per day the output of the east vertical
was forced to zero by recompensating
sensor
the azimuth gyro.
Step #2
After the azimuth gyro was recompensated,
transferred
from the gyrocompass
mode of. operation.
wheel speed,
the system was
mode to the gyro stabilized*
With the east gyro operating
at normal
the loops were left open for T 1 seconds.
end of T 1 seconds
the output of the east vertical
l
At the
sensor
is
equal to
T1
2
1. 5 x 10-
-+ i
~ (-A~l w(ie)h + ~1
S
TG)dt
sw H
+ ic S~G
2 T1 T1
(1.5 x 10)-2
5S
o
Wz
w(ie)h dt 2
0
(4-7)
,I,
"."
Gyro stabilized.
There is no connection between the vertical
sensors and the gyro torque generators in the gyro stabilized mode
of operation, but all gyro drift and compensation.'remain
as inputs
to the gyros.
** w(ie)h
= 2~6 me~: per second
Meru x 1. 5 x 10
of arc at 45 degrees
latitude.
= seconds of arc per second of time.
DECLASSIFIED"
The first integral
is a result
east gyro at time zero.
of angular
velocity
in the
The second double integral
is
derived from the open -loop azimuth gyro drift coupling a
horizontal
component of earth rate into the east gyro.
is, principally,
the uncertainty
east gyro torque generator
loop gyrocompass.
Prior
Eq:uation 4-6 described
in the signal applied to the,
between the closed and opento opening the gyrocompass
the angular velocity summation
formed in the east gyro, where A
R
o
isw
zl
= A Zo
loops,
per-
+ AA , and Rl
Z
=
+ AR.
Substituting
Equation 4-6 into Equation 4-7,
T
1. 5 x
1 0 -25"~
1
sw
STG dt ,------H
o
(4-8)
For a constant azimuth gyro drift rate during T 1 and a
constant change in the east gyro due to opening the gyrocom-
DECLASSIFIE14
pass loops"
(4-9)
Equation 4-9 describes
the output of the east vertical
sensor
after T 1 seconds . At normal wheel speed" this angle is the
result
of an angular velocity component switched in when the sys-
tem is transferred
from a closed-loop
to an open-loop system and
an angular velocity component porportional
to the azimuth gyro
drift.
Step #3
After T 1 seconds were used to evaluate the open-loop
output of the east vertical
sensor
at normal wheel speed" a
~'c
tight leveling loop
was closed between the east vertical
and the east gyro.
The gyro wheel speed was cut in half and T 2
seconds were required
rium condition.
reference
until the east gyro reached
sensor
an equilib-
Since the azimuth gyro has been the azimuth
during Steps #2 and #3" a change in azimuth angle
has coupled a change in the horizontal
earth rate applied to the
~~ Leveling Loop: east gyro torque generator signal derived
from the east vertical sensor.
Azimuth gyro open-loop.
P.a:. \"L.n~SIFIED.
east gyro.
At the end of T 2" the total change in azimuth
DECLASSIFIED
angle is
Az(T2>
=
2
1. 5 x 10-
T1+T2
S
W
(4-10)
z dt
o
Evaluation
of Equation 4-10 for constant
azimuth
gyro
drift is
(4-11)
Step #4
At time T2" the east leveling loop is opened.
east gyro operating
describes
at half wheel speed,
the output of the east vertical
With the
Equation 4-12
sensor.
DECLASSIFIEl1
(4-12)
DECLASSIFIED
Now A
J
z3
is equal to the azimuth angle at the beginning
of the wheel speed modulation
test plus any angle accumu-
lated since the test started.
(4-13)
Also" if any change in the east gyro's
occurred
since Equatlons
- (A
z
) w
o
term
4-5b and 4-6 applied"
2 R
+
:(ie)h
residual
-<r""'T 0
n
S
+ 2
1"
+ w
TG
c .H
=
m
0
(4-14)
Remembering
.6.. R" Equations
H
that A
zl
= A Zo +
6.A , and that ~A
z
z
we.1e)h
=
4-11 a~d 4-14 combine to
T
S
+ 2 i
sw
TG)dt
H
- (1. 5
2
x 10- )
2
.
3
SS
2
Wz
w(ie)h dt
T1+~2
(4-15)
DECLASSIFIED
Equation 4-15, and making (T3-(T 1 + T 2» equal
Integrating
I
to T 1) (i.e~
I
times to evaluate east angle at both wheel speeds
ar e equal)"
-2
-2
1.5 x 10 [(-1.5 x 10 w(ie)h Wz (T1 + T2)T1
(4-16)
A (T3) is the output of the east vertical
E
sensor
when the east
gyro is operating
at half wheel speed and the leveling loop is open
for ~3 seconds.
AE(T 1) is the output of the east vertical sensor
when the east gyro is operating
loop is open for T 1 seconds.
at full wheel speed and the leveling
Adding -2 AE(T 1) to AE(T 3), Equation
4-1 7 is obtained.
+
AR T
H
1
+
DECLASSIFIEQ
-99-
2
-2
' T1,
1.5 x 10 Wz W(ie)h -2-)]
(4-17)
Rearranging
Equation 4-17,
DECLASSIFIED
+ 1.5x10
-2 .6 R
(4-18)
trT1
Since we are trying to detect a change in the gyro residual
t~rm" ~ R" it is seen from Equation 4-18 that by adding two
times the angle measured
measured
at the full wheel speed to the angle
at half east gyro wheel speed" the switching
rent has canceled.
Also" the coupling of horizontal
cur-
earth rate
into the east gyro" due to azimuth gyro drift" is partially
canceled.
The sum of the angles indicated
in Equation 4-18
, propor .t'lona It 0---:fr'
.6.R'
IS
Step #5
On the basis of the angles measured
in Equation 4-18, the
east gyro cOlnpensation was changed by ~ R .
speed changed to normal
This technique
and the gyrocompass
cannot distinguish
east gyro residual
term,
, .
loops closed.
between changes in the
.6 R, and the earth rate coupled into
the east gyro due to the azimuth gyro drift.
4-18" the mInImum
East gyro wheel
d.PtCLA~S111En
etec1aoTh1r"~S
f
From Equation
.
a unctlon
0
f th
e open
loop azimuth gyro drift.J;attJ
.
DE CLASS
w .can be calculated .
lr1
.
Z
.6.R
Hw z =
(4-19)
Typical values of T l'
are three minutes
T 2' and T3 in a benign environment
each .. Substituting
x 10-2
1.42
The possibility
of utilizing
into Equation 4-19,
this method in an environment
other than the benign laboratory
depends up.on'the open-loop
azimuth gyro drift as ,well as uncertainty
ments.
4.3.2
(4-20)
Thes e are the subj ects of Chapter
in angular measureV.
Wheel Speed Modulation Data
Section 4.3.1
developed the wheel speed modula-
tion technique used for the recording
the wheel sp'eed modulation
test,
of these data.
During
the system was operating
under the wide bandwidth conditions
indicated in ,Table 4-1b.
DECLASSIFIED
and the parameters
.
DECLASSInED'
Figure
.
gyrocompassing
system
speed modulation test.
recompensation
modulation
of the
during the eleven day wheel
of
2:
had a
six seconds of arc due to
uncertainties.
However,
east gyro recompensation
the wheel speed
procedure
the steady state azimuth angle variation
did remove
previously
noted.
4-5b is a plot of the total east gyro compensation
change applied as a result
test.
'
It is noted that the system
peak azimuth variation
Figure
<
4-5a ~s a grapn of the azimuth variation
of the whe~l speed modulation
It is noted that this compensation
meru per day, which is similar
performance
previously
system data of Figure
to the steady state east gyro
predicted
4-4.
has a slope of 0.007
from, the wide bandwidth
These data are redrawn
Figure 4-5c as a source of data comparison
angle variation
of the gyrocompassing
in
of the azimuth
system with and with-
out wheel speed modulation.
It is noted'that
wheel speed modulation
removed the
steady state compon'ent of azimuth angle variation.
the' recompensation
variations
technique introduced
more short-term
in azimuth angle.
This was the first wheel speed modulation
on a system basis,
test att,empted
and it is believed that future tests
reduce the azimuth variations.
a vertical
However,
These future tests will utilize
sensor w'ith a longer time constant,
DECLASSIFIED
-102-
can
reducing 'the
c
0
tn
L.f")
I
~
..
Z
0
~
<!
....J
::>
I
I
I
I
~
Q
I
0
w
W
0-
en
-'
w
DECLASSIFIED
..
L:J
W
~
a::
::>-
::>
::>
C!)
e.!)
(!)
I
LL
1J...
I
z
L1..
0
t-
..
<1
I
)(
I
I
..J
I
I
I
I
0
LtJ
fZ
I
v
::>
0
0
...,..
I
0
LrJ
2
lLJ
0-
0
OO
t-
1
«
I
IJJ
::>
w
I c
:z:
3:
'0
2
1
IU
W
::>
0
I
..J
I
W
:c
...J
..J
3
0..
<!
W
a.
3:
t1..
en
....<!
z
en
<t
0..
-2
0
I
Z
W
0
f<t
a..
f-
c::
u-
Z
:?:
0
0
~
:c
u
>-
l-
0
~
>-
(!)
<:{
....
-v
I
I
I
J:
I
f::>
I
:?E
I
N
W
<t
I
<t
N
I
I
en
f-
-It)~
I
~
e.!)
::>
0.::
I
<t
a::
~
0
>
Cl
w
0
en
<t
I
>-
-(D~
:J:
z
(f)
en
I
w
z
2
0
-,.....
I
en
u..
I
I
0-
W
::>
I
w
w
;';;;'.0)
I
0
l1J
0
.-- en
I
~.
e.!)
W
I
0
0
::>
...J
0
I
CJ)
en
IJ_
..-«
-
W
fl.
':;>
;.;>
I
.2
IJJ
:c
z
c.!)
Cl
Lu
I
r
..J
..J
0
,
~
-rt>
-C\J
I
CD
-I
I
I
C\J.
I
I
0
C\J
.+
JHtI
0
C\J
I
.::!O SONO::>3S
,.....
,.....
0
0
0
I
0
+ n~3tAJ
DECLASSIFIED
.
0
C\J
+
0
f
0
(\J
I
::>H'iI :10 SONO::>35
-0
DECLASSIFIE
uncertainty
.
in angular measurPment.
computer will replace the engineers
test,
with a resultant
reduction
In addition,
used for this initial
in many uncertainties.
The initial wheel speed modulation test appears
demonstrate
variations
the capability
a
to
of detecting low level torque
in the east gyro of a gyrocompassing
operating in a benign laboratory.
D!:CLASSIFlEIl,
-104-
system
DECLASSIFIED
V
OPERATIONAL SYSTEM EVALUATION
In order to use the gyrocompassing
refer'ence"
gyro drift must be detected and compensated
an operational
system.
Chapter IV has presented
indicate that the short-term
stability
does not produce appreciable
"c
errors
for in
data which
of state-of-the-art
gyros
in the gyrocompassing
-
system."
Therefore"
reference
over a tim'e interval
the system can be used as an absolute
01 a few days with no gyro recom-
However" since the proposed system Is operational
pensation.
requirements
long-term
system as a long-term
could be extended over a period of several
gyro drift must be compensated
years
J
for in the gyrocom-
passing system.
Compensation for gyro drift is primarily
the gyro drift by incrementa~ measurements
the gyrocompassing
vertical
sensing devices such as pendulums and electrolytic
The sensitivity
zontal accelerations
*
of sI?-all angles.
In
system operating in a benign environment"
are capable of incremental
of arc.
a problem of detecting
angle measurements
of these vertical
will increase
levels
below 0.01 seconds
sensing devices to hori-
the noise in the gyrocompassing
If the system bandwidth is such that the steady state azimuth
gyro drift - azimuth angle coupling is less.than one-hundred
seconds of arc per meru.
DECLASSIFIEP
-105-
system when operating
increase
in a perturbed
'environment.
the size of an angle necessary
lent signal to noise ratio.
A vertical
This will
to produce an equivasensing device which has
a first order lag will be used to filter out the higher frequencies
of lateral
acceleration.
If the time constant of the vertical
sensing device is one-third
that of the gyrocompassingsystem"
a third order critically
damped system closely approximates
system characteristics.
"e::
Typical gyrocompass
"I
the
time constants
between 100 and 500 seconds will be investigated.,*:.:e::
Chapter V discusses
the parameters
development of a recompensation
ment.
The chapter provides
to be considered
procedure
in a realistic
insight i:nto the problem"
f~rm solution is not obtained for two reasons"
the low frequency spectrum
able;
perturbed
a
of the gyrocompassing
environment
the firmest
I
data on
is not availavailable;
s performance
in the
solution to this problem.
North Gyro Compensation
Figure 5-1
;'c
provides
system
analyzer
environ-
b':lt a closed
(1) sufficient
accelerations
(2) the system is the best environment
opt~ization
5.1.
of horizontal
in the
***
is a simplified
'
drawing of the north loop
Chapter II develops this theory.
~(~(
Vertical sensors with time constants
seconds are commercially available.
*~*
· ... Throughout
.
between O.1 and 500
this entire paper we have assumed that the north
.gyro is used prima:r:-ily for leveling purposes and" therefore" is
of negligible importance in the ,analysis of the gyrocompassing
properties of the system.
----,
1-----
I
12
I
I
10
Ii=
1«
I
I~
e
l-l
lroo
<!
I
>
>
(.!)
11-0::
I CJ) W
I
I ::I:
I I10::
I
I a.
-
.r::
en::
D-
o
o
-'
(f)
(J)
0
I~j~/U~
'J
Z
I'
1- --~
-1- __
I'
1
3:
--
_
---'--'j
::J
1
~
~
z
z
o
()
o
...
W
0::.
~
a:::
>(!)
::>
C>
-----~
:c
t-
___
o::
o
:z
0::
o
CJ)
z
w
en
-l
«
(..),
+
'I-
a..
0:: ,
w
>
>
'\:-
:I:
r-
!r:
o
2
a.
c
-107-
.__
I
-_-1
~geLASSIFIEJ)
of the stable base gyrocompassing
that the vertical
system.
The figure assumes
component of earth rate coupled into the north
gyro due to rotations
about east is negligible.
Since rotations
about east will always be less than ten seconds of arc" KNN can
.
,
be adjusted so that the 0.03 meru of earth rate coupled into the
north gyro at medium latitudes
will not produce appreciable
rotation about the north gyro input axis" A .
.
Stability requirements
on the north loop indicate that KNN
must be less than one-quarter
half plane.
x
T
for the poles to be in the left
v
North gyro recompensation
change in the output of the north vertical
signal to zero py recompensating
instruments
and instrumentation
involves detecting a
sensor
and forcing this
the north gyro.
techniques"
kept below one-half second of arc.
With available
* Ax can
At middle latitudes"
about the north gyro input axis" Ax , produce a nearly
angle change 6f the stabilized
easily be
member.
rotations
equal
azimuth
.
Since A
one-half second of arc" the azimuth variations
x can be kept below
which are a result
of north gyro drift are negligible.
5. 2. 0 East Azimuth Loop
Figure 5-2 is a simplified
diagram of the east azimuth
~~ A sample data technique and a lo\v sensitivity integrator could
be used. The low sensitivity of the integrator does not affect the
stability of the system.
N
<t
::l
~
0)
I
r
(\.---..
r---I
.
Iz
I}-
1
r-----
I
I
I
I
I
IS
N
:~=1
I~
<!
A
L
_
I
I
I
___ J
\...
>.
(!)
en0
1
1(-
W
I
1(1)
I
1<1:
IW
I
I
I
I
L
IL-
~
,....,
0
I- lLJ
1(1) U)
J
N
-
I
I
I
I~O::
I
(I)
I
Ij::
1<1:
I::Jo
1- >
I
I (f)W
I
10
N
I
1«>
I- 0:
I
'M r-i
cd
-10..
-0 a"""'"
I
Q)
'M
I
----+
JI
s:: +II
-M
r-l
ro-o->
o..H
0..0:>
I
___ J
s::
rnb.O
0)
C
'M
I
0
"0
M
0)
0..
0
r-!
X
L!':l
Q)
:>
.........
Q)
tv)
"0
-or-!
+
Ul
0
Q)"O
\I
~c
C'M
b.Q
'M Q)
:J
-
a
rn
.-I
0..00
0
ror-la
r-l ' ro
ro H
C 0)
0
~
l"\J
0..
~Q)
,N
'M
I-
00..
~o 0
-0->,.83
C
Q)
3-
0)
Ul 3
o
1
I
I
I
I
N
0)
.!::
'.-4
S
0)
l"\J
-
o
H 0
:>'a
b.Oo
~ H
Ul:>'
rob.O
S0S
N-o
I
3.........
::l
•
0"00
H Ul
o cd
~o..
.!::b.O
~ o..::l
;j 0 H
.
M
3
0)
o a
H 0
:>,H
b.O:>'
.-l
t':l
C
Q)
b.O
8S
~o
- - --1
I
1
Iz
I
I
I~
I:J
Imo
H
0)
Q) 00
'~ Ul
~ ro
0"0..
I
12
I :r:
--..,
S
cd
.
s::
-0->
'M
,ror-i
r.l1f:r1
:
Q)
~<e:
rn~
-2-
II
II
p:;
N
b.OH
'M 0
..'!.
3
~
1
r~
___
II
C\J
N
:>.
>:>,
:>:>,
N
I
LO
..
W
0::
::::>
<!>
l1..
00
00
ro
0..
So
()
o
(f)
'H
:>,
en
(t
a.
o
o
0
>-
(-
(!)
(f)'I
q
~
...... ::>
u "'"'
........ c::::.
Z
g:
<!
w
.-l
X
L1.)
00
~
C
o
<.>
M
o
o
U
0::
lLJ
o
>
I-
U)
«
"01
w
~01
,.-
N
<i
o Ien
o
~
s::
~ro
0
-1
<t
w
l"\J
I
~
0
--1 ~
£:)
II
CJ
o..
.-
0
-109-
II
II
II
II
l-
t-
t-
t-
loops of the gyrocompassing
system.
Gyro drift can be detected
by observing the output of the east vertical
switches 8
1
and 82 open.
The accuracy
ation depends upon getting a clearly
presence
of acceleration
technique
permitting
error
A
m
, with
of the gyro drift evalu-
.
defined. angle indication in the
induced angle errors.
the system
indication is obtained,
sensor,
The sample
drift while a relatively
clear
depends directly upon the other drifts and
effects occurring
during the sample period.
Chapter IV indicate that the frequency
pared to what will turn out to bea
The data of
of gyro drift is low com-
sample period.
Both east and azimuth gyro drift are evaluated by observing
the output of the east vertical
'open.
sensor,
The angular velocity summation
Am' with switches Sl and 82
in the east gyro is always
.
;'
satisfied
by inputs other than those derived from the east vertical
sensor;
therefore,
of the east vertical
ever,
8
1
when the switches are open, the ideal output
sensor is only due to azimuth gyro drift .. How-
when the east gyro wheel speed is cut in half and the switches
and 82 are open, the output of the east vertical
proportional
to east as well as azimuth gyro drift.
.
sensor
is
The optimiza-
I
.
tion of gyro drift compensation
involves choosing a system time
constant and sampling interval
so that in spite of limitations
.angular measurements
the uncertainty
in gyro compensation
minimum effect on the azimuth angle of the gyrocompassing
in
has a
system.
By writing a general
vertical
.
sensor
(Figure 5-2)
I
be developed.
I
A
m
I
expression
for the output of the east
after switches 81 and 82 are opened
the relative
importance
For this analysis"
of the parameters
it is assumed
will
that the gyro-
compassing, system has reached the steady state when the
switches are opened.
In addition
it is assumed that gyro drift
l
...~
does not change while the switches
are open.
'I
When switches
S1 and S2 are opened" the east and azimuth gyro torque generators are shorted out so. a step change in angular velocity equal
to V is applied to the azimuth gyro and -V
z
Equation 5-2 describes
y
to the east gyro.
the output qf the east vertical
sensor
after
switches Sl and 82 are opened and the signals applied to the east
V
and azimuth gyro torque generators respectively are - {, and
V
z
+P'
A
(P) =
m
a. (P)
1
(TVP + 1)
+
P2(T
v
-2
V
2 2 V w( . )h
y + (1. 5 x 10 -)
Z
1e
P + 1)
p3(T P + 1)
1. 5 x 10
v
(5 -2)
~:c
Chapter IV indicates that the highest frequency of important gyro
drift is in azimuth which has a period of approximately ten hours.
Since the loops will be open for less than one-half hour this is a
D~C'
good assumption.
J
tJtsSIPl£~
Am{P)
=
ai{P)
-r:::--TP~
T T
\IV I-
-2 2
+
(1.5 'x 10
)
3
w(')h
le
J.)
T
(u)w [-2---Z P (T
P
v
+
1)
(5 -3)
Transforming
Equation 5-3 to the time domain and expressing
time constant in terms
of the gyrocompass
2
+..!..
9
time constant"
T
=
3
the
TV"
- 3t
(I - e T)}
(5 -4)
Substituting
K{t)T for t" Equation 5-5 is obtained.
A
m
=
(t)
K(t) _ 1) + K(t)
[K(t) + .!.(e-3
3
6
Contribution
2
_ K(t) + ~ (1 _ e -3 K(t»]
-927
from V
y
(east gyro torque genera-
gyro torque generator)
tor) when 8
is opened.
2
is opened.
Contribution
from V
z
(azimuth
when 8
1
(5 -5)
Equation 5':'5 indicates
east vertical
sensor
torque generator
generator
that the signal appearing
is composed of the component at the east gyro.
at t
=
0 and a component at the azimuth gyro torque
at t = O. Assuming the average
.
plotted in Figure
at the output of the
a.(t)
1
=
OJ Equation
5 -5 is
5- 3.
Three points should be noted from Equation 5-5 and Figure
(1) after the gyrocompass
cal sensor
is ideally proportional
(2) the amplitude
square
ordinate
loops are opened
J
the output of the east verti-
to uncompensated
of the output of the east vertical
of the time 'constant of the gyrocompassing
which varies
gyro drift
J
narrower
linearly
azimuth gyro drift;
sensor
system
(for a given uncompensated
bandwidth system produces alarger
paCLASSIFIEQ
5-3:
varies
as the
for the time
azimuth
output from
(-
--' 0
<! cr:
z >- ~0::
(.!)
(.!)
W
z
C/)
:r:
Z
::> 0
0..
~
f- q
::> Cf)
0
cr:
z.
W
CL
",
"
"-
-
<!
to
I-
<t
,
LO
'\.
en
"
'\.
0:::
-I
<t
zoO::
~e.::
w
(f)>- Z
w
lJ.. (.!) (!)
IJJ
~
0... .07:
0 0
0 <.)
--' Z
I-
o
~~
0::
'\.
r<>
'\.
'\.
'\.
. '\.
"
w
0::
0
I-
0::«
'\.
N
"""-
C1
WI-
0 l.L.
"- '\.
,
'\.
to
l,Q
LO
LO
JQ
x
10
x
LO
!O
nJaW
'JJ\/
r<>
0
0
.<1>
I
LO
C/)
w
-lI-
,
::>
=>w
CJ)
0
~
'\. '\.
~
«
()
"0
c
L'
I- <l
C/)
1<:(
Z
uJ
0-
:E
C/)
w :.?E
W
N
W
.-
N
~
W
(.!)
'\.
>--' (!)
<!
()
:c
>
::>
0:::
""- ,
0:::
::J
I-
lL.
0
=>
0 2
00 0
Z ()
W 0
(f)
rD.::
0::
0
lO spuo'JaS
-114-
z,LzM ( n.)
w'V
",\
0
-.
e.::
=>
(!)
lL.
the east vertical
relative
sensor
in an equal time' interval};
DECLASSIFIEIl
shape of the contribution
to the output of the east vertical
(3) the
of the east anaazimuth
sensor
time constant of the gyrocompassing
is independent
system
loops
of the
(for reasons
which
will become clear later" ~ = 3.3 will be chosen to ~valuate the
T
output of the east vertical
5.2.1
sensor).
Azimuth Gyro Drift Compensation
From Section 5. 2. 0" it is noted that after the gyrocom-
pass loops are opened" the output of the east vertical
proportional
Figure
to the uncompensated
sensor
is
azimuth gyro drift" (u)w.
From
z
5-3" the output of the east vertical
sensor
at t= 3. 3
T
is
equal to
A
m
=
(u) W
z
T
2 (3. 5 x 10- 6
+ 7. a
x
10-6)
(5 -6)
The uncertainty
in azimuth gyro drift detection is found from
Equation 5-6 to be
A
(u)Wz (measurement
,
uncertainty)
m ( ..
-2- mlnrmum
T
x
detectable)
(5 -7)
DBCLASSIFIE~
=
For...!.T
uncertainty
3.3,
Equation 5-7 defines the relation
between the
in azimuth gyro drift in meru" minimum
angle in seconds of arc,
As a realistic
is assumed.
and the time constant of the gyrocompass.
example,
a vertical
For a critically
gyrocompassing
detectable
sensor with a 110 second lag
damped system,
this requires
system time constant of 330 seconds.
the value into Equation 5-7 and'remembering
Substituting
that the gyrocompass
loops are open for 3. 3...!."the following relations
T
Time to evaluate azimuth gyro drift:
East Vertical Sensor Output
Azimuth Gyro Drift
Change in Azimuth Angle
Azimuth Gyro Drift
With the system operating
are apparent.
16.6 minutes
1
second of arc
meru
15
seconds of arc
meru
in a benign environment"
0.01 seconds
of arc is easily detected at the output of the east vertical
defines the vertical
ferred
sensorrs
to a perturbed
by lateral
accelerations
capability.
environment"
a
sensor.
This
When the system is trans-
it is assumed
that noise introduced
will change this angle to close to O. 1 seconds
,~
of arc,
averaged
over the total time the gyrocompass
loops were opened.
>:c
Appendix II presents the results of a spectrum analysis of gyrocompass error angles' which indicate that detecting O. 1 seconds of arc
output from tl;1evertical sensor is in agreement with less than a five
second of arc mean square azimuth angle error.
DECLASSIFIED
"'l"
This would produce an uncertainty
-gyro compensation
the gyrocompass
of O.1- meru in the azimuth
and a 1. 5' seconds of arc azimuth
error
while
loops were opened.
Sample data techniques
and a low gain integrator
to bypass KAE and recompens,ate
its open loop drift rate.
can be used
the azimuth gyro on the basis, of
There are many variations
on the method
used to detect drift in the azimuth gyro and update its compensation.
The three most important
a recompensation
procedure
are simplicity
racy" and speed of convergence.
extremely
interesting
this paper.
things to consider
of implementation"
Although these subjects
and tempting"
This chapter
when determining
illustrates
accu-
are
they are beyond the scope of
a method which could be used
to detect gyro drift and leaves the resultant
recompensation
of the
gyros as a subj ect for future discussions.
B~fore we proceed to the detection of east gyro drift" the ef~ect
of O.1 meru azimuth gyro uncertainty
in the closed loop, gyrocompass
on steady state azimuth angle
must be considered.
K
EE
between azimuth gyro drift and azimuth angle is -K
AE
From Figure
5-2" this is equal to 4.5 x_ 10-2
time constant of 330 seconds"
T
(u)w.z
O.1 meru uncompensated
The coupling
(u)w
z.
w(ie)h
For a system
azimuth
gyro drift would produce a steady state 1. 5 seconds of arc azimuth
angle error.
~CLAs.SIFrED
DECLASSIFIED
5. 2~,2 East Gyro Drift C~mpensation
In the steady state closed loop gyrocompass"
angular velocity summation
satisfied.
performed
by the east gyro is always
East gyro drift is counteracted
azimuth orientation
of the stabilized
the
via a change in the
member
coupling a new hori-
zontal component of earth rate to the east gyro input axis.
speed modulation reduces
the sensitivity
new component of earth rate.
Wheel
of the east gyro to this
If the gyrocompass
loops are opened
and the east gyro wheel speed cut in half" the east gyro drift rate
is equal to the change in earth rate applied to the east gyro input
axis.
Under the aforementioned
of the east vertical
of the east gyro.
sensor
conditio,ns" observing
yields
data on the change in performance
U~dating the east gyrd compensation
of these data and closing the gyrocompass
stabilized
member
Sections 3.3.0"
optimization
to its original
4.3.1"
loops should return
the
have developed a laboratory
of the wheel speed modulation
method which was used to determine
These sections
on the basis
azimuth orientation.
and 4.3.2
speed n1.odulation on a system
the output
technique
the effectiveness
operating
as well as a
of wheel
in a benign environment.
show that when the azimuth angle does not change
and the east gyro wheel speed is cut in half" the east gyro drift
rate is equal to the change in the residual
{u)WE(half wheel speed)
term inside the east gyro.
=
D~CLAsSIF1EI>.
{5-8}
DECLASSIFIED
In this section we shall see how well'.6. R can be determined
H
in an environment
where 0.1 seconds of arc is the minimum
detectable
The following sequence illustrates
angle.
the proce-
dure for evaluating the east gyro drift rate by opening switches
Sl and S2 (Figure 5-2) and cutting the east gyro wheel speed in
half.
Step #1
Disconnect
the east vertical
(open switch Sl ~ Figure
sensor
azimuth
gyro coupling
5-2).
Step 112
Increase
,the east vertical
sensor
east gyro coupling" KEE"
*
and reduce the east gyro wheel speed to half its normal value.
(Less than three minutes
are necessary
for this transient
to
settle. )
Step #3
Open the east vertical
and record
sensor
east gyro coupling" S2 (Figure
the output of the east vertical
mum three minutes' required
sensor.
During the maxi-
to reduce the east gyro wheel speed" the
azimuth gyro has been the azimuth reference.
-gyro has changed the horizontal
the east gyro.
5 -2)"
Drift of the azimuth
component of earth rate applied to
The loops will be opened for over fifteen minutes
:>:C
Reducing the east gyro wheel speed couples an inertia reaction
torque to the gyro output axis.
To minimize the effects of this
transient" the east vertical sensor east gyro coupling is increased
.l:1lI~!ASSIFl.ED
m!~~
.
during which time the azimut~wgfh¥:lfduces
an output of
the east vertical
sensor
as indicated in Section 5.2.1.
the gyrocompass
loops are opened for over fifteen minutes
the three minutes necessary
be neglected,
Under the aforementioned
considerably
conditions,
Equation 5-9 describes
sensor
and the east gyro is operating
at ~alf wheel speed.
(P)=
m ~
(T
a.(P)
~ + 1)
v
and intro-
error.
the output of the east vertical
A
time,
to change east gyro wheel speed can
simplifying the calculations
ducing less than a ten percent
Because
after 81 and 82 are opened
-2 2
+ (1.5 x 10
)
w(ie)h (u)wz
(5 -9)
This equation is exactly the same as Equation 5-3 which was used
to evaluate the azimuth gyro drift except for a term porportional
the east gyro drift,
(u)wy. ,The term proportional
here because the east gyro is operating
speed.
We want to determine
.
to
to (u)Wyis included
at half its normal wheel
(u)w from the output of the east verti-
y
1)!;CLASSIF1Bl)
ca1 sensor
described
DECLASSIFIED
by Equation 5-9.
Assuming that the aver,age interferring
equal to zero,
acceleration
the part of Equation 5-9 proportional
gyro drift has been previously
plotted in Figure
term' of Equation 5- 9 \vhich is proportional
reduced wheel speed is plotted in Figure
It should be noted (Figures
of the gyrocompassing
term is
to the azimuth
5-3.
The last
to east gyro drift at the .
5-4.
5-3 and 5-4) that the time constant
system
is the only system parameter
used to
evaluate the east and azimuth gyro open loop drifts.
In order to show how these figures
of Section 5. 2. 1 is continued.
In this example,
was detected and recompensated
gyrocompass
should be used,
azimu,th gyro drift
for by opening the 330 second
loops and observing
the. output of the east vertical
It was noted that if O. 1 seconds of arc is the minimum
angle,
there would be an uncertainty
vertical
sensor
detectable
the azimuth gyro drift
of O. 1 seconds of arc output of the east
in 16.5 minutes
azimuth gyro is immediately
sity of recompensating
sensor.
of less than + 0.1 meru of 'azimuth
gyro compensation .. Under these conditions,
would produce a maximum
the example
of time.
If the recompensation
followed by a test to determine
the east gyro,
it is assumed
.that
of the
the neces-
azimuth gyro
oJ,
drift does not vary appreciably
during this time intervaL .....Therefore,
~:c
This is a good assumption.because
the highest period of measurable
azimuth gyro drift was over ten hours (Chapter IV).
-121-
-r--
I::J
D-
I:)
0
0::
0
en
-w
l.!J
Q..
(1)
....J
-LO
I.u
Z
W
liJ
..!-
(j)
-<.0
0
"'0
;:
c:
....J
-1 <t
<! ~
0
-~
f- a
cc. 2
,
lJ.J -IN
...-
-f'i')
>
,r(f)
!-
L..
<r
~
D_
o
0
<..9
......
1-
w
Cl
-C\J
cc
0 >...J
~
W
CL
0
0
(/)
<:!
w
0
C\JI
'0
C\J
I
10
><
J.{)
C\J
n..lC)W
'JJ'tj
10 spuo:>C)S
-.122-
LO
..
w
Q)
a::
(f)
=>
-Il-
~
,
~
(/)
(!)
lJ..
0.1 seconds of arc is trie maXlmum output of the east vertical
sensor
due to azimuth gyro drift durJ!~a~sfm~nterval
required
to evaluate the east gyro.
From Figure
5-4" it is noted that the output of the east vertical
sensor produced by the east gyro drift during 3. 3.!. is equal to
T
Am (east gyro drift)
~
y
15 seconds of arc
meru
=
(5 -8)
During this test the total output of the east vertical
to be produc'ed by the east gyro drift.
seconds of arc angle measurment
sensor"
the rms uncertainty
assuming
sensor
is assumed
is an uncertainty
and an uncertainty
of arc output from the east vertical
Therefore"
There
sensor
of O. 1
of O.1 seconds
due to azimuth gyro drift.
in the output of the east vertical
it is all a result
of the east gyro drift" is equal
to
Am (uncertainty when evaluating
the east gyro drift)
O. 14 seconds of arc
(5 -9)
Combining Equations
gyro drift measurement
5-8 and 5-9'~~cLRSsiFIttiy
in the east
is obtained .
.
(u)wy (uncertainty
0.01 meru
=
in measurement)
(5 -1 0)
.At 45 degrees
error
latitude,
this corresponds
to a steady state azimuth
of 2.9 seconds of arc.
Step #4
After the gyrocompass
time,
loops have been opened for 16. 5 minutes
the east gyro is compensated
the east vertical
pensation
sensor
is indicated
on the basis
(Equation 5-8) .
of
of the angle output of
(The uncertainty
in this com-
by Equation 5-10.)
Step #5
A tight east leveling loop is closed while the east gyro wheel speed
is returned
to its normal
value.
Step 116
After waiting approximately
settle,
the gyrocompa$s
for all transients
to
loops are closed.
During this entire procedure
reference.
four minutes
The compensation
the azimuth
procedure
gyro has been the azimuth
relies
firmly
on an open loop
DECLASSIFIED
azimuth gyro drift rate of less than O.1 'meru.
number
Using this
it is noted that a total azimuth angle of less than 2.2
J
seconds of arc developed during the 23.5 minutes
the gyro-
compass loops were opened for east gyro recompensation.
5. 3. 0 Compensation
Sequence
Before a compensation
data must b~ available
and the accuracy
gyro has,
on the spectrum
of the recompensation
tive data on spectrum
been presented
sequence can be developed,
of instrument
process.
Representa-
of azimuth and east gyro uncertainties
in Chapter IV.
essentially,
a maximum
steady state uncertainty
Since 0.01 meru corresponds
of arc azimuth error
at the medium latitudes,
accuracy
system.
uncertainty
of O.2 meru periodic
ten hours.
For the 330 second system,
uncertainty
corresponds
to three
But, the east gyro recompensation
The accuracy
because
the east gyro could
effect on the
The azimuth gyro has an
with a period
of approximately
0.2 meru azimuth gyro
seconds of arc azimuth error.
procedure
requires
an azimuth
of less than O. 1 meru.
of the recompensation
process
is difficult to define
of the large number of variabJffi involved.
recompensation
of
to three seconds
every twelve hours with very little
of the gyrocompassing
gyro uncertainty
has
These data indicate that the east
0.01 meru per day.
be recompensated
uncertainty
accuracies
From the expected
of Section 5 ~2.1 and Section 5. 2. 2, the
rms azimutn. error
due to east and azimuth gyro uncertainty
is
t>ECLASSlFIED
K
(u)A
z
;;
(u)w
(__EE
K.AE
z)
2
(u)w
+(
W (ie)h
y)
2
W (ie)h
;;
3. 2 seconds of arc
(5-11)
Gyro drift is the maj or source
base gyrocompassing
. system.
of azimuth
it is representative
with azimuth gyro uncertainties
ties of O.01 mer-u.
assumptions
of the expected rms azimuth
of the performance
which would result
of 0.1 meru and east gyro uncertain-
If properly
should keep the uncertainty
in the stable
Although many simplifying
have been employed in the derivation
uncertainty"
error
executed" the compensation
procedure
in gyro drift below the aforementioned
value over the maximum period of time.
It is important
system
that it may be transferred
operating with sufficient
from the gyrocompass
accuracy
to the gyro stabilized
the maximum time interval.
mode of operation
It was noted in the previous
that large azimuth angle errors
did not result
Therefore"
gyro recompensation
over
sections
when the gyrocompass
loops were opened and the output of the east vertical
to detect changes in the performance
to have the
sensor
monitored
of the azimuth and east gyros.
can be a continual process
because
"
it does not affect the operational
readine,ss
of the system.
Armed with the data of Chapter :t\Egh~~~~pensation
procedures
previously
sequence is suggested.
developed" the following compensation
Each time the gyrocompass
opened" the sample data system, averages
vertical
sensor
the output of the east
and" at the end of the indicated
applies a compensation
time interval"
to the azimuth or east gyro.
data technique applies azimuth gyro compensation
steps"
loops are
east gyro compensation
in O.1 meru
in 0.0066 meru steps.
'PECLASSJJ;'.LBD
The sample
" "'l.1t~S~.
COMPENS ...
J\ TI~~QUENCE
Test
Number
Time
1
00: 00: 00
Event
Open east-azimuth
evaluate (u)w .
gyrocompass
loops
z
00:16:30
Record A
m
and compensate
azimuth
gyro (0. 1 seconds of arc = O. 1 meru).
Close gyrocompass loops.
2 to 11
01:00:00
Reneat of Test #1 at one hour intervals.
02:00:00
If the azimuth gyro drift in Test #11 is
J.
< 0.1 meru
go on to Test #12.
l
If the
azim1;1thgyro drift is > O. 1 meru
l
repeat
Test #11 until azimuth gyro drift is < O. 1
meru.
12
11:'00:00
'Open east azimuth loop. Tighten east
vertical sensor east gyro loop. Reduce
east gyro wheel speed to one-half normal
value.
11:03:00
Open east vertical
11:19:30
Record A
m
and compensate
=
secQnds of arc
13
sensor
east gyro loop.
east gyro (0.1
0.0066 meru).
11:20:00
Close tight 'east vertical sensor east gyro
loop. Change east gyro wheel speed to
normal.
11:24:00
Close normal
12:00:00
Repeat Test #1
gyrocompass
1
etc.
. DE CLASSlTIEDf
-128-
loops
£Ct.AS~
VI
CON~USIONS
One year ago a preliminary
analysis
of the arduous problems
involved in stable base gyrocompassing
indicated that present
could not perform
uncertainty
instruments,
the job.
systems,
First,
of all instruments
with a three-gyro
system.
effects of short-term
operating
in the system
instrument
uncertainties
instruments
changes in instrument
attempting high accuracy
The second deterrent
angles which must be consistently
compassing
system to recompensate
siderable
seconds of arc.
..I..
......
was the minute
problem
Shori.'-term: all time up to approximately
the gyrocompassing system.
the gyro-
long-term
references,
nonlinearities.l
angular measurements
The third formidable
the
to
detected,in
the primary
and angle transducer
doubt existed regarding
angles
it is to steady state
stable base gyrocompassing
Because of friction
to re'duce the
But, the narrower
incremental
gyros.
in the
is to change the
the more susceptible
performance.
environment
and gyrocompassing
the bandwidth of the system.
bandwidth of the system,
~~
dynamic errors
The only method available
coupling between the various
by decreasing
and instrumentation,
the combined short-term
must be small enough to 'produce acceptable
gyrocompassing
system
con-
below O. 1
was recompensation
five time constants
of
of the east gyro.
Regardless
of the gyR~~~~Wtnethod
I
employ'ed (east-west
averaging,J gyro wheel reversal,
speed m9dulation,J etc.),
dyne-centimeters,7
of the east gyro.
0.01 meru,J approximately
is 'of paramount
Because
importance
tests performed'
on a single component,J this paper was interested
environment.
be consistently
nonlinearities
in the repeat-
technique in a system
Although gyros are temperature
\vheel hysteresis
0.0015
in the evaluation
of recent preceeding
ability of the wheel speed modulation
wheel
sensitive
and gyro
exist,J the gyro wheel speed must
changed from 12,7000 to 6, 000 rpm,7 introducing
less than 0.0015 dyne-centimeters
of uncertainty
in the torque
sum+nation.
Laboratory
testing of a prototype
gyrocompassingsystem
,
produced
data on, system performance
which removes
problems.
many of the previous
These tests produced
system parameters,J
test program,J
system
ficiallimits
and systems.
seemingly
evaluations
on the performance
of state-of-the-art
Many of the answers
of prototype
Four conclusions
uncertainties,7
A flexible
of proposed
can remove the previously
to future system
obtained only from a combined analytical
analysis
insurmountable
system performance.
coupled with realistic
characteristics,J
in a benign environment
data on instrument
and over-all
has
.
assumed
initial
arti-
instruments
designs
can be
design and laboratory
models ..
can be derived from the experimental
data and
;,
analytical
1.'
concepts pres ented in this paper. f)!:CLASSIFIED
Superio'r gyro performance
gyrocompass
(Chapter IV) in the 2-16
is the primary
gyrocompassing
is currently
for the improved performance
single-degree-of-freedom
superior
to any previous
power supplies,
Two reasons
(1) the 2FBG-6F
gyro design is
gyro design in its class;
the proper
temperature
circuitry
(2)
con-
to derive
from its instruments.
to be ap. east gyro torque uncertainty
in the 2-16 gyrocompass
was a ramp with a slope of less
than 0.0013 dyne-centimeters
gyro torque
are,
and supporting
the optimun:- ,performance
What appeared
realizable.
integrating
the 2-16 system provides
trol,
reason that stable base
per day.
The azimuth
u,ncertainty was approximately
a pe:riod of ten hours
and an amplitude
period~c with
of O.026 dyne-
centimeters.
2.
Two'-hundr,edand
sixty-eight
hours of data indicate wheel
speed modulation to be a usable technique in the 2-16 gyrocompass.
This initial test on the feasiblity
modulation
(Chapter IV) produced
tests
encouraging
results;
future
over a longer time duration employing refined procedures
are necessary
before any firm committments
the operational
3.
of wheel speed
The transfe~ring
capability
can be made on
of the technique.
of the stable base gyrocompassing
DEClJ!.SSlF1E:o
system
,
.DECLASSIF1ED
from the benign environment to a more realistic
rounding is a major change.
analysis
environment.
Absolute instrument
accomplished
that the system has
capability to permit its being adapted to
a more realistic
4.
However ~ a preliminary
(Chapter V) indicates
considerable
sur-
alignment and calibration
with available instrumentation
so that reasonable
latitude relocations
absolute accuracy
of the gyrocompassing
Data recorded
techniques
do not affect the
sys,tem.
in the benign environment
that the gyrocompassing'system
can be
indicate
is capable of being
adapted to an op.erational environment with acceptable
degradation in performance.
tested in the laboratory
extending the. accuracy
The preliminary
concepts
also indicate the possibility
of the self-azimuthing
system over an indefinite period of tim,e.
system is actually tested in a realistic
is dangerous to extrapolate
of
guidance
Until the
environment~ it
these data~ yet~ unrealistic
to ignore the data and possibilites
it implies.
DECLASSIFIEQ'
NOMENCLATURE
x g,
0
'.0
••
y goo:
z ()
0
0
0
0
0
0
0
•
0
0
0
•
0
0
0
0
•
0
0
0
0
0
•
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
•
0
•
0
0
0
0
0
•
0
0
0
•
Geographic
Geographic
Direction
North
East
of Gravity
b
~x
.
0
0
0
0
0
(u}Wx .
W ..
y
0
(u)W
y
W
z
o.
0
0
0
x
0
Ay .
A
z
.
(u)A
•
0
0
•
0
•
0
•••
0
0
0
0
••••
0
0
•
0
0
0
•
0
0
0
•
0
0
0
••
0
0
•
0
0
.
0
0
0
••
••
0
0
•
Angular
0
•
•
0
'0
0
•
0
•
0
0
0
••••••
0
0
0
0
0
0
0
0
•
0
0
0
0
••
0
0
y
•
0000000.00.00
0
0
0
(u) Woox
A
0
0
0
••
0
0
o.
0
0
0
•
0
0
0
0
0
0
0
•
0
•
0
••••••
0
•
0
•
0
0
00
0
0
0
••
0
0
•
0
0
0
0
•
0
0
•
0
0
••
0
0
0
0
0
0
.0
0
0
•
0
0
into North Gyro
North Gyro Drift .
Angular
•
••••
0
0
0
0
Velocity
Velocity
into East
Gyro
East Gyro Drift
Angular
Velocity
Azimuth
'
Gyro Drift
Rotation
About x Gyro Input Axis
Rotation
About y Gyro Input Axis
Rotation
About z Gyro Input Axis
Uncertainty
-133-
into Azimuth
in East Angle
Gyro
DECLASSIFIED
NOMENCLATURE
W(ie)h
Horizontal
W(ie)v ','
Vertical
g
Magnitude of Gravity.
S
xv
'
K
EE
'!(AE . '"
,
T
Component of Earth Rate
Sensitivity
of North Vertical
volls/g
Sensitivity
of East Vertical
volis/g
,
S
yv
•••••••••••••••••••••
v'
,
Component of Earth Rate
Sensor
Sensor
East Vertical Sensor - East Gyro
Coupling" meru/arc
second
East Vertical Sensor - Azimuth Gyro
Coupling" meru/arc
second
Verticai
Sensor Time Constant
T2
Characteristic
Gyrocompass
Time of Second Order
T3
Characteristic
Gyrocompass
Time of Third Order
A(h _y)
Angle Between the Horizontal
East Gyro Input Axis
bE CLAS SIFIErJ.
'J>
Plane and
APPENDIX'I
DECLASSIFIED
NOMENCLATURE
A'
A
(Y g,-Y)
Angle Between the Horizontal
East Gyro Input Axis
(-Y
Angle Between Geographic
East Gyro Input Axis
g
-y)
East Gyro Torquing
Command
STG
Torque Generator Sensitivity
meruf ampere'
'.'
A(y -m)
g
(Compensation)
Full Speed Angular Momenta of Gyro
Wheel
,
R
and
West and
ic'
H
Plane
'
All non -acceleration
in the East Gyro
.;
Dependent Torques
Angle Between Geographic
Mirror Normal
East and
A (-y -m)
g
Angle Between Geographic
Mirror Normal
West and
A(~_y)
Angle Between Mirror
Gyro Input Axis
(u)A(h~y)
Uncertainty
in Measurement
of A(h_y)
(u)R
Uncertainty
in Measurement
of R
DECLASSIFIED ~
Normal
and East
'
DECLASSIFIED
NOMENCLATURE
(u)A(y _y)
~
:
Uncertainty
in Measurement
g
~R
Change in R
.6. ic
Change in ic
.6. STG
~.. ~
W
m
W
my
Change in Torque
Modulation
Generator
Induced Drift Rate
W(ie) cos Lat
Horizontal.Component
'W(ie) sin Lat
Vertical
Component
. Input Axis Angular
Float With Respect
Wi -f (IA )
Output Axis Inertia
Resp~ct to Cas e
C d(OA)
Sensitivity
East Gyro Drift Rate of Normal
Speed.
•••••••••••••••••••
Ac-f(OA)
of A(y _y)
,
'
of Earth
of Earth
Wheel
Rate
Rate
Velocity of Gyro
to Inertial Space
of Gyro' Float With
Output Axis Angle of Gyro Float With
Respect to Case
.
Output Axis Damping of Gyro Float
With Respect to Case
APPENDIX'
I
NOl\tIENCLATURE
(u)M(OA) ~
Wi-c(IA)
0
W c -f{IA)
W
T ...
AT
W
•
o
13
0
0
•
0
0
0
0
0
••
.
0
0
0
0
••
0
0
••••
•••
0
•••
•
0
0
0
••
0
0
0
•
0
•
0
0
0
•
0
0
0
••
0
•
0
0
0
0
0
0
•
•
0
0
0
•••
0
•
0
••
0
•••••
0
0
•
0
•••
0
0
0
•
0
0
•
0
0
0
Output Axis Torque
Input Axis Angular
Case With Respect
••
0
•
0
••
0
0
0
0
0
0
••
Table Rate
0
0
••••
0
Velocity of Gyro
to Inertial Space
Input Axis Angular Velocity of Gyro
Float With Respect to Cas e
•
Table Angle
o.
0
Uncertainty
•
••
Sinusoidal
Frequency
of Table Angle
Amplitude
of Table Angle
Input Axis Total Moments
With Respect to Case
Ig(IA) ..
0
'00
0
0
0
0
•
0
•
0
•
0
0
Input _t\xis Inertia
Respect to Case
••
i
Ac-f(IA)
.
0
•
0
••
0
•
'0
0
0
••
0
•
,
C d(IA) ...
0
•••
0
Kc -f(IA) ....
0
,
•••••
•••••
'
0
0
of Gyro Float With
Input Axis Angle of Gyro Float With
Respect to Case
Input Axis Damping of Gyro Float With
Respect to Case
••••
0
of Gyro Float
••
0
Input Axis Spring Constant
'Nith Respect to Case
of Gyro Float
APPENDIX
I
ft
DBCtASSl'F1.Bw:
NOMENCLATURE
Azo
·
Ro
.
·
Initial Azimuth Angle of Gyrocompassing System
..
Initial East Gyro Residual
D. A
Change in Azimuth Angle of Gyrocompassing System
z
Am
Ou tpu t
..
vz
y
a.(P) ........•..........
of Eas t Vertical
Sens or
Z Gyro Angular Velocity Command
Proportional
to Uncompensated Azimuth
Gyro Drift
v
1
Term
)
Y Gyro Angular Velocity Com+nand Praportional to Uncompensated Azimuth
Gyro Drift
Interferring
Acceleration
PECLASSlfIELl
APPENDIX'II
DECLASSIFIED
SPECTRA
OF GYROCOMPASS
When the s~able base gyrocompass
benign laboratory
to an operational
angle uncertainties
arise.
is transferred
environment"
produced primarily
In the course of this paper)
the rel~tive
pass error
orders
error
of this analysis
indicate that
in this paper are realizable.
of stable base acceleration
frequencies
orders
frequencies .. Reference
(6) provides
=
a source
which
over all
of experimental
data
of wind velocity which may be written
spectra
for our case.
'Y (32 S2
7T( _S2
was assumed
system)
of uniform unit transmissibility
on the power density spectra
of acceleration
of gyrocompass
spectra
to be impress,ed on the stable base gyrocompassing
is mounted in a structure
are poorly
in driving functions and l?ase
,In order to derive the relative
n(s)
spectra
stable base gyro-
angles) wind power density acceleration
in terms
accelerations
of magnitude of mean square value gyrocom-
defined because of the vvide variations
dynamics.
of
wind gust acceleration
The results
angles assumed
The spectra
from the
questions
by lateral
were assumed to be acting upon the two-axis
compass of Figure 5-2.
ANGLES
+ 'Y
(II -1)
2)
\bLCLASSIE1Etl
~~;!t~~..
..fkIY
m:~ :..
" ,',.'l..;-:'. (~
2
~
'
.
is th~ amplitude
the average
of the \vind autocor~WisSFpJEDonl
frequency
square
(Figure
values
5 -2) and Parceval's
of the following
output of east vertical
angle.
compass
From
error
is
of wind occurrence.
This function was used in conjunction
function
and'Y
sensor
this analysis
with the syst~m
Theorem
gyrocompass
I
(2) A
y
I
to derive
error
east anglel
the mean square
transfer
the mean
angle (1) A
(3) A
z
I
value of these
m
I
azimuth
gyro-
angles were found to be
T
KAE w(ie)h
K
EE
v
TV
(II -2)
'Y
- KEE
+ 'Y
1
(II -3)
DECLASSIFIELl
DE~SStFIED
EE
2
13 [
.....2
'v
[
[1:. +
[
I{AE w(ie)h
TV [
KEE
(II -4)
These equations all have the same denominator
,feedback in the gyrocompassing
system.
function due to
The mean square value
of azimuth erro~ angle, A.AA
(0)., is only proportional
of the' east azimuth cou~ling squared,
value of the east error
One is proportional
squared,
ang:e,
Ayy~OL
to east vertical
(KEE)2 ,and
second term can be neglected
is composed of two terms.
sensor
"east gyro coupling
for most ratios. of K
AE
s~nsor,
functioI?- of the first
sensor plus a feedback via the east- gyro loop.
negligible
to the coupling
earth rate squared.
output of the east vertical
produced by the transfer
portional
The mean square
the other is proportional
via the azimuth gyro and horizontal
The mean square
(KAE)~
to K
O. 4 radians
second
<
'V
.
EE
AMM(O),
The term proloop is
and has been disregarded.
For typical wind gusts,
This
order lag vertical
to a feedback via the azimuth gyrocompass
in magnitude
to the value
< 3 radians
I
DECLASSIFIEP
second'
is
Therefore,
.L1.
so, submittillit..J-,ke critically
DECLASSJJ:'1L1J.
damped third order, gyrocompass
relations
and assuming that the system is operating
from Equation 2-7
at a medium latitude,
the equations reduce to
1'0 {32 1 3
(-)
3 'Y T
- -
(II -6)
(II -7)
Equations 11-5, 11-6, and 11-7 express
the gyrocompass
error
the third order critically
that the assumption
the mean square value of
angles as a function of the time constant of
damped gyrocompass.
It should be note~
that 'Y » I(EE has reduced Equation 11-4 to
Equation II -7 by neglecting the feedback to the east vertical
via the east loop and is, therefore"
pass loops are opened in Figure
applicable
5-2.
-1
_I-
-.-For 100< T < 500, K
EE
< < 1 s econ d.
sensor
when the gyrocom-
Equations II-5
and 11-7 are
3
for any third order
critically
square value of thes'e error
mE€JIiASSl~y
be used
damped gyrocompass.
The mean
angles can be evaluated from a
knowledge of the amplitude, of the wind autocorrelation
function
3
?
i'"
'and average frequency of wind occurrance
{32
know 2" or 'Y and they can only be determined
3
experimentally.
3
However
3
for the system time constants
100 seconds <
T
< 500 seconds.
nitude ot thes e error
T
3
2"
x
=
orders
T ::
10-2 f3
2
<
'Y
in this paper
3
of mag-
angles turn out to be
100
1 x 10-6 {3
3"
discussed
The relative
We do not
'Y.
3
<
2
1
-3 x
5
"2 x
'Y
500
10-8 J3
2
'Y
<
The import,ant point to be noted from this analysis
is that the
mean square value of azimuth angle and the output of the east
DECLASSIFIED'
, ":'143-
, 'f"'I:£D
iEC'L~~Slr
ve'rtical sensor
appear to be consistent'v/ith
throughout this paper.
those ~alues
Ayy(O) is so small
compared
angles that it is belo\v our region of interest.
this paper a design criteria
five seconds of arc.
assuming
cal sensor
to the other
In the course
has been rms azimuth. variations
A compensation
procedure
that vie could detect an average
of 0.1 seconds of arc.
J.
assumed
of
of
was developed by
output of the east verti-
Since A.M1v.J:(O) is between one
and two orders
of magnitude below A.
that reasonable
relative
AA (OL
this analysis
values have been assumed
DECLASSIFIED
-144-
indicates
for these angles.
UNCLASSIFiED
BIBLIOGRAPfIY
DBCL.1{SSIPIEJ)
1.
Williamson"
R. P."
Technique"
achusetts
(Unclassified
Institute
oratory"
p.~ Gyrocon1.pass Error
TitleL
Report T-315"
of Technology"
Cambridge"
Averaging
(lVIass-
Instrumentation
Massachusetts"
June"
Lab-
1~62).
CONFIDENTIAL
2.
Reed" T. E." '~Theel Speed Modulation"
TitleL
(lV£assachusetts Institute
mentation.Laboratory"
August,
3.
1962).
Cambridge,
Vergoz,
OnA Self-Azimuth
October
Cannon, R. H.,
J. lVI:., Some Test Results
(Massachusetts
nology, Instrumentation
4.
Laboratory,
1962).
5 ..
Schesser,
R. J.,
Alignment
bridge,
6.
Inc.,
(Journal
T-149"
Instrumentation
August,
Feedback
of the Aero-
1961).
l'vIicrostability
Report
Newton, G. C., Gould, L. A.,
Design Of Linear
Mass-
Guidance Systems
November"
Smith" A. J.,
lVlassachusetts,
of Tech-
Cambridge,
Th:?ry,
New York,
of Technology"
Institute
of Inertial
scope Spin Axis Bearings,
Institute
(Unclassified
SECRET
By Gyrocompassing--Linear
'space Sciences,
Instru-
Massachusetts,
ICBM Guidance System,
Report E-1231,
achusetts,
of Technology"
CONFIDENTIAL
l\tIarshall,' R. E.,
Title),
(Unclassified
of Gyro-
(Massachusetts
Laboratory,
Cam-
,1957).
Kaiser,
J. F.,
Controls,(John
Analytical
Wiley & Sons,
1957).
ntCLASSIFIED
UNCLASSIFiED