MATH 345: Assignment 4 Solutions Q1
advertisement

MATH 345: Assignment 4 Solutions
Q1
ẏ = −x3 + x4 − δy
ẋ = y,
(1)
(a) Fixed points
To find all the fixed points we must set ẋ = 0, ẏ = 0 and solve for x, y.
ẋ = 0, ẏ = 0 ⇒ y = 0, −x3 + x4 − δy = 0
y = 0, −x3 (1 − x) = 0
Therefore, there are two fixed points: (x∗ , y ∗ ) = (0, 0), (1, 0)
(b) Linear Stability Analysis
Calculate the Jacobian matrix for this system:
∗
∗
A = Df (x , y ) =
0
1
−3x2 + 4x3 −δ
At (x∗ , y ∗ ) = (0, 0), the linearization becomes:
∗
∗
A = Df (x , y ) =
0 1
0 −δ
i) δ = 0: The eigenvalues are both zero, so (0, 0) is a non-hyperbolic fixed point with a double
zero eigenvalue.
ii) δ > 0: The eigenvalues are 0, −δ, so (0, 0) is a non-hyperbolic fixed point with a single zero
eigenvalue.
At (x∗ , y ∗ ) = (1, 0), the linearization becomes:
∗
∗
A = Df (x , y ) =
0 1
1 −δ
Evaluating the determinant of this matrix gives us Det A = −1. Therefore for both i) δ = 0
and ii) δ > 0, the fixed point (1, 0) is a hyperbolic saddle point.
1
(c) Nullclines, Direction Fields
The x-nullcline is given by ẋ = y = 0.
The y-nullcline is given by ẏ = −x3 + x4 − δy.
i) δ = 0: The x-nullcline is given by y = 0 and the y-nullclines are given by x = 0, x = 1.
ii) δ > 0: The x-nullcline is given by y = 0 and the y-nullclines are given by y = δ −1 (−x3 + x4 ).
(d)
According to Bendixson’s criterion, if we can show that ∇ · f is not idenitically 0 and does not
change sign in R2 , then we can say that there are no closed orbits in R2 .
∇·f =
∂
∂
y+
(−x3 + x4 − δy) = −δ
∂x
∂y
Since δ > 0, we can see that ∇ · f is not identically 0 and will obviously not change sign as it
is a constant.
Therefore, there are no periodic orbits in R2 when δ > 0.
2
(e)
To get this function V (x, y), we use Hamilton’s equations:
∂V
= −ẏ
∂x
∂V
= ẋ,
∂y
i) We set δ = 0 and integrate both equations to get:
1
V (x, y) = y 2 + g(x),
2
Putting them together gives us:
1
1
V (x, y) = x4 − x5 + h(y)
4
5
1
1
1
V (x, y) = y 2 + x4 − x5 + C
2
4
5
We set C = 0 and get V (x, y) as defined above as our non-increasing function when i) δ = 0.
We know that this function is non-increasing because V̇ = dV
= 0. When ii) δ > 0, then we can
dt
see that V (x, y) is decreasing except at certain points.
∂V dx ∂V dy
dV
=
+
= (x3 − x4 )y + y(−x3 + x4 − δy) = −δy 2 ≤ 0
dt
∂x dt
∂y dt
We can see that V is decreasing except when y = 0.
i) We can see that V is constant in time, and non-increasing along all trajectories of the system.
Also, we can see that the non-hyperbolic fixed point (0,0) is a local minimum of V (x, y).
Therefore (0, 0) is a Lyapunov stable fixed point.
ii) δ > 0: We have seen that V is decreasing except when y = 0. Using a similar argument
to that given in homework 3, question 1e), we know that V will be decreasing on any open
interval of time. Therefore, there can be no closed orbits when δ > 0, because we do not
return to the same value of V . Moreover, (0, 0) is a Lyapunov stable fixed point.
(f )
1
1
1
V (x, y) = y 2 + x4 − x5
2
4
5
3
δ = 0: For this case, the trajectories of the system follow the level sets of V (x, y).
δ > 0: The trajectories of the system decrease along the level sets of V (x, y).
4
Q2
ẋ = a − x + x2 y,
ẏ = b − x2 y,
x ≥ 0, y ≥ 0, a, b > 0
(a)
Solve {ẋ = 0, ẏ = 0}:
0 = a − x + x2 y ⇒ x 2 y = x − a
0 = b − x2 y = b − x + a ⇒ x = a + b
b
(x − a)
=
y=
2
x
(a + b)2
b
The unique equilibrium is given by (x∗ , y ∗ ) = (a + b, (a+b)
2 ). Now perform a linear stability
analysis of this fixed point. The Jacobian is:
∗
∗
A = Df (x , y ) =
−1 + 2x∗ y ∗ x∗ 2
−2x∗ y ∗
−x∗ 2
⇒
Tr A = −1 + 2x∗ y ∗ − x∗ 2 , Det A = x∗ 2
Tr A = −1 + 2
b
− (a + b)2 , Det A = (a + b)2 > 0
a+b
Since Det A > 0, we know that we either have a node or a spiral; it may be stable or unstable,
depending on the sign of the Tr A.
b − a − (a + b)3
b
− (a + b)2 =
a+b
a+b
Since a + b > 0, we can classify the stability of this fixed point as follows:
Tr A = −1 + 2
• if b − a < (a + b)3 , then Tr A < 0 and we have a hyperbolic attractor.
• if b − a = (a + b)3 , then Tr A = 0 and we have a non-hyperbolic point with two complex
eigenvalues.
• if b − a > (a + b)3 , then Tr A > 0 and we have a hyperbolic repeller.
(b)
The curve in the ab-plane where we expect Hopf bifurcations to occur is when Tr A = 0. (i.e:
b
gives us
b − a = (a + b)3 ). Writing the Trace out in terms of x∗ , y ∗ = x∗2
2b
− x∗ 2 = 0
∗
x
x∗
⇒ b = (1 + x∗ 2 )
2
x∗
∗
a = x − b = (1 − x∗ 2 )
2
T rA = −1 + 2x∗ y ∗ − x∗ 2 = 0
x∗ = a + b
⇒
⇒
5
−1 +
Thus a and b along the curve corresponding to Tr A = 0 can be expressed in terms of x∗ .
Note that, as x∗ increases from 0 to ∞, b increases from 0 to ∞, while a increase from 0 to some
positive maximum value then decreases to −∞. Using calculus, the maximum value of a occurs
when x∗ = √13 , a = 3√1 3 (and b = 3√2 3 )
Furthermore, a = 0 iff x∗ = 0 or x∗ = 1 (x∗ ≥ 0) and b = 1 when x∗ = 1. Finally, a < b for all
x∗ > 0 but a ≈ b for x∗ near 0, and the curve is tangent to a = b near the origin, but always lies
underneath it (a < b).
We are only interested in a, b > 0, and we know if a < b, the Tr A < 0 (see (a)i))
So if a is fixed at a value less than
and b = bc2 , with 0 < bc1 < bc2 < 1
1
√
,
3 3
then Hopf bifurcations (are expected to) occur at b = bc1
(c)
Nullclines, direction field, trapping region.
If we can show that all trajectories for our system flow into a bounded region in R2 that contains
no equilbrium points, then by the Poincare-Bendixson theorem, our system has a periodic orbit
contained in this region, which we call the trapping region.
Choose the following points A = (a, 0), B = (a, ab2 ), C = (a + b, ab2 ), D = (a + b + ab2 , 0). Let
AB be the line connecting points A and B, and denote other lines by a similar label. Let R be
the quadrilateral figure that is enclosed by these lines connecting ABCD.
We must show that ẋ > 0 along AB, ẏ < 0 along BC, and that ẏ > 0 along AD. In addition
we should show that ẏ ≥ 0 at A and ẏ ≤ 0 at B. For the boundary segment CD this may be a
little bit more challenging.
The proof that CD will draw trajectories in is as follows: Choose a Lyapunov function,
V (x, y) = x + y.
6
V̇ = ẋ + ẏ = a − x + b < 0 iff x > a + b
(2)
Thus if x > a + b, then trajectories cross the level sets of V (x, y) = c in the direction of
decreasing V . If we take c = a + b + ab2 so that this level set, which is a straight line of slope
−1 and passes through points C, D, we can see that trajectories will cross CD into the trapping
region.
You will find that the trajectories at A,B and C move parallel to the boundary, but due to
the fact that the trajectories along all boundaries move into the trapping region, trajectories from
these points will also move into the trapping region.
Showing all these conditions will prove that R is a trapping region.
(d)
If bc1 < b < bc2 , the fixed point in R is a repeller. In this case, modify the trapping region R be
removing a small disc around the fixed point. Then this modified bounded and closed region is
still trapping and contains no fixed point. Hypotheses (1)-(3) of the Poincare-Bendixson theorem
are satisfied, therefore there exists a closed orbit in the modified trapping region.
If 0 < b < bc1 or bc2 < b < ∞, then the above argument does not work, but it does not prove
there is no closed orbit.
(e)
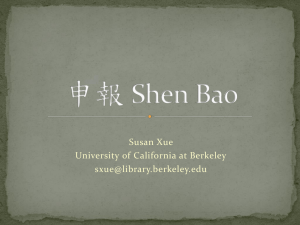
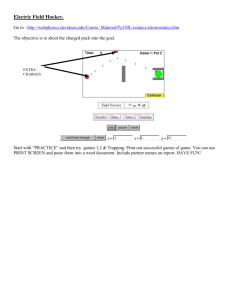
The phase portraits using XPP are found on pages 9 - 13.
When a = 0.1365, then bc1 = 0.1635, bc2 = 0.67916
• b = 1.00000 > bc2 : the phase portrait shows attractor and no closed orbit, consistent with
above.
7
• b = 0.67916 ≈ bc2 : it is unclear from phase portrait whether there are any closed orbits.
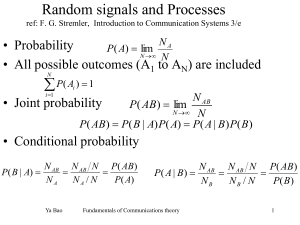
• b = 0.47916: This point is between bc1 and bc2 , phase portrait shows repeller and closed orbit,
consistent with the above analysis.
• b = 0.16350 ≈ bc1 : Again it is unclear from the phase portrait whether there are any closed
orbits.
• b = 0.14350 < bc1 : The phase portrait seems to show attracting fixed point and no closed
orbit. This is consistent with the above analysis for 0 < b < bc1 .
(e)
When you compute the bifurcation diagram in AUTO, the output in the command window should
look something like this:
BR
1
1
1
1
1
1
1
PT
1
27
50
82
100
150
178
TY LAB
PAR(1)
EP
1 1.000000E+00
HB
2 6.791425E-01
3 4.376814E-01
HB
4 1.636200E-01
5 5.944112E-02
6 1.217492E-02
EP
7 -1.659704E-04
L2-NORM
U(1)
1.375151E+00 7.742142E-01
1.306677E+00 1.020853E+00
1.446425E+00 1.327577E+00
1.841078E+00 1.816432E+00
1.560581E+00 1.548231E+00
5.705088E-01 5.507958E-01
1.366261E-01 -8.929397E-03
U(2)
1.136500E+00
8.156380E-01
5.741814E-01
3.002341E-01
1.959411E-01
1.486749E-01
1.363340E-01
From this output we can get the values of b where a Hopf Bifurcation (HB), occurs.
Hopf Bifurcation values
i) Analytic (Tr A = 0)
ii) AUTO (approx)
bc1
bc2
0.6791604
0.1635000
6.791425E-01 1.636200E-01
We can also get the fixed points (x∗ , y ∗ ) at each of these points
(x∗ , y ∗ ) at bc2
x∗
y∗
b
Analytic (a + b, (a+b)
0.8156604
1.020830
2)
AUTO approx.
8.156380E-01 1.020853E+00
∗ ∗
(x , y ) at bc1
x∗
y∗
b
Analytic (a + b, (a+b)
0.3
1.816
2)
AUTO approx.
3.002341E-01 1.816432E+00
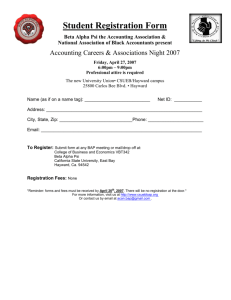
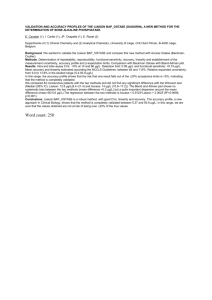
As we can see, the results from AUTO and our analytical results compare quite well. The
bifurcation diagram we computed (page 14) is also consistent with our plots from d) and our analytical results: We have a stable limit cycle for bc1 < b < bc2 . Otherwise we do not have limit
cycles. In particular, we have no limit cycles when b = bc1 or b = bc2 .
(Once again, the plots for the above solutions made by hand, XPP, and AUTO were drawn by
Wayne Nagata)
8
3
y
a = 0.1365, b = 1
2.5
2
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
3
x
3
y
a = 0.1365, b = 0.67916
2.5
2
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
3
x
3
y
a = 0.1365, b = 0.47916
2.5
2
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
3
x
3
y
a = 0.1365, b = 0.1635
2.5
2
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
3
x
3
y
a = 0.1365, b = 0.14350
2.5
2
1.5
1
0.5
0
0
0.5
1
1.5
2
2.5
3
x
Y
3
2.5
2
1.5
1
0.5
0
0
0.2
0.4
0.6
b
0.8
1
Q3
Answer:
dV
= Vx ẋ + Vy ẏ = mxm−1 (−x + 2y 3 − 2y 4 ) + nay n−1 (−x − y + xy)
dt
= −mxm +2mxm−1 y 3 −2mxm−1 y 4 −anxy n−1 −any n +anxy n = −2x2 −4y 4 , if a = 1, m = 2, n = 4.
< 0 for every point in the
Thus, V = x2 + y 4 is a Lyapunov function for the system. Since dV
dt
phase space except at the fixed point (0, 0). It is impossible for the existence of a closed orbit away
from (0, 0), since if it existed, starting from each point of the orbit, V would continue to decrease
until (0, 0) is reached.
−1 0
−1
6y 2 − 8y 3
⇒ J(0, 0) =
.
J(x, y) =
−1 + y −1 + x
−1 −1
Thus, T r = −2, Det = 1 ⇒ λ1,2 = −1. This is a degenerate node but it is asymptotically stable
because both eigenvalues are negative.
Q4
Answer:
∂
∂
1+x
∂
∇ · (g~x˙ ) =
(g ẋ) +
(g ẏ) = y α−1
(r(1 − x)(1 + x) − y) +
∂x
∂y
∂x
x
h
i
2
α
2rx + α
= y α−1 −2rx −
= −y α−1
< 0 for all α ≥ 0.
x
x
α
∂y
x
−1
1+x
∂y
Q5
Answer:
J(x, y) =
1 − 3x2
−1
1
1 − 3y 2
⇒
J(0, 0) =
1 −1
1 1
.
√
T r = 2, Det = 2, λ1,2 = 1 ± √1 − 2 = 1 ± i. Thus, the fixed point at (0, 0) is an unstable spiral.
Now, if we find a number b ≥ 2, we can show that the region defined by
−b ≤ x, y ≤ b
15
√
is a trapping
region.
Thus,
b
=
2 is the smallest possible value of b for it√to be trapping. This
√
is because 2 is a root of the equation x − x3 = −x. For all values of b ≥ 2, we guarantee that
the x-nullcline only crosses y = ±b and y-nullcline only crosses x = ±b. This guarantees that the
region is trapping at all four boundaries.
16