Riemann surfaces, dynamics and geometry Course Notes C. McMullen
advertisement

Riemann surfaces, dynamics and
geometry
Course Notes
C. McMullen
June 13, 2014
Contents
1
2
3
4
5
Introduction . . . . . . . . . . . . . . . . . . . . . . . . .
1.1
Examples of hyperbolic manifolds . . . . . . . .
1.2
Examples of rational maps . . . . . . . . . . . .
1.3
Classification of dynamical systems . . . . . . . .
Geometric function theory . . . . . . . . . . . . . . . . .
2.1
The hyperbolic metric . . . . . . . . . . . . . . .
2.2
Extremal length . . . . . . . . . . . . . . . . . .
2.3
Extremal length and quasiconformal mappings .
2.4
Aside: the Smale horseshoe . . . . . . . . . . . .
2.5
The Ahlfors-Weill extension . . . . . . . . . . . .
Teichmüller theory via geometery . . . . . . . . . . . . .
3.1
Teichmüller space . . . . . . . . . . . . . . . . .
3.2
Fenchel-Nielsen coordinates . . . . . . . . . . . .
3.3
Geodesic currents . . . . . . . . . . . . . . . . . .
3.4
Laminations . . . . . . . . . . . . . . . . . . . . .
3.5
Symplectic geometry of Teichmüller space . . . .
Teichmüller theory via complex analysis . . . . . . . . .
4.1
Teichmüller space . . . . . . . . . . . . . . . . .
4.2
The Teichmüller space of a torus . . . . . . . . .
4.3
Quadratic differentials . . . . . . . . . . . . . . .
4.4
Measured foliations . . . . . . . . . . . . . . . . .
4.5
Teichmüller’s theorem . . . . . . . . . . . . . . .
4.6
The tangent and cotangent spaces to Teichmüller
4.7
A novel formula for the Poincaré metric . . . . .
4.8
The Kobayashi metric . . . . . . . . . . . . . . .
4.9
Moduli space . . . . . . . . . . . . . . . . . . . .
4.10 The mapping-class group . . . . . . . . . . . . .
4.11 Counterexamples . . . . . . . . . . . . . . . . . .
4.12 Bers embedding . . . . . . . . . . . . . . . . . . .
4.13 Conjectures on the Bers embedding . . . . . . .
4.14 Quadratic differentials and interval exchanges . .
4.15 Unique ergodicitiy for quadratic differentials . .
4.16 Hodge theory . . . . . . . . . . . . . . . . . . . .
Dynamics of rational maps . . . . . . . . . . . . . . . .
5.1
Dynamical applications of the hyperbolic metric
5.2
Basic properties of the Julia set. . . . . . . . . .
5.3
Univalent maps . . . . . . . . . . . . . . . . . . .
5.4
Periodic points . . . . . . . . . . . . . . . . . . .
5.5
Classification of periodic regions . . . . . . . . .
5.6
The postcritical set . . . . . . . . . . . . . . . . .
5.7
Expanding rational maps . . . . . . . . . . . . .
5.8
Density of expanding dynamics . . . . . . . . . .
5.9
Quasiconformal maps and vector fields . . . . . .
5.10 Deformations of rational maps . . . . . . . . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
space
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
3
9
15
19
19
21
24
24
25
28
28
29
31
37
41
44
44
45
47
48
51
53
55
55
56
57
58
59
62
62
64
67
68
68
70
71
72
76
78
80
81
81
86
6
7
8
9
5.11 No wandering domains . . . . . . . . . . . . . . . .
5.12 Finiteness of periodic regions . . . . . . . . . . . .
5.13 The Teichmüller space of a dynamical system . . .
5.14 The Teichmüller space of a rational map . . . . . .
5.15 The modular group of a rational map . . . . . . .
Hyperbolic 3-manifolds . . . . . . . . . . . . . . . . . . . .
6.1
Kleinian groups and hyperbolic manifolds . . . . .
6.2
Ergodicity of the geodesic flow . . . . . . . . . . .
6.3
Quasi-isometry . . . . . . . . . . . . . . . . . . . .
6.4
Quasiconformal maps . . . . . . . . . . . . . . . .
6.5
Quasi-isometries become quasiconformal at infinity
6.6
Mostow rigidity . . . . . . . . . . . . . . . . . . . .
6.7
Rigidity in dimension two . . . . . . . . . . . . . .
6.8
Geometric limits . . . . . . . . . . . . . . . . . . .
6.9
Promotion . . . . . . . . . . . . . . . . . . . . . . .
6.10 Ahlfors’ finiteness theorem . . . . . . . . . . . . .
6.11 Bers’ area theorem . . . . . . . . . . . . . . . . . .
6.12 No invariant linefields . . . . . . . . . . . . . . . .
6.13 Sullivan’s bound on cusps . . . . . . . . . . . . . .
6.14 The Teichmüller space of a 3-manifold . . . . . . .
6.15 Hyperbolic volume . . . . . . . . . . . . . . . . . .
Holomorphic motions and structural stability . . . . . . .
7.1
The notion of motion . . . . . . . . . . . . . . . .
7.2
Stability of the Julia set . . . . . . . . . . . . . . .
7.3
Extending holomorphic motions . . . . . . . . . . .
7.4
Stability of Kleinian groups . . . . . . . . . . . . .
7.5
Cusped tori . . . . . . . . . . . . . . . . . . . . . .
7.6
Structural stability of rational maps . . . . . . . .
7.7
Postcritical stability . . . . . . . . . . . . . . . . .
7.8
No invariant line fields . . . . . . . . . . . . . . . .
7.9
Centers of hyperbolic components . . . . . . . . .
Iteration on Teichmüller space . . . . . . . . . . . . . . .
8.1
Critically finite rational maps . . . . . . . . . . . .
8.2
Rigidity of critically finite rational maps . . . . . .
8.3
Branched coverings . . . . . . . . . . . . . . . . . .
8.4
Combinatorial equivalence and Teichmüller space .
8.5
Iteration on Teichmüller space . . . . . . . . . . .
8.6
Thurston’s algorithm for real quadratics . . . . . .
8.7
Annuli in Euclidean and hyperbolic geometry . . .
8.8
Invariant curve systems . . . . . . . . . . . . . . .
8.9
Characterization of rational maps . . . . . . . . . .
8.10 Notes . . . . . . . . . . . . . . . . . . . . . . . . .
8.11 Appendix: Kneading sequences for real quadratics
Hausdorff dimension of Julia sets . . . . . . . . . . . . . .
9.1
Quadratic polynomials . . . . . . . . . . . . . . . .
9.2
Hausdorff dimension . . . . . . . . . . . . . . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
88
89
89
93
96
98
98
99
100
102
104
105
106
107
109
110
114
115
119
120
121
123
124
125
127
129
133
138
140
143
144
145
145
145
149
151
151
154
155
158
159
163
165
166
166
167
10
11
9.3
Eigenfunctions and Hausdorff measures . .
9.4
Thermodynamics . . . . . . . . . . . . . . .
9.5
Dimension of Julia sets . . . . . . . . . . .
Teichmüller theory and the Shafarevich conjecture
10.1 Holomorphic maps contract . . . . . . . . .
10.2 The theme of short geodesics. . . . . . . . .
10.3 Review of Kleinian groups . . . . . . . . . .
10.4 Quasifuchsian groups . . . . . . . . . . . . .
10.5 Classification of surface groups . . . . . . .
10.6 Rigidity . . . . . . . . . . . . . . . . . . . .
Geometrization of 3-manifolds . . . . . . . . . . . .
11.1 Topology of hyperbolic manifolds . . . . . .
11.2 The skinning map . . . . . . . . . . . . . .
11.3 The Theta conjecture . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
168
170
177
181
182
183
183
184
185
187
188
188
190
191
1
Introduction
This course will concern the interaction between:
• hyperbolic geometry in dimensions 2 and 3;
• the dynamics of iterated rational maps; and
• the theory of Riemann surfaces and their deformations.
Rigidity of 3-manifolds. A hyperbolic manifold M n is a Riemannian manifold
with a metric of constant curvature −1. Almost all our hyperbolic manifolds will
be complete. There is a unique simply-connected complete hyperbolic manifold
Hn of dimension n, so M = Hn /Γ where Γ ⊂ Isom(Hn ) is a discrete, torsion-free
group isomorphic to π1 (M ).
In dimensions n ≥ 3 and higher, closed hyperbolic manifolds are rigid. That
is, composition of the maps
{closed hyperbolic n-manifolds}
→ {topological n-manifolds}
π
→1 {finitely generated groups}
is injective. This is:
Theorem 1.1 (Mostow rigidity) Any isomorphism ι : π1 (M ) → π1 (N ) between the fundamental groups of closed hyperbolic manifolds of dimension 3 or
more can be realized as ι = π1 (f ) where f : M → N is an isometry.
It follows that geometric invariants such as vol(M ), the hyperbolic length
ℓ(γ), γ ∈ π1 (M ), etc. are (in principle) completely determined by the topological manifold M , or even more combinatorially, by π1 (M ). Prasad extended this
result to finite volume manifolds.
In dimension 3 remarkable results of Thurston suggest that this rigidity
coexists with just enough flexibility that most 3-manifolds are hyperbolic. Thus
the ‘forgetful map’ above is almost a bijection. For example one has:
Theorem 1.2 (Thurston) If M is a closed Haken 3-manifold, then M is hyperbolic iff π1 (M ) is infinite and does not contain Z ⊕ Z.
One can also compare the situation for manifolds of dimension 2. Closed,
orientable surfaces are classified by their genus g = 0, 1, 2, . . . and they always
admit metrics of constant curvature. For the sphere (g = 0) this metric is (essentially) unique, but for the torus there is already a moduli space (H/ SL2 (Z)).
Any surface of genus g ≥ 2 admits a complex structure, depending on 3g − 3
complex parameters, and each complex structure has a unique compatible hyperbolic metric.
Teichmüller space parameterizes these structures and will play a crucial role
in the construction of rational maps and 3-manifolds with prescribed topology.
1
For 3-manifolds our goal is to understand some examples of hyperbolic manifolds, prove Mostow rigidity and related results, and give an idea of Thurston’s
construction of hyperbolic structures on Haken manifolds.
Dynamical systems. Any hyperbolic 3-manifold M gives rise to a conformal
b thought of as the
dynamical system by considering the action of π1 (M ) on C
+
3
3
b = PSL2 (C).
sphere at infinity for H . We have Isom (H ) = Aut(C)
Iterated rational maps provide another source of conformal dynamics on the
Riemann sphere. These maps exhibit both expanding and contracting features.
For example, let
b →C
b
f :C
be a rational map of degree d > 1. Then
Z
b
|(f n )′ (z)| |dz|2 = dn area(C)
b
C
tends to infinity exponentially fast as n → ∞. Here | · | denotes the spherical
metric. On the other hand, f has 2d − 2 critical points where f is highly
contracting.
There are surprisingly many similarities between the theories of rational
maps and of Kleinian groups. For example the following rigidity result holds:
Theorem 1.3 (Critically finite rigidity) Let f and g be rational maps all of
whose critical points are preperiodic. Then with rare exceptions, any topological
conjugacy between f and g can be deformed to a conformal conjugacy. (In the
exceptional cases, f and g are double-covered by an endomorphism of a torus.)
On the other hand, Thurston has also given a geometrization theorem characterizing rational maps among branched covers of the sphere. The method of
proof parallels the more difficult geometrization result for Haken 3-manifolds.
Understanding the case of rational maps is good preparation for the 3-dimensional
theory, like adaptive excursions from the base camp at 17,000 feet on Mt. Everest.
An exhaustive theory of dynamical systems is probably unachievable. One
b and for most
usually tries to understand the behavior of f n (z) for most z ∈ C,
f ∈ Ratd .
A rational map f is structurally stable if all sufficiently nearby maps g are
topologically conjugate to f . Despite the many mysteries of general rational
maps, one knows:
Theorem 1.4 The set of structurally stable rational maps is open and dense.
Many of the components of the structurally stable maps are encoded by
critically finite examples, so we are approaching a classification theory in this
setting as well.
References. For a brief survey of the iterations on Teichmüller space for
rational maps and Kleinian groups, see [Mc3]. For a proof of the density of
2
structural stability in Ratd , see [MSS] or [Mc4]. Speculations on the role of
structural stability in the biology of morphogenesis and other sciences can be
found in [Tm].
1.1
Examples of hyperbolic manifolds
A Kleinian group Γ is any discrete subgroup of Isom(H3 ). Its domain of discontib is the largest open set on which Γ acts properly discontinuously.
nuity Ω(Γ) ⊂ C
b − Ω(Γ) can also be defined as Γx ∩ C
b n−1 for any x ∈ H3 .
The limit set Λ(Γ) = C
We say Γ is elementary if it is abelian, or more general if it contains an
abelian subgroup with finite index. Excluding these cases, Λ is also the closure
of the set of repelling fixed-points of γ ∈ Γ, and the minimal closed Γ-invariant
set with |Λ| > 2.
The quotient M = H3 /Γ is an orbifold, and a manifold if Γ is torsion-free.
The Kleinian manifold
M = (H3 ∪ Ω(Γ))/Γ
has a complete hyperbolic metric on its interior and a Riemann surface structure
(indeed a projective structure) on its boundary.
We now turn to some examples.
1. Simply-connected surfaces and 3-space. The unit disk ∆ and the upper half-plane H in C are models for the hyperbolic plane with metrics 2|dz|/(1 − |z|2 ) and |dz|/ Im(z) respectively. We have Isom+ (H) =
PSL2 (R) acting by Möbius transformations.
The geodesics are circular arcs perpendicular to the boundary, in either
model.1
Similarly Hn+1 can be modeled on the upper half-space {(x0 , . . . , xn ) :
x0 > 0} in Rn+1 , with the metric |dx|/x0 ; or on the unit ball with the
metric 2|dx|/(1 − |x|2 ).
Planes in H3 are hemispheres perpendicular to the boundary. Reflections
b prolong to isometric reflections through hyperplane
through circles on C
3
b = PSL2 (C)
in H , and lead to the isomorphism Isom+ (H3 ) = Aut(C)
acting by Möbius transformations.
b By a generalization of the Riemann mapping theorem, the
2. Domains in C.
b with |C
b − Ω| ≥ 3. Thus
unit disk covers (analytically) any domain Ω ⊂ C
any such Ω is a hyperbolic surface.
3. Examples with π1 (M ) = Z.
1 The unit disk ∆ can be taken as a model of either RH2 or CH1 ; for the latter space the
natural metric is |dz|/(1 − |z|2 ) with constant curvature −4. The symmetric space CHn , n > 1
contains copies of both RH2 and CH1 , with curvatures −1 and −4 respectively. The space
CHn can be modeled on the unit ball in Cn with its Hermitian invariant metric, e.g. the
Bergman metric.
3
(a) The punctured disk ∆∗ = H/hz 7→ z + 1i; the covering map H → ∆∗
is given by π(z) = e2πiz . A neighborhood of the puncture has finite
volume. The limit set is Λ = {∞}.
(b) The annulus A(r) = {z : r < |z| < 1}. We have A(r) = H/λZ , λ > 1,
with the covering map H → A(r) given by
π(z) = z 2πi/ log λ .
Note that π(λz) = π(z) and π(R+ ) = S 1 , the unit circle. π(R− ) =
S 1 (r) where r = exp(−2π 2 / log λ), so λ = exp(2π 2 / log(1/r)).
Thus the length of the core geodesic of A(r) is 2π 2 / log(1/r). For
example this shows A(r) and A(s) cannot be isomorphic if r 6= s.
Λ = {0, ∞}.
(c) The torus X = C∗ /λZ is isomorphic to C/(2πiZ ⊕ log λZ).
(d) The space H3 /λZ is a solid torus with core curve of length log λ.
4. Pairs of pants, genus two and handlebodies. Now consider 3 disjoint
geodesic in ∆ symmetric under rotation. The group Γ′ generated by reflections through these geodesics gives a quotient orbifold which is a hexagon
with alternating edges removed. The limit set is a Cantor set.
Let Γ ⊂ Γ′ be the index two subgroup preserving orientation. This is the
familiar subgroup
Γ∼
= Γ′ .
= Z ∗ Z ⊂ hA, B, C : A2 = B 2 = C 2 = 1i ∼
= hAB, ACi ∼
Then ∆/Γ′ is a pair of pants, i.e. the double of the hexagon.
b − Ω; the quotient X is the double of
Next consider the action of Γ on C
a pair of pants, namely a surface of genus two. A fundamental domain
is the region outside of 4 disjoint disks. Looking at the region above the
hemispheres these disks bound, we see M = H3 /Γ is a handlebody of
genus two.
Conversely, for any Riemann surface X of genus two, the realization of
X as the boundary of a topological handlebody M determines a planar
covering space Ω → X which can be compactified to the sphere. The
action of Z ∗ Z = π1 (M ) on Ω extends to the sphere and gives a Kleinian
group.
5. Surfaces of genus two. It is familiar from the classification of surfaces
that a torus can be obtained from a 4-gon by identifying opposite sides,
a surface of genus 2 from an 8-gon, and a surface of genus g from a 4ggon. The resulting cell complex has only one vertex, where 4g faces come
together.
A regular octagon in H with interior angles of 45◦ serves as a fundamental
domain for a Fuchsian group such that H/Γ = X has genus two. Extending
the action to H3 we obtain a compact Kleinian manifold M ∼
= S × [0, 1].
4
6. The triply-punctured sphere. There is only one ideal triangle T in H, and
b − {0, 1, ∞}. The
by doubling it we obtain hyperbolic structure on X = C
covering map π : H → X can be constructed by taking the Riemann mapping from T to H, sending the vertices to {0, 1, ∞}, and then prolonging
by Schwarz reflection.
The corresponding group is arithmetic, indeed X = H/Γ(2).
We have Aut(X) = S3 = SL2 (Z/2), which can be seen as the permutation
group of the cusps of X.
The fact that X is covered by H proves the Little Picard Theorem: an
entire f : C → C omitting 2 values is constant. Indeed, the omitted values
can be taken to be 0 and 1; then f lifts to the universal cover, giving a
map fe : C → H which must be constant.
7. Punctured tori. To handle a torus we need to delete a point so the Euler
characteristic becomes negative. Then we can take as a fundamental domain an ideal quadrilateral, and glue opposite sides. (It is essential to be
careful doing the gluing! So the holonomy around a cusp is parabolic.)
These examples can be perturbed to give Poincaré’s examples of quasifuchsian groups, by taking reflections in a necklace of 4 tangent circles.
8. A compact hyperbolic 3-manifold. Here is an example to which Mostow
rigidity applies: take a regular hyperbolic dodecahedron D with internal
dihedral angles 72◦ = 2π/5. Then identify opposite faces making a twist
of 3/10ths of a revolution. The 30 edges of D are identified in six groups
of 5 each, so we obtain a manifold structure around each edge. The link
of a vertex is orientable and admits a metric of constant curvature 1, so
it is a sphere. (In fact there is only one vertex in D/ ∼, and its link is an
S 2 tiled by 20 triangles in the icosahedral pattern.)
9. The Hopf link. As a warmup to a hyperbolic link complement, let’s look
at the Hopf link L ⊂ S 3 , which can be thought of as a pair of disjoint
geodesics. Then M = S 3 − L = S 1 × S 1 × (0, 1); note that we have omitted
the boundary, so M is open.
We claim S 3 − L can be obtained from an octahedron by identifying sides
in a suitable pattern, then deleting two vertices (say the north and south
poles).
To see this, first write L = K0 ⊔ K1 . Then T = S 3 − K0 is a solid torus T ,
and M = S 3 − L is just the complement of the core curve in T , T − K1 .
To obtain a cell, cut T along a disk to obtain a solid cylinder C; then K1
becomes an interval I1 joining the ends of C. Now cut along a rectangle
joining the round part of ∂C to I1 , and open it up. The result is like a
split log. Shrink the parts of the boundary running along K0 and K1 to
points, which will become the north and south poles. We obtain a ball
with 4 longitudes joining the poles. Adding a square of 4 more edges to
form the equator, the result is an octahedron.
5
Thus the face identifications preserve the northern and southern hemispheres, and match each quadrant to its ‘opposite’ quadrant in the same
hemisphere.
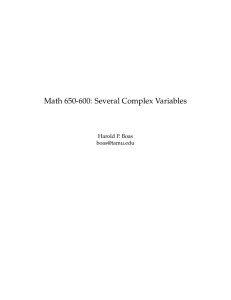
10. The Whitehead link. The Whitehead link W ⊂ S 3 is a symmetric link of
two unknots, with linking number zero, but one clasp.
Figure 1. The Whitehead link; vol(S 3 − W ) = 3.66386 . . .
Its complement M = S 3 − W has a finite volume hyperbolic metric that
can be obtained from a regular ideal octahedron in H3 by a suitable gluing
pattern. To see this, first note that for the unknot K0 , S 3 − K0 is a solid
torus D2 × S 1 . Thus M = D2 × S 1 − K1 for a certain knot K1 with
winding number zero.
Cutting D2 × S 1 with a disk D = D2 × {t} meeting K in two points, we
obtain a cylinder D2 × [0, 1] from which a pair of intervals I1 ⊔ I2 must be
removed.
After a little deformation, we can replace D2 ×[0, 1] with a cube C = [0, 1]3 ,
and the two intervals with segments joining interior points of opposite
faces. The original knot K0 now corresponds to 8 of the 12 edges of C.
To obtain a 3-cell, we cut C − (I1 ∪ I2 ) along rectangles Ri joining Ii
to an adjacent face. Then we obtain a cell structure on S 2 = ∂D3 with
4 pentagons and 4 quadrilaterals. Each pentagon has 2 edges along K0 ,
and each quadrilateral has 1 edge along K1 . Collapsing these edges, these
faces become triangles, and we obtain an octahedron.
The combinatorics are shown in Figure 2. On the left, the dotted lines correspond to the two components of the link. Faces with the same letter are
identified by orientation–reversing maps. The two A faces are identified
by folding along the dotted edge they share; similarly for B. The adjacent
C faces are not folded together, however; the folding is composed with a
180◦ twist (and similarly for D). This twist serves to bring the dotted
edges for A and B together, so they link up to form one component of the
link.
The dihedral angles of a regular octahedron are 90◦ , so it can be reglued
to give a hyperbolic structure on S 3 − W .
6
A cross-section of each vertex of the octahedron gives a square. Thus the
toruses associated to each component of W are built from 2 square and
4 squares respectively. However these two tori must are isomorphic (!),
since the Whitehead link is symmetric.
C
C
B
C
A
A
A
D
B
B
C
D
B
A
D
D
Figure 2. Building the Whitehead link complement from an octahedron.
11. Arithmetic examples. Let Od √be the ring of algebraic integers in the
quadratic number field K = Q( −d), d ≥ 1. Then Od ⊂ C is discrete, so
SL2 (Od ) is a Kleinian group. In fact Md = H/ SL2 (Od ) is a finite-volume
orbifold (Borel), with as many cusps as the class number of K.
The Whitehead link and Borromean rings complements are commensurable H3 / SL2 (Z[i]), and the figure eight knot to SL2 (Z[ω]) (the Gaussian
and Eisenstein integers respectively). Both have class number one.
Theorem 1.5 (Thurston) A knot complement M = S 3 −K admits a complete
hyperbolic structure of finite volume iff M is atoroidal: that is, iff every copy of
Z ⊕ Z in π1 (M ) comes from a tubular neighborhood of the knot.
Example. For trefoil knot T2,3 , and more generally any torus knot, Tp,q , the
complement Mp,q = S 3 − Tp,q is toroidal. In fact Mp,q is a Seifert fibered
manifold; it admits a nontrivial S 1 action. This action gives rise to many
nontrivial copies of Z ⊕ Z in π1 (Mp,q ).
To see the S 1 action, first think of S 3 as the unit sphere in C2 . The circle
action on S 3 by
(z1 , z2 ) 7→ (epiθ z1 , eqiθ z2 ).
A generic orbit is a (p, q)-torus knot, so its complement admits an S 1 action.
To visualized an immersed incompressible torus in the complement of the
trefoil knot, imagine T2,3 as a cable lying on a torus Σ = S 1 × S 1 ⊂ S 3 . Try
to wrap the torus Σ in paper, avoiding the cable. Passing the paper alternately
under and over the cable, it closes up to make an immersed torus.
7
Figure 3. Tiling of the Z2 ⋉ Z cover of the figure eight knot complement.
The figure eight knot. The simplest hyperbolic knot complement is M =
S 3 − K where K is the figure eight knot. The hyperbolic manifold M can be
built from 2 regular ideal tetrahedra.
One can describe M concretely the complement T ∗ of the zero section of
the torus bundle T → S 1 with monodromy A = P Q = ( 12 11 ) = ( 10 11 ) ( 11 01 ).
This factorization of A into elementary matrices determines a sequence of triangulations of the plane which are related by cobordisms through tetrahedra
(see Figure 3). By inspection, six tetrahedra are adjacent to each edge of the
resulting triangulation of the one-point compactification of M . Since the dihedral angles of a regular hyperbolic tetrahedron are all 60◦ , M can be given
a complete hyperbolic structure. There are just 2 edges in the quotient, with
six tetrahedra coming together along an edge (like equilateral triangles tiling a
hexagon).
We note that the figure eight knot (which includes the information of the
embedding of M into S 3 ) can be constructed as the Murasugi sum of two Hopf
bands, which makes clear that it is a fibered knot and that its monodromy is
the product of two Dehn twists, P and Q. Indeed, the Hopf link complement
itself can be regarded as the fibered link obtained by suspending a single Dehn
twist on a annulus. Here we have arranged that the monodromy is the identity
on the boundary of the fiber, and that the resulting framing of the boundary
corresponds to the framing of the Hopf link by meridians and by fiber. If we
had, instead, use the identity map on the annulus, we would have obtained the
same 3-manifold, but now presented as the complement of a link in S 2 × S 1 .
Reflection groups. Quite generally, one can consider any convex polyhedron
P in Hn , Rn or S n whose dihedral angles are of the form θi = π/ni . Then the
group Γ generated by reflections in the sides of P is discrete, and P forms a
fundamental domain for Γ. The proof is by induction on the dimension of P
(see e.g. [Rat, §7]).
3-dimensional pairs of pants. A pair of pants is associated to each triangle in
H2 with vertices outside the plane. Similary we can consider regular tetrahedra
with vertices outside H3 . For each n ≥ 7 there is a unique such tetrahedron Pn
such that its ‘convex core’ Kn is bounded by four 2π/n triangles and by four
8
Figure 4. Fundamental polyhedron P7 .
right hexagons.
The four faces of Pn are simply four circles in the sphere meeting with
dihedral angles of π/n. The example P7 is depicted in Figure 4. Note that 3 of
the circles simply determine the (2, 3, 7) triangle group acting on a copy of H,
namely the common perpendicular circle (shown as a dotted line). Reflections
in the sides of Pn generate a discrete group Γn for all n; when n is even, Pn is
a fundamental domain for this group.
As n → ∞ the limit sets for these reflection groups tend to the limit set for
the Apollonian gasket. See Figure 5 for exaples.
One can glue several copies of Kn , thought of as an orbifold, together along
their triangular faces, in a pattern dictated by any 4-valent graph, just as a
3-valent graph gives a gluing pattern for pairs of pants. In this way one obtains
many compact, hyperbolic 3-manifolds with π1 (M ) mapping surjectively to a
free group.
1.2
Examples of rational maps
b →C
b be a rational map. We will be interested in f as a dynamical
Let f : C
system; that is, we will study the iterates
f n (z) = (f ◦ f ◦ . . . ◦ f )(z).
|
{z
}
n times
b is the sequence
Orbits and periodic points. The forward
orbit of z ∈ C
S
−n
2
hz, f (z), f (z), . . .i. The backward orbit is n≥0 f (z).
b is periodic if f n (z) = z; the least such n > 0 is its period.
A point z ∈ C
The eigenvalue, derivative or multiplier of a periodic point is the complex
number λ = (f n )′ (z). A periodic point is attracting, repelling, or indifferent
if its multiplier is < 1, > 1 or = 1. A periodic point is superattracting if its
multiplier is zero. Sometimes attracting is meant to exclude superattracting.
9
Figure 5. Limit sets from regular tetrahedra with vertices beyond infinity; the
cases n = 7, 8, 12, ∞.
10
A cycle is a finite set cyclically permuted by f , i.e. the forward orbit of a
periodic point. A periodic point is superattracting iff its cycle includes a critical
point of f .
Conjugacy. Two dynamical systems f1 , f2 are conjugate if φf1 φ−1 = f2 .
Conjugacies ‘preserve the dynamics’, e.g. φ sends periodic points to periodic
points. The quality of φ determines the amount of structure of f which is
preserved (e.g. topological, measurable, quasiconformal, conformal).
b→C
b is conformal, then f1 and f2 are equivalent
For rational maps, if φ : C
or isomorphic. Conformal conjugacy preserves multipliers.
b is normal if every
Normal families. A collection of analytic maps fα : U → C
b or
sequence has a convergence subsequence. Here U can be an open subset of C
more generally a complex manifold.
Theorem 1.6 Any bounded family
is normal. More genS of analytic functions
b
erally, if F is not normal then fα (U ) is dense in C.
Proof. First suppose |f (z)| ≤ M for all f ∈ F . Using a chart we reduce to the
case X = ∆. By Cauchy’s formula, we have
1 Z
f (ζ) dζ M
′
|f (z)| = ≤
2πi S(z,r) (ζ − z)2 r
for any r < d(z, ∂∆). This shows F is equicontinuous, so by the Arzela-Ascoli
theorem F is normal.
More generally, if F omits B(w, r), then letting M (z) = 1/(z − w) we see
the family
M ◦ F = {M ◦ f : f ∈ F }
is bounded by 1/r, and normality of F follows from normality of M ◦ F .
b such that the
The Julia set. The Fatou set Ω(f ) is the largest open set in C
n
family of iterates hf : n ≥ 0i forms a normal family when restricted to Ω(f ).
b − Ω(f ), is the Julia set.
Its complement, J(f ) = C
Theorem 1.7 Let J(f ) be the Julia set of a rational map f . Then:
• The Julia set is closed and totally invariant; that is, f −1 (J(f )) = f (J(f )) =
J(f ).
S
b
• If an open set U meets J(f ) then f n (U ) = C.
b or J(f ) is nowhere dense.
• Either J(f ) = C
Proof. These assertions follow from the definition of normalization and Theorem 1.6.
11
Order and chaos. Since the iterates hf n i have limit on Ω(f ), orbits of nearby
points stay close together. Thus the dynamical behavior of hf n (z)i, z ∈ Ω(f ),
is predictable — it is not highly sensitive to the exact position of z.
We will show every z ∈ Ω(f ) is either attracted to a periodic cycle, or lands
in a disk or annulus subject to an irrational rotation.
On the other hand, the Julia set is the locus of chaotic behavior, where a
small change z can product a vast change in its forward orbit. For example, we
will see (Theorem 5.7) the Julia set is the same as the closure of the repelling
periodic points for f .
Examples of rational maps.
1. Degree one. Any Möbius transformation f (z) is hyperbolic, parabolic,
elliptic irrational or of finite order.
In the hyperbolic case up to conjugacy f (z) = λz, |λ| > 1, and all points
but z = 0 are attracted to infinity. Then J(f ) = {0, ∞} and
Ω(f )/f = C∗ /λZ = C/(Z2πi ⊕ Z log λ).
In the parabolic case, we can take f (z) = z + 1 and then Ω(f )/f = C∗ .
This quotient can arise as a limit of degenerating tori, e.g. when fn (z) =
λn z + 1, |λn | > 1 and λn → 1.
In the irrational elliptic case, we can put f in the form f (z) = exp(2πiθ)z,
θ ∈ R − Q, and the orbits are dense subsets of the circles |z| = r.
b is the (q, q)
In the finite order case, we have f (z) = exp(2πip/q), and C/f
orbifold.
2. f (z) = z 2 . Here J(f ) = S 1 . Clearly f n (z) → 0 or ∞ when |z| 6= 1, and f
has a dense set of repelling periodic points on S 1 .
3. Blaschke products. For |a| < 1 let
f (z) = z
z+a
1 + az
.
Theorem 1.8 The Julia set of f (z) is S 1 , the action of f on S 1 is ergodic,
and every point outside S 1 is attracted to z = 0 or z = ∞.
Proof. Clearly f (z) has an attracting fixed-point of multiplier a at z = 0,
and since |f (z)| < |z| in the disk we see every z ∈ ∆ is attracted to the
origin under iteration. By symmetry points outside the circle are attracted
to infinity. Thus f n cannot be normal near S 1 , so J(f ) = S 1 .
As for ergodicity, let E ⊂ S 1 be a set of positive measure such that
f −1 (E) = E, and let u : ∆ → [0, 1] be the harmonic extension of the
indicator function χE (z). Then by invariance, u(z) = u(f (z)) and thus
u(z) = lim u(f n (z)) = u(0)
for all z ∈ ∆. Since u is constant, E = S 1 .
12
The Blaschke products are strongly reminiscent of Fuchsian groups.
4. An interval. Let f (z) = z 2 − 2. We claim J(f ) = [−2, 2], and every point
outside this interval is attracted to infinity.
Indeed, f is a quotient of F (z) = z 2 ; setting p(z) = z + z −1 , we have
f (p(z)) = p(F (z)). Thus the Julia set is the image of the unit circle, and
the rest follows.
5. A Cantor set. Let f (z) = z 2 −100. Then the preimages of the critical point
z = 0 are z = ±10. The ball B(0, 20) is disjoint from the critical value
z = −100, so its preimage f −1 (B(0, 20)) is a pair of disks D± ‘centered’
at z = ±10, each of radius about 1, since |f ′ (10)| = 20. The two branches
of the inverse of f , mapping B(0, 20) into these disks, are contractions, by
a factor of about 20. Thus J(f ) is a Cantor set, and every point outside
the Cantor set is attracted to infinity.
In this example the fact that f : (D− ∪ D+ ) → B(0, 20) is a covering map
is an example of the following basic principle:
b be an open set disjoint from the critical values of f ,
Let V ⊂ C
and let U = f −1 (V ). Then f : U → V is a covering map.
Proof: f : U → V is a proper local homeomorphism.
6. Lattès examples. Here is another example of a quotient dynamical system
b
(like z 2 − 2). In this example, J(f ) = C.
Let X √
= C/(Z ⊕ iZ) and define F : X → X by F (z) = (1 + i)z. Then
|F ′ | = 2 everywhere and it is easy to see repelling periodic points of F
are dense on X.
b be (essentially) the Weierstrass ℘-function, presenting X
Let p : X → C
as a 2-fold cover branched over 0, ±1 and ∞ (by symmetry). Note that
p identifies x and −x, so its critical points are the 4 points of order 2 on
X (the fixed-points of x 7→ −x). Since F (−x) = F (x), there is a degree 2
b →C
b such that
rational map f : C
F
X −−−−→ X
py
py
commutes. From this we find:
f
b −−−
b
C
−→ C
f (z) =
z−i
z+i
2
.
Since repelling points are dense for F , they are also dense for f , and thus
b
J(f ) = C.
13
c_3
c_1
c_4
c_2
Figure 6. Action of F (z) = (1 + i)z on points of order two.
Figure 7. Orbit of Lattés example f (z) = (z − i)2 /(z + i)2 .
Deriving the formula. Here is how the formula for f was found. The
critical points {c1 , c2 , c3 , c4 } of p are the points of order 2 on X. Under
F , these points map by
c1 , c2 7→ c3 7→ c4 7→ c4 .
(See Figure 6.)
b has critical
We can arrange that the 2-fold branched covering p : X → C
values ei = p(ci ) with {e1 , e2 , e3 , e4 } = {0, ∞, 1, −1}.
b is a critical value of f (z) = p◦F ◦p−1 (z) exactly when w = p(z)
Now z ∈ C
is a critical point of p, but F −1 (w) is not. Thus the critical values of f
are {p(c1 ), p(c2 )} = {e1 , e2 } = {0, ∞}. Therefore f (z) = M (z)2 for some
Möbius transformation M .
Since f (0) = f (∞) = e3 = 1, we have M (0)2 = M (∞)2 = 1, so we can
write M (z) = (bz − a)/(bz + a). (Of course M (z) and −M (z) give the
same map, so M is only determined up to sign.) From f (1) = −1 and
f (−1) = −1 we find a = i and b = 1.
Note that F is ergodic on X, preserving the measure |dz|2 . Thus f is
14
b with respect to the push-forward of this measure, namely
ergodic on C,
ω=
|dz|2
·
|z||z − 1||z + 1|
Thus the orbits of f concentrate near {0, ∞, ±1}. See Figure 7.
Orbifold picture. The map f has a simple picture in terms of orbifolds.
b as the double of a square S. The
Namely, think of the Riemann sphere C
b into a (2, 2, 2, 2)-orbifold X, admitting a
Euclidean metric on S makes C
symmetry ι : X → X obtained by rotating the square 180◦ around its
center. The quotient X/ι also has signature (2, 2, 2, 2), and in the induced
Euclidean metric it is similar to X.
Thus we obtain a degree two covering map (of orbifolds) f : √
X → X,
expanding the (singular) Euclidean metric on X by a factor of 2. Since
f is conformal, it is also a rational map, and f is (conjugate to) the map
we have described above.
A mechanical version of this map is well-known in origami: you can fold
the corners of a square towards the center to make a smaller square of 1/2
the original area.
These combinatorial constructions of branched covers are very simple examples of dessins d’enfants, cf. [Sn].
7. f (z) = z 2 − 1. Here 0 7→ −1 7→ 0, so an open set is (super)attracted to
a cycle C of order two. What other kinds of behavior can result? For
example, can there be another attracting cycle?
In Figure 8 the points attracted to C are colored gray; the Julia set is
black, and f n (z) → ∞ for z in the white region.
We will eventually show that whenever f (z) = z 2 + c has an attracting
cycle C, all orbits outside J(f ) converge to C or to ∞ (Corollary 5.25).
Figure 8. Dynamics of f (z) = z 2 − 1.
1.3
Classification of dynamical systems
To put this theory in context, we first mention some general notions in dynamics. Classically dynamics emerges from the theory of differential equations. By
15
taking the flow for a given time, we obtain a diffeomorphism of a manifold,
f : M → M . It is also interesting to study groups of maps (e.g. Kleinian
groups) and maps that are not invertible (e.g. rational maps with deg(f ) > 1.)
Consider the category whose objects are diffeomorphisms of manifolds, f :
M → M . These objects can be equipped with various morphisms. For example,
we can regard diffeomorphisms h : M → N such that h ◦ f = g ◦ h as the morphisms between (M, f ) and (N, h). In this category, two objects are isomorphic
if they are smoothly conjugate.
If we allow h instead to be a homeomorphism, then we obtain the notion of
topological conjugacy. If we allow h to simply be continuous, then the morphisms
are semiconjugacies.
Program of dynamics. A central and difficult problem is to classify dynamical
systems. Progress can be made in specific families.
Examples.
1. The family of dynamical systems fλ (x) = λx, λ ∈ R∗ . There are six
topological conjugacy classes. A useful observation is that h(x) = xα
conjugates x 7→ λx to x 7→ λα x.
2. The family fθ (z) = e2πiθ z, |z| = 1 in C. Here fθ is topologically conjugate
to fα iff α = ±θ mod Z. One approach to the proof uses unique ergodicity
of an irrational rotation. Any topological conjugacy h must preserve this
measure and so h is an isometry.
In this example there are uncountably many topological conjugacy classes.
3. Let f : S 1 → S 1 be a ‘generic’ C k diffeomorphism. (Note: C ∞ diffeomorphisms do not form a Baire space.) Then f has rotation number p/q, and
the periodic points of f consists of mq pairs of alternating attracting and
periodic points (organized into m pairs of cycles). Under iteration, every
point converges to one of the m attracting cycles. A model for f is given
by taking an mq-fold covering of a hyperbolic Möbius transformation acting on the circle, and composing with a deck transformation. Thus f is
determined up to conjugacy its rotation number p/q and the number of
attracting cycles m.
Definition. Let M be a compact manifold. A map f ∈ Diff(M ) is structurally
stable if there is an open neighborhood U of f such that g is topologically
conjugate to f (f ∼ g) for all g ∈ U .
By definition, the structurally stable set Ω ⊂ Diff(M ) is open. Since Diff(M )
is separable, Ω has at most a countable number of components. Thus there at
most a countably number of topological forms for structurally stable dynamical
systems.
Program of dynamics. One of the overarching programs in dynamics can
be described as follows. Fixing attention on a particular family of dynamical
systems, one tries to:
1. Show most maps are structurally stable.
16
2. Provide models for, and classify topologically, the structurally stable maps.
3. Find continuous moduli to parameterize each component of the structurally stable regime.
Example. This program can be successfully carried out for Diff(S 1 ). Namely,
(1) the structurally stable maps are indeed dense, (2) the rotation number p/q
and number of attracting cycles provide topological invariants, and models are
easily constructed; and (3) the eigenvalues at the periodic points provide continuous moduli.
Rational maps. Our main goal is to carry through this program for rational
b → C.
b We will find:
maps f : C
1. Structurally stable rational maps are indeed open and dense. Holomorphic
motions, the λ-lemma and univalent mappings provide methods of proof.
2. Topological models can be given for rational maps. Indeed, Thurston
has characterized rational maps among critically finite branched covers of
the sphere. The method here is iteration on Teichmüller space — a toy
version of the same discussion that leads to the geometrization of Haken
manifolds.
3. Moduli for rational maps can be given in terms of the Teichmüller space
of a quotient Riemann surface. Typically these moduli boil down to eigenvalues at attracting cycles, much as in the case of generic diffeomorphisms
of S 1 .
Expanding maps. We now turn to another example of structural stability. A
map f : S 1 → S 1 is expanding if there is a λ > 1 such that |f ′ (x)| ≥ λ > 1 for
all x ∈ S 1 ∼
= R/Z. Then f is a covering map, and d = deg(f ) satisfies |d| ≥ 2.
Clearly the expanding maps are open in the space of smooth endomorphisms
of S 1 . We now show that all maps of a given degree are topologically conjugate.
Theorem 1.9 Any two expanding maps f : S 1 → S 1 of degree d are topologically conjugate.
Proof. Lifting to the universal cover, we obtain a map f : R → R satisfying
f (x + 1) = f (x) + d. Let g(x) = dx. It is enough to construct a homeomorphism
h such that h ◦ f = g ◦ h. Since f is expanding, it clearly has a fixed-point, and
we can choose coordinates so that f (0) = 0. Then f (k) = dk for all k ∈ Z.
If h exists then it formally satisfies h = g −n ◦ h ◦ f n . To solve this equation,
we replace h on the right with the identity, and then take a limit as n → ∞.
More precisely, let
f n (x)
.
hn (x) = g −n ◦ f n (x) =
dn
Now if x ∈ [k, k + 1] then f (x) ∈ [kd, kd + d] and thus d−1 f (x) ∈ [k, k + 1] as
well. It follows that |hn+1 (x) − hn (x)| ≤ 2d−n . Thus hn (x) converges uniformly
17
to a continuous limit h(x). Moreover h is monotone increasing and satisfies
h(x + 1) = h(x) + 1, so it descends to a map on the circle.
To complete the proof we must show h is 1-1. Since h is monotone, if it fails
to be injective there is a nontrivial interval I ⊂ S 1 such that h(I) is a single
point. But since f is expanding, there is an n > 0 such that f n (I) = S 1 . Then
we must also have g n (h(I)) = S 1 , which is impossible if I is collapsed by h.
Therefore h is a homeomorphism.
An analysis of the last step in the proof shows:
1. Even if f is not expanding, it is semiconjugate to x 7→ dx.
2. To get a conjugacy, it suffices that f is LEO (locally eventually onto): for
every open interval I ⊂ S 1 there exist an n such that f n (I) = S 1 .
3. If f is expanding, then |h(I)| > C|I|α where α = log d/ log λ. Thus the
conjugacy and its inverse are Hölder continuous.
Motion of periodic points. An alternative approach to the proof is to consider a family of expanding maps ft (z) connecting f (z) to g(z). Then one can
follow the periodic points along and obtain not just a homeomorphism but an
isotopy ht (z) of conjugacies. This idea leads to the holomorphic motions we use
for rational maps.
Failure of structural stability. Although structural stability is dense in
Diff(S 1 ), it fails to be dense in Diff(M ) for higher-dimensional manifolds. The
first result in this direct was [Sm]:
Theorem 1.10 Structural stability is not dense in Diff(M ) for M = R3 /Z3 the
3-torus.
Proof. It is known that an Anosov map on the 2-torus X = R2 /Z2 , such as
f (x) = Ax with A = ( 21 11 ), is structurally stable. Extend f to a map of the
3-torus M = X × R/Z so that f fixes X0 = X × {0} and is highly contracting
normal to X0 . This can be done so that the stable manifolds W s (p), p ∈ X0 ,
give a codimension-1 foliation of M .
Next, arrange that f has a hyperbolic fixed-point q = (0, 0, 1/2) that is
locally contracting on X1/2 and expanding along (0, 0) × S 1 . Finally arrange
that the unstable manifold W u (q) has an isolated tangency to W s (p), some
p ∈ X0 .
The entire picture persists for all g in some neighborhood U of f . Let us
say g is ‘rational’ if W u (q) is tangent to W s (p) for some periodic point p on
X0 . This property is a topological invariant. The set of leaves through periodic
points is countable and dense, so the set of rational g is also dense. Similarly,
the set of irrational g is dense. Thus structural stability fails throughout U .
18
Shifts. The classical Smale horseshoe, with a dense set of saddle points and a
basic set isomorphic to the two-side shift, cannot occur in conformal dynamics,
even topologically. Indeed the moduli of the two quadrilaterals involved cannot
agree. See §2.4.
On the other hand the one-sided shifts (Σn , σ) arise frequently, for example
inside z 2 + c with |c| large.
Notes. See [AS] and [Wil] for more on the failure of structural stability to
be dense. For ideas connecting structural stability and bifurcations to physical
sciences and biology, see [Tm].
2
Geometric function theory
This section provides background in geometric methods of complex analysis.
Basic references for Teichmüller theory include [Ah2], [Le].
2.1
The hyperbolic metric
Theorem 2.1 (Schwarz lemma) Let f : (∆, 0) → (∆, 0) be holomorphic.
Then |f ′ (0)| ≤ 1, and equality holds iff f (z) = eiθ z.
Proof. Apply the maximum principle to f (z)/z.
Corollary 2.2 Aut(H) = Isom+ (H), the isometry group of the hyperbolic metric ρH = |dz|/y, z = x + iy.
Proof. By the Schwarz lemma, an automorphism fixing the origin in ∆ is
the restriction of a Möbius transformations. Since the Möbius transformations
b
act transitively on ∆, we see Aut(∆) is the subgroup P SU (1, 1) of Aut(C)
preserving the disk.
Similarly, Aut(H) = PSL2 (R). To see that Aut(H) preserves ρH , just check
invariance under (i) z 7→ z + t, t ∈ R; (ii) z 7→ az, a > 0; and (iii) z 7→ 1/z; and
observe these maps generate PSL2 (R).
Alternatively, note that
2|dz|
,
ρ∆ =
1 − |z|2
so the hyperbolic metric is invariant under the stabilizer S 1 of the origin in
Aut(∆); it is also invariant under translation along a geodesic through z = 0,
since on H it is invariant z 7→ az; and these two subgroups generate (PSL2 (R) =
KAK).
19
Corollary 2.3 Any Riemann surface covered by the disk comes equipped with
a canonical metric of constant curvature −1.
Corollary 2.4 (Schwarz lemma for Riemann surfaces) Let f : X → Y
be a holomorphic map between hyperbolic Riemann surfaces. Then either:
• f is a locally isometric covering map, or
• kdf k < 1 everywhere, and thus d(f (x, f y) < d(x, y) for any pair of distinct
points x, y ∈ X.
b − {0, 1, ∞} is covered by the disk.
Theorem 2.5 The triply-punctured sphere C
Proof. Let T ⊂ H be the ideal triangle spanning 0, 1 and ∞, and let f : T → H
be the Riemann mapping normalized to fix 0, 1 and ∞. Using Schwarz reflection
through the sides of T in the domain and through the real axis in the range,
b − {0, 1, ∞}. Thus
we can analytically continue f to a covering map π : H → C
b
C − {0, 1, ∞} is isomorphic to H/Γ(2) (the orientation-preserving subgroup of
the group of reflections in the sides of T ).
Corollary 2.6 (Montel’s theorem) Any family of holomorphic functions omitb is normal.
ting 3 fixed values in C
Proof. Reduce to the case where F consists of all maps f : ∆ → C − {0, 1}.
Given a sequence fn ∈ F , pass to a subsequence such that fn (0) converges to
b If z = 0, 1 or ∞ then fn converges to a constant map by the Schwarz
z ∈ C.
lemma and completeness of the hyperbolic metric on C − {0, 1}. Otherwise we
can lift fn to the universal cover of C−{0, 1}, obtaining a sequence gn : (∆, 0) →
(∆, zn ), where zn → ze, a lift of z. Then gn has a convergent subsequence, so
fn = π ◦ gn does too.
Which Riemann surfaces are hyperbolic? It is known that the simplyb C, H, and the first two only cover C∗ , C/Λ
connected Riemann surfaces are C,
and themselves. All remaining surfaces are hyperbolic.
We will proof a special case:
Theorem 2.7 (Uniformization of planar domains) Any region X ⊂ C whose
complement contains 2 or more points is covered by the disk.
This includes the well-known:
Theorem 2.8 (Riemann mapping theorem) Any disk U ⊂ C, U 6= C is
conformally equivalent to the disk.
20
Proof of Theorem 2.7. We can arrange by an affine transformation that
e x
X ⊂ C − {0, 1}. Pick a basepoint x ∈ X, let (X,
e) be the universal cover of X,
and consider the family of maps
e x
F = {f : (X,
e) → (∆, 0) : f is a covering map to its image}.
To see F is nonempty, lift the inclusion X ⊂ C − {0, 1} to a map between the
e → ∆; the image is the covering space of X corresponding
universal covers, f : X
to the kernel of π1 (X) → π1 (C − {0, 1}), and f is a covering map to this image.
Now take a sequence fn ∈ F such that |fn′ (e
x)| tends to its supremum over
F . Since ∆ is bounded, fn is a normal family, and we can take a subsequence
fn → f . It is not hard to check that f ∈ F .
e → ∆ is surjective. Indeed, if the image omits a value z,
We claim f : X
then we can choose a proper degree two map B : (∆, 0) → (∆, 0) branched over
e
z. By the Schwarz lemma, |B ′ (0)| < 1; on the other hand, since z 6∈ f (X),
−1
e
the map B ◦ f admits a single-valued branched g : (X, x
e) → (∆, 0), we have
g ∈ F , and |g ′ (0)| > |f ′ (0)|, contrary to the construction of f .
Thus f is surjective; but since it is a covering map, it is an isomorphism.
Remark. To prevent cyclic reasoning, one should first prove the Riemann
b−
mapping theorem for simply-connected domains, then use it to uniformize C
{0, 1, ∞}, and finally extend the uniformization theorem to all planar domains
as above.
2.2
Extremal length
Let X be a Riemann surface. A Borel metric ρ on X is locally of the form
ρ(z)|dz| where ρ ≥ 0 is a Borel measurable function. If γ is a rectifiable path
on X, then its ρ-length is defined by
Z
ρ(z) |dz|.
ℓρ (γ) =
γ
Similarly the ρ-area of X is given by
Z
areaρ (X) =
X
ρ(z)2 |dz|2 .
Now let Γ be a collection of paths on X. Setting
ℓρ (Γ) = inf ℓρ (γ),
Γ
we define the extremal length of Γ by
λ(Γ) = sup
ρ
ℓρ (Γ)2
·
areaρ (X)
(2.1)
The supremum is take over all Borel metrics of finite area. Clearly λ(Γ) is a
conformal invariant of the pair (X, Γ).
21
Beurling’s criterion for an extremal metric. (See [Ah2, §4.7].) A metric
is extremal if it realizes the supremum in (2.1).
Theorem 2.9 Suppose the measure ρ2 on X lies in the closed convex hull of
the measures
{ρ|γ : γ ∈ Γ and ℓρ (γ) = ℓρ (Γ)}.
Then ρ is extremal for Γ.
Proof. Consider any other Borel metric α. We may assume both α and ρ are
normalized to give X area 1.
Now for any γ ∈ Γ we have
Z
Z
α = (α/ρ)ρ = hα/ρ, ρ|γi
ℓα (Γ) ≤
γ
γ
where the last expression is the pairing between functions and measures. Since
the probability measure ρ2 is a convex combination of the probability measures
(ρ|γ)/ℓρ (Γ), we have
ℓα (Γ)
≤ hα/ρ, ρ2 i =
ℓρ (Γ)
Z
X
αρ ≤
Z
α2
Z
ρ2
1/2
=1
by Cauchy-Schwarz. Thus ℓα (Γ) ≤ ℓρ (Γ), and therefore ρ maximizes the ratio
(2.1) of length-squared to area.
Examples.
1. A quadrilateral Q ⊂ C is a Jordan domain with 4 marked points on its
boundary, and a distinguished pair of opposite edges. We let Q∗ denote
the same quadrilateral with the other pair of edges distinguished.
Any quadrilateral is conformally equivalent to a unique Euclidean quadrilateral Q(a) = [0, a] × [0, 1], with the sides of unit length distinguished.
By definition, the modulus of Q is a.
Notice that mod(Q∗ ) = 1/ mod(Q).
Let Γ(Q) be the set of all paths joining the distinguished sides. Since the
Euclidean metric on Q(a) satisfies Beurling’s criterion (the geodesics are
horizontal segments), we find
λ(Γ(Q)) = mod(Q).
By considering any specific metric ρ on Q, we obtain lower bounds on
mod(Q) by considering λ(Γ(Q)) and λ(Γ(Q∗ )). Thus one has a powerful
method for estimating the modulus of a quadrilateral.
Example: let Q0 = [0, 1] × [0, 1] with the vertical sides distinguished; we
have mod(Q0 ) = 1. Now construct Q by adding a ‘roof’ to the house, i.e.
22
adding a right isosceles triangle of hypotenuse 1 to the top of the square.
Then ρ = |dz| on Q gives mod(Q) ≥ 2/3 (the area has increased to 3/2),
while ρ = |dz| restricted to Q0 gives mod(Q∗ ) ≥ 1. Thus
2/3 < mod(Q) < 1;
in particular, adding the roof brings the walls closer together.
2. An annulus. Any Riemann surface with π1 (X) = Z is isomorphic to C∗ ,
∆∗ or
A(R) = {z : 1 < |z| < R}
for a unique R. In the last case we define mod(X) = log(R)/(2π); and by
convention, mod(X) = ∞ in the first two cases.
Fixing R, let Γ be the family of ‘topological radii’, that is curves joining
the two boundary components of A(R). These curves are geodesics for the
cylindrical metric ρ = |dz|/|z|, which is extremal by Beurling’s criterion.
Thus
log(R)
λ(Γ) =
= mod(A(R)).
2π
Letting Γ∗ denote the family of simple essential loops in A(R), we find
λ(Γ∗ ) = 1/λ(Γ) = 1/ mod(A(R)).
Thus any metric ρ on an annular Riemann surface X yields upper and
lower bounds for mod(X), in terms of the ρ-area of X and the shortest
curves in Γ and Γ∗ .
3. The real projective plane. Let X = RP2 . Then X is canonically a Riemann
surface, in the sense that its universal cover S 2 has a unique conformal
structure, and this structure is preserved (up to orientation) by the deck
transformations of S 2 /X.
Let Γ be the family of all loops generating π1 (X) ∼
= Z/2. We claim
λ(Γ) = π/2.
To see this, let ρ be the round metric on X, making its universal cover S 2
into the sphere of radius 1. If we average linear measure on a great circle
over the rotation group of S 2 , we obtain an invariant measure which must
be the usual area form. Thus ρ satisfies Beurling’s criterion. The minimal
length of a curve joining antipodal points on S 2 is π, and the area of RP2
is 2π, so λ(Γ) = π 2 /(2π) = π/2.
4. Simple curves on a torus. Consider the torus X = C/Z ⊕ Zτ , Im τ > 0.
Let Γ be the family of loops on X in the homotopy class of [0, 1]. By
Beurling’s criterion, the flat metric |dz| on X is extremal. The area of X
is Im τ and the length of the geodesic [0, 1] is 1, so we find
λ(Γ) =
23
1
.
Im τ
Remark. For completeness we recall a direct proof that the quadrilaterals Q(a)
and Q(b) are conformally isomorphic iff a = b. Namely, given a conformal map
f : Q(a) → Q(b), one can develop f by Schwarz reflection through the sides of
Q(a) and Q(b) to obtain an automorphism F : C → C, which must be of the
form F (z) = αz + β. Since f fixes [0, 1]i, F is the identity.
A similar argument shows the annuli A(R) and A(S) are conformally isomorphic iff R = S.
2.3
Extremal length and quasiconformal mappings
Theorem 2.10 If Γ and Γ′ are related by a K-quasiconformal mapping, then
1
λ(Γ′ ) ≤ λ(Γ) ≤ Kλ(Γ′ ).
K
Proof. Let f : X → X ′ be a quasiconformal mapping sending Γ to Γ′ . For
each conformal metric ρ on the domain, we get a metric ρ′ = f∗ (ρ) on X ′
with the same lengths and areas as ρ; in particular, areaρ′ (X ′ ) = areaρ (X) and
ℓρ′ (Γ′ ) = ℓρ (Γ).
However ρ′ is generally not conformal. To make it conformal while we expand
its infinitesimal unit balls (which are ellipses of oblateness at most K) to round
balls. This does not decrease the ρ′ -length of Γ′ , and it increases the ρ′ -area of
X by at most K. Thus λ(Γ′ ) ≥ λ(Γ)/K, and the Theorem follows by symmetry.
Cf. [LV, §IV.3.3].
Corollary 2.11 If f : X → Y is a K-quasiconformal map, then mod f (Q) ≤
K mod Q for every quadrilateral Q on X.
In fact the converse is true: a map which distorts the modulus of every
quadrilateral by at most K is K-quasiconformal. The converse is clear for
linear maps, so it follows easily for smooth quasiconformal maps. The general
case depends on the a.e. differentiability of quasiconformal maps. Using this
fact, we have:
Theorem 2.12 Any homeomorphism f which is a uniform limit of K-quasiconformal
mappings is itself K-quasiconformal.
2.4
Aside: the Smale horseshoe
To study celestial mechanics, Poincaré investigated the Hamiltonian flow on
phase space corresponding to time evolution of the planets. Since the orbit of a
particular planet is approximately periodic, it is natural to take a transversal M
to the flow (e.g. the configurations of the sun-earth-moon system as the earth
passes through a window transverse to its orbit), and study the first return map
f : M → M.
24
The map f is volume-preserving. Indeed, the symplectic volume form Ω =
ω n on phase space is preserved by the Hamiltonian vector field v, as is v, and
thus the 2n − 1 form
α = iv (Ω)
is also preserved by the flow. Since α vanishes any hypersurface tangent to the
flow, the volume form α|M is f -invariant.
The existence of very complicated behavior in these dynamical systems was
known to Poincaré and Birkhoff.
Smale provided a simple picture, the horseshoe, that sums up in an immediate and geometric form a mechanism leading to infinitely many periodic cycles.
Namely a square S is stretched to a long, thin rectangle, then laced through
itself as in Figure 9. The thick edges of S map to the thick edges of f (S).
S
f(S)
Figure 9. The Smale horseshoe.
Within the two rectangles forming f (S) ∩ S, one finds a totally invariant
Cantor set E. The dynamics of f |E is conjugate to the action of Z on the shift
space (Z/2)Z of all functions φ : Z → Z/2.
Note that f can be realized as an area-preserving map. But by basic properties of extremal length, the modulus of f (S) (the extremal length of the paths
joining the thick sides) is greater than the modulus of S. Thus f cannot be
made conformal, and the horseshoe does not occur in conformal dynamics!
On the other hand, by flattening the horseshoe we obtain a 2-to-1 map
of an interval over itself, the critical point being the ‘bend’ in the horseshoe.
As the horseshoe is created (in a family of diffeomorphisms), the bend pushes
through the square, much as the critical point pushes through the interval.
Thus understanding the dynamics of fc (x) = x2 + c is a natural prerequisite
to understanding the bifurcations leading to a horseshoe, and one is back to
complex dynamics again.
2.5
The Ahlfors-Weill extension
b to
In this section we discuss the extension of conformal maps f : H → C
quasiconformal maps on the whole Riemann sphere. This extension is useful for
Teichmüller theory and holomorphic motions, as well as the theory of structural
stability for rational maps and Kleinian groups.
25
Norms. The natural Lp -norm on holomorphic quadratic differentials on a
hyperbolic Riemann surface X is given by
Z
1/p
|φ|
kφkp =
ρ2−2p |φ|p
,
kφk∞ = sup 2 ,
X ρ
X
where ρ = ρ(z) |dz| denotes the hyperbolic metric. Note that the L1 norm does
not involve ρ at all. Similarly for Beltrami differentials we have
Z
1/p
2
p
kµkp =
,
kµk∞ = sup |µ|.
ρ |µ|
X
X
A Beltrami differential µ on X is harmonic if µ = φ/ρ2 for some holomorphic
quadratic differential φ. This means that µ formally minimizes the L2 norm
among equivalent differentials µ + ∂v. Note that kµk∞ = kφk∞ .
b be a holomorphic map, and suppose kSf k∞ <
Theorem 2.13 Let f : H → C
1/2. Then there exists a unique extension of f to a quasiconformal map on the
whole Riemann sphere such that the dilatation µ of f on the lower halfplane is
a harmonic Beltrami differential. In fact we have µ(z) = −2y 2 φ(z).
Proof. Here is a quick construction of the map g on the lower halfplane extending f . Given w ∈ H, let Mw (z) be the unique Möbius transformation whose
2-jet at z = w matches the 2-jet of f (z) at z = w. Then set g(z) = Mz (z).
To verify that g has the required properties, it is useful to know how to
reconstruct f from its Schwarzian derivative φ = (f ′′ /f ′ )′ − (1/2)(f ′′ /f ′ )2 . To
do this, one can begin with two linearly independent solutions f1 , f2 to the
differential equation
y ′′ + (1/2)φy = 0.
After scaling one can assume the Wronskian f1 f2′ − f2 f1′ = 1. From these
solutions we obtain a map z 7→ (f1 (z), f2 (z)) from H into C2 . Projectivizing,
b given by f = f2 /f1 .
we obtain a map f : H → C
Because of our normalization of the Wronskian, this map satisfies
f′
f ′′
=
=
(f ′′ /f ′ ) = (log f ′ )′ = −2f1′ /f1 .
(f1 f2′ − f2 f1′ )/f12 = 1/f12 ,
−2f1′ /f13 , and
From this we find
Sf = −2(f1 f1′′ − (f1′ )2 )/f12 − 2(f1′ )2 /f12 = −2f1′′ /f12 = φ.
The choice of basis for the space of solutions of the different equation accounts
for the fact that Sf only determines f up to a fractional linear transformation.
Once we have f = f1 /f2 it is easy to see that
Mz (z + ǫ) =
f2 (z) + ǫf2′ (z)
·
f1 (z) + ǫf1′ (z)
26
(2.2)
To check this one simply examines the power series in ǫ for the expression above,
up to the term ǫ2 , and compares the terms to (f, f ′ , f ′′ ) computed above.
Thus the extension of f is given by
g(z) =
f2 (z) + ǫf2′ (z)
,
f1 (z) + ǫf1′ (z)
with ǫ = z − z = 2iy, if z = x + iy. To compute the Beltrami differential ∂g/∂g,
we first observe that both terms with involve the square of the denominator of
the expression above. As for the numerator, for ∂g it is simply
(f1 + ǫf1′ )f2′ − (f2 + ǫf2′ )f1′ = f1 f2′ − f2 f1′ = 1.
For ∂g we first note that:
∂(fi + ǫfi′ ) = fi′ + ǫfi′′ − fi′ = −(1/2)ǫφfi .
Thus its numerator is given by
(−1/2)ǫφ((f1 + ǫf1′ )f2 − (f2 + ǫf2′ )f1 ) = (1/2)ǫ2 φ.
So altogether the Beltrami differential of g is given by
µ(z) = −2y 2 φ(z).
Since φ(z) is a holomorphic quadratic differential, we have shown that µ is a
harmonic Beltrami differential.
Finally we verify uniqueness. Suppose we have another extension G to the
lower halfplane with µ(G) = −2ρ−2 ψ harmonic. Then G arises as the Ahlforsb with SF = ψ. By uniqueness
Weill extension of a univalent map F : H → C
of the solution to the Beltrami equation (up to a Möbius transformation), we
have F = f and thus ψ = φ, which implies g = G.
b is univalent if kSf k ≤ 1/2.
Corollary 2.14 A conformal immersion f : H → C
P∞
b −∆ =
Area theorem. Let f (z) = z + 1 bn z −n be a univalent map on C
{z : |z| > 1}. Then f sends the outside of the unit disk to the outside of a full,
compact set Kf ⊂ C of capacity one. One can compute the area of Kf directly
from the coefficients of f : namely we have
X
area(Kf ) = π(1 −
n|bn |2 ).
In particular we have:
Proposition 2.15 (Area theorem) If f (z) = z +
P
n|bn |2 ≤ 1.
Using the area theorem one can prove:
27
P
bn z −n is univalent, then
b is univalent, then kSf k ≤ 3/2.
Corollary 2.16 (Nehari) If f : H → C
Geometry of the Schwarzian derivative. The Schwarzian derivative can
also be interpreted as the rate of change of the osculating Möbius transformation
b
Mz , and as the curvature of a surface in H3 naturally associated to f : H → C.
See [Th], [Ep1], [Ep2].
Let π : H3 → H be the ‘nearest point’ projection, obtained by following the
b Then the Ahlfors-Weill map can be
normals to the hyperplane spanned by R.
further prolonged to a map
3
3
F :H →H
by F (p) = Mπ(p) (p). This map is a diffeomorphism and a quasi-isometry when
kSf k < 1/2.
b is a K-quasicircle with
On the other hand, it is easy to see that if Q ⊂ C
K near 1, then kSf k < 1/2 for the Riemann map to one side of Q. Thus
b for a canonical map of the
any ‘mild’ quasicircle can be realized as Q = F (R)
closed hyperbolic ball to itself (unique up to pre-composition with an isometry
b and preserving its orientation).
stabilizing R
3
Teichmüller theory via geometery
In this section we discuss Teichmüller space from the perspective of hyperbolic
geometry.
3.1
Teichmüller space
Let S be a closed, oriented surface of genus g ≥ 2. A marked hyperbolic surface
is a pair (φ, X) consisting of an oriented compact hyperbolic surface X ∼
= H/Γ
and an orientation-preserving homeomorphism φ : S → X.
Two marked surfaces (φi , Xi ), i = 1, 2 are equivalent if there exists an isometry α : X1 → X2 such that φ−1
2 ◦ α ◦ φ1 = ψ is isotopic to the identity.
The space of such equivalence classes is the Teichmüller space Tg = Teich(S).
For any essential closed loop α ⊂ S, there is a unique closed geodesic α ⊂ X
freely isotopic to φ(α). We denote its hyperbolic length by Lα (X). We give
Teichmüller space the weakest topology which makes all such length functions
continuous.
Representations. Since each surface in Teichmüller space is equipped with a
complete hyperbolic metric, from φ : S → X = H/Γ we obtain a homomorphism
ρ : π1 (S) → Γ ⊂ Isom+ (H) = PSL2 (R),
well-defined up to conjugacy. Thus Teichmüller space admits an embedding
Teich(S) ֒→ Hom(π1 (S), PSL2 (R))/(conjugation).
Since traces recover lengths, the topology induced by this embedding is the
same as that defined above.
28
Mapping-class group. We let Mod(S) denote the group of orientationpreserving homeomorphisms ψ : S → S, modulo those isotopic (equivalently,
homotopic) to the identity. It acts on Teich(S) by ψ · (φ, X) = (φ ◦ ψ −1 , X).
The quotient space is the moduli space
Mg = M(S) = Teich(S)/ Mod(S).
3.2
Fenchel-Nielsen coordinates
Theorem 3.1 The Teichmüller space Teich(S) is homeomorphic to a ball B n ,
and n = dimR Q(X) for any X ∈ Teich(S).
Proof. (Fenchel-Nielsen) Suppose S is a closed surface of genus g ≥ 2. Then
S can be decomposed along 3g − 3 simple closed curves into pairs of pants. For
any X ∈ Teich(S), these curves are canonically represented by geodesics, whose
lengths determine each pair of pants up to isometry. To recover X in addition we
need a twist parameter when gluing pants together. Thus altogether Teich(S)
3g−3
is parameterized by R+
× R3g−3 , and 6g − 6 = dim Q(X).
The case of surfaces with boundary or of smaller genus is similar.
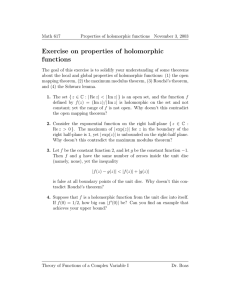
Figure 10. Tiling by (2, 3, 7) triangles
Construction of pants and triangles. Note that the construction of a pair
of pants with cuffs of length 2Li , i = 1, 2, 3 is tantamount to the construction
of three disjoint geodesics in H2 with d(γi , γi+1 ) = Li+2 . Now an (oriented)
geodesic, in the Minkowski model R2,1 , corresponds to a vector with v 2 = 1,
and the oriented distance between two them satisfies − cosh d(γ1 , γ2 ) = hv1 , v2 i.
Thus our pair of pants corresponds to a basis for R2,1 with the quadratic form
1
− cosh L3 − cosh L2
B = − cosh L3
1
− cosh L1 ·
− cosh L2
− cosh L1
1
It is readily verified that B has signature (2, 1), for all choices of (Li ); this shows
such a configuration exists and is unique up to isometry.
29
Similarly, to construct an (α, β, γ) triangle, one can use the form
1
− cos γ − cos β
B = − cos γ
1
− cos α ·
− cos β
− cos α
1
Note that
det B = 1 − 2 cos α cos β cos γ + cos2 α + cos2 β + cos2 γ = 0
iff S = α + β + γ = π. If S < π then B has signature (2, 1), while if S > π then
it has signature (3, 0). (Consider the extreme cases where all angles are 0 or all
are π/2. Note that when all angles go to π the determinant goes to 0, since the
vertices become colinear on the sphere.)
As another example, suppose we wish to construct (2, p, q) triangle in H2 ∼
=
∆. We can arrange that the x and y axes form two of the sides, i.e v1 = e1
and v2 = e2 in R2,1 . Then the third side is a circle centered at (x/z, y/z) in C,
where v3 = (x, y, z) satisfies v32 = x2 + y 2 − z 2 = 1 and hv3 , e1 i = x = cos π/p,
hv3 , e2 i = y = cos π/q. This allows one to easily locate the center; moreover,
the radius satisfies 1/r2 = z 2 = x2 + y 2 − 1.
The case of a (2, 3, 7) triangle is shown in Figure 10.
Trivalent graphs. We remark that up to homeomorphism, there are only
finitely many decomposition of a surface of genus g into pairs of pants, and
these decompositions correspond to trivalent graphs with g loops (first Betti
number g).
Figure 11. The trivalent graphs of genus 2 and 3.
Limits of pants. Interesting geometric limits can arise as the lengths (L1 , L2 , L3 )
of the cuffs of a pair of pants P tend to infinity. There are 3 basic cases:
(0, 0, ∞): P splits into a pair of punctured monogons. (∞, ∞, ∞): P collapses
(after rescaling) to a trivalent graph, or (before rescaling) to a pair of ideal
triangles. (0, ∞, ∞): P collapses to a punctured bigon, which has a nontrivial
modulus (it is bounded by a pair of geodesics from 1 to τ ∈ S 1 in ∆∗ ).
Symplectic structure. Fixing a pair of pants decomposition P of Σg , we obtain twist and length coordinates (ℓi , τi ) for Tg . (Note that the twist parameter
30
is measured in units of length, not angle.) In these coordinates, a Dehn twist
around the ith element of P acts by τi 7→ τi + ℓi . An important result is that
the symplectic form
X
dℓi ∧ dτi
ω=
i
is invariant under the full mapping-class group. It coincides with the symplectic form on twisted cohomology coming from the intersection pairing on
H 1 (Σ, sl2 (R)ρ ).
Case of genus one. In the case of a torus, normalize to have total area 1, we
have just 2 coordinates ℓ and τ , giving the lattice Z(ℓ, 0) ⊕ Z(τ, 1/ℓ). In terms
of τ = x + iy ∈ H, this lattice has coordinates (x, y) = (τ /ℓ, 1/ℓ2 ). We then find
that dℓdτ is a constant multiple of the hyperbolic area form dxdy/y 2 .
Characteristic classes. It is known that the Weil-Petersson symplectic form
has the property that [ω/π 2 ] generates H 2 (Mg , Q). Consequently the WeilPetersson volume of moduli space is a rational multiple of π 6g−6 [Wol1]. It
can also be shown that [ω/2π 2 ] = κ1 as a class in H 2 (Mg , Q), where κ1 =
π∗ (c1 (V )2 ) is the pushfoward of the square of first Chern class of the relative
tangent bundle to the universal curve π : C g → Mg ; see [Wol2].
3.3
Geodesic currents
Reference: [Bon].
The circle at infinity. Fix g ≥ 2 and let X, Y ∈ Tg be a pair of marked
hyperbolic surfaces. Then there is a unique homotopy class of homeomorphism
f : X → Y compatible with markings.
Theorem 3.2 The lift fe : H → H of f to the universal covers of X and Y ex1
tends to a homeomorphism of S∞
. This extension depends only on the homotopy
class of f .
Thus the circles at infinity for all points in Tg are canonically identified. This
circle, together with an action of π1 (Zg ) on it, can be constructed topologically
by taking the metric completion of a conformal rescaling of the word metric on
π1 (Zg ).
For concreteness, we fix a particular X = H/Γ in Tg , but observe that the
topological dynamics of (Γ, S 1 ) is independent of X.
Theorem 3.3 Γ has dense orbits on S 1 × S 1 .
Proof. By ergodicity, there exists a dense geodesic γ in T1 X. Thus there
exists a geodesic e
γ in H, with endpoints (a, b), whose Γ-orbit is dense in T1 (H).
Consequently Γ · (a, b) is dense in S 1 × S 1 .
31
On the other hand, ‘periodic orbits’ are also dense:
Theorem 3.4 The closed geodesics on X correspond to a dense subset of S 1 ×
S1.
The space of currents. Let G = (S 1 × S 1 − ∆)/(Z/2) denote the Möbius
band forming the space of unoriented geodesics in H. Then G/Γ is the space
of geodesics on X. (Since Γ has a dense orbit in G, this is a ‘quantum space’
in the sense of Connes; nevertheless it carries many interesting closed sets and
measures.)
A geodesic current is a locally finite, Γ-invariant measure µ on G. We require
that µ 6= 0. The space of all geodesic currents on X will be denoted C(X).
Examples of currents. (i) An unoriented closed geodesic γ ⊂ X gives a point
pγ ∈ G such that Γ · p is discrete. Thus we can form an invariant measure by
putting a δ mass on each point in its orbit. This is the current [γ] associated to
a closed loop.
P
Ci γi determines a current
P (ii) A positive weighted sum of closed curves
Ci [γi ].
For simplicity we suppressed the brackets in the future.
Integral geometry. The integral geometric measure on G is defined as follows.
Fix an oriented geodesic γ ⊂ H. Then there is an injective map γ × S 1 → G
sending (x, θ) to the unique unoriented geodesic δ(x, θ) through x making angle
θ with γ. (Since the geodesics are unoriented, θ ranges in [0, π].) The measure
µ = (1/2) sin θdθ dx
can be shown to be independent of the choice of chart. It is characterized by
the following property.
Theorem 3.5 For any geodesic segment S ⊂ H, the measure of the set of
geodesics γ ∈ G meeting S is equal to ℓ(S).
Proof. We have
Rπ
0
(1/2) sin θ dθ = 1.
Clearly µ is invariant under all isometries of H, so it defines an element
LX ∈ C(X). This Liouville current depends very much on X; in fact, as we will
see below, the natural identification C(X) = C(Y ) sends LX to LY iff X = Y in
Tg .
Constructing T1 (X). Now let ∆ ⊂ G × S 1 be the set of pairs (γ, p) where p
is an endpoint of γ. Then we have a natural isomorphism
(G × S 1 − ∆) ∼
= T1 (H).
Indeed, the orthogonal projection of p to γ determines a point x ∈ H, and there
is a unique unit vector v ∈ Tx (H) tangent to γ, oriented so that p lies to the
right. The foliation of T1 (H) by geodesics is obtained simply by varying the S 1
factor p in this product. Taking the quotient by Γ, we find:
32
Theorem 3.6 The topological space T1 (X) and its foliation by geodesics can be
reconstructed from the action of Γ on S 1 .
Tg .
In particular, this foliated 3-manifold does not depend on the choice of X ∈
Theorem 3.7 The space of currents C(X) is isomorphic to the space of invariant measures for the geodesic flow on T1 (X) that are also invariant under time
reversal.
Proof. The lift of an invariant measure to T1 (H) gives a measure on G ×S 1 that
is locally of the form µ × ds for length measure along geodesics. By invariance
under Γ, µ is a geodesic current. Conversely, the product of a geodesic current
with length measure gives an invariant measure for the geodesic flow.
Remark. The geodesic flow cannot be reconstructed from the topological
action of Γ on S 1 , since its time parameterization determines the lengths of
closed geodesics.
Intersection number. Let I ⊂ G × G be the set of pairs of geodesics (α, β)
that cross one another. Note that we can identify I with the bundle I1 (H)
whose fiber over x ∈ H consists of ordered pairs (±v, ±w) of unoriented, linearly
independent unit vectors.
Similarly, we have I/Γ = I1 (X). We define the intersection number i(α, β)
of a pair of geodesic currents to be the total measure of I1 (X) with respect to
the measure α × β.
Theorem 3.8 If α, β are closed geodesics on X, then i(α, β) is the number of
transverse intersections of α and β.
Theorem 3.9 We have i(α, LX ) = ℓα (X).
Proof. We have a natural projection I1 (X) → P1 (X) = T1 (X)/(±1) by
(±v, ±w) 7→ (±v). By the characteristic property of the integral geometry
measure, the pushforward of α × LX to P1 (X) gives the product of α with
length measure along geodesics; i.e. it gives the measure invariant under the
geodesic flow corresponding to α. The total mass of this measure is then just
the length of α.
Remark. The proof shows that i(α, LX ) is simply the total mass of the corresponding measure on P1 (X) invariant under the geodesic flow.
Theorem 3.10 We have i(LX , LX ) = π 2 |χ(X)|.
Proof. As above, the pushforward of LX ×LX to P1 (X) is the invariant measure
µ for the geodesic flow attached to LX . We wish to relate this measure to the
33
usual Liouville measure dx dy dθ. Since the computation is at a small scale, it
suffices to work in Euclidean space.
Thus we let LX be the measure on the space of unoriented lines in R2 given
by the 2-form
ω = (1/2) sin θ dθ du.
Here the line L(θ, u) passes through (u, 0) and has slope θ ∈ [0, π]. Letting
(θ, x, y) denote coordinates on P1 (R2 ), we have
tan θ = y/(x − u),
and thus u = x − y/ tan θ. Using the fact that dθ already appears in ω, we then
have
ω = (1/2) sin θ dθ(dx − dy/ tan θ) = (1/2)d θ(sin θ dx − cos θ dy)
as a form pulled back to P1 (R2 ). Since the form α = cos θ dx + sin θ dy restricts
to arclength along any geodesic in P1 (R), we find:
µ = ω ∧ α = (1/2)d θ(sin2 θ + cos2 θ) dx dy = (1/2)dx dy dθ.
Consequently i(LX , LX ) is one-half the volume of P1 (X) with respect to the
standard measure. The standard measure has total volume = π area(X) =
2π 2 |χ(X)|, completing the proof.
Topology of C(X). The space C(X) is equipped with the weak topology. That
is, we have µn → µ as measures on G × G if and only if
Z
Z
φµn → φµ
for every φ ∈ C0 (G × G).
Using the fact that closed curves are dense in G, it is straightforward to
show:
Theorem 3.11 The set of weighted closed curves is dense in C(X).
The next result is a little more subtle, since I is an open set. It depends on
the fact that pairs of geodesics near ∂I are nearly parallel.
Theorem 3.12 The intersection number i : C(X) × C(X) → R is continuous.
Corollary 3.13 A map f : S → C(X) is continuous iff i(f (s), α) is continuous
for every closed curve α.
Corollary 3.14 The map Tg → C(X) given by Y 7→ LY is a proper homeomorphism to its image.
Proof. We can find a finite set of simple closed curves whose lengths determine
Fenchel-Nielsen coordinates for Y .
34
Compactness. We say a current α binds X if every
P geodesic on X crosses a
geodesic in the support of α. For example, if α = Ci αi is
S a weighted sum of
closed curves with Ci > 0, and if every component of X − αi is a topological
disk, then α binds X. Similarly, LX binds X.
Theorem 3.15 If α binds X, then for any M > 0 the set
K = {β : i(α, β) ≤ M } ⊂ C(X)
is compact.
Proof. It suffices to show that every p ∈ G has a neighborhood U such that
β(U ) ≤ CU for all β ∈ K. Given p, pick q ∈ supp α such that (p, q) ∈ I. Since
I is open, we can find a neighborhood U × V of (p, q) within it. Then for all
β ∈ K, we have
β(U )α(V ) ≤ i(α, β) ≤ M,
and thus β(U ) ≤ M/α(V ) = cU .
Corollary 3.16 Let (αi )N
1 be a set of closed curves that bind X. Then the set
of points Y ∈ Tg such that ℓY (αi ) ≤ M is compact.
Random geodesics. Putting these results together, we see that any point
in Teichmüller space can be specified by a sequence of weighted simple closed
curves Cn γn → LX . These curves can be constructed by choosing a random
vector in T1 (X) and closing longer and longer segments of the resulting geodesic.
Thus one sometimes refers to LX as a ‘random geodesic’ on X. This is made
more precise by the following result.
Theorem 3.17 For suitable closed geodesics γn , we have
LX (δ) =
i(γn , δ)
π
area(X) lim
·
2
LX (γn )
(3.1)
Proof. Choose γn such that Cn γn → LX ; then we have LX (δ) = lim Cn i(γn , δ)
and the equation
i(Cn γn , LX ) = Cn LX (γn ) → i(LX , LX ) = π 2 |χ(X)| = (π/2) area(X)
gives the behavior of the constants Cn .
Alternatively, for small r one can consider the locus Ur ⊂ T1 (X) of tangents
to segments of length 2r centered on points of δ. Then the angular measure of
Ur through a point p at distance t from δ is given by 4 cos−1 (t/r) (which tends
to 2π as t → 0). Thus
Z r
m(Ur ) ∼ LX (δ)
4 cos−1 (|t|/r) dt = 8rLX (δ).
−r
35
Now a random geodesic γn will meet Ur in i(γn , δ) segments, each of length 2r;
hence we have:
ℓ(γn ∩ Ur )
2ri(γn , δ)
m(Ur )
8rLX (δ)
=
→
=
.
ℓ(γn )
LX (γn )
m(T1 (X))
2π area(X)
This shows:
i(γn , δ) ∼
2LX (γn )LX (δ)
,
π area(X)
which also gives (3.1).
Laminations. A geodesic lamination λ ⊂ X is a closed set that is a union
of simple geodesics. Through each point of λ there passes a unique complete
simple geodesic contained in λ. (One might regard the foliation of λ by simple
geodesics as part of the structure of the lamination; for surfaces of finite volume
this structure is redundant, but for surfaces of infinite volume (such as H itself)
it is not.)
A transverse measure µ for λ is an assignment of a positive measure to each
transversal τ to λ, supported on τ ∩λ and invariant under homotopy. A measured
lamination is a geodesic lamination equipped with a transverse measure of full
support.
We say α ∈ C(X) is a measured lamination if i(α, α) = 0. This condition
implies that the set of geodesics in the support of α form a geodesic lamination
λ, and that α yields a transverse invariant measure of full support. The converse
also holds, and thus:
Theorem 3.18 The set ML(X) of measured geodesic laminations can be identified with the space of currents such that i(α, α) = 0.
Examples of laminations. The simplest example of a measured lamination
is a simple closed curve α.
For a more interesting example, let F be an irrational measured foliation of
a torus T . Cut T open along a single leaf, and insert a bigon. The result is a
punctured torus X with a measure lamination λ whose transversals are Cantor
sets.
This example can be compared to the construction of the Cantor set by
cutting the interval [0, 1] open at every dyadic rational p/2n , and inserting an
interval of length 3−n .
Theorem 3.19 (Nielsen) Any geodesic lamination of a surface of finite volume has measure zero.
Proof. Apply Gauss-Bonnet to the surface obtained by doubling X − λ across
its boundary.
36
Compactification. Let PC(X) = C(X)/R+ with the quotient topology.
Theorem 3.20 The projective space PC(X) is compact.
Proof. Any sequence of projective currents [αn ] lifts to a sequence normalized
to that ℓX (αn ) = 1, and these currents form a compact set by Theorem 3.15.
Theorem 3.21 The Teichmüller space Tg embeds into PC(X), and the union
Tg ∪ PML(X)
is compact.
Proof. Embedding is immediate because i(LY , LY ) is constant for all Y ∈ Tg .
Now suppose Yn → ∞ in Tg . Then there exists a simple closed curve α such
that i(α, LYn ) → ∞. Consequently LYn goes to infinity in the space of currents.
Thus if we rescale LYn so it remains in a compact set, its self-intersection number
tends to zero and any limit is a measured lamination.
Pinching. As an example, let (ℓi , τi )13g−3 be Fenchel-Nielsen coordinates associated to a pair-of-pants decomposition (αi ) of Zg . Set τi = 0 and consider
the surfaces Yn = Y (ℓni ) where ℓni ≤ 1 and ℓni → 0 for some i. Each corresponding geodesic γin on Yn is enclosed in a standard collar neighborhood of
width approximately log(1/ℓni ). Passing to a subsequence, wePcan assume that
[log(1/ℓni )] → [wi ] in the projective space P(Rn ). Then Yn → wi αi ∈ PMLg ,
because
X
ℓβ (Yn ) =
log(1/ℓni )i(β, αi ) + Oβ (1)
for every closed geodesic β on Yn .
This shows every weight sum of disjoint simple closed curves actually occurs
in ∂Tg . We will soon see these sums are dense in PMLg , and thus PMLg = ∂Tg .
Twisting. Similarly, let ψ ∈ Modg be a product
ψ = TCnii of Dehn twists about
P
disjoint simple closed curves, and let λ =
|ni |Ci . Then ψ n (X) → [λ] for all
X ∈ Tg .
As Bers once put it: there are two ways to send a Riemann surface to infinity
in Teichmüller space: by pinching it, and by wringing its neck.
3.4
Laminations
The space MLg turns out to be a rather concrete space: it is a finite-dimensional
manifold, homeomorphic to a R6g−6 , with combinatorial charts that depend only
on the topology of Zg .
Example: braids and simple closed curves. To motivate our approach
to MLg , and more generally to MLg,n , we consider a particular sequence of
simple closed curves on the 4-times punctured sphere.
37
Let X = C − {−1, 0, 1}. Choosing a marking, we can consider X as an
element of the Teichmüller space M0,4 .
Let A, B be simple closed curves on X, represented by round circles, such
that A encloses {−1, 0} and B encloses {0, 1}. Let α, β ∈ Mod(X) be given by
the left Dehn twist on A and a right Dehn twist on B. Note that α and β are
conjugate under the reflection ρ(x + iy) = −x + iy.
We now wish to examine the simple closed curves given by
(C0 , C1 , C2 , C3 , . . .) = (A, β(A), αβ(A), βαβ(A), . . .).
These curves can be visualized by enclosing the top two strands of an alternating,
3-stranded braid in a rubber band, and then pushing the band downwards, one
crossing at a time. See Figure 12.
By the time one has drawn C4 , it has become evident that (although they are
very long) these curvesi consist mainly of many parallel strands, joined together
in a simple branching pattern.
The branching pattern for the curves with odd indices is the train track τ
shown in Figure 13. Any collection of non-negative integral weights (a, x, b, y, c)
on the edges of τ , satisfying the switching conditions
a = b + x, a + x = c + y, b + c = y
at its vertices, determines a simple closed curve C(a, x, b, y, c) carried by τ . To
construct C(a, x, b, y, c), replace each edge of τ by a number of parallel strands
determined by its weight, and join them without crossing at the vertices.
For simplicity, we eliminate the weights x and y (since they are determined
by the switching conditions); we then have a curve C(a, b, c) defined by integers satisfying a = b + c. In this notation, C0 = C(1, 1, 0), C2 = (2, 1, 1) and
C4 = (5, 2, 3), and in fact all the curves C2i are carried by τ . The weights (a, b, c)
are simply the number of strands crossing (−∞, −1), (0, −i∞) and (1, ∞) respectively.
The curves C2i+1 are similarly carried by the train track τ ′ = ρ(τ ). Using
the same crossing numbers, we then have simple closed curves C ′ (a, b, c) carried
by τ ′ . On τ ′ the weight relation becomes c = a + b.
It is now easy to check:
Theorem 3.22 We have β(C(a, b, c)) = C ′ (a, c, b + 2c) and α(C ′ (a, b, c)) =
C(b + 2a, a, c).
Since the weight transformations are linear, it is easy to compute that the
action of ψ = αβ is given by ψ(C(a, b, c)) = C(2a+c, a, b+2c). We can eliminate
b = a − c and obtain
! !!
2 1
a
ψ(C(a, c)) = C(2a + c, a + c) = C
.
1 1
c
Starting with C0 = C(1, 0) = C(f1 , f0 ), we then find C2i = (f2i+1 , f2i ), where
(f0 , f1 , f2 , f3 , . . .) = (0, 1, 1, 2, 3, 5, 8, . . .) are the Fibonacci numbers.
38
Figure 12. Simple closed curves C0 , C1 , C2 , C3 , C4 .
39
y
a
x
c
b
Figure 13. A train track for C2i .
√
It is well-known that fn+1 /fn → γ = (1 + 5)/2 (the golden ratio). Thus
[C2i ] converges, in the space PML, to the projective measured lamination
[C(γ, 1)] = [λ]. Moreover, this measured lamination satisfies ψ(λ) = γ · λ.
Note that [λ] is not transversally orientable! Thus it does not represent a
cohomology class on X.
We now proceed to a more formal discussion.
Train tracks. A train track τ ⊂ X is a finite 1-complex such that
(i) every x ∈ τ lies in the interior of a smooth arc embedded in τ ,
(ii) any two such arcs are tangent at x, and
(iii) for each component U of X − τ , the double of U along the smooth part
of ∂U has negative Euler characteristic.
Example. The complementary regions of our train track τ are all punctured
monogons. The double of such a surface is a triply-punctured sphere.
The vertices (or switches) of a train track, V ⊂ τ , are the points where 3
or more smooth arcs come together. The edges E of τ are the components of
τ − V ; some ‘edges’ may be closed loops.
The module of a train track. Let T (τ ) denote the Z-module generated by
the edges E of τ , modulo the relations
[e1 ] + · · · + [er ] = [e′1 ] + · · · + [e′s ]
for each vertex v ∈ V with incoming edges (ei ) and outgoing edges (e′j ). (The
distinction between incoming and outgoing edges depends on the choice a direction along τ at v.) Since there is one relation for each vertex, we obtain a
presentation for T (τ ) of the form:
D
ZV −→ ZE → T (τ ) → 0.
(3.2)
The space of 1-cycles on τ with values in B is defined by
Z1 (τ, B) = Hom(T (τ ), B).
Laminations A geodesic lamination λ is carried by a train track τ if there is a
continuous collapsing map f : λ → τ such that for each leaf λ0 ⊂ λ,
40
(i) f |λ0 is an immersion, and
(ii) λ0 is the geodesic representative of the path or loop f : λ0 → X.
Collapsing maps between train tracks are defined similarly.
Theorem 3.23 Every geodesic lamination is carried by some train track.
See [HP, 1.6.5].
A collapsing map λ → τ sends transverse measures on λ to elements of
Z1 (τ, R+ ).
Theorem 3.24 The set of measured laminations carried by τ corresponds to
the set of positive 1-cycles Z1 (τ, R+ ).
The set of systems of simple closed curves with rational weights carried by τ
corresponds to Z 1 (τ, Q+ ).
Corollary 3.25 Weighted systems of simple closed curves are dense in ML(X).
Corollary 3.26 The closure of Tg is all of PML(X).
Using train tracks as charts, one finds:
Theorem 3.27 The space ML(X) is a PL-manifold of dimension 6g − 6.
For example, if we take 3g − 3 curves forming a pair of pants decomposition
of Σg (with 2g − 2 pants), then add 3 more arcs to each pair of pants to obtain
a train track, then the original curves give 4(3g − 3) = 12g − 12 edges, the new
arcs give 3(2g − 2) = 6g − 6 more edges; and each of the original curves now
carries 4 vertices, so we get |E| = 18 − 18, |V | = 4(3g − 3) = 12g − 12, and the
difference is 6g − 6.
With more work (using e.g. the classification of surface diffeomorphisms),
one can show more precisely:
Theorem 3.28 The space PML(X) is homeomorphic to a sphere of dimension
6g − 7.
Example. Using our train track τ , one sees that PML0,4 is a compact 1manifold, hence a circle. It is instructive to find a finite collection of train
tracks whose charts cover PML0,4 .
3.5
Symplectic geometry of Teichmüller space
Hamiltonian formalism. Recall that a symplectic manifold (M 2n , ω) is a
smooth manifold equipped withPa closed 2-form such that ω n 6= 0. A typical
example is Cn ∼
= R2n with ω = dxi ∧ dyi .
41
Any smooth function H : M → R determines a Hamiltonian vector field XH ,
characterized by ω(XH , Y ) = dH(Y ). The flow generated by XH preserves both
ω and H; for example,
LX (ω) = diX (ω) + iX d(ω) = d(dH) + iX (0) = 0.
Fenchel-Nielsen coordinates. Recall that any pair of pants decomposition of
Zg , determined by simple closed curves α1 , . . . , α3g−3 , gives a coordinate system
(τi , ℓi ) for Tg .
We emphasize that τi , like ℓi , has units of length, and that the vector field
∂/∂τi represents a right twist along the corresponding simple closed curve.
P
Theorem 3.29 The symplectic form ω =
dℓi ∧ dτi is independent of the
choice of coordinate system.
Kähler form. This symplectic form has many other manifestations; for example, when coupled to the complex structure
R it yields the Weil-Petersson metric,
given on the cotangent space by kφk22 = X |φ|2 /ρ2 .
In the case of H = T1,1 , we have τ ∼ x/y and ℓ ∼ 1/y, and thus ω = dℓ∧dτ ∼
dxdy/y 3 as y → ∞. Thus the Weil-Petersson metric is approximately |dz|/y 3/2 ,
the distance to the cusp is finite and hence M1 has finite Weil-Petersson diameter.
In particular, the Weil-Petersson metric is not equivalent to the Bergman
metric, since the latter is complete and in fact comparable to the Teichmüller
metric [Ha].
Earthquakes. For simple closed curves we have:
Corollary 3.30 The Fenchel-Nielsen twist −∂/∂τi is the Hamiltonian vector
field generated by the length function ℓi (X).
Based on this observation, for any λ ∈ MLg we define the twist deformation
twλ : Tg → Tg as the unit-time diffeomorphism generated by the Hamiltonian
vector field −XH , where H(X) = ℓλ (X). The result is a right earthquake along
the lamination λ.
Theorem 3.31 Any two points in Teichmüller space are connected by a unique
right earthquake.
Convexity of lengths. Given simple closed curves α and β, and p ∈ α ∩ β,
let θp ∈ [0, π] denote the angle through which β must be rotated to line up with
α. This angle changes to π − θp if the roles of α and β are reversed.
Theorem 3.32 For any pair of laminations α, β the right twist along β satisfies
X
d
ℓα (twtβ )(X) =
cos(θp ).
dt
p∈α∩β
42
Corollary 3.33 Geodesic lengths are convex along earthquake paths, and strictly
so if α meets β.
Proof. It is also easy to see that θp is decreasing under the earthquake flow
along β, and thus
X
d2
dθp
ℓα (twtβ )(X) =
> 0.
− sin(θp )
2
dt
dt
p∈α∩β
Following [Ker], we then have:
Theorem 3.34 (Nielsen realization conjecture) Any finite subgroup G ⊂
Modg can be lifted to a finite subgroup of Diff(Zg ).
Equivalently, any finite subgroup G of Modg has a fixed-point in Tg .
P
Proof. Pick a closed curves α that binds Zg , and let β = G g · α ∈ C(Zg ).
Then ℓβ (X) is a proper function on Teichmüller space, so it achieves its minimum at some point X0 . If the minimum is also achieved at X1 , then X0 = X1
because ℓβ (Xt ) is strictly convex along the earthquake path from X0 to X1 .
Since ℓβ (g · X) = ℓβ (X), we have g · X0 = X0 for all g ∈ G.
Invariant measure for the Teichmüller geodesic flow. We remark that
there is a parallel discusion for the Teichmüller geodesic flow, in which S 1 × S 1
is replaced by PML.
These is a natural Modg,n invariant measure on ML which is analogous to
the SL2 (Z)-invariant measure dx dy on R2 . From this we can obtain a formula
for the invariant measure on PML × PML.
Theorem 3.35 The Modg -invariant measure on PML × PML is given locally
by
(X0 Y0 )d dx dy
·
µ=
i(X, Y )d
Here (X0 , . . . , Xd−1 ) and (Y0 , . . . , Yd−1 ) are local coordinates on ML in the
GLd (Z) charts given e.g. by periods or train tracks. So in these coordinates,
dX dY is a Modg,n -invariant measure on ML × ML. But it is not invariant
under the action of A = R+ × R+ given by (X, Y ) 7→ (αX, βY ). To achieve
this, we divide by i(X, Y )d .
Coordinates on PML are given by (x, y) where xi = Xi /X0 , i = 1, . . . , d − 1
and similarly for y. To get the invariant measure f (x, y) dx dy, we choose a
2-form ω on ML × ML which restricts to Haar measure on each A-orbit; for
example,
dX0 dY0
ω=
·
X0 Y0
43
We then solve the equation
dX dY
= f (x, y) dx dy ω.
i(X, Y )
We find
dx dy ω =
dX dY
,
(X0 Y0 )d
which gives the desired formula for f .
Note that f (x, y) = (X0 Y0 )d /i(X, Y )d is homogeneous in (X, Y ), so it only
depends on (x, y).
Example: For (g, n) = (1, 0) we get
f (x, y) =
4
X0 Y0
X0 Y1 − X1 Y0
2
=
1
·
(y1 − x1 )2
Teichmüller theory via complex analysis
This section provides an introduction to the complex analytic theory of Teichmüller space. It centers around the geometric meaning of the Teichmüller
metric.
Basic references for Teichmüller theory include [Ga], [IT] and [Nag].
4.1
Teichmüller space
Definitions. A Riemann surface X is of finite type (g, n) if X = X − E for
some compact Riemann surface X of genus g and finite set E with |E| = n.
Each end of X is isomorphic to a punctured disk.
Let S be a compact connected oriented surface. and let X be a Riemann
surface of finite type homeomorphic to int(S). A marking of X by S is an
orientation-preserving homeomorphism
f : int(S) → X.
The Teichmüller metric on Riemann surfaces marked by S is defined by
d((f, X), (g, Y )) =
1
inf{log K(h) : h : X → Y is homotopic to g ◦ f −1 }.
2
Here h ranges over all quasiconformal maps respecting markings, and
K(h) = sup
X
|hz | + |hz |
≥1
|hz | − |hz |
is its dilatation.
For any two Riemann surfaces X, Y marked by S, the compactifications X
and Y are diffeomorphic. Thus their exists a quasiconformal map f : X → Y
44
respecting markings, and therefore the Teichmüller distance between X and Y
is finite.
The Teichmüller space Teich(S) is obtained from the space of all marked
Riemann surfaces (f, X) by identifying those at distance zero. Equivalently,
two marked surfaces (f1 , X1 ) and (f2 , X2 ) define the same point in Teich(S) if
there is a conformal map h : X1 → X2 homotopic to f2 ◦ f1−1 .
The mapping class group Mod(S) consists of all homotopy classes of orientationpreserving homeomorphisms h : S → S. (In fact homotopy and isotopy define
the same equivalence relation here.) There is a natural action of Mod(S) on
Teich(S) by
h · (f, X) = (f ◦ h−1 , X).
This action is an isometry for the Teichmüller metric. (In fancier language, the
map S 7→ Teich(S) is a functor from the category of surfaces and isotopy classes
of homeomorphisms, to the category of metric spaces and isometries.)
The notation Tg,n is often used for the Teichmüller space of Riemann surfaces
of genus g with n punctures.
4.2
The Teichmüller space of a torus
Theorem 4.1 The Teichmüller space of a torus S is naturally isometric to
H, with the conformal metric 21 |dz|/ Im(z) of constant curvature −4, and with
Mod(S) ∼
= SL2 (Z) acting by Möbius transformations.
Proof. A marked torus f : S → X = C/Λ determines a homomorphism
f∗ : π1 (S) → Λ. Choosing oriented generators ha, bi for π1 (S) ∼
= Z ⊕ Z, we can
normalize by scaling in C so that f∗ (a, b) = (1, τ ) with τ ∈ H. This gives the
desired map Teich(S) ∼
= H.
To see the Teichmüller metric dT is half the hyperbolic metric dH , first
note that the natural real affine map f : X1 → X2 , between a pair of tori Xi =
C/(Z⊕Zτi ), has dilatation log K(f ) = dH (τ1 , τ2 ). This is particularly clear when
τi = iyi , since then f (x, y) = (x, y2 y/y1 ) has log K(f ) = | log(y2 ) − log(y1 )|.
Therefore
dT (τ1 , τ2 ) ≤ dH (τ1 , τ2 )/2.
To see f is extremal, we look at the distortion of extremal length. Letting
Γ(1, 0) denote the family of loops on S in the isotopy class (1, 0) ∈ π1 (S), we
have seen that
1
λ(Γ(1, 0), C/(Z ⊕ τ Z)) =
.
Im τ
Since extremal length is distorted by at most the factor K(f ), we have
dT (τ1 , τ2 ) ≥
1
| log Im(τ1 ) − log Im(τ2 )|.
2
Now the right-hand side is just the hyperbolic distance between the two
b = ∂H that pass through τ1 and τ2 . By replacing
horocycles resting on ∞ ∈ R
45
Γ(1, 0) with Γ(p, q), we see in the same way that
dT (τ1 , τ2 ) ≥
1
dH (H1 (p/q), H2 (p/q)),
2
where Hi (p/q) is the horocycle resting on p/q and passing through τi . Letting
p/q tend to an endpoint of the geodesic between τ1 and τ2 , the right-hand side
tends to dH (τ1 , τ2 )/2, and thus dT = dH /2.
b naturally determines a 2-fold covering space
Cross-ratios. Any 4-tuple E ⊂ C
b branched over E, where X = C/Λ is a torus and the critical
π : X(E) → C
points of π are the points of order two on X(E). Conversely, the quotient of a
torus X by the involution x 7→ −x gives the sphere with 4 branch points E.
The map E 7→ X(E) gives a natural bijection between T0,4 , T1 . Since
the extremal quasiconformal map F : X(E) → X(E ′ ) can be chosen to be a
group homomorphism, it commutes with x 7→ −x and so it descends to a map
b − E) → (C
b − E ′ ). Thus T0,4 and T1 are isometric.
f : (C
f0,4 denote the moduli space of ordered 4-tuples of points on the RieLet M
b − {0, 1, ∞}; the isomorphism is given by taking
f0,4 ∼
mann sphere. Then M
=C
]
the cross-ratio. There is a regular covering map M
0,4 → M0,4 with Galois
group S3 . From the discussion above, we have:
f0,4 ∼
Corollary 4.2 The Teichmüller metric on the space of cross-ratios M
=
b − {0, 1, ∞} coincides with the hyperbolic metric of constant curvature −4.
C
Corollary 4.3 A K-quasiconformal mapping distorts the cross-ratio of any
b−
4 points by a bounded amount, as measured in the hyperbolic metric on C
{0, 1, ∞}.
Corollary 4.4 A K-quasiconformal map f is (1/K)-Hölder continuous.
b − {0, 1, ∞}
Proof. Assume f fixes {0, 1, ∞}. The hyperbolic metric on X = C
near z = 0 is bounded below by |dz|/(|z| log |Az|) for some A > 0, and
Z
a
b
dx
= log log Ax,
x log(Ax)
so for z near zero we have
log K(f ) ≥ dX (z, f (z)) ≥ dX (|z|, |f (z)|) ≥ | log log |Az| − log log |Af (z)||,
which gives |f (z)| ≤ O(|z|1/K ).
This proves Hölder continuity of f at z = 0. By replacing f with Af B for
Möbius transformations A and B, the same proof applies near any point.
46
Corollary 4.5 The space of K-quasiconformal homeomorphisms of the sphere
b
is compact, up to the action of Aut(C).
Proof. Once normalized to fix 3 points, the space of K-quasiconformal maps is
uniformly Hölder continuous by the preceding corollary, and it is closed because
the property mod(f Q) ≤ K mod(Q) persists under uniform limits. By ArzelaAscoli, we have compactness.
4.3
Quadratic differentials
Let X be a Riemann surface. A quadratic differential φ on X is a tensor locally
given by φ = φ(z)dz 2 , where φ(z) is holomorphic. In other words, φ is a section
of the square of the canonical bundle on X.
If φ(p) 6= 0, then we can find a local chart near p in which φ = dz 2 . This
chart is unique up to
z 7→ ±z + a;
(4.1)
it is given locally by
z(q) =
Z
p
q
p
φ.
√
(Note that φ is a holomorphic 1-form.)
A quadratic differential determines a flat metric |φ| on X and a foliation F
tangent to the vectors with φ(v) > 0. For the differential φ = dz 2 on C, the
metric is just the Euclidean metric on the foliation is by horizontal lines. Note
that these structures are preserved by the transformations (4.1).
If φ(p) = 0, then there is a local chart with φ(z) = z d dz 2 . The metric |φ| has
a cone-like singularity with (2 + d)π degrees at p (and thus negative curvature);
the foliation has d + 1 leaves coming together at p.
A quadratic differential is integrable if
Z
|φ| < ∞.
kφk =
X
Let Q(X) denote the Banach space of all integrable quadratic differentials with
the L1 -norm above. The norm of φ is simply the total area of X in the |φ|-metric.
Proposition 4.6 Let X be a Riemann surface of finite type. Then Q(X) consists of the holomorphic quadratic differentials on X with at worst simple poles
at the punctures of X.
Proof. Near z = 0,
R
|dz|2 /|z|n =
R
r−n r dr dθ converges iff n < 2.
47
Example. The surface X = C∗ becomes an infinite cylinder in the metric
determined by φ = dz 2 /z 2 , so φ 6∈ Q(X). On the other hand, for X = (C −
{0, 1, a}), the differential
dz 2
φ=
z(z − 1)(z − a)
lies in Q(X). When a ∈ R, X is the double of a rectangle (a pillowcase) in the
|φ|-metric.
Corollary 4.7 If X is a Riemann surface of
n−3
1
dim Q(X) =
n−1
3g − 3 + n
4.4
finite type (g, n), then
g
g
g
g
= 0,
= 1, n = 0,
= 1, n > 0,
≥ 2.
Measured foliations
A measured foliation F on a manifold M is a foliation equipped with a measure
on the space of leaves. That is, F comes equipped with a measure α on all
transversals T to F , such that the natural maps between transversals (following
the leaves of the foliation) are measure-preserving. Morally, α is a measure on
the leaf space of F .
Basic examples.
1. The foliation by horizontal lines in C with the transverse measure |dy|
determines a measured foliation F , such that the mass of a transversal T
is its total variation in the vertical direction.
2. Since F is translation invariant, it descends to a measured foliation on
any complex torus X = C/Λ.
3. On a surface, a measured foliation is determined by a degenerate metric g
of rank one on X. The null-geodesics of g are the leaves of the foliation, and
the measure of a transversal is its g-length. Thus g(x, y) = y 2 describes
the standard foliation in the plane.
4. A nowhere vanishing holomorphic quadratic differential φ on X similarly
determines a measured foliation F (φ). In a chart where φ = dz 2 , the
measured foliation becomes the usual one whose leaves are horizontal lines.
The degenerate metric g defining F (φ) is given by
p
g = | Im φ|2 .
The measured foliation F (−φ) has leaves orthogonal to those of F (φ), and
the product of the transverse measures gives the area form determined by
the quadratic differential:
|φ| = αF (φ) × αF (−φ) .
48
5. By convention, one broadens the definition of a measured foliation on a
surface to allow singularities like those of quadratic differentials at their
zeros. Then any holomorphic quadratic differential determines a measured
foliation.
6. A closed 1-form ω with generic zeros determines a measured foliation
with singularities smoothly equivalent to the standard model (z dz)2 at
z = 0. Namely ω = df locally, the foliation F is by the level sets of f
(or the integral curves of the kernel of ω), and the f is the integral of
the transverse measure. Conversely, any transversely oriented measured
foliation corresponds to a closed 1-form.
The special feature of holomorphic quadratic differentials is that they
locally correspond to the square of a harmonic 1-form. Geometrically this
means that the foliation obtained by rotating the leaves of F (φ) by 90◦
(or any other angle) also comes equipped with a transverse measure; or
that F (φ) is locally defined by a 1-form ω such that d ∗ ω = 0.
Now given a measured foliation F and a conformal metric ρ, we can form a
measure ρ × αF on X that is locally the product of the transverse measure of
F with ρ-length along leaves. We define the length of F by
Z
Z
ℓρ (F ) =
ρ(z)|dz| =
ρ × αF .
F
X
′
Let us say F ∼ F if there is a homeomorphism of X, isotopic to the identity,
sending F to F ′ . This relation is meant to generalize the idea of moving a simple
curve by isotopy. Then the extremal length of F on X is defined by
λ(F , X) = sup
ρ
inf F ∼F ′ ℓρ (F ′ )2
.
areaρ (X)
A measured foliation is geodesic for ρ if it minimizes ℓρ (F ) in its isotopy
class, and ρ is extremal if it maximizes the extremal length quotient above.
Theorem 4.8 Let φ ∈ Q(X) be a nonzero holomorphic quadratic differential
on a Riemann surface X of finite type, and let ρ = |φ|1/2 . Then
ℓτ (F (φ)) ≤ ℓρ (F (φ))
for any metric τ with areaτ (X) = areaρ (X). Equality holds iff τ = ρ.
Proof. By definition, the restriction of ρ = |φ|1/2 to the orthogonals of F =
F (φ) gives its transverse measure. Thus
Z
2
2
2
ℓρ (F ) =
ρ
= areaρ (X)2 .
X
On the other hand, by Cauchy-Schwarz,
Z 2 Z
2 Z
Z
2
2
2
ℓτ (F ) =
τ
=
τρ ≤ τ
ρ2 = (areaρ (X)) ,
F
X
49
by our assumption that τ and ρ give X the same area. If equality holds in
Cauchy-Schwarz, then τ is a constant multiple of ρ, so τ = ρ by our normalization of the area.
Corollary 4.9 We have λ(F (φ)) = kφk, and ρ = |φ|1/2 is the unique extremal
metric for F (φ), up to scale.
Proof. The foliation F = F (φ) is the unique geodesic in its equivalence class
because ρ is a metric of non-positive curvature. More precisely, suppose F ′ =
f (F ), where f is isotopic to the identity. Define a map g : X → X by sending
each leaf L′ of F ′ to the corresponding leaf L = f −1 (L) of F by the nearestpoint projection, in the ρ-metric. Since L is a ρ-geodesic and ρR is non-positively
R
curved, this projection does not increase distances. Thus F ′ ρ ≥ F ρ and
therefore F is geodesic. It follows that
λ(F ) ≥
inf F ′ ℓρ (F ′ )2
ℓρ (F )2
≥
= areaρ (X) = kφk.
areaρ (X)
areaρ (X)
On the other hand,
λ(F ) = sup
τ
ℓρ (F )2
ℓτ (F )2
inf F ′ ℓτ (F ′ )2
≤ sup
≤
= kφk
areaτ (X)
areaρ (X)
τ areaτ (X)
by the preceding theorem, and for equality to hold we must have τ a constant
multiple of ρ.
Unique ergodicity. The ρ-geodesic representative of F (φ) may not be unique
as a measured foliation. For example, let X = C/Z ⊕ τ Z be a torus, let φ =
[dz 2 ] ∈ Q(X), and let F = F (φ) and ρ = |φ|1/2 . Then projection to the y-axis
gives a fibration
π : X → S 1 = R/Z Im τ,
whose fibers are the leaves of F . The transverse measure to F pushes forward
to give a measure α on S 1 , and conversely any measure α′ on S 1 determines a
measured foliation F ′ with the same leaves as F . If the total mass of α and α′
is the same, then F ′ ∼ F , and both are geodesic for the ρ-metric, even though
they are distinct as measured foliations.
On the other hand, we say a measured foliation is uniquely ergodic if it admits
a unique transverse invariant measure up to scale. For example, an irrational
foliation of X is uniquely ergodic. If F (φ) is uniquely ergodic, then it is the
unique geodesic measured foliation in the |φ|1/2 -metric.
50
4.5
Teichmüller’s theorem
In this section we continue to assume χ(S) < 0, so the Riemann surfaces in
Teich(S) are hyperbolic.
Definition. Let X, Y ∈ Teich(S) be marked Riemann surfaces. A Teichmüller
mapping
f :X→Y
is a quasiconformal map, respecting markings, such that
µ(f ) =
∂f
φ
=k
∂f
|φ|
for some φ ∈ Q(X) and 0 ≤ k < 1. The map f has dilatation K = (1+k)/(1−k).
Equivalently: there is a quadratic differentials φ ∈ Q(X) such that, away
form its zeros, there are charts on X and Y in which φ = dz 2 and f (x + iy) =
Kx + iy.
This means f maps F (φ) to F (ψ) for some ψ ∈ Q(Y ), stretching the leaves
of F (φ) by a constant factor K in the flat metric, and sending the orthogonal
leaves to the orthogonal leaves by an isometry.
Theorem 4.10 Let f : X → Y be a Teichmüller mapping between hyperbolic
Riemann surfaces. Then f is the unique extremal quasiconformal map in its
homotopy class. That is, K(g) ≥ K(f ) for any g homotopic to f , and equality
holds iff f = g. In particular,
dT (X, Y ) =
1
log K(f ).
2
Proof. First note that the identity map is the only conformal map homotopic
to the identity. This can be seen by lifting f to the universal cover so it induces
the identity on the circle at infinity. So we may assume K = K(f ) > 1.
Let φ ∈ Q(X) and ψ ∈ Q(Y ) be the quadratic differentials (unique up to
a positive multiple) such that kψk = Kkφk and f (F (φ)) = F (ψ). That is, f
stretches the leaves of F (φ) by the factor K.
Consider any quasiconformal mapping F : X → Y homotopic to f . Let
ρ = |ψ|1/2
be the extremal metric for F (ψ) on Y , let
g = F ∗ (ρ)
be the Riemannian metric obtained by pulling it back, and let
γ ≤ g ≤ K(F )γ
51
be the ‘rounding down’ of g, i.e. the largest conformal metric on X lying below
g. Then:
K(f )kφk =
=
ℓρ (F (ψ))2
ℓρ (F (F (φ)))2
≤
areaρ (Y )
areaρ (Y )
2
2
ℓγ (F (φ))
ℓg (F (φ))
≤ K(F )
≤ K(F )λ(F (φ)) = K(F )kφk.
areag (X)
areaγ (X)
kψk = λ(F (ψ)) =
Therefore K(F ) ≥ K(f ) and thus f is extremal.
To check uniqueness, suppose equality holds above. Then the process of
rounding down, that is replacing g with γ, must decrease the area of X by
exactly K(F ) while holding the length of F (φ) constant. It follows that the
major axis of g must be tangent to F (φ), and the eccentricity of g must be
K(F ) = K(f ) a.e. But then µ(f ) = µ(g), so g −1 ◦ f is a conformal map isotopic
to the identity, and thus f = g.
Theorem 4.11 (Teichmüller’s theorem) There is a unique Teichmüller mapping f : X → Y between any pair of Riemann surfaces X, Y ∈ Teich(S).
Proof. The proof is by the ‘method of continuity’.
Let Q(X)1 denote the open unit ball in Q(X). We will define a map
π : Q(X)1 → Teich(S)
such that the theorem holds for all Y in the image; then we will show π is a
bijection.
To define π, let φ belong to Q(X)1 and let k = kφk < 1. For φ = 0 we set
π(0) = X. Otherwise, we construct a Teichmüller mapping f : X → Y with
µ(f ) = kφ/|φ|, and set π(φ) = (f, Y ).
To construct Y , we just apply a stretch by the factor K = (1 + k)/(1 − k)
along the foliation F (φ), to obtain charts for a new Riemann surface. The complex structure fills in over the isolated zeros of φ by the removable singularities
theorem. Then by construction we have a Teichmüller mapping f : X → Y
stretching along F (φ).
Since f is extremal, we have d(X, π(X)) = 21 log K. Since the extremal
is unique, and f determines φ, we can recover φ from π(X); and thus π is
injective. But π is also continuous, and the dimensions of domain and range
are equal by Theorem 3.1. Therefore π is an proper local homeomorphism, and
thus a covering map. Since π is injective, it is a global homeomorphism.
In particular, π is surjective, so any Y ∈ Teich(S) is the target of a Teichmüller mapping with domain X.
52
The case of a torus. When S is a torus, Teichmüller’s theorem still holds up
to the action of translations on X. That is, the Teichmüller mapping is only
unique up to composition with a conformal automorphism of X isotopic to the
identity.
Real and complex Teichmüller geodesics. Associated to a nonzero quadratic
differential φ ∈ Q(X) is an isometric, holomorphic map
∆ → Teich(S)
of the unit disk (with curvature −4) into Teichmüller space. This map t 7→ Xt
is defined by letting Xt be X endowed with the complex structure coming from
the Beltrami differential
µt = tφ/|φ|,
i.e. for t = keiθ , the surface Xt is the terminus of the Teichmüller mapping
f t : X → Xt
with quadratic differential e−iθ φ and with dilatation K(ft ) = (1 + k)/(1 − k).
The image of the geodesic (−1, 1) ⊂ ∆ is the real Teichmüller geodesic
through X determined by φ; the image of ∆ itself is the corresponding complex
geodesic.
4.6
The tangent and cotangent spaces to Teichmüller space
On any complex manifold M , a deformation of complex structure can be defined
by moving charts relative to one another. Thus the deformations are naturally
isomorphic to H 1 (M, Θ), where Θ is the sheaf of holomorphic vector fields on
M . This point of view is the basis of Kodaira-Spencer deformation theory.
On a Riemann surface X, Θ is the sheaf of sections of K ∗ , the dual of the
canonical bundle. By Serre duality,
H 1 (X, Θ)∗ ∼
= H 0 (X, K − Θ) = H 0 (X, 2K) = Q(X).
In other words, Q(X) is naturally the cotangent space to the Teichmüller space
Teich(S) at X.
From the quasiconformal point of view, any complex structure on X can be
specified by a Beltrami differential of norm less than one, and thus we have a
surjective holomorphic map
π : M (X)1 → Teich(S)
sending 0 to X.
Here is a concrete description of this map π. First present X as the quotient
H/Γ of the upper half-plane by a Fuchsian group Γ. Given µ ∈ M (X)1 , lift it
to H and extend it by reflection to the lower half-plane, obtaining a differential
b 1 . Now let F denote the solution to the Beltrami equation
µ
e ∈ M (C)
Fz
=µ
e
Fz
53
that fixes {0, 1, ∞}. Then by symmetry, F sends H to itself. Since µ
e is Γinvariant, F conjugates Γ to a new Fuchsian group Γ′ . Let X ′ = H/Γ′ . Then F
descends to a quasiconformal map f : X → X ′ , and π(µ) = (f, X ′ ).
The tangent space TX Teich(S) is the quotient of M (X) (the tangent space to
M (X)1 at the origin) by the space of trivial deformations of X. Here µ is trivial
if the complex structure it specifies is the same as the original structure on X up
to isotopy. On an infinitesimal level, this means µ = ∂v for some quasiconformal
vector field on X. (The space of such v can be thought of as the tangent space
at the identity to the group QC(X) of quasiconformal homeomorphisms of X
to itself.)
R
We claim µ = ∂v iff µφ = 0 for every φ ∈ Q(X). To see this, we note that
the space M0 (X) of trivial µ is a closed subspace of M (X), by compactness of
quasiconformal vector fields. As Banach spaces we have
L1 (X, dz 2 )∗ = L∞ (X, dz/dz) = M (X),
so M0 (X) = P ⊥ for some subspace P of the space of L1 measurable quadratic
differentials. But if φ ∈ P , then
Z
Z
φ∂v = − (∂φ)v = 0
X
X
for every smooth vector field v, and thus ∂φ = 0 as a distribution. Thus
P ⊥ ⊂ Q(X), and the reverse inclusion is obvious.
Now think of µ ∈ M (X) as representing an infinitesimal quasiconformal
mapping f : X → X ′ with dilatation ǫµ. Then
d(X, X ′ ) =
1
1
1 + ǫkµk
log K(f ) = log
= ǫkµk + O(ǫ2 ).
2
2
1 − ǫkµk
Thus the L∞ norm on M (X) gives the dilatation of f . If we vary µ by elements of M0 (X), we obtain all maps that are infinitesimally isotopy to f . Thus
the infinitesimal form of the Teichmüller metric is just the quotient norm on
M (X)/M0 (X). Similarly, the cometric on Q(X) is just the induced norm from
L1 (X, dz 2 ).
Summarizing, we have:
Theorem 4.12 For any X ∈ Teich(S), we have
TX Teich(S)
∗
Teich(S)
TX
∼
= M (X)/Q(X)⊥ and
∼
= Q(X).
The quotient L∞ -norm on M (X)/Q(X)⊥ is the Teichmüller metric, and the
L1 -norm metric on Q(X) is the Teichmüller cometric.
Note that these Banach spaces are generally not Hilbert spaces, and thus
the Teichmüller metric is generally not a Riemannian metric.
54
The factors 1/2 and 4. The definition of the Teichmüller metric as dT (X, Y ) =
(1/2) inf log K(f ) is compatible with the natural L1 and L∞ norms on the tangent and cotangent space used above. The same factor arises if we use the
Euclidean metric on C to give a metric ρ on T0 ∆; then ρ agrees at z = 0 with
the metric of constant curvature −4, not −1.
Geodesics and cotangents. At first sight it seems strange that a Teichmüller
geodesic is associated to a quadratic differential φ ∈ Q(X), because Q(X)
is the cotangent space to Teichmüller space (rather than the tangent space).
The explanation is that the Teichmüller metric, while not Riemannian, gives
a nonlinear duality between PQ(X) and PM (X)/Q(X)⊥. Namely to each line
Rφ ⊂ Q(X) there is associated the supporting hyperplane Hφ for the unit ball
BX = {φ : kφk ≤ 1}. This hyperplane is the kernel of the Beltrami differential
µ = φ/|φ|, and µ is tangent to the Teichmüller geodesic that stretches along φ.
4.7
A novel formula for the Poincaré metric
b − {0, 1, ∞} is given by
Theorem 4.13 The hyperbolic metric ρ(t)|dt| on C
Z
|dz|2
ρ(t)−1 = 2|t(t − 1)|
.
b |z||z − 1||z − t|
C
b − {0, 1, ∞} as determining a Riemann surface Xt =
Proof. Think of t ∈ C
b − {0, 1, ∞, t} in the moduli space of a 4-times punctured sphere. The TeC
ichmüller metric has constant curvature −4 so up to a factor of 2 it agrees
b deterwith the Poincaré metric ρ(t). On the other hand, a vector v ∈ Tt C
mines a deformation of Xt whose Teichmüller length is given by | Rest (vφ)|/kφk,
where φ ∈ Q(Xt ) is any nonzero holomorphic quadratic differential. Taking
φ(z) = dz 2 /(z(z − 1)(z − t)), we obtain the formula above.
4.8
The Kobayashi metric
Why is the Teichmüller metric important? Given any complex manifold M ,
the Kobayashi metric on M is defined as the largest metric such that every
holomorphic map
f :∆→M
satisfies kf ′ (0)k ≤ 1. For example, on the disk itself, the Kobayashi metric
is |dz|2 /(1 − |z|2 ), the multiple of the hyperbolic metric that gives constant
curvature −4.
The Kobayashi metric is generally not a Riemannian metric; rather, it is a
Finsler metric defined by a norm on each tangent space to M . The manifold
M is Kobayashi hyperbolic if this metric is nowhere degenerate. A nice criterion
for hyperbolicity is:
Theorem 4.14 A compact complex manifold M is Kobayashi hyperbolic iff every holomorphic map f : C → M is constant.
55
Cf. [La, III, §2]. For example, if M is covered by a bounded domain in Cn , then
it is Kobayashi hyperbolic.
From the definition it is easy to see:
Theorem 4.15 Any holomorphic map between complex manifolds is distance
non-increasing for the Kobayashi metric.
Now for Teichmüller space we have:
Theorem 4.16 (Royden) The Teichmüller metric on Teich(S) coincides with
the Kobayashi metric.
Corollary 4.17 Any holomorphic map f : Teich(S) → Teich(S) satisfies
d(f X, f Y ) ≤ d(X, Y )
in the Teichmüller metric.
This Corollary is a Schwarz lemma for Teichmüller space. It indicates that
the Teichmüller metric is well-adapted to the problem of finding the fixed-point
of an iteration on Teichmüller space.
See [La] for more details on Kobayashi hyperbolicity.
4.9
Moduli space
The moduli space M(S) = Teich(S)/ Mod(S) is obtained from Teichmüller space
by forgetting the marking of S. Moduli space is an orbifold with exactly one
point for each isomorphism class of Riemann surface of the type specified by
S. The orbifold structure arises because Mod(S) does not act freely; for any
X ∈ Teich(S), the stabilizer of X in Mod(S) is isomorphic to the conformal
automorphism group Aut(X).
Example. For a torus, Mod(S) is the (2, 3, ∞) orbifold H/ SL2 (Z); it is isob − {0, 1, ∞} by its S3 automorphism group.
morphic to the quotient of C
Theorem 4.18 (Mumford) Let ML ⊂ M(S) be the set of Riemann surfaces
whose shortest closed hyperbolic geodesic is of length ≥ L > 0. Then ML is
compact.
Proof. For any X ∈ M(S), we have
area(X) = 2π|χ(S)|
by Gauss-Bonnet. If X belongs to ML , then balls of radius L/10 on X are
embedded, and by the area bound there is an N = N (L, S) such that X is
covered by N closed balls of radius L/10.
Given a sequence Xn ∈ ML , choose such a covering Bn for each n. Passing
to a subsequence, we can assume the nerve of Bn is constant. (The nerve is the
56
finite complex with a vertex for each ball and a k-simplex for each k-tuple of
balls with nonempty intersection).
Now choose a baseframe at the center of each ball. Whenever two balls meet,
we can lift them uniquely to H2 so the first frame goes to a fixed standard frame
(e.g. at the origin in the ball model for H2 ); then there is a unique isometry of
H2 moving the first frame to the second. In this way the oriented edges of the
nerve of Bn are naturally labeled by hyperbolic isometries.
These isometries range in a compact subset of Isom(H2 ), so after passing to
a subsequence we can assume they converge. Along the way a cocycle condition
is satisfied along the boundary of any 2 simplex of the nerve, so the cocycle
condition holds in the limit by continuity. Thus the limiting data determines
charts for a hyperbolic manifold X∞ , and X∞ is closed since it is covered by a
finite number of balls B∞ .
Now each ball in B∞ is naturally associated to a ball in Bn for n ≫ 0. Using
baseframes, we obtain isometries between associated balls. Using a partition
of unity on X∞ , we can piece these isometries together to obtain a continuous
map fn : X∞ → Xn for all n ≫ 0. Since the gluing data for Xn converges to
that of X∞ , the isometries relating adjacent balls are nearly the same, so fn is
a nearly isometric diffeomorphism for all n ≫ 0. In particular, K(fn ) → 1, and
thus the Teichmüller distance from Xn to X∞ tends to zero.
Thus X∞ ∈ ML and we have shown every sequence in ML has a convergent
subsequence.
4.10
The mapping-class group
In this section, following [Bers2], we give the proof of:
Theorem 4.19 (Thurston) Any mapping-class [f ] ∈ Mod(S) has a reprentative which is: finite order, reducible, or pseudo-Anosov.
Pseudo-Anosov mappings. Here f is reducible if there is a multicurve C ⊂ S
whose components are permuted by f .
A mapping f : X → X on a Riemann surface is pseudo-Anosov if f is a
Teichmüller mapping of dilatation
K 2 > 1 and its initial and terminal quadratric
R
differentials (normalized so |q| = 1) coincide. Note that the Riemann surface
X is not unique — it can be chosen as any point on the loop in Mg determined
by f .
With this in mind, we say f : S → S is pseudo-Anosov it is preserves a pair
of transverse, measured foliations, multiplying the transverse measure on one
by K and on the other by 1/K.
This structure permits a detailed analysis of the topological and measuretheoretic properties of f . For example:
Proposition 4.20 A pseudo-Anosov mapping is ergodic.
57
Proof. (Hopf.) The ergodic sums of T n for n > 0 are clearly constant along
the leaves of one foliation, and the sums for n < 0 are constant along the leaves
of the other. Thus their limit is constant.
Proposition 4.21 The period points for f are dense.
Proof. Take a small square S ⊂ X. By Poincaré recurrence, we can find a
large n such that f n (S) meets S. Thus f n (3S) passes near the center of 3S,
giving a long thin rectangle cutting through two of its sides. It follows easily
that f n |3S has an invariant leaf and there is a fixed point on this leaf.
A more detailed analysis shows:
Proposition 4.22 The map f is mixing, and each of its invariant foliations is
uniquely ergodic.
Proof of Theorem 4.19. Connect X to f X by a path in Tg and project to
obtain a loop γ ⊂ Mg of finite length. Now try to shrink this loop to make it
as short as possible. If it shrinks to a point, f is of finite order; if it goes out
the end of moduli space, f is reducible; and if it shrinks to a geodesic, then f
is pseudo-Anosov.
For a more precise analysis, observe that in the last case we can find an
X ∈ Tg minimizing d(X, f X). Let Y be the midpoint of the geodesic from X
to f X; then we must have
d(Y, f Y ) = d(Y, f X) + d(f X, f Y ).
But for a pair of linear maps, we have K(AB) < K(A)K(B) unless the expanding and contracting directions coincide. This shows the initial and terminal
foliations of f coincide.
4.11
Counterexamples
1. There exist normalized K-quasiconformal maps fn : C → C such that
µ(fn ) → 0 weakly but fn does not converge uniformly to the identity.
Fix K > 1 and let f (x + iy) = x + s(y), where s is a piecewise-linear
function with s(0) = 0 and
(
K
on [2n, 2n + 1) and
′
s (y) =
1/K on [2n + 1, 2n + 2).
Then the dilatation µ(f ) is constant on horizontal strips of unit width, but
alternating in sign. Thus if we set fn (z) = nf (z/n), then µ(fn ) alternates
sign on strips of width 1/n. Moreover, fRn fixes {0, 1, ∞} and µ(fn ) → 0 in
the weak topology on L∞ (C) (that is, µ(fn )g → 0 for any f ∈ C0∞ (C)).
But fn converges uniformly to the real-linear map F (x + iy) = x + iLy,
where L = (K + 1/K)/2.
58
2. There exist locally affine maps f : X → Y between Riemann surfaces of
finite type which are not Teichmüller mappings.
Fix λ > 1 and let X = C∗ /λZ be a complex torus. Define ft : C∗ → C∗
by
ft (x + iy) = x + et y.
Then ft (λz) = λft (z), and F = f1 : X → X is a locally affine map.
But f0 (z) = z, so F is isotopic to the identity, and thus it is not the
Teichmüller mapping in its homotopy class.
The vertical lines of maximal stretch of F (t > 0) descend to give a Reeb
foliation F of X; there are two closed leaves, coming from the imaginary
axis, and all other leaves of F spiral from one closed leaf to the other.
Because of the spiraling, this foliation admits no transverse invariant measures other than δ-masses on the closed leaves.
Note that F : X → X, while locally affine, is not Anosov — it preserves
a splitting of the tangent space, but the splitting is not along the stable
and unstable manifolds of F .
4.12
Bers embedding
In this section we discuss the Teichmüller space of a quite general Riemann
surface X, and its embedding as a domain in a complex Banach space.
Ideal boundary. Let X = H/ΓX be a hyperbolic Riemann surface, presented
as the quotient of the upper halfplane by a Fuchsian group. We do not assume
that X has finite volume.
b = R ∪ {∞}.
The group ΓX acts on the whole sphere, with limit set Λ ⊂ R
In particular the quotient of the lower halfplane,
X ∗ = (−H)/ΓX ,
is the complex conjugate of X. The map z 7→ z1 descends to a natural anticonformal isomorphism X → X, identifying their fundamental groups.
b − Λ be the domain of discontinuity of ΓX acting on R.
b Then we
Let Ω = R
can form a partial compactification of X by taking the quotient
X = (H ∪ Ω)/ΓX .
We refer to ideal-∂X = X − X as the ideal boundary of X.
b Any quasiconformal f : H → H extends to
As a special case, ideal-∂H = R.
a homeomorphism of H, and thus any quasiconformal map f : X → Y extends
to a homeomorphism f : X → Y .
Homotopy and isotopy. The key to defining the Teichmüller space is to know
which quasiconformal maps f : X → X are to be considered trivial. Luckily
several natural notions coincide.
Theorem 4.23 Let X = H/ΓX and let f : X → X be a quasiconformal map.
The following are equivalent.
59
b
1. There is a lift of f to a map H → H that extends to the identity on R.
2. The map f is homotopic to the identity rel ideal boundary.
3. The map f is isotopic to the identity rel ideal boundary, through uniformly
quasiconformal maps.
See [EaM].
A Riemann surface marked by X is a pair (Y, g) where g : X → Y is a quasiconformal map. Two marked Riemann surfaces (Y, g) and (Z, h) are equivalent
if there is a conformal isomorphism α : Y → Z such that
f = h−1 ◦ α ◦ g : X → X
is isotopic to the identity rel ideal boundary. (Of course any of the other conditions above give the same definition).
The Teichmüller space of X is the space of equivalence classes of Riemann
surfaces (Y, g) marked by X.
Example: universal Teichmüller space. The case where ΓX is the trivial
group, and X = H¡ is called universal Teichmüller space. In this case we have
b PSL2 (R),
Teich(H) ∼
= QS(R)/
b is the group of quasi-symmetric maps g : R
b → R.
b These are exactly
where QS(R)
b
the homeomorphisms of R that arise as boundary values of quasiconformal maps.
Quasifuchsian groups and univalent maps. Fix a model X = H/ΓX
for the universal cover of X. The Bers embedding of Teich(X) is based on a
construction that canonically associates to any (Y, g) ∈ Teich(X):
• A Kleinian group ΓY acting on the Riemann sphere; and
b → C,
b fixing {0, 1, ∞} and conjugating Γ to
• A quasiconformal map F : C
ΓY ; such that
• F is conformal in (−H), Y = F (H)/ΓY and X ∗ = F (−H)/ΓY .
Because of the last property, the group ΓY is said to simultaneously uniformize
X ∗ and Y .
The construction is the following. Let g : X → Y be a Riemann surface
marked by X. Let µ = µ(g), lifted to H and extended to (−H) by 0. Let
b → C
b be the normalized solution to the Beltrami equation µ(F ) = µ.
F : C
Since µ is ΓX -invariant, we have µ(F ◦ γ) = µ(F ) for all γ ∈ ΓX . But the solution to the Beltrami equation is unique up to post-composition with a Möbius
transformation, so there is an isomorphism
such that
b
ρ : ΓX → ΓY ⊂ Aut C
F ◦ γ = ρ(γ) ◦ F
60
for all γ ∈ ΓX .
Thus F conjugates ΓX to ΓY , and by construction F is conformal in (−H).
Since F intertwines ΓX and ΓY , the Schwarzian derivative φY = SF |(−H)
is ΓX -invariant. Since F is univalent, we have φY ∈ P (X ∗ ); in fact kφY k < 3/2.
The map β : (Y, g) 7→ φY gives the Bers embedding
β : Teich(X) → P (X ∗ ).
Image of Bers embedding. Let us write S(X ∗ ) ⊂ P (X ∗ ) for the set of ΓX invariant Schwarzians of univalent (schlicht) maps, and T (X ∗) for the image of
Bers embedding. Then we have
T (X ∗ ) ⊂ S(X ∗ ) ⊂ P (X ∗ ).
In fact, T (X ∗) is exactly the set of Schwarzians of univalent maps to quasidisks.
By the Ahlfors-Weill extension, the ball of radius 1/2 is contained in T (X ∗ ).
With similar reasoning, one can also show that T (X ∗ ) is open. Thus the Bers
embedding provides a model for T (X ∗ ) as a complex manifold, in facts as a
bounded domain in a complex Banach space with
B(1/2) ⊂ T (X ∗ ) ⊂ B(3/2).
Role of the Ahlfors-Weill extension. If Y is close enough to X that kφY k <
1/2, then we can extend F |(−H) to H using the Ahlfors-Weill construction. The
result is a canonical quasiconformal map gY : X → Y , characterized by having
a harmonic Beltrami coefficient
µ(gY ) = ρ−2 φY (z).
Notice that µ(gY ) ∈ M (X) is a holomorphic function of Y , since it is a holomorphic function of φY (for each fixed z). In other words, the Ahlfors-Weill
extension provides a holomorphic Teich(X) 99K M (X) defined near X and lifting the natural holomorphic projection M (X) → Teich(X).
Finite sets on the sphere. The Teichmüller space T0,n of a sphere with n ≥ 3
punctures has an alternative and very simple complex model: we have
T0,n /Gn = {z ∈ Cn−3 : zi 6= zj 6= 0, 1, ∞ ∀i, j},
where Gn is the pure mapping-class group of n points on the sphere (the pure
braid group modulo its center). This group acts without fixed-points by automorphism of T0,n , so Teichmüller space arises as the universal cover of the
complement of suitable hyperplanes in Cn−3 .
The complex structure on T0,n derived from Cn−3 agrees with that coming
from the Bers embedding. To see this consider a Beltrami differential µ on
b − E. Then the solution to the Beltrami equation at any point, fµ (z), is
X=C
b − fµ (E) is the complement of a holomorphically
holomorphic in µ; thus Y = C
moving finite set. At the same time, pulling µ back to −H, the quadratic
differential φY = SFµ is a holomorphic function of µ as well. In other words,
the pair of maps M (X)1 → Cn−3 and M (X)1 → T0,n are both holomorphic
submersions, so the transition between them is also holomorphic.
61
4.13
Conjectures on the Bers embedding
In general one hopes to show that all Kleinian groups are limits of geometrically
finite ones. A precise conjecture in this direction for quasifuchsian groups was
made by Bers.
Conjecture 4.24 For all finite-volume hyperbolic surfaces X, we have T (X) =
S(X).
K. Bromberg has recently announced a proof of this central conjecture.
This conjecture can also be formulated for other Riemann surfaces, including
the unit disk.
It is false for universal Teichmüller space. Let us say a compact quasiarc
b
Q ⊂ C is incorrigible if the Hausdorff limits of Aut(C)·Q
in the space of compact
b
subsets of C include no circle. Then we have [Th]:
Theorem 4.25 (Thurston) There exist isolated points in S(∆). In fact, the
b − Q is isolated in S(∆) for any incorrigible
Riemann mapping f : ∆ → C
quasiarc Q.
Such quasiarcs Q are also called zippers, because they lock two sides of the
plane together. The ‘Bers density conjecture’ can be formulated as saying there
are no group-invariant zippers, at least for finitely-generated nonelementary
Kleinian groups.
4.14
Quadratic differentials and interval exchanges
Let q ∈ Q(X) be a holomorphic quadratic differential on a compact Riemann
surface X. In local coordinates where q = dz 2 , we have a foliation by vertical
lines together with a transverse invariant measure |dx|. These objects patch
together to yield a measured vertical foliation F (q) on X. The corresponding
horizontal foliation is F (−q).
Intrinsically, the tangent space to the vertical F (q) is given by the vectors v ∈
T X such that q(v, v) < 0. If q = ω 2 happens to be the square of a holomorphic
1-form, then F (q)Ris defined by the closed harmonic form ρ = Re(ω). That is,
T F = Ker ρ and | I ρ| = µ(I) gives the transverse measure.
In this section we discuss the dynamics of the foliation F . In other words, we
discuss the asymptotic distribution of very long leaves of F . The usual ergodic
theorems apply to the undirected ‘flow’ along the leaves of F . Indeed, after
passing to a branched double cover of (X, q) we can assume q = ω 2 , in which
case the leaves are coherently oriented by Im ω and we obtain a flow in the usual
sense.
See [MT] for more details.
Cylinders and saddle connections. A saddle connection is a leaf of F joining
a pair of its zeros. A cylinder is an open annulus C ⊂ X foliated by closed leaves
of F . So long as X is not a torus, it carries a canonical collection of disjoint
62
maximal
S cylinders Ci whose boundaries are unions of saddle connections. The
locus Ci coincides with the union of the (smooth) closed leaves of F .
The foliation F is aperiodic if it has no cylinders. It is minimal if every leaf
disjoint from the zeros of q is dense.
Interval exchange. The first return map f : I → I to any transversal arc
to the vertical foliation F (often taken to be an interval along the horizontal
S
foliation) is an interval exchange transformation: there is a partition I = Ii
into disjoint subintervals such that f (x) = x + ti on Ii .
Here the metric |q| is used to identify I with an interval in R. The discontinuities of f come from the zeros of q and the endpoints of I. Note that there
are only finitely many vertical arcs the start on I and terminate on a zero of q
without meeting any other zeros en route. It is useful to choose a convention
for continuing the flow past such points, e.g. by always turning to the right, to
make f well-defined even at the endpoints of the intervals Ii .
The map f is aperiodic if it has no periodic points, and minimal if every
orbit is dense. A transversal is full if it meets every leaf of F ; in this case it
inherits aperiodicity and minimality from F .
Invariant measures. By definition, f preserves Lebesgue measure dx|I. It
may however have other invariant measures ν. These correspond to other transverse invariant measures for F . If ν has full support and no atoms, we can integrate it to obtain a topological conjugacy from f to another interval exchange
g, such that nu becomes dx.
Lack of mixing.
Theorem 4.26 An interval exchange is never mixing.
Proof. Let f : I → I be an interval exchange with n subintervals. We may
assume f is aperiodic, otherwise it is clearly not mixing.
Let J ⊂ I be a subinterval; then
S the first return map gives an induced
interval exchange f ni : Ji → J, Ji = J. Since the discontinuities of the
first return map come from the endpoints of I and the discontinuities of f , the
induced map has at most n + 2 subintervals.
Note that I is partitioned into intervals of the form Jim = f m (Ji ).
Repeat the process by taking the first return map to each Ji . The result is
an interval exchange f nij : Jij → Ji , where again j takes on at most (n + 2)
values.
Now the key point is that we have
m
) ⊂ Jim ,
T nij (Jij
which implies
Jim ⊂
[
T −nij (Jim ).
Note that there are at most (n + 2) terms on the right. Since preimages respect
set operations, if A is any set that is a union of interval of the form Jim , we have
[
A⊂
T −nij (A).
63
But this implies
µ(A ∩ T −nij (A)) > µ(A)/(n + 2)2
(4.2)
for some ij.
Now let B ⊂ I be an interval of length ǫ. Then if we have mixing, there is
an N such that µ(B ∩ T −n (B)) ≈ ǫ2 ≪ µ(B)/(n + 2)2 for all n > N . Choose
J such that all nij > N , and so that the union A of the intervals Jim ⊂ B has
measure at least ǫ/2. Then we obtain a contradiction to the frequent return
guaranteed by (4.2).
Corollary 4.27 The geodesic flow for (X, q), even restricted to geodesics of a
fixed slope, is never mixing.
Theorem 4.28 An aperiodic interval exchange f : I → I with n subintervals
has at most n ergodic invariant probability measures.
Proof. An invariant measure µ is determined by µ(Ii ), and the ergodic invariant
measures map to linearly independent vectors νj (Ii ) in Rn .
4.15
Unique ergodicitiy for quadratic differentials
Unique ergodicity. Let (X, q) be a Riemann
of finite type equipped with a
R
holomorphic quadratic differential with |q| = 1. Let F (q) denote the vertical
foliation of q and let (Xt , qt ), t > 0 be the Teichmüller ray generated by shrinking
the leaves of F (q).
In this section we will establish:
Theorem 4.29 (Masur) If Xt is recurrent in Mg,n , then F (q) is uniquely
ergodic.
Limit sets. We begin with a simple lemma from ergodic theory. Let X and Y
be a compact metric spaces equipped with complete probability measures, and
let
fn : X → Y
be a sequence of measure-preserving maps, (at least Borel measurable).
nk
S Let ω(x) ⊂ Y denote the points of the form y = lim f (x), and let ω(E) =
E ω(x).
Lemma 4.30 We have m(ω(E)) ≥ m(E).
Proof. It suffices to show ω(E)Smeets any closed set B ⊂ Y with m(B) >
m(Y − E). To see this, let BN = n>N fn−1 (B); then we have BN ⊃ BN +1 and
T
T
−1
(B)) = m(B), so m( BN ) ≥ m(B) > m(X − E). Hence
m( BN ) ≥ m(fN
T
there is an x ∈ E ∩ BN ; but this means f n (x) ∈ B for arbitrarily large n and
hence ω(x) meets B by compactness of B.
64
Note. The set ω(E) is the projection to X of the Borel set
E ′ = {(x, y) : ∀n > 0∃m > 0 : d(f m (x), y) < 1/n}) ⊂ E × X.
The projection of a Borel set is not always Borel, but it is measurable for
any complete measure. The proof of the density of ω(E) does not rely on its
measurability.
The pseudo-Anosov case. Next, to clarify the issues in the proof, we will
show:
Theorem 4.31 The invariant foliation F (q) of a pseudo-Anosov mapping f :
X → X adapted to q is ergodic.
(In fact it is uniquely ergodic, but we will see this later.)
To set up the proof: for any continuous function h ∈ C(X) and any x ∈
X, we can average the values of h along long leaves of F (q) through x. If
these averages converge (for leaves in both directions through x), they define a
probability measure νx on X.
By the ergodic theorem, there is a set of full measure E ⊂ X such that νx
exists for all x ∈ E. In fact, for almost every x and f ∈ C(X) we have
Z
f νx = F (x),
where F is the projection of f to the subspace of L2 (X, |q|) consisting of functions that are constant on the leaves of F (q).
Given an infinite set S = {n1 < n2 < · · · } ⊂ N, we let
lim f n (x) = lim f nk (x)
S
k→∞
if the limit exists. For any measurable set A ⊂ X, we let limS (A) denote the
set of possible values of limS f n (x), x ∈ A. Clearly if T ⊂ S then limT (A) ⊃
limS (A).
Lemma 4.32 If x, y ∈ E and limT f n (x) and limT f n (y) both belong to the
interior of the same rectangle R on (X, |q|), then νx = νy .
Proof. Consider the preimages Rn = f −n (R) for n ∈ S. The preimage contains
both x and y, and it almost coincides with a leaf L of F (q) — it is very long
and narrow. Thus for any f ∈ C(X), the average of f over Rn is very close to
its average along a long leaf through x and its average along a long leaf through
y. Consequently νx = νy .
Repeated application of the ergodic theory result above gives:
Lemma 4.33 There exists an S such that limS (E) is dense. Thus for every
rectangle R there exists a νR such that limS Rn /|R| = νR . Finally, if R and R′
meet in their interior, then νR = νR′ . Consequently νR is independent of R.
65
Corollary 4.34 There is a single measure ν such that νx = ν whenever T ⊂ S
and limT (x) is not a zero of q.
Proof of Theorem 4.31. Consider any subset A ⊂ E with m(E) > 0. By the
ergodic theory lemma, m(ω(A, S)) ≥ m(A) > 0, so there exists a T ⊂ S and an
x ∈ A such that limT (x) is not a zero of q. But then νx = ν. Thus νx = ν for
almost every x ∈ E, which implies F is ergodic.
Recurrence. For the proof of Masur’s theorem we will use a more direct understanding of recurrence. Let (Xt , qt ) be the Teichmüller geodesic ray generated
by (X0 , q0 and let F = F (q0 ) as a measured folation.
Theorem 4.35 The Teichmüller ray is recurrent in Mg,n iff
lim sup infS et i(S, cF ) + e−t |S| > 0.
t→∞
Here |S| is any measure of the combinatorial complexity of S; for example,
it can be the length of S with respect to a fixed metric on X, or the size of the
weights for S on one of finitely many train tracks.
Proof. The length of S in the metric |qt | on Xt is a lower bound for its
extremal length. If q0 corresponds to the pair of measured foliations (F , G),
then qt corresponds to (et F , e−t G), and so
L(S, |qt |) ≍ et i(S, F ) + e−t i(S, G).
For t > 0 the second term doesn’t change much if we add i(S, F ), and then the
second term is comparable to |S|. So if the limsup condition above holds, then
the extremal length of simple closed curves are bounded below for a sequence
tn → ∞, which means Xt is recurrent.
Conversely, if Xt is recurrent, then it returns infinitely often to a compact
subset K of Mg,n . Now for all X ∈ K, q ∈ Q(X) of norm 1, and for all simple
closed curves S, there is a uniform lower bound to L(S, |q|). Thus the limsup
condition holds.
Corollary 4.36 Recurrence of Xt depends only on F .
Corollary 4.37 If the ray generated by F is recurrent, and F ′ > F (in the
sense that the transverse measure is larger), then it ray generated by F ′ is also
recurrent.
Now if F is not uniquely ergodic, then there exists an F ′ > F which is not
ergodic. Recurrence for F implies recurrence for F ′ . Because of this, to prove
Masur’s theorem, it suffices to show:
Theorem 4.38 If F generates a recurrent geodesic, then F is ergodic.
66
Proof. Choose points along this geodesic with (Xn , qn ) → (Y, q). Then for all
n ≫ 0 we can construct smooth maps in : Y → Xn , sending |qn | to |q|, such
that i∗n (qn ) converges uniformly to q on compact subsets of Y − Z(q). We can
the compose the Teichmüller map X0 → Xn with i−1
n to get measure-preserving
maps fn : X0 → Y . The same reasoning we used for pseudo-Anosov maps now
applies, with fn replacing f n .
The argument actually shows the following stronger result.
Theorem
R
R 4.39 Suppose (Xt , qt ) accumulates in QMg,n on a form (Y, q) with
|q| = |q0 |. Then the number of ergodic components of q0 is at most the
number of components of the support of q.
Corollary 4.40 If q has connected support, then q0 is ergodic.
The property required of (Y, q) here is not preserved in we replace F with
an F ′ > F , as the Veech examples show. In these examles, F carries two
ergodic measures, say ν and µ. The geodesic generated by ν and by ν + µ both
accumulate on Y = E1 ∧ E2 , a pair of tori joined at a single node. And in both
cases there is no loss of mass in going to the limit. But for ν the limit lives only
on E1 , while for ν + µ it lives on both.
4.16
Hodge theory
Real multiplication in higher genus. [Mo], [Sch].
Theorem 4.41 Let V ⊂ Mg be a Teichmüller curve generated by (X, ω), where
the trace field K of SL(X, ω) has degree g over Q. Then Jac(X) admits real
multiplication by K with ω as an eigenform.
Proof.
P p,q We will use a basic fact about variations of Hodge structures: if σ =
σ is a flat section of a Hodge bundle (over a quasiprojective base such as
V ), then its components σ p,q are also flat. (See e.g. Schmid, Invent. math.,
1973).
Let H → V be the Hodge bundle whose fiber over t is H 1 (Xt , Z) ⊗ C. Let
H0 be the fiber over a basepoint t = 0. Then under the action of π1 (V ), the
space H0 decomposes into 2-dimensional irreducible subspaces
H0 = S 1 ⊕ · · · ⊕ S g ,
where S1 is spanned by ω and ω. The full commutant of π1 (V ) is the abelian
algebra Cg acting diagonally and preserving each Si .
Let P0 : H0 → H0 be projection onto Si . Since P0 commutes with the
action of π1 (V ), it extends to a flat section P of the (weight zero) Hodge bundle
Hom(H, H). By Schmid’s theorem, the Hodge components P ij of P are also
flat. Thus P0ij = P |H0 commutes with π1 (V ), and hence it is diagonal. But
P −1,1 maps H 1,0 into H 0,1 , so it is ”off-diagonal”; for example, its square is
67
zero. Consequently P −1,1 = P 1,−1 = 0, and thus P = P 0,0 . This implies
that P preserves H 1,0 , and therefore each subspace Si decomposes as a direct
sum Si1,0 ⊕ Si0,1 . Thus Jac(X0 ) admits real multiplication by the trace field of
SL(X, ω).
5
Dynamics of rational maps
This chapter develops the basic picture of the dynamics of a single rational map,
and the Teichmüller theory of deformations of its deformations.
5.1
Dynamical applications of the hyperbolic metric
All rational maps will be of degree d > 1.
b is exceptional if E is finite and f −1 (E) ⊂ E.
Exceptional points. A set E ⊂ C
A single point z isSexceptional if it belongs to an exceptional set; equivalently,
if its inverse orbit f −n (z) is finite.
Theorem 5.1 Any rational map f has a maximal exceptional E, |E| ≤ 2 and
E ∩ J(f ) = ∅.
b − E into itself, so
Proof. Consider any exceptional set E. Then f maps X = C
χ(X) ≤ deg(f )χ(X) by Riemann-Hurwitz. Therefore χ(X) = 2 − |E| ≥ 0, and
|E| ≤ 2. Thus the number of exceptional points is at most two, and the union
of all exceptional points gives the maximal exceptional set.
b has d preimages counted with multiplicity, any z ∈ E is a
Since every z ∈ C
critical value, and therefore E consists of superattracting cycles. In particular
E is disjoint from the Julia set.
Since J(f ) is totally invariant we have:
Corollary 5.2 The Julia set is infinite.
Examples. The maximal exceptional set is E = {0, ∞} for f (z) = z d , and
E = {∞} if f (z) is a polynomial not conjugate to z d . These rational maps
represent all the cases where E 6= ∅ (up to conjugacy).
Attractors and critical points. We next use the Schwarz lemma to demonstrate a close connection between critical points and attractors of f . In particular we shall see all but finitely many cycles of a rational map are repelling. (On
the other hand, it is known that smooth dynamical systems — even polynomial
maps in dimension two — can have infinitely many attracting cycles.)
Theorem 5.3 A rational map of degree d has 2d − 2 critical points, counted
with multiplicity.
68
Proof. (1) (Riemann-Hurwitz): Letting N be the number of branch points
b = deg(f ) · χ(C)
b − N , so N = 2d − 2.
counted with multiplicity. We have χ(C)
(2) Write f (z) = P (z)/Q(z) with deg P = deg Q = d (after a generic conjugation). Then the critical points are zeros of P Q′ − P ′ Q. The leading terms of
this polynomial cancel, resulting in a polynomial of degree 2d − 2.
b then V has 2 zeros and no
(3) Let V be a holomorphic vector field on C;
poles. Now consider f ∗ (V ): it has zeros at the 2d preimages of these zeros, and
poles at the critical points of f . Since the number of zeros minus the number
of poles of f ∗ (V ) is still two, we have 2 = 2d − |C(f )|.
Theorem 5.4 Every attracting periodic cycle of f attracts a critical point.
b be the open set of points attracted to a given cycle.
Proof 1. Let U ⊂ C
Since J(f ) is infinite and disjoint from U , the set U is hyperbolic. If U contains
no critical point, then f : U → U is a covering map, hence an isometry for the
hyperbolic metric. But then |f ′ |U = 1, contrary to the existence of an attracting
cycle.
Proof 2. For a superattracting cycle the result is immediate. Otherwise f acts
on the immediate basin U of the cycle by a proper local homeomorphism, hence
a covering map. Clearly U/f is a torus, so U is a covering space of a torus. But
then U is isomorphic to C or C∗ , and these possibilities are easily ruled out.
Corollary 5.5 The number of attracting cycles is at most 2 deg(f ) − 2.
Example. A quadratic polynomial fc (z) = z 2 + c has at most one attracting
cycle in the complex plane, and this cycle can be located by iterating fc on
z = 0.
Corollary 5.6 A rational map f of degree d has at most 4d − 4 non-repelling
cycles.
Proof. Consider the holomorphic family of maps ft (z) = (1 − t)f (z) + tz d ,
t ∈ C. By transversality, any periodic point of multiplier λ 6= 1 can be locally
labeled (near t = 0) by a holomorphic function pt , with ftn (pt ) = pt . In the case
of a multiple periodic point (multiplier 1), the same is true after making a base
change by t 7→ tn .
Now consider the multiplier (f n )′ (pt ) = λt as t varies, and assume p0 is
indifferent. Since z 7→ z d has no indifferent cycle, λt is nonconstant. The set of
directions t ∈ S 1 such that |λǫt | < 1 (and thus pt becomes an attractor for fǫt )
has measure 1/2.
Applying the same reasoning the any collection of N indifferent cycles, we
conclude there is some direction t such that N/2 of them become attracting
for fǫt . Under this perturbation, the attracting cycles for f0 remain attracting.
Since fǫt has at most 2d − 2 attracting cycles, we find:
(attracting) + (indifferent)/2 ≤ 2d − 2,
69
so at most 4d − 4 cycles of f0 are not repelling.
Remarks. It is easy to construct maps of a fixed degree where the period of
one or more attracting cycles is very long. For example, there are cn → −2 such
that the critical point of fn (z) = z 2 + cn has period n.
5.2
Basic properties of the Julia set.
Theorem 5.7 Let J(f ) be the Julia set of a rational map. Then:
1. Repelling periodic points are dense in J(f ).
2. The inverse orbit of every point in J(f ) is dense in J(f ).
b accumulates on J(f ) unless z
3. More generally, the inverse orbit of z ∈ C
is exceptional.
4. If an open set U meets J(f ), then J(f ) ⊂ f n (U ) for some n.
5. The Julia set is perfect: it has no isolated points.
Proof. For (1), consider p ∈ J(f ). By replacing p by a point in its inverse
orbit, we can assume p is neither a fixed-point nor a critical value of f . On any
b with disjoint graphs,
small neighborhood U of p we can find maps gi : U → C
i = 1, 2, 3, such that g1 (z) = z, and f (gi (z)) = z for i = 2, 3.
If f n (z) = gi (z) for some n > 0 and z ∈ U , then either f n (z) = z or
n+1
f
(z) = z, and thus p is approximated by a periodic point. Otherwise the
sequence of functions
−1
f n (z) − g0 (z) g3 (z) − g0 (z)
= Mz ◦ f n
hn (z) = n
f (z) − g1 (z) g3 (z) − g2 (z)
omits {0, 1, ∞}, and is hence normal on U by Montel’s theorem. But then
hf n |U i is normal, contradicting the definition of J(f ).
This shows p is a limit of periodic points of f ; and all but 4d − 4 of these
are repelling. Once p is so approximated, so is any point in the forward orbit of
p, and thus J(f ) is the closure of the repelling periodic points of f .
(2): For p ∈ J(f ) consider any 3 points z1 , z2 , z3 in the inverse orbit of p.
Let U be an open set meeting J(f ). Since hf n |U i is not a normal family, it
cannot omit all 3 values {z1 , z2 , z3 }, and thus f n (z) = zi for some z ∈ U . Thus
the inverse orbit of p enters U .
The same argument applies to any point p with an infinite inverse orbit,
yielding (3).
(4): By (1), U contains a repelling periodic point, so after shrinking U and
replacing f with f n we can assume U ⊂ f (U ). Then f n (U ) is an increasing
sequence of open sets, and by (3) any non-exceptional point is eventually covered
by f n (U ). Since the exceptional points do not belong to J(f ), by compactness
we have J(f ) ⊂ f n (U ) for some finite n.
70
(5): If J(f ) has an isolated point, then by (4) J(f ) is a finite set. Since
f −1 (J(f )) = J(f ), the Julia set must consist of exceptional points, which implies
J(f ) = ∅. But deg(f n ) → ∞, so the iterates of f cannot form a normal family
on the whole sphere.
Corollary 5.8 The Julia set is the smallest totally invariant closed set on the
sphere such that |J(f )| ≥ 3.
Remarks.
1. To apply the Schwarz lemma to a rational map, we want to find a hyperb such that f (Ω) ⊂ Ω. Then F = C
b − Ω is a closed,
bolic open set Ω ⊂ C
backward invariant set with |F | ≥ 3. By Corollary 5.8, the Fatou set Ω(f )
is the largest hyperbolic open set which is mapped into itself.
2. The argument to prove (1) in Theorem 5.7 illustrates a useful generalization of Montel’s theorem: for any bundle of hyperbolic Riemann surfaces
E → U , the space of all holomorphic sections s : U → E is normal. In the
b − {g1 (z), g2 (z), g3 (z)}.
case at hand, the bundle has fibers Ez = C
3. The density of periodic cycles in the ‘chaotic locus’ is not known for a
generic C 2 diffeomorphism of a manifold. Thus the density of periodic
cycles in J(f ) is one of many indications that one-dimensional complex
dynamical systems are better behaved than higher-dimensional smooth
dynamical systems. (For C 1 diffeomorphisms, the generic density of periodic cycles in the non-wandering set is known by Pugh’s ‘closing lemma’
[Pu]).
4. Property (4) is sometimes called LEO (locally eventually onto).
5.3
Univalent maps
We now introduce another very useful tool. Let S be the set of all univalent
analytic maps
f : ∆ → C,
normalized so that f (0) = 0 and f ′ (0) = 1. We give S the topology of uniform
convergence on compact sets.
Theorem 5.9 (Koebe distortion theorem) The space of normalized univalent maps S is compact.
Proof. By the Schwarz Lemma, f (∆) cannot contain B(0, r) for any r > 1. So
given a sequence fn ∈ S, we can find a sequence of points an , bn 6∈ fn (∆) with
|an | = 1 and |bn | = 2. Letting An (z) = (z − an )/(bn − an ), we see
An ◦ fn : ∆ → C − {0, 1}.
71
By Montel’s theorem, we can pass to a subsequence converging on the disk.
Along a further subsequence we have an → a and bn → b with a 6= b, so
An → A. Then An ◦ fn → A ◦ f for some f ∈ S, and thus fn → f .
Corollary 5.10 Writing f (z) =
constants Cn .
P∞
1
an z n , we have |an | ≤ Cn for universal
In fact we can take Cn = n; this is the Bieberbach conjecture, proved by deBranges.
Corollary 5.11 There is an r > 0 such that f (∆) ⊃ B(0, r) for any f ∈ S.
In fact we can take r = 1/4; this is the Koebe 1/4 theorem.
Corollary 5.12 If f : B(z, r) → C is univalent on a ball, then f has bounded
distortion on the smaller ball B(z, r/2). That is, all ratios of distance are distorted by a bounded factor; f is a quasi-similarity.
Keep in mind that the Riemann mapping theorem allows a conformal map
to send ∆ to an arbitrarily wild region. The point of the Corollary is that a
small baller has a controlled image. The yolk of the egg stays good.
5.4
Periodic points
Before analyzing the global dynamics of a rational map, we discuss the local
dynamics of a holomorphic map near one of its fixed-points. Let f be an analytic
mapping fixing z = 0, with multiplier λ = f ′ (0). We distinguish several cases,
depending on the multiplier.
Attracting case: 0 < |λ| < 1.
Theorem 5.13 (Linearization) There is a holomorphic chart φ : (U, 0) →
(C, 0) such f (w) = λw where w = φ(z).
Proof 1. Let B(0, s) be a small enough ball that |f (z)| ≤ r|z| < |z| for all
z ∈ B(0, s) − {0}. Then |zn | = |f n (z)| = O(rn ). Defining φn (z) = λ−n f n (z),
we have
φn+1 (z)
zn + O(zn2 )
λ−1 f (zn )
=
= 1 + O(rn ).
=
φn (z)
zn
zn
P n
Since
r < ∞, φn (z) converges uniformly to a nonzero holomorphic map
φ : (U, 0) → (C, 0). Since φ′ (0) = lim φ′n (0) = 1, the map φ is a chart on a small
enough neighborhood of z = 0.
Proof 2. Consider the annulus A = B(0, s) − f (B(0, s)) for s small. Then
X = A/f is a Riemann surface, indeed a complex torus. The subgroup of
π1 (X) corresponding to f determines a cyclic covering space of X isomorphic
to C∗ . Uniformization of this covering space gives the linearizing map.
72
Superattracting case: λ = 0.
Theorem 5.14 Suppose f (z) = z d + O(z d+1 ), d > 1. Then there is a holomorphic chart φ : (U, 0) → (C, 0) such f (w) = wd , where w = φ(z).
Proof. For z small enough we have
|zn | = |f n (z)| ≤
1
.
2dn
n
Let φn (z) = (f n (z))1/d , where the dn -th root is chosen so that φ′n (0) = 1.
Then
1/dn
n
n
φn+1 (z)
f (zn )1/d
=
= (1 + O(zn ))1/d = 1 + O(z n ) = 1 + O(2−d ).
φn (z)
zn
P −dn
Since
2
converges (very rapidly!), φn converges uniformly to the desired
chart φ.
Parabolic case: λ = 1. Assuming f is not the identity, we can make a linear
change of coordinates so that
f (z) = z + z p+1 + O(z p+2 ),
p ≥ 1. The behavior of f is controlled by the leading term in f (z) − z.
Indeed, the dynamics of f is nicely modeled by the holomorphic vector field
V = z p+1
∂
·
∂z
For p = 1, V is an infinitesimal parabolic Möbius transformation, and its orbits
are circles tangent to the real axis at z = 0. Every orbit converges to z = 0,
although those near the real axis make a long excursion away from z = 0 before
returning to converge.
For p > 1, the picture is just a p-fold cover of the parabolic picture.
Theorem 5.15 (Leau-Fatou flower theorem) For p = 1, there is a petal U
tangent to the positive real axis such that f (U ) ⊂ U and f n (z) → 0 uniformly
on compact subsets of U . The quotient Riemann surface U/f is isomorphic to
C∗ .
For p > 1 there are p such petals, U1 , . . . , Up , each invariant under f and
tangent to the lines arg(z) = 2πk/p, k = 1, 2, . . . , p. We have Ui /f ∼
= C∗ .
Proof. First suppose p = 1. The discussion is mostly easily carried out by
moving the fixed-point to infinity with the coordinate change w = −1/z. Then
f (w) = w + 1 + O(1/w),
73
Figure 14. One and several petals
from which we see f n (w) = w + n + O(log n) if Re w ≫ 0. It follows that the
basin of attraction of w = ∞ contains the half-plane H = {w : Re w > R} for
some large R. By considering the action of f on the edges of the strip H −f (H),
we see that H/f ∼
= C∗ .
Now if Re w is less than R, we can still insure that the orbit of w enters H so
long as | Im w| is large enough and a gradual drift towards w = 0 coming from the
O(1/w) terms is controlled. If w = x + iy, it will take approximately n = R − x
iterations to reach H, and the potential vertical drift is O(log n) = O(log(2+|x|),
so we set
U = {w = x + iy : x > R or |y| > C log(2 + |x|)}.
Then f (U ) ⊂ U and f n (w) → ∞ in U as desired. Since the slope of the
boundary of U tends to zero as x → −∞, in the z-coordinate U is tangent to
the positive real axis.
The case of p > 1 is similar. It is useful to make the coordinate change
w = −1/z p; then f is a multivalued map, spread out over the w-plane, with the
form
f (w) = w + 1 + O(w−1/p ).
Parabolic case: λq = 1. If the multiplier is a primitive qth root of unity, then
one can conjugate f to the form f (z) = λz + O(z q+1 ) by a holomorphic change
of coordinates. Thus f q (z) = z + O(z q+1 ) has at least q petals. Generically
there are exactly q, but in general there may be p = kq altogether. These petals
fall into k orbits under the action of f .
Corollary 5.16 Every cycle of parabolic petals contains a critical point of f .
Proof. Otherwise f : U → U is a covering map. But from the local picture we
see U/f ∼
= C∗ . Thus U ∼
= C∗ or C, and neither of these spaces can embed in
the complement of the Julia set.
74
The snail lemma. For later use we record the following criterion for a fixedpoint to be parabolic.
Theorem 5.17 Let f have an indifferent fixed-point at z = 0, and suppose
b with f (U ) ⊂ U and f n (z) → 0 uniformly on compact
there is a domain U ⊂ C
′
subsets of U . Then f (0) = 1.
Intuitively, if f ′ (0) 6= 1, then U must wind around 0, like a snail shell;
then a short cross-cut for U forms a disk mapping properly into itself, showing
|f ′ (0)| < 1.
Proof. We can assume f is univalent on ∆. Let B ⊂ U be a ball and let K ⊂ U
be a compact connected set containing B and f (B). Since f n → 0 uniformly on
K, we can assume f n (K) ⊂ ∆ for all n, and thus f n |K is univalent for all n.
Suppose the multiplier λ = f ′ (0) 6= 1. Then d(f n (K), 0) = O(diam f n (K)),
for otherwise f n (K) would not be big enough to join f n (B) to f n+1 (B) ≈
λf n (B). By the Koebe distortion theorem, we also have d(f n (B), 0) = O(diam f n (B)).
Thus the visual size of f n (B) as seen from z = 0 is bounded below. But
then there is a universal N such that
hλi (f n (B)) : i = 1, . . . , N i
forms a necklace encircling z = 0. Once f n (B) is close enough to zero, f (z) ≈
λz, and therefore
hf n+i (B) : i = 1, . . . N i
also encircles z = 0. The union of these balls is in U , so there is a loop L ⊂ U
encircling zero. Since f n |L → 0 uniformly, the maximum principle implies that
f n → 0 uniformly on the disk enclosed by L. Therefore |f ′ (0)| < 1, contrary to
our assumption of indifference.
Therefore f ′ (0) = 1.
Irrationally indifferent case: λ = exp(2πiθ), θ ∈ R − Q.
First we remark that f may not be linearizable. This is not surprising since
a parabolic point is not linearizable (unless f has finite order), so a nearly
parabolic point should not be either. More concretely we have:
Theorem 5.18 There is a dense Gδ of multipliers λ ∈ S 1 such that f (z) =
λz + z 2 cannot be linearized near z = 0.
Proof. Note that
n
f n (z) − z = (λn − 1)z + a2 z 2 + · · · + z 2 .
Thus the product of the nonzero roots of f n (z) = z is λn − 1, and therefore f
has a periodic point pn with
n
|pn | ≤ |λn − 1|1/2 = rn .
The set of λ such that lim inf rn = 0 is a dense Gδ on S 1 (containing the roots
of unity), and for any such λ there are periodic points pnk → 0, so f is not
linearizable.
75
Theorem 5.19 There is a full-measure set of multipliers λ ∈ S 1 such that
f (z) = λz + z 2 can be linearized near z = 0.
Proof. Let fλ = λz + z 2 , let Uλ = {z : fλn (z) → 0}. For λ ∈ ∆∗ , let
φλ : Uλ → C be the linearizing map, normalized so that φ′λ (0) = 1. Finally,
noting that the critical value of fλ is at −λ2 /2, set
Rλ = φλ (−λ2 /2).
Next note that φ−1
λ admits a univalent branch defined on B(0, |Rλ |). By the
Koebe 1/4 theorem, this means Uλ ⊃ B(0, |Rλ |/4). But Uλ is bounded, so Rλ
is a bounded analytic function on ∆∗ (and indeed on ∆, since the singularity
at z = 0 is removable).
By a general result, from complex analysis, Rλ has nonzero radial limits at
almost every λ ∈ S 1 . Thus for almost every λ ∈ S 1 , there is a ball of positive
radius B(0, |Rλ |/4) contained in the Fatou set of fλ .
Thus the component U of Ω(fλ ) containing z = 0 is a nonempty disk, and
f : U → U satisfies |f ′ (0)| = 1. By the Schwarz lemma, f is an isometry in
the hyperbolic metric, the Riemann mapping (U, 0) → (∆, 0) conjugates f to a
rotation.
The above argument is from [Y, §II.2].
Conditions of Diophantus and Brjuno. Here is a more precise statement
about linearizing irrational multipliers. An irrational number θ is Diophantine
if there exist C, d > 0 such that
θ − p > C
q qd
for all rationals p/q. Almost every number is Diophantine, and Siegel showed
any holomorphic germ of the form f (z) = e2πiθ z + O(z 2 ) with θ Diophantine is
linearizable.
It is known that the set of θ for which f (z) = e2πiθ z + z 2 is linearizable is
exactly those satisfying the Brjuno condition:
X log qn+1
qn
< ∞,
where pn /qn are the continued fraction approximants of θ. See [Y] for details.
5.5
Classification of periodic regions
Theorem 5.20 (Classification of stable regions) A component Ω0 of period p in the Fatou set of a rational map f is of exactly one of the following five
types:
1. An attractive basin: there is a point x0 in Ω0 , fixed by f p , with 0 <
|(f p )′ (x0 )| < 1, attracting all points of Ω0 under iteration of f p .
76
2. A superattractive basin: as above, but x0 is a critical point of f p , so
(f p )′ (x0 ) = 0.
3. A parabolic basin: there is a point x0 in ∂Ω0 with (f p )′ (x0 ) = 1, attracting
all points of Ω0 .
4. A Siegel disk: Ω0 is conformally isomorphic to the unit disk, and f p acts
by an irrational rotation.
5. A Herman ring: Ω0 is isomorphic to an annulus, and f p acts again by an
irrational rotation.
\text{These have fundamental domains}
\text{parabolic basin}
\text{attractive basin}
\text{superattractive basin}
\text{Siegel disk}
\text{Herman ring}
\text{These have dynamically defined foliations}
Figure 15. The five types of stable regions.
Proof. Replacing f with f p , we can assume f maps Ω0 to itself. Then f is
non-expanding for the hyperbolic metric on Ω0 (which we denote by d(·)); that
is, d(f x, f y) ≤ d(x, y) for all x, y ∈ Ω0 .
Consider an arbitrary z ∈ Ω0 and its forward orbit zn = f n (z). Then
d(zn+1 , zn ) ≤ d(z1 , z0 ).
77
If zn → ∞ (meaning the orbit leaves every compact set of Ω0 ), then dCb (zn , zn+1 ) →
0, since the ratio of the spherical to hyperbolic metrics on Ω0 tends to zero at the
boundary. Thus the orbit accumulates on a connected set E ⊂ ∂Ω0 on which
f (z) = z. Since f is not the identity map, E reduces to a single fixed-point
E = {x0 }. Since x0 ∈ J(f ), it is an indifferent fixed-point, and f ′ (x0 ) = 1 by
the Snail Lemma (Theorem 5.17).
Now suppose zn is recurrent: that is, the orbit returns infinitely often to a
fixed compact set K ⊂ Ω0 . We distinguish two cases, depending on whether or
not f : Ω0 → Ω0 is a covering map.
If f is not a covering map, then |f ′ | < c < 1 on K (in the hyperbolic metric);
therefore d(zn , zn+1 ) → 0, and any accumulation point x0 of zn in K is a fixedpoint of f . By contraction, this fixed-point is unique, |f ′ (x0 )| < 1, and we have
the attracting or superattracting case.
If f is a covering map, then by recurrence there are self-coverings (of the
form f n ) arbitrarily close to the identity (on compact sets). More precisely, if
v0 is a unit tangent vector at z0 , vn = Df n (v0 ), and vk ≈ vk+n , then f n ≈ id
on a large ball about zk .
If Ω0 carries a nontrivial closed hyperbolic geodesic γ, then f n (γ) = γ for
arbitrarily large n. Since f n 6= id, we conclude that Ω0 is an annulus around γ
and f is an irrational rotation. This is the case of a Herman ring.
Finally if Ω0 carries no closed geodesics, then it must be a disk (it cannot
be a punctured disk since the Julia set is perfect). Then f |Ω0 is an irrational
rotation; any other isometry of infinite order would fail to be recurrent. This is
the case of a Siegel disk.
Cf. [McS].
5.6
The postcritical set
Although the Schwarz lemma gives contraction in the hyperbolic metric, it can
also be used to reveal expanding properties of rational maps.
Definition. The post-critical set is given by
P (f ) =
∞
[
[
f n (c).
n=1 f ′ (c)=0
Thus P (f ) is the smallest forward-invariant closed set containing the critical
values of f .
Once easily checks P (f ) = P (f n ) for any n ≥ 1, and |P (f )| ≤ 2 iff f (z) is
conjugate to z 7→ z d.
Setting the (easily analyzed) cases where f (z) = z d , we can assume |P (f )| ≥
b − P (f ) is hyperbolic (in the sense that each com3 and thus its complement C
ponent is hyperbolic).
78
Since f (P (f )) ⊂ P (f ), the pre-image of the post-critical set contains itself.
Thus we obtain the diagram:
b − f −1 P (f ) −−−ι−→ C
b − P (f )
C
fy
b − P (f )
C
where along the vertical arrow f is a covering map, and along the horizontal
b
arrow ι is an inclusion. Imposing the hyperbolic metric on C−P
(f ), we conclude
that the vertical arrow is an isometry, while the inclusion ι is non-expanding.
Thus the composition
b − P (f ) → C
b − P (f )
f ◦ ι−1 : C
is a non-expanding where it is defined.
Theorem 5.21 For any z ∈ J(f ), we have k(f n )′ (z)k → ∞ in the hyperbolic
b − P (f ).
metric on C
(If f n (z) happens to land in P (f ), we set k(f n )′ (z)k = ∞.)
b − f −n (P (f )) and
Proof. Let Xn = C
ιn : Xn ֒→ X0
the inclusion. Since |P (f )| ≥ 3, f −n (P (f )) accumulates on the Julia set, and
thus the hyperbolic metric on Xn at z ∈ J(f ) tends to infinity. In other words,
kι′n (z)k → 0 with respect to the hyperbolic metrics on domain and range. Since
f n : Xn → X0 is a covering map, we have k(f n )′ (z)k → ∞ with respect to the
hyperbolic metric on X0 .
Every periodic component of the Fatou set is related to the post-critical set.
More precisely:
Theorem 5.22 The post-critical set P (f ) contains every attracting, superattracting and parabolic cycle, every indifferent point in the Julia set, and the full
boundary of every Herman ring and Siegel disk.
Proof. Assume |P (f )| > 2, since the theorem clearly holds for f (z) = z d .
Consider any ball B = B(w, r) disjoint from P (f ). Then all branches of
f −n |B are well-defined and univalent on B. Moreover, these inverse branches
form a normal family, since they omit P (f ) from their range.
If w is a periodic point, of period p, then by normality its multiplier satisfies
|λ| ≥ 1. If |λ| = 1, then by univalence the forward iterates of f are also normal
near w, so w is the center of a Siegel disk. Summing up, any periodic point
outside P (f ) must be either repelling or the center of a Siegel disk.
79
Similarly, if w is in the boundary of a Siegel disk or Herman ring, we can
choose a subsequence of f −n |B that converges to the identity on an open subset
of B (namely its intersection with the rotation domain). Thus along a subsequence, f −n converges to the identity on all of B. Thus B contains no repelling
cycles, so B is disjoint from the Julia set, a contradiction.
5.7
Expanding rational maps
Definition. A rational map f (z) is expanding if for some n, the derivative of
f n in the spherical metric satisfies |(f n )′ (z)|σ > 1 for all z ∈ J(f ).
Theorem 5.23 The following are equivalent:
1. The rational map f is expanding.
2. P (f ) ∩ J(f ) = ∅.
3. The forward orbit of every critical point tends to an attracting cycle.
4. There are no critical points in the Julia set, and every point in the Fatou
set converges to an attracting cycle.
Here ‘attracting’ includes ‘superattracting’.
Proof. The maps f (z) = z d clearly satisfy all the above conditions, so we may
assume |P (f )| ≥ 3.
(1) =⇒ (4). By expansion, there is an r > 0 such that for any z ∈ Ω(f ),
supn d(f n (z), J(f )) > r. Since only finitely many components of Ω(f ) can contain a ball of radius r, we see the orbit of z eventually lands in a periodic component. Expansion rules out Siegel disks, Herman rings and parabolic basins,
so f n (z) must tend to an attracting cycle.
(4) =⇒ (3) =⇒ (2). These implications are immediate.
(2) =⇒ (1). By Theorem 5.21, under iteration f expands the hyperbolic
b − P (f ) at any point of J(f ). If P (f ) ∩ J(f ) is empty, then by commetric on C
pactness of J(f ), some fixed iterate f n strictly expands the hyperbolic metric
everywhere on J(f ). A further iterate f nk then expands the spherical metric,
since the spherical and hyperbolic metrics have a bounded ratio of J(f ).
Theorem 5.24 The Julia set of an expanding map is quasi-self-similar, and
H. dim J(f ) < 2.
Proof. By expansion and the distortion lemma for univalent maps, any small
piece of J(f ) can be blown up to definite size with bounded distortion. Thus
J(f ) is quasi-self-similar, and there is no ball in which J(f ) is very dense. It
follows that H. dim J(f ) < 2.
80
The preceding two results, taken together, completely determine the behavb under the iteration of an expanding map f . For
ior of a typical point z ∈ C
example we can now see:
Corollary 5.25 Suppose f (z) = z d + c has an attracting cycle C ⊂ C. Then
b either:
for any z ∈ C,
1. f n (z) → ∞; or
2. d(f n (z), C) → 0; or
3. z ∈ J(f ), a compact set of Hausdorff dimension < 2.
Proof. Since f has only two critical points, it has exactly two attracting cycles,
C and ∞. These cycles must each attract a critical point, so f is expanding.
Therefore every point in Ω(f ) tends to C or ∞, and the remaining points J(f )
have dimension less than two.
5.8
Density of expanding dynamics
We can now state a central conjecture:
Conjecture 5.26 For each d ≥ 2, the expanding maps are open and dense in
Ratd and in Polyd , the spaces of rational maps and polynomials of degree d.
Clearly the expanding maps form an open set, but their density is still unknown, even in the case of Poly2 (quadratic polynomials).
Recall from §1.3 that in the early history of smooth dynamical systems, it
was suspected that Axiom A systems (an analogue of expanding) should be
open and dense in Diff(M n ). This was soon proved to be false for all manifolds
of dimension n ≥ 3, and finally even for all surfaces.
For n = 1 Axiom A dynamics is trivially seen to be dense. There are
good reasons (both theoretical and experimental) to think that expanding maps
may be dense for conformal dynamical systems. The most naive reason is that
polynomials and rational maps are 1-dimensional dynamical systems over C.
5.9
Quasiconformal maps and vector fields
We now introduce a new technique.
Let f : U → V be a diffeomorphism between regions in C. Recall the
differential operators
∂f
1 ∂f
∂f
1 ∂f
∂f
∂f
,
.
=
−i
=
+i
∂z
2 ∂x
∂y
∂z
2 ∂x
∂y
These operators behave like differentiation with respect to the independent variables (z, z). For example,
f (z + t) = f (z) + t
∂f
∂f
+t
+ O(t2 ).
∂z
∂z
81
The map f is conformal iff ∂f /∂z = 0.
We say f is quasiconformal if for some 0 < k < 1, we have
∂f ≤ k ∂f .
∂z ∂z Noting that for |t| = 1,
|fz | − |fz | ≤ |tfz + tfz | ≤ |fz | + |fz |,
we see Df maps circles to ellipses of oblateness bounded by
K=
1+k
≥ 1;
1−k
we say f is K-quasiconformal and note that 1-quasiconformal mappings are
conformal.
The Jacobian determinant is given by the product of the maximum and
minimum stretchings:
det Df = (|fz | + |fz |)(|fz | − |fz |) = |fz |2 − |fz |2 .
We also have |fx |2 , |fy |2 ≤ K det Df . Thus for any region U ,
Z 2
Z
∂f 1
|dz|2 ,
det Df |dz|2 ≥
area(f (U )) =
K U ∂x U
and similarly for ∂f /∂y.
This suggest the more general definition: a homeomorphism f : U → V is
K-quasiconformal iff f has distributional first derivatives fx and fy (or fz and
fz ) in L2 , and Df (z) is K-quasiconformal for almost every z.
The distortion of a general quasiconformal map is measured by the complex
dilatation
∂f
dz
=
.
µ = µ(z)
dz
∂f
This Beltrami differential µ is a measurable (−1, 1)-form, so its absolute value
is natural, and we have
kµk∞ ≤ k =
K −1
< 1.
K +1
The space of complex structures. Here is a more intrinsic discussion of the
Beltrami differential. For any Riemann surface X, we let M (X) be the space of
L∞ Beltrami differentials, equipped with the sup-norm. We claim the unit ball
in M (X) is naturally identified with the space of complex structures on X at a
bounded distance form the given structure.
To see this, recall that the space of conformal structures on a 2-dimensional
real vector space V is SL(V )/ SO(V ) ∼
= H. Thus the space of complex structures
on a surface S is naturally a bundle of hyperbolic disks CS = SL(T S)/ SO(T S).
82
On a Riemann surface X, this bundle comes equipped with a section s, so
we have a bundle of pointed hyperbolic disks. The associated bundle of tangent
spaces, Ts CX, is naturally isomorphic to the Beltrami line bundle T −1,1 X.
Then CX is naturally realized as the space of unit disks in the Beltrami line
bundle, and a Beltrami differential with |µ| < 1 is simply a measurable section
of this bundle of unit disks, at a bounded hyperbolic distance from the zero
section.
The Beltrami differential as a connection. A complex structure is the
same as a ∂-operator on functions, and we can also associate to µ the operator
∂ µ = ∂ − µ∂
to specify the Riemann surface (X, µ).
Complex structures and self-adjoint maps. Alternatively, given a pair of
a complex structures J1 , J2 on V , there is a unique map A : V → V such that
(i) A is positive with respect to J1 (i.e. A has a set of positive eigenvectors,
orthogonal with respect to J1 );
(ii) A∗ (J2 ) = J1 (i.e. J1 = A−1 J2 A); and
(iii) det(A) = 1.
Thus we can identify C(V ) with the space P (V, J1 ) ⊂ SL(V ) of positive endomorphisms of determinant one.
Now consider the special case where V = C with its standard conformal
structure. Then a R-linear map A : C → C given by
A(z) = az + bz
is self-adjoint iff a ∈ R. When self-adjoint, its eigenvalues are a ± |b|. Thus A is
positive iff we have a ∈ R and a > |b|.
Now return to the setting of a Riemann surface X. A Beltrami differential
µ ∈ Tp−1,1 X with |µ| < 1 determines a positive map A : Tp X → Tp X by
A(v) =
1 + µ(v)
· v.
1 − |µ|2
This map A ∈ P (Tp X, Jp ) corresponds canonically to the complex structure
determined by µ. For example, if µ = a dz/dz on C, then under the identification
Tp C = C we have µ(ξ) = aξ/ξ and
A(ξ) =
ξ + aξ
·
1 − |a|2
When a is real, the eigendirection of A are along the real and imaginary axes.
In general, they correspond to the lines along which µ(v) > 0 and µ(v) < 0.
Note: if |µ(p)| = 1, the unnormalized map A(v) = (1 + µ(v)) · v has rank
one, so its kernel determines a real line Lp ⊂ Tp X.
83
Theorem 5.27 (Measurable Riemann mapping theorem) For any µ ∈
b with kµk∞ < 1, there is a unique quasiconformal homeomorphism f :
M (C)
b
b such that fz = µfz and f fixes {0, 1, ∞}.
C→C
Moreover, the mapping ft (z) with dilatation tµ, t ∈ ∆, varies holomorphically with respect to t.
The first statement is due to Morrey; the second is due to Ahlfors and
Bers. Bers also introduced the use of the Beltrami equation in the theory of
deformations of Kleinian groups.
Examples.
1. For |α| < 1 let
f (z) =
(
z + αz,
z + α/z
|z| ≤ 1,
otherwise.
Then fz /fz = α on the unit disk and zero elsewhere. The mapping f is
K-quasiconformal with K = (1 + |α|)/(1 − |α|).
2. For 1 > α > 0 let f (z) = z|z|α−1 . In polar coordinates we have f (reiθ ) =
rα eiθ .
Writing f (z) = z (α+1)/2 z (α−1)/2 , we can easily compute
µ=
(α − 1) z
fz
=
.
fz
(α + 1) z
Thus f is K-quasiconformal with K = 1/α.
Note that f is only α-Hölder continuous at the origin. It is a general fact
that a K-quasiconformal map is 1/K-Hölder continuous.
Distortion of balls. An alternative definition of K-quasiconformal mappings
f is that
maxS 1 (z,r) |f (z) − f (w)|
H(z) = lim sup
≤K
minS 1 (z,r) |f (z) − f (w)|
r→0
for almost every z. Thus roughly speaking, the ratio of inradius to outradius of
the image of a ball is bounded by K.
This sharp bound on distortion of balls holds only a.e., and only at a microscopic level. For example, the K-quasiconformal map f (reiθ ) = rK eiθ sends the
ball B(1, 1) to a region U containing [0, 2K ]. The ratio of inradius to outradius
of U at z = 1 is about 2K ≫ K when K is large.
The distortion of macroscopic balls under f is bounded in terms of K(f );
it’s just that the best bound is not K.
Vector fields. A vector field v(z)∂/∂z is quasiconformal if its Beltrami differential µ = ∂v is in L∞ as a distribution. A quasiconformal vector field is
continuous; in fact v ∈ C 1−ǫ for any ǫ > 0.
For many purposes we can get by with the infinitesimal form of the Measurable Riemann Mapping Theorem.
84
b there is a conTheorem 5.28 (Infinitesimal version) For any µ ∈ M (C),
tinuous vector field v on the sphere such that ∂v = µ.
For the proof we recall that 1/(πz) is a fundamental solution to the ∂equation; that is, (1/z)z = πδ, a multiple of the δ-function at z = 0.
To see this, consider any f ∈ C0∞ (C). In terms of the pairing between
smooth functions and distributions, we have
Z
Z
∂ 1
1 ∂f
f (z)
h(1/z)z , f i =
|dz|2 = −
|dz|2
∂z
z
z
∂z
C
Z
Z
Z 1
−1
1 ∂f
dz
1
f (z) dz
dz ∧ dz =
∧ ∂f =
=
d
2i
z ∂z
2i
z
2i
z
Z
1
1
dz
= lim
=
2πif (0) = πf (0) = hπδ, f i,
f (z)
r→0 2i S 1 (r)
z
2i
and thus (1/z)z = −πδ.
Proof of Theorem 5.28. It suffices to handle the case where µ is compactly
supported in C, since up to the action of Aut(C) any Beltrami differential is a
sum of two of this form.
To prove the theorem for compactly supported µ, just let v(z) be the convolution of µ with the fundamental solution −1/(πz) the ∂ equation.
Since 1/z is in L1 on compact sets, it is easy to see directly that v is continuous. In fact v is C 1−ǫ for any ǫ > 0.
Examples. Given complex numbers (a1 , . . . , an ), let
n
X
kak z k−1 , |z| ≤ 1,
µ(z) =
1
0
otherwise.
Then ∂v = µ where
v =
X
n
ak z k , |z| ≤ 1,
1
n
X
1
ak k
z
1
|z| > 1.
Trivial deformations. A Beltrami differential µ ∈ M (∆) is trivial if there is
a solution to ∂v = µ such that v = 0 on S 1 .
Using the preceding examples we can see:
Proposition 5.29 There exists an infinite-dimensional space of compactly supported Beltrami differentials V ⊂ M (∆) such that µ ∈ V is trivial iff µ = 0.
85
Proof. Let V be the span of hz k dz/dz : k ≥ 0i. Suppose µ ∈ V is trivial;
that is, there is a solution to ∂w = µ with w = 0 on S 1 . Let v be the solution
to ∂v = µ given in the example above. Then ∂(v − w) = 0 and thus v − w is
holomorphic on the disk. Since w = 0 on S 1 , we see v|S 1 admits a holomorphic
extension to the unit disk. But v|S 1 is a polynomial in negative powers of z, so
we conclude v = 0. Therefore µ = 0.
To obtain compact support, restrict the elements of V to the ball B(0, 1/2).
If ∂v = µ ∈ V , then v = 0 on |z| = 1 and so v = 0 on |z| = 1/2, since v is
holomorphic on 1/2 < |z| < 1. Then µ = 0 by the argument above.
For applications we need to recognize triviality from the behavior of a solution to ∂v = µ on the sphere. This recognition is provided by:
b and let
Theorem 5.30 Let v be a quasiconformal vector field on C,
b
π:∆→Ω⊂C
be a Riemann mapping to a disk. Suppose µ = ∂v|Ω is compactly supported,
and v = 0 on ∂Ω. Then π ∗ (v) = 0 on ∂∆, and π ∗ (µ) is trivial in M (∆).
Proof. Write v = v(z)(∂/∂z). Then v(z) is holomorphic outside a compact
subset of Ω, and v(z) = 0 on ∂Ω. Therefore
π ∗ (v) =
w(z) ∂
v(π(z)) ∂
= ′
π ′ (z) ∂z
π (z) ∂z
with w(z) holomorphic outside a compact subset of ∆, and w(z) → 0 on ∂∆.
By Schwarz reflection, w(z) is identically zero near the boundary of ∆, and thus
π ∗ (v) is a compactly supported vector field in ∆. Since ∂π ∗ (v) = π ∗ (µ), we find
µ is trivial in M (∆).
5.10
Deformations of rational maps
We now explain how f -invariant Beltrami differentials determine deformations
of f .
Conformal deformations. The space Ratd of all rational maps of degree d is a
complex manifold, isomorphic to an open subset of P2d+1 . (If f (z) = P (z)/Q(z),
then deg(P ), deg(Q) ≤ d so we have 2d + 2 coefficients, giving homogeneous
coordinates on projective space. The condition that P and Q are relatively
prime, and at least one is of degree d, determines a Zariski open subset.)
Suppose a rational map f0 (z) varies smoothly in a family ft (z). Then the
derivative w = dft (z)/dt is a vector field whose value w(z) lies in the tangent
b In other words, w is a holomorphic section of the bundle f ∗ (T C).
b
space Tf (z) C.
Thus
b f ∗ (T C)).
b
Tf Ratd = Γ(C,
86
The pullback of the tangent bundle has degree 2d, so it is isomorphic to
O(2d), and thus
dim Tf Ratd = 2d + 1,
consistent with our description of Ratd as an open subset of P2d+1 .
b gives a deformation of f iff
A continuous vector field v on C
δv = Df (v) − v ◦ f
b Since
is a holomorphic section of f ∗ (T C).
∂δv = f∗ µ − µ ◦ f,
we see v gives a deformation iff µ = ∂v is f -invariant, i.e. f ∗ µ = µ.
The deformation produced by v can be interpreted as dft /dt, where
ft = φ−1
t ◦ f φt
b with dφt /dt = v. Thus deformations give directions in
for a isotopy φt of C
which f is (formally) varying by conjugacy.
In particular, we should only expect the full tangent Tf Ratd to be spanned
by deformations when f is structurally stable.
A 3-dimensional subspace of deformations arises from the action of PSL2 (C)
on Ratd by conjugation. Namely, if v ∈ sl2 (C) is a holomorphic vector field on
the sphere, then δv is clearly holomorphic.
A trivial deformation is a vector field with δv = 0, which is equivalent to the
condition f ∗ (v) = v. If f (z) = z and f ′ (z) 6= 1, we can conclude that f (v) = 0.
Applying the same reasoning to the repelling periodic points, by continuity of
v we have:
Proposition 5.31 If a continuous vector field v gives a trivial deformation of
f , then v vanishes identically on the Julia set of f .
Corollary 5.32 If v is holomorphic and δv = 0 then v = 0.
Intuitively, the Proposition says that a small deformation commuting with f
fixes the repelling cycles, and so it is the identity on the Julia set. The Corollary
says the group Aut(f ) of Möbius transformations commuting with f is discrete.
(In fact Aut(f ) is finite.)
Because of this Corollary, sl2 (C) maps injectively into the space of deformation of f . Taking the quotient, we obtain the ‘cohomology group’
b = H 0 (C,
b f ∗ (TC))/sl
b
H 1 (f, TC)
2 (C).
This group measures deformations modulo those that come from conformal conjugacy. It is naturally the tangent space at f to the variety Vd = Ratd / PSL2 (C).
We have
b = 2d − 2.
dim H 1 (f, TC)
87
b f ⊂ M (C)
b be the space of f Quasiconformal deformations. Let M (C)
invariant Beltrami differentials, i.e. those satisfying f ∗ (µ) = µ. Each invariant
b with respect to which f is
µ determines an almost-complex structure on C
b f = ∞. For example, if an open set U is
holomorphic. Usually dim M (C)
disjoint from its forward images, and f n |U is injective, then we can propagate
any µ ∈ M (U ) to an f -invariant differential on the sphere, and thus M (U ) ֒→
b f.
M (C)
We have a natural map
b f → H 1 (f, TC)
b
δ : M (C)
defined as follows: given an f -invariant µ, solve the equation ∂v = µ and then
map µ to the deformation δv. The solution to the ∂-equation is only well-defined
up to elements of sl2 (C), which is why the image lies in the cohomology group.
b f determines a 1-parameter family of
To under δ, note that µ ∈ M (C)
quasiconformal maps φt with complex dilatation tµ. The rational maps ft =
φt ◦ f ◦ φt−1 vary holomorphically with respect to t, and by differentiating at
t = 0 we obtain the deformation [dft /dt] = δµ.
5.11
No wandering domains
Using the fact that a rational map admits only a finite-dimensional space of
deformations, we can finally prove:
Theorem 5.33 (No wandering domains) Every component of the Fatou set
eventually cycles.
We begin with an observation due to N. Baker.
Lemma 5.34 If Ω(f ) has a wandering domain, then it has a wandering disk.
Proof. Let U be a wandering component of Ω(f ), and let Un = f n (U ) be its
distinct forward images (each a component of Ω(f )). Since f has just finitely
many critical values, f : Un → Un+1 is a covering map, hence a hyperbolic
isometry, for all n ≫ 0.
We claim Un is a disk for all n ≫ 0. Otherwise, for all n ≫ 0, Un carries
a hyperbolic geodesic γn such that f (γn ) = γn+1 . (Note that Un cannot be a
punctured disk because J(f ) is perfect.) Since f is a covering, the length of γn
in the hyperbolic metric on Un is the same for all n ≫ 0. Now the diameter
of the largest spherical ball contained in Un must tend to zero, since these
components are distinct. By comparing the hyperbolic and spherical metrics,
we see diamσ (γn ) → 0. Since f is Lipschitz in the spherical metric, once the
spherical size of γn is small, any small disk bounded by γn must map to a small
disk bounded by γn+1 . It follows that f n+i is normal on this small disk, which
b − γn must meet J(f ). Thus Un is
is impossible since each component of C
eventually a disk.
88
Proof of Theorem 5.33. Let U be a wandering disk, or more precisely a
simply-connected component of Ω(f ) such that f n |U is injective for all n > 0.
Let π : ∆ → U be a Riemann mapping. Then π allows us to transfer Beltrami
differentials from ∆ to U . Let V ⊂ M (∆) be the infinite-dimensional space
of compactly supported Beltrami differentials guaranteed by Proposition 5.29,
such that µ ∈ V is trivial iff µ = 0. Then we have
π
∗
δ
b
b f →
H 1 (f, TC).
V ⊂ M (∆) ∼
= M (U ) ֒→ M (C)
b Then the associated vector
Now suppose µ ∈ V maps to 0 ∈ H 1 (f, TC).
field v vanishes on J(f ), and in particular v = 0 on ∂U . By Theorem 5.30, this
implies µ is a trivial deformation of the disk, and thus µ = 0.
b =
Thus V maps injectively into Tf (Ratd ). But dim(V ) = ∞ > dim H1 (f, TC)
2d − 2, so this is impossible. Therefore f has no wandering domain.
5.12
Finiteness of periodic regions
Theorem 5.35 Every component of the Fatou set Ω(f ) eventually cycles, and
there are only finitely many periodic components.
Proof. We have seen there are no wandering domains. Apart from Herman
rings, the periodic components of Ω(f ) are associated to superattracting, attracting, parabolic or indifferent periodic points, so they are finite in number.
For Herman rings, one can use the quasiconformal deformation theory to
show each cycle of rings contributes one complex parameter to the moduli space
of f . Since dim M(f ) ≤ 2d − 2, there are at most 2d − 2 Herman rings.
Remarks. More sophisticated arguments show the number of cycles of components of the Fatou set is at most 2d − 2 [Shi].
5.13
The Teichmüller space of a dynamical system
In preparation to discuss the Teichmüller space of a rational map, we outline
the more general theory of the Teichmüller space of a dynamical system.
Definitions. A holomorphic dynamical system (X, f ) consists of a 1-dimensional
complex manifold X, possibly disconnected, and a holomorphic map f : X → X.
(The definition can be extended in a natural way to replace f by a group action
or a semigroup or a collection of holomorphic correspondences.)
An isomorphism α : (X1 , g1 ) → (X2 , g2 ) is given by a conformal map α :
X1 → X2 such that α ◦ g1 = g2 ◦ α.
A quasiconformal conjugacy φ : (X, f ) → (Y, g) gives a marking of (Y, g)
by (X, f ). Two such marked dynamical systems are isomorphic if there is an
isomorphism α : (Y1 , g1 ) → (Y2 , g2 ) respecting markings (i.e. such that φ2 =
α ◦ φ1 ).
89
The deformation space Def(X, f ) is the space of isomorphism classes of dynamical systems marked by (X, f ). It is easy to see the deformation space may
be identified with the unit ball in the space of f -invariant Beltrami differentials;
that is, we have:
Def(X, f ) = M (X)f1 .
The quasiconformal conjugacies φ : (X, f ) → (X, f ) form a group we denote
QC(X, f ). It acts on Def(X, f ) by changing the marking. The normal subgroup
QC0 (X, f ) consists of quasiconformal conjugacies isotopic to the identity, rel the
ideal boundary of X and through uniformly quasiconformal conjugacies.
The Teichmüller space Teich(X, f ) is the quotient space of dynamical systems marked up to isotopy:
Teich(X, f ) = Def(X, f )/ QC0 (X, f ).
The mapping-class group
Mod(X, f ) = QC(X, f )/ QC0 (X, f )
acts on Teichmüller space, yielding as quotient the moduli space
M(X, f ) = Teich(X, f )/ Mod(X, f )
of isomorphism classes of dynamical systems quasiconformally conjugate to f .
The subgroup of conformal conjugacies will be denoted Aut(X, f ) ⊂ QC(X, f ).
Its image in Mod(X, f ) coincides with the stabilizer of [(X, f )] ∈ Teich(X, f ).
Rotation of an annulus. To make these ideas concrete, let us consider the
Teichmüller space of (X, f ) = (A(R), f ), where A(R) = {1 < |z| < R} is the
standard annulus of modulus log(R)/2π, and
f (z) = e2πiα z
is an irrational rotation.
1. We have Aut(X, f ) = S 1 acting by rotations. Moreover, the dynamical
system generated by f is dense S 1 .
2. The space Def(X, f ) = M (A(R))f1 can be identified with L∞ ([1, R])1 . Indeed, any f -invariant Beltrami differential µ on A(R) is also S 1 -invariant,
by ergodicity of the irrational rotation of a circle. Thus µ is determined
by its values on the radius [1, R].
3. In terms of marked dynamical systems, Def(X, f ) can be identified with
the set of triples (Y, g, φ) = (A(S), f, φ) such that φ : A(R) → A(S) is an
S 1 -equivariant quasiconformal map and
φ|S 1 (1) = id .
To see this, just note that any Riemann surface Y quasiconformally equivalent to X is of the form A(S), that the rotation number of f is a topological invariant, and that by composing with an automorphism of A(S)
we can normalize the conjugacy so that φ(1) = 1.
90
4. The group QC(X, f ) consists of all quasiconformal maps φ : A(R) → A(R)
that commute with rotations. It is conveniently to visualize the orbits of
S 1 on A(R) as circles of constant radius in the cylinderical metric |dz|/|z|;
then φ preserves this foliation and maps leaves to leaves by isometries.
Any φ ∈ QC(X, f ) is actually Lipschitz and is determined by its values
on [1, R]. Thus φ has the form
φ(z) = e2πiθ(|z|) · z,
where θ : [1, R] → C is a Lipschitz function such that θ(1) and θ(R) are
real. Note that θ and θ + n, n ∈ Z, determine the same map φ.
Moreover, the condition that φ as above is quasiconformal is equivalent
to the condition that θ is Lipschitz and r 7→ |φ(r)| = r exp(2π Im θ(r)) is
a bilipschitz map. In other words, if we write θ(r) = α(r) + iβ(r) then we
need α and β to be Lipschitz and we need a definite gap betwen 1/r and
2πβ ′ (r); that is, we need
inf ((1/r) − 2πβ ′ (r)) > 0
r
to insure |φ(r)| increases at a definite rate.
5. The group QC0 (X, f ) consists of those φ that can be deformed to the
identity while keeping the values of φ on S 1 (1) and S 1 (R) fixed. This
means that φ is the identity on ∂A(R) and moreover that there is no
relative twisting. In terms of θ(r), the condition φ ∈ QC0 (R) is equivalent
to the condition
θ(0) = θ(R) ∈ Z.
6. A linear combination of Lipschitz functions is again Lipschitz. Using this
fact, it is easy to see that the map φ 7→ (θ(1), θ(R)) gives an isomorphism
Mod(X, f ) = QC(X, f )/ QC0 (X, f ) ∼
= R2 /Z,
where Z = {(n, n) ∈ R2 }.
7. Now we have seen that points (A(S), f, φ) ∈ Def(X, f ) can be normalized
so that φ(1) = 1, i.e. such that θ(1) = 0. Therefore φ is determined up to
isotopy (rel ideal boundary) by the value of θ(R) ∈ R. Thus the map
(A(S), f, φ)
7→ −(log φ(R))/2πi
= θ(R) + i mod(A(S))
establishes an isomorphism
Teich(X, f ) ∼
= H.
It can be verified that this isomorphism is complex-analytic.
91
8. Finally Mod(X, f ) = (R2 /Z) acts on Teich(X, f ) by changing the boundary values of φ. This actions is on z ∈ H given by:
(s, t)(z) = z + (t − s).
Note that any point z ∈ H is stabilized by the diagonal subgroup R/Z ∼
=
S 1 ⊂ R2 /Z, consistent with the fact that Aut(Y, f ) = S 1 for every (Y, f ) ∈
Teich(X, f ).
9. Taking the quotient by the group of all translations of H, we find the map
(Y, g) 7→ mod(Y ) (or equivalently z 7→ Im z) gives an isomorphism
M(X, f ) = Teich(X, f )/ Mod(X, f ) ∼
= R+ = (0, ∞).
In other words, the rotations of an annulus Y through irrational angle θ
are classified up to conjugacy by mod(Y ).
Attracting fixed-points. As a second example that is important for the
theory of attracting fixed-points, let (X, f ) = (C, f ) where
f (z) = λz
with 0 < |λ| < 1. For this map, a central role in the Teichmüller theory is
placed by the quotient torus T = C∗ /hf i.
1. The automorphism group of (C, f ) is the multiplicative group C∗ .
2. The space Def(X, f ) is naturally identified with M (T )1 . (Invariant Beltrami differential come from the quotient T .) An invariant Beltrami differential is determined by its values in the fundamental annulus |λ| < |z| < 1.
3. In terms of dynamical systems, any (Y, g, φ) ∈ Def(X, f ) has the form
(Y, g) = (C, κz) with 0 < |κ| < 1. The map φ can be normalized so that
φ(1) = 1.
4. The dynamical system (Y, g) has its own quotient torus T ′ = C∗ /hκi,
naturally marked by φ, giving an isomorphism
Teich(X, f ) ∼
= Teich(T ) ∼
= H.
In terms of (Y, g) = (C, κz), this isomorphism is given by
(C, κz) 7→
log κ
∈ H.
2πi
The value of log κ can be made well-defined using the marking of (Y, g) by
(X, f ). To use the marking, first choose an arc γ ⊂ X = C∗ connecting 1
to λ. Then φ(γ) ⊂ Y connects 1 to κ. There is a unique continous branch
of the logarithm along φ(γ) with log(1) = 0, and this branch defines log κ.
92
5. The torus T has a distinguished map π1 (T ) → Z defining the covering
space X = C∗ → T . In other words, T has a distinguished cohomology
class C ∈ H 1 (T, Z). It is not hard to see that Mod(X, f ) ∼
= Z coincides
with the subgroup of Mod(T ) ∼
= SL2 (Z) stabilizing C. Thus we have the
isomorphism
!
1
n
∈ SL2 (Z)}.
Mod(X, f ) ∼
={
=Z∼
0 1
6. The modular group acts on H in the natural way — by sending z to z + n.
Thus we have
M(X, f ) ∼
= ∆∗ .
= H/Z ∼
This isomorphism simply sends (C∗ , κz) to κ.
7. In summary, the Teichmüller space of an attracting fixed-point coincides
with the Teichmüller space of its quotient torus; the torus carries a distinguished cohomology class; a marking determines a logarithmic lift of the
multiplier; and the moduli space is the punctured disk.
5.14
The Teichmüller space of a rational map
We are now in a position to describe the space of all rational maps quasiconformally conjugate to a given one. See [McS] for details.
The quotient Riemann surface. To relate Teich(f ) to more traditional
Teichmüller spaces, we introduce a quotient Riemann surface for f .
The grand orbits of f are the equivalence classes of the relation x ∼ y if
f n (x) = f m (y) for some n, m ≥ 0. Let Jb denote the closure of the grand orbits
b − Jb ⊂ Ω. Then
of all periodic points and all critical points of f . Let Fb = C
f : Fb → Fb is a covering map without periodic points. Let Fb = Ωdis ⊔ Ωfol
denote the partition into open sets where the grand orbit equivalence relation
is discrete and where it is indiscrete.
Theorem 5.36 The Teichmüller space of a rational map f of degree d is naturally isomorphic to
M1 (J, f ) × Teich(Ωfol , f ) × Teich(Ωdis /f ),
where Ωdis /f is a complex manifold.
Here M1 (J, f ) denotes the unit ball in the space of f -invariant Beltrami
differentials on J. In particular, M1 (J, f ) = 0 if the Julia set has measure zero.
Proof. Since Jb contains a dense countable dynamically distinguished subset,
b f ), and so
ω|Jb = id for all ω ∈ QC (C,
0
b f ) = QC (Ωfol , f ) × QC (Ωdis , f ).
QC0 (C,
0
0
93
This implies the theorem with the last factor replaced by Teich(Ωdis , f ), using
the fact that JS and Jb differ by a set of measure zero. To complete the proof,
write Ωdis as Ωdis
i , a disjoint union of totally invariant open sets such that
each quotient Ωdis
i /f is connected. Then we have
Teich(Ωdis , f ) =
Y′
Teich(Ωdis
i , f) =
Y′
dis
Teich(Ωdis
i /f ) = Teich(Ω /f ).
Note that Ωdis /f is a complex manifold (rather than an orbifold), because f |Ωdis
has no periodic points.
The dimension of the Teichmüller space of a rational map of degree d is at
b
most 2d − 2, i.e. at most the dimension of Ratd / Aut C.
Next we give a more concrete description of the factors appearing in Theorem
5.36.
By the classification of stable regions, it is easy to see that Jb is the union of:
1. The Julia set of f ;
2. The grand orbits of the attracting and superattracting cycles and the
centers of Siegel disks (a countable set);
3. The grand orbits of the critical points that land in attracting and parabolic
basins (a countable set); and
4. The leaves of the canonical foliations which meet the grand orbit of the
critical points (a countable union of one-dimensional sets).
The superattracting basins, Siegel disks and Herman rings of a rational map
are canonical foliated by the components of the closures of the grand orbits. In
the Siegel disks, Herman rings, and near the superattracting cycles, the leaves
of this foliation are real-analytic circles. In general countably many leaves may
be singular. Thus Ωdis contains the points which eventually land in attracting
or parabolic basins, while Ωfol contains those which land in Siegel disks, Herman
rings and superattracting basins.
Theorem 5.37 The quotient space Ωdis /f is a finite union of Riemann surfaces, one for each cycle of attractive or parabolic components of the Fatou set
of f .
An attractive basin contributes an n-times punctured torus to Ωdis /f , while
a parabolic basin contributes an (n + 2)-times punctured sphere, where n ≥ 1 is
the number of grand orbits of critical points landing in the corresponding basin.
Proof. Every component of Ωdis is preperiodic, so every component X of Ωdis /f
can be represented as the quotient Y /f p , where Y is obtained from a parabolic
or attractive basin U of period p be removing the grand orbits of critical points
and periodic points.
94
First suppose U is attractive. Let x be the attracting fixed point of f p in U ,
and let λ = (f p )′ (x). After a conformal conjugacy if necessary, we can assume
x ∈ C. Then by classical results, there is a holomorphic linearizing map
ψ(z) = lim λ−n (f pn (z) − x)
mapping U onto C, injective near x and satisfying ψ(f p (z)) = λ(ψ(z)).
Let U ′ be the complement in U of the grand orbit of x. Then the space of
grand orbits in U ′ is isomorphic to C∗ / < z 7→ λz >, a complex torus. Deleting
the points corresponding to critical orbits in U ′ , we obtain Y /f p .
Now suppose U is parabolic. Then there is a similar map ψ : U → C such
that ψ(f p (z)) = z + 1, exhibiting C as the small orbit quotient of U . Thus the
space of grand orbits in U is the infinite cylinder C/ < z 7→ z + 1 >∼
= C∗ . Again
deleting the points corresponding to critical orbits in U , we obtain Y /f p .
In both cases, the number n of critical orbits to be deleted is at least one,
since the immediate basin of an attracting or parabolic cycle always contains
a critical point. Thus the number of components of Ωdis /f is bounded by the
number of critical points, namely 2d − 2.
For a detailed development of attracting and parabolic fixed points, see e.g.
[CG, Chapter II].
Definitions. A critical point is acyclic if its forward orbit is infinite. Two
points x and y in the Fatou set are in the same foliated equivalence class if the
closures of their grand orbits agree. For example, if x and y are on the same
leaf of the canonical foliation of a Siegel disk, then they lie in a single foliated
equivalence class. On the other hand, if x and y belong to an attracting or
parabolic basin, then to lie in the same foliated equivalence class they must
have the same grand orbit.
Theorem 5.38 The space Teich(Ωfol , f ) is a finite-dimensional polydisk, whose
dimension is given by the number of cycles of Herman rings plus the number
of foliated equivalence classes of acyclic critical points landing in Siegel disks,
Herman rings or superattracting basins.
S
Proof. As for Ωdis , we can write Ωfol = Ωfol
i , a disjoint union of totally
invariant open sets such that Ωfol
/f
is
connected
for each i. Then
i
Y′
Teich(Ωfol , f ) =
Teich(Ωfol
i , f ).
Each factor on the right is either a complex disk or trivial. Each disk factor
b f ), so by finiteness of the space of rational maps the
can be lifted to Def(C,
number of disk factors is finite. A disk factor arises whenever Ωfol
has an
i
annular component. A cycle of foliated regions with n critical leaves gives n
periodic annuli in the Siegel disk case, n + 1 in the case of a Herman ring, and
n wandering annuli in the superattracting case. If two critical points account
for the same leaf, then they lie in the same foliated equivalence class.
95
Definition. An invariant line field on a positive-measure totally invariant
b
subset E of the Julia set is the choice of a real 1-dimensional subspace Le ⊂ Te C,
varying measurably with respect to e ∈ E, such that f ′ transforms Le to Lf (e)
for almost every e ∈ E.
Equivalently, an invariant line field is given by a measurable Beltrami differential µ supported on E with |µ| = 1, such that f ∗ µ = µ. The correspondence
b : µ(v) = 1 or v = 0}.
is given by Le = {v ∈ Te C
Theorem 5.39 The space M1 (J, f ) is a finite-dimensional polydisk, whose dimension is equal to the number of ergodic components of the maximal measurable
subset of J carrying an invariant line field.
Corollary 5.40 On the Julia set there are finitely many positive measure ergodic components outside of which the action of the tangent map of f is irreducible.
Theorem 5.41 (Number of moduli) The dimension of the Teichmüller space
of a rational map is given by n = nAC + nHR + nLF − nP , where
• nAC is the number of foliated equivalence classes of acyclic critical points
in the Fatou set,
• nHR is the number of cycles of Herman rings,
• nLF is the number of ergodic line fields on the Julia set, and
• nP is the number of cycles of parabolic basins.
Proof. The Teichmüller space of an n-times punctured torus has dimension
n, while that of an n + 2-times punctured sphere has dimension n − 1. Thus
the dimension of Teich(Ωdis /f ) is equal to the number of grand orbits of acyclic
critical points in Ωdis , minus nP . We have just seen the number of remaining
acyclic critical orbits (up to foliated equivalence), plus nHR , gives the dimension
of Teich(Ωfol , f ). Finally nLF is the dimension of M1 (J, f ).
Remark. The number nP can exceed the number of parabolic cycles. For
example, a parabolic fixed point can have many petals attached, and these
petals may fall into several distinct cycles under the dynamics.
5.15
The modular group of a rational map
b f ) = QC(C,
b f )/ QC (C,
b f ) is the group of quasiconformal
Recall that Mod(C,
0
automorphisms of f , modulo those isotopic (through conjugacies) to the identity.
In this section we will prove:
b f)
Theorem 5.42 (Discreteness of the modular group) The group Mod(C,
b f ).
acts properly discontinuously by holomorphic automorphisms of Teich(C,
96
Proof of Theorem 5.42 (Discreteness of the modular group). The
b f ) acts isometrically on the finite-dimensional complex manigroup Mod(C,
b
fold Teich(C, f ) with respect to the Teichmüller metric. The stabilizer of a
b g) is isomorphic to Aut(g) and hence finite; thus the quotient of
point ([φ], C,
b f ) by a finite group acts faithfully. By compactness of quasiconforMod(C,
b f ) maps to a closed subgroup of
mal maps with bounded dilatation, Mod(C,
b
b f ) has positive
the isometry group; thus Mod(C, f ) is a Lie group. If Mod(C,
b f ) of inequivalent markings of f in Tedimension, then there is an arc (φt , C,
ichmüller space; but such an arc can be lifted to the deformation space, which
implies each φt is in QC0 (f ), a contradiction.
b f ) is discrete.
Therefore Mod(C,
Remark. Equivalently, we have shown that for any K > 1, there are only a
finite number of non-isotopic quasiconformal automorphisms of f with dilatation
less than K.
b → C
b of degree d.
Let Ratd denote the space of all rational maps f : C
This space can be realized as the complement of a hypersurface in projective
space P2d+1 by considering f (z) = p(z)/q(z) where p and q are relatively prime
b acts
polynomials of degree d in z. The group of Möbius transformations Aut(C)
on Ratd by sending f to its conformal conjugates.
A complex orbifold is a space which is locally a complex manifold divided by
a finite group of complex automorphisms.
Corollary 5.43 (Uniformization of conjugacy classes) There is a natural
holomorphic injection of complex orbifolds
b f )/ Mod(C,
b f ) → Ratd / Aut(C)
b
Teich(C,
parameterizing the rational maps g quasiconformal conjugate to f .
Corollary 5.44 If the Julia set of a rational map is the full sphere, then the
b f ) maps with finite kernel into a discrete subgroup of P SL2 (R)n ⋉
group Mod(C,
Sn (the automorphism group of the polydisk).
Proof. The Teichmüller space of f is isomorphic to Hn .
Corollary 5.45 (Finiteness theorem) The number of cycles of stable regions of f is finite.
Proof. Let d be the degree of f . By Corollary 5.43, the complex dimension of
b f ) is at most 2d − 2. This is also the number of critical points of f ,
Teich(C,
counted with multiplicity.
By Theorem 5.41 f has at most 2d − 2 Herman rings, since each contributes
b f ) (namely the Teichmüller space
at least a one-dimensional factor to Teich(C,
of a foliated annulus. By a classical argument, every attracting, superattracting
97
or parabolic cycle attracts a critical point, so there are at most 2d − 2 cycles of
stable regions of these types. Finally the number of Siegel disks is bounded by
4d − 4. (The proof, which goes back to Fatou, is that a suitable perturbation of
f renders at least half of the indifferent cycles attracting; cf. [Mon, §106].)
Consequently the total number of cycles of stable regions is at most 8d − 8.
Remark. The sharp bound of 2d − 2 (conjectured in [Sul4]) has been achieved
by Shishikura and forms an analogue of Bers’ area theorem for Kleinian groups
[Shi], [Bers1].
6
6.1
Hyperbolic 3-manifolds
Kleinian groups and hyperbolic manifolds
A hyperbolic manifold M n is a connected, complete Riemannian manifold of
constant sectional curvature −1.
There is a unique simply-connected hyperbolic manifold Hn of dimension n,
up to isometry. Thus any hyperbolic manifold can be regarded as a quotient
M n = Hn /Γ where Γ ⊂ Isom(Hn ) is a discrete group.
Two explicit models for hyperbolic space are the upper half-space model,
Hn = {(x1 , . . . , xn ) ∈ Rn : xn > 0}
with the metric ρ = |dx|/xn ; and the Poincaré ball model
Hn = Bn = {x ∈ Rn : |x| < 1}
with ρ = 2|dx|/(1 − |x|2 ). Hyperbolic space has a natural sphere at infinity
n−1
S∞
, corresponding to Rn−1 ∪ {∞} in the upper half-space model and to ∂Bn
in the Poincaré ball model.
n−1
The points on S∞
can be naturally interpreted as endpoints of geodesics.
Theorem 6.1 For n > 1, every hyperbolic isometry extends continuously to a
conformal automorphism of the sphere at infinity, establishing an isomorphism
n−1
Isom(Hn ) ∼
).
= Aut(S∞
Proof. First note that reflection through a hyperplane P n−1 ⊂ Hn extends
continuously to (conformal) reflection through the sphere S n−2 = ∂P n−1 ⊂
n−1
. Conversely, reflection through a sphere extends to reflection through
S∞
a hyperplane in hyperbolic space. Since reflections generate both groups, we
see the boundary values of any hyperbolic isometry are conformal, and any
conformal map extends to an isometry.
n−1
Finally any isometry inducing the identity on S∞
must be the identity,
since it stabilizes every geodesic.
98
A Kleinian group is a discrete subgroup Γ ⊂ Isom(Hn ). The limit set Λ ⊂
n−1
of Γ is defined by Λ = Γx ∩ S∞
for any x ∈ Hn . The complement
n−1
Ω = S∞ − Λ is the domain of discontinuity for Γ.
n−1
S∞
Theorem 6.2 The action of a Kleinian group on its domain of discontinuity
is properly discontinuous. That is, for any compact set K ⊂ Ω, the set of γ ∈ Γ
such that γ(K) ∩ K 6= ∅ is finite.
A Kleinian group is elementary if it contains an abelian subgroup of finite
index; equivalently, if |Λ| ≤ 2.
Theorem 6.3 If Γ is nonelementary, then Λ is the smallest nonempty closed
n−1
Γ-invariant subset of S∞
.
A baseframe ω for a hyperbolic manifold M is simply a point in the frame
bundle of M . There is a natural bijection:
{Baseframed hyperbolic manifolds (M n , ω)}
↔
{Torsion-free Kleinian groups Γ ⊂ Isom(Hn )} .
General Kleinian groups correspond to hyperbolic orbifolds. Forgetting the
baseframe amounts to only knowing Γ up to conjugacy in Isom(Hn ).
6.2
Ergodicity of the geodesic flow
Theorem 6.4 The geodesic flow on M = Hn /Γ is ergodic if and only if Γ acts
n−1
n−1
ergodically on S∞
× S∞
.
Theorem 6.5 The geodesic flow is ergodic on any finite-volume hyperbolic manifold M .
Proof. (Hopf) Let f ∈ C0 (T1 M ) be a compactly supported continuous function
on the unit tangent bundle. Let gt denote the geodesic flow, and I ⊂ L2 (T1 M )
the subspace of functions invariant under gt . To prove ergodicity we need to
show I consists of the constant functions.
By the ergodic theorem,
1
f+ (v) = lim
T →∞ T
Z
T
f (gt (v)) dt
0
exists for almost every v ∈ T1 M , and converges to the L2 -projection F of f to
I. On the other hand, the negative time average f− (v) converges to the same
thing, so F (v) = f+ (v) = f− (v) for almost every v.
n−1
Now if v and w are vectors converging to the same point on S∞
in positive
time, then the geodesic rays through v and w are asymptotic, so f+ (v) = f+ (w)
by uniform continuity of f . In other words, F (v) is constant along the (n −
99
1)-spheres of the positive horocycle foliation of T1 (M ). Applying the same
argument to f− (v), we see F is also constant along the negative horocycle
foliation. Finally F (v) is invariant under the geodesic flow. By Fubini’s theorem,
we conclude that F (v) is constant.
Since C0 (T1 M ) is dense in L2 (T1 M ), we have shown I consists only of the
constant functions, and thus the geodesic flow is ergodic.
6.3
Quasi-isometry
Let X and Y be complete metric spaces. A map f : X → Y is a K-quasiisometry if for some R > 0 we have
R + Kd(x, x′ ) ≥ d(f (x), f (x′ )) ≥
d(x, x′ )
−R
K
for all x, x′ ∈ X. In other words, on a large scale, f gives a bi-Lipschitz map to
its image.
We say f : X → X is close to the identity if supX d(x, f (x)) < ∞.
We say f : X → Y is a quasi-isometric isomorphism if there is a quasiisometry g : Y → X such that f ◦ g and g ◦ f are close to the identity. If
f : X → Y is a quasi-isometry and B(f (X), R) = Y for some R, then in fact f
is an isomorphism.
Example. The inclusion f : Zn → Rn is a quasi-isometric isomorphism. An
inverse is the map g : R → Z defined by taking the integer part, g(x) = [x].
Groups. Let G be a finitely-generated group. Choosing a finite set of generators hgi i, we can construct the Cayley graph C(G) by taking G as the vertices
and connecting g and h by an edge if g = gi h for some gi . Taking the edges to
be of unit length, we obtain a metric d on G.
Alternatively, one can define d(id, g) = n where n is the length of a minimal
word expressing g in terms of hgi±1 i, and then extend d to G × G so it is rightinvariant.
Another choice of generators hgi′ i determines another metric d′ on G. By
expressing each gi as a word in hgi′ i and vice-versa, one easily sees that (G, d)
and (G, d′ ) are quasi-isometric.
Theorem 6.6 For any compact Riemannian manifold M , the universal cover
f and the group π1 (M ) are quasi-isometric.
M
Proof. Realize π1 (M, ∗) = G as a group of deck transformations acting on
f, ∗), and define f : G → M
f by f (g) = g∗. The map f can be extended to the
(M
Cayley graph by mapping each edge to a geodesic segment. Edges corresponding
to the same generator of G map to segments of the same length, so f is Lipschitz.
To see f is a quasi-isometry, note that by compactness of M there is an R > 0
such that every point of the universal cover is within distance R of the orbit G∗.
f of length L = d(∗, g∗) joining ∗ to g∗. Cut
Consider a geodesic segment γ ⊂ M
100
γ into L segments of about unit length, and assign to each a point hi ∗ within
distance R. Then d(hi ∗, hi+1 ∗) ≤ 2R + 1). Now by discreteness of G∗, there are
only finitely many h such that d(∗, h∗) ≤ 2R + 1; letting C = max d(id, g) over
such g, we have d(hi , hi+1 ) ≤ C, and thus d(id, g) ≤ CL = Cd(∗, g∗). Thus f is
a quasi-isometry.
Corollary 6.7 (Milnor, Švarc) If M is a closed manifold with a metric of
negative curvature, then π1 (M ) has exponential growth.
Quasi-geodesics. A quasi-geodesic in a metric space X is a quasi-isometric
map
γ : [a, b] → X.
Often we will take [a, b] = R.
Examples.
1. If γ : [a, b] → X is a geodesic and f : X → Y is a quasi-isometry, then
f ◦ γ is a quasi-geodesic.
2. Let γ : R → C(G) be a geodesic in the Cayley graph of a group G =
π1 (M ), and let
f, ∗)
f : (C(G), id) → (M
be defined by f (g) = g∗ and by sending edges to geodesic segments. Then
f ◦ γ is a quasi-geodesic.
3. Efficient taxis take quasi-geodesics along the grid of ‘streets’ connecting
Z2 ⊂ R2 . These Manhattan geodesics are far from unique; e.g. there are
2n
n geodesics from (0, 0) to (n, n). This example comes from the universal
cover of a 2-torus.
4. If γ : R → Hn is a C 2 curve parameterized by arclength, with geodesic
curvature k(s) < k0 < 1 at every point, then γ(s) is a quasigeodesic.
Indeed, the normal planes P (s) through γ(s) advance at a uniform pace
C, so
d(γ(s), γ(t)) ≥ d(P (s), P (t)) ≥ C(k0 )|s − t|.
The borderline case is a horocycle, which is not a quasi-geodesic (in fact
d(γ(s), γ(0)) grows like log s). On the other hand, a curve at constant distance D from a geodesic in H2 has curvature k0 (D) < 1 (and is obviously
a quasi-geodesic).
5. The loxodromic spiral γ : [0, ∞) → C given by γ(s) = s1+i is a quasigeodesic ray with no definite direction; that is, arg γ(s) = log(s) moves
around the circle an infinite number of times as s → ∞.
This γ is not within a bounded distance of any Euclidean geodesic.
101
Lemma 6.8 For any closed convex set K ⊂ Hn , nearest-point projection π :
Hn → K contracts by a factor of at least cosh(r) at distance r from K.
Proof. First calculate kdπ(z)k in the case where K is a geodesic in H2 . We can
normalize coordinates so K is the imaginary axis and z lies on the unit circle;
then π(z) = i. As a hyperbolic geodesic, the arclength parameterization of the
unit circle is given by (tanh s, sech s), so Im z = sech r where r = d(z, K). Now
the geodesics normal to K are Euclidean circles, so kdπk = 1 in the Euclidean
metric. Thus the hyperbolic contraction is by a factor of Im(π(z))/ Im(z) =
cosh r.
The general case reduces to this one by considering a supporting hyperplane
to K.
Theorem 6.9 Let γ : R → Hn be a quasi-geodesic. Then γ is within a bounded
distance of a unique hyperbolic geodesic.
Proof. For convenience, assume γ is continuous. For T ≫ 0, let δT be the
complete geodesic passing through γ(−T ) and γ(T ). Consider the cylinder
B(δT , r) of radius r about δT , and suppose (a, b) is a maximal interval for
which γ(a, b) is outside the cylinder. Then γ(a), γ(b) lie on the boundary of the
cylinder, and the nearest point projection of γ(a, b) to δT is contracting by a
factor of cosh(r). Thus, if |a − b| > R, we have
d(γ(a), γ(b))
K|a − b|
|a − b|
≤ d(γ(a), γ(b)) ≤ 2r +
≤ 2r +
.
K
cosh(r)
cosh(r)
If we take r large enough that cosh(r) ≫ K 2 , then the inequality above implies
|a − b| is not too large, and hence γ[a, b] stays close to δT .
In other words, there is an absolute constant D such that γ(−T, T ) ⊂
B(δT , D). Since the space of geodesics within distance D of γ(0) is compact, we
can pass to a convergent subsequence and obtain a geodesic δ with γ ⊂ B(δ, D).
In hyperbolic space, distinct geodesics diverge, so δ is unique.
6.4
Quasiconformal maps
We now revisit the notion of a quasiconformal map from a geometric point of
view.
Let f : Rn → Rn be a homeomorphism (often required to preserve orientation). For each sphere S = S(x, r), let
K(S) =
max{d(f (y), f (x)) : y ∈ S}
·
min{d(f (y), f (x)) : y ∈ S}
We say f is geometrically quasiconformal if sup K(S) is finite. A homeomorphism f : S n → S n is geometrically quasiconformal if sup K(S) is bounded in
the spherical metric.
102
Theorem 6.10 Let f be a quasiconformal homeomorphism of Rn or S n with
n ≥ 2. Then:
• f is analytically quasiconformal (f has derivatives in L2 satisfying kDf kn ≤
K| det Df | almost everywhere);
• f is absolutely continuous (f (E) has measure zero iff E has measure zero);
• f is differentiable almost everywhere; and
• if Df is conformal a.e., then f is a Möbius transformation.
For proofs, see [LV]. To convey the spirit of the passage between the geometric and analytic definitions, we will prove:
Theorem 6.11 A quasiconformal map f : C → C is absolutely continuous on
lines (ACL).
This means that for any line L ⊂ C, the real and imaginary parts of f are
absolutely continuous functions on L + t for almost every t ∈ C.
Proof. By making a linear change of coordinates in the domain of f , it suffices
to show that Re f (x + iy) is an absolutely continuous function of x ∈ [0, 1] for
almost every y.
Consider the function A(y) = area f ([0, 1] × [0, y]). Since A(y) is monotone
increasing, it has a finite derivative a.e. Choose y such that A′ (y) exists; we will
show F (x) = Re f (x + iy) is absolutely continuous for x ∈ [0, 1].
P
Consider a collection
|Ii | < ǫ.
P of disjoint intervals I1 , . . . , In in [0, 1], with
We must show that
|F (Ii )| < δ(ǫ) → 0 as ǫ → 0.
By subdividing the intervals, we can assume |Ii | = h ≪ ǫ for all i, so nh = ǫ.
Let Si be the h × h square resting on Ii . Since f is quasiconformal, we have
area(f (Si )) ≍ |Ji |2 . Thus we have:
X
Therefore
P
|Ji |
2
≤
≤
n
X
|Ji |2 ≍ n
X
area(f (Si ))
n area(f ([0, 1] × [y, y + h])) ≈ nhA′ (y).
√
|Ji | = O( nh) = O(ǫ1/2 ).
Measuring quasiconformality. The natural measure of distortion for a
homeomorphism f : C → C is the dilatation K(f ).
If f is R-linear, it maps circles to ellipses with major and minor axes M and
m, and we define K(f ) = M/m. For a general quasiconformal map, we define
K(f ) to be the least constant such that K(Df ) ≤ K(f ) almost everywhere.
Perhaps surprisingly, K(f ) is not the same as sup K(S) over all spheres. For
example, if f is given in polar coordinates by f (r, θ) = (rα , θ), with α > 1, then
K(f ) = α even though K(S) = 2α for the sphere S = {z : |z − 1| = 1}.
The proper geometric definition of the dilatation is that K(f ) is the least
constant such that lim supr→0 K(S(x, r)) ≤ K(f ) almost everywhere.
103
The 1-dimensional case. The geometric definition of quasiconformality makes
sense even in dimension one, and yields the useful family of k-quasisymmetric
homeomorphisms f : R → R, satisfying sup K(S) ≤ k for every sphere S. Of
course a quasisymmetric map f is differentiable a.e. (since it is a monotone
function) , but f need not be absolutely continuous.
6.5
Quasi-isometries become quasiconformal at infinity
Let f : Hn+1 → Hn+1 be a quasi-isometry.
n
n
n
The extension F : S∞
→ S∞
of f is defined as follows. Given x ∈ S∞
, take
a geodesic ray γ landing at x, and let δ be a geodesic ray that shadows the
quasi-geodesic f ◦ γ; then F (x) is the endpoint of δ.
It is easy to see:
If f is close to the identity, then F is the identity.
Thus if f is an isomorphism with quasi-inverse g, the extensions of f and g
satisfy F ◦ G = G ◦ F = id, so F is bijective. In fact we have:
n
n
Theorem 6.12 The extension F : S∞
→ S∞
of a quasi-isometry f : Hn+1 →
n+1
H
is a homeomorphism.
Proof. It suffices to show F is injective and continuous. Let us work in the
Poincaré unit ball model, with Hn+1 = Bn+1 ⊂ Rn+1 . Composing with an
isometry, we can assume f (0) = 0.
n
with |x − y| = ǫ > 0. Let γ be the geodesic joining x
Consider x, y ∈ S∞
and y, and let δ be the geodesic shadowing f (γ). Then the endpoints are δ are
F (x) and F (y). Since the endpoints are distinct, F is injective.
Moreover, d(0, γ) = | log ǫ| + O(1) in the hyperbolic metric, so we have
d(0, δ) ≥ | log ǫ|/K + O(1). Therefore |F (x) − F (y)| = O(ǫ1/K ), showing F is
even Hölder continuous.
Corollary 6.13 Any quasi-isometry f : Hn+1 → Hn+1 is an isomorphism.
Proof. Let F be the extension of f . Given z ∈ Hn+1 , choose a geodesic δ
through z with endpoints F (x), F (y), and let γ be the geodesic from x to y.
Then f (γ) comes within a bounded distance of z, so f is essentially surjective
and therefore it admits a quasi-inverse.
Theorem 6.14 The extension of a quasi-isometry f on Hn+1 is a quasiconforn
mal homeomorphism F on S∞
.
Proof. To see F is quasi-conformal, we will show F (S(a, r)) has a bounded ratio
n
of inradius to outradius for any small sphere S(a, r) ⊂ S∞
. For convenience we
normalize so a = 0 and F fixes 0 and ∞. Let |b| = |c| = r maximize the ratio
104
f
c
F(c)
b
F(b)
Figure 16. Geodesics, inradius and outradius.
K = |F (c)/F (b)|. Then the geodesics [0, b] and [c, ∞] are at distance O(1),
while the geodesics [0, F (b)] and [F (c), ∞] are at distance about log K (see
Figure 16). Since f is a quasi-isometry, f ([0, b]) and f ([∞, c]) lie at a bounded
distance from [0, F (b)] and [∞, F (c)], and from each other. Thus log K = O(1)
and F is quasiconformal.
6.6
Mostow rigidity
In this section we prove that a compact hyperbolic manifold of dimension 3 or
more can be reconstructed from its fundamental group.
Lemma 6.15 Let f : M → N be a homotopy equivalence between compact
Riemannian manifolds. Then the lift
f→N
e
fe : M
of f gives a quasi-isometric isomorphism between the universal covers of M and
N.
e →M
f be a
Proof. Let g : N → M be a homotopy inverse to f , and let ge : N
e
lift of g compatible with f . Then the homotopy ht of g ◦ f to the identity lifts
to a homotopy e
ht of ge ◦ fe to the identity.
We can assume that f and g are smooth, so by compactness of M and N
their lifts are K-Lipschitz for some K. Similarly, since het is a lift of a homotopy
on M , there is a D > 0 such that
d(x, ge ◦ fe(x)) ≤ diam e
h0,1 (x) ≤ D
(6.1)
f. Therefore ge ◦ fe is close to the identity. Similarly, fe ◦ ge is close
for all x ∈ M
to the identity. It follows that fe is a quasi-isometry. Indeed, we have the upper
bound
d(fe(x), fe(y)) ≤ Kd(x, y)
since fe is Lipschitz, and the lower bound
d(x, y) ≤ d(e
g ◦ fe(x), ge ◦ fe(y)) − D ≤ Kd(fe(x), fe(y)) − D
by (6.1). Similarly, e
g is a quasi-inverse for fe.
105
f and N
e are quasi-isometry to π1 (M )
Remark. One can also argue that M
e
and π1 (N ) in such a way that f is close to the quasi-isometric isomorphism
f∗ : π1 (M ) → π1 (N ).
Theorem 6.16 (Mostow) Let M n and N n be compact hyperbolic n-manifolds,
n ≥ 3, and let
ι : π1 (M n ) → π1 (N n )
be an isomorphism. Then there is an isometry I : M n → N n such that ι = I∗ .
Proof. The manifolds M and N are K(π, 1)’s, so the isomorphism ι between
their fundamental groups can be realized by a homotopy equivalence f : M →
N . By the preceding lemma, the lift fe : Hn → Hn is a quasi-isometry, so its
n−1
n−1
extension is a quasiconformal map F : S∞
→ S∞
conjugating the action of
π1 (M ) to that of π1 (N ). The map F is differentiable almost everywhere, by
fundamental results on quasiconformal mappings.
If DF is conformal almost everywhere then, since n > 2, F is a Möbius
transformation. (This step fails when n = 2). Then F extends to an isometry
Ie : Hn → Hn which descends to the desired isometry I : M → N .
n−1
Otherwise, DF fails to be conformal on a set of positive measure in S∞
.
By ergodicity, DF is nonconformal almost everywhere.
Now for concreteness suppose n = 3. Then the conformal distortion of
2
DF (x) defines an ellipse in the tangent space Tx S∞
for almost every x. Let
2
Lx ⊂ Tx S∞ be the line through the major axis of this ellipse.
2
2
Define θ : S∞
× S∞
→ S 1 as follows: given x, y on the sphere, use parallel
2
2
transport along the geodesic joining x to y to identify Tx S∞
with Ty S∞
, and
let θ be the angle between the lines Lx and Ly .
Then θ is invariant under the action of π1 (M ), so by ergodicity of the
geodesic flow it is a constant a.e. This means that if we choose coordinates
2
so x = ∞, then the lines Ly have constant slope for y ∈ R2∞ . But almost
on S∞
any point can play the role of x, while it is clearly impossible to arrange the
linefield Ly to have constant slope in more than one affine chart on the sphere.
The proof for n > 2 is similar.
Note. Mostow rigidity also holds for finite volume manifolds.
6.7
Rigidity in dimension two
Here is a version of Mostow rigidity that works for hyperbolic surfaces.
1
1
Theorem 6.17 Let f : S∞
→ S∞
be an orientation-preserving homeomor′
phism conjugating Γ to Γ , where X = H/Γ and X ′ = H/Γ′ are finite-volume
hyperbolic surfaces. Then f is either singular or absolutely continuous. In the
absolutely continuous case, f must be a Möbius transformation.
106
Proof. For convenience we treat the case where X and X ′ are compact. By
hypothesis, there is an isomorphism ι : Γ → Γ′ induced by f . We first observe
that if Γ = Γ′ and ι is the identity, then f is the identity. This is because f must
fix the attracting fixed-point of every g ∈ Γ, and such fixed points are dense on
1
S∞
.
By ergodicity of the action of Γ on the circle, f is either absolutely continuous
or singular. We will show that in the former case, Γ is conjugate to Γ′ inside
1
b and
G = Isom H; in other words, X ∼
with R
= X ′ . To this end, we identify S∞
choose coordinates so that f (∞) = ∞. Then f : R → R is a homeomorhism; in
particular, f ′ exists a.e.
R
Our hypothesis of absolutely continuity implies that f = f ′ ; in particular,
f ′ (x) 6= 0 for some x. We can assume x = 0 and f ′ (0) = 1. Let An (x) = nx.
Then fn = An f A−1
n converges to the identity map f∞ (x) = x uniformly on
compact sets. Moreover fn intertwines the actions of certain conjugates Γn and
Γ′n of our original Fuchsian groups. Since G/Γ and G/Γ′ are compact, we can
pass to a subsequence so these conjugates converge, say to Γ∞ and Γ′∞ . Since
f∞ (x) = x, we have Γ∞ = Γ′∞ and hence X ∼
= X ′.
The same proof shows the isomorphism ι : Γ → Γ′ induced by the original
map f is given by conjugation by an element g ∈ G. Thus our initial remarks
show f = g.
6.8
Geometric limits
For another viewpoint on Mostow rigidity, we introduce in this section the
geometric topology on baseframed hyperbolic manifolds.
For any topological space X, let Cl(X) be the set of all closed subsets of X.
When X is a compact Hausdorff space, we introduce a topology on Cl(X) by
defining Fα → F iff
• for any open set U ⊃ F , we have Fα ⊂ U for all α ≫ 0; and
• for any open set with U ∩ F 6= ∅, we have Fα ∩ U 6= ∅ for all α ≫ 0.
Theorem 6.18 If X is a compact Hausdorff space, then so is Cl(X).
Next suppose X is only locally compact and Hausdorff. Then the onepoint compactification X ′ = X ∪ {∞} is compact, and there is a natural map
Cl(X) → Cl(X ′ ) by sending F to F ∪ {∞}. Under this inclusion, Cl(X) is
closed, so it becomes a compact Hausdorff space with the induced topology.
Example. In Cl(R), the intervals In = [n, ∞) converge to the empty set as
n → ∞.
Now suppose G is a Lie group. The set of all closed subgroups of G forms a
compact subset of Cl(G). If H, Hn are subgroups, we say Hn → H geometrically
if we have convergence in the Hausdorff topology.
Finally let G = Isom(Hn ). Recall that every baseframed hyperbolic manifold
(M, ω) determines a torsion-free discrete group Γ ⊂ G, and vice-versa. We say
107
(Mn , ωn ) converges geometrically to (M, ω) if the corresponding Kleinian groups
satisfy Γn → Γ in Cl(G).
Theorem 6.19 The set Hrn of baseframed hyperbolic manifold (M, ω) with injectivity radius ≥ r at the basepoint is compact in the geometric topology.
If we fix a hyperbolic manifold M , then we have a natural map F M → Cl(G)
sending each ω in the frame bundle F M to the subgroup Γ(M, ω). This map is
continuous. In particular, if M is compact, then the set of baseframed manifolds
(M, ω) that can be formed from M is compact in the geometric topology.
We can now offer a proof of the last step of Mostow rigidity that does not
make reference to ergodic theory of the geodesic flow.
Theorem 6.20 Let M = H3 /Γ be a compact hyperbolic 3-manifold, and let
b be an L∞ Γ-invariant Beltrami differential. Then µ = 0.
µ ∈ M (C)
Proof. Suppose µ 6= 0. Then, by a variant of the Lebesgue density theorem,
there exists a p ∈ C such that µ(p) 6= 0 and µ is almost continuous at p. That
is, if we write µ = µ(z) dz/dz, then for each ǫ > 0 we have
lim
r→0
m{x ∈ B(p, r) : |µ(x) − µ(p)| > ǫ}
= 0.
m(B(p, r))
By a change of coordinates, we can assume that p = 0. Let µ(0) = a. Then for
gt (z) = tz, we have the weak* limit
gt∗ µ = µ(tz)
dz
dz
→ν=a
dz
dz
as t → 0. Concretely, this means
Z
Z
Z
∗
2
(gt µ)φ = µ(tz)φ(z) |dz| → a · φ(z) |dz|2
C
1
for every L measurable quadratic differential φ = φ(z) dz 2 .
Since µ is Γ-invariant, gt∗ (µ) is invariant under
Γt = gt∗ (Γ) = gt−1 Γgt .
These conjugates Γt correspond to the baseframed manifolds (M, ωt ) as ωt
moves along a geodesic. Since M is compact, we can pass to a subsequence such
that Γt → Γ′ , where Γ′ is a conjugate of Γ′ . Indeed, Γt only depends on the
value of [gt ] in the compact space Γ\G.
Then ν is invariant under Γ′ . This implies Γ′ fixes the point z = ∞, since
∞ is the only point at which ν is discontinuous. Therefore Γ′ is an elementary
b is dense.
group — which is impossible, since in fact every orbit of Γ′ on C
Pushing this argument further, one can show:
Theorem 6.21 Let M 3 = H3 /Γ be a hyperbolic manifold whose injectivity radius is bounded above. Then M 3 is quasiconformally rigid: the only measurable
b is µ = 0.
Γ-invariant Beltrami differential µ ∈ M (C)
See [Mc5, Thm. 2.9].
108
6.9
Promotion
The basic mechanism of Mostow rigidity is promotion: we can use the expanding
dynamics of a cocompact group to promote a point of measurable continuity to
a point of topological continuity.
Here are two simpler results with the same promotion principle at work.
Theorem 6.22 Let M = Hn /Γ be a compact hyperbolic manifold. Then the
n−1
action of Γ on S∞
is ergodic.
n−1
Proof 1. Let A ⊂ S∞
be a Γ-invariant set of positive measure. Then A has
n−1
a point of Lebesgue density p ∈ R∞
; that is,
lim
r→0
m(B(p, r) ∩ A)
= 1.
m(B(p, r))
We may assume p = 0. Let gn (x) = x/n; then gn ∈ G = Isom(Hn ). Since 0 is
n−1
a point of density, we have gn∗ (χA ) → 1 in the weak* topology on L∞ (S∞
).
Since G/Γ is compact, we can write gn = γn hn with γn ∈ Γ and hn in a compact
subset of G. Then passing to a subsequence, we have hn → h, and therefore
gn∗ (χA ) = h∗n (γn∗ χA ) = h∗n (χA ) → h∗ (χA ).
Therefore h∗ (χA ) = 1, which shows χA = 1 and A has full measure. Thus Γ
acts ergodically.
n−1
Proof 2 (Ahlfors). Let A ⊂ S∞
be a Γ-invariant set of positive measure.
Then the harmonic extension of χA to Hn descends to a harmonic function
n−1
u : M → R. By the maximum principle, u is constant, and thus A = S∞
.
Theorem 6.23 Let f : X → Y be a homotopy equivalence between a pair of
compact hyperbolic surfaces, and let
1
1
F : S∞
→ S∞
be the boundary values of fe. Then either F ′ = 0 almost everywhere, or f is
homotopic to an isometry.
Proof. Write X = H/Γ and Y = H/Γ′ . Suppose F ′ (p) 6= 0. By a change
of coordinates, we can assume p = F (p) = 0 ∈ R1∞ . Let a = F ′ (0) and
gn (x) = x/n. Then we have
Fn (x) = gn−1 ◦ F ◦ gn (x) = nF (x/n) → F∞ (x) = ax
uniformly on compact sets. That is, the blowups of F yield in the limit the
boundary values F∞ of an isometry of H2 .
Now Fn conjugates Γn = gn−1 Γgn to Γ′n = gn−1 Γ′ gn . By compactness of X
and Y , we can pass to a subsequence such that Γn and Γ′n converge geometrically
to groups Γ∞ and Γ′∞ that are conjugates of Γ and Γ′ . Then F∞ conjugates
Γ∞ to Γ′∞ , so X and Y are isometric. With more care one can check that the
isometry is in the homotopy class of f .
109
Notes. Bowen used this fact to prove that the limit set of a quasifuchsian group
is either a round circle or a Jordan curve of Hausdorff dimension d > 1 [Bo].
6.10
Ahlfors’ finiteness theorem
We now turn to results which control much more general hyperbolic 3-manifolds,
with the constraint that M 3 = H3 /Γ is compact replaced by the assumption
that π1 (M 3 ) is finitely-generated.
Recall that the action of a Kleinian group on its domain of discontinuity Ω
is properly discontinuous.
Theorem 6.24 (Ahlfors’ finiteness theorem) Let Γ ⊂ Isom+ (H3 ) be a finitelygenerated torsion-free Kleinian group. Then the quotient complex 1-manifold
X = Ω/Γ is isomorphic to the complement of a finite set in a finite union of
compact Riemann surfaces.
Corollary 6.25 The components of Ω fall into finitely many orbits under the
action of Γ.
Corollary 6.26 The domain of discontinuity has no wandering domain; in
fact, the stabilizer ΓU of any component U is infinite.
b C, C∗ or a torus C/L, so
If Γ is elementary, then Ω/Γ is isomorphic to C,
the conclusion of the finiteness theorem holds.
b is an N -generator nonelemenLet us assume from now on that Γ ⊂ Aut(C)
b
tary Kleinian group. This condition implies that the centralizer of Γ in Aut(C)
is finite, and some of the results below will hold under that slightly weaker
hypothesis.
We will start by proving the slightly weaker statement established in Ahlfors’
original paper [Ah1]:
Theorem 6.27 If Γ has N generators, then dim Teich(Ω/Γ) ≤ 3N − 3.
Remarks. The bound is sharp: an N -generator Schottky group has quotient
surface X of genus g = N , satisfying dim Teich(X) = 3g − 3.
While it is true that any connected Riemann surface of infinite hyperbolic
area has an infinite-dimensional Teichmüller space, the result above does not
exclude the possibility that X contains infinitely many components isomorphic
b − {0, 1, ∞} (since dim Teich(Y ) = 0).
to the triply-punctured sphere Y = C
The proof has two main ingredients — the cohomology of deformations, and
an estimate for quasiconformal vector fields.
Cocycles and group cohomology. Let G be a group, and A a G-module. A
1-cocycle is a map ξ : G → A such that
ξ(gh) = ξ(g) + g · ξ(h).
110
Such a cocycle is also called a crossed homomorphism, since it coincides with a
homomorphism when G acts trivially on A. A 1-coboundary is a cocycle of the
form
ξ(g) = g · a − a
for some a ∈ A. The quotient space, (cocycles)/(coboundaries), gives the group
cohomology H 1 (G, A).
One can view the group H 1 (G, A) as classifying affine actions of G on A of
the form g(a) = g · a + ξ(a), up to conjugacy by translation. This explains the
cocycle rule: we need to have
(gh)(a) = gh · a + ξ(gh) = g · (h · a + ξ(h)) + ξ(g) = gh · a + g · ξ(h) + ξ(g).
The action g(a) = g · a is considered trivial. It is conjugate to g(a + b) − b =
g · a + (g · b − b), so the coboundary ξ(g) = g · b − b is also considered trivial.
Holomorphic vector fields and deformations. Let G = PSL2 (C), and let
A = sl2 (C) be the Lie algebra of holomorphic vector fields on the sphere. We
have dim sl2 (C) = dim G = 3. The adjoint action makes A into a G-module.
We can regard an element X ∈ sl2 (C) as a matrix or as a vector field, in terms
of which the action can be written
g · X = gXg −1 = g∗ (X).
Lemma 6.28 If Γ is a nonelementary N -generator Kleinian group, then
dim H 1 (Γ, sl2 (C)) ≤ 3N − 3.
Proof. The space of cocycles is at most 3N dimensional since a cocycle is
determined by its values on generators. Since the centralizer of Γ is trivial,
the space of coboundaries is isomorphic to sl2 (C), hence 3-dimensional. The
difference gives the bound 3N − 3.
The group H 1 (Γ, sl2 (C)) can be interpreted as the tangent space to the
variety of homomorphisms from Γ into G, modulo conjugacy, at the inclusion.
That is, if ρt : Γ → G is a 1-parameter family of representations, with ρ0 = id,
and we set
d
ξ(g) = ρt (g)g −1 ,
dt
then ξ(g) gives a cocycle with values in sl2 (C). This cocycle is a coboundary iff
to first order we have ρt (g) = γt gγt−1 , i.e. if the deformation is by conjugacy.
From Beltrami differentials to cocycles. Now let M (X) be the space of
b
L∞ Beltrami differentials on X, or equivalently the space of Γ-invariant µ on C
supported on Ω. We now define a natural map
δ : M (X) → H 1 (Γ, sl2 (C)).
Namely, we solve the equation ∂v = µ and set δµ = ξ where
ξ(g) = g∗ (v) − v.
111
Since µ is Γ-invariant, we have ∂ξ(g) = 0, so ξ(g) is indeed a holomorphic vector
field and therefore an element of sl2 (C). Note that the solution to ∂v = µ is
only well-defined modulo sl2 (C), but changes v by an element of sl2 (C) only
changes ξ by a coboundary.
The idea of the construction is that µ ∈ M (X) should correspond to Riemann surface Xµ complex structure deformed infinitesimally in the direction µ,
plus a quasiconformal map f : X → Xµ with complex dilatation an infinitesimal
multiple of µ. Since f is infinitely close to the identity, it should be represented
by a vector field v. But the vector field does not quite live on X, because the
target of f is Xµ rather than X. On the universal cover, v is really well-defined,
and its failure to live on X is measured by the cocycle ξ(g).
Quadratic differentials. Let Q(X) be the Banach space
R of holomorphic
quadratic differentials on X with finite L1 -norm: kφk = X |φ|. There is a
natural pairing M (X) × Q(X) → C given by
Z
hφ, µi = φµ.
R
Since hφ, φ/|φ|i = |φ|, the pairing descends to a perfect pairing on M (X)/Q(X)⊥ ×
Q(X). The quotient pairing is exactly that between the tangent space TX Teich(X)
and the cotangent space Q(X) = T∗X Teich(X).
R
Let us say µ ∈ M (X) is trivial if µ ∈ Q(X)⊥ ; that is, if µφ = 0 for all
φ ∈ Q(X), or equivalently if [µ] represents the zero tangent vector to Teichmüller
space.
Let V (X) be the space of quasiconformal vector fields on X, and let kvkX =
sup ρX (z)|v(z)| denote the supremum of the hyperbolic length of v.
Lemma 6.29 If δµ = 0, then ∂v = µ has a Γ-invariant solution vanishing on
the limit set.
Proof. If δµ = 0, then we can modify any solution v by a holomorphic vector
field to obtain ξ(g) = 0 for all g; then v is Γ-invariant. Now if z ∈ Λ is a
hyperbolic fixed-point of an element g ∈ Γ, then g ′ (z) 6= 1, so the condition
g∗ (v) = v implies v(z) = 0. Such points are dense in the limit set, so v|Λ = 0.
b − {0, 1, ∞},
Lemma 6.30 Let v be a quasiconformal vector field on Z = C
vanishing at 0, 1 and ∞. Then kvkZ , the maximum speed of v in the hyperbolic
metric on Z, is finite.
Proof 1. The vector field v has an |x log x| modulus of continuity, which exactly
balances the 1/|x log x| singularity of the hyperbolic metric at the punctures
0, 1, ∞.
Proof 2. The Teichmüller space of the 4-times punctured sphere is isometric
to Z by the cross-ratio map. Thus the hyperbolic length of v(z) is the same
112
b − {0, 1, ∞, z} defined by ∂v,
as the Teichmüller length of the deformation of C
which is controlled by k∂vk∞ .
b →C
b
Proof 3. Let µ = ∂v. By linearity we can assume kµk∞ = 1. Let φt : C
be the unique holomorphic motion fixing 0, 1 and ∞ and with µ(φt ) = tµ. Then
f (t) = φt (z) gives a holomorphic map f : ∆ → Z. By the Schwarz lemma, with
w = d/dz, we have
kv(z)kX = kDf (w)kX ≤ kwk∆ = 2.
b and
Corollary 6.31 If v is a quasiconformal vector field on a domain Ω ⊂ C,
v|∂Ω = 0, then kvkΩ is finite.
Proof. At any point z ∈ Ω we can find three points {a, b, c} in ∂Ω such that
the hyperbolic metric on Ω at z is comparable to the hyperbolic metric on
b − {a, b, c}. But the length of v(z) in the hyperbolic metric on C
b − {a, b, c} is
C
bounded.
Lemma 6.32 If v ∈ V (X) has kvkX < ∞ then
µ = ∂v is trivial. In other
R
words, if v has bounded hyperbolic speed, then µφ = 0 for all φ ∈ Q(X).
Proof. Let ρ be the hyperbolic metric on X, and fix φ ∈ Q(X). Let X0 be a
component of X, and consider a large ball B(p, r) ⊂ X0 . Then we have
Z ∞
Z
Z
|φ|/ρ < ∞.
|φ| =
dr
∂B(p,r)
0
X0
Integrating by parts and using the fact that ∂φ = 0, we find:
Z
Z
φ(∂v) =
φv.
B(p,r)
∂B(p,r)
1
Now the sup-norm of ρv is bounded,
R while the L -norm of |φ|/ρ tends to zero as
r → ∞, so we can conclude that X0 φ∂v = 0. Since X0 and φ were arbitrary,
we find µ = ∂v ∈ M (X) is trivial.
Proof of Theorem 6.27. By the preceding lemmas, we have
Ker δ ⊂ Q(X)⊥ .
Indeed, if δµ = 0, then µ = ∂v for a Γ-invariant v vanishing on ∂Ω = Λ. Then v
descends to a quasiconformal vector field on X with boundary hyperbolic speed,
and hence µ = ∂v is trivial, i.e. µ belongs to Q(X)⊥ .
113
Since the pairing between Q(X) and M (X)/Q(X)⊥ is perfect, we have:
dim Q(X) =
≤
≤
dim M (X)/Q(X)⊥
dim M (X)/ Ker δ
dim H 1 (Γ, sl2 (C)) ≤ 3N − 3.
Notes. Ahlfors’ finiteness theorem fails for hyperbolic 4-manifolds; see [KP].
For another viewpoint on boundedness of kvkΩ when v|∂Ω = 0, one can use
the fact that a quasiconformal vector field has modulus of continuity x| log x|,
while the hyperbolic metric near a puncture is at worst like |dz|/|z|| log z|.
6.11
Bers’ area theorem
Theorem 6.33 (Bers) Let Γ be a nonelementary N -generator Kleinian group.
Then the hyperbolic area of X = Ω(Γ)/Γ is finite; in fact we have
area(X) ≤ 4π(N − 1).
Remark. By Gauss-Bonnet, once we know X has finite hyperbolic area, we
have area(X) = 2π|χ(X)|, and thus |χ(X)| ≤ 2N − 2. Again this inequality is
sharp for a handlebody of genus g: we have N = g and χ(X) = 2 − 2g.
Proof. We follow the same lines as Ahlfors’ finiteness theorem, but replace
b O(2)) of holomorphic vector fields with the space
the space sl2 (C) = H 0 (C,
0 b
Vd = H (C, O(2d)) of holomorphic sections of the dth power of the tangent
b
bundle to C.
Then a typical element of Vd has the form v = v(z)(∂/∂z)d , and we have
dim Vd = 2d + 1. As before, the space of 1-coboundaries is isomorphic to Vd , so
we have
dim H 1 (Γ, O(2d)) ≤ (2d + 1)(N − 1).
Then ∂v = µ is a (−d, 1)-form.
For the analytical part, let Md (X) denote the measurable (−d, 1)-forms on
X which are in L∞ with respect to the hyperbolic metric. Similarly let Qd (X)
denote the L1 holomorphic sections φ(z) dz d+1 of the (d + 1)st power of the
canonical bundle on X. Then there is a natural pairing between Md (X) and
Qd (X) as before.
We define
δd : Md (X) → H 1 (Γ, Vd )
as before: by solving δv = µ and taking the resulting cocycle. Note that the lift
of µ to Ω satisfies
sup ρd−1 (z)|µ(z)| < ∞
where the hyperbolic metric ρ(z)|dz| satisfies ρ(z) → ∞ near ∂Ω. Thus µ is
locally in L∞ and the ∂-equation is solvable. (For example, any µ ∈ Md (H)
satisfies µ(z) = O(y d−1 ).)
114
We have δµ = 0 iff there is a Γ-invariant solution to ∂v = µ. In this case,
v = 0 on Λ and one can again show v is bounded in the hyperbolic metric. Then
integration by parts can be justified, showing µ ∈ Qd (X)⊥ . In conclusion, we
find dim Qd (X) ≤ (2d + 1)(N − 1).
Now let us examine the integrability condition on φ = φ(z) dz d+1 . On the
punctured disk, the hyperbolic metric is given by ρ = |dz|/|z log z|. So if we
have
Z
ρ1−d |φ| < ∞
U
for some neighborhood U of z = 0, then φ has at worst a pole of order d at
z = 0.
Thus if X = X − P , where X is a compact surface of genus g and |P | = n,
then Qd (X) = H 0 (X, O((d + 1)K + dP )), where K is a canonical divisor. We
have deg(K + P ) = 2g − 2 + n = |χ(X)|. By Riemann-Roch, the dimension
of Qd (X) agrees with the degree of the divisor d(K + P ), up to an additive
constant, so we have
dim Qd (X) = d|χ(X)| + O(1).
Comparing with the dimension of the group cohomology, we find
d|χ(X)| ≤ (2d + 1)(N − 1) + O(1).
Dividing by d and letting d → ∞ we get the area theorem.
Notes. Bers’ theorem is proved in [Bers1]. The case of a Schottky group again
shows the bound is sharp.
It is desirable to have a geometric interpretation of the cohomology H 1 (Γ, O(d)),
generalizing the case H 1 (Γ, O(2)) which measures deformations of Γ inside
PSL2 (C) and which appears in Ahlfors’ finiteness theorem. Such an interpretation has been developed by Anderson. The idea is to use the embedding
P1 → Pn as a rational normal curve to extend the action of Γ to Pn , and then
investigate its deformations inside P GLn+1 (C). See [And].
For example, SL2 (Z) acts on both RP1 and RP2 = PR2+1 . The latter action
comes from the Klein and Minkowski models for hyperbolic space. The action
of P1 is rigid but the action on P2 admits deformations; see [Sch].
6.12
No invariant linefields
Let Γ ⊂ Isom(H3 ) be a finitely-generated Kleinian group. In this section we will
show:
Theorem 6.34 (Sullivan) The limit set Λ(Γ) supports no measurable, Γ-invariant
field of tangent lines.
b is a Γ-invariant Beltrami differential, and if µ = 0
Equivalently, if µ ∈ M (C)
outside Λ, then µ = 0 a.e.
115
Let Jg(x) = |γ ′ (x)|2σ denote the Jacobian determinant of g at x for the
spherical metric. If Jg(x) = 1 on a set of positive measure, then g is an isometry
in the spherical metric and g has a fixed-point in H3 . Since Γ is torsion-free, we
conclude that for almost every x, the map
g 7→ Jg(x)
gives an injection of Γ into (0, ∞).
b
We begin with a general analysis of the action of Γ on an invariant set E ⊂ C
of positive measure. The measurable dynamical system (Γ, E) is conservative
if for any A ⊂ E of positive measure, we have m(A ∩ gA) > 0 for infinitely
many g ∈ Γ. At the other extreme,
S (Γ, E) is dissipative if it has a ‘fundamental
domain’ F ⊂ E, meaning E = Γ gF and m(F ∩ gF ) = 0 for all g 6= e.
Example: f (z, t) = (e2πiθ x, t) gives a conservative action of Z on E = S 1 ×
[0, 1]. Note that f is far from ergodic.
P
Lemma 6.35 Let C = {x ∈ E :
Γ Jg(x) = ∞} and let D = E − C. Then
(Γ, C) is conservative and (Γ, D) is dissipative.
Proof. Suppose A ⊂ C has positive measure but m(A ∩ gA) = 0 for all g
outside a finite set G0 ⊂ G. Then any point of C belongs to at most n = |G0 |
translates of A. It follows that
Z X
Jg(x) dm ≤ n · m(C) < ∞,
A Γ
contrary to the definition of C. Thus (Γ, C) is conservative.
To show (Γ, D) is dissipative, let F ⊂ D be the set of y such that Jg(y) < 1
for all g ∈ Γ. Clearly gF is disjoint from F for g 6= e, because Jg −1 (g(y)) =
1/Jg(y) > 1 for all g(y) ∈ gF .
Now for almost any x ∈ D, the values {Jg(x) : g ∈ Γ} ⊂ R are discrete
(by summability) and correspond bijectively to the elements of Γ. Thus there
is a unique g maximizing Jg(x), and therefore y = g(x) belongs to F . Thus
S
Γ gF = D and (Γ, D) is dissipative.
Lemma 6.36 Let Γ ⊂ Isom(H3 ) be a finitely-generated Kleinian group with
limit set Λ. Then (Γ, Λ) is conservative.
Proof. Suppose not. Then there is a set D ⊂ Λ of positive measure such that
(Γ, D) is dissipative. Let F ⊂ D be a measurable fundamental domain for Γ,
b denote the space of L∞ Beltrami differentials supported
and let M (F ) ⊂ M (C)
on F . Each µ ∈ F can be freely translated by Γ to give a Γ-invariant Beltrami
differential µ′ supported on D ⊂ Λ. Thus the space M (Λ)Γ of Γ-invariant
differentials supported on the limit set is infinite-dimensional.
On the other hand, the natural map
δ : M (Λ)Γ → H 1 (Γ, sl2 (C))
116
is injective. Indeed, if δµ = 0, then the equation ∂v = µ has a solution vanishing
on Λ, which implies µ = 0 on Λ. Since Γ is finitely-generated, the cohomology
group on the right is finite-dimensional, so we obtain a contradiction.
Lemma 6.37 Let (Γ, E) be conservative and fix ǫ > 0. Then there is a g ∈
Γ − {e} such that |Jg(x) − 1| < ǫ on a set of positive measure.
Proof. Suppose not. Then we can find ǫ > 0 such that |Jg(x) − 1| < ǫ =⇒
g = e a.e. Therefore the image of g 7→ Jg(x) is discrete a.e.: since if Jg(x) and
Jh(x) are close, then J(hg −1 )(y) is close to one at y = g(x).
Let E+ = {x : Jg(x) > 1 ∀g ∈ Γ}. Then g(E+ ) ∩ E+ = ∅ for any g 6= e,
since J(g −1 )(g(x)) = 1/Jg(x) < 1 for x ∈ E+ . By conservativity, we have
m(E+ ) = 0. By similar reasoning, we conclude that for a.e. x there are unique
elements g− , g+ ∈ Γ (depending on x) such that
Jg− (x) < 1 < Jg+ (x)
and no elements have Jacobians closer to 1 at x. Then the maps F± : E → E
defined by F± (x) = g± (x) are inverses of one another, so both are injective.
But F+ is uniformly expanding, which is impossible since the total measure of
E is finite.
2
Inducing. The preceding result is obvious if E
R = S∞ . Indeed, for any g ∈
3
Isom H , the Jacobian Jg(x) is continuous and S 2 Jg = 1, so the Jacobian is
∞
close to one on a set of positive measure.
For applications it is useful to have the following stronger statement.
Lemma 6.38 Let (Γ, E) be conservative and fix ǫ > 0 and a set F ⊂ E of
positive measure. Then there is a g ∈ Γ − {e} and a set of positive measure
A ⊂ F such that g(A) ⊂ F and |Jg(x) − 1| < ǫ for all x ∈ A.
The most conceptual formulation of this result is via inducing. First we must
generalize our setting. A partial automorphism g : E 99K E is an invertible
measurable map whose domain and range are in E. A collection of partial
automorphisms G forms a pseudo-group if whenever the composition g ◦ h of
g, h ∈ G is defined on a set of positive measure A, we have g ◦ h = k|A for
some k ∈ G. We say (G, E) is conservative if whenever m(A) > 0, we have
m(A ∩ g(A)) > 0 for infinitely many g ∈ G.
Now suppose Γ is a group acting on an invariant set E, and suppose F ⊂ E
has positive measure. Let
G = Γ|F = {g|F ∩ g −1 (F ) : g ∈ Γ}.
Then G is a pseudo-group acting on F . If (Γ, E) is conservative, so is (G, F ).
It is then easy to see that Lemma 6.37 applies just as well to pseudo-group
actions. Applying the Lemma to Γ|F yields Lemma 6.38.
117
Theorem 6.39 Let Γ be any Kleinian group, and suppose (Γ, E) is conservab Then E supports no Γ-invariant linefield.
tive, E ⊂ C.
Remark. For this Theorem we do not assume Γ is finitely generated. This
very general statement shows that the Γ-invariant complex structure is unique
on the conservative part of the dynamics; any variation must be supported on
the dissipative part, where it can be freely specified in a measurable fundamental
domain.
Proof. Suppose to the contrary that E supports a Γ-invariant line field, specified by a Beltrami differential with |µ| = 1. Fix a small ǫ > 0. Choose coordinates so that z = ∞ is not fixed by any g 6= e in Γ. Writing µ = µ(z)dz/dz,
we can find a compact set of positive measure K ⊂ C on which the linefield has
nearly constant slope. Rotating the linefield, we can assume the slope is nearly
one, i.e. |µ(z) − 1| < ǫ for all z ∈ K.
Almost every point of K is a point of Lebesgue density. So shrinking K, we
can assume there exists an r0 > 0 such that for any z ∈ K and r < r0 , we have
|µ(w) − 1| < ǫ for 99% of the points w ∈ B(z, r)
By the measure-theory Lemma above, for any δ > 0 there is a z ∈ K and
g 6= e in Γ such that g(z) ∈ K and |Jg(z) − 1| < δ. (In fact there is a positive
measure set of such z, but only one is necessary to get a contradiction.) Since
g(∞) 6= ∞, we can write g = I ◦ R where I : C → C is a Euclidean isometry
b →C
b is a reflection through a circle S = S(c, s).
and R : C
Now the Möbius transformation g is determined by its 2-jet, g(z), g ′ (z) and
′′
g (z). The first two terms range in a compact set. By taking K small, we can
exclude g from any finite subset of Γ, so g ′′ (z) must be large. But this means
the radius s of S is small. So with a suitable choice of δ, we can assume s ≪ r.
Since Jg(z) = JR(z) = s2 |z − c|−2 is close to one, the point z lies in the annulus
A = {w : s/2 < |w − c| < 2s} about S, which satisfies R(A) = A.
But it is clear that R sends the parallel linefield on A to a linefield that is
very far from parallel. On the other hand, g(A) = I(R(A)) = I(A) is isometric
to A, so it still has diameter 2s ≪ r and it contains g(z) ∈ K. Thus µ|A and
µ|g(A) are both nearly 1, which is impossible.
Notes.
1. Sullivan’s proof appears in [Sul2]; see also [Ot, Ch. 7]. One of its first
applications, as explained in [Ot], was in the endgame of Thurston’s construction of hyperbolic structures on 3-manifolds that fiber over the circle.
For a survey of the ergodic theory of Kleinian groups, see [Sul3].
2. Attached to any measurable dynamical system (Γ, E) there is a von Neumann algebra A. To construct A, one first forms a bundle of Hilbert
spaces H → E/Γ whose fiber over Γx is ℓ2 (Γx). Then A is the space of
L∞ sections of the bundle of operator algebras B(H).
One can also describe A as a space of matrices of the form T = (Txy )
with x, y ∈ E, such that Txy = 0 unless
P x and y lie in the same orbit.
Composition is defined by (ST )xz = y Sxy Tyz .
118
The space L∞ (E) forms the commutative subalgebra of diagonal operators
in A. That is, for each x ∈ E and f ∈ L∞ (E), we have a bounded operator
Fx : ℓ2 (Γx) → ℓ2 (Γx)
defined by Fx (aγx ) = f (γx)aγx , and these fit together to give a section of
B(H). The group Γ also embeds in A, acting by a unitary shift of each
Hilbert space ℓ2 (Γx).
The center of A corresponds to L∞ (E/Γ), so A is a factor (the center is
trivial) iff (Γ, E) is ergodic. It can also be shown that A admits a trace (a
linear functional satisfying tr(ab) = tr(ba) and tr(1) = 1) iff (Γ, E) admits
an invariant measure. In this case, (Γ, E) is said to be a factor of type
II1 .
The proof that Λ supports no Γ-invariant line field (when Γ is finitely
generated) also shows that (Γ, Λ) is an algebra of type III1 — it admits
no invariant measure, and the ‘ratio set’ of Radon-Nikodym derivatives is
dense in R∗ for measure equivalent to Lebesgue.
3. A nice example of an infinitely-generated group Γ which is quasiconformally rigid is the group generated by reflections in a hexagonal packing
of circles in C. Here the quotient Riemann surface Ω/Γ is a countable
union of triply-punctured spheres (corresponding to the interstices in the
packing), so its Teichmüller space is trivial.
A fundamental domain F for Γ is the region above the hemispheres resting
2
on the circles in the hexagonal packing. The set E = F ∩ S∞
is just the
closure of the union of the interstices, and it serves as a fundamental
2
domain for the dissipative part of the action on S∞
. Since m(E ∩ Λ) = 0,
the action on the limit set is conservative, so M (Λ)Γ = 0. Therefore Γ is
rigid.
Using the fact, one can show that circle packings furnish an algorithm
for the construction of Riemann mappings [RS]. This algorithm has been
used to apply conformal mappings to the human brain.
6.13
Sullivan’s bound on cusps
Theorem 6.40 (Sullivan) Let Γ be a nonelementary N generator Kleinian
group. Then the number of cusps of M = H3 /Γ is at most 5N − 5.
The idea of the proof is similar to the proof of Bers’ area theorem, but with
an analytical twist: we allow distributional Beltrami coefficients.
More precisely, let C ⊂ Λ be the countable set of cusps of Γ, i.e. fixed-points
of parabolic elements. Let Md (C) be the vector space of Γ-invariant (−d, 1)forms on C with the quality of measures. That is, µ ∈ Md (C) is locally of the
form µ(z)dz/(dz)d , where µ(z) is a measure supported on C.
Theorem 6.41 For d ≥ 2, we have dim Md (C) = |C/Γ|.
119
b
Proof. We claim that for any cusp c ∈ C,
X
kγ ′ (c)k3 < ∞.
Γ/Γc
Here Γc is the stabilizer of c. Note that γ ′ (c) is well-defined since γ ′ (c) = 1
for γ ∈ Γc . Then kγ ′ (c)k is bounded above by the Euclidean volume of the
horoball (in the ball model for H3 ) resting on γ(c). Since these are disjoint we
get convergence.
Now consider, for c ∈ C, the measure-differential µc = δ(z − c)dz/(dz)d .
Then |µc | transforms by |γ ′ (c)|2+d (the 2 comes from the action on area densities
the sphere), so
XX
γ ∗ µc
µ=
Γc
converges to an element of Md (C) supported on Γc. Since µ’s with different
supports are linearly independent, we obtain the bound on dim Md (C).
Proof of Theorem 6.40. Solving the ∂-equation, we have as usual a cocycle
map δ : Md (C) → H 1 (Γ, Vd ). We claim δ is injective. Indeed, if δµ = 0, then
∂v = µ for some Γ-invariant d-field v = v(z)(d/dz)d . Since the fundamental
solution 1/z to the ∂-equation µ is in L1loc , so is v. Now v is holomorphic on Ω,
so it vanishes there — the Riemann surface Ω/Γ admits no holomorphic vector
fields or d-fields. On the other hand, v also vanishes on the limit set by a variant
of the no-invariant linefields theorem. Thus v = 0.
Taking d = 2, we find
|C/Γ| = dim M2 (C) ≤ dim H 1 (Γ, V2 ) ≤ 5N − 5.
Note. Sullivan’s bound on the number of cusps appears in [Sul1]. (In this
reference, the bound of 5N − 5 is misstated as 5N − 4.)
6.14
The Teichmüller space of a 3-manifold
Let M be a compact 3-manifold. A convex hyperbolic structure on M is a
Riemann metric g of constant curvature −1 such that ∂M is locally convex.
Equivalently, for any homotopy class of path γ between two points in int(M ),
the shortest representative of γ also lies in int(M ).
f → Hn is injective and its image
Given such a metric, the developing map M
is convex. Thus (M, g) can be extended to a complete hyperbolic manifold N
in a unique way. The manifold N = Hn /Γ is geometrically finite and indeed
convex cocompact: that is, the convex core of N , given by
core(N ) = hull(Λ)/Γ ⊂ N,
120
is compact.
Conversely, for any convex cocompact hyperbolic manifold N , a unit neighborhood M of its convex core carries a (strictly) convex hyperbolic structure.
We can complete N to a Kleinian manifold
N = (Hn ∪ Ω)/Γ,
with a complete hyperbolic metric on its interior and a conformal structure on
its boundary. The manifolds M and N are homeomorphic.
In analogy with the Teichmüller space of a Riemann surface, given a compact
oriented 3-manifold M , we can consider the space GF (M ) of all geometrically
finite hyperbolic manifolds marked by M .
A point (f, N ) ∈ GF (M ) is represented by a homeomorphism
f : M → N,
where N is an oriented Kleinian manifold, and f respects orientations. As usual,
two pairs (f1 , N 1 ), (f2 , N 2 ) are equivalent if there is an orientation-preserving
isometry ι : N 1 → N 2 and an h : M → M homotopic to the identity such that
f1
M −−−−→
hy
f2
commutes.
N1
ιy
M −−−−→ N 2
Theorem 6.42 Let M be a compact 3-manifold admitting at least one convex
hyperbolic structure. Then there is a naturally isomorphism
GF (M ) ∼
= Teich(∂M )
given by
(N, f ) 7→ (∂N, f |∂M ).
6.15
Hyperbolic volume
Rθ
Let l(θ) = − 0 log |2 sin t| dt be the Lobachevsky function. An ideal tetrahedron T (α, β, γ) is determined by its dihedral angles, which sum to π.
Theorem 6.43 The hyperbolic volume of T (α, β, γ) is given by l(α) + l(β) +
l(γ).
Idea of the proof.
Corollary 6.44 The regular tetrahedron has maximum volume.
Proof. By Lagrange multipliers, at the maximum of l(α) + l(β) + l(γ) subject
to α + β + γ = π we have l′ (α) = l′ (β) = l′ (γ). Since l′ (θ) determines
| sin θ|, this means sin(α) = sin(β) = sin(γ). By the law of sines, this means the
associated triangle is equilateral.
121
α
γ
γ
β
α
β
α
γ
β
Figure 17. Dissection of an ideal tetrahedron into 6 pieces.
Ideal octahedron, Whitehead link, Apollonian gasket, Scott’s theorem.
Theorem 6.45 Surface groups are LERF.
This means every finitely generated subgroup of π1 (Σg ) comes from a subsurface of a finite-sheeted covering space.
Corollary 6.46 Every closed geodesic on a closed surface is covered by a simple
geodesic on a finite cover.
The proof is based in part on:
Theorem 6.47 H is exhausted by convex regions tiled by right pentagons.
We note that in fact the layers of pentagons surrounding a given one always
form convex regions. Indeed, the total number of edges en and right angles an
around the nth layer satisfies
!
!
!
an+1
2 1
an
=
·
en+1
3 2
en
By Gauss-Bonnet the total number of pentagons pn out to generation n is an −4.
Thus one can easily√compute p1 , p2 , . . . = 1, 11, 51, 201, 761, 2851, 10651, . . . with
pi ∼ Cλi , λ = 2 + 3.
Three dimensions. It is also known that the Bianchi groups SL2 (OD ) are
LERF, and in particular that the figure eight and Whitehead link complements
are LERF. However the proof is much more difficult in 3-dimensions, because a
finitely-generated subgroup of a geometrically finite group need not be geometrically finite. In particular, the proof for the Whitehead link complement does
122
Figure 18. Tiling by right pentagons.
not just follow from commensurability with a reflection group, as indicated in
[Sc].
There are also now examples of 3-manifold groups which are not LERF;
however these examples are torus-reducible.
Question. Is the fundamental group of every compact hyperbolic 3-manifold
LERF?
Question. Is every surface subgroup of a compact hyperbolic 3-manifold represented by a virtually embedded surface?
Remark: Apollonian gasket. The submanifold of M obtained by cutting
along a totally geodesic triply-punctured sphere (the disk spanning one component of W ) has, as its limit sets, the Apollonian gasket.
Remark: Vol3 and volume coincidences. There is a closed hyperbolic
3-manifold whose volume is a rational multiple of the volume of the figure
eight knot complement [JR]. In general, for an arithmetic hyperbolic manifold,
vol(M ) is a rational multiple of ζk (2), where k is the invariant trace field of
M ; but the commensurability class of M depends on the associated quaternion
algebra over k.
In general a quaternion algebra over a quadratic imaginary field is uniquely
determined by specifying the even number of places where it ramifies. It gives
a cocompact lattice unless this set of places is empty, in which case Q ∼
= M2 (k).
7
Holomorphic motions and structural stability
In this section we study holomorphic motions, and their use in constructing
conjugacy for holomorphic dynamical systems.
123
7.1
The notion of motion
b over a pointed complex manifold (Λ, λ0 )
A holomorphic motion of a set A ⊂ C
b
is a map φ : Λ × A → C, written (λ, a) 7→ φλ (a), such that:
1. φλ (a) is injective for each fixed λ;
2. φλ (a) is holomorphic for each fixed a; and
3. φλ0 (a) = a.
Usually we take (Λ, λ0 ) = (∆, 0).
Examples.
1. Given a torsion-free Fuchsian group Γ ⊂ Aut(∆), the map φλ (γ(0)) = γ(λ)
gives a holomorphic motion of A = Γ · 0 over (∆, 0).
2. The natural map sending A = Z⊕Zi to Z⊕λZ gives a holomorphic motion
over (H, i).
b be a finite set, a 6∈ E, and A = E ∪ {a}. Let φλ |E = id and
3. Let E ⊂ C
b − E, a) is the universal covering map.
φλ (a) = π(λ), where π : (∆, 0) → (C
Then φ is a holomorphic motion of A over (∆, 0).
4. Let f : H → H be an earthquake, and let Γ ⊂ Aut(H) be the set of Möbius
transformations that match f on at least one geodesic. Then Γ is not in
general a group, but it does have the property that γ1 ◦γ2−1 is never elliptic
if γ1 6= γ2 in Γ. Therefore λ 7→ γ(λ) is a holomorphic motion of Γ · 0 over
(∆, 0).
b with kµk∞ < 1, and let φλ : C
b →C
b be
5. Let µ be a Beltrami differential on C
the unique quasiconformal map with dilatation λµ fixing (0, 1, ∞). Then
φ gives a holomorphic motion of the whole sphere.
Theorem 7.1 A holomorphic motion of A over (∆, 0) extends uniquely to a
holomorphic and continuous motion of A. For each fixed λ, the map φλ : A →
b extends to a (1 + k)/(1 − k)-quasiconformal homeomorphism of the sphere,
C
k = |λ|.
Topological remarks. Given A ⊂ Y , a continuous motion of A over (T, t0 )
is a continuous map φ : T × A → Y such that φt is injective for each t, and
φt0 = id.
A continuous motion of A need not extend to a continuous motion of A; for
example, the original might not be uniformly continuous, even though T × A
is compact. A simple counter-example is providing by sliding an infinite set of
counters from one end of an abacus to another, moving the later counters faster
and faster.
Also, a continuous motion of a compact set A ⊂ S 2 need not extend to
a motion of S 2 . An counter-example is provided by infinitely braiding A =
124
{0, 1, 2−1, 3−1 , 4−1 , . . .}. If we twist the strands through (1, 1/2) once around
during time [0, 1/2], then those around (1/3, /1/4) once around during time
[1/3, 1/4], etc. we obtain a ‘wild braid’ in S 2 × [0, 1] and hence a motion that
cannot be extended to the sphere. (For a tameness criterion for infinite braids,
see [CJ].)
On the other hand, any continuous motion of a finite set A ⊂ S 2 does
extend — indeed a ‘radial extension’ can be constructed for small time near
each point. Also it is worth noting that there are no “knotted” Cantor sets in
S 2 ; if A ⊂ S 2 is a Cantor set, then any homeomorphism f : A → S 2 extends to
a homeomorphism of S 2 .
7.2
Stability of the Julia set
b→C
b be a holomorphic family over rational maps over a complex
Let f : X × C
manifold X.
Theorem 7.2 The following conditions are equivalent.
1. The number of attracting cycles N (ft ) is constant.
2. The periods of the attracting cycles of ft are locally bounded.
3. Every periodic cycles of ft is attracting, repelling or persistently indifferent.
4. The number of critical points in the Julia set is locally constant.
5. The Julia set J(ft ) moves continuously in the Hausdorff topology.
6. The Julia set J(ft ) moves locally by a conjugating holomorphic motion.
If the critically points are locally given by holomorphic functions ci (t), then these
conditions are equivalent to the functions
F = {t 7→ ftn (ci (t))}
forming a normal family.
The proof is based on extending the holomorphic motion of the repelling periodic
points to a holomorphic motion of the whole Julia set [Mc4, §4]; see also [MSS]
[Ly].
When any of these conditions hold, we say ft (z) is a stable family of rational
maps. The largest open set X stable ⊂ X on which these conditions hold is the
stable regime. Since the set where N (ft ) achieves its maximum is open and
dense, we have:
Theorem 7.3 The stable regime is open and dense for any holomorphic family
of rational maps.
125
Remark. The unstable set X − U can have positive measure by a result of
Rees; see [Rs].
Evidentally the number of attracting cycles is locally constant at f0 if f0 is
expanding, since all critical points are already accounted for. This shows:
Theorem 7.4 If f is expanding then f is stable in Ratd , and hence in any
holomorphic family.
Examples.
1. f (z) = z 2 is expanding; thus J(z 2 + ǫ) is a quasicircle. Note that z 2 and
z 2 + ǫ are not topologically conjugate on the whole sphere, only on their
Julia sets.
2. f (z) = z 2 − 2 is unstable. For example the critical point z = 0 lies in J(f )
but escapes for infinity for z 2 − 2 − ǫ. One can also perturb f slightly to
create attracting cycles of arbitrarily high order.
3. f (z) = z 2 + 1/4 is unstable. In fact under a slight perturbation any point
in K(f ) can be made to lie in the Julia set.
4. f (z) = z 2 − 1 is stable and hyperbolic.
Problem. In the expanding case, reconstruct the topological dynamical system
f : J(f ) → J(f ) from a finite amount of combinatorial data.
Alternative proof that expanding =⇒ stable. Let f0 be an expanding
map, f0 : U0 → V a covering map as before with J(f0 ) ⊂ U0 . We can arrange
that V − U0 is a smoothly bounded domain. We wish to construct a topological
conjugacy between f0 and a small perturbation ft .
To do this, set Ut = ft−1 (V ); then ft : Ut → Vt is also a covering map.
Choose a homeomorphism φ0 : V → V such that φ0 ◦ f0 (z) = ft ◦ φ(z) when
f0 (z) ∈ V − U . Using the lifting property of covering maps, define φn+1 =
ft−1 ◦ φn ◦ f0 on U , and keep its old values on V − U . Then using expansion it
is easy to see T
that φn is uniformly Hölder continuous. Taking a limit and using
the fact that f0−n (V ) = J(f ) is nowhere dense, we obtain a conjugacy φ.
Conjecture 7.5 A rational map f ∈ Ratd or Polyd is stable iff f is expanding.
In the case of degree 2 polynomial, this conjecture implies fcn (0) converges
to an attracting cycle whenever c lies in the interior of the Mandelbrot set and
fc (z) = z 2 + c.
Theorem 7.6 Expanding dynamics is dense in Poly2 iff there is no c such that
J(fc ) has positive measure and carries an fc -invariant linefield.
126
Note: a Beltrami differential µ(z)dz/dz determines a function on the tangent
space at each point, homogeneous of degree zero, by
dz
v(p)
∂
v(p)
= µ(p)
·
dz
∂z
v(p)
p
Thus µ(v) > 0 iff v(p) ∈ R · µ(p). The linefield associated to a Beltrami
differential µ is defined by
µ(v) = µ(p)
b : µ(v) > 0}
Lp = {v ∈ Tp C
on the set where µ(p) 6= 0.
Conjecture 7.7 Any rational map that carries an invariant line field on its
Julia set is double-covered by an integral endomorphism of a complex torus.
7.3
Extending holomorphic motions
We now discuss the problem of extending a holomorphic motion to the whole
sphere. We will prove a theorem from [BR].
b be a holomorphic motion.
Theorem 7.8 (Bers-Royden) Let φ : ∆ × A → C
Then after restricting to the disk of radius 1/3, there is an extension of φ to a
holomorphic motion
b → C.
b
Φ : ∆(1/3) × C
The extended motion can be chosen such that µ(Φt ) is a harmonic Beltrami
b − A, in which case the extension is unique.
differential on C
Recognizing holomorphic motions.
b →C
b be a continuous motion of the sphere such
Theorem 7.9 Let φ : ∆ × C
that φλ is quasiconformal for each λ. Then φλ is a holomorphic motion iff
µλ = µ(φλ ) varies holomorphically as a function of λ.
Moreover, any holomorphically varying kµλ k < 1 arises from a holomorphic motion, unique up to composition with a holomorphically varying Möbius
transformation.
Example. Define
φλ (z) =
(
z + λ/z
z + λz
|z| ≥ 1,
|z| < 1.
Note that φλ maps the unit circle to an ellipse. We have µλ = µ(φλ ) = λdz/dz
on ∆ on µ = 0 elsewhere, so µλ varies holomorphically.
The Ahlfors-Weill extension as a holomorphic motion. Let X be the
ball of radius 1/2 in the space of L∞ holomorphic quadratic differential φ on
H. Then X has the structure of an infinite-dimensional complex manifold. To
127
b which fixes
each φ ∈ X we can associate the unique univalent map fφ : H → C
(0, 1, ∞) and satisfies Sf = φ. Thus we obtain a holomorphic motion
b
F :X ×H→C
over (X, 0) defined by F (φ, z) = fφ (z).
Now the Ahlfors-Weill extension prolongs F to a motion of the whole sphere,
which we continue to denote by F . Examining equation 2.2 we see that for fixed
z ∈ −H, the extension g(z) = Mz (z) is a holomorphic function of f , and hence
of φ. Thus the Ahlfors-Weill extension not only prolongs f , it prolongs the
‘universal’ holomorphic motion of H, by (suitably bounded) univalent functions,
to a motion of the whole sphere.
Proof of the Bers-Royden Theorem 7.8. First consider the case where
b − φλ (A) defines a holomorphic path
the moving set A is a finite. Then Yλ = C
in Teich(X), X = Y0 . By the Schwarz lemma, ∆(1/3) maps under the Bers
embedding to a holomorphically varying family of quadratic differentials φλ in
the ball of radius 1/2 in P (X). Thus there is a canonical quasiconformal map
fλ : X → Yλ . Its dilatation is given by
µ(fλ ) = ρ−2
X φλ (z),
b
so it varies holomorphically and thus fλ defines a holomorphic motion of C.
To handle the general case, exhaust A by a sequence of dense and denser
finite sets.
Sections of the universal curve. The universal curve over Teichmüller space
is the complex fiber bundle Cg → Tg such that the fiber over [Y ] is Y itself. More
precisely, the universal curve is the quotient of Tg,1 by the subgroup π1 (Σg ) ⊂
Modg,1 coming from the kernel of the map Modg,1 → Modg . Alternatively, Cg
is the pullback of the natural fibration Mg,1 → Mg under the covering map (of
orbifolds) Tg → Mg .
From [Hub] we have following result.
Theorem 7.10 There is no holomorphic section of the universal curve over
Cg → Tg over Teichmüller space when g ≥ 3.
Sketch of the proof. A section of the universal curve lifts to a section s :
Tg → Tg,1 inverting the natural projection. Since the Teichmüller metric and
the Kobayashi metric coincide (Royden), s is an isometry. It follows that there
exists, for any X ∈ Tg and p = s(X) ∈ X, a unit-norm projection
P : Q(X − {p}) → Q(X)
(dual to the derivative of s at X). (Note that Q(X) naturally forms a subspace
of Q(X − {p}), namely the subspace of differentials holomorphic at p.) Using
Riemann-Roch and a differentiability argument, one shows such a projection
cannot exist.
128
Remark. For genus 2, the 6 Weierstrass points provide sections.
Corollary 7.11 There exists a holomorphic motion
b
φ : U × (−H) → C
where U ⊂ Cn is a bounded domain of holomorphy, that cannot be extended to
a holomorphic motion of the sphere.
Proof. Let U = Tg ∼
= Teich(X). Using the construction of the Bers embedb with continding, for each Y ∈ Tg we obtain a univalent map fY : (−H) → C
uous boundary values. This gives the desired holomorphic motion, by setting
φ(Y, z) = fY (z). If it could be extended to the whole sphere, then for z ∈ H
we would have s(Y ) = φ(Y, z) ∈ ΩY . Passing to the quotient Y = ΩY /ΓY , we
would then obtain a section of the universal curve Cg → Tg , a contradiction.
Slodkowski’s theorem.
b extends to a holomorphic
Theorem 7.12 A holomorphic motion φ : ∆×A → C
motion of the whole sphere. The extension can be made equivariant in a suitable
sense.
See [Sl], [Dou]
7.4
Stability of Kleinian groups
We now turn to the notion of structural stability in families of Kleinian groups.
See [Bers3] and [Sul5] for more details.
b
Families of groups. A holomorphic family of representations (into Aut C)
over a complex manifold X is a map
b
ρ : X × G → Aut C,
where G is an abstract group, ρt (g) is a holomorphic function of t for each
b is a homomorphism of groups for each t ∈ X.
g ∈ G, and ρt : G → Aut C
Two representations ρs and ρt are quasiconformally conjugate if there is a
b →C
b such that φ ◦ ρs (g) = ρt (g) ◦ φ for every g ∈ G.
quasiconformal map φ : C
The next result shows faithfulness is enough to prove a strong form of structural stability.
b be a holomorphic family of faithful
Theorem 7.13 Let ρ : X × G → Aut C
representations over a connected complex manifold X. Then ρs and ρt are
quasiconformally conjugate for all s, t ∈ X.
b be elements other than the identity, and let
Lemma 7.14 Let g, h ∈ Aut C
G = hg, hi be the subgroup they generate. Then exactly one of the following
possibilities holds.
129
1. G ∼
= Z/2 × Z/2. Then the fixed-points of g and h are disjoint.
2. G is an abelian group other than Z/2 × Z/2. Then the fixed points sets of
g and h coincide.
3. [G, G] is an infinite, torsion-free group of parabolics. Then g and h share
exactly one fixed-point.
4. G is none of the above. Then the fixed-points of g and h are disjoint.
Proof. First suppose the fixed-points of g and h coincide. Then it is easy to
see G is abelian and not isomorphic to Z/2 × Z/2. So the Lemma holds in this
case.
Now suppose g and h share one but not all fixed-points. (In particular they
are not both parabolic). Normalizing so the common fixed-point is at z = ∞,
we can assume G lies in the solvable subgroup of affine linear maps Aut C.
In particular, G is solvable, and [G, G] is an infinite torsion-free subgroup of
parabolic transformations. So the Lemma holds in this case as well.
Finally suppose g and h share no fixed-points. If G is abelian then g must
interchange the fixed-points of h, and similarly h must interchange the fixedpoints of g. Thus g 2 = h2 = 1 and G ∼
= Z/2 × Z/2. Next suppose [G, G] is
an infinite, torsion-free abelian group. Then [G, G] cannot consist entirely of
parabolics; otherwise they would all share the same fixed-point p, which would
also be fixed by g and h since [G, G] is normal. Thus G falls into the case ‘none
of the above’, and the Lemma is true in the case as well.
Isomorphic groups with different actions. The groups
G1
=
G2
=
hz 7→ z + 1, z 7→ −zi,
hz 7→ 2z, z 7→ 1/zi
are both isomorphic to Z/2 ⋉ Z, but they have different fixed-point structures.
The generators of G1 have a common fixed-point and those of G2 do not. This
is the one instance where the isomorphism type of G does not determine the
fixed-point structure.
Proof of Theorem 7.13. Since X is connected, it suffices to prove the theorem
locally. Thus we can restrict to the case where X = ∆.
Notice ρt (g) is parabolic for one value of t iff it is parabolic for all values. Otherwise tr ρt (g) would be a nonconstant holomorphic function passing through
the value 2; but then for some s and s we would have tr ρs (g) = 2 cos(π/n),
which implies ρs (g n ) = 1, contradicting faithfulness.
Let Λt be the closure of the fixed points of the elements of Γt = ρt (G)
other than the identity. Then Λt is a closed, Γt -invariant set. Since ρt (g) is
parabolic iff ρ0 (g) is parabolic, the fixed-points of individual elements move
holomorphically. By the preceding Lemma, fixed-points of g and h coincide for
ρ0 iff they coincide for all ρt . Thus Λt moves by a holomorphic motion, which
is also a conjugacy for the action of Γt .
130
b Λt = Ωt is free. Thus if |Λt | < 3, we can extend it by
The action of Γt on C−
an orbit of Γt until |Λt | ≥ 3 and it is still moving by a holomorphic conjugacy.
b →C
b be the Bers-Royden extension of the motion
Now let φt : ∆(1/3) × C
of Λt . For any g ∈ G, the holomorphic motion
ψt = ρt (g)−1 ◦ φt ◦ ρ0 (g)
is also an extension of the motion of Λt , with µ(ψt ) harmonic. Since the BersRoyden extension is unique subject to this condition, we have ψt = φt .
In other words, by naturality the Bers-Royden extension commutes with the
action of G, and therefore it provides a quasiconformal conjugacy between ρ0
and ρt whenever |t| < 1/3. This proves the Theorem locally, and the global
version follows from connectedness of X.
Here is a variant:
b be a holomorphic family of representations
Theorem 7.15 Let ρt : G → Aut C
over a connected base X. If ρt (G) is discrete and nonelementary for all t, then
all the representations are quasiconformally conjugate.
Representation varieties. Fix a finitely-generate group G. Let us suppose
G is non-elementary; that is, any abelian subgroup has infinite index.
Let V(G) denote the algebraic variety of irreducible representations ρ : G →
b modulo conjugacy. The functions g 7→ tr ρ(g) provide a smooth embedAut C
ding of V(G) into affine space. Let AH(G) ⊂ V(G) denote the subset of discrete,
faithful representations. Let CC(G) ⊂ AH(G) denote the set of faithful representations whose image is a convex cocompact Kleinian group. It is easy to see
that CC(G) is open, and in fact each component of CC(G) is parameterized by
an appropriate Teichmüller space.
We can now formulate a central conjecture, analogous to the density of
expanding rational maps in Ratd .
Conjecture 7.16 Suppose G does not contain Z ⊕ Z. Then CC(G) is dense
in AH(G).
It is certainly not true in general that AH(G) is dense in V(G). Indeed, if
any component of V(G) has positive dimension, then a trace is non-constant
there, which leads to an open set of indiscrete groups. In fact we have the
following basic result:
Theorem 7.17 The set of discrete faithful representations AH(G) ⊂ V(G) is
closed.
Structural stability implies hyperbolicity. Because of the quasiconforb is
mal conjugacy result, it is natural to say that a Kleinian group Γ ⊂ Aut C
b
structurally stable if all representations ρ : Γ → Aut C close to the identity are
injective — there are no new relations.
Equivalently, the structurally stable groups correspond to the interior of
AH(G). We then have:
131
Theorem 7.18 (Sullivan) A structurally stable finitely-generated Kleinian group
Γ is convex cocompact.
Corollary 7.19 The set CC(G) coincides with the interior of AH(G).
In other words, we do not yet know that structural stability is dense (in
AH(G)), but we do know that structural implies hyperbolicity (i.e. the expanding property of G on its limit set).
Cusps. We remark that many important groups — since as the fundamental
groups of knot complements — do contain Z ⊕ Z. For these groups CC(G) is
empty, even though AH(G) may not be. To formulate an appropriate result in
this setting, one must restrict to the representations where the Z ⊕ Z subgroups
are parabolic.
Quasifuchsian groups. To explain Sullivan’s result, we will treat the case of
a surface group, G = π1 (S) where S is a closed surface of genus g ≥ 2.
Theorem 7.20 A structurally stable Kleinian group isomorphic to π1 (S) is
quasifuchsian.
First we need some topological arguments to recognize a quasifuchsian group.
Theorem 7.21 The limit set of any Kleinian group Γ ∼
= π1 (S) is connected.
Proof. Write S = H2 /ΓS , take a smooth homotopy equivalent S → M = H3 /Γ
and lift it to an equivariant map f : H2 → H3 . Pick any basepoint p ∈ H2 .
2
of f (H)
Since f has a compact fundamental domain, the limit points in S∞
coincide exactly with the limit set Λ(Γ). Since f is proper, we have
\
2
Λ(Γ) =
f (H − B(p, R)) ⊂ H3 ∪ S∞
.
R>0
This expression presents Λ(Γ) as a nested intersection of connected sets, so it is
connected.
Theorem 7.22 Suppose Γ ∼
= π1 (S) has two invariant components in its domain
of discontinuity. Then Γ is quasifuchsian.
Proof. Let M = (H3 ∪ Ω)/Γ. Since the limit set is connected, ∂M is incompressible. By assumption, there are two compact components X0 and X1 in ∂M
such that the inclusion of each is a homotopy equivalence. By taking a homotopy
from X0 to X1 , we obtain a degree-one homotopy equivalence f : S × [0, 1] → M
sending S × {i} to Xi . Thus M is compact and ∂M = X0 ∪ X1 .
At this point we know Γ is convex cocompact. To prove Γ is quasifuchsian,
one can appeal to theorems in 3-dimensional topology that show M is homeomorphic to S × I (cf. [Hem, Ch. 10]).
132
Compare [Msk].
Proof of Theorem 7.20. Let ρ0 : G = π1 (S) → Γ be a point in V(G)
representing Γ. By assumption, all ρt close enough to ρ are quasiconformally
conjugate to ρ0 .
By counting dimensions (2g generators, one relation, and one more conjugating element), we have
b = 6g − 6.
dimC V(S) = (2g − 2) dim Aut C
Since ρ0 is structurally stable, 6g − 6 agrees with the dimension of the Teichmüller space of Γ. Thus, letting X = Ω/Γ, we have
b Γ) = dim Teich(X).
6g − 6 = dim Teich(C,
By structurally stability, Γ has no parabolics. By the Ahlfors finiteness theorem, X is a closed surface. Therefore dim Teich(X) = 3|χ(X)|, which implies
χ(X) = 2χ(S).
Each component Xi ⊂ X can be expressed as Ωi /Γi , where Γi is the stabilizer
of a component of Ωi of Ω.PSince Γi ∼
= π1 (Xi ) is not a free group, it must have
finite index di in Γ. Then
di = 2 since χ(X) = 2χ(S).
In the case 1 + 1 = 2 we have a quasifuchsian group by the preceding Theorem. To rule out the case 2 = 2, note that in this case Γ1 is a quasifuchsian
subgroup of index two in Γ. Then M is homeomorphic to a properly twisted
I-bundle over S. But M is orientable, as is S, so the I-bundle must be trivial.
Components of the CC(G). In general the compact hyperbolic manifold
M has a constant homeomorphism type on each component U of CC(G) =
int AH(G), while manifolds in different components of CC(G) are homotopy
equivalent but not homeomorphic. Thus the classification of components of
CC(G) is bound up in the classification of homeomorphism types of 3-manifolds
with a fixed homotopy type.
For G = π1 (S) only one (orientable) homeomorphism type arises (S × I),
but in general there are many possibilities, coming from different ways in which
π1 (∂M ) may be deployed in π1 (M ).
A similar situation arises already for surfaces; a pair of pants and a torus with
one boundary component are also homotopy equivalent but not homeomorphic.
7.5
Cusped tori
In this section we give an example of the shape of the domain of locally faithful
representations in a holomorphic family.
The representation variety and simple closed curves. Let S be a compact surface of genus g = 1 with n = 1 boundary component. We will study
representations of the free-group
G = ha, bi ∼
= π1 (S),
133
subject to the relation that ρ([a, b]) is parabolic. Geometrically, this condition
forces ∂S to be realized as a cusp.
The traces (α, β, γ) of
(A, B, AB) = (ρ(a), ρ(b), ρ(ab))
determine ρ up conjugacy (when it is irreducible). In particular, the trace of
the commutator can be calculated from the relation
tr(A)2 + tr(B)2 + tr(AB)2 = tr(A) tr(B) tr(AB) + tr[A, B] + 2.
Imposing the condition tr[A, B] = −2 reduces one to a hypersurface
V0 (G) ⊂ C3
defined by the equation
α2 + β 2 + γ 2 = αβγ.
(7.1)
This slice of the representation variety of the group G contains a copy of the
quasifuchsian space QF(S), where S is a torus with one boundary component.
Note that once α and β are specified, there are two choices for γ. But these
two choices are related by the change of basis A 7→ A−1 . This change of basis
preserves tr A and tr B but changes tr AB to tr A−1 B. These two traces are
related by the important equation
tr AB + tr A−1 B = tr A tr B,
(7.2)
coming from the relation A + A−1 = (tr A)I.
It is a useful coincidence that SL2 (Z) is both a Fuchsian group and the
mapping-class group of a punctured torus. Thus SL2 (Z) acts transitively on
pairs of generators of π1 (S). The generators themselves correspond bijectively
to simple closed curves on S, which in turn correspond to lines of rational slope
in H1 (S, R). Passing to projective space, we can identify the space of slopes
with the rational points (union infinity) on the boundary of the upper halfplane.
Then the action of Mod(S) on PH1 (S, R) goes over to the usual action of SL2 (Z)
b
on R.
The standard generators ( 10 11 ) and ( 11 01 ) for SL2 (Z) act by the automorphism
of G given by:
ha, bi → ha, abi andha, bi → hab, ai.
Using equation (7.2), we obtain simple expressions for the action of SL2 (Z) =
Mod(S) on V(S) ⊂ C3 , namely:
(α, β, γ) 7→ (α, γ, αγ − β) and(α, β, γ) 7→ (γ, β, βγ − α).
Now for any slope s ∈ Q ∪ {∞}, there is a unique pair of conjugacy classes
w∈G∼
= π1 (S) represented by simple closed curves of slope s. (There is a pair
because w and w−1 have the same slope.) It turns out that we have
Tr ρ(w) = Ps (α, β, γ),
134
where Ps is a polynomial. This polynomial, and the words w representing a given
slope, are easily computed recursively using the action of SL2 (Z). Namely, to
compute Ps we find an element T ∈ SL2 (Z) sending s to 0; then we compute
the polynomial action of T on V(S); and finally we observe that Ps (α, β, γ) is
nothing more than the first coordinate of T .
The standard tiling of the unit disk by ideal triangles is a convenient way to
organize this computation. Starting with a pair of triangles forming a quadrilateral, we recursively fill out the hyperbolic plane by inserting reflection through
the edges. Each time a new triangle is added along an edge E, the element w of
the free group for the new vertex v is the product of the elements at the vertices
of E. The trace of the new element is determined by the (previously calculated)
traces of other three elements on the vertices of the quadrilateral with diagonal
E. Finally the slope p/q of w is determined from the slopes a/b and c/d of the
words at the vertices of E by Farey addition:
p
a+c
=
·
q
b+d
In is thus straightforward to calculate Ps (α, β, γ) for any rational slope s = p/q.
A
A^2B
AB
AB^{−1}
AB^2
B
Figure 19. Farey triangles. We have tr AB −1 + tr AB = tr A tr B.
The Maskit slice. To reduce to a 1-dimensional space, let us impose the
condition β = tr(B) = 2. Then the only essential remaining free parameter is
α = tr(A) ∈ C. More precisely, for every value of α there are two possible values
of γ, but for β = 2 equation (7.1) factors as
(γ − α)2 = −4,
so we can uniformly choose γ = α + 2i.
Indeed, once we have chosen
β = 2 and γ = α + 2i,
we can go further and obtain an explicit family of representations
ρα : G → Aut C,
135
α ∈ X = C, given by the matrices:
!
0 i
A
=
,
i α
!
0
i
AB =
,
i α + 2i
B
=
[A, B] =
1 2
!
,
0 1 !
1 −2
2 −3
.
Note that B and [A, B] together generate a Fuchsian subgroup of Γα =
ρα (G). In fact they generate the congruence subgroup Γ(2) ⊂ SL2 (Z), which
b − {0, 1, ∞}. This comes from the fact that the condition
uniformizes X = C
tr(B) = 2 pinches a loop on the torus to a cusp, resulting in one boundary component becoming a triply-punctured sphere. Thus the limit set Λ(Γα ) contains
a tree of circles, one for each conjugate of Γ(2) inside Γα . Its domain of discontinuity Ω consists of a single invariant component together with a countable
collection of round disks (see Figure 20).
Figure 20. Limit set for Γα in Maskits’ embedding of T1,1 . The unbounded
domain uniformizes a punctured torus; the round disks, triply-punctured spheres.
The regime T ⊂ C where ρα is locally faithful is parameterized by the Teichmüller space of X = Ω/Γ. It turns out that X consists of a triply-punctured
sphere (with no moduli) and a once-punctured torus. Then T is a natural model
for T1,1 , namely Maskit’s embedding of Teichmüller space.
What does the domain T look like? To find T , we can look for solutions to
the polynomial equation Qs (α) = Ps (α, β, γ) as s ranges over Q ∪ {∞}. The
roots of Qs (α) are definitely outside T , since near these points ρα (w) becomes
parabolic for a word w ∈ G of slope s.
A plot of those points is shown in Figure 21. The zeros of Ps (α) as s varies
over many rational slopes, give rise to the points below the cusped curve in
Figure 21. The cusped curve itself, which forms the boundary of the stable
regime T , is obtained by connecting together the ‘highest’ zeros. (One should
take this terminology with a grain of salt, since the curve is not a graph — in
136
2.0
0.0
Figure 21. Faithful representations. Dots represent relations.
137
fact it winds an infinite amount around most boundary points that correspond
to quadratic irrationals.)
Notes. The case of punctured-torus groups we examine above has been muchstudied. See, for example, [Wr], [MMW], [Mc5, §3.7], [KS1], [KS2].
7.6
Structural stability of rational maps
We now turn to the study of stability for families of rational maps on the
Riemann sphere.
Definitions. Let X be a complex manifold. A holomorphic family of rational
b → C,
b given by (λ, z) 7→ fλ (z).
maps fλ (z) over X is a holomorphic map X × C
top
Let X
⊂ X be the set of topologically stable parameters. That is, α ∈ X top
if and only if there is a neighborhood U of α such that fα and fβ are topologically
conjugate for all β ∈ U .2
The space X qc ⊂ X top of quasiconformally stable parameters is defined similarly, except the conjugacy is required to be quasiconformal.
Let X0 ⊂ X be the set of parameters such that the number of critical points
of fλ (counted without multiplicity) is locally constant. For λ ∈ X0 the critical
points can be locally labeled by holomorphic functions c1 (λ), . . . , cn (λ). Indeed,
X0 is the maximal open set over which the projection C → X is a covering
space, where C is variety of critical points
b : f ′ (c) = 0}.
{(λ, c) ∈ X × C
λ
A critical orbit relation of fλ is a set of integers (i, j, a, b) such that f a (ci (λ)) =
f b (cj (λ)); here a, b ≥ 0.
The set X post ⊂ X0 of postcritically stable parameters consists of those λ
such that the set of critical orbit relations is locally constant. That is, λ ∈ X post
if any coincidence between the forward orbits of two critical points persists
under a small change in λ. This is clearly necessary for topologically stability,
so X top ⊂ X post .
The main result of this section, whose proof is completed in the next, is:
Theorem 7.23 In any holomorphic family of rational maps, the topologically
stable parameters are open and dense.
Moreover the structurally stable, quasiconformally stable and postcritically
stable parameters coincide (X top = X qc = X post ).
This result was anticipated and nearly established in [MSS, Theorem D]. It
is completed in [McS].
Definition. Let fλ (z) be a holomorphic family of rational maps over (X, x).
A holomorphic motion respects the dynamics if it is a conjugacy: that is, if
φλ (fx (a)) = fλ (φλ (a))
whenever a and fx (a) both belong to A.
2 In the terminology of smooth dynamics, these are the structurally stable parameters in
the family X.
138
Theorem 7.24 For any x ∈ X post , there is a neighborhood U of x and a holomorphic motion of the sphere over (U, x) respecting the dynamics.
Proof. Choose a polydisk neighborhood V of x in X post . Then over V the
critical points of fλ can be labeled by distinct holomorphic functions ci (λ). In
other words,
{c1 (λ), . . . , cn (λ)}
defines a holomorphic motion of the critical points of fx over V .
The condition of constant critical orbit relations is exactly what we need to
extend this motion to the forward orbits of the critical points. That is, if we
specify a correspondence between the forward orbits of the critical points of fx
and fλ by
fxa (ci (x)) 7→ fλa (ci (λ)),
the mapping we obtain is well-defined, injective and depends holomorphically
on λ.
Next we extend this motion to the grand orbits of the critical points. There
is a unique extension compatible with the dynamics. Indeed, consider a typical
point where the motion has already been defined, say by q(λ). Let
π
b −−−
Z = {(λ, p) : fλ (p) = q(λ)} ⊂ V × C
−→ V
be the graph of the multivalued function fλ−1 (q(λ)). If q(λ) has a preimage under
fλ which is a critical point ci (λ), then this critical point has constant multiplicity
and the graph of ci forms one component of Z. The remaining preimages of q(λ)
have multiplicity one, and therefore π −1 (λ) has constant cardinality as λ varies
in V . Consequently Z is a union of graphs of single-valued functions giving a
holomorphic motion of fx−1 (q(x)).
The preimages of q(λ) under fxn are treated similarly, by induction on n,
giving a holomorphic motion of the grand orbits compatible with the dynamics.
By the λ-lemma, this motion extends to one sending Pb(x) to Pb (λ), where
b
P (λ) denotes the closure of the grand orbits of the critical points of fλ .
If |Pb(x)| ≤ 2, then fλ is conjugate to z 7→ z n for all λ ∈ V ; the theorem is
easy in this special case. Otherwise Pb(x) contains the Julia set of fx , and its
complement is a union of hyperbolic Riemann surfaces.
To conclude the proof, we apply the Bers-Royden Harmonic λ-lemma to
extend the motion of Pb (x) to a unique motion φλ (z) of the whole sphere, such
b − Pb (x). This
that the Beltrami coefficient µλ (z) of φλ (z) is harmonic on C
motion is defined on a polydisk neighborhood U of x of one-third the size of V .
For each λ in U the map
b − Pb (λ)) → (C
b − Pb (λ))
fλ : (C
is a covering map. Define another extension of the motion to the whole sphere
by
ψλ (z) = fλ−1 ◦ φλ ◦ fx (z),
139
b − Pb(x) and the branch of the inverse is chosen continuously so that
where z ∈ C
ψx (z) = z. (On Pb(x) we set leave the motion the same, since it already respects
the dynamics).
The rational maps fλ and fx are conformal, so the Beltrami coefficient of
ψλ is simply fx∗ (µλ ). But fx is a holomorphic local isometry for the hyperbolic
b Pb (x), so it pulls back harmonic Beltrami differentials to harmonic
metric on C−
Beltrami differentials. By uniqueness of the Bers-Royden extension, we have
ψλ = φλ , and consequently the motion φ respects the dynamics.
Corollary 7.25 The postcritically stable, quasiconformally stable and topologically stable parameters coincide.
Proof. It is clear that X qc ⊂ X top ⊂ X post . By the preceding theorem, if
x ∈ X post then for all λ in a neighborhood of x we have φλ ◦ fλ = fx ◦ φλ ,
where φλ (z) is a holomorphic motion of the sphere. By the λ-lemma, φλ (z) is
quasiconformal, so X post ⊂ X qc .
Remark. The monodromy of holomorphic motions in non-simply connected
families of rational maps can be quite interesting; see [Mc1], [Mc2], [GK], [BDK]
and [Br].
7.7
Postcritical stability
To establish the density of structural stability, we must bridge the gap between
J-stability (discussed in §7.2) and postcritical stability. We will show that X post
is only slightly smaller than X stable , so it too is dense. Since X post = X top =
X qc , the proof of Theorem 7.23 is completed by:
Theorem 7.26 The postcritically stable parameters are open and dense in the
set of J-stable parameters.
Proof. Using Corollary 7.25, we have X post ⊂ X stable because X post = X top
and topological conjugacy preserves the number of attracting cycles. By definition X post is open, so it only remains to prove it is dense in X stable .
Let V ∼
= ∆m ⊂ X stable be any polydisk on which number of critical points of
fλ is constant. The advantage of working on V is that we can label the critical
b i = 1, . . . , n.
points of fλ (z) by holomorphic functions ci : V → C,
Fixing i and j, we will show there is an open dense subset of V on which
the critical orbit relations between i and j are constant. This will suffice to
complete the proof, since the intersection of a finite number of open dense sets
is again open and dense.
Since V is a simply-connected subset of the J-stable regime, over V the
dynamics on the Julia set is canonically trivialized. In particular, the critical
points in the Julia set remain there and their critical orbit relations are constant.
So we may assume ci and cj lie outside the Julia set.
140
For any κ, λ ∈ V , there is a canonical correspondence between the components of the Fatou sets Ω(fκ ) and Ω(fλ ). This correspondence commutes with
the induced dynamics on the set of components. It also preserves the types of
periodic components, except that an attracting component may become superattracting or vice-versa.
We begin by considering the case i = j. Suppose the relation f a (ci ) = f b (ci )
for some a < b holds throughout V . Then there are only a finite number of
possibilities for the set of all critical self-relations of ci . Each self-relation either
holds throughout V or on a proper complex-analytic subset of V . Thus there is
an open dense set — the complement of a complex subvariety — on which the
self-relations of ci are constant.
Next suppose the relation f a (ci ) = f b (ci ) holds at λ0 ∈ V but not throughout V . Then there exists a periodic point p(λ) such that f b (ci ) = p for λ = λ0 .
The point p is the center of an attracting or superattracting basin, or a Siegel
disk. By assumption, the relation f b (ci ) = p only holds on a proper analytic
subvariety W ⊂ V . For all λ ∈ V − W near λ0 , the forward orbit of the critical
point lands near but not on the center of the basin. Thus ci has an infinite
forward orbit for such λ, and in particular its self-relations are constant on an
open dense set.
Finally it may be that no relation of the form f a (ci ) = f b (ci ) ever hold in
V . Then the forward orbit of ci is always infinite and the set of self-relations is
constant in this case as well.
Since we have shown the regime where the self-relations among critical points
are constant is open and dense, we may now replace V with a polydisk contained
in this regime.
Now consider two critical points ci , cj , i 6= j, lying outside of the Julia set.
Suppose there is a critical point relation f a (ci ) = f b (cj ) for λ = λ0 . Then ci
either both have infinite orbits or both have finite orbits. In the latter case,
only a finite number of patterns of orbit relations are possible. In the former
case, if the given relation holds throughout V then again only a finite number
of patterns are possible. In either case on such pattern holds outside a complex
subvariety of V , and hence on an open dense set.
So we are finally reduced to the case where ci and cj both have infinite forward orbits, and the relation f a (ci ) = f b (cj ) holds only on a proper subvariety
W ⊂ V containing λ0 . To complete the proof, we will show there is an open set
U with λ0 ∈ U such that ci and cj have no orbit relations for λ ∈ U .
Increasing a and b if necessary, we can assume the point
p = fλa0 (ci (λ0 )) = fλb0 (cj (λ0 ))
lies in a periodic component of the Fatou set. If this periodic component is an
attracting, superattracting or parabolic basin, we may assume that p lies close
to the corresponding periodic cycle.
In the attracting and parabolic cases, we claim there is a ball B containing
p such that for all λ sufficiently close to λ0 , the sets
hfλn (B) : n = 0, 1, 2, . . .i
141
are disjoint and fλn |B is injective for all n > 0. This can be verified using the
local models of attracting and parabolic cycles. Now for λ near λ0 but outside
the subvariety where (∗) holds, fλa (ci (λ)) and fλb (cj (λ)) are distinct points in B.
Thus ci (λ) and cj (λ) have disjoint forward orbits and we have shown λ0 is in
the closure of the interior of Vij .
In the superattracting case, this argument breaks down because we cannot
obtain injectivity of all iterates of fλ on a neighborhood of p. Instead, we will
show that near λ0 , ci and cj lie on different leaves of the canonical foliation of
the superattracting basin, and therefore have distinct grand orbits.
To make this precise, choose a local coordinate with respect to which the dynamics takes the form Z 7→ Z d . More precisely, if the period of the superattracting cycle is k, let Zλ (z) be a holomorphic function of (λ, z) in a neighborhood
of (λ0 , p), which is a homeomorphism for each fixed λ and which satisfies
Zλ (fλk (z)) = Zλd (z).
(The existence of Z follows from classical results on superattracting cycles; cf.
[CG, §II.4].) Since (∗) does not hold throughout V , there is a neighborhood V
of λ0 on which
Zλ (fλa (ci (λ))) 6= Zλ (fλb (cj (λ)))
unless λ = λ0 . Note too that neither quantity vanishes since each critical point
has an infinite forward orbit. Shrinking V if necessary we can assume
|Zλ (fλa (ci (λ)))|d < |Zλ (fλb (cj (λ)))| < |Zλ (fλa (ci (λ)))|1/d
for λ ∈ V . If we remove from V the proper real-analytic subset where
|Zλ (fλa (ci (λ)))| = |Zλ (fλb (cj (λ)))|,
we obtain an open subset of Vij with λ0 in its closure. (Here we use the fact
that two points where log log(1/|Z|) differs by more than zero and less than
log d cannot be in the same grand orbit.)
Finally we consider the case of a Siegel disk or Herman ring of period k. In
this case, for all λ ∈ V , the forward orbit of ci (λ) determines a dense subset
of Ci (λ), a union of k invariant real-analytic circles. This dynamically labeled
subset moves injectively as λ varies, so the λ-lemma gives a holomorphic motion
b
φ : V × Ci (λ0 ) → C,
which respects the dynamics. For each fixed λ, φλ (z) is a holomorphic function
of z as well, since fλ is holomorphically conjugate to a linear rotation in domain
and range.
By assumption, fλb (cj (λ)) ∈ Ci (λ) when λ = λ0 . If this relation holds on an
open subset V of V , then
b
g(λ) = φ−1
λ (fλ (cj (λ)))
is a holomorphic function on V with values in Ci (λ0 ), hence constant. It follows
that (∗) holds on V , and hence on all of V and we are done. Otherwise, ci (λ)
142
and cj (λ) have disjoint forward orbits for all λ outside the proper real-analytic
subset of V where fλb (cj (λ)) ∈ Ci (λ).
From the proof we have a good qualitative description of the set of points
that must be removed to obtain X top from X stable .
Corollary 7.27 The set X stable is the union of the open dense subset X top and
a countable collection of proper complex and real-analytic subvarieties. Thus
X top has full measure in X stable .
The real-analytic part occurs only when fλ has a foliated region (a Siegel
disk, Herman ring or a persistent superattracting basin) for some λ ∈ X stable .
Corollary 7.28 If X is a connected J-stable family of rational maps with no foliated regions, then X post is connected and π1 (X post ) maps surjectively to π1 (X).
Proof. The complement X − X post is a countable union of proper complex
subvarieties, which have real codimension two.
7.8
No invariant line fields
In this section we formulate a conjecture about the ergodic theory of a single
rational map which implies the density of hyperbolicity.
Let X = C/Λ be a complex torus; then X also has a group structure coming
b be a degree two holomorphic map to
from addition on C. Let ℘ : X → C
the Riemann sphere such that ℘(−z) = ℘(z); such a map is unique up to
b and can be given by the Weierstrass ℘-function.
automorphisms of C
Let F : X → X be the endomorphism F (z) = nz for some integer n > 1.
Since n(−z) = −(nz), there is a unique rational map f on the sphere such that
the diagram
F
C/Λ −−−−→ C/Λ
℘y
℘y
b
C
f
−−−−→
b
C
commutes. (Compare [Lat].)
Definition. A rational map f is double covered by an integral torus endomorphism if it arises by the above construction.
It is easy to see that repelling periodic points of F are dense on the torus,
and therefore the Julia set of f is equal to the whole sphere. Moreover, F and
z 7→ −z preserve the line field tangent to geodesics of a constant slope on X
(or more formally, the Beltrami differential µ = dz/dz), and therefore f has an
b
invariant line field on C.
Conjecture 7.29 (No invariant line fields) A rational map f carries no invariant line field on its Julia set, except when f is double covered by an integral
torus endomorphism.
143
Theorem 7.30 The no invariant line fields conjecture implies the density of
hyperbolic dynamics in the space of all rational maps.
Proof. Let X = Ratd be the space of all rational maps of a fixed degree d > 1,
and let X qc be the open dense set of quasiconformally stable maps in this
b f )/ Mod(C,
b f ) parameterizes the
universal family. Let f ∈ X qc . Then Teich(C,
qc
b
component of X / Aut(C) containing f . Since the modular group is discrete
b acts with finite stabilizers, we have
and Aut(C)
b f ) = dim Ratd − dim Aut(C)
b = 2d − 2.
dim Teich(C,
Clearly f has no indifferent cycles, since by J-stability these would have to
persist on an open neighborhood of f in Ratd and then on all of Ratd . Therefore
f has no Siegel disks or parabolic basins. Similarly f has no periodic critical
points, and therefore no superattracting basins. By a Theorem of Mañé, f has
no Herman rings [Me]. Thus all stable regions are attracting basins. Finally f
is not covered by an integral torus endomorphism because such rational maps
form a proper subvariety of Ratd .
b f ) is given by nAC + nLF ,
By Theorem 5.41, the dimension of Teich(C,
the number of grand orbits of acyclic critical points in the Fatou set plus the
number of independent line fields on the Julia set. The no invariant line fields
conjecture then implies nLF = 0, so nAC = 2d − 2. Thus all critical points of f
lie in the Fatou set and converge to attracting periodic cycles, and therefore f
is hyperbolic.
By a similar argument one may establish:
Theorem 7.31 The no invariant line fields conjecture implies the density of
hyperbolic maps in the space of polynomials of any degree.
b f)
Remarks. If f is covered by an integral torus endomorphism, then Mod(C,
contains PSL2 (Z) with finite index (compare [Her]). It seems likely that the
modular group is finite for any other rational map whose Julia set is the sphere.
This finiteness would follow from the no invariant line fields conjecture as well,
b f ) = Aut(f ).
since then Mod(C,
7.9
Centers of hyperbolic components
A rational map f is critically finite if every critical point of f has a finite forward
orbit.
b be a component of the space of expandTheorem 7.32 Let U ⊂ Ratd / Aut(C)
ing rational maps of degree d. Suppose J(f ) is connected for f ∈ U . Then there
exists a unique critically finite map f0 ∈ U .
Compare [Mc1, §3].
144
8
Iteration on Teichmüller space
In this section we will develop Thurston’s topological characterization of critically finite rational maps. Of central interest is the construction of a rational
map with given combinatorics, via iteration on Teichmüller space. This iteration
is similar to, but simpler than, the iteration leading to a hyperbolic structure
on an atoroidal Haken 3-manifold.
8.1
Critically finite rational maps
A rational map f is critically finite if |P (f )| < ∞; that is, if every critical point
of f has a finite forward orbit.
Theorem 8.1 Let f be a critically finite rational map, and A its set of periodic
critical points. Then either
b − J(f ) is
• A 6= ∅, the Julia set J(f ) has measure zero, and every z ∈ C
attracted to A; or
b and the action of f on the sphere is ergodic.
• A = ∅, J(f ) = C
b by the classification of stable regions;
Proof. Assume A = ∅. Then J(f ) = C
for example, there is no Siegel disks or Herman rings U since we would have
∂U ⊂ P (f ), and this is impossible because P (f ) is finite.
Similarly, all periodic cycles of f are repelling (since an indifferent cycle in
J(f ) must be a limit point of P (f )). Thus under iteration, every critical point
of f lands on a repelling cycle. It follows that lim sup d(f n z, P (f )) > 0 for all z
outside the grand orbit of the critical points, a countable set. In particular, the
forward orbit of almost every z ∈ J(f ) is a definite distance from P (f ) infinitely
often; that is, lim sup d(f n (z), P (f )) > 0.
b be an f -invariant set of positive measure. Let z ∈ E be a
Now let E ⊂ C
point of Lebesgue density, outside the grand orbit of P (f ). Then k(f n )′ (z)k →
b − P (f ), so small balls about z can be blown up
∞ in the hyperbolic metric on C
to definite size in the hyperbolic metric. But f n (z) lands a definite distance from
P (f ) infinitely often, so these balls can also be blown up to definite spherical
size. Taking a limit, we conclude there exists a spherical ball B such that
b a.e., since f k (B) = C
b for some k.
m(B ∩ E) = m(B). But then E = C
The analysis of the case where A 6= ∅ is similar.
8.2
Rigidity of critically finite rational maps
The orbifold of a critically finite map. Let f : S 2 → S 2 be a critically
finite rational map. Let deg(f, p) denote the local degree of f at p ∈ S 2 .
For each p ∈ S 2 , let
N (p) = lcmf n (q)=p deg(f n , q).
145
(8.1)
Note that N (p) > 1 iff p ∈ P (f ). The orbifold of f , denote Of , has underlying
space S 2 and a singular point of order N (p) at each point in P (f ). If N (p) = ∞
then we introduce a puncture at p. The list of values of N (p) along P (f ) is the
signature of Of .
The Euler characteristic of the orbifold is given by
X
1
2
1−
χ(Of ) = χ(S ) −
.
N (p)
P (f )
It is easy to prove that χ(Of ) ≤ 0. We say Of is Euclidean if χ(Of ) = 0;
else Of is hyperbolic. For example, if |P (f )| > 4 then clearly f has a hyperbolic
orbifold.
The Euclidean orbifolds are easily classified; the possible signatures are:
(∞, ∞), (∞, 2, 2), (2, 2, 2, 2), (2, 4, 4), (3, 3, 3) and (2, 3, 6).
b gives Of the structure of a
The complex structure on the sphere S 2 ∼
= C
one-dimensional complex orbifold. Just as for Riemann surfaces, these orbifolds
can be uniformized; see [Mc4, Appendix A].
Theorem 8.2 (Uniformization) A complex orbifold O is covered by C if
χ(O) = 0, and by H if χ(O) < 0.
Corollary 8.3 Let f be a critically finite rational map; then kf ′ zk > 1 for all
z with f (z) ∈ Of .
Proof. The main case occurs when Of is hyperbolic, so we treat this case first.
Let π : H → Of be the universal covering map. Condition (8.1) guarantees that
for all q = f (p), we have
deg(f, p)N (p)|N (q).
Thus f −1 can be lifted to the local manifold coverings of Of at p and q: that
is, for uniformizing parameters z and w near p and q, we have
f (z N (p) ) = z N (p) deg(f,p) = wN (q)
and therefore
−1 (w) = wN (q)/(N (p) deg(f,p)) .
z = fg
−1 such
Because of this local lifting, on the universal cover we obtain a map fg
that the diagram
−1
fg
H ←−−−− H
πy
πy
f
b −−−
b
C
−→ C
−1 were an isometry, then f would be too, contradicting the
commutes. If fg
−1 contracts the
abundance of repelling cycles. Thus by the Schwarz lemma, fg
′
hyperbolic metric, and consequently kf k > 1.
146
In the Euclidean case one finds f : Of → Of is a covering map, and kf ′ k =
deg(f ) or deg(f )1/2 depending on whether or not Of is compact.
Examples.
1. The orbifold for f (z) = z n is Euclidean, with signature (∞, ∞).
2. The orbifold for f (z) = z 2 − 1 in hyperbolic with signature (∞, ∞, ∞).
3. The map f (z) = z 2 + i has a hyperbolic orbifold with signature (∞, 2, 2, 2)
(here P (f ) = {∞, i, −1 + i, −i}).
4. The Lattès example
f (z) =
z−i
z+i
2
has P (f ) = {0, ∞, −1, 1} with signature (2, 2, 2, 2) and is thus Euclidean.
Affine maps. The orbifold provides a clean way to isolate exceptional branched
covers related to toral endomorphisms. Suppose Of has signature (2, 2, 2, 2).
Then Of is canonically double-covered by a torus T , and f lifts to an endomorphism F : T → T . The action of F on H1 (T, Z) determines an element
A(f ) ∈ GL2 (Z)/{±1} with det(A(f )) = deg(f )2 , and F is isotopic to the affine
linear map
A(f ) : R2 /Z2 → R2 /Z2 .
If A(f ) = nI ∈ Z, we say f is an affine branched cover. Thus:
Theorem 8.4 A rational map is affine iff it is double-covered by an integral
torus endomorphism.
Here is another nice characterization.
Theorem 8.5 A rational map f is affine iff f ∗ φ = deg(f )φ for some nonzero
b − P (f )).
quadratic differential φ ∈ Q(C
Proof. If f is affine, say double-covered by F (z) = nz on C/Λ, then F ∗ (dz 2 ) =
b defines the require quadratic differn2 dz 2 and so the pushforward of dz 2 to C
ential φ.
b let N (z) be the number
For the converse, suppose f ∗ φ = deg(f )φ. For z ∈ C
of leaves of F (φ) through z. Then N (z) = 2 except at the finitely many zeros
and poles of φ. Since the foliation of φ is f -invariant we have
N (f (z)) deg(f, z) = N (z).
In particular, N (z) is does not decrease under backwards iteration.
Now φ(z) = 0 iff N (z) ≥ 3, and thus a zero at z implies a zero along the
full inverse orbit of z, which is impossible since φ has only finitely many zeros.
(If z is exceptional, then φ must have a zero of infinite order at z, which is also
147
impossible.) Therefore φ has no zeros, and thus φ(z) has exactly 4 poles. These
poles are located in P (f ).
Moreover every point in P (f ) must be a pole of φ. For if N (z) ≥ 2
and z ∈ P (f ), then f n (w) = z for some critical point w, and thus N (w) =
deg(f n , w)N (z) > 2, contrary to the fact that φ has no zeros.
It now straightforward to see that f : Of → Of is a covering map of orbifolds,
and thus f lifts to an endomorphism F of the characteristic torus covering
T → Of . Then F preserves the pullback of φ, so F is an integral endomorphism.
Theorem 8.6 (Rigidity of rational maps) Let f and g be topologically conjugate critically finite rational maps. Then either
• f and g are conformally conjugate; or
• f and g are double-covered by integral torus endomorphisms.
b →C
b be a
Proof. Let Q(f ) = f −1 (P (f )) and similarly for Q(g). Let φ : C
topological conjugacy from f to g; then φ sends P (f ) and Q(f ) to P (g) and
Q(g), since these sets are topologically defined. Thus we have a commutative
diagram
φ
b − Q(f ) −−−
b − Q(g)
C
−→ C
gy
fy
φ
b − P (f ) −−−
b − P (g)
C
−→ C
where the vertical maps f and g are covering maps between multiply-punctured
spheres.
Now tighten the lower arrow φ as much as possible relative to the post-critical
set. That is, deform φ to the Teichmüller mapping
b − P (f ) → C
b − P (g)
ψ0 : C
in the homotopy class of φ.
Lifting ψ0 to ψ1 , using the theory of covering spaces, we obtain the diagram
ψ1
b − Q(f ) −−−
b − Q(g)
C
−→ C
gy
fy
ψ0
b − P (f ) −−−
b − P (g).
C
−→ C
Since f and g are conformal maps, the dilatation satisfies K(ψ1 ) = K(ψ0 ). But
ψ0 and ψ1 are homotopic rel P (f ), since they are both homotopic to φ (and
Q(f ) ⊃ P (f )).
By uniqueness of the Teichmüller mapping, we have ψ0 = ψ1 . So we will
remove the subscript and simply denote the Teichmüller map by ψ.
148
If ψ is conformal, then it provides a conformal conjugacy between g and f ,
so we have proved rigidity.
Now suppose ψ is strictly quasiconformal, and let α be its associated quadratic
differential. Then f ∗ (α) = deg(f )α because f and ψ commute. More geometrically, the foliations of α are invariant under f , so f ∗ α = Rα for some R > 0,
and
Z
Z
∗
∗
|f α| = deg(f ) |α| = deg(f )kαk
kf αk =
b
C
b
C
determines R = deg(f ).
By Theorem 8.5, f is affine, so we are done.
Corollary 8.7 (The Monotonicity Conjecture) The topological entropy h(t)
of the real quadratic map ft (x) = tx(1 − x) is a monotone function, increasing
from 0 to log 2 as t increases from 0 to 4.
Here the entropy can be defined as
log (number of fixed-points of ftn )
·
n→∞
log n
h(ft ) = lim
The idea of the proof is that if monotonicity fails, then the same finite
kneading sequence must occur twice in the quadratic family. But this would
contradict the uniqueness of a rational map with a given combinatorial type
[MeSt, II.10].
8.3
Branched coverings
Let F : S 2 → S 2 be a smooth map of positive degree. We say F is a branched
cover if near any point p, we can find smooth charts φ, ψ sending p and F (p) to
0 ∈ C, preserving orientation, such that
φ ◦ F ◦ ψ −1 (z) = z d
for some d ≥ 1.
We wish to recognize rational maps among branched coverings of the sphere.
In the absence of dynamics, all branched coverings are representec by rational
maps.
Theorem 8.8 (Thom) Any branched covering F between a pair of spheres is
b →C
b and
equivalent to a rational map f . That is, there is a rational map f : C
homeomorphisms h0 , h1 such that the diagram
F
commutes.
S 2 −−−−→ S 2
h1 y
h0 y
f
b −−−
b
C
−→ C
149
Proof. Take the standard complex structure on S 2 , pull it back by f and apply
the uniformization theorem.
b in the usual way, let h1 = id and let h0
In more detail: identify S 2 with C
solve the Beltrami equation
(h0 )z
(h0 )z
=
Fz
Fz
= µ.
Note that kµk∞ < 1 because F is everywhere locally the composition of a
holomorphic map and a diffeomorphism. Since h0 and F have the same complex
dilatation, the mapping f making the diagram above commute is holomorphic.
For dynamical applications, we want to identify the spheres in the domain
and range of F so iteration makes sense. That is, we would want to have h0 = h1
so that F is conjugate to a rational map. Equivalently, we would want to find
a complex structure on S 2 that is preserved by F .
As one result in this direction we note:
Theorem 8.9 (Sullivan) A branched cover F is quasiconformally conjugate to
a rational map iff the iterates of F are uniformly quasiregular; that is, K(F n ) ≤
K0 < ∞.
Proof. If F = φ ◦ f ◦ φ−1 with f rational and φ quasiconformal, then F n =
φ ◦ f n ◦ φ−1 and thus K(F n ) ≤ K(φ)2 < ∞ for all n.
b let Hz = SL2 (Tz )/ SO2 (Tz ) denote the
For the converse, let for each z ∈ C
b For almost
hyperbolic plane of conformal structures on the tangent space Tz C.
every z, all forward and backward iterates of F are smooth at z, and thus all
tangent spaces along the grand orbit of z can be identified with Tz use DF n .
Use this identification to transport the standard conformal structure along the
grand orbit to a set of conformal structures Ez ⊂ Hz . (The set Ez can also be
though of as the set of all Beltrami coefficients at z that arise from forward and
backwards iterates of f .)
Since F n is uniformly quasiconformal, the set Ez is bounded. Let µz ∈ Hz be
the center of the smallest hyperbolic ball containing Ez . Then µz is preserved
by the dynamics, so it gives an F -invariant measurable complex structure at
bounded distance from the standard structure. Solving the Beltrami equation
φz /φz = µ, we obtain a rational map f by setting f = φ ◦ F ◦ φ−1 .
Remark. By the same method one can show a uniformly quasiconformal group
b is quasiconformally conjugate to a subgroup of PSL2 (C).
Γ acting on C
On the other hand, Freedman and Skora have constructed a uniformly quasiconformal group Γ ⊂ Diff(S 3 ) that is not even topologically conjugate to
a Möbius group [FS]. Their proof uses the fact that a finite link of circles
S
Ci ⊂ S 3 is unlinked iff every pair of circles is unlinked. For example, the
Borromean rings cannot be made out of round rings.
150
8.4
Combinatorial equivalence and Teichmüller space
Let f : S 2 → S 2 be a branched covering. Just as for a rational map, we say f is
critically finite if |P (f )| < ∞, in which case the orbifold Of with singularities
or punctures along P (f ) is defined. For a branched covering, Of is simply a
smooth orbifold — it has no complex structure.
Let f and g be critically finite branched covers of the sphere. We say f and
g are combinatorially equivalent if there are homeomorphisms φ0 , φ1 such that
φ1
(S 2 , P (f )) −−−−→ (S 2 , P (g))
gy
fy
φ0
(S 2 , P (f )) −−−−→ (S 2 , P (g))
commutes, and φ1 is isotopic to φ0 rel P (f ). This means there is a continuous
family of homeomorphisms
φt : (S 2 , P (f )) → (S 2 , P (g))
connecting φ0 and φ1 .
Roughly speaking, two branched coverings are combinatorial equivalent if
they are isotopic rel their postcritical sets.
If f and g are rational, we can pull φ0 taut (take its Teichmüller representative); then its lift is the taut representative of φ1 rel Q(f ), but generally it can
be relaxed by only pinning down its values on P (f ) ⊂ Q(f ). Thus the argument
proving the Rigidity Theorem 8.6 also shows:
Theorem 8.10 A critically finite branched covering of the sphere with hyperbolic orbifold is combinatorially equivalent to at most one rational map (up to
conformal conjugacy).
The goal of the remainder of this section is to answer the question:
Which branched coverings of the sphere are combinatorial rational
maps?
8.5
Iteration on Teichmüller space
We now show the classification of critically finite rational maps reduces to a
fixed-point problem on Teichmüller space.
Convention. For any finite set A ⊂ S 2 , we denote by Teich(S 2 , A) the Teichmüller space of the sphere with the points in A marked. This space is the
same as Teich(S 2 − N (A)), where N (A) is a regular neighborhood of A.
Since there is only one complex structure on S 2 , any point in Teich(S 2 , A)
b together with a marking homeomorphism
is represented by a finite set B ⊂ C
b B).
f : (S 2 , A) → (C,
151
b B) = Q(C−B),
b
The cotangent space is Q(C,
the space of meromorphic quadratic
b
differentials on C with at worst simple poles on B and holomorphic elsewhere.
Iteration. Now let F : S 2 → S 2 be a critically finite branched cover. Starting
b P0 ) ∈ Teich(S 2 , P (F )), and use the covering
with a complex structure (C,
F : (S 2 , Q(F )) → (S 2 , P (F )),
we can form a new Riemann surface
b P0 ) = (C,
b Q0 ) ∈ Teich(S 2 , Q(F ))
F ∗ (C,
by pulling back the complex structure on (S 2 , P (F )). The Riemann surface
b − Q0 is just the covering space of C
b − P0 dictated by F .
C
The inclusion
I : (S 2 , P (F )) → (S 2 , Q(F ))
permits us to mark a subset of Q0 by P (F ) and obtain a point
b Q0 ) = (C,
b P1 ) ∈ Teich(S 2 , P (F )).
I ∗ (C,
b − Q0 → C
b − P0 then prolongs to a rational map
The covering C
b P1 ) → (C,
b P0 ).
f0 : (C,
On the level of marked surfaces the composition I ∗ ◦ F ∗ gives a map
TF : Teich(S 2 , P (F )) → Teich(S 2 , P (F )).
b P0 ) = (C,
b P1 ) in Teich(S 2 , P (F )). Then after adjusting
Now suppose (C,
by a Möbius transformation we can assume P0 = P1 , and thus f0 is a rational
map with P (f0 ) = P0 . Moreover the marking of domain and range gives a
combinatorial equivalence of f0 to F . The converse is also easy to check, so we
have:
Theorem 8.11 F is combinatorially equivalent to a rational map iff TF has a
fixed-point on Teichmüller space.
In general, even if we do not start with a fixed-point, we obtain a sequence of
b Pi ) = T i (C,
b P0 ) and of rational maps fi such that f (Pi+1 ) ⊂
marked spheres (C,
F
Pi ; that is, we have the tower of maps:
fi
fi−1
f1
f0
b Pi+1 ) −−−−→ (C,
b Pi ) −−−−→ . . . −−−−→ (C,
b P1 ) −−−−→ (C,
b P0 ).
. . . (C,
b Pi ) converges in Teichmüller space, we will still obtain a fixed-point, and
If (C,
indeed the mappings fi will converge to the desired rational map f .
Theorem 8.12 (Contraction) Let F : S 2 → S 2 be a critically finite branched
covering. Then either
152
• Some iterate TFk contracts the Teichmüller metric; that is,
kDTFk k < 1
at each point of Teich(S 2 , P (F )); or
• OF has signature (2, 2, 2, 2), and TF is an isometry.
b P0 ) = (C,
b P1 ). Then we have a rational map
Proof. Suppose TF (C,
b P1 ) → (C,
b P0 )
f : (C,
b P0 )
in the combinatorial class of F . A tangent vector to Teich(S 2 , P (F )) at (C,
is specified by a Beltrami differential µ0 , and
DTF (µ0 ) = µ1 = f ∗ (µ0 ).
Of course kµ0 k∞ = kµ1 k∞ ; to compute kDTF k, we must use the fact that
the tangent space is a quotient of the space of Beltrami differentials. To do this,
we consider the coderivative on quadratic differentials,
which is given by
b − P1 ) → Q(C
b − P0 )
(DTF )∗ : Q(C
(DTF )∗ (φ1 ) = f∗ (φ1 ) = φ0 .
(Note that hφ1 , f ∗ µ0 i = hf∗ φ1 , µ0 i.) Under pushforward the total mass of the
area form |φ1 | cannot increase, but there may be a decrease due to cancellation
between corresponding sheets of f . Thus
k(DTF )∗ k ≤ 1.
b − P1 ) is finite
Now suppose kDTF k = 1. Then k(DTF )∗ k = 1. Since Q(C
b − P1 ) and
dimensional, its unit ball is compact, and thus there exist φ1 ∈ Q(C
b − P0 ) such that φ0 = f∗ (φ1 ) and kφ0 k = kφ1 k = 1. Because there
φ0 ∈ Q(C
is no cancellation in the pushforward, φ1 (z) must be a positive real multiple of
φ0 (w) whenever f (z) = w. In other words, their foliations agree under f .
Thus φ1 /f ∗ φ0 is a real-valued holomorphic function, hence a constant, and
therefore f ∗ (φ0 ) = deg(f )φ1 . There are only finitely many possibilities for the
poles of φ0 and φ1 as a subset of P (f ). Thus upon replacing Tf with a finite
iterate, we can assume the singularity structure (zeros and poles) of φ0 is the
same as the of φ1 . By the same method as that used in the proof of Theorem
8.5, we conclude that OF is the (2, 2, 2, 2)-orbifold.
Since F preserves a foliation, the matrix A(F ) ∈ End(Z2 ) giving the action
on the homology of the torus is hyperbolic; that is, it has real eigenvalues. It is
easy to see that TF acts on Teich(S 2 , P (F )) ∼
= H by the Möbius transformation
with matrix A(F ); in particular, TF is an isometry.
153
Remark. There are examples where TF is not contracting but an iterate
is. For example, suppose F is a mating of two strictly pre-periodic quadratic
polynomials. Then there is a set E ⊂ P (f )| with |E| = 4 such that F −1 (E) ⊂
P (f ) ∪ C(f ). Namely we can take E to consist of the critical values together
with the first periodic point in each of their forward orbits. A differential with
poles only at E has the property that its pullback has poles only on P (f ), and
then its pushforward is not contracted.
The map TF is never uniformly contracting.
8.6
Thurston’s algorithm for real quadratics
Before discussing the general case of TF , we mention its relation to a practical algorithm for constructing real quadratic polynomials with given kneading
sequences.
2
1
-2
-1
1
2
-1
-2
Figure 22. A critically finite quadratic polynomial of period 7.
Let f : R → R be a critically finite polynomial f (x) = x2 + c, c ∈ R. Then
P (f ) ⊂ R is a finite subset of the line. Furthermore we can write P (f ) =
{p1 , . . . , pn } such that pi = f i (0). In particular p1 = c. (For ease of notation,
we do not include ∞ in R, nor do we include ∞ in P (f ).)
Now
√
Q(f ) = f −1 (P (f )) = {± pi − p1 , i = 1, . . . , n} ⊂ R.
(8.2)
(Since every point in P (f ) has one real preimage, the other preimage is also
real.)
The combinatorial type or kneading sequence of f determines which points
in Q(f ) correspond to which points in P (f ). That is, if we write
Q(f ) = {q−n < q−n+1 < . . . < q−1 = 0 = q1 < q2 < . . . < qn },
then there is a unique index k(i) such that
pi = qk(i) , i = 1, . . . , n.
154
(8.3)
Figure 22 shows the example f (x) = x2 − 1.83232 . . . with |P (f )| = 7. In
this example k assumes the values h−7, 5, 2, −6, 3, −4, 1i on 1, 2, . . . , 7.
We also know P (f ) ⊂ J(f ) ⊂ [−2, 2]. Using just the kneading data k(i), we
can define a map
Tk : [−2, 2]n → [−2, 2]n
by sending a candidate (p1 , . . . , pn ) for P (f ) to a candidate Q(f ) by (8.2), then
re-indexing a subset by (8.3) to obtain
P (f ) ⊂ [−2, 2]. (The
√
√ a new candidate
new candidate lies in [−2, 2] since | pi − p1 | ≤ 4 = 2.)
If the kneading data k conforms to an actual quadratic polynomial f , then
Tk (P (f )) = P (f ) so Tk has a fixed-point. Conversely, if Tk fixes (p1 , . . . , pn ),
then f (x) = x2 + p1 has the kneading sequence k. By the rigidity theorem
proved before, we can conclude:
Theorem 8.13 The map Tk has at most one fixed-point (p1 , . . . , pn ) consisting
of n distinct points.
On the other hand, by Brouwer’s fixed-point theorem, Tk has at least one
fixed-point in [−2, 2]n . The only problem is that this fixed-point might involve
certain pi coalescing. Indeed, the point (0, . . . , 0) is always fixed by Tk .
Scaling. The iteration on [−2, 2]n is not quite the same as iteration on Teichmüller space, since the rescaling (pi ) 7→ √
(αpi ), α > 0, is trivial on Teich(S 2 , P (f )).
n
However if Tk (pi ) = pi , then Tk (αpi ) = ( αpi ); since α1/2 → 1, Tk contracts
the rescaling direction.
8.7
Annuli in Euclidean and hyperbolic geometry
In this section we summarize some results on annuli and geodesics to be used
below.
Lemma 8.14 If f : A → B is a degree d covering map between annuli, then
mod(A) = mod(B)/d.
Proof. Reduce to the case A = {1 < |z| < r}, B = {1 < |z| < s} and
f (z) = z d ; then r = s1/d .
Lemma 8.15 Let ⊔Ai ⊂ B be a collection of disjoint annuli Ai nested inside
in an annulus B (so π1 (Ai ) ∼
= π1 (B) ∀i). Then
X
mod(B) ≥
mod(Ai ).
Equality
S holds iff, in the extremal metric on B, each Ai is a right subcylinder
and Ai = B.
155
Proof. Let Γ be the set of arcs joining the ends of B. Let ρi be the extremal
metric
Pon Ai , making Ai into a right
P unit cylinder of height
Pmod(Ai ); and let
ρ=
ρi . Then areaρ (B) = 2π mod(Ai ), and ℓρ (γ) ≥
mod(Ai ) for any
arc γ ∈ Γ, so
X
mod(B) = 2πλ(Γ) ≥
mod(A).
For equality to hold, ρ must be the extremal metric on B, and thus the Ai must
form a partition of B into right subcylinders.
Lemma 8.16 Let γ ⊂ X be a closed geodesic on a hyperbolic Riemann surface,
and let Xγ → X be the cyclic covering space corresponding to hγi ⊂ π1 (X).
Then Xγ is an annulus with
mod(Xγ ) =
2π 2
·
ℓX (γ)
Proof. We have Xγ ∼
= H/hz 7→ eL zi where L = ℓX (γ). The invariant metric
|dz|/|z| makes Xγ into a right cylinder of height π and circumference L. Rescaling to obtain circumference 2π, the height becomes 2π 2 /L.
Corollary 8.17 For any closed curve γ on S, ℓγ (X) is a continuous function
on Teich(S). In fact
1
ℓX (γ) ≤ ℓY (γ) ≤ KℓX (γ)
K
if X and Y are related by a K-quasiconformal map.
Proof. A K-quasiconformal map between X and Y lifts to a map between
their covering annuli, so mod(Yγ )/ mod(Xγ ) ∈ [1/K, K].
Corollary 8.18 If γ ⊂ X is a simple geodesic, then
mod(A) ≤
2π 2
ℓX (γ)
for any annulus A ⊂ X embedded in the homotopy class of γ.
Proof. We can lift A to an annulus nested inside Xγ , so mod(A) ≤ mod(Xγ ).
156
Lemma 8.19 Let A ⊂ C be an annulus. Then if mod(A) is large enough,
there is a round annulus B = {z : a < |z − c| < c} nested in A such that
mod(A) = mod(B) + O(1).
Proof. Consider any univalent map
f : {z : R−1 < |z| < R} → C.
If R = ∞ then f (z) = az + b. By a normal families argument, once R is
large enough, f (S 1 ) is convex and nearly round. Thus for A ∼
= {z : S −1 <
2
|z| < S} with S ≫ R, the part of A corresponding to |z| ∈ [(R /S), (S/R2 )] is
bounded by nearly round curves, and hence A contains a round annulus B with
mod(B) ≥ mod(A) − 4 log R.
Corollary 8.20 Let ι : X ֒→ Y be an inclusion between hyperbolic Riemann
surfaces of genus zero, where X is n-times punctured sphere. Then any short
geodesic loop γ on Y satisfies
X
1
1
≤
+ O(1),
ℓY (γ)
ℓX (α)
ι(α)∼γ
where the sum is over all short geodesics α on X with ι(α) homotopic to γ. Here
short means of length less than ǫn > 0, and the constant in O(1) also depends
on n.
Proof. Up to isomorphism we can assume X and Y are complements of finite
sets E ⊃ F in C, and ι is the identity map. Then when ℓγ (Y ) is sufficiently
short, the loop γ is in the same homotopy class as a maximal round annulus
B ⊂Y =C−F
with
mod(B) = ℓY (γ)−1 + O(1) ≫ 1.
Now the circles through E ∩ B cut B into at most n concentric annuli
A1 , . . . , Am , each in the homotopy class of a geodesic αi on X = C − E. Then
mod(B) =
X
mod(Ai ) =
X
1
+ O(1).
ℓX (αi )
The geodesics which are not short contribute O(1) to the sum, so we have the
Corollary.
157
2
0
3
4
1
Figure 23. An impossible kneading sequence.
8.8
Invariant curve systems
We begin by detailing a potential obstruction to realizing a branched covering
F as a rational map.
Consider the combinatorial quadratic map f with |P (f )| = 4 depicted in
Figure 23. This kneading sequence cannot be realized by a quadratic polynomial.
For a proof, consider the annulus
b − P (f ).
A = (C − R) ∪ (p2 , p4 ) ∪ (p3 , p1 ) ⊂ C
It is not hard to see that A is the unique annulus of maximum modulus in
b − P (f ). (For a proof note that A lifts to an annulus
its homotopy class on C
bounded by geodesics on the flat torus branched over (p2 , p4 , p3 , p1 ).) On the
other hand, if f is a real quadratic then f −1 (A) = B ∪ B ′ will be a pair of
disjoint annuli, with mod(B) = mod(B ′ ) = mod(A) and with B and A in
b − P (f ). Clearly B 6= A and this contradicts
the same homotopy class on C
uniqueness of the annulus of maximum modulus.
The eigenvalue of a curve system. We now formulate a general obstruction.
A simple closed curve γ ⊂ S 2 − P (F ) is essential if it does not bound a disk,
and nonperipheral if it does not bound a punctured disk. Two simple curves are
parallel if they bound an annulus. A curve system Γ on S 2 −P (F ) is a nonempty
collection of disjoint simple closed curves γ on S 2 − P (F ), each essential and
nonperipheral and with no pair of curves parallel. By Euler characteristic considerations we have |Γ| ≤ |P (F )| − 3.
A curve system determines a transition matrix M (Γ) : RΓ → RΓ by
Mγδ =
X
α
1
deg(f : α → δ)
where the sum is taken over components α of f −1 (δ) which are isotopic to γ.
Let λ(Γ) ≥ 0 denote the spectral radius of M (Γ). By the Perron-Frobenius
theorem, λ(Γ) is an eigenvalue for M (Γ) with non-negative eigenvector.
158
b→C
b be a critically finite rational map. Then either:
Theorem 8.21 Let f : C
• f is affine, and λ(Γ) = 1 for any curve system; or
b − P (f ).
• f is not affine, and λ(Γ) < 1 for any curve system on C
Proof. Let hAγ i be any collection disjoint annuli in the homotopy classes
b − P (f ). Fixing γ ∈ Γ, consider the curves {α} ⊂
represented
by Γ on C
S
−1
f ( Γ) with α isotopic to γ. For each such α, with f (α) = δ ∈ Γ, there is a
corresponding annulus Bα ⊂ f −1 (Aδ ) with
mod(Bα ) =
mod(Aδ )
.
deg(f : α → δ)
These Bα are disjoint and nested, so we can form a single annulus A′γ ⊃
in the same homotopy class. Then
X
X
mod(A′γ ) ≥
mod(Bα ) =
Mγδ mod(Aδ ).
α
S
Bα
δ
Now suppose λ(Γ) > 1. Starting with any system of annuli A0 = hA0γ i, by
pulling back and regrouping as above we obtain systems Ai with the vector of
moduli satisfying
mod(Ai ) ≥ M (Γ)i mod(A0 ).
If λ(Γ) > 1 then this vector grows without bound, contrary to the fact that
mod(Aiγ ) is bounded above in terms of the hyperbolic length of γ.
Thus λ(Γ) ≤ 1 for any rational map f .
In case λ(Γ) = 1, there is a vector of moduli (mγ ) fixed by M (Γ). Using a
result of Strebel, one finds the extremal metrics for annuli of maximum moduli
proportional to (mγ ) piece together to give a metric |φ| from a holomorphic
quadratic differential [Str2]. Because of equality the pullback annuli must dissect
the extremal ones into right cylinders, we find f ∗ φ = deg(f )φ, and thus f is
affine.
So in fact λ(Γ) < 1 unless f is affine. For an affine map, |P (f )| = 4 and
thus Γ consists of a single curve γ. This curve has n pre-images, each mapping
by degree n, as can be seen by lifting γ to a geodesic on the torus double cover
b Thus M (Γ) = 1.
of C.
8.9
Characterization of rational maps
Lemma 8.22 The moduli space M0,n is an algebraic variety.
Proof. Let E ⊂PC be a set of n−1 distinct points. Normalizing by a translation
we can assume
E = 0. Then there is a unique monic polynomial
p(z) = z n−1 + a1 z n−3 + . . . + an−2
159
whose roots coincide with E. Conversely, if the discriminant D(p) 6= 0 then p
has n − 1 distinct roots. If we send E to λE, λ ∈ C∗ , then ai 7→ λi+1 ai . Modulo
this action, the coefficients of p determine a point [p] in a weighted projective
n−3
space P = Pw
. The discriminant vanishes on a subvariety D ⊂ P , and we see:
P −D
∼
=
∼
=
(n − 1-tuples E ⊂ C)/ Aut(C)
b with one distinguished point)/ Aut(C).
b
(n-tuples F ⊂ C
By forgetting which point is distinguished, we obtain an n-to-1 covering map
P − D → M0,n , and thus the moduli space of n-tuples of distinct points on the
sphere is an algebraic variety (indeed an affine variety).
Remark. In fact Mg,n is a quasiprojective variety for every (g, n). It is
generally not affine.
Lemma 8.23 The graph of TF covers an algebraic subvariety
R ⊂ M0,n × M0,n ,
n = |P (F )|. The variety R is the graph of a correspondence, and |R(X)| is
finite for every X ∈ M0,n . In fact
nd
|R(X)| ≤
(d!)n−1 ,
n
where d = deg(F ).
Proof. We regard points X ∈ M0,n as Riemann surfaces of genus 0 with
n points removed. Let Vd ⊂ M0,n consists of those pairs (X0 , X1 ) such that
X1 contains an embedded degree d (connected) covering of X0 . By general
principles, Vd is an algebraic subvariety, and clearly the graph of TF covers
a component R of Vd . Thus R itself is a subvariety, in fact an irreducible
component of Vd .
To bound R(X0 ), note first that a covering space Y → X0 of degree d
is specified by a map π1 (X0 ) → Sd . Since π1 (X0 ) is a free group on n − 1
generators, there are (d!)n−1 such
maps. Each Y has at most nd punctures, so
Y is contained in at most nd
surfaces
X0 with n punctures.
n
Lemma 8.24 We have kDTF (X)k < C([X]) < 1 where C([X]) is a continuous
function depending only on the location [X] of X in the moduli space M0,n ,
n = |P (F )|.
b P0 ) representing a point in M0,n ,
Proof. As in the preceding lemma, given (C,
there are only finitely maps
b P1 ) → (C,
b P0 )
f0 : (C,
that arise from TF . Since kDTF k = kf∗ k < 1 for each of these maps, we obtain
b P0 ) in M0,n .
a bound depending only on the location of (C,
160
Remark. Alternatively, let R0 ⊂ R denote the component of R covered by
the graph of TF . Then at any point ([X], [Y ]) ∈ R0 , the derivative DR0 of
the local correspondence in the Teichmüller metric on M0,n is well-defined, and
agrees with the derivative of TF over this pair. Thus kDTF (Xi )k → 1 implies
([Xi ], [TF (Xi )]) → ∞ in R0 , which implies Xi → ∞ in M0,n .
Theorem 8.25 (Thurston) Let F : S 2 → S 2 be a critically finite branched
covering. Then F is combinatorially equivalent to a rational map f if and only
if:
(Torus case) OF has signature (2, 2, 2, 2) and TF : H → H is an elliptic
Möbius transformation; or
(General case) OF does not have signature (2, 2, 2, 2) and
λ(Γ) < 1
for every F -invariant curve system Γ on S 2 − P (F ).
In the second case f is unique up to conformal conjugacy.
Proof. If OF has signature (2, 2, 2, 2), then TF is an isometry of Teich(S 2 , P (F )) ∼
=
H, and F is rational ⇐⇒ TF has a fixed-point ⇐⇒ TF is elliptic (or the
identity). So we may suppose OF does not have signature (2, 2, 2, 2).
If F is equivalent to a rational map f , then λ(Γ) < 1 for every invariant
curve system, by Theorem 8.21. Uniqueness of f follows from contraction of
TF .
For the converse, assume F is not equivalent to any rational map. Then F
has no fixed point on Teichmüller space. To complete the proof, we will show
λ(Γ) ≥ 1
for some curve system Γ on S 2 − P (F )
To construct Γ, pick any X0 ∈ Teich(S 2 , P (F )), and set
Xi = TFi (X0 ).
Then kDTF (Xi )| < C(Xi ) < 1 where C(Xi ) depends only on the location of
[Xi ] in moduli space M0,n . Let
p0 ⊂ Teich(S 2 , P (F ))
i
be the geodesic segment joining X0 to X1 , and let
S pi = TF (p0 ). If [Xi ] is
contained in a compact
subset of M0,n , then so is [ pi ]; then TF is uniformly
S
contracting on pi , so Xi converges to a fixed-point, contrary to assumption.
Therefore [Xi ] eventually leaves any compact subset of M0,n (although it
may return). By Mumford’s Theorem 4.18, this means for any ǫ > 0 there is an
i such that
L(Xi ) = (length of the shortest geodesic on Xi ) < ǫ.
161
We will now show that for suitable ǫ > 0, the short curves Γ on Xi satisfy
[ℓγ (Xi+1 )−1 ] ≈ M (Γ)[ℓγ (Xi )−1 ],
and thus M (Γ) gives a linear approximation to the action of TF . If λ(Γ) < 1,
then M (Γ) is contracting and the short geodesics are forced to become long
again. Since lim inf L(Xi ) = 0, we will eventually find a Γ with λ(Γ) ≥ 1 and
this will complete the proof.
To choose ǫ, first pick an ǫ0 > 0 such that ǫ0 -short curves on any X ∈
Teich(S 2 , P (F )) are disjoint simple geodesics, and such that Corollary 8.20
holds for ǫ0 -short curves on an nd-times punctured sphere. Next let K be
the dilatation of the extremal quasiconformal map from X0 to X1 . Finally pick
M ≫ max(K 2 , n) whose exact size will be fixed later, and set
ǫ = ǫ0 /M n .
Now consider any Xi with L(Xi ) < ǫ. Since Xi has at most (n − 3) geodesics
of length less than ǫ0 , there must be a δ ∈ [ǫ, ǫ0 ] so the length spectrum of Xi
avoids the interval [δ, M δ]. Let Γ denote the nonempty set of geodesic loops on
Xi of length less than δ. Then we have
ℓγ (Xi ) <
ℓδ (Xi )
≪ ℓδ (Xi )
M
for any geodesic δ 6∈ Γ.
√
We will now refer to geodesics of length less than M δ as short. Since
d(Xi , Xi+1 ) ≤ d(X1 , X0 ), there is a K-quasiconformal map from Xi to Xi+1 ,
and hence
√ the lengths of geodesics on Xi and Xi+1 agree to within a factor of K.
Since M ≥ K, the length spectrum of Xi avoids [δ, K 2 δ], so Γ also represents
the set of all short geodesics on Xi+1 .
On the other hand, we have a diagram
ι
Yi −−−−→ Xi+1
fy
Xi
where f is a degree d = deg(F ) rational map and ι is an inclusion of genus zero
Riemann surfaces. By Corollary 8.20, for each γ ∈ Γ we have
X
1
1
≤
+ O(1),
ℓγ (Xi+1 )
ℓα (Yi )
ι(α)∼γ
where the sum includes only curves α with ℓYi (α) ≤ ǫnd (a constant depending
only on the number of punctures of Yi ). The loops α which cover loops Γ on Xi
contribute most to the sum, since any other loop is at least M/d times longer,
and there are less than n other loops. Thus only a small error is committed if
162
we leave out these other loops, and retain α only if it covers some δ ∈ Γ. More
precisely we have:
X
1
1
nd2
1
≤ 1+
·
+ O(1).
ℓγ (Xi+1 )
M
deg(f : α → δ) ℓα (Xi )
ι(α)∼γ,f (α)=δ∈Γ
The vector of inverse lengths
vi = [ℓγ (Xi )−1 ]
therefore satisfies
vi+1 ≤ (1 + η)M (Γ)vi + O(1)
(8.4)
where η → 0 as M → ∞.
Although Γ ranges among the countably many different collections of curve
systems on S 2 − P (F ), since n = |P (F )| and d = deg(F ) are fixed, there are
only a finite number of possibilities for the matrix M (Γ). Thus there is a λ0
such that λ(Γ) ≥ 1 or λ(Γ) < λ0 < 1. Since
λ(Γ) = lim kM (Γ)p k1/p ,
we can choose p such that kM (Γ)p k < 1/2 whenever λ(Γ) < 1.
Now if kvi k is large enough, we have L(Xi ) ≤ ǫ/K p and thus L(Xj ) ≤ ǫ for
j = i, i + 1, . . . , i + p. For M ≥ K 2p , the short geodesics Γ on Xi agree with the
short geodesics on Xj for i ≤ j ≤ i + p. Finally if λ(Γ) < 1 then by (8.4) we
find
2
(1 + η)p
kvi k + O(1) ≤ kvi k
kvi+p k ≤
2
3
once M is large enough that η is negligible.
In other words, if kvi k gets large then it is forced to get small again within
p iterates. Noting that kvi+1 k ≤ Kkvi k, we conclude that supi kvi k < ∞. But
kvi k ≥ 1/L(Xi ), so we have contradicted the fact that lim inf L(Xi ) = 0.
Thus to have kvi k → ∞, we must at some point obtain a curve system Γ
with
λ(Γ) ≥ 1.
This Γ is the desired topological obstruction to realizing F as a rational map.
8.10
Notes
Thom’s result is in [Thom]; Douady and Hubbard present Thurston’s characterization of combinatorially rational branched covers in [DH]. For more on the
orbifold approach to critically finite rational maps, see [Mc4, Appendix A and
B].
163
{ 2,0,4,3,1}
{ 2,0,3,4,1}
{ 2,3,0,5,4,1}
{ 2,3,0,4,5,1}
{ 2,3,4,0,6,5,1}
{ 2,3,4,0,5,6,1}
{ 2,5,3,0,6,4,1}
{ 2,3,5,0,4,6,1}
{ 2,3,4,5,0,7,6,1}
{ 2,3,4,5,0,6,7,1}
{ 2,3,6,4,0,7,5,1}
{ 2,3,4,6,0,5,7,1}
{ 2,5,3,0,7,6,4,1}
{ 2,5,3,0,6,7,4,1}
{ 2,5,7,0,3,6,4,1}
{ 2,5,0,3,7,6,4,1}
{ 2,5,0,3,6,7,4,1}
{ 2,7,5,0,3,4,6,1}
3
3
4
4
5
5
3
3
6
6
4
4
6
6
4
6
6
4
Table 24. Impossible kneading sequences.
164
8.11
Appendix: Kneading sequences for real quadratics
Notation. The post-critical set is labeled with the integers 0 = critical point,
n = f n (critical point). To describe a real unimodal critically finite map, we list
the postcritical set in the order it appears on the real line, and give a single digit
indicating the image of the point with the highest label. For example, 2, 0, 1 2
indicates that 2, the image of the critical value, is a fixed point.
The following kneading sequences cannot be realized by quadratic polynomials. In each case there is a finite collection of disjoint intervals Ik , with endpoints
in the post-critical set, permuted homeomorphically by the mapping.
The remaining kneading sequences can be realized as quadratic polynomials.
This table gives the kneading sequence and the value of t such that f (x) =
tx(1 − x) has the same kneading behavior.
{ 0}
0
2.
{ 2,3,4,5,6,7,0,1}
0
3.99985
{ 0,1}
{ 2,0,1}
{ 2,0,1}
{ 2,3,0,1}
0
2
0
0
3.23607
4.
3.83187
3.96027
{
{
{
{
2,3,4,5,6,0,7,1}
2,3,4,5,6,0,7,1}
2,3,4,5,6,0,7,1}
2,3,4,5,6,0,7,1}
3
4
5
6
3.99771
3.99785
3.99809
3.99845
{ 2,0,3,1}
{ 2,0,3,1}
{ 2,3,4,0,1}
0
3
0
3.49856
3.67857
3.99027
{ 2,3,4,5,6,0,7,1}
{ 2,3,4,5,6,0,7,1}
{ 2,3,4,7,5,0,6,1}
0
7
0
3.99864
3.99893
3.99252
{
{
{
{
2,3,0,4,1}
2,3,0,4,1}
2,3,0,4,1}
2,0,3,4,1}
3
0
4
0
3.89087
3.90571
3.92774
3.73891
{
{
{
{
2,3,4,5,0,6,7,1}
2,3,4,5,0,6,7,1}
2,3,4,5,0,6,7,1}
2,3,4,5,0,6,7,1}
3
4
5
0
3.99745
3.99726
3.99685
3.99622
{
{
{
{
2,3,4,5,0,1}
2,3,4,0,5,1}
2,3,4,0,5,1}
2,3,4,0,5,1}
0
3
4
0
3.99758
3.96792
3.97459
3.97777
{
{
{
{
2,6,3,7,4,0,5,1}
2,3,6,4,0,7,5,1}
2,3,6,4,0,7,5,1}
2,3,6,4,0,7,5,1}
0
0
7
5
3.96094
3.97372
3.97221
3.97032
{
{
{
{
2,3,4,0,5,1}
2,5,3,0,4,1}
2,3,0,4,5,1}
2,3,0,4,5,1}
5
0
3
0
3.98257
3.84457
3.94935
3.93754
{
{
{
{
2,3,4,6,0,5,7,1}
2,3,4,0,6,5,7,1}
2,3,4,0,6,5,7,1}
2,3,4,0,6,5,7,1}
3
3
4
0
3.97643
3.97898
3.98034
3.98141
{ 2,0,4,3,5,1}
{ 2,5,0,3,4,1}
{ 2,3,4,5,6,0,1}
0
4
0
3.62756
3.76495
3.9994
{ 2,3,7,4,0,5,6,1}
{ 2,3,4,7,0,5,6,1}
{ 2,5,3,0,7,6,4,1}
0
6
4
3.98775
3.98597
3.88184
{
{
{
{
2,3,4,5,0,6,1}
2,3,4,5,0,6,1}
2,3,4,5,0,6,1}
2,3,4,5,0,6,1}
3
4
5
0
3.99125
3.99228
3.99378
3.99454
{
{
{
{
2,5,3,0,6,7,4,1}
2,5,3,0,6,7,4,1}
2,7,3,5,0,4,6,1}
2,7,3,5,0,4,6,1}
3
0
5
0
3.86828
3.87054
3.9006
3.89947
{
{
{
{
2,3,4,5,0,6,1}
2,3,6,4,0,5,1}
2,3,4,0,5,6,1}
2,3,4,0,5,6,1}
6
0
3
4
3.99569
3.96898
3.9891
3.98734
{
{
{
{
2,7,3,0,5,4,6,1}
2,7,3,0,5,4,6,1}
2,3,7,0,5,4,6,1}
2,6,3,7,0,4,5,1}
0
5
6
5
3.91205
3.91346
3.91879
3.9523
{
{
{
{
2,3,4,0,5,6,1}
2,5,3,0,6,4,1}
2,5,3,0,6,4,1}
2,5,3,0,6,4,1}
0
0
6
4
3.98475
3.88605
3.87654
3.8568
{
{
{
{
2,3,6,0,4,7,5,1}
2,3,6,0,4,7,5,1}
2,3,6,0,4,7,5,1}
2,3,6,0,4,5,7,1}
0
4
7
3
3.94421
3.94539
3.94655
3.94126
{ 2,3,0,5,4,6,1}
{ 2,3,0,5,4,6,1}
{ 2,6,3,0,4,5,1}
3
0
0
3.91694
3.92219
3.95103
{ 2,3,0,6,4,5,7,1}
{ 2,3,0,6,4,5,7,1}
{ 2,6,0,4,3,7,5,1}
3
0
0
3.93342
3.93047
3.55465
{
{
{
{
2,3,6,0,4,5,1}
2,6,0,4,3,5,1}
2,5,0,3,6,4,1}
2,5,0,3,6,4,1}
5
5
0
3
3.94282
3.59257
3.77421
3.78088
{
{
{
{
2,0,6,4,3,5,7,1}
2,5,0,3,6,7,4,1}
2,5,0,3,6,7,4,1}
2,7,0,5,3,4,6,1}
0
0
3
4
3.66219
3.80077
3.79812
3.72029
{ 2,5,0,3,6,4,1}
{ 2,0,5,3,4,6,1}
6
0
3.7911
3.70177
{ 2,7,0,5,3,4,6,1}
6
3.71255
Table 25. Quadratic kneading sequences.
165
9
Hausdorff dimension of Julia sets
In this section we discuss the thermodynamic formalism, and use it (following
Ruelle) to compute the Hausdorff dimension of J(z 2 + c) as a function of c.
9.1
Quadratic polynomials
We begin with a self-contained discussion of the polynomials we will consider.
Theorem 9.1 Let f (z) = λ(z) + z 2 with |λ| < 1, and let Ω(0) be the immediate
basin of z = 0. Then J(f ) = ∂Ω(0).
Proof. Let U denote the component of K(f ) containing z = 0. Then f : U → U
is a proper holomorphic map on a disk. Since 0 is attracting, deg(f |U ) = 2.
Thus by the Schwarz lemma, U = Ω(0), and U is totally invariant. If we were
to change coordinates so that z = ∞, then hf n i would be uniformly bounded
outside of U . Thus J(f ) ⊂ ∂U . But ∂U ⊂ ∂K by definition, so J(f ) = ∂Ω(0).
The lakes of Wada. Can we deduce that
C = Ω(0) ∪ Ω(∞)?
Not quite! We do find that Ω(0) and Ω(∞) have the same boundary, but in
principle their closures need not fill the sphere. The lakes of Wada are three
open regions on the sphere, nonempty, which all have the same boundary.
Expansion and local connectivity.
Let f (z) = z d + a1 z −1 + · · · + ad be a polynomial of degree d with K(f )
connected. Let
b − K(f ))
b − ∆) → (C
Φ : (C
be the Riemann mapping, normalized so that Φ′ (∞) = 1.
Theorem 9.2 If f (z) is expanding, then Φ extends to a Hölder continuous map
S 1 → J(f ) giving a semiconjugacy between z 7→ z d and z 7→ f (z). In particular,
J(f ) is locally connected.
Proof. Let p(z) = z d . Choose M > 1 and consider the rectangle R0 obtained
by cutting open the annulus M < |z| < M d along the positive real axis. Then
for α = 1/dn+1 , the region M α < |z| < M dα is neatly tiled by the dn preimages
of R0 under pn (z). Each tile has diameter comparable to 1/dn .
The map Φ sends this tiling for z d to a similar tiling for f (z). Each of the
image titles is a preimage of Φ(R0 ) under a suitable iterate of f n .
Suppose f is expanding a factor of at least Λ > 1 in a suitable metric near
J(f ). Then the titles at level n have size bounded by O(Λ−n ). In other words,
Φ sends the titles of size s = d−n to tiles of size O(sα ), where dα = Λ.
166
Each radial edge of a tite for z d at level n can be extended to a line segment L
that terminates on S 1 . By summing the geometric series, we find diam Φ(L) =
O(Λ−n ). It follows that Φ has a well-defined radial limit at every point x ∈
S 1 = R/Z of the form x = m/dn . Moreover, if x = m/dn and y = (m + 1)/dn ,
then d(Φ(x), Φ(y)) = O(Λ−n ) = O(|x − y|α ). It follows easily that Φ has an
α-Hölder continuous extension to the unit circle.
9.2
Hausdorff dimension
We remark that if X is a compact metric space and X carries a probability
measure such that µ(B(x, r)) ≍ rδ for all 0 < r < 1, then 0 < µδ (X) < ∞.
Indeed, for any covering Bi = B(xi , ri ) of X we have
X
X
riδ ≍
µ(Bi ) ≥ 1,
so µδ (X) > 0.
For the converse, choose a maximal set (x1 , . . . , xn ) such that d(xi , xj ) ≥ r
for i 6= j. (Such a set is finite by compactness.) Then Bi = B(xi , r) forms a
cover of X, else we could add another point to this set. On the other hand, the
balls Bi′ = B(xi , r/2) are disjoint, because their centers are at least distance r
apart. Thus
X
X
µ(Bi′ ) < 1,
riδ ≍
and hence µδ (X) < ∞.
Computation of Hausdorff dimension. The simplest case is an interval
I =S[0, 1] ⊂ R that contains disjoint subintervals I1 , . . . , In . We define a map
f : Ii → I which is linear and surjective on each subinterval. Its filled Julia
set K(f ) then has dimension δ, where
X
|Ii |δ = 1.
To see this, use the fact that the measure in dimension δ satisfies
X
X
m(K) =
m(Ki ) =
m(K)|Ii |δ
because |f ′ | = 1/|Ii | on Ki = K(f ) ∩ Ii . So long as 0 < m(K) < ∞ we can
cancel to obtain the result above.
Hausdorff dimension and eigenfunctions of the Laplacian. We now turn
to a more interesting, nonlinear case.
Laplacian. The usual Laplacian in the plane is given by
∆f =
d2 f
d2 f
d2 f
+
=
4
·
dx2
dy 2
dz dz
167
The geometric Laplacian, for a conformal metric ρ = ρ(z)|dz|, is the negative
of this function and takes into account the metric:
∆ρ f = 4
∂∂f
·
ρ(z)2 dz dz
For example, on the upper half plane with f (y) = y s and ρ(z) = |dz|/y, we have
dy/dz = i/2 and ∂∂y = 0, so
∂∂y s = ∂(sy s−1 ∂y) = s(s − 1)y s−2 (∂y)(∂y) = s(s − 1)y s−2 /4,
so geometrically y s is an eigenfunction:
∆ρ y s = s(1 − s)y s .
The visual metric. Next, we observe that the Im(1/z) = y/|z|2 is also harmonic, as is the function y/|z − x|2 for any fixed x ∈ R.
Now consider the visual metric ρp (x)|dx| induced on the real line from any
point p ∈ H. This metric is given by:
ρp =
Im p |dx|
|p − x|2
up to scale. (The formula can be checked by using the map x = tan(θ/2) to
relate the circle and the real axis.) For example, we have
ρi =
|dx|
,
1 + x2
with total integral π. (One can normalize so the integral is 2π, or 1, if desired).
Key point: if we fix a vector v at a point x ∈ R, then the visual length of
this vector is a harmonic function of x.
For any measurable set E ⊂ R, we can define a function fE (p) on H by
taking the the visual measure of E as seen from p. The result is thus a harmonic
function:
Z
Im z |dx|
fE (z) =
·
2
E |z − x|
If E is invariant under a group Γ ⊂ SL2 (R), then so is fE . (Conversely, any
bounded harmonic function on H comes from the visual average of an L1 function on H.)
9.3
Eigenfunctions and Hausdorff measures
Now suppose E ⊂ R is a set of Hausdorff dimension s > 0, with finite, positive
measure in its dimension. Recall that the Hausdorff measure on E depends on
a choice of metric. For the metric |dx|, let us denote this measure by µ. Then
for another metric ρ(x)|dx|, we have
µρ = ρ(x)s µ.
168
Thus the measure of E in the visual metric from p ∈ H is given by
Z Z
Z
(Im p)s dµ
ρp (x)s dµ(x) =
fE (p) =
·
2s
E E |p − x|
E
But ρp (x)s is an eigenfunction of the hyperbolic Laplacian with eigenvalue s(1 −
s). Thus ∆fE = s(1 − s)fE . So if E is Γ-invariant, it determines a positive
eigenfunction of the Laplacian on X = H/Γ.
Example: Schottky groups. (See [Mc6].) Let Γθ be the Fuchsian group
generated by reflections in three disjoint symmetric circles, each orthogonal to
S 1 and meeting S 1 in an arc of length 0 < θ ≤ 2π/3. Since the limit set of this
group is contained in S 1 , we have 0 < H. dim(Λ(Γθ )) ≤ 1.
Theorem 9.3 As θ → 0 we have
H. dim(Λθ ) ∼
log 2
1
≍
,
12 − 2 log θ
| log θ|
while for θ → 2π/3 we have
1 − H. dim(Λθ ) ∼ λ0 (Xθ ) ≍
p
2π/3 − θ.
(9.1)
(9.2)
Proof. Let P = h(Pi , ρi )i with Pi = D(Ci ), i = 1, 2, 3. Then ρ1 (P1 ) ⊃ P2 ⊔ P3 ,
and similarly for the other blocks of P.
For θ small the reflections ρi are nearly linear on Pi ∩ ρi (Pj ), i 6= j, so
α(P) already provides a good approximation to δ. To compute α(P),
√ note the
distance d between the centers of any pair of circles Ci and Cj is 3, and the
radius of each circle is approximately r = θ/2. Therefore
|ρ′i | ∼
r2
θ2
=
2
d
12
inside Pj , i 6= j, and the transition matrix satisfies
0
tα
tα
0
tα
Tijα = tα
tα
tα
0
with t ∼ θ2 /12. The heighest eigenvalue of T α is simply 2tα ; solving for λ(T α ) =
1, we obtain (9.1).
To estimate Dθ = H. dim Λθ when the circles are almost tangent, we first
note that Dθ → 1 as θ → 2π/3, by the continuity of Dθ and the fact that
the limit set is S 1 when the circles touch. For Dθ > 1/2 we have the relation
λ0 (Xθ ) = Dθ (1 − Dθ ), where λ0 (Xθ ) is the least eigenvalue of the L2 -Laplacian
on the hyperbolic surface Xθ [Sul6], [Mc7, Thm. 2.1], which shows
1 − Dθ ∼ λ0 (Xθ )
169
as θ → 2π/3.
Now for θ near 2π/3, the convex core of Xθ is bounded by three short simple
geodesics of equal length Lθ . These short geodesics control the least eigenvalue
of the Laplacian; more precisely,
R
|∇f |2
λ0 (Xθ ) = inf RXθ
≍ Lθ ,
|f |2
Xθ
because the quotient above is approximately minimized by a function with f = 1
in the convex core of Xθ , f = 0 in the infinite volume ends, and ∇f supported
in standard collar neighborhoods of the short geodesics [DPRS, Thm 1.1′ ]. A
calculation with cross-ratios shows, for C1 , C2 ∈ Cθ ,
p
Lθ = 2dH2 (C1 , C2 ) ≍ 2π/3 − θ,
and we obtain (9.2).
9.4
Thermodynamics
A useful reference for this section is [PP].
Let X be a compact metric space, and let C(X) denote the space of continuous, real-valued functions on X.
Fix a modulus of continuity, an increasing continuous function m(r) on [0, ∞)
such m(0) = 0. We define the variation of a function, relative to m(r), to be
the smallest constant V (f ) such that
|f (x) − f (y)| ≤ V (f )m(r)
whenever d(x, y) = r. The space C(X, m) of functions with modulus of continuity m(r) is a Banach space relative to the norm
kf k = kf k∞ + V (f ).
In fact, it is a Banach algebra. A sharper version of this is the statement
V (f g) ≤ kf k∞ V (g) + kgk∞ V (f ).
We also have the useful pointwise estimate, for r = |x − y|,
|f (x)g(x) − f (y)g(y)| ≤ |f (x)|V (g)m(r) + |g(y)|V (f )m(r).
Examples. If m(r) = r then we obtain the Lipschitz functions. If m(r) = rα ,
0 < α < 1, we obtain the Hölder continuous functions of exponent α. The latter
occurs frequently and will be denoted by C α (X), and its variation by Vα (f ).
Exponentiation and tropicalization. It is a beautiful fact that if
eh = ef + eg ,
170
then V (h) ≤ max(V (f ), V (g)). A more familiar fact is that this statement holds
when h = max(f, g), which is the limiting case coming from tropicalization
(when f + g 7→ max(f, g) and f g 7→ f + g). An example of the fact above is
that |h′ | ≤ max(|f ′ |, |g ′ |) when all three exist and are continuous. To see this,
note that
Af ′ (x) + Bg ′ (x)
h′ (x) =
,
A+B
where (A, B) = (ef (x) , eg(x) ). Since A, B > 0, the expression above gives h′ (x)
as a convex combination of f ′ (x) and g ′ (x).
The general statement regarding V (h) is proved similarly. If x changes by r
then f (x) increases by at most m(r), and similarly for g. Thus
eh ≤ m(r)(ef + eg ),
and hence h increases by at most m(r). The same idea gives a lower bound on
the variaton. It implies:
Theorem 9.4 Let F ⊂ C(X) be the space of continuous functions with modulus
of continuity m(r). Then exp F ⊂ C(X) is a convex cone over a compact base.
The compact base condition means that any sequence in exp F can be
rescaled to yield a convergent subsequence with a nonzero limit. Alternatively,
if we look at the subset of exp F where f (p) = 1 for some fixed p, this is a
convex compact subset of C(X).
Fixed-points. The following general fixed-point theorem is useful for proving
the Perron-Frobenius theorem in infinite dimensions. (It is however somewhat
non-constructive, since it relies on the Brouwer fixed-point theorem; another
approach to Perron-Frobenius is to use contraction in the Hilbert metric.)
Theorem 9.5 (Schauder–Tychonoff ) Let f : K → K be a continuous map
of a compact convex subset of a Banach space into itself. Then K has a fixed
point.
Proof. The key point is to show there exists a sequence of continuous map
gn : K → Ln ⊂ K such that d(x, gn (x)) < 1/n and Ln is a finite-dimensional
convex set. Then gn ◦ f has a fixed-point xn ∈ Ln by Brouwer’s theorem, and
any accumulation point x ∈ K is then fixed by f .
To construct gn , choose a finite set (x1 , . . . , xN ) which comes within distance
1/(10n) of every point in K. Let αi : K → [0, 1] be a continuous function that
is 1 at xi , positive on B(xi , 1/(5n)) and 0 outside B(xi , 1/(2n)). Let LN be the
convex hull
P of the points (x1 , . . . , xN ) and let gn (x) be the barycenter of the
measure
αi (x)δxi . Then gn : K → Ln has the required properties.
171
The Ruelle operator. Now let σ : X → X be an expanding map on a
compact metric space. In fact we will focus on just two examples: σ is the shift
on (Z/d)N , and σ(x) = dx on S 1 = R/Z. In both cases the metric can be chosen
so σ locally expands distances by a factor of d.
Let φ ∈ C α (X) be a Hölder continuous function. The Ruelle operator is
defined on C(X) by
X
exp(−φ(y))f (y) = σ∗ (e−φ f ).
Lφ (f )(x) =
σ(y)=x
So L0 (f ) is just the pushforward of f under σ.
The conjugacy class of Lφ only depends on the cohomology class of φ. To
see this, observe that
σ∗ (σ ∗ gf ) = gσ∗ (f ).
Thus
Lφ+∂ψ (f ) = σ∗ (e−φ−ψ+ψ◦σ f ) = eψ Lφ (e−ψ f ),
which is just the conjugate of Lφ by the multiplication operator f 7→ eψ f .
Theorem 9.6 The Ruelle operator on C(X) has a unique positive eigenvalue
λ > 0. This eigenvalue is simple, and the corresponding eigenvector f ∈ C(X)
is strictly positive and lies in C α (X).
Proof. The proof is based on a simple but critical estimate that will be useful
later. Consider the case where σ(x) = 2x on X = S 1 . Assume φ ∈ C α (S 1 ).
The key point is that
Vα (f (x/2)) = 2−α Vα (f ).
Thus if Vα (f ) ≤ M , then
Vα (φ(x/2)f (x/2)) ≤ Vα (φ) + 2−α M < M
once M is large enough. It follows that if we set
F = {f : Vα (f ) ≤ M },
then exp F maps into itself under Lφ .
Moreover exp F ⊂ C α (X) is a convex cone with a compact base, as a subset
of C(X).
Using the Schauder-Tychonoff theorem, we deduce that the Ruelle operator
has an invariant ray in exp F , and hence R has a positive eigenvector f ∈ C α (X).
More precisely, pick a point p ∈ X and let Kp = {h ∈ exp F : h(p) = 1}. This is
a compact, convex set. Let ρ(h) = h/h(p). Then h 7→ ρ(Lφ )(h)) is a continuous
map of Kp to itself, and its fixed point gives the desired eigenvector.
Now suppose we have two continuous positive eigenvectors, Rfi = λi fi .
Then after rescaling, we can assume f1 < f2 . It follows that Rn (f1 ) = λn1 f1 <
Rn (f2 ) = λn2 f2 for all n, and hence λ1 ≤ λ2 . By symmetry, λ1 = λ2 . Now
suppose f1 6= f2 . Then we can form an eigenfunction g ≥ 0, a linear combination
172
of f1 and f2 , such that g(x) = 0 at some point. But it is easy to see that if
R(h) = g vanishes at x, then h vanishes at σ −1 (x). It follows that the zero
set of g is closed under inverse iteration of σ, so it forms a dense subset of X.
Therefore g = 0, and consequently the positive eigenfuction is unique.
Pressure. The pressure of φ is defined by
P (φ) = log ρ(Lφ ).
A basic property is that P (φ+c) = P (φ)+c. In addition, P (δφ) is a continuous,
monotone increasing function of δ. Thus we can find δ such that P (δφ) = 0.
Comparison
to the matrix discussion. Suppose we have a natural partition
S
K = Ki with an expanding map f : K → K, such that f (Ki ) is a finite union
of Kj ’s. Let Kij = Ki ∩ f −1 (Kj ), and assume f |Kij is constant. Define
Aij = |f ′ |Kij |−1
or 0 if f (Ki ) does not meet Kj . Finally set φ = − log |f ′ |. Then a function f on
K which is constant on each Ki is given simply by a vector f , and the Ruelle
operator satisfies
X
Aδij fj .
Lδφ (f )i =
j
Thus the matrix approach to dimension is a special case of the thermodynamic
formalism, and the unique δ such that ρ(Aδ ) = 1 is the same as the unique δ
such that P (δφ) = 0.
Normalized φ. Now suppose P (φ) = 0. In this case have a unique positive
function ef such that
Lφ (ef ) = ef .
We can now modify φ by f − f ◦ σ to pass to the setting where Lφ (1) = 1. In
this case we say φ is normalized.
Note that when φ is normalized, the values of e−φ over the preimage of a
given point sum to one:
X
e−φ(x) .
1=
f (x)=y
This implies that:
kLφ (f )k∞ ≤ kf k∞
for all f ∈ C(X).
Convergence. Once φ is normalized we have:
Theorem 9.7 For any f ∈ C(X), the functions Lnφ (f ) converge uniformly to
R
the constant function with value f dm.
173
Proof. First suppose f ∈ C α (X), and let fn = Lnφ (f ). These functions are
uniformly bounded by kf k∞ as we have just noted. Moreover, the same type of
reasoning we used in the construction of an eigenvector shows kfn kα is bounded.
Thus we can pass to a subsequence such that fn → g uniformly. Since kfn k∞
converges, we have kLnφ (g)|∞ = kgk∞ . But the Ruelle operator simply takes
the weighted averages of the values of g. Thus if Lnφ (g) achieves its maximum
at x, then g must achieve its maximum at all the points in σ −n (x). Hence g is
in fact constant. This shows fn only accumulates on constants, and it is easy
to see the constant is unique.
To treat f ∈ C(X), just use the fact that C α (X) is dense in C(X) Lφ is a
weak contraction on C(X).
The invariant measure. We can now define a positive linear function on
C(X) by
m(f ) = lim Lnφ (f ).
This functional can be interpreted as integration against a probability measure
on X, since m(1) = 1. It clearly satisfies
m(Lφ (f )) = m(f ).
Now recall Lφ (gf ◦ σ) = f Lφ (g). Setting g = 1 and applying the equation
above, we find
m(f ◦ σ) = m(f ).
In other words, m is an invariant measure for σ.
Now suppose σ|E is 1-1. Then
φ
φ
m(σ(E)) = m(σ∗ (χE )) = m(Lφ (e χE )) = m(e χE ) =
Z
eφ dm.
E
In other words, m transforms by eφ under σ.
Rest of the spectrum. We can now show:
Theorem 9.8 The rest of the spectrum of Lφ |C α (X) lies strictly inside the
unit disk.
Sketch of the proof. It suffices to prove ρ(Lφ ) < 1 when restricted to the
space C0α (X) of functions with with m(f ) = 0. Let B be the unit ball in C0α (X).
Then B is compact in C(X). Thus given ǫ > 0 we can find an N such that
kLnφ (f )k∞ < ǫ for all f ∈ B. We also know, following the argument used in the
proof of the existence of an eigenvector in C α (X), that V0 = supn kLnφ kα < ∞.
Combining these remarks, one can in fact show that kLnφ k < 1/2 for n large
enough. Then ρ(Lφ ) < (1/2)1/n .
174
The meaning of the Ruelle operator. We can now explain the meaning
of the Ruelle operator. Once P (φ) = 0, there is a natural measure m on X
that transforms by eφ under σ. However this measure is usually not invariant.
Indeed,
σ∗ (f m) = Lφ (f )m.
Thus the invariant measure is f m, where f is the eigenfunction. This measure
does not transform by eφ but by φ + ∂ log f .
Spectrum and mixing.
Corollary 9.9 The measure m is unique.
By similar reasoning we show:
Theorem 9.10 The spectralR radius of Lφ restricted to the subspace C0α (X),
consisting of functions with f dm = 0, is strictly less than one.
Proof. Let B be the unit ball in C0α (X). Then B is compact in C0 (X). By the
preceding result, kLnφ (f )k∞ → 0 uniformly on B. From this it follows easily that,
in fact, kLnφ (f )kC α → 0 uniformly on B. Thus lim sup kLnφ k1/n = ρ(Lφ ) < 1.
Correlations, adjoints and inner products. Let hf, gi =
then have
hLφ (f ), gi = hf, g ◦ σi.
R
X
f g dm. We
Indeed,
σ∗ (f m) = Lφ (f )m,
and so
Z
Lφ (f )g dm = hg, σ∗ (f m)i = hg ◦ σ, f mi = hσ ∗ (g), f i.
Corollary 9.11 (Rapid decay of correlations) If f, g ∈ C α (X) and
0, then hf, g ◦ σ n i → 0.
R
f dm =
Proof. Use the fact that hf, g ◦ σ n i = hLnφ (f ), gi.
Corollary 9.12 (Mixing) For any f, g ∈ L2 (m), we have
hf ◦ σ n , gi → hf, 1ihg, 1i
as n → ∞.
Corollary 9.13 The map σ is ergodic with respect to the measure m.
Proof. It suffices to show that there is no σ-invariant function in L20 (X). But
any function in this space satisfies hf, f ◦ σ n i → 0.
175
Note. The spectral radius of Lφ is not zero on C0 (X). It increases to one as
α → 0.
The arguments above can be applied to prove mixing of the geodesic flow
on a surface of negative curvature, by using a Markov section to reduce to the
case of symbolic dynamics. Remarkably, this approach makes no reference to
the horocycle flow.
Gibbs measures. Let E = [x1 , . . . , xN ] be a cylinder set. Then σ N (E) = X
and hence
Z
N
eS φ dm.
1=
E
Because of Hölder continuity and expansion of σ, the integrand varies by at
most a bounded factor over E, and hence we have
m(E) ≍ exp(φ(x) + φ(σ(x)) + · · · φ(σ N −1 (x)))
for any x ∈ E, with uniform bounds. A shift invariant probability measure with
this property is called a Gibbs measure. This property is a hidden form of the
distortion lemma used frequently in expanding dynamics.
Note that m is also a Gibbs measure for any function cohomologous to φ.
Thus we have shown:
Theorem 9.14 For any φ ∈ C α (X), there exists a β > 0 such that βφ admits
a unique Gibbs measure.
The constant β is determined by the condition that P (βφ) = 0. As we will
see below, the β plays the role of inverse temperature. It isP
adjusted so that if
we sum over a covering by cylinder sets at level N , we get
m(E) ≍ 1, using
the Gibbs property to express the measure in terms of φ.
Uniqueness comes from the fact that any two Gibbs measures are mutually
absolutely continuous and the fact that σ is ergodic on (X, m) which we have
shown.
Physical thermodynamics. Suppose we have a huge number of particles
N , and we allocate them to n different states, Q
with Ni in state i. Then the
total number of possible configurations is S =
Ni !. If particles are free to
move around between states, they will also most likely
P be found in the configuration that maximizes S. If we set pi = Ni /N , so
pi = 1, then to a good
approximation we have
X
S = C(N )
pi | log pi |.
Of course this function is maximized when all pi are equal.
In information theory, when you are told a sample lies in a set E, the amount
of information you gain is I(E) = | log P (E)|. This is the only reasonable
definition that satisfies I(EF ) = I(E) + I(F ) when E and F are independent
events. Then S is the expected amount of information you obtain upon making
a measurement that determines which of the n states a given particle occupies.
Nature arranges the particles so you obtain as much information as possible.
176
P
Now suppose state i requires energy ui and the total energy U = Ni ui is
fixed. Then nature will still maximizes S, but now subject to the constraint
X
pi ui = U/N.
By Lagrange multipliers, we find a solution is given by pi proportional to
exp(−βui ). Here β = 1/T is the inverse temperature of the system. The
partition function is defined by
X
Z=
exp(−βui ),
and then pi = exp(−βui )/Z.
Now let us return to the Ruelle operator. It is used to study thermodynamic
equilibrium for a system on the 1-dimensional lattice Z. We take X = σn or
more generally a subshift of finite type, 2-sided. This means each site in Z has
a finite number of possible states.
The function φ(x) = φ(. . . , x−1 , x0 , x1 , . . .) gives the energy of this configuration at the site x0 . That is, it expresses the energy due both to the state x0
and to its interactions with neighboring states. Hölder continuity means distant
sites have an exponentially small effect on the energy at site 0.
The inverse temperature β then solves P (−βφ) = 0. Incorporating this
temperature into the function φ, we find that the shift-invariant equilibrium
measure satisfies
m[x0 , . . . , xn ] ≈ exp(φ(x) + φ(σx) + · · · φ(σ n−1 x)),
where the left-hand side denotes a cylinder set. It is thus reasonable to say that
the distribution m describes the equilibrium distribution of states for particles
on a lattices with the given interactions.
9.5
Dimension of Julia sets
The main goal of this section is to prove:
Theorem 9.15 (Ruelle) For c near zero we have
H. dim J(z 2 + c) = 1 +
|c|2
+ O(|c|3 ).
4 log 2
Applications of the Ruelle operator. Let fλ (z) = λz + z 2 with |λ| < 1. As
a typical application of the Ruelle operator, we will show:
Theorem 9.16 There exists a conformal metric ρ(z)|dz| on J(fλ ) such that
the Hausdorff measure for this metric is fλ -invariant, and transforms by |fλ′ |δ .
To see this, let us identify (S 1 , σ) with the Julia set J(fλ ). Set φ(x) =
log |f ′ (x)|, using this identification. Since topological conjugacies between expanding dynamical systems are Hölder continuous, we have φ ∈ C α (S 1 ) for
some α.
177
Applying the general theorem, we can pick a δ > 0 such that P (δφ) = 0.
Then the resulting equilibrium measure transforms by |f ′ (x)|δ . In other words,
the thermodynamic formalism naturally constructs conformal density on the
Julia set. The eigenfunction gives a change of metric that makes this density
invariant.
Vector field on S 1 . Now let fc (z) = z 2 +c. Let Φc : C−∆ → C−K(fc ) be the
Riemann mapping to the outside of the filled Julia set, defined for c ∈ M . The
Julia set moves by a holomorphic motion over the main cardioid. The direction
of motion can be computed explicitly by differentiating Φc . At c = 0 we find
that the motion of the Julia set is given by a vector field V = dΦc /dc|c=0 . Since
Φc (z 2 ) = Φc (z)2 + c,
by differentiating both sides with respect to c we obtain
V (z 2 ) = 2zV (z) + 1.
The vector field V is holomorphic on the outside of the disk, so it is given by
a Laurent series in 1/z. In fact there is a unique solution to this functional
equation:
V (z) = −z
= −z
∞
X
n
2−n z −2
n=1
1
1
1
+ 4 + 8 + ···
2
2z
4z
8z
.
To see this, it is somewhat easier to deal with W (z) = −V (z)/z. This function
on the outside of the disk satisfies
W (z 2 ) = −V (z 2 )/z 2 = −2V (z)/z − 1/z 2 = 2W (z) − 1/z 2 .
P∞
From this we find W (z) = 2 ai /z i with 2a2 = 1, hence a2 = 1/2. We also see
the higher order terms involve only even powers of z, and satisfy a2n = an /2.
Thus a2k+1 = 1/2k , and the other terms are zero.
Higher order terms. It will be useful later to know that
Z
log |Φc (z)| dm = 0
S1
for all c near 0. This is equivalent to the statement that the Lyapunov exponent of the maximal measure mc = (Φc )∗ (m0 ) is log 2, and that the Hausdorff
dimension of mc is one. To see the vanishing above, note that
log |Φc (z)| = Re log Φc (z)/z = Re log(1 + O(1/z)) = Re hc (z),
R
where hc (z) is a function involving only negative powers of z. Clearly hc (z) =
0, so the same is true for log |Φc (z)|.
178
Change in expansion factor. We now set φc (z) = log |fc′ (Φc (z))| = log 2 +
log |Φc (z)|. Then φ0 (z) = log 2, and we wish to compute ψ = dφc /dc, say along
the real axis. Thinking of c as very small and real, we have
log |Φc (z)| = log |z+cV (z)| = log |1+cV (z)/z| = Re log(1+cV (z)/z) = c Re(V (z)/z).
Thus
ψ = Re(V (z)/z) = − Re
n
n
∞
X
n+1
z2
/2n ,
1
using the fact that Re 1/z = Re z on the circle. Clearly
R
S1
ψ dm = 0.
Variance. We now turn to the variance, a quadratic form defined by
∞
Var(f ) = lim
X
kSn (f )k22
f ◦ σ i i.
= hf, f i + 2hf,
n
1
The associated bilinear form is
Var(f, g) = hf, f i +
∞
X
1
hf, g ◦ σ i i +
∞
X
1
hf ◦ σ i , gi.
A remarkable fact is that Var(f ) = 0 for f of mean zero in C α (X) iff f is
cohomologous to zero [PP, Prop. 4.12]. Note that if f = √
g − g ◦ σ, then
n become norSn (f ) is bounded for all n. Otherwise,
the
values
of
|S
(f
)|/
n
R
p
mally
distributed.
In
the
first
case,
|S
(f
)|
=
O(1)
and
in
the
second case
n
R
|Sn (f )|p ∼ Cnp/2 , where C > 0 only depends on Var(f ). So in all cases we
have good estimates on the Lp behavior of Sn (f ).
Using the expressions above, we find for σ(z) = z 2 we have Var(z a ) = 1 in
agreement with the usual inner product on L2 (S 1 ) (normalized to have length
one), and V (z a , z b ) = 0 except that
Var(z a , z b ) = 1 if a = 2n b for some n ∈ Z.
Put differently, we must take into account the fact that z a is cohomologous to
n
z 2 a . This means every power of z has a unique representative in its cohomology
P
n
class of the form z a with a odd. To compute the variance of f = ∞
0 an z ,
we just need to collect terms so we obtain a sum only over odd exponents of z.
(Note that a0 = 0 since we are assuming the mean of f is zero; otherwise the
variance is not defined.)
It is now immediate that
!
∞
X
n+1
Var
z 2 /2n = Var(z) = 1.
1
R
R
R
For a holomorphic function f , we have | Re f |2 = | Im f |2 = (1/2) |f |2 , and
similarly Var(Re f ) = (1/2) Var(f ). Thus Var(ψ) = 1/2.
179
Variance and pressure. Consider a smooth family of functions φ = φt (x) ∈
C α (X), all with P (φt ) = 0. Let Lt = Lφt . We assume that L0 (1) = 1, and
let m denote the corresponding invariant probability measure on X. Since the
eigenvalue 1 is isolated, we have a smoothly varying eigenfunction satisfying
f0 = 1 and
Lt (ft ) = ft .
Recall that Lφ (f ) = σ∗ (e−φ f ). Differentiating with respect to t, and evaluating
at t = 0, we find
L0 (−φ̇) + L0 (f˙) = f˙.
Integrating with respect to m, this implies
Z
φ̇ = 0.
We can get a further relation by differentiating a second time, to get
L0 (−φ̈) + L0 (φ̇2 ) + L0 (−φ̇f˙) + L0 (f¨) = f¨.
Integrating this time gives
Z
φ̇2 −
Z
φ̇f˙ =
Z
φ̈.
Replacing σ with σ n , dividing by n and taking the limit, we obtain
Z
Var(φ̇) = φ̈,
using the fact that (Sn φ̇)/n → 0 in L1 (X, m).
Calculation of dimension. We are now in a position to calculate δc =
H. dim(fc ) to second order in c, near c = 0. We will find:
H. dim J(fc ) = 1 +
|c|2
·
4 log 2
To do this we use the fact that fc′ (z) = 2z, and set
φc (z) = δc log |fc′ (Φc (z))| = δc (log 2 + log |Φc (z)|) = δc (log 2 + ψc ).
R
We have ψc = 0 for all c, and hence ψ̇ and ψ̈ also integrate to zero.
Since P (φc ) = 0, and δ0 = 1, the function
φ̇ = δ̇ log 2 + ψ̇
integrates to zero, and hence δ̇ = 0. This implies
Z
φ̈ = δ̈ log 2 = Var(ψ̇) = 1/2,
and hence δ̈ = 1/(2 log 2) as claimed.
Isospectral maps on the circle. In this section we will show:
180
Theorem 9.17 Two marked expanding C 1+α maps on the circle, with the same
degree d, are C 1+α conjugate iff LC (f1 ) = LC (f2 ) for all periodic cycles; that
is, iff they have the same multiplier at corresponding periodic points.
α
1
Proof. The
P key point is to prove that a function g ∈ C (S ) is cohomologous
to zero iff x∈C g(x) = 0 for all periodic cycles C.
To see this, choose y with a dense P
forward orbit, and define a function f
n−1
along this forward orbit by f (σ n y) = 0 g(y). This would recover f if we
had g(x) = f (σx) − f (x) and f (y) = 0.
To complete the proof, we need only show that f is C α along the forward
orbit of y. Suppose z0 , . . . , zk are consecutive points in the forward orbit of y,
and |z0 − zk | < ǫ. Then
k−1
X
|f (zk ) − f (z0 )| = g(zi ) .
0
Now by taking the preimage of ball of radius 2ǫ about zk , we can easily find a
periodic cycle (p0 , . . . , pk−1 , pk = p0 ) with
X
X
|pi − zi | = O(ǫ) and
|pi − zi |α = O(ǫα ).
Then
k−1
k−1
X
X
X
g(zi ) − g(pi ) ≤ O
g(zi ) = |zi − pi |) = O(ǫα ,
0
0
completing the proof.
Now let φi (x) = log |fi′ (x)|. By assumption, φ1 − φ2 sums to zero over every
periodic cycle, so these two functions are cohomologous. Thus they determine
the same invariant measure on S 1 . The density of this measure is a C α function.
By integrating this measure, we obtain a C 1+α conjugacy from each fi to the
same canonical, measure–preserving model F . In particular f1 and f2 are C 1+α
conjugate to each other.
10
Teichmüller theory and the Shafarevich conjecture
In this section, following [IS] and [Mc8], we give a proof of the Shafarevich
conjecture based on Teichmüller theory.
Theorem 10.1 Let Z be a hyperbolic Riemann surface of finite volume, and
fix a genus g ≥ 2. Then there are only finitely many nonconstant holomorphic
maps f : Z → Mg .
The proof involves three facts:
181
1. The map f is rigid: it is uniquely determined by its homotopy class.
2. The map f is distance-decreasing.
3. Given p ∈ X, there is a compact set K ⊂ Mg that contains f (p) for all f .
Combining these facts, we see the family of all such mappings f is compact and
discrete, hence finite.
We will freely use Teichmüller’s theorem on extremal quasiconformal maps,
which provides an extension of any real geodesic to an isometric immersion of
H into Tg .
10.1
Holomorphic maps contract
Let us begin with the distance-decreasing property. For this purpose we recall
that the Gauss curvature of a conformal metric ρ = ρ(z) |dz| is given by
K(ρ) = −
∆ log ρ
·
ρ2
For example, when ρ = |dz|/y, we get K(ρ) = −1.
Clearly if you shrink the hyperbolic metric by a constant factor then it
becomes even more negatively curved. Here is a converse:
Theorem 10.2 Let δ be a metric on H such that K(δ) ≤ −1 everywhere. Then
δ ≤ ρ.
Thus the identity map from (H, ρ) to (H, δ) is a contraction.
Proof. By a standard trick we can assume δ is smooth on ∂H, and then
ρ/δ → ∞ on ∂H. Thus ρ/δ assumes its minimum at a point p ∈ H. At this
point we have
0 ≤ ∆ log(ρ/δ) = −K(ρ)ρ2 + K(δ)δ 2 ≤ ρ2 − δ 2 ,
and the result follows.
Theorem 10.3 Any holomorphic map f : H → Tg is distance–decreasing.
(From the hyperbolic metric of curvature −4 to the Teichmüller metric.)
Idea of the proof. By Teichmüller’s theorem, every vector in Tg is tangent to
an isometrically embedded hyperbolic plane. Since the graph of a holomorphic
function is a minimal surface, the pullback of the Teichmüller metric to H satisfies K(δ) ≤ −1 and hence we have contraction. (This idea can be made precise
using Lelong’s theorem, which controls the volume growth of a holomorphic
disk.)
182
10.2
The theme of short geodesics.
We can now begin the third point in the proof. We will show:
Theorem 10.4 There is a compact set K = K(Z, p) such that
f (p) ∈ K ⊂ Mg
provided the monodromy of f is irreducible (it preserves no simple closed curve).
For this we need the following facts:
1. The set of Riemann surfaces Y ∈ Mg with the length of the shortest
geodesic ≥ r > 0 is compact.
2. For any Y1 , Y2 ∈ Tg and closed curve C, we have
1
LC (Y1 )
≤
≤ K,
K
LC (Y2 )
where K is the minimal dilatation of a quasiconformal map from Y to Z.
(Note that H/z 7→ λz is a cylinder of height L = log λ and circumference
π.)
3. Short geodesics are simple and hence there are at most 3g − 3 such curves
on a surface Y ∈ Mg .
Proof of Theorem 10.4. If Y = f (p) has too many short curves these must
be permuted by generators of the monodromy and hence globally invariant.
Two closely related facts are the following (see [ES], [Kra] and [Bers2]):
Proposition 10.5 Let f : ∆∗ → Mg be a holomorphic map. Then the monodromy of f is virtually a product of Dehn twists.
Proposition 10.6 Let f : Tg → Tg be an element of the mapping class group.
Then f is either finite order or reducible.
10.3
Review of Kleinian groups
b
A Kleinian group is a discrete subgroup Γ ⊂ Aut(C).
Discrete means that
3
3
M = H /Γ is a hyperbolic orbifold.
The limit set of Γ is defined by
b
Λ=Γ·p∩C
b where Γ is not
for any p ∈ H3 . It can also be defined as the set of points z ∈ C
a normal family, or the closure of the fixed-points of elements of Γ of infinite
order.
We will assume Γ is nonelementary — any abelian subgroup has infinite
index. This is equivalent to saying Λ consists of 3 or more points, which in turn
implies Λ is an uncountable, perfect set.
183
Theorem 10.7 If Γ is nonelementary, then Λ is the smallest nonempty, closed,
Γ-invariant subset of the sphere.
Corollary 10.8 The limit set coincides with the closure of the hyperbolic fixed
points of elements of Γ, and Λ is the set of accumulation points of Γ · z for any
b
z ∈ C.
b − Λ.
The quotient Riemann surface The domain of discontinuity is Ω = C
Since are assuming Γ is nonelementary, Ω is hyperbolic and Γ acts isometrically
and (by discreteness) properly discontinuously in this metric.
The quotient X = Ω/Γ is a complex orbifold.
Theorem 10.9 (Ahlfors–Bers) If Γ is finitely generated, then Ω/Γ is a hyperbolic surface of finite area.
Rigidity. The next result of Sullivan is based on quasiconformal deformations.
We restate it using holomorphic motions.
Theorem 10.10 Let Γt be a holomorphic family of finitely–generated Kleinian
groups parameterized by t ∈ ∆. Suppose the Riemann surface Xt = Ωt /Γt is
constant. Then Γt is Möbius conjugate to Γ0 for all t.
Expanding groups and quotient 3-manifolds. The Kleinian manifold is
defined by
N 3 = (H3 ∪ Ω)/Γ.
The Kleinian group is expanding if N 3 is compact. This is equivalent to the
condition that for all z ∈ Λ there is a g ∈ Γ such that kg ′ zk > 1 in the spherical
metric.
10.4
Quasifuchsian groups
A geometric construction of Teichmüller space as a complex manifold can be
based on:
Theorem 10.11 Given any X, Y ∈ Tg , there exists a natural Kleinian group
Γ(X, Y ) obtained by mating the corresponding Fuchsian groups.
To be more correct we should take X marked by S and Y marked by S so
there is a natural orientation–reversing map between X and Y .
The key to the proof is to show the boundary correpondence φXY : S 1 →
1
S is quasisymmetric. This can be proved using (i) expanding dynamics, (ii)
quasi-isometries on H and stability of geodesics, or (iii) boundary properties of
quasiconformal maps.
Projective structures. Now fix X ∈ Tg and consider any q ∈ Q(X), or
equivalent a Γ-invariant q ∈ Q(H) where X = H/Γ. Then we can solve Sf = q
to get a conformal immersion
b
f : H → C,
184
as well as a representation
ρ : Γ → Γ′ ⊂ PSL2 (C)
such that
f (g · z) = ρ(g) · f (z)
for all g ∈ Γ. With respect to the metric
kqk∞ = sup |q|/ρ2 ,
it is known that
kqk∞ ≤ 1/2 =⇒ f is 1-1 =⇒ kqk∞ ≤ 3/2.
Let S(X) ⊂ Q(X) be the set of q such that f is 1 − 1, and let U (X) be
the component of the interior of S(X) containg q = 0. Then f (S 1 ) moves
by a holomorphic motion over U (X), and hence f (S 1 ) is a quasicircle, which
implies Γ′ is quasifuchsian. Conversely, if Y ∈ Tg , we may use simultaneous
uniformization to get a point q ∈ U (X). Summing up, we have an ismorphism
Tg ∼
= U (X)
for each X ∈ Tg . Now it is easy to see that we get a holomorphic universal curve
over U (X). Thus the map above is holomorphic, using e.g. H 1 (Y, Θ) to define
the complex structure on Tg . Altogether we have shown:
Theorem 10.12 Teichmüller space is natural isomorphic to a bounded domain
U (X) in Q(X), for each X ∈ Tg .
Remark: The Weil–Petersson metric. Since Q(X) is naturally isomorphic
to H 1 (X, Θ)∗ , it can be identified with the cotangent space T∗X Tg . On the other
hand, the derivative of the Bers embedding at X provides a linear isomorphism
TX Tg → Q(X). Putting these together we get a bilinear form on the tangent
space. In fact the target is not quite Q(X) but Q(X); taking this into account,
we obtain a Hermitian metric on Teichmüller space. Up to a constant factor, it
coincides with the Weil–Petersson metric
Z
ρ−2 |φ|2
kφk2 =
X
on Q(X).
This symmetry of the form persists to general pairs of Riemann surfaces and
gives rise to quasifuchsian reciprocity [Mc9].
10.5
Classification of surface groups
To proceed we must have some information about the groups that arise on ∂Tg
under the Bers’ embedding above.
185
Lemma 10.13 If Ω/Γ has a cusp, then Γ has a parabolic element.
Proof. The cusp must currespond to a nontrivial cyclic subgroup hgi in Γ,
else Λ would have an isolated point. Then ∆∗ ∼
= Ω/hgi embeds essentially in
b
T = (C − F )/hgi, where F is the set of fixed points of g. If g were hyperbolic
this would give an essential embedding of ∆∗ into a torus, which is impossible.
Theorem 10.14 Let Γ be a Kleinian group isomorphic to the fundamental
group of a closed surface of genus g ≥ 2. Suppose Γ has no parabolics. Then
either:
1. Γ is quasifuchsian,
2. Ω is connected, or
b
3. Λ = C.
Proof. If the limit set is disconnected then Γ decomposes as a free product,
which is impossible. So Λ is connected and hence every component Ω′ of Ω is a
topological disk.
Let Γ′ be the stabilizer of Ω′ . By the Ahlfors finiteness theorem, X ′ = Ω′ /Γ′
is a Riemann surface of finite topological type. If Γ′ has infinite index in Γ, then
it must be a free group, so X ′ has a punctures, which implies Γ′ has a parabolic
element, contrary to assumption.
Thus Γ′ has finite index in Γ, and therefore the orbit of Ω′ consists of finitely
many components. Again by the Ahlfors finiteness theorem, this implies Ω has
finitely many components. Passing to a subgroup of finite index, we can assume
each is fixed. Then N 3 has finitely many boundary components, each of which
is a closed surface including into N 3 surjectively on π1 .
If ∂N has at least 2 such components, by considering the homotopy between them we conclude that N 3 has exactly 2 boundary components, and is
expanding, hence quasifuchsian. Otherwise ∂N has 1 or 0 components. These
conclusions are unaffected by a finite extension back to the original surface
group.
Totally degenerate groups. We say a point ρ : π1 (X) → Γ in ∂Tg is totally
degenerate if Λ(Γ) is connected and Γ has no parabolics.
Theorem 10.15 Every group in ∂ Tg is either totally degenerate or has parabolics.
Corollary 10.16 A dense Gδ in ∂Tg consists of totally degenerate groups.
In particular, such groups exist!
186
Theorem 10.17 Suppose Xn ∈ Tg converges to a totally degenerate group Γ.
Then LC (Xn ) → ∞ for every closed curve C.
Proof. By assumption, C corresponds to a hyperbolic element g ∈ Γ, say with
b and g(z) = λz, |λ| > 1. Since Λ is connected and fixed
fixed points 0, ∞ ∈ C
points are dense in Λ, the other component Ωn of the domain of discontinuity
for Γ(X, Xn ) is very thin when n is large. Thus any path from z to λn z in Ωn
has large hyperbolic length, and thus LC (Xn ) → ∞.
Theorem 10.18 Given gn ∈ Modg , suppose gn · Y converges to a totally degenerate group Γ for some Y ∈ Tg . Then gn · Y → Γ for all Y ∈ Tg .
Proof. Any limit of the maps gn : Tg → Tg gives a holomorphic function whose
image passes through a totally degenerate group, and hence it must be constant.
Figure 26. Cusped and totally degenerate groups on ∂Tg .
10.6
Rigidity
We now return to the setting of the Shafarevich conjecture. Let f : Z → Mg
be a nonconstant holomorphic map, let
Φ : π1 (Z) → Modg
be the corresponding monodromy map, and let
fe : H → Tg ⊂ Tg
be the lift of f to a chosen Bers’ compactification. We have
for all g ∈ π1 (Z) and z ∈ H.
fe(g · z) = Φ(g) · f (z)
187
Theorem 10.19 The boundary values of f exist for almost everywhere, and
f (ζ) is totally degenerate for almost every ζ ∈ ∂H.
Proof. The boundary values f (ζ) exist since Tg is a bounded domain in Q(X).
The radial limit points of ΓZ also have full measure.
Suppose f (ζ) exists and ζ is a radial limit. Then there exist gn ∈ ΓZ such
that gn · z → ζ for all z ∈ H. It follows that
f (ζ) = lim f (gn · z) = Φ(gn ) · f (z)
is independent of z. Since f is nonconstant, we must have Φ(gn ) → ∞ in
Modg . (Otherwise we could write f (ζ) = A · f (z) for some A ∈ Modg .) Thus
f (ζ) ∈ ∂Tg .
Let Γ(ζ) be the Kleinian group corresponding to f (ζ). If Γ(ζ) has a parabolic
then fe(ζ) lies in the locus (Tr ρ(ζ, g))2 = 2 for some g ∈ ΓZ . But the set of
such boundary values has measure zero, else ρ(ζ, g) would be parabolic for all
z ∈ H. (A bounded holomorphic function on ∆ which vanishes on a set of
positive measure in S 1 is identically zero.) Thus f (ζ) is almost surely totally
degenerate.
By Theorem 10.18 we have:
Corollary 10.20 The map f is uniquely determined by its monodromy.
Corollary 10.21 There exists a sequence gn ∈ π1 (Z) such that for any z ∈ H,
and any closed curve C, we have LC (fe(gn · z)) → ∞.
Corollary 10.22 There is no closed curve C which is invariant under the monodromy group.
This result justifies the last step in the proof of the Shafarevich conjecture
outlined above.
11
11.1
Geometrization of 3-manifolds
Topology of hyperbolic manifolds
Let M be a closed orientable smooth 3-manifold. When can we expect M to
carry a hyperbolic structure? That is, when can we hope to write M = H3 /Γ?
Here are some obvious constraints:
• First, M must be irreducible — that is, every embedded S 2 ⊂ M must
bound a ball B 3 ⊂ M . To see this, just lift to the universal cover: we find
a collection Γ · S 2 of disjoint 2-spheres in H3 , and the balls Γ · B 3 they
bound are disjoint, so they determine an embedded ball in H3 .
Irreducibility means if M = A#B then A or B is S 3 .
188
• Second, π1 (M ) must be infinite — since the universal cover of M is not
compact.
• Finally, M must be atoroidal: that is, π1 (M ) cannot contain a copy of
Z ⊕ Z.
For a proof, note that the centralizer of a hyperbolic element in Isom+ (H3 )
is isomorphic to C∗ = S 1 × R. If G ⊂ C∗ is a discrete, torsion-free group,
then G maps injectively by absolute value to a discrete subgroup of R∗ ,
and hence G is trivial or Z.
Conjecture 11.1 A closed, irreducible orientable 3-manifold is hyperbolic iff
π1 (M ) is infinite and does not contain Z ⊕ Z.
Now suppose M is an oriented manifold with boundary, admitting a convex
hyperbolic structure. Let τ : ∂M → ∂M be a fixed-point free, orientationreversing involution. Then M/τ is also an orientable manifold. We will allow
M to be disconnected but require M/τ to be connected.
When can we expect the closed manifold M/τ to be hyperbolic? Let us
apply the criteria above.
1. First, M/τ must be irreducible. There is danger that a pair of properly
embedded 2-disks D1 ⊔ D2 ⊂ M might get glued together by τ to form a
2-sphere. If ∂Di is nontrivial in π1 (∂M ), then D1 ∪ D2 cannot bound a
ball and so M/τ is reducible.
To guard against this possibility we will assume ∂M is incompressible.
This means
π1 (∂M, ∗) ֒→ π1 (M, ∗)
is injective for every choice of basepoint. Then M/τ is guaranteed to be
irreducible.
2. Since M is hyperbolic, each of its boundary components has genus g ≥ 2,
and by van Kampen’s theorem π1 (∂M/τ ) injects into π1 (M ). So π1 (M )
is always infinite.
3. Finally M/τ must be atoroidal. Here the danger is that M might contain
two or more cylinders Ci — properly embedded copies of S 1 × [0, 1] —
which are glued together by τ to form an incompressible torus in M .
To guard against this possibility, one can require that M is acylindrical —
i.e., that every cylinder C : S 1 × [0, 1] → M is homotopic, rel boundary,
into ∂M .
More liberally, one can allow cylinders but require that they not be glued
together. That is, we can simply require that M/τ is atoroidal.
Theorem 11.2 (Thurston) Let M admit a convex hyperbolic structure. Then
M/τ is hyperbolic iff it is atoroidal.
189
11.2
The skinning map
Let M be an oriented compact 3-manifold with incompressible boundary, admitting a convex hyperbolic structure. Let τ : M → M be an orientation-reversing
fixed-point free involution.
The skinning map
σ : Teich(∂M ) ∼
= GF (M ) → Teich(∂M )
is defined as follows. Given a Riemann surface X ∈ Teich(∂M ), construct the
unique complete hyperbolic 3-manifold N ∈ GF (M ) with ∂N ∼
= X. Next, form
the covering space Q → N corresponding to ∂N . Topologically we have:
Q∼
= (∂N ) × R.
The manifold Q is convex cocompact, and naturally marked by ∂M , so we have
Q ∈ GF (∂M × [0, 1]) ∼
= Teich(∂M ) × Teich(∂M ).
The projection to the second factor above is the skinning map. That is,
∂Q = ∂N ⊔ σ(∂N ).
Theorem 11.3 The manifold M/τ is hyperbolic if
τ ◦ σ : Teich(∂M ) → Teich(∂M )
has a fixed-point.
Remark. This theorem is not quite iff. If M = S ×[0, 1], then σ is the reflection
map, and M/τ is hyperbolic iff τ comes from a pseudo-Anosov automorphism
of S. But in the pseudo-Anosov case, τ ◦ σ has no fixed-point in Teichmüller
space. Indeed, τ ◦ σ has a fixed-point iff M/τ is finitely covered by S × S 1 —
in which M admits an H2 × R structure but no H3 structure.
\sigma(X)
\Sinf^2
U_X
Figure 27. The skinning map.
190
11.3
The Theta conjecture
Theorem 11.4 Let X = ∆/Γ be a finite-area hyperbolic surface presented as
the quotient of the unit disk by a Fuchsian group. Then the natural map
θ : Teich(X) → Teich(∆)
is a contraction for the Teichmüller metric. In fact
kdθ∗ k = kΘ∆/X k < C(X) < 1
where C(X) depends only on the location of X in moduli space, and
Θ∆/X : Q(∆) → Q(X)
is the Poincaré series operator given by
Θ∆/X (φ) =
X
γ ∗ φ.
Γ
Corollary 11.5 Let f : X → Y be a Teichmüller mapping between two points
in Teich(S). Then the lift fe : ∆ → ∆ to the universal covers is not extremal
among all quasiconformal maps with the same boundary values, unless f is
conformal.
Example [Str1]. Let f : X → Y be an affine stretch from a square torus to
a rectangular torus, respecting the origin. The punctured surfaces X ∗ and Y ∗
obtained by removing the origin are hyperbolic, and f restricts to a Teichmüller
mapping between them.
The universal cover of X ∗ (Y ∗ ) can be thought of as a countable collection
of squares (rectangles) with their vertices removed, and glued together along
their edges in the pattern of a free group Z ∗ Z to form a thickened tree. The
lifted map fe sends each square to the corresponding rectangle.
To make fe more nearly conformal, we want to make the target more nearly
square. A single rectangle R0 can be made more square (its modulus can be
moved towards 1) by bending its short edges in and its long edges out. Now
one edge Ei on each adjacent rectangle Ri has been bent the wrong way. The
remaining 3 edges, however, can be bent the right way, resulting in an overall
improvement in shape (Figure 28). The next layer of 12 rectangles each have
only one edge committed, and similarly for each following layer of 4 · 3n rectangles... so we can continue modifying fe to reduce its dilatation on each square,
in the end obtaining a map g with the same boundary values but K(g) < K(f ).
Corollary 11.6 If M is an acylindrical manifold, then the skinning map
σM : Teich(∂M ) → Teich(∂M )
satisfies
with C(·) as above.
kdσM (X)k ≤ C(X) < 1
191
Figure 28. Strebel’s idea of relaxation.
References
[AS]
R. Abrahams and S. Smale. Nongenericity of Ω-stability. In Global
Analysis, pages 5–8. Am. Math. Soc., 1970.
[Ah1]
L. Ahlfors. Finitely generated Kleinian groups. Amer. J. of Math.
86(1964), 413–429.
[Ah2]
L. Ahlfors. Conformal Invariants: Topics in Geometric Function Theory. McGraw-Hill Book Co., 1973.
[And]
G. Anderson. Projective Structures on Riemann Surfaces and Developing Maps to H3 and CPn . Mem. Amer. Math. Soc., To appear.
[Bers1] L. Bers. Inequalities for finitely generated Kleinian groups. J. d’Analyse
Math. 18(1967), 23–41.
[Bers2] L. Bers. An extremal problem for quasiconformal maps and a theorem
by Thurston. Acta Math. 141(1978), 73–98.
[Bers3] L. Bers. Holomorphic families of isomorphisms of Möbius groups. J.
of Math. of Kyoto University 26(1986), 73–76.
[BR]
L. Bers and H. L. Royden. Holomorphic families of injections. Acta
Math. 157(1986), 259–286.
[BDK]
P. Blanchard, R. Devaney, and L. Keen. The dynamics of complex
polynomials and automorphisms of the shift. Inv. Math. 104(1991),
545–580.
[Bon]
F. Bonahon. The geometry of Teichmüller space via geodesic currents.
Invent. math. 92(1988), 139–162.
[Bo]
R. Bowen. Hausdorff dimension of quasi-circles. Publ. Math. IHES
50(1978), 11–25.
[Br]
B. Branner. Cubic polynomials: turning around the connectedness locus. In L. R. Goldberg and A. V. Phillips, editors, Topological Methods
in Modern Mathematics, pages 391–427. Publish or Perish, Inc., 1993.
192
[CG]
L. Carleson and T. Gamelin. Complex Dynamics. Springer-Verlag,
1993.
[CJ]
A. Casson and D. Jungreis. Convergence groups and Seifert fibered
3-manifolds. Invent. math. 118(1994), 441–456.
[DPRS] J. Dodziuk, T. Pignataro, B. Randol, and D. Sullivan. Estimating small
eigenvalues of Riemann surfaces. In The Legacy of Sonya Kovalevskaya,
Contemp. Math., 64, pages 93–121. Amer. Math. Soc., 1987.
[Dou]
A. Douady. Prolongement de mouvements holomorphes (d’après
Slodkowski et autres). In Séminaire Bourbaki, 1993/94, pages 7–20.
Astérisque, vol. 227, 1995.
[DH]
A. Douady and J. Hubbard. A proof of Thurston’s topological characterization of rational maps. Acta Math. 171(1993), 263–297.
[EaM]
C. Earle and C. McMullen. Quasiconformal isotopies. In Holomorphic Functions and Moduli I, pages 143–154. Springer-Verlag: MSRI
publications volume 10, 1988.
[ES]
C. J. Earle and P. L. Sipe. Families of Riemann surfaces over the
punctured disk. Pacific J. Math. 150(1991), 79–96.
[Ep1]
C. L. Epstein. The hyperbolic Gauss map and quasiconformal reflections. J. reine angew. Math. 372(1986), 96–135.
[Ep2]
C. L. Epstein. Univalence criteria and surfaces in hyperbolic space. J.
reine angew. Math. 380(1987), 196–214.
[FS]
M. H. Freedman and R. Skora. Strange actions of groups on spheres.
J. Differential Geom. 25(1987), 75–98.
[Ga]
F. Gardiner. Teichmüller Theory and Quadratic Differentials. Wiley
Interscience, 1987.
[GK]
L. R. Goldberg and L. Keen. The mapping class group of a generic
quadratic rational map and automorphisms of the 2-shift. Invent. math.
101(1990), 335–372.
[Ha]
K. T. Hahn. On completeness of the Bergman metric and its subordinate metric. Proc. Natl. Acad. Sci. USA 73(1976).
[HP]
J. L. Harer and R. C. Penner. Combinatorics of Train Tracks, volume
125 of Annals of Math. Studies. Princeton University Press, 1992.
[Hem]
J. Hempel. 3-Manifolds, volume 86 of Annals of Math. Studies. Princeton University Press, 1976.
[Her]
M. Herman. Exemples de fractions rationelles ayant une orbite dense
sur la sphere de Riemann. Bull. Soc. Math. de France 112(1984), 93–
142.
193
[Hub]
J. H. Hubbard. Sur les sections analytiques de la courbe universelle de
Teichmüller. Mem. Amer. Math. Soc., No. 166, 1976.
[IS]
Y. Imayoshi and H. Shiga. A finiteness theorem for holomorphic families of Riemann surfaces. In Holomorphic Functions and Moduli II,
pages 207–219. Springer-Verlag: MSRI publications volume 11, 1988.
[IT]
Y. Imayoshi and M. Taniguchi. An Introduction to Teichmüller Spaces.
Springer-Verlag, 1992.
[JR]
K. N. Jones and A. W. Reid. Vol3 and other exceptional hyperbolic
3-manifolds. Proc. Amer. Math. Soc. 129(2001), 2175–2185.
[KP]
M. E. Kapovich and L. D. Potyagaı̆lo. On the absence of finiteness theorems of Ahlfors and Sullivan for Kleinian groups in higher dimensions.
Sibirsk. Mat. Zh. 32(1991), 61–73.
[KS1]
L. Keen and C. Series. Pleating coordinates for the Maskit embedding
of the Teichmüller space of a punctured torus. Topology 32(1993),
719–749.
[KS2]
L. Keen and C. Series. How to bend pairs of punctured tori. In Lipa’s
Legacy (New York, 1995), pages 359–387. Amer. Math. Soc., 1997.
[Ker]
S. Kerckhoff. The Nielsen realization problem.
177(1983), 235–265.
[Kra]
I. Kra. Horocyclic coordinates for Riemann surfaces and moduli spaces.
I. Teichmller and Riemann spaces of Kleinian groups. J. Amer. Math.
Soc. 3(1990), 499–578.
[La]
S. Lang. Introduction to Complex Hyperbolic Spaces. Springer-Verlag,
1987.
[Lat]
S. Lattès. Sur l’iteration des substitutions rationelles et les fonctions
de Poincaré. C. R. Acad. Sci. Paris 166(1918), 26–28.
[Le]
O. Lehto. Univalent functions and Teichmüller spaces. Springer-Verlag,
1987.
[LV]
O. Lehto and K. J. Virtanen. Quasiconformal Mappings in the Plane.
Springer-Verlag, 1973.
[Ly]
M. Lyubich. An analysis of the stability of the dynamics of rational
functions. Selecta Math. Sov. 9(1990), 69–90.
[Me]
R. Mañé. On the instability of Herman rings. Invent. math. 81(1985),
459–471.
[MSS]
R. Mañé, P. Sad, and D. Sullivan. On the dynamics of rational maps.
Ann. Sci. Éc. Norm. Sup. 16(1983), 193–217.
194
Ann. of Math.
[Msk]
B. Maskit. On a class of Kleinian groups. Ann. Acad. Sci. Fenn. Ser.
A I 442(1969), 8 pp.
[MT]
H. Masur and S. Tabachnikov. Rational billiards and flat structures.
In Handbook of Dynamical Systems, Vol. 1A, pages 1015–1089. North–
Holland, 2002.
[Mc1]
C. McMullen. Automorphisms of rational maps. In Holomorphic Functions and Moduli I, pages 31–60. Springer-Verlag, 1988.
[Mc2]
C. McMullen. Braiding of the attractor and the failure of iterative
algorithms. Invent. math. 91(1988), 259–272.
[Mc3]
C. McMullen. Rational maps and Kleinian groups. In Proceedings
of the International Congress of Mathematicians (Kyoto, 1990), pages
889–900. Springer-Verlag, 1991.
[Mc4]
C. McMullen. Complex Dynamics and Renormalization, volume 135 of
Annals of Math. Studies. Princeton University Press, 1994.
[Mc5]
C. McMullen. Renormalization and 3-Manifolds which Fiber over the
Circle, volume 142 of Annals of Math. Studies. Princeton University
Press, 1996.
[Mc6]
C. McMullen. Hausdorff dimension and conformal dynamics III: Computation of dimension. Amer. J. Math. 120(1998), 691–721.
[Mc7]
C. McMullen. Hausdorff dimension and conformal dynamics I: Kleinian
groups and strong limits. J. Diff. Geom. 51(1999), 471–515.
[Mc8]
C. McMullen. From dynamics on surfaces to rational points on curves.
Bull. Amer. Math. Soc. 37(2000), 119–140.
[Mc9]
C. McMullen. The moduli space of Riemann surfaces is Kähler hyperbolic. Annals of Math. 151(2000), 327–357.
[McS]
C. McMullen and D. Sullivan. Quasiconformal homeomorphisms and
dynamics III: The Teichmüller space of a holomorphic dynamical system. Adv. Math. 135(1998), 351–395.
[MeSt]
W. de Melo and S. van Strien. One-Dimensional Dynamics. SpringerVerlag, 1993.
[Mo]
M. Möller. Variations of Hodge structures of a Teichmüller curve. J.
Amer. Math. Soc. 19(2006), 327–344.
[Mon]
P. Montel. Familles Normales. Gauthiers-Villars, 1927.
[MMW] D. Mumford, C. McMullen, and D. Wright. Limit sets of free twogenerator kleinian groups. Preprint, 1990.
195
[Nag]
S. Nag. The Complex Analytic Theory of Teichmüller Space. Wiley,
1988.
[Ot]
J.-P. Otal. Le théorème d’hyperbolisation pour les variétés fibrées de
dimension trois. Astérisque, vol. 235, 1996.
[PP]
W. Parry and M. Pollicott. Zeta Functions and the Periodic Orbit
Structure of Hyperbolic Dynamics. Astérisque, vol. 187–188, 1990.
[Pu]
C. C. Pugh. The closing lemma. Amer. J. Math. 89(1967), 956–1009.
[Rat]
J. G. Ratcliffe. Foundations of Hyperbolic Manifolds. Springer-Verlag,
1994.
[Rs]
M. Rees. Positive measure sets of ergodic rational maps. Ann. scient.
Éc. Norm. Sup. 19(1986), 383–407.
[RS]
B. Rodin and D. Sullivan. The convergence of circle packings to the
Riemann mapping. J. Differential Geom. 26(1987), 349–360.
[Sch]
W. Schmid. Variation of Hodge structure: the singularities of the
period mapping. Invent. math. 22(1973), 211–319.
[Sn]
L. Schneps, editor. The Grothendieck theory of dessins d’enfants (Luminy, 1993), volume 200 of London Math. Soc. Lecture Note Ser. Cambridge Univ. Press, 1994.
[Sch]
R. Schwartz. Pappus’ theorem and the modular group. Publ. Math.
IHES 78(1993), 187–206.
[Sc]
P. Scott. Subgroups of surface groups are almost geometric. J. London
Math. Soc. 17(1978), 555–565.
[Shi]
M. Shishikura. On the quasiconformal surgery of rational functions.
Ann. Sci. Éc. Norm. Sup. 20(1987), 1–30.
[Sl]
Z. Slodkowski. Holomorphic motions and polynomial hulls. Proc.
Amer. Math. Soc. 111(1991), 347–355.
[Sm]
S. Smale. Structurally stable systems are not dense. Am. J. of Math.
88(1966), 491–496.
[Str1]
K. Strebel. On lifts of extremal quasiconformal mappings. J. d’Analyse
Math. 31(1977), 191–203.
[Str2]
K. Strebel. Quadratic Differentials. Springer-Verlag, 1984.
[Sul1]
D. Sullivan. A finiteness theorem for cusps. Acta Math. 147(1981),
289–299.
196
[Sul2]
D. Sullivan. On the ergodic theory at infinity of an arbitrary discrete group of hyperbolic motions. In I. Kra and B. Maskit, editors,
Riemann Surfaces and Related Topics: Proceedings of the 1978 Stony
Brook Conference, volume 97 of Annals of Math. Studies. Princeton
University Press, 1981.
[Sul3]
D. Sullivan. Discrete conformal groups and measurable dynamics. Bull.
Amer. Math. Soc. 6(1982), 57–74.
[Sul4]
D. Sullivan. Quasiconformal homeomorphisms and dynamics I: Solution of the Fatou-Julia problem on wandering domains. Annals of
Math. 122(1985), 401–418.
[Sul5]
D. Sullivan. Quasiconformal homeomorphisms and dynamics II: Structural stability implies hyperbolicity for Kleinian groups. Acta Math.
155(1985), 243–260.
[Sul6]
D. Sullivan. Related aspects of positivity in Riemannian geometry. J.
Diff. Geom. 25(1987), 327–351.
[Thom] R. Thom. L’equivalence d’une fonction différentiable et d’un polynôme.
Topology 3(1965), 297–307.
[Tm]
R. Thom. Structural stability and morphogenesis. Addison-Wesley,
1989.
[Th]
W. P. Thurston. Zippers and univalent functions. In A. Baernstein et
al, editor, The Bieberbach conjecture, pages 185–197. Amer. Math.
Soc., 1986.
[Wil]
R. F. Williams. The “DA” maps of Smale and structural stability. In
Global Analysis, pages 329–334. Am. Math. Soc., 1970.
[Wol1]
S. Wolpert. On the homology of the moduli space of stable curves.
Annals of Math. 118(1983), 491–523.
[Wol2]
S. Wolpert. Geodesic length functions and the Nielsen problem. J.
Diff. Geom. 25(1987), 275–296.
[Wr]
D. Wright. The shape of the boundary of Maskit’s embedding of the
Teichmüller space of once-punctured tori. Preprint, 1990.
[Y]
J.-C. Yoccoz. Petits diviseurs en dimension 1. Astérisque, vol. 231,
1995.
197