Eigenvalue method with the same real eigenvalue
advertisement

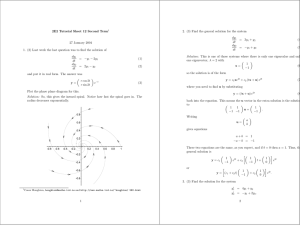
LECTURE 27: EIGENVALUE METHOD AND NONHOMOGENEOUS SYSTEM MINGFENG ZHAO November 18, 2015 Eigenvalue method with the same real eigenvalue Let A be a 2 × 2 matrix with the same real eigenvalue λ and ~v be the eigenvector corresponding to λ, then ~x(t) = eλt~v is a solution to ~v 0 = A~x. • If λI2 − A = 0, then 1 0 and are two linearly independent eigenvectors corresponding to λ, that is, λ 0 1 is a complete eigenvalue of A. Hence the general solution to ~x0 = A~x is 1 0 + eλt . ~x(t) = eλt 0 1 • If λI2 − A 6= 0, that is, λ is a defective eigenvalue of A, then another linearly independent solution ~y to ~x0 = A~x has the form ~y (t) = eλt (t~v + w) ~ for some vector w ~ to be determined. That is, ~y (t) = t~x(t) + eλt w. ~ So we get ~y 0 (t) = ~x(t) + t~x0 (t) + λeλt w ~ = ~x(t) + tA~x(t) + λeλt w ~ = A~y (t) = tA~x(t) + eλt Aw. ~ Then ~x(t) + λeλt w ~ = eλt Aw, ~ that is, eλt~v + λeλt w ~ = eλt Aw, ~ so w ~ is a solution to ~v + λw ~ = Aw, ~ that is, (A − λI2 )w ~ = ~v . In this case, we have (A − λI2 )2 w ~ = (A − λI2 )~v = 0, we call w ~ a generalized eigenvector of A. Example 1. Solve ~x0 = 2 0 2 0 0 2 ~x. , it’s easy to see that A has only one eigenvalue λ = 2 and A − 2I2 = 0, that is, λ = 2 is a complete 0 2 eigenvalue of A. So the general solution to ~x0 = A~x is: Let A = ~x(t) = C1 e2t 1 + C2 e2t 0 0 1 1 . 2 MINGFENG ZHAO x0 = 3x1 + x2 1 Example 2. Find the general solution to . x0 = 3x 2 2 x0 = 3x1 + x2 3 1 The coefficient matrix of the system is A = x0 = 3x 0 2 2 det (A − λI2 ) = det 1 . First, let’s find eigenvalues of A, then 3 3−λ 1 0 3−λ = (3 − λ)2 = 0. Then λ1 = λ2 = 3. Now let’s solve 3 1 x1 0 3 0 −1 0 0 x1 = 3 x2 . x2 Then So x1 x2 = x1 1 x1 = x2 0 . 0 . Hence we know that λ = 3 is the only one eigenvalue for A, and ~v = 0 1 is the eigenvector. 0 Then ~y (t) = e3t~v is a solution to ~x0 = A~x. Let ~x = e3t (t~v + w) ~ = t~y (t) + e3t w ~ be another linearly independent solution to ~x0 = A~x, then ~x0 = ~y (t) + t~y 0 (t) + 3e3t w ~ = A(t~y (t) + e3t w) ~ = tA~y (t) + e3t Aw. ~ Since ~y (t) is a solution to ~x0 = A~x, then ~y (t) + 3e3t w ~ = e3t Aw. ~ Since ~y (t) = e3t~v , then e3t~v + 3e3t w ~ = e3t Aw, ~ that is, ~v + 3w ~ = Aw. ~ Hence, (A − 3I2 )w ~ = ~v , that is, 0 1 w1 0 0 So we can take w1 = 0 and w2 = 1, that is, w ~ = = w2 0 1 0 . So another solution is 1 e3t (t~v + w) ~ = e3t t 1 0 + 0 1 = e3t t 1 . LECTURE 27: EIGENVALUE METHOD AND NONHOMOGENEOUS SYSTEM 3 Therefore, the general solution to ~x0 = A~x is: ~x = C1 e3t 1 + C2 e3t 0 t −1 . Undetermined coefficients Theorem 1. Let ~xc (t) be the general solution to the homogeneous system ~x0 = A~x, and ~xp (t) be a particular solution to ~x0 = A~x + f~(t), then the general solution to ~x0 = A~x + f~(t) is: ~x(t) = ~xc (t) + ~xp (t). Let A be a 2 × 2 matrix,, consider the system: ~x0 = A~x + f~(t). Let p~n (t) and ~qn (t) be “vector coefficients” polynomials with degree n. If f~(t) has the form: p~n (t)emt cos(kt) + ~qn (t)emt sin(kt), then a particular solution ~xp (t) to ~x0 = A~x + f~(t) can be take as: ~xp (t) = p~n+α (t)emt cos(kt) + ~qn+α (t)emt sin(kt), where • α is one of 0, 1 and 2 (α is the multiplicity of m + ki as the eigenvalues to A): – If m + ki is not an eigenvalue of A, then α = 0. – If m + ki is an eigenvalue of Aand A has two different eigenvalues, then α = 1. – If m + ki is an eigenvalue of A and A has only one eigenvalue, then α = 2. • p~n+α (t) and ~qn+α (t) are undetermined “vector coefficients” polynomials with degree n + α. Remark 1. The method of undetermined coefficients for the system is NOT required in Exams. But it’s better to know this method, since sometimes it can help you find particular solutions easily. Example 3. Let A = −1 0 −2 1 . Find a particular solution of ~x0 = A~x + f~(t), where f~(t) = et t . 4 MINGFENG ZHAO First, let’s find the eigenvalues of A, that is, det (A − λI2 ) = det −1 − λ 0 −2 1−λ = (−λ − 1)(1 − λ) = 0, then λ1 = 1 and λ2 = −1. Notice that f~(t) = et 1 = 1 0 et + 0 t. 1 So we can let ~xp (t) = (~at + ~b)et + ~ct + d~ be a particular solution to ~x0 = A~x = f~(t), then ~x0p (t) = ~aet + ~atet + ~bet + ~c = A~xp (t) + f~(t) 1 = A~atet + A~bet + A~ct + Ad~ + et + 0 0 t. 1 Then we have A~a = ~a, A~b + 1 = ~a + ~b, A~c + 0 0 = 0, ~ and ~c = Ad. 1 Solve ~a, ~b, ~c, m and n, we can take 1 0 , ~b = 2 , ~a = 0 −1 ~c = 0 −1 , and d~ = 0 −1 . So a particular solution to ~x0 = A~x + f~(t) is: ~xp (t) = 0 −1 tet + 1 2 et + 0 Example 4. Find the general solution to ~x0 = Let A = 1 1 4 −2 and f~(t) = − et et det (A − λI2 ) = det 1 1 4 −2 0 −1 t + ~x − et et 0 −1 = 1 t 2e t −te − t − 1 . . . First, let’s find the eigenvalues of A, that is, 1−λ 1 4 −2 − λ = (1 − λ)(−2 − λ) − 4 = λ2 + λ − 6 = 0. Then λ1 = −3, and λ2 = 2. LECTURE 27: EIGENVALUE METHOD AND NONHOMOGENEOUS SYSTEM Since − et e t = −1 −1 5 et , let ~xp (t) = ~aet be a particular solution to ~x0 = A~x + f~(t), then ~x0p (t) = ~aet = A~aet + −1 −1 et . So we get (I2 − A)~a = −1 −1 . That is, 0 −1 −4 3 a1 = a2 −1 −1 . Then ~a = 1 . 1 So ~xp (t) = 1 et is a particular solution to ~x0 = A~x + f~(t). 1 Problems you can do: Lebl’s Book [1]: Exercise 3.9.4 c), 3.9.5 c), 3.9.101 c), 3.9.102 c), 3.9.103 (use undetermined coefficients) on Page 146 and Page 147. References [1] Jiri Lebl. Notes on Diffy Qs: Differential Equations for Engineers. Createspace, 2014. Department of Mathematics, The University of British Columbia, Room 121, 1984 Mathematics Road, Vancouver, B.C. Canada V6T 1Z2 E-mail address: mingfeng@math.ubc.ca