Document 11158447
advertisement

Digitized by the Internet Archive
in
2011 with funding from
Boston Library Consortium IVIember Libraries
http://www.archive.org/details/fragilityofasympOOacem
DEWEY
Massachusetts Institute of Technology
Department of Economics
Working Paper Series
FRAGILITY OF ASYMPTOTIC
AGREEMENT
UNDER BAYESIAN LEARNING
Daron Acemoglu
Victor Chernozhukov
Muhammet Yildiz
Working Paper 08-09
March 15,2008
Room
E52-251
50 Memorial Drive
Cambridge, MA 02142
This paper can be downloaded without charge from the
Social Science Research Network
Paper Collection
http://ssrn.com/abstract=1 11 2855
HB31
.M415
at
Fragility of
Asymptotic Agreement mider Bayesian
Learning*
Daron Acemoglu, Victor Chernozhukov, and Muliamet
March
Yildiz'^
2008.
Abstract
Under the assumption that individuals know the conditional
distributions of signals
given the payoff-relevant parameters, existing results conclude that, as individuals observe infinitely
We
first
many
signals, their beliefs
show that these
signal distributions:
about the parameters
results are fragile
when
will eventually
merge.
individuals are uncertain about the
given any such model, a vanishingly small individual uncertainty
about the signal distributions can lead to a substantial (non- vanishing) amount of differbeliefs. We then characterize the conditions under which
a small amount of uncertainty leads only to a small amount of asymptotic disagreement.
ences between the asymptotic
According to our characterization, this is the case if the uncertainty about the signal
distributions is generated by a family with "rapidly-varying tails" (such as the normal
or the exponential distributions). However, when this famity has "regularly- varying
tails"
(such as the Pareto, the log-normal, and the t-distributions), a small
amount
of
uncertainty leads to a substantial amount of asymptotic disagreement.
Keywords: asymptotic
JEL
disagreement, Bayesian learning, merging of opinions.
Classification: Cll, C72, D83.
*An earlier version of tliis paper was circulated under the title "Learning and Disagreement in an
Uncertain World". We thank Eduardo Faingold, Greg Fisher, Bengt Holmstrom, Ma.tthew Jackson,
Drew Pudenberg, Alessandro Lizzeri, Giuseppe Moscarini, Marciano Sinscalchi, Robert Wilson and
seminar participants at MIT, the University of British Columbia, Universitj' of Illinois at UrbanaChampaign, Stanford and Yale
for useful
comments and
suggestions.
''Department of Economics, Massachusetts Institute of Technology.
Introduction
1
The common
prior assumption
is
one of the cornerstones of modern economic analy-
Most models postulate that the
sis.
world," or
more
payoff distributions
meter vector) 9
is
—
for
example, they
drawn from a known
prior assumption
all
agree that
comes from
prior about the
some
of
9.
The
of the
game form and
state (payoff-relevant para-
distribution G, even though each
some components
additional information about
common
common
they have a
precisely, that
game have the "same model
players in a
may
also have
typical justification for the
learning; individuals, through their
own
experi-
ences and the communication of others, will have access to a history of events informative
about the state
distribution of
6*,
9.
and
A
this process will lead to "agreement"
strong version of this view
the statement that a Bayesian individual,
truth," will learn
An
it
individuals about the
expressed in Savage (1954,
is
who does
p.
48) as
not assign zero probability to "the
eventually as long as the signals are informative about the truth.
immediate implication of
sequence of signals
among
^^^ll
this result
is
that two individuals
ultimately agree, even
if
observe the same
they start with very different priors.
Despite this powerful intuition, disagreement
practice. For example, there
who
is
the rule rather than the exception in
typically considerable disagreement even
is
among
econo-
mists working on a certain topic. Similarly, there are deep divides about rehgious beliefs
within populations with shared experiences. In most cases, the source of disagreement
does not seem to be differences in observations or experiences. Instead, individuals ap-
pear to interpret the available data
subsidies increase investment
with different
priors.
An
ment appears more hkely
is
we
interpreted very differently
to judge the data or the
less
investigate the
two Bayesian individuals
For example, an estimate showing that
by two economists starting
economist beheving that subsidies have no
be unreliable and thus to attach
In this paper,
differently.
wth
importance to
outcome
different priors
methods leading
on
invest-
to this estimate to
this evidence.
of learning
about an uiiderlying state by
when they
are possibly unceHain about
the conditional distributions (or interpretations) of signals.
identification problem, as the
effect
same long-run frequency
This leads to a potential
of sigiials
may
result
from
differ-
ent combinations of payoff-relevant variables and different interpretations of the signals.
Hence, even though the individuals
may
will learn the
not always be able to infer the state
9,
and
translate into differences in asymptotic beliefs.
asymptotic frequency of signals, they
initial differences in their beliefs
When
the amount of uncertainty
is
may
small.
the identification problem
he
likely that
\vill
also small in the sense that each individual finds
is
eventually assign high probability to the true state.
it
highly
One may then
expect that the asymptotic beliefs of the two individuals about the underlying states
should be close as
well.
If so,
the
common
prior assumption
would be a good approxi-
mation when players have a long common experience and face only a small amount of
uncertainty about
Our
ticular,
how
the signals are related to the states.
focus in this paper
to investigate the validity of this line of argument. In par-
is
we study whether asymptotic agreement
agreement
continuous at certainty
is
if
is
at certainty.
Asymptotic
Our main
result
shows that asymptotic
discontinuous at certainty for every model: for every model there
amount
ishingly small
probability
continuous
a small amount of uncertainty leads only to a
small amount of disagreement asymptotically.
agreement
is
1
of uncertainty that
is
is
a van-
each individual to assign nearly
sufficient for
that they will asymptotically hold significantly different beliefs about the
underlying state. This result implies that learning foundations of
common
prior are not
as strong as one might have thought.
Before explaining our main result and
about the environment we study.
of signals, {S(}"^q,
and form
feature of the environment
Two
its intuition, it is
about the state
that these individuals
may be
bution of signals conditional on the underlying state.
state
and the
signal are binary, e.g., 6
Pr
=
=
[st
9
\
9)
po
is
not a
details
uncertain about the distri-
In the simplest ca,se where the
e {A,B}, and
known number, but
The only non-standard
6.
Sj
G {a.b},
Fg as individual's subjective probability distribution and to
This distribution, which can
differ
its
i
=
imphes that
among
We
individuals,
probability distributions are non-degenerate, individuals will have
The presence
1,2.
refer to
density fg as subjective
ural measure of their uncertainty about the informativeness of signals.
terpreting the sequence of signals they observe.
this
individuals also have a prior over pg,
say given by a cumulative distribution function Fg for each agent
(probability) density.
some
individuals with given priors observe a sequence
their posteriors
is
useful to provide
When
some
is
a nat-
subjective
latitude in in-
of subjective probability
distributions over the interpretation of the signals introduces an identification problem
and implies
that, in contrast to the standard learning environments, asymptotic learning
and asymptotic agreement are not guaranteed. In
support for each
9,
particular,
when each Fq has a
full
there will not be asymptotic learning or asymptotic agreement. Lack
of asymptotic agreement implies that two individuals with different priors observing the
same sequence
many
nitely
of signals
signals.
\vill
reach different posterior beliefs even after observing
Moreover, individuals attach ex ante probability
infi-
that they will
1
disagree after observing the sequence of signals.
Now
consider a family of subjective density functions, {/^m,}: becoming increasingly
concentrated around a single point
uncertainty
is
— thus converging to certainty.
small), each individual
bility 1 to the true value of 9.
is
ahnost certain that he
we can
is
large (and
will assign nearly
construct sequences of fg
.^
that
fail.
proba-
any (P4,Pb,P^,Pb),
In particular, for
become more and more concentrated around
but with a significant amount of asymptotic disagreement at almost
m. This establishes that asymptotic agreement
for all
m
Despite this approximate asymptotic learning, our main
shows that asymptotic agreement may
result
When
pg,
sample paths
all
discontinuous at certainty for
is
every model.
Under additional continuity and uniform convergence assumptions on the family
{fg ^},
ment
is
we
characterize the faixiihes of subjective densities under which asymptotic agree-
continuous at certainty.
p, these additional
When
and fg^ are concentrated around the same
/g„,
assumptions ensure that asymptotic agreement
tainty. Otherwise, continuity of
continuous at cer-
asymptotic agreement depends on the
the family of subjective density functions {fg
tails
is
.^„}.
\'VT.ien
tail
properties of
has regularly-varying
this family
(such as the Pareto or the log-normal distributions), even under the additional reg-
ularity conditions that ensure uniform convergence, there will be a substantial
of asymptotic disagreement.
distribution), asymptotic
The
\Vhen {fg^} has rapidly- varying
agreement
intuition for this result
each individual believes that he
other individual will
individual reacts
fail
it
be continuous at
Whether
when a frequency
certainty.
but he
may
still
or not he believes this depends on
of signals different
when
{fg,,-,}
1
wth
will
is
expect the
realized
and
that they will asymptotically agree. This
has rapidly- varying
family {/g^} has regularly-varying (thick)
how an
from the one he expects
the frequency of signals under their model of the world
what happens when the family
small,
event ensures that the individual learns 9
If this "surprise"
thus attaches probability arbitrarily close to
is
believe that the
does in the case of learning under certainty), then each individual
other to learn
is
(such as the normal
tails
Wlien the amount of uncertainty
as follows.
will learn the state 9,
to learn.
"almost certainty" occurs.
(as
is
will
amount
tails,
tails.
However, when the
an unexpected. frequencj' of signals
will
prevent the individual fi-om learning (because he interprets this as a possibility likely even
near certainty due to the thick
tails).
In this case, each individual expects the limiting
frequencies to be consistent with his model and the other individual not to learn the
true state
9,
and concludes that there
be significant asymptotic disagreement.
will
Lack of asymptotic agreement has important implications
We
situations.
illustrate
some
of these in a
for a
range of economic
companion paper by studying a number
of
simple environments where two individuals observe the same sequence of signals before
or while playing a
Our
game (Acemoglu, Chernozhukov and
doubt on the idea that the
results cast
by learning. They imply that
in
Yildiz, 2008).
common prior assumption may be justified
many environments,
even when there
uncertainty
is little
so that each individual believes that he will learn the true state, Bayesian learning
does not necessarily imply agreement about the relevant parameters.
the strategic outcomes
may be
significantly different
environments.^ ^'Vhether this assumption
setting
and
v\4iat
is
from those
common-prior
in the
warranted therefore depends on the specific
type of information individuals are trying to glean from the data.
Relating our results to the famous Blackwell-Dubins (1962) theorem
their essence. This
(i.e.,
Consequently,
may
help clarify
theorem shows that when two agents agree on zero-probability events
their priors are absolutely continuous with respect to each other), asymptotically,
they will make the same predictions about future frequencies of signals. Our results do
not contradict this theorem, since we impose absolute continuity. Instead, as pointed out
above, our results rely on the fact that agreeing about future frequencies
is
not the same
as agreeing about the underlying payoffs-relevant variables, because of the identification
problem that
arises in the presence of uncertainty.^
different possible interpretations of the
priors. In
most economic
situations,
same
what
is
This identification problem leads to
signal sequence
important
is
but some payoff-relevant parameter. For example, what
to evaluate a policy
is
is
relevant for economists trying
not the frequency of estimates on the effect of similar policies from
what may be relevant
in trading assets
is
when (and
if)
implemented.
not the frequency of information
about the dividend process, but the actual dividend that the asset
will pay.
^For previous arguments on whether game-theoretic models should be formulated with
common
diff'erent
not future frequencies of signals
other researchers, but the impact of this specific policy
Similarly,
by individuals with
Aumann
all
Thus,
individuals
and Gul (1998). Gul (1998), for instance,
questions whether the common prior assumption makes sense when there is no ex ante stage.
^In this respect, our paper is also related to Kurz (1994, 1996), who considers a situation in which
agents agree about long-run frequencies, but their beliefs fail to merge because of the non-stationarity
having a
of the world.
prior, see, for
example,
(1986, 1998)
many
situations in which individuals need to learn about a parameter or state that will
determine their ultimate payoff as a function of their action
the analysis here.
Our main
shows that even when
result
neghgible for individual learning,
and Sanchirico
imphcations to asymptotic agreement
its
Rreedman
problem
may be
of
is
large.
(1963, 1965)
and
(1999), that question the applicabihty of the absolute continuity
assumption in the Blackwell-Dubins theorem
in statistical
and Preedman, 1986, Stinchcombe, 2005).
also Diaconis
wthin the realm
this identification
In this respect, our work differs from papers, such as
Miller
falls
tant theorems in statistics, for example, Berk (1966),
and economic settings
Similarly, a
number
(see
of impor-
show that when individuals place
zero probability on the true data generating process, limiting posteriors will have their
support on the set of
ing distribution).
all
Our
identifiable values (though they
results are different
may
fail
to converge to a limit-
from those of Berk both because in our model
individuals always place positive probability on the truth and also because
tight characterization of the conditions for lack of asymptotic learning
In addition, neither Berk nor any other paper that
asymptotic agreement
Our paper
is
is
we
is
the main focus of our paper.
work by Cripps,
Samuelson (2006), who study the conditions under which there
ing"
by two agents observing correlated private
and agreement."^
are aware of investigates whether
continuous at certainty, which
also related to recent independent
we provide a
will
Ely,
Mailath and
be "common learn-
signals. Cripps, et al. focus
on a model in
which individuals start with common priors and then learn from private signals under
certainty (though they note that their results could be extended to the case of non-
common
priors).
They show
that individual learning ensures "approximate
knowledge" when the signal space
contrast,
we
is finite,
but not necessarily when
common
In
it is infinite.
focus on the case in which the agents start with heterogenous pri,ors and
learn from public signals under uncertxanty or under approximate certainty.
signals are public in our model, there
is
no
difficulty in achieving
approximate
Since
all
common
knowledge.''
^In dynamic games, another source of non-learning (and tlius lack of convergence to
is
that
some subga.mcs arc never
information that contradict
visited along the equilibrium
tlieir beliefs
1993, Fudenberg and Kreps, 1995).
to learn or
fail
to reach
Our
path
about payoffs in these subgames
results differ
agreement despite
tlie fact
from those
common
prior)
do not observe
Fudenberg and Levine,
a.nd thus players
(see,
in this literature, since individuals fail
that they receive signals about
all
payoff-relevant
variables.
''Put differently,
al.
we
as whether a pla3rer thinks that the other player will learn, whereas Cripps et
ask whether a player
player will learn.
i
thinks
tliat tlic
other player j thinks that
i
thinks that j thinks that
...
a
The
paper
rest of the
organized as follows. Section 2 provides a number of prelimi-
is
nary results focusing on the simple case of two states and two
signals. Section 3 contain
our main results at characterizing the conditions under which agreement
is
continuous
at certainty. Section 4 provides generalizations of these results to an environment with
K
states
and L >
K
Section 5 concludes, while the Appendix contains the
signals.
proofs omitted from the text.
The Two- State Model and Preliminary Results
2
2 1
.
Environment
We start wth
a two-state model with binary signals. This model
our main results in the simplest possible setting.
all
arbitrary
number
and signal values
of states
St
assigns ex ante probability
9,
G {a,b}. The underlying state
is
G
n'^
the signals are exchangeable,
with an unknown
distribution.'"'
unknown number
p.4;
number pb
in Section 4.
2,
to
(0, 1)
i.e.,
i
6*
=
=
That
Our main departure from
is,
most of the
G
observe a sequence
{/I,
St
=
b
St
=
given 9
a given 9
= B
i
is
= A
is
an
an unknowm
B
Pa
i
1
- Pa
1
-Pb
Pb
We
—namely,
is
that
we
denote the cumulative distribution function of pg
his subjective probability distribution
degenerate (Dirac) and puts probabihty
analysis,
we
will
allow the individuals to
1
at
model
—by
Fg. In the
somepg. In contrast,
impose the foUowng assumption:
^See, for example, Billingslcy (1995). If there were only one state, then our
De
5}, and agent
individuals believe that, given
the probability of
the standard models
and pe-
p.4
according to individual
for
who
in the following table:
b
is
i
The
y4.
A
standard models, Fg
and
they are independently and identically distributed
a
be uncertain about
1
likewse, the probabihty of
—as shown
sufficient to establish
results are generalized to
=
There are two individuals, denoted by
of signals {sf}"^Q where
These
is
model would be iden-
example, Savage, 1954). In the context of this model,
De Finetti's theorem provides a Bayesian foundation for classical probability theory by showing that
exchangeability (i.e., invariance under permutations of the order of signals) is equivalent to having an intical to
Finetti's canonical
(see, for
dependent identical unknown distribution and implies that posteriors converge to long-run frequencies.
De Finetti's decomposition of probability distributions is extended by Jackson, Kalai and Smorodinsky
(1999) to cover cases without exchangeability.
Assumption
over
1 For each
and
i
Fg has a continuous, non-zero and finite density fl
9,
[0, 1].
The assumption
Assumption
1 is
implies that F^ has full support over
we assume
that 7r\
=
consider infinite sequences s
n"^
,
Fg and Fg are
{sfj^'^j
of signals
such sequences. The posterior belief of individual
signals {5t}";^i
(^
=
{.S/}"^j)
.4
sequence of signals,
does not matter
and
about 9
i
to both individuals.^
S
v.Tite
for the set of all
after observing the first
n
= A\{s,}l,),
=A
denotes the posterior probability that 9
s, is
tt'
=
St
Tn{s) /n converges to
Since the
Fg.
generated by an exchangeable process, the order of the signals
only depends on
for the posterior. It
of times
given a sequence
and subjective probability distribution
= #{t<
rnis)
number
known
|
of signals {5(}"^j under prior
the
2,
is
<t/„is)^F,^{9
where Pr'
Remark
in
stronger than necessar)' for our results, but simplifies the exposition. In
addition, throughout
We
As discussed
[0, 1].
a out of
first
some p{s) G
n
[0,1]
=
n\st
signals.
a]
By
'^
,
the strong law of large numbers,
almost surely according to both individuals.
Defining the set
S=
{s
^ S
this observation implies that Pr' (5
for all
sample paths
:
lim„^oo
=
G 5)
'Tn
1 for
/n exists}
{s)
z
=
We
1, 2.
(1)
,
will often state
our results
which equivalently implies that these statements are true
s in 5,
almost surely or with probability
1.
Now, a straightforward apphcation
of the Bayes
rule gives
to-'
^Since our purpose
not assume a
common
is
to
understand whether learning
prior, allowing agents to
justifies the
have differing
beliefs
common
prior assumption,
known.
''Given the definition of r„
the probability distribution Pr' on
(s),
Pr' (S-^-' ")
=
^'^
(£«'")
=
(l-TT')
Pr'
/'
p'"'^) (1
-
p)"-
x
{.4, 1?}
^"(''
f], (p)
dp,
5
is
and
/ (1-p)'-"^-''p"-'-"('VMp)^P
Jo
at each event £*•*"
=
{{9,s')
\s[
=
St for
each
i
<
n}, where s
=
we do
even when the beliefs are commonly
{st}^-^
and
s'
=
{s[]^i.
where Pr'
n
{rn\9)
is
the probabihty of obsendng the signal
St
=
a exactly r„ times out of
signals with respect to the distribution Fg.
The followng lemma
sample paths
s in
provides a useful formula for 0J^ (s)
5 and
lim„^oo
0Ji {s)
for all
also introduces the concept of the asymptotic likelihood ra-
Both the formula and the asymptotic Hkelihood
tio.
=
ratio are crucial for our analyses
throughout the paper.
Lemma
1 Suppose
Assumption
c^^ {p is))
where p
is
=
{s)
lim„^oo
r-n.
{s)
/n,
Then for
1 holds.
^ hm
and
0';,,
\/p
G
is)
all s
=
G S,
^J
(3)
[0, 1],
the asymptotic likelihood ratio.
Proof. See the Appendix.
In equation
a
when
R' (p)
the true state
individual
about
(4),
i
is
is
B
the asymptotic likelihood ratio of observing frequency p of
versus
when
it is
A.
Lenmia
uses this hkelihood ratio and Bayes rule to
1
states that, asymptotically,
compute
6.
In the statements about learning, without loss of generality,
6
=
his posterior beliefs
A.
The two
we suppose that
in reahty
questions of interest for us are:
1.
Asymptotic learning: whether
2.
Asymptotic agreement: whether
Pr' (limn.„>oo
0n
Pr' (lim„._^oo
(5')
\<pl
=
Ij^*
(s)
-
=
.4)
(p^ (s)|
=
=
1
for
O)
=
i
=
1,2.
1 for i
=
1,2.
Notice that both asymptotic learning and agreement are defined in terms of the
ex ante probability assessments of the two individuals. Therefore, asymptotic learning
implies that an individual beheves that he or she will ultimately learn the truth, while
asymptotic agreement imphes that both individuals believe that their assessments
will
eventually converge.^
^We formulate asymptotic learning and agreement in terms of each individual's initial probability
measure so as not to take a position on what the "objective" for "true" probability measure is. Under
Assumption 1, asymptotic learning and agreement occur iff the corresponding limits hold for almost all
long run frequencies p [s] € [0, 1] under Lebesgue measure, which has also an "objective" meaning.
8
Asymptotic Learning and Agreement with
2.2
Pull Identifica-
tion
In this subsection, we provide a number of preliminary results on the conditions under
which there
will
be asymptotic learning and agreement.
These
results
mil be used
as the background for the investigation of the continuity of asymptotic agreement at
Throughout
certainty in the next section.
where Assumption
The foUowng
1
focus on environments
does not hold.
well-known result on asymptotic
result generalizes Savage's (1954)
learning and agreement. Savage's Theorem, which
is
we
this subsection
then stated as Corollary
is
the basis of the argument that Bayesian learning toII push individuals towards
beliefs
and
Let us denote the support of a distribution
priors.
inf(suppF) to be the infiraum of the set suppf
Also
let
(i.e.,
F
1
below,
common
by suppF and define
the largest p such that
F (p) =
0).
"''
=
us define the threshold value
-
log (pb/ (1
(For future reference, this
is
j(?.4))
+ log (p^/
(1
- Pb))
the unique solution to the equation
p^(l— p^)
p\-'{i-pbY-)
(Generalized Asymptotic Learning and Agreement) Define p {pa,Pb)
Theorem
1
as in (5).
Assume
P
i.PA,j,PB,j)
+ Pa,i
for
i^
all
1.
Pr'(lim„^^</);(.s)
2.
W
(lim„_.^
and
that for each 6
=
\d>\ (.s)
-
l|6'
j.
=
i,
Then for
.4)
4)1 (s)|
=
=
pg^,,
—
all
i^
inf(suppFg) G (1/2,
1 For any s
lnn^,{s)
-
{s)
=
limr„
1
-
pB,i 7^
l,-
O)
=
1
1}
and only
if 1
-ps.i
<
P {pa,j,Pb,j)
<
PA,i-
of the following claim.
E S,
n —>oo
-
where p
and
j,
Proof. Both parts of the theorem are a consequence
Claim
1)
(5) /n.
"^
= {'
(0
^fP(^)>P(P-^^^-P^^^
if
p{s)
<
p{pA,.,PBa),
(6)
(Proof of Claim) Let
"
Take any p >
'"'
^
Pr^ {rn\e
=
Jprn
A)
<
p{pA/,,PB,i)- Since 1 -ps,,;
(1
'
_ p)"-" dFX
PA,i,
[l-PB,yp'Bf<fA,{l-PA,f-r
function pP
The
p
—
p.
Then,
suppF^, p e
(1
The
first
{I
(7)
—
p)
~^
continuous and concave in
imphes that there
e (p-e^p
\pA,t,p],rn/ri
- p)-
is
p—
<
(1
and reaches
p,
and p >
paj.
its
maximum
such that
for all
at
p G
+ e),
- pB,r" p^7" < f"
(1
-pf-
'""
< p-
(1
- p)"-^"
(8)
.
inequality in (8) imphes that
< i^-PB,rp%:r-
j {i-pY-p^-^-dF^s
On
>
exists e
(7)
the other hand, the last inequality in
(8) implies
(q)
that
ff-{i-pr-'^dF\> f f-{i-pr-'"dF\>F\{p)f^{i-pr'-,
where the
first
inequahty follows from non-negativity of p'""
(1
— p)"~'"" By
.
(lo)
dividing the
we
left-hand side [right-hand side] of (9) by the left-hand side [right-hand side] of (10),
therefore obtain
*'
•
°-''"<'^"*-^T(?)U-/-(i-P)-'"'" j
Equation
(6) follows
from
in parenthesis in (11)
n
—
>
oo and Tn/n -^
argument (switching
(Part
agent
is
i
1) Since
Therefore,
=
1
SufRciency)
ymptotic agreement.
when Vn/n G
1,
/-^^
—
(r„)
>
(s)
(?!)';,
We
0,
—
e/2,p
and thus
4- e/2],
(pni-s)
when p <
-^
1), (6)
the expression
1
Suppose p{pa,j,Pbj) <
10
—
Pb,i.
PA,i-
1.
p
(.s)
> pA^ >
<
as
The same
O
p{pA.i,PB,i.)-
This implies that Pr' (limn^oo ^n
prove that
—^
implies that conditional on 9
5 and
to the event that s G
(5).
[p
so that the right-hand side converges to
inf(suppF0) e (1/2,
the last inequality follows from
2:
(8),
and B) imphes that
assigns probabihty
(Part
By
smaller than
p.
A
p^,,
(11).
=
A,
p {pA:hPB,i), where
i^)
p{Pa,j,Pb,j)
<
=
1|^
=
-4)
=
1.
PA,i implies as-
Then, conditional on 9
=
A,
(6)
.
implies that
(jP^
p{Pa,j,Pbj)
>
1
-
1
establishes that
(Part
converges to
(s) also
PB/n conditional on
(s)
\(pl
—
4>l
— PB,i < p{Paj,Pbj) <
(s)|
-^
=
6i
^
p{s) e \pA,t,pipAj,PB,j))- But
^
(s)|
-^
0^. (s)
when
Next,
This
0.
sufficiency.
assigns strictly positive probability to the event that
i
-^
(6) implies (j)'^{s)
1
and 0^
Therefore, the beliefs diverge almost surely.
1.
where p {paj^Pbj) <
for the case
0.
Suppose the inequality does not hold, and consider the
rn{s)/n
0^
and
—>
PA,i-
p{pA,j,PB,j)- Then,
—
(s)|
0^
prove that asymptotic agreement imphes the inequality
<
|(^^ (s)
—
B, (pi{s) -^
and proves
case pA,i
that
(s)
\(t)\
We
Necessity)
2:
and therefore
1,
—
1
PB,i is
-^
(s)
0,
so
The argument
analogous and completes the proof of the
theorem.
Theorem
each 9 and
shows that under the
1
i,
assumption" that
"full identification
pe^i
>
1/2 for
asymptotic learning always obtains. Furthermore, asymptotic agreement
depends on the lowest value
of pg to which individual
pe,,
=
i
1,2 assigns positive
probability.
An immediate
corollary
is
Savage's theorem.
Corollary 1 (Savage's Theorem) Assv,me
some
pg
>
1/2,
i.e.,
=
Fg {pg)
1.
Pr'(lim„_.^<(s)
2.
Pr^ (lim„^oo 0n (5)
=
l|e
-
with the
latter.
and Fg
=
=
.4)
=
0' (s)
1
It is useful to spell
1
[p)
that each Fg puis pivbability 1
=
for each p
i
=
1,2,
0)
=
1
I
1
states that
when
1
and Corollary
the individuals
distributions of the signals (and hence they agree
will learn the truth
Then, for each
pg.
l.
out the intuition for Theorem
Corollary
<
on pg for
what those
with experience (almost surely as n
—
>
know
1.
Let us start
the conditional
distributions are), they
oo)
and two individuals
observing the same sequence will necessarily come to agree what the underlying state,
is.
A simple
intuition for this result
is
that the underlying state 9
is
fully identified
6,
from
the limiting frequencies, so that both individuals can infer the underlying state from the
observation of the limiting frequencies of signals.
However, there
is
is
more
to this corollary than this simple intuition.
Each individual
sure that they will be confronted either with a limiting frequency of a signals equal
=
9 =
to Pa, in which case they will conclude that 9
A, or they wall observe a hmiting
frequency of l—pB, and they will conclude that
B; and they attach zero probabihty
11
to the events that they will observe a different asymptotic frequency. "What happens
an individual observes a frequency p of
sample of
The answer
n?
size
signals diff'erent from
pA and
1
- ps
in
to this question will provide the intuition for
the results that we will present in the next section.
Observe that
probabihty under the individual's
=
beliefs at the limit
n
cx5.
this event
However,
for
if
a large
some
of
has zero
n < oo he
will
assign a strictly positive (but small) probability to such a frequency of signals resulting
from sampling
variation. Moreover,
P {Pa,Pb) e
-
samphng
(1
Pb.Pa) given by
it is
above such that when p
(5)
variation that leads to p under 9
one under 6
=
A. Consequently,
1
to the event that
assign probability
1
to 9
=
1 is
9,
and
the sequence of signals.
individual
i
infinitely greater (as
to p
is
B.
each individual
When
variations are.
is
pg^j,
infinitely smaller
p
>
— pB,i.PA,i)-,
with probability
1
that 9
similarly,
close,
The assumption
1/2 in Corohary
and
learn the payoff-relevant
Avill
= A
that 9
1
—
is
when
is
more
likely
under 9
= A
depend only on how large these
beliefs
—
than under 9
—
1,
he presumes that this has resulted
>
oo) the necessary sampling variation
~
A. Conversely,
B.
Consequently, the individual
when p <
p{pA,i^PB,i),
he beheves
B. Wlrether there will be asymptotic agreement then purely
diff'erent
the cutoff values p {pa,i,Pb,i) and p (p.4,2,Pb,2) are.
both individuals mil interpret the limiting frequency of
even when this
1,
the lowest sampling variation that leads
p iPA.i^PB,i) (and as n
depends on whether and how
Wlien they are
9,
and the asymptotic
under 9
beheves with probabihty
>
1.
In particular, similar to the intuition for Corollary
In particular, for each
attained at
will
both himself and the other player to do so before observing
observes a frequency p E {I
=
oo) than the
when p < p{pa,Pb), he
A. Conversely,
from sampling variation, and decides whether frequency p
or under 9
n —^
(p.4,Pb), the individual will asymptotically
the assumption that pg
1) generalizes
also expects
p {pa,Pb), the required
very similar to that of Corollary
sufficient to ensure that asymptotically
state
\s
>
B.
Theorem
intuition for
that inf (suppFj) e (1/2,
is
=
=B
when p > p
assign probabihty
The
straightforward to see that there exists a unique
a frequency to which they
initially
signals, p,
assigned zero probability,
and wiU reach asymptotic agreement.^
The next
corollary highlights a range of conditions other than those in Corollary
that, according to part 2 of
^In contrast,
if
Theorem
1,
1
are sufficient for asymptotic agreement.
these cutoff values were far apart, so that p{pA,i,PB.j) ^ (1 ~ Pb,i^Pa,i), both players
their beliefs would diverge to the extremes and we
would assign positive probability to the event that
would thus have lirn,,, -oo |</'„ {^) — 4>n (*')| "= ^-
12
Corollary 2 (Sufficient Conditions for Asymptotic Agreement) Suppose
Pe^i
=
inf(suppFg) e (1/2,
Then, there
1).
that
asymptotic agreement whenever any one of
is
the following conditions hold:
1.
certainty (with symmetry): each Fg puts probability 1 on
2.
symmetric support: suppF4
3.
common
support: suppFg
Proof. Part
1
= suppF|
of the corollary
assumption, we have p [pa;i~Pb,i)
from part 2 of Theorem
under the
= suppFg
common
is
=
for each
for each
j,
1/2;
6.
2.
Under
s}'iiimetric
support
so that part 2 of the corollary follows
Finally, part 3 of the corollary follows
1.
>
p"
i;
a special case of part
1/2 for each
some
support assumption pIpaj^Pb.j)
=
pipA^i.PB,,)
from the
€
fact that
— PB,i,PA,i)-
(1
Corollary 2 shows that various reasonable conditions ensure asymptotic agreement.
Asymptotic agreement
mon
is
implied, for example, by certainty, symmetric support or com-
support assumptions. In particular, certainty (with symmetry), which corresponds
to both individuals believing that hmiting frequencies have to be p' or
P^ ¥" P^)
is
sufficient for
asymptotic agreement. In
tliis
1
— p'
case, each individual
(but with
is
certain
and therefore believes that the frequency
about what the limiting frequency
will l^e
pected by the other individual
not be reahzed (creating a discrepancy between that
individual's initial belief
will
and observation). Nevertheless, with the same reasoning as
the discussion followng Corollary
1,
Theorem
is
1
sufficient for
and Corollary
in
each individual also believes that the other individ-
ual will ascribe this discrepancy to sampling variation and reach the
himself. This
ex-
same conclusion
as
asymptotic agreement.
2 therefore
show that
results
on asymptotic learning and
agreement are substantially more general than Savage's original theorem. Nevertheless,
these results do rely on the feature that
F^J
(thus implicitly imposing that Assumption
1
(1/2)
=
for
each
i
=
1,2
and each
does not hold). This feature implies that
both individuals attach zero probability to a range of possible models of the world
they are certain that pe cannot be
situations in which this
is
less
9
than 1/2. There are two reasons
—
for considering
not the case. First, the preceding discussion illustrates
assigning zero probability to certain models of the world
is
important;
it
i.e.,
why
enables individ-
uals to ascribe any frequency of signals that are unlikely under these models to sampling
variabiUty. This kind of inference
may be viewed
as
somewhat unreasonable,
since indi-
viduals are reaching very strong conclusions based on events that have vanishingly small
13
probabilities (since sampling variability vanishes as
^
n
cxd).
Second, our motivation of
investigating learning under uncertainty suggests that individuals
(albeit small) probabilities to all possible values of pe.
of
Assumption
1
attach positive
This latter feature
is
the essence
(the "full support" requirement).
and Agreement with
Failure of Asymptotic Learning
2.3
may
Full
Support
We
next impose Assumption
where Fg has
full
1
and show that under the more general circumstances
support, there will be neither asymptotic learning nor asymptotic
agreement.
Theorem
(Lack of Asymptotic Learning and Agreement) Under Assumption
2
(lim„_^
1.
Pr'
2.
Pr* (lim„_oo
(/>;
^
[s)
\<PI,.
(-s)
~
1|^
0n
=
=
.4)
for
1
=
{s)\ t^ O)
i
=
1,2;
whenever
1
n'^
^
=
and Fg
tt^
Fg for each
ee {A,B}.
Proof. Since f's{l-p{s))
Lemma
[p (s))
1, (p]^
note that, by
Lemma
<Pl (pis))
Since
Pr'
vr^ 7^ tt^
{\(t>l (s)
^
=
<iL iPis))
and Fg
-<pI{s)\
Remark 1 The
We can see from
each
1 for
1, for
=
>
any
if
s
and fA{p{s))
s,
establishing the
and only
Fg, this implies that for each s G S,
^0) =
1 for
i
=
assumption that Fg
2
Theorem
2.
Assumption
It is
ymptotic learning
1
is
is
Hence, by
(s) 7^
0^
(s),
and thus
m
1,2.
—
(f)]^
(12)
Fg in this theorem
is
adopted
in Section 4 states a
and
signals,
for simplicity.
mil typically be
more general
version of this
and shows how the assumption
sigTiificantly.
considerably stronger than the
adopted only
it
0.
see the second part,
(12) that even in the absence of this condition, there
Fg can be relaxed
Remark
To
part.
>
^^R' ip{s)) = ^^^' (p(*0)
if
result for the case of multidimensional state
=
first
R'{p{s))
E S,
no asjTuptotic agreement. Theorem 6
that Fg
is finite,
for simplicity.
sufficient (but
It
necessary conditions for
can be verified that
for lack of as-
not necessary) that the measures generated by
14
the distribution functions
F\
and F^
{p)
(1
-p) be
absolutely continuous with respect
to each other. Similarly, for lack of asymptotic agreement,
F\
essary) that the measures generated by
{p),
F^
-p), Fj
(1
absolutely continuous with respect each other. For example,
that Pa
is
sufficient (but
it is
if
(p)
and F^
(1
not nec-
- p)
both individuals believe
and that ps
either 0.3 or 0.7 (with the latter receiving greater probabihty)
also either 0.3 or 0.7 (with the former receiving greater probabihty), then there
neither asymptotic learning nor asymptotic agreement. Throughout
1
both because
we turn
and because
simplifies the notation
individual will
fail
Theorem
1
and imphes
to learn the true state.
The second
2 contrasts with
amount
is
wll be
we use Assumption
a natural assumption
it is
to the anal5^sis of asymptotic agreement as the
Theorem
if
it
be
when
of uncertainty vanishes.
that, with probabihty
each
1,
part of the theorem states that
the individuals' prior behefs about the state differ (but they interpret the signals in
the same way), then their posteriors will eventually disagree, and moreover, they will
both attach probabihty
1
Put
to the event that their beliefs will eventually diverge.
differently, this implies that there
is
"agreement to eventually disagree" between the two
individuals, in the sense that they both believe ex ante that after observing the signals
they
will fail to agree.
Intuitively,
individual
is
when Assumption
1
support feature) holds, an
(in particular, the full
never sure about the exact interpretation of the sequence of signals he
observes and will update his views about pg (the informativeness of the signals) as well
as his views about the underlying state. For example, even
A
in state
than
in state
that the true state
is
B, a very high frequency of a
A, because he
beheved, and they
initially
may
may
will
when
us
how
more
likely
not necessarily convince him
instead be biased towards
is
a.
his prior beliefs
he
Therefore, the indi\'idual
captured by the fact that
in (4) never takes the value zero or infinity. Consequently, as
be determined by
is
infer that the signals are not as reliable as
never becomes certain about the state, which
beliefs will
signal a
shown
R {p) defined
in (3), his posterior
about the state and also by
i?.',
which
tells
the individual updates his beliefs about the informativeness of the signals as he
When two individuals interpret the informativeness of the signals
same way (i.e., B} = B?), the differences in their priors will always be reflected
observes the signals.
in the
in their posteriors.
In contrast,
(i.e., if i
if
an individual were certain about the informativeness of the signals
were sure that pg
=
p'g
for
some
p'g
15
>
1
12) as in
Theorem
1
and Corollaiy
2,
then he would
neA^er question the inforraativeness of the signals,
frequency of a converges to a value different from
p'^
or
such discrepancies as resulting from sampling variation.
=
asymptotic agreement when p\
The
p)^.
full
1
-
even when the limiting
pg, and would interpret
This would be sufficient for
support assumption in Assumption
1
prevents this type of reasoning and ensures asymptotic disagreement.
Main Results
3
In this section, we present our main results concerning the potential discontinuity of
asymptotic agreement at certainty. More precisely, we investigate whether as the amount
of uncertainty about the interpretation of the signals disappears and
we
recover the
standard model of learning under certainty, the amount of asymptotic disagreement
vanishes continuously.
We
will
show that
this
is
not the case, so that one can perturb
the standard model of learning under certainty sightly and obtain a model in which
there
is
is
substantial asymptotic disagreement.
We
first
show that asymptotic agreement
discontinuous at certainty in every model, including the canonical model of learning
under certainty, where both individuals share the same
(Theorem
signal distributions
We
3).
beliefs regarding the conditional
then restrict our perturbations to a class that
embodies strong continuity and uniform convergence assumptions. Within
perturbations,
we characterize the conditions under which asymptotic agreement
continuous at certainty (Theorem
For any p 6
i.e.,
5p (p)
Let
=
1
[0, 1],
if
p
write
> p and
S.^
for the
Sp (p)
Dirac distribution that puts probability
=
hm^l^e^miP)
m -^
cx),
is
-
asymptotic agreement under
<^
S^i
6^,
for
each
(i,
^) as
to a world of asymptotic agreement.
0j,o,n7
Evidently, as {Fg„,
}
for the
Sp,J.
Throughout
= p;
We
S^,,
,
m—
>
oo:
(13)
it is
(as in Corollaries 1
impHcitly assumed
and
2).
Therefore, as
we converge
wTite Pi'"' for the ex ante probabihty under
asymptotic posterior belief that 6
converges to
on p
ifp<2->^,.
uncertainty about the interpretation of the signals disappears and
{F\ ^, Fg „) and
1
denote an arbitrary sequence of subjective
simply say that {Fg^} converges to
that there
be
otherwise.
{i^(jm}m6N,!:sA',ee0 {{Fg.,„} for short)
will
will
5).
probability distributions converging to a Dirac distribution
(We
this class of
=A
under iF\^^,
-^e.m)-
each individual becomes increasingly convinced
16
.
that he will learn the true state, so that learning
formally, for
all
e
>
0,
hm
Pv''^{4>'^^,,>l-e\e
= A)=l.
This imphes that when a model of learning under certainty
from
full
More
continuous at certainty.
is
is
perturbed, deviations
learning will be small and each individual will attach a probability arbitrarily
close to 1 that he will eventually learn the payoff-relevant state variable
6.
We
next
define the continuity of asymptotic agreement at certainty.
Definition 1 For any given family {F^^}, we
continuous at certainty under
{Fg^^,}, if for all e
>
limPr'>'"(|(/)^,,„.-0^,„,|<5)
We
agreement
say that asymptotic
is
asymptotic agreement
sa,y that
and for each
=
=
1,2,
l.
continuous at certainty at {Pa^Pb^P%P%)
continuous at certainty under every family {-Pg^} converging to
if it is
z
is
(5p.
Thus, continuity at certainty requires that as the family of subjective probabihty
distributions converge to a Dirac distribution (at which there
is
asymptotic agreement),
the ex ante probability that both individuals assign to the event that they will agree
asymptotically becomes arbitrarily close to
tinuous at certainty at {Pa^Pb>p'a-p'b)
and
e
>
i^
1.
Hence, asymptotic agreement
there exists a family
is
discon-
{Fg^} converging
to 5 pi
such that
hm
— Pr'>"(|0L,..-<*L,^,|>£)>O
771.
for
i
=
1, 2.
We
Definition 2
'CxD
wll next define a stronger notion
We
say that asymptotic
certainty under {Fg^}
if there exists £
of discontinuity.
agreement
>
is
strongly discontinuous at
such thai
lim Pr'-"'(|0^,,„,-0^,„|>e)=l
for
i
=
1,2.
We
say that asymptotic
certainty at (p^ pg
,
,
p^^
,
p|)
family {F^^} converging to
if it is
agreement
is
strongly discontinuous at
strongly discontinuous at certainty under
some
6.^^
Strong discontinuity requires that even as we approach the world of learning under certainty, asymptotic agreement will
fail
according to both individuals.
17
with probability approximately equal to
1
Discontinuity of Asymptotic Agreement
3.1
The next theorem estabUshes
the strong discontinuity of asymptotic agreement at cer-
tainty.
Theorem
ment
3 (Strong Discontinuity of Asymptotic Agreement) Asymptotic agree-
strongly discontinuous at every {Pa^P^b^ Palp's)
is
Moreover,
if tt^
^
tt'
then there exist {Fg} converging to
,
-
\<plc,m [P ('S))
The
each
proof of this theorem
the hmiting world
9,
Theorem
in Savage's
of observing signal s
9
=B
a
p^ > 1/2
1
the state
if
on
= A and
9
is
pg). Therefore, this
close to this world of certainty, the asymptotic gap in beliefs
condition p^ G (1/2,
E
S.
Note that when pi
=
pj
—
pe for
not needed (see
1) is
Theorem
I
— ps
the state
if
is
theorem establishes strong
discontinuity at certainty for the canonical learning model; even
The
s
such that
both individuals are certain that the probability
1):
each Fg puts probabihty
(i.e.,
and
all {d,i).
the canonical learning model (under certainty) described
is
is
Z>
and
5^1
allmGN
for
provided below.
is
(Corollary
=
> Z
<^L,m (P (^0)1
e (1/2,1) for
p'g
'^''i'ih
is
when we
are arbitrarily
bounded away from
The proof
7 below).
is
zero.
based on
the following example.
Excunple 1 For some small
1
—
e,
Pe
is
in a
A G
e,
(0, 1),
each individual
A-neighborhood of some pl >
More
signals are not informative.
(1
+
precisely, for pg
i
thinks that with probability
A) /2, but with probabihty
>
(1
+
A) /2
the
e,
and A < iPl—pj], we
have
f f^)^
'^^^
for
each 6 and
i.
^
Now, by
^'^^^'^^^^
f
/
\
+
(1
-
e)
'fP e (Pe
otherwise
/^
e
(4),
^
—
'
- V2,P^ +
A/2)
^
the asymptotic likelihood ratio
'
is
ifp{s)ED\^{p\-X/2^p\+\/2)
z/>(.) G
Z?i,
^
(1 -p'i,
-A/2,1- Pi, +
A/2)
otherwise.
This and other relevant functions are plotted
likelihood ratio
down
to
Lemma
1
1,
/?' {[> (.s)) is 1
wlien p (s)
is
in
(s) will also
1
for e
—
>
0,
A
small, takes a very high value at
afterwards, becomes nearly zero around
^^
Figure
p'_^,
1
is
The
0.
— Pg,
and then jumps back to
be non-monotone: when p[s)
18
^
1.
goes
By
small, the signals are not
^'
-^-.
n'
7I--71'
1-71=
71'
P
\-p'
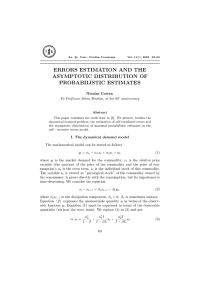
Figure
\4L
1:
The
- 0LI
as
three panels show, respectively, the approximate values of
^
e
informative, thus
signals
^^
P
0, for f)\
(/)J^
(s) is
= p^ =
(p),
(j!)^,
the same as the prior,
In contrast, around 1
tt'.
state
become uninformative again and
is
B, thus
0'J^ (s)
0!^ (s) goes back to
—
=
tt*.
p^, the
0.
become uninformative and
when p(5)
is
around
1
— pg
0'^^ (s)
falls
back to
After
Around
p^, the signals are again informative, but this time favoring state A, so (p^ (s)
Finally, signals again
and
p'\
become very informative suggesting that the
this point, the signals
/?,'
=
1.
Intuitively,
tt''.
or p'4, the individual assigns very high probabiUty to the
true state, but outside of this region, he sticks to his prior, concluding that the signals
are not informative.
The first important
observation
range of limiting frequencies, as
1
to the event that he will learn
Theorem
1,
as
e
-^
and A —^
frequencies will be either
1
— pg
is
in a region
and A
This
6.
is
is
equal to the prior for a large
each individual attaches probability
>
because as illustrated by the discussion after
each individual becomes convinced that the Umiting
is
considerably weaker than as3aTiptotic agreement.
also understands that since
where he learns that
signals are uninformative
—
0^
or p\.
However, asymptotic learning
Each individual
-^
f
0,
that even though
is
9
=
and adhere to
A <
|pj
—
Pq|,
when the long-run frequency
A, the other individual will conclude that the
his prior belief.
Consequently, he expects the
posterior beliefs of the other individual to be always far from his.
e
-^
and A -^
0,
each individual beheves that he
that the other individual will
fail
differently, as
will learn the value of 9
to learn, thus attaches probability
they disagree. This can be seen from the third panel of Figure
19
Put
1;
1
himself but
to the event that
at each
sample path
one of the individuals
in S, at least
and the
will fail to learn,
between their
difference
limiting posteriors will be uniformly higher than the following "objective"
= min
z
When
=
TT^
1/3 and
=
tt^
{7r\
tt^, 1
—
bound
2/3, this
—
7r\ 1
tt^,
—
\Tr'^
7r"|}
.
equal to 1/3.
is
In fact, the belief of
each individual regarding potential disagreement can be greater than
vidual beMeves that he will learn but the other individual will
quently, for each
min{7r\7r^,
—
1
Pr' (|(^^ (s)
-i,
7r\ 1
-
and Pg
=
pI
0^
<
1x^/2 for
(s)
learning of
6.
~
where
)^
By
i).
m -^ 00.
G
(s)
In
e
>
Z)
1
to do so.
fail
where as
e,
Example
is
for each
1,
such that
1
—
<
(^^ (s)
=
e
take
7/7.,
<
A
(1
Z=
D\ U D'g. But
z/2
Pr''-'"
>
By
0.
{p (s)
£
—
5p.
choice of
D\ U
e
=
e
—
Conse-
Z —
0,
»
D'^)
,
=
e,
A
pj for 6
=
e/m,,
7r-')/2 for
Such
e.
construction, each Fq'^' converges to
proof, pick
>
only consider the case p]
p{s) E I?e whenever
To complete the
whenever p
We
3.
other cases are identical.
>
qr^ {s)\
-
each indi-
this;
z
>
=
This "subjective" bound can be as high as 1/2.
tt^}.
Proof of Theorem
-
bound
e
and
-
p],
A, B; the
=
p{s) e
exists (by
pi
+
A,
D\ and
asymptotic
— p1\ > A for each
(s) — ^L.m i-^)\ > ^
\p]j
|0^,„
e (1
=
A),
which goes to
1
as
Therefore,
hm Pr^''"{Ul^„,-ct>lJ>Z) =
l.
(15)
TD—>00
To prove the
last
Z —
statement in the theorem, pick
Theorem
In the example (and thus in the proof of
and the asymptotic
beliefs
(j!)'^
(s)
are
non-monotone
3),
z/2,
which
is
positive
the likelihood ratio
in the frequency p{s).
/?'
when
(p(s))
This
is
a
natural outcome of uncertainty on conditional signal distributions (see the discussion at
When
the end of Section 2 and Figure 2 below).
uncertainty
is
both of them
will learn
Z >
monotone and the amount
of
the true state and consequently asymptotic disagreement will be
impose the monotone likelihood
For any
is
small, at each state one of the individuals assigns high probability that
small. Nevertheless, asymptotic agreement
Theorem 4
R
is still
discontinuous at uncertainty
ratio property. This
is
when we
sho^vn in the next theorem.
(Discontinuity of Asymptotic Agreement under Monotonicity)
p\,p''g
>
1/2,
i
G {1,2}, mid
7r\
tt'^
such that:
20
G
(0,1).
there exist a family {Fg^^}
and
B} and
1.
for each 9 G {A,
2.
the likelihood ratio
3.
for each
R^
=
i
1,2,
Fg^
converges to
S^i
;
nonincreasing in p for each
{p) is
and
i
rn,
and
i,
lim
Pr'^''"(kU-Cn.|>^)>0.
(16)
Proof. See the Appendix.
The monotonicity
3,
of the
so that the hmit in (16)
hkehhood
ratio has
no longer equal to
is
discontinuous at certainty, but not strongty
Note that
weakened the conclusion
1,
What
{^9m}
^^^'^ ^'^^
important
is
is
and characterize the conditions
This
is
not crucial for the
ensure continuity of the
is
We next
pointwise).
(as well as additional strong continuity
for discontinuity of
impose
assumptions)
asymptotic agreement at certainty.
Agreement and Disagreement with Uniform Convergence
3.2
we consider a
In this subsection,
Dirac distribution
5pr for
some
p'
G
class of famihes [Fg-^] converging
(1/2, 1)
We
start our analysis
determining density function
is
strictly positive
there exists x
<
tail
is
discontinuity
properties of {Fg^}.
by defining the family {Fg.^}, with a corresponding family
of subjective probabihty density functions [fl^,]-
/
uniformly to the
and show that whether there
of asymptotic agreement at certainty depends on the
(ii)
to the discontinuity of
that the likelihood ratios under families
converge uniformly (instead, convergence
a uniform convergence assumption
(i)
ratios.
Fg^ would
however, since smooth approximations to
likelihood ratios as well.
is
so.
asymptotic agreement induce discontinuous likehhood
results,
Theorem
so that asymptotic agreement
Theorems 3 and 4 the famihes {F^^,} leading
in
of
/.
We
is
parameterized by a
impose the following conditions on
and symmetric around
oo such that /
The family
(.x) is
/:
zero;
decreasing for
all
x
>
x\
(iii)
^,(x,y)= lim
m^oo
exists in
[0,
oo] at
ah {x.y) G M+.
21
4^4
/ [my)
(17)
Conditions
and
(i)
(ii)
are natural
and serve to simplify the notation. Condition
(iii)
introduces the function R{i:,y), which will arise naturally in the study of asymptotic
agreement and has a natural meaning in asymptotic
statistics (see Definitions 1
and
2
below).
In order to vary the
[x
—
/m, which
y)
scale
amount
down
we
of uncertainty,
consider mappings of the form x
the real line around y by the factor 1/m.
subjective densities for individuals' beliefs about pa and pe, {flm}^
by / and the transformation x
^-^
[x
— p')
we
/m.'" In particular,
^^'^^^
i-^-
The family
of
be determined
consider the following
family of densities
= e{m)f[m{p-p^))
fl,^,{:p)
for each 6
that
/g^
and
i
where d (m)
=
1/ J^
/'
[m {p —
p'))
a proper probability density function on
is
subjective densities, the uncertainty about pa
to the Dirac distribution
dpi
as rn
^
dp
[0, 1]
a correction factor to ensure
each m. In this family of
for
down by
scaled
is
is
(18)
oo, so that individual
l/'m,
and
fg
^ converges
becomes sure about the
i
informativeness of the signals in the limit.
The next theorem
characterizes the class of determining functions / for which the
resulting family of the subjective densities {J}
ment
as the
Theorem
p"
>
amount
the family {F^.m} defined in (18) for
1/2 and f, satisfying conditions (i)-(m) above.
formly converges
1.
of uncertainty vanishes.
(Characterization) Consider
5
leads to approximate asymptotic agree-
,^„}
If
R{p^
to
R{x,y) over a neighborhood of
+ p^ —
l,\p^
~ p'^l) =
+ p'^ —
l,\p^
— p'^l)
Assume
that
—
1, \p^
{p^ -|-p^
f{mx)/f{my)
— ]5^|).
some
uni-
0;
ihen agreement
is
continuous at certainty under
7^ 0,
then agreement
is
strongly discontinuous at cer-
in, J-
.
2.
If
R{p^
tainty
under {Fg.^}.
Proof. Both parts
Claim
of the
2 Iim.^,_oo (0^.,™ if)
(where
(p'oom
i'P')
"
^o..n,. (p'))
=
if
and only
denotes beliefs evaluated under sample
^"This formulation assumes that
do not introduce
theorem are proved using the following claim.
p'^ a.ncl
Pg
arc cqu.il.
Wc
can easily assume these to be
this generality here to simplify the exposition.
in the context of the
more general model with multiple
22
R {f + p^ - h\p' - p^\) =
paths with p = f ).
if
states
Theorem
different,
but
8 allows for such differences
and multiple
signals.
-
(Proof of Claim) Let
be the asymptotic likelihood ratio as defined in
i?^, (p)
One can
associated with subjective density /g^.
Hence, by
By
(12), lim,„._>oo
(0^,m
-
iP')
easily check that
=
(P^ocm iP'))
and only
if
Rm
(p')
hm„,^«,i?4
(p^)
limm^oo
if
(4)
=
=
0.
0.
definition,
hm
Rl„ [p
m^oo
=
)
hm
— - ——
m-»c»
——
—p))
j['ni[p
= R{l~p'-^f.,f-f)
where the
Rm
establishes that hm^^^oo
and only
if
R (p^ + p^ -
(Proof of Part
0.
We
By Lemma
f
exists
is)
\<P'
there exists
1,
>
e
-
>
e'
(i),
symmetry
the
(and thus hm„j_oo
-p^\) =0.
1) Talce any
hm
=
(p')
1, \p^
show that there
will
Pr'
There
by condition
last equality follows
and
G
rfi.
N
This
of the function /.
(p')
{4>'oo,m.
-
4>io,m (p'))
=
0)
if
D
>
(5
0,
and assume that
^ (p^ + p^ —
1, |p^
— p^|) =
such that
4>lm {s)\>e)
such that
0^ .„
<6
(Vm >m,i =
{p (s))
>
1
—
1, 2).
whenever
f
i?'
(p (s))
<
e'.
also exists xq such that
Pr^ (p (s)
-
G {f
+ xo/m)
Xo/m.,p'
\0
=
A)
= f
°
f
(x)
dx >
1
-
5.
(19)
J ~X0
Let K
(see
(xo
=
(ii)
+ xi)
min-cg[_.CQ^,;(,]
/
(x)
>
Since / monotonically decreases to zero in the tails
0.
above), there exists Xi such that / (x)
—
1)
>
0.
+p'|
>
Xi/rn,
I (2p'
have |p(5)
—
1
Then,
for
any
m
<
e'n
> mi and
Again, by
i?4 (p (s))
<
all
ni
> mi and
Lemma
e".
Now,
for
hm
p
G
(s)
(p'
there exists e"
1,
(s)
G
(p'
—
|x|
>
Let
\xi\.
xq/tii.p'
mi =
+ Xo/m), we
and hence
/(m(p(5)-p'))
Therefore, for
p
whenever
each p
—
Xo/m^p''
>
K
+ Xo/m.), we
have that
such that <J^m, (p(s))
>
1
—
e
whenever
(,s),
/?4(p(,))
= ^(p(,s)+p'-l,|p(5)-]y|).
23
(21)
Moreover, by the uniform convergence assumption, there exists
^ (/o(s)
uniformly converges to
—
+it>'
— p'
|p(s)
1,
I)
on
(p'
—
>
r/
such that i?^ (p
+
ry,p'
(s))
and
r/)
R{p{s)+p=-l,\p{s)-^y\) <e'72
—
for each p{s) in (p'
is
continuous at
it
takes the value
T],p'^
+p^ —
(p^
+
Moreover, uniform convergence also implies that
ri).
1, [p^
— p^\)
(and
by
hj^pothesis,
oo such that for aU m-
> m2 and
in this part of the proof,
m2 <
Hence, there exists
0).
R
p(s) e (p'-r/,p' +77),
i?4,(p(.s))
Therefore, for
all
m
>
7712
<R{p{s)+fP - l^\p{s)-jV\)+e"/2 <
and p
{s)
£
[ff
—
+ 7/), we
i],p'
e".
have
C,,Jp(s))>l-e.
Set
m=
ma.x{mi,m.2,ri/xo}. Then, by (20) and (22), for any
{p'-Xo/m,f +
that Pr^
B,
(22)
(|(/.j,„,„
we have
Xo/Tn),
(p(5))
-
this establishes that
(Proof of Part
2)
<
<^i,,„ (p(s))|
Pr''
(10'^^ (p
We
will find
=
eie-
>
<
(tL.rn {p (s))\
/I)
- (^ „
(s))
f
-
(P (s))
\4'';^jn
>
1
-
(p (s))
By
<5.
|
<
e)
777.
1
>
such that for each 5
fh
and p{s) e
Then, (19) implies
e.
symmetry
the
>
>
0,
5 for
of
m>
A
and
tti.
eN
there exists fh
such that
Pr' ( lim
Since lim^^o,
e
=
(1
1 to
—
i?^,,
|(^,;,,,„
-
0^
>
(s)
e)
>
1
-
J
(V7T7
>
777,,
^
=
1, 2).
I
{f)
hmm,--^oo 0io
(.s)
m
= R{p^+p^~
\f
1,
- f~\) >
(P')) /-^ ^'^^ ^^"^ similar
0,
linv^.^ ,^^_„ (f)
arguments to those
in the
<
1.
We
set
proof of Part
obtain the desired conclusion.
The main assumption
in
Theorem
5
is
that the likelihood ratios
uniformly to a Hmiting likehhood ratio, given by R}^
In
what
/?'„
follows,
"noise vanishes uniformly" as a shorthand for the statement that the
/?^(p(s)) converges uniformly to the limiting likelihood
complete characterization of the conditions
ratio.
for the continuity of
[pis)) converge
we say that
hkehhood
Theorem
ratio
5 provides a
asymptotic agreement at
certainty under this uniform convergence assumption. In particular, this theorem shows
that even
(
when
the likelihood ratios converge uniformly, asymptotic agreement
^^Note that the limiting hkclihood ratio
) model without uncertainty.
ft is
may
fail.
not related to the likelihood ratio that applies in the
"limiting"
24
In contrast Corollary 2 shows that that there will always be asymptotic agreement in
the limit.
The theorem
provides a simple condition on the
of the distribution
tail
/ that de-
termines whether the asymptotic difference between the posteriors will be small as the
amount
of uncertainty concerning the conditional distribution of signals vanishes "uni-
formly". This condition can be expressed
R{x,y)=
as:
(^ =
lim
m.^oo f
where x
=
p^
+
-
p'^
>
1
|p^
— p^| =
(23)
[my]
The theorem shows
y.
that
if
this condition
is
then as uncertainty about the informativeness of the signals disappears the
satisfied,
difference
between the posteriors
that condition (23)
is
of the
two individuals
symmetric and does not depend on
Intuitively, condition (23)
other individual will learn.
distributions vanishes,
become neghgible. Notice
will
i.
related to the beliefs of one individual on whether the
is
As the amount
we always have
of uncertainty concerning the conditional
that lim„,^oo
believes that he will learn the value of
/?.'„
with probability
(p')
1.
=
0,
so that each agent
Asymptotic agreement
(or
lack thereof) depends on whether he also believes the other individual mil learn the
value of
9.
When R{x,y) =
0,
an individual who expects a limiting frequency of p^ in
the asymptotic distribution will
p^.
Therefore, individual
1,
still
who
learn the true state
p^
0,
individual
and thus expects to learn
the limiting frequency
is
almost certain that the limiting frequency will be
is
p^, still believes that individual 2 will reach the
when R{x,y) ^
when
1 is still
same
inference as himself. In contrast,
certain that Umiting frequency of signals will be
himself. However, he understands that,
when
R {x, y) ^
0,
an individual who expects a limiting frequency of p^
will fail to learn the true state
when
almost certain that the limiting
limiting frequency
frequency wll be
fy"
happens to be
(or 1
—
p^),
p^
Since he
.
he expects the other agent not to learn the truth and
them
thus he expects the disagreement between
The theorem
exploits this result
their beliefs will disappear
to asymptotic disagreement
when
1
of
R
to
show that the individuals
to the event that the asymptotic difference
when
(23) holds,
(23) fails to hold.
beliefs as uncertainty vanishes "uniformly" are
a condition on the
to persist asymptotically.
and the continuity
attach probability arbitrarily close to
between
is
tail of /.
25
and they attach probability
Thus the behavior
1
of asj^mptotic
completely determined by condition (23),
.
When
Whether
>
y
(i.e.,
when
varying (thick)
a familiar condition in statistics.
is
(thin) or regiilarly-
tails:
A
Definition 3
p^), condition (23)
depends on whether / has rapidly-varying
satisfied
it is
^
p^
density function f has regularly- varying tails
if it
has unbounded sup-
port and satisfies
Hm
4r^ = ^(^) e K
m-too j (m)
for any x
The
>
0.
condition in Definition 3 that
H (x)
the functional equation
a G
i.e.,
H{x)
=
in the limit, the function
H {)
must be a solution
=
H{x)H[y)
it
H{xy), which
is
x~"
only possible
uniformly for x in any compact subset of
a density / has regularly-varying
(in particular, the
R
but nevertheless
if
for
a €
H{x)
=
(0, oo).
x~"
to
for
Moreover, Seneta (1976) shows that the convergence in Definition 3 holds
(0, oo).^^
locally uniformly,
if
relatively weak,
is
implies that
has important implications. In particular,
This follows from the fact that
M
G
defined in (17)
tails,
This imphes that
then the assumptions imposed in Theorem 5
uniform convergence assumption) are
is
(0, oo).
In fact, in this case,
satisfied.
given by
R{x, y)
.y,
and
varying
f
tails
behave approximately
with regularly-varjing
(x)
As
everywhere continuous.
is
varying function
£
this expression suggests, densities with regularlylike
power functions
in the tails; indeed
=
can be written as f{x)
tails
(with \m\n^^, C{rnx) / C {in)
—
1).
a density
C{x)x"°' for some slowly-
Many common
distributions,
including the Pareto, log-normal, and t-distributions, have regularly-varying densities.
When
We
/ has regularly varying
tails,
>
R{x,y)
0,
and condition
(23)
cannot be
also define:
Definition 4
A
density function f has rapidly- varying tails if
fimx)
hm ^ip^ =
=
"-^°° ^("^)
^^To see
this,
1
note that since hm„i_oc if{'nix)/f{rn))
y
f f{^T^"''y)\
hm
Hui[xy) = -rhm
-> / ?n J = '"-=c=
— oc
\
,.
.
-in
See de
Haan
if
x>l
1
./
X
oo
if
x<l
(
.x-°°
(1970) or Feller (1971).
26
= H (x)
=
,/
my
satisfies
1
e R, we have
Krnxy) f{jny)\
f -—
V
it
f{m)J
=
H [x)\„/
H (y)
^
satisfied.
>
for any x
As
0.
in Definition 3, the
above convergence holds locally uniformly (uniformly
over any compact subset that excludes
tails
1).
Examples
include the exponential and the normal densities.
R{x,y)
=
=
{x/y)~°°
The next
0,
and condition
(23)
is
in
x
of densities with rapidly- varying
When
/ has rapidly varying
tails
satisfied.
proposition formally states that under the assumptions that noise vanishes
uniformly and set p^
7^ p^,
whether agreement
is
continuous depends on whether the
family of subjective densities converging to "certainty" has regularly or rapidly-varying
tails:
Proposition
(Tail Properties
1
form Convergence)
p^
^f.
and Asymptotic Disagreement Under Uni-
Suppose that the conditions in Theorem 5 are
satisfied
and
that
Then,
1.
If
f has regularly-varying
2.
If
f has rapidly-varying
tails,
tails,
then agreement
then agreement
is
is
continuous at certainty under
strongly discontinuous at certainty
under [Fl^].
Proof. Wlien / has regularly or rapidly varying
tion
tails,
uniform convergence assump-
and the proposition follows from Definitions 3 and 4 and from Theorem
is satisfied,
5.
Returning to the intuition above, Proposition
it
clear that the failure of asymptotic agreement,
converges to
R
uniformly,
limiting frequencies,
i.e.,
is
p^
^
p^, together
when confronted with a
given there, this
is
and the previous
definitions
under the assumption that
make
i?.^ [p]
related to disagreement between the two individuals about
with sufficiently thick
probability distribution so that an individual
certainty
1
sufficient for
who
tails of
the subjective
expects p^ should have sufficient un-
limiting frequency of p^
.
Along the
lines of
both individuals to believe that they
value of 6 themselves, but that the other individual will
fail
to
do
the intuition
will learn the true
so.
Rapidly- varying
tails
imply that individuals become relatively certain of their model of the world and
thus
when
individual
will interpret this as
i
observes a limiting frequency p close
to,
but different from
p',
he
being driven by sampling variation and attach a high probability
27
to 9
=
A. This will guarantee asymptotic agreement between the two individuals. In
contrast, with regularly-varying tails, even under the uniform convergence assumptions,
limiting frequencies different from p' will be interpreted not as sampling variation, but as
=
potential evidence for 9
B, preventing asymptotic agreement. The following example
provides a simple illustration of part
Example
of Proposition
1.
2 Let / be the Pareto distribution and n^
=
1
=
tt'^
1/2.
The
likelihood ratio
is
and the asymptotic probability of
^i
for all
777..
varying
6*
=
ipis)-p'
fnf.\\
(These expressions hold
tails.)
As
y4 is
in the limit in —> cx)
illustrated in Figure 2, in this case ^J^jm
=
magnitude of asymptotic disagreement, consider p{s)
is
under any / with regularly-
approximately
and
1,
(pio
m
In that case, ^J^sm (pi^))
ff.
+ y^°).
approximately y~^/ (x'"
^^
iP i^))
monotone. To see the
i^ ^'^^^
Hence, both
individuals believe that the difference between their asymptotic posteriors will be
This asymptotic difference
sponds to the difference
likely.
^
to zero as y
The
last
(i.e.,
R
is
in the
=
\p^
— p~\, which
asymptotic difference
y
>
0.
that
R
is
example
continuous. This
is
when
in fact generally true
is
whenever
\p^
e
— P'\ <
A.
Pr'
lim
f
>
converge
and S >
W „ - 0I „
noise vanishes
explored in the next proposition.
continuous on the set
Then for every
will
fp-).
Proposition 2 (Limits to Asymptotic Disagreement) In Theorem
assume
corre-
views on which frequencies of signals are most
this expression that this
as p^ -^
statement
uniformly and
increasing with the difference y
in the individuals'
from
It is also clear
is
0,
>
D —
{{x,y)
—
|
there exist A
e)
<
I
28
f5
1
>
(Vm >
<
<
2:
and
7T7,, 7
1,
m
=
|7/|
5,
<
in addition,
y} for some
G (0,oo) such
1,2).
that
Figure
lini„_oo 0n
2:
(^')
To prove
Proof.
this proposition,
and use the notation
R[x,Qi)
=
whenever
.x,
— p^| <
|p^
there exists A
jfP
—
1, |p (5)
R
>
is
— j^l)
on
77
(p''
>
—
such
tliat R{f?-
p^.
sucli that
?7,p'
+
Tj)
>,p'
(s) [a
of Part
1
of
+fP'
Tlren,
—
3/4.
Theorem
continuous on the compact set
Fix any such p^ and
A.
gence assumption, there exists
R {p (s) +
we modify the proof
Since
in that proof.
each
for
Pareto distribution as a function of p
^*^i"
\,\f?-—p^\)
5
D
and
<
e"/4
by the uniform conver-
Rl^{p{s)) uniformly converges to
and
R{p{s)+jP-l,\p{s)-f\)<e"/2
for
in
each p
(s) in (p'
Theorem
—
ry,p''
+
?/).
The
rest of the proof is identical to the proof of
Part
1
5.
This proposition implies that
in the case
where noise vanishes uniformly and the
individuals are almost certain about the informativeness of signals, any significant dif-
ference in their asymptotic beliefs
regarding the signal distribution
when
p^
=
p"-,
must be due
— that
we must have R{x,y)
is,
=
\p^
0,
to differences in their subjective densities
—
p~\
cannot be too small. In particular,
and thus, from Theorem
5,
there will be
=
p^
For example. Corollary 2 established that under certainty there
is
convergence to asymptotic agreement. Notably, however, the requirement that p^
is
rather strong.
asymptotic agreement
for all
In closing this section,
let
p\p^ >
1/2.
us reiterate that the key assumption in Proposition 2
is
that
i?^ (p) uniformly converges to a continuous limiting likelihood ratio R. In contrast, recall
that
Theorem
3 establishes that a slight uncertainty
disagreement with nearly probability
1
even when p^
29
may
lead to substantial asymptotic
= p^ The
crucial difference
is
that
.
in
Theorem
hkehhood
3 the
ratios converge to a continuous
hmiting hkehhood function
pointwise, but not umfoTinly.
4
Generalizations
The previous
two
K
generalize to an environment with
this section are contained in the
the analog of Theorem
We
the results from the previous two sections
Appendix and
K signal values.
K
and L >
2 states
All the proofs for
signals.
on space, we do not provide
to economize
=
{^i,
...,
.4^-} is a set
a generic element of the set by Ak-
refer to
L >
>
an environment with two states and
1
G 9, where
Suppose
results in
we show that
In this section,
signals.
main
section provided our
As
before, define s
=
= #{t <
signal
Sj
be the number of times the
Similarty, let
{sj^j, and
rvj (s)
=
n\st
=
out of
ai
K>
containing
each
for
2 distinct elements.
E
St
/
=
{cii,
1,
...,
...,ai},
L, let
ai]
n
first
Once
signals.
again, the
strong law of large numbers implies that, according to both individuals, for each
almost surely converges to some Pi{s) e
1,...,L, rn,i{s)/n
Define p{.s)
1.
{
p
=
{pi,.
.
.
,pl)
6
S=
With analogy
A (L)
G
{s
as in usual models,
frequencies p0
:
^,^1
pi
lim„_^oo
=
i
^n,/ [s)
=
assigns to ^
a;
when
=
and
1 [,
to the two-state-two-signal
of observing signal s
we
:
£ S
probabihty individual
to before,
1]^"'
[0,
=
{pi{s)
let
the set
as the vector p{s)
/n
.4/^,
tt'
the true state
immediate generalizations
,
S
=
is 9.
of
/
=
1,
zero
and
A (L) =
where
{n\, ...,tt\^),
and
L}
...,
tt).
pej,
(24)
.
>
be
be the prior
tlie
frequency
players are certain about pe/s
Theorems
1
and
1
apply.
With analogy
define Fg as the joint subjective probability distribution of conditional
=
{pg^i,
,Pe,L) according
to individual
?'.
Since our focus
under uncertainty, we impose an assumption similar to Assumption
Assumption
=
=
be
in Section 2, let
^^''llen
/
with Y^i^iPiis)
[0,1]
...,pj^{s)),
exists for each
model
with
2 For each
i
and
finite density fl over
9,
the distribution Fg over
A(L) has
is
learning
1.
a continuous, non-
A(L).
This assumption can be weakened along the
30
lines discussed in
Remark
2 above.
We
also define
probabihty that 9
0^, „ {s)
= Ak
=
Pr* {6
= Ak
\
=
{sJjLo) for each k
1,
,..,
/C as the posterior
after observing the sequence of signals {sJ"^q,
and
n —»oo
Given
now
this structure,
it is
straightforward to generalize the results in Section
define the transformation T^
:
M^'
— R^~\
2.
Let us
such that
>
TUx)=(jj-;k'e{l,...,K}\k
Here T^
(x)
is
taken as a column vector. This transformation will play a useful role in the
theorems and the proofs. In particular,
TT*
transformation will be applied to the vector
this
of priors to determine the ratio of priors assigned the different states by individual
Let us also define the norm
The next lemma
Lemma
||.t||
generalizes
= max;
Lemma
1
x
for
|.x-;|
=
(xi,
.
,
.
.
i.
xl) G M^.
(proof omitted).
2 Suppose Assumption 2 holds. Then for
all s
E S,
1
'^U(p('^))1
Our
first
theorem
+
in this section parallels
Theorem
tion 2 there will be lack of asymptotic learning,
2
and shows that under Assump-
and under a
relatively
weak additional
condition, there will also asymptotic disagreement.
Theorem
6 (Generalized Lack of Asymptotic Learning
pose Assumption 2 holds for
2.
W (K^
0)
=
{p{s))
and F^
The additional
0)
=
0,
=
i
- ^l^
—
1,2,
then for each k
{p{s))\ 7^ 0)
F| for each
(9
=
1
in ciuestion). In particular,
p{s), the relative asymptotic likehhood of
different priors
...,
K
wheneverW({Tk
condition in part 2 of Theorem
two individuals with
I,
and for each
,
{n'yn
i
=
Sup1,2,
{n')m{f^{p{s))
G 9.
plays the role of differences in priors in
pose of the vector
—
and Agreement)
if
6,
that Pr'HTk {TT^)-Tk {n^)yTk{f'{p{s))
Theorem
2 (here
'
"
denotes the trans-
this condition did not hold, then at
some
states could be the
and they would interpret
31
"
at least
some
same according
to
some sequences
of
=
.
.
manner and achieve asymptotic agreement.
signals in a similar
-
that the condition that Pr'((Tfc {n^)
and holds generically
restore
it.^"*
—
The Part
if it
i.e.,
{ir'^))'Tk{.f"'{p{s))
=
=
0)
important to note
is
did not hold, a small perturbation of
Theorem
2 of
Tk
It is
weak
relatively
tt^
or
tt^
would
6 therefore implies that asymptotic disagreement
occurs generically.
We
this
next define continuity and discontinuity of asymptotic agreement at certainty in
more general
case.
A
family of subjective probability distributions
by {Fg.^}. Throughout {Fg^} converge
and
5j,i
when
by
such that there
is
learning
0fc,oo,m
and
is
is
asymptotic agreement (that
for
all
e
>
(pl^^,^, for
0,
=
/c
K
1, ...,
—
for each k
1,
hm
Asymptotic agreement
K
...,
Pr''-^"
m~->oo
and
all
and for each
Mil
(|0U,m.
families
>
there exists e
=
1,
...,
K
-
i
=
ous at certainty at
4,o.,m\
1
1
(p^.p'^)
"More
1,2.
G
A
(L)
<
e)
=
1-
{p^,p'^)
0.
This
is
G A(L)'^
if it is
con-
to 5^^
strongly discontinuous at certainty under
l
Asymptotic agreement
^
Theorem
formally, the set of solutions
has Lebesgue measure
denoted
such that
=
result generalizes
beliefs are
1
//
is
asymptotic agreement
ous at certainty under some family {Fg^^} converging
The next
asymptotic agreement
1,2,
{Fq^} converging
is
i
and each
where p^ G A(L),
N.
hm Pr''"(Koo,m-<oo,.J>^) =
for each k
is
again denoted
continuous at certainty under family {Fg^}
is
Definition 6 Asymptotic agreement
if
mG
continuous at certainty at
is
tinuous at certainty under
family {Fg.^}
there
is,
under uncertainty). The corresponding asymptotic
Definition 5 Asymptotic agreement
if
to a Dirac distribution 5p^,
is
to
strongly discontinuis
strongly discontinu-
5.pi
3:
5 = {{k\
k'''
,
p)
G A(L)2
:
a consequence of the Preimage
(2^
(tt')
- Tk {n-)YTk{f(p)) =
Theorem and
0}
Theorem in
The Preimage
Sard's
example, Guillemin and Pollack, 1974, pp. 21 and 39).
map f
Y, then f"^ (y) is a submanifold of
is a regular value of the
with dimension equal to dimX — dimF. In our context, this implies that if
map {Tk (tt^) -Tk (7r"))'Tfc(/'(p)), then the set S is a two dimensional submanifold of A(L)^ and thus
differential topology (see, for
Theorem
implies that
has Lebesgue measure
if j/ is
0.
a regular value of a
:
Sard's theorem implies that
32
is
X^
generically a regular value.
X
.
Theorem
7 (Generalized Strong Discontinuity of Asymptotic Agreement) As-
ymptotic agreement
is
strongly discontinuous at each
Towards generalizing Theorem
of probabiHty densities
Assumption 3 For
{i, 9,
whenever 9
m) =
^
9'
,
{p^ ,p^)
€
A [Lf^
we now formally present the appropriate
5,
families
and introduce the necessary notation;
Q
each 9 &
fi^,ip)
where c
.
1/ /pg^(^)
and
=
/ {m
let the
c{i,e,m) f {m{p
[p
and f :M.^ —^M.
m G N,
-p
(?:,
9))) dp,
p
subjective density
fg^
be defined by
- p{i.e)))
(?,
9)
G
A (L)
with p
(z,
9) y^
p
{i, 9')
a positive, continuous probability density function
is
that satisfies the following conditions:
(i)
lim^_,oomax|^.||^||>,j}
/
(,r)
=
0,
(u)
R{x,y)^
exists at all x,y,
^^
lim
(25)
m^oo f {my)
and
(Hi) convergence in (25) holds uniformly over a neighborhood of each [p
Writing
i
(f)\
^^
(p (s))
=
lim„^oo
cpl
(?',
9)
— p [j, 9')
,p{i,9)
„ _„ (s) for the asymptotic posterior of individual
with subjective density fg ^ we are now ready to state the generalization of Theorem
,
5.
Theorem
8
(Generalized Asymptotic Agreement and Disagreement Under
Uniform Convergence) Under Assumption
1.
Suppose that
Suppose that
the following are true:
R {p {i, 9) — p (j, 9') ,p{i,9) — p (j, ^)) =
Then, asymptotic agreement
2.
3,
is
is
9'
continuous under {i^^„,}.
R (p {i. 9) - p [j, 9')
Then, asymptotic agreement
for each distinct 9 and
,
p
{i,
9)
~
p
{j,
^)) 7^
for each distinct 9 and
strongly discontinuous under {-F(J,„}.
33
9'.
— p (j, 6)
These theorems therefore show that the
asymptotic agreement derived
in the
results
previous section do not depend on the assumption
that there are only two states and binary signals.
Propositions 2 and
1
about lack of asymptotic learning and
It is
to the case with multiple states
also straightforward to generahze
and
signals;
we omit
this to avoid
repetition.
We
assumed both the number
can be dropped
in the
of signal values
and states are
finite.
This assumption
expense of introducing technical issues that are not central to our
focus here.
Concluding Remarks
5
The standard approach
als
game theory and economic modehng assumes
in
have a "common prior," meaning that they have
regarding the
game
beliefs consistent
that individu-
with each other
forms, institutions, and possible distributions of payoff-relevant pa-
rameters. This presumption
is
often justified by the argimient that sufficient
common
experiences and observations, either through individual observations or transmission of
information from others, will eliminate disagreements, taking agents towards
priors.
common
This presumption receives support from a number of well-known theorems in
statistics,
such as Savage (1954) and Blackwell and Dubins (1962).
Nevertheless, existing theorems apply to environments in which learning occurs un-
der certainty, that
Certainty
is
is,
individuals are certain about the
meaning of
sufficient to ensure that payoff-relevant variables
iting frequencies of signals. In
many
different signals.
can be identified from lim-
situations, individuals are not only learning
a payoff-relevant parameter but also about the interpretation of different
learning takes place under uncertainty. For example,
interpretation might
source. This
may
make
many
(in
signals,
i.e.,
signals favoring a particular
individuals suspicious that the signals
prevent full identification
about
come from a biased
the standard sense of the term in econo-
metrics and statistics). In such situations, information will be useful to individuals but
may
not lead to
full learning.
This paper investigates the conditions under which learning under uncertainty
take individuals towards
common
priors
and asymptotic agreement.
We
will
consider an
environnrent in which two individuals with different priors observe the same infinite
sequence of signals informative about some underlying parameter.
34
Learning
is
under
uncertainty, however, because each individual has a non-degenerate subjective probability distribution over the
When
will
hkehhood
of different signals given the values of the parameter.
subjective probabihty distributions of both individuals have
never agree, even after observing the same infinite sequence of signals.
Our main
results provide conditions
under which asymptotic agreement
or discontinuous at certainty (meaning that as the
amount
asymptotic agreement
ishingly small
amount
is
amount
We
first
show that
of uncertainty about the signal distribution can guarantee that
close to
1
that they will asymptotically
Under additional strong continuity and uniform convergence assumptions,
also characterize the conditions under
certainty.
fragile
discontinuous at certainty for every model. In particular, a van-
both individuals attach probability arbitrarily
disagree.
is
of uncertainty in the envi-
ronment diminishes, we remain awaj' from asymptotic agreement).
we
support, they
full
which asymptotic agreement
is
continuous at
Even under these assumptions, asymptotic disagreement may
prevail as the
of uncertainty vanishes, provided that the family of subjective distributions has
regularly- varying tails (such as for the Pareto, the log-normal or the t-distributions). In
contrast, with rapidly-varying tails (such as the normal and the exponential distributions),
convergence to certainty leads to asymptotic agreement.
Lack of common
beliefs
and common priors has important implications
for
economic
behavior in a range of circumstances. The type of learning outlined in this paper interacts
with economic behavior in various different situations. The companion paper, Acemoglu,
Chernozhukov and Yildiz (2008), ihustrates the influence
and lack of asymptotic agreement on games
of learning under uncertainty
of coordination,
bargaining, asset trading and games of communication.
35
games
of
common
interest,
Appendix: Omitted Proofs
6
Lemma
Proof of
Write
1.
jlv'"{\-pY-'-fB{i-v)dp
{rn\9
Pr''
=
A)
?)-"-'- fA{'p)dp
j„'p-"(l-p)"-'-"/B(l-p)rip
_
~
Jo'p'-"(l-p)"-'-"dp
Jo'p'"(l-p)"-^'"/4(p)rfp
Jo'p'''(l-p)"-'"rfp
E^ifBJl
~ p)\rn]
E^[fA{p)K]
Here, the
first
The
same term.
— p)
equality
obtained by dividing the numerator and the denominator by the
is
resulting expression
on the numerator
is
the conditional expectation of
(Lebesgue) prior on p and the Bernoulli distribution on
—p)\r„]:
Denoting
this
by
and the denominator, which is similarly defined as
E'^[/b(1
{st}(Lothe conditional expectation of Ja (p), by E'^[/.4(p)|r„], we obtain the last equality. By Doob's
/b
(1
given r„ under the
flat
consistency theorem for Bayesian posterior expectation of the parameter, as r„
that E^[/s(l -p)|r„,] -^ /b(1 - p) and E'M/4(p)|r„] -- /^(p) (see,
and Ramamoorthi, 2003, Theorem 1.3.2). This establishes
»
p,
we have
Doob, 1949, Ghosh
B)
Pr'(r,,,|
Pr'-
e.g.,
—
R'
=
irn\0
A)
(P)
as defined in (4). Equation (3) then follows from (2).
Proof of Theorem
where
xe
9'
^
9,
e
= 1 — e [pg, —
=
\
=^
A/2)
-
For each ?n S>
4.
1/m, p\
e^ (l
-
=
xe/\
ifpe [p',-A/2,p^ +
s^
if
e
otherwise,
pa
-
p^,
<^
+
is
clearly decreasing
f
1
fl -
e^jXA
fp^4
m
is
oo
/?.'•'"
(p)
-
<(
1
-
-
p^,
(0, 1).
A/2]
A/2,
A,
= pa -
p\
Here, xg
is
X,
p%
I
p
p'b
-
>
large.
+
A/2
p:4
+
For e
A/2 < p
< p\ -
<p<p:4 +
A/2,
A/2,
A/2,
=
0,
we have
p < 1 - ?5)5 + A/2,
ifl - p'e + A/2 <p<p'4- A/2,
if
if
p >
p'4
36
-
A/2,
= Pb +
close to 1 for large
1-Pb-A/2<p<1-p's + A/2,
XBJe^
when
<
p^ ^ Pb -
A,
A/2) e
if
which
p
ifp<l-p'g-A/2,
l/e2
f
i?''™ (p)
=
1, let
A, and
m. Then,
and hence
ifp<l-p'B +
0r(p)-<(
Notice that when p G
-
p2j
V^'"
we have <p'^
{p)
^
and
the proof of theorem,
(P)
(/>^"' (/j)
we then
-
lim Pr^-- (10^- {p)
771—>00
ifi-p^B+V2<p<p:4-A/2,
1
if>
\l2,ii\
-
0^'"
{p)\
+
=
> p\ -
A/2]
</'^"'
(P)|
A/2.
<v\-
we have p
,
=
1-vri. Similarly,
tt^ so that
Z = min
pick
'
A/2,
^'-
k;!'io"'
{tt", 1
—
tt^
}
>Z)^ hm<0O Pr^'™ (p e
777—
=
(p)
(p)
^
(^^ [p) ^ 1 and
- p^ - A/2,pij + A/2],
A/2, so that
when ^ £
[l
TT
In order to complete
.
/2. In that case,
-
[l
p^j
-
+ A/2])
'J/ =
A/2,p)j
'"
>
I-tt^
and
lim Pr^.- (|<^Ji- (p)
-
> Z) =
</,^- (p)|
lim Pr^-- (p €
[p?i
-
A/2,p2
+
A/2])
=
tt^
>
0,
completing the proof.
Proof of Theorem
6.
(Proof of Parti) This part immediatel)^ follows from Lemma 2, as each fr^ifAy (p(s))
positive, and TT%fAk {p{s)) is finite.
(Proof of Pai't 2) Assmiie Fg = Fg for each
G 0. Then, bj' Lemma 2, 4>\ooip)
6'
4>k,ooiP)
=
if
and only
if
(tt^)
(7^
-
Tk {n~))' Tk [{feiP))eeQ)
under both probability measures
probability
Proof of Theorem
for all 9,9' (including 9
Pick sequences jd^"'
7.
=
Pr'^
For each
9').
—
>
iff
e
=
will
61'
be the
andi =
pg and
^
is
1,777
such that
< e/m}
normalized so that /^
^^
—
>
^
5^. for
is
4,777,
ifpel)(,
1/m
otherwise.
2,771.
-
'e
>
Pf,'
e/r
i.
,
Notice that Dl'^TiD^g,'^
a probability density function.
each
(6*,
^
i).
We will
By
construction of se-
show that agreement
is
discontinuous
{FlJ. Now
</'L.,0,m (P)
if
>
Define
quences /g ^ and Pg™', Fl
under
inequality has
'^^^^ ^^^^^^
{9,i), define
/ff.77,,(P)
where x\
e
set of likely frequencies at state 6 according to
?:'.
~~
and Pr" by hypothesis.
D y" = {peA{L):3 P-Pe
which
"" ^-
is
p e Dg"'' for some 9 and
^J^j m. (p)
—
~
^' otherwise.
Note that
<i>^oo,e,m.
Moreover, since the sets D^'™' are disjoint (as we have seen above),
p G Dg"*. Hence, there
exist
m
such that
||<?^'oo,777,
for
any
m
>
m
(p)-'^io,m(p)||
37
and any p G
>£
(p)
^
1 if
4>'oo,m.{p)
£?'"'
=
—
P S Z?g"\
'"'"'
[jgDg"^,
when
0,
where e
Pr'-"' (p
=
-
minj,^ [l
G D''"') >
1
But
tt^J /2.
- 1/m.
Lemma
>
ip e Dg'"'|0j
6, Pr'-'"
- 1/m, showing
1
that
Therefore,
,hm
Proof of Theorem
each
for
Our proof
8.
=
Pr''"'(||(^'^,„,-C,,„,||>c)
l.
utihzes the following two lemmas.
A.
1
lim
fc.OO.TTA
(P)
l
Proof. By condition
k and k',
m^oo p^^
Then,
m->oo c
[p)
Lemma A
Lemma
follows
B. For any
and each p{s) with
Iimm.-,oo c
(i),
A;,,
(z,
\\p{s)
m)
Ak, rn)
{i,
—
1
for
each
and
i
Hence, for every distinct
k.
[m [p-p{l,Ak)))
m-^oo /
Lemma
from
e
+ E;e'^/c5^^(p-p(i,AfcO,p-p(i,A,))
2.
> and h > 0, there
— p{i,Ai,)\\ < h/m,
m
exists
such that for each in
>
ifi,
k
< K,
<
Proof. Since, by hypothesis,
by
Lemma
A, there exists h'
hm
m.—>oo
and by condition
(iii),
>
R. is
0,
m
each
k'
^
if
—p
(j, 9')
,p
(?',
9)
—p
9)),
{j,
{p
Afc))
(i,
<
i/2
(27)
'
— p{i,Ak)\\ <
h'
lim
The inequahties
.
(i, -4fc))
-
<^i_oo,m
<
[p (s))
(?5 (^.
£/2.
in (27)
^fc)))
=
(28)
and
iff
(28) then
.R (p (i,
imply
A^) - p
(26).
(j, ^/t')
,P
(i,
A^)
- p {j
k.
Lemma A implies that
and only
(/>1,,^ ,„
m—>oo 4,^,„,
'
(4,oo,m (P
lim
rn—too
Proof. Proof. Since R{p[i,Ak) — p
if
9)
h/h! such that
-
'
for
>
(*))
4,oo,m (P
Lemma C. Imw^oo
-
'
'
(z,
such that
^1,,^_,„ {p (s))
there exists
holds uniformly in \\p{s)
continuous at each (p
(26)
(i,
^4^/) ,0)
limTO_,oo<)^fc,oo,-m(p(^'^fc))
limm^oo
<?^i,oo,m
(p(i,^fc))
= L
=
1-
=
for
each
Hence, linim^oo
Since each ratio
38
k'
^
k (by condition
(?^fc,co,m
7r|,,/7r'[
is
(P(^^A-))
positive,
by
(i)).
"
<?^fc,oo,m
Lemma
(P(^'^fc))
.
A, the latter holds
only
if
R {p
if
Ak)
(z,
- p {j, Ai-,)
- p {j,
Ak)
,p{i,
=
Ak))
each
for
k' y^ k.
m
(Proof of Part
1) Fix
>
e
Pr'' (||<^L,n,.(s)
Fix any
and
i
(i),
Since each
k.
>
<Pk,oo,m (pis))
1
-
e
>
there exists ho^k
-
>
S
f\^^
is
We
0.
cl>l,m (s)||
7r-^//7r;[
whenever
0,
and
m e N such
will find
>e)<5
by
finite,
that
{^m>m,i =
Lemma
<
{p{s))/f\^ {p{s))
1,2).
there exists
2,
>
e'
holds for every k'
e'
0,
such that
7^ k.
Now, by
such that
= Ak)=
Fv''i\\p{s)-p{i,Ak)\\<ho,k/m\9
f
/
(x)
>
dx
{1
-
S)
Let
Qk,rr,.
and
f
K.
(x)
= min||j,||</,g f {x) >
< €'k/2. There exists
0.
^,
p{s) e Qk,m., and any
c(2, Afc/,77i) /c(i, Afc,7Ti)
By
II
>
there exists hijc
(i),
we have
||p(s)
—
7nifc
>
p{i,Ak')\\
1
/(777,(p(s)-p(J,yV)))
2
k,
1 for
2 for every k'
^
each
i
k and
and
m>
6,
||2;||
such that for any
m
> hj^k,
> mi^fc,
hi^k/m, and
£Vc
—
ho,k/m}
such that, whenever
f{m{p{s)-p{i,Ak,)))
(i, ^,777.)
<
- p (i, Ak) <
\\p
a sufficiently large constant
k' 7^ k,
Moreover, since lim,„.->ooC
= {peA(L):
^
e^
2-
there exists
7712, fc
>
'irii^k
such that
This implies
7772, fc-
f\,{p{s))irA,{p{s))<e',
establishing that
^k^oo.m
Now,
and
9'.
for j 7^
7,
>
^
(p
{i,
0)
—p
(j, 6*')
(29)
— p (j,
,p{i,0)
=
9))
for
A, limm-*oo 0^ 00 m (p(^^fc)) = li and hence by
Tn2,k such that for each 771 > ma^/t, p [s) e Qkjn,
Then, by
exists m^^k
assume that
{p{s))>l-e.
Lemma
each distinct 9
Lemma
B, there
<oo,^,(/>(s))>l-e-
(30)
Notice that when (29) and (30) hold, we have ||<;i'L,,n. (*')
771 — max/j77i4 fc, we obtain the desired inequality for each
m
Pr'
(||</.^,^, is)
-
0';,,,„ {s)\\
<e)
=
Yl
P^-'
Yl
p^''
(11'^-.- (^)
-
~ '^L.jn,
> in:
(-5)11
<
<
e|e
'^'So.n (s)||
£•
- ^0
k<K
>
(^
k<K
fc</C
= 1-6.
39
(^^)
^
^'^.-1^
^
^^)
p^"'
(^
Then, setting
= ^^)
Pr'' (0
=
A^)
(Proof of Part 2) Assume that R (p {i, 6) - p {j, 9') ,p{i, 6) - p {j, 9))
and 9' We will find e > such that for each > 0, there exists m G
tinct 9
(5
.
P^' {\\<t>L,mis)
Now,
each
since each
k.
we have 0^00
>
>
<Plo.rr,.is)\\
positive.
e)
Lemma A
>l-S
(Vm >
771, Z
hmm^oo
implies that
<?^fc
=
1, 2).
,30
m (^('^'^fc)) <
dis-
^ ^^^
Let
Then, by Part
777
is
7rj,,/7r-^
-
^ for each
N such that
7775,^.
1,
for
iPi^))
and p
(s)
each
>
1
\\^lo,m (s)
-
7712, /t
m
such that for every
B, there also exists
7715,/^
>
>
and p{s) G Qk,m^
such that for every
77i2,fc
77T.2,fc
e Qfc.m,
-^ioo.m (P (5))
This implies that
there exists
k,
— £ By Lemma
lle/i^.m
(Plo,^ (5)11
<
<
J™, -^ioo.m (P
ipi^))
e
"
at the
('.
+£<
^k))
<^So,m (p('5'))||
>
^-
1
Setting
end of the proof of Part
obtain the desired inequality.
40
-
1
2e
771
<
=
0-^,^ (p (s))
-
e.
maxk'm^^k and changing
to ||0^_„. (s)
- ^^^„
(s)||
>
e,
we
References
7
Acemoglu, Daron, Victor Chemozhukov, and Muhamet Yildiz (2008):
Applications of Learning under Uncertainty"
Aumann, Robert
(1986):
,
"Economic
mimeo.
"Correlated Equilibrium as an Expression of Bayesian Ra-
Econometrica, 55, 1-18.
tionality,"
Aumann, Robert
(1998):
"Common
A
priors:
Reply to Qui," Econometrica, 66-4,
929-938.
Berk, Robert (1966): "Limiting Behavior of Posterior Distributions Wlien the Model
Annals of Mathematical
Is Incorrect,"
Statistics, 37, 51-58.
Billingsley, Patrick (1995): Probability
New
and Measure, Third Edition, Wiley and Sons,
York.
Blackwell, David and Lester Dubins (1962):
"Merging of Opinions with Increasing
Information," Annals of Mathematical Statistics, 33, 882-887.
Cripps, Martin, Jeffrey Ely, George Mailath and Larry Samuelson (2006):
"Common
Learning" Cowles Foundation Discussion Paper No. 1575, August 2006.
Doob,
J.
L.
(1949):
"Application of the Theory of Martingales," in Le Calcul des
Probabilities et ses Applications, 23-27, Paris.
Diaconis Persi and David Freedman (1986): "On Inconsistent Bayesian Estimates of
Location" Annals of Statistics, 14, 68-87.
Avinash and Jorgen Weibull (2007):
Dixit,
"Political Polarization,"
Mimeo, Prince-
ton University and Stockliolm School of Economics.
Feller,
Volume
William (1971):
II,
2nd
ed. Wiley,
An
New
Introduction to Probability Theory and
Its
Applications.
York.
Freedman, David (1963): "On the Asymptotic Behavior of Bayes Estimates
Discrete Case
I"
Annals of Mathematical
in the
Statistics, 34, 1386-1403.
Freedman, David (1965): "On the Asjanptotic Behavior of Bayes Estimates
in the
Discrete Case IF' Annals of Mathematical Statistics, 36, 454-456.
Fudenberg Drew and David Kreps (1995): "Learning
Confirming Equihbria," Games and Economic Behavior,
Fudenberg,
rica, 61,
Drew and David Levine
(1993):
in
8,
Extensive Games,
I:
Self-
20-55.
"Self-Confirming Equilibria" Economet-
523- 546.
Fudenberg, Drew and David Levine (2005):
Latin American Journal of Economics, 42, 199-27.
41
"Learning and Belief Based Trade,"
Geanakoplos, John and Heraklis Polemarchakis (1982):
ever," Journal of
Ghosh
Verlang,
Economic Theory,
"We Can't
Disagree For-
28, 192-200.
K. and R. V. Ramamoorthi (2003): Bayesian Nonparametrics, Springer-
J.
New
York.
Qui, Faruk (1998): "A
Comment on Aumann's Bayesian
view", Econometri.ca, 66-4,
923-927.
Guillemin Victor and Alan Pollack (1974): Differential Topology, Prentice Hall,
New
Jersey.
Haan,
L. de (1970):
On
Regular Variaiion and
Application to the
Its
Weak Conver-
gence of Sample Extremes, Mathematical Centre Ti'act 32, Mathematics Centre, Ams-
terdam, Holland.
Jackson,
Matthew
0.,
Ehud Kalai and Rann Smorodinsky
sentation of Stochastic Processes under Learning:
De
(1999):
"Bayesian Repre-
Finetti Revisited," Econometrica,
67, 875-893.
Kurz, Mordecai (1994): "On the Structure and Diversity of Rational Behefs," Eco-
nomic Theory,
4,
877-900.
Kurz, Mordecai (1996):
duction,"
Miller,
Economic Theory,
Ronald
I.
An
"Rational Behefs and Endogenous Uncertainty:
8,
Intro-
383-397.
and Chris W. Sanchirico
(1999):
nuity in Merging of Opinions and Rational Learning,"
"The Role
of
Option with Conti-
Games and Economic
Behavior,
29, 170-190.
Savage, Leonard
J.
(1954):
The Foundations of
Statistics,
Dover
reprint.
New
York,
1972.
Seneta, Eugene (1976): Regularly Varying Functions, Lecture Notes in Mathematics,
508, Springer, BerUn.
Stinchcombe, Maxwell (2005): "The Unbearable Fhghtness of Bayesians: Generically
Erratic Updating," University of Texas, Austin, mimeo.
42
:'
/
7
'•