Stable and Stabilized hp Finite Element Methods for the Stokes Problem
advertisement

Stable and Stabilized hp Finite Element
Methods for the Stokes Problem
Dominik Schötzau 1
Klaus Gerdes 2
Christoph Schwab 3
Applied Numerical Mathematics 33, pp. 349-356, 2000
Abstract
Two hp-Finite Element Methods for the Stokes problem in polygonal domains are
presented: We discuss the S k × S k−2 elements which are stable on anisotropic and
irregular meshes and introduce a stabilized Galerkin Least Squares approach featuring equal-order interpolation in the velocity and the pressure. Both methods lead
to exponential rates of convergence provided that the data is piecewise analytic.
Numerical studies on an L-shaped domain confirm these theoretical results.
1
Introduction
The performance of any Finite Element Method (FEM) for incompressible
fluid flow is governed by its consistency and stability: Consistency is related
to the approximation properties of the FE spaces. In the context of the hpversion of the FEM it is well known that the proper design of these FE spaces
can lead to exponential rates of convergence for typical solution features arising
in fluid mechanics: Singularities near corners of the domain are resolved exponentially if geometrically refined meshes combined with increasing polynomial
approximation orders are employed, see (2). The use of anisotropic elements is
instrumental in capturing boundary layers or viscous shock profiles at robust
exponential convergence, cf. (18). Stability is a nontrivial issue in fluid flow
simulations. Stability problems arise intrinsically in the variational formulations due to incompressibility constraints or due to strongly convective terms.
The aspects related to the incompressibility constraint ∇ · ~u = 0 are already
encountered in the linear Stokes equations and there are basically two ways to
1
2
3
School of Mathematics, University of Minnesota, Minneapolis, USA.
Dept. of Mathematics, Chalmers University of Technology, Göteborg, Sweden.
Seminar for Applied Mathematics, ETH, Zürich, Switzerland.
Preprint submitted to Elsevier Preprint
December 1999
overcome this difficulty: The first one is to use stable elements which satisfy
the Babuška-Brezzi inf-sup condition (see (3; 19) for high order elements), the
second one is to use stabilized variational formulations (we mention here only
(4; 8), the survey article (6) and the references there).
We report in this paper on some recent hp-stability results and discuss their
application to Stokes flow. Firstly, we present the S k × S k−2 element family
which is analyzed in (3; 17; 19) on shape regular meshes and which is moreover
stable on highly anisotropic and irregular meshes, cf. (14; 16), i.e., the meshes
do not have to satisfy the shape regularity assumption present in almost all the
classical techniques for establishing divergence stability. This stability result
is essential for the hp-approximation of boundary layers. Secondly, we present
a stabilized Galerkin Least Squares (GLS) formulation in the hp-context. This
method accomodates for the convenient equal-order interpolation in the velocity and the pressure, see (4; 13; 15). We show that both approaches lead to
exponential rates of convergence under realistic assumption on the input data
and the mesh design. We conclude our presentation with numerical examples
on an L-shaped domain taken from (7). We refer to (8; 9; 10; 11; 12) and the
references there for related and more aspects on fluid flow simulation in the
hp-/spectral context.
In a bounded polygonal domain Ω ⊂ R2 we consider the Stokes problem for
viscous incompressible fluid flow whose mixed formulation is the following:
Find a velocity field ~u ∈ H01 (Ω)2 and a pressure p ∈ L20 (Ω) such that
B0 (~u, p; ~v , q) = F0 (~v , q)
for all (~v , q) ∈ H01 (Ω)2 × L20 (Ω).
Here, B0 (~u, p; ~v , q) = ν(∇~u, ∇~v ) − (∇ · ~v , p) − (∇ · ~u, q) and F0 (~v , q) = (f~, ~v ).
ν > 0 is the kinematic viscosity of the flow and the right hand side f~ is a given
body force per unit mass. L2 (Ω) = H 0 (Ω) is the space of square-integrable
functions with inner product (·, ·) and L20 (Ω) := {f ∈ L2 (Ω) : (f, 1) = 0}.
We denote by H 1 (Ω) the standard Sobolev space of order 1 and by H01 (Ω) its
subspace of all functions with zero trace on the boundary ∂Ω. For f~ ∈ L2 (Ω)2
there exists a unique weak solution (~u, p).
2
The stable S k × S k−2 element family
~N,0 ⊂ H 1 (Ω)2 , MN,0 ⊂ L2 (Ω), the Galerkin discretization
Given FE spaces V
0
0
~N,0 × MN,0 such that
of the Stokes problem is to find (~uN , pN ) ∈ V
~N,0 × MN,0 .
B0 (~u, p; ~v , q) = F0 (~v , q) for all (~v , q) ∈ V
2
(1)
If the FE spaces satisfy the following discrete inf-sup stability condition
inf
sup
06=q∈MN,0 ~
~N,0
06=~v ∈V
(∇ · ~v , q)
≥ γ(N ) > 0,
k~v kH 1 (Ω) kqkL2 (Ω)
(2)
then (eq.1) has a unique solution (~uN , pN ) ∈ V~N,0 × MN,0 and we have quasioptimal error estimates (up to a possible loss if the inf-sup constant γ(N ) in
(eq.2) is not completely independent of the discretization parameter N ).
For many pairs of velocity and pressure spaces the condition in (eq.2) has been
established. In the context of high order methods we mention here only (3; 19)
where several hp-elements are analyzed which satisfy (eq.2) on shape regular
meshes consisting of parallelograms with γ(N ) independent of the meshwidth
h and (weakly) dependent on the polynomial order k. Among those are the
S k × S k−2 elements which are in addition stable on anisotropic and irregular
meshes and on meshes which may contain triangles:
Let T be an affine mesh on Ω, i.e., for each K ∈ T there is an affine element
mapping FK such that K = FK (K̂) where K̂ is the generic reference element
which is either the reference triangle T̂ = {(x, y) : 0 < x < 1, 0 < y < x} or
the reference square Q̂ = (0, 1)2 . The diameter of the element K is hK . Denote
by k the polynomial approximation order. The hp-FE spaces are defined as
S k,l (T ) = {f ∈ H l (Ω) : f |K ◦ FK ∈ S k (K̂), K ∈ T },
l = 0, 1.
Here, S k (K̂) is to be understood as Qk (K̂) (polynomials of degree ≤ k in each
variable) if K̂ = Q̂ and as P k (K̂) (polynomials of total degree ≤ k) if K̂ = T̂ .
The S k × S k−2 elements are then (for k ≥ 2)
~N,0 = S k,1 (T )2 ∩ H 1 (Ω)2 ,
V
0
MN,0 = S k−2,0 (T ) ∩ L20 (Ω).
(3)
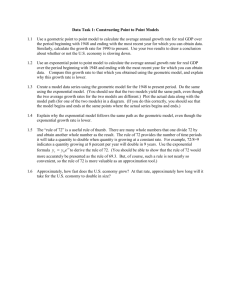
The stability of S k × S k−2 elements has been investigated on the following
reference meshes on (0, 1)2 shown in Figure 1:
On the irregular geometric mesh ∆n,σ with n + 1 layers and grading factor
σ, the spaces in (eq.3) satisfy (eq.2) with γ(N ) = Ck −1/2 where C just depends on σ, see (16). If the hanging nodes in ∆n,σ are removed by additional
e
triangles, we get the regular geometric mesh ∆
n,σ . There, (eq.2) holds with
−3
γ(N ) = Ck . This follows from the arguments in (17) where divergence stability on the reference triangle T̂ is proved. Stability on the boundary layer
mesh ∆Tx in Figure 1 is investigated in (14): (eq.2) holds with γ(N ) = Ck −1/2
with a constant C independent of the one dimensional mesh Tx in x-direction.
Particularly, this implies divergence stability for anisotropic elements of arbitrarily high aspect ratio. An analogous stability result holds true for the
geometric tensor product mesh ∆2n,σ , cf. (16). These local stability results can
be combined with the use of a macro-element technique into the following
global result valid for the class of “geometric boundary layer meshes” which
3
∆n,σ
1
1
0
1
0
1
∆T x
Tx
refmeshes.eps
96 × 71 mm
0
1
0
1
e
∆
n,σ
∆2n,σ
1
1
e n,σ with n = 3
Fig. 1. Reference meshes on (0, 1)2 : The geometric meshes ∆n,σ and ∆
and σ = 0.5, the boundary layer mesh ∆ Tx and the geometric tensor product mesh
∆2n,σ .
are essentially shape regular meshes that are refined locally as in Figure 1 (the
detailed definitions can be found in (14; 16)):
Theorem 1 The S k ×S k−2 elements in (eq.3) are divergence stable on meshes
containing highly anisotropic elements or geometric refinement with hanging
nodes. The inf-sup constant γ(N ) in (eq.2) can be estimated by Ck −1/2 if
the mesh consists only of quadrilaterals and by Ck −3 if it contains triangles.
The constant C is independent of the element aspect ratio of the anisotropic
elements.
amesh.eps
95 × 69 mm
Fig. 2. Geometric boundary layer meshes near convex and reentrant corners.
4
More reference meshes than shown in Figure 1 are allowed for the further local
refinement and we show some examples of admissible meshes in Figure 2. The
underlying coarse “macro-patches” are indicated by bold lines. In (14; 16) we
illustrate how S k × S k−2 elements on these meshes can approximate boundary
layers and corner singularities at exponential rates of convergence. We remark
in passing that Theorem 1 can also be formulated for variable, i.e., elementwise
approximation orders.
3
Galerkin Least Squares Stabilization
From an implementational point of view the most convenient choice of the FE
spaces for the Stokes problem are elements of equal polynomial order in the
velocity and the pressure, i.e.,
V~N,0 = S k,1 (T )2 ∩ H01 (Ω)2 ,
MN,0 = S k,1 (T ) ∩ L20 (Ω),
(k ≥ 2).
(4)
However, in that case the inf-sup constant γ(N ) in (eq.2) is zero. A possible
relaxation is to use stabilized variational formulations. We consider here an
hp-method of Galerkin Least Squares (GLS) type which has been proposed in
(4) and extended to an hp-FEM on geometric meshes in (13; 15) (see also (6)
for h-version approaches). We define for an user-specified parameter α ≥ 0 a
modified bilinear form Bα and a modified functional Fα by
Bα (~u, p; ~v , q) = ν(∇~u, ∇~v ) − (∇ · ~v , p) − (∇ · ~u, q)
X h2K
−α
(−ν∆~u + ∇p, −ν∆~v + ∇q)K ,
4
K∈T k
Fα (~v , q) = (f~, ~v ) − α
X
K∈T
h2K ~
(f , −ν∆~v + ∇p)K .
k4
Above, (·, ·)K is the L2 (K)2 inner product on the element K. The GLS method
~N,0 × MN,0 such that
for the equal-order spaces in (eq.4) is to find (~uN , pN ) ∈ V
~N,0 × MN,0 .
for all (v, q) ∈ V
Bα (~uN , pN ; v, q) = Fα (~v , q)
(5)
For α = 0, the GLS method in (eq.5) reduces to the Galerkin approach given
in (eq.1). The stability of this GLS method on shape regular affine meshes is
addressed in (4):
There exists a constant αmax (not known explicitly, but independent of the
element size hK and the approximation order k) such that (eq.5) has a unique
solution for 0 < α < αmax .
5
4
Exponential convergence results
If the right hand side f~ is analytic, then it follows that ~u and p are analytic in
M
Ω \ ∪M
i=1 Ai where {Ai }i=1 denote the vertices of Ω. However, there are corner
singularities at the vertices Ai of Ω. (Boundary layers are not present in this
context.) It is well known for closely related elasticity and potential problems
in polygonal domains that under the analyticity assumption on the data the
solutions belong to countably normed spaces Bβl (Ω), see (1). For the Stokes
problem the corresponding regularity assumption is
~u ∈ Bβ2 (Ω)2 ,
p ∈ Bβ1 (Ω),
for some β ∈ (0, 1)
(6)
(the value of β depends on the corner angles of Ω). We refer to (1) for the
exact definition of these spaces.
In order to capture the singular behaviour of (~u, p) near corners we use shape
regular meshes that are geometrically refined towards the vertices {Ai }: A
geometric mesh Tn,σ in the polygon Ω ⊆ R2 is obtained by mapping the basic
e
geometric meshes ∆n,σ or ∆
n,σ shown in Figure 1 from Q̂ affinely to a vicinity
of each convex corner of Ω. At reentrant corners three suitably scaled copies
e
of ∆n,σ or ∆
n,σ are used (as is indicated in Figure 3). The remainder of Ω is
subdivided with a fixed quasiuniform and regular partition.
A3
Tn,σ
A4
A2
geopolygon.eps
69 × 48 mm
A1
A5 = A 0
Fig. 3. A geometric mesh Tn,σ on Ω.
In Figure 3 this local geometric refinement is illustrated. We consider here
only mesh patches that are identically refined with a fixed σ and n and we
assume that k is chosen propertional to n + 1, the number of layer refinements
in the geometric patches. Then we have exponential rates of convergence:
Theorem 2 Let (~u, p) be the exact solution of the Stokes problem satisfying
the regularity assumption in (eq.6). Let (~uN , pN ) be the discrete solution of the
Galerkin approach in (eq.1) or the GLS method in (eq.5) (with the corresponding spaces defined in (eq.3) and (eq.4), respectively) obtained on a geometric
6
mesh Tn,σ with polynomial degree k. Then there exists a µ0 > 0 such that for
k = max(2, bµ(n + 1)c), µ ≥ µ0 , we have
1
k~u − ~uN kH 1 (Ω) + kp − pN kL2 (Ω) ≤ C exp(−bN 3 ).
~N,0 ) ≈ dim(MN,0 ) and the constants C and b are independent
Here, N = dim(V
of N . In the case of the GLS method the constant C depends on α.
Note that in (eq.1) the pressure is approximated discontinuously whereas in
(eq.5) the pressure is continuous. However, Theorem 2 holds true for both
methods irrespective of whether the pressure is interpolated continuously or
discontinuously. Moreover, both approaches lead to exponential rates of convergence if the approximation order is variable and the polynomial degree
distribution on the elements increases linearly away from the vertices. The
results for the Galerkin method are from (17), for the GLS-formulation they
can be found in (13; 15). The dependence of the constant C on the viscosity
ν seems not to be known at present.
5
Numerical examples
We report on some numerical experiments for both approaches in an L-shaped
domain appearing, for example, in the backward facing step flow problem.
The results are from (7) where several other related implementational and
numerical aspects are presented. The Stokes problem was solved with exact
solution (in polar coordinates)
0
(1 + λ) sin(ϕ)Ψ(ϕ) + cos(ϕ)Ψ (ϕ)
,
~u(r, ϕ) = r λ
sin(ϕ)Ψ0 (ϕ) − (1 + λ) cos(ϕ)Ψ(ϕ)
p = −r λ−1 [(1 + λ)2 Ψ0 (ϕ) + Ψ000 (ϕ)]/(1 − λ),
Ψ(ϕ) = sin((1 + λ)ϕ) cos(λω)/(1 + λ) − cos((1 + λ)ϕ)
− sin((1 − λ)ϕ) cos(λω)/(1 − λ) + cos((1 − λ)ϕ),
ω = 3π
and λ ≈ 0.54448. This solution satisfies the Stokes equations with
2
zero right-hand side, ν = 1 and has nonzero boundary conditions on the
sides of the L-shaped domain which do not abut at the reentrant vertex,
cf. (7). It reflects the typical singular behaviour of solutions near reentrant
corners and assumption (eq.6) is satisfied. The implementation of the two hpmethods was accomplished in the general purpose code HP90, a FORTRAN90
hp-FE framework for elliptic systems, see (5). HP90 allows for isotropic and
anisotropic h- and p-refinement and is designed to handle irregular meshes
7
with hanging nodes by enforcing the appropriate continuity requirements.
The error graph in Figure 4 was obtained for the GLS method with the equal
order elements in (eq.4). We chose σ = 0.5 and α = 0.1. The number of
layers in the geometric mesh is related to k by n = k + 2. We show the
relative error in the H 1 - and L2 -norm for the first velocity component and the
pressure against N , the number of degrees of freedom. The graph demonstrates
exponential convergence as predicted by Theorem 2. With σ = 0.5 we obtain
reliable results for the Galerkin ansatz in (eq.1) with S k × S k−2 elements as
well, but the optimal grading factor is known to be σ ≈ 0.15 in one dimension
(independently of the strength of the singularity). We expect the optimal
σ to be of approximately the same order in two dimensions. To study the
dependence on σ we use geometric meshes that have bilinear element mappings
and do thus not completely fall into our theory. In Figure 5 we demonstrate the
influence of the mesh grading for the Galerkin approach. It can be seen that
for all values of σ we get exponential convergence. Further, the performance
is best for σ = 0.15 and σ = 0.2. This supports the importance of refining
towards the singularity with the grading factor ≈ 0.15.
hp−version performance, alpha=0.1, sigma=0.5
−1
10
relative error in H1−norm/L2−norm
1st velocity comp.
pressure
−2
10
hpglsbild.eps
61 × 50 mm
−3
10
−4
10
5
10
15
20
number of degrees of freedom 1/3
25
30
Fig. 4. GLS: Relative errors for the first velocity component and the pressure.
First Velocity Component
0
10
Pressure
0
10
σ=0.1
σ=0.15
σ=0.2
σ=0.3
σ=0.5
σ=0.1
σ=0.15
σ=0.2
σ=0.3
σ=0.5
−1
−1
10
Relative Error
Relative Error
10
su.eps
61 × 50 mm
−2
10
−3
−3
10
10
−4
10
sp.eps
61 × 50 mm
−2
10
−4
6
8
10
12
# Degrees of Freedom1/3
14
16
10
18
6
8
10
12
# Degrees of Freedom1/3
14
16
18
Fig. 5. Galerkin with S k × S k−2 elements: Relative errors for the first velocity
component and the pressure on geometric meshes with k = n + 2 and varying σ.
8
References
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
I. Babuška, B.Q. Guo: Regularity of the solution of elliptic problems with
piecewise analytic data I and II, SIAM J. Math. Anal. 19 (1988), 172-203,
and 20 (1989), 763-781.
I. Babuška and M. Suri: The p- and hp-versions of the finite element method:
An overview, Computer Methods in Applied Mechanics and Engineering 80
(1990), 5-26.
C. Bernardi and Y. Maday: Approximations spectrales de problèmes aux
limites elliptiques, Springer Verlag, Paris-New York, 1992.
E. Boillat and R. Stenberg: An hp error analysis of some Galerkin Least
Squares methods for the elasticity equations, Research Report 21-94, Helsinki
University of Technology, 1994.
L. Demkowicz, K. Gerdes, C. Schwab, A. Bajer and T. Walsh: HP90: A general
& flexible Fortran 90 hp-FE code, Comput. Visual. Sci. 1 (1998), 145-163.
L.P. Franca, T.J.R. Hughes and R. Stenberg: Stabilized finite element methods, Incompressible Computational Fluid Dynamics: Trends and Advances,
Eds.: M.D. Gunzburger and R.A. Nicolaides, Cambridge University Press,
1993.
K. Gerdes and D. Schötzau: hp-FEM for incompressible fluid flow - stable and
stabilized, Finite Elements in Analysis and Design 33 (3) (1999), 143-165.
P. Gervasio and F. Saleri: Stabilized spectral element approximation for the
Navier-Stokes equations, Numerical Methods for Partial Differential Equations 14 (1998), 115-141.
J. T. Oden, T. Liszka and W. Wu: An h-p adaptive finite element method
for incompressible viscous flows, The Mathematics of Finite Elements and
Applications VII, Ed.: J. Whiteman, Academic Press Limited, 1991, 13-54.
J. T. Oden, W. Wu and M. Ainsworth: An a posteriori error estimate for finite
element approximations of the Navier-Stokes equations, Computer Methods
in Applied Mechanics and Engineering 111 (1994), 185-202.
A. Patra and J. T. Oden: Problem decomposition for adaptive hp finite element methods, Computer Systems in Engineering 6 (1995), 97-109.
S. J. Sherwin and G. E. Karniadakis: A triangular spectral element method:
Applications to the incompressible Navier-Stokes equations, Computer Methods in Applied Mechanics and Engineering 123 (1995), 189-229.
D. Schötzau, K. Gerdes and C. Schwab: Galerkin Least Squares hp-FEM for
the Stokes problem, Comptes Rendus de l’Académie des Sciences Paris, t.
326 (1998), Série I, 249-254.
D. Schötzau and C. Schwab: Mixed hp-FEM on anisotropic meshes, Math.
Models and Methods in Applied Sciences 8 (5) (1998), 787-820.
D. Schötzau and C. Schwab: Exponential convergence in a Galerkin Least
Squares hp FEM for Stokes flow, SAM Research Report 99-10, ETH Zürich,
submitted.
D. Schötzau, C. Schwab and R. Stenberg: Mixed hp-FEM on anisotropic
meshes II: Hanging nodes and tensor products of boundary layer meshes,
Numerische Mathematik 83 (4) (1999), 667-697.
C. Schwab and M. Suri: Mixed hp finite element methods for Stokes and Non-
9
[18]
[19]
Newtonian flow, Computer Methods in Applied Mechanics and Engineering
175 (1999), 217-241.
C. Schwab, M. Suri and C.A. Xenophontos: The hp-version of the FEM for
problems in mechanics with boundary layers, Computer Methods in Applied
Mechanics and Engineering 157 (1998), 311-333.
R. Stenberg and M. Suri: Mixed hp finite element methods for problems in
elasticity and Stokes flow, Numerische Mathematik 72 (1996), 367-389.
10