SUPER CONVER GENCE OF
advertisement

SUPERCONVERGENCE OF THE LOCAL DISCONTINUOUS
GALERKIN METHOD FOR ELLIPTIC PROBLEMS ON CARTESIAN
GRIDS
BERNARDO COCKBURN , GUIDO KANSCHAT y , ILARIA PERUGIA z , AND DOMINIK
x
SCHOTZAU
SIAM J. Numer. Anal., Vol. 39, No. 1, pp. 264{285, 2001
Abstrat. In this paper, we present a superonvergene result for the loal disontinuous
Galerkin (LDG) method for a model ellipti problem on Cartesian grids. We identify a speial
numerial ux for whih the L2 -norm of the gradient and the L2 -norm of the potential are of orders
k + 1=2 and k + 1, respetively, when tensor produt polynomials of degree at most k are used;
for arbitrary meshes, this speial LDG method gives only the orders of onvergene of k and k +
1=2, respetively. We present a series of numerial examples whih establish the sharpness of our
theoretial results.
Key words. Finite elements, disontinuous Galerkin methods, superonvergene, ellipti problems, Cartesian grids.
AMS subjet lassiations. Primary 65N30.
1. Introdution. In this paper, we derive a priori error estimates of the loal
disontinuous Galerkin (LDG) method on Cartesian grids for the following lassial
model ellipti problem:
u = f
u = gD
ru n = g N n
in ;
on D ;
on N ;
(1.1)
where is a bounded domain of Rd , d = 2; 3, and n is the outward unit normal to
its boundary = D [ N ; we assume that the (d 1)-measure of D is nonzero.
This paper is a natural ontinuation of the work done in [3℄ by Castillo, Cokburn,
Perugia, and Shotzau where the rst a priori error analysis of the LDG method for
purely ellipti problems was arried out. Meshes onsisting of elements of various
Shool of Mathematis, University of Minnesota, Vinent Hall, Minneapolis, MN 55455, USA,
email: okburnmath.umn.edu. Supported in part by the National Siene Foundation (Grant DMS9807491) and by the University of Minnesota Superomputing Institute.
y Institut f
ur Angewandte Mathematik, Universitat Heidelberg, INF 293/294, 69120 Heidelberg,
Germany, email: guido.kanshatna-net.ornl.gov. This work was supported in part by the ARO
DAAG55-98-1-0335 and by the University of Minnesota Superomputing Institute. It was arried
out when the author was a Visiting Professor at the Shool of Mathematis, University of Minnesota.
z Dipartimento di Matematia, Universit
a di Pavia, Via Ferrata 1, 27100 Pavia, Italy, email:
perugiadimat.unipv.it. Supported in part by the Consiglio Nazionale delle Rierhe. This work
was arried out when the author was a Visiting Professor at the Shool of Mathematis, University
of Minnesota.
x Shool of Mathematis, University of Minnesota, Vinent Hall, Minneapolis, MN 55455, USA,
email: shoetzamath.umn.edu. Supported by the Swiss National Siene Foundation (Shweizerisher Nationalfonds).
1
2
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
shapes and with hanging nodes were onsidered and general numerial uxes were
studied. It was shown that, for smooth solutions, the orders of onvergene of the L2 norms of the errors in ru and in u are k and k + 1=2, respetively, when polynomials
of degree at most k are used. On the other hand, Castillo [2℄ and then Castillo,
Cokburn, Shotzau, and Shwab [4℄ proved a superonvergene result for one-spae
dimension transient onvetion-diusion problems, namely, that the optimal order of
onvergene of the error in the energy norm, k + 1, an atually be obtained provided
that the so-alled numerial uxes are suitably hosen. In this paper, we extend these
results to the LDG method on Cartesian grids for the multidimensional ellipti model
problem (1.1). We show that the orders of onvergene in the L2 -norm of the error
in ru and u are k + 1=2 and k + 1, respetively, when tensor produt polynomials of
degree at most k are used. Our proof of this superonvergene result is a modiation
of the analysis arried out in [3℄; it takes advantage of the Cartesian struture of the
grid and makes use of a key idea introdued by LeSaint and Raviart [8℄ in their study
of the original DG method for steady-state linear transport.
Sine our analysis is a speial modiation of that of [3℄, in order to avoid unneessary
repetitions, we refer the reader to [3℄ for a more detailed desription of the framework
of our error analysis. The organization of this paper is as follows. In setion 2, we
briey display the LDG method in ompat form, introdue the speial numerial ux
on Cartesian grids and present and disuss our main results. In setion 3, the detailed
proofs are given, and in setion 4 we present several numerial experiments showing
the optimality of our theoretial results. We end in setion 5 with some onluding
remarks.
2. The main results. In this setion we reall the formulation of the LDG
method and identify the speial numerial ux we are going to investigate on Cartesian
grids. Then we state and disuss our main results. As pointed out in the introdution,
we refer to [3℄ for more details onerning the formulation of the LDG method.
2.1. The LDG method. To introdue the LDG method, we rewrite our ellipti
model problem (1.1) as the following system of rst-order equations:
= ru
=f
u = gD
q n = gN n
q
rq
in ;
in ;
on D ;
on N :
(2.1)
(2.2)
(2.3)
(2.4)
To obtain the weak formulation with whih the LDG method is dened, we multiply (2.1) and (2.2) by arbitrary, smooth test funtions r and v, respetively, and
integrate by parts over the d-dimensional retangle K of the Cartesian grid T with
whih we triangulate the domain . Then we replae the exat solution (q; u) by its
approximation (qN ; uN ) in the nite element spae M N VN , where
M N :=fq
2 (L2 (
))d : qK 2 S (K )d ; 8K 2 T g;
VN :=fu 2 L2 (
) : uK 2 S (K ); 8K 2 T g;
(2.5)
(2.6)
and
S (K ) := Qk (K ) = fpolynomials of degree at most k in eah variable on K g:
3
The LDG method on Cartesian grids
The method onsists in nding (q N ; uN ) 2 M N VN suh that
Z
ZK
q N r dx =
ZK
uN r r dx +
Z
Z
K
ubN r nK ds;
v qbN nK ds;
K
K
for all test funtions (r; v) 2 S (K )d S (K ), for all elements K 2 T ; here, nK
K
qN
rv d x =
Z
fv dx +
(2.7)
(2.8)
denotes
the unit outward normal to K . The funtions ubN and qbN in (2.7) and (2.8) are the
so-alled numerial uxes. These are nothing but disrete approximations to the
traes of u and q on the boundary of the elements. To dene these numerial uxes,
we need to introdue some notation. Let K + and K be two adjaent elements of T ;
let x be an arbitrary point of the (d 1)-dimensional fae e = K + \ K , and let
n+ and n be the orresponding outward unit normals at that point. Let (q ; u) be a
funtion smooth inside eah element K , and let us denote by (q ; u ) the traes of
(q; u) on e from the interior of K . Then, we dene the mean values ffgg and jumps
[ ℄ at x 2 e as follows:
ffugg := (u+ + u )=2;
[ u℄ := u+ n+ + u n ;
ffqgg := (q + + q )=2;
[ q℄ := q+ n+ + q n :
We are now ready to introdue the expressions that dene the numerial uxes in
(2.7) and (2.8). If e is inside the domain , we take
b
q
:=
ub :=
ffqgg C11 [ u℄
C 12 [ q ℄ ;
and, if e lies on the boundary of ,
(
b :=
q
q+
gN
(2.9)
ffugg + C 12 [ u℄ ;
C11 (u+ gD )n on D ;
on N ;
(
and
ub :=
gD on D ;
u+ on N :
(2.10)
Moreover, the stabilization parameter C11 and the auxiliary parameter C 12 are dened
on eah fae e as follows:
C11 (e) = ;
C 12 (e) n = sign(v n)=2;
(2.11)
where is a positive real number independent of the mesh size (and hosen as = 1:0
in all our numerial experiments), and v is an arbitrary but xed vetor v with
nonzero omponents. Note that with this hoie of the parameter C 12 (e), we have
that
1
1
ub = (1 + sign(v n)) u+ + (1 sign(v n)) u ;
2
2
that is, if v is the vetor displayed in Figure 3.1, we have that on the vertial edges,
ub is always equal to the left trae of u, and on the horizontal edges, ub is always equal
to the trae of u from below. Similarly, ffqgg C 12 [ q℄ is equal to the right trae of q
on the vertial edges and the trae of q from above on the horizontal edges. In other
words, the role of the vetor v is to give a single rule to pik the numerial uxes
ub and qb for all the elements; this is the only relevant property of the hoie of the
auxiliary vetor v .
4
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
2.2. Error analysis on Cartesian grids. To state our main result, we need to
reall some notation and to introdue additional hypotheses. We restrit our analysis
to domains suh that, when f is in L2 (
) and the boundary data are zero, we have
u 2 H 2 (
) and the ellipti regularity result k u k2 C k f k0 .
We denote by hK the diameter of an element K , and set, as usual h := maxK 2T hK .
We denote by EI the set of all interior faes of the triangulation T , by ED the set
of faes on D , and by EN the set of faes on N ; we assume that D = [e2ED e
and N = [e2EN e. The Cartesian triangulations we onsider do not ontain hanging
nodes and are shape{regular, that is, if K denotes the radius of the biggest ball
inluded in K , we have
hK
K
8K 2T
(2.12)
with a positive onstant . Moreover, we denote by EN a losed set ontaining
the intersetion between the Neumann boundary N and the set
:= fx 2 :
v n(x) < 0g. We assume that the triangulation T is suh that
[
e N \
Ke EN ;
(2.13)
where Ke denotes, from now on, an element ontaining the fae e. Finally, we introdue the semi-norm j (q ; u) j2A that appears in a natural way in the analysis of the
LDG method and is dened as
j (q; u) j2A := k q k20 +
X Z
e2EI e
C11 [ u℄ 2 ds +
X Z
e2ED e
C11 u2 ds:
(2.14)
We are now ready to state our main result.
Theorem 2.1. Assume that the solution (q ; u) of (2.1){(2.4) belongs to H k+1 (
)d H k+2 (
) for k 0. If the intersetion between N and
is nonempty, we assume,
furthermore, that u belongs to W k+1;1 (EN ). Assume that the Cartesian grid T is
shape-regular, (2.12), and that it satises the ondition (2.13) if N \
6= ;. Let
(qN ; uN ) 2 M N VN be the approximation of (q; u) given by the LDG method with
k 0 and numerial uxes dened by (2.9), (2.10), and (2.11).
Then we have
ku uN k0 Chk+1
and
j (q
qN ; u
uN ) jA Chk+ 2 ;
1
where the onstant C depends solely on , , k , d, , k u kk+2 and on k u kW k+1;1(EN )
if N \
6= ;.
Several important remarks are in order before we prove this result in the next setion.
The error bounds in Theorem 2.1 improve the results in [3℄ by a fator
p
h. However, they just hold on Cartesian grids and for the partiular hoie of C 12 in
(2.11). Moreover, their proof requires stronger smoothness assumptions on the exat
solution than the ones onsidered in [3℄. In this sense, Theorem 2.1 is a superonvergene result. It an be onsidered as an extension to the bounded domain ase of
the orresponding result by Cokburn and Shu [7℄ for the LDG method for transient
Remark 2.2.
The LDG method on Cartesian grids
5
onvetion-diusion problems. It is also an extension to the multidimensional ase of
the results obtained by Castillo, Cokburn, Shotzau, and Shwab [4℄ in the one-spae
dimension ase. The key ingredient of its proof is a superonvergene result similar
to the one LeSaint and Raviart used in their study of the original DG method for
steady-state linear transport in Cartesian grids [8℄.
Remark 2.3. Note that Theorem 2.1 holds true in the ase k = 0, that is, when the
approximate solution is pieewise onstant. In [3℄, all the error estimates obtained for
the orresponding LDG method on general grids are valid only for k 1; moreover,
no order of onvergene is numerially observed for k = 0.
Remark 2.4. From an approximation point of view, the order of onvergene in q ,
namely, k +1=2, is suboptimal by one{half; however, it is onrmed to be sharp by our
numerial experiments in setion 4. For general numerial uxes and unstrutured
grids, an order of onvergene in q of only k is obtained; see [3℄.
Remark 2.5. If we onsider the more general ase where the oeÆients C11 are
hosen mesh-dependent and given in the form
(
C11 (e) = minfhKe+ ; hKe g
hKe
if Ke+ \ Ke = e;
if e (2.15)
with onstants > 0 and 2 [ 1; 1℄ independent of the mesh size, we might oneive
the possibility that a suitable tuning of the value of ould improve the order of
onvergene in q . However, this is not true, as will be made lear in the proof of Theorem 2.1 displayed in the next setion, and in the numerial results of subsetion 4.2.
See also [3℄ for other results about the inuene of the value of on the orders of
onvergene of the general LDG method.
Remark 2.6. In Theorem 2.1, an extra regularity ondition on the exat solution u
on the losed set EN ontaining part of the Neumann boundary is required. If this
ondition is dropped, and if N \ is not empty, only an order of onvergene of k
in the error in q an be proved by using our tehnique, whih represents a loss of one{
half. Note that whenever it is possible to hoose v in suh a way that N \ = ;,
no extra regularity assumption on the exat solution is required.
Remark 2.7. The set
depends on the hoie of the vetor v. As it will beome
lear in the proof, the only way the onstant C in Theorem 2.1 depends on v is
through k u kW k+1;1(EN ) if N \ 6= ;. Hene, whenever v an be hosen in suh a
way that N \ = ;, C is independent of v; in partiular, the estimates are totally
independent of the auxiliary vetor v when the boundary onditions are Dirihlet
sine then N = ;.
3. Proofs. This setion is devoted to the proof of Theorem 2.1. For simpliity,
we onsider only the ase d = 2, retangle, and the hoie of v as in Figure 3.1.
All the arguments we present in our analysis rely on tensor produt strutures and
an be easily extended to the ase d = 3. We must point out, however, that a subtle
smoothness requirement for the denition of the auxiliary projetions we use prevents
a straightforward extension of the analysis to the ase d > 3; see subsetion 3.2 for
details.
To prove Theorem 2.1, we follow the approah used by [3℄. Thus, we start, in subsetion 3.1, by briey reviewing the setting of our error analysis. We proeed in
subsetion 3.2 by introduing the projetions and whih generalize to several
spae dimensions the projetions used by Castillo, Cokburn, Shotzau, and Shwab
[4℄ in their study of the LDG method for transient onvetion-diusion problems in
6
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
2
x
6
E1+
1+
E2
2
K
E2+
2+
1
-
v = (v1 ; v2 )
1
x
E1
Fig. 3.1
. The Cartesian grid T and the auxiliary vetor v used to dene the numerial uxes.
one-spae dimension. Then, in subsetion 3.3, we derive the expressions of the funtionals KA and KB needed in the setting of [3℄ to get error estimates. To do so,
we make use of a superonvergene result essentially due to LeSaint and Raviart [8℄
whose proof is presented in subsetion 3.4. The proof of Theorem 2.1 is ompleted in
subsetion 3.5.
3.1. The framework of the error analysis. All the following results are
olleted from [3℄. First, we begin by reviewing that, by summation over all elements, the LDG method an be written in the following ompat form. Find
(qN ; uN ) 2 M N VN suh that
A(q N ; uN ; r; v) = F (r; v)
8(r; v) 2 M N VN ;
by setting
A(q; u; r; v) := a(q ; r) + b(u; r) b(v; q ) + (u; v);
F (r; v) := F (r) + G(v)
with
a(q ; r) :=
b(u; r) :=
(u; v) :=
Z
q r dx;
Z
X
X Z
K 2T K
e2EI e
X Z
e2EI e
u r r dx
C11 [ u℄ [ v℄ ds +
(ffugg + C 12 [ u℄ ) [ r℄ ds
X Z
e2ED e
C11 uv ds:
X Z
e2EN e
u r n ds;
7
The LDG method on Cartesian grids
The linear forms F , G are dened by
X Z
F (r) :=
e2ED e
Z
G(v) :=
gD r n ds;
fv dx +
X Z
e2ED e
C11 gD v ds +
X Z
e2EN e
v g N n ds:
To prove error estimates for the LDG method, we follow [3℄. We introdue two
funtionals, KA and KB , whih apture the approximation properties of the LDG
method; the funtionals are related to two suitably hosen projetions and onto
the nite element spaes M N and VN , respetively. Namely, we require KA and KB
to satisfy
j A(q q; u u; ; ' ') j KA (q ; u; ; ')
(3.1)
for any (q; u); (; ') 2 H 1 (
)d H 2 (
) and
j A(r; v; q q; u u) j j (r; v) jA KB (q ; u)
(3.2)
for any (r; v) 2 M N VN and (q; u) 2 H 1 (
)d H 2 (
), where the A-seminorm is
dened in (2.14).
By Galerkin orthogonality, all the error estimates an then be expressed solely in
terms of KA and KB as an be seen in the following result.
Lemma 3.1 (f. [3℄). We have
j (q
qN ; u
Furthermore,
k u uN k 0 uN ) jA KA1=2 (q; u; q; u) + KB (q; u):
KA (q ; u; ; ')
KB (; ')
sup
+ KB (q; u) sup
2
k
k
2
0
2L (
)
2L (
) k k0
with ' denoting the solution of the adjoint problem
and
= r'.
3.2. Projetions.
' = '=0
'
=0
n
in ;
on D ;
on N ;
In this subsetion, we dene the projetions and we
are going to use in the setting of subsetion 3.1 to prove Theorem 2.1 and list their
properties. We start by introduing the projetions and in terms of whih
the projetions and will then be dened aording to the hoie of the auxiliary
vetor v in (2.11).
In order to dene , we have to introdue some one-dimensional projetions. Let
I = (a ; a+ ) be an arbitrary interval, and let P k (I ) be the spae of the polynomials
of degree at most k on I . We denote by the L2 (I )-projetion onto P k (I ), i.e., for a
funtion w 2 L2 (I ) the projetion w is the unique polynomial in P k (I ) satisfying
Z
I
[w(x) w(x)℄ p(x) dx = 0
8p 2 P k (I ):
8
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
Furthermore, for w 2 H 12 +" (I ), we dene the projetions w 2 P k (I ) by the following k + 1 onditions:
Z
I
[w(x) w(x)℄ p(x) dx = 0
8p 2 P k 1 (I );
w(a ) = w(a ):
On a retangle K = I1 I2 , for v 2 C 0 (K ), we dene
v := v;
1
(3.3)
2
with the subsripts indiating the appliation of the one-dimensional operators or with respet to the orresponding variable. Sine H 2 (K ) and W 1;1 (K ) are
embedded in C 0 (K ), for d = 2 and d = 3 (see, e.g., [5, p. 114℄), v in (3.3) is well
dened for v 2 H 2 (K ) and v 2 W 1;1 (K ). However, for d > 3, the rst embedding is
not true and the projetions are not well dened anymore for v 2 H 2 (K ); this is
the tehnial detail that prevents a straightforward extension of our analysis to the
ase d > 3. With the notation indiated in Figure 3.1, for r 2 H 1 (K )2 , we dene
r 2 Qk (K )2 by
Z
ZK
[r
i
[r
r℄ rp dx = 0
r℄ n p ds = 0
8p 2 Qk (K );
(3.4)
8p 2 Qk (i ); i = 1; 2:
(3.5)
It an be easily seen that the onditions in (3.4) and (3.5) atually dene r in a
unique way. Note that, whenever r is smoother than merely belonging to H 1 (K )2 ,
r dened by (3.4) and (3.5) an be represented as
r = ( 2 r1 ; 1 r2 ):
(3.6)
1
2
Finally, we dene the projetions and . To do that, we must take into aount
the hoie of the auxiliary vetor v sine the analysis shows that it is essential to have
ffqN gg
ubN = uN K on e K : v nK je > 0;
C 12 [ q N ℄ = q N K on e K : v nK je < 0:
For v as in Figure 3.1, we must take
qjK := q jK ;
ujK := + ujK ;
8K 2 T :
(3.7)
This is the hoie we shall use from now on.
In our analysis, we need several approximation results whih we gather in the lemma
below.
Lemma 3.2. Let v 2 H s+2 (K ) and r 2 H s+1 (K )2 , s 0. Then for m = 0; 1, we
have
fs+1;kg+1 m kvk
jv vjm;K Chmin
s+2;K ;
K
1
kv vk0;e ChKmin fs+1;kg+ 2 kvks+2;K 8e K;
fs;kg+1 m krk
jr rjm;K Chmin
s+1;K ;
K
1
fs;kg+ 2 krk
8e K:
kr rk0;e Chmin
s+1;K
K
(3.8)
(3.9)
(3.10)
(3.11)
9
The LDG method on Cartesian grids
Furthermore, for any edge ei parallel to the xi -axis, i = 1; 2, we have
fs+ 2 ;kg+1 kwk 3
8w 2 H s+ 32 (ei )
kw i wk0;ei Chmin
ei
s+ 2 ;ei
with hei denoting the length of ei . Finally, if v 2 W s+1;1 (K ), then
kv vkL1(e) C hKmin fs;kg+1 kvkW s+1;1(K ) 8e K:
1
(3.12)
(3.13)
The onstant C depends solely on s, k , and .
Proof. The one-dimensional estimate (3.12) for i has been proven in [4, 9℄. Sine
and are linear and polynomial preserving operators, the remaining estimates
follow from the Bramble-Hilbert lemma and standard saling arguments. For the sake
of ompleteness, we give the detailed proof.
We begin by proving (3.10) and (3.11). Consider Kb = ( 1; 1)2, and set t := minfs; kg.
For q 2 Qk (Kb )2 , we dene jjjq jjj2 := kq0 k20;Kb + kq? nKb k2b + kq? nKb k2b ; where
1
2
b ) of Qk (K
b )2 , and q is the
q 0 is the L2 -projetion of q onto the subspae rQk (K
?
L2 -orthogonal omplement. It an be seen that jjj jjj is a norm in Qk (Kb )2 . If now
b )2 , from the norm equivalene in nite dimensional spaes, onditions
r 2 H t+1 (K
(3.4), (3.5), and the trae theorem, we have k rkm;Kb C jjj rjjj C krk1;Kb ,
and therefore k rkm;Kb C krkt+1;Kb . The identity operator is also ontinuous from
H t+1 (Kb )2 into H m (Kb )2 , and hene kr rkm;Kb C krkt+1;Kb . Sine r r = 0
for all polynomials r of degree t in eah variable, we an apply the lassial BrambleHilbert lemma (f., e.g., [5, Theorem 3.1.1℄) and replae the full H t+1 -norm by the
H t+1 -seminorm:
kr rkm;Kb C jrjt+1;Kb ; m = 0; 1:
Furthermore, by the trae theorem we have kr rk0; Kb C kr rk1;Kb , and
thus
kr rk0; Kb C jrjt+1;Kb :
The estimates (3.10) and (3.11) on a general element K an now be obtained by
saling arguments.
The estimates (3.8), (3.9), and (3.13) an be proven as follows. Lemma 3.7 in [9℄ states
that the one-dimensional operators i satisfy ki vk20;Ib C kvk20;Ib + C jv(1)j2 with
Ib = ( 1; 1). From this ontinuity property, realling the denition (3.3), we obtain
k vk0;Kb C kvkC 0(Kb ) , and sine H 2 (Kb ) is ontinuously embedded into C 0 (Kb ) [5,
p. 114℄, we have k vk0;Kb C kvk2;Kb . As before, from the norm equivalene in
nite dimensional spaes, the ontinuity of the identity operator from H t+1 (Kb ) into
H m (Kb ), and the Bramble-Hilbert lemma, we onlude that, for m = 0; 1,
kv
as well as
v k
m;Kb
(
C jjvvjjminf+s+1jv;kj g+1;Kb
b
b
1;K
2 ;K
(
if k 1;
if k = 0:
The estimates (3.8) and (3.9) then follow from saling arguments. Finally, (3.13) an
be proven similarly by using the ontinuous embedding of W 1;1 (Kb ) into C 0 (Kb ).
kv
vk0; Kb C
jvjminfs+1;kg+1;Kb
jvj1;Kb + jvj2;Kb
if k 1;
if k = 0;
10
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
3.3. The funtionals KA and KB . In this subsetion, we obtain the funtionals KA and KB introdued in subsetion 3.1, orresponding to the projetions
and in (3.7). We onsider the stabilization parameter C11 dened by (2.15), in
order to highlight the fat that any hoie of 6= 0 in (2.15) deteriorates the rates of
onvergene of the estimates of Theorem 2.1.
In [3, Corollary 3.4℄, KA has been investigated for general projetion operators and
satisfying the approximation results in Lemma 3.2. Thus, we just report the nal
result here.
Lemma 3.3 (f. [3℄). Let u 2 H s+2 (
), s 0, and ' 2 H t+2 (
) , t 0. Assume
C11 to be given by (2.15). Then, if we set q = ru and = r', the approximation
property (3.1) holds true with
KA (q; u; ; ') = C hminfs;kg+1 (hminft;kg+1 + hminft+1;kg )
+hminfs+1;kg+1 (hminft;kg + hminft+1;kg+ ) kuks+2k'kt+2 :
Furthermore, in the partiular ase where (; ') = (q ; u), there holds
KA (q; u; q; u) = C h2 minfs;kg+2 + h2 minfs+1;kg+1+ kuk2s+2:
The onstant C depends solely on s, t, k , and .
In [3℄, the funtional KB was only studied in the ase where and are L2 projetions. Next, we show that a better result for KB an be obtained on Cartesian
grids for the projetions dened by (3.7) and the numerial uxes dened by (2.11).
To obtain this result, we use the following inverse inequality, whih easily follows from
standard saling arguments.
Lemma 3.4. There exists a positive onstant C depending solely on k and suh that
for all s 2 M N we have
1
ksk0;e ChK 2 ksk0;K
2 T , e being any side of KP.
We set u = uj ; and ku k2s+ 23 ; = 4j=1 ku k2s+ 23 ; j ; where f j g4j=1 denote the sides
of . We are now ready to state our main lemma.
Lemma 3.5. Let u 2 H s+2 (
), s 0, and set q = ru. Assume further that
u 2 W s+1;1 (EN ) if N \
6= ;. Assume C11 to be given by (2.15), and let and be the operators dened by (3.7). Then, for any (r ; w) 2 M N VN , the
approximation property (3.2) holds true, with KB given by
1 1
1 1
KB (q; u) := C [hminfs;kg+1 + 2 hminfs;kg+ 2 2 + 2 hminfs+1;kg+ 2 + 2 ℄kuks+2
1
1
1
1
+C j N \ j 2 hminfs;kg+ 2 k u kW s+1;1(E ) + C hminfs+ 2 ;kg+ 2 ku k 3 ;
for all K
N
s+ 2 ;
where the onstant C depends solely on s, k , and , and where j N \
j denotes
the (d 1){dimensional measure of N \ .
Proof. In order to be able to distinguish the many parts of and failitate the proof
of the above result, we introdue the following notation:
E + := fe : v n > 0g;
E1+ := fe 2 E + j x2 = onstg;
E2+ := fe 2 E + j x1 = onstg;
E
E1
E2
:= fe : v n < 0g;
:= fe 2 E j x2 = onstg;
:= fe 2 E j x1 = onstg;
11
The LDG method on Cartesian grids
and we dene Ei := Ei+ [ Ei ; these boundaries are indiated in Figure 3.1.
We set q := q q and u := u u, write
jA(r; v; q ; u )j ja(r; q )j + jb(v; q )j + jb(u ; r)j + j(u ; v)j =: T1 + T2 + T3 + T4;
and estimate eah of the forms separately.
a. Estimate of T1. From Lemma 3.2, we have
X Z
T1 = K 2T K
r q dx C j (r; v) jA
X
krk20;K
1 X
2
K 2T
K 2T
1
2 minfs;kg+2
kqk2s+1;K 2 :
hK
X
K 2T
kq k20;K
1
2
b. Estimate of T2 . We an write
T2 =
X Z
K 2T K
+
X Z
e2EI e
rv q d x
[ v℄ (ffq gg C 12 [ q ℄ ) ds +
X Z
e2ED e
v q n ds:
Taking into aount the denition of the uxes in (2.11) and of the projetion in
(3.4) and (3.5), we onlude that
Z
ZK
e
Z
rv q dx = 0; 8K 2 T ;
e
v q n ds = 0; 8e 2 E ;
[ v℄ (ffq gg C 12 [ q ℄ ) ds = 0; 8e 2 EI :
Consequently,
T2 =
X
Z
e2E + \ED e
v q n ds:
1
Multiplying and dividing eah term of the sum by C112 , and using the approximation
properties of in Lemma 3.2, we have
T2 = X
Z
e2E + \ED e
v q n ds C j (r; v) jA 1
X
e2E + \ED
X
e2E + \ED
C11 kvk20;e
1 2
2 minfs;kg+1 kqk2s+1;Ke
hK
e
X
e2E + \ED
1
2
C111 kq k20;e
1
2
:
Note that we have used the shape-regularity assumption (2.12) to bound C111 by
C 1 hKe .
12
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
. Estimate of T4. We have
T4 =
X Z
C11 [ v℄
e
e2EI
X
e2EI
[ u ℄ ds +
C11 k[ v℄ k20;e +
C j(r ; v)jA
X
e2ED
X Z
e2ED
C11 v u ds
e
C11 kvk20;e
1
2
X
1
2 2
X X
e2EI
C11 k[ u ℄ k20;e +
X
e2ED
C11 ku k20;e
1
2
C11 ku k0;e
K 2T eK
1
X
C j(r ; v)jA h2Kminfs+1;kg+1+ kuk2s+2;K 2
K 2T
1
C j(r; v)jA h2 minfs+1;kg+1+ kuk2s+2 2 :
d. Estimate of T3.
This estimate annot be obtained as easily as the previous
ones sine it is here that the key idea introdued by LeSaint and Raviart [8℄ has to
be suitably applied. We start by writing
T3 =
X Z
=
X Z
K 2T K
K 2T K
X Z
u r r dx
e2EI e
X Z
eK e
e2EI
K 2T
e2EN e
(ffu gg + C 12 [ u ℄ )[[r℄ ds
X X Z
u r r dx
u r n ds:
X Z
e2EN e
u r n ds
(ffu gg + C 12 [ u ℄ )r nK ds
Again with (2.11) and the notation in Figure 3.1, we see that the ontribution of an
interior element K to this expression is
ZK (r; u) :=
Z
K
Z
u r r dx
1+ [2+
u r nK ds
Z
1 [2
uout r nK ds;
where the supersript \out" denotes the traes taken from outside K . Sine uout
ji =
+
+
uj and [u℄out
ji = i (uji ) for the orresponding one-dimensional projetion i ,
i
this ontribution an be written as
ZK (r; u) =
Z
2+
(u
Z
(u + u) r r dx
K
2+ u) r nK ds
Z
1
Z
1+
(u
(u 1+ u) r nK ds
1+ u)r nK ds
Z
2
(3.14)
(u 2+ u)r nK ds:
13
The LDG method on Cartesian grids
For boundary elements, we add and subtrat orresponding terms to obtain
X
T3 K 2T
XZ
ZK (r; u) + e
1+ u ) r n ds
(u
e2E1
X Z
+
+
(u 2 u ) r n ds +
u r n ds
e2E2 e
e2EN e
Z
X
X
jZK (r; u)j +
j(u 1+ u ) r nj ds
e
K 2T
e2E1 n(EN \E )
XZ
+
X
Z
e2E2 n(EN \E ) e
j(u
1+ u ) r nj ds +
X
Z
e2EN \E
e
ju r n jds
with ZK (r; u) dened in (3.14).
We start by bounding the ontributions to T3 stemming from a boundary edge ei 2 Ei n
(EN \ E ) parallel to the xi -axis, i = 1; 2. Sine u 2 H s+2 (
) implies u 2 H s+ 23 (ei ),
by Lemma 3.2 and the inverse inequality in Lemma 3.4, we get
Z
ei
i u ) r nj ds ku
j(u
i u
k0;ei krk0;ei
ChKminei fs+ 2 ;kg+ 2 ku ks+ 23 ;ei krk0;Kei :
1
1
Here, Kei denotes again the element ontaining the edge ei . Consequently, the global
ontribution to T3 of the boundary edges belonging to Ei n (EN \ E ) an be bounded
by
X
minfs+ 21 ;kg+ 21
ku ks+ 32 ;e krk0;Ke
ChK
e
e2(E1 [E2 )n(EN \E )
X
1 X
1
2
2
2 minfs+ 21 ;kg+1
2 3
2
k
u
k
C
hK
k
r
k
0;Ke
s+ 2 ;e
e
e
e
1
X
ku k2s+ 23 ;e 2 j (r; v) jA
Chminfs+ 12 ;kg+ 21
e
1 ;kg+ 1
min
f
s
+
2
2 ku k 3 j (r ; v ) jA :
Ch
s+ 2 ;
For the edges e in EN \E , we have to use a dierent argument. Thus, by Lemma 3.4,
we have
Z
e
ju r nj ds k u kL1(e) k r n kL1 (e)
1
C jej 21 hKe2 k u kL1(e) k r k0;Ke :
Hene, by the Cauhy-Shwarz inequality,
X
Z
and so
X
e2EN \E
Z
e
1
2
hKe k u kL1(e)
!
k r k0 ;
ju r n jds C j
N\
j
ju r n jds C j
N\
j 12 hminfs;kg+ 12 k u kW s+1;1(EN ) j(r; v)jA :
e
e2EN \E
1
2
sup
e2EN \E
14
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
Finally, we estimate ZK (r; u) by using the following superonvergene result, essentially due to LeSaint and Raviart [8℄, whose proof is postponed to subsetion 3.4.
Lemma 3.6. Let ZK (r ; u) be dened by (3.14). Then we have for s 0
jZ (r; u)j C hminfs;kg+1 kuk
krk :
K
s+2;K
K
0;K
The onstant C depends only on s, k , and .
By ombining the result of Lemma 3.6 with the above estimates of the ontribution
of boundary edges, we obtain
1
1
T3 C j(r; v)jA hminfs;kg+1 kuks+2 + hminfs+ 2 ;kg+ 2 ku ks+ 32 ;
1
1
+j N \ j 2 hminfs;kg+ 2 k u kW s+1;1(E ) :
N
Conlusion. The result in Lemma 3.5 now follows by simply gathering the estimates
for Ti , i = 1; 2; 3; 4, obtained above. This ompletes the proof.
3.4. Proof of Lemma 3.6. Writing r = (r1 ; r2 ), we have
ZK (r; u) = ZK;1 (r1 ; u) + ZK;2 (r2 ; u);
where
ZK;1 (r1 ; u) =
Z
K
+
and
ZK;2 (r2 ; u) =
Z
2
Z
K
+
(u + u)
1
Z
2+
(u 2+ u) r1 dx2
(u 2+ u) r1 dx2
r
+ u) 2
x2
(u
Z
r1
dx dx
x1 1 2
dx1 dx2
Z
1+
(u 1+ u) r2 dx1
(u 1+ u) r2 dx1 :
The proof of the approximation results for ZK;1 and ZK;2 are analogous; therefore,
we just present the one for ZK;1 , essentially following the same arguments as in [8℄.
First, we onsider ZK;1 on the referene square ( 1; 1)2 . We laim that
ZK;1 (r1 ; u) = 0
8u 2 P k+1 (K ); r1 2 Qk (K ):
(3.15)
To prove (3.15), x r1 2 Qk (K ). Sine + and + are polynomial preserving operators, (3.15) holds true for every u 2 Qk (K ). Therefore, we just have to onsider the
ases u(x1 ; x2 ) = xk1+1 and u(x1 ; x2 ) = xk2+1 .
Let us start with u(x1 ; x2 ) = xk1+1 . On 2+ we have u = 2+ u = 1, and on 2 we have
r
u = 2+ u = ( 1)k+1 . Sine 1 is a polynomial of degree at most k 1 in x1 , we
x1
obtain
Z
Z
r
r
(u + u) 1 dx1 dx2 = (u 1+ u) 1 dx1 dx2 = 0:
x1
x1
K
K
Thus, ZK;1 (r1 ; u) = 0 for u(x1 ; x2 ) = xk1+1 .
The LDG method on Cartesian grids
15
In the ase u(x1 ; x2 ) = xk2+1 , we integrate by parts and obtain
Z
K
(u + u)
+
Z
2+
(u
r1
dx dx =
x1 1 2
2+ u)r1 dx1
Z
Z
(u + u)
r1 dx1 dx2
x1
K
(u + u)r1 dx2 :
2
(u + u)
Sine
= 0 and + uj = 2+ uj due to the speial form of u, we onlude
x1
2
2
that ZK;1 (r1 ; u) = 0 also for u(x1 ; x2 ) = xk2+1 . This ompletes the proof of (3.15).
For xed r1 2 Qk (K ), the linear funtional u 7! ZK;1 (r1 ; u) is ontinuous on H s+2 (K )
with norm bounded by C kr1 k0;K . Due to (3.15), it vanishes over P s+1 (K ) for 0 s k. Hene, by applying the Bramble-Hilbert lemma (see [6, Lemma 6℄, for instane),
we obtain for u 2 H s+2 (K ) that
jZK;1 (r1 ; u)j C jujs+2;K kr1 k0;K :
This proves the assertion on the referene element ( 1; 1)2. The general ase follows
from a standard saling argument.
3.5. Proof of Theorem 2.1. If the exat solution of our model problem, (q; u),
belongs to H k+1 (
)2 H k+2 (
), with k 0, and if u 2 W k+1;1 (EN ) in the ase
where N \ 6= ;, Lemmas 3.3 and 3.5 give
KA (q; u; q; u) Ch2k+1+ kuk2k+2 ;
and
j j
KB (q; u) Chk+ 2 2 kukk+2 + Chk+ 2 ku kk+ 32 ;
1
1
+C j N \ j 2 hk+ 2 k u kW k+1;1(EN )
1
1
with u = uj . The estimate of the error j (q qN ; u uN ) jA now follows from
Lemma 3.1. Notie that = 0 gives the best order of onvergene in h equal to k + 21 .
Our assumptions on the domain imply that the solution ' of the adjoint problem in
Lemma 3.1 belongs to H 2 (
) and that we have k'k2 C kk0 . Hene, we onlude
that
KA (q ; u; ; ') C
(
hk+1 kukk+2kk0 ;
k 1;
h1+min(0;) kuk2kk0 ; k = 0;
KB (; ') Ch 2
1
j j
2
kk0 :
The estimate of ku uN k0 thus follows from Lemma 3.1. Notie that = 0 gives
again the best order of onvergene in h whih is k + 1.
4. Numerial Experiments. In this setion, we display a series of numerial
experiments showing the omputed orders of onvergene of the LDG method; we
show (i) that the orders given by our theoretial results are sharp, (ii) that they
an deteriorate when the stabilization parameter C11 is not of order one, (iii) that
the exat apture of the boundary onditions indues an unexpeted inrease of 12 in
the order of onvergene of the gradient, and (iv) that the orders of onvergene are
independent of the dimension.
16
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
In all experiments, we estimate the orders of onvergene of the LDG method as
follows. We onsider suessively rened Cartesian grids T` , ` 0, onsisting of 2d `
uniform d-dimensional ubes with orresponding mesh size 2 `+1 ; we present results
in two- and three-spae dimensions. If e(T` ) denotes the error on the `th mesh, then
the numerial order of onvergene is omputed as follows:
log e(eT(T` ` )1 )
;
` 1:
log(0:5)
The results have been obtained with the objet-oriented C++ library deal.II developed by Bangerth and Kanshat [1℄.
4.1. The sharpness of the orders of onvergene of Theorem 2.1. We
onsider the two-dimensional model problem (1.1) on the square = ( 1; 1)2 with
f and boundary onditions hosen in suh a way that the exat solution is given by
u(x1 ; x2 ) = exp(x1 x2 ). We onsider two ases: In the rst, we impose inhomogeneous
Dirihlet boundary onditions on the whole boundary, and in the seond, we also impose inhomogeneous Neumann boundary onditions on the edge f 1g ( 1; 1). The
results are ontained in Tables 4.1 and 4.2 where the numerial orders of onvergene
in the L2 - and L1 -norm in u and q = (q1 ; q2 ) of the LDG method with Qk -elements
for k = 0; : : : ; 3 are shown. We take C11 = 1:0 and the oeÆients C 12 as in (2.11)
with v = (1; 1).
In Table 4.1, we report the results for Dirihlet boundary onditions imposed on the
whole boundary. Note that, beause of the symmetry of the problem, the orders
of onvergene are exatly the same for q1 and q2 . For k = 0, we see the optimal
order of onvergene of 1 in the L2 -norm of the error of both u and q; note that
Theorem 2.1 predits an order of onvergene of 21 only for q. However, for k 1
the L2 -rates are of order k + 1 in u and k + 12 in q, in full agreement with Theorem
2.1. The orders of onvergene in the L1-norm of the error in u and q appear to be
k + 1 and k, respetively. The results displayed in Table 4.2 are those for the ase of
inhomogeneous Neumann boundary onditions on part of the boundary. We see that
the orders of onvergene in this ase are the same as the ones in the pure Dirihlet
ase.
If C 12 is not hosen as in (2.11), the orders k +1 and k + 12 are not neessarily obtained.
This is demonstrated in Table 4.3, where we plot the onvergene rates for the above
problem with N 6= ;. We hose C 12 = (0; 0) and C11 = 1 and show the performane
p
for Q3 {elements. The obtained L2 -orders are k + 12 and k, representing a loss of h.
It also worth remarking here that the numerial results in Table 4.3 indiate, in fat,
that the rates k + 12 and k proven in [3℄ for C11 = 1 and C 12 arbitrary, but of order
one, are sharp.
Thus, the above experiments show that the orders of onvergene given by Theorem
2.1 are sharp and that the appropriate hoie of C 12 is indeed neessary for this result
to hold.
In the following examples we thus always take C 12 as in (2.11).
4.2. The eet of the hoie of C11. Next, we test the eet of the hoie
of the oeÆients C11 on the orders of onvergene of the LDG method. We onsider
the same problem as in the previous experiments, ase N = ;, and use Q1 { and
Q2 {elements. We only show the numerial orders of onvergene for the nest grids.
The results are displayed in Tables 4.4 and 4.5. We must ompare all these results
with those with C11 = 1 obtained in the rst set of experiments. We see that when
17
The LDG method on Cartesian grids
Table 4.1
Orders of onvergene for the LDG method with C11 = 1:0:
element `
1
2
Q0 3
4
5
6
1
2
Q1 3
4
5
6
1
2
Q2 3
4
5
6
1
2
Q3 3
4
5
6
L2
0.5043
0.7974
0.9975
1.0095
0.9736
0.9683
1.7570
1.7999
1.8496
1.8941
1.9390
1.9681
2.7300
2.8570
2.8676
2.8999
2.9382
2.9661
3.6933
3.8108
3.8660
3.9120
3.9490
3.9661
u
L1
0.1284
0.3682
0.6029
0.7873
0.9019
0.9624
0.9753
1.3976
1.6995
1.8549
1.9305
1.8971
1.9615
2.5254
2.7695
2.8862
2.9428
2.8316
2.9236
3.5453
3.7719
3.8827
3.9398
3.8249
N
= ;.
q1 and q2
L2
L1
0.7401 0.3036
0.7257 0.4175
0.7892 0.4574
0.8803 0.1365
0.9398 0.2937
0.9724 0.3856
1.5354 1.3116
1.2669 0.7766
1.2857 0.7150
1.3640 0.8670
1.4251 0.9422
1.4610 0.9747
2.3151 1.5921
2.3071 1.6811
2.3280 1.8300
2.3901 1.8988
2.4387 1.9392
2.4678 1.9658
3.1730 1.8719
3.2270 2.5280
3.3094 2.7551
3.3859 2.8770
3.4380 2.9415
3.4676 2.9724
C11 is of order h 1 , the order of onvergene in u remains k + 1 but the order of
onvergene in q degrades from k + 12 to only k, as predited by our analysis; see
subsetion 3.5.
We also see that taking C11 = h 1 at the \outow" boundary and C11 of order one
elsewhere only results in a slight redution of the L1 -orders of onvergene.
In the remaining ases, we take C11 to be of order h in all the domain and then in all
but the \outow" boundary where it is taken to be of order h 1 . We observe a slight
degradation of all the orders of onvergene.
These results indiate that the best hoie of the stabilization parameter C11 for the
LDG method on Cartesian grids is to take it of order one, as predited by our analysis.
4.3. Pieewise polynomial boundary onditions. The purpose of these numerial experiments is to show that if the boundary data are pieewise polynomials
of degree k, the order of onvergene of the L2 -norm of the error in q is optimal, that
is, k + 1, and not only k + 21 as predited by Theorem 2.1 and sharp as is shown in
subsetion 4.1.
We onsider two test problems. In the rst, we take homogeneous Dirihlet boundary
onditions and f suh that the exat solution is u(x1 ; x2 ) = os( 2 x1 ) os( 2 x2 ). In the
18
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
Table 4.2
Orders of onvergene of the LDG method with C11 = 1:0:
element `
1
2
Q0 3
4
5
6
1
2
Q1 3
4
5
6
1
2
Q2 3
4
5
6
1
2
Q3 3
4
5
6
L2
0.4279
0.7818
0.9281
0.9589
0.9687
0.9795
1.5640
1.7767
1.8567
1.9167
1.9559
1.9777
2.6095
2.8329
2.8806
2.9230
2.9563
2.9770
3.6125
3.8202
3.8916
3.9375
3.9664
3.9805
u
L1
0.0833
0.3935
0.6447
0.8134
0.9083
0.9555
0.8492
1.4022
1.6995
1.8549
1.9305
1.8971
1.8429
2.5220
2.7695
2.8862
2.9428
2.8316
2.8600
3.5475
3.7719
3.8827
3.9398
3.8264
Q3 {elements with
`
1
2
3
4
5
6
L2
3.5386
3.5382
3.5164
3.5540
3.6003
3.6322
u
L1
2.9273
3.4400
3.3338
3.3287
3.3161
3.2542
L2
0.5632
0.6860
0.9021
1.0231
1.0463
1.0303
1.4414
1.4194
1.4695
1.5024
1.5117
1.5097
2.4038
2.4372
2.4719
2.4963
2.5042
2.5044
3.3206
3.3839
3.4665
3.4950
3.5022
3.5024
q1
L1
0.1687
0.2553
0.4920
0.7055
0.8479
0.9283
0.8857
1.1787
1.1444
0.8670
0.9422
0.9747
1.8936
2.1265
1.9471
1.8988
1.9392
1.9658
2.7792
2.9180
2.7551
2.8770
2.9414
2.9722
0.7419
0.7330
0.8168
0.9221
0.9793
0.9954
1.4867
1.3096
1.3162
1.3843
1.4379
1.4683
2.3275
2.3217
2.3803
2.4320
2.4631
2.4806
3.1634
3.2859
3.3743
3.4318
3.4643
3.4815
= 1:0 and C 12 = (0; 0):
L2
2.8119
2.8728
2.9430
2.9633
2.9662
2.9652
q1
L1
2.2386
2.6760
2.8623
2.8890
2.6764
2.7514
L2
6= ;.
q2
L2
Table 4.3
C11
N
L1
0.2817
0.4255
0.5801
0.2833
0.4939
0.6270
1.0768
1.1126
0.7155
0.8669
0.9422
0.9746
1.8386
1.8231
1.8300
1.8988
1.9392
1.9658
2.5820
2.5593
2.7551
2.8770
2.9414
2.9721
6= ;.
N
q2
3.10187
2.95379
2.89531
2.85946
2.84975
2.86963
L1
2.6656
2.4402
2.4346
2.5681
2.6776
2.7515
seond, we take pieewise quadrati Dirihlet boundary onditions and f suh that
the exat solution is u(x1 ; x2 ) = x21 + x22 + os( 2 x1 ) os( 2 x2 ).
The results of the rst problem are reported in Table 4.6 where we an see that the
optimal order of onvergene of k + 1 for the L2 - and L1 -norms of the errors in both
u and q are obtained; the results for k = 0; 1; 2; 3 are displayed.
The results of the seond problem are reported in Table 4.7, where we see that the
The LDG method on Cartesian grids
19
Table 4.4
Orders of onvergene of the LDG method with Q1 {elements.
C11
1=h
`
5
6
1=h on E + 5
1:0 elsewhere 6
h
5
6
+
1=h on E
5
h elsewhere 6
L2
u
1.9607
1.9792
1.9331
1.9646
1.8916
1.8603
1.8837
1.8563
L1
1.9550
1.9057
1.7799
1.7914
1.8810
1.7887
1.8810
1.7887
q1 and q2
L2
L1
1.1409 0.8816
1.1019 0.9366
1.4240 0.8619
1.4605 0.9268
1.4167 0.9405
1.4564 0.9701
1.4157 0.8698
1.4556 0.9319
Table 4.5
Orders of onvergene of the LDG method with Q2 {elements.
C11
1=h
`
5
6
+
1=h on E
5
1:0 elsewhere 6
h
5
6
+
1=h on E
5
h elsewhere 6
L2
2.9555
2.9754
2.9340
2.9634
2.8559
2.8240
2.8505
2.8211
u
L1
2.9541
2.9584
2.8836
2.7424
2.9524
2.5482
2.8642
2.4554
q1 and q2
L2
L1
2.2223 1.8475
2.1685 1.9228
2.4358 1.8828
2.4663 1.9427
2.4350 1.9483
2.4656 1.9742
2.4325 1.8760
2.4643 1.9365
optimal order of onvergene of k + 1 for the L2 - and L1 -norms of the errors in both
u and q are obtained for k 2, as laimed. For k < 2, the order of onvergene in the
L2 -norm of the error in q is k + 12 only, whih is nothing but the order of onvergene
predited by Theorem 2.1.
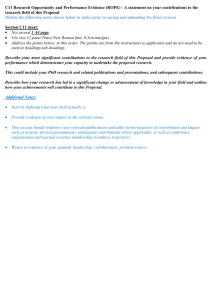
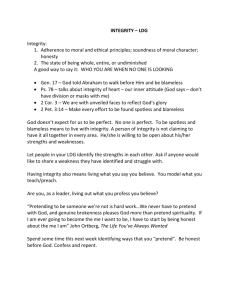
To better understand this phenomenon, we plot the errors in q1 for Q1 { and Q2 {
elements in Figures 4.1 and 4.2, respetively; the triangulation has 16 16 elements
and orresponds to the index ` = 4. We immediately see the osillatory behavior of the
error typial of nite element methods. In Figure 4.1, we see that the error obtained
with Q1 {elements is bigger at the boundary than at the interior. This, together with
the fat that the order of onvergene in L2 is 23 whereas the order of onvergene in
L1 is only 1, suggests that the error at the boundary is a fator of order h 21 bigger
than the error at the interior of the domain. On the other hand, the behavior of the
error with Q2 {elements is rather dierent, as an be seen in Figure 4.2. Indeed, the
error behaves in the same way at the boundary and at the interior; this is further
onrmed by the fat that both the order of onvergene in L2 and the one in L1 are
equal to k + 1. These experiments justify our ontention that the optimal order of
onvergene in q an be reahed if the boundary onditions are pieewise polynomials
of degree k. Our theoretial analysis does not explain this phenomenon.
20
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
Table 4.6
Orders of onvergene for the LDG method with C11 = 1:0:
element `
Q0 5
6
1
Q
5
6
2
Q
5
6
3
Q
5
6
u
L2
0.8913
0.9456
2.0352
2.0213
2.9637
2.9815
4.0435
4.0247
L1
0.9278
0.9658
1.9750
1.9878
3.0266
3.0150
3.9806
3.9918
Table 4.7
element `
Q0 5
6
1
Q
5
6
Q2 5
6
3
Q
5
6
0.9886
0.9935
2.0030
2.0015
2.9637
2.9815
4.0435
4.0245
u
L1
0.9739
1.0066
1.9552
1.9775
3.0266
3.0150
3.9804
3.9909
= 0,
N
= ;.
q1 and q2
L2
L1
0.9299 0.8973
0.9662 0.9483
2.0000 1.9748
2.0003 1.9858
2.9689 3.0292
2.9855 3.0161
4.0087 3.9771
4.0041 3.9748
Orders of onvergene for the LDG method with C11 = 1:0:
L2
gD
gD
quadrati,
q1 and q2
L2
L1
0.7359 0.0052
0.8009 0.0142
1.4906 1.0160
1.4976 1.0091
2.9689 3.0292
2.9855 3.0162
4.0087 3.9762
4.0036 3.9717
N
= ;.
21
The LDG method on Cartesian grids
8e-02
6e-02
4e-02
2e-02
0e+00
-2e-02
-4e-02
-6e-02
-8e-02
1.0
0.5
-1.0
0.0
-0.5
0.0
-0.5
0.5
1.0 -1.0
. The error in the rst omponent of the gradient for Q1 :
Fig. 4.1
gD
quadrati,
N
= ;.
3e-04
2e-04
1e-04
0e+00
-1e-04
-2e-04
-3e-04
1.0
0.5
-1.0
0.0
-0.5
0.0
-0.5
0.5
1.0 -1.0
. The error in the rst omponent of the gradient for Q2 :
Fig. 4.2
gD
quadrati,
N
= ;.
22
B. Cokburn, G. Kanshat, I. Perugia and D. Shotzau
4.4. A three-dimensional example. In this experiment, we onsider the ellipti model problem (1.1) on the three-dimensional domain = ( 1; 1)3. We take
Dirihlet boundary onditions and f suh that the exat solution is
u(x1 ; x2 ; x3 ) = x21 + x22 + x23 + os( x1 ) os( x2 ) os( x3 ):
2
2
2
The results are displayed in Table 4.8; the omputation on level 5 with Q2 {elements
did not t into the omputers available to us. We an see that the orders of onvergene are similar to those obtained in the orresponding two-dimensional test problem
in the previous subsetion; f. Table 4.7. This gives an indiation that the orders of
onvergene of the LDG method in three{spae dimensions behave in the same way
they do in the two-dimensional ase.
Table 4.8
Orders of onvergene for the LDG method with C11 = 1:0 in 3D: gD quadrati,
element `
3
Q0
4
5
3
Q1
4
5
3
Q2
4
5
u
L2
0.9389
0.9367
0.9452
1.8573
1.9278
1.9636
2.9204
2.9326
n/a
N
= ;.
q1 and q2
L2
0.5118
0.6177
0.7203
1.3374
1.4345
1.4723
2.8642
2.9338
n/a
5. Conluding remarks. In this paper we have shown that the LDG method
on Cartesian grids and with a speial numerial ux superonverges; the proof of this
result is based on suitable dened projetions and exhibiting a tensor produt struture. This work extends the orresponding result by LeSaint and Raviart
[8℄ for the DG method for linear hyperboli problems and that by Castillo [2℄ and
Castillo, Cokburn, Shotzau, and Shwab [4℄ for the LDG method applied to the
one-dimensional transient onvetion-diusion. Extensions of this work to more general ellipti and both steady and transient onvetion-diusion problems an easily
be made.
Aknowledgments. We would like to thank the reviewers for their valuable
omments and suggestions.
REFERENCES
[1℄ W. Bangerth and G. Kanshat, Conepts for objet-oriented nite element software { the deal.II
library, Report 99-43, Sonderforshungsbereih 3-59, IWR, Universitat Heidelberg, Heidelberg, Germany, 1999.
[2℄ P. Castillo, An optimal error estimate for the loal disontinuous Galerkin method, Disontinuous
Galerkin Methods: Theory, Computation and Appliations (B. Cokburn, G.E. Karniadakis,
and C.-W. Shu, eds.), Let. Notes Comput. Si. Eng., vol. 11, Springer{Verlag, Heidelberg,
2000, pp. 285{290.
The LDG method on Cartesian grids
23
[3℄ P. Castillo, B. Cokburn, I. Perugia, and D. Shotzau, An a priori error analysis of the loal
disontinuous Galerkin method for ellipti problems, SIAM J. Numer. Anal., to appear.
[4℄ P. Castillo, B. Cokburn, D. Shotzau, and C. Shwab, An optimal a priori error estimate for
the hp-version of the loal disontinuous Galerkin method for onvetion{diusion problems,
Math. Comp., to appear.
[5℄ P.G. Ciarlet, The Finite Element Method for Ellipti Problems, North{Holland, Amsterdam,
1978.
[6℄ P.G. Ciarlet and P.A. Raviart, General Lagrange and Hermite interpolation in Rn with appliations to nite element methods, Arh. Ration. Meh. Anal. 46 (1972), 177{199.
[7℄ B. Cokburn and C.-W. Shu, The loal disontinuous Galerkin method for time{dependent
onvetion{diusion systems, SIAM J. Numer. Anal. 35 (1998), 2440{2463.
[8℄ P. LeSaint and P.A. Raviart, On a nite element method for solving the neutron transport equation, Mathematial Aspets of Finite Elements in Partial Dierential Equations (C. de Boor,
ed.), Aademi Press, New York, 1974, pp. 89{145.
[9℄ D. Shotzau and C. Shwab, Time disretization of paraboli problems by the hp-version of the
disontinuous Galerkin nite element method, SIAM J. Numer. Anal. 38 (2000), 837{875.