An a posteriori error indicator for discontinuous Galerkin discretizations of
advertisement

IMA Journal of Numerical Analysis (2005) Page 1 of 27
doi: 10.1093/imanum/
An a posteriori error indicator for discontinuous Galerkin discretizations
of H(curl)–elliptic partial differential equations
PAUL H OUSTON∗
School of Mathematical Sciences, University of Nottingham, University Park, Nottingham,
NG7 2RD, UK
I LARIA P ERUGIA†
Dipartimento di Matematica, Università di Pavia, Via Ferrata 1, 27100 Pavia, Italy
D OMINIK S CH ÖTZAU‡
Mathematics Department, University of British Columbia, 1984 Mathematics Road,
Vancouver, BC V6T 1Z2, Canada
IMA J. Numer. Anal., Vol. 27, pp. 122-150, 2007
We introduce a residual-based a posteriori error indicator for DG discretizations of H(curl; Ω )–elliptic
boundary value problems that arise in eddy current models. We show that the indicator is both reliable
and efficient with respect to the approximation error measured in terms of a natural energy norm. We
validate the performance of the indicator within an adaptive mesh refinement procedure and show its
asymptotic exactness for a range of test problems.
Keywords:
Discontinuous Galerkin methods, a posteriori error analysis, eddy current problems
1. Introduction
The electric field-based eddy current model for the computation of quasistatic electromagnetic fields
consists of the following initial-boundary value problem: find the electric field E : Ω × (0, T ) → R 3
satisfying
∂t (σ E) + ∇ × (µ −1∇ × E) = ∂t js
n×E = 0
E|t=0 = E0
in Ω × (0, T ),
on Γ × (0, T ),
in Ω ,
cf. (3; 7). Here, Ω is an open bounded Lipschitz polyhedron in R 3 with boundary Γ = ∂ Ω and outward
normal unit vector n. For simplicity, we assume Ω to be simply-connected and Γ to be connected. The
right-hand side js = js (x,t) is a given external source field, with js (·,t) ∈ L2 (Ω )3 and ∇ · js (·,t) ∈ L2 (Ω ),
t ∈ (0, T ). The material coefficients σ and µ are the electric conductivity and the magnetic permeability,
∗ Paul.Houston@nottingham.ac.uk
† ilaria.perugia@unipv.it
‡ schoetzau@math.ubc.ca
IMA Journal of Numerical Analysis c Institute of Mathematics and its Applications 2005; all rights reserved.
2 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
respectively; σ is a symmetric, uniformly positive semidefinite tensor, and µ is a symmetric, uniformly
positive definite tensor, both with bounded coefficients. Assuming σ is uniformly positive definite on
the whole of Ω and that an implicit time discretization is employed, at each time-step, one would need
to solve a boundary value problem of the form
∇ × (µ −1∇ × u) + β u = j
n×u = 0
in Ω ,
on Γ ,
where u is the approximation to E to be computed at the current time-step, j depends on j s and the
approximation to E at the previous time-step, and β depends on σ and the size of the current time-step.
In order to simplify the presentation, we assume from here on that µ and β are equal to the identity
tensor, cf. the discussion presented in (5).
With this discussion in mind, the purpose of this paper is to introduce a residual-based a posteriori
error indicator for interior penalty discontinuous Galerkin (DG) approximations of the following model
problem: find the vector unknown u (electric field) that satisfies
∇×∇×u+u= j
n×u = 0
in Ω ,
(1.1)
on Γ ,
(1.2)
where, for generality, j is a given external source field in L2 (Ω )3 . By introducing the Sobolev space
H0 (curl; Ω ) := { v ∈ L2 (Ω )3 : ∇ × v ∈ L2 (Ω )3 , n × v = 0 on Γ },
the weak form of (1.1)–(1.2) is given by: find u ∈ H0 (curl; Ω ) such that
Z Z
a(u, v) :=
(∇ × u) · (∇ × v) + u · v dx =
j · v dx
Ω
Ω
(1.3)
for all v ∈ H0 (curl; Ω ). The system in (1.1)–(1.2) is the simplest prototype of a partial differential
equation that is elliptic over H0 (curl; Ω ).
The main motivation for using a discontinuous Galerkin approach for the numerical approximation
of (1.1)–(1.2) is that DG methods, being based on discontinuous finite element spaces, can easily handle non-conforming meshes which contain hanging nodes and, in principle, local spaces of different
polynomial orders; for the purposes of the current article, we shall only consider the h-version of the
DG method. Moreover, the implementation of discontinuous elements can be based on standard shape
functions, without the need to employ curl-conforming elemental mappings - a convenience that is particularly advantageous for high-order elements and that is not straightforwardly shared by standard edge
or face elements commonly used in computational electromagnetics (see (8; 32; 1) and the references
therein for hp-adaptive edge element methods). A further benefit of DG methods is that inhomogeneous Dirichlet boundary conditions can easily be incorporated within the scheme, without the need to
explicitly evaluate edge- and face-element interpolation operators.
This paper represents a continuation of the series of articles (31; 30; 16; 17; 20; 19; 14; 15) concerned with the development of DG finite element methods for the numerical approximation of the
time-harmonic Maxwell equations. Indeed, here we have considered the design and analysis of nonconforming DG methods for both low and high frequency approximations of these equations. In the low
frequency regime, both regularized, cf. (30; 16), and mixed, cf. (17; 20; 19), formulations have been
proposed. For the high frequency regime, mixed and so-called direct formulations have been proposed
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
3 of 27
and analyzed; see (31; 15) and (14), respectively. For a recent review of this work, we refer to the
article (18).
With the exception of (19), the aforementioned articles have only considered the derivation of a priori error bounds. In this article we introduce an a posteriori error indicator for the DG approximation
to (1.1)–(1.2) and prove both upper and lower bounds for the actual error measured in terms of a natural
energy norm, thereby, demonstrating that the indicator is both reliable and efficient. We remark that
upper bounds of this type were derived in (19) for the mixed DG approximation of the low frequency
Maxwell’s equations. However, the bounds presented there are somewhat unsatisfactory in the sense
that the error estimators also depend on certain embedding parameters of the computational domain.
The proof of these results relied on employing suitable Helmholtz decompositions of the error, together
with the conservation properties of the underlying DG method; cf. (6), where this approach was first
developed in the context of DG methods employed for the numerical approximation of diffusion problems. In this article we pursue a different technique, inspired by the recent articles (21; 22; 23); see
also (26) for related work. Here, the proof of the upper bound is based on rewriting the method in a nonconsistent manner using lifting operators in the spirit of (4), see also (29), together with approximation
results which allow us to find a conforming finite element function which is close to any discontinuous
one. Approximation results of this latter type have been developed for the h–version of the DG method
in the case when the underlying conforming finite element space is a subspace of H01 (Ω ) in the articles (17; 26); the extension of this result to the hp–DG method was presented in the recent article (23).
In this paper we exploit an analogous result derived in (14) for the h–version of the DG method when
the underlying conforming finite element space is a subspace of H0 (curl; Ω ). With this approximation
result, the proof of the upper a posteriori error bound now rests on estimating the error between the
analytical solution u and a conforming approximant uch . To this end, we exploit the decomposition of
H0 (curl; Ω ) derived in (13, Lemma 2.4), together with approximation results for the standard Clément
interpolant, as well as for the quasi-interpolation operator constructed in (5, Section 5). The proofs of
the lower (efficiency) a posteriori error bounds follow from the standard bubble technique introduced
in (33) and (34).
Finally, we note that the techniques presented here can be readily extended to elliptic problems in
H0 (curl; Ω ) with smooth coefficients. However, the extension to problems with non-smooth coefficients
remains an open issue. The reason for this is that for non-smooth coefficients the decomposition in (13,
Lemma 2.4) is no longer applicable; the same problem also arises in the analysis of conforming methods,
cf. (5).
Before we proceed, we first introduce some notation: given a bounded domain D in R d , d > 1, we
write H t (D) to denote the usual Sobolev space of real-valued functions with regularity exponent t and
norm k · kt,D ; for t = 0, we write L2 (D) instead of H 0 (D). The space H t (D)d consists of vector fields
whose components belong to H t (D); it is endowed with the usual product norm which we denote, for
simplicity, also by k · kt,D . For D ⊂ R3 , we write H(curl; D) and H(div; D) to denote the spaces of vector
fields u ∈ L2 (D)3 with ∇ × u ∈ L2 (D)3 and ∇ · u ∈ L2 (D), respectively, endowed with their corresponding graph norms k · kcurl and k · kdiv , respectively. Finally, we denote by H01 (D) and H0 (curl; D) the
subspaces of H 1 (D) and H(curl; D), respectively, of functions with zero trace and zero tangential trace,
respectively.
2. Discontinuous Galerkin discretization
In this section, we consider the interior penalty DG discretization of (1.1)–(1.2). To this end, we first
introduce the following notation.
4 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
Let Th be a conforming, shape-regular and affine tetrahedral partition of Ω of granularity h =
maxK∈Th hK , where the local mesh size hK is defined to be the diameter of the element K ∈ Th . We
denote by Fh the set of all faces of elements in Th . For an approximation order ` > 1, we introduce the
following finite element space
Vh := {v ∈ L2 (Ω )3 : v|K ∈ P ` (K)3 , K ∈ Th },
(2.1)
where
denotes the space of polynomials of total degree at most ` on K. With this notation, we
consider the following interior penalty DG method: find uh ∈ Vh such that
P ` (K)
ah (uh , v) =
Z
Ω
j · v dx
(2.2)
for all v ∈ Vh . The discrete form ah (·, ·) is given by
Z (∇ × u) · (∇ × v) + u · v dx −
ah (u, v) := ∑
K∈Th K
−
∑
Z
F∈Fh F
[[v]]T · {{∇ × u}} ds +
Z
∑
F∈Fh F
∑
Z
F∈Fh F
[[u]]T · {{∇ × v}} ds
a[[u]]T · [[v]]T ds.
(2.3)
For a piecewise smooth function v, on interior faces, we write [[v]]T and {{v}} to denote the tangential
jump and mean value of the vector field v, respectively. On boundary faces we set [[v]] T = n × v and
{{v}} = v; cf. (16) or (14). The function a penalizes the tangential jumps; it is referred to as the interior
penalty stabilization function. On a given face F it is defined by
a|F := α h−1
F ,
(2.4)
with hF denoting the diameter of face F and α being a positive constant that is independent of the mesh
size. It is well-known that (2.2) is uniquely solvable, provided that α > α min , for a threshold value
αmin that only depends on the shape-regularity of the mesh and the approximation order `, cf. (17), for
example.
R EMARK 2.1 The well-posedness of (2.2) is guaranteed provided that α > Cinv , where Cinv is the
constant arising in the inverse estimate
2
kwk20,∂ K 6 Cinv h−1
K kwk0,K
∀w ∈ P ` (K),
see, e.g., (30); see also (4). The constant Cinv depends only on the polynomial degree ` and the shaperegularity of the mesh (see, e.g., (24)). Indeed for square elements, by solving a local generalized
0 `2 , where C 0 = (1 + 3/` + 2/`2) 6 6 for all ` > 1;
eigenvalue problem, it can be shown that Cinv = Cinv
inv
0
2
thereby, in this case we may set α = Cinv ` , or indeed α = 6`2 . In general, for other element types, and
indeed, for hybrid meshes, on the basis of the articles (16; 23), in Section 6 we actually set α = CIP `2 ,
with CIP = 10, the value of the constant CIP being chosen empirically, based on extensive numerical
experimentation; see the discussion at beginning of Section 6 for further details.
R EMARK 2.2 In order to incorporate the inhomogeneous Dirichlet boundary condition n × u = g on Γ ,
g in L2 (Γ )3 , within the above formulation, it is sufficient to simply add the following terms to the
functional on the right-hand side of (2.2)
−
∑
F∈FhB
Z
F
g · (∇ × v) ds +
∑
F∈FhB
Z
F
a g · (n × v) ds,
where FhB denotes the set of all faces of elements in Th which lie on the boundary Γ of Ω .
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
5 of 27
3. A posteriori error indicator
In this section, we present a reliable and efficient indicator for the error of the DG approximation measured in terms of a natural energy norm.
3.1 Local a posteriori error indicators
We begin by introducing local error indicators. To do so, we introduce on each element K ∈ T h the
indicator ηK which is given by the sum of the following five terms
ηK2 = ηR2K + ηD2 K + ηT2K + ηN2K + ηJ2K .
(3.1)
The first term ηRK measures the residual of the underlying system of partial differential equations and
is defined by
(3.2)
ηR2K = h2K kjh − ∇ × ∇ × uh − uh k20,K ,
where jh ∈ Vh denotes an appropriate approximation to j; we refer to Remark 3.2 concerning the choice
of jh . The second term ηDK measures the error in the divergence and is given by
ηD2 K = h2K k∇ · (jh − uh )k20,K .
(3.3)
The third term ηTK is the usual face residual related to the tangential jump of ∇ × uh :
ηT2K =
1
hK k[[∇ × uh]]T k20,F .
2 F∈∑
∂ K\Γ
(3.4)
The fourth term ηNK measures the normal jump [[jh − uh ]]N of jh − uh over interior faces, that is,
ηN2K =
1
hK k[[jh − uh ]]N k20,F .
2 F∈∑
∂ K\Γ
(3.5)
The last term ηJK measures the tangential jumps of the approximate solution uh and is defined by
ηJ2K =
1
1
1
ka 2 [[uh ]]T k20,F + ∑ ka 2 (n × uh )k20,F .
2 F∈∑
∂ K\Γ
F∈∂ K∩Γ
(3.6)
3.2 Reliability
We now state and discuss the fact that the error indicator
ERR :=
∑
K∈Th
ηK2
!1
2
(3.7)
provides a reliable upper bound on the approximation error with respect to an energy-type norm. To do
so, we introduce the space V(h) := H0 (curl; Ω ) + Vh , and define the following norm:
kvk2DG := kvk20,Ω +
∑
K∈Th
k∇ × vk20,K +
∑
F∈Fh
1
ka 2 [[v]]T k20,F .
We remark that k·kDG represents the natural energy norm arising from the definition of the DG bilinear
form ah (·, ·) given in (2.3). While this norm does indeed depend on the interior penalty stabilization
parameter α , cf. (2.4), the value of α is fixed, for a given polynomial degree, and is independent of the
mesh size h.
6 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
T HEOREM 3.1 Let u be the analytical solution of (1.1)–(1.2), with j ∈ L 2 (Ω )3 , and uh ∈ Vh its DG
approximation obtained by (2.2) with α > αmin . Let the local error indicators be defined by (3.1)–(3.6).
Then, the following upper bound for the error holds
ku − uhkDG 6 CEST
∑
K∈Th
ηK2
!1/2
+CAPPA (j − jh),
(3.8)
where CEST and CAPP are positive constants; here, CEST is independent of the mesh size and CAPP is
independent of the mesh size and α . If α > max{1, αmin } then CEST may also be bounded independently
of α . Further, A (j − jh) is the data approximation term given by
A (j − jh) = kj − jhk0,Ω .
R EMARK 3.1 From the proof of Theorem 3.1, it follows that
CEST =
√
1
−1
2Cdec max{Cc ,Cq max{1, α − 2 Clift2 }} + (1 +Ccont) 2α −1Cconf + 1
and
12
CAPP = 2Cdec max{Cc ,Cq },
where Cdec is the constant arising in the stability bounds stated in (4.8), Cq and Cc are the interpolation
constants in (4.9) and (4.10), respectively, α is the constant arising in the definition of the interior penalty
stabilization function (2.4), Clift is the constant in (4.3), Ccont is the continuity constants in Lemma 4.2
and Cconf is the constant arising in the approximation result stated in Proposition 4.1.
R EMARK 3.2 We note that Theorem 3.1 holds for any jh ∈ Vh . To ensure that the data approximation
term A (j − jh ) does not dominate the overall a posteriori error bound stated in (3.8), j h should be chosen
in such a manner so that (asymptotically) A (j − jh) tends to zero at, at least, the same rate as the first
term on the right-hand side of (3.8) (and thereby also at, at least, the same rate as ku − u h kDG , cf.
Theorem 3.3 in the following section) as the mesh is refined for a given polynomial degree `. This can
be achieved, for example, by choosing jh to be the L2 -projection of j onto the space Vh .
R EMARK 3.3 In the case where the external source field j belongs to H(div; Ω ) (for example, in many
eddy current problems, j is actually solenoidal), then an upper bound for the error analogous to the one
stated in Theorem 3.1 may be derived with the data approximation term defined by
A (j − jh)2 = ∑ h2K kj − jhk20,K + k∇ · (j − jh)k20,K .
K∈Th
In this case the normal jump error indicator ηNK is defined as
ηN2K =
1
hK k[[uh ]]N k20,F ,
2 F∈∑
∂ K\Γ
which now reflects the fact that the normal components of j across the element faces are continuous.
R EMARK 3.4 The case of imposing the inhomogeneous boundary condition n × u = g on Γ may also
be incorporated within the above error bound. Indeed, in the case when g is the tangential trace of a
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
7 of 27
function belonging to Vh ∩ H 1 (Ω )3 , the error indicator is simply modified by redefining the tangential
jump indicator ηJK as follows:
ηJ2K =
1
1
1
ka 2 [[uh ]]T k20,F + ∑ ka 2 (n × uh − g)k20,F .
2 F∈∑
∂ K\Γ
F∈∂ K∩Γ
For general g ∈ L2 (Γ )3 , a data error term which takes into account the error in the finite element approximation of the boundary datum must be included within the a posteriori error bound.
3.3 Efficiency
Next, we discuss the efficiency of all the terms that constitute the local error indicators η K .
P ROPOSITION 3.2 Let u be the analytical solution of (1.1)–(1.2) and u h ∈ Vh its DG approximation
obtained by (2.2) with α > αmin . Let the local error indicators be defined by (3.1)–(3.6). Then, the
following local bounds hold.
(i) For any element K ∈ Th , we have
ηRK 6 C (k∇ × (u − uh) k0,K + hK ku − uhk0,K + hK kj − jhk0,K ) ,
with a constant C > 0 that is independent of the mesh size and α .
(ii) For any element K ∈ Th , we have
ηDK 6 C (ku − uhk0,K + kj − jhk0,K ) ,
with a constant C > 0 that is independent of the mesh size and α .
(iii) For any interior face F shared by two elements K and K 0 , we have
1
hF2 k[[∇ × uh]]T k0,F 6 C
k∇ × (u − uh)k0,K + hK ku − uhk0,K + hK kj − jhk0,K ,
∑
K∈δF
with a constant C > 0 that is independent of the mesh size and α ; here, we have set δ F = {K, K 0 }.
(iv) For any interior face F shared by two elements K and K 0 , we have
1
hF2 k[[jh − uh ]]N k0,F 6 C ∑ ku − uhk0,K + kj − jhk0,K ,
K∈δF
with a constant C > 0 that is independent of the mesh size and α ; again, δ F = {K, K 0 }.
(v) For interior faces F, we have
1
1
ka 2 [[uh ]]T k0,F = ka 2 [[u − uh ]]T k0,F ,
and for boundary faces F,
1
1
ka 2 (n × uh )k0,F = ka 2 (n × (u − uh )) k0,F .
(3.9)
8 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
The proof of Proposition 3.2 is given in Section 5. An immediate consequence of Proposition 3.2 is
the following result.
T HEOREM 3.3 Let u be the analytical solution of (1.1)–(1.2), with j ∈ L 2 (Ω )3 , and uh ∈ Vh its DG
approximation obtained by (2.2) with α > αmin . Let the local error indicators be defined by (3.1)–(3.6).
Then our proposed error indicator ERR in (3.7) is efficient in the sense that
ERR 6 CEFF ku − uhkDG + A (j − jh) ,
where CEFF is a positive constant independent of the mesh size and α .
R EMARK 3.5 In the case when j ∈ H(div; Ω ), analogous efficiency bounds may also be derived. Indeed,
bounds (i), (iii), and (v) in Proposition 3.2 remain unchanged; on the right-hand side of the bounds in
(ii) and (iv), the term kj − jh k0,K may be replaced by hK k∇ · (j − jh )k0,K . In the case of the latter bound,
the term on the left-hand side of the inequality in (3.9) must also be modified in light of the change
in the definition of the normal jump indicator ηNK outlined in Remark 3.3; by this we mean that the
1
1
term hF2 k[[jh − uh ]]N k0,F must be replaced by hF2 k[[uh ]]N k0,F . Thereby, with the modified definition of
the data approximation term stated in Remark 3.3, an analogous efficiency bound to the one stated in
Theorem 3.3 holds.
R EMARK 3.6 We point out that the constants CEST and CAPP arising in Theorem 3.1, and CEFF defined
in Theorem 3.3, are all independent of the constant α arising in the definition of the interior penalty
parameter a, which indicates that the resulting bounds are relatively insensitive to changes in α . Indeed,
numerical experiments presented in the articles (22; 23) confirm this assertion in the context of both
nearly–incompressible linear elasticity and Poisson’s equation, respectively.
R EMARK 3.7 We note that the emphasis of this article is the design of an a posteriori error indicator for
the h–version (only) of the interior penalty DG approximation of the H(curl)–elliptic problem (1.1)–
(1.2). Thereby, it is natural that the constants CEST and CAPP arising in Theorem 3.1, and CEFF defined
in Theorem 3.3, should all depend on the polynomial degree `; indeed, this is evidenced in Section
6. The extension of the analysis to the hp–version of the finite element method, whereby all constants
would then indeed be independent of both h and ` forms part of our programme of future research. We
remark that one of the key technical difficulties in our setting is the derivation of the hp–version of
Proposition 4.1; this has been undertaken in article (23) for subspaces of H 1 (Ω ) only.
4. Proof of Theorem 3.1
In this section we carry out the proof of Theorem 3.1. To this end, in Section 4.1 we present an approximation property for DG functions. Section 4.2 is devoted to augmenting the form a h to the space
V(h). After these preliminary considerations, we conclude the proof of Theorem 3.1 in Sections 4.3, 4.4
and 4.5.
4.1 Approximation by conforming finite element functions
One of the main ingredients in our error analysis is an approximation property that allows us to find
a conforming finite element function close to any discontinuous one; see (20) and (14) where similar
ideas are used in the a priori error analysis of DG methods for Maxwell’s equations. We also refer
to (26) and (23) where results of that type have been instrumental in deriving a posteriori bounds for DG
discretizations of diffusion problems.
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
9 of 27
To this end, we first define Vch to be the largest conforming space underlying Vh , that is,
Vch := Vh ∩ H0 (curl; Ω ).
(4.1)
In fact, Vch is the finite element space based on the second family of Nédélec’s elements of degree `;
see (28) or (27, Section 8.2).
We will make use of the following approximation property that is similar to the results in (14).
P ROPOSITION 4.1 Let v ∈ Vh . Then there is a function vc ∈ Vch such that
kv − vck2DG
6
2α −1Cconf + 1
∑
F∈Fh
1
ka 2 [[v]]T k20,F ,
with a constant Cconf > 0 that only depends on the shape-regularity of the mesh and the approximation
order.
Proof. This follows from the construction in (14, Appendix): for v ∈ V h there is an conforming
approximation vc ∈ Vch such that
∑
K∈Th
k∇ × (v − vch)k20,K 6 Cconf
and
kv − vck20,Ω 6 Cconf
∑
∑
F∈Fh
2
h−1
F k[[v]]T k0,F
hF k[[v]]T k20,F ,
F∈Fh
with a constant Cconf > 0 that only depends on the shape-regularity of the mesh and the approximation
order `. The approximation result then follows readily from the definition of a in (2.4).
4.2 Auxiliary formulation
Following the a priori and a posteriori analyses of (29) and (23), respectively, we will augment the
bilinear form ah in (2.2) to V(h) × V(h) in a non-consistent manner. To this end, we define for v ∈ V(h)
the lifting L (v) ∈ Vh by
Z
Ω
L (v) · w dx =
∑
Z
F∈Fh F
∀w ∈ Vh .
[[v]]T · {{w}} ds
(4.2)
Then there is a constant Clift > 0 only depending on the shape-regularity of the mesh and the approximation degree ` such that
kL (v)k20,Ω 6 α −1Clift
∑
1
F∈Fh
ka 2 [[v]]T k20,F .
(4.3)
We then introduce the auxiliary bilinear form
aeh (u, v) :=
∑
Z K∈Th K
−
∑
Z
K∈Th K
(∇ × u) · (∇ × v) + u · v dx −
L (v) · (∇ × u) dx +
∑
Z
F∈Fh F
∑
Z
K∈Th K
L (u) · (∇ × v) dx
a [[u]]T · [[v]]T ds.
10 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
Note that aeh = ah on Vh × Vh and aeh = a on H0 (curl; Ω ) × H0 (curl; Ω ); hence the form aeh can be viewed
as an extension of both a and ah to the space V(h). The discrete problem (2.2) can then be equivalently
stated as follows: find uh ∈ Vh such that
aeh (uh , v) =
Z
Ω
j · v dx
∀v ∈ Vh .
(4.4)
Since aeh = a on H0 (curl; Ω ) × H0 (curl; Ω ), the following stability result holds.
L EMMA 4.1 We have
aeh (v, v) = kvk2curl = kvk2DG
for all v ∈ H0 (curl; Ω ).
Moreover, the bilinear form aeh is continuous on V(h); we refer to (4; 16; 31) for details.
L EMMA 4.2 For any u, v ∈ V(h), we have
|e
ah (u, v)| 6 Ccont kukDG kvkDG ,
where Ccont = max{2, 1 + α −1Clift }, α is the constant arising in the definition of the interior penalty
stabilization function (2.4) and Clift is the constant arising in (4.3).
4.3 A preliminary upper bound
We decompose the error between the analytical solution u and the DG approximation u h ∈ Vh as follows
u − uh = (u − uch ) − (uh − uch ),
where uch ∈ Vch is the conforming approximation of uh from Proposition 4.1.
L EMMA 4.3 The following upper bound for the error holds
ku − uh kDG 6
sup
w∈H0 (curl;Ω )
R(w) + (1 +Ccont) kuh − uch kDG ,
where Ccont is the continuity constant from Lemma 4.2 and R(·) is defined by
R(w) = inf
wh ∈Vh
Z
Ω
j · (w − wh) dx − aeh (uh , w − wh )
kwkDG
∀w ∈ H0 (curl; Ω ).
Proof. By application of the triangle inequality we obtain
ku − uh kDG 6 ku − uch kDG + kuh − uch kDG .
(4.5)
In order to bound ku − uch kDG , we set w := u − uch ∈ H0 (curl; Ω ) and exploit the coercivity property
stated in Lemma 4.1; thereby, we get
kwk2DG = aeh (w, w) = aeh (u, w) − aeh (uh , w) + aeh(uh − uch , w).
Since w ∈ H0 (curl; Ω ), we have
aeh (u, w) = a(u, w) =
Z
Ω
j · w dx.
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
From (4.4), we get
This allows us to conclude that
kwk2DG
=
aeh (uh , wh ) =
Z
Ω
Z
Ω
j · wh dx
11 of 27
∀wh ∈ Vh .
j · (w − wh) dx − aeh(uh , w − wh ) + aeh(uh − uch , w)
for any wh ∈ Vh . The continuity of aeh (·, ·) from Lemma 4.2 yields the bound
kwk2DG 6
Z
Ω
for any wh ∈ Vh . Therefore,
j · (w − wh) dx − aeh(uh , w − wh ) +Ccont kuh − uch kDG kwkDG
ku − uchkDG 6 R(u − uch ) +Ccont kuh − uch kDG .
Observing that R(u − uch ) 6 supw∈H0 (curl;Ω ) R(w) and referring to the triangle inequality in (4.5) completes the proof.
Let us remark that, in Lemma 4.3, the term kuh − uch kDG can be bounded in terms of the jumps of
the discrete solution, due to Proposition 4.1. Thereby, we deduce that
1
kuh − uch k2DG 6 2α −1Cconf + 1 ∑ ka 2 [[uh ]]T k20,F = 2α −1Cconf + 1 ∑ ηJ2K ,
(4.6)
F∈Fh
K∈Th
where ηJK is the jump residual defined in (3.6). In the following section, we now derive a computable
upper bound for R(w).
4.4 Bound of R(w)
To bound the term R(w), we will use the regular decomposition from (13, Lemma 2.4): any w ∈
H0 (curl; Ω ) can be written as
w = w0 + ∇ϕ ,
(4.7)
with w0 ∈ H0 (curl; Ω ) ∩ H 1 (Ω )3 and ϕ ∈ H01 (Ω ). Furthermore, there is a stability constant Cdec > 0
only depending on Ω such that
kw0 k1,Ω 6 Cdec kwkcurl ,
kϕ k1,Ω 6 Cdec kwkcurl .
(4.8)
We will further make use of the quasi-interpolation operator constructed in (5, Section 5): for any
w ∈ H0 (curl; Ω ) ∩ H 1 (Ω )3 , there is a low-order approximation wh ∈ Vch that satisfies
2
2
2
−1
2
(4.9)
∑ k∇ × (w − wh)k20,K + h−2
K kw − wh k0,K + hK kw − wh k0,∂ K 6 Cq kwk1,Ω ,
K∈Th
with a constant Cq > 0 that only depends on the shape-regularity of the mesh.
Finally, we will make use of the Clément interpolant (see, e.g., (9, Section I.A.3)): for any ϕ ∈
H01 (Ω ), there is a piecewise linear approximation ϕh ∈ H01 (Ω ) such that
2
−1
2
2
2
ϕ
−
ϕ
k
+
h
ϕ
−
ϕ
k
(4.10)
k
k
h
h
∑ k∇(ϕ − ϕh)k20,K + h−2
0,K
K
K
0,∂ K 6 Cc kϕ k1,Ω ,
K∈Th
with a constant Cc > 0 that only depends on the shape-regularity of the mesh.
We are now ready to prove the following result.
12 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
L EMMA 4.4 For any w ∈ H0 (curl; Ω ), the following bound holds
!1
2
1
√
1
−
R(w) 6 2Cdec max{Cc ,Cq max{1, α − 2 Clift2 }} ∑ ηK2
+ 2Cdec max{Cc ,Cq }A (j − jh).
K∈Th
Here, Cdec is the constant arising in the stability bounds stated in (4.8), Cq and Cc are the constants in
(4.9) and (4.10), respectively, and Clift is the constant in (4.3).
Proof. For any arbitrary w ∈ H0 (curl; Ω ), recalling that kwkDG = kwkcurl , we obviously have that
R(w) 6
Z
Ω
j · (w − wch) dx − aeh(uh , w − wch )
(4.11)
kwkcurl
for any wch ∈ Vch . Using the result in (4.7), we decompose w as
w = w0 + ∇ϕ ,
and choose wch ∈ Vch in (4.11) as
wch = w0h + ∇ϕh ,
where w0h is the quasi-interpolant of w0 defined in (4.9) and ϕh is the Clément interpolant of ϕ from
(4.10). In this way we obtain
Z
Ω
with
j · (w − wch) dx − aeh(uh , w − wch) ≡ T1 + T2 ,
T1 =
T2 =
Let us next bound T1 and T2 .
Bound of T1 : We have
T1
Z
=
Ω
+
Z
Ω
Z
Ω
j · (w0 − w0h) dx − aeh (uh , w0 − w0h),
(jh − uh ) · (w0 − w0h ) dx −
∑
Z
K∈Th K
(4.12)
(j − uh ) · ∇(ϕ − ϕh ) dx.
∑
Z
K∈Th K
(∇ × uh ) · ∇ × (w0 − w0h) dx
L (uh ) · ∇ × (w0 − w0h ) dx +
Z
∑
K∈Th K
(j − jh) · (w0 − w0h ) dx,
for any jh ∈ Vh , cf. Remark 3.2. Integrating by parts the second term on the right-hand side of the above
identity and employing the conformity of w0 − w0h yields
−
∑
Z
K∈Th K
=−
=−
(∇ × uh ) · ∇ × (w0 − w0h ) dx
∑
Z
K∈Th K
∑
K∈Th
Z
K
(∇ × ∇ × uh) · (w0 − w0h) dx −
(∇ × ∇ × uh) · (w0 − w0h) dx −
∑
Z
K∈Th ∂ K
∑
nK × (∇ × uh) · (w0 − w0h ) ds
∑
K∈Th F∈∂ K\Γ
1
2
Z
F
[[∇ × uh ]]T · (w0 − w0h ) ds.
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
13 of 27
Here, we denote by nK the outward unit normal vector on ∂ K. Therefore,
T1
=
∑
Z
(jh − ∇ × ∇ × uh − uh ) · (w0 − w0h ) dx +
K∈Th K
−
∑
∑
K∈Th F∈∂ K\Γ
1
2
Z
F
[[∇ × uh]]T · (w0 − w0h ) ds +
∑
Z
K∈Th K
∑
Z
K∈Th K
L (uh ) · ∇ × (w0 − w0h ) dx
(j − jh) · (w0 − w0h ) dx
≡ T11 + T12 + T13 + T14 .
Obviously, we can bound T11 by
T11 6
∑
K∈Th
0
0
ηRK h−1
K kw − wh k0,K ,
(4.13)
where ηRK is the residual defined in (3.2).
To bound T12 we use the Cauchy-Schwarz inequality and the stability of the lifting operator in (4.3);
this yields
∑
T12 6
K∈Th
6α
=α
− 12
− 12
kL (uh )k20,K
1
2
Clift
1
2
Clift
∑
F∈Fh
∑
K∈Th
ka
!1
2
1
2
ηJ2K
∑
K∈Th
[[uh ]]T k20,F
!1
2
∑
K∈Th
2
2
− w0h )k20,K
∑
0
k∇ × (w
!1
!1
0
K∈Th
k∇ × (w
k∇ × (w0 − w0h )k20,K
− w0h )k20,K
!1
!1
2
(4.14)
2
,
where the jump residuals ηJK are defined in (3.6).
For T13 , application of the Cauchy-Schwarz inequality gives
T13 6
∑
K∈Th
6
∑
K∈Th
∑
F∈∂ K\Γ
1
hK k[[∇ × uh]]T k20,F
2
!1
2
1
0
0 2
∑ 2 h−1
K kw − wh k0,F
F∈∂ K
!1
2
−1
ηTK hK 2 kw0 − w0h k0,∂ K ,
(4.15)
with the residual ηTK defined in (3.4). Similarly,
T14 6
∑
K∈Th
0
0
hK kj − jhk0,K h−1
K kw − wh k0,K .
(4.16)
Using the Cauchy-Schwarz inequality, taking into account the approximation bound in (4.9) and the
bounds in (4.13), (4.14), (4.15), and (4.16), we conclude that
T1 6 Cq max{1, α
− 21
1
2
Clift }
∑
K∈Th
ηR2K + ηJ2K + ηT2K
!1
2
kw0 k1,Ω +Cq A (j − jh)kw0 k1,Ω .
(4.17)
14 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
Bound of T2 : Next, let us bound the term T2 in (4.12). Adding and subtracting jh , and integration by
parts, we obtain
T2
=
=
Z
ZΩ
Ω
+
=
Z
(j − jh) · ∇(ϕ − ϕh ) dx −
∑
Z
K∈Th ∂ K
Ω
+
(j − jh) · ∇(ϕ − ϕh ) dx +
Ω
(jh − uh ) · ∇(ϕ − ϕh ) dx
∑
Z
∇ · (jh − uh )(ϕ − ϕh ) dx
K∈Th K
(jh − uh ) · nK (ϕ − ϕh ) ds
(j − jh) · ∇(ϕ − ϕh ) dx −
∑
Z
∑
K∈Th F∈∂ K\Γ
1
2
Z
F
∑
Z
K∈Th K
∇ · (jh − uh )(ϕ − ϕh ) dx
[[jh − uh ]]N (ϕ − ϕh ) ds
≡ T21 + T22 + T23.
For term T21 , we have
Term T22 can be bounded by
T21 6 kj − jhk0,Ω k∇(ϕ − ϕh )k0,Ω .
T22 6
∑
hK k∇ · (jh − uh )k0,K h−1
K kϕ − ϕh k0,K
∑
ηDK h−1
K kϕ − ϕh k0,K ,
K∈Th
=
K∈Th
(4.18)
(4.19)
with the residual ηDK defined in (3.3).
Finally, for term T23 , we have
T23 6
6
∑
K∈Th
∑
K∈Th
∑
F∈∂ K\Γ
1
hK k[[jh − uh ]]N k20,F
2
!1
2
1
2
∑ 2 h−1
K kϕ − ϕh k0,F
F∈∂ K
!1
2
−1
ηNK hK 2 kϕ − ϕh k0,∂ K ,
(4.20)
with the residual ηNK defined in (3.5).
Application of the approximation result in (4.10), the bounds in (4.18), (4.19), and (4.20), and the
Cauchy-Schwarz inequality yields
!1
2
2
2
kϕ k1,Ω +Cc A (j − jh)kϕ k1,Ω .
(4.21)
T2 6 Cc ∑ ηDK + ηNK
K∈Th
Conclusion: from the bounds in (4.17) and (4.21) for T1 and T2 , respectively, we deduce that
!1
2
1
1 −1
T1 + T2 6 max{Cc ,Cq max{1, α − 2 Clift2 }} ∑ ηK2
kw0 k21,Ω + kϕ k21,Ω 2
K∈Th
√
1
+ 2 max{Cc ,Cq }A (j − jh) kw0 k21,Ω + kϕ k21,Ω 2 .
Combining this estimate with the stability bounds in (4.8), we obtain the result.
(4.22)
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
15 of 27
4.5 Proof of Theorem 3.1
The proof of Theorem 3.1 is now an immediate consequence of Lemma 4.3, Lemma 4.4 and the bound
in (4.6). A careful inspection of the proof reveals that all the constants can be bounded independently
of α provided α > 1.
5. Proof of Proposition 3.2
In this section we prove the efficiency bounds stated in Proposition 3.2; here, we employ the bubble
function technique introduced in (33). To this end, for an element K of T h , we denote by bK the
standard polynomial bubble function on K, and for an interior face F shared by two elements K and K 0 ,
we denote by bF the standard polynomial bubble function on F; moreover, set δ F := {K, K 0 }. With this
notation, the following bounds hold.
L EMMA 5.1 Let v be a polynomial function on K; then there exists a constant C > 0 independent of v
and hK such that
kbK vk0,K
6 Ckvk0,K ,
(5.1)
1
2
6 CkbK vk0,K ,
kvk0,K
k∇(bK v)k0,K
6
(5.2)
Ch−1
K kvk0,K .
(5.3)
Moreover, let F be an interior face shared by two elements K and K 0 , and let w be a polynomial function
on F; then there exists a constant C > 0 independent of w and hF such that
1
kwk0,F 6 CkbF2 wk0,F .
(5.4)
0
Finally, there exists an extension Wb ∈ H01 ((K ∪ K )◦ ) of bF w such that Wb |F = bF w and
kWb k0,K
k∇Wb k0,K
1
6 ChF2 kwk0,F
∀K ∈ δF ,
(5.5)
6
∀K ∈ δF ,
(5.6)
−1
ChF 2 kwk0,F
with a constant C > 0 independent of w and hF .
Proof. The proof of (5.1), (5.2), (5.4) and (5.5) is given in (33, Lemma 4.1). The proof of (5.3) and (5.6)
can be obtained by similar arguments; see (2, Theorems 2.2 and 2.4).
Analogous bounds can be easily obtained for vector-valued functions; in particular, we shall need
the following estimates.
L EMMA 5.2 Let v be a (vector-valued) polynomial function on K; then there exists a constant C > 0
independent of v and hK such that
kbK vk0,K
kvk0,K
k∇ × (bK v)k0,K
6 Ckvk0,K ,
(5.7)
1
2
6 CkbK vk0,K ,
Ch−1
K kvk0,K .
6
(5.8)
(5.9)
Moreover, let F be an interior face shared by two elements K and K , and let w be a (vector-valued)
polynomial function on F; then there exists a constant C > 0 independent of w and h F such that
1
kwk0,F 6 CkbF2 wk0,F .
0
(5.10)
16 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
0
Finally, there exists an extension Wb ∈ H01 ((K ∪ K )◦ )3 of bF w such that Wb |F = bF w and
1
kWb k0,K
6 ChF2 kwk0,F
∀K ∈ δF ,
(5.11)
6 ChF kwk0,F
∀K ∈ δF ,
(5.12)
− 21
k∇ × Wbk0,K
with a constant C > 0 independent of w and hF .
We now proceed with the proof of Proposition 3.2.
Bound (i): Let K be an element of Th . For notational convenience, we introduce the following
polynomials on K:
vh = j h − ∇ × ∇ × u h − uh ,
vb = b K vh .
Using the fact that ∇ × ∇ × u + u = j in L2 (K)3 , we obtain
1
kbK2 vh k20,K
=
=
=
=
Z
ZK
ZK
ZK
K
(jh − ∇ × ∇ × uh − uh ) · vb dx
(j − ∇ × ∇ × uh − uh ) · vb dx +
Z
K
(jh − j) · vb dx
(∇ × ∇ × (u − uh ) + (u − uh )) · vb dx +
(∇ × (u − uh )) · (∇ × vb) dx +
Z
K
Z
K
(jh − j) · vb dx
(u − uh ) · vb dx +
Z
K
(jh − j) · vb dx,
where in the last step we have integrated by parts the curl-curl term; we note that, since v b is zero on the
boundary of K, the boundary terms vanish. Using (5.8) and the Cauchy-Schwarz inequality, we obtain
kvh k20,K 6 C (k∇ × (u − uh)k0,K k∇ × vbk0,K + ku − uhk0,K kvb k0,K + kj − jhk0,K kvb k0,K ) ,
and, owing to (5.9) and (5.7), we conclude that
kvh k0,K 6 C h−1
K k∇ × (u − uh)k0,K + ku − uh k0,K + kj − jhk0,K ,
with a constant C > 0 that is independent of the mesh size. Multiplying by h K and noting that ηRK =
hK kvh k0,K yields the desired bound (i).
Bound (ii): To bound ηDK , we set
vh = ∇ · (jh − uh ),
v b = b K vh .
Using (5.2), we obtain
1
kvh k20,K 6 CkbK2 vh k20,K = C
Z
K
∇ · (jh − uh ) vb dx,
with a constant C > 0 that is independent of the mesh size. From (1.1), it is clear that j − u ∈ H(div; Ω )
and ∇ · (j − u) = 0 in L2 (K). Hence
kvh k20,K 6 C
Z
K
∇ · ((jh − j) + (u − uh)) vb dx.
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
17 of 27
Integrating by parts and employing the Cauchy-Schwarz inequality, together with (5.3), yields
−1
kvh k0,K 6 C h−1
K kj − jhk0,K + hK ku − uh k0,K .
Since hK kvh k0,K = ηDK , we deduce bound (ii).
Bound (iii): Let F be an interior face shared by two elements K and K 0 . On F we define the functions
wh = [[∇ × uh ]]T ,
wb = b F wh ,
0
and denote by Wb the extension in H01 ((K ∪ K )◦ )3 of wb which satisfies (5.11) and (5.12). Since
[[∇ × u]]T = 0 on interior faces, we have
1
kbF2 wh k20,F
=
=
=
Z
ZF
[[∇ × uh]]T · wb ds
[[∇ × (uh − u)]]T · wb ds
Z
Z
∇ × ∇ × (uh − u) · Wb dx− ∇ × (uh − u) · (∇ × Wb) dx
∑
F
K∈δF
=
∑
K∈δF
K
K
Z
K
−
Z
K
((j − jh) − ∇ × ∇ × (u − uh ) − (u − uh )) · Wb dx
(∇ × (uh − u)) · (∇ × Wb ) dx −
Z
K
(j − jh) · Wb dx +
Z
K
(u − uh) · Wb dx .
Noting that j − ∇ × ∇ × u − u = 0 in L2 (K)3 , K ∈ δF , employing (5.10), the Cauchy-Schwarz inequality,
together with (5.11) and (5.12), we obtain
1
−1
kwh k0,F 6 C ∑ hF2 kjh − ∇ × ∇ × uh − uh k0,K + hF 2 k∇ × (u − uh)k0,K
K∈δF
1
1
+hF2 kj − jhk0,K + hF2 ku − uhk0,K .
1
Multiplying this by hF2 and taking into account the shape regularity of the mesh and the bound for η RK ,
we get
1
hF2 k[[∇ × uh]]T k0,F 6 C ∑ k∇ × (u − uh)k0,K + hK ku − uhk0,K + hK kj − jhk0,K .
K∈δF
This gives the bound (iii).
Bound (iv): Similarly, we set
wh = [[jh − uh ]]N ,
wb = b F wh ,
0
and proceed as before. The scalar function wb can be extended to a function Wb ∈ H01 ((K ∪ K )◦ )
satisfying (5.5) and (5.6). Since [[j − u]]N = 0 on interior faces and ∇ · (j − u) = 0 in L2 (K), we have
1
kbF2 wh k20,F
=
=
=
Z
ZF
[[jh − uh ]]N wb ds
[[jh − uh − j + u]]N wb ds
Z
Z
∇ · (jh − uh )Wb dx + (jh − uh − j + u) · ∇Wb dx .
∑
F
K∈δF
K
K
18 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
Employing (5.4) and the Cauchy-Schwarz inequality, together with (5.5) and (5.6), we obtain
kwh k0,F
6 C
∑
K∈δF
1
−1
−1
hF2 k∇ · (jh − uh )k0,K + hF 2 ku − uhk0,K + hF 2 kj − jhk0,K .
1
Multiplying this by hF2 and taking into account the shape regularity of the mesh and the bound for η DK ,
we finally get
1
hF2 k[[jh − uh ]]N k0,F 6 C ∑ ku − uhk0,K + kj − jhk0,K .
K∈δF
This shows (iv).
Bound (v): This bound follows immediately from the fact that [[u]]T = 0 on interior faces and that
n × u = 0 on boundary faces.
6. Numerical experiments
In this section we present a series of numerical examples to illustrate the practical performance of
the proposed a posteriori error indicator in (3.7) within an automatic adaptive refinement procedure.
Here, we restrict ourselves to the two-dimensional analogue of (1.1)–(1.2) approximated on 1-irregular
triangular meshes. Additionally, we note that throughout this section we select the interior penalty
parameter α in (2.4) as follows:
α = CIP `2 ,
with CIP = 10. The dependence of α on the polynomial degree ` has been chosen in view of standard
hp-version stability properties for discontinuous Galerkin methods, cf. Remark 2.1, and the references
(16; 23). In contrast, the choice of the constant CIP is based purely on numerical experience; indeed,
we have consistently employed the same value of CIP for a wide range of problems, including linear
advection-diffusion equations, the Stokes equations, second-order quasi-linear elliptic partial differential equations, the compressible Navier-Stokes equations, and the time-harmonic Maxwell system, for
example. In all cases, this choice of CIP is sufficiently large to guarantee stability of the underlying interior penalty DG method, without being so large as to adversely affect the conditioning of the resulting
system of linear/nonlinear equations.
The adaptive meshes are constructed on the basis of the local error indicators η K , by employing the
fixed fraction strategy, with refinement and derefinement fractions set to 25% and 10%, respectively.
Here, the emphasis will be to demonstrate the asymptotic exactness of the proposed a posteriori error
indicator on non-uniform adaptively refined meshes. By asymptotic exactness, we mean that the error
indicator tends to zero at the same rate as the energy norm of the true error, as the mesh is refined.
Thereby, as in (6), we set the constant CEST arising in Theorem 3.1 equal to one and ensure that the
corresponding effectivity indices are roughly constant on all of the meshes employed. Here, the effectivity index is defined as the ratio of the a posteriori error indicator and the DG-norm of the actual error.
For computational simplicity, in all of our numerical experiments, the data approximation terms arising
in the a posteriori error bound (3.8) have been neglected. In general, to ensure the reliability of the
error indicator, the constants CEST and CAPP arising in Theorem 3.1 must be determined; this involves
estimating each of the individual constants appearing within our error analysis, see Remark 3.1 for the
definition of CEST and CAPP . A typical approach is to numerically estimate each of these constants by
19 of 27
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
9
1
8
Effectivity Index
10
0
10
PSfrag replacements
Error Indicator
True Error
−1
10
PSfrag replacements
3
10
4
10
6
5
4
3
2
1
0
0
5
10
Degrees of Freedom
(a)
7
2
4
6
8
10
4
6
8
10
Mesh Number
(b)
15
0
Effectivity Index
10
−1
10
−2
10
PSfrag replacements
Error Indicator
True Error
−3
10
3
10
5
PSfrag replacements
4
0
0
5
10
Degrees of Freedom
(c)
10
0
10
2
Mesh Number
(d)
25
−1
Effectivity Index
10
−2
10
−3
10
−4
10
PSfrag replacements
10
Error Indicator
True Error
3
10
20
15
10
5
PSfrag replacements
4
10
Degrees of Freedom
(e)
5
10
0
0
2
4
6
Mesh Number
(f)
8
10
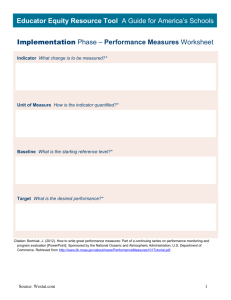
F IG . 1. Example 1. Computed energy norm errors and corresponding effectivity indices, respectively, for: (a) & (b) ` = 1; (c) &
(d) ` = 2; (e) & (f) ` = 3.
20 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
0
10
−1
ku − uhkDG
10
−2
10
−3
10
−4
10
PSfrag replacements
l=1
l=2
l=3
3
10
4
10
Degrees of Freedom
(a)
5
10
(b)
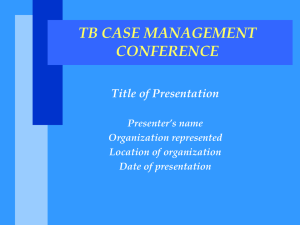
F IG . 2. Example 1. (a) Comparison of the DG-norm of the actual error for ` = 1, 2, 3; (b) Computational mesh after 9 adaptive
mesh refinements with ` = 1 and 16454 elements.
either solving generalised eigenvalue problems, or simply evaluating the maximum of each constant
computed over a given finite dimensional space, cf. (11; 25); see also (35; 12), for related work.
All computations presented in this section have been performed using the MADNESS software package; see (10) for details.
6.1 Example 1
In this first example, we let Ω be the domain (−1, 1)2 and set j = ((1 + 2π 2) cos(π x1 ) sin(π x2 ),
−(1+2π 2 ) cos(π x2 ) sin(π x1 ))> ; thereby, the analytical solution to (1.1)–(1.2), subject to an appropriate
inhomogeneous boundary condition, is given by
u = (cos(π x1 ) sin(π x2 ), − cos(π x2 ) sin(π x1 ))> .
Here, we note that since j is solenoidal, we also have that ∇ · u = 0 in Ω .
In Fig. 1 we plot the estimated and actual DG-norm of the error computed on the sequence of
meshes generated by our adaptive algorithm, together with their corresponding effectivity indices, for
` = 1, 2, 3. Here, we see that for each polynomial degree the a posteriori error indicator over-estimates
the true error by a consistent factor, thereby confirming the asymptotic exactness of the proposed error
indicator for this smooth problem. Additionally, we note that the effectivity indices increase as the
polynomial degree is increased; indeed, for linear elements, the error indicator over-estimates the true
error by a consistent factor between 6–7; for quadratic elements, this factor is between 10–11; finally,
the effectivity indices for cubic elements lie in the range between 17–18. In Fig. 2(a) we compare the
true error, measured in terms of the DG-norm, computed on the sequence of adaptively refined meshes
for each of the polynomial degrees employed. As we would expect for this smooth problem, an increase
in ` leads to a considerable decrease in the DG-norm of the error for a fixed number of degrees of
freedom.
Finally, in Fig. 2(b) we show the mesh generated using the proposed a posteriori error indicator
after 9 adaptive refinement steps with linear elements. Here, we see that while the mesh has been
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
21 of 27
largely uniformly refined throughout the entire computational domain, additional refinement has been
performed where the solution has local maxima and minima; cf. (19). Analogous meshes are also
generated by our adaptive algorithm for ` = 2 and ` = 3; for brevity, these results have been omitted.
6.2 Example 2
In this second example, we consider the numerical approximation of a smooth a.e. non-solenoidal
solution to the two-dimensional analogue of (1.1)–(1.2). To this end, we again select Ω = (−1, 1) 2 ,
but now with j = (ex1 (3x2 cos x2 − sin x2 ), ex1 (2 cosx2 − x2 sin x2 ))> ; thereby, (with suitable boundary
conditions for u), the analytical solution to (1.1)–(1.2) is given by
u = (ex1 (x2 cos x2 + sinx2 ), ex1 x2 sin x2 )> .
In Fig. 3 we plot the estimated and actual DG-norm of the error computed on the sequence of
meshes generated by our adaptive algorithm, together with their corresponding effectivity indices, for
` = 1, 2, 3. As in the previous example, we see that for each polynomial degree the a posteriori error
indicator over-estimates the true error by a consistent factor; though, as before, the computed effectivity
indices increase slightly as the polynomial degree is enriched. A comparison of the actual DG-norm of
the error for ` = 1, 2, 3 is presented in Fig. 4(a); this again highlights the improvement in accuracy per
degree of freedom when higher-order polynomials are employed for smooth problems.
Finally, Fig. 4(b) depicts the mesh generated using the proposed a posteriori error indicator after 8
adaptive refinement steps with linear elements. Here, we see that the mesh has been largely uniformly
refined throughout the entire computational domain, with additional refinement being performed in the
vicinity of the top and bottom right-hand corners of Ω where the curvature of the analytical solution
rapidly changes. Analogous meshes are also generated by our adaptive algorithm for ` = 2 and ` = 3.
6.3 Example 3
In this final example, we select Ω to be the (non-convex) L–shaped domain (−1, 1) 2 \ [0, 1) × (−1, 0]
and set j (and suitable non-homogeneous boundary conditions for u) so that the analytical solution u to
the two-dimensional analogue of (1.1)–(1.2) is given, in terms of the polar coordinates (r, ϑ ), by
u(x1 , x2 ) = ∇(rβ sin(β ϑ )),
(6.1)
where β = 2/3; the analytical solution given by (6.1) then contains a singularity at the re-entrant corner
located at the origin of Ω . In particular, we note that u lies in the Sobolev space H 2/3−ε (Ω )2 , ε > 0.
We note that both u and the forcing function j are solenoidal in this example.
As for the previous two examples, in Fig. 5 we plot the estimated and actual DG-norm of the error
computed on the sequence of meshes generated by our adaptive algorithm, together with their corresponding effectivity indices, for ` = 1, 2, 3. Once again, we observe that for each polynomial degree
the a posteriori error indicator over-estimates the true error by a consistent factor and that the computed
effectivity indices increase slightly as the polynomial degree is enriched. However, in contrast to the
previous two smooth examples, for this test problem we observe from Fig. 6(a) that an increase in the
polynomial degree leads to a slight degradation in the DG-norm of the actual error computed on each of
the sequences of adaptively refined meshes.
22 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
9
Effectivity Index
8
0
10
−1
10
Error Indicator
True Error
PSfrag replacements
PSfrag replacements
3
10
4
6
5
4
3
2
1
0
0
5
10
10
Degrees of Freedom
(a)
7
0
10
2
4
6
8
10
4
6
8
10
Mesh Number
(b)
16
Effectivity Index
14
−1
10
−2
10
12
10
8
6
4
−3
10
PSfrag replacements
Error Indicator
True Error
3
10
PSfrag replacements
4
0
0
5
10
Degrees of Freedom
(c)
10
−1
10
−2
Effectivity Index
−3
10
−4
10
−5
PSfrag replacements
2
Mesh Number
(d)
25
10
10
2
Error Indicator
True Error
20
15
10
5
PSfrag replacements
4
10
Degrees of Freedom
(e)
5
10
0
0
1
2
3
4
5
Mesh Number
(f)
6
7
8
9
F IG . 3. Example 2. Computed energy norm errors and corresponding effectivity indices, respectively, for: (a) & (b) ` = 1; (c) &
(d) ` = 2; (e) & (f) ` = 3.
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
23 of 27
0
10
−1
ku − uhkDG
10
−2
10
−3
10
−4
10
PSfrag replacements
−5
10
l=1
l=2
l=3
3
10
4
10
Degrees of Freedom
(a)
5
10
(b)
F IG . 4. Example 2. (a) Comparison of the DG-norm of the actual error for ` = 1, 2, 3; (b) Computational mesh after 8 adaptive
mesh refinements with ` = 1 and 8774 elements.
Finally, in Fig. 7 we show the mesh generated using the local error indicators after 9 adaptive refinement steps with linear elements. Here, we see that the mesh has been largely refined in the vicinity of
the re-entrant corner located at the origin of the computational domain. Similar grids are also generated
for ` = 2, 3. Analogous behaviour is also observed for a non-smooth problem with non-solenoidal j, and
thereby non-solenoidal analytical solution; for brevity, these results have been omitted.
7. Conclusions
In this article we have introduced a new residual-based a posteriori error indicator for DG discretizations
of H(curl; Ω )–elliptic boundary value problems. We have shown that the indicator is both reliable and
efficient with respect to the DG energy norm. The analysis of the reliability bound relies on employing
a non-consistent reformulation of the DG scheme, together with a decomposition result for the underlying discontinuous space. Numerical experiments presented in this article clearly demonstrate that the
proposed a posteriori indicator converges to zero at the same asymptotic rate as the energy norm of the
actual error on sequences of adaptively refined meshes.
Acknowledgments
PH was supported by the EPSRC (Grant GR/R76615). DS was supported in part by the Natural Sciences
and Engineering Research Council of Canada (NSERC).
R EFERENCES
[1] M. Ainsworth and J. Coyle. Hierarchic hp-edge element families for Maxwell’s equations on hybrid quadrilateral/triangular meshes. Comput. Methods Appl. Mech. Engrg., 190:6709–6733, 2001.
[2] M. Ainsworth and J.T. Oden. A posteriori error estimation in finite element analysis. John Wiley & Sons, 2000.
24 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
0
10
8
Effectivity Index
7
−1
10
−2
10
PSfrag replacements
Error Indicator
True Error
−3
10
PSfrag replacements
2
10
3
5
4
3
2
1
0
0
4
10
10
Degrees of Freedom
(a)
6
0
10
2
4
6
8
10
4
6
8
10
4
6
8
10
Mesh Number
(b)
12
Effectivity Index
10
−1
10
−2
10
PSfrag replacements
2
10
3
0
0
4
10
10
Degrees of Freedom
(c)
0
Effectivity Index
−1
−2
10
PSfrag replacements
2
Mesh Number
(d)
15
10
−3
4
PSfrag replacements
10
10
6
2
Error Indicator
True Error
−3
10
8
Error Indicator
True Error
3
10
10
5
PSfrag replacements
4
10
Degrees of Freedom
(e)
5
10
0
0
2
Mesh Number
(f)
F IG . 5. Example 3. Computed energy norm errors and corresponding effectivity indices, respectively, for: (a) & (b) ` = 1; (c) &
(d) ` = 2; (e) & (f) ` = 3.
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
25 of 27
−1
ku − uhkDG
10
−2
10
PSfrag replacements
l=1
l=2
l=3
−3
10
2
10
3
10
4
10
Degrees of Freedom
5
10
F IG . 6. Example 3. Comparison of the DG-norm of the actual error for ` = 1, 2, 3.
(a)
(b)
F IG . 7. Example 3. (a) Computational mesh after 9 adaptive mesh refinements with ` = 1 and 2088 elements; (b) Zoom of (a)
around the origin.
26 of 27
P. HOUSTON, I. PERUGIA, AND D. SCHÖTZAU
[3] H. Ammari, A. Buffa, and J.C. Nédélec. A justification of eddy currents model for the Maxwell equations. SIAM
J. Appl. Math., 60:1805–1823, 2000.
[4] D.N. Arnold, F. Brezzi, B. Cockburn, and L.D. Marini. Unified analysis of discontinuous Galerkin methods for
elliptic problems. SIAM J. Numer. Anal., 39:1749–1779, 2002.
[5] R. Beck, R. Hiptmair, R. Hoppe, and B. Wohlmuth. Residual based a-posteriori error estimators for eddy current
computation. Modél. Math. Anal. Numér., 34:159–182, 2000.
[6] R. Becker, P. Hansbo, and M.G. Larson. Energy norm a posteriori error estimation for discontinuous Galerkin
methods. Comput. Methods Appl. Mech. Engrg., 192:723–733, 2003.
[7] A. Bossavit. Électromagnétisme. Springer–Verlag, 1993.
[8] L. Demkowicz and L. Vardapetyan. Modeling of electromagnetic absorption/scattering problems using hp–adaptive
finite elements. Comput. Methods Appl. Mech. Engrg., 152:103–124, 1998.
[9] V. Girault and P.Raviart. Finite element methods for Navier-Stokes equations. Springer, Berlin Heidelberg New
York, 1986.
[10] E. Hall and P. Houston. MADNESS: Multi–dimensional ADaptive fiNite Element Solution Software. Users Manual
Version 1.0. Technical report, University of Nottingham, (in preparation).
[11] D.C. Handscomb. Errors of linear interpolation on a triangle. Technical Report NA95/09, Oxford University
Computing Laboratory, 1995.
[12] I. Harari and T. Hughes. What are C and h?: Inequalities for the analysis and design of finite element methods.
Comput. Methods Appl. Mech. Engrg., 97:157–192, 1992.
[13] R. Hiptmair. Finite elements in computational electromagnetism. Acta Numerica, 11:237–339, 2002.
[14] P. Houston, I. Perugia, A. Schneebeli, and D. Schötzau. Interior penalty method for the indefinite time-harmonic
Maxwell equations. Numer. Math., 100:485–518, 2005.
[15] P. Houston, I. Perugia, A. Schneebeli, and D. Schötzau. Mixed discontinuous Galerkin approximation of the
Maxwell operator: The indefinite case. Modél. Math. Anal. Numér., 39(4):727–754, 2005.
[16] P. Houston, I. Perugia, and D. Schötzau. hp-DGFEM for Maxwell’s equations. In F. Brezzi, A. Buffa, S. Corsaro,
and A. Murli, editors, Numerical Mathematics and Advanced Applications ENUMATH 2001, pages 785–794.
Springer, 2003.
[17] P. Houston, I. Perugia, and D. Schötzau. Mixed discontinuous Galerkin approximation of the Maxwell operator.
SIAM J. Numer. Anal., 42:434–459, 2004.
[18] P. Houston, I. Perugia, and D. Schötzau. Recent developments in discontinuous Galerkin methods for the timeharmonic Maxwell’s equations. International Compumag Society Newsletter, 11(2):10–17, 2004.
[19] P. Houston, I. Perugia, and D. Schötzau. Energy norm a posteriori error estimation for mixed discontinuous
Galerkin approximations of the Maxwell operator. Comput. Methods Appl. Mech. Engrg., 194:499–510,
2005.
[20] P. Houston, I. Perugia, and D. Schötzau. Mixed discontinuous Galerkin approximation of the Maxwell operator:
Non-stabilized formulation. J. Sci. Comp., 22:315–346, 2005.
[21] P. Houston, D. Schötzau, and T. Wihler. Energy norm a posteriori error estimation for mixed discontinuous Galerkin
approximations of the Stokes problem. J. Sci. Comp., 22(1):357–380, 2005.
[22] P. Houston, D. Schötzau, and T. Wihler. An hp-adaptive mixed discontinuous Galerkin FEM for nearly incompressible linear elasticity. Comput. Methods Appl. Mech. Engrg., (to appear).
[23] P. Houston, D. Schötzau, and T. P. Wihler. Energy norm a posteriori error estimation of hp-adaptive discontinuous
Galerkin methods for elliptic problems. Math. Models Methods Appl. Sci., (to appear).
[24] P. Houston, C. Schwab, and E. Süli. Discontinuous hp-finite element methods for advection–diffusion–reaction
problems. SIAM J. Numer. Anal., 40:2133–2163, 2002.
[25] P. Houston and E. Süli. Adaptive Lagrange–Galerkin methods for unsteady convection-diffusion problems. Math.
Comp., 70(233):77–106, 2001.
[26] O.A. Karakashian and F. Pascal. A posteriori error estimation for a discontinuous Galerkin approximation of second
order elliptic problems. SIAM J. Numer. Anal., 41:2374–2399, 2003.
AN A POSTERIORI ERROR INDICATOR FOR DG DISCRETIZATIONS OF H(curl)–ELLIPTIC PDES
27 of 27
[27] P. Monk. Finite element methods for Maxwell’s equations. Oxford University Press, New York, 2003.
[28] J.C. Nédélec. A new family of mixed finite elements in R3 . Numer. Math., 50:57–81, 1986.
[29] I. Perugia and D. Schötzau. An hp-analysis of the local discontinuous Galerkin method for diffusion problems. J.
Sci. Comp., 17:561–571, 2002.
[30] I. Perugia and D. Schötzau. The hp-local discontinuous Galerkin method for low-frequency time-harmonic
Maxwell equations. Math. Comp., 72:1179–1214, 2003.
[31] I. Perugia, D. Schötzau, and P. Monk. Stabilized interior penalty methods for the time-harmonic Maxwell equations.
Comput. Methods Appl. Mech. Engrg., 191:4675–4697, 2002.
[32] L. Vardapetyan and L. Demkowicz. hp-adaptive finite elements in electromagnetics. Comput. Methods Appl.
Mech. Engrg., 169:331–344, 1999.
[33] R. Verfürth. A posteriori error estimation and adaptive mesh-refinement techniques. J. Comput. Appl. Math.,
50:67–83, 1994.
[34] R. Verfürth. A Review of A Posteriori Error Estimation and Adaptive Mesh-Refinement Techniques. Wiley-Teubner,
1996.
[35] R. Verfürth. On the constants in some inverse inequalities for finite element functions. Technical Report 257,
University of Bochum, 1999.