Noise-sensitivity in machine tool vibrations E. Buckwar, R. Kuske B. L’Esperance,
advertisement

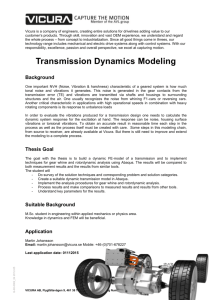
Noise-sensitivity in machine tool vibrations E. Buckwar, 1 R. Kuske 2 B. L’Esperance, 3 T. Soo 4 Abstract We consider the effect of random variation in the material parameters in a model for machine tool vibrations, specifically regenerative chatter. We show that fluctuations in these parameters appear as both multiplicative and additive noise in the model. We focus on the effect of additive noise in amplifying small vibrations which appear in subcritical regimes. Coherence resonance is demonstrated through computations, and is proposed as a route for transitions to larger vibrations. The dynamics also exhibit scaling laws observed in the analysis of general stochastic delay differential models. 1 Introduction Machine tool vibrations, commonly known as chatter, are essentially self-induced oscillations in a machining process, such as metal cutting, milling, or drilling. Chatter can be responsible for machine or workpiece damage, and it can lower productivity or precision in the process. Factors contributing to chatter are varied and research into the physical sources has been ongoing for decades. Recent improvements in technology, particularly related to high-speed machining, have contributed to the sources for vibrations, so that the understanding of this phenomenon is far from complete. Appropriate models for machining are necessary, particularly in predicting the behavior and thus improving efficiency and prolonging machine life. New directions in virtual machine tools rely on modeling and computational power, with chatter prediction as a crucial building block in the design of a complete machining process [1] [2]. Early efforts by Tlusty [3] and Tobias [4] have provided a basis for modeling machine tool vibrations, and illustrate why oscillations are inherent in the system. A crucial aspect in these models is that the force on the tool depends on the previous cut. In Figure 1 we show the case where the cutting process takes place as the workpiece is rotated. Then variations in the cut depth from the previous rotation can feedback into the system to excite further vibrations, thus the name regenerative chatter. Consequently mathematical models for machine tool vibrations must involve a delay, representing the time of one revolution of the workpiece. It is well known in the modeling literature that delays naturally give rise to oscillatory and even chaotic behavior, depending on the model [5]-[11], and machining processes are no exception. The dynamics of machine tool vibrations have been studied from a variety of perspectives, including analysis, computations, and experiments (see [12]-[19] and references therein). In all examples the goal is to understand the source of chatter in order to avoid it. Certain models have considered the effect of variable speed on chatter [20, 21], as well as understanding the nonlinear behavior with a frequency different from the natural frequency of the system [19][22]. Other issues include the geometry of the cutting which can affect the bifurcation structure of the nonlinear behavior [23]. Most of the analytical and computational studies have concentrated on the deterministic dynamics. Since these models naturally include time delays, they are already difficult to analyze in the deterministic setting. When noise is included, the collection of methods for studying these models in limited, both computationally and analytically. In order to focus the discussion, we consider a particular aspect of the effect of noise on regenerative chatter. We consider the system in a parameter regime where, without noise, vibrations 1 Institut für Mathematik Humboldt-Universität Berlin, DE,email:buckwar@mathematik.hu-berlin.de Department of Mathematics, University of British Columbia, Vancouver, BC Canada , email: rachel@math.ubc.ca 3 University of Montreal, Quebec, Canada email: bruno.lesperance@UMontreal.CA 4 Department of Mathematics, University of British Columbia, Vancouver, BC Canada , email:tsoo@math.ubc.ca 2 1 chip tool previous cut present cut Figure 1: Schematic illustrating the influence of the delay on the cutting process. The inset shows the setting when the workpiece is rotated while the tool is held fixed. Ideally, chip thickness and the force on the tool are in equilibrium (2.3). In general, the force depends on chip thickness which in turn depends on both the previous and present cut. In (2.8) variations in chip thickness are related to the difference in tool location over one revolution z(t − τ ) − z(t) with τ the time of one revolution. would decay and the equilibrium position would be stable. The choice of the parameter regimes reflects the balance of two goals: choosing operating regimes where the oscillations are damped while maximizing the range of parameter values for operation. Given the complex stability regions found for machine tools, shown in Figure 3 in Section 3, the balance of these two goals can result in operating near the stability boundaries for the deterministic steady, non-oscillatory behavior. As shown in a variety of other contexts, even when the system is tuned to a regime where oscillations would decay in a noise-free setting, the presence of noise can cause a resonance which sustains the oscillations. This phenomenon is known as autonomous stochastic resonance or coherence resonance, and has been studied in a number of contexts, with and without delays [5]-[9], [24]-[27]. In these examples the resonance effect can be amplified in parameter regimes near stability boundaries for the equilibrium state. Here we investigate this phenomenon in the context of regenerative chatter. To illustrate the noise sensitivity in the context of machine tool vibrations, we begin with a simulation of the simple model, dx = y ds dy = (−2κy − x + c1 (x(s − τ ) − x(s)))ds + δdW (s). (1.1) In the following section we show that this is the linearized equation for variations from a desired chip thickness, due to vibrations. Here W is a standard Brownian motion, κ is a damping coefficient, c1 is a non-dimensionalized material parameter, and τ is a delay due to rotation in the machining process. Temporarily we have dropped the terms with multiplicative noise which are present in the full model (2.9) but do not play a significant role in the parameter regime considered in Figure 2. In Section 3.3 we show the significance of both types of noise when we discuss transitions from small oscillations to nonlinear behavior in the context of the full model (2.9). In Figure 2 we show that, keeping the noise at a low level, the vibrations are amplified as the other parameters vary, even though these parameters remain in the range where the zero state is stable in the absence of noise. This phenomenon is due to two factors: the resonance of the noise with the primary oscillation mode and the factor of the amplification of noise, which can be shown 2 to be inversely proportional to the square root of the distance in parameter space from the stability boundary for the equilibrium state [27]. The same phenomenon is observed for the complete model (2.9) which is studied in Section 3.3. We note a few key features of the behavior shown in Figure 0.8 0.6 0.4 0.2 0 x −0.2 −0.4 −0.6 −0.8 700 750 800 850 900 s Figure 2: The numerical simulation of (1.1) for κ = .05, δ = .05, τ = 66 for large s with a small initial condition, below the noise level δ. The solid line corresponds to c1 = .07, and the dash-dotted line is c1 = .11. Note that the noise level and the delay is the same for both realizations, but for the dash-dotted line we have chosen a value of c1 which is closer to the stability boundary (shown in Figure 3). Even though the parameters chosen are below the deterministic threshold for growth of oscillations, the variance of the amplitude of the oscillation does not decrease to zero. 2. Firstly, the oscillations are a noise induced phenomenon; without noise the oscillations would decay to zero, since the parameters are chosen in the region where the zero solution is stable in the deterministic case. Secondly, even though they are caused by noise, the oscillations appear to have a regular frequency in the oscillations, with a variation in the amplitude or envelope of the oscillations. Indeed, an analysis of the power spectrum shows a strong peak near the natural frequency of the deterministic system. Thirdly, the amplitude of the oscillations is an order of magnitude larger than the actual noise level. The noise coefficient for both simulations is δ = .05, while the maximum amplitude regularly observed in the oscillations increases from approximately |x| ∼ .2 for c1 = .07 to |x| ∼ .6 for c1 = .11. In the following section we derive the model, showing how both additive and multiplicative noise play a role in the dynamics. In Section 3 we give simulations of the model to demonstrate the effect of the noise. There we show an amplification of the noise which is consistent with analytical results predicted for general linear and nonlinear stochastic differential delay models [27]. These results, based on the method of multiple scales, predict that when the system in operated in a regime near the stability boundary of the equilibrium for the deterministic system, the noise is amplified by an order of magnitude, related to the distance to the stability boundary for the steady equilibrium state. 3 2 The model We begin with the one degree of freedom model for machine tool dynamics [12] d2 z dz F (f ) + 2ακ + α2 z = . dt2 dt m (2.1) Here z is the machine tool position, κ is the damping factor, and α 2 = ks /m is the ratio of stiffness, ks , to the mass of the machine tool, m, so that α 2 gives the natural frequency of the undamped system. The cutting force is given by F which depends on the chip thickness f . In general, the force is adjusted so that there is an equilibrium position z 0 corresponding to a desired equilibrium chip thickness f 0 α2 z0 = F (f0 ) . m (2.2) The functional form of the force is determined experimentally, viewing the cutting force as an empirical function of the physical parameters as discussed in [3] [4] [12], 3/4 F (f0 ) K0 wf0 = m m . (2.3) Under ideal circumstances, the machine tool stays at this equilibrium position z 0 , yielding a uniform desired chip thickness. Here K0 is a constant that depends on material properties and w is the chip width. We consider the case where variations in the system enter through variations in the material properties, so we write K = K0 (1 + η), with η viewed as a percentage of K 0 . In particular, we are interested in how these variations translate into vibrations in the machine tool position. In order to determine circumstances in which there is a significant deviation from z 0 , we consider variations about z = z0 . We also non-dimensionalize the equations by using the change of variables, z = z0 (1 + x), s = αt, (2.4) to get dx Kw 3/4 K0 w d2 x + 2κ (1 + η)(f0 + (f − f0 ))3/4 − f , +x= ds2 ds mα2 z0 mα2 z0 0 (2.5) 3/4 where we have added and subtracted K 0 wf0 /m to the right hand side of (2.1) before dividing by z0 α2 and using (2.2)-(2.3) A reasonable approximation can be obtained by using a Taylor series expansion about f − f0 = 0, keeping terms up to (f − f0 )3 [12] [23]. Then on the right hand side of (2.5) we have 3 X K0 w 3/4 K0 w 3/4 (1 + η)(f + (f − f )) − f = η + cj (1 + η)(f − f0 )j , 0 0 mα2 z0 mα2 z0 0 j=1 (2.6) where c1 = 3 K0 w , 4 (mα2 f 1/4 ) 0 c2 = − 1 c1 z0 , 8 f0 4 c3 = 5 c1 z02 . 96 f02 (2.7) The chip thickness variation f − f0 can be expressed simply as the difference between the tool edge position delayed by one rotation z(t−2π/Ω) and the present position z(t), so that the equation for x is 3 X d2 x dx + 2κ + x = η + cj (1 + η) [x(s − τ ) − x(s)]j , ds2 ds j=1 with τ = 2πα Ω (2.8) and Ω the angular velocity of the rotation in the machining process. In our model we take the variation η in K to be modeled by white noise δdW as a simple model for variations in the material properties encountered in the cutting process. We take δ in the range .01 < δ < .15, as representative of the percentage variation in K. It is also convenient to write the second order equation as a first order system: dx = y ds dy = (−2κy − x + 3 X cj [x(s − τ ) − x(s)]j )ds + δdW + j=1 3 X cj [x(s − τ ) − x(s)]j δdW. (2.9) j=1 The choice for η is convenient since it allows us to compare the behavior of the oscillations to that found in previous analyses of similar stochastic delay-differential models [27]. If we replace the white noise with colored noise in (2.9), the oscillations with the natural frequency are again amplified as seen in Figure 2. As suggested by the simulations in this paper and confirmed by the analysis in [27], the important aspect is the resonance of the noise with the natural frequency, so that a similar coherence resonance is observed as long as the noise contains this frequency. Then (2.9) can be viewed as the equation for the variation from the desired chip thickness z0 , with its magnitude |x| given as the percentage of z 0 . The key parameters are the delay τ , proportional to the inverse rotational velocity, and c 1 , which is a non-dimensionalized material parameter. The noise coefficient δ can be viewed as the percentage of variation in the material properties. In the following we give numerical simulations for fixed damping κ, considering a range of c1 and δ and a few different values for τ . 3 Numerical simulations and resonant behavior In this section we demonstrate numerically the effect of the noise in combination with the other parameters in (2.9). In particular, we consider the stochastic resonance as we vary c 1 and τ , which is equivalent to considering different combinations of K 0 and Ω. We fix the remaining parameters at α = 775 rad/sec , m = 50 kg, κ = .05, f0 = .001 m. The ranges of parameter values are chosen to be comparable to parameters used in [12, 17, 18]. First we review the linear stability analysis for steady state solution of the deterministic system (2.9) with δ = 0. Then we show simulations of the linear system, to demonstrate that the resonance of the primary mode with the noise sustains significant oscillations, even for small noise. Finally we show the implications of this resonance on the fully nonlinear system. The numerical simulations have used both the Euler-Maruyama method [28] and the multi-step method for stochastic delay differential equations [29]. By using a higher order method, we verify that the oscillations observed in the simulation are not due to the numerical method. 3.1 Linear stability We review the linear stability analysis of the steady state x = 0 for the deterministic system, which has been given previously in [30], and also discussed in [13]. We consider system (2.8) with δ = 0 5 and linearized about x = 0, which yields dx d2 x − 2κ + x = c1 (x(s − τ ) − x(s)). 2 ds ds (3.10) Substituting x = eλt yields the characteristic equation λ2 − 2κλ + 1 = c1 (e−λτ − 1). (3.11) The stability boundary is determined by setting λ = iω in (3.11), dividing this equation into its real and imaginary parts, and solving these two equations for c 1 and τ . These curves are shown in Figure 3, in terms of the non-dimensional parameters and the dimensional parameters. The c1 0.115 0.11 0.105 0.1 40 45 50 55 60 65 70 75 τ 6 3.7 x 10 3.6 3.5 3.4 K0 3.3 3.2 3.1 3 700 800 900 1000 1100 1200 Ωrpm Figure 3: The stability boundary for the zero solution of the linearized deterministic equation (3.12) with δ = 0; that is, there is a stable equilibrium at x = 0 for parameter values below these curves. There is a series of curves, due to the periodicity of the functions in (3.11) with λ = iω. The top figure gives the stability boundary in terms of the non-dimensional parameters c1 and τ . The bottom figure shows the same boundary for the dimensional parameters K0 (N/m1.75 ) and Ωrpm (rpm). Here Ωrpm = 60 · Ω/(2π) is used for consistency with graphs given in previous references, for example [12]. shape of the stability boundary implies that for certain values of τ there is a larger range of c 1 for which the steady state x = 0 is linearly stable. Since the delay τ is inversely proportional to Ω, the angular velocity of the rotating workpiece, then there may be certain preferred values of Ω for which the machining process is expected to be stable for a larger range of the material parameter K0 . 3.2 Resonance in the noisy linearized system Now we consider the effect of noise in (2.9), linearized about x = 0, dx = y ds dy = (−2κy − x + c1 [x(s − τ ) − x(s)])ds + δdW + c1 [x(s − τ ) − x(s)] δdW 6 (3.12) 8 7 6 5 4 p(x) 3 2 1 0 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 x Figure 4: The probability density p(x) for τ = 39 and c1 = .09 (dashed line), c1 = .11 (dashed-dotted line) and c1 = .115 (diamonds) for δ = .02. All values are in the stability regime for the steady state of the deterministic equation. Nevertheless, oscillations are sustained, with larger oscillations occurring with increased probability for parameter values closer to the stability boundary. We focus on this system in order to demonstrate the impact of the resonance with the primary mode of the linearized system (3.12) with frequency ω = 1 + O(κ 2 ) for κ 1. The linearization also allows us to focus on this resonance, while temporarily neglecting other large amplitude states that exist in the fully nonlinear system. In Section 3.3 we discuss the implications of this resonance in the full system. Results from simulations of the linearized system (3.12) for a range of values of c 1 and fixed τ are shown in Figures 4 and 5 via the stationary probability density function p(x). This density is obtained by running simulations over a sufficiently long time (in this case s = O(α) which is t = O(1) in the original time scale), for 5000 realizations. From these realizations we get a reasonable approximation for the stationary probability density for x, the deviation of tool location as a percentage of the desired position z 0 . That is, the simulations are run over a sufficiently long time so that the density does not change if the simulations are run for larger values of the nondimensionalized time s. The purpose of showing first the stationary density for the linear system is to illustrate how the oscillations are amplified via a resonance, particularly with the additive noise. Later we discuss how this resonance plays a role in the nonlinear system. In Figure 4, we show simulations for δ = .02, τ = 39 (Ω rpm ≈ 1192) with c1 = .09, .110, .115. Referring to Figure 3, we see that these values of c 1 are in the stability region for the zero solution of the deterministic system. However, the oscillations do not decay over time, as shown by the graphs of the probability density. Rather, the density shows a standard deviation of approximately, p Var(x) =.055, .095, .13, respectively, for the values of c 1 given above, with amplitudes typically observed over the range of .1 < |x| < .35, that is, 10−35% variation of the equilibrium tool position z0 . We show the stationary probability density, which means that these oscillations are sustained over time and do not damp out, even though the parameter values are chosen in the stability region for the deterministic system. Note that the larger oscillations are observed for values of c 1 closer 7 to the stability boundary for x = 0. From Figure 4 we see that even though the noise is small δ = .02, there is a significant probability at any time that the amplitude of oscillations is an order of magnitude larger than δ. In Figure 5, we show simulations for δ = .07, τ = 39 and τ = 66 (Ω rpm ≈ 1192 and Ωrpm ≈ 704.5), and varying values of c1 , again chosen in the stability region for the zero solution of the linear deterministic system. The noise is slightly larger (δ = .07) than in Figure 4 but it is still small. Again the oscillations are amplified by an order of magnitude and indeed oscillations with an O(1) amplitude can be observed. 2.5 1.8 1.6 2 1.4 1.2 1.5 p(x) 1 0.8 p(x) 1 0.6 0.4 0.5 0.2 0 −1.5 −1 −0.5 0 x 0.5 1 0 −1.5 1.5 −1 −0.5 0 0.5 1 1.5 x Figure 5: On the left, we show the probability density p(x) with τ = 39 and c1 = .09 (dash-dotted lined) and c1 = .11 for δ = .07 (diamonds). On the right, we show the probability density p(x) with τ = 66 and c1 = .09 (dash-dotted line) and c1 = .105 for δ = .07 (diamonds). All parameter values are in the stability regime for the deterministic equation. However, substantial oscillations are sustained, with larger oscillations occurring with increased probability for values closer to the stability boundary for x = 0. The amplification of the noise can be calculated analytically using a multi-scale analysis as in [27], for general linear and non-linear stochastic differential delay equations with additive and multiplicative noise. In that previous study, equations for the amplitude of the oscillations are obtained for long time scales. These equations include an effective noise term, which can be derived as a result of the resonance with the primary mode of the deterministic system. The magnitude of the effective noise given in [27] is δ/, where δ is the noise level of the original system, and 2 is the distance of the control parameter(s) from the stability boundary for the steady state. For the present system, δ is also the noise level, and the parameter c 1 or τ plays the role of the control parameter. For example, if (c∗1 , τ ∗ ) corresponds to a point on the stability boundary in the top of Figure 3, then we could define 2 = c∗1 − c1 with τ = τ ∗ . In the simulations shown above, ranges from approximately .1 < < .3, which suggests an amplification factor between 3 and 10 for the noise level in the dynamics. In fact, this is what is observed in Figure 2, and in the simulations for the densities shown in Figures 4 -5. Calculations similar to those in [27] can be used to derive stochastic amplitude equations and the amplification factor of the noise for the present system (2.9) and (3.12), and we leave that to future work. 8 3.3 Implications for the oscillations in the nonlinear system In Figure 6 we show the probability P (x > x c ), that is the probability that x exceeds a threshold value xc . Over long times, this probability can be viewed as the percentage of time that the system (3.12) has oscillations with amplitudes that exceed 100x c % of the equilibrium value z0 . P (x > xc ) can be calculated by integrating the approximation to the probability density computed from the simulations as shown in Figures 4 and 5, P (x > xc ) = Z ∞ p(x)dx . (3.13) xc Clearly this probability increases with increased amplitude of the oscillations. From Figure 6 we see that this probability increases either as the noise level increases or as the material parameter c 1 and/or the delay parameter τ values approach the stability boundary. Then P (x > x c ) can be used as a measure of the variation of the oscillations in the tool position, illustrating the information contained in p(x). 0.35 0.3 0.25 P (x > xc ) 0.2 0.15 0.1 0.05 0 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1 0.105 0.11 0.115 c1 Figure 6: The graph of P (x > xc ), the probability that the linearized system exceeds xc for varying values of c1 and τ = 39. The ∗’s correspond to a noise level of δ = .02 with a threshold of xc = .15. The o’s correspond to noise level δ = .07 and a threshold of xc = .35. Notice the increase of P (x > xc ) as the values of c1 approach the stability boundary for x = 0. Above we have demonstrated the behavior of the probability density for the linear system. We outline the implications of this behavior for the nonlinear system in the setting of a subcritical bifurcation, as shown in Figure 7 and observed in a number of studies of deterministic models for machine tool vibrations [12, 22, 23]. In Figure 7a, we give a sketch of the typical bifurcation scenario for the deterministic system, similar to that shown in [12]. The sketch is shown in terms of the non-dimensional material parameter c 1 as the bifurcation parameter. The branch shown bifurcates from the equilibrium state at the Hopf bifurcation point c ∗ . We consider the behavior for c < c∗ , as used in the results shown in Figures 4-6. In the absence of noise, small perturbations to the zero state are damped, since small oscillations are unstable. However, for large enough perturbations, the system can move to large amplitude nonlinear oscillations which are stable. In the presence of noise we have shown that small oscillations can be amplified through coherence resonance, so that once these oscillations are large enough, the nonlinear system may make the 9 transition to the branch of large amplitude behavior, as discussed in [12]. Then the system may continue in a non-linear mode, and for sufficiently large x may move into a mode where the tool loses contact with the workpiece. Then quantities such as P (x > x c ) indicate the probability that the system makes a transition from small, nearly linear oscillations to large nonlinear oscillations. In particular, we can compute the probability that x exceeds a critical value, which can be set as the threshold for such a transition. The transition to a nonlinear mode with large oscillations is demonstrated in Figure 7b for the fully nonlinear system (2.9), comparing realizations of the system for parameters in the stability range for the zero solution, with and without noise. That is, in the absence of noise, the oscillations in the system damp out to zero, so that the system goes to steady state. However, the small oscillations are amplified even with small noise (in this case δ = .05), so that eventually the system makes the transition to oscillations with O(1) amplitude. As can be seen from (2.9), once the system makes a transition to large oscillations, the multiplicative noise then plays a role in contributing to the irregularity, and the additive noise does not influence the dynamics as much, since it is relatively small. We leave a complete exploration of the fully nonlinear noisy system for future work. maximum amplitude 1.5 1 large amplitude nonlinear mode 0.5 x 0 −0.5 small amplitude nonlinear mode zero solution −1 −1.5 2200 control parameter (c1 ) 2250 2300 2350 2400 2450 2500 s Figure 7: Left: Bifurcation branch for a subcritical bifurcation from the zero state. In the deterministic case small amplitude oscillations are unstable, while large amplitude fully nonlinear solutions may be stable. For subcritical values of the control parameter, such as the material parameter c 1 , noise can cause a transition to large amplitude oscillations, through a resonance response which allows significant variation beyond the unstable small oscillations. Right: Realization for the nonlinear system with noise, δ = .05 (dotted line) and without noise (solid line), with small initial condition. Here τ = 65 and c1 = .104. Without noise, the solution decays slowly to zero, which is stable for small initial conditions. With noise the small amplitude oscillations are amplified through a resonance with the noise, and the system makes a transition to a large amplitude oscillation, corresponding to a nonlinear mode. 4 Summary We have derived a model for machine tool vibrations when the material properties of the workpiece fluctuate randomly. The randomness appears as both additive and multiplicative noise in the nondimensionalized equation for the percent variation from the machine tool equilibrium position. We 10 show that the resonance of the additive noise with the natural mode of the linearized system plays a dominant role in the dynamics, particularly in the subcritical regime where small vibrations would be otherwise damped. Then oscillations can be sustained in subcritical regimes through coherence resonance. The effective amplification factor for the noise is −1 where is a measure of proximity to the linear stability threshold of the equilibrium state in the deterministic system. That is, the amplification factor increases both with the size of the noise and as the model parameters approach critical values corresponding to a Hopf bifurcation in the absence of noise. One important aspect in this setting is the concept of stability. Clearly in the deterministic case stability is defined via boundaries in parameter space between growth and decay of oscillations. In the stochastic setting the stability is not clearly defined. Typically Lyapunov exponents and structure of the invariant densities have been used to classify stability in stochastic dynamical systems [26] [31] [32]. Here we have shown that certain critical combinations of noise levels and parameter regimes near stability boundaries can allow and even promote transitions between different stable states, particularly in the context of subcritical bifurcations. The results shown above suggest that in practical settings factors such as the amplification of the oscillations is of central importance. Even though the amplitude of the oscillations is not growing in this setting, it is not decaying, so variance of the amplitude is a contributing factor towards transitions to nonlinear states. Figure 6 suggests a second quantity based on the probability density function p(x) which provides an indicator for transitions in finite time. There the quantity P (x > x c ) is defined as the probability that deviations x from the equilibrium z 0 is above a threshold xc for a certain percentage of the time. In the context of a system with a supercritical bifurcation, or one where subcritical oscillations are unstable, this probability defines the percentage of time in which chatter is above a given threshold for subcritical parameter regimes. In the context of subcritical bifurcations with unstable small amplitude oscillations and stable large amplitude behavior, there is a threshold above which nonlinear behavior can be observed. When there is a finite probability that the oscillations exceed a threshold xc , then there is a finite probability that a small perturbation can result in a transition to the nonlinear state. For machine tool dynamics, calculating the probability that a transition can occur on an O(1) time scale gives significant insight into the incidence of chatter. Quantities of this type are of greater interest than stability measures obtained over long time scales, particularly when transitions on O(1) time scales can be catastrophic. References [1] Manufacturing Automation Laboratories,http://www.malinc.com/. [2] P. Zelinski,“The Dynamics of Better Drilling”, Modern Machine Shop, http://www.mmsonline.com/articles/060101.html, 2001. on line [3] J. Tlusty and L. Spacek, Self-Excited Vibrations on Machine Tools, Nakl. CSAV, Prague. [4] S. A. Tobias,Machine Tool Vibrations, Blackie, London, 1965. [5] J. Garcia-Ojalvo and R. Roy, “Noise amplification in a stochastic Ikeda model”, Phys. Lett. A 224 (1996), 51-56. [6] S. Kim, Seon Hee Park, and H.-B. Pyo, “Stochastic resonance in coupled oscillator systems with time delay”, Phys. Rev. Lett. 82 (1999) 1620-1623. [7] J. L. Cabrera, J. Gorronogoitia, and F. J. de la Rubia, “Noise-correlation-time-mediated localization in random nonlinear dynamical systems”, Phys. Rev. Lett. 82 (1999), 2816-2819. 11 [8] T. Ohira and Y. Sato, “Resonance with Noise and Delay”, Phys. Rev. Lett. 82 (1999) 28112815. [9] A. Longtin, J.G. Milton, J. Bos, and M. Mackey, “Noise and critical behavior of the pupil light reflex at oscillation onset”, Phys. Rev. A 41, 6992-7005. [10] A. Beuter, J. Belair, and C. Labrie, “Feedback and delays in neurological diseases: a modeling study using dynamical systems”, Bull. Math. Bio. 55 (1993) 525-541. [11] M. C. Mackey and L. Glass, Science 197 (1977) 287. [12] G. Stépán, T. Kalmar-Nagy,“Nonlinear regenerative machine tool vibrations”, Proc. DETC97, 1997. [13] G. Stépán,“Modelling nonlinear regenerative effects in metal cutting”, Phil. Trans. R. Soc. Lond. A (2001), 359 739-757. [14] S. Engin and Y. Altintas,“ Mechanics and dynamics of general milling cutters.: Part I: helical end mills”,Int. J. of Machine Tools and Manu. 41, (2001), 2195-2212. [15] S. Engin and Y. Altintas, “Mechanics and dynamics of general milling cutters.: Part II: inserted cutters”, Int. J. of Machine Tools and Manu. 41 (2001), 2213-2231. [16] Y. Altintas and E. Budak,“Analytical prediction of stability lobes in milling”, Annals CIRP 44 (1995) 357-362. [17] T. Insperger, B.P. Mann, G. Stépán, P.V. Bayley, “Stability of up-milling and down-milling, Part 1: Alternative analytical methods”, International Journal of Machine Tools and Manufacture 43 (2003) 25-34. [18] B.P. Mann, T. Insperger, P.V. Bayley, G. Stépán, “Stability of up-milling and down-milling, Part 2: Experimental verification”, International Journal of Machine Tools and Manufacture, 43 (2003) 35-40. [19] P.V. Bayly, M.T. Lamar, and S. b. Calvert,“Low frequency regenerative vibrations and the formation of lobed holes in drilling”, ASME J. Man. Sci. and Eng 124 (2001) 275-285. [20] N. Sri Namachchivaya and H. J. Van Roessel, “A Center Manifold Analysis of Variable Speed Machining”,Journal of Dynamical Systems,18, 2003, pp. 245-270. [21] N. Sri Namachchivaya, and R. Beddini, “Spindle Speed Variation for the Suppression of Regenerative Chatter”, Journal of Nonlinear Science 13 (2003) 265–288. [22] E. Stone and A. Askari (2002) “Nonlinear models of chatter in drilling processes”, Dynamical Systems, Vol. 17 No. 1, 65-85. [23] E. Stone, S. A. Campbell,“Stability and bifurcation analysis of a nonlinear DDE model for drilling”, J. Nonl. Science 14 (2004), 27-57. [24] H. Gang, T. Ditzinger, C. Z. Ning, and H. Haken, Phys. Rev. Lett. 71 807 (1993). [25] Stochastic Dynamics, H. Crauel and M. Gundlach, eds. Springer-Verlag, New York, (1999). [26] L. Arnold, N. Sri Namachchivaya and K. Schenk-Hoppe, Toward an understanding of the stochastic Hopf bifurcation: a case study, Int. J. Bif. Chaos 6 (1996), 1947-1975. 12 [27] M.M. Klosek and R. Kuske, “ Multiscale analysis of stochastic delay-differential equations”, SIAM Multi. Model. Sim. 3, 2005, 706-729. [28] C. T. H. Baker and E. Buckwar, “Numerical analysis of explicit one-step methods for stochastic delay differential equations LMS J. Comput. Math 3 (2000) 315-335. [29] E. Buckwar and R. Winkler,“Multi-step Maruyama methods for stochastic delay differential equations”, in review. [30] G. Stépán, Retarded Dynamical Systems, Longman, London. [31] P. H. Baxendale and L. Goukasian,“Lyapunov exponents for smal l random perturbations of Hamiltonian systems”, Ann. Prob. 30 2002, 101-134. [32] H. Crauel, I. Matsikis, and S. Townley, “Noise assisted high-gain stabilization: Almost surely or in second mean”, SIAM Journal of Control and Optimization 42 (2003) 1834–1853. 13