Multiple-Scales Approximation of a Coherence Resonance Route to Chatter
advertisement

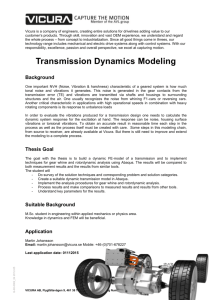
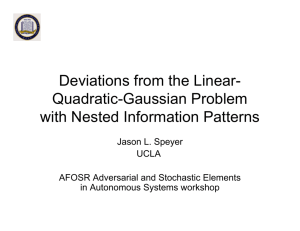
NOISE AND SIGNAL INTERACTION Multiple-Scales Approximation of a Coherence Resonance Route to Chatter This article considers the effect of random variation in the material parameters of a model of machine tool vibrations—specifically, it examines a model of regenerative chatter. I n contrast to deterministic models, which predict certain regimes for a machine tool’s stable equilibrium position, a stochastic model shows that noise can cause significant stochastic variation in the tool’s position, leading to transitions from an equilibrium state to one of chatter. A reduced model—obtained by using a multiple-scales method adapted for stochastic dynamics—can capture the mechanism for these amplified oscillations via coherence resonance and provide an efficient computational method for the probability density of the machine tool’s position. This article gives the full model and shows how a multiple-scales approach leads to a reduced system that can describe the chatter’s sustained amplification. A reduction provides an efficient semi-analytical approach for computing the dynamics: simulations of the behavior via the reduced system are a factor of ⑀–2 faster than simulations of the original system, where ⑀–1 is the oscillations’ amplification factor. We’ll also compare these results via computations of the probability densities and see how noise plays a role in the global dynamics. 1521-9615/06/$20.00 © 2006 IEEE Copublished by the IEEE CS and the AIP RACHEL KUSKE University of British Columbia, Vancouver 50 Vibrations Machine tool vibrations, commonly known as chatter, are essentially self-induced oscillations in a machining process, such as metal cutting, milling, or drilling. In addition to causing damage, chatter can also lower productivity and precision. Recent technological improvements, particularly those related to high-speed machining, have contributed to the varied sources of chatter. New directions in virtual machine tools rely on modeling and computational power, with chatter prediction serving as a crucial building block in the design of an efficient machining process.1 Early efforts by J. Tlusty2 and S.A. Tobias3 illustrate why these vibrations are inherent in the system: the force on the tool depends on the previous cut, as illustrated in Figure 1. Variations in the cut’s thickness from the previous rotation can feed back into the system and excite further vibrations, thus the term regenerative chatter. Consequently, mathematical models for machine tool vibrations must involve a delay, representing the time of one revolution of the work piece. Delays naturally give rise to oscillatory and even chaotic behavior, depending on the model.4–10 The dynamics of machine tool vibrations have been studied from a variety of perspectives, including analysis, computation, and experiment.11–19 Additional studies have considered variable speed,20,21 nonlinear effects on frequency,19,22 and COMPUTING IN SCIENCE & ENGINEERING the geometry of the cutting, which can change the bifurcation structure.23 Most analytical and computational studies focus on deterministic dynamics, but in contrast to deterministic models (which predict stability for the equilibrium position in certain parameter regimes), stochastic models capture a significantly different behavior, in which the interaction of noise and intrinsic oscillations can amplify otherwise-damped vibrations. It’s thus crucial to understand the variation in the tool’s position, which can be done via its probability density. In a stochastic setting, the collection of both computational and analytical methods for models with memory is limited. However, a multiple-scales method provides a reduced stochastic model that can capture the mechanism for the noise-induced amplification of the vibrations and provide an efficient computational approach for the probability density of the machine tool’s position. A simple model demonstrates this phenomenon: Inherent damped vibrations of the machine tool Chip thickness Tool Tool location at previous cut Tool location at present cut Figure 1. Delay and the cutting process. The inset shows the setting in which the work piece is rotated with the tool held fixed. The force on the tool depends on the work piece’s chip thickness and the difference between previous and present tool positions. 1.0 0.8 dx = y dt 0.6 dy = (–2y – x + c1(x(t – ) – x(t)))dt + ␦dw(t), (1) MAY/JUNE 2006 0.2 x which is the linearized equation for variations x from a desired chip thickness due to vibrations. Note that this equation describes a spring with damping coefficient , subject to both a force proportional to chip thickness x(t – ) – x(t) with coefficient c1, a non-dimensionalized material parameter, and noise, where w is a standard Brownian motion. Here, is a delay due to the cutting tool’s rotation, as illustrated in Figure 1. Later, we’ll see that this linearized model captures the amplification of the intrinsic oscillations, which play a dominant role in transitions from equilibrium states to larger vibrations. Figure 2 shows simulation results for Equation 1 in a setting in which the oscillations would decay to zero in the absence of noise—we choose the parameters in the region in which the equilibrium (x = 0) solution is stable in the deterministic case. This phenomenon is known as autonomous stochastic resonance or coherence resonance: the presence of noise causes a resonance that sustains otherwise-damped oscillations. Although the sustained oscillations are noise-induced, they have a dominant regular frequency that can be verified by a standard computation of the power spectral density (not shown), which is strongly peaked at a particular frequency. The amplitude or envelope of these oscillations has significant variation—in fact, an order of magnitude larger than the actual noise level. The noise coefficient for both simulations is ␦ = .05, whereas 0.4 0.0 –0.2 –0.4 –0.6 –0.8 –1.0 175 180 185 190 195 200 t Figure 2. Numerical simulation of Equation 1 for =.05, ␦ =.05, and = 66 for large time with a small initial condition. The blue line corresponds to c1 = .07, and the pink line is c1 = .11, which is closer to the deterministic stability boundary of the equilibrium x = 0. the maximum amplitude regularly observed in the oscillations increases from approximately |x| ~ .2 for c1 = .07 to |x| ~ .7 for c1 = .11. Researchers have studied coherence resonance in several contexts, with and without delays.4–8 However, few analytical methods have been developed for problems with delays and noise: computational methods are typically slow, and the computational error in the noise-sensitive regime can induce additional oscillations that interfere with the coherence resonance phenomenon. A 51 multiple-scales analysis can uncover the mechanism for noise-amplified oscillations by showing that the main factors are the noise’s resonance with the primary oscillation mode and its close proximity to the steady state’s stability boundary. In the context of regenerative chatter, the complex stability regions found for uniform cutting suggest that it can be advantageous to operate near these stability boundaries for steady, nonoscillatory behavior. However, analysis of the resonance effect also shows that vibrations can be amplified in parameter regimes near these stability boundaries, capturing the variability with an explicit noise amplification factor inversely proportional to the square root of the distance in parameter space from the stability boundary.24 The Model Let’s begin with the one-degree-of-freedom model for machine tool dynamics, which is discussed in detail elsewhere:11 d 2z ds 2 + 2ακ F( f ) dz + α 2z = . ds m ds 2 + 2ακ F( f ) dz + α 2z = . ds m (2) (3) The functional form of the force F is determined experimentally, in which the cutting force is viewed as an empirical function of the physical parameters.2,3,11 Under ideal circumstances, the machine tool will stay uniformly at this equilibrium position z0. To consider variations about the equilibrium position z = z0, and how they translate into vibrations in the machine tool position, we must introduce the nondimensional variables z = z0(1 + x), t = ␣s. (4) We write the force F in terms of actual chip thickness f = f0 + (f – f0), expressing the chip thickness variation f – f0 as the difference of the tool-edge position delayed by one rotation z(t – ) and the present position z(t). Substituting this into the expression for force (Equation 3), we can obtain a 52 dx = y dt 3 ⎛ ⎞ dy = ⎜ −2κ y − x + ∑ c j [ x ( t − τ ) − x ( t )] j ⎟ dt ⎝ ⎠ 1 3 +δ dw + ∑ c j [ x ( t − τ ) − x ( t )] j δ dw, (5) 1 Here, z is the machine tool position, is the damping factor, and ␣2 = ks/m is the ratio of stiffness ks to m mass of the machine tool, so ␣2 gives the natural frequency of the undamped system’s oscillations— that is, the machine tool’s natural vibrations. In general, the cutting force F is adjusted so that an equilibrium position z0 corresponds to a desired equilibrium chip thickness f0: d 2z reasonable approximation by using a Taylor series of F(f0 + [z(t – ) – z(t)]) about z(t – ) – z(t) = 0, keeping terms up to [z(t – ) – z(t)]3.11,23 To model variations in the material properties, we write K = K0(1 + ), with viewed as a percentage of K0. We model with white noise that has a coefficient ␦ << 1 as a simple model for variations in the material properties encountered in the cutting process. The choice for is convenient for analyzing delay-differential models,24 but we see a similar phenomena if we use colored noise. Substituting these expressions for the force and variation in Equation 2, and writing the second-order equation as a first-order system, we get where c1 = K 0w 3 1 c , c2 = − 1 , 2 1 4 / 4 ( mα f 0 ) 8 f0 c3 = 5 c1 2πα ,τ = , 96 f 02 Ω (6) with representing the rotating work piece’s angular velocity. Complete details of the derivation appear elsewhere.25 We take ␦ in the range .01 < ␦ < .15 as representative of typical variations in material properties. Equation 5 describes the variation |x| as a percentage of the desired tool position z0. The key parameters are the delay , proportional to the inverse rotational frequency, c1, the non-dimensionalized material parameter, and ␦, the percentage of variation in material properties. Next, we’ll examine a reduced model and compare it with numerical simulations for fixed damping = .05, considering a range of c1 and ␦ and a few different values for .25 Multiscale and Coherence Resonance The multiscale analysis described in this section demonstrates how the stochastic amplitude of the nearly regular oscillations is amplified. One important ingredient in this phenomenon is the proximity of the parameters to the linear stability boundary of the equilibrium x = 0. As Figure 2 shows, for the same noise level, the oscillations’ amplitude increases as c1 approaches this stability boundary (see Figure 3), even though the noise level remains the COMPUTING IN SCIENCE & ENGINEERING 0.115 c1 0.110 0.105 0.100 35 40 45 50 55 τ 60 65 70 75 Figure 3. Stability boundary for the zero solution in Equation 7. The equilibrium at x = 0 is stable for parameter values below these curves. The series of curves is a result of the periodicity et in Equation 8 for = i. same. Another important ingredient is the noise’s resonance with the tool position’s intrinsic oscillations. We can see this in the derivation of the amplitude equation, which also provides a reduced model for efficient computations of the dynamics. the dimensional parameters K0 and in terms of c1 and , respectively; the stability boundary then shows how advantageous it is to operate at certain values of , which should be stable for a larger range of the material parameter K0. Linear Stability Multiscale Analysis and Resonance The stability boundary for the deterministic system has appeared in previous work.11,26 Here, we consider the system in Equation 5, linearized about the steady state equilibrium x = 0 (corresponding to no chatter, with ␦ = 0). This linearization yields The linear stability analysis given earlier illustrates that for values near the neutral stability curve—for example, for c1 = c1c + ⑀ 2c12 for ⑀ << 1—the eigenvalue in Equation 8 has the form ~ ⑀2r + i( + ⑀ 22). Here, we can obtain the real part ⑀2r and correction to the frequency ⑀ 22 via a straightforward perturbation expansion of Equation 8 for c1 = c1c + ⑀ 2c12. The real part of is small (O(⑀ 2)), and r < 0 for c12 < 0—that is, for values c1 < c1c below the stability boundary. Without noise (␦ = 0), we have a slow time scale T = ⑀2t for the decay of perturbations with critical frequency . As we’ll see later, the introduction of a slow time scale is indeed critical for obtaining a reduced system that can describe the noise’s coherence resonance with oscillations. An approximation of the solution of Equation 5 via a stochastic multiscale analysis captures the main features of the dynamics. Particularly in the region below the stability boundary for the steady state, we observe the following noise-induced oscillations by using the linearization of Equation 5, d 2x dt 2 + 2κ dx + x = c1 ( x ( t − τ ) − x ( t )) . dt (7) Substituting x = et, we get the characteristic equation 2 + 2 + 1 = c1(e– – 1). (8) The stability boundary is determined by finding the curves satisfied by the equations for the real and imaginary parts of Equation 8 for = i. Figure 3 shows these curves in terms of the nondimensional parameters c1 and . The linear stability criteria obtained from Equation 8 indicates that for a given value of , a critical value c1c exists on the stability curve in Figure 3, as does a corresponding frequency , both obtained from Equation 8 with = i. This point corresponds to a Hopf bifurcation.12 For values of the material parameter c1 < c1c, the equilibrium solution x = 0 is stable, and oscillations decay; for c1 > c1c, the equilibrium is unstable, and oscillations with frequency are sustained. Notice that in certain values of , the steady equilibrium state is stable over a larger range of c1. We can write MAY/JUNE 2006 dx = y dt dy = (–2y – x + c1[x(t – ) – x(t)])dt + ␦dw + c1[x(t – ) – x(t)]␦dw. (9) Here, we’ve dropped the nonlinear terms—that is, we take c2 = c3 = 0, which is an appropriate approxi- 53 slow time scale. We obtain a reduced system for A and B by using the multiple-scales method, which is based on the approximation that treats the fast and slow time scales, t and T, as independent.27 This assumption is valid when the time scales are “separate”—that is, ⑀ << 1 so that T is indeed slow compared to t. Equation 10 describes the amplification of the noise in the oscillation with a nearly deterministic frequency , and the resulting reduced system gives an efficient means for computing an approximate probability density function over the long time scale T. The ansatz, or proposed, form for the equations for A and B is 5.0 4.5 4.0 3.5 p (x) 3.0 2.5 2.0 1.5 1.0 ⎛ dA⎞ ⎛ ψ A ⎞ ⎛ σ11 σ12 ⎞ ⎛ dξ1 (T ) ⎞ ⎜⎝ dB ⎟⎠ = ⎜⎝ ψ ⎟⎠ dT + ⎜⎝ σ ⎟⎜ ⎟ B 21 σ 22 ⎠ ⎝ d ξ2 (T )⎠ 0.5 0.0 –0.5 –0.4 –0.3 –0.2 –0.1 0.0 0.1 0.2 0.3 0.4 3 ⎛ A⎞ ⎛ d β j1 (T ) ⎞ +∑ Σ j ⎜ ⎟ ⎜ ⎟, ⎝ B ⎠ ⎝ d β j 2 (T )⎠ j =1 0.5 x Figure 4. Comparison of the stationary probability density p(x) for ␦ = .02 computed from Equation 9. This linear system includes multiplicative noise (blue line) and uses the multiple-scales approximation, computed via Equation 11 (pink diamonds). mation in this region for small deviations from x = 0. The analysis in Equation 9 leads to a reduced system and demonstrates the impact of the noise’s resonance with the primary mode, which has frequency (obtained in the previous section). This lets us focus on resonance for small perturbations around the equilibrium steady state while temporarily neglecting other large-amplitude states that exist in the fully nonlinear system. Later, we’ll discuss the implications of this resonance in the full system. We use the approximation where i and ji are independent standard Brownian motions. The multiscale analysis’ goal is to derive the equations and Equation 11’s drift coefficients A and B and diffusion coefficients, the matrices j and constants ij. The analysis also demonstrates that the ansatz for the form of the amplitude equations in Equation 11 is indeed consistent. For clarity, let’s review the results here (details of the analysis appear in the “Appendix” sidebar). (f 2 1 ) + ( 2κω cos ωτ − ω sin ωτ )( c1c ∆B + c12B − c12 (ω A + 2κ B ))] + f1[( c1c ∆A + c12 A)( 2κω cos ωτ − ω sin ωτ − ( c1c ∆B + c12B )(ω cos ωτ + 2κ sin ωτ ) − c12 ( −ω B + 2κ A)] (10) where T = ⑀ 2t. As described earlier, c1c and correspond to a fixed delay , and c12 < 0 (for the remainder of this article, c12 = –1 without loss of generality). The multiscale form for x and y in Equation 10 is identical to that used for the leading order in a deterministic system near a Hopf point,27 but the difference here is that the slowly varying amplitudes A and B must capture stochastic behavior. Equation 10 also reflects the stochastically modulated oscillation with fixed frequency , which is consistent for small noise—that is, ␦ << 1 in this setting. The goal is to obtain equations for the amplitude or envelope described by A(T) or B(T) on the 54 )( + f 22 ω 2 + 4κ 2 ψ A = − f 2[( c1c ∆A + c12 A)(ω coss ωτ + 2κ sin ωτ ) x(t) ~ A(T)cos t + B(T ) sin t y(t) ~ –A(T )sin t + B(T)cos t , (11) (f 2 1 )( (12) ) + f 22 ω 2 + 4κ 2 ψ B = f1[( c1c ∆A + c12 A)(ω cos ωτ + 2κ sin ωτ ) + ( 2κω cos ωτ − ω sin ωτ )(c1c ∆B + c12B − c12 (ω A + 2κ B ))] + f 2[( 2κω cos ωτ − ω sin ωτ )( c1c ∆A + c12 A) − ( c1c ∆B + c12B )(ω cos(ωτ ) + 2κ sin(ωτ )) − c12 ( −ω B + 2κ A)] (13) COMPUTING IN SCIENCE & ENGINEERING APPENDIX L et’s combine two sets of equations for dx and dy, which yields equations for the drift coefficients A and B and diffusion coefficients ij in the main text’s Equation 11. The first uses Ito’s formula, which relates dx and dy to dA and dB, dx = ∂x dx dx + dA + dB ∂t dA dB = –Asin t dt + cos t[AdT + 11d1(T) + 12d2(T)] + sin t[BdT + 21d1(T) + 22d2(T)], (A) and similarly for dy. Terms such as d2x/dA2 and d2x/dB2 don’t appear here, due to Equation 10. Substitution of Equation 10 into Equation 9 gives a second expression involving dx and dy: dx = –(Asint – Bcost) dt dy = [2(Asint – Bcost) – (Acost + Bsint) + (A(T – ⑀2)cos(t – ⑀2) + B(T – 2)sin(t – ⑀2) – (Acost + Bsint)]dt + ␦dw(s). (B) Only the additive noise is retained in these equations. As Figure 4 verifies, we have good agreement between the system-approximated density (with additive noise only) and the density for the system with both additive and multiplicative noise. Thus we’ve confirmed that additive noise plays the dominant role in the dynamics for the regime considered in the main text, so we can neglect the multiplicative ∆A(T ) = ∆B(T ) = f1 = 1 + A(T − ε 2τ ) − A(T ) ε2 B (T − ε τ ) − B (T ) ω 2 + 4κ 2 , f2 = 2κω ω 2 + 4κ 2 (14) (15) The coefficients A and B give the decay of the oscillations’ amplitude in the absence of noise for c12 < 0. The noise terms are given by f12 + f 22 2 ω + 4κ σ 2 11 f12 + f 22 2 ω + 4κ σ 2 12 MAY/JUNE 2006 = p2 f1 δ , ε ω p2 + p2 1 2 =− δ − p1 f1 ε ω p2 + p2 1 2 2π /ω ∫0 dx (Eq.A )u j + dy (Eq.A )v j dt = dx (Eq.B )u j + dy (Eq.B )v j dt j = 1, 2, (C) where subscripts refer to Equations A and B, and (uj, vj) for j = 1, 2, are the two solutions to the adjoint linear problem for Equation 9 with ␦ = 0, continued on p. 57 (2 + 42)p1 = f1 + 2f2 2 ω2 2π /ω ∫0 21 = –12, 22 = 11 , ε2 noise terms in the analysis. To determine the equation for A and B, we equate dx and dy from Equations A and B, write c1 = c1c + ⑀2c12 for c12 < 0 in Equations A and B, and use a perturbation expansion for ⑀ << 1 for the drift terms. The leading order (O(1)) terms cancel because we have the linear homogeneous equation with c1 = c1c and Equation 10, meaning we treat A and B as constants to the leading order in the multiscale expansion. The next order corrections are O(⑀2), leaving the drift terms with coefficient ⑀2dt = dT. The leading order diffusion (noise) terms have coefficient ␦ << 1. The resulting system includes terms that vary on both the t and T time scales. To obtain the coefficients in Equation 10, which are functions of T only, we use a projection on the fast oscillations with frequency , defined as the inner product of (dx, dy) with the solutions to the adjoint of the homogeneous linear equation with c1 at the critical value of c1c for deterministic systems.1 As is typically used in multiple-scales analysis for deterministic systems, the inner product has the form (16) (2 + 42)p2 = f2 + 2f1. (17) For the purposes of our discussion here, we show only the additive noise terms. Note that these terms have a coefficient of ␦/⑀, indicating the ⑀–1 amplification of the noise is due to parameters in close proximity to the equilibrium position’s stability boundary. The drift coefficients A and B include terms that depend on the delayed time T = ⑀2t, so, in general, we must determine the behavior of A and B numerically from Equation 11. As described in the Appendix, the terms in Equation 11 with coefficient j are higher-order corrections, so we don’t include them here. Figure 4 compares the numerical calculation for the stationary probability density p(x) obtained from Equation 9 (with both multiplicative and additive noise) and the multiscale approxi- 55 1.5 Maximum amplitude 1.0 Large-amplitude stable oscillation x 0.5 0.0 –0.5 Small-amplitude unstable oscillation –1.0 Zero solution (stable) (a) Control parameter (c1) –1.5 2,200 2,250 (b) 2,300 2,350 2,400 2,450 2,500 t Figure 5. Implications of coherence resonance. (a) Branch for a subcritical bifurcation from the zero state. For subcritical values of the control parameter, such as the material parameter c1, noise can cause a transition to stable, large-amplitude oscillations through a resonance response that allows significant variation beyond unstable, small oscillations. (b) Realization of the nonlinear system in Equation 5 with a small initial condition, = 65, and c1 =.104. Without noise (blue line), the solution decays slowly to the state x = 0. For ␦ = .05 (pink line), the coherence resonance causes a transition from small-amplitude oscillations to large-amplitude ones. mation obtained from Equations 11 through 17 (that is, with only additive noise). The good agreement shows that in this regime, the additive noise plays the dominant role in amplifying the oscillations of x, which are a percentage of the equilibrium z0. The variance is an order of magnitude larger than the noise factor ␦ (in this case, ␦ = .02), reflecting amplification of the noise for parameter values near the stability boundary in Figure 3, in which the equilibrium steady state loses stability to the chatter oscillation. Although the parameter values are in the stability regime for the deterministic equilibrium, the oscillations are sustained and have an amplification factor related to ⑀–1, where ⑀ measures proximity to the stability boundary. We obtain the approximate stationary densities by running simulations over a sufficiently long time for 5,000 realizations. Note that the calculations using the multiscale approximation are for A and B on the T = ⑀–2t scale, so the computations for the multiscale approximation are a factor of O(⑀–2) faster than the full system simulation on the t scale. The numerical simulations used both the EulerMaruyama equation and the multistep methods for stochastic delay differential equations.28 By using a higher-order method, we can verify that the oscillations aren’t a result of the numerical method. 56 Additional simulations appear elsewhere27 for ranges of ␦ and c1; the behavior of the densities for these other cases is similar. Implications for Oscillations in the Nonlinear System Figure 5 illustrates the implications of coherence resonance in the linear system for realizations of the fully nonlinear system. A typical bifurcation structure for the full system is that of a subcritical bifurcation, which is found in several studies of deterministic models for machine tool vibrations.11,22,23 For this setting in the absence of noise, small perturbations from the zero state are damped because small oscillations are unstable. In the stochastic setting for parameter values near the bifurcation, analysis and computations of the linear system show small oscillations that are amplified through coherence resonance. The noise level ␦ is amplified by a factor ⑀–1, related to the distance from the critical bifurcation value. Once these oscillations are large enough, the nonlinear system can make the transition to a branch of large-amplitude behavior, as shown in Figure 5a. The coherence resonance in the stochastic system thus provides a mechanism by which the tool behavior can shift to a nonlinear mode, and for large enough x, the tool can even lose contact with the work COMPUTING IN SCIENCE & ENGINEERING continued from p. 55 For (u, v) = (u2, v2) in Equation C, we get ω ⎛ ⎞ cos ωt ⎟ ⎜ sinωt , 2 2 ω κ + 4 ⎟ (u1,v1) = ⎜ 2κ ⎜ ⎟ ω + sin t ⎟⎠ ⎝⎜ ω 2 + 4κ 2 [(2 + 42)B + 2B + 2KA]dT ~ (c12[B(T)(2cos – sin) – A(T)(2sin + cos) – 2B – A] + c1c[B(2cos – sin) – A(T)(2sin + cos)])dT. (G) 2κ ⎛ ⎞ cos ωt ⎟ ⎜ cos ωt , 2 2 ω + 4κ ⎟ (u2 ,v 2 ) = ⎜ ω ⎜ ⎟ + sin t ω ⎟⎠ . ⎝⎜ ω 2 + 4κ 2 (D) Under the assumption of multiple scales, we treat terms on the slow scale T as independent of the fast time t in Equation C, so the integration over t reduces to integrals of products of cost and sint. We treat the drift and diffusion coefficients separately, starting first with the drift coefficients with coefficient dT. To obtain the drift coefficients A and B for (u, v) = (u1, v1) in Equation C, we get [( + 4 )A + A + 2KB]dT ~ (c12[A(T)(2cos – sin) – B(T)(2sin + cos) – 2A + B] + c1c[A(2cos – sin) – B(T)(2sin + cos)])dT. (E) 2 2 2 2 dw = δ [cos ωtdW1(T ) + sinωtdW2 (T )] , ε (H) where W1 and W2 are independent Brownian motions. Then the equations for the noise terms from Equation C are 2π /ω ∫0 [u j (σ 11d ξ1(T ) + σ 12d ξ2 (T )) +v j (σ 21d ξ1(T ) + σ 22d ξ2 (T ))]dt = ⎡δ v j ⎢ (cos ωtdW1(T ) ⎣ε + sinωtdW2 (T ))]dt , j = 1, 2 2π /ω ∫0 . (I) Using Equation D in Equation I, we get equations from which we can determine the diffusion coefficients in Equation 11. Here, we’ve written ⑀2dt = dT and A(T − ε 2τ ) = A(T ) + ε 2 Combining Equations E and G, we get the coefficients A and B given in Equations D and E. For the noise terms, we write dw in terms of T using properties of Brownian motion: A(T − ε 2τ ) − A(T ) ≡ A(T ) + ε ∆A(T ) Reference ε2 , (F) 1. J. Kevorkian and J.D. Cole, Perturbation Methods in Applied Mathematics, Springer-Verlag, 1985. treating A(T) = O(1) and using similar expressions for B(T – ⑀2). piece intermittently. In this case, we must analyze a more complex model that allows for periods during which the tool might skip.14 Figure 5b demonstrates the transition to a nonlinear mode with large oscillations for the full nonlinear system and compares the realization of the system for parameters in the stability range for the zero solution, with and without noise. In the absence of noise, the system’s oscillations damp out to zero (red line), pushing the system to steady state. However, even with small noise (in this case, ␦ = .05), we see that small oscillations are amplified (green line), so that eventually the system makes the transition to oscillations with O(1) amplitude. Indeed, experiments show sustained oscillations for parameters in the deterministic stable regime near the stability boundary,14 suggesting that noise could contribute to the dynamics. Once the system makes a transition to large os- MAY/JUNE 2006 cillations, the multiplicative noise contributes to the irregularity; the additive noise doesn’t influence the dynamics as much because it’s relatively small. We leave a complete exploration of the fully nonlinear noisy system for future work; it depends on the development of new approaches for analyzing fully nonlinear systems with noise and memory. W e’ve seen that certain critical combinations of noise levels and parameter regimes near stability boundaries can allow and even promote transitions between different bistable states. Even if the system is operating in a regime in which we might expect the equilibrium state to be linearly stable, small noisy perturbations can be amplified through coherence resonance. This amplification is of central importance in practical set- 57 tings, where it can cause transitions to large-amplitude states or chatter. A multiple-scales analysis yields a means for efficient computation of the probability density for a machine tool’s position. This density is the basis for quantities that can describe the system’s state: density, for example, can help us calculate the likelihood that the variations x exceed a threshold xc, corresponding to the transition to chatter,25 or estimate the time in which such a transition might occur. In this case, the amplification factor indicates that this transition can occur on a O(1) time scale, so we can use the analysis to predict parameter regimes in which such a transition is likely to be observed. Generalizations of the approach show promise in biological modeling—in particular, studies of periodic recurrence of epidemics due to random variations in populations and in noise-induced neuronal activity and synchronization. It has also been applied in nonlinear settings, such as logistic models and large-amplitude oscillations in neuronal bursting dynamics. Acknowledgments I thank Gabor Stepan for many helpful discussions. References 1. P. Zelinski, “The Dynamics of Better Drilling,” Modern Machine Shop, 2001; www.mmsonline.com/articles/060101.html. 2. J. Tlusty and L. Spacek, “Self-Excited Vibrations on Machine Tools,” (in Czech), Nakl. CSAV, 1954. 3. S.A. Tobias, Machine Tool Vibrations, Blackie, 1965. 4. J. Garcia-Ojalvo and R. Roy, “Noise Amplification in a Stochastic Ikeda Model,” Physics Letters A, vol. 224, 1996, pp. 51–56. 5. S. Kim, S.H. Park, and H.-B. Pyo, “Stochastic Resonance in Coupled Oscillator Systems with Time Delay,” Physical Rev. Letters, vol. 82, 1999, pp. 1620–1623. 6. J.L. Cabrera, J. Gorronogoitia, and F.J. de la Rubia, “Noise-Correlation-Time-Mediated Localization in Random Nonlinear Dynamical Systems,” Physical Rev. Letters, vol. 82, 1999, pp. 2816–2819. 7. T. Ohira and Y. Sato, “Resonance with Noise and Delay,” Physical Rev. Letters, vol. 82, 1999, pp. 2811–2815. 8. A. Longtin et al., “Noise and Critical Behavior of the Pupil Light Reflex at Oscillation Onset,” Physical Rev. A, vol. 41, pp. 6992–7005. 9. A. Beuter, J. Belair, and C. Labrie, “Feedback and Delays in Neurological Diseases: A Modeling Study Using Dynamical Systems,” Bulletin of Mathematical Biology, vol. 55, 1993, pp. 525–541. 14. T. Insperger and G. Stepan, “Vibration Frequencies in HighSpeed Milling Processes or a Positive Answer to Davies, Pratt, Dutterer and Burns,” J. Manufacturing Science & Eng., vol. 126, 2004, pp. 481–487. 15. S. Engin and Y. Altintas, “Mechanics and Dynamics of General Milling Cutters, Part II: Inserted Cutters,” Int’l J. Machine Tools and Manufacturing, vol. 41, 2001, pp. 2213–2231. 16. //authors?//, “Analytical Prediction of Stability Lobes in Milling,” Annals CIRP //au: please spell out?//, vol. 44, 1995, pp. 357–362. 17. T. Insperger et al., “Stability of Up-Milling and Down-Milling, Part 1: Alternative Analytical Methods,” Int’l J. Machine Tools and Manufacturing, vol. 43, 2003, pp. 25–34. 18. B.P. Mann et al., “Stability of Up-Milling and Down-Milling, Part 2: Experimental Verification,” Int’l J. Machine Tools and Manufacturing, vol. 43, 2003, pp. 35–40. 19. P.V. Bayly, M.T. Lamar, and S.B. Calvert, “Low Frequency Regenerative Vibrations and the Formation of Lobed Holes in Drilling,” J. Manufacturing Science & Eng., vol. 124, 2001, pp. 275–285. 20. N. Sri Namachchivaya and H.J. Van Roessel, “A Center Manifold Analysis of Variable Speed Machining,” J. Dynamical Systems, vol. 18, 2003, pp. 245–270. 21. N. Sri Namachchivaya and R. Beddini, “Spindle Speed Variation for the Suppression of Regenerative Chatter,” J. Nonlinear Science, vol. 13, 2003, pp. 265–288. 22. E. Stone and A. Askari, “Nonlinear Models of Chatter in Drilling Processes,” Dynamical Systems, vol. 17, no. 1, 2002, pp. 65–85. 23. E. Stone and S.A. Campbell, “Stability and Bifurcation Analysis of a Nonlinear DDE Model for Drilling,” J. Nonlinear Science, vol. 14, 2004, pp. 27–57. 24. M.M. Klosek and R. Kuske, “Multiscale Analysis of Stochastic Delay-Differential Equations,” SIAM J. Multiscale Modeling and Simulation, vol. 3, 2005, pp. 706–729. 25. E. Buckwar et al., “Noise-Sensitivity in Machine Tool Vibrations,” to appear in Multiscale Modeling and Simulation; www.math. ubc.ca/ rachel/papers. 26. G. Stepan, Retarded Dynamical Systems, Longman, 1989. 27. J. Kevorkian and J.D. Cole, Perturbation Methods in Applied Mathematics, Springer-Verlag, 1985. 28. E. Buckwar and R. Winkler, “Multi-Step Methods and Their Application to Problems with Small Noise,” to be published in SIAM J. Numerical Analysis; preprint at http://wws.mathematik.huberlin.de/~buckwar/publications.html. Rachel Kuske is an associate professor in the Department of Mathematics, University of British Columbia, Canada. Her technical interests include stochastic models, applied nonlinear dynamics, and mathematical modeling. Kuske has a PhD in applied mathematics from Northwestern University. She is a member of SIAM, the Canadian Applied and Industrial Mathematics Society, the Canadian Mathematical Society, and the Association for Women in Mathematics. Contact her at rachel@math.ubc.ca. 10. M.C. Mackey and L. Glass, //au: article title?//, Science, vol. 197, 1977, pp. 287–289. 11. G. Stepan and T. Kalmar-Nagy, “Nonlinear Regenerative Machine Tool Vibrations,” Proc. ASME Biennial Conf. Mechanical Vibration and Noise, ASME, 1997, pp. 1–11. 12. G. Stepan, “Modelling Nonlinear Regenerative Effects in Metal Cutting,” Philosophical Trans. Royal Soc. London A, vol. 359, 2001, pp. 739–757. 13. S. Engin and Y. Altintas, “Mechanics and Dynamics of General Milling Cutters, Part I: Helical End Mills,” Int’l J. Machine Tools and Manufacturing, vol. 41, 2001, pp. 2195–2212. 58 COMPUTING IN SCIENCE & ENGINEERING