Characterization of Nb Sn Superconducting Strand
advertisement

Characterization of Nb 3 Sn Superconducting Strand
Under Pure Bending
by
David L. Harris
B.S. Mechanical Engineering (2003)
Utah State University
Submitted to the Department of Mechanical Engineering
in Partial Fulfillment of the Requirements for the Degree of
Master of Science in Mechanical Engineering
at the
Massachusetts Institute of Technology
September 2005
0 2005 Massachusetts Institute of Technology
All right reserved
Signature of Author .....................................
Department of Mechanical Engineering
August 10, 2005
Cr-tified bIy ..................... ...
.....
..........
...
. .. . .
Joseph V. Minervini
Senior Research Engineer, MIT Plasma Science and Fusion Center
Nuclear Science and Engineering Department
Thesis Supervisor
.....................
ivseph L. Smith, Jr.
Samuel C. Collins Seniorjfpfessor of Mechanical Engineering
Thesis Supervisor
Certified by ..................
Accepted by ...............
............
...... ...........
Lallit Anand
Chairman, Department Committee on Graduate Students
MASSACHUSETTS INSTITU E
OF TECHNOLOGY
NOV 0 7 2005
LIBRARIES
BARKER
2
Characterization of Nb 3 Sn Superconducting Strand
Under Pure Bending
by
David L. Harris
Submitted to the Department of Mechanical Engineering
on August 10, 2005 in Partial Fulfillment of the
Requirements for the Degree of Master of Science in
Mechanical Engineering
ABSTRACT
Characterizing the strain-dependent behavior of technological Nb 3Sn superconducting strand has
been an important subject of research for the past 25 years. Most of the effort has focused on
understanding the uniaxial tension and compression effects and applying this information to
improve predictive scaling laws which are used for superconducting magnet design. However,
the strain state of the strand in an actual magnet winding is often a complicated combination
which includes uniaxial tension or compression, bending, and transverse compression.
A bending mechanism was designed and used to characterize the bending strain behavior of two
different types of Nb 3Sn superconducting strand at 4.2K in a magnetic field. Results showed that
the critical current of the strand increased up to an applied bending strain between 0.2-0.3% and
then decreased with continued applied strain.
Thesis Supervisor: Joseph V. Minervini
Title: Senior Research Engineer, MIT Plasma Science and Fusion Center
4
ACKNOWLEDGEMENTS
I want to express my gratitude to all those who contributed both
directly and indirectly to this thesis. Specifically, I want to thank
my advisor, Dr. Joseph V. Minervini for his mentorship and
guidance. He always made himself available when I had a
question or concern.
I am grateful for the many hours that Dr. Makoto Takayasu
invested in helping me. I learned much from working with him. I
am indebted to Professor Joseph L. Smith, Luisa Chiesa, Dave
Tracey, Darlene Marble, and Fred Cote for all of their assistance.
I am very grateful for my wife, Ellen, and her encouragement and
support. And to my children who always make me smile.
My work and schooling was supported by a National Defense
Science and Engineering Graduate (NDSEG) Fellowship which
was sponsored by the Department of Defense.
A portion of this work was performed at the National High
Magnetic Field Laboratory, which is supported by NSF
Cooperative Agreement No. DMR-0084173, by the State of
Florida, and by the DOE.
6
Table of Contents
Title P ag e ......................................................................................................
1
ABSTRACT ..................................................................
3
A cknowledgem ents ................................................................................
... . .. 5
T able of Contents ........................................................................................
. .7
L ist of F igures ...................................................................
. 11
17
L ist o f T ab les ................................................................................................
. . 19
Glossary of T erm s ......................................................................................
C h apter 1. Intro du ction ....................................................................................
23
1.1 History ......................................................................................
. . 23
25
1.2 Type II Superconductors ...................................................................
1.2.1 Theories of Superconductivity .................................................
1.3 Superconductor Development ...............................
29
....... 30
1.4 Production of Nb3Sn Strand .....................................
35
1.5 Cable-in-Conduit Conductor (CICC) ........................................................
40
1.6 Strain Behavior of Nb 3Sn .................................................................
46
1.6.1 Uniaxial Strain ..................................................................
. 47
1.6.2 Strain Scaling L aws ................................................................
52
1.6.3 Compound Strain ...............................................................
54
1.7 Thesis Objective ...........................................................................
Chapter 2. Analytical Development ...................................................................
. 58
59
2.1 M echanics of M aterials ........................................................................
59
2.2 Example Nb 3Sn Strand Bending ..........................................................
64
2.3 Differential Equation Approach to Large-Displacement Bending ...................
67
8
2.4 Geometric Verification of Pure Bending Relationship ................................
75
2.5 Error Minim ization ............................................................................
78
. 85
Chapter 3. Design .......................................................................................
3.1 Operating Conditions and Requirements ...............................
85
3.2 B en ding O peration .............................................................................
91
3.3 Test Sample Mounting System ...........................................................
95
96
3.3.1 Support Beam ........................................
3.3 .2 C urrent Joints ......................................................................
103
3.4 Strand H eat Treatm ent .......................................................................
105
3.5 Mechanism Gear Design ...
109
....................................
3 .6 P rob e Design ..................................................................................
Chapter 4. Specifications and Test Results ............................................................
1 14
119
4.1 M echanism Specifications .................................................................
119
4.2 Support Beam Specifications ...............................................................
124
4 .3 S train Gag es ...................................................................................
12 7
4.4 Bending Mechanism Verification .................................
129
4.4.1 Room Temperature Verification ...............................................
133
4.4.2 Liquid Helium Verification ...............................
135
4.5 NHMFL Facilities ...........................................
137
4.6 Sam ple Test Preparation .....................................................................
140
4.7 Sam ple Characterization .....................................................................
146
4.8 Critical Current Results ....................................................................
148
4.9 Bending Results ..........................
.....................
160
4 .10 S am p le Strain ....................................................................
........... 167
4.11 Conclusion .................................................................
176
4.12 Recommendations ................................................
177
9
APPENDIX A. Bending Error Estimates ..............................................................
181
APPENDIX B. Gear and Spline Calculations .........................................................
189
A PPEN DIX C . Draw ings ................................................................................
195
A PPEN DIX D . Photos ...................................................................................
22 1
APPENDIX E. Strand Heat Treatment .................................................................
235
APPENDIX F. Critical Current Test Results ..........................................................
241
Referen ces ...................................................................................................
24 7
10
List of Figures
Fig. 1.1. Critical superconductive surface ...........................................................
24
Fig. 1.2. Dissipative flux motion in a Type H superconductor ....................................
26
Fig. 1.3. (a) Flux penetration in a Type II superconductor, and
(b) picture of actual flux lattice .............................................................
27
Fig. 1.4. Flux pinning force comparison .............................................................
28
Fig. 1.5. (a) Bronze billet pattern, and (b) Multifilament drawing process ......................... 36
Fig. 1.6. Picture of bronze process strand ...........................................................
37
Fig. 1.7. (a) Internal Tin billet, and (b) Picture of unreacted Internal Tin strand ...............
38
Fig. 1.8. External tin billet arrangem ent .............................................................
38
Fig. 1.9. Twisting of superconducting strand ..........................................
39
Fig. 1.10. ITER Central Solenoid Model Coil Conductor .........................................
41
Fig. 1.11. CICC cross-section view showing a series of internal magnification stages ........... 42
Fig. 1.12. Computer model of ITER (International Thermonuclear Experimental Reactor) ..... 44
Fig. 1.13. Strain dependent critical current in the 45T Hybrid magnet strand
at 12T and 4.2K ........
...............................................
47
Fig. 1.14. Reduced critical current vs. intrinsic strain for OST internal tin wire .............
48
Fig. 1.15. U-spring strain device used at the University of Twente .................................
49
Fig. 1.16. Pacman strain device used at the University of Twente ................................
50
Fig. 1.17. The Walters Spring (WASP) device for measuring critical current
as a function of strain .......................................................................
. 51
Fig. 1.18. Ekin transverse strain mechanism ........................................................
55
Fig. 1.19. TARSIS periodical bending device ..........................................................
56
Fig. 1.20. Fixed bending strain behavior strand configuration ......................
57
Fig. 2.1. B eam in pure bending ........................................................................
60
Fig. 2.2. Deformation of a beam in pure bending: (a) side view of beam,
(b) deformed beam ...................
.........................
61
Fig. 2.3. Scaled drawing of example strand at maximum strain state ............................
66
12
Fig. 2.4. (a) Evolution of a beam through pure bending states, and
(b) Pure bending is independent of symmetric vertical motion ............................
68
Fig. 2.5. (a) Initially straight beam with rigid clamps, (b) Deformed beam, and
(c) H alf beam with sym m etry ..............................................................
71
Fig. 2.6. Pure bending motion of beam ends for the example strand ................................
75
Fig. 2.7. Beam deformed into a state of pure bending ..............................................
76
Fig. 2.8. (a) Side view of circular-type bending mechanism, and
(b) top view of circular-type bending mechanism .......................................
78
Fig. 2.9. Displacement at the beam end due to the lever arms ...................................
79
Fig. 2.10. Plot of nondimensional bending displacement error ......................
83
Fig. 3.1. Drawing of the 195mm bore, 20T Bitter resistive magnet and cryostat at the
National High Magnetic Field Laboratory (NHMFL) in Tallahassee, FL ................ 86
Fig. 3.2. Bending mechansim (a) complete mechanism, (b) with strand mounting system
removed, and (c) inner gear train ...................................
92
Fig. 3.3. Bending Mechanism Operation (a) 00 rotation angle, (b) 200 rotation angle,
(c) 400 rotation angle, and (d) 700 rotation angle for the Torque Arms ..........
94
Fig. 3.4. Strand Mounting System .............................................
95
Fig. 3.5. Support Beam Layout (a) Front View and (b) Back View ......................
97
Fig. 3.6. Stress-strain curves for Ti6A14V annealed 0.064 inch sheet at various
temperatures ...................................................................................
Fig. 3.7. Support Beam and test strand distances from neutral axis to outer surfaces ... ....
. 99
100
Fig. 3.8. Current joint design with (a) All Components, and (b) Cut-Away View ............... 104
Fig. 3.9. Strand Heat Treatment Fixture, (a) Fixture and Cap, (b) Main Fixture .....
..... 106
Fig. 3.10. Detail of heat treatm ent fixture end .........................................................
108
Fig. 3.11. Bending Mechanism ...............................................
109
Fig. 3.12. Bending Mechanism Gear Train ..................................
111
Fig . 3 .13 . Prob e design ...................................................................................
115
Fig. 3.14. Drawings of (a) cryostat, and (b) probe. All dimensions are in inches ................ 116
Fig. 4.1. Bending mechanism (a) with removable Torque Arms and (b) gear train .........
120
13
Fig. 4.2. Sample mounting assembly for OST (Eurpean) strand withf= 1.53 ................... 122
Fig. 4.3. (a) Current Joint mounting configuration, and (b) sample current-joint groove ...... 123
Fig. 4.4. Position of sample in Support Beam .........................................................
125
Fig. 4.5. (a) Sample side of the Support Beam, and (b) end of Support Beam
showing compensating grooves ...............................................................
Fig. 4.6. Room temperature test of bending mechanism .............................................
126
133
Fig. 4.7. Permanent deformation of Support Beam tested at room temperature .................. 134
Fig. 4.8. Probe and cryostat for the liquid helium bending mechanism verification test ........ 135
Fig. 4.9. Support Beam tested in liquid helium bath .................................................
136
Fig. 4.10. Cell 4 at the National High Magnetic Field Laboratory ............
137
..............
Fig. 4.11. Screen shot of testing control computer ...................................................
138
Fig. 4.12. B ending test probe ............................................................................
140
Fig. 4.13. Bending Mechanism and Sample Assembly attached to probe ......................... 141
Fig. 4.14. Flexible current lead wires ..................................................................
142
Fig. 4.15. (a) Attachment points for current lead wires, and (b) attached current lead wires ... 143
Fig. 4.16. Probe mounted on magnet cryostat .........................................
144
Fig. 4.17. Transferring liquid helium to the cryostat via the probe .................................
145
Fig. 4.18. Voltage-current plots for IGC 157 Sample #1 (a) 0.2% strain, and
(b ) 0 .1% strain .................................................................................
150
Fig. 4.19. (a) Current data, and (b) n-values for IGC 157 Sample #1 ..............................
153
Fig. 4.20. (a) Current data, and (b) n-values for IGC 157 Sample #2 ..............................
154
Fig. 4.21. (a) Current data, and (b) n-values for IGC 157 Sample #3 ..............................
155
Fig. 4.22. (a) Current data, and (b) n-values for EU 153 Sample #1 ...............................
156
Fig. 4.23. (a) Current data, and (b) n-values for EU 153 Sample #2 ...............................
157
Fig. 4.24. (a) Current data, and (b) n-values for EU 153 Sample #3 ...............................
158
Fig. 4.25. Measured bending strain for (a) IGC 157, and (b) EU153 beams ....................... 162
Fig. 4.26. Bending strain error for (a) IGC157, and (b) EU153 beams ............................
164
Fig. 4.27. Effect of Lorentz load on bending strain for (a) IGC 157, and
(b) EU 53 b eams ..............................................................................
166
14
Fig. 4.28. EUl 53 test samples (a) before testing, and (b) after testing .............................
168
Fig. 4.29. Offset between beam neutral axis and strand centerline
170
...................
Fig. 4.30. Conceptual method for adding tensile strains to bending strain ........................ 174
Fig. 4.31. Bearing surface of bending mechanism Input Shaft ......................................
179
Fig. A. 1. (a) Beam with uniform load and fixed supports, and (b) moment distribution ........ 187
Fig. C.1. B ending m echanism model ...................................................................
195
Fig. C.2. Bending Mechanism Parts List ...................................
196
Fig. C.3. Bending Mechanism Bottom Plate, Part No. PBD-001-001 .................
197
Fig. C.4. Bending Mechanism Top Plate, Part No. PBD-001-002 ...................
198
Fig. C.5. Torque Gear A, Part No. PBD-001-003 .....................................................
199
Fig. C.6. Torque Gear B, Part No. PBD-001-004 ..............................
200
Fig. C.7. Drive Shaft, Part No. PBD-001-005 .........................................................
201
Fig. C.8. Input Shaft, Part No. PBD-001 -006 .........................................................
202
Fig. C.9. Torque Arm 153, Part No. PBD-001-007 ...................................................
203
Fig. C.10. Torque Arm 157, Part No. PBD-001-008 .................................................
204
Fig. C. 11. Beam Clamp A, Part No. PBD-001-009 ...................................................
205
Fig. C.12. Beam Clamp B, Part No. PBD-001-010 .............................
206
Fig. C. 13. Beam Clamp C, Part No. PBD-001-01I ...................................................
207
Fig. C. 14. Beam Clamp D, Part No. PBD-001-012 ...................................................
208
Fig. C.15. Thrust Bearing, Part No. PBD-001-013 ..................................................
209
Fig. C .16. Plate Spacer, PBD -001-014 .................................................................
210
Fig. C.17. Shaft Coupler, Part No. PBD-001-015 ....................................................
211
Fig. C.18. Support Beam 153, Part No. PBD-001-016 ..............................................
212
Fig. C.19. Support Beam 157, Part No. PBD-001-017 ..............................................
213
Fig. C.20. Probe model ...............................................
214
F ig . C .2 1. Prob e p arts list ................................................................................
2 15
Fig. C.22. Flange Plate, Part No. PBD-002-001 .....................................................
216
Fig. C.23. Large Probe Plate, Part No. PBD-002-002 ................................................
217
Fig. C.24. Upper Small Probe Plate, PBD-002-003 ..................................................
218
15
Fig. C.25. Lower Small Probe Plate, Part No. PBD-002-004 ........................
219
Fig. D.1. Bending Mechanism ..............................................
221
Fig. D.2. Bending mechanism gear train ..............................................................
222
Fig. D.3. Bottom Plate, Part No. PBD-001-001 ......................................................
223
Fig. D.4. Top Plate, Part No. PBD-001-002 ...........................................................
224
Fig. D.5. Torque Gear A & B, Part No. PBD-001-003 & PBD-001-004 ..........................
225
Fig. D.6. Drive Shaft, Part No. PBD-001-005 .........................................................
226
Fig. D.7. Input Shaft, Part No. PBD-001 -006 .........................................................
226
Fig. D.8. Torque Arm 153, Part No. PBD-001-007 ....................................
227
Fig. D.9. Front View, Support Beam 157, Part No. PBD-001-017 ................................
227
Fig. D.10. Back View, Support Beam 157, Part No. PBD-001-017 ................................
228
Fig. D.11. Machining Support Beam 157 ......................................
228
Fig. D.12. Beam Clamp C, Part No. PBD-001-011 ...................................................
229
Fig. D.13. Beam Clamp D, Part No. PBD-001-012 ...................................................
229
Fig. D .14. Top portion of Probe .........................................................................
230
Fig. D .15. Probe prepared for testing ...................................................................
231
Fig. D.16. Flange Plate, Part No. PBD-002-001 ......................................................
232
Fig. D. 17. Flange Insulating Plate, Part No. PBD-002-005 ...................
.................... 232
Fig. D.18. Large Probe Plate, Part No. PBD-002-002 ................................................
233
Fig. D.19. Upper Small Probe Plate, Part No. PBD-002-003 .......................................
233
Fig. D.20. Lower Small Probe Plate, Part No. PBD-002-004 ..............
.................. 234
Fig. D.21. Bending Mechanism Insulating Plate, Part No. PBD-002-011 ........................ 234
Fig. E. 1. Furnace for heat treating IGC samples ......................................................
237
Fig. E.2. Furnace for heat treating OST samples ......................................................
237
Fig. E.3. Sample heat treatment fixture made from Ti6A14V .......................................
238
Fig. E.4. Heat treatment fixture and cap coated with Graphokote to prevent sintering .......... 238
Fig. E.5. Grooves machined in sample heat treatment fixture .......................................
238
Fig. E.6. Heat treatment fixture after removing from furnace .......................................
239
Fig. E.7. Sam ples after heat treatm ent ..................................................................
239
16
Fig. E.8. Samples are one continuous strand ..........................................................
240
Fig. E.9. Removing samples from fixture ..............................................................
240
List of Tables
Table 1.1 Timeline for Nb3Sn conductor development .............................................
31
Table 2.1 Summary of the example strand specifications .........................................
64
Table 3.1 Values for estimating Support Beam torque ...............................................
102
Table 4.1 Bending mechanism shaft rotation/strain state for [1.53 ...............................
132
Table 4.2 Bending mechanism shaft rotation/strain state forf-1 .57 ...............................
132
Table 4.3 Tensile strain in an offset strand with applied bending strain ........................... 172
Table 4.4 Bending strain in an offset strand ...........................................................
173
Table 4.5 Strain distribution in offset strand ...........................
............................
175
Table A. 1 Estimate of actual bending strain at center of beam .....................................
184
Table A.2 Derivative estimate of actual bending strain at center of beam ........................
185
Table B. 1 Gear parameters for bending mechanism wormgears and worms ..................... 191
Table B.2 Spline parameters for bending mechanism components .................................
193
Table F. 1 Test sample voltage tap separation distances (inches) ...................................
241
Table F.2 Test data for IGC 157, Sample #1 ..........................................................
242
Table F.3 Test data for IGC 157, Sample #2 ..........................................................
243
Table F.4 Test data for IGC 157, Sample #3 ..........................................................
243
Table F.5 Test data for EU 153, Sample #1 ............................................................
244
Table F.6 Test data for EU 153, Sample #2 ............................................................
245
Table F.7 Test data for EU 153, Sample #3 ............................................................
246
18
Glossary of Terms
a: minimum radius of superconductor filament
A: cross-sectional area
a: angle subtended by circular arc
b: beam thickness
B: magnetic field intensity
C1 : constant of integration
C2 : constant of integration
C3 : constant of integration
CICC: cable-in-conduit-conductor
C,: specific heat of superconductor
d: strand diameter
db: beam thickness
d,: strand diameter
de: differential elongation
dx: differential length
de: differential angle
5: offset of strand from beam neutral axis
E: elastic modulus
E: critical electric field level
c: bending strain
CB:
bending strain in strand when strand is offset from beam neutral axis
Ebeam:
8
strand:
bending strain in support beam
bending strain of strand
&t: strain in strand caused by thermal contraction
ET:
strain in strand caused by tensile load
f nondimensional ratio between L, and L,
F: force
20
G: shear modulus of elasticity
GF: strain gage Gage Factor
y,: mass density of superconductor
h: beam height
H,: critical magnetic field
Hy: applied magnetic field
HTS: high temperature superconductor
I: current
I: critical current
I: moment of inertia
ITER: International Thermonuclear Experimental Reactor
J,: critical current density
J0o: critical current density at operating magnetic field intensity
ic:
strain gage bridge constant
f: length
t : critical length twist pitch
t,: twist pitch
ld:
deformed length of line
L,: undeformed length of sample
Lstrand: length
of strand after deformation
L,: distance between rotation axes in bending mechanism
LTS: low temperature superconductor
M: moment
p,: magnetic permeability
n: total gear ratio of bending mechanism
N: normal internal force
w: rotation from undeformed
r: length of lever arm
p: radius of curvature
state
21
p,: electrical resistivity
Pstrand: radius of curvature of strand
T,: critical temperature
T0 : operating temperature
0: angle of rotation of bending mechanism lever arms
u: horizontal displacement
Uerror: error in the beam end displacement from ideal
Uideal:
ideal displacement of beam ends for pure bending
Umech: displacement of beam ends produced by bending mechanism
v: vertical displacement
V: internal shear
VE: strain gage bridge excitation voltage
bV: change in the strain gage measurement voltage
: local axial coordinate
y: distance from neutral axis
22
Chapter 1
Introduction
The superconducting compound niobium-tin (Nb3 Sn) is an important technological material for
building high field superconducting magnets. The superconductive state of Nb3Sn is sensitive to
the strain conditions of the material. A considerable amount of research has been invested in
trying to understand and predict this strain-dependent behavior so that more advanced magnet
designs may be realized.
This thesis describes the design and testing of a variable-strain bending mechanism which was
used to measure the bending strain dependent critical-current of two different internal-tin Nb3 Sn
strands, manufactured by Intermagnetics General Corporation (IGC) and Oxford Superconductor
Technologies (OST).
1.1 History
A material that is in a superconductive state has the two prominent characteristics of being able
to conduct electrical current without resistance and, more importantly, expelling magnetic field
from within the interior of the material. This second characteristic, known as the Meissner
24
effect, is the underlying means for conduction of electrical current without resistance in a
superconductor.
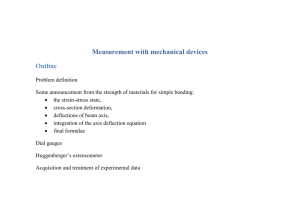
Superconductivity is a phenomenon that is common to many materials when placed under the
appropriate conditions. Each material has specific critical values of temperature, T,, magnetic
field, H,, and current density, J, which express the limits of the superconducting state. In
addition, some materials, such as Nb3Sn, have a superconductive state that is particularly
sensitive to the strain state, &.These values, representing the transition between the
superconductive and normal resistive states, are often referred to as critical values. Thus the
critical values establish a three-dimensional surface (or four-dimensional surface of properties if
sensitive to strain), such as that shown in figure 1.1 which the material must be held within to
remain superconducting.
J
Critical Surface
Fig. 1.1. Critical superconductive surface.
Kamerlingh Onnes discovered superconductivity in 1911 soon after he had successfully liquefied
Helium in 1908. His original discovery came as he was testing the resistance of mercury with
temperature. As he lowered the temperature below the 4.15 K critical temperature for mercury,
the resistance suddenly dropped to zero. Onnes soon found several other materials that exhibited
superconductivity at low temperatures, such as lead and indium.
25
After having established the critical temperatures for several materials, Onnes went on to find
that there was also a critical magnetic field and critical current density. Realizing the potential of
superconductivity, he built a solenoid magnet in 1913 using lead wire. This magnet could not
remain superconducting beyond its own self-generated magnetic field of 0.08 T, establishing that
there was both a critical magnetic field and critical current limit to the material.
The materials that Kamerlingh Onnes and his contemporaries studied had very low critical
values that appeared to diminish any potential of using them for large power applications. These
substances, now known as Type I superconductors, were not able to transport any appreciable
amount of electrical current in the presence of a low magnetic field. Type I materials only allow
magnetic flux penetration within a thin layer at the surface of the material, as described by the
London Theory which was introduced in 1935. It was the discovery of a lead-bismuth alloy
Type II superconductor by de Haas and Voogd in 1930 that initiated the advancement of high
power superconductor applications [1.1].
1.2 Type II Superconductors
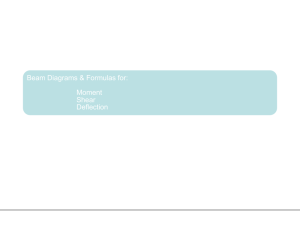
Type II superconductors are a mixture of Type I superconducting material with a distribution of
normal resistive regions. The local islands of resistive regions allow magnetic flux lines to
penetrate through the mixture without destroying the overall superconductive state. If a transport
current were applied to an ideal Type II superconductor in the presence of an external magnetic
field, the resulting Lorentz force would cause the magnetic flux lines to move and redistribute
across the material. This is illustrated by figure 1.2. The movement of the flux lines is
dissipative and requires a voltage to sustain the transport current in the conductor, thus
eliminating the superconductivity [1.2].
26
VOLTA GE
TRANSPORT
CURRENT, Jit
EXTERNAL FIELDHe
Fig. 1.2. Dissipative flux motion in a Type II superconductor [1.2].
The flux lines may be pinned in place and prevented from moving by the presence of defects in
the lattice structure of a non-ideal Type II superconductor. Vortices of magnetic flux penetrate
through the normal regions and are surrounded by shielding currents. This establishes a pinning
force that keeps the flux from moving and has the effect of raising the upper critical field level of
the material. Each vortex contains one flux quantum which are arranged in a triangular lattice
pattern throughout the material to minimize the energy state. This effect is illustrated in the
drawing in figure 1.3a [1.3] and by an actual picture of the flux lattice in figure 1.3b [1.4].
Depending on the size and type of pinning site, there may be more than one flux quantum
pinned.
27
Magnetic
Flux Lines
I
Grair
Bounda ries
--
Pinned
Vortex Current
T
-
Transport Current
(a)
(b)
Fig. 1.3. (a) Flux penetration in a Type II superconductor, and (b) picture of actual flux lattice
[1.3,1.4].
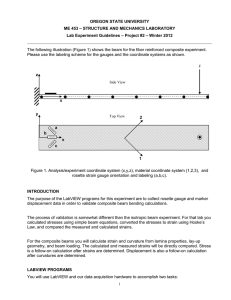
The pinning sites of a Type II superconductor may be made up from several different types of
imperfections in the bulk material including elemental inclusions, slip planes and other lattice
defects, grain boundaries, and even voids from cold-working the material. The magnitude of the
flux pinning force density depends on the type of pinning site and the superconducting material.
Due to their differing pinning sites some Type II materials have higher flux pinning force density
that others, as shown in figure 1.4 [1.5]. A higher flux pinning force density is desirable because
it results in a higher critical field level for the material.
28
Bulk Pinning Force Comparison
10UMr
T MC *mid t7u%Wr wih nd.% 'ipm ;2duwn
Iftn.m*Wa1 dimO -kamuw et it fIWASq
BEibbau..aliet ii. (UW-ASC)
Mmmnd ibomn.s
-lai:
T
---
NbSn
YBCO
-aW-U- b: Bat Heat Teated UW Manvflianmt. (Li and
LaubalmsMe. IT)
(2116)331 mno nedllsayer 15 45150 iNlcm.
lbT:l-llb
McCarmidp et t ie)
pad
Cu APC. MduW6WC. R. Zhou PWD
lsi:sn
--*+ Thesi ("n'"1
Sa Sn Pled CUAPC2OOru@630C. hou at aLfOST).
- U -
-e--
4-
'I
4-~
-a--
-
Ii.
BM2
4a
U
-
NbN!AfN
-
-flb
3
E: MlatbishTER
MW hiwnal Sn
lSa
SnWand: Wih J, ermi Sn MW(Pen et al
ASC~-M
tachi.1M4M.
Q4- l"/: Transfwnmd rod-40-be lb/i
lb Slammed. APL.vol. 71(1). pp-122-124). 1357
IMANMtRayr B.Gray at aL (AL)
I:N: 13nm-4M2nMi
-- ePhysic C. 132' =
mbrkd e.Ibab 73 K.Fokyn
- n thwik nkmab
-E-
IWZVsO:lWR.
Nb-Ti
191iamWttap* BNlip. bt
-+-
Hi2223: Roled 15 Fil Tpe(AwsC) B. UW6M
---
....
--
-Okada et al PUlachi
M
Mg,'.
-..--
y mn"
3. Eam et at(W)
-a--Lf,: 10%wt SiC daped(Dou
u e 2002
et al APL 2002.UW
MgB 2
0
5
10
15
20
25
Applied Field (T)
I *-fp.Mp.marLt
d
hkbVn! W MW-CMO byPibr
Fig. 1.4. Flux pinning force comparison [1.5].
The concentration of pinning sites is just as important as the flux pinning force density in setting
the critical field of a bulk Type II superconductor. Up to a point, increasing the number of flux
pinning sites will allow more magnetic flux lines to penetrate the material and increase the
critical field level. The magnetic field will penetrate through the normal regions until these sites
are all filled, at which point the flux must go through the superconductive regions. This quickly
causes a breakdown in the superconductive state and marks the critical field level. When more
normal pinning sites are available, a higher intensity magnetic field can be applied to the bulk
material before the flux lines must move to the superconducting region. However, as the amount
29
of resistive regions is increased it leave less available superconductive region for conduction of
the transport current, thus reducing the current capacity of the bulk material.
The concentration and type of pinning sites throughout the bulk superconductor are dictated by
the material constituents and fabrication processes. The combination of cold-work on the
material and special heat treatments can be used to control the quality and quantity of pinning
sites, thus improving the critical field and current density limits of the bulk superconductor.
Much research goes into developing these processes to create a conductor with the best possible
final properties for the given design.
1.2.1 Theories of Superconductivity
There are three significant theories of superconductivity that will be mentioned because of their
importance to the subject, but will not be discussed in detail. These include the London Theory,
the Bean and Anderson-Kim critical state models, and the BCS (Bardeen, Cooper, and
Schrieffer) Theory.
The London theory (1935) is a phenomenological theory that was a modification of Maxwell's
electromagnetic theory to describe the Meissner effect (discovered in 1934). This theory
establishes that the bulk superconductor is shielded from an external magnetic field by a
supercurrent that flows in a thin layer at the surface of the superconductor and has a thickness
equal to the London penetration depth, X.
The Bean model (1962) and Anderson-Kim critical state model (1963) establish the balance
between the flux pinning force and the Lorentz force. The Bean model assumes that the critical
current of the superconductor, J,, is a constant while Kim proposed that J, is proportional to the
inverse of the magnetic field intensity, 1/B. These theories provide ways to estimate the
magnetic field and current profiles within a superconductor and predict the magnetization curve
of the material.
30
The BCS theory (1957) is a quantum mechanical theory that successfully modeled Type I
superconductivity properties. It is based upon the concept that electrons close to the Fermi level
form into Cooper pairs caused by an attraction related to lattice vibrations at the appropriate
temperature and mediated by phonon interaction. The electron pairs are bosons that can behave
very different from single electrons that must obey the Pauli Exclusion Principle. These pairs
have a slightly lower energy level and leave an energy band of around 0.001 eV. This energy
gap allows the pairs to avoid the collision interactions that lead to resistivity.
1.3 Superconductor Development
Applications of superconductors range from devices that simply exploit their behavior such as
Josephson junctions to devices that place high demands on the superconductor, such as fusion
reactor magnets. Of the thousands of superconducting materials that have been discovered there
are only a few which are able to meet the demands of high field magnet applications. The
environments in such magnets place the extremes of high field, high strain, high current,
temperature instabilities, and sometimes radiation exposure on a superconductor.
At present, there are only three superconductors that have been used successfully in such
extreme applications and include the two Low Temperature Superconductors (LTS) Nb-Ti and
Nb3 Sn and one High Temperature Superconductor (HTS) BSCC02223. There are four others
that are under present development and which may be used in the future: Nb 3Al and MgB 2 as
LTS and BSCCO2212 and YBCO for HTS [1.6].
Generally, it takes many years from the discovery of a superconducting material to its final
development as a magnet-grade conductor. A timeline for Nb 3 Sn is given in table 1.1 and
reveals that there was almost 30 years from the discovery of the superconducting properties of
the material to the realization of a magnetic-grade conductor. Of, course as techniques become
refined and the various problems worked out, the development process can be much faster for
31
subsequent materials. The development time to a magnet-grade Nb 3 Sn conductor was
particularly long because of various problems related to stability and coupling losses which had
to be solved.
Table 1.1. Timeline for Nb 3Sn conductor development [1.7].
Event
Period
1
Discovery
Early 1950s
2
Improvement Jc
Early 1960s
3
Co-processing with matrix metal
Mid 1960s
4
Multifilament/twisting, Ic>100 A
Early 1970s
5
Long length, typically -1 km
Mid 1970s
6
Full specifications for magnets
Late 1970s
Stage
The two most important problems that impeded early conductor development progress were flux
jumping and coupling losses. The simple solutions turned out to be creating small multifilamentary strands with stability protection and twisting these filaments to minimize the area
available for self-induced current. But it was only after much effort that these solutions were
realized.
Flux jumping is an event when the magnetic flux within a superconductor is suddenly
rearranged. Under normal operating conditions the superconductor is in a stable state where the
Lorentz force on the magnetic flux is just balanced by the pinning force. If some disturbance
occurs to locally heat the superconductor then the critical current, J,, in that region will go down
with the increase in temperature and flux motion will occur. Flux motion is dissipative and
generates even more heat, which continues to locally raise the temperature. If the heating
instabilities are not mediated by some means of protection then the positive feedback process
32
could quickly cause the material to transition into a normal conductive state and the subsequent
Ohmic heating could permanently damage the conductor.
Most low temperature superconductors (LTS) have critical temperatures below 20K. Since the
specific heats of materials are very small at these temperatures, it only takes a minor disturbance
to raise the temperature of the material by several degrees. Disturbances that might cause a local
temperature rise include a mechanical motion that generates heat by friction or a transient
magnetic field that causes an increase in current.
Being faced with this stability problem, early conductor designs were unsuccessful because the
sources of the problem were not well understood. But over time adiabatic and dynamic
stabilization methods were developed which lead to practical conductors.
Adiabatic stability is achieved when the energy generated by Joule heating is balanced by the
heat capacity of the superconductor material. An analysis based on the Bean model, Faraday's
law, and the thermodynamic heat capacity of the material produces equation 1.1, which gives the
minimum radius of the superconductor, a, for adiabatic stability. This expression requires the
specific heat of the superconductor, Cs, the mass density, y, the magnetic permeability, p,,,, the
critical temperature, Tc, the critical current density, J,,, at the operating magnetic field level, and
the operating temperature, T0 [1.8].
Ta T 'I
p-j Jo
Using example values of
T, = 4.2K,
Y,= 6.2 x IO3 kg/m3 ,
B = 5T,
C, = 1J/kg-K,
J00= 3 x10 9A/m 2,
T= 7 K
(C.
33
the minimum superconductor radius for adiabatic stability is a 68pm, or a diameter of
d 140ptm. At low field levels J,, increases and J, is not a constant as assumed by the Bean
model, but is a function of B. So, a conservative estimate of the superconductor filament
diameter for complete adiabatic stability is d 70pm. Present designs of superconducting strands
have filament diameters as small as 3pm.
Dynamic stability is when the superconductive filaments are surrounded by a resistive material,
such as copper, that has good thermal and electrical conductivity. Good thermal properties allow
the heat generated in the superconductor to be quickly conducted away; good electrical
conductivity provides a pathway for the current to flow when the superconductor transitions into
its highly resistive normal state. This additional material stops the heating progression by
providing an alternate path for the current to flow and allowing the superconductor to cool back
to its operating state.
Problems can occur within superconducting magnets that require active protection beyond
stability methods. These problems include the breakdown of the insulation resulting in a short
circuit between windings or large mechanical motions. Voltage sensors are placed at various
points within the magnet to detect if a conductor begins to turn resistive, otherwise known as a
quench. When this occurs the energy in the magnet can be quickly reduced by connecting a
dump resistor across the magnet terminals or by switching on embedded heaters that heat the
entire magnet above T,.
The discussion on stability has shown that the superconductor should be formed into small
filaments and surrounded by a conductive metal matrix. Small filaments are limited by their
critical current density and are not capable of transporting any significant amount of current,
besides being difficult to handle. So in order to increase the current-carrying capacity and
practicality, modem designs combine many superconductive filaments within a copper matrix to
create what is known as a multifilamentary strand.
34
A strand is composed of many superconductive filaments electrically connected by copper or
some other resistive stabilizer. The electrical connections between the filaments provided by the
matrix allow the strand to experience coupling losses. A strand in the superconductive state has
a current and magnetic field distribution through its interior that can be described by the Bean
and Anderson-Kim critical state models. This distribution means that coupling occurs between
adjacent filaments when an external magnetic field is applied. Starting with a fully coupled
scenario, analysis can show that the amount of coupling can be reduced by twisting the
filaments. Introducing a twist in the strand shortens the distance between points where the
filaments cross, thus reducing the projected continuous area within the external field. For the
strand to not be fully coupled, it must have a twist pitch below a critical length, i C , that can be
calculated with equation 1.2. This equation uses the same definitions as in equation 1.1 with the
addition of p, for the electrical resistivity of the matrix material in the strand and, Hy, for the
applied magnetic field [1.9].
C =
16Jjap
(1.2)
For a strand composed of superconducting filaments with a radius of a = 50Rm, a critical current
density of J,=3x1O 9A/m 2, a copper resistivity of pc=3xO 10 9i-m, and p0 Hy = 0.01 T/s, the twist
pitch should be under t =27cm. For higher rates of expected field change, the critical twist
pitch should be correspondingly smaller. As a general rule the twist pitch, t ,, is usually
designed to be less than 10 to 15 times the strand diameter. So, for a 1mm diameter strand, the
twist pitch should be t P
10-15mm.
It is important to note that although twisting is effective in uniform fields, it is only partially
effective in non-uniform fields and completely ineffective with respect to self-fields. Self-field
is the result of the transport current in the filaments and the filaments remain parallel to each
35
other regardless of any twist in the strand. This means that a large area is available for induced
current to be generated by transients in the system.
1.4 Production of Nb 3 Sn Strand
The design and manufacture of magnet-grade conductors faces the practical problem of how to
produce many twisted small filaments distributed through a stabilizing matrix within a single
strand. This discussion will be limited to a few of the methods for producing Nb 3Sn-based
strand because they are the most relevant to this thesis.
The Nb 3Sn compound is a brittle material that cannot be drawn into lengths of strand using
standard wire forming techniques. Methods have been developed to manufacture Nb 3Sn strands
by first combining together the necessary raw materials in a billet form and then passing the
billet through a series of extrusion and annealing steps to achieve the desired strand diameter.
The final step in forming the superconductor is a heat treatment that causes the constituents in
the strand to react and form filaments of the Nb 3Sn superconducting compound. Handling of the
strand after the Nb 3Sn has been formed must be done with extreme care because the brittle
material can fracture easily.
The ingredients combined in the raw billets include niobium and tin for the superconductor,
copper for the matrix material, and a tantalum or niobium barrier to keep the tin from diffusing
into the copper and forming lower-conductivity bronze during the heat treatment. These
materials are combined using one of several different techniques and then drawn as a unit down
to the final strand size. Each of the components has different material properties that make it
difficult to extrude them together, so various annealing steps are often included to help the
process.
Copper is most often chosen as the matrix material because it is a highly ductile material that has
excellent conductivity and combines well with the other materials. The ratio of copper-to-
36
superconductor in the strand is typically in the range of 1:1 or 2:1. This relationship has been
shown to provide good stability while not occupying too much of the strand diameter available
for current transport in the final product. Of course, different applications may use a strand with
a slightly different amount of stabilizer.
There are six contemporary manufacturing methods for creating Nb 3Sn strand: Bronze, Internal
Tin, External Diffusion, Nb Tube and Sn Tube (Powder-in-Tube, PIT), Jelly Roll & Modified
Jelly Roll, and Cable-in-Tube (CIT). Only the first three methods will be covered because they
are the most relevant.
Bronze process starts with a bronze billet that is drilled with a pattern of holes which are filled
with niobium as shown in figure 1.5a. Several of these billets are extruded into hexagonal
shapes and then stacked into a copper can with an interior tantalum barrier. The can is sealed
and evacuated and then extruded followed by drawning into the final strand diameter as
illustrated by the process outline in figure 1.5b [1.10]. This extrusion process is similar for many
of the multifilament strand techniques.
Stack &
Extrude into
Hexagonal Shape
Cu-Sn
Nb
00
Extrude
FCold
[~Draw
Seal &
Evacuate
0
00
0
0
0
Fig. 1.5. (a) Bronze billet pattern, and (b) Multifilament drawing process [1.10].
Preheat &
Extrude
37
A picture of a Bronze process strand cross section is shown in figure 1.6. The view of the entire
cross-section reveals the light outer copper surface with the darker tantalum barrier surrounding
the filament pattern. The magnified view shows the individual filaments and the hexagonal
pattern.
Fig. 1.6. Picture of bronze process strand [1.11].
Internal Tin process begins with a pure copper billet that is drilled and filled with niobium and
tin in a pattern similar to figure 1.7a. These billets are combined and drawn together to form a
single strand. The extrusion and annealing steps are different than with the Bronze process
because the constituents have different material properties. The barrier is usually co-extruded
with the surrounding copper stabilizer. The Nb-Cu-Sn subelements are then restacked inside the
barrier tube and drawn to final wire size. The picture of the internal tin strand cross-section in
figure 1.7b shows that the tin core occupies a significant portion of the area. The tin must diffuse
through the copper surrounding the niobium filaments and combine to form the Nb3 Sn
compound during the heat treatment. This ends up creating a bronze matrix because tin has a
greater affinity for copper than niobium. The outer copper shell and the tantalum barrier that
keeps the tin from diffusing to the surface are clearly visible in the picture. The Internal Tin
design typically results in a higher J, than an equivalent Bronze process.
38
- Cu
-
Nb
PO
q~~Sn
(b)
(a)
Fig. 1.7. (a) Internal Tin billet, and (b) Picture of unreacted Internal Tin strand [1.12].
External Tin process is similar to Internal Tin in that it relies on the transport of tin through the
copper to react with the niobium during heat treatment. However, the tin is added to the surface
after the copper billet has been filled with niobium rods and extruded. The extrusion is plated
with tin and then combined with similar extrusions which are drawn together to form the strand.
Figure 1.8 shows the general layout of the external diffusion billet after it has been plated with
tin. This process is not often used because it either requires too fine subelements or results in too
small of a wire diameter.
Nb
Cu
A
Fig. 1.8. External tin billet arrangement [1.13].
I
S
39
Other strand processes are based upon the same concept of bringing the materials together and
forming a strand that is later heat treated to produce the Nb 3Sn compound. The primary
differences are in the configuration and steps used to create the strand. Some of the processes
result in a strand with a higher J,, while others produce an advantage with respect to AC losses.
The cold working and annealing steps are carefully adjusted for each process so that either the J,
is maximized or the AC losses are minimized after the final heat treatment.
During heat treatment, the niobium and tin can diffuse and create bridges connecting filaments
together. This is detrimental to the strand performance because the coalescence of the filaments
creates a much larger effective diameter which, as was shown earlier, increases the likelihood of
flux jumping as well as higher magnetization losses.
TvistAnneal
Spool
Fig. 1.9. Twisting of superconducting strand [1.14].
Test
Plating
(optional)
40
After the strand has been drawn to its final size it is twisted to a specified twist pitch in order to
reduce coupling losses. The general twisting steps are similar for the different strand designs and
are shown in figure 1.9. The strand may be plated with chrome to give it a protective surface
which eliminates strand-to-strand diffusion bonding during heat treatment. This is used when the
strands are cabled together to form a large conductor.
1.5 Cable-in-Conduit Conductor (CICC)
After the strand has been produced it is assembled into a conductor configuration for use in the
windings of the magnet. Different types of magnets use different conductors based on the design
requirements. Depending on the conductor design, the superconducting strand is maintained
below its critical temperature using either conduction or the flow of a cryogen fluid. The magnet
windings may be in a bath of cryogen as in MRI and NMR machines or have a cryogen flow
forced through the conductor as in fusion magnets and high-energy physics dipoles and
quadrupoles. Liquid-free conduction-cooled magnets are emerging in a wide variety of
applications mostly because of improvements to cryocooler performance.
Superconducting magnet conductors are generally composed of the superconductor, an
electrically conductive material for stability (Cu, Al, or Ag), the cooling system, and a highstrength metal for structural support [1. 15]. A magnet conductor design should be able to
transport the maximum current density while providing electrical insulation, cooling, stability,
and mechanical integrity all at the lowest possible cost.
The cable-in-conduit conductor (CICC) is composed of a cabled superconductor in a metal
conduit cooled by forced-flow supercritical helium. Its current carrying capacity combined with
its stability protection and inherent mechanical strength make it suitable for applications that use
high field, large volume magnets, such as in ITER (International Thermonuclear Experimental
41
Reactor) [1.16]. CICC was originally conceived circa 1975 and has subsequently received much
development attention. [1.17].
A picture of a disassembled length of CICC designed for use in the ITER CSMC (Central
Solenoid Model Coil) is shown in figure 1.10 [1.18]. This conductor is made up of a
combination of Nb 3 Sn internal tin superconducting strands and copper wires used for quench
protection which are twisted together in several stages to create the final cable. The twist pattern
for this cable can be seen in the figure and shows that groups of three strands are first twisted
together and then combined in subsequent twist stages to form the cable structure. Each stage
has a specified twist pitch and the overall pattem can be described by a series that represent the
number of groups twisted together at each stage; for this CICC it is 3-3-4-5-6 = 1080.
Fig. 1.10. ITER Central Solenoid Model Coil Conductor [1.18].
42
A cross-sectional view of a CICC in figure 1.11 shows some of the additional features of the
conductor [1.19]. The six final petals of the cabling are oriented around a stainless steel spring
that maintains a central cooling channel for the single phase supercritical helium flow. The
helium fills the void space and conducts away excess heat as it is forced through the magnet
windings. Long lengths of cable are inserted into welded extrusions of a nickel-steel superalloy
conduit of Incoloy Alloy 908 which is compacted around the cable to the final dimension.
Fig. 1.11. CICC cross-section view showing a series of internal magnification stages [1.19].
43
A series of magnifications of the conductor in figure 1.11 show the cross-section of a single
strand followed by a small group of the over 1100 filaments in the internal tin configuration and
concludes with a micrograph of one of the 3pm diameter Nb 3Sn filaments. After assembling the
CICC it must be heat treated to form the Nb3Sn superconducting compound. The reaction may
occur either before or after the conductor assembly has been formed into the magnet windings,
depending on the design procedure. In the case of ITER, the conductors are formed into the
magnet windings before the reaction heat treatment to form the Nb 3 Sn phase.
One of the primary applications for the cable-in-conduit conductor is in large fusion reactor
magnets such as those intended for ITER. Figure 1.12 is a picture of a computer model of the
ITER design showing the relative scale along with the various magnets and systems [1.20]. The
six central solenoids that are used to heat the plasma are at the core of the reactor and the toroidal
field coils used to contain the plasma can be identified by their characteristic D-shape. Poloidal
field coils surrounding the containment chamber at different elevations are used to shape the
plasma.
44
[1.20].
Fig. 1.12. Computer model of ITER (International Thermonuclear Experimental Reactor)
ITER is an experimental reactor that is a step between contemporary fusion reactors used to
study plasma and future reactors that will be capable of generating electricity. It is an
international project involving The People's Republic of China, the European Union and
and
Switzerland (represented by Euratom), Japan, the Republic of Korea, the Russian Federation,
45
the United States of Amenica. It is planned to be built in Cadarache, near Aix-en-Provence,
France and is technically ready for construction to begin. The first plasma operation is expected
to take place in 2016 [1.20].
Within fusion magnets, such as those found in ITER, large electromagnetic Lorentz forces are
generated which place tremendous loads on the components. In particular, the brittle Nb3Sn
strands which make up the conductor experience a complicated combination of mechanical
stresses. It is important to understand the effect of these loads on the strain-sensitive strand in
order to design reliable magnets that will operate at their expected levels.
As described before, the strands are twisted in several stages into cables and then compressed
into the structural jacket. This combination of cabling and compression means that the pathway
of a single strand through the conductor is complicated and irregular. The strand may be
positioned next to the jacket wall at one point and then migrate to the inner channel at a different
axial distance along the conductor; it can run parallel to neighboring strands or cross over them
causing a potential pinch point.
When the conductor is carrying current in a large magnetic field the pathway followed by the
strands leads to a complicated evolution of tension, compression, bending, and pinching strains
as the Lorentz forces are applied. The effect of the Lorentz force accumulates within the
conductor because, in addition to having their own electromagnetic forces, the strands closer to
the magnet axis push against those strands further from the axis. These resulting strains can
significantly degrade the ability of the Nb 3Sn superconductor to transport current. Much work
has gone into trying to understand the strain-related behavior of Nb 3Sn not just for fusion
magnets but for any application that places a strain-sensitive superconductor under a load.
46
1.6 Strain Behavior of Nb 3 Sn
The strain-related behavior of Nb 3 Sn was studied by Buehler and Levinstein approximately a
decade after its identification as a superconductor [1.21] and it was almost 20 years later that
Ekin presented a strain scaling law that could be used for the design of practical superconductors
[1.22]. This early work was primarily concerned with the uniaxial tensile and compressive
effects on the current capacity of Nb 3Sn with some thought given to bending strain effects [1.23].
The research showed that the application of tensile strain first increased the critical current
capacity of Nb 3Sn strand up to point before it began to decrease. This was explained by a precompression on the Nb 3 Sn that was applied by the surrounding matrix materials due to the
different coefficients of thermal expansion as the strand was cooled from the reaction
temperature to the operating temperature.
Since those pioneering studies, substantial work has gone into better understanding the strain
behavior of Nb 3Sn strand and developing improved strain scaling laws that are used for magnet
design. A general overview will be given of the various efforts that have been undertaken to
understand the strain behavior of Nb 3Sn. Rather than focusing on a single type of strain
research, this overview will present a variety of studies that will serve to illustrate the numerous
issues that surround the problem. The amount of effort that has gone into understanding the
strain behavior of Nb 3Sn and other superconducting materials is an indication of the importance
of this problem to superconductor applications. This effort has been driven by the need for better
design tools as the boundaries of experience are pushed by new and more demanding magnet
requirements.
47
1.6.1 Uniaxial Strain
The material surrounding the Nb 3Sn filaments in a strand places an intrinsic compressive strain
on the superconductor upon cool-down. The exact value of this compressive strain depends on
the particular arrangement and quantities of the several materials in a given strand design, but
typically is around -0.3% strain. Application of an external tensile axial strain to a strand
relieves this compression and increases the critical current. If the applied strain goes beyond this
amount, then the critical current begins to degrade. Appling a compressive strain on a Nb 3Sn
sample will just serve to degrade the critical current level from the intrinsic cool-down state.
Figure 1.13 shows a plot of the critical current in a Nb 3 Sn strand as a function of an applied
tensile strain. The strand characterized in the plot was produced by Teledyne (TWC) and used in
the 45T Hybrid magnet at the National High Magnetic Field Laboratory (NHMFL) [1.24]. The
figure reveals the increase and subsequent degradation in the critical current of the strand as the
applied strain goes to +0.3% and beyond. The open points are I measurements during loading
and the closed points are measurements after unloading. The unloading began at the point
marked "A" and measurements were done at 4.2K in a background field of 12T perpendicular to
the sample.
0
40
S0-
o
0.2
0.4
0.6 0,8
1
1.2
1.4
Strain, %
Fig. 1.13. Strain dependent critical current in the 45T Hybrid magnet strand at 12T and 4.2K
[1.24].
48
A common practice when reporting strand strain behavior measurements is to move the data so
that it is in terms of the intrinsic strain on the filaments. This consists of normalizing the critical
current to the maximum value and shifting the data so that the new zero-strain point corresponds
to this peak current. Figure 1.14 shows such a plot for an internal tin 00.8mm Nb 3Sn strand
manufactured by Oxford Superconductor Technology (OST). An adjusted intrinsic strain of
0.0% results in the maximum measured current for the sample at external field levels of 17T,
19T, and 20T. The critical current value was defined for an electric field of 0.1 pV/cm, which
will be explained in detail in chapter 4. The dashed lines represent fitting of the data to the strain
scaling model developed by Ekin for predicting strain dependent behavior. Strain was applied to
the sample using a popular device known as a Walters Spring (WASP) [1.25].
1. 00
0. 9.
0.
0.
o
0.
0.
WI
63
-_20
_
_
0.
0. 321T
0.2
0.
-0.4
Nb
n -I
rnal In
-
- ......1 . . . . ...-.. .
0.0
-0.1
-0.2
-0.3
-. -
0.1
-
0.2
0.3
intr. strain (%)
Fig. 1.14. Reduced critical current vs. intrinsic strain for OST internal tin wire [1.25].
49
Uniaxial strain tests of Nb 3Sn are often performed with mechanisms that are capable of loading
the sample through a large range of tension and compression in order to get a more complete
understanding of the strand behavior. The mechanisms are designed to be used in the bore of a
magnet that can produce a field intense enough to measure the critical current of the sample over
a useful range. Requiring the test to take place in a magnet bore severely limits the length of the
sample, which is unfortunate because longer samples give more sensitive measurement results.
There are three devices that are prominent in studying the strain-behavior of technological
superconductors: a U-spring holder, a device known as "Pacman", and the Walters Spring.
The U-spring device has been used in various forms over the years to apply strain to
superconducting samples. An example of one used at the University of Twente is shown in
figure 1.15 [1.26]. The sample is mounted across a bridge that is either stretched or compressed
by movement of the device's legs. It is a versatile and reliable system for characterizing the
strain behavior of technical superconductors, but it has limitations with respect to the length of
the sample that can be measured. Consequently, other devices intended to lengthen the sample
have been developed.
Strain dpsk
--
-
- - - --
45n
Tbermoseter
---
_
S a p lh
eo l e r
.---smupe-----
-Tape
-
5 nun
Tape
--
0
Strain p.p
e-----
0
Struin pop
L
<
Strain adjustmunI
-
HM---
Cnue%-uetloon (top)
Fig. 1.15. U-spring strain device used at the University of Twente [1.26].
50
The Pacman device shown in figure 1.16 was developed at the University of Twente. This
mechanism lengthens the sample from the -45mm of the U-spring to -104mm. Of course, the
effective test measurement distance is shorter than this, but it has resulted in a factor of 10
increase in length. The sample is affixed to the outside diameter of the holder and when a pure
torque is applied to the ends of the circular beam section the beam diameter changes. This
results in either a tension or compression in the test sample. Aside from the end effects, analysis
shows that the strain in the test section is fairly uniform and introduces little bending [1.26,1.27].
I
2
3
e36
-7
3
2.53
000
3.7
5
Fig. 1.16. Pacman strain device used at the University of Twente [1.26,1.27].
The Walters Spring (WASP) is an ingenious mechanism presented in 1986 that significantly
increases the sample length for strain measurements [1.28]. The Walters Spring has been
adopted and modified for use by several researchers to study the strain behavior of both Low
Temperature (LTS) and High Temperature Superconductors (HTS) [1.29,1.30]. Figure 1.17
shows the device used by Institute of Applied Physics at the University of Geneve, Switzerland
[1.25,1.31,1.32].
51
This WASP device can hold a sample length of 80cm and the Ti6Al4V spring alloy allows linear
and reversible strains up to 1.4% to be applied at 4.2K. The sample is wrapped around the outer
surface of the spring and either lies in a groove or is fixed by soldering. The mechanism
operates by applying opposing torques at each end of the spring. It has benefited from many
years of refinement and is one of the more common devices used for characterizing the strainbehavior of Nb 3Sn strand.
mnt contaot
stram gauge
Ti alloy spring
Nb 3Sn wire
Fig. 1.17. The Walters Spring (WASP) device for measuring critical current as a function of
strain [1.31].
The critical current information collected from the various strain methods is intended to improve
understanding of the behavior of strain-sensitive superconductors. This data is then used to
develop and improve universal strain scaling laws for use in magnet design. Being able to
accurately predict the performance of the superconductor within a magnet allows designs to be
created that optimize the use of the expensive superconducting materials.
52
1.6.2 Strain Scaling Laws
Scaling laws have been developed to predict the behavior of technological superconductors in a
practical design. Those superconductors with little or no strain sensitivity have relationships that
express the behavior of the material in the three-dimensional space of current density,
temperature, and magnetic field. But those superconductors with strain-sensitivity, such as
Nb 3Sn, have a slightly more complicated description that includes additional parameters to
account for the strain effects.
Superconducting magnet designs have often avoided the added cost and uncertainty associated
with using a strain-sensitive superconductor by using less strain dependent materials, such as
NbTi. This limited the potential capability of those magnets because the strain-sensitive
superconductors, such as Nb 3Sn, have inherent critical properties that allow them to produce
higher magnetic field levels. The maturation of strain scaling laws provided a means for more
accurate designs to be created using these materials as the need for magnet performance
intensified.
In 1980, Ekin presented a universal strain scaling law for practical superconductors [1.22]. This
law and its refinements have been particularly successful for Nb 3Sn conductors and has allowed
many magnets to achieve their design parameters. The Ekin scaling law was expanded to
include temperature dependence and the effects of nuclear radiation by Summers in 1991 [1.33].
Work on the development and refinement of universal scaling laws continues to be done in an
effort to extend the range and accuracy of these predictive tools [1.34,1.35,1.36].
The Summers-Ekin scaling law for Nb 3Sn is presently the most common method for designing
magnets. Expressions for this scaling are given by equations 1.3 to 1.11. This scaling law
consists of a few simple expressions for the critical current density, J", and the critical
temperature, T,, which are modified by additional expressions that compensate for the strain
53
state and magnetic field conditions. Constant parameters are selected from a table of values
depending on the strand configuration and its use [1.37].
J (Bmax,op, tot)
Bmax' op' tot
1+
JO(Top
Jc(BmaxTop,tot
T
(Bma,,x
76=o
C
TCO 6toJ- I-r
(1.3)
(1.4)
BCM
c2,
M
where
Jci (Bmx , To,,I-o ) =
Bc2 (T,
,., )=
b=
BO(
Bmax
""
BcTcoetot
(Bc2 (Top
Bc20 (v,,, XI_-t2
Jc (Top,)= J
b=
CO
-
6
1_ -
(t22
)112
)
(1 -
2 ) 2 b-1 /2(1
-b)
2
(1.5)
(1.6)
(1.7)
(1.8)
)
(1.9)
TCO (6=To
-e
(1.10)
54
Bc2 (,t
) = B20M
-
a-tot
(1.11)
1.7)
For binary Nb 3Sn, oa=900 for s&0 t<O and u=1250 for stot>O; with ternary Nb 3Sn, c=1400 for stot<O
and a=1800 for &tot>O.
Some example material constant values are given below:
For binary Nb 3Sn:
Bc2 M
=24T, Tom =16K, and Co=2.22x10 0 AT 2m2
For high performance ternary Nb 3Sn: B.2 , =2 8 T, Tom=18 K, C0 =1.16x10'0AT1 2m2, and
J0 =3.3554x1O 10 A/m 2
For low performance ternary Nb 3Sn: Bc2.M=28T, Tcom=18K, C0 =0.9064x10 AT
2m2 ,
and
J0 =3.3554x10 10A/m 2
1.6.3 Compound Strain
Much of the research focus for improving the strain scaling laws has been in the areas of tension
and compression. But, as was stated earlier, the true strain state of the strands within a magnet
conductor, such as a CICC, is very complicated and not clearly understood. In addition to
uniaxial tension and compression, a technical strand in a magnet conductor may also have a
combination of transverse compression (pinching), bending, and possible twisting loads. These
loads occur in different combinations along the same strand as it passes along its path through
the windings.
Other experiments have been designed and performed in an effort to capture some of the more
complicated loading conditions that the strand may experience. These have been done both to
test the application of the scaling laws in more complicated strain conditions and to gather
empirical data that compensates for the knowledge gap between the predicted performance of a
strand and its actual performance within a magnet conductor.
55
An early test for the transverse strain behavior of a superconductor was done by Ekin [1.38].
This device used two anvil heads to compress a sample placed between them in a background
magnetic field, as shown in figure 1.18. The sample was heat treated, or reacted, in a U-shape to
create legs for the current contacts. Measurements showed that the degradation in the strand
with transverse strain was more severe than for a condition of uniaxial strain.
F
Rounded Edges
Voltage Taps
B
B
Sample Reacted
to Shape
Solder
Copper Current
Contact
Pivoting Anvil Head
F
Fixed Anvil Head
Fig. 1.18. Ekin transverse strain mechanism [1.38].
A novel strain device was created after analysis of the ITER Central Solenoid Model Coil
(CSMC) and Insert coils revealed that the performance of the cables was below the prediction
based on single strand characteristics. The device, known as the "Test Arrangement for Strain
Influence on Strands" (TARSIS), was intended to load a single strand in a state that was similar
to the conditions in the magnet cable-in-conduit conductor [1.39].
The mechanism is shown in figure 1.19. It consists of a lower drum and an upper cap with a
periodic circular arrangement of fingers and pins, respectively. The sample is placed between
these fingers and pins on the circumference of the drum. It is constructed from Ti6Al4V alloy so
56
that the sample can be heat treated directly on the device to avoid handling issues and have a low
thermal induced strain on cool-down since the titanium alloy has a thermal coefficient of
expansion near than of Nb3 Sn strand. Operation consists of closing the cap on the drum so that
the fingers interlace with the pins, thus placing the strand in a periodic bending-tension-shearingpinching state. The alignment and movement is carefully controlled and measured by an
extensometer and load cell.
Fig. 1.19. TARSIS periodical bending device [1.39].
Tests with TARSIS were done cyclically to observe the degradation with repeated load
application, as occurs in a magnet that is turned on and off. Results showed a reduction in strand
performance that was a combination of permanent degradation from plastic deformation and
reversible degradation with loading. TARSIS was a new step in strand testing, but at this point it
has been determined to be more of a quantitative device rather than qualitative.
Other tests have been performed that attempt to isolate the bending strain behavior of Nb 3 Sn
strand. Senkowicz, Takayasu, and Lee have been involved in a series of static bend tests where
57
the sample is clamped in a fixture with a constant radius of curvature [1.40]. The Nb3Sn strand
is heat treated in a straight configuration and then mounted in a groove between two curved
Ti6Al4V clamps at room temperature. The device is then placed in a background magnetic field
and the critical current is measured. A series of clamps are used that incrementally proceed from
a baseline of 0.0% strain to 1.4% strain. A picture of the strand mounted between two clamps
with a given radius of curvature is shown in figure 1.20.
Fig. 1.20. Fixed bending strain behavior strand configuration [1.41].
Results showed that the critical current first increased up to a bending state near 0.4% and then
degraded, much like tension tests. After a lowering of the critical current, there was a curious
increase around 0.6% that quickly went down with additional bending strain.
Because of the nature of the device, an individual strand can only be tested at its fixed bending
strain state. It does not provide a way for the same strand to be loaded at multiple strain states.
Therefore, it is not clear if the increase or degradation in critical current is solely from bending
strain or a combination of bending strain and handling damage.
58
1.7 Thesis Objective
Many tests have shown that there is a continued need for additional information about the strain
behavior of Nb 3 Sn strand. Gathering this information leads to improvements in strain scaling
laws and the ability to design more capable and optimized superconducting magnets.
The objective of this thesis is to design, construct, and test a mechanism for characterizing the
variable-strain bending behavior of technological Nb 3Sn superconducting strand. The strand will
be placed on a support beam that will be bent through an evolution of pure bending states. This
will allow a single strand to be characterized over a large range of bending strains which is
similar to previous work done with high temperature superconductors [1.42]. Any degradation
in the critical current of the strand during testing should be solely a result of the loading state. It
is intended that such a device will take the next logical step beyond uniaxial strain to extend the
understanding of strain behavior in a technological superconducting strand.
The pure bending device will be designed for characterizing the strand in a 4.2K liquid helium
bath with a background magnetic field. The magnet chosen for the design is the 190mm bore
20T resistive Bitter magnet at the National High Magnetic Field Laboratory in Tallahassee,
Florida [1.43]. This magnet was selected because it has a large bore which allows a longer test
sample length at relatively high magnetic field.
This thesis discussion will proceed in Chapter 2 with an analytical development of the equations
necessary for designing a pure bending device. Chapter 3 will continue with the important
design requirements and complications that had to be satisfied by the design. And the conceptual
design will be described along with the solutions to the problems. Chapter 4 will present the
testing that was performed and conclude with a discussion of the results and recommendations
for future work.
Chapter 2
Analytical Development
The previous chapter discussed the motivation for performing a pure bending experiment on
Nb3Sn superconducting strand that experiences strain degradation. This chapter will develop the
analytical equations for designing a large-displacement pure bending experiment.
2.1 Mechanics of Materials
Bending refers to the flexure of a beam into some curvature. Pure bending occurs when the
beam has a constant curvature along its length, as if it were bent into an arc of a circle. The
beam has a constant bending moment throughout and there are no shear forces. In contrast, a
beam experiencing nonuniform bending has internal shear forces and the curvature changes
along its length.
As shown in figure 2.1, a beam in a state of pure bending has compressive stresses on the inner
face and tensile stresses on the outer face. Somewhere between these two surfaces is the neutral
axis defined as the location where the stresses are zero. For a linearly elastic homogeneous
beam, the neutral axis lies at the centroid of the cross-sectional area when there is no axial force
60
acting on the cross-section. The radius of curvature defines the amount of flexure in the beam
and can be used to determine the bending state.
A beam can be loaded in pure bending by applying two moment couples having the same
magnitude but acting in opposite directions. Similarly, a beam can be bent around an object with
a constant curvature, such as a cylinder, to create a pure bending state. In both cases the forces
must be applied so that shear stresses are not generated. The motion required to create pure
bending consists of moving two points of the beam closer together as they are rotated in opposite
directions relative to one another. This movement preserves the original length of the beam and
assists the natural tendency to curve into an arc. The relationship between the displacement and
rotation motion is critical for achieving pure bending and is the ultimate focus of this chapter.
Radius of
Curvature, P
Inside Face
(compression)
M
M
Neutral
Axis
Outside Face
(tension)
Fig. 2.1. Beam in pure bending.
A brief development of the relevant mechanics equations will now be presented. This will make
the assumptions and consequent limitations of these equations more clear. Further treatment of
linear elastic mechanics may be found in a textbook on the subject [2.1].
61
Figure 2.2a shows a length of a homogeneous beam prior to being deformed. The dashed line
represents the neutral axis of the beam. Lengths along the neutral axis are assumed not to change
when the beam is placed in pure bending. The line dx lies on the neutral axis while the line cd is
a distance y above the neutral axis. Examining the normal strains in these locations when a
positive moment couple is applied to the beam provides the means for deriving the pure bending
relationships.
a
b
,d
c
----------------------------- -------- - ----
M
dx
e
M
f
(a)
dd
bM
a
M
dx
e
f
(b)
Fig. 2.2. Deformation of a beam in pure bending: (a) side view of beam, (b) deformed beam.
62
The lines ae and bf represent initially parallel cross-sections of the beam that have been rotated
in the deformed beam of figure 2.2b. The resulting angle between these lines is dO and, if
extended, they would intersect at a distance p from the neutral axis. The initial distance between
the two lines at the neutral axis, dx, remains unchanged after the beam is deformed and can be
expressed in equation 2.1 using the radius of curvature, p, and differential angle, do.
dx = pod
(2.1)
All of the other lines connecting lines ae and bf either lengthen or shorten depending on their
location relative to the neutral axis, thus creating normal strains, F. To evaluate these normal
strains, the deformation of line cd will be considered. This line remains the same distance y
from the neutral axis when the beam is deflected, but changes in length. The deformed length of
line cd can be found from the geometry. Realizing that the radius of curvature for this line is
p-y, the deformed length is lcd.
lcd =(p -
yWJ9
(2.2)
Equations 2.1 and 2.2 can be combined to eliminate dO, yielding equation 2.3.
lcd
= dx -dxj)
(2.3)
Originally the two lines ae and bf were parallel and separated by a distance dx. It then follows
that the elongation of line cd due to bending, dl, is given by equation 2.4.
dl = lcd -dx = -dx
(2.4)
63
Strain is defined as the amount of elongation divided by the original length, which can be
expressed by rearranging equation 2.4:
C
dl
dx
y
p
(2.5)
Equation 2.5 verifies that there is negative strain, or compression, above the neutral axis and
positive strain, or tension, below the neutral axis when the beam is in a state of pure bending.
The magnitude of the strain within the beam depends on the location relative to the neutral axis
and is directly proportional to the y distance. The strain is at maximum compression on the inner
surface of the beam (positive y) and varies linearly to a maximum tensile strain at the outer
surface (negative y).
A useful expression that relates the applied moment, M, to the radius of curvature of a beam in a
state of pure bending is presented without proof in equation 2.6. The elastic modulus, E, and
moment of inertia, I, are material and geometric properties of the beam, respectively.
M = EI
(2.6)
p
Equations 2.5 and 2.6 are the basis for determining the forces and rotations that result when a
beam is placed in a specified pure bending strain state. Although it was not explicitly given for
equation 2.6, both equations were derived using two basic assumptions. First, there exists a
neutral axis within the beam that does not change length when the beam is bent. Second, a more
subtle assumption is that cross-sections that are plane before bending remain plane after bending.
Both of these assumptions are related to the requirement that the material which makes up the
beam is homogeneous and linearly elastic. If a beam is distorted beyond its elastic limit and
begins to plastically deform, then these assumptions diverge from reality and the accuracy of
equations 2.5 and 2.6 are increasingly reduced. It is important to remember these restrictions
64
when applying them to the pure bending of Nb 3 Sn superconducting strand; the beam must
remain within its elastic limit in order for a pure bending state to exist.
2.2 Example Nb 3Sn Strand Bending
Now that the mechanics equations have been presented, an estimate can be made for the amount
of rotation that is required to bend an example Nb 3Sn superconducting strand. Testing of the
strand will take place in the 195mm bore 20T magnet at the National High Magnetic Field
Laboratory. A reasonable assumption for the bendable test length, L,, is 4.5 inches (114mm),
based on previous strand experiments in this same facility. The ITER spec strand has a circular
cross-section with a diameter, d, of 0.81mm (0.0319 inches).
Critical current tensile tests show that the Nb 3Sn strand current carrying capacity begins to
degrade at axial strains of 0.3%. This happens when the strand as a whole is under the same
uniform strain. But in pure bending, part of the strand is in compression while the rest is in
tension. So to capture the transition point, it is probably necessary to go to a higher bending
strain at the strand surface such as 0.7%. A bending strain of 0.7% means that there would be a
compressive strain of 0.7% on one surface of the strand that would vary linearly to a 0.7% tensile
strain at the opposite surface. Table 2.1 summarizes all the specifications for the example strand.
Table 2.1. Summary of the example strand specifications.
Ls
d
4.5 inch
(114 mm)
0.0319 inch (0.81 mm)
Cma
0.007
(0.7 %)
65
The design range of the bending mechanism is determined by the total angle that the strand must
be rotated through. Equation 2.7 is the standard geometric relationship used previously to relate
the arc length to the radius of curvature, but in this case the arc length is the original test length
of the strand and the variable a is the angle subtended by the arc.
L, = pc
(2.7)
Combining equations 2.5 and 2.7 allows the radius of curvature to be eliminated and the angle to
be expressed in terms of the defined parameters in equation 2.8. Recall that y in equation 2.5 is
the distance from the neutral axis to the position in the beam of interest. In symmetric beams,
such as the circular cross-section of the strand, the neutral axis is located at the center of the
beam. The maximum strain has been defined for the outer surface of the strand as a whole, so
that y is equal to half of the diameter.
a= L
(2.8)
d
21
Substituting the example values outlined above reveals that the strand must be bent into an arc
that spans 1.975 radians (113.2 deg) to achieve the maximum strain state. To provide some
sense of the geometry, figure 2.3 shows a scaled drawing of a 4.5 inch (114mm) strand bent into
an arc of 113 deg. Even though these results are based on an estimate of the strand test length,
the actual strand length will not be significantly different.
66
L, = 4.5 inch
smx=0.007
p =2.278 inch
1130
Fig. 2.3. Scaled drawing of example strand at maximum strain state.
It is evident from the large rotation of the example strand that it must be bent using a largedisplacement test method. If the strand length were shorter, then only small rotations would be
required in order to achieve the maximum strain state. A simple method, such as the standard
four-point bend test, could then be used to characterize the superconductor. However, for
reasons that are discussed in section 3.1, the strand should be as long as possible in order to
achieve an accurate measurement of the critical current of the sample. Therefore, an apparatus
capable of large-displacement pure bending motion must be designed.
Inspiration for a large-displacement bending apparatus can be found in the field of composite
materials research. Bend tests are commonly used to determine the strength of composite
materials because tensile tests can damage the sample in the region were it is held. This is
particularly important for brittle samples such as ceramics or materials that lack sufficient
internal cohesion like asphalt. Most often the four-point bend test is the preferred method, but in
cases where the rotations are significant a large-displacement method must be used. Such a
large-displacement technique has been developed and was validated with glass-epoxy samples
[2.2]. Using an apparatus with a similar layout would not be practical for testing the Nb3 Sn
67
samples because of the space limitations imposed by the magnet bore. Consequently, an
alternative device must be created that uses the available space more effectively.
2.3 Differential Equation Approach to Large-Displacement Bending
The design and optimization of a large-displacement bending mechanism depends on the
relationship between the translations and rotations required to produce a pure bending strain state
in the beam. In this section, the governing relationship between translation and rotation will be
derived.
Conceptually, the pure bending of a beam is an evolution through a series of intermediate
circular arcs. At each state the beam must have a constant radius of curvature, which means that
it truly forms a portion of a circle. This transformation process is illustrated in figure 2.4a where
an initially straight beam is bent through a series of pure bending states. It is apparent from the
figure that the ends of the beam must move closer together as they are rotated [2.3]. But figure
2.4b reveals that pure bending has no dependency on the vertical motion of the ends so long as
all movement is symmetric about the beam's centerline.
68
I
/
I
I
N
1~
/
011
(a)
(b)
Fig. 2.4. (a) Evolution of a beam through pure bending states, and (b) Pure bending is
independent of symmetric vertical motion.
The coupling between the rotation of the ends of the beam and the horizontal movement can be
found by solving a set of generalized constitutive beam equations originally presented by Simo
69
[2.2]. These governing expressions, given by equations 2.9-2.11, relate the displacement of a
beam to the internal normal force, N, the shear, V, and the moment distribution, M, while
allowing for large transformations. The limiting assumptions for these equations require that the
beam be homogeneous and that planes remain plane throughout deformation. As a reminder,
these same assumptions were used in deriving equations 2.5 and 2.6, which assures that the
expressions used to design the pure-bending device remain consistent.
N
(EA 1+ d
jfd\
V =(GA
cos+-v sin V d
dv cos / dg
M = (EI)dl /
+-
d)
1
sin V/]
j
(Normal force)
(2.9)
(Shearing force)
(2.10)
(Moment Distribution)
(2.11)
d
In these equations, E is the modulus of elasticity, G is the shear modulus of elasticity, I is the
moment of inertia about the bending plane, and A is the cross-sectional area of the beam. The
terms (EA) and (GA) represent the tensile and shearing stiffness while (EI) is the bending
stiffness of the cross-section. The equations are essentially one-dimensional because they are
given only in terms of the LOCAL axial coordinate of the beam, . The variables u, v, and M'
respectively give the horizontal displacement, vertical displacement, and rotation of a local
section of the beam relative to its original undeformed position.
Pure bending requires that the normal and shearing forces of the beam are zero and that the
internal moment is constant. Applying these requirements to equations 2.9-211 results in the
following modifications:
70
LC
du
dv.
1+
dv
cos
/+--sin/-1
(
du
cos V -
=0
(2.12)
1
sin l=0
(2.13)
M = (EI)d/
dg
(2.14)
Only three boundary conditions are required to find the relationship between the horizontal
translation and rotation at the ends of the beam. In figure 2.5a an initially straight beam of length
L, is shown with rigid clamps attached to the ends. The clamps are not allowed to deform when
they are used to apply a moment couple, M, to the beam. As the beam clamps are rotated an
angle 0 from their original orientation, the length of the beam, L., remains constant as shown in
figure 2.5b. Due to the beam's bending stiffness, the applied moment must be increased as the
clamp rotation angle increases. It is important to realize that the applied moment is only a
function of the beam clamp rotation as emphasized by the term M(6) in the figure.
Because the beam clamps are rigid, the rotation of the beam at the local coordinate of
=
0 in
figure 2.5c is equal to 0. This is given by the first boundary condition in equation 2.15.
V/( = 0)= 0
(2.15)
The second and third boundary conditions come from the symmetry of the beam. Both the
horizontal translation and rotation of the beam at the symmetry line must be zero for a pure
bending state.
U
=L' =0
2)
(2.16)
71
(2.17)
U0
Rigid
LS
L
PLXC
lamp
III
(a)
Ls
M(O)
M6
(b)
Ls/2
+
-~
-V
X
+N
--
M(O)
Symmetry
Line
(c)
Fig. 2.5. (a) Initially straight beam with rigid clamps, (b) Deformed beam, and (c) Half beam
with symmetry.
72
Finding the desired solution from the generalized constitutive equations begins by solving
equation 2.12 for dv/d , yielding equation 2.18. Substituting this expression into equation 2.13,
then simplifying and solving for du/d produces equation 2.19.
dv
d
=
1 {~
I
1sin V/ I
du
= cos
d
1du
1+ d Cos/
d
y/
1
(2.18)
-1
(2.19)
From the definition of pure bending, the internal moment distribution along the length of the
beam is constant and does not depend on the location, . Rather, the internal moment is only a
function of 0 as described previously. Equation 2.14 can be restated as equation 2.20, which
highlights that the right-hand side consists of only constant terms as far as the variable
is
concerned.
dy _M(O)
d
EI
(2.20)
Instead of solving for ' in the typical manner, a solution can be found that extracts out the
dependency on 0. Integrating equation 2.20 and expressing it in the most general format results
in equation 2.21. Applying boundary conditions 2.15 and 2.17 gives a solution to the constants
C1 and C2 , which are substituted to arrive at equation 2.24.
V/ = C1 + C2
(2.21)
C]
(2.22)
= 0(
73
9
C2 =2
(2.23)
L,
0 -
5+1
(2.24)
The relationship between the internal translation and rotation distribution along a beam in pure
bending can be found by first substituting equation 2.24 into 2.19 to get 2.25 and then integrating
to arrive at the general solution given by equation 2.26.
SCOS 0
u -LS
L
+1] -1
sin 0
20
2
2
-L
+1
(2.25)
-
(2.26)
+C3
Boundary condition equation 2.16 is used to find the value for C 3, which is then substituted and
combined with the fact that sine is an odd function to get the relationship for u, 0, and
in
equation 2.28.
C3
(2.27)
L2
2
1
1iFS+n
2-
2
0
LS
u= -L
-j
1
-
(2.28)
A practical bending mechanism will only apply translation and rotation at the ends of the beam
using rigid clamps instead of forcing a particular distribution along the beam's entire length. To
74
produce pure bending, the required motion of the clamps can be found by substituting the
coordinates of the beam at the clamp-beam interface into equation 2.28, namely =0 and =L,.
Because of symmetry, the motions at the clamp locations are mirror images and given by
equations 2.29 and 2.30. These equations are the governing translation-rotation relationship for
placing a beam in a state of pure bending.
u = IL,1- si()]
for
=0
(2.29)
u = I-LS[
for
= L,
(2.30)
2
0
-1
Plots of equations 2.29 and 2.30 showing the horizontal translation as a function of rotation for
the two beam ends are given in figure 2.6. These curves were created using the parameters from
the example beam in section 2.2. The length of the beam was L, = 4.5 inch (114 mm) and bent
through an arc of 113 degrees at maximum strain. To generate this arc each end of the beam is
rotated through approximately half of the total angle, or 57 degrees, which is the maximum
rotation in figure 2.6.
75
Beam Motion at Ends, Ls=4.5 inch
0.4
--
0.3 -
-- - - - - -- ------- ----
-- - -------
-- - - - - - ------ -----
----- --- - - -
-----
-----------
0.0
0
X:
--
(
-0.1 -
----------
- ---- - - -
-
=O
10
20-
30
40
-------- 50 -
60
=Ls
-0.2I
-0.3
-
-0.4
Rotation (degree)
Fig. 2.6. Pure bending motion of beam ends for the example strand.
2.4 Geometric Verification of Pure Bending Relationship
It is important to find an independent check to verify the derived pure bending relationship
between the horizontal translation and rotation at the ends of a beam given by equations 2.29 and
2.30. This will be done using a simple geometric argument.
Figure 2.6 shows a beam of length L, that was originally straight and subsequently loaded into an
assumed state of pure bending. Rigid clamps attached to the ends of the beam were rotated
through an angle 0 and translated a distance u to bend the beam into a constant arc with a radius
of curvature p and angle a. It can be shown that a is related to 0 by equation 2.31 for all
rotations, provided that the beam remains in a pure bending condition.
76
Ls/2
u
-
P
Fig. 2.7. Beam deformed into a state of pure bending.
a = 20
(2.31)
Using symmetry, the horizontal displacement of the rigid clamp, u, is the difference between the
undeformed and deformed distance from the beam centerline to the clamp. The undeformed
distance is L,/2 and the deformed distance can be found from the right triangle that has the radius
of curvature as the hypotenuse. The expression for u is given by equation 2.32 after
incorporating equation 2.31.
u =-L, - psin(0)
2
(2.32)
Since Ls remains constant throughout the bending progression, the radius of curvature can be
expressed as a function of 0 by combining equation 2.7 with 2.31 to produce equation 2.33.
77
P = LS
20
(2.33)
Substituting equation 2.33 into 2.32 results in equation 2.34, which is identical to the pure
bending relationship 2.29. A similar development can be used to verify equation 2.30.
u =I L 1- si
L O
2
(2.34)
Pure bending derivations based on both geometry and the constitutive equations for the internal
forces in a beam produced the same relationship between the horizontal displacement and
rotation. This nonlinear relationship of motion must be incorporated into some sort of
mechanism if it is able to load a beam in pure bending.
There are many configurations that could be devised to create the pure bending motion.
However, a mechanical device that could produce the precise translation-rotation nonlinear
motion would be relatively complex. Such a mechanism would be larger, more complicated, and
less reliable than a simpler system that would, instead, reasonably approximate the pure bending
relationship. It turns out that the movement required to trace the circumference of a circle is very
similar, although not ideal, to that required by equations 2.29 and 2.30 and would produce a good
approximation to pure bending motion.
Circular motion can be easily achieved using standard mechanical components. But this type of
movement introduces horizontal displacement errors when compared to the ideal pure bending
relationship. Fortunately, these errors can be minimized to acceptable levels by optimizing the
mechanism geometry.
78
2.5 ErrorMinimization
Of the various bending mechanism configurations considered, the basic layout shown in figure
2.8 proved to be the most robust and versatile. The components consist of two rigid beam
clamps attached at the ends of the beam. These clamps are connected to lever arms that rotate
about a fixed axis. The distance between the two axes of rotation is represented by L, and the
free length of the beam is L,. The lever arm length, r, can be chosen to minimize the amount of
pure bending error. Although the lever arm length is fixed during operation of the mechanism, it
can be designed ahead of time to produce minimal error over a specific range of bending.
The length of the beam, L,, does not change as it is bent. The rigid lever arms are simply rotated
so that the two ends of the beam move closer together and it is forced to assume the shape of a
circular arc. A detail worth mentioning is that the beam is not required to intersect the axes of
rotation as the bending motion progresses.
In addition to moving the two ends of the beam closer together, the rotations of the lever arms
translate the entire beam in a direction perpendicular to the page in figure 2.8a. Referring back
to figure 2.4, this has no effect on pure bending motion as long as the translation remains
symmetric about the beam's centerline.
Beam
Lever Arm
Axis of Rotation
(a)
79
Ls
]
rw4]
Ik
I
r
r
(b)
Fig. 2.8. (a) Side view of circular-type bending mechanism, and (b) top view of circular-type
bending mechanism.
Optimizing the mechanism to create quasi pure bending in the beam consists of comparing the
motion created by the lever arms to that required by the pure bending relationship. Since the
motion is antisymmetric for both cases, it is sufficient to do the optimization using equation 2.29
and an expression for the displacement-rotation caused by the lever arm.
-
u
U
LP
r
r
Fig. 2.9. Displacement at the beam end due to the lever arms.
80
The amount of displacement at the beam ends caused by the rotation of the lever arms can be
derived from the geometry in figure 2.9. The distance from the pivot axis to the free portion of
the beam is equal to r in the undeformed configuration. As the lever arms are rotated an angle 0
from the initial position, the horizontal distance from the pivot axis to the beginning of the rigid
clamp changes. This distance can be found from the right triangle. The net horizontal
displacement of the beam ends,
umech ,
is the difference between these two values as expressed by
equation 2.35.
= r - r cos6
U,,,ch
(2.35)
Equation 2.29 specifies that the amount of horizontal displacement required for pure bending
depends on the beam length, L. To perform a generalized optimization, this dependency should
be eliminated by nondimensionalizing the length terms in the relevant equations with Ls.
Dividing equation 2.29 by L, produces the nondimensional form for pure bending horizontal
displacement, iis,,, in equation 2.36.
UWd
= 1[I-
(2.36)
Nondimensionalizing equation 2.35 will be done after r has been expressed in terms of L. The
dimensions L, and L, are more important for the design of the bending mechanism than r
because gears will be used to rotate the lever arms in the actual device. With this in mind, r can
be expressed from the geometry of figure 2.8b as equation 2.37.
r = IL, - L)
2
(2.37)
81
A constant of proportionalityf will be introduced to express L, in terms of L, in equation 2.38
because Lp is simply a fractional length of L.
L =-L,
(2.38)
f
Substituting equations 2.37 and 2.38 into equation 2.35 and then dividing by L, produces
equation 2.39, which is the nondimensional expression for the horizontal displacement in the
quasi pure bending mechanism.
imech
=
(I- Cos)
1
(2.39)
An expression for the error between the ideal bending relationship and the approximate bending
mechanism can now be defined. There are only two variables for producing pure bending in a
beam: horizontal translation and rotation. Since the approximate bending mechanism is based on
the rotation of a lever arm, the error of the mechanism comes from the horizontal translation
component. And the error expression used to optimize the mechanism will be defined as the
difference in the horizontal displacement from an ideal pure bending device, as stated in equation
2.40.
Uero,
=Ui
(2.40)
U- mech
Including the details of equations 2.36 and 2.39 in 2.40 gives the particular error expression in
equation 2.41.
Wrror =- Icos
2
-
sin-- +
0
f
(1Cos
(2.41)
82
Curves of equation 2.41 could be plotted for many different values of the proportionality
constantf to find the optimum geometry of the bending mechanism over a specified range of
lever arm rotations, but a little math will help to quickly narrow down the possibilities.
This is done by requiring the horizontal displacements to be equal at some angle of rotation and
solving forf Setting the nondimensional equation 2.39 equal to 2.36 and solving forf results in
equation 2.42. Note that care must be taken not to improperly divide out the 9 during the
solution process because it is allowed to have a zero value.
f
cos9 - 1
cos 0 - sin 6
6
(2.42)
Taking the limit of equation 2.42 as 0 goes to zero reveals that the best value off for the start of
the bending process is 1.50. This value off translates into a value for r that is one sixth the
length of the beam, L, using equations 2.37 and 2.38. At a value of 9 equal to 80 degrees, the
best proportionality constant,f is 1.55.
These results forf provide a good starting point for the mechanism optimization, but they can be
misleading because the values are only best at a single rotation angle. In reality, the mechanism
must be able to provide minimum bending error over a wide range of lever arm rotations. For
that, equation 2.41 must be plotted as a function of 0 for various values off Applying the
insight gained from equation 2.42 the plots should begin with anfvalue of 1.50.
Figure 2.10 show curves of equation 2.41 for values off ranging from 1.50 to 1.57 over angles of
zero to 90 degrees. A maximum angle of 90 degrees is the applicable limit to equation 2.41
because the mechanism displacement given by equation 2.35 was derived using the lever arm
pivot axis as the reference point. This expression becomes invalid when the lever arm rotates
beyond the reference point which occurs for angles exceeding 90 degrees. If larger rotations are
needed for the error minimization then a new expression for mechanism displacement would
83
need to be derived. Ultimately this is not an issue because the maximum strains that the bending
mechanism will be designed to achieve will occur at lever arm rotation angles near 56 degrees,
as was shown by the example strand problem presented in section 2.2.
Nondimensional Error Minimization
0.0200
w
0
0.015 - ---------------
----
---------
---
f=
f=
-a-f =
-- f =
-x--- f=
0.010 - --------------------------------- - - -
.
-- -
0.005
0
Z
-----
- ---- - - -- ----
-
- -- --
0.000 1
--------------------
-0.005-
-- - - -- -
-- - -
__-
- --
---------------
1.50
1.52
1.53
1.55
1.57
-0.010
0
20
40
60
80
100
Rotation Angle (deg)
Fig. 2.10. Plot of nondimensional bending displacement error.
Over the full range of angular rotation up to 90 degrees the valuef= 1.55 has the least average
error. But up to a maximum rotation of 56 degrees the valuef= 1.53 has the least overall error.
Consequently, this value off will be used as the basis for designing the bending mechanism.
In the figure, all but the first curve cross the zero-error axis at some point. These locations
represent the solution to equation 2.42 for that particular value off A beam loaded by a bending
mechanism under these conditions would actually be in a state of pure bending provided that it
was not experiencing plastic deformation at its outer surface.
84
The error analysis does not provide a sense of how close to pure bending the nondimensional
geometry would create in an actual application. It may be that all of the curves plotted are too
inaccurate over the range of interest. Or it is likewise possible that even the curve plotted with
the worst average error, namelyf= 1.50, would produce sufficiently accurate bending results.
The analysis is only a way to compare one quasi-bending geometry to another and to show which
configuration is potentially the best. The error analysis could be repeated using the dimensional
equations and the example beam length of L, = 4.5 inches to find the amount of displacement
deviation from the ideal case of pure bending. But that still would not provide a sense of the
bending distribution within the beam.
There are four possible ways to estimate how closely the beam comes to pure bending: first, a
finite element program could be used to model the motion of the ends of the beam and solve for
the stress distribution. Second, the governing constitutive equations, 2.9-2.11, could be
numerically solved with the appropriate boundary conditions to find the internal moment
distribution. Third, estimates can be made on the internal stress distribution using smalldisplacement beam mechanics. Fourth, an upper bound on the bending state at the center of the
beam can be approximated by comparing the change in bending strain to the change in
displacement. This last method was used because the other methods either required large time
investment or resulted in questionable accuracy.
The procedure for the bounding estimate is described in Appendix A. It shows that even for the
non-optimized case off=1 .57 the bending state at the center of the beam remains within 1% of
the ideal bending state.
Chapter 3
Design
The previous chapter developed the analytical relationships for large-displacement pure bending
motion. It was shown that there was a relationship between the rotation and displacement at the
ends of a beam in order to produce pure bending. Due to the nonlinear nature, the displacementrotation relationship changes with increased applied bending. This motion is difficult to create
using simple machine components and so an approximate approach is justified based on circular
motion. The geometry of the conceptual bending mechanism requires optimization to minimize
the displacement errors introduced by the circular movement.
This chapter extends the analytical development to create a practical mechanism for loading
Nb 3Sn strand in a bending state for critical current testing. Operating requirements for the
mechanism will first be discussed followed by the design and construction considerations that
went into the principal components.
3.1 Operating Conditions and Requirements
Pure bending critical current tests of the Nb 3 Sn superconducting strand were done in the
0195mm (7.68 inch) bore, 20T, Bitter resistive 20MW DC magnet at the National High
Magnetic Field Laboratory (NHMFL) in Tallahassee, Florida. Figure 3.1 shows an illustration of
86
the magnet and the accompanying cryostat insert [3.1]. The cryostat provides an environment
suitable for performing low-temperature tests such as superconductor critical current
measurements. The cryostat has an outer chamber which is filled with liquid nitrogen to reduce
the radiation heat loss and an inner chamber that uses liquid helium to maintain a 4.2K test
temperature. The cryostat reduces the available magnet diameter from a warm-bore size of
195mm (7.68 inch) to a cold-bore size of 170mm (6.70 inch).
Kc
~_
~
-
Outer chamber filled
witlh
liquid nitrogen
Testing region filled
with liquid helium
Fig. 3.1. Drawing of the 195mm bore, 20T Bitter resistive magnet and cryostat at the National
High Magnetic Field Laboratory (NHMFL) in Tallahassee, FL [3.1].
87
Since the field center of the magnet is 74.13 inches (1883mm) from the top flange of the
cryostat, the bending mechanism has to be attached to the end of a probe which positions it at the
correct location. The probe serves the multiple purposes of resisting the forces generated during
testing, allowing remote access for adjusting the bending load on the test samples, and providing
a framework for the wiring and instrumentation.
Two Nb 3 Sn strands were selected for the bending tests: an Intermagnetics General Corporation
(IGC) strand used in the ITER Central Solenoid Model Coil and a recently developed Oxford
Superconductor Technologies (OST), type 1, billet number 7567 strand. Both strands have a
diameter of 0.81mm and are internal tin designs.
There are many important environmental conditions and requirements that must be endured by
the testing equipment. Each one has important consequences that affect the overall design. They
can be divided into the categories of Operating Conditions and Specifications which are outlined
below:
Operating Conditions
1. Portions of the probe and the entire bending mechanism with the test samples will be
submerged in a liquid helium bath. This bath keeps the samples at a constant 4.2K,
which is the boiling temperature of liquid helium at atmospheric pressure. Low
temperature is necessary so that the Nb3Sn samples will remain below their critical
temperature. The liquid helium bath establishes a stable operating temperature that
remains constant throughout the tests. The various materials should perform their
functions under these conditions without damage. Particular consideration should go into
the interactions of materials with differing Coefficients of Thermal Expansion (CTE) as
the components are cooled from room temperature to 4.2K. Wires that move during
testing should be electrically insulated with a material that can flex without damage.
88
Parts that require lubrication cannot be lubricated with grease because grease would
freeze and not provide any benefit at 4.2K. A dry lubrication such as graphite or
molybdenum disulfide should be used instead.
2. Magnetic field intensities for the testing will range from 12T to 15T, therefore
ferromagnetic materials should not be used in the mechanism or probe. Magnetic
materials would generate large forces that could damage the probe, mechanism, cryostat,
or even the magnet. In addition, a sufficient presence of magnetic material would distort
the magnetic field in the region of the test sample.
The forces on a current-bearing sample in a high magnetic field can be significant. The
critical current of a recently tested sample of the OST strand at 4.2K was approximately
300A at 12T and 220A at 14T [3.2]. The Lorentz load on an 11.4cm (4.5 inch) long
sample at a magnetic field strength of 12T would be 410 N (92 lbf). This load is
calculated using equation 3.1, where I is the current, B is the magnetic field strength, and
f is the length of the sample.
F = (I xB)
(3.1)
A distributed force of this amount would obviously distort an unsupported test strand that
has a diameter of 0.81mm (0.032 inches) and the strength properties of annealed copper.
This distortion would mean that a pure bending test would not be possible unless the
strand was supported by some sort of structure that allowed it to be placed in pure
bending while keeping it from being distorted by the Lorentz force.
To support the strand, the test strand is placed on a support beam with sufficient stiffness
to significantly reduce the amount of distortion caused by the Lorentz force. The pure
bending motion is then applied by the bending mechanism to the support beam and the
89
Lorentz load forces the strand to conform to the radius of curvature of the beam. Thus,
the support beam serves as a template for the pure bending of the test strand. The
additional bending stiffness of the support beam is necessary to support the test strand but
it also increases the amount of force that must be provided by the bending mechanism.
Details of this support beam are given in the design section.
Requirements
3. The mechanism should load the strand in a strain state that is as close to pure bending as
possible over its designed operating range. An error analysis is used to optimize the
configuration over the limits specified.
4. Costs to develop and build the bending mechanism should be kept as low as possible.
Use of standard materials and practices will help to reduce costs. Tolerances should be
generous enough so that expensive procedures are not necessary, but small enough so that
dimensional inconsistencies will not create significant errors in the bending distribution.
5. The strand test length should be as long as possible because the characterization of
superconducting strand is more accurate with longer samples. The test for the critical
current of a superconductor consists of measuring the voltage drop across a sample length
as the current is increased. The voltage drop is more difficult to measure in short samples
than long ones because voltage is the line integral of electric field, which means that the
voltage drop is greater for a longer sample. A higher voltage drop is preferable because it
is easier for equipment to detect. In addition, noise from the environment is less likely to
obscure larger voltage drop measurements.
90
Strand geometry is another reason why the test length should be as long as practical. As
discussed in chapter 1, the strand is composed of twisted superconducting filaments that
are rotated at a specific pitch within a copper matrix. The intent of the bending test is to
characterize the properties of the bulk strand as a single entity. Therefore, it is important
to have a long enough sample to accurately represent the average properties of the strand.
Because the strand filaments are twisted, the minimum strand length should be at least
several twist pitches long in order to capture the strain changes that the filaments
experience as they rotate through the regions of compressive and tensile strain produced
by the bending test.
6. The mechanism should be capable of loading the sample to a maximum bending strain of
0.7%, or possibly 0.9%, at the outer surface of the strand. Strain levels of these
magnitudes have several implications on the design. First, for the given strand diameter
and design test lengths this amount of strain requires the strand to be bent into an arc of
more than 114 degrees for the case of 0.7% strain and 151 degrees for a strain of 0.9%.
Second, the bending moment in the support beam is significantly greater at the higher
strains than at the lower strains, produces large forces in the loading mechanism. The
design of the mechanism and the materials must be able to withstand these forces while
simultaneously meeting the other constraints.
7. The test sample must remain perpendicular to the magnetic field throughout the entire
bending procedure. This orientation requirement is standard procedure for critical current
measurements and more closely resembles the conditions that a Nb 3Sn strand would
experience in a fusion magnet.
91
In strain-based critical current tests of short samples it may be possible to ignore the
change in the orientation of the sample relative to the magnetic field as the sample is
distorted. However, as reported above, the sample in the large-displacement bend test
would be bent into a circular arc of 151 degrees. This would have a significant effect on
the perpendicular component of the magnetic field that of each portion of the strand
would experience if the bending plane were in the wrong orientation. Consequently, the
mechanism must operate in the magnet so that the bending plane remains perpendicular
to the magnetic field. For the same reasons this orientation is a requirement for the
Lorentz force to consistently load the strand against the support beam.
8.
The mechanism should be capable of cyclic testing where the bending load on the strand
can be fully reversed. The loads on fusion magnets, such as the ITER central solenoid,
are cycled. This cycling may cause fatigue degradation in the superconducting strand. A
bending mechanism that is capable of fully reversible cyclic testing would be beneficial
to studying this effect.
3.2 Bending Operation
The mechanism design shown in figure 3.2 is the realization of the conceptual method for
producing quasi-pure bending as introduced in section 2.5 (figure 2.8). This particular
arrangement proved to be the most robust and versatile of all the configurations considered. It
consists of a series of gears that translate the bending motion to the Support Beam holding the
test sample.
92
Test
Samples
Support
Beam
Beam
Clamp
Input Shaft
Coupler
Torque
Top
Plate
4C3
CO
(b)
(a)
Input
Shaft
i
Thrust
Bearing
Plate
Spacer
Torque
Gear
Bottom
Plate*
0
Drive
Shaft
(c)
Fig. 3.2. Bending mechansim (a) complete mechanism, (b) with strand mounting system
removed, and (c) inner gear train.
93
An 82 inch (208 cm) long shaft with an attached Hand Crank is connected to the mechanism via
the Input Shaft Coupler. Rotating this shaft provides the torque to operate the bending
mechanism.
When the shaft is rotated, a worm on the end of the Input Shaft translates the input torque 90
degrees to the Drive Shaft wormgear. This wormgear motion causes the two Torque Gears that
are connected directly to the Torque Arms to rotate in opposite directions. The Beam Clamps
are connected to the Torque Arms which load the ends of the Support Beam when rotated.
The relationship between the translation and rotation produce by the mechanism is chosen to
produce quasi-pure-bending in the Support Beam over a large range of motion. This bending
evolution is shown in figure 3.3 beginning with the initial, undeformed condition. The figure
continues with Torque Arm angular rotations of 20, 40, and 70 degrees. This severe amount of
rotation was not selected simply for the illustration but actually represents the deformed
condition of the Support Beam at a strain state just below the maximum limit of 0.9% bending.
94
.1*.
.
K
(a)
6
0.
b)
9
(b)
I.
0h
(c)
(d)
Fig. 3.3. Bending Mechanism Operation (a) 0* rotation angle, (b) 200 rotation angle, (c) 400
rotation angle, and (d) 70* rotation angle for the Torque Arms.
95
3.3 Sample Mounting Assembly
The sample mounting system consists of the Support Beam, the Beam Clamps, and Current
Joints, as shown in figure 3.4. Three superconducting test samples are mounted in grooves that
are machined into the Support Beam. Each of the three sample strands will be subjected to the
same testing conditions and should produce similar bending characterization. But it is possible
that one of the strands may be damaged before testing, resulting in a lower characterization. If
only two strands were tested there would be no way to know if a lower characterization was
simply because one strand had been damaged or whether the other strand was an exceptional
sample. Therefore, a minimum of three strands were chosen to help with the comparison by
providing an additional sample. Of course, more samples would be better but this is not practical
due to the sizing restrictions on the mechanism and the amount of time that would be required to
characterize more strands in the limited time slot scheduled for testing at the NHEMFL.
Support
Beam
Beam
Clamp
Joint
Block
Test
Sample
Joint
Wire
Fig. 3.4. Strand Mounting System.
96
3.3.1 Support Beam
The Support Beam is the backbone of the test samples. It has the dual purpose of supporting the
strands against the Lorentz force while simultaneously serving as a template that uses this force
to compel the strands into a bending state. The bending mechanism deforms the Support Beam
to produce the desired radius of curvature rather than directly applying force to the fragile
superconducting strands.
The test strands are placed in grooves in the Support Beam so that they are adequately supported
against the Lorentz forces through the full range of bending motion. The samples are not affixed
to these grooves so that there is no shear coupling between the two components. Instead, the
strand floats in the groove and relies on a combination of bending motion and the Lorentz force
to keep the strand in the groove. The strand is held at the ends by a soldered joint underneath the
Beam Clamps. The strand support grooves are machined to be at least as deep as the diameter of
the strand so that the strand is not crushed and damaged by the Beam Clamps. This requires the
Support Beam to be thicker than the strand diameter and thick enough so that additional material
remains for moderate stress flow continuity.
Machining grooves into a rectangular cross-section Support Beam has the effect of moving the
neutral axis away from the initial position half way between the two outside surfaces. Moving
the neutral axis means that when the beam is loaded in pure bending one surface will experience
a higher magnitude stress state than the opposite face. Under these conditions a beam with the
machined grooves will reach its elastic limit before an equivalent beam that was not machined.
Additional machining of the Support Beam could be done to adjust the position of the neutral
axis so that it coincides with the center of the sample. Any machining of the Support beam must
be symmetric above and below the beam centerline so that a twisting moment is not introduced
with the bending deformation.
97
Figure 3.5 shows the layout of the Support Beam. On one side (fig. 3.5a) of the beam, small
grooves for the test samples run the length of the beam and connect to larger grooves at the ends.
These larger grooves are for the transition joint between the superconducting samples and the
copper current leads that provide the input power. The holes near the ends are for bolts that are
used to fasten and align the Support Beam. These holes do not need to be symmetrical about the
beam centerline because they are positioned within the region that is supported by the Beam
Clamps. The opposite side of the beam (fig. 3.5b) has a series of grooves that move the
geometric neutral axis of the beam to the center of the test samples. These adjustment grooves
were designed to be a larger diameter and a shallower depth than the test sample grooves, which
was done to reduce the potential stress concentrations and preserve the integrity of the Support
Beam. Using shallower grooves required that six had to be machined to adjust the neutral axis
rather than just three.
K
(a)
Fig. 3.5. Support Beam Layout (a) Front View and (b) Back View.
(b)
98
In addition to providing strand support, the Support Beam must have enough bending stiffness to
render the effects of the Lorentz force on the bending distribution insignificant. The Lorentz
force is a distributed load on the beam and creates an internal shear which modifies the bending
distribution and introduces error to the bending state. To reduce this error, the Support Beam
should be thick enough so that the internal moment distribution is almost entirely made up from
the applied torque, thus reducing the significance of the Lorentz component. An analysis for
estimating the effect of the Lorentz force on the bending distribution is presented in Appendix A.
Unfortunately, the thickness requirements for the Support Beam have negative implications for
both the strength of the bending mechanism and the elastic limit of the beam material. A greater
bending stiffness means that the mechanism components must be able to withstand the larger
forces. A thicker beam has surfaces at larger distances from the beam neutral axis, which means
that the beam material must have an elastic limit high enough to sustain elastic behavior up to the
maximum desired bending state.
After an extended search of possible materials it was decided that the titanium alloy Ti6A14V
had the best combination of properties for the Support Beam. Measured data for 0.064 inch
(1.626 mm) thick Ti6A14V sheet in the annealed condition shows that the elastic strain limit
increases from 0.73% at room temperature to approximately 1.4% at 4.2K, as indicated by figure
3.6 [3.3,3.4]. This high magnitude elastic strain limit is required for the Support Beam material
because its additional thickness means that it experiences a larger strain state than the test
sample.
99
20
Ti-6AI-4V
0, 064 IN SHEET
ANN
240
42F
-425F TO FT, L(4)
To )OWF
(3)
RT
320
160
}RT
____
120
20F
400F
80
TNOF
00F
_______
IWXOF
40
'TENSION
0
0
0.004
G.008
0.012
STRAIN - IN
PER
0.0It,
IN
Fig. 3.6. Stress-strain curves for Ti6Al4V annealed 0.064 inch sheet at various temperatures.
The general expression for the strain in a beam as function of radius of curvature was derived in
Section 2.1 and summarized by equation 2.5. It is restated here as equation 3.2 for convenience,
recalling that the strain, s, is a function of the distance from the neutral axis, y, and the radius of
curvature, p.
=
(3.2)
This equation applies to both the test strand and the Support Beam which experience the same
radius of curvature. However, the distance from the neutral axis of each of these components to
their respective outer surfaces results in two different values for y. Applying equation 3.2 to the
Support Beam and test strand and setting the radius of curvatures equal produces a relationship
100
between the strains in the two components, given by equation 3.3. This relationship is valid in
general and can be applied to relate the strains at any position within the two components, but its
use here will be limited to relate the maximum strains at the outer surfaces of the Support Beam
and test sample.
6
beoam = Estrand
Ybea
(3.3)
strand
The geometry referred to by equation 3.3 is clarified by figure 3.7 where the distance from the
strand's neutral axis to its outermost surface is given by ystrd. The parameter ybea is similarly
the distance from the Support Beam's neutral axis to its surface. For the case of pure bending,
the neutral axes of the Support Beam and test sample should be coincident to avoid axial strain in
the strand.
Neutral
Axis
Ybeam-
Fig. 3.7. Support Beam and test strand distances from neutral axis to outer surfaces
101
Sheets of Ti6A14V alloy are rolled to standard commercial thicknesses and include 0.03125 inch
(0.794 mm), 0.0625 inch (1.588 mm), 0.125 inch (3.175 mm), etc. The Support Beam cannot be
made from the 0.03 125 inch (0.794 mm) sheet because it is too thin to fully contain the 0.81 mm
(0.03189 inch) diameter strand. And the 0.125 inch (3.175 mm) sheet is too thick because it will
result in surface strains beyond the elastic limit of the alloy when bent to the maximum strain
state.
For the Nb 3Sn strand to be tested to a maximum bending strain of 0.7% a sheet thickness of
0.0625 inch (1.588 mm) was selected. Inserting the values of ybeam= 0.03125 inch (0.794 mm),
ysfrand=
0.01594 inch (0.405 mm), and Faad= 0.7% into equation 3.3 reveals that the strains at the
outer surfaces of the Support Beam will reach a magnitude of 1.37%, which is just below the
elastic strain limit of the chosen Ti6Al4V alloy at 4.2K. In addition, a Support Beam made from
the 0.0625 inch (1.588 mm) sheet will have enough thickness for machining the strand grooves
and sufficient bending stiffness to reduce the effects of the Lorentz load on the bending
distribution. As part of the iterative design process, it was found that a Support Beam height of 2
inches (50.8 mm) would produce good bending stiffness while providing enough space to have
adequate current joints for the three test samples.
With the thickness and height of the Support Beam known, an estimate can be made of the
amount of torque required to deform the beam to the maximum bending state. The internal
moment, M, of a beam made from a material with an elastic modulus, E, and a moment of
inertia, I, bent into a radius of curvature, p, was originally presented in Section 2.1. This
expression is restated as equation 3.4.
M =
(3.4)
p
102
The moment of inertia for a rectangular cross section beam is given by equation 3.5, where h is
the beam thickness and b is the height. This equation provides an upper bound for the moment
of inertia of the Support Beam because the actual beam will have machined grooves which
reduce this value.
I
12
bh'
(3.5)
Substituting equation 3.5 into equation 3.4 and combining the expression for the strain of the
strand as a function of curvature (equation 3.2) yields the magnitude of the internal moment of
the beam in terms of more convenient parameters, equation 3.6. In creating this equation, the
term ystrand was replaced with half of the strand diameter, d/2.
1 Ebh 3
M = I-b
6 d
(3.6)
Esra
Table 3.1. Values for estimating Support Beam torque.
E (4.2K)
b
h
d
&strand
18.9
2.0
0.0625
0.03189
0.007
Mpsi
inch
inch
inch
in/in
130
0.0508
0.00159
0.00081
0.007
GPa
m
m
m
m/m
An estimate for the torque required to deform the Support Beam can be found by substituting
geometry and material properties into equation 3.6. These values for the Support Beam are
outlined in table 3.1 and result in a required applied torque of 337 inch-lbf (38 N-m). This
torque estimate was used to determine the gear strength requirements in the design of the
bending mechanism.
103
3.3.2 Current Joints
Electrical joints are used to transfer current coming from the power supply to the
superconducting test sample. The current leads should have a rigid section that will support the
strand against the Lorentz force and a flexible region that will allow for the movement of the
bending mechanism. In addition, the joints should occupy as little space as possible in the
magnet bore so that the test sample length can be longer.
Combining all of the requirements for the current joints resulted in the design illustrated in figure
3.8. The small diameter test strand comes across the face of the Support Beam and makes a 90
degree bend at the end where it meets with the larger diameter copper Joint Wire. The strand is
heat treated in this configuration to avoid the damage that would occur with trying to bend a
straight section. The strand is soldered into a continuous machined groove in the Joint Wire so
that it remains below the surface. A larger groove is machined in the Support Beam to accept the
Joint Wire. The Joint Wire fits into a hole in the Joint Block where it is soldered. A bolt runs
through the Joint Block, Support Beam and Beam Clamps to hold all of these components in
position. A flexible cable, not shown in the figure, is soldered to the remaining hole in the Joint
Block at one end and connected to a solid copper current lead at the other. This solid current
lead runs through the probe to the outside room environment where it receives current from the
power supply. This same style joint is used on all of the connections and provides a way to
independently provide current to each of the samples.
104
WhIm
(a)
(b)
Fig. 3.8. Current joint design with (a) All Components, and (b) Cut-Away View
It is clear from figure 3.8 that there is no insulation between the Joint Blocks and the clamps.
There is little concern for a short circuit across the Beam Clamps or Support Beam because of
the large relative resistance of these components compared to the superconducting sample. The
characterization of the sample will be completed before it fully transitions to a normal resistive
state where current sharing would be an issue. Mounting a superconducting sample to a metal
support system has been used in a majority of the strain-behavior critical current experiments.
It was important from a current transfer standpoint to increase the length of the joints to be as
long as possible. By including the 90 degree bends at the ends of the test samples, the total
current joint length is greater than 1.0 inch (25.4mm) long. This increased length provides the
additional distance needed to transfer the current between the copper wires and the test strand.
105
This particular design of the current joints was chosen so that the overall length of the test
sample would be as long as possible in the magnet bore. Otherwise the 90 degree bends would
have been avoided, because they greatly complicate both the heat treatment and mounting
procedure for the strand.
The voltage taps used for sample characterization measurements are placed so that they are not
too close to the current joints. After the current passes into the strand at the current joint, it
redistributes throughout the cross section of the sample for some distance. If the voltage taps
were placed in this redistribution region, they would measure an apparent resistive component in
the sample. This also reduces the measurement sensitivity. So it is important that the voltage
taps be placed sufficiently far away from the current joints. To ensure enough space for current
redistribution, a value of 1.0 cm (0.394 inches) was used for the distance between the end of the
current joint and the position of the voltage taps [3.5].
3.4 Strand Heat Treatment
As described in section 1.4, the strand must be heat treated so that the niobium and tin will react
to form Nb 3Sn superconducting filaments. Before heat treatment the strand is ductile and can be
readily handled. But after heat treatment extreme care must be used in handling the strand so
that the brittle Nb 3Sn filaments will not be damaged. The strands must be rigidly supported
during the heat treatment process. A common technique for holding samples during a heat
treatment is to use quartz glass tubing. However, the current joint design outlined in Section
3.3.2 requires a 90 degree bend and quartz glass tubing would not work because the samples
could not be safely removed.
A heat treatment fixture was designed for the test samples. It is shown in figure 3.9 and consists
of a main fixture that has machined grooves for supporting and shaping the strand and a fixture
cap that holds the strand in place during the heat treatment.
106
(a)
(b)
Fig. 3.9. Strand Heat Treatment Fixture, (a) Fixture and Cap, (b) Main Fixture
The fixture is made from the titanium alloy Ti6Al4V. This material was selected because it has a
lower thermal coefficient of expansion (CTE) than the strand, which means that as the fixture
does not expand as much as the strand when heated. With the aid of the fixture cap, this
expansion differential keeps the strand tight in the machined grooves throughout the entire heat
treatment temperature range. This tight fit is essential to producing a strand with very straight
regions and 90 degree bends.
107
The heat treatment fixture had to be made so that there was a precise fit with the fixture cap.
Wire EDM (Electrical Discharge Machining) was used to make the parts to very accurate
dimensions. The EDM process is independent from the mechanical properties of the material
and, instead, depends on the thermal and electrical conduction. Wire EDM uses a thin brass wire
as the electrode which continuously moves past the material being machined. The surface of the
wire gets eroded away by the electrical discharge and so new wire is fed at a sufficient rate to
keep the wire from eroding all the way through. Titanium does not have particularly good
thermal or electrical conduction properties and can take a considerable amount of time to
machine with EDM. The fixtures and caps took a total of 7 hours and 25 minutes of actual
machining time on a Charmilles model ROBOFIL 240cc machine and consumed 2.217 miles
(3568 meters) of 0.010 inch (0.254mm) diameter half-hard brass wire.
The bend in the heat treatment fixture was designed with a radius of 0.125 inch (3.175 mm),
which was considered the minimum acceptable bend radius for the superconducting strand.
Bending the strand into too small of a radius would cause internal damage in the unreacted
sample and significantly affect the performance after heat treatment.
Before being heat treated, the internal tin design strand has regions of pure tin. This tin would
melt and flow out of the strand during the heat treatment process if special precautions were not
employed. When mounting the strand in the heat treatment fixture, a single continuous length is
woven into the grooves and the two ends are extended beyond the fixture approximately 30
inches (76 cm) and crimped. Using a single piece of strand leaves only the two ends as possible
routes for tin leakage. If tin does leak it will come from the extra length of strand which is
discarded after the heat treatment.
Figure 3.10 is an end detail of the heat treatment fixture that reveals how the strand is supported
as it is wrapped in the grooves. The strand is placed in a groove and then wrapped around a tab
on the fixture to reverse direction and continue onto the adjacent groove. These tabs also hold
the strand tight in the grooves so that the fixture cap can be applied or removed without
108
disturbing the strand. The figure of the heat treatment fixture shows that it will hold six samples.
This leaves three extra samples in case one or more are damaged during mounting.
Fig. 3.10. Detail of heat treatment fixture end.
As discussed in section 1.4, different strand designs require different heat treatment processes.
Heat treating causes the component materials within the strand to react and form the Nb 3 Sn
superconducting compound. Since there are various design geometries and techniques for
making the strand, each one requires a tailored heat treatment schedule to create the best
conditions for the reactions to take place. There are balances between heating the strand up
incorrectly and causing internal voids, heat treating at too low a temperature and not allowing the
tin and niobium to completely react, or heat treating at too high a temperature and forming
undesired compounds such as excess bronze. A strand manufacturer relies on past experience
and trial-and-error to develop the best heat treatment process that will result in the greatest
current capacity or optimum AC loss behavior for the given strand design.
Since the IGC and OST strands are slightly different designs, they must heat treated separately.
A total of three different heat treatment fixtures were made to heat treat the various test samples:
two fixtures of different test lengths for the IGC strand and one for the OST strand. The heat
treatment schedules for these two strands and pictures of the actual fixtures are presented in
Appendix E.
109
3.5 Mechanism Gear Design
The entire bending mechanism, including the sample mounting system, is shown in figure 3.11.
This design was the result after satisfying the numerous operational requirements. The bore size
of the test magnet was the most important factor in the final geometry. Other factors such as
achieving the longest test sample length, having three test samples, and including a strand
Support Beam dictated the remaining parts of the quasi-pure bending mechanism. The final
mechanism design emerged after an iterative process of adjusting the secondary components to
satisfy the primary factors. The gear elements were the most significant secondary influence and
governed the design of much of the mechanism.
Ef
Fig. 3.11. Bending Mechanism.
110
All of the components of the bending mechanism, except for the test strand and the Support
Beam, are constructed from the same material. Using a single material eliminates the geometry
relationship changes that would occur during cooling if the mechanism were made from
materials with different thermal coefficients of expansion (CTE). Preserving the distance
relationships is important for a machine that relies on geometry to create bending motion. Also,
the accuracy and strength of the gears used in the mechanism depend on the separation distances
between gear centers. By having a uniform material for the gears and gear housing, the changes
in the gear center distances perfectly compensates for any changes in the gear dimensions.
Austenitic 316 stainless steel was chosen as the material for the bending mechanism based on
magnetic and strength properties. Although 316 stainless steel has a relative magnetic
permeability of 1.008 its strength characteristics were superior to the other two material
candidates, brass and aluminum. Using the higher strength material meant that the mechanism
components could be made smaller, thus allowing for a longer test sample in the limited space
magnet bore.
The specific austenitic stainless steel choice of type 316 was due to its characteristics in a 4.2 K
environment. Type 316 is often used in cryogenic applications because of its superior fracture
toughness. It has high creep strength, a relatively low thermal conductivity, and better corrosion
resistance than types 302 or 304. Many cryogenic applications use type 316L because the lower
carbon content results in better welds. Welding is not necessary for the construction of the
bending mechanism and regular 316 was selected because it is less expensive and more readily
available.
Applied torque from the Input Shaft has to be leveraged and directed to the sample Support
Beam by the gear train. One of the requirements of the gear train is that it must rotate and
translate the ends of the Support Beam in order to produce the bending motion. There are
various gear systems that could have been used to create a mechanical advantage while
producing rotations in opposite directions from a single rotation source, but none were as robust,
111
simple, and space conserving as the worm and wormgear. Originally a spur gear system was
considered, but this required a much more complex arrangement with several stages of gears to
have the strength and purpose of the simpler design shown in figure 3.12. With this design, the
single worm on the Drive Shaft is able to simultaneously step down the gear ratio and rotate the
Torque Gears in opposite directions.
Input Shaft
Drive Shaft
Torque
Gear
Fig. 3.12. Bending Mechanism Gear Train.
112
The bending mechanism was designed to be as flexible as possible so that it could be used with
various types of samples. This required the strong and interchangeable connections provided by
the involute splines used on the Input Shaft and Torque Gears. Three different Sample Mounting
Assemblies were prepared for testing on the bending mechanism. During the tests, the module
design of the bending mechanism will allow the test samples to be quickly changed.
The input torque for the bending mechanism is provided by hand rotation. Thus, the gear train
does not need to be designed to operate at high speeds or for a large number of cycles. This
reduces the effects of wear and fatigue on the gears and leaves only strength requirements.
The tooth sizes for the bending mechanism were chosen based on the magnitudes of the loads
throughout the gear train resulting from friction and applied torque. The tooth size chosen for
the Torque Gears and the corresponding worm on the Drive Shaft determined the range of
available diameters for these components.
Sizing of the various gear components came after selecting the gear tooth sizes. There are
several gear design practices that also contributed to the geometry. The most significant of these
is that there should be at least 26 teeth on a wormgear to avoid undercutting of the teeth which
reduces their strength [3.6]. This minimum number of recommended gear teeth sets a minimum
diameter for the wormgear and worm for a given tooth size.
Originally, the gear train was designed based on the ANSI (B6.9-1977) standard for singleenveloping fine pitch worm gears [3.7]. After contacting several gear manufacturers it became
clear that custom tooling would need to be purchased to produce the gears that had been
optimized to satisfy the bending mechanism requirements. In order to lower production costs,
the bending mechanism was redesigned based on using helical gears in place of the singleenveloping wormgears.
113
Helical gears are not as strong as similar wormgears because they only have a single point
contact with the worm as opposed to a line contact that distributes the load over a greater area of
the tooth. Consequently, the finished gears were assembled and lapped with compound to create
a wear pattern that helped to spread out the load.
The gear train design had the greatest influence on the overall geometry of the bending
mechanism. Determining the final geometry was an iterative process that was balanced by the
other mechanism requirements. The equations that were used for the sizing and strength of the
gear components are outlined in Appendix B.
Gears made from stainless steel can be a problem from a friction standpoint: stainless steel is
well-known for galling and cold-welding to itself under stress. Since shaft bearings and other
materials could not be used to mediate the stainless steel interactions in the mechanism, there
was concern that the thrust surfaces and gear teeth would be damaged and potentially fail if
operated without lubrication.
Standard lubricating methods could not be used in the cryogenic environment. Grease would not
work at 4.2K because it would freeze and flake off of the surfaces. Brass bushings as the bearing
surfaces would introduce an additional level of complication to the mechanism design because of
the different thermal coefficient of expansion from the 316 stainless steel. A dry film lubricant
was determined to be the best solution to the friction issues.
Of the various dry film lubricants available, Molybdenum Disulfide was determined to be the
best for the conditions. It is often used in cryogenic applications requiring motion and has a
lower coefficient of friction at 4.2K than either graphite or Tungsten Disulfide [3.8,3.9].
114
The bearing surfaces on the Upper and Lower Support Plates and the Thrust Plates were
electroplated with silver to provide a good foundation that would reduce the coefficient of
friction by introducing a dissimilar material from the stainless steel. Since silver cannot be
directly applied to stainless steel, the surfaces were first coated with copper. After silver plating,
powdered Molybdenum Disulfide was mixed with ethyl alcohol and sprayed on the gear
components. It was then worked into the components by hand. The dry lubricant adhered to the
silver coated surface far better than the stainless steel surfaces.
3.6 Probe Design
The probe provides the support structure for the bending mechanism and instrumentation. It
extends the mechanism into the liquid helium bath and positions the test samples at the field
center of the magnet. The probe must have enough strength to resist the Lorentz forces and keep
the various components aligned during testing and transportation. It should also be designed to
minimize the amount of heat energy that is conducted to the liquid helium bath. Too much heat
transfer will cause the helium to boil off quickly.
The probe design for the bending mechanism is shown in figure 3.13. The bending mechanism
is attached to the bottom and is positioned so that the center of the magnetic field coincides with
the test samples. A helium fill tube is provided to transport the liquid helium from the helium
Dewar to the bottom of the cryostat. Filling the cryostat from the bottom is much more stable
and allows the helium vapor to cool the probe as it rises to the top and escapes to the atmosphere.
115
O
M:ftfh_
G-10
Plates
Flange
Plate
Helium
Fill Tube
Bending
41
1mechanism
Flange
Ie
Insulation Plate
Current
Lead Tubes
Hand
Crank
Fig. 3.13. Probe design.
A hand crank is attached to a stainless steel shaft that connects to the bending mechanism Input
Shaft. This provides the means for applying the torque to operate the bending of the samples. A
series of stainless steel threaded rods connected by glass-epoxy Gi0 plates provide the probe
structure. The GlO plates are excellent thermal and electrical insulators and remain stable in the
cryogenic environment.
The Flange Plate is where the probe attaches to the cryostat. The various shafts and tubes are
electrically insulated from the cryostat by the GlO Flange Insulation Plate. Copper Current Lead
Tubes are used to vent the helium vapor. They support the current lead wires and ensure that
these wires remain as cold as possible to maintain a low electrical resistance.
116
-Cryostat
Flange
41.50
-dQ
ci
I~FDI
9.75
7
74.13
Magnet
Center
75.93
Mechanism
Top Plate
06.650
74.13
88.00
Hel ium
Fill Tube
-FieId
Center
89.75
(a)
(b)
Fig. 3.14. Drawings of (a) cryostat, and (b) probe. All dimensions are in inches.
117
The inside dimension of the magnet cryostat are shown in figure 3.14a. These dimensions were
measured directly from the existing cryostat and are smaller then the drawings published on the
NHMFL website. The important dimensions of the probe are given in figure 3.14b and show the
distance from the probe Flange Plate to the bending mechanism Top Plate. This measurement
was used to adjust the position of the samples in the actual probe.
Probe instrumentation includes two liquid helium level sensors and a hall sensor. The liquid
helium sensors are both 35 inches long. One is placed with its end at the bottom of the cryostat
so that it will immediately register when the helium level begins to rise. This sensor also extends
above the samples to show when they are immersed in the helium bath. The second sensor
overlaps the first sensor in the region of the test samples and continues further up the probe.
Including two sensors in the test region provides a backup in case a problem occurs with one of
the sensors.
Liquid helium sensors use NbTi superconducting wire to determine the helium level. Provided
that the magnetic field intensity is low enough, the wire below the helium level is in a
superconducting state and the portion of the wire above the helium level is held in a normal
resistive state. The helium level can be measured from the resistance of the wire since only the
normal portion is resistive. As the helium level rises, the resistance of the sensor linearly goes
down. When the sensor is completely submerged it has zero resistance. Knowing the original
length and normal resistance of the sensor allows the helium level to be determined.
There are two types of helium level sensors. The four-wire sensors have a heater which keeps
the portion of the superconductor above the liquid helium level in a normal state. The two-wire
sensors use a significant amount of current (100 mA) to keep the upper portion normal.
Instrumentation wires used in liquid helium must be insulated with PTFE (Teflon) in order to
remain flexible. Other types of plastic insulation increase the risk of cracking and exposing the
wires at the 4.2K temperature.
118
A Hall sensor is mounted in the probe to confirm the direction of the magnetic field relative to
the test samples. It is important to make sure that the Lorentz force is in the correct direction so
that the test samples are supported by the Support Beam. Following convention, the magnetic
field should be directed from the floor to the ceiling. This is used to choose the direction of the
current through the sample.
This chapter has been focused on the most important design issues surrounding the bending
mechanism, test samples, and probe. Consequently, all of the components have been presented
as computer models in their designed form. The actual parts were fabricated from these models.
Drawings showing the particular dimensions of the components are included in Appendix C.
Pictures of the completed parts for the bending mechanism, test samples, and probe are presented
in Appendix D.
Chapter 4
Specifications and Test Results
The previous chapter discussed many of the important design issues that had to be considered for
the successful realization of a practical bending mechanism capable of performing strainbehavior characterization of Nb3Sn superconducting strand. This chapter presents specifics
about the design and operation of the actual mechanism. Issues concerning the measurement and
testing procedures are also covered. The testing results are discussed and followed by
recommendations for further work.
4.1 Mechanism Specifications
Recall that the accuracy of the bending mechanism depends on the ratio between the initial,
undeformed, length of the sample, L8, and the distance separating the rotation axes, L,, as
defined in figure 2.8 of section 2.5. This ratio has been designated by the nondimensional
parameterf For ideal pure bending, the lever arms should change length with rotation to
produce the appropriate displacement. But the practical bending mechanism uses a fixed lever
arm length with a constant value off chosen to minimize the amount of error over the range of
operation.
120
The bending mechanism was designed so that the lever arms (Torque Arms) and samples could
be easily exchanged. This also gives the device the flexibility for use in a variety of different
tests. Figure 4.1 a is a picture of the bending mechanism showing the removable Torque Arms
mounted on splines extending from the Torque Gears below. The completed gear train is
revealed in figure 4. lb when the Upper Plate is removed.
Input
Shaft
Torque
Arm
1V
(a)
121
Torque
Gear
jF,
Drive
Shaft
(b)
Fig. 4.1. Bending mechanism (a) with removable Torque Arms and (b) gear train.
For the characterization of the Nb3Sn strand, two different values off were chosen: 1.53 and
1.57. The valuef= 1.53 was selected because it was shown by the analysis in section 2.5 to have
the smallest bending error over the operating range. The corresponding Torque Arms are
stamped with "153" and are used for one set of the IGC samples and the OST (European) strand.
The value off= 1.57 is used with a second set of IGC samples and Torque Arms marked with
122
"157." This value was chosen for two reasons: first, it is the same ratio that was used in a
bending mechanism by previous researchers for characterizing high temperature superconductor
[4.1]. Second, the error analysis for this particular ratio showed that it had the largest average
bending error for lever arm rotations from zero to 900, but that at 90* the error suddenly drops to
zero. It was important to include a test with a controlled bending error because it provided a way
to quantify the effect that the displacement error had on the quality of the overall bending
distribution through the sample.
Using two Torque Arm lengths requires different samples and Support Beams. Detailed
drawings are provided in Appendix C. The distance between the Torque Gear pivot axes, Lp, is a
constant 2.9757 inches (75.58mm). Therefore, the free unclamped length of the Support Beam
and test samples, L., is 4.5528 inches (115.64mm) forf=1.53 and 4.6719 inches (118.67mm) for
f=1.57. Figure 4.2 shows an entire sample mounting assembly including the Support Beam,
Beam Clamps, Current Joints and leads, and samples for the OST (European) strand withf=1.53.
Fig. 4.2. Sample mounting assembly for OST (Eurpean) strand withf= 1.53.
123
The Beam Clamps on each end of the Support Beams are 0.700 inches (17.8mm) wide with bolt
holes drilled through the centers. Consequently, the alignment holes for the Support Beam are
spaced 5.258 inches (133.4mm) apart forf=1.53 and 5.372 inches (136.4mm) forf=1.57.
The test samples make a 900 bend (with a 0.125 inch radius of curvature) around the outside of
the Beam Clamps to achieve the longest possible Current Joint length. The portions of the strand
underneath and to the sides of the Beam Clamps are soldered into a groove on the copper Current
Joints. Figure 4.3 shows the configuration of the Current Joints on the Beam Clamp and the
mounting groove for the sample. The outer surface of the mounted sample is coincident with the
sides of the Beam Clamps, giving an overall outside strand dimension of 5.953 inches
(151.2mm) forf=1.53 and 6.072 inches (154.2mm) forf=1.57.
(b)
Fig. 4.3. (a) Current Joint mounting configuration, and (b) sample current-joint groove.
124
These dimensions for the bending mechanism components were driven by a combination of all
of the operating requirements. The primary design objective to achieve the longest sample
length possible in the limited magnet bore was followed closely by the strength requirements of
the gear train. The sample mounting assembly forf=1 .57 represents the longest configuration
that can be used in the mechanism without colliding with the Input Shaft or cryostat.
There are marks on some of the bending mechanism components to show the required
orientation for producing symmetric bending. These marks are used during assembly to ensure
that the parts are aligned correctly. The letter "A" is stamped on one Torque Arm and one
Torque Gear. This means that those components go on the "Actuator" side of the mechanism,
which is the side with the Input Shaft. The symbol "0" is stamped on the Torque Gears at the
base of a single gear tooth. This means that those teeth should be pointing towards each other in
the same worm thread on the Drive Shaft when the gear train is assembled. There are slashes,
near the splines of the Torque Gears and Torque Arms. The Torque Arms should be
positioned on the Torque Gears so that these slashes are aligned.
4.2 Support Beam Specifications
The groove for holding the sample in the Support Beam was not machined deep enough to place
the center of the sample coincident with the centerline of the beam. A groove 0.048 inches
(1.23mm) deep would have to be machined in the 0.065 inch (1.588mm) thick Support Beam to
have the center of the 0.03 2 inch (0.81mm) diameter strand lie at the centerline of the beam,
leaving only 0.017 inches (0.35mm) of wall material. This would have resulted in high stress
concentrations at that location, causing the Support Beam to fail. Recall from section 3.3.1, that
this size of Support Beam was the thickest that could be used in the bending mechanism based
on the maximum strain limit of the Ti6Al4V alloy.
125
The actual sample groove was machined to a depth of 0.036 inches (0.91mm), placing the center
of the 0.032 inch (0.81mm) diameter strand 0.012 inches (0.3mm) from the centerline of the
Support Beam. To compensate for the offset of the sample centerline, grooves on the opposite
side of the Support Beam were machined so that the geometrical neutral axis of the beam was
coincident with the sample center. The relative position of the strand centerline to the Support
Beam is illustrated in figure 4.4. A machined Support Beam showing the sample grooves,
current joint grooves, bolt holes, and compensating grooves is shown in figure 4.5.
Geometrical
Neutral Axis
IamleSupport
Sample
Beam
cross-section
Half-way between
Beam Surfaces
Fig. 4.4. Position of sample in Support Beam.
126
(a)
(b)
Fig. 4.5. (a) Sample side of the Support Beam, and (b) end of Support Beam showing
compensating grooves.
127
4.3 Strain Gages
Strain gages were placed along the length of the Support Beam to measure the bending
distribution. Each side of the Support Beam had gages mounted at the centerline and at the ends
near the Beam Clamps. The end gages were positioned a distance of 1.75 inches (44mm) from
the center of the Support Beam for thef=1.53 samples and 1.81 inches (46mm) for thef=1.57
samples. Because of the position of the strand and compensating grooves, the gages on the
sample side were at a different elevation than the corresponding gages on the opposite side. This
did not significantly affect the measurements because the bending deviations occurred along the
length of the beam, and not in the vertical direction.
The strain gages served as an independent check on the bending distribution in the beam. They
were not critical components because the rotations of the input shaft were the primary method
for setting the strain state of the mechanism. Instead, the strain gages were used to measure the
deviations from pure bending.
Each of the gages should, ideally, measure the same amount of strain if the beam is in pure
bending. When simply checking for a pure bending distribution, it is only important that the
gages are within an expected tolerance of each other. However, to compare the quality of the
bending distribution relative to the expected distribution from the rotations of the Input Shaft, the
strain gages needed to provide accurate values. This was a significant issue in the 4.2K liquid
helium bath with a 12T magnetic field.
The strain gages selected were series WK-13-125AD-350 from Vishay Micro-Measurements
Group. These gages have a nominal resistance of 3502 and an active gage length of 0.125
inches (3.18mm). The grid material is a nickel-chromium alloy used for more extreme test
environments with a uniaxial grid pattem. The gage backing material is a glass-fiber-reinforced
epoxy-phenolic that encapsulates the grid alloy.
128
It is important to control the amount of heat transfer from the strain gage to the liquid helium in
order to have a constant environment that will give consistent measurements. If there is too
much heat transfer, the helium can go into a nucleate boiling regime and affect the resistance of
the gage giving erroneous results. The WK series gage was selected because the epoxy
encapsulation over the grid material acts as an insulation barrier that helps to diffuse the
electrical heat generated before it reaches the helium on the surface. The 350 ohm rating of the
gage was chosen to limit the amount of power generation while still providing enough
sensitivity. It is also important that the excitation voltage for the gages be kept low enough to
not heat up the gages significantly.
Micro-Measurements supplies gages with a self-temperature-compensating property. The gages
can be chosen to have an approximate thermal coefficient of expansion that matches the test
material at the testing temperature. This self-temperature-compensation (STC) property changes
in a nonlinear fashion with temperature and so a material match at one temperature may not
apply at another temperature. The gages selected for measuring the Support Beam bending
distribution have an STC property that correlates to aluminum alloys near room temperature, but
changes to a value that closely matches the titanium alloy used for the beam at the 4.2K testing
temperature.
The Gage Factor (GF) of the strain gage changes with temperature. At room temperature the
purchased matched set of gages had a GF of 2.06. The included literature showed that the GF
changed linearly with temperature according to a temperature coefficient of GF equal to 1.0%/100'C. Dropping from room temperature at 24' C to the -269' C testing environment
meant that the appropriate GF for the strain gages was 2.93% greater, or equal to 2.12.
The adhesive selected to install the gages was Micro-Measurements M-Bond 610. This is a twocomponent epoxy-phenolic adhesive that must be cured at an elevated temperature. The
operating range of the adhesive allows it to be used reliably at 4.2K. At this temperature it has
an elongation limit of 1% which is lower than the intended 1.4% strain that the Support Beam
129
experiences. However, the gage itself has a recommended strain limit of 1.0% at -195' C
(-320'F) so the governing restriction was not the adhesive. After appropriately cleaning the
beam surfaces, the strain gages were applied using the M-Bond 610 adhesive which was then
cured at a temperature of 1770 C (350' F) for 1 hour.
An instrumentation box was designed and built to use for the strain gage measurements. This
box was capable of measuring up to 4 strain gage circuits simultaneously using parallel
Wheatstone bridge configurations. It had provisions for the bridge balancing and voltage outputs
for the data acquisition system. The strain gages could be connected in a double-bridge circuit or
a single-bridge by including a dummy resistor. The double-bridge was set up so that any noise
or temperature effects would be canceled out. This circuit utilized strain gages mounted on
opposite sides of the Support Beam with one in tension and the other in compression. This
resulted in an output with double the strain magnitude which eliminated the ability to observe the
strain levels on the individual faces of the beam.
4.4 Bending Mechanism Verification
It was important to test the operation of the bending mechanism before performing the
characterization tests on the Nb 3 Sn samples. The quality of the bending distribution in the
Support Beam was checked both at room temperature and in a liquid helium bath. These tests
showed that the mechanism would develop a bending distribution throughout the beam that
remained within 15% of the intended bending state.
The bending state for this experiment is defined as the maximum strain magnitude that occurs on
the outer surface of the test strand. It is not the strain state of the Support Beam. The IGC and
OST (European) Nb 3Sn internal-tin test samples have an outer copper stabilizer sheath
surrounding the inner portion with the superconducting filaments. Consequently, the defined
bending state refers to the strain at the surface of this copper layer rather than the bending state in
130
the filaments. This definition is consistent with other strain behavior characterizations because it
treats the technological strand as a single unit instead of trying to separate out the strain states of
the filaments. In reality, the strain state of the individual filaments is very complicated even in
uniaxial testing because of the different materials present and the twisting of the filaments.
For the bending tests, the defined strain state of the mechanism was controlled by the number of
rotations of the Input Shaft. The relationship between the strain state of the sample and the Input
Shaft rotations is derived as follows:
The magnitude of the desired strain state, c, is related to the test sample diameter, d, and the
radius of curvature, p, by a modification to equation 2.5, which is given by equation 4.1.
6 =- s
2p
(4.1)
The geometric relationship between the arc length of the sample, Ls, the radius of curvature, and
the subtended angle, a, was expressed as equation 2.7 and is restated as equation 4.2 for
convenience.
L, = po
(4.2)
For the bending mechanism, the angle of rotation for one of the Torque Arms, 0, is equal to twice
the angle of the bending arc, a, as described in section 2.4. Using this fact and combining
equations 4.1 and 4.2 yields equation 4.3, which shows the amount of rotation for the Torque
Arms to achieve the desired strain state in the strand.
0= C
d,
(4.3)
131
The rotation of the Torque Arms is controlled by the 36-tooth Torque Gears which are connected
to a 1-tooth worm. This worm is fixed to a 27-tooth wormgear on the Driveshaft which is fed by
the 1-tooth worm on the Input Shaft, making for a total gear ratio of 972 to 1 or n=972. Equation
4.4 gives the number of rotations of the bending mechanism Input Shaft that are required to place
the test strand in a desired bending strain state, where 27C is included to convert the angle to
rotations. Of course, the length dimensions must be in the same units.
Rotations of Input Shaft = n C
27d,
(4.4)
The maximum strain magnitude on the outer surface of the Support Beam is related to the strain
level of the test sample by equation 3.3, which has been modified in terms of the diameter of the
strand, ds, and the thickness of the beam, db, to produce equation 4.5.
Ebeam
=
Estrand
(4.5)
Tables 4.1 and 4.2 were generated with equations 4. lthrough 4.5 to show the number of Input
Shaft rotations for a range of strain states, along with other parameters, for the two different
length test samples corresponding to values off=1.53 andf-1.57, respectively. These tables
were used to set the strain states for all of the bending tests.
132
Table 4.1. Bending mechanism shaft rotation/strain state forf=-1.53.
Ratio,f
1.53
Sample Length (in)
4.55282
Strand Diameter (in)
0.03189
0.065
Radius of
Curvature
(inches)
00
Beam Thickness (in)
Strand
Strain
Beam
Strain
(%)
0
0.10
0.20
0.30
(in/in)
0.40
0.50
0.60
0.70
0.80
0.90
0
0.002038
0.004077
0.006115
0.008153
0.010191
0.012230
0.014268
0.016306
0.018344
15.95
7.97
5.32
3.99
3.19
2.66
2.28
1.99
1.77
Torque
Arm Angle
(deg)
0
8.18
16.36
24.54
32.72
40.90
49.08
57.26
65.44
73.62
Rotations
of Input
Shaft
0
22.09
44.17
66.26
88.34
110.43
132.51
154.60
176.69
198.77
Table 4.2. Bending mechanism shaft rotation/strain state forf=1 .57.
Ratio,f
Sample Length (in)
Strand Diameter (in)
Beam Thickness (in)
Strand
Strain
(%)
Beam
Strain
(in/in)
0
0.10
0.20
0.002038
0.30
0.40
0.50
0.60
0.70
0.80
0.90
0
0.004077
0.006115
0.008153
0.010191
0.012230
0.014268
0.016306
0.018344
1.57
4.67185
0.03189
0.065
Radius of
Torque
Rotations
Curvature
(inches)
00
Arm Angle
of Input
(deg)
0
Shaft
0
15.95
7.97
5.32
3.99
3.19
2.66
2.28
1.99
1.77
8.39
16.79
25.18
33.58
41.97
50.36
58.76
67.15
75.54
22.66
45.33
67.99
90.65
113.32
135.98
158.64
181.31
203.97
133
4.4.1 Room Temperature Verification
The room temperature bending verification test was done to visually check the operation of the
mechanism before attempting an enclosed liquid helium test. The bending mechanism was
attached to the end of the test probe and actuated using the hand crank. The test incrementally
went from the initial zero strain state to a maximum state of 0.8% bending strain. It was known
beforehand that this magnitude of strain state would result in plastic deformation of the Support
Beam due to the lower elastic strain limit of the titanium alloy at room temperature. So a beam
with a minimal amount of investment in machining was used for the testing. Figure 4.6 shows
the bending mechanism with the trial Support Beam at a sample strain state of 0.7%. This
corresponds to an arc-angle of 114.5 degrees with a surface strain on the beam of 1.43%, which
is greater than the 0.73% elastic strain limit at room temperature.
Fig. 4.6. Room temperature test of bending mechanism.
134
As the Input Shaft was rotated, the curvature of the trial Support Beam was periodically checked
with curved templates that had been previously machined. These showed the bending
distribution to be very close to the strain setting along the entire length of the beam. As the
bending continued to be applied, this quality of distribution degraded due to the inherent errors
of the bending mechanism and the fact the Support Beam was beyond its elastic limit and was
being plastically deforming. This plastic deformation served to relieve the strain in the center of
the Support Beam and reduced the overall curvature. This effect was significant as can be seen
by the permanent deformation of the beam shown in figure 4.7.
Fig. 4.7. Permanent deformation of Support Beam tested at room temperature.
At a sample strain state of 0.8%, the amount of torque required to adjust the bending mechanism
was measured. A torque of 2.5 ft-lb (3.39 N-m) was needed to apply any additional bending via
the Input Shaft, which was well within the design strength limits of the mechanism.
135
4.4.2 Liquid Helium Verification
The gears of the bending mechanism were coated with a Molybdenum Disulfide dry-film
lubricant before testing in the liquid helium bath. This replaced the grease that had been used for
the room temperature test.
A new Support Beam with all of the required machining was used for this test. It was important
to have both the sample grooves and adjustment grooves to check if the stress concentrations
would cause a beam failure. Strain gages were applied to the beam to measure the strain
distribution and test the probe wiring and data acquisition system.
Fig. 4.8. Probe and cryostat for the liquid helium bending mechanism verification test.
136
The test proceeded in a similar manner to the room temperature test with the Input Shaft being
successively rotated to the desired sample strain level. Two liquid helium level sensors in the
probe ensured that the Support Beam was immersed in a helium bath before proceeding with the
test. Figure 4.8 shows the probe in the cryostat with helium gas escaping and condensing the
atmospheric vapor.
Fig. 4.9. Support Beam tested in liquid helium bath.
As expected, the Support Beam was not plastically deformed when bent to the maximum strain
state as revealed by figure 4.9. However, several of the strain gages either broke, causing an
open circuit, or delarminated from the beam surface.
The liquid helium testing was very useful because it exposed several issues that needed to be
improved. Most important, the mounting of the strain gages was modified so that they would be
more likely to provide reliable data at the higher strain levels. The changes included mounting
and curing the strain gages on one side before applying the gages to the other side. This two-step
procedure was preferable to mounting all of the gages simultaneously because it allowed the
clamps holding the strain gages to be placed more securely. Other changes included adding
strain reliefs to the gages so that there would be less tension on the wiring during testing.
137
4.5 NHMFL Facilities
The various magnets at the National High Magnetic Field Laboratory for use by visiting
researchers are placed in separate rooms, or cells. The magnets are at the rear of their respective
cells and are surrounded by an elevated fiberglass deck that provides access to the magnet bore.
The front portion of the cell, in the low-field region near the entrance, is open for testing
equipment and instrumentation to be set up. Figure 4.10 shows a picture of Cell 4, which holds
the 20T 190mm bore magnet.
Fig. 4.10. Cell 4 at the National High Magnetic Field Laboratory.
138
The NHMFL also provides users with tools, instrumentation, and data acquisition systems upon
request. For the bending strain characterization tests, this included 8 Keithley model 2182A
digital voltmeters, a 1500A current power supply, and a computer running a NHMFL customprogrammed LabVIEW application with up to 20 channels of data sampling.
Fig. 4.11. Screen shot of testing control computer.
Figure 4.11 is a screen shot of the computer used to control the magnet and collect the
measurement data. The data acquisition program in this picture shows a plot of the voltage vs.
current measurement for one of the bending test samples. The window with "Cell 4" contains
the controls for the magnet. From this window the user can specify the magnetic field level and
has the ability to fully reverse the magnetic field direction. It also provides control for ramping
the magnet between two field levels at a specified rate.
139
There are limits to the magnets which are set by the physical characteristics of the magnet and
the power supplies. Each magnet has a maximum field level and ramp rate. To produce a 12T
field the 20MW 20T 190mm bore magnet requires 23.5kA, 11.74kA for 6T, and 0.097kA for
0.05T. At 12T the three coils in the magnet have voltages of 91.33V, 127.92V, and 56.16V.
A fault control system keeps the magnets from being damaged. This system measures key
parameters in the magnet including the coil currents, coil voltages, coil temperature. It also
monitors the water used to cool the resistive Bitter magnet by keeping track of the inlet
temperature and pressure and the outlet temperature and pressure. Anything that causes these
parameters to go outside of their tolerance limits will trip the system. When the fault system is
tripped control is automatically transferred from the user to the control room. The control room
then runs some tests to check the condition of the magnet before retuming control to the user.
The fault control system is particularly sensitive to fluctuations in the coil voltages. The user
tests must be insulated from the magnet so that a stray current from an extemal power supply
does not trip the system. A small amount of noise in the magnet power supply may also trip the
fault system.
Because the magnet power supplies are designed to provide constant current over a large range,
they have difficulty at the zero field setting. If left to dwell at this level for a small amount of
time, the power supplies will fluctuate enough to trip the fault control system. As a safety
precaution, the user must bring down the magnetic field intensity before making adjustments to
the test sample. To avoid tripping the system, the magnet can be set to a field level where it is
low enough for the user to make adjustments but high enough so that the power supply has low
voltage noise. For the 20T 190mm bore magnet this setting was a field intensity of 0.05T.
140
4.6 Sample Testing Preparation
The support system for the bending test is the probe. Figure 4.12 shows the completed probe set
up with the bending mechanism and ready for being placed in the magnet cryostat. Foam pieces
have been installed near the top Flange Plate to reduce the amount of heat transfer caused by the
convective flow of the helium gas.
Fig. 4.12. Bending test probe.
141
Before a test, the Sample Assembly is mounted to the bending mechanism on the end of the
probe. All of the necessary current leads and instrumentation wiring are then connected. The
Sample Assembly consists of the Support Beam, Beam Clamps, Current Joints with leads, and 3
separate bending samples. After attaching the Sample Assembly and bending mechanism to the
probe, all of the electrical connections were checked and then insulated with mylar tape.
Figure 4.13 shows the Sample Assembly and bending mechanism attached to the end of the
probe and ready for being inserted into the magnet cryostat. The GI 0 plate attached to the
bottom of the bending mechanism has a slightly larger diameter and was used to electrically
insulate the mechanism from the wall of the cryostat. One of the liquid helium level sensors can
be seen in the figure as the tube with the series of holes.
Fig. 4.13. Bending Mechanism and Sample Assembly attached to probe.
142
Figure 4.14 shows the routing path of the current lead wires. A portion of the current lead wires
had to be flexible to allow for the bending motion of the samples. An 8 AWG copper cable
made from 30 AWG strands was chosen for the lead wires to provide the most flexibility while
transporting the current. The original insulation for these wires was stripped off and replaced
with PTFE (Teflon) tubing. The lead wires were approximately 18 inches (45cm) long and were
bolted to solid copper blocks mounted on a GI0 plate.
Fig. 4.14. Flexible current lead wires.
Figure 4.15a shows the copper blocks on the probe that are used to attach the current lead wires.
Each block was drilled and soldered to a high purity copper insulated Westinghouse magnet wire
that passes through the GI0 plate and continued through a tube, extending outside of the probe.
These wires were used to supply current to the samples. Figure 4.15b shows these connection
points with the flexible current lead wires attached.
143
(a)
(b)
Fig. 4.15. (a) Attachment points for current lead wires, and (b) attached current lead wires.
144
After all of the testing preparations on the probe were completed, it was lifted by an overhead
crane and carefully lowered into the magnet cryostat. The current lead wires were then bolted to
2-gage welding cables. These cables extended to the sample power supply and provided a way
to select which sample was being tested without having to shut down the magnet. The other
instrumentation wires for the helium level sensors, Hall sensor, sample voltage taps, and strain
gages were then routed to the instrumentation table and connected to the data acquisition system.
jj:iikt
Fig. 4.16. Probe mounted on magnet cryostat.
145
Figure 4.16 shows the probe mounted on the magnet cryostat along with the hand crank used to
adjust the strain level of the samples. Because of the position of the hand crank in a region of
relatively high magnetic field, the magnet had to be shut down before the strain could be
adjusted.
Figure 4.17 is a picture of the magnet cryostat being filled with liquid helium through the probe.
The outer shell of the magnet cryostat had been filled with liquid nitrogen well in advance to
lower the temperature as much as possible before filling with liquid helium. The picture shows
the helium transfer line and the two 250 liter Dewars that were used to maintain the helium level
for the duration of the testing.
Fig. 4.17. Transferring liquid helium to the cryostat via the probe.
146
4.7 Sample Characterization
The bending mechanism and probe were created to measure the change in the critical current of
Nb3Sn strands with an applied bending strain. Critical current testing of superconducting strand
is done to determine the current value where the strand transitions from a superconductor back to
a normal resistive state under a specific set of conditions. The transition does not occur
instantaneously, but happens over a range of currents. Consequently, the critical current is
determined using a selected critical value electric field, Ec. The current that corresponds to this
amount of electric field in the test sample is the critical current, I.
A critical current test consists of measuring the voltage across two points of the sample as an
applied current is slowly increased. For the majority of the test, the current through the strand is
increased with no apparent increase in the measurement voltage. But as the current levels
approach the transition region of the superconductor, the voltage begins to increase. Depending
on the behavior of the test sample this voltage can appear suddenly and increase rapidly or it may
be a slow increase drawn out over a larger range of applied current. This behavior is a function
of the design of the test sample and the conditions that it is under. It is also related to the
distribution of the many superconducting filaments within the resistive bronze matrix that makes
up a technological Nb 3Sn strand.
The measured voltage is related back to the electric field criterion, E0 , by the test distance
between the sample voltage taps. The electric field is equal to the voltage divided by the
distance between the voltage taps. Therefore, a longer sample produces a larger voltage than a
short one for the same electric field level. This is important when significant noise may be
present in the measurement and E, is relatively low.
The ITER criterion for critical current testing is E,=O.1 V/cm. This is a level that is appropriate
for test samples that are 0.5 to 1.0 meters long. The standard ITER J barrel test uses a test
147
sample length of 0.5m. When testing shorter samples that are on the order of centimeters or
millimeters, it may be necessary to use a larger field criterion such as 1 .O V/cm or 2.0pV/cm.
Because of the relatively short length of the bending strain samples, an electric field criterion of
Ec=2.OpV/cm was used for determining the critical current. This value was chosen because it
has been used by other researchers, including Ekin, for strain characterization tests. The distance
between the voltage taps on the bending test samples are approximately 4.30 inches (11cm),
meaning that the critical current will be measured near a voltage of 22gV (2.20x104 V).
In addition to determining the I,, the characterization test can be used to derive the n-value of the
sample. The n-value is an exponential parameter relating the changing electric field, E, in the
sample to the changing current density, J. This relationship is shown by equation 4.6. This
expression could also be stated using voltage in place of electric field and current in place of
current density because they differ only by the constants of length and area, respectively.
-=
- J
(4.6)
The n-value describes the exponential transition of the strand from the superconducting state to
the normal state. A large n-value means that the transition occurred very quickly; the electric
field increased rapidly over a short current range. A small n-value signifies a slower transition
over a longer range of current. Generally, a large n-value also means that the strand has a higher
critical current.
When determining the n-value from a characterization test, the critical values are used for E (or
V,) and J, (or Ic). A second point is then chosen at an E (or V) and its corresponding J (or I)
either above or below the critical point. These values are combined to calculate the n-value from
equation 4.6.
148
Both the critical current, I, and the n-value of the test sample should change as the applied
bending strain varies. With uniaxial tension tests these values both increase up to an
approximate applied strain of about 0.3% before they decrease. These values tend to become
lower with subsequently applied strain cycles. It is anticipated that the bending test will exhibit a
similar behavior where the L and n-value increase up to some applied strain value and then
decrease.
4.8 Critical Current Results
Three separate test runs were scheduled for the bending strain characterization tests over a period
of three days. After preparing the probe with one of the three Sample Assemblies and filling the
cryostat with helium, the testing window for the magnet power supplies was approximately 7
hours. In that time the three strands in the Sample Assembly were tested over the entire bending
strain range. The probe was then removed from the cryostat and allowed to warm up to room
temperature before the Sample Assembly was exchanged the next day in preparation for the
evening tests.
The first samples to be tested were the IGC samples withf=1 .53 (IGC153). These were followed
by the IGC samples withf=1.57 (IGC 157) and then the OST (European) samples withf=1.53
(EU153). The testing on the first day was limited due to several problems that occurred. There
were problems with the liquid helium sensors in the probe and the power to the magnet was shut
down for extended periods. The tests were also limited by a combination of high sample noise
and the voltage taps on the samples breaking loose. Consequently, a consistent range of data was
not collected from any of the samples from the first day of testing. For the subsequent tests, the
voltage taps were reattached with allowances made for strain relief using 30 gage magnet wire
instead of the previous 22 gage wire.
149
The unexpected behavior of the samples at the lower strain levels on the first day helped with the
anticipation of this effect on the second day. At the lower strain levels, the samples either
quenched or transitioned at lower than expected current levels. It was possible that this was
caused by the loose mounting of the samples in the Support Beam grooves. The samples had
been carefully mounted so that they would not be damaged by handling. But this left them
unsupported and probably allowed them to shift as the Lorentz force increased during the
characterization testing. This low-current phenomenon occurred with all of the samples,
including those that appeared to be mounted securely in their support grooves previous to testing.
This low critical current behavior continued with the additional application of bending strain. At
the higher bending strains the test samples were able to settle into the Support Beam grooves.
But this did not change the low current trend in the measurements. However, as expected, the
critical current increased up to a point before it began to decrease.
Some of the sample measurements had large amounts of noise, which limited the useful data that
was collected. When this occurred, the sample was retested in an attempt to collect better data.
In some of the cases, the noise in subsequent tests was low enough to provide acceptable
measurements, but in most cases the noise remained. The most extreme noise appeared in the
measurements around the same time each evening and remained until the magnet time was over.
Unfortunately, this time consistently corresponded to the lower strain measurements where the
strand had first been loaded and then unloaded.
To provide a sense of the amount of noise encountered, figure 4.18 shows voltage-current
measurement plots for IGC 157, Samplel. Figure 4.18a is for a strain state of 0.2% after being
unloaded from the maximum strain. In this plot, the transition region is clearly visible before the
sample quenches. Figure 4.18b is the same sample measured 15 minutes later at a strain state of
0.1%. It is clear from the figure that the noise is too significant to provide any useful
information. Much effort went into trying to determine the source of the noise with no success.
150
1GC157 Sample #1, 0.2% Strain
1.OE-04
8.OE-05
6.OE-05
4.OE-05
2.OE-05
0
-
,
w% nA
0.OE+00
-2.0E-05
-4.OE-05
-6.OE-05
-8.OE-05
-1.OE-04
i
0
2
20
4
40
-T
60
-
8r
1
12
80
100
120
140
-
140
Current (A)
(a)
IGC 157 Sample #1, 0.1% Strain
1.OE-04 8.OE-05 6.OE-05
4.OE-05
2.OE-05 -
0.OE+00
0
>
-2.OE-05
-4.OE-05 -6.OE-05 -8.OE-05 -1.OE-04
0
20
40
60
80
100
120
140
Current (A)
(b)
Fig. 4.18. Voltage-current plots for IGC157 Sample #1 (a) 0.2% strain, and (b) 0.1% strain.
151
The voltage-current plots for the three IGC 157 samples were measured initially with no bending
strain applied. The bending strain was then increased to a sample strain of 0.1% and voltagecurrent data was again collected for the three samples. This continued in 0.1% strain increments
up to a maximum strain of 0.7% at which point, the strain was released in the same incremental
steps with measurements being taken at each step.
The testing of the EU 153 samples occurred in a similar pattern with the strain increasing in
0.1% incremental steps up to 0.7% before it was reduced. At the initial zero bending strain level,
each of the EU 153 samples quenched before transitioning to the critical electric field criterion of
E,=2.0[tV/cm. This quenching continued for each of the samples up to an applied bending strain
of 0.4%. After this point the samples did not quench as early and critical current data was able to
be collected.
Figures 4.19 through 4.24 are plots of the critical current data and n-values for the IGC 157 and
EUl 53 samples tested. The samples were numbered according to their positions on the Support
Beam: Sample #1 was positioned at the top with #2 in the middle and #3 at the bottom. Any
gaps in the plots are because the data was not available. IGC 157 Sample #3 has a limited set of
data because a voltage tap broke off when it was loaded to a bending strain of 0.3%.
The data points are connected by lines to clarify successive data points and there are separate
lines which designate loading or unloading of the sample. Loading refers to the applied strain
being increased from an initial strain value of 0%. Unloading is the release of the strain from the
maximum value of 0.7% and returning to the zero state.
All of the testing was performed at the liquid helium temperature of 4.2K. The IGC157 samples
were measured in a background magnetic field of 12T, while the EUl 53 samples had an applied
field of 13T. The larger magnetic field for the EU153 samples was selected to reduce the
amount of current in the lead wires. The lead wires had been designed to sustain a maximum
152
current of 200A and it was possible that the EU strand would have a critical current above this
value at the lower field 12T field.
At the initial low strains, the EU 153 samples quenched before reaching the critical electric field
criterion. Thus, the data is presented as the quench values. These same samples did show a
transition at the lower strain levels when the sample was unloaded.
The n-value data is presented in terms of two different definitions shown as nI and n2. Both nI
and n2 data was calculated using equation 4.6 with the critical electric field criterion of
Ec=2.OgV/cm and the corresponding critical current, I. The lines designated by n1 were
calculated using equation 4.6 and a second electric field value of E=3.5[tV/cm with its
corresponding current. The lines designated by n2 used a second electric field value of
E=7.1 IV/cm. The reason for presenting two separate n-values is because many of the samples
would quench soon after they had reached the critical electric field criterion and measurement
data was not available for the preferred n2 points. Consequently, the n1 points were calculated
using a lower secondary electric field point that was available for most of the test samples. But
even some of samples quenched before reaching the lower electric field level of ni, leaving gaps
in the data plots. It is interesting that the values of ni and n2 are very similar for most of the
strain states in a given sample.
These plots are a brief summary of the data that was collected. More of the test data information
is presented in the tables included in Appendix F. As a reference, critical current measurements
have been made for the IGC and OST strands using the standard ITER Jc barrel test. For the
condition of zero applied strain and a 12T magnetic field, the critical current of the IGC strand
has been measured at I = 144A, with an n-value of n = 33 [3.10]. The critical current of the
OST (EU) strand was recently measured at Ic = 247A under a zero applied strain and a 13T
magnetic field [3.2]. The critical electric field for these measurements used the ITER standard of
Ec = 0.1pV/cm.
153
Ic, IGC157 Sample #1
------- --- --- --
140- --
120 - ---------- ----------- ----- -----100 --- 8- - -L--
z
.2
80 - ------60 - -
6
------
----------------
s
------------- ------- ----
-a-Unloading
-----------------------------
40
U----
Loading
-----------------------
20
0
0. 0
0.2
0.4
0.6
0.8
Appied Strain (%)
(a)
n-values, IGC157 Sample #1
---------- ----- ---------------16.0------ ----- ------------- -----
G)
C
14.0
--- -12.0 -1-------0-----------------------6
----10.0 ------- -- -----------8.0 ------- - -----------6.0 - -4.0- ----------------------------- ----------- ------- ---------2.0
0.0
0.8
0. 0
0.6
0.4
0.2
Applied Strain (%)
(b)
Fig. 4.19. (a) Current data, and (b) n-values for IC 157 Sample #1.
a-e-n1
n Loading
-w--n2 Loading
-x
n1 Unloading
n2 Unloading
154
Ic, IGC157 Sample #2
140
-
120 - -- - -
-
-------------------------
--
----- - -------- ---- - - --80 - - ------------------ -------60 - ---- - - - ---------- - -- - ---------------- -----40 - --
100 -
- ---- --------
20 -0 - -- ---
iaUnloading
d-g
---
-- ---
_e-Loading
0 0.0
0.2
0.4
0.6
0.8
Applied Strain (%)
(a)
n-values, IGC157 Sample #2
0
20.0
18.0
16.0
14.0
12.0
10.0
8.0
6.0
4.0
2.0
0.0
-
-- - - - - - ----- - - - - ---------- - - - --------------- - - ------------------------ ----------- - - - - - - --------
- -- -------------------------- ---- -- --- - -- -- - - --- - --- - -----~~------ -- - -------- ----- ----- ---------- -- - ---------------------------i
.
0 .0
0.2
0.4
0.6
0.8
Applied Strain (%)
(b)
Fig. 4.20. (a) Current data, and (b) n-values for IGC 157 Sample #2.
-e-i-a-
n1 Loading
n2 Loading
n1 Unloading
_* n2 Unloading
155
Ic, IGC157 Sample #3
-------------------
140
-------- ------- --- ------ --- --- --------------------- -------- --------------- ---- ------- ---------- -------- ----
120 ---------100
80
.2
60
40
20
e+Loading
0
0.0
0.4
0.2
0.8
0.6
Applied Strain (%)
(a)
n-values, IGC157 Sample #3
14.0
--------
12.0
------
L--a--d-i-n-----
--- ----------- ------------- ------------------------- ------------------------
10.0
0
0----------Lod
8.0
6.0
o n1 Loading
__3-n2 Loading
4.0
2.0
0.0
0.0
0.2
0.6
0.4
0.8
Applied Strain (%)
(b)
Fig. 4.21. (a) Current data, and (b) n-values for IGC 157 Sample #3.
156
Ic Data, EU153 Sample #1
160
140
-
--- --- ----- ---- ------ -- -- -- -- -- ---------- 120 ------ --------- - -- ---- --100 ----------------------------C.,
-
80 60:
40 - --------- - - -------------------- 20 - ------ ---------- --- ---------------00
0.2
0.4
0.6
0.8
0
Quench
-*-
Loading
-*- Unloading
Applied Strain (%)
(a)
C)
12.0
-
10.0
-
n-values, EU153 Sample #1
-- ---- --- -- - - --- -----
8.0 - ------ ------------------------6.0
e.-n1
Unloading
ia n2 Unloading
4.02.00.00
0.2
0.4
0.6
0.8
Applied Strain (%)
(b)
Fig. 4.22. (a) Current data, and (b) n-values for EU 153 Sample #1.
157
Ic Data, EU153 Sample #2
160 - ----140 - - - -
----- ------- -------- ------ - - - ---- ---- - - - - -- --
120 --- - -- ------- -- ---- -- - -100
----------- ---- ----- ---- -----80 - ------------------------------- ---60 - - - -------- --- - --------- -- 40 -
Quench
-s- Loading
-&-
Unloading
-- -----
-- -------
- ---
-----------
--
20 -
0 0.2
0
0.6
0.4
0.8
Applied Strain (%)
(a)
n-values, EU153 Sample #2
12.0
-
--- -
10.0-
----
---- ------
- ------------
---
-----------
---
----------
~~-
-----------------------
8.0-
-- ------
'E 6.0 -------------------------------------
- -
4.0
--.-
- - - ---
- - -- - - 2.0 ------ -- --------- ----------------|0.00
0.2
0.4
0.6
-o-nl Loading
0.8
Applied Strain (%)
(b)
Fig. 4.23. (a) Current data, and (b) n-values for EU 153 Sample #2.
n2 Loading
-- n1 Unloading
-x -n2 Unloading
158
1c, EU153 Sample #3
U
----- - -- 160 - -- - - -- -- - -- - -- --------- - - --140 120 - --------- - -- -- - - -- -- - - 100 -~~~~-------------- --- - 80 ------ -- ---- --- -- -- 60 - - - ---- - -- --------------40 20 -
Quench
--
i
--
Loading
Unloading
00
0.6
0.4
0.2
0.8
Applied Strain (%)
(a)
n-values, EU153 Sample #3
.a)
12.0
-
10.0
-
8.0
-
------
----- - -------------- --
--- - - --
--------
-
- - --
--
----- --- --- -- ---------- -------
6.0
- -- - - - - - - -
4.0
- - - - - --
---
2.00.00
0.2
0.4
0.6
0.8
Applied Strain (%)
(b)
Fig. 4.24. (a) Current data, and (b) n-values for EU 153 Sample #3.
-4-n1 Loading
-s-- n2 Loading
-- n1 Unloading
---
n2 Unloading
159
The critical current plots for the first two IGC 157 samples show that the unloading traces
closely follow the loading traces. The largest discrepancy is a 23% current reduction that was
measured in Sample #2 at an applied bending strain of 0.4%, but a majority of the points are
within 10% of each other showing good reversibility.
The n-values in IGC 157 Sample #1 generally remain similar between strain loading and
unloading. A drop of approximately 50% occurs when the sample was returned to a strain level
of 0.1%. The voltage-current measurement for this point had a high amount of noise and it is
probable that the data was somewhat offset.
The n-values for IGC 157 Sample #2 show a more consistent degradation on the unloading path.
And the correlation between the two different ni and n2 values calculated is very good.
The quench current levels for the EU 153 samples at the lower applied strain seem to connect
well with the loading critical current data. The general shape of these curves is similar to the
IGC 157 loading plots. Unloading data of the EU 153 samples show a significant degradation in
the critical current levels. The largest discrepancy for the samples was a 56% reduction
measured in Sample #1 at a bending strain of 0.4%.
The n-values for the EU 153 samples confirm the performance degradation in the strand.
Although the data was not available for loading the strand at the lower strain levels, it seems that
the n-values are initially high and significantly drop by an applied strain of 0.7%. The lowest nvalue generally holds for all strain levels as the sample is unloaded back to a zero strain.
One of the most interesting aspects of the plots is the rise-drop-rise in the critical current for both
the IGC157 and EU153 samples. The drop point is generally at an applied strain of 0.3% for the
IGC157 samples and 0.2% for the EU153 samples. This critical current drop behavior occurs in
the IGCi 57 samples for both loading and unloading. But it is not observed on the unloading
path of the EUl 53 samples because of the severe critical current reduction.
160
It is apparent from both the Ic and n-value plots that the EUI 53 samples suffered more
irreversible degradation than the IC157 samples.
4.9 Bending Results
The quality of the bending distribution created by the bending mechanism is just as significant as
the critical current measurements. This is because the test was intended to characterize the pure
bending strain behavior of the samples. If the mechanism does not load the samples in a uniform
distribution of bending strain, then the intended characterization is not valid.
Strain gage data was collected by the data acquisition system during all of the test runs. This
recorded strain data for the bending distribution in the beam both with and without the Lorentz
force. Thus, allowing the effect of the Lorentz force to be plotted.
On the first day of testing with the IGC153 samples, the strain gages were connected in a singlebridge circuit. This was done to try and collect strain data on both the compression and tension
sides of the Support Beam as the bending load was applied. This data could then be used to
determine the dynamic location of the neutral axis relative to the center of the test sample.
Unfortunately, the measurements of the strain values drifted significantly. Each of the
measurements drifted the same amount, and it did not matter whether the corresponding gage
was mounted on the tension side or compression side of the Support Beam. It appeared as
though the Support Beam was expanding or contracting with temperature changes. The
measurement drift would go in one direction for a period of time and then suddenly reverse and
begin drifting in the other direction.
161
It was soon realized that the drift was being caused by the rise and fall of the liquid helium level
in the cryostat. The resistance of the instrumentation wires connected to the strain gages would
lower as the liquid helium level increased and rise as the helium level went down. The
measurement circuit showed this resistance fluctuation as being a change in strain. The solution
was to connect the strain gages in a double-bridge configuration where this effect was canceled
out. However, this eliminated the possibility of collecting data related to the position of the
neutral axis.
The double-bridge measurement circuit used strain gages mounted on opposite sides of the
Support Beam with one on the tension side and the other on the compression side. The
relationship for calculating the amount of strain from a double-bridge compensating Wheatstone
strain gage circuit is given by equation 4.7 [4.2]. In this equation c is the measured strain and GF
is the gage factor of the strain gages at the measurement temperature, which is equal to 2.12 at
4.2K for the gages used. The term VE is the excitation voltage of the Wheatstone bridge and 6V
is the measurement voltage. For a double-bridge circuit in a temperature-compensating
configuration, the bridge constant,
K,
is equal to 2.
9V
VE
1CeGF(47=
K
--
(4.7)
4
Using equation 4.7 to solve for the measured strain, F, gives the average strain at the beam
surfaces. This value must be divided by 2.038 to get the relevant strain in the strand, according
to the strain relationship between the beam and the strand given by equation 4.5.
Strain measurements were made for both the IGC157 and EU153 sample test runs. Recall from
section 4.1 that the IGC157 configuration was based on a bending ratio off-1.57 which the
analysis in section 2.5 showed would create more bending error than thef=1.53 ratio used in the
EUJ 53 setup. This was verified by the collected data presented in figures 4.25 through 4.27.
162
The strain data did not change significantly between the different samples in the same Sample
Assembly. The figures are measurements based on Samples #2 from IGC157 and EU153.
IGC157, Measured Bending Strain
--------- ---- -- --- ---0.007 ------- -------0.006- -- -- ----------0.005- - --- ------- - ----- --- --------- ------------0.004 ---------------------------------0.003 -------------- ----------------------------------0.002 - - - -------- ------ - - -0.001 - -- - ---- - -------0. 000 1 --- --- - ---
S
C
'a.
-0. 001j I
0
0.006
0.002
0.004
Applied Bending Strain (in/in)
-e--Center
-Pos End
-aNeg End
0.008
(a)
EU153, Measured Bending Strain
C
C
C
U)
0
(U
(U
0
0.007 - -------------------------------- -------- 0.006- --- ---- - - - -------------0.005 0.004 ------------------ - ----------0.003 ------------- - ------------- - 0.002 ---------- - --------------------0.001 - --- - ---------- ------- ---- 0. 000 1 -- -----------------------------
-e-Center
-*-Pos End
-*-Neg End
-0.001
0
0.002
0.004
0.006
0.008
Applied Bending Strain (in/in)
(b)
Fig. 4.25. Measured bending strain for (a) IGC157, and (b) EU153 beams.
163
Figure 4.25 shows a plot of the measured bending strain as a function of the applied bending
strain for the IGC 157 and EU153 Support Beams. The line labeled "Center" is the strain
measurement for the gages mounted in the center of the Support Beam. The "Pos End" and
"Neg End" traces are for the strain gages mounted near the positive end of the Support Beam
where the power supply current was applied at the Current Joints and the negative end which was
the electrical ground. For the IGC157 Support Beam, the end gages were placed 1.81 inches
(46mm) inches from the beam center. The EUl53 Support Beam had end gages positioned 1.75
inches (44mm) from the beam center. Incidentally, these end gages are positioned inside the
length region measured by the voltage taps.
The lines show the data for incrementally increasing the applied bending strain up to 0.7%
(0.007 in/in) and then unloading. Ideally, the strain plots should trace the same path on loading
and unloading. Looking at the center strain gage plots for both IGC157 and EU153, it is clear
that center gages did not produce the same output on the unloading path. This is because the
center gage on the tension side of IGC 157 delaminated at a loading strain of 0.6% (0.006 in/in)
and the same gage on EU153 came loose just before reaching an applied bending load of 0.7%
(0.007 in/in). This is understandable since the strain at the surface of the beams was
approximately 1.2% and the strain gages were limited to 1.0%.
Fortunately, the gages simply delaminated from the surface and did not break. This meant that
they were still part of the double-bridge circuit and data could continue to be collected.
However, there was a shift in the strain measurement because the bridge had been balanced with
the gage attached to the titanium Support Beam. When the gage delaminated, the strain caused
by the difference in the thermal coefficient of expansion of the gage and the beam was released
and caused a shift in the measured data. This shift is shown in the data traces for both the
IGC157 and EU153 center gage plots. In addition, the tension-side strain gage on the positive
end of EU153 broke loose causing an open circuit. This data discontinues at a strain of 0.5%.
164
The figures show that both IGC 157 and EUI 53 have a very good bending distribution. The end
gages exactly trace the same path on loading and unloading, showing that there was no plastic
deformation. If the center gages had not broken loose, the measured center strains for both
IGC157 and EU153 would have been slightly greater at an applied strain of 0.7% (0.007 in/in).
IGC157, Bending Strain Error
0.0002
0.00001
0
tw
C
-0.0002
-0.0004-0.0006-0.0008-0.0010-0.0012
-0.0014-
-------------- --- --- ------- -- ----- - - ---- --------- --- -- - -- ------ - --------- ----------------------------- --- --------------------- ------------------------- ---------------- --- - ----- - -- ----- ------- -
0.002
0.004
0.006
-.--
Center
-g-Pos End
-&-Neg End
0.008
Applied Bending Strain (inlin)
(a)
EU153, Bending Strain Error
I-
0
I-
C
U,
0.0002
0.0000
-0.0002
-0.0004
-0.0006
-0.0008
-0.0010
-0.0012
-0.0014
- ---- -- ------ ---- -- -- -- - ---- --- --------- - - -- --- - -- -------- --- ---- ---- ------ -- -------- --- -------------- -----------
---- ----------- -- -----
0
0.002
0.004
0.006
0.008
Applied Bending Strain (in/in)
(b)
Fig. 4.26. Bending strain error for (a) IGC157, and (b) EU153 beams.
+ Center
-*- Pos End
,- Neg End
165
The magnitude of the errors of the measured bending strain relative to ideal pure bending are
shown in figure 4.26. These plots trace the amount of strain either below or above the intended
strain setting. For example, the strain error shown in figure 4.26a is approximately -0.0013 on
the positive end of the IGC157 beam at an applied strain of 0.007 in/in. This means that the
measured strain was 0.0013 below the intended strain of 0.007, or 0.0057 in/in. This is a drop of
18.5% below the ideal value.
The plots for the center gages again show the obvious shift near an applied strain of 0.6% (0.006
in/in) where the gages delaminated. Otherwise, these traces would have returned back along the
same loading path, similar to the end gages.
Up to the point of the gage delaminating, the bending strain error plot for the center gage of
EUl 53 confirms that this configuration has the lowest bending error. It is almost perfect up to an
intended ideal strain of 0.6% (0.006 in/in). On the other hand, the IGC157 plot for the center
gage shows the increased divergence with continued applied strain. This was expected from the
bending mechanism error analysis.
The configurations for the IGC157 and EU153 Support Beams are not very different. The
separation distance for the pivot axes of these beams is the same at 2.9757 inches (75.583mm),
but the ratiof=1.57 has a sample length of 4.67185 inches and the ratiof=1.53 has a 4.55282
long sample. This is only a difference in length of 0.119 inches (3mm).
It is interesting that the strain error levels on the end gages are almost identical for both IGC 157
and EU153. It was known that the positive and negative end gages should trace the same path
due to their symmetric placement about the beam centerline, but it was not clear how the two
different configurations would compare in the end regions. These traces are approximately
linear and maintain an error near 19% below the intended ideal strain over the entire operating
range.
166
IGC157, Strain Change from Lorentz Load
--- - - - -- - -- -0.00020 ----
-)
0.00015
0.00010
0.00005
0.00000
-0.00005
-0.00010
-0.00015
-0.00020
-- -
--- ------ -- ------ - ----
-- -
- -------- ----------- ------- - ------ -----------0
0.002
0.004
0.006
-o-
Center
-m-
Pos End
---
Neg End
0.008
Applied Bending Strain (in/in)
(a)
0.00020
0.00015
0.00010
0.00005
0.00000
-0.00005
-)
C
-0.00010
-0.00015
-0.00020
EU153, Strain Change from Lorentz Load
------- - -- ----- - ------- - --- --- - - - - - - -- --- --- -C----------t--rS0---------------------------E
_-oCenter
---------------- ---a ------ ---* -Pos End
-- -- - ----- -------------------* Neg End
- - - - - -- - -- ---- -- --- ------ - -- - -- - -0
0.002
0.004
0.006
0.008
Applied Bending Strain (in/in)
(b)
Fig. 4.27. Effect of Lorentz load on bending strain for (a) IGC157, and (b) EU153 beams.
167
The effect of the Lorentz load on the bending distribution is shown in figure 4.27. These plots
demonstrate the amount of change in the measured bending strain caused by the Lorentz force at
the maximum current in the test sample. These traces do not show the deviation from ideal
bending; rather they are the effect on the measured strain. The plots were generated by
subtracting the measured beam strain with no Lorentz force from the measured beam strain at
full sample current and maximum Lorentz load.
The effect of the Lorentz force on the bending distribution in the beam becomes less significant
as the applied bending state increases. This is because the contribution of the Lorentz force
becomes a smaller portion of the total bending strain in the beam. At high bending states the
large majority of the strain comes from the bending mechanism. But at low strain states, the
bending mechanism is applying little or no load and so the Lorentz load is the dominant force.
At this state only the bending stiffhess of the Support Beam is left to resist the distributed force.
The error plots for the center gages show that the Lorentz force tends to lower the strain in the
center of the beam. This was expected since the Support Beams were bent so that the test
samples were on the outer curved surface of the beam. The Lorentz force was then directed
inwards to hold the samples in the groove. This tended to flatten out the beam and lower the
strain in the middle. But because the ends are fixed, the strain near the ends was increased with
this flattening effect, as verified by the end gage plots.
4.10 Sample Strain
The collected strain data shows that the bending mechanism produced a very good bending strain
distribution in both the IGC 157 and EU153 Support Beams. However, this does not mean that
the samples themselves were in a state of uniform bending.
168
After testing, the sample Support Assembly was removed from the probe and the samples were
examined. The samples appeared to have been placed in tension during the testing because they
were outside of their mounting grooves. Figure 4.28 shows the Support Assembly for EU153
before and after testing. Even though some of the samples were loose in the grooves before
testing, all of the samples had been plastically deformed during testing.
Samples
(a)
(b)
Fig. 4.28. EUl 53 test samples (a) before testing, and (b) after testing.
169
Some plastic deformation was expected because of the high strain level of the bending
mechanism and the low elastic limit of the copper portion of the superconducting strand. Several
measurements were taken of the samples shown in figure 4.28 to try and estimate the amount of
deformation. Assuming that the samples had initially been in the groove and were bent into an
arc, the average measurement corresponded to an elongation of approximately 0.005 inches
(0.001mm) or 0.1% strain. This is the value for the plastic deformation rather than the applied
strain. To achieve this amount of deformation, the strand had to experience strain beyond its
elastic limit. This value is an upper bound on the plastic deformation because each of the strands
did not start out settled in the grooves, as the picture in 4.28a confirms.
Aside from the bending strain applied by the mechanism, there are two sources that would have
placed the sample in tension. The first source is the difference in the thermal coefficient of
expansion between the Nb3Sn strand and the titanium alloy Support Beam. The second source of
tension could have come from the offset between the center of the strand and the center of the
beam as described in section 4.2. These two effects will be estimated to determine how much
influence they might have had on the strand bending.
The thermal expansion of the strand, as a single unit, from room temperature to 4.2K is -0.27%,
and -0.15% for the Ti6Al4V Support Beam. Since both of these components start out with the
same length, the tensile strain in the strand from thermal contraction is 0.12% which is rather
significant compared to the applied bending strain levels. Note that this strain level is for the
strand as a whole and not for the intrinsic strain of the Nb 3Sn filaments.
The effect of the strand offset relative to the centerline of the Support Beam will be estimated
with an upper bound argument. Referring to section 4.2, the centerline of the strand was offset
from the centerline of the Support Beam by 0.012 inches (0.3mm). To compensate for this
offset, the beam was machined so that the geometric neutral axis would be coincident with the
strand centerline. The Support Beam and strand were then assembled and placed in the bending
mechanism.
170
The Support Beam was accurately positioned in the bending mechanism so that its centerline was
coincident with the pivot axes of the Torque Arms. It is likely that under bending operation of
the mechanism the rotation of the Torque Arms forced the neutral axis of the Support Beam to
dynamically shift to the centerline of the beam. Consequently, the neutral axis was no longer
coincident with the strand centerline.
Assuming that the neutral axis was shifted to this new position in the Support Beam, an estimate
can be made about the strain state of the strand when a bending load is applied. The
development will follow the procedures and definitions used in section 4.4.
Figure 4.29 is an exaggerated diagram of the beam and strand. The dashed line represents the
shifted neutral axis of the beam and the phantom line is the centerline of the strand. Since the
beam is in a state of bending it has a radius of curvature, p. The strand is offset from the neutral
axis by an amount, 6. Since the neutral axis position of the beam is not elongated during pure
bending, it has a constant length which is equal to the initial, undeformed, length of the strand,
L. The angle subtended by this arc is a.
Strand
Centerline.-
~-
S
P
Beam neutral
axis
Fig. 4.29. Offset between beam neutral axis and strand centerline.
171
At a chosen bending strain state, a, the radius of curvature of the beam can be found from
equation 4.1 with the subtended arc, a, being equal to twice the value of equation 4.3. The radius
of curvature for the strand is equal to the radius of curvature of the beam and the offset of the
strand, as given by equation 4.8.
(4.8)
P,trand = p +8
The length of the strand after the beam has been placed in a state of pure bending is found by
combining equation 4.8 with 4.2, which yields equation 4.9.
Lt,,tr
= p(0+
p 8x
(4.9)
Making the substitutions for p and a described above into equation 4.9 produces equation 4.10.
This expression gives the new length of the strand, Lstrand, in terms of its original undeformed
length, Ls, its diameter, ds, and the intended bending strain level, a.
(4.10)
=~a
=L
± +J
Lt
The tensile strain in the strand caused by the offset is then given by equation 4.11.
ET =
(4.11)
Ltran
L,
Substituting 4.10 into 4.11 and simplifying shows that the tensile strain is independent of the
original length of the strand as shown by equation 4.12.
CT
= _ +
2c
-. -d,
-1
(4.12)
172
Representative values, given in table 4.3, were substituted into equation 4.12 to calculate the
amount of tensile strain in the strand caused at different levels of applied bending strain.
Table 4.3. Tensile strain in an offset strand with applied bending strain.
5
0.012
(inches)
d, (inches)
0.03189
Bending
Strain, ,
0
0.001
0
0.00075
0.002
0.003
0.004
0.005
0.006
0.007
0.00151
0.00226
0.00301
0.00376
0.00452
0.00527
ST
The offset of the strand also causes its bending state to be modified by a small amount. The
offset of the strand centerline from the beam neutral axis means that it has a new radius of
curvature given by equation 4.8. This radius of curvature can be combined with equation 4.1 to
find the bending strain state of the offset strand. It is important to realize that equation 4.1 is true
in general and so care must be taken not to confuse the different strains in the definitions being
used. The new bending strain in the strand,
SB,
caused by the offset in the beam neutral axis is
given by equation 4.13.
6B
=
d(4.13)
d, + 29c
173
It should be clear from equation 4.13 that when 6 is small the bending strain in the offset strand,
-B,
is very nearly equal to the bending strain in the ideal strand, F. As proof, table 4.4 was
generated using equation 4.13 and the present parameters.
Table 4.4. Bending strain in an offset strand.
5
(inches)
d, (inches)
Bending
Strain, aB
6
0
0.012
0.03189
0
0.001
0.00100
0.002
0.003
0.004
0.005
0.006
0.007
0.00200
0.00299
0.00399
0.00498
0.00597
0.00696
The final strain state of the offset strand can be found by combining the tensile strain from the
temperature expansion coefficient mismatch, the tensile strain from the offset of the strand, and
the corrected bending strain. The bending strain is not really a single strain in the same sense as
the tensile strains. Rather, it is a linear distribution of strain through the sample that is tension on
one side and compression on the other. The tensile strains must be added to the bending strains
keeping this in mind. Figure 4.30 conceptually illustrates how to add these strains together.
174
6B
St
ET
SB-new
Fig. 4.30. Conceptual method for adding tensile strains to bending strain.
To add tensile strains to a bending strain, the tensile portion of the bending strain is added
directly to the other tensile strains to get the new tensile portion. The magnitude of the
compression portion of the bending strain is subtracted from the combined additional tensile
strains. If the magnitude of the compressive term is larger than the other tensile strains, then the
new bending strain will have a reduced compression portion. But if the other tensile terms
combine to be larger than the magnitude of the original bending compression, then the new strain
is in tension and the local neutral axis has moved off of the strand.
The strain state of the offset strand was calculated using the procedure outlined above and is
given in table 4.5. A temperature-induced tensile strain of 0.0012 (0.12%) was combined with
the offset tensile strains in table 4.3 and the refined bending states of table 4.4. Because the
bending distribution is no longer uniform through the strand, it has been given in terms of the
tensile strain on the first surface, &1, and the corresponding compressive strain on the opposite
surface, 82.
175
Table 4.5. Strain distribution in offset strand.
8
(inches)
ds (inches)
t (in/in)
0.012
0.03189
0.0012
Bending
Strain, c
s1
0
0.00120
0.00120
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.00295
0.00471
0.00645
0.00820
0.00994
0.01169
0.01343
0.00095
0.00071
0.00047
0.00022
-0.00002
-0.00025
-0.00049
62
The strains in table 4.5 show that the ideal offset sample is mostly in a state of tension. Only at
the larger applied bending strains does the strand have a surface with compression.
The calculations were based on an idealized situation where the neutral axis of the Support Beam
moved as far away from the centerline of the strand as was allowed. In reality, the neutral axis
will not move this far and so the bending distribution in the actual strand will be better.
However, the significant amount of tensile strain from the temperature expansion coefficient
mismatch will remain.
It was known before performing the bending tests at the National High Magnetic Field
Laboratory that the thermal mismatch would place the strand in tension. This is why the samples
were purposely mounted loose in the Support Beam in an attempt to ameliorate the tensile effect,
as verified by figure 4.28a. Although the strain analysis shows the possibility of a large tensile
strain on the samples, it does not explain why the critical current measurements were lower than
expected when no bending load was applied to the samples.
176
4.11 Conclusion
In conclusion, a bending mechanism has been designed, constructed, and used to measure the
critical current of Nb 3Sn superconducting strand. The mechanism loaded several titanium alloy
beams holding superconducting samples over a range of large-displacement bending motion
from an initial undeformed state to a maximum bending state of 0.7% strain. The loading
occurred in a 4.2K liquid helium bath and a magnetic field of 12T.
The measured data showed that the mechanism produced a bending distribution along the loaded
beam that remained within 20% of the intended strain level for all of the strain states.
The critical currents of two different types of internal tin Nb 3Sn superconducting strand samples
manufactured by Intermagnetics General Corporation (IGC) and Oxford Superconductor
Technologies (OST) were measured using the bending mechanism. The test results showed that
the critical currents and the n-values of the samples decreased with increased applied strain.
After testing, the samples appeared to have been plastically deformed by excessive tensile strain.
An analysis showed that the offset of the strand from the centerline of the support beam could
have caused the tensile strain. This offset did not significantly change the applied bending, but it
could have superimposed a large tensile strain that would have contributed to the degradation of
the samples. In addition to the offset, a temperature expansion coefficient mismatch between the
test samples and the titanium alloy support beam added to the tensile strain.
It is hoped that future efforts will be able to improve on the work that was undertaken to develop
a new method for characterizing the bending strain behavior of Nb 3Sn superconducting strand.
This has been the case with uniaxial testing which has benefited from 25 years of refinement.
177
4.12 Recommendations
There are several recommendations that can be given for any future efforts in performing
bending-strain behavior characterization tests on Nb 3Sn:
The bending mechanism was designed to test the longest possible sample in the chosen magnet
bore. This decision limited the strength of the mechanism and, consequently, the thickness of the
support beam that could be used to hold the Nb 3Sn test samples. This beam thickness meant that
the samples were not positioned with their centerlines coincident with the centerline of the
support beam. This might have caused a significant tension in the strand at the higher applied
bending levels.
If a large-displacement variable-strain bending mechanism were going to be used to perform
bending-strain behavior tests it would ideally be of a stronger design. This would allow a thicker
support beam to be used where the strand could be positioned directly on the beam centerline. A
stronger mechanism made out of the same material would mean that the test sample length
would be shorter. It would be of the same fundamental configuration as the present mechanism,
but use stronger single-enveloping wormgears rather than the helical gears. However, it is
important to remember that a thicker beam would be limited by its elastic strain limit.
The existing bending mechanism could still be used for characterization tests. The mechanism is
capable of bending a thicker beam than the conservative thickness which was used in the critical
current tests. The selected titanium alloy support beam was chosen to be as thin as practical so
that there would be no risk of damaging the mechanism before the initial tests had been
completed with the unproven device. And the grooves in the beam were machined to a shallow
depth so that there would be little risk with the beam failing.
If subsequent tests were done, a beam of the same thickness could be machined with deeper
grooves so that the strand would be positioned at the centerline of the beam. However, as
178
discussed earlier, this might result in high stress concentrations near the grooves and result in
beam failure. An alternative would be to purchase thicker beam material and then have it ground
to a specified thickness before machining the strand support grooves. Because of strength
limitations, this thickness should be no more than 0.079 inches (2mm) for a titanium alloy beam
used in the present bending mechanism and loaded to a maximum strain state of 0.7%.
If a thicker support beam were used, the maximum testing strain state should be lowered.
Otherwise, the beam would plastically yield at the surface and significantly affect the bending
distribution. The chosen beam thickness used in the critical current tests was approximately
twice the thickness of the sample diameter. This meant that at a sample bending strain of 0.7%,
the strain in the beam was double, or 1.4%, which is the elastic limit for Ti6A14V titanium alloy
at 4.2K.
The present design has difficulty supporting the samples at the lower strain levels. Ideally, the
samples would be enclosed on all sides, but this would limit access for the voltage taps. Perhaps
a Support Beam could be gun drilled with tunnels for the samples. Holes would then be
machined to attach the voltage taps. This sample mounting configuration would require straight
samples and would limit the length of the current joints in the present bending mechanism.
None of the sample measurements had a resistive component. The voltage-current plots were
flat until the sample either transitioned or quenched. This indicates that the current had
satisfactorily redistributed in the sample before the voltage taps.
The loose mounting of the samples possibly contributed to the lower than expected critical
current measurements for the conditions of zero applied bending strain. But it is not clear what
the primary cause of the initial degradation was because it continued even at the higher and
better-supported bending states. The degradation may have somehow been caused by the heat
treatment fixture affecting the temperature distribution in the strand during the heat treatment, or
it might have been the result of handling damage during soldering. Handling damage is unlikely
179
because similar degradation occurred for all of the samples, not just a few. Whatever the cause,
it had to be common to both the IGC and OST samples.
The bending mechanism was designed to be as universal as possible. This means that a new
sample support system could be designed and used with the same mechanism. The only
important thing to remember is to have the flexible portion be the same length as specified in
section 4.1 and have it centered on the pivot axes.
There was a problem with the bearing surface on the Input Shaft worm, which can be seen in
figure 4.31. The design dictated that the worm threads should be machined over a limited
distance, leaving extra material for the bearing thrust surfaces. Unfortunately, the gear machinist
did not follow the drawing and machined the worm thread along the entire length, which
significantly reduced the thrust face of the bearing surface. The thrust face should have been the
entire larger diameter shown in the figure rather than the smaller machined diameter. This
weakness was the primary concern for failure when the mechanism was operated.
Reduced
Bearing Thrust
Surface
Larger Diameter of
Intended Thrust
Surface
Fig. 4.31. Bearing surface of bending mechanism Input Shaft.
180
Appendix A - Bending Error Estimates
Displacement Error Effect
It was shown in section 2.4 that the bending mechanism produces a displacement error at the
ends of the beam when compared to the ideal case. The effect of this error on the bending
distribution can be estimated using several methods such as a finite element model, solving the
governing differential equations, or approximating with a small-displacement analysis.
Each of these procedures is complicated and either requires a considerable amount of time or
does not produce accurate results. An alternative and more tractable procedure can be used for
estimating the magnitude of the effect of the displacement error in the bending mechanism on the
bending strain distribution. It estimates the bending strain at the center of the beam by
comparing the ideal displacement to the actual mechanism displacement. The procedure
follows:
The ideal displacement at the ends of the beam as a function of rotation angle, 0, and sample
length, Ls, was given by equation 2.34 and is restated as A.1. The displacement caused by the
bending mechanism is expressed in equation A.2 after combining equations 2.35 and 2.37 and
expressing L,/L, in terms off The displacement error is the difference between the mechanism
displacement and the ideal bending displacement as shown by equation A.3.
= L 1 sin ]
0
2 _
U
-
Umech
-
1
-- LS
2
(1
I
f)(
~
(A.1)
f
- cos 0)
(A.2)
182
U ero = Umech
-
(A.3)
ideal
The ends of the beam must be moved in order to change from one bending state to another. The
amount of this movement is expressed in terms of the rotation angle for the ideal situation and
the bending mechanism in equations A.4 and A.5. The overall displacement error that results
from changing between the two bending states is given by equation A.6.
Auideal
=ideal (02
ideal
(01
(A.4)
Auuech
=cmech(2)Umech (1)
(A.5)
Auerror
= Aumech
(A.6)
ideal
When changing from one bending state to another, the significance of the displacement error at
the center of the beam can be determined using equation A. 7. This equation compares the
displacement error at the center of the beam to the amount of ideal displacement required to
move between the two strain states. For example, if a beam were displaced to a bending strain of
0.004 in/in from an initial bending state of zero and equation A. 7 gave a value of 0.1 then the
largest effect that the displacement error could have is to increase the bending strain at the center
of the beam by (0.1)*(0.004in/in) or 0.0004 in/in. This would result in a maximum bending
strain at the center of the beam of 0.0044 in/in. If equation A.7 gave a negative value then the
bending strain would be reduced.
Error Multiplier = Auerror
(A.7)
Auideal
The use of equation A. 7 in estimating the bending strain error assumes a linear relationship
between the displacement and the bending state of the beam, which is not correct. Since the
bending state of the beam is directly proportional to the applied rotation angle, the form of the
183
actual relationship between the displacement and the bending state is shown in figure 2.6. The
trace in this figure could be reasonably approximated with a straight line, which means that
equation A. 7 actually provides a fair estimate.
The connection between the rotation angle and the bending strain state of the beam was
originally given by equation 4.1 and has been rearranged to yield equation A. 8.
0 =LI
d,
(A.8)
By substituting equation A. 8 into A. 7, estimates can be made about the bending errors in the
center of the beam at various strain levels. Table A. 1 lists the estimates of the actual bending
strain at the center of the beam produced by the mechanism according to equation A.7. The
estimates were calculated for a beam length of 4.672 inches (118.7mm) and a bending ratio of
f=1.57. The strand diameter for setting the bending strain state was 0.032 (0.81mm). These
values were chosen because they correspond to one of the actual beams that were tested in the
bending mechanism.
The first column of table A. 1 represents the bending strain for the ideal case. The second
column is the result of applying equations A. 7 and A. 8 to the bending strain in column one.
Equation A.7 uses equations A.4 and A.5 to determine the changes in the displacements. These
equations need two strain states; a zero bending strain (0 = 0) was used for the initial strain state
and the bending strain listed in column one was used for the second strain state.
The strain error in the third column is the product of the values in columns one and two. And the
last column is the estimate for the bending strain in the center of the beam which is calculated by
adding the first and third columns.
184
Table A. 1. Estimate of actual bending strain at center of beam.
f
1.57
Ls
4.67185
0.03189
ds
Ideal Bending Displacement
Strain
Bending
Strain, s
Error
Error
Strain
(in/in)
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
Fraction
0
0.08839
0.08605
0.08216
0.07669
0.06967
0.06107
0.05090
(in/in)
0
0.00009
0.00017
0.00025
0.00031
0.00035
0.00037
0.00036
Estimate
0
0.00109
0.00217
0.00325
0.00431
0.00535
0.00637
0.00736
The bending estimates can be compared with the measured data for the IGC 157 sample in
section 4.9. The results presented in figure 4.25a for the strain at the center of the beam are very
close to the estimates up to a bending strain of 0.005 in/in, when one of the strain gages
delaminated. At an ideal strain of 0.005 in/in, the measured strain was 0.00519 which compares
well with the estimate of 0.00535 given in table A.1.
The derivation of equation A.7 ignores the nonlinear relationship between the bending
displacement and the strain level. A more accurate estimate can be found which accounts for the
nonlinearities using a differential approach to the change in displacement. In this procedure, the
derivatives given by equations A.9 through A. 11 replace equations A.4 through A.6 and equation
A.7 becomes A.12. Equation A.8 remains the same. Table A.2 reflects the updated calculations.
185
L sin0
2 s 02
dui_I
dO
dumc
I
._
dO
L s I-
2
cos 0
(A.9)
0
I
- sinO
f
due,,or
dumech
duid"al
dO
dO
dO
(A.10)
(A.11)
Error Multiplier = duerrorldO
(A.12)
du
,,dO
Tmidealro
Table A.2. Derivative estimate of actual bending strain at center of beam.
f
Ls
ds
1.57
4.67185
0.03189
Ideal Bending
Strain, ,
(in/in)
Displacement
Error
Fraction
Strain
Error
(in/in)
Bending
Strain
Estimate
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0
0.08761
0.08292
0.07507
0.06399
0.04960
0.03179
0.01040
0
0.00009
0.00017
0.00023
0.00026
0.00025
0.00019
0.00007
0
0.00109
0.00217
0.00323
0.00426
0.00525
0.00619
0.00707
The bending estimates in table A.2 are even closer to the measured values than table A. 1. For a
measured strain of 0.00519, the new estimate is 0.00525 in/in.
186
Effect of Lorentz Force
The effect of the Lorentz force on the bending strain of the beam can be estimated using smalldisplacement beam theory as follows:
For the critical current measurements, the beam is first bent by the mechanism to the desired
bending strain state. Current is then applied to the samples and the critical current is measured.
This applied current in the magnetic field creates a distributed Lorentz load on the beam.
Because the test sample follows the curvature of the support beam, the Lorentz load is
perpendicular to the beam for all strain states.
The Lorentz load on the beam causes the strain state to diverge from the intended setting. The
direction of the current in the sample tests was chosen so that the Lorentz load would tend to
flatten out the center of the support beam, reducing the center strain. But because the ends of the
beam were prevented from moving by the beam clamps, the outer portions of the beam increased
in bending strain.
The magnitude of the strain changes can be approximated by assuming that the beam is straight
and fixed at the ends with a distributed load as shown in figure A. 1 a. Thus, standard beam
formulas apply. The internal moment distribution of the beam shown in figure A. lb is given by
equation A. 13 [A. 1]. The distributed load, w, is evenly applied over the entire beam length, 1.
The straight beam configuration serves as a good approximation because, even though the beam
is bent into a curvature, the Lorentz load always remains perpendicular to the beam. The
cumulative strain state of the beam is estimated by simply superimposing the strain caused by the
Lorentz load onto the bending strain set by the mechanism. Equation 3.6 gives the relationship
between the internal moment in the beam and the bending strain state of the strand. It has been
restated as equation A.14. The variables E, b, and h are, respectively, the elastic modulus,
height, and thickness of the support beam.
187
'II
1
I
4~L4~444kI1]
M
+
Fig. A. 1. (a) Beam with uniform load and fixed supports, and (b) moment distribution.
M = '
12
(6lx-6x2
_12)
M = 1 Ebh'
(A.13)
(A.14)
6 d,
Equations A. 13 and A. 14 can be combined to express the bending strain (in terms of the strand
strain) that is caused by the Lorentz force, yielding equation A. 15.
strand
= wd 3 (6lx -6x2 _/2)
2Ebh
(A.15)
188
The estimate of the Lorentz force effect on the bending distribution can be compared with the
measured data, using the information collected for beam EU153. This beam was 4.553 inches
(115.6mm) long, 2 inches (50.8mm) high, and 0.065 inches (1.65 mm) thick. At 4.2K it had an
elastic modulus of approximately 18.9 Mpsi (130 GPa). The test strand had a diameter of
0.03189 inches (0.81mm).
At an applied bending strain of 0.001 in/in (0.1%) the maximum current in the test sample was
138 A. In a background magnetic field of 13T this created a distributed Lorentz load of 1794
N/m (10.244 lb/in).
Using equation A. 15 at the center of the beam (x = 1/2), the calculated bending strain caused by
the Lorentz load is estimated at -0.000326 in/in. This is more than double the actual
measurement value of -0.000144 in/in. For an applied bending strain state of 0.7%, the
distributed Lorentz load was 1105 N/m (6.31 lb/ft). This corresponds to an estimated strain
change of 0.000201 in/in. The actual strain change was 0.00003 in/in. The straight beam model
is more accurate at the lower applied strain levels, because the beam has less curvature and is
closer to the model conditions.
The simple beam model is able to estimate the Lorentz effect at the lower bending strain levels
within an order of magnitude. This estimate is accurate enough to show that the Lorentz load
would have a minor effect on the bending distribution in the beam.
It was known before testing that the effect of the Lorentz load would be most significant at the
lower bending strain levels. The first reason is because the current limit of the samples was
expected to be higher at the lower bending strains. The second reason is because the curvature of
the beam at the higher bending strain levels gives it more support against the distributed load;
much of the force goes into shear rather than bending. The Lorentz effect is more important at
the lower applied bending strains because it is a larger fraction of the total strain. A change of
-0.0003 in/in at 0.1% strain is more significant than that same change at 0.7% strain.
Appendix B - Gear and Spline Calculations
The gears and splines used in the bending mechanism were designed using the equations
included in this appendix (see references B. 1, B.2, B.3 and B.4). Helical gears were used for the
wormgears so that the center distances could be optimized and built with readily available
tooling.
Gear Calculations
To select a gear combination the designer chooses the first five parameters listed below and then
the remaining dimensions are calculated using the following equations. This process is iterated
until a gear combination is found which satisfies all of the space and strength requirements.
Normal Diametral Pitch:
Pn
Tooth Pressure Angle:
Lead Angle of Worm:
Number of Worm starts:
Teeth in wormgear:
A
n
Ng
Common Dimensions (these dimensions are the same for both the worm and the wormgear)
Transverse Circular Pitch:
Pt
Addendum:
a-
Whole Depth of Tooth:
ht =
P, cos(A)
1
P.
-2.200
+0.002
P,
Working Depth of Tooth:
hk = 2a
Tooth Clearance:
C
Tooth thickness at Pitch Circle:
t2
Worm Dimensions
ht -
2Pn
hk
190
Lead of Worm:
L = p,n
Pitch Diameter:
d =(
Outside Diameter:
do =:d+2a
Root Diameter (minor diameter):
di = do - 2h,
L
7r tan(A)
Helical Wormgear Dimensions
Helix Angle:
Pitch Diameter:
D=
N
g
Pn cos(i/)
Outside Diameter:
Do =D+2a
Root Diameter (minor diameter):
Di =Do - 2h,
Gear Set Dimensions (the set includes the worm and wormgear)
Center Distance between worm and wormgear:
C=
Minimum Face Width for Wormgear:
FG =1.125 (d + 2c) 2 -(do - 4a)2
Minimum Face Width for Worm:
Fw = VD2 - D 2
2
(D + d)
191
Gear Strength
The strength of the gear teeth were estimated using the modified Lewis bending equation [B.2].
This equation is intended for spur gears and so it provides a conservative design when applied to
helical and worm gearing. Failure by bending will occur when the significant stress equals or
exceeds either the yield strength or bending endurance strength.
K W'
FY
Bending stress in gear tooth:
where
Transverse Load on tooth:
W
Gear Face Width:
F
Lewis Form Factor:
Y
(Derived from tooth geometry; usually looked up in a table)
1
Velocity Factor:
50+
50
(V is the pitch-line velocity in ft/min)
Table B. 1. Gear parameters for bending mechanism wormgears and worms.
Wormgear
Worm
P,
0
X
n
Nm
Torque Gear
Drive Shaft
16
200
50
1
36
Drive Shaft
Input Shaft
24
200
30
1
27
192
Involute Spline Calculations [B. 1]
Basic Dimensions (ANSI B92.1-1970, R1993)
To select a spline configuration the designer chooses the first three parameters listed below and
then the remaining dimensions are calculated using the following equations. This process is
iterated until a spline size is found which satisfies all of the space and strength requirements.
Flat Root Side Fit
Number of Splines:
Pressure Angle:
Diametral Pitch:
N
P
N
Pitch Diameter:
D
Base Diameter:
D, = D cos($)
Circular Pitch:
p=-
P
P
Minimum Effective Space Width:
S
=
2P
D N +1.35
Major Diameter, Internal Spline:
P
N+1
Major Diameter, External Spline:
P
Minor Diameter, Internal Spline:
Di
Minor Diameter, External Spline:
Dre
Form Clearance (radial):
CF
N-1
P
N -1.35
P
193
Form Diameter, Internal:
Form Diameter, External:
DFi
=
DFe =
N±+12
+
P
N-I
-
F
2cF
Circular Tooth Thickness, Maximum Effective\Actual:
c, Max (table look-up)
Circular Tooth Thickness, Minimum Actual\Effective:
c, Min (table look-up)
Table B.2. Spline parameters for bending mechanism components.
External Spline
Internal Spline
Tolerance Class
N
#
P
Torque Gear
Input Shaft
Torque Arm
Coupler
5
5
12
8
300
300
20/40
24/48
194
Appendix C - Drawings
Bending Mechanism
Fig. C. 1. Bending mechanism model.
196
12
11
16;
17
9
10
7;
2
Bending Mechanism Parts List
1. Bottom Plate
2. Top Plate
3. Torque Gear A
4. Torque Gear B
5. Drive Shaft
6. Input Shaft
7. Torque Arm 153
8. Torque Arm 157
9. Beam Clamp A
10. Beam Clamp B
11. Beam Clamp C
12. Beam Clamp D
13. Thrust Bearing
14. Plate Spacer
15. Shaft Coupler
16. Support Beam 153
17. Support Beam 157
(1)
(1)
(1)
(1)
(1)
(1)
(2)
(2)
(1)
(1)
(1)
(1)
(2)
(4)
(1)
(1)
(1)
PBD-001-001
PBD-001-002
PBD-001-003
PBD-001-004
PBD-001-005
PBD-001-006
PBD-001-007
PBD-001-008
PBD-001-009
PBD-001-010
PBD-001-011
PBD-001-012
PBD-001-013
PBD-001-014
PBD-001-015
PBD-001-016
PBD-001-017
Fig. C.2. Bending Mechanism Parts List.
131
31
34
-5
I-
F2 . 3-7
2
0.26 (FDRILL)
0.266 (F DRILL)
..
.4X
X0CHAMFE
4," X .03
21
0
2.700
0
0
r
0
12K 2.752|
2CHANFER
00 0
0535
4
.000
0
.1005
2
410-257 (F DRILL]
1# 10. 005JAIlal 12
*0.OODI
z
490221(#2 DRILL]
EDOI
FEI
.500
415
2N
0;
I
32
U% 2.752
|X2
15
4X 0.257
(F DR ILL)
0
0
1F2
MIT Pian
Science rFusion Centsr
UNLESS OTHERWISE SPECIFIED
DINEHIONS: INCHES
NATERIAL:
TOLERANCES:
DRAWN BY:
DATE:
20 FED
3CALE; 0.333
.xK
± .01
:k .001
FRACTIONS ±
ANGLES A
Xxx
PART NAME: BOTTOM PLATE
PART NAME: BOTTOM PLATE
TY BEOP:
At: ASTN A240
UNS 311600
I PER ASSEMBLY
DAVID L. HARRIS
095
SIZE: A
PART No: PHDal-001
IPART No: P80-001-001
1REV: C
IREV: C
rS
0
00
0
11*Be
0.0
2x
A B.06
CHANTER 4i" X
.O41340'04Q
l
0.880
0
0-50
0%
~500 T .2502
J*1 .000a A1
0
29.CHANFER
10-
X
7HAFE
0
$.266
(F
DRILL]
0.256
|
.1
1-2-
0 0.
2X 2.752
.0
(F DRILL]
2%.3T5l
11
F44CR
2x1. 1
.410,.88
0
9E7
01
FE
.500
.475
-L
4X 0.251
0
(F D-RILL)
1*1#.0951AJsi
2M 2.152
212.155
2.52
42
32
410 ,257 (FDRILL)
1#1.005 JAJ
MIT Plasma Scince & Fwain CAmter
UNLESS OTHERWISE SPECIFIED
DIWENSIONS; INCHES
TOLERANCES:
.11 :1- .01
FRACTIONS 6:
.]I t: .001
ANGLES ±
PART NAME:
TOP PLATE
Re:
NATERIAL! UNS S3110
I PER ASSEMBLY
OTY REMD;
DRAIN Y: DAVID |, HARRIS
DATE; 31 AY 2005
SCALE: 0333
SIZE; A
PART No: PBOD-O-D2
*ASTA2AD
IREV: C
1.250
1.100
.55-
-750
WORW46EAR
.
0" X .03
SPLINE
10
,00081
AM
-
INVOLUTE HELICAL WC091EA
Numbor of Toth
Rl5
Normal Premnure Angle
Normal Diametral Pitc
Helix Anglc
Transcric Circular Pitch
Pitch D iffeter
2,25850
Outoldo Digmtor
Fait Width
0.050
Addendum
Ihole Depth
0. 13150
lorking Dcpth
0.12500
Clearance
0.01450
Tooth Thcicness
0.0981 ?
Center Dialanta Iref)
1.48785
Backlash ii Assembly
0.003
Reftrcncc AGNA Guali1y Na. 9-10
32
R,-1Pie el
-A
NATING MORN IREFERENCE
PART Na. PD-001-DDn
Number of Threads
Narmal Prcssurc Angie
Lead Angle
Hand of Lead
Axial Pitch
Pitek DIameter
Outaide Diaeter
20'
5,00on
RH
0.19110
0.71711
0.84211
Add idumh
0. 13950
Whole lfepth
NOTES:
I. All of the Scar tenth iurfates and Ihe surfucas that
have a
llnlah aptelfleatlen arm
aurfare
to hai. the
following cLating applicd:
Malybdenum Diiulfidc
2. Clock the Exterial Sp line relative 1o the Wora ear
so that each Spline Tooth enterlilnd exactly a Igns
with a lermgar Tenth cenler lino.
MrrP
a. Machl e the 01.25 hale in that It
is ccitered an a spline tooth canteriinc.
DINENlIONS: INCHES
TaLERANCES:
Xxx
#
.250
02.3816
X .03
2 Places
EXTERNAL INVOLUTE SPLINE
(ANSI B92.1-1910. R1193)
Flat Root Sidc Fit
Number of Teath
Pitch
Preuuilre Angle
Boaa Diametar
Pitch Diameter
Major Diumctcr
Farm Diameter
Miner Diameter
Full-Depth Tooth
Face WldtI
Circular Teeth Thickness
Max Effectine
Min Actual
Talerance Clsa
Reference PART No.
12
2040
30'
0.51162 ror
D.60011 ref
0.65000
0.549
0,533 min
C:)
0.500
0
0.07854
0.01191
H
5
P50-001-007
iKmla Science & Fusion Cmntar
FRACTIONS ±
ANGLES ±
UOS 531600 ReF! ASTN A216,AAT1
YTREID; I PER AMEWLY
DRAWN rY: DAVID L. HARRIS
20 FEB 2015
DAM
SCALE; 1.000
ilE:;
TORQUE GEAR A
PART No: PSl-O0l-OO3
UNLESS OTHERWISE SPECIFIED
.xx
21
4
16
h
ARID
± .01
t .001
PART NAME:
NATERIAL:
REV: B
L
1,100
.2ID-
.T5D -
IORNOEAR
0
2Place
0
I
-. 0v -
i
.
SPL INE
-t
J10.00081A 10
0D
2.0 1.
INVOLUTE HELICAL UERNGEAR
Numbcr of Teeth
Normal Pressure Angle
Hermal Olametral PItch
Helis Angle
Tranzmiorse Circilar Pitch
Pitch Diameter
Outside Diameter
Face idth
Addendum
Whale Depth
Workiug Depth
Clearanc e
It
A
30
20'
ii
0 19710
2.25559
2.34359
0.150
0.06250
0.13950
0.12500
0. 01450
Tath Thickness
0.09817
Center Distance (ref)
1.48785
0.003
Backlaih In Aiently
Rafrentn AGMA Quality No. I-iD
U4 V NKa0
N 03
YU.1
=-AI
32
4ir X .03
R.0O
4 Places
MATING WDRM (REFERENCE]
EXTERNAL INVOLUTE SPLINE
PART No. P80-001-005
Number of Threads
Narmal Pressure Angie
Lead Angle
Hand af Lead
Atial Pitch
Pitch Dianeter
Outside Diameter
Addendur
Ehole Depth
Flat Reat Sid. Fit
Number if Teeth
Pitch
Pressure Angle
Base Diameter
Pitch Dialftcr
Major Dieter
Form Diameter
Minor Diencter
Full-Depth Tenth
FaCe Width
Clriular Tooth ThIckneis
(ANSI 092.l-170, i193)
In'
1.000
RH
U,ISTIG
0,71111
0.84211
o.05250
0.1I3950
NOTES:
Ma
I. All ef the gear tooth surfacci and the surfaces that
hare a surtae fInlIh specIfIcatIon are it have the
following coatings applied!
2. Cloek the Erternal Spline relallrn to the Warmgear
so that ach apl ine Spare centerline ezactly align:
with a worigear Tooth centerlle.
Nathine the 0.125 hole so Ihat It
is cantered on a apl ine fitth contrline-
Effeetlire
win Actual
Tolerence Class
Rcference PART No.
Molybdenum Disulfide
3.
2 Places
12
20'40
0.51962 ref
0.60000 ref
0.65000
0.541
0.533 min
0.500
0.0?554
0.01531
VD-QI-0
PBD0l-0
MIT Plasma Sciatca & Fusion Center
MATERIAL:
UNLESS OTHERWISE SPECIFIED
DINENSIONI; INCHES
TOLERANCES:
.u1 -: .01
FRACTIONS :
. 1K d:.001
ANGLES 1
UN$ $1I00. Wv AST
TY RE0P
ER ASSENBLY
DRAIN aY: DAVID L. HARRIS
DATE; 20 FEB 2005
SCALE: 1.000
SIZE: A
PART NAME:
PART No: PD-00i-004
TORQUE GEAR B
4
REV: B
.10
.10
r
-
.000
WORMBEAR
---.
0
1.70 ref
-
.80IVH N
M
55
5.2 II
.3741
3741
0L3745
----- ------ _-CH MFER
CHANFER
45"45
HELICAL WORM6EAR
of Teeth
Preisure Angle
Dlmnatral PItch
Hells Angle
Trananerie Circular Pitch
Pitch Diamcier
Otside Diameter
Fate Width
Addendum
olf Depth
lorking Depih
Clearance
Tooth Thichiess
Center Dlitante Iref)
Backlash In Assembly
iRefaranea AGMA Quality No.
INVOLUTE
Nunber
Normal
Normal
I
2 Places
..
27
21r
24
3.Doe
0.13101
1.12154
1.20988
0.800
0.0416?
0.09361?
0.00333
0.01033
1.106345
0.96134
0.003
9-10
X 0380
CH MFER
CHAMFER
457
.03
2 Place&
MATING WORM [REFERENCE)
PART Ng. PBD-001-006
Number of Threads
Normal Prestura Angle
Lead Angle
Hand of Lead
Acigd Pitch
Pitch Diemcticr
Outside Diarieter
A4dendum
Uhola Depth
2r
3.000
RH
0.13105
0.19814
0.8947
0.04167
0.0367
.4
INVOLUTE WOHN
Number of Threads
Normal Preiamra Angle
Lead Angle
Haid of Lead
Aiial Pitch
Plich Diameter
Ouislde Dlmamter
Full-Depth Tooth
Threaded Length [min)
Toial Threaded Length [ma:)
Addendum
Whole Depth
Working Depti
Clearantes
Tooth Thickness
Cciter Distaice
(rcf
Backlash in Assembly
Reference MANA Ovality N.
2t
5.ood
RH
. 19710
0.71711
0,84211
I.000
I.600
Q.06230
0. 13950
0.12500
0.01450
0.09817
x .03
MATING WORMEAR (REFERENCE]
PART No. PBD-001-003
PART No. PBD-0DI-004
Number af Teeth
3'
Normal Preaire Angle
20"
Normal Dlameiral Pitch
Helle Angle
5. coop
Tranararue Circular Pilch U.111710
Piich Diameter
2.25059
Ouiside Diameter
2.38359
Addendum
0.01250
While Depth
0.13950
in
1.4BTS
0.003
0-10
0
Cd
U
NOTED:
I. All of thu gear toath iur farea and the sur faces that
hold a Surface finish ipelfcatlon are to hdre the
folybeing coaunga applied:
Mblybimnum Diullide
Mrr Plafna Science & Fusion Center
UNLESS OTHERWISE SPECIFIED
DINEN4IONS: INCHES
TOLERANCES:
.ix ±.01
.KK ± .001
PART NAME:
PART NAME:
FRACTIONS ±
ANGLES ±
DRIVE SHAFT
OH lYE SHAFT
MATERIAL: OHS 331500
Her: ASTM AZTGAI?
GTY RIOD: I PER ASSEMBLY
DRAWN BY: DAVID L. HARRIS
DATE; N FED 2005
3CALE; 1.011
SIZE: A
PART No: POD-001-005
IPART No: PDD-OOI-005
1REV: B
B
IRFY:
to
ZI.
l.E5U
-25 rat
00
- .50 -4.
SPL INE
C
.
S~uME32
-
32
0.,315
c-fl
A
z0
12 51
1250
41X0
I.1
0
0.8
Places
£7 .001
-0-1
a
a
a
WAING WORNSEAR 4REFERENCE0
INVOLUTE WORM
Number of Threads
Nnrmal Pressure Angle
Lead Angle
Hand of Lead
Axial Pitch
Pitch Diameter
Outuid Dinameter
a
ED
3.000
RH
0.13108
0.81947
Full-Depth Taotl
Threded Lenith Imii
Total Threaded Lenlth Imail)
Addendum
Whale Depth
Wnrkimg Depth
CIcarance
Tuath Thirkneia
Center Distance (ref)
Backlash In Asieably
ReFerene ASMA Quality No.
S.
5000
0. 1500
0.04161
0.0136T
o. 0333
0.01033
0.01543
PART Na. POD-001-005
Number of Teeth
Normal Prcssure Angle
Normal Diaiietral Plitch
Helix Angle
iranosyr4 Circular PItch
Pitch Dianeter
Outside Diameter
Addendum
Ihole
Depth
27
21f
24
3.s
OW
0.13101
1.12654
1.209811
0.0414 7
0.0936?
0.08134
0,003
N-19
45" N .03
2 Plncai
EXTERNAL INVOLUTE SPLINE
(ANSI 892,1-1970, R113)
Flat Root SIde Fit
Number if Tooth
a
Pitch
24141
Pressure Aigle
Base Diameter
0.M64 ref
Pitch Diandter
0.33333 ref
Mfjor Din
ter
Form DIlamler
Minor Diuaeter
Full-Depth Teth
Faec Iidth
Cirtular Tooth Thickneis
Nal Effectiri
Win Actual
Tolerance Class
Reference PART Na.
0.31100
0.291
0.277 min
0.500
0.064
0.DIII
S
PBD-D-01 l
NOTE!;
of the gear tenth iurfaces end the surfaces that
have a surface finish speilfIcatlei are to hare the
following coot ings applied:
All
Malybdanum Diumifido
2.
Mach Ine the $ .125 hole ha that It
i4 centered on a spline Iooth centerline.
MIT Plasma Scienca & Fusion Center
UNLESS OTHERWISE SPECIFIED
DIMENSIOHN; INCHES
TOLERANCES:
11 := .01
FRACTIONS ±.ImI
.001
ANGLES 1
PART NAME:
PART NAME:
INPUT SHAFT
INPUT SHAFT
MATERIAL
UNS 531500
Ref- &STW A2?ILA479
OTY REOD;
I PER ASSENBLY
DRAIN BY:
DAVID L. HARRIS
DT:
20 FEB 2005
SCALE: |,000
SIZE: A
IPART No: PBeD00-00
IPART No: PBO-O0i-000
IREV
IREV::
a
2X R. 12
(N
e-.I
000
5255
0500 1
I25
l.144
0:2_ Drilli
000niA HO12
|4|10
051A10|
ticr ibe
"1.5'
n"end
CHANFE
2K
4&1.07
1* 1. I na
y.10
t53
.5UU
--
|2N~~1 F- ..
1
N
-
#2 7 100 -000
6
Intcrnal lirstutC Splint
(ANSI 1 H2. 1- 190, R1031
Flit Root Side Fit
Number of Teeth
12
Plit
20140
Prassure Angla
se
Bnsc Diaratpr
0.519512 rcf
Pitch Diameter
0.10000 r cf
0.66?50 mat
NaJor Diameter
0.651
Form Diameter
MInar DIameter
0.550
Faca Vidih
Thru All
Ciriular Spacr Width
91011117
Nax Actmal
Nin EffactIve
0.0?654
lerance Clisi
5
Referente PART No.
PBD-001- 003
POD-001-004
z
CHANFER
-
4f 03
-il
----
Ii gn the sp Iin cut (
the part's _
as shown
- -- .
T.
Mfl Pwra Sciiice &Fusion Cnter
UNLESS OTHERWISE SPECIFIED
D1NEN1ONS: INCHES
TOLERANCES:
.Kx
.xxx
±.01
I.001
FRACTIONS ±
ANGLES ±
PART NAME: TOROUE ARM 153
PART NAME: TORCUE ARM 153
_
I-
UNS S3160D Ref: ASTM A240
2 PER ASSENRLY
DRAWN BY:
MAVID L. HARRIS
DATE:
la FED 2005
3CALE: 1.000
SIZE: A
NATERIAL:
OTY REOD:
PART No:
PART No:
PSvo-ooi00
p~i-oai-aoj
JREV: ~
0
IREV:
C
H
&
b
t
E5 R.12
0
a
H
C
-t
C
CD
250
|*
-
-
2.900|
-
10 000 1A 1B I
=
0.44
1#27 Brill I
z
C
Ins r i be
'1.51'
a end
CHANFE
2X 5'z07.01
.5500
0
a
a
a
.
1250
0 .501223
00
z1.350
-* .00
.15E0
.j34j*21-Drill]
1*0 . 0SA1
003
.70
3D
Inforial Invelu4. Spline
4ANSI 59E.1-1970. R1113)
Flat Root Side Fit
Number of Teck
PItch
Preiiure Angle
Dsi Diameter
Pitch Diameter
Major Diameter
Form Diameter
MInor D I ameter
Fact Wtldth
Circular Spaeed 1Ith
Mai Actual
Min Effectiic
Tolerance Clvi.
Referente PART No.
CH BFE
451.03
12
20)40
30"
0.51962 ref
0.60000 ref
0.16750 max
0.651
0.550
Thru Al
0.091171
0.0754
5
P0D-001 -003
POD-001-004
-E-- -
MIT Plasma Sdene &
(
-I-
FWin Canter
UNLESS OTHERWISE SPECIFIED
DIMENSIONS; INCHES
TOLERANCES:
. :6 .01
FRACTIONS :I
.mt .001
ANGLES 1
P A RT NAME : TORQUJE ARM 151
PART NAME:
li I the spliae cut
with the port'u 4.
TORQUE ARM 157
MATERIAL!
OTY REO0:
31600 Ref: ASTM A240
? PER ASSEMBLY
DRAIN BY: DAVID L. HARRIS
DATE:
I FEB 2005
SCALE: 1000
silE: A
PA RT No:
No:
IPART
UNS
POD-001 -008
PBD-0QI-008
IR
E V: B
B
IREV:
V)~
1.150
K
~I .350
1.000
31 .200
Frb-i
,~s0
-f.255
IN .250
io
o o I
0
0
o
5
I I.000IIAI I
2
._________
3x - 129
3x R064
-
-
0
0
0
1 105
0
R.063
0
3
0
HOLES
4-40 UNC-2b TAP T 0.25
#43 DR ILL
M09) 0.40
II.005 A
1I---
5I$!.I44 f*2? DRILL]
.003
AB
IR064
I
4K
~- ~
.53
~
0
.
cd
~
TOD reF
CHANFERED
4VW XEDGE--\,
)
D
.25
Too1
rtf
.415
1l
W0.3-
;]
2.30
- wc
-A
NOTE ;
1.Three chonnca
Qrc machin-ed into ihe pnrt'a
5*I1d SANG wIre wI0
aurfae aa ahovn.
Neep ihib in miud
bc mplaed in ihe channell.
wh i machInIng the chanieI ge metry.
Ml PLwra Sciencx & Fusion Cmntar
UNS S31611 Rif: ASTM A240
I PER ASWENDLY
DRAWN BY: AVID L. HARRIS
DATE: 21 APR 2005
MATERIAL:
UNLESS OTHERWISE SPECIFIED
DIMENSIONS: INCHES
GTY REID;
TOLERANCES:
.KK ± .01
K
:
i.00
PART NAME:
PART NAME:
FRACTIONS±
ANGLES
i
BEAM CLAMP A
UEAM CLAMP A
SIZE! A
3CALE: 1.000
PART No:- POD-001 -009
IPART
No:
PBD-OOI-DO~
REVIR[V:
U
.12500
~0.I25T
~X .350
2.155
2. 50
o.12?570 f
.1000
* -0 .000|A eBI
A
o
fl
o o
o
as
I
wj
L
.IJ
.A-
0
LIII
.250 r cf
CHANFERED EDGE-4f X .0 0
0
o
Isx .35
-1
0
4E
0
5X 0,144 (#2
0
--
0
0
0
DRILL]
0.005 A B
I . 13
,-
3 HOLES-0.25
A-40 UHC-2b TAP
0.40
#43 DRILL (0.0911
+10.0051 AC
1Z2V
+
+
r~~ir vrf
R..063
.4375
I. IBIS
I ~3I5
MIT Plasma Sdencx & Fuom
UNLESS OTHERWISE SPECIFIED
DIMEN101N:; INCHES
TOLERANCE3:
FRACTIONS :
,1: : ,01
, i .001
ANGLES i
PART NAME:
K
BEAM CLAMP 0
W
Cvnter
RAf! ASTM k240
UNS 31600
I PER ASSEMBLY
DAVID L, NARRIS
2'lAPR 2005
1.000
SIZE: A
MATERIAL!
TY REOD;
DRAIN BY:
DATE:
SCALE;
PART No: PBD-001-010
IREV: B
r-i
-- 0000
-
2-
0.1257v .255
AI
.3S0
-20
0
1.000
0'
2x
-f
0
m
0250
0
311.200
0
I
0
-v-LEI
-A
0
. 30.700-
. 215
0
0
,.460
00
CHANFERED EDGE-2-"'r250
......
59 .144 1#2M DR ILL)
1 1 HB
.0051A
.0
.
I.
23
700
3
HOLE
#43 DRILL (D.09) V 0.40
4-40 UNC-Eh TAP T 0.25
6
141.095 1A IC
R. 063
L-c-" X.03
rc f
33 R.06447
NOTES:
I.
Three hanneli ire machli4
Into fit partU
Solid 8 AWG wire willUNESOHRIEPC
aurfaca asn ahegnbc p~uird in fit channuii. Keep Ibi in mid
whon mehInIng tha thainnel gTnmOtry
MrT Pltma Scikrics &Fusion
OTHERWIE SPEC
&
Cntar
IFIED
DINE11IONS: INCHES
IGLERANCES:
± .01
FRAC TIONS ±
.ii
.KK J -001
ANLES
PART NAME: - EAM CLAMP C
PART NAME: BEAM CLAMP C
±
z
MATERIAL: 1113 331600
ReV: ASTIM A240
%TV gREgD; I PER ASSEMBLY
DRAWN BY: DAVID L. HARRIS
DATE: 21 APR 29)
tCALE 1.000
ShE: A
PART No:
~PART No:
PBO-001-011
PBD-OOI-OIl
JREV: 0
D
IR[V:
00
C 350
/
00
2 .1250
2N
eV0 A 5
.550
0
1* 10.D ooo A
0
3 HOLE
4-40 UNC-2b TAP T 0.25
#43 DRILL t0-01) T 0.40
1*10
250
0
[
0
0
I.
0
ISIS
0
-
-I .530
59 0.144 4927 DRILL
.UU5 ADB
.150
o
4-
LIII
-r~448
11
0-oC
T
T ref
CHAMFERED EDGE
4Y
250 re
{A-]
& Fusion
'Plasma Sdcie
UNLESS OTHERWISE SPECIFIED
MIT
DIWENSIONS; INCHES
FRACTIONS :
. : ,01
.i L : ,001
ANGLES 1
PART NAME:
_
_
_
_
BEAM CLAMP D
BEAM CLAMP I~
_
_
_
_
Rif
MATERIAL! UNS 531600
_
_
_
ASIM A240
OTY RE00; I PER A33MUiLT
DRAIN BY: DVI
TOLERANCES:
PART NAME:
Ciritar
111
fif
45" X
.
2. 30Q
L
HARRIS
DATE.
2 APR 2005
SCALE: 1,000
SIZE: A
PART No:
PART No:
PBO-001-012
PBD-D0I-012
IREV :
IREV:
B
0.'
C
1.00 -
LOU
-
LF
1.153
2X 0.257 (F OHILL)
1* 1 .005|A
.0005 A B
L7 .DOI
060
.250
E-0:E
a
l
-
-- w
en
.7530
C
2350?5
.500
.475f45"
1 1 .0.
C
C
CHAMFER
x .03
ALL AROUHD
6
1
z
*1
CHAMFER
X .03
ALL AROUIND
C)
Mrr Pina Sciance &Fusion Cnter
UNLESS OTHERWISE SPECIFIED
DINEIS1ONS: INCHES
TOLERANCES:
.K
.xx
± .01
± .001
FRACTIONS ±
ANGLES d
PART NAME: THRUST BEARING
PART NAME: THRUST BEARING
MATERIAL: UNS S31100 Ref: ASTM A240
GTY REqD; 2 PER ASSEMBLY
DRAWN BY: DAVID L. HARRIS
DATE: 21 APR 2005
SIZE! A
3CALE; 1.000
PART No: PBD3-001-a13
PART No: PBD-OOt-013
JREV
IR[V:
In
U
H
B
:1:|
0
I.T53
t
2k CHAMFER
45II
1
0
0.257 IF DRILLI
+ 0.00s A B
MIT Plasma Sdcence & Fusion CAter
UNLESS OTHERWISE SPECIFIED
DIMEN3IOHI; INCHES
TOLERANCE5:
= D1
-9
,
.=i
.001
FRACTIONS :1
ANGLES ±
PART NAME : PLATE SPACER
PART NAME:
PLATE SPACER
MATERIAL! U|4P 31E
0 L Rev AJIM A216.Af?0
OTY RE00; 4 PER ASSEMBLY
DRAIN BY! DAVID L. HARRIS
DArE: ED JAN Z905
-SCALE: 1,000
SIZE: A
PART No: POD-001-014
PART No: PBD-0OI-014
IREV: A
A
IREV:
r-A
-A
0
.50
ref
+10.0051 A E
0
250
Internal Infoluto Spline Dato
(ANSI 802.1-I1?0, RII31
Flat Root Side Fit
Humber of Teeth
a
Pitch
E4/46
Preijurt Angle
)f
Bass DIameter
0.28568 rof
Plfteh DIamstir
1.33333 ref
Najar Diameter
0.386 ma
Farm Diamrter
D.37U
Ninar Digmeter
0.M2
Face 114th
A1
SPLI NE
.5D5
0.500
CHAMFER
Circular Space Wldth
Nas
Acual
Nin Effective
inleruace Class
Referencc PART No.
4"
0.0678
0.0154
N|,03
6
|
POD-001-005
SECTION
NOTES:
1. Clock the 0.125 hel. be that It
ii centered on a splinc cut centerlinc.
A-A
0
U
M r PI-ma SCience &Fusion Cmtar
UNLESS OTHERWISE SPECIFIED
DINENliONS: INCHES
TOLERANCES:
.u
± .01
,KKK : .001
FRACTIONS ±
ANGLES
i
PARTf NAME: SHAFT COUPLER
PART NAME: SHAFT COUPLER
MATERIAL: UNS 331600
Rcf: ASIM A27G.A479
GTY REOD: I PER ASSEPELY
DRAWN BY: DAVID L. HARRIS
DATE I FEB 2005
3CALE: 1.000
SIZE! A
PART No: PBD-001-al
PART No: PBI~-~OI-OI~
JREV:
IREV: B6
1
t'J
~j.
q
00
5.253
I-
0
1.305
.416
1.000
I.188
Z-000
zp
P. 00.
4K R.0125
(0.125]
.500
.125
1-975
1.20
.750
I
-----------------------------no -----------------------
4 .032)
0
i
------------------------
-----------------------
9SCALE 1,500
MIT Plasma Sditnc &
UNLESS OTHERWISE SPECIFIED
DIWENSIONS; INCHES
FWiae Cuiter
TOLERANCES:
6i D.
I =: .001
FRACTIONS -L
ANGLES h
PART NAME:
a E~m Is3
PART NAME:
5EAN 153
MATER IA L! S R544QQ ITl A lf
OTY RE00; I PER AHMEBLY
DRAIN By! DAVID L.HARRIS
DATE; 20 FEB 2005
SCALE: 0.500
$12E; A
PART No: P'OD-001-016
PART N~: rDD-OOI-0I6
!REV:
IREV:
C
C
5.~
-7-
i-iT
I.9X.B
1=
A
.4~S
.250
5.072
1.150
2.000
1.000
I. U
-- I .0310
1~
-til --
6%R..062
1.250
.500
.125
T59
1.375
1.go
.01 50-
---------------------------- -0z -- -- -- -- -- -- -- -- -- - -- -:0-
----------------------------S.0321
---------------
------
z
SCALE
500
..
C
Mfr PIwa Science & Fusion Cmtwr
UNLESS OTHERWISE SPECIFIED
DINENIONS: IWCHES
NATERIAL: UN5 R56400 MiBAMI4
IY REED; I PER ASSEMBLY
TOLERANCES:
.xx
± .01
, .001
DRAWN BY: DAVID L. HARRIS
PART
NAME:
FRACTIONS ±
ANGLES ±
BEAN 151
DATE,
V FE 2005
3CALE; 9,500
$IZE A
PART No: PBD-0l-0l1
REV: C
214
Probe
'c
Fig. C.20. Probe model.
215
4
3*
2
10
19
9
87
Probe Parts List
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
Fig. C.21. Probe parts list.
Flange Plate
Large Probe Plate
Upper Small Probe Plate
Lower Small Probe Plate
Flange Insulating Plate
Hand Crank
Support Rod
Current Lead Tube
Liquid Helium Fill Tube
Bending Mechanism
(1)
(1)
(1)
(1)
(1)
(1)
(8)
(2)
(1)
(1)
PBD-002-001
PBD-002-002
PBD-002-003
PBD-002-004
PBD-002-005
PBD-002-006
PBD-002-007
PBD-002-008
PBD-002-009
PBD-002-010
ON
0
0
0
L
0
0
0
750
12X 0 766
o0
ON A 014.25 B.C.
CD
o
a
0-
SCALE
0.125
0
W
3K 2.700
1.844
5.038
TAP 1/2-13
4M 0.4 219
TAP' 112 -13
FLANOE PLATE BOLT HOLES;
ItZ HOLES ON A 0 14. 25 BOLT C IRCLE
-.-
9038
MA
P.l [i
CA
r.
&
UNLESS OTHERWISE SPECIFIED
1mATERIAL
AL 6061
TY REOD; I PER A53ENDLT
DRAIN By! DAVID L.HARRIS
bDIEN310N; INCHES
TOLERANCES:
:1 0.01
. = 0.001
rC
FRACTIONS :
ANGLES ±
PART NAME: FLAMGE
PART NAME: FLANGE
PLATE
PLATE
bArE;
SCALE:
IZ APR 2005
0.250
IPART No: p5o-on-ou
IPART No:
P60-002-001
REV:
IREV:
U
N-
---2.,
21
75
2X
-
cZ. TO-.m
2.9?5 -
-
-'-2.70 -.
So
00
501-
0
a1 $.516
3X
ZR
2.85
s.641
0
oo
000
0
0
SCALE
(CW4 DRILL
(41/64
0.200
DRILL)b
21
2.0.50
CD
-i
2X
2.5fl
2-00
2K
T
2.20
21
c1
.266-
(17104 DRILL)
.961
Mrr Pira Scirce & Fusion Cnter
UNLESS OTHERWISE SPECIFIED
DIMENSIONS: INCHEW
TOLERANCES:
.KX ± .01
FRACTIONS ±
.001
ANGLES ±
.KKK
MATERIAL: GIB
GTY HEQD; I PER ASSEMBLY
DRAWN BY: DAVID LHRRI
PART NAME:
PART No: PBD-002-002
LARGE PROBE PLATE
DATE; 21 NAB 2005
SZE! A
3CALE; 0.350
REV:
t
00
fl
tQ
(p
-I
2. 70
21,0
CA
S
.
00
2. T - -+
1.60+-
000
0
a
1.40 - -
0
0
SCALE
0.250
~1
0
(P
CD
U
04 DRILL)
C
C
K'
C
C
-T
2000
zx 2.70
ax 0.641 (it4
DR ILL
(11164 RILL)
.Dll
---
MIT Plasma Sdence & Fusion Canter
UNLESS OTHERWISE SPECIFIED
DINEN310N; INCHES
TOLERANCES:
.
: .01
FRACTIONS &
.
=: .001
ANGLES 1
PART NAME
:UPPER SMALL PROBE PLATE
MATERIAL! 610
TY RE00; I PER ASSEMBLY
DRAIN BY: DAVID L. HARRIS
DATE;
AR 20
SCALE: 0,400
SIZE: A
IPART No:
PDD-0D2-003
IREV: 0
Cl
2.70
-
2
2.70
-
- 2x I..m
2x
BI
p-
2x 1.81
2K
- 60
--
1.85
2x
60 -
I.50
1.501.40S3x
- .4
29
00
2x
0
0A0
SCAL E 0.250
12% 0.144 13#2 DRILL)
3raE%
2X 0. 141 f 0. 25 (41164 IR I .L)
~1~
2X
55~
2x
4X2 ~ 21
0
0.i0
x #.255
a
X. 51 I3314 DRILL
411)64
DRILL)
.
Mrr Plana Science
-4
1
& Fusion Canter
0
010
I PER
UNLESS OTHERWISE SPECIFIED
MATERIAL:
DINEN4lON$: INCHE
ASSENBLY
DRAWN BY: DAVID L. HARRIS
TOLERANCES:
.KK ± -l
.ANN
b
.00l
FRACTIONS ±
ANGLES h
qITY 111D
DAE:; 21 MAR 2005
SCALE; 0.400
SIZE: A
PART NAME LOWER SMALL PROBE PLATElPART No: PBD-OD2-004
REV- a
220
Appendix D - Photos
Fig. D. 1. Bending Mechanism.
222
Fig. D.2. Bending mechanism gear train.
223
Fig. D.3. Bottom Plate, Part No. PBD-001-001.
224
Fig. D.4. Top Plate, Part No. PBD-001-002.
225
Fig. D.5. Torque Gear A & B, Part No. PBD-001-003 & PBD-001-004.
226
yI
D1
Fig. D.6. Drive Shaft, Part No. PBD-001-005.
Fig. D.7. Input Shaft, Part No. PBD-001-006.
016
227
iM
1111'11
01
Fig. D.8. Torque Arm 153, Part No. PBD-001-007.
1
9
8
a
Fig. D.9. Front View, Support Beam 157, Part No. PBD-001-017.
fl
OT
~
II
L.
228
80
Fig. D.10. Back View, Support Beam 157, Part No. PBD-001-017.
Fig. D. 11. Machining Support Beam 157.
9
229
Fig. D.12. Beam Clamp C, Part No. PBD-001-011.
Fig. D.13. Beam Clamp D, Part No. PBD-001-012.
230
Fig. D.14. Top portion of Probe.
231
Fig. D.15. Probe prepared for testing.
232
Fig. D. 16. Flange Plate, Part No. PBD-002-001.
Fig. D.17. Flange Insulating Plate, Part No. PBD-002-005.
233
Fig. D. 18. Large Probe Plate, Part No. PBD-002-002.
Fig. D. 19. Upper Small Probe Plate, Part No. PBD-002-003.
234
Fig. D.20. Lower Small Probe Plate, Part No. PBD-002-004.
Fig. D.21. Bending Mechanism Insulating Plate, Part No. PBD-002-01 1.
Appendix E - Strand Heat Treatment
1.0 Sample Holder Preparation
Holders:
(2) Ti6Al4V fixtures with 5.953" section and fixture caps
(1) Ti6A14V fixture with 6.072" section and fixture cap
Name Tags:
"IGC"and "European"
2.0 Test Wires
Wire: ITER IGC Billet #B6770-1 (MIT 97-6)
ENEA OST Type 1, Billet #7567
3.0 Wire Preparation
Cut wires
a. For each wire = Tail 30" x 2 + (6" + 3.8") x 6 = 119"
b. Cut 119" long wire from each spool and put the name tag.
c. Loop each wire in 4" diameter.
Remove Cr-plating
a. Remove Cr from the wires by etching with HCl (no diluting) in an ultrasonic bath
(about 3 min).
b. Rinse thoroughly with water and then with 100% ethylalcohol and dry.
4.0 Mount Samples in Heat Treatment Fixture
a. Mount wire on heat treatment fixture. Keep 30" long tail from each end.
b. Pinch each end a few times
c. Store the sample in the plastic bag.
5.0 Sample Positioning in Furnace Holder
SUPERCONDUCTING
811WIRE
811
3 6"
5.5"
STAI NLESS STEEL RODS
TEST SA MPLES
CENTER OF F URNECE
TL
S
236
a. Position all samples corresponding to furnace centerline in the holder.
b. Wrap the holder with stainless steel tool wrap foil carefully. Gas feeding tube end should be
kept in the wrapping foil.
c. The gas outlet tube on the furnace flange should be upper (at 12 o'clock).
6.0 Sample Heat Treatment Schedule
IGC Heat Treatment Schedule
Ramp rate 6 0C/hour to 185'C and hold for 20 hours
Ramp rate 6 0C/hour to 350'C and hold for 3 hours
Ramp rate 6 0C/hour to 460'C and hold for 25 hours
Ramp rate 6VC/hour to 570'C and hold for 220 hours
Ramp rate 6 0C/hour to 650'C and hold for 175 hours
Ramp down 25 0 C/hour
Total Time 23 days, 21:36:10
ENEA OST Heat Treatment Schedule
Ramp rate 6VC/hour to 210 C and hold for 50 hours
Ramp rate 6VC/hour to 340'C and hold for 25 hours
Ramp rate 6VC/hour to 450'C and hold for 25 hours
Ramp rate 6VC/hour to 575'C and hold for 100 hours
Ramp rate 6VC/hour to 660'C and hold for 100 hours
Ramp down 25*C/hour
Total Time 18 days, 0:16:10
237
Fig. E. 1. Furnace for heat treating IGC samples.
Fig. E.2. Furnace for heat treating OST samples.
238
Fig. E.3. Sample heat treatment fixture made from Ti6Al4V.
Fig. E.4. Heat treatment fixture and cap coated with Graphokote to prevent sintering.
Fig. E.5. Grooves machined in sample heat treatment fixture.
239
Fig. E.6. Heat treatment fixture after removing from furnace.
Fig. E.7. Samples after heat treatment.
240
Fig. E.8. Samples are one continuous strand.
Fig. E.9. Removing samples from fixture.
Appendix F - Critical Current Test Results
This appendix lists the test measurements for the bend tests. The tables present the data in the
order in which it was taken. If a field in the table is left blank it means that measurements were
made but no results could be determined from the data. This could be because the noise level
was too high or the sample quenched before the electric field criteria was reached.
The critical current was measured at an electric field level that was appropriate for short samples.
Ec = 2 pV/cm
Critical current criterion:
The n-values were calculated using equation F.1. Two different n-values were determined using
different electric field criterion. This was done because many of the samples quenched soon
after they had reached the critical current criterion and measurement data was not available for
the preferred n2 points.
n L: E = 3.5pV/cm with corresponding current
n2: E = 7.1 pV/cm with corresponding current
-=
EC
(F.1)
IC
Table Nomenclature
Ic = Critical Current
Q = Quench Event
H = High noise in data acquisition
M = Medium noise in data acquisition
L = Low noise in data acquisition
Table F. 1. Test sample voltage tap separation distances (inches).
Sample IGC153 IGC157 EU153
1
4.176
4.466
4.162
2
4.211
4.421
4.161
3
4.183
4.351
4.145
242
Table F.2. Test data for IGC 157, Sample #1.
IGC157
#1
Test
Number
Strain
(%)
Current
(A)
IGC157.002
IGC157.008
IGC157.010
IGC157.016
IGC157.017
IGC157.021
IGC157.024
0.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
0.3
0.2
0.1
0.0
IGC157.025
IGC157.029
IGC157.031
IGC157.034
IGC157.035
IGC157.038
IGC157.041
IGC157.042
IGC157.045
IGC157.046
IGC157.047
IGC157.050
IGC157.052
Type
nvaluel
nvalue2
21
41
112
78
104
96
90
79
13
77
89
97
103
73
94
Ic-L
Ic-L
Ic-M
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-H
Ic-H
7.39
12.08
11.03
11.5
12.25
6.07
6.04
5.77
4.88
5.32
5.18
6.48
6.87
10.79
5.2
8.45
12.18
103
106
Ic-L
Ic-L
6.21
6.38
13.64
11.16
8.23
6.72
3.25
5.81
6.37
7.86
9.33
9.04
6.29
243
Table F.3. Test data for IGC 157, Sample #2.
IGC157
#2
nvaluel
nvalue2
17.9
14.6
22.3
11.4
6.9
2.0
5.0
5.0
5.2
5.5
6.7
11.8
7.5
2.2
5.1
5.6
6.0
6.5
10.6
Ic-M
Ic-M
7.2
5.6
7.5
6.0
nvalue1
nvalue2
12.1
9.7
10.0
10.0
Test
Number
Strain
(%)
Current
(A)
Type
IGC157.003
IGC157.011
IGC157.015
IGC157.020
IGC157.022
IGC157.023
IGC157.026
IGC157.027
IGC157.032
IGC157.033
IGC157.036
IGC157.037
IGC157.040
IGC157.043
IGC157.044
IGC157.048
IGC157.049
IGC157.053
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
0.2
0.1
0.0
55
114
108
121
115
97
56
7
52
72
89
96
82
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-M
97
101
Table F.4. Test data for IGC 157, Sample #3.
IGC157
#3
Test
Number
Strain
(%)
Current
(A)
Type
IGC157.004
IGC157.012
0.0
0.1
0.2
59
75
94
Ic-L
Ic-M
Ic-L
IGC157.013
244
Table F.5. Test data for EU 153, Sample #1.
EU153
#1
Test
Number
Strain
(%)
Current
(A)
EU153.006
EU153.012
EU153.013
EU153.014
EU153.020
EU153.021
EU153.026
EU153.027
EU153.033
EU153.034
EU153.039
EU153.040
EU153.045
EU153.047
EU153.056
EU153.057
0
0.1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
91
104
114
146
105
144
100
98
60
60
61
64
65
65
65
67
Type
nvalue 1
nvalue2
4.6
5.3
5.5
5.1
5.5
5.5
5.1
4.9
5.6
6.1
5.9
6.4
6.5
5.8
6.3
6.3
Q-H
Q-H
Q-H
Q-L
Q-L
Q-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-M
Ic-M
Ic-H
245
Table F.6. Test data for EU 153, Sample #2.
EU153
#2
Test
Number
Strain
(%)
Current
(A)
EU153.007
EU153.011
EU153.015
EU153.019
EU153.022
EU153.025
EU153.028
EU153.032
EU153.035
EU153.038
EU153.041
EU153.044
EU153.048
EU153.055
EU153.058
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
91
139
157
148
149
154
125
57
70
88
103
112
117
116
118
Type
nvaluel
nvalue2
17.7
9.1
3.1
3.3
3.9
5.1
4.5
4.4
3.6
4.2
9.0
3.3
3.4
4.0
5.0
4.4
4.4
4.1
4.6
Q-M
Q-L
Q-L
Q-L
Q-M
Ic-H
Ic-H
Ic-L
Ic-L
Ic-L
Ic-L
Ic-L
Ic-M
Ic-L
Ic-M
246
Table F.7. Test data for EU 153, Sample #3.
EU153
#3
Test
Number
Strain
(%)
Current
(A)
Type
EU153.008
EU153.009
EU153.017
EU153.018
EU153.023
EU153.024
EU153.029
EU153.030
EU153.036
EU153.037
EU153.042
EU153.043
EU153.049
EU153.050
EU153.051
EU153.052
EU153.053
EU153.054
EU153.059
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.6
0.5
0.4
0.3
0.2
0.5
0.2
0.2
0.2
0.1
0
70
Q-H
125
100
117
102
111
72
45
46
48
49
50
Q-M
49
54
43
43
52
52
nvaluel
nvalue2
Q-L
Ic-L
Ic-L
Ic-L
Ic-M
Ic-M
Ic-L
Ic-M
7.3
3.2
5.3
4.9
3.8
3.7
10.2
3.8
4.2
4.2
3.8
4.0
Ic-L
Ic-H
4.3
N/A
4.1
N/A
Ic-H
Ic-H
Ic-H
Ic-H
3.1
6.0
3.7
6.3
3.4
4.2
4.4
4.4
Q-L
Q-L
References
Chapter 1
[1.1]
Y. Iwasa, Case Studies in Superconducting Magnets Design and Operational Issues, 2nd
edition, Springer-Verlag, New York, 2005 (draft).
[1.2]
J.V. Minervini, "Analysis of loss mechanisms in superconducting windings for rotating
electric generators", Thesis (Ph.D.), Massachusetts Institute of Technology, Dept. of
Mechanical Engineering, 1981.
[1.3]
Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 7A, p5,12.
[1.4]
U. Essmann and H. Trauble, "The direct observation of individual flux lines in type II
superconductors", Physics Letters, v.24A, 1967, p.526.
[1.5]
University of Wisconsin Applied Superconductivity Center website,
http://www.asc.wisc.edu/plot/plot.htm, accessed July 2205.
[1.6]
Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6A, p11.
[1.7]
Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6A, p12.
[1.8]
Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 7B p10.
[1.9]
Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 7B p15.
[1.10] Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6A, p22,26.
248
[1.11] Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6A, p26.
[1.12] Courtesy P. Lee, University of Wisconsin Applied Superconductivity Center.
[1.13] Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6A, p27.
[1.14] Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6A, p23.
[1.15] Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6B, p16.
[1.16] Y. Iwasa, J.V. Minervini, "Superconducting Magnets", Course 2.64J, Lecture Notes,
Massachusetts Institute of Technology, Dept. of Mechanical Engineering, Spring 2005,
Lecture 6B, p27.
[1.17] M.O. Hoenig, Y. Iwasa, D.B. Montgomery, "Supercritical helium cooled "Bundle
Conductors" and their applications to large superconducting magnets," Proc. 5t Inter.
Conf. on Magn.Tech., (MT-5) Rome, 1975.
[1.18] Courtesy Dr. J.V. Minervini, Plasma Science and Fusion Center, Massachusetts Institute
of Technology.
[1.19] Montage created by P. Lee, University of Wisconsin Applied Superconductivity Center.
[1.20] ITER website, http://www.iter.org, accessed June 2005.
[1.21] E. Buehler and H. J. Levinstein, "Effect of tensile stress on the transition temperature and
current-carrying capacity of Nb3Sn", Journal of Applied Physics, v 36, n 12, Dec. 1965,
p 3856-3860.
[1.22] J.W. Ekin, "Strain scaling law for flux pinning in practical superconductors. I. Basic
relationship and application to Nb/sub 3/Sn conductors", Cryogenics, v 20, n 11, Nov.
1980, p 611-24.
[1.23] J.W. Ekin, "Strain scaling law and the prediction of uniaxial and bending strain effects in
multifilamentary superconductors", Filamentary Al 5 Superconductors. Proceedings of
the Topical Conference on Al5 Superconductors, 1980, p 187-203.
249
[1.24] L.T. Summers, J.C. McKinnell, S.L. Bray, and J.W. Ekin, "Characterization of
multifilamentary Nb3 Sn superconducting wires for use in the 45-T hybrid magnet", IEEE
Transactions on Applied Superconductivity, v5, n2, pt.2, June 1995, p 1764-7.
[1.25] D. Uglietti, B. Seeber, V. Abacherli, N. Banno, and R. Flkiger, "Critical current vs.
strain for LTS wires up to 21T", IEEE Transactions on Applied Superconductivity, v.15,
n2, June 2005, p 3652-3655.
[1.26] H.J.N. van Eck, D.C. van der Laan, M Dhalle, B. ten Haken, and H.H.J tenKate, "Critical
current versus strain research at the University of Twente", Superconductor Science and
Technology, v16, n9, Sept. 2003, p. 10 2 6- 10 3 0 .
[1.27] A. Godeke, M. Dhalle, A. Morelli, L. Stobbelaar, H. van Weeren, H. J. N. van Eck,
W. Abbas, A. Nijhuis, A. den Ouden, and B. ten Haken, "A device to investigate the axial
strain dependence of the critical current density in superconductors", Review of Scientific
Instruments, v75, n12, Dec. 2004, p 5112-5118.
[1.28] C.R. Walters, I.M. Davidson, G.E. Tuck, "Long sample high sensitivity critical current
measurements under strain", Cryogenics, v26, n7, July 1986, p 406-12.
[1.29] N. Cheggour and D.P. Hampshire, "A probe for Investigating the effects of temperature,
strain, and magnetic field on transport critical currents in superconducting wires and
tapes", Review of Scientific Instruments, v71, n12, Dec. 2000, p 4521-4530.
[1.30] D.M.J. Taylor and D.P. Hampshire, "Effect of axial strain cycling on the critical current
density and n-value of ITER niobium-tin wires", Physica C, v401, nl-4, 15 Jan. 2004, p
40-6.
[1.31] D. Uglietti, B. Seeber, V. Abacherli, M. Thoner, and R. FhIkiger, "Critical Current vs.
Strain Measurements of Long Length Nb3 Sn Wires up to 1 OGGA and 17T using a
modified Walters Spring", IEEE Transactions on Applied Superconductivity, v.13, n2,
June 2003, p 3544-3547.
[1.32] D. Uglietti, B. Seeber, V. Abacherli, A. Pollini, D. Eckert, R. Flukiger, "A device for
critical current vs. strain measurements up to 1 OOOA and 17T on 80cm long HTS and
LTS technical superconductors" Superconductor Science and Technology, v16, n9, Sept.
2003, p 1000-1004.
[1.33] L.T. Summers, M.W. Guinan, J.R. Miller, P.A. Hahn, "A Model for the Prediction of
Nb3Sn Critical Current as a Function of Field Temperature, Strain, and Radiation
Damage", IEEE Transactions on Magnetics, v27, n2, pt III, Mar. 1991, p 2041-2044.
250
[1.34] A. Godeke, B. ten Haken, H.H.J. ten Kate, "Scaling of the critical current in ITER type
niobium-tin superconductors in relation to the applied field, temperature and uni-axial
applied strain", IEEE Transactions on Applied Superconductivity, v.9, n2, June 1999, p
161-164.
[1.35] S.A Keys and D.P. Hampshire, "A scaling law for the critical current density of weaklyand strongly-coupled superconductors, used to parameterize data from a technological
Nb 3Sn strand", Superconductor Science and Technology, v16, n9, Sept. 2003, p 1097108.
[1.36] N. Cheggour and D.P Hampshire, "The unified strain and temperature scaling law for the
pinning force density of bronze-route Nb 3Sn wires in high magnetic fields", Cryogenics,
v42, n5, May 2002, p 299-309.
[1.37] From Appendix A10.2, Expt'l Techniques in Low Temp. Measurements, Oxford Univ.
Press, 2005.
[1.38] J.W. Ekin, "Effect of transverse compressive stress on the critical current and upper
critical field of Nb 3Sn", Journal of Applied Physics, v62, n12, 15 Dec. 1987, p 4829-34.
[1.39] W.A.J. Wessel, A. Nijhuis, Y. Ilyin, W. Abbas, B. ten Haken, and H.H.J. ten Kate, "A
novel 'test arrangement for strain influence on strands' (TARSIS): mechanical and
electrical testing of ITER Nb 3Sn strands", AIP Conference Proceedings, n71 1, pt.2, 2004,
p 466-73.
[1.40] B. J. Senkowicz, M. Takayasu, P.J. Lee, J.V. Minervini, D.C. Larbalestier, "Effects of
bending on cracking and critical current of Nb 3Sn ITER wires", IEEE Transactions on
Applied Superconductivity, vI5, n2, pt. Im, June, 2005, p 3470-3473.
[1.41] Courtesy Dr. M. Takayasu, Plasma Science and Fusion Center, Massachusetts Institute of
Technology.
[1.42] W. Goldacker, S.I. Schlachter, R. Nast, H. Reiner, S. Zimmer, H. Kiesel, A. Nyilas
"Bending strain investigations on BSCCO(2223) tapes at 77K applying a new bending
technique", AIP Conference Proceedings, n614B, 2002, p 469-76.
[1.43] National High Magnetic Field Laboratory website, http://www.magnet.fsu.edu, accessed
June 2005.
251
Chapter 2
[2.1]
J.M. Gere, Mechanics of Materials, 5th edition, Brooks/Cole, Pacific Grove, CA, 2001, p
316-323.
[2.2]
T.B. Zineb, A. Sedrakian, J.L. Billoet, "An original pure bending device with large
displacements and rotations for static and fatigue tests of composite structures"
Composites Part B (Engineering), v34B, n5, 2003, p 447-58
[2.3]
W. Goldacker, S.I. Schlachter, R. Nast, H. Reiner, S. Zimmer, H. Kiesel, A. Nyilas
"Bending strain investigations on BSCCO(2223) tapes at 77K applying a new bending
technique", AIP Conference Proceedings, n614B, 2002, p 469-76.
Chapter 3
[3.1]
National High Magnetic Field Laboratory website, http://www.magnet.fsu.edu, accessed
June 2005.
[3.2]
OST test data courtesy Dr. L. Muzzi, ENEA, Frascati Research Centre
[3.3]
W.F. Brown, H. Mindlin, C.Y. Ho, Aerospace Structural Metals Handbook,
CINDA/USAF CRDA Handbooks Operation, Purdue University, 1993 edition.
[3.4]
D. Uglietti, B. Seeber, V. Abacherli, A. Pollini, D. Eckert, R. Flukiger, "A device for
critical current vs. strain measurements up to 1 OOOA and 17T on 80cm long HTS and
LTS technical superconductors" Superconductor Science and Technology, v16, n9, Sept.
2003, p 1000-1004.
[3.5]
Private communication with Dr. M. Takayasu, Plasma Science and Fusion Center,
Massachusetts Institute of Technology, Dec 2004.
[3.6]
D.W. Dudley, Handbook of Practical Gear Design, revised edition of Practical Gear
Design, McGraw-Hill, New York, 1984.
[3.7]
E. Oberg, et al, Machinery's Handbook,
[3.8]
Ball Aerospace website, www.ballaerospace.com/vackotedry.html, accessed June 2005.
[3.9]
Brycoat website, www.brycoat. com/WS2/ws2prop.html, accessed June 2005.
2 5 th
edition, Industrial Press, New York, 1996.
[3.10] Test data courtesy of Dr. M. Takaysu, Plasma Science and Fusion Center, Massachusetts
Institute of Technology.
252
Chapter 4
[4.1]
W. Goldacker, S.I. Schlachter, R. Nast, H. Reiner, S. Zimmer, H. Kiesel, A. Nyilas
"Bending strain investigations on BSCCO(2223) tapes at 77K applying a new bending
technique", AIP Conference Proceedings, n614B, 2002, p 469-76.
[4.2]
R.S. Figliola and D.E. Beasley, Theory and Design for Mechanical Measurements,
edition, John Wiley & Sons Inc., New York, 2000.
3r
Appendices
[A. 1] Shigley, J. E. and C. R. Mischke, Mechanical Engineering Design, 6h edition, McGrawHill, New York, 2001, p 1181-1186.
[B.1] E. Oberg, et al, Machinery's Handbook 25h edition, Industrial Press, New York, 1996.
[B.2]
Shigley, J. E. and C. R. Mischke, Mechanical Engineering Design, 6 th edition, McGrawHill, New York, 2001, p 1181-1186.
[B.3] D.W. Dudley, Handbook of Practical Gear Design, revised edition of Practical Gear
Design, McGraw-Hill, New York, 1984.
[B.4] D.W. Dudley, Practical Gear Design, 1"edition, McGraw-Hill, New York, 1954.