Department of Mechanical Engineering HEAT POST
advertisement

HEAT TRANSFER TO IMPACTING DROPS AND
POST CRITICAL HEAT FLUX DISPERSED FLOW
Gail E. Kendall
Warren M. Rohsenow
Report No. 85694-100
Contract No. NSF Grant ENG 76-82564
Heat Transfer Laboratory
Department of Mechanical Engineering
Massachusetts Institute of Technology
Cambridge, Massachusetts
March 1978
ENGINEERING
.NGINEERING
IGINEERING
INEERING
NEERING
'EERING
ERING
RING
PROJECTS
PROJECTS
PROJECTS
PROJECTS
PROJECTS
PROJECTS
PROJECTS
PROJECTS
LABORATORY
LABORATOR
LABORATO'
LABORAT'
LABORA
LABOR
LABO'
LAB'
INGPROJECTSLA4G PROJECTS L
PROJECTS
PROJECTF
ROJEC)JEr
02139
I -EN111101",
- 1 -
TECHNICAL REPORT NO. 85694-100
HEAT TRANSFER TO IMPACTING DROPS
AND POST CRITICAL HEAT FLUX DISPERSED FLOW
by
Gail E. Kendall
Warren M. Rohsenow
Sponsored by
National Science Foundation
Contract No. NSF Grant ENG 76-82564
D.S.R. Project No. 85694
March 1978
Department of Mechanical Engineering
Massachusetts Institute of Technology
Cambridge, Massachusetts 02139
- 2 -
ABSTRACT
Heat transfer to drops impacting on a hot surface is examined in
context of dispersions of flowing, boiling fluids.
The liquid contri-
bution to heat transfer from a hot tube to a two-phase dispersion is
formulated in terms of heat transfer contributions due to surface impacts of individual drops.
High heat transfer rates are associated with
liquid wetting of the surface at surface temperatures between saturation
and the minimum stable film boiling (transition) temperature.
Low heat
transfer rates are associated with non-wetting, or dry, impacts at
surface temperatures above the transition temperature.
In the wetting region, experimental measurements of heat transfer
rates to sparse streams of drops impacting on a hot surface showed
complete evaporation of the drops.
In the non-wetting region, an analysis of impact dynamics and heat
transfer for deformable drops was performed using simple, idealized shapes
to model the deformation.
Lagrangian methods were used to derive equations
of motion and deformation for impacting drops.
Resulsts compare well
with available information on drop dynamics and heat transfer.
The analysis of heat transfer to impacting drops was formulated
for incorporation into dispersed flow analysis, given the statistical
distribution of drops in the dispersion.
Applications include the pre-
diction of local heat transfer and vapor generation rates.
The liquid
contribution to dispersed flow heat transfer must be included for the
prediction of rewet in nonuniformly heated tubes.
- 3 ACKNOWLEDGEMENTS
The authors wish to express their than ks to Professors
Peter Griffith, Bora Mikid, and Hank Paynter , and Mr. Grady
Yoder, for their careful discussions, sugges tions, and review
of this work.
Technical assistance was prov ided by Mr.
Fred
Johnson and Mr. Dave Hart; typing by Ms. Gis ela Ri nner, Ms.
Leslie Regan, and Ms. Joan Gillis; drafting by Mr.
Arthur
Giordani; and filming with the help of Mr. Ben Hal prin, Dr.
Harold Edgerton, and Mr. Charlie Miller.
is sincerely appreciated.
Their as sistance
- 4 -
This research was supported by the National Science Foundation.
- 5 CONTENTS
Abstract
Acknowledgements
Lists of Figures
Lists of Tables
Nomencl ature
1
INTRODUCTION
Heat Transfer in Two Phase Flow Systems:
Flow Regimes
Review of Related Work
Scope: Liquid Contribution to Dispersed
Flow Heat Transfer
2
PROBLEM FORMULATION:
TRANSFER
Flow Boiling Heat
DISPERSED FLOW HEAT
Transfer
Dispersed Flow Structure
Total Heat Transfer: A Sum of Contributions
Knowns and Unknowns
3
EXPERIMENTAL DESIGN:
IMPACTING DROPS
HEAT TRANSFER
Dispersed Flow Conditions and System Design
Liquid Supply System
Drop Generation and Charging System
Page
Heat Transfer Target System
65
Temperature and Heat Transfer
Interpretation System
67
Independently Selected Parameters
and System Checks
Measurement Technique
Data Processing
4
5
HEAT TRANSFER DATA AND
INTERPRETATION
Drop Heat Transfer Measurements: Some
Observations
79
Drop Heat Transfer Effectiveness Data
84
The Effect of Entrained Air at H gh Superheat
91
ANALYSIS OF DYNAMICS AND HEAT TRANSFER
IMPACTING DROPS
Background and Previous Efforts
Drop Dynamics
Constraints and Equations of Motion
Boundary Conditions
External Force in Drop Motion Near a
Plane Surface
Evaporation and Heat Transfer Effectiv eness:
Dry Impact
Nondimensional Equations
Dynamics of Dry Impacts: Model and Dat a
126
-
1
Page
A Simplified Model:
Transfer
6
7
Dry Collision Heat
170
Heat Transfer with Surface Wetting
175
Surface Wetting Tra nsition Temperature
183
LIQUID DROP CONTRIBUTION TO DISPERSED FLOW
HEAT TRANSFER
186
Distribution Functions for the Dispersed Phase
187
Incorporation of Drop Heat Transfer
Effectiveness
191
The Role of Drop Heat Transfer in Dispersed
Flow Analysis
193
CONCLUDING REMARKS
195
Summary
195
Conclusions
197
Recommendations
199
REFERENCES
200
APPENDICES
A3 CIRCUITRY
206
A4 DATA SUMMARY
211
-
-
.
!
%4
4
pmq-"-
o--
-
8 Page
A5 DETAILS OF DROP DYNAMICS ANALYSIS
Equations of Motion for Drop Models
232
232
Dynamic Scaling Functions for Two Drop
Shapes
-
237
Integration of Velocity Profile Function
244
Nonlinear Temperature Profile
246
Temperature Correction for Vapor Density
251
Property Data
252
Maximum Pressure Rise and Reynolds Number
in the External Flow
254
Maximum Extension Radius, Cylindrical Model
256
IMMI.,
-
9 -
LIST OF FIGURES
Figure
1-1
Steady, Heated Two Phase Flow
2-1
Boiling Curve
2-2
Flow Structure
2-3
Drop Heat Transfer Effectiveness
and Target Superheat
3-1
Drop Heat Transfer Experiment
Schematic
3-2
Liquid Supply System
3-3
Target Assembly
4-1
Drop Heat Transfer Effectivness Data
Summary
4-2
Drop Heat Transfer Effectiveness for
Two Target Materials
4-3
Drop Heat Transfer Effectiveness wi th
Liquid Subcooling
4-4
Drop Heat Transfer Effectiveness:
Transition
4-5
Target Heat Transfer and Weber Number
5-1
Cylindrical Model of Drop
Position
- Equilibrium
Cylindrical Model of Drop
Position
- Deformed.
5-2
62
107
108
5-3
Truncated Sphere Model of Drop
112
5-4
Steady Axisymmetr ic Laminar Flow between
Parallel Disks
127
-
10
-
Fi qure
Page
5-5
Free Drop Oscillation Period
146
5-6
Drop Impact Period
147
5-7
Maximum Drop Extensio n
148
5-8
Minimum Drop - Wall
Separation vs.
151
Weber Number
5-9
Minimum Drop - Wall
Separation vs.
Wall Superheat
5-10
Maximum External Forc e
5-11
Maximum Vapor - Flow Reynolds Number
5-1
Drop Thickness Duri ng Impact
5-1
Drop Bottom Radius During Impact
5-1
Drop - Wall Separat ion During Impact
5-1
External Force Duri ng Impact
5-1
Heat Transfer Rate During Impact
5-1
Drop Bottom Radius Profiles for Three
Shapes
162
Drop Bottom Radius Profiles for Two
Weber Numbers
163
Radial Dimension During Impact: Model
and Data
164
Dry Impact Heat Transfer Effectiveness
vs. Weber Number
167
Dry Impact Heat Transfer Effectiveness
vs. Wall Superheat
168
5-18
5-19
5-20
5-21
~Il'
-
11
-
Fi gure
5-22
Dry Impact Heat Transfer Effectiveness:
Model and Data
169
Simplified Drop Heat Transfer
Effectiveness vs Weber Number
173
Simplified Drop Heat Transfer
Effectiveness vs Wall Superheat
174
5-25
Nucleation and Evaporation Times
178
5-26
Initial Nucleation Buble Size
179
5-27
Bubble Growth in Nonuniform
Temperature Field
180
5-28
Instability in Phase Transition
184
A3-1
Pulse Selection Circuit Schematic
207
A3-2
Pulse Selection Circuit Signals
208
A3-3
Drop Charge Vol tage Switching Circuit
Schematic
209
Drop Charge Vol tage Switching Circuit
Signals
210
Effect of Superheat on Temperature
Profile Coefficients
250
5-23
5-24
A3-4
A5-1
-
12
-
LIST OF TABLES
Table
Page
3-1
Data Interpretation: Sample Calculation
5-1
Dynamic Scaling Functiona for Two Shapes
115
5-2
Dimensionless Dynamic
Groups
138
Variables and
Characteristic Dimensionless Groups
and Parameter Ratios
141
A4-1
Data Summary
212
A5-1 -
Property Units Conversion Factors
252
A5-2
Property Data
253
5-3
-
13 -
NOMENCLATURE
Symbol s
drop diameter
area
(m)
(m )
bubble radius
(m)
tube diameter
(m)
specific heat
(J/kg-C)
constant
differential
drop spacing
(m)
electric potential
mechanical energy
frequency
force
(V)
(J)
(1/s)
(kg-m/s2 )
mass flux
(kg/s-m )
specific enthalphy
(J/kg)
integral constant
thermal conductivity
(J/s-m-C)
kinetic energy scaling function
kinetic energy
(J)
potential energy scaling function
drop charging selection
-
14 -
M
center of mass position scaling function
n
number density
N
drop bottom radius scaling function
p
distribution function
P
pressure
PE
potential energy
q
heat per unit area
Q
heat
r
radial coordinate
R
radius
S
slip ratio
t
time
T
temperature
U
velocity
v
specific volume
V
volume
W
mass flow rate
x
dummy variable
X
thermodynamic quality
y
drop-wall
z
axial coordinate
z
momentum flow
(1/m3 )
(kg/m-s 2 )
(J)
(J/m2)
(J)
(m)
(m)
(s)
(K or C)
(m/s)
(m3/ kg)
(m3 )
(kg/s)
separation
(m)
(m)
(kg-m /s2)
hi
15
-
-
Greek and Other Symbols
a.
void fraction
coefficient
Y
boundary layer thickness
6
virtual change
E
effectiveness
roughness
(m)
e
angle
X
geometric length
viscosity
(m)
(m)
(kg/s-m)
iT
2 [arcsine (1)]
p
mass density
a
surface tension
(kg/rm 3
(kg/s 2)
sum
-r
impact period
(s)
electrical resistance
(2)
friction factor
partial differential
---
! 11-- -
--
0"Q""
ronI
P-
-
Subscripts
a
diameter
c
characteristic
cm
center of mass
cr
critical
e
equilibrium
f
liquid
g
vapor
i
interface
L
laminar
max
maximum
min
minimum
0
initial
p
pressure
r
radial
s
saturated
u
velocity
v
volume
w
wall
z
axial
frictional
perpendicular
16 -
M
-
17 -
Superscripts
(above a variable) indicates the time derivative
the variable:
g
(above a variable)
variable:
=
it
indicates the time average of the
f g dt
0
T
(above and to the right of a function) indicates the
derivative of the function with respect to its argument:
g (x)
-dx
(above and to the right of a function) indicates
weighted average of the function with respect to
distribution (p) of one of its arguments:
f x m g(x)
p(x)
/ x m p(x)
-
18 -
Groups
AR
-
a
diameter ratio
T.
c
Tr
s )
-T
1
1/2
b
hf
P
(T
-
T
hfg
subcooling group
cpg (T - T )
hf g.
superheat group
yi
9
=
=
RE
P
9
C
k. '
Prandtl number
k
9
B
U
9
P9
RHO
bubble growth group
)
.
s-
PR
P f Cpf kf t
Reynolds number
density ratio (vapor-liquid)
Pf
Pq
RR
=
density ratio (vapor-saturated vapor)
9
Pg
,s
kfPfcp.f
1/2
thermal
k wp~c
k (T
T
TR
UR
-
=
- T s)
sT)
hfg
property ratio (liauid-solid)
1/2
p aa
g
conductivity group
- T
temperature ratio
WT
s
U
velocity ra t io
III
-
2
vi
p aa
-g9
p U a
WE
=--
19
-
1/2
viscosity group
Weber
number
-
20 -
Units
(metric)
C
degre es Celsius (temperature)
f
farad (electrical capacitance)
J
joule (energy)
K
degre es Kelvin (temperature)
kg
kilog ram (mass)
m
meter
s
secon d (time)
V
volt
2
ohm ( electrical resistance)
(length)
(electrical potential)
(British)
BTU
British Thermal Unit (energy)
F
degrees Fahrenheit (temperature)
ft
foot Clength)
hr
hour (time)
in
inch (length)
lbf
pound (force)
lbm
pound (mass)
Unit Prefixes
c
centi (10-2)
m
mili
p
micro (10-6)
(10-)
III
-
21
-
Unit Identities
j
=
kg-m2 /s
f
=
s/2
K
=
C + 273
=
BTU
778 ft-lbf
hr
3600 s
ft
=
12 in
=
2
=
2.51x10
0.3048 m
4
f
-t2-bm/s2
-
1055 J
-
22 -
Abbreviations
AECL
Atomic Energy of Canada Limi ted
AEE
(United Kingdom) Atomic Energy Establishment
AERE
(United Kingdom) Atomic Energy Research
Establishment
ANL
Argonne National Laborat ory
ASME
American Society of Mech anical Engineers
BNL
Brookhaven National Labo ratory
CNEN
Comitato Nazionale Energ ia Nucleare
CSChE
Canadian Society for Chem ical Engineering
CSME
Canadian Society for Mech anical Engineering
JSME
Japan Society of Mechani cal Engineers
MIT
Massachusetts Institute of Technology
NRC
(United States) Nuclear Regulatory Commission
UC
University of California
mllilillmllil
mill
HillIla
III
I]
-
1
23
-
INTRODUCTION
Heat Transfer in Two-Phase Flow Systems: Flow Regimes
Heat transfer in sys tems experiencing liquid-to-vapor
phase change is a governi ng factor in the design and use of
many types of equipment, especially those associated with
power generation and cool ing.
Convective boiling, in which
heat is transferred from hot flow channel walls to a flowing two-phase fluid is an effective method for continuous
heat removal.
T he quanti ty of heat exchange in convective
boiling is heavi ly depend ent on the geometric distribution
of the gas and 1iquid pha ses in the flow.
The concept of flow regime is used to describe the
different gas-li quid configurations in two-phase flows.
As heat is conti nuously added to a fl ui d undergoing phase
change, the flui d will experience a transition from mostly
liquid to mostly
vapor phase.
In this transition,the type and
sequence of flow regimes depe nds on the flow and boundary
conditions.
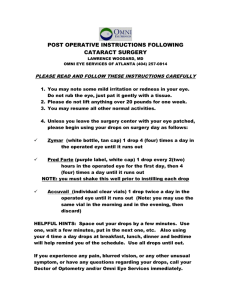
Som e typica 1 flo w regimes are depicted in
Figure 1-1.
Of parti cul ar in terest is the location at
which the liquid is no 1on ge r in direct contact with the
tube.
This is c alled th e dry out point.
on a heated wall
In general,
liquid
is asso ciate d wi th effecti ve heat transfer
at low temperatu re di fference s,
whil e vapor on a heated
wall is associated with less effective heat transfer,
requiring large temperature differences for heat removal.
-
24
-
(MOSTLY VAPOR)
B
INEFFECTIVE
HEAT TRANSFER
REQUIRES HIGH
WALL TEMPERATURE
POST CRITICAL
HEAT FLUX
DISPERSED FLOW
HEAT ADDITION
q(z) (J/s-m2)
DRYOUT
EFFECTIVE
HEAT TRANSFER
AT LOWI WALL
TEMPERATURE
CONSTANT MASS FLOW RATE
W (kg/s)
(MOSTLY IQUID)
Z
FIGURE 1-1 STEADY, HEATED TWO-PHASE FLOW
-
25
-
Thus hi gh tube temperatures are often found beyond the
dryo ut poi nt.
Post dryout temperatures in heated tubes
can be so high that the tube material may be in danger of
mel t ing.
Therefore heat transfer beyond the dryout point
is a subje ct of great interest, particularly in the field
of nucl ear reactor safety.
The dispersed flow regime consists of a continuous
vapor phase which carries with i
of liquid drops.
a fine disp ersion or mist
This flow regime virtually always exists
downstream of the dryout point and may persis t for appreciable lengths.
Because of therma 1 nonequili brium,
dis-
persed flow can exist even beyond the equilib rium quality
region: liquid drops can still be present whe n the bulk
vapor is superheated above the sat uration (bo iling) temperature.
The vapor volume fraction, or void fr action,
in
dispersed flow is usually high: ty pically gre ater than .95
but often closer to 1.0.
Because of the large difference
between the liquid and vapor densi ties, an appreci able
amount of liquid may be present in the flow ( for example,
half the mass) even though the voi d fraction is close to
one.
It is important that both the liquid and the vapor
phases be accounted for in heat transfer and flow development calculations for dispersed fl ows.
00 WIMP
WN
-
26
-
Review of Related Work
Heat
transfer in forced convection boiling is the
subject of many investi gations.
Typically, a single study
focuses on a particular flow regime,
that is,
a particular
geometric distribution of liquid and gas phases in the flow
channel.
In experimental
studies the flow regime is often
inferred from the heat transfer data: lower wal 1 temperatures in dicati ng wet
wall and higher indicating dry,
and
the calc ulated e qui 1ibrium vapo r mass fraction or quality
(determi ned from the average enthalpy of the flow)
indicat-
ing the relati ve propo rtions of liquid and vapo r present
in the flow.
Di ffi cul ties in i nterpretation of such data
arise for seve ral reas ons.
The calculated vapo r quality
is frequently differen t from th e
can appear wel 1 before the bulk
and liquid can exist
complete vapor ization.
well
flow
quality : bubbles
liquid reaches saturation
beyo nd the calculate d point of
The rel ative velocity o f the phases
(a phenomenon called s lip) cann ot be determined from heat
transfer data without making as sumptions about the flow
quality and either the relati
forces between the phases
or the depende nce of the heat
ransfer on phase velocity.
The effects of axi al conductii
are often unacc ounted for
in transient-type (nonsteady state) experiments.
Thus heat
flux and wall temperature measurements are often associated
-
27
-
with an approximation to the true flow conditions.
The
difference between the actual flow conditions and the
nferred
is not,
ondi ti ons depends on flow history in a way that
in general,
accounted for.
Analytical work in forced con vection boil ing must
deal with all the problems of data i nterpretati on and provide explanations for the observed sequence of flow regimes
and the associated heat transfer as well.
The standard
approach is the specification of a heat transfe r prediction
scheme for a given flow regime base d on those parameters
which describe that flow regime (ph ase ve locity, temperature,
etc.)
and a best guess as to when a particular flow
regime is encountered (based primar ily on experience under
matching conditions).
A number of predi c tion schemes
introduce a slip ratio, and a vapor mass
fraction X differ-
The dependence of the
ent from the equilibrium quality.
nonequilibrium quality and slip rat io on flow parameters
is sometimes inferred from data,
an d such correlations may
not be valid outside the data base.
One of the earlier approaches to di spersed flow heat
transfer analysis was presented by Dougal
et al. [1]I
(MIT)
as a limiting case: the heat transf er was assumed equal to
single phase vapor heat transfer at the same vapor velocity.
INumbers in brackets indicate numbered references listed
separately under REFERENCES.
-
28
In conjun ction with this, it
was usually assumed that there
was no sl ip between the phases, and that thermodynamic
equilibrium existed.
Laverty et al. [2] reported their
observation of the transition from annular to dispersed
flow, and formulated the two step heat transfer process:
step one, from wall to vapor, step two, from vapor to
drops.
This model allowed for both slip and thermal non-
equilibrium.
Forslund et al, [3] extended this analysis to
include droplet breakup and a wall-to-liquid heat transfer
term.
Hynek
et al. [4] further extended this work, includ-
ing additional effects such as twisted tapes in the tube.
Plummer et al. [5] introduced a simplified approach to
thermal non-equilibrium and a wall-to-liquid heat transfer
term.
Illoeje et al. [6] developed a detailed model for
heat transfer from the wall to liquid drops touching the
wall or in the boundary layer, attempting to predict the
minimum point on the boiling curve.
Ganic et al. [7]
calculated trajectories of liquid drops near the tube wall
in order to determine the rate of liquid deposition.
This
series of investigations at MIT was supported by concurrent
experimental investigations of heat transfer to upflowing
nitrogen in a uniformly heated tube.
The research dis-
cussed in this report is a continuation of the study of
post critical heat flux heat transfer at MIT.
Other research
in
dispersed flow heat transfer
-
29
-
provides important information in the forms of both
meas urements and modeling of the heat
transfer process.
detail ed photographic study of drop si z e and velocity
distributions in post
dryout dispers ed flows of Freon was
performed by Cumo et
1. [8, 9] of CNEN,
Rome.
A two-step
heat transfer model fir post-dryout, di s persed flow, similar to that deve loped by Laverty
et al.
was devel-
oped independent ly by Bennet et al. [10] of AERE,
Harwell,
Recently, new models have been presente d by Jones
et al. [11], and Saha et al. [12], of BNL
New York.
Vario us
aspects of dispe rsed flow heat transfer have been specifi
cally addressed by a number of investig ators.
-
The therma
nonequilibirum and phase velocity slip phenomena are
fundamental to a 11 of the two step heat transfer models.
A review of rese arch addressed to the q uestion of thermal
nonequilibrium i n heated two-phase flow is given by Jones
et al.LiJ1
. The question or phase velocity slip and phase
volume fraction is discussed by Butterworth [14] (AERE,
Harwell).
Groeneveld[15] (AECL,
Chalk River) gives an extensive
summary of data and heat transfer predictions for post
critical heat flux dispersed flow.
Most heat transfer analyses and correlations neglect
the liquid contribution to heat transfer at the tube wall
in post dryout dispersed flows.
however,
Several
investigations,
have been addressed specifically to this point.
-
30
-
Brevi et al. [16] and Cumo et al, [17] (CNEN, Rome)
attempted
to infer the liquid conbtri bution to heat transfer from
their data.
Harwel
al [18] (AERE,
Keeys
bserved
rewet following dry out in t ubes with cosine heat flux
distribution, indic ating th e importance of liquid heat
transfer.
Bailey [ 19] (AEE
, Winfrith) addressed some
comments to the cou nter-eff ects of underestimating total
heat transfer by ne gl ecting tube-to-liquid heat transfer,
and overestimating total heat transfer by assuming thermal
equilibrium resulti ng in an increased vapor velocity and
tube-to-vapor heat transfer
;
effects may be important.
Forslund,
his data suggested both
Illoeje, and Ganic
(MIT) each presen ted models or correlations for the liquid
contibution to heat transfe r in post dryout dispersed flow.
(Lehigh University,
Chen et al. [20]
NRC)
Pennsylvania,
for
presented a liquid dro p heat transfer model based on
Illoeje's work.
These mode ls are unsuccessful in predict-
ing what is known about hea t transfer from hot surfaces to
impacting drops in disperse d flow conditions.
Some useful informati on regarding the nature of the
solid-liquid heat
transfer process is obtained from
research on topic s related to but not primarily concerned
with post dryout dispersed flow.
cooling and surfa ce rewetti ng.
made to measure and
Two such areas are spray
Numerous attempts have been
model the surface heat transfer to
-
-
impacting drops.
31
011111111,111i
-
One of the recent works by Hall [21]
(Berkeley Nuclear Lab) concludes that the major cooling
effect in certain types of sprays is due to air entrainment
by the drops, which far exceeds the actual surface-to-drop
heat transfer.
A review of the rewet literature is con-
tained in a recent report by Elias et al. [22] (UC,
Berkeley).
The bulk of the analyses of the rewetting
phenomenon treat the surface temperature at the rewet front
as a constant determined by surface properties (both
thermal and surface finish) for the fluid in question.
The
conclusions of these research efforts, in addition to those
of dispersed flow boiling research, are reflected in this
study.
-
32
Scope: Liquid Contribution to Dispersed Flow Heat Transfer
The objective of research in post critical heat flux
heat transfer is the prediction of steady heat flux and
flow conditions beyond the dryou t point, based on an understanding of the importa nt physic al mechanisms controlling
heat transfer an d flow devel opme nt.
This study focuses on
a particular pos t dryout flow regime, dispersed flow, with
the goal of inve stigating the liquid contribution to the
total heat trans fer.
It is impo rtant to account properly
for the liquid contribution to heat transfer (frequently
omitted in post dryout heat tran sfer calculations) not only
for the predicti on of the total heat transfer to the flow,
but also for the prediction of the vapor generation rate
which determines the vapor cooli ng rate further downstream.
The scope of this work is outlined as follows:
1)
The fo rmulation of the dispersed flow heat trans-
fer problem,
2)
meas
based on local con ditions;
The design and cons truction of an apparatus to
re heat transfer to impa cting drops under conditions
si mu ati ng po st dryout disper sed flow;
3) The measurement of heat transfer to impacting
drops in the wetting region (where data are unavailable in
the literature) for the conditions of interest;
4)
The modeling of heat transfer to impacting drops
in the non-wetting region for the conditions of interest;
1,
-
5)
33
-
The incorporation of information on drop heat
transfer into the analysis of post dryout dispersed flow
heat transfer.
This outline is the framework for the presentation of the
results of this study.
-
2
34
-
PROBLEM FORMULATION: DISPERSED FLOW HEAT TRANSFER
Post dryout dispersed flow heat transfer analysis is
discussed in the framework of the complete flow boiling
system.
given.
Details of the structure of dispersed flow are
The flow structure suggests the separation of the
liquid and vapor contributions to the total heat transfer
from a hot tube to the dispersed flow.
The flow structure
also suggests the further breakdown of the liquid heat
transfer contribution to a sum of contributions due to
individual drop - surface interactions.
The heat transfer
associated with a single drop - surface interaction represents
a major unknown.
-
35
-
Flow Boiling Heat Transfer
Heat transf er to di spersed flow beyond dryout is usually encountered in the context of a complete flow boiling
system, in which several regimes are present.
The disper-
sed flow heat tra nsfer analysis is formulated in terms of
the local conditi ons (such as liquid and vapor temperatures,
velocities, and v olume fractions, and tube temperature).
But the local con ditions depend on a number of overall flow
parameters includ ing the mass flux and flow quality (vapor
flow mass fractio n), as well as the flow history.
A boiling c urve is the standard means of representing
heat transfer in two-phase systems in both flow and pool
boiling.
A boili ng curve is a plot of heat flux (J/s-m 2 )
vs. wall superhea t (wall temperature in excess of the saturation temperatur e,
C), constructed for a fixed set of
conditions, parti cularly for a fixed mass flux
and equilibrium quality
shown in Figure 2-1.
Xe .
G (kg/s-m )
A typical boiling curve is
Some important features of the curve
are: th e critical heat flux (CHF) or local maximum in the
curve; the trans ition region, or region of negative slope;
and the minimum heat flux or local minimum.
Not all boiling
curves exhibit t hese phenomena; in particular, some high
qual ity (mostly
vapor) boiling curves show no transition
CRITICAL
HEAT
FLUX
DRYOUT
LLJ
G
(kg/s-m 2 )
Xe
WALL SUPERHEAT, Tw-Ts (C)
FIGURE 2-1 BOILING CURVE
FIXED
Nil'J"
-
37
.
-
region, though there may be an inflection point.
In
general, however, the negative slope in a heat flux vs.
wall temperature plot is associ ated with two-phase heat
transfer.
Since boiling curves are constructed for fixed
quality, a single boil ing curve applies to only one location in a heated tube which corresponds to the local
quality.
As the quali ty changes (increases) with length,
other boiling curves are needed.
The local heat flux can
be deter mined from the local wall temperature, or vice
versa,
by locating the appropriate point on each boiling
Thus a set of boiling curves is needed to describe
curve.
the heat transfer in a finite length channel.
The local equili brium quality is determined from the
kno wn inlet condition and the heat addition along the leng th
of the t ube.
/s-m2)
If the heat addition per unit area is q (z)
(a function of the axial coordinate
a tube of diameter
(z) (J/kg)
B (m),
z
the local specific
the tube)
ow enthalpy
is :
h (z)
=
Lq 7 Bdz
W
(2-1 )
-
where
W (kg/s)
38
-
is the total mass flow rate.
bri urm quality
is defined as :
Xe
h (z)
Xe
The equili-
(z)
h
-
(2-2)
,
-
=
hfg
where
and
is the specific enthalphy of saturated liquid
hf
h
i s the latent heat of vaporization
(J/kg).
Note
Xe may be less than zero
(for subcooled liquid) or greate r than unity (for super-
that the equilibrium quality
heat ed vapor).
The
flow
quali ty
(the ratio of vapor
X
flow to the total flow) is alway s betwe en zero and one.
The local equilibrium qual ity
for
s
teady heating of a constant flow.
qual i ty and other related local
,
is easily evaluat ed
However, the flow
condi ti ons which depend on
the flow history are not easily determi ned.
Thermal non-
equi 1ibrium (superheated vapor in the presence of
1iquid) and phase velocity slip
(liquid velocity different
from vapor velocity) are usually presen t.
In post dryout
dispe rsed flow, the liquid is usually at the satur ation
tempe rature.
In this case the
vapor superheat
quality :
(T
- Ts)
flow
quality
X
and the
are related to the equilibrium
-
39
Xe - X
X
Note that
The slip
X < Xe
r a tio S
c
-T
(T
f
p
g
)
5
(2-3)
hfg
when the vapor is superheated.
is defined as :
U
(2-4)
Uf
where
U
and
Uf
are the mean axial vapor and liquid
velocities, respectively (m/s).
The local
vapor volume (void) fraction
the slip ratio and the
(1
-
flow
(1
a.)
pg
and
pf
Uf < Ug
X)
p
U
--
Qf
Uf
(2-5)
are the vapor and liquid densi ties
(kg/m
If
quality :
X
a
where
-
is related
a
3 ),
respectively.
(as in upflow), and
X < Xe
, then a
It is useful to express the phase velocities
in terms of the mass flux
fraction
a
U
G (kg/s-m2 ),quality
>
a,
e
and Uf
X, and void
:
GX
(2-6)
U
9
r P.
M IMI "Noloploll
p
aL
M-4
- Rm.-Q.--.'---"PF
R"
-
--
---
--
---
-
G(1
U
=
where the mass flux
flow
W (kg/s)
40
-
-
X)
G (kg/s-m 2 )
to the flow area
G
(2-7)
P f (1
is the ratio of the mass
A (m2)
=
(2-8)
If the thermal nonequi librium and phase vel oci ty slip are
known, the other local parameter descri bed in this paragraph
can be evaluated.
(For a discussion of these
relations
see e.g. [23]).
. ....
I...........
,
a"111M
i
A
-
'
-milli,
-
41
'k,INI
I,- ,,IWA
IuilmiliNilllmilolii
I"
-
Dispersed Flow Structure
Dispersed flow heat transfer is formulated in terms of
local flow con ditions characterized by local flow parameters
which reflect the
equilibrium.
deviation from thermal and velocity
Details concerning the actual structure of
the flow regim e are essential to the understanding of the
heat transfer process.
The structure of the nearly continuous vapor phase is
considered very similar to single phase vapor flow.
This
assumption is supported by the observati ons of Cumo et al.
[ 8] in post dryout, turbu lent dispersed flows of Freon,
in which the drop velocity profile match ed the single phase
velocity profile and the s lip
ratio was estimated to be one.
Soo et al.[24] showed mean gas velocity profiles in turbulent flow were- unchanged with the additi on of solid particles
(I0 to 250 ytm diameter).
Hutchinson et al. [25] used single
phase gas boundary layer thickness for turbulent flow to
predict deposition of drop s over a wide range of conditions.
Ganic et al.
[7],,in the analysis of dry wall dispersed
flow, used the boundary layer thickness used by Kirillov et al.
[26] for annular mist flow with a turbul ent vapor core(liquid film on wall).
This'boundary 1ayer, which Ganic
assumed to be laminar, is significantly larger than the
si
ngle phase laminar subla yer thickness.
[27] and Namie et al.
Both Gill et al.
[28], based their own observations
-
42
-
the marked difference in velocity profiles for dry wall
and annular mist flow, remarked that the increased boundary
layer thickness may be due to the liquid-gas intera cti on
Therefore it is considered in-
at the film interface.
appropriate for use in analysis of dry-wall dispers ed
flow.
The laminar sublayer thickness1
TL (
in
turbulent single phase flow in a tube is estimated as
a function of tube Reynolds number
~- 25
)
(RE
B
RE
:
8 75
(2-9)
g
and is plotted in Figure 2-2.
The laminar sublayer thickness in turbulent flow is
generally given by:
P9 U
YL
~
~
5
with
-
U
(2)
2
(friction velocity, m/s)
.079
and
(REg) 0. 25
(friction factor for
smooth tubes)
See, for example [29].
Turbulent flow in tubes is general ly found for Reynolds
numbers greater than about 104.
witiliAlwilildli,
-
43
BV
10~
B
IIA
hhI.,ILi
I1
-
H2 0,
frcr
= 0 .31
(1.25 cm ID)
102
(1.0
cm ID)
L
B
10~ 4
-,SMOOTH
104
TUBE
1 cm I.D.
105
106
REYNOLDS NUMBER, RE
FIGURE 2-2 FLOW STRUCTURE
107
, w ili 1,dim
-
-
44
The Reynolds number is :
P
U
B
(2-10)
where
is the vapor viscosity (kg/s-m).
A typical
-
ratio
is also shown in Figur e 2-2 for
B
smooth finish 1 cm ID tube.
a
The tube is considered smooth
for all Reynolds numbers where
yL
Average drop diameters in dispersed flow may vary
over a wide range of sizes, from drops nea rly the s ize of
the tube in low quality dryout, to vanishi ngly smal 1 drops
as the flow completely vaporizes.
Tatters on et al
a relation for drop sizes in annular mist
v
-
1.6 x 10-2/
flow :
1/2
2a
Pg p g2U92
$PB
B
with the recommended
friction factor
[30] give
(2-11)
'p:
.046
(RE )0.2
(2-12)
,I
-
45
-
so that
where
a
.106
B
(RE ) 9
9g
ay
B
p
/2
(2-13)
q2
9
is the volume average diameter (m)
(the diameter of a drop such that half
the liquid in the flow is contrained in
drops with diameter smaller than
and
a
is the surface tension (kg/s
2
a )
).
This compar es reasonably well with drop sizes measured by
Cumo et al.
[8] in dry wall dispersed flow.
This func ti on
is al so plo tted in Figure 2-2 as a function of Reynold
numbe r.
s
The conclusion is that typical drop sizes are often
much larger than the sublayer thickness.
Ganic et al. performed point mass trajectory cal cul ations for small drops rotating in and traversing a laminar sublayer and evaporating unevenly due to a temperature gradient.
Some trajectories showed small drops rejected from the
boundary layer under the action of a force due to drop rotation and a force due to evaporation.
The cut-off size for
rejected drops was extermely sensitive to the assumed value
of slip ratio, and drop rejection could only: be*predidted for
drop velocities slower than the gas velocity (that is, for
upflow).
The cut-off deposition diameter was assumed to
-
be temperature dependent.
46
-
In seven of ten cases considered
no temperature dependence was observed; in the other three,
the possibilit y of temperature dependence was not investigated because the computer program could not handle some
trajectories.
The program's inability to handle some tra-
jectories was interpreted as indicative of the temperature
dependence of the trajectories; the reported temperature
dependence was this range of unresolved trajectories.
In
all cases, no drop above about 10 yim was rejected from the
boundary layer
For drop s 1arger
than the boundary layer
thickness,
trajectory cal
C ulati
Povarov et al.
[ 31] does show that aerodynamic ef fects may
ons need not be performed.
However,
be important very close to t he wall as a drop approaches
a surfac e at a high relat ive speed and shallow rel ative
angle.
Under certain con dit ions a drop may ski d off an
unheated surface without wet ti ng.
Drops in dispersed fl ow have a radial com ponent of
velocity .
Some measurem en ts [32] suggest a dependence of
radial v elocity, U
(m/s)
on frictional veloci ty
U9 (m/s)
in the range of conditions considered :
Ur
.L
U.
1
.15
(2-14)
WId
,
-
or 1
47
U1
.030
U9
(RE )0.125
9
This relation is
(2.15)
also plotted in Figure 2-2.
Due to the lack of conclusive da ta, the radial velocity
may just as easily be taken as a constant percentage
(e.g. 2% ) of the throughput gas velocity.
The details of flow struct ure allow reasonable
estimates for the drop size and velocity as well as the
vapor velocity profile.
The frictional velocity
U
is given by;
1/2
U
=
U
and the friction factor
(2'
$
is given in this case by:
0.079
RE9 0.2 5
-
48
Total Heat Transfer : A Sum of Contributions
This analysis of heat transfer from a hot tube to a
dispersed flow begins with the assumption that the total
local heat flux
Q
A (J/s-m2 )
can be constructed as a sum
o ne due to the interaction of the vapor
of two components
with the hot wall, an d the other due to impingement of
liquid drops :
+-
A wall to
flow
A wall to
vapor
A wall to
drops
(2-16)
is further assumed that the heat transfer from the tube
the vapor can be described by the same relations used
des cribe heat transfer to single phase gas flow:
Q
=
A
where
m
kg
C
RE
n
PR
Bg
all to
Ivapor
(Tw -
C
is a constant (e.g., C = .023
ka
is the thermal conductivity of the vapor
PR
is the vapor Prandtl number,
m
and
n
(2-17)
T ),
for tu rbul ent flow)
are exponents (e.g., m = 0.8
(J/s-m-C),
n = 0.4
for turbulent flow )'
and
Tw
and
T
g
w
are the temperature of the tube wall
and bulk vapor, respec tivel y
-~-~
~-
(C) .
-
The vapor Prandtl number
is defined as :
R
PR
where
49
=
,
i24-.
(2-18)
cp19 is the specific heat of the vapor at constant
pressure (J/kg-C).
Vapor properties are usually evaluated at a temperature
halfway between the wall and the bulk vapor temperatures.
Since the heat transfer to the vapor is assumed known,
the real focus of the study is the liquid contribution to
the total heat transfer.
The liquid heat transfer can be
represented as a product of a mass flux of liquid drops to
the wall and a heat transfer per unit mass :
_
wall
A
drops
where
(1 - ) Pf U
h
to
mass flux
heat transfer
per unit mass
is the vapor volume fraction,
C
(1- c)
(2-19)
S
so that
is the liquid volume fraction
*
is the component of a characteristic drop
U
velocity normal to the wall (m/s)
and
*
E:
is a characteristic fraction of the drop
which is evaporated on impact with the hot wall.
*
The qua ntity E
ness.
is a characteristic heat transfer effective-
If no heat is transferred to a drop,
E = 0 ; if
-
50
-
enough heat is transferred to the drop to completely vaporize
it,
1 .
E =
If there is li quid subc ooling prior to impact
and/or vapor superheati ng upon i mpact , it is possible to
have
E > 1
However, the heat asso ciated with typical
amounts of subcooling and su perh eati ng is generally small
compared to the latent heat, so that the heat transfer effectiveness is generall y not much more than unity.
liquid contr ibution to total
broken into a sum of heats
hea t transfer can be further
Q. ( J)
transferred to all
drops intera cting with the hot wall
all
drops
transfer
A wall to
to
a
drop,
i
i
drops
heat
-z
where
n
(Q.)
U
like i
to the tube wa
flux of drops
(2- 20)
(
(n. U i )
(2- 21)
i
is the (spatially
of drops like
and
The
i
uniform) number density
(1/im 3)
is the component of drop vel ocity of drop i
perpendicular to the tube wa 1 (m/s)
.
The drop heat transfer effectiveness
for drop i is
E.
defined as the ratio of the heat transfer red to the drop
Q.
,
to the latent heat of the drop :
Q.
Tra i3
6
Pf h fg
(2-22)
-
where
a.
51 -
is the diameter of a (spherical ) drop
such that the volume
V
V.
i (m)
of the drop is :
(2-23)
Tr a
6
The heat transfer from the wall to the drops can be rewritten in terms of the heat transfer effectiveness
and the number
ensity
size and velocity
n.
of the drops with a given
(a, U )
:
7Ta.
Q
A
wall
f h g9
to
E,
3
U
6'
n
(ag
, U
)'
E
i
drops
(2-24)
The information necessary to evaluate the heat transfer to
the drops is the density of drops of given sizes and velocities, and the heat transfer effectiveness for those drops,
given the condi
ons of impact.
Some additional relationships among the defined
variables are useful.
The liquid volume fraction can be
determined from the drop volume and drop number density
(1
-Ca)
=
ZTra.
6
3
n
(2-25)
i
This relation is used to specify the characteristic velocity
and heat transfer effectiveness :
-
52
-
3
ra. U
U
.
Z
.
n.
(a., U
.)
3
Tra
1
n
(2-26)
The breakdown of dispersed flow heat transfer into
its vapor and liquid contributions, and the further breakdown of the liquid heat transfer into contributions of individual drops,
is in keeping with the philosophy behind
past research in dispersed flow.
The result of a set of
related concurrent events is taken to be the same as the
net result of a set of similar, but independent, events.
This is appropriate in dispersed flow because the void
fraction is nearly one, so that the vapor phase may be
treated as a continuum and first order drop-to-drop interactions may be neglected.
-
53
-
Knowns and Unknowns
Details of the flow structure and assumptions about
the separabil ity of the liquid and vapor contributions to
heat transfer allow the formulation of the dispersed flow
heat transfer in terms of local conditions and one major
unknown, the drop heat transfer effectivenes
e .
The loc al conditions at dryout may be estimated for
known conditi ons of flow and heating.
The change in flow
conditions with axial position beyond dryout may be estimated on the basis of a heat transfer scheme [eg. 10, 12]
which can be adapted to include wall-to-drop heat transfer
and the assoc iated vapor generation.
Informa tion on drop heat transfer effectiveness is
neede d to com plete the analysis.
Some information is
avail able in the literature for heat transfer to impacting
drops under various conditions.
study of heat
Wachters' et al.
[33, 34]
transfer to impacting drops at high wall
super heats is the closest to dispersed flow conditions; no
data for heat transfer with wetting is available under
these conditi ons.
Pederson [35] presented both wetting and
non-wetting data for impacting
conditions.
drops in spray cooling
The drop velocity normal to the impact sur-
face in that experiment was much higher than usually found
in dispersed flow, and the drops were subcooled, as in sprays,
as opposed to saturated in dispersed flow.
Both Pederson's
-
54
-
and Wachter's data for drop heat transfer effectiveness
are shown in Figure 2-3.
The large discrepancy in data
from these two sources has been attributed to the additional
(and dominant) effect of air entrainment [21] in Pederson's
experiment.
Measurements performed in this study support
this conclusion.
The measurement of drop heat transfer effectiveness
in the wetting temperature zone, the modeling of the heat
transfer process to predict heat transfer effectiveness
for
non-wetting impacts, and
the
distinction
between the roles of drop heat transfer in spray cooling
vs. dispersed flow are presented in this study.
1,0
SPRAY COOLING
DATA (INAIR)
(SEE PEDERSON 351)
+ o A1
0,8
(INSTEAM)
(SEE WACHTERS [34])
0,6 -o
LI)
u)
u-
O.4
Cu)
0.2
+
++
+0
0
100
200
300
TARGET SUPERHEAT, Tw-Ts (C)
400
FIGURE 2-3 DROP HEAT TRANSFER EFFECTIVENESS AND TARGET SUPERHEAT
-
56
-
3 EXPERIMENTAL DESIGN: HEAT TRANSFER TO IMPACTING DROPS
Simulation of dispersed flow conditions and identification of the conditions of individual drop - surface
impacts were governing criteria for the design of the heat
transfer experiment.
The experiment focused on drop -
surface heat transfer in the wetting region, where data
are not available in the literature for dispersed flow
conditions.
Measurements were made of heat transfer rates
to sparse streams of drops impacting on a heated target
surface.
Measurements were made in a quasi-steady state,
that is, with constant target heating rates at constant
target temperatures.
The system was designed for independent
control of most parameters,
checks and calibrations.
with several
sel f-cons istency
Data processing invol ved very
few steps; sample calculations are given.
-
57
-
Dispersed Flow Conditions and System Design
The heat transfer experiment was designed to simulate
post dryout dispersed flow conditions for drops impacting
on a hot surface.
The conditions considered most important
in determining the heat transfer to impacting drops in
post dryout dispersed flow are : the wall and drop temperatures, the drop size and velocity, the angle of impact, and
the separation between the drops.
In dispersed flow, the
drops are typically at saturation temperature; drop diameters
are typically a few hundred microns (though much larger and
smaller sizes are frequently encountered); and drop velocities
in the direction perpendicular to the mean flow are a few
percent of the throughput velocity, or on the order of 1 m/s.
Dispersed flows are characterized by large vapor volume (void)
fractions, so that average drop spacing is many drop diameters
and drop - wall impacts may be considered independent.
The flow channel wall may be at any temperature above
saturation, and the angle of impact is usually shallow.
These conditions provided the design basis.
Actual dispersed flow conditions would have made
identification of a quantity of heat transfer associated
with a single drop - surface impact extremely difficult.
Therefore dispersed flow conditions were simulated.
In
order to apply information gained from measurements of heat
-
58
-
transfer to impacting drops under simulated dispersed flow
conditions to real dispersed flows, the details which characterize the impact had to be known.
A quantity of heat trans-
ferred to an impacting drop was to be associated with a drop
of given size and velocity, approaching a surface of a given
temperature through a known angle of approach.
Since the
quantity of heat transferred in a single impact is small,
however, a heat transfer measurement for multiple impacts
was performed.
The multiple impacts occurred under
identical conditions.
The experiment was designed to measure the rate of heat
transfer to a sparse stream of identical drops impacting on
a target surface.
Drop sizes, velocities, and temperatures
were consistent with dispersed flow conditions beyond the
dryout point.
Pederson's [35] experiments, designed to
measure heat transfer to impacting drops in spray cooling,
had many of the features desired for dispersed flow drop heat
transfer measurements.
Some basic elements of Pederson's
experiments were reproduced for the dispersed flow drop
heat transfer experiment.
As in Pederson's experiments, a sparse stream of drops
was generated from the vibration of a jet flowing from a thin
tube,
with selective charging and deflection of most of the
drops to render the stream sparse.
This stream of drops
impacted on a hot surface, which was independently heated and
-
59
-
instrumented with a thermocouple for temperature sensing.
The heat transfer measurements were made in a quasi-steady
state.
A constant target heating rate was set and measured
at a constant target temperature (unlike Pederson's quench
experiments).
An overall schematic of the apparatus as
built and operated is given in Figure 3-1.
The experimental system was divided into subsystems
which performed specific functions.
subsystems
There were four major
the liquid supply system, the drop generation and
charging system, the heat transfer target system, and the
temperature and heat transfer interpretation system.
Their functions are described briefly in the following
sections.
-
1,,___
4RI4
1
t- -
FIGURE 3-1 DROP HEAT TRANSFER EXPERIMENT SCHEMATIC
-
61
-
Liquid Supply System
The liquid sypply system supplied distilled water
und-er pressure (typically 25 psig) to a stainless steel,
30 gage hypodermic needle.
Steady liqui d flow was achieved
through system pressurization.
Pressure was supplied from
a high pressure nitrogen source through a pressure regulator
to a liquid supply tank.
When the liqui d supply valve was
opened, liquid was forced out of the tan k and through a
flow meter, through a heated section, through a filter holder,
and finally through the hypodermic needl e.
Figure 3-2 is
a schematic diagram of the liquid supply system.
In the heated section, the liquid temperature was
raised almost to saturation temperature.
The liquid
temperature was monitored with a thermocouple at the
entrance to the filter holder.
The filter holder contained
a 5 micron teflon filter to prevent small particles in the
flow from entering and clogging the needle.
The needle
itself was specially made with the tip cut square (rather
than at a sharp angle as with most hypodermics), and then
chemically etched so that the tube exit would be as smooth
as possible.
The needle inside diameter was checked by
viewing through a microscope;
the manufacturer specified
diameter of 0.004 in was verified.
The needle was soldered
to the exit of the filter holder to prevent leakage.
HEATING
TAPE
FLOW
METER
N2
30 GAGE
STAINLESS
STEEL
NEEDLE
VARIAC, 0 - 110 (V)
FIGURE 3-2
LIQUID SUPPLY SYSTEM
U1111110111IM1111101
-
63
.11,
-
Drop Generation and Charging System
The sybsys tem which gene rated a sparse stream of drops
of uniform size and veloc ity used the same technique as
that used by Ped erson and deve loped by Schneider et al.
(see also [37]; [38]).
[36]
L iquid was forced through a small
tube and exited in a lami nar j et.
The tube was vibrated with
a piezoelectric bimorph t ransd ucer at a characteristic
frequency which caused the jet
to break up into uniform drops.
One drop is prod uced per vibration period
T
= 1/f, and
f
T
(s),
where
is the v ibrat ion frequency (1/s).
Axial
vibration of the tube is recommended; however, for these
a transverse vibra tion was sufficient.
condition s,
were then
s
electively charged : 1 out of every
was left uncharged, where
m
m
The drops
drops
was any integer between 1 and 99
The drops were charged by pla cing a ring around the jet at
the point
0
f break-up and app 1ying a voltage to the ring,
while the 1iquid stream itsel f was grounded (by grounding
the metal tube through which it passed).
m
One out of every
drops was left uncharged by pulsing the charging ring
voltage t o zero once in every m cycles for the duration of
one cycle
The electronic ci r cuits which performed these
functions are shown schematic a lly in Appendix A3, together
with samp le signal diagrams.
The charged drops were then
deflected by a potential fiel d between a pair of deflection
plates.
The uncharged drops did not deflect, a nd instead
.
-
formed a sparse stream.
64
-
Drop charging voltage was about 300 V;
drop deflection plate voltage was about 3,000 V.
supplies provided these voltages.
Two power
A signal generator, with
a signal of no more than a few volts, provided the signal
for both transducer vibration and for the drop charging
sel ecti on
It
circuit.
was found that the jet would break up into uniform
drops at several different frequencies below the characteristic frequency recommended by Schneider and associates.
These frequencies were distributed in a range up to a
factor of nearly 10 below the suggested vibration frequency.
It was easy to see when drops (on the average of 250 ym
in diameter) were formed by illuminating the stream with a
strobe set at the vibration frequency (or some integer
division of it).
Selective drop charging simplified this
visualization by dividing the drop stream into a major
and a sparse stream.
This process is illustrated in the overall schematic
of the experiment,
Figure 3-1.
mm Iin~,
-
65
-
Heat Transfer Target System
Heat transfer measurements were made in a quasi-steady
state, that is, at constant target tempe rature.
This eli-
minated several problems associated with interpre tation of
transients and comparisons of transients observed under
different conditions.
The heat transfer target was a sma 11 metal (steel or
copper) cylinder, 6.4 mm in diameter and 3.2 mm in length.
The flat side on which drops impacted wa s finished smooth.
A small ther moco uple hole was drilled from the cen ter of
the opposite sid e through almost the entire length
placing
The cyl inder
the thermoco upl e close to the impact surface.
was wrapped with a short (10 cm) length of 30 gage fiberglass insula ted nickel-chromium thermocouple wire which
served at a res istance heater.
Voltage was suppli ed to the
heater termi nal s at a constant level from a
supply.
0 to 9 V power
The hea ter resistance was about 2 Q.
The target -
heater - the rmoc ouple assembly was cemented into a cyl indri cal
ceramic bead wit h the target impa'ct surface facing out
and flush wi th t he bead.
in Figure 3-3.
This assembly is shown schematica 1ly
The ceramic bead fit into a Lexan hol der
which was set into the test section at various angles with
respect to the drop stream.
-
66--
CERAMIC
BEAD
SHRINK FIT TUBING
TARGET
HEATER
FIBERGLASS INSULATION
MOCOUPLE
TARGET
FIGURE 3-3 TARGET ASSEMBLY
IW'
-
67
-
Temperature and Heat Transfer Interpretation System
The liquid temperature and target surface temperature
were monitored via nickel-chromium
-
nickel-alumel thermo-
couples (30 gage fiberglass insulated).
Thermocouple wires
were extended from the test section to a thermocouple jack
panel (< .5 m distance).
The jack panel was wired with a
heavier gage thermocouple wire to a thermocouple switch;
only one input to the switch could be monitored at one time.
The switch
(0 - 26 mV
Liquid
output was connected to a chart recorder
in five overlapping 6 mV ranges).
and
target
temperatures were maintained con-
stant by adjusting heat supplied until a steady chart reTemperatureswere interpreted
corder reading was observed.
from chart recorder readings from published tables of therm 0couple votages vs temperature.
Power was supplied to the target heater (- 22) from
a 0 - 9 V variable power supply.
The voltage supplied to
the heater was monitored with a digital multimeter.
A
switch disconnected the voltage supply so the heater resistance at elevated temperatures could be measured by the
multimeter.
$
at voltage
The power supplied to the heater of resistance
E
is
simply , Q (J/s):
.E2
Q
.10".14.100,
N
I M RW
(3-1
)
-
-
68
Independently Selected Parameters and System Checks
The experiment was designed to allow independent control
of several parameters
the liquid flow rate Wf(kg/s), the
liquid temperature Tf(C), the jet vibration frequency
f(1/s), the drop charging selection m
ture Tw (C),
and the impact angle
$ .
,
the target tempera-
For a given needle
size, certain discrete frequencies f broke up a jet of flow
rate Wfinto drops of uniform size.
The drop separation D
(m) in the sparse stream depended on the flow rate
Wf
,
the
vibration frequency f , and the drop charging selection m.
The drop spacing was used to calculate the drop velocity
in the sparse stream.
If fewer drops were left in the sparse
stream, they tended to slow down more (due to air drag).
Various targets and heaters were used,
so that for identical
impact conditions (drop size, velocity, temperature, and
angle
of approach, and target temperature) the heater
voltage E(V) and resistance
Independent checks
meters.
$ (Q) were different.
were made on most system para-
The manufacturer's flow meter calibration was
checked by measuring the actual flow rate (i.e. by catching
the flow in a graduated cylinder for a fixed period of time).
The frequency f of the signal generatorwas verified by
displaying the signal on an oscilloscope.
The drop charging
selection was, evident from the strobe image of the streams,
-
69
-
with 1 out of every m drops in the spar se stream.
This
also veri fi ed that one drop wa-s produced per oscillation.
The two thermo couples (detecting liquid and target temperatures) werechecked for prope r output at 100
C.
The
energy input to the target was determine d by measurements
of elect ric potential and resi stance.
However, when com-
plete evaporation of the drops took pla ce, an effectiveness
of 1 sho uld be calculated from the heat input to the target.
The data points were checked by rerunnin g the same conditions
with dif ferent heaters,
since the drop heat transfer effec-
tiveness should not depend on the targe t heater.
Variations
of the number of drops impacti ng on the target per unit
time (by varying m) also provi ded a means of checking the
data since the heat transfer to a single drop should not
depend on the number of drops striking the surface,
impacts were independent.
if the
-
70
-
Measurement Technique
The decision to make steady state measurements simplified not only the interpretation of data, but also the
measurement procedure.
Steady conditions were established
in the various subsystems in about the same sequence as
they have been described.
The liquid supply system was first activated to provide
a steady flow.
The pressure drop through the filter and
needle depended on the water temperature, so the water was
first heated (in a large heated section, 'u.5 m long,
, 1 cm internal diameter) and then allowed to flow under
constant pressure.
The desired flow ratewas obtained by
adjusting the back pressure on the liquid storage tank.
The liquid flow rate W
and temperature Tf (thermocouple
output), were recorded.
Next, the jetwas vibrated by the piezoelectric bimorph
transducer .
A frequencywas selected to produce drops of
a given size; this frequencywas recorded.
the frequency was not entirely abitrary,
range of possible frequencies.
drops was established,
The choice of
but there was a
When a steady stream of
the charging and deflecting electron-
ics were activated from the warm-up state.
The charging
ring and deflection plates (held in a Lexan frame)
were
positioned so that the ring surrounded the jet break-up
I
-
71
-
It was easy to see when the ring was properly posi-
point.
tioned because the uncharged drops
de fi ne d
a very clean
path which was the same as the jet path pri or to charging.
The charging pulse.width
was
adjust ed t o exactly one
cycle width by (simultaneously) displa yi ng the signal on
Another method was to obs erve the sparse
an oscilloscope.
stream and adjust the pulse width so that
a time was uncharged,
uncharged jet.
If
only one drop at
and following the pat h of the original
the pulse width was too long, more than
one drop out of every m would be
in the sparse stream.
If the pulse width was too narrow,
the spar se stream would
be slightly charged,
and slightly deflected.
were used and found satisfactory.
Both methods
The drop spacing D was
measured (with a transparent ruler) for the drop charging
selection m, and both D and m were
then recorded.
The target was introduced into the test section at an
angle
6
to the steady sparse stream of drops.
The voltage
to the target heater was adjusted until the desired temperature was maintained steadily with drops impacting on the
front surface.
The angle
heater resistance
8 , the heater voltage E , the
$ , and the target temperature (thermo-
couple output giving target temperature Tw) were recorded.
Next,
the entire stream was charged so that all drops
deflected away from the target,
were
and the heater voltage Eo ,
-
72
-
required to maintain the target at the same target temperature T
, wa-s recorded.
The heat transfer to the sparse
stream was taken as the difference between the heat supplied
at E and Eo .
With a steady drop stream established, additional measurements were easily taken by varying the number of drops
in the sparse stream (1/m) and recoding new values of heater
voltage E
,
(E0
heater voltage with no drops on the target,
,
is the same) and drop spacing:
maintained the same.
0
,
with all other conditions
Similarly, additional measurements
were quickly made at different temperatures by adjusting the
heater voltage so that the desired temperature was steadily
held.
Or the impact angle
was
changed by rotating the
target assembly holder, and new values of heater voltage E
and Eo_
(with and without drops) and heater resistance
$
(which-varies with temperature)were recorded at each target
temperature.
Some time and care weretaken in estab-
lishing a steady flow of drops, with the proper selective
charging pulse width.
a temperature Tf
pulse width
T =
Once the liquid flow rate Wf
at
the vibration frequency f , and the
,
/f
,
were properly established,
the other
parameters, (drop charging selection m , target temperature
Tw , and impact angle
e) were easily and quickly varied.
In addition, target-heater assemblies could be changed in a
few minutes.
-
73
-
Data Processing
The heat transfer experiment was designed to require
relatively few steps between actual measurement and interpreted data.
listed i n Tabl e 3-1
Measured quantities a
together with sample values.
Three
ties (evaluate d at saturation condi
nown flui d prop erons) were needed to
interpret the data; they are listed in Table 3-1 as
Known Quantiti es.
For each measure ment , four quantities
were calculated : drop diameter a (m) ; drop impact velocity
(normal to the target) U (m/s) ; impact Weber number WE
and drop heate r transfer effectiven es
tions were used to compute each one.
6
.
Simple equa-
Th e calculated para-
meters, the equations used for comp utat ion, and sample
values are listed in Table 3-1 unde r Calculation.
'A drop
heat transfer effectiveness of 1 at a l ow wall superheat
provided an added check on the sys tem : it was expected
that complete vaporization of the drops would occur under
these conditions.
-
TABLE
3-1
74
-
Data Interpretation : Sample Calculation
Measurement
units)
Flow Meter (Mass Flow Rate)
Wf
kg/s)
4.0 x 10-5
Frequency
f
1/s)
4600
Drop Selection
m
Target Thermocouple (Temperature)
Tw
(C)
147
Heater Vol tage (wi th drops)
E
(V)
2.89
Heater Vol tage (no drops)
E
(V)
1.92
40
Heater Resistance
1 .-93
Liquid Thermocouple (Temperature)
Tf
(C)
Drop Separation
D
(m)m
Liquid Density
Pf
(kg/m
Latent Heat of Vaporization
hfg
(/kg)
86
2.6 x 10-2
Impact Angle
Known Quantities
Surface Tension
3)
958
2 26 x 10 6
(kg/in2- s)
0584
Calculation
6 W
Drop Diameter
Drop Impact Velocity
, 1/3
-a
D f sin ($)
a/i
WE
Pf U,
Weber Number
2.6 x 1
(m)
=
U
(m/s) 2.11
-
20
Heat Transfer Effectiveness
E2
-
E02
=
Wfhfg
t (T , Tf, a, U.)
1.02
-
75
-
The data reducing equations are easily explained.
First the drop diameter is calculated.
each vibration produces one drop.
It is known that
The
mass
of the drop
times the production frequency f must equal the mass
flow rate Wf, or :
Tf a
3
f
=
6
(3-2)
W
1/3
a
=
6Wf
Next the drop volo city is calculated.
(3-3)
Suppose a stream of
drops with spacing D is traveling at a velocity U .
An ob-
server at a fixed location would co unt a rate of U/D drops
In the s parse stream, the number
passing by per uni t time.
of drops generated per unit time is fixed and equal to f/m
so that
U
(3-4)
D
or
U
=
f/m
(3-5)
The component of this vel ocity normal to the impact target
is
MM".
P.Mro
-
-
76
-
Df
UL
=
U sin $
=
(3-6)
sin $
-
m
The Weber number, based on the normal component of impact
velocity, is:
2
(3-7)
a
Pf
WE
The heat removed by the sparse stream of drops is the difference between the target heats required to maintain
constant target temperature with and without impacting drops:
E2 -E 02
.
Qdrops
-E(3-8)
The latent heat of the sparse stream is the product of the
Im Wf
liquid mass flow rate,
of vaporization,
(kg/s)
and the latent heat
,
hfg
Qlatent
-
m
.
f1h
(3-9)
heat
The drop heat transfer effectiveness
e
is the ratio of
the drop stream heat transfer to the drop stream latent
heat:
77
-
-
latent heat
drops
E2
(3-10)
E0 2\
(3-11)
W hfg
-
4
78
-
HEAT TRANSFER DATA AND INTERPRETATION
The drop heat transfer data clearly show the
distinction between wetting and non-wetting temperature
zones.
Complete evaporation of drops was observed in the
low superheat region, while very little heat transfer took
place in the high superheat region.
Calculations of
heat transfer to air entrained by the drop stream show
that this effect can easily account for the entire heat
transfer rate measured at high superheat.
prevents
While this
the determination of drop heat transfer from
measurements in the non-wetting region, it offers an
explanation for the large discrepancy (factors of 10 and
more) in the data reported in the literature.
-
79
-
Drop Heat Transfer Measurements : Some Observations
A summary of drop heat transfer data for all conditions is given in Figure 4-1.
The major factor influencing
drop heat transfer effectiveness is the wall superheat.
At low superheats, the heat transfer effectiveness is about
1
,
indicating total evaporation of the drops.
At high
superheats the effectiveness is very low, indicating very
little evaporation.
This gentral observation is consistent with what is
known about boiling heat transfer, and with what was observed in the process of making these measurements.
In the
1ow superheat region, the drops seemed almost to disappear
into the targe t.
In the high superheat region,
rebo unded very regularly off the target.
the drops
Some additional
ob servations are useful in interpreting finer details.
At low superheats and high impact rates (achieved with
by i ncreasing the number of drops in the sparse stream),
stea mwas obser ved from the target (visib le steam means wet
stea m due eith er to incomplete evaporati on or condensation
in t he cooler air) and sometimes liquid build-up on the
surf ace (obvio us evidence of incomplete evaporation).
Hence
the tendency of the drop heat transfer effectiveness to
drop off at very low
superheats was expected.
The temperature region between high and low effective-
1,4
0
*
S
0
0.
*
0
1.2
S
S
S
1.0
*
0
*
*
1*
30 0
S
I
*
0e
5
S
S
S
0.8
LU
Lu
0.6
WElTING REGION
NON-ETTING REGION
0.4
0.2
.
.
0
0
00
50
200
100
150
TARGET SUPERHEAT, Tw-Ts (C)
250
FIGURE 4-1 DROP HEAT TRANSFER EFFECTIVENESS DATA SUMMARY
0
300
-
81
-
ness also manifest.ed itself in three ways.
Fir st, it was not
possible to take steady heat transfer data in this region,
because slight perturbations resulted in quick t emperature
1 second response time) in either direction
excursions (,,,
(towards quench or high superheat).
This excur si on in
either direction indicated a steady heating rat e som ewhat
below the total evaporation rate (hence the ten dency to
quench when perturbed), but above the low effec ti ven ess
rebounding drop rate (hence the tendency to qui ckly superheat when perturbed).
Second, the visual obser vati o n re-
vealed a strong image of the impacting stream,
but a faint,
slightly irregular image of a rebounding stream (unl ike
image of the regul ar reboundi ng stream at high
the stron
superheat
).
Third,
a definite hum was heard
from the target
impact ar a; the pitch of the hum increased when the number
of drops
n the sparse streams was increased.
The three
phenomena suggest that what was observed as a quasi-steady
response
t an average target surface temperature w.as really
a highly
insteady respo nse as far as each drop was concerned.
Some drop
might have completely evaporated,
might ha
rebounded with very little
while others
evaporation.
One f nal visual ob servation was useful not only in
interpret ng data from this experiment,
some light in the
but also in casting
discrepancy between Pederson's [35] (high
-
82
-
ness) and Wachters' [33,34] (low effectiveness) data at
high target superheat.
established
With a steady sparse stream of drops
a small smo king torch (cotton swab with a drop
of titanium tetrachl orid e) was
placed in the test section.
The observe d pattern of smoke motion revealed a large jet
(many drop diameters) of entrained air around both the
sparse and main streams.
It will be shown that this air
entrainment is sufficien t to account for the entire heat
transfer rate measured at high target superheat.
While the
exact condi tions of Pede rson's experiments are not known
(drop spaci ng, drop trav el length, and drop momentum loss),
it
is likel y from his ra nge of conditions that significant
air entrain ment occured, and that his measurements also
included signif icant hea t transfer to entrained air.
Hall [32] came to the same conclusion in his experimenral
work, and based his anal ysis of water spray cooling on air
entrainment, negl ecti ng direct drop - surface heat transfer
as a secondary effect.
Wachters' two experiments were both
different from the techn ique used in this and Pederson's
experiments,
two ways.
ge tting aro und the air entrainment problem in
In the first
[33] a "large" drop (2.3mm) at low
impact velocity was cons idered, so the air entrained by the
single large drop was le ss, and the latent heat of the drop
(which scales the heat transfer) was greater.
In the second
[34] th e drops (60 im) were actually carried by dry steam,
MMINW
-
83
IwilwfiM
ulh
-
and measurements with and without drops were all performed
in the presence of flowing steam.
dispersed flow conditions.)
(This is very close to
Both of Wachters' measurements
showed drop heat transfer effectiveness at high target superheats much less that that
experiment.
measured by Pederson or in this
For these reasons it is concluded that the
cooling of the target due to the observed air entrainment
prevents a realistic interpretation for heat transfer to
impacting drops at higher superheat
in this experiment.
from the measurements
-
84
-
Drop Heat Transfer Effectiveness Data
The heat transfer data
were
shown to be repro-
ducible by repeated steady measurements under identical conditions.
Several interesting aspects of the heat transfer
measurements are illustrated in Figures 4-2 through 4-5.
In Figure 4-2, drop heat transfer effectiveness data
for two targets are shown for nearly identical conditions.
The data match quite well in the high effectiveness and low
effectiveness regions.
However, the transition temperature
region is lower for the clean copper surface than for the
oxidized steel surface.
Moreaux et al.
[39] also observed
an early transition to rewet in the quench of a metal sample
w.hen an oxide layer separated the metal surface from the
liquid; that is, they observed transition to a higher heat
transfer mode at a higher metal temperature with the oxide
on the metal.
The effect of liquid subcooling is shown in Figure 4-3.
There is some scatter in the data (probably due to error in
determining the liquid flow rate from the flow meter reading)
but it does not seem directly associated with the subcooling.
An estimate of the scatter in the data may be obtained
directly from the subcooling group
... APOW"
CS :
M
I
y Ingligiiii,I1"I
1.4
'.o0x
COPPER TARGET
o STEEL TARGET
1.2 ~
x/X
w 1.0 -x
(OXIDIZED)
a =250 pm
WE= 14
0.8
= 86 C
~.T
LuJ
H
uc
0.6
C-)
c
Lu
x
0.2
x
0
0
50
100
150
200
250
TARGET SUPERHEAT Tw-Ts (C)
FIGURE 4-2 DROP HEAT TRANSFER EFFECTIVENESS FOR TWO TARGETS
300
1,4
1.2
w
c/)
LUj
0
0
0
Tf = 86 C
o NO STEAM
A SOME STEAM
IN STEAM
* Tf = 23 C
A
110
a = 260 pm
WE = 13
STEEL TARGET
0.8
1-
0.6
LLi
UlULLUJ
0.4
0.2
0.
.50
100
150
200
TARGET SUPERHEAT, Tw-Ts (C)
250
FIGURE 4-3 DROP HEAT TRANSFER EFFECTIVENESS WITH LIQUID SUBCOOLING
300
Mwill.
IW1111WISM
-
87
Ccpsf(Ts
hfg
-
- Tf)
The maximum value of the subcooling rates is CS = 0.14
at
Tf = 23 C; at
Tf = 86 C,
CS = .03 .
The amount of
heat assiciated with the subcooling under normal experimen(Tf = 86 C)
tal conditions
latent heat.
is small with respect to the
Therefore subcooling
significant parameter.
is not considered a
No noticeable difference in transi-
tion temperature was observed with the increased subcooling.
There is no
systematic change in drop heat transfer
effectiveness with Weber number in the low superheat region.
The data show an effectiveness of about 1 for the range of
Weber numbers considered
:
3 < WE < 40
.
(The most signi-
ficant change in Weber numbers was achieved by rotating
the target, thus varying the impact angle
also reported an effectiveness of
of
480
.
e.) Pederson
.9 for a Weber number
This is an important conclusion of these experi-
ments.
The data in Figures 4-4 and 4-5 are for the dry impact
region.
In Figure 4-4, the difference in transition to the
low effectiveness region for copper and oxidized steel is
still evident.
On the whole higher heat transfer is also
associated with a higher drop impact Weber number, as is
0,2
COPPER:
x
WE
=
13
STEEL
(OXIDIZED):
w
C/)
C/)
* WE
=
13
o WE
=
3
LLu
0.1
LJ
a
= 250 pm
Tf
=
86 C
e
I
I
100
200
TARGET SUPERHEAT, Tw-Ts (C)
FIGURE 4-4
DROP HEAT TRANSFER EFFECTIVENESS: TRANSITION
300
,12
.10
c./)
C.)
LUJ
LUJ
A a = 240 pm
A
.08
v a = 260 pm
)( a =
290
+ a
350 pm
=
.06
pm
+
L)J
Tf
=
Tw-Ts
.02
86 C
=
195 C
COPPER TASGET
0
30
20
WEBER NUMBER, WE
40
FIGURE 4-5 TARGET HEAT TRANSFER AMD WEBER NUMBER
90
evident in both Figure 4-4 and Figure 4-5 (except for one
a = 290 pim).
contradiction for
Also larger heat transfer
seems to be associated with smaller drops (again except for
the contradiction in Figure 4-5 at
WE = 10
for
a = 290 ypm
Inaccuracies are expected in the calculation of heat transfer effectiveness in this region because the volt ages required to maintain steady temperatures with and without impacting drops werevery close in value, and the ca1cul ation
procedure involves taking the difference in the squares of
these voltages.
The average effectiveness value seems to
be between
and
values of
.02
.04
numbers (20 to
to
.1 which is consistant wit h Perdeson's
.25
700).
for a much higher range of Weber
-
91
-
Superheat
Wall
The Effect of Entrained Air at Hih
The entrai nment of air by the drop stream was clearly
shown
test section.
by a visual demonst rati on wi th smoke in the
The effect of air entrainment on target heat
transfer is of interest.
A sim p1e observati on shows that
cooling by air jet can easily account for the entire increase
in heat transfer from the targe t when the sparse stre am is
directed at the target at high superheats.
Let Q9
9
the heat required to maintain the target- temperature
a static environment; let Q9
be
in
Tw
be the heat required to mai ntai n
this temperature when a jet is in the test section but all
drops are deflected below the target; let
Q be the heat
required to maintain this tempe rature when a sparse stream of
drops is allowed to impinge on the target.
T
measurements show, for a target at
Q9 - Q 0
=
A typical
set of
= 367 C,
.52 (J/s)
(4-2)
and for 1 out of 10 drops in the sparse stream,
Q -
=
-
(J/s)
(4-3)
the sparse stream,
or for I out of 5 drops
Q
.36
Q9o
=
.58
(J/s)
(4-4)
-
92
-
The conclusion of this example is that the heat removal
due to the sparse stream of drops (.36 to 58 J/s) is of the
same order of magnitude as the heat removal due to an air
jet induced by the main stream which passes near the
target (.52 J/s).
The entrainment of air by the sparse
stream of drops is fully expected because, as the drops
slow down due to air drag, momentum is transfered to the
air.
The rate of momentum loss of the stream can be calcu-
lated because both the drop exit velocity from the needle
and the'drop approach velocity at the target surface are
known.
The exit velocity is just the liquid volumetric
Wf
flow rate -T divided by the needle cross-sectional
pf
area
A0
U0
=
(4-5)
p A
The needle internal diameter is
100 pm
manufacturer and checked in a microscope ).
velocity
tum flow
U
Z
(specified by the
The approach
is determined by equation (3- 5 ).
The momen-
at the needle exit (in the sparse stream) is:
z0 The momemtum flow
U
Z
(4-6)
of the sparse stream at the target
16
-
93
-
approach
(
Wf
m
-
(4-7)
The momentum lost by the drop stream is gained by the air.
Consider a simple model of an air jet with average velocity
U
= Cl
U
(where
C1 < 1)
and
average area
A9
The momentum flow of this jet
(4-8)
(A9 U9 )
P9
and is equal to the momentum flow loss of the drop stream.
(with
Z. - Z
=
Wf (U
0
U)
-
Z
=
The mass flow of air
(Uo0
pg C1
2 A U2
U0)
Wf = PfA
pfm A0o0 U
(4-9)
-
U)
W,
(4-10)
(4-11)
=
p
2
C2 A U
9g1
9
for the simply modeled
(4-12)
-
air jet is
94
-
:
W
=
p
=
pf
U
A
1
or,
heat
T
=
Ag C 1U
(4-13)
A U
(4-14)
U - U
0
mnC
The
p
=
0
U
capacity
Q
0
of the induced air stream at
25 C , wi th respect to the target temperature
T
= 367 C
is
W
c
1
(Tw
-
T 0)
4-15)
U - U
A0 U0 cp)g (T
fmC1
U
T )
(4-16)
For the same conditions discussed above, and for a sparse
stream of
U0
of
1
out of every
5.3 m/s
drops with an exit velocity
10
, and an approach velocity
and with an assumed value of
jet mass flow is :
=
and the heat capacity
is
C1
U
3.7 m/s
1 , the estimated air
1.78 x 10-6 (kg/s)
(c
of
= 1000 J/kg- C)
10g
(4-17)
I
-
95
.61
Actually
Cl
is less than
-
(4-18)
J/s
1 , so the calculated heat
capacity of the air jet would be greater
than
.61
J/s .
The important point i s that
heat
capacity
the jet
with respect to the target
rger
than the
umed heat
removal rate due to the jet
A more detailed analy s is of heat tran sfer
to an obstruction is not pe rfo rmed because vi su
om a jet
observa-
tions with smoke show that the natural convection pl ume
around the target ass embl
with the air jet, mak ing
provides considerable interferance
low analysis quite difficult.
How-
ever, the ove rall calculati ons, all based on actual measurements of heat and momentum exchange, show that sufficient
momentum is transferred to the air by the drops to induce
a flow which could account for the observed heat removal.
Measurements of additional heat removal when the target is
placed near a similar air jet support this conclusion.
These argumen ts, supportet by the visual observation of
the entrained air jet, sug gest that the heat removal due
to entrained air prevents further interpretation of the
heat transfer measurements of high superheat with respect
to drop heat transfer alon e. At low superheat the amount
of heat due to air jet cooling (measured at high superheats)
- -
-
96
-
amounts to only a few percent of the heat removal due to
complete vaporization of the drops.
This effect should be
proportional to the temperature difference between the
wall and the jet, and therefore the heat transfer to the
jet of entrained air is reduced at low superheats.
-
97
-
5 ANALYSIS OF DYNAMICS AND
HEAT TRANSFER TO IMPACTING DROPS
An analysis of drops impacting on a hot surface is
presented for the non-wetting region.
Simple modeling of
the drop shape during impact leads to the derivation of
equations of drop motion and drop deformation, using
Lagrangian methods.
The predictions of drop impact
dynamics and heat transfer compare favorably with available
information on this process.
The results are relatively
insensitive to the assumed shapes for drop deformation.
The analysis lends itself to application in more complex
systems.
A few brief claculations of surface - liquid heat
transfer in the wetting region suggest that a combination
of conduction and nucleation may be the mechanism responsible
for the total evaporation of drops.
Some comments are
addressed to the topic of the wetting - non-wetting
transition temperature.
-
98
-
Background and Previous Efforts
Numerous research efforts have focused on the
evaporation of small drops suspended by vapor over hot surfaces, a pheno menon associated with the observations of
Both Wachters et al. [40] and Gottfried et al.
Leidenfrost.
[41,
42] model ed the vapor cushion between the drop and
the surface to estimate evaporation times for drops set on
hot surfaces.
Baumeister et al. [43]
larger, deformable drops,
did similar work for
as did Sho essow et al. [44] for
drops on rotating plates.
Heat transfer to non-wetting impact ing dr ops was
measured and analyzed by Wachters et al.
[33,
Reasonably successful pre dictions of heat
34].
trans fer during
impacts were obtained usi ng the same vapo r cush ion model as
for the stationary drop,
and supplying an accel eration
force (instead of gravita tional force for the s tationary
drop) based on high speed photos of the impacti ng drop.
The radius of the drop as a function of time,
the photos,
t aken from
was also requ ired for the ana lysis.
Since this
study, several other heat transfer models
have been
presented by Cumo et al. [ 45], McGinnis et
al
et al, [47],
Holman et al.[48], and Hall
.[4
[21].
6],
Sarma
Cumo, in
particular, observed an impact time that was constant for a
MAIININh
-
99
-
range of temperatures above the transition temperature,
which increased tremendously in the wetting zone.
but
McGinnis
and later Holman presented a correlation for total heat
transfer on impact.
Sarma did an overall heat transfer
calculation based on the max imum drop defor mation, a dropwall separation given by the force on the drop,
and a
constant impact period.Inste ad of the force necessary to
rebound the drop during the impact period, the liquid stagnation pressure force was used, resulting in significantly
higher heat transfer rates.
rson' s [35] spra
due to effects
The results compared well with
cool ing data, which are thought to be
f entr ained air in the experiment.
's model allowed for no deformation of drops.
A
straight momentum cal cul atio n was performed based on an
external force due to a vapor cushion under the rigid drop.
Of the heat transfer models, that presented by Wachters is
the most appealing, since it accounts for
the signifi-
cant physical mechanisms, it is not restricted to any data
base (though it was derived for a certain range of dynamic
impacts and is not valid, for example, for drops which
shatter on impact),
and is reasonably justified by two
independent groups of measurements.
The disadvantage
of
Wachters' technique is the need for information on drop
dynamics which must be supplied from photographs.
Relatively little work has been done on heat transfer
-
100
to drops which impact and we t.
-
A heat transfer model for
wetting-impacting drops was developed by Illoeje [6] and
has been extended by Chen et al. [20].
The model assumes that
a fraction of the drop is rejected from the wall after a
brief nucleation period; thi s is inconsistent with measurements of this study showing complete vaporization and
prono unced nucleation o f imp acting drops which wet the surface.
Illoeje's model
al so does not distinguish between
wetti ng and non-wetting surf ace temperatures,
it
and in fact
is most often used in the non-wetting region.
Virtually all of the experimental studies with
impac ting or stationary drop s identify the transition
tempe rature between wet ting and non-wetting.
Some investi-
gatio ns report surface prope rty and surface finish effects
on tr ansition temperatu re.
Wachters' study suggests that
the non-wetting regime is no t fully developed for a significant temperature range above the initial transit ion
temperature.
This analysis of heat transfer to impacting drops is
in two parts; the non-wetting and wetting impacts are
considered separately.
For non-wetting impacts, the
approach of Wachters is combined with a dynamic model of a
deforming drop,
thus eliminating the need for deta ils taken
from photographs.
In the wetting region, calculat ions for
conduction, nucleation, and bubble growth are cons istent
-
101
-
with the observed complete evaporation of the drop.
Some comments about the basic approach to the heat
transfer analysis are appropriate.
The analysis can be
described as a coupling of quasi-steady heat transfer and
dynamics.
The total heat transfer to a dynamic system over
a time period T(s) is the time integral of the product of
2
the instantaneous heat flux q (J/s-m2) and the instantaneous heat transfer area A(m ).
Q
q A dt(5-1)
0
The instantaneous heat flux is assumed for a quasi-steady
geometry because the thermal response is much quicker than
the dynamic response.
For the dry impact, the heat is
transferred through a vapor cushion of thickness y(m) so
that the instantaneous heat flux is approximately:
k (_T
q
g
T )
(5-2
wy
where k9 is the vapor thermal conductivity (J/s-m C)
and
Tw and Ts are the surface and saturation temperatures
(C), respectively
For a drop wetting the surface, the average heat flux by
conduction in a time t (s) is approximately:
q
(k fPf c
)12 (Tw-Ts)
(t )1/2
(5-3)
-
where k
P
and
c
102
-
is the liquid thermal conductivity (J/s-m2-C)
is the liquid density (kg/m3 )
is the liquid specific heat at constant pressure
(J/kg-C).
The impact dynamics (and/or bubble growth dynamics) must
supply the time period T (or t ), and both the heat
transfer area A and the drop-wall separation y as functions
of time during the impact.
Thus the combination of
dynamics with quasi-steady heat transfer analysis allows
the computation of the total heat transfer.
Mi
-
103
-
Drop Dynamics
Two important types of energy storage for a liquid
drop are kinetic energy (due
to either center of mass or
internal motion) and surface energy (due to surface
Certain types of drop-surface impacts are
tension).
governed by a transfer of energy between these energy
storage modes.
The kinetic energy of the drop (due to the
center of mass motion toward the surface) prior to impact
can be stored as kinetic energy of internal motion and
increased surface energy as the drop deforms against the
surface during impact.
This type of impact can occur when
the initial kinetic and surface energies of the drop are
The kinetic energy KE (J) of a spherical
comparable.
drop moving with uniform velocity is equal to the product
of its mass and velocity squared:
1 ra 3
KE
pf
-
2
U ;
(5-4)
and the surface energy PE (J) is equal to the product of
the surface tension and the surface area:
PE
where a is
=
a r a
,
the drop diameter (m),
Pf is the liquid density' (kg/m3
U is the drop velocity (m/sec)
and
a is the surface tension (kg/sec 2
(5-5)
-
A Weber numberS
104
-
which is proportional to the ratio of the
initial kinetic and surface energies in the undeformed drop,
is useful in characterizing the nature of the impact:
WE
pf U2 a
a
=
(5-6)
For low Weber numbers, the kinetic energy is small compared
to the surface energy, and a small deformation will accomodate the energy storage mode transfer during impacts.
For
moderate Weber numbers, a significant deformation* is
required.
occur.
For large Weber numbers, drop break-up will
Pederson [35] observed drop break-up on impact for
Weber numbers over about 75, in agreement with Wachters et al.
[33].
The energy conservation principle prescribes the
exchange of energy in the storage modes and the work done
by the system against an external force F (kg-m/s2)
through a displacement y (see
e.g.
[49]):
t2
[6(KE-PE)
+ F6y] dt
=
0
(5-7)
tI
This Weber number is different from another Weber number
WE'
p
(Uf
-
U )
a
commonly used to estimate drop break-up (at WE' ~ 7) due to
drag forces in gas-liquid dispersions in which the two
phases travel at different velocities. Notice the use of
the gas density rather than the liquid density.
-
105
-
The interchange of mean motion kinetic energy, kinetic
energy of internal motion, and surface potential energy for
a deforming drop can be a complicated process dependent on
internal and external flow patterns, internal and external
pressure gradients, variations in surface curvature, interficial phenona, and other effects.
However, for this
application, a reasonable description of the drop configuration as a function of time during impact can be obtained by
simple modeling of the important phenomena.
-
106
-
Constraints and Equations of Motion
Suppose the drop deformation can be approximately
described by a family of shapes.
A corresponding internal
flow field can be specified for the drop to describe a progression through the selected famil y of shapes.
The kinetic
and potential energies of this syst em c an be computed, because
the drop shape and internal flow fiel d have been specified.
The energy conservation principle can be used to determine
-1 the rate of exchange of energy betw een
the storage modes for
the system model under the geometri c constraint.
Consider a simple example of* this
techniqu .
dro p geome try throughout impac t be node led as a
lar cyl inder.
ight circu-
The cylinder axis and dr op center of mass
vel ocity a re perpendicular to the
F
Let the
i
npac t surface and a force
acts on the bottom of the drop as shown in Fig ure 5-1.
As the drop deforms, the height A
change while the drop volume
and the radiu
s
emains constant
V
3
V
=
Tra
6
(sphere)
1
(5-8)
2
(equivalent cylinder)
The cyl indrical drop is shown in a deformed configuration in
Figure 5-2.
The radius
R
of the disk which forms the bot-
tom of the drop (facing the wall) is equal to
1/2
R = A
2
-4-
1M
0 INGWRIMAR
-
X2
)(5-9)
(i~l
iil41
!N44i o"4
-
107
-
f
z cm
FIGURE 5-1 CYLINDRICAL MODEL OF DROP
EQUILIBRIUM POSITION
-
108
-
i
T
IF'
Zi m
/
I
r
so
,/7//
////
FIGURE 5-2 CYLINDRICAL MODEL OF DROP
DEFORMED POSITION
IN,
-
109
-
The position of the center of mass (measured perpend icul ar
The location of the bottom
to the impact surface) is zcm
of the cylinder
y
can be determined from the cente r of
mass coordinate and the cyl inder height:
y=
(5-10)
2
cm
The internal flow fie
which correspo nds to the assumed
geometry of deformati
is given by:
axial velocity
Uz
~
dzcd
dtcm
1
+ -
-
dX
1
dt
d
(5-11)
radial velocity Ur
The velocity
d zcm
dt
r
2
dX 1
dt
(2)
(5-12)
is the center of mass veloci ty (normal
to the impact surface) and the velocity
dt
is
the rate
of change of the cylinder height.
The kinetic and surface potential energies of the
cylindrical system can be computed :
These and other computations are given in detail in Appendix 5.
-
KE
-
(U + U ) dV
p
=
110
1
2~ Of
[/d
zcm-2
j
dt
(5-13)
dA+
d t)
2
I2
+
12
+
8
2
(5-14)
RE
=
a
A
(5-15)
dA surface
surface
=
a [2
A
A2 + 2Tr A22]
(5-16)
Equa tions of motion for the deforming cylinder are obtained by using these relations with the energy conservation
principle, Equation (5-7).
The resulting equations of motion
are:
F
pf V
=
F =-
dt
+ ((
1 2
pfV[
A2
3
+
8
+ a( Trr2 -
I-
I
4**M"".."pWO..W.".."**"O-
--
-
(5-17)
d zm
NPIN
M11110
oil IMIN
0 IN 11-1----
2
d2 d 1
dA
dX1
]
2
13
2 )
(1 )
(5-18)
(
IIWIIIIWI
,
-
111
-
Two coordinates are necessary to specify the cylindrical system configuration.
or
One shape coordinate, either
A1
A2 , determines the shape (since the second can be calcu-
lated from the known volume); one position coordinate, either
zcm
or
y, determines the location (since the other can be
calculated from the known shape coordinate).
A
and zcm
are used.
The two equations of motion can be
integrated to determine the cylinder height,
center of mass position
For this example,
zcm
Al and cylinder
as functions of time during
the impact.
Other families of shapes may also be described by
different sets of two coordinates.
example of another
A
sphere, shown in
two-coordin ate system is the truncate
Figure 5-3.
two-coordin ate system \
length, and
tion can be derived for a general
Equations
,
zcm),
where A 1
is a geometric
is t he cen ter of mass position. Note that
zcm
the equatio ns of motio n are derived on the basis of expressions for kinetic and po tential ene rgy.
between the mass cente r
on which th e force
that
6y
F
zcm
and the 1ocation of the plane
acts (the drop bottom) is needed so
can be deter mined in terms of
Later, the expression for th e force
depend on the drop bot tom radi us
separation
y,
R
for a drop with a fl
fore, in addition
A relationship
6 1
and
6z cm'
will be shown to
F
nd the drop-wall
disk bottom.
to the expression for
y,
There-
a general ex-
-
z~
112
-
cm
z
-cm
F
y
y
FIGURE 5-3 TRUNCATED SPHERE MODEL OF DROP
EQUILIBRIUM AND DRFOR'ED' POSITIONS
-
-
in terms of
R
pression for
113
X1is also needed. These relations can be represented in general form for a drop of
constant volume
=
KE
1i
-p-2
V:
d m
V
[
L
+
+ (
K( 2
d t
dt
dz
2]
)
(5-19)
,J
(5-20)
a
PE
= aa
Zcm
=
y + a M(
R
=
a N(
al
(5-21)
a
(5-22)
)
where the functions K(x), L(x), M(x), and N(x) are determined
(The dummy variable x
for a selected geometric constraint.
represents the ratio of the geometric length X. ,to the diameter a
6
of a sphere of the same volume
V,
1\/3
a
=
the
The general equations of motion for the two parameter
system with fixed volume
are:
d2 z
dt 2cm
P'f
FK(
+
V
[
aa L'(
(5-23)
X
a
X
d2 X
a )V
M'(
dt
dX
2a
a )
K
a
dt
2
J
(5-24)
-
114
-
These can be rewritten in form for integration:
d z
dt
d2
cm
2
d A1
F
pVy
.
= -
(5-25)
F M'
dt 2
1
+ oaL
a
+
p
_
22fa
K
KA' (
A1
a
a
d
'
it
(
a
3
[f
V K( Aal
]
(5-26)
The details of the derivations f or the expressions for the
kinetic energy,
potential energy , center of mass posit ion
(with respect to drop bottom),
and drop bottom radius for
both the cylinder and the sphere appear in Appendix 5, together with the derivation of th e equations of motion for
the general two-coordinate syste m.
These results are sum-
marized in Table 5-1.
An additional geometric constraint of some interest can
be introduced:
that the drop bottom maintain contact with
the impact surface.
The constra int for maintaining contact
is that the drop-wall separation be and remain zero:
y = 0
(5-27)
This implies a relationship between the center of mass posi-
DYNAMIC SCALING FUNCTIONS FOR TWO SHAPES
TABLE 5-1
SCALING
(CONDITIONS)
TRUNCATED SPHERE
CYLINDER
FUNCTION
K
C
C1 + C 2
1+ C2224x 3
31
C + C2
+ 2)2
)(
(
l2
c>
3(--
C
-4
8x
C2
1)
-
x
K'
-2c
3x
3
x<x
x
13+ 2)(
C2
4
(
1
x
(3
1/2
L
2nC 3 [-I-
+ (-)
L'
-1
2,fC3[-X-
+
1
(
1
1/2
]
(x +
M'1
0
N
( 6x
x
.87
1
(1
1
+ 2x
+ 2 C5 xC4
x4
)
2x2
1/2
x
3
1.0
1/2
3
1
1
no contact
C5 ~ 1
4
contact
C3(-C4 7
M
m
+ C5
2
7
T
xc
x
2
C3 (C4
)6
13 - 4)
_ 12 4
2
]
= 0.63
*
X
X
2
3x3
)]
=
5,
Cs = 2
-
tion
116
-
and the geometric length
zcm
Equation (5-21)
A .
y = 0,
With
becomes:
z
(5-28)
=a M( a
and the velocity and acceleration relations are:
d z cm
d
and
d2 z
dt2cm
=
=
A
a
a
Mi( 1
a
dA
( dt
1
dt
2
)
(5-29)
A
+ M'()
d2A1
(5-30)
dt2
Since the addi tional constraint of drop-wall contact introduces a known relationshir
between center of mass position
and geometric length, one equation of motion can be eliminated.
F
The force
can be eliminated by subtracting Equation
(5-24) from Equation (5-23), and the center of mass acceleration can be replaced by the right hand side of Equation
(5-30)
to yiel d the following equation of motion for drop-
surface contac
d2
dt2
{M
A
-
A1
a )Mi
+
a
a
Pf V
2~-
a
ja
~
lM'(
)
J
al
a
d
a
dt
2
+ K(
1
(5-31)
117
-
-
Equation (5-31) can be integrated, and the center of mass
velocity can be calculated from Equation (5-29) and the surface force
F
required to support drop-surface contact can
be calculated from either Equation (5-23) or Equation (5-24).
The integration of the equations of motion is the similar both with and without drop-surface contact.
If no con-
tact occurs, two equations of motion must be integrated to
determine the drop position and shape as a function of time,
given the external force
F.
For the case of drop-wall con-
tact, the additional geometric constraint reduces the twocoordinate system to a one-coordinate system, such that only
one equation of motion need be integrated.
The equations of motion,
derived from the energy con-
servation principle, provide that the total energy of the
drop EE (J):
(5-32)
+ PE
EE = KE
is conserved, except when reduced by the amount of work done
against an external force
(the drop does work against
through a displacement -6y
F
F
(EE - EE)
when y
-
decreases)
f F 6Y
=
0.
(5-33)
The two-coordinate system with constant volume is the
simplest model of the impacting drop which allows for both
center of mass motion and deformation motion.
____
-
-ft-.
!
More sophis-
-
118
-
ticated models might include additional position coordinates
(for motion in directions besides that perpendicular to the
impact surface), additional geometric parameters (for more
complicated shapes and variable volume), and/or additional
forces (in other directions at other locations).
The deriva-
tion of the equations of motion for the more elaborate system
would proceed in the same way:
1)
the derivation of energy
expressions in terms of the position and geometric coordinates (Xi , zi)
2)
the derivation of the relation between
the force 'displacement coordinates (yk)
ordinates (X., z ); and
3)
and the system co-
the determination of some
geometric parameters (Rm) which affect the magnitude of the
external forces (Fn):
VFK~j ~
KE
a.
...
L)
KE
X.
+
K
z.
,
(
dz.E
dt
dA.d
dt
.,
dt
(5-34)
PE =
aa 2 L(
(5-35)
a )
x.
S
Rm
aMk(
aN
(
z.
,
X.
1
)
(5-36)
(5-37)
-
119 -
No more than three orthogona
be chosen.
center of mass coordi nates can
The equations of motion can be derived from en-
ergy conservation principle.
of motion for this system.
There wil 1 be (i
+ j)
equations
-
120
-
Boundary Conditions
The equations of motion for the two-coordi nate system
model of the deforming drop can be integrated to determine
t he boundary (or,
the impact dynamics if
in this case,
in-
itial) conditions are sp ecif ied.
At the beginning of an impact, the drop is ini ti ally
undeformed (spherical).
For the drop models, the undeformed
or equilibrium position can be determined by minimiz ing the
potential (surface tensi on) energy function:
d PE
d X1
=
(5-38)
0
Xl1e
The equilibrium geometric lengths
Xle are shown in Table 5-
1 for the cylinder and truncated sphere.
These equilibrium
configuratons represent the drop shape with maximum symmetry
and minimum surface area, given a fixed volume
V
and the
geometric constraint on drop shape.
Three cases of drop deformation are discussed:
1)
drop oscillation in an open environment,
2)
drop impact close to a surface, and
3)
surface contacting drop.
For an oscillating drop, there
is no center of mass motion, and the drop is far from the
wall.
The drop is initially in its equilibrium position,
but has an initial deformation velocity.
The freely os-
cillating drop experiences no external force.
011101
-
Oscillating drop:
zcm
=
-
initial conditions
large
far from wall)
(5-39)
equilibrium position)
(5-40)
ale
d z cm
dt
dX I
dt
121
U1 10
=
U 2 ,o
= 0
(no center of mass motion)
(5-41)
(initial internal motion)(5-42)
For the impacting drop, the center of mass velocity is perpendicular to and toward a wall.
The drop is initially
undeformed and has no deformation velocity.
The initial
separation should not be chosen so large that substantial
integration time is spent prior to the beginning of deformati on.
Impacting drop:
zcm
=
d z cm
dt
dAI
dt
zcmo
1
cm
A1
-
initial conditions
0
(5-43)
equil ibrium position)
(5-44)
(initial center of mass velocity)
(5-45)
U 1o
2,o
ini tial separation)
= 0
(no initial deformation velocity)
(5-46)
-
122
-
An important distinction between these two cases is
the development of the deformation velocity.
For the os-
cillating drop, the deformation velocity is at a maximum
when the drop is in its equilibrium position.
For the
impacting drop, however, the deformation velocity increases
from zero (when the drop is in equilibrium position), to a
maximum, and returns to zero at the point of maximum extension.
The contacting drop can only be approached with a pre
determined relationship between the center of mass and deformation velocities, and of course the integration must be
performed for y = 0, i.e..at the surface.
surface contacting drop: initial contitions
cm
=
a M(
ae
le
dz cm
dt
dX
dt
=
M'(
U2 ,o
l,e)U
a
2,o
(drop -surface contact)
(5-47)
(equi librium position)
(5-48)
(cont act maintained)
(5-49)
(initial deformation
velocity)
(5-50)
One way to combine the impacting drop with the contact
position is to proceed with the integration of the equations
-
123
-
of motion for the impacting drop until the contact velocity
condition is reached:
d z cm
A d
=
(5-51
M( a
dt
dt
and then set y = 0 and proceed with the drop contact calcu
1ation.
The deformation dynamics for oscillating, impacting,
and surface contacting drops are not easily compared except at the point of maximum deformation.
In all three
cases the deformation velocity is zero at this point; for
the freely oscillating and surface-contacting drops, the
center of mass velocity is exactly zero at the maximum extension, and for the impacting drop it is approximately
zero.
Thus for all three cases, all or virtually of the
drop's mechanical energy is stored as surface potential energy at the point of maximum extension.
Therefore a com-
parison of drop dynamics for a given size and shape is
best done by selecting cases in which the maximum potential
energy of the drop (i.e. the total mechanical energy) is the
same.
For all cases considered, the drop is initia lly undeformed.
For a given size and shape of drop, the initial
potential energy is the .same for all cases.
Thus fixing
the total mechanical energy is equivalent to fixin g the initial kinetic energy.
- -_-1
-
EE
=
124
+
KE 0
fixed
fixed
RE0
(5-52)
constant
The initial kinetic energy of the drop in all cases can be
calculated:
KE0
=-
pf V (U,
For fixed values
,0
2 + K U2,o 2).
(5-53)
let the initial velocities be
K
evaluated:
oscillating drop
U1
=
0
(5-54)
KE
U2 ,o
1
=
(5-55)
V K
p
impacting drop
KE
U1
,0
U2
,o
0
=
(5-56)
21E
=
(5-57)
0
surface contacting drop
U
=
(5-58)
M' U2,o
KE
U2 ,o
(5-59)
f
V[(M')2
+ K]
-
125
-
Each of these conditions satisfies Equation (5-53) for any
specified value of KE0 , so that the dynamics of the three
cases can be compared for fixed energy values of a drop of
given size and shape.
-
126
-
External Force in Drop Motion Near a Plane Surface
As a drop approaches a wall through a gaseous medium
there is an increase in pressure between the drop and the
wall, because gas must be forced aside in a small space.
This effect is more pronounced if vapor is generated on the
wall side of the drop.
This increased pressure causes the
drop to begin its deformation before strik ing th e wall.
The derivation of the expr ession of the fo rce due to
the pressure rise between the drop and the wall
there are two major conbribution s to the f orce:
sho ws that
one due t 0
increased pressure required to accelerate the vapor in a
radial direction out from betwee n the drop and t he wall,
and one due to increased pressur e required to overc ome the
viscous drag associated with thi s radial f low.
An estimate of the magnitu de of the pressu 'e rise is
obtained by modeling the vapor flow field betwee
and the wall.
The simplest appr opriate model is
flow between two disks of radius
tance
y,
as shown in Figure 5-4.
R,
the drop
axisymmetric
separat ed by a di s-
One disk repres en ts the
flattened bottom surface of the drop, and the other
projection of the drop-bottom onto the wall.
radi us
R
and the separation distance
of time during the impact.
y
is the
The botto
will be functions
However, a qua si-steady flow
will be used to est imate the pressure rise between the drop
and the wall.
The quasi-steady flow will
later be as -
Ur (R)
WALL
R
FIGURE 5-4 STEADY AXISYMMETRIC LAMINAR FLOW BETWEEN
PARALLEL -DISKS
-
128
-
sociated with a quasi-steady heat transfer, both dete rmi ned
for an instantaneous configuration of the drop during the
course of its impact.
The mass continuity equation for steady uniform density flow between two parallel disks is:
aUr
+
r
ar
Ur
r
r
+
aU
z
3z
=0
wh ere
Ur is the radial gas velocity (m/s)
and
Uz is the axial gas velocity (m/s).
(5-60)
The appro pri ate boundary conditions are
Ur = 0 at z = 0 and z = y
(5-61)
(no slip at the impact surface or drop bott om)
U0 at z = y
U=
(5-62)
(uniform axial velocity at the drop bottom)
and
= 0 at z = 0
U
(5-63)
(zero axial velocity at the impact surface)
A solution (whi
satisfies the continuity equation) of the
following form
assumed:
Ur _ 12y r
U
z
=
-U
0
p'
Uo
p''( yz )
( z-),
y
(5-64)
(5-65)
where the function P( z ) must meet the boundary conditions:
y
INI"
-
129
p''(O) = p''(l)
-
(5-66)
0
p ' (1) = 1
(5-67)
p' (0)
(5-68)
=
0
Order of magnitude calcul ations show that the drop does not
begin to deform until it approaches very close to the wall,
satisfying the condition R >> y.
The momentum conservation
for this condition is:
Ur
P Ig
g( r
+
+
Ur
3r
3r
P+
3 2 Ur
3r
;z
y9
z
2
(5-69)
The pressure gradient in the axial direction is neglected,
and the radial momentum equation is integrated with respect
to the axial coordinate, after substitution of the velocity
relations in Equations (5-64) and (5-65):
PgU
pUo 2 1
4 r
p 22
I U..
@P+
0
2
p
1 2yr p
pd
r
y3
piU
z
y
z
y
(5-70)
-
130
--
Letting
1
1
I2
2
2
-
d
(5-71)
0
''' d(-
and
-
-)
(5-72)
the integration of Equati on (5-70) yields the integralaveraged radial pressure distribution1:
P(R)
- P(r)
With P(R)
[pU 0 (411 )
=-
+
p U
0
R2_
(4I21
R2y 2
2
(5-73)
P . the net force due to the increased pressure
between the disks can be calculated:
F
F
= f
2Trr[P(r)
2 4
p U0 R
-
P
(5-74)
]dr
r
y
U R4
(5-75)
y
The first term is the radial acceleration term, and the second
is the viscosity term.
The integrals
the assumed form of the function
p.
and I2 depend on
One possible form is
IThe radial pressure distribution is nonuniform, suggesting
that the bottom surface of the drop is not really flat. This
complexity was omitted from this analysis. Note also that
Pmax = 2F/7R2.
-
p(x) = x3
for which I
131
3- 1
2
-
x4
= .225 and 12 = 1.5.
The integration is given in Appendix
(5-7,6)
-
132
-
Evaporation and Heat Transfer Effectiveness:
Dry Impact
The heat transfer to impacting drops prior to wetting
or in non-wetting impacts can be simply estimated when the
dynamics of the impact and the boundary conditions are
known.
Prior-to integration of the equations of motion, an
important quantity must be specified in order to evaluate
the external force:
drop bottom.
the velocity of the gas normal to the
If no evaporation occurs, this would be taken
as the velocity of the drop bottom itself.
However, with
evaporation, the gas velocity at the drop bottom is related
to the rate of vaporization, and hence to the heat transfer
to the drop.
A simple estimate of the rate of heat transfer Q (J/s)
TrR 2 ,
between two disks of area
at temperatures
Tw
and
where
k
- T
w y
T
k 9 r R2
g
y
(
(5-77)
is the thermal conductivity (J/s-m-C) of the
medium between the two disks.
In the case considered, the
medium separating the two disks is a flowing gas, and the
temperature distribution between the two surfaces is nonlinear.
y,
Ts(C) respectively, is:
2
O
separated by a distance
The factors sl and 62 are introduced to account
for the nonlinearlity in the temperature distribution, so
that the heat removed from the wall is:
-
M
-
133
-
Tw -Ts
S$
1 kg
(5-78)
7TR2
and the heat transferred to the drop bottom is:
-
Q2
2T - T
sT.
wr
k TR2
2
(5-79)
Because the flowing fluid carries heat with it
as it
f 1ows
out from between the drop and the wall, the heat trans ferred
to the drop is less than the heat removed from-th e wal l;
that is,
2 <
The factors
1,
3
or
2 < 6 .
and
62 depend on the flow field between the
drop and the wall, and on the superheat group:
c
CT
=
(T - T )
h'g
w
s
hfg
(5-80)
They are evaluated in Appendix 5 for the same flow field
used in the derivation of the extern al force due to pressure
rise between the drop and the wall.
As for the pressure
calculation, the heat transfer calcula tion
is performed for a quas i-
static system with the flow assumed steady.
For the axisym-
metric flow considered, the heat tra nsfer from the wall is
always greater
than the linear appr oximation, and the heat
transfer to the drop is always less (for a fixed temperature difference Tw - Ts);
The factors
8I and
s2 ,
that is
l
< 1 and
have been calculated
2
'
-
134
-
and curve fit as functions of the superheat group CT. For
the range:
0 < CT
< 1
the relations
(5-81)
(1 +
2 CT)
and
1 + .8CT
(5-82)
(11 +2
+ T CT)
provided a curve fit
about 3% or better.
superheat group
less than 1.
CT
of the
If all
used for evaporation
Typically,
t transferred to the drop bottom is
he vapor gene ration rate W (kg/s) is:
h2
hfg
where
is the latent heat of vaporization
hf
the
(5-83)
(J/kg)
The va por velocity associated with this vapor generati on rate
is, wi th Equation (5-79) :
U
v
=
W
9
p TrR2
)
32 k (T - TsT)
pg hfg y
(5-84)
-
135
The resultant gas velocity at the drop bottom,
the sum of the vaporization velocity
Uv
drop bottom) and the drop bottom velocity
U
=
+
U
U0 ,0 is
(relative to the
U :
(5-85)
U
The pressure force expression, Equation (5-75), can
now be evaluated for the flat bottom evaporating drop model.
The total heat Q (J) transferred from the wall during
an impact period
T
is the time integral of the instantan-
eous heat transfer rate:
Q
Q
(5-86)
dt
The drop heat transfer effectiveness (from the wal 1 side) is
the ratio of Q1
6
l
QI
pf V h
to th e latent heat of the drop: (with Eq (5-78))
k (T
- T s)
Pf V hfg
fT
2
y
dt
(5-87)
The heat transfer effectiveness is calculated from the time
integral of an instantaneous quasi-static heat transfer rate
which is re-evaluated at small time intervals during the
dynamic
mpact.
role in
he calculation, as is evidenced by the appearance of
The dynamics of the impact play an important
the drop bottom radius R and the drop-wall separation
Equation (5-87).
y
in
-
136
-
Nondimensional Equations
The use of the dimensionless
ness
c
heat transfer effective-
in the data reduction scheme greatly simplified the
interpretation of the heat transfer measurements.
Approp-
riate introduction of scaling parameters for the purpose of
rendering all dynamic variables dimensionless can also simplify the interpretation of the drop dynamics model.
The
latent heat of vapori zation of a drop, which effectively
scales the drop heat transfer, is much larger than the
mechanical energy whi ch the drop has in the form of either
kinetic or surface potential energy.
Therefore, the latent
heat is not useful in scaling the dynamic variables.
are, however
combined to
There
three other simple parameters which can be
ondimens ionalize all the variables used in the
dynamic drop model.
They are:
the diameter of a spherical drop of volume V (m)
the liquid density (kg/m3)
and
a ch aracteris tic vibration period (s).
For a drop of volume
a
and
c
V,
=
(
6V
T/3
)
3 1/2
f a
(5-88)
(5-89)
Ilk
-
137
-
a and pf is equivalent to the use
(The use of Tc with
a with a and Pf, since only a is needed in addition to
and pf to determine Tc.
However,
T
was chosen as a
scaling parameter because the impact time in particular
of interest).
The nondimensionalizing of dynamic variables is outlined in Table 5-2.
The equations of motion,
the boundary conditions,
t ogether with
force e xpr ession, and heat trans-
fer effectiv eness are now rewrit ten with new,
al variables .
The dimensionless variables have the same
symbol as th eir dimensional coun ter -part;
is replacing
n on-dimension-
,(both
e.g.
dim ensional).
a and X
X(dimensionless)
When the
equations of motion are rewritte n i n terms of dimensionless
variables,
s everal dimensionless groups appear as scaling
factors for various terms in the equations.
are named and defined in Table 5-2.
These groups
The dimensionless
equations of motion, force, and heat transfer effectiveness
are:
d2 Z2
m
F
F
.
(5-90)
V
dt 2
dX
2L
[F M'
d2A
+
+
dt
26
V K'
VK
(-dt
2
]
(5-91)
dt
2
F
=
16
TH2 I (1 +
U
U
.(1
+~Y-)
U
Uv
+ S2 TH VI
4
R4
4Y
y4
12
(5-92)
-
TABLE 5-2
138
-
DIMENSIONLESS DYNAMIC VARIABLES AND GROUPS
dimensionless variable replacing ratios of dimensional variables
length
a
t
time
T
F
force
pa a)
'r2
KE
(or PE)
KE5energy
Pf a
2
dimensionless groups replacing combinations of dimensional
constants
0
RHO
WE
9
density ratio
Pf
pf U2a
2
Weber number
1/2
VI
ga
viscosity group
k9 (T -T
TH
\
h
1
1/2
pg aa
conductivity group
CT
c p (Tw -Ts)
hfg
superheat group
INWI
-
1/26
=
139
THJ
(RHO)
2r
(5-93)
y
0
where
2
6 =
(1 +
-
2
(5-94)
T
CT
1 + .8 CT
(1 +
2 CT)
1
(5-95)
and the initial conditions are:
oscillating drop
(5-96)
large
=
zcm
1
(5-97)
e
dz cm
(5-98)
0
-
dt
dA I
7T
T
dt
(WE
1/2
(5-99)
\K
impacting drop
zcm
xI
(5-100)
= Xicm,o
e
(5-101)
x~
=
dz
T=
dt
1/2
(WE )
(5-102)
dAX
-
dt
---
pj"i-pp
(5-103)
0
--
N-f *-qi-
B -Iljllqqq
-
140
-
surface contacting drop
zcm
=
M(X1
(5-104)
)e
(5-105)
X1
e
1dX
dz cm
dtA
dX
1
dt
(5-106)
dt
,1/2
(
_
4
Note the use of the fixed Weber
WE
[ (M') 2 + K]
)
(5-107)
number in eva luating all
velocities, such that the ratio of init ial kinetic energy
to initial (equilibrium) potenti al ener gy is constant for
all sets of initial conditions.
In order to simplify the computat ions of drop deformation dynamics for the various condi tions and fluids of interest, some characteristic dime ns ionI ess groups are defined.
The useful dimensionless group is calculated from
the characteristic value by mult iplyi ng by appropriate ratios
This procedure is
of actual to characteristic para meters.
outlined in Table 5-3.
In this way, for example, a calcu-
lation is performed for several drop di ameters (all else constant) by simply introducing sev eral di ameter ratios.
drop diameter appears in three d imens io nless groups.
temperature variation of gas den sity
p
g
The
The
is also accounted
for in an approximate way by introducing a temperature ra tio,.
TABLE 5-3 CHARACTERISTIC DIMENSIONLESS GROUPS AND PARAMETER RATIOS
CHARACTERISTIC GROUP AND
PARAMETER RATIOS
OBTAINED
FROM
PARTICULAR
GROUP
S9
9, s
Pf
*9
Pf
pg,s
-
RHO
RHO
RR
2
2
a
WE
k (T
9
v 2
1/2
pPfcaa)
p g' aac
VI
V
- TS)
S
h fg
1
(1
p gcaa
1/2
k Ts
(Tw -T s)
hfg
CT
ac
-
a
1/2
pa
Pga9
1
1
Ac
1/2
RR
1
_
P
)
- T
T
1/2
aa
T
.
TR
Ts
Tw
TS
hf
Ts
CTc
TR
1/2
1/2
p
1
THc
c
AR
1/2
p
1/2
hfg
TH
cP
c 2
UR
-
WEc
2
2
U
PfUcac
PfU a
1/2
-a~I
1/2
1
1/2
-
142
as described in Appendix 5.
-
Thus the characteristic groups,
which depend on fluid properties and some arbitrarily selected parameters, need not be recalculated for each set of
new parameters, but only multiplied by the appropriate parameter ratios.
"limp0 go
"NOWNINION
__ ____
--
I
-
---
-
143
-
Dynamics of Dry Impacts: Model and Data
The equations of motion for the two-coordinate model
of the deforming drop have been integrated for a variety of
conditions.
Property data are given in Appendix 5.
A
range of drop sizes and surface temperatures were considered.
Two different shape constraints were used: the truncated
sphere and the right circular cylinder.
sphere,
oscillating, impacting,
For the truncated
and surface contacting
cases were examined; for the cylinder, oscillating and
impacting cases werB considered.
Most cases were calculated
for water at atmospheric pressure; one set of calculations was
performed for nitrogen over a range of temperatures, using
the cyl indrical
is well
model.
The dynamic behavior of all systems
behaved and results compare favorably with details
taken from Wachters ' [33] photographs of impacting drops.
The heat transfer c alculation yields the correct order of
magnitude for drop heat transfer effecti veness according
to data from two significantly different
ments also by Wacht ers [33, 34],
able data,
no final
types of measure-
but due to limited avail-
conclusion may be drawn.
Several of the interesting results of the dynamic
model calculations are presented in Figu res 5-5 to 5-22.
One test of the sui tability of the model ing is the predicted
value of the period of free oscillation.
These models are
appropriate only for the compression hal f of the oscilla-
-
144
-
tion period, so a half-oscillation (equilibrium position
to maximum deformation back to equilibr ium position) was
calculated.
period
T(s)
The ratio of th e c alculated vibration hal f t o the characteristic period of oscillation
-c
is plotted in Figure 5-5.
For both the cylinder1
and the
sphere, above a Weber number of about 5, the ratio is about
0.5 as i t sho ul d be.
The impact periodwas also calculated
for the cylin der and the sphere,2 and is shown in Figure 5-6
together with rough data tak:en from Wachter's photographs
showing remar kably good agreement.
It was found that the
Weber number is the single most important model parameter
for determini ng the period T, and results did not change
noticeably with large changes in surface temperature, drop
size,or veloc ity at fixed Weber numbers.
calculated for the deforming drop model
function of Weber number.
The impact period
is not a strong
The calculated impact period
3
-Eis approximately 60% of the characteristic vibration
period Tc for Weber numbers between 10 and 100.
1 Most
of the cylinder calculations were done with the surface area reduced by a factor of .87 so that the potential
energy of the drop in its equilibrium position was the same
as for a spherical drop of the same volume.
2 For
the impacting sphere, a minimum drop bottom radius of
R =.laL was used as an initial drop bottom area to scale the
external force F. The choice of a minimum area was necesary for the calculation, but the selected value of the
minimum area did not affect the calcualted results.
HH,
-
145
-
Drop size at maximum extension is plotted as a function of Web er number for oscillating drops and the surface
contacting drop in Figure 5-7. The maximum drop extension
2Rma
not
vary with independent changes
ratio, 2Ra x, ~- does
in drop siz e velocity, temperature, fluid, or even deformation condit ions,
(impacting or oscillating), at fixed
values of t he Weber number.
photos
Again data from Wachters'
sho ws that the model is quite effective in pre-
dicting the maximum extension.
The data point taken from
Wachter's photo's at WE = 41 is for an impact angle of 300
(from norma 1).
The velocity used to evaluate the Weber
number is the normal component.
It is evident from Figure
5-7 that had the total velocity (giving WE = 56), or any
other veloc ity been used, the data point would have
appeared to be out of place.
component
0f
It is important that the
velcoity normal to the impact surface be used
to evalua te the Weber number for this type of dynamic
modeling.
Figure 5-7 shows the expected increase in
maximum extension with Weber number.
Larger deformation is
required for drops with greater kinet ic energy because at
3 The
impact period can be calculated for these models only
in the compression part of the deformation: that is, only
for the flattening against the wall, but not for extension
away from the wall. The impact period was determined from
the difference in time between an arbitrarily chosen 1%
initial deformation (Xl~ .99X ) prior to maximum deformation, and the return to that hint after maximum
deformation.
0,7
0,6'
H
0.5 -
==
$~~~~~~~~
L
0.4. -
Fl-
0.3 (-
CYLINDER:
S0.2
2
2 xr
A
bIA
A A = 0,87XfA
01-
0
0
.1
SPHERE
110
WEBER NUMBER, WE
FIGURE 5-5 FREE DROP OSCILLATION PERIOD
100
.. l.
-
147
-
1,0
e0
0,8 F
U
H
1-'
"* 6---A-0 -....
0,6 H
x
LU
0~~
x
H0~~
0.4
a = 2300 pm
0,2
0
a = 220 im
A CYLINDER
A CYLINDER
X FROM WACHTERS' 0 SPHERE
* SPHERE
PHOTOS [33]
(SURFACE CONTACT)
10
WEBER NUMBER, WE
FIGURE 5-6 DROP IMPACT PERIOD
100
-
b
A
148
-
CYLINDER
o SPHERE
*SPHERE (SURFACE CONTACT)
XFROM WACHTERS' PHOTOS [33]
5
-
a = 2300 pm
Tw-Ts =400 C
4-
eA
CD)
Lu0
3e
x
S2*
2x
0
1
10
WEBER NUMBER, WE
100
FIGURE 5-7 MAXIMUM DROP EXTENSION
--
-o"
i
11,11 1 1111111IN
I OR-I,--------- --
-
----
---
- - -----
-
149
-
maximum deformation, most or all kinetic energy has been
converted to surface potential energy and is stored in the
extended surface.
The predicted maximum drop extension radius is
consistently slightly larger than the observed extension.
In Wachters-' photographs, the drops at maximum extension
do look very much like a flattened cylinder, except that
there is an indentation at the center of the cylinder.
This additional area in the indentation is not accounted
for in the cylindrical model.
The cylindrical model must
show a larger extension to have the same surface area as
the deformed drop with the indentation.
Calculations performed for the surface contacting
drop show both a larger impact period, in Figure 5-6, and
a larger maximum extension radius, in Figure 5-7.
This is
because the surface tension was evaluated so as to exclude
the surface contact area between the drop and the wall.
Thus the restoring force of surface tension is reduced,
giving a longer impact period, and a greater deformation
is required to store all the initial kinetic energy as
potential energy at the maximum extension.
The calcula-
tions for the surface contacting drop were performed as
an exercise in dynamics.
If
a small drop, with a Weber
number in the range considered, does wet a surface, it does
not bounce off.
The model does not account for forces
150 -
-
associated with liquid-sol
wetting.
The minimum separati
distance between the drop and
the wall during i pact is plo tted as a function of Weber
number in Fi gure 5-8 and wall superh eat in Figure 5-9.
The
difference in the cal cul ated minimum separation value for
the two shapes co nsidered is greater than the variation
with Weber number or wall
sup erheat.
The significance of
this obser vati on is discu ssed after considering a few more
details of the dr 0 p dynamics.
The,.d rop experiences a maxi-
mum force at the minimum sepa rati on distance.
The maximum
force is plotted as a fun ctio n of Weber number in Figure
5-10,
and does no t change
wi
t h wall
temperature.
The
maximum force 1 is not sig nifi cantly different for the
sphere and cyl ind e r model s.
T
between
maximum vapor Reynold s number, RE, for the flow
e drop and the wall, is plotted as a function of
Weber number in Figure 5-11.
The Reynolds number increases
with increased Weber number and wi
increased temperature;
the maximum Reynolds number is abo
the same for both the
1 The
maximum force can be used to calculate the maximum
pressure which the drop experiences P
= 2F
/7rR . For
the spherical model with water a 1 atf11pherema9t a Weber
number of 100, P
~ 130 psia, and at WE = 10 P
~ 10
psia. This presT9e rise is large enough to affM9 the
saturation properties of the fluid. However the duration
of the maximum force is extremely brief, and the average
force is typically a factor of 100 or more lower than the
maximum, so the model is left with constant saturation
properties. The calculation of the maximum pressure is
outlined in Appendix 5.
-
151
-
A CYLINDER
0 SPHERE
10-2
E
0
C)
10220 ium
TwTS = 264 C
a =
H20, ATMOSPHERIC
1
PRESSURE
10
WEBER NUMBER, WE
100
FIGURE 5-8 MINIMUM DROP - WALL SEPARATION VS WEBER NUMBER
-
152
-
H2 0, ATMOSPHERIC
PRESSURE:
A CYLINDER
o SPHERE
N2,
10-2
ATMOSPHERIC PRESSURE:
A CYLINDER
A0000e
A
E
HLLJ
C/O
00
0
10~ 3
220 uim
a =
WE
O,1
WALL SUPERHEAT RATIO)
FIGURE 5-9
=
25
1
(TWTs)/Ts
MINIMUM DROP - WALL SEPARATION VS WALL SUPERHEAT
-
153
-
H2 0, ATMOSPHERIC PRESSURE
a = 220 ulm
10 3
x
CL
x
A*
102
C-
aLL.
LJ
-i
101
CYLINDER:
--
A/
+ Tw-Ts= 132 C
A Tw-Ts = 264 C
x Tw-Ts = 660 C
SPHERE:
o T -TS
=
264 C
10
10
WEBER NUMBER, WE
FIGURE 5-10 MAXIMUM EXTERNAL FORCE
100
-
154
-
10-
8-
a CYLINDER
a = 220 pm
H20- _TMOSPHERIC PRESSURE
0
110
100
WNEBER NUMBER., WE
FIGURE 5-11 MAXIMIM VAPOR - FLOW REYNOLDS NUMBER
-
155 -
cylindrical and spherical drop models.
The Reynolds number
is given by:
RE
=
(5-108)
TH
(The derivation is given in Appendix 5).
The maximum
Reynolds number is at the minimum drop-wall separation.
The calculated Reynolds number does not exceed about 10,
which justifies the assumption of laminar flow between the
drop and the wall.
Details of a typical impact for the
cylindrical drop (water at 1 atmostphere, a = 220 pm,
T, -Ts = 264K,
5-16.
WE = 25)
The cylinder height is given as a function of time
in Figure 5-12.
5-13.
are given in Figures 5-12 through
The cylinder diameter is given in Figure
The drop-wall separation is given in Figure 5-14.
The external force on the drop bottom is given in Figure
5-15.
The time dependence of the heat transfer rate is
given in Figure 5-16.
In Figures.5-12 and 5-13 it is
evident that the deformation begins somewhat slowly.
How-
ever, in Figures 5-14 and 5-15 it is shown that the minimum separation and maximum force occur at the beginning of
the deformation process.' It is this initial large force
that starts the deformation process.
There are three
minima in the drop-wall separation, and three corresponding
peaks in the force during the impact.
The first and most
extreme initiates the deformation at the beginning of
-
impact.
156
-
The second reduces the drop momentum in the first
half of the impact.
The third increases the drop momentum
in the opposite direction as the drop rebounds away from
the wall during the second half of the impact period.
The
heat transfer rate, in Figure 5-16, also shows three peaks
at the same locations.
However, the heat transfer rate is
much more uniform than either the force or the drop-wall
separation.
All of the dynamic calculations exhibited
similar behavior.
In Figure 5-17, drop bottom radius profiles are shown
for three models.
Note that the cylinder begins the impact
with a finite area botto m, whereas the sphere begins
actually begi ns with zer o bottom area, though a small area
is arbitraril y assigned so that the external force can be
calculated.
It
is this difference in initial drop bot tom
area that res ults in sig nificantly different drop-wall
Drop
separation distances for the cylinder and the sphere.
bottom radius profiles f or the spherical model are sho wn
for two Weber numbers in Figure 5-18.
The model sugge st s
the larger Weber number has a shorter impact period.
Data fo r drop exte nsion as a functio
from Wachters '-photograp hs, are pl otted wi
of time,
taken
the calculated
cylinder radi us for the same condi tions in 'igure 5-19.
An arrow marks the end of the compression half of the
impact, and the beginning of the drop extension away from
-
157
-
1,0
H20,
ATMOSPHERIC PRESSURE
a = 220 pm
WE
25
=
T-TS= 264 C
0,8
(CYLINDER)
0,6
LtJ
"Z:
U.J
CD)
0,4
0,2
0 1
0
0,2
0,4
TIME,
0.6
0,8
t/Tc
FIGURE 5-12 DROP THICKNESS DURING IMPACT
-
158
-
2,0
1,6
v) 1.2
0.8
0,4
0,2
0,4
TIME,
0,6
0,8
t/Tc
FIGURE 5-13 DROP BOTTOM RADIUS DURING IMPACT
-
159
-
0,10
0.08
2 0,06
-
0,04
CL-
220
WE = 25
a =
0.02
um
Tw-Ts = 264 C
(CYLINDER)
H 0, ATMOSPnERIC PRESSURE
0
I
0
t1
0,2
I
u
I
0,6
0,4
TIME,
I
0,8
t/tc
FIGURE 5-14 DROP - WALL SEPARATION DURING IMPACT
-
160
4100
(CYLINDER)
H2 0,
~.?u
-
ATMOSPHERIC PRESSURE
a = 220 pm
WE = 25
T -TS = 264 C
300
-
LL3 200-
LLJ
>
100
0
0
0,2
FIGURE 5-15
0,4
TIME, t/Tc
0,6
0,8
EXTERNAL FORCE DURING IMPACT
-
161
-
200
(CYLINDER)
H20, ATMOSPHERIC PRESSURE
a = 220 um
WE = 25
150
T -TS
264 C
=
0D
100
LJ
L50-
50
Li
t
0
0
0,2
A-I
0,4
TIME,
0,6
0.8
t/Tc
FIGURE 5-16 HEAT TRANSFER RATE DURING IMPACT
-
162
-
xI
0.6/
_/
-0,4-
-0,4
-0,2
0
0.2
0,4
TIME, (t-tC)/ [
FIGURE 5-17 DROP BOTTOM RADIUS PROFILES FOR THREE SHAPES
,
Ww*"m
-
163
-
x
0,6-
S0,4-
0,2-
-0,4
0
-0,2
TIME,
0,2
0,4
(t-t c)/c
FIGURE 5-18 DROP BOTTOM RADIUS PROFILES FOR
TWO WEBER NUMBERS
-
164
-
3,5
WACHTERS'
PHOTOS [33]
FROM
WE
=
WE
WE
75
3,0 F
=
=
75
15
a = 2300 4m
Tc = 0.011 S
TW-TS= 300 C
ARROW MARKS END
OF COMPRESSION
2,5 F-
2.0 H
/
1.5 F-
/
1,0
I
I
I
I
I
-0,2
TIME,
I
I
0,2
0.4
I
I
0,6
t/te
FIGURE 5-19 RADIAL DIMENSION DURING IMPACT:
MODEL AND DATA
..
..........
maMIN1m1
-
the wall.
165
I
-
The simple cylindrical model
does a remarkably
good job in estimating drop size during the compression
phase of the impact.
Drop heat transfer effectiveness for water drops at
I atmosphere, diameter a = 220 yrm, wall
superheat Tw - Ts
264K, is plotted as a function of Weber number in Figure
5-20.
In spite of significant differences in the dynamics
of the two shapes considered (cylinder and truncated sphere),
the values for heat transfer effectiveness are reasonably
close.
The heat transfer effectiveness is an integral
result of a calculation in which a given value of impulse
( fF.dt) is required to cause the drop to rebound.
The
shapes considered predict about the same total time required,
and though the detailed time history of the forceseparation,
and shape are different, the integral results (such as heat
transfer and impulse) are about the same.
It is expected,
then, that almost any reasonable shape would give satisfactory results.
Drop heat transfer effectiveness is shown
as a function of wall superheat ratio for both water and
nitrogen (1 atmosphere, drop diameter a = 220 pm, and
Weber number WE = 25) in Figure 5-21.
The effectiveness
increases with both temperature and -Weber number as expected.
The effectiveness for nitrogen is significantly larger than
for water primarily because the density ratio RHO =
g/Qf
is larger for nitrogen and the square root of RHO appears
-
166
-
appears directly in the expression used to evaluate the
effectiveness (Equation
(5-93)).
In Figure 5-22, heat
transfer effectiveness (cylindrical model only) is shown
as a function of temperature for th ree drop sizes at
constant Weber number.
ments [33,
Data points from Wachters'
34] are also shown.
measure-
The analysis predicts the
correct order of magnitude for heat
transfer effectiveness.
More data are needed for a rigorous comparison.
-
H2 0
167
-
ATMOSPHERIC
PRESSURE
a = 220pm/
0,2 -
(ciJ
c:,
...-- -. -AT
LiU
01
/
--
ULU.
LlU
T-Ts= 264 C
A CYL INDER
0 SPH ERE
Tw- Ts = 660
A CYLINDER
. SPHERE
1
10
WEBER NUMBER., WE
C
100
FIGURE 5-20 DRY IMPACT HEAT TRANSFER EFFECTIVENESS
VS WEBER NUMBER
0 SPHERE
cD
w
0 ~
0,4
A N2,
ATMOSPHERIC PRESSURE
CYLINDER
A
A
LUL
A0
WE
0 1--0
0
.25
.50
.75
1.00
1.25
= 25
1.50
1.75
WALL SUPERHEAT RATIO, (Tw-Ts)/Ts
FIGURE 5-21
DRY IMPACT HEAT TRANSFER EFFECTIVENESS VS WALL SUPERHEAT
+ a = 60 4m
0.8
a = 220 y m
x a = 2300 pm
WACHTERS [34]
@WACHTERS [331
0.6 ~'x
C
WE ~ 25
H2 0,
uj
0.
ATMOSPHERIC PRESSURE
-J
"0.2
-
x
xx
0'
100
200
300
400
WALL SUPERHEAT
500
Tw~TS
600
(C)
FIGURE 5-22 DRY IMPACT HEAT TRANSFER EFFECTIVENESS: MODEL AND DATA
700
-
A Simplified Model:
170
-
Dry Collision Heat Transfer
The remarkable regularity of the modeled dynamics of
deforming drops in a dry collision, coupled with the observation that the heat transfer effectiveness is an integral
quantity showing little sensitivity to arbitrarily chosen
details such as deformation shape, suggests the derivation
of a simplified model for dry collision heat transfer.
The average force on the drop during the collision
time
T
drop.
must be sufficient to reverse the momentum of the
If the impact time
T
is some fraction C2
of
Cc'
then in dimensionless variables, the average force is:
(5-109)
2
or in terms of the Weber number
F
F=
T22
12 C
E) 1/ 2
WE2
The drop-wall separation
y associated with this force
for a drop bottom radius
R
(5-92),
-4
y
with -
F,
is determined from Equation
U << U :
Uv- = 0
si nce
2 TH 2 1~
+ 62 TH VI 12 ]i'R
=
(5-110)
(5-111)
The maximum drop bottom radius of the deforming drop can be
calculated for any shape by assuming all initial kinetic and
potential energy is stored as surface potential energy at
maximum deformation:
MIM
-
171
PE max = KE
For the cylindrical model,
-
+ PEO
(5-112)
.
wi th the Weber number greater than
1.741 (again in dimensionless variables), the maximum extension radius is:
(1 +
R2
acos(
12)cos2
2
(5-113)
12
This value of
R
can be used to evaluate
'.
The drop heat
transfer effectiveness is given by Equation (5-93); substitution of the characteristic values of
period
T = C2 rc,
R
and
y
for a time
the simplified version of the effective-
ness is:
3Tr
E1
~~
g
RHO a TH
R2
C2
(5-114)
The dynamic calculations suggest
a value of .5 to .6 for C .
2
Calculated values for drop heat transfer are shown as
functions of Weber number and wa 11 superheat in Figures 5-23
1 If
the initial shape is assumed spherical, a certain minimum kinetic energy is required to account for the difference
in surface energy in the undeformed spherical and cylindrical drop. For a drop of the same volume, the cylinder shape
has more surface area than the spherical shape. For the
derivation of the expression for R, see Appendix 5.
-
and 5-24, respectively.
172
-
The simplified model gives a
higher val ue for effectiveness, particularly at high Weber
numbers.
However, the simplicity of the calculation recom-
mends this method
for a quick estimate of the heat trans-
fer.
All of the heat transfer analysis is based on heat
removal from the surface area directly beneath the drop.
The sizeable vapor flow rate out from the space between the
drop and the wall is expected to provide added heat removal
from the surface area near, but not directly shadowed by the
drop.
Wachters
[33] included a factor between 1 and 2 to
account for this effect.
-
0,5
173
-
DYNAMIC MODEL:
a CYLINDER
o SPHERE
+ SIMPLIFIED MODEL
0,4
a = 220 ,1m
T-Ts= 264 C
H2 0,
x
ATMOSPHERIC PRESSURE
-
0,3
+
0,2
0
U-
0.1
++
0
1
10
WEBER NUMBER. WE
100
FIGURE 5-23 SIMPLIFIED DROP HEAT TRANSFER EFFECTIVENESS
VS WEBER NUMBER
0.4
I
CYLINDER
SPHERE
SIMPLIFIED MODEL
x
0.3
SIMPLIFIED-
0.2
15
-SPHERE
....--
0.12
220 pm
a =
WE
000,
0
0
FIGURE 5-214
.25
=
25
H20, ATMOSPHERIC PRESSURE
.50
.75
1.00
1.25
WALL SUPERHEAT RATIO, (Tw-TS)/TS
1.50
1.75
SIMPLIFIED DROP HEAT TRANSFER EFFECTIVENESS VS WALL SUPERHEAT
Nib,
-
175
-
Heat Transfer With Surface Wetting
When two large bodies, each at a uniform temperature
Tw
and
Tf
respectively, are brought into contact, the
interface temperature
T.(C) is
(Tw - Tf)
T.
where
-
(5-115)
RT + 1
Tf
is a thermal property ratio:
RT
1/2
RT
=
Pf
kf
kw
(5-116)
Pw Cp w
The interface temperature is assumed instantly and remains
constant as heat flows from the hotter body to the cooler
body.
a time
The heat transferred per unit contact area, q, after
t1 is
q
=
1/2
2 (T
- Tf) (kfpfP
(5-117)
f t0 /7T)
(See e.g. [501.)
Though the liquid drop is by no means an infinite body,
and the target has some nonuniform temperature distribution, this approach~is used in estimating heat transfer to
a liquid drop which wets a surface (e.g. Illoeje [6]).
is often not as inappropriate as it
may seem,
This
because bubble size
associated with initial nucleation at moderate superheats
-
176
-
(> 10C for water at 1 atmosphere) is usually much small er
than the drop size, and the times as soc iated with superheating prior to nucleation at mod era te superheats are short
compared with the time required to propagate a temperature
change through one drop diameter, so that the drop is effectively a "large"
body.
liquid temperature
Tf
In post dryout dispersed flow
the
is the sat uration temperature
Ts(K).
The conduction time prior to initial nucleati'on was
calculated by Illoeje [6] based on the time dependent
temperature profile for two semi-i nfinite bodies and the
saturation temperature at the bubb le pressure.
The pres-
sure of the vapor in a bubble is larger than that in the
liquid because of the added force of surface tension.
nucleation, the liquid and vapor are
For
a higher temperature
than the saturation temperature corresponding to the liquid
pres sure.
Smal ler bubbles requi
time before i-ni tial nucleation
1arger
(sec)
superhe ats
The
is given by Illoeje
[61:
/
0
and the bubble
2
.24 pg hfg/
size b0
= 1.06
Pfc f
kf
T
Ts
T.i-T
)2
,
(5-118)
( prior to growth) is:
kft0
( f c ,f
) 1
(5-119)
oil
-
177
-
These functions are shown, for water at atmospheric pressure, in
Figures 5-25 and 5-26, respectively.
Bubble growth in a
nonuniform temperature field, corresponding to the profile
in the semi-infinite body has been analyzed by Mikid [51].
The heat transferred to the liquid by conduction from the
hot surface is then transferred (by conduction) to the
liquid-vapor interface of the bubble nucleus
oration takes place.
where evap-
The bubble radius b(m) has been cal-
culated as a function of time.
The introduction of a dimen-
sionless bubble growth group
BB simplifies the interpreta-
tion of the bubble growth.
BB
p h
b
=
s
(5-120)
1/2
ff
The bubble growth as a function of time is then given by:
BB
BBt=
(
1/2 1t -
1
t0-
-
1/2
t
t(
This function is plotted in Figure 5-27.
t
equal to the conduction time
bubble radius is .58
to
)]
1/2-
(
12
(5-121)
Note that at a time
prior to nucleation, the
of its maximum.
This shows that the
bubble growth time is comparable to the conduction time prior
to nucleation.
bmax
max
The maximum bubble radius bmax is:
T.
-
T
h Ts
T
Pg hfgff
//2
Pfc k to)
.
(5-122)
-
178
-
10~
10-2
10~ 4
10~5
10- 6
10
1
100
INTERFACE SUPERHEATJ T -T3 (C)
FIGURE 5-25
NUCLEATION AND EVAPORATION TIMES
-
179
-
H2 0, ATMOSPHERIC
o
PRESSURE
05 -
Lu
10-6-
10
INTERFACE SUPERHEAT, Ti-TS (C)
FIGURE 5-26
INITIAL NUCLEATION BUBBLE SIZE
100
1.00
0.75
CD
0.58
0.50
CD
Lu
LJ
0.25
01
10-2
10~1
101
100
TIME,
102
103
t/t
FIGURE 5-27 BUBBLE GROWTH IN NONUNIFORM TEMPERATURE FIELD
W
I
-
181
-
This calculated value of maximum bubble radius, with substitution of the waiting time
to,
does not depend on wall
superheat.
An estimate of the total time of evaporation is made
under the assumption that repeated nucleation and bubble
growth is responsible for the evaporation.
flow to the drop through a contact area
time
t
TR2
The average heat
over a conduction
is:
Q
(5-123)
tR
=
1/2
Q
k
2(T -T
=
fpc
)rR2
(5-124)
The product of the average heat flux and the total evaporation time must equal the latent heat of the drop; the total
evaporation time
t
t(s)
is:
Pf V hfg
=
,
(5-125)
Q
or
1/2
t
12(.24)C
where
C3
(-)
.
pf
P
aa
T 2
kTs (T -T )2
(5-126)
This estimate is plotted in Figure
5-25 for a drop diameter of 220 im and a Weber number of 25
(C3 - 2).
If the evaporation time is longer than the time
-
182
-
between impacts there will be liquid buildup.
this should increase the value of
R
Initially
giving a larger wette d
area for heat transfer, while t he heat transfer effectivene ss
remains about the same.
As mor e liquid is added, however,
the effectiven ess is expected to drop and liquid to buildup continually on the surface which is quenched to saturati on
temperature.
This phenomenon is known as rewet.
This bri ef discussion is supported qualitatively by
Cumo [45] observed a sharp in-
the observatio ns of others.
creasing trend in liquid drop "stay time" with decreasing
wa 11 superheat in the wetting region (in contrast to a cons t ant impact p
iod
ments with heat transfer
igher wall superheat) .
In experi-
to a n impinging liqu id jet, Ruch
.1[ 52] observed con stant heat flux at constant target
tempe rat ure, independent of j et diameter and velocity, and
et al
the s i ze of the liquid-s urfac e contact area.
Mesler et al.
[53] in a recent paper, point s out that nucle ate boiling in
thin
fi lms differs from pool
boiling in that lower super-
heats are required in thin fi lms than in pool boiling for the
same heat tra nsfer rate.
Thi s also reflects on heat trans-
fer by nuclea tion of smal
drops, suggesting shorter total
evapo ration t imes than mi ht be' predicted in pool boiling.
The general conclusion is that the nucleati
the heat transfer mechani sm which accounts
process may be
r the complete
vaporization of impacting drops which wet a hot surface.
NN
-
183
-
Surface Wetting Transition Temperature
The tempe rature associated with transition from wetting
to non-wetting is noted in expe riments with flow boiling,
pool boiling, rewetting,
spray cooling, and drop impact.
Recently a study of the so call ed minimum film boiling
temperature was reported by Yao
Illinois).
et al. [54]
(ANL,
In this work, the authors suggest that the break-
down of the surface wetting con dition may be due to one of
two instabilities: thermodynami c instability or hydrodynamic instability.
The obser ved minimum film boiling
temperature will be the minimum of the two predicted by
thermodynamic and hydrodynamic instabilities.
The thermodynamic tempera ture limit, called the
homogeneous nucleation temperature,
represents the maximum
temperature to which a liquid can be superheated.
For a
first order phase transition in a fluid described by
Van der Waals'
equation of state, the pressure-volume
relation at constant temperature resembles the plot in
Figure 5-28 (See e.g.
[55]). The temperature volume relation
at constant pressure can be inferred, and is also shown in
Figure 5-28.
The homogeneous nucleation temperature is
loosely interpreted as the local maximum in the temperaturevolume curve.
This description reflects the nature of the
analysis of the thermodynamic instability, whereas the actual
approach is more complex.
There is also a heterogeneous
--
----
-F
"'
-v
"I ____
_
.-
-
184
-
SATURATION
Lu
T~
-
T
-~
SPCIICVOUM0
F
T5
~ 3
I
N
P
SATURATION
L-LT2
SPECIFIC VOLUME,. v
FIGURE 5-28
INSTABILITY IN PHASE TRANSITION
-
185
-
nucleation limit, mean ing that nucleation occurs at the
liquid-solid interface rather than in the liquid.
The hydrodynamic
instability limit, based on a vapor
removal rate from the sur face,
in an earlier paper.
is described by Henry [5 6]
Som e partial liquid-surface conta ct
was observed beyond the h ydrodynamic limit, and it was
suggested that this parti al contact accounted for the bul k
of the heat transferre d i n the process.
The temperature 1imits for wetting are discussed in
terms of the liquid.
Whe n the liquid and the solid are
brought together an inter mediate temperature is present
the interface.
a
For short times, this is the same as the
interface temperature for two semi-infinite bodies suddently
1
brought in contact. This interface temperature is given by
Equation (5-115).
Wetting may be expected if the interface
temperature T. is less than the minimum film boiling
temperature.
For water at 1 atmosphere, the hydrodynamic instability
limit predicts a temperature of about 200C, which is lower
than the homogeneous nucleation temperature of about 300C.
The suggested limiting interface superheat, T -Ts (C),
of about 100C is reasonably close to the transition temperature observed in this study,
as well as in many other inves-
tigations
1 For a diitscus-si-on of the surface - drop contact temperature
with surface oxide see Seki et al.[57].
-
6
186
-
LIQUID DROP CONTRIBUTION TO DISPERSED FLOW HEAT TRANSFER
The details of the statistical distribution of
drops of various sizes and velocities can be represented by
size and velocity distribution functions.
The liquid
contribution to total heat transfer in dispersed flow is
calculated by integrating the single drop heat transfer
effectiveness over the range of the drop distribution
functions.
The evaluation of the liquid heat transfer is
used for predicting local heat transfer and vapor generation
rates.
14,
-
187
-
Distribution Functions for the Dispersed Phase
In the formulation of the dispersed flow heat transfer
problem, the total heat transfer is broken down into liquid
and vapor contributions.
is
The liquid contribution
further broken down into a sum of contributions due to impacts of drops of various sizes and velocities.
density
n.
A number
is used to represent the number of discrete
drops 'Of a given drop size and velocity.
In order to
simplify the use of the heat transfer effectiveness in
estimating the liquid contribution to dispersed flow heat
transfer, the number density is replaced by a continuous
drop size and velocity distribution function.
The distri-
bution is assumed spatially uniform, and the drop size and
velocity distribution are considered independent (that is
drop velocity does not depend on drop size)
This
assump-
tion is consistent with Cumo's [ 8] detailed photographic
study of post dryout dispersed flows of Freon with drop
sizes on the order of
50 ypm
diameter.
The number of drops per unit volume of diameter in a
about a mean value
range
da
range
dUL about a mean value
(1 - a)
dn(a , U)
with a velocity in a
a
Ui is
a
U
d
=)
v a
ac
Uc
--
d U-
ac
U
6
(6-1)
-
where
188
-
the number of drops per unit vol ume
the vapor volume (void) fraction
the volume mean drop diameter ,
some characteristic in drop size
some characteristic in drop velo city
perpendicular to the tub e wall)
,
the size distribution function ,
and
the velocity distributi on functi on .
The drop size and vel oci ty distribution functions are
defi ned such that their integrals over the entire range
are unity:
Ja
amax
Umax
a
0o
(
) d()
Uc
=
) d
pu
.
(6-2)
0
The total number of drops per unit volume is the integral
of the distribution
d2n
(a
,
Us)
over the entire range
of diameters and vel ocities
Umax
Uc
n
= j
0
Ic
amax
a
d
(6-3)
0
Umax
Uc
a
amax
c
Tr
a
6
Pad(
)
u d
J0
(6-4)
ff",
-
=
(1
189
-
c)
-
(6-5)
3
ra
( 6
= a3
6
The volume of a drop of diameter a is V
so that
the volume mean drop diameter is defined as:
Tr
max
a 3
a
6v
_0c
a
3
The liquid volume fraction,
Umax
(1
-
a)
T
ac
(6-6)
)
is given by:
a3
(6-7)
d2n
0
o0
amax
ac
(1
a
- a),
ama x
a
Uc
=
(
a
S6
a)a
-
3
ra
Umax_
U
Tr a
66v
pa
-pu
Pu d( U0
(1
-
a ).
,a av
(1 - a)
(1 - a)
Tr
(
f
f
0
0
6
d(aa
a
6v
) (1)
(6-8)
(6-9)
(6-10)
-
190 -
This simply illustrates the consistency of the function
definitions.
The formula for drop number density
venient because
is con-
the density is scaled by the average num-
ber of drops per unit volume n, that is by the ratio of the
liquid volume fraction (1 - a) (liquid volume per unit volume) to the average volume of a drop (volume per drop).
The size and velocity dependence is scaled by distribution
functions pa and pu, of which the integrals over the entire
ranges are unity.
-
191
-
Incorporation of Drop Heat Transfer Effectiveness
The use of information on drop heat transfer effectiveness presented in this study is accompanied by some comments
on the applicability of measurements and modeling of a
phenomenon under one set of conditions to another set of
conditions.
Two important differences in conditions are
discussed.
The drop heat transfer measurements and modeling are
performed for normal impact on a hot surface.
The photo-
graphs of Wachters [33] for impact at an angle of
from
normal support the assumption that the normal component
of velocity characterizes the impact.
In dispersed flow
the impact angles are very shallow as drops move almost
parallel to the surface.
The dynamic effect of a significant
velocity component parallel to the impact surface has not
been investigated.
The vapor velocity field field in dispersed flow is
also significantly different from the modeled stagnant field.
Povarov et al.
[31] show
the possibility of significant
aerodynamic effects on drop motion for drops approaching
a surface with a high relative velocity.
Schoessow et al.
[44]'measured reduced evaporation times in the non-wetting
region for drops placed on a moving surface,
These effects
are not included in the model.
With these reservations, the drop heat transfer
effectiveness model for dry impacts is recommended for use
-
192
-
in dispersed flow heat transfer calculations at wall
temperatures above the minimum film boiling temp erature,
and an effectiveness of 1 is recommended below this
temperature.
The contribution of heat transfer due to impacting
drops to the total heat transfer in dispersed flow is given
by an integral over the range of drop diameters and velocities,
which replaces the sum in the original formulati on:
a.3
Q
Pf hf
A wall to
drops
g
.
6
a
U
max
max
ac fc0
=
Pf hfg
U
U
i
Tra
U
n.
£.
1
(1
-
at)
Pf hfg Uc fc
0
Uu
(6-12)
o
max
amax
=
d2
6b- J~
0
(6-11)
1
'3'a
f
c
0
d(y) d(U c
(6-13)
In the simpl ified drop heat transfer model, the
expression for dro p heat transfer effectiveness in the nonwetting region is given explicitely in terms of the
dimensionless grou ps which contain drop size and velocity,
in addition to flu id properties and wall superheat.
-
193
-
The Role of Drop Heat Transfer in Dispersed Flow Analysis
The analy 'sis of heat
transfer to impacting drops i
useful in the analysis of post dryout dispersed flows in
Firs t,
two ways.
the liqui d contribu tion is included in
the prediction of the total heat tran sfer; second,
amount of vapor generated at the wall
is included in the
prediction of the total vap or generat ion rate.
cases the drop contribution to total
negligible.
However,
it
is still
the vapor gener ation rate.
the
In many
heat transfer may b
imp ortant in predictin
The heat removal from a hot
tube by the vap or in a disp ersed flow is almost directly
proportional to the vapor velocity.
For a constant mass
flow rate, the vapor velocity depends directly on the
amount of vapor present, that is, on the length integral
of the vapor generation rate.
There are two contributi ons to the vapor generation
rate
vapor generated at the wall,
and vapor generated in
the core :
dW
-dz
dW
- -- I
dz wall
dW
+
(6-14)
-
dz
core
A number of investigations [e.g. 2, 10, 12] have analyzed
the vapor generation rate in the core.
rate at the wall is :
The vapor generation
-
dW
194
Q
a
TrB
-- 1-
dz
-
2
wall
hfg
SS
(6-15)
A
wall to
drop
There are a few cases in which the actual contribution
of heat transfer to the liquid drops is a significant part
of the total heat transfer.
One example is slow flow,
in
which the heat transfer from a hot tube wall to the slowmoving vapor is relatively low.
Another example is the pos-
sibility of rewet after burnout in tubes with nonuniform
heat flux.
Keeys et al.
[8] observed steady burnout and
rewet (and sometimes a second burnout) in a length of tube
with a cosine heat flux distribution (simulating reactor
heat generation distributions).
In this case, the heat
removal by the impacting liquid drops is fundamental to
predicting tube wall temperatures and the amount of liquid
build-up on the tube wall.
Any analysis which does not
include heat transfer from the wall to the drops cannot
predict the rewet phenomenon.
M
P1101WWW
1111w,
-
7
195
-
CONCLUDING REMARKS
Summary
The post dryout dispersed flow heat transfer problem
is considered in the context of flow boiling.
The heat
transfer is analyzed in terms of local conditions and
known details of the flow structure.
The total heat trans-
fer is constructed as a sum of vapor and liquid contributions.
The liquid contribution is further broken down into
contributions due to individual liquid drops in the dispersion.
The study focuses on the measurement and characterization of heat transfer to impacting drops.
Experimental
measurements under steady conditions show total evaporation
of impacting drops in the wetting region under dispersed
flow conditions.
The observed transition from wetting to
non-wetting is co isistent with transition temperatures
observed in other
studies.
Mea surements of heat transfer
to an air jet ent rained by a stream of drops suggest that
heat transfer in spray cooling experiments is due almost
entirely to cooli ng by entraine d air.
Analysis of heat transfer to impacting drops includes
modeling of drop deformation on impact.
A simple dynamic
model gives good estimates for drop shape as a function of
time durin
phenomenon
impact (as compared with photographs of this
The drop dynamics are relatively insensitive
-
196
-
to the assumed family of drop shapes during deformation.
Estimation of the heat transfer in non-wetting impacts is
of the same order of magnitude as published measurements.
A simple model of the overall process allows a good estimate of the heat transfer effectiveness without integrating
the equations of motion for the deforming drop to solve
for the details of the dynamics.
In the wetting region,
conduction, nucleation and bubble growth calculations
suggest the complete evaporation of the impacting drops,
as was observed experimentally.
The drop heat transfer effectiveness is easily
incorporated into dispersed flow heat transfer analysis.
The inclusion of heat transfer from the wall to the liquid
more accurately represents the local heat flux and vapor
generation rate, and allows for the possibility- of predicting rewet in tubes with nonuniform heat flux distributions.
.
IN
OMNI
I'mq NPINNOW
-
197
-
Conclusions
1.
Steady state measurements of heat transfer to
impacting drops eliminates uncertainties
associated with
interpretation of data from quench tests.
2.
The wall-to-drop heat transfer effectiveness in
the wetting region is approximately one for the conditions
and range of Weber numbers under consideration.
3. A drop stream in stagnant air entrains an air
jet.
The cooling of a hot surface by the entrained air
jet may be much larger than the cooling due to the impacting of the drops which entrained the air.
This can easily
account for the difference in heat transfer effectiveness
data reported in the literature.
4.
The surface temperature and surface properties
control the transition between wetting and non-wetting
impacts of liquid drops.
5.
A model for the deforming drop gives a good
estimate of time dependent drop dynamics during impact.
The model has two free parameters: a geometry parameter
which determines the drop shape, and a position parameter
which determines the drop location.
Different families
of assumed drop shape during deformation give similar
results.
6.
A heat transfer model combined with the drop
dynamics predicts heat transfer effectiveness of the same
-
198
-
order of magnitude as measurements in the non-wetting
region reported in the literature for two drop sizes.
7.
An estimate of heat transfer for drops which wet
the surface suggests complete evaporation of the drop.
8.
Tube-to-drop heat transfer can be estimated for
dispersed flow on the basis of the results of this study.
It
is useful in predicting local heat transfer and local
vapor generation.
-
199 -
Recommendations
At the conclusion of this study, several areas w'hich
will benefit from further study are identified briefly
The detailed nature of the liquid-surface intera ction
on wetting is not well understood.
microstructure is unknown.
The role of surfac e
The added complexities of heat
conduction and appearance of the vapor phase are furth er
unknowns.
The general effects of surface properties are
observed in wetting transition, but explanations are
incomplete.
Further experimental work can provide more drop heat
transfer data in the non-wetting region against which the
heat transfer analysis may be checked.
Evaporation times
for impacting-wetting drops can be measured.
Liquid
spreading on the wetted surface may be important.
More information is needed to determine the loca l
conditions from the flow history
in two phase flow bo il1i ng.
k1li.
-
200
-
REFERENCES
DOUGALL, R.S., ROHSENOW, W.M., "Film Boiling on the
Inside of Vertical Tubes with Upward Flow of the Fluid
at Low Qualities", MIT Heat Transfer Laboratory Report
No. 9079-26 (1963)
.M.,
"Film Boiling of
in a Vertical Tube", ASME
2
LAVERTY, W.F., ROHSENOW,
Saturated Nitrogen Flowi
Paper 65-WA/HT-26 (1965)
3
FORSLUND
Boi 1ing"
(1968)
4
HYNEK, S.J., ROHSENOW, W.M., BERGLES,. A.E., "Forced
Convection, Dispersed-Flow Boiling", MIT Hea t Transfer
Laboratory Report No. 70586-63 (1969)
5
PLUMMER, D.N., GRIFFITH, P., ROHSENOW, W.M. "Post
Critical Heat Transfer to Flowing Liqu id in a Vertical
Tube", Society Paper 76-CSME/CSChE-13 (1976 )
6
ILLOEJE, 0.C., ROHSENOW, W.M., GRIFFITH, P. "ThreeStep Model of Dispersed Flow Heat Transfer (Post
CHF Vertical Flow)", ASME Paper 75-WA/HT-1 (1975)
7
GANIC, E.N ., ROHSENOW, W.M., "Dispe rsed Flow Heat
Transfer", Internationa 1 Journal of Heat and Mass
Transfer, 20, p855-866 (1977)
8
CUMO, M., FERRARI,
Study of Two-Phase
Report RT/ING(71)8
9
CUMO, M., FARELLO, G.E. FERRARI, G., PALAZZI,
"On Two-Phase Highly Di persed Flows", Journal
Transfer, 96, p496-503 1974)
R.P., ROHSENOW, W.M., "Dispersed Flow Film
Journal of Heat transfer, 90, p399-407
FARELLO, G.E ., "A Photographic
ly Dispersed Flows", CNEN
1)
of Heat
10
BENNET, A.W., HEWITT, G.F., KEARSEY, H.A., KEEYS, R.K.F.
"Heat Transfer to Steam-Water Mixtures Flowing in
Uniformly Heated Tubes in Which the Critical Heat Flux
Has Been Exceeded", United Kingdom Atomic Energy
Authority Report AERE-R 5373 (1967)
11
JONES, O.C., ZUBER, N., "Post CHF Heat Transfer: A
ASME Paper 77-HT-79
Non-Equil ibri um Relaxation Model"
(1977)
-
201
-
12
SAHA, P., SHIRALKAR, B,S.
DIX, G.E., " A Post-Dryout
Heat Transfer Model Based on Actural Vapor Generation
Rate in Dispersed Droplet Regime", ASME Paper
77-HT-80 (1977)
13
JONES, 0.C., SAHA, P
Water Reactor Safety
H
y
li4
d
rau
c
Aspects
of
"Non-Equilibrium Aspects of
Symposium on the Thermal and
uclear
Reactor
Safet
Light Water Reactors, p2 4 9-288, ASME (1977
Volume 1:
BUTTERWORTH, D., "A Comparison of Some Void-Fraction
Relationships for CoCurrent Gas-Liquid Flow",
International Journal of Muliphase Flow, 1, p845-850
(1975)
GROENEVELD, D.C., GARDINER, S.R.M., "Post-CHF Heat
Transfer Under Forced Convective Conditions",
Symposium on the Thermal and Hydraulic Aspects of
Nuclear Reactor Safety, Volume 1: Light Water Reactors,
p43-73, ASME (1977)
16
BREVI, R., CUMO, M., "Quality Influence in Post-Burnout
Heat Transfer", International Journal of Heat and
Mass Transfer, 14, p483-489 (1971)
17
CUMO, M., URBANI, G., "Anomalies in Post-Dry Out
Heat Tran sfer wit h Steam Water Mixture s", Comitato
Nazional e Energia Nucleare Report TR/I NG(72)19 (1972)
18
KEEYS, R.F. K., RALPH, J.C., ROBERTS, D.N,,
"PostBurnout Hea t Transfer in High Pressu re Steam-Water
Mixtures in a Tube wi th Cosine Heat Flux Distribution",
Progress in Heat and Mass Transfer, 6, p99-118 (1971)
19
BAILEY, N.A., "The Inter action of Droplet Deposition
and Forced Convection in Post-Dryout Heat Transfer
at High Subcritical Pres surel", Atomic Energy
Establishment, Winfrith, Report AEEW - R 807 (1973)
20
CHEN, J.C. , SUNDARAM, R.K. , OZKAYNAK, F.T,, "A
Phenomenol ogical Correlati on for Post-CHF Heat Transfer"
Technical Report for the U .S. Nuclear Regulatory
Commission Contract #AT(49 -24)-0180, Department of
Mechanical Engineering and Mechanics, Lehigh University
(1977)
Nli
-
202
-
21
HALL, P.C., "The Cooling of Hot Surfaces by Water
Sprays" , Report RD/B/N3361, Central Electricity
Generat ing Board,Berkeley Nuclear Laboratories (1975)
22
ELIAS, E.,
YADIGAROGLU, G.,
"Rewetting and Liquid
Entrainment During Reflooding - State of the Art
'A
Topical Report EPRI NP-435 Research Project 248-1
University of California, Berkeley, Department of
Nuclear Engineering (1977)
23
COLLIER, J.G., Convective Boiling and Condensation
Chapter 1, McGraw Hill, (1972)
24
SOO, S.L., TREZEK, G,J,, DIMIC K, R. C., HOHNSTREITER.
G.F., "Con centration and Mass Flow Distributions in
a Gas-Soli d Suspension", Indus trial and Engineering
Chemistry Fundamentals, 3, p98 -106 (1964)
25
HUTCHINSON, P., HEWITT, G.F
DUKLER, A.E., "Deposition
of Liquid or Solid Dispersi s from Turbulent Gas
Streams: a Stochastic Model
Chemical Engineering
Science, 26, p419-439 (1971
26
KIRILLOW, P.L., SMOGALEV, I.P., " Analysis of HeatTransfer Crisis in Terms of a Drop Depositio'n Model"
translated from Teplofizika Vysokikh Temperatur, 11 ,
p794-804 (1973)
27
GILL, L.E., HEWITT, GF., LACEY, P.M.C,, "Sampling
Probe Stu dies of the Gas-Core in Annular Two-Phase
Flow - II Studies of the Effect of Phase Flow Rate s on
Phase and Velocity Distribution", :Chemical Engine ering
Science, 19, p665-682 (1964)
28
NAMIE, S., UEDA, T
"Droplet Transfer in Two- Phase
Annular Mist Flow" , Bulletin of the JSME, 15, p15681580 (1972)
29
SCHLICHTING, H., Boundary Layer Theory, Sixth Edition,
p568, McGraw-Hill (1968)
30
TATTERSON, D.F,, DALLMAN, J.C., HENRATTY, T.J.,
"Drop Sizes in Annular Gas-Liqui d FlowsAIChE Journal,
23, p68( 1977)
31
POVAROV, 0. et al., "Interaction of Drops with a
Boundary Layer on a Rotating Surfac e", Indzenerno
Fisicheskie Zhurnal,31, pl0 6 8-10 7 3 (1976) in Russian
-
203
32
LIU, B.Y.H., ILORI
T,A., "Aerosol Deposition in Turbulent Pipe Flow", Environmental Science and Technology
8, p351-356 (1974)
33
WACHTERS, L.H.J., WESTERLING, NA.J,, "The Heat
Transfer from a Hot Wall to Implinging Water Drops
in the Spheroidal State", Chemical Eng ineeri ng
Science, 21, p1047-1056 (1966)
34
WACHTERS L.H .J., SMULDERS, L, , VERMEULEN, JR,,
KLEIWEG, H.C.
,"The Heat Trans fer from a Hot Wall t
Impingin g Mis t Droplets in the Spheroidal Staten
Chemical Engi neering Science, 21, p1231-1238 (1966)
35
PEDERSEN, C.O., " An Experimental Study of the Dynamic
Behavior and Heat Transfer Characteristics of Water
Droplets Impinging upon a Heated Surface" International
Journal of Heat and Mass Transfer, 13, p369-381 (1970)
36
SCHNEIDER, JM., HENDRICKS, C.D., "Source of Uniform
Liquid Droplets", The Review of Scientific Instruments,
35, p1349-1350 (1964)
37
SCHNEIDER, J.M., LINDBLAD, N.R., HENDRICKS, C.D. "An
Apparatus to Study the Collision and Coalescence of
iquid Aerosols", Journal of Coll oid Science, 20,
p610-616 (1965)
38
LINDBLAD, N.R., SCHNEIDER, J.M., "Production of Uniform
Sized Liquid Droplets", Journal of Scientific Instruments, 42, p635-638 (1965)
39
MOREAUX, F., CHEVRIER, J .C., BECK, G., "Destabili zati on
of Film Boil ing by Means of a Thermal Resistance"
Internati ona 1 Journal of Multiphase Flow, 2, p183 -190
(1975)
40
WACHTERS, L.H.J,, BONNE, H., VAN NOUHUY S, H.J., "The
Heat Transfer from a Hot Horizontal Pla te to Sessile
Water Drops in the Spheroidal State", Chemical
Engineering Science, 21, p924-936 (1966 )
41
GOTTFRIED, BS,, BELL, K.J., "'Film Boiling of
Shperoidal Droplets", Industrial and Engineering Chemistry Fundamentals, 5, p561-568 (1966)
mill
-
204
-
LEE, C.J . BELL, K.J., "The
Leidenfrost Phenomenon: Film Boiling of Liquid
Droplets on a Flat Plate" , International Journal
of Heat and Mass Transfer 9, p1167-1187 (1966)
42
GOTTFRIED, B.S,,
43
BAUMEISTER, K.J., HAMILL, T.D., SCHWARTZ, F.L.,
SCHOESSOW, G.J., "Film Boi ling Heat Transfer to
Water Drops on a Flat Plat e1, Chemical Engineering
Progress Symposiu m Series No. 64, 62, p52-61 (1966)
44
SCHOESSOW, G.J., BAUMEISTER, K.J., "Vel ocity Effects
on Leidenfrost Bo iling of Various Liqui ds", Heat
Transfer 1970 V, B3.11 (1970) (Paper presented at
the Fourth Intern ational Heat Transfer Conference,
Paris-Versailles)
45
CUMO , M., FARELLO, G.E., "Heated Wall-Droplet
Inte raction for Two -Phase Flow Heat Transfer in Liquid
Def icient Region", European Atomic Energy Community Eura tom Eindhoven, Symposium on Two Phase Flow Dynamics
II, pl 325-1357 (196 7)
46
MCGINNIS, F.K. III, HOLMAN, J.P. "Individual Droplet
Heat-Tran sfer Rates for Splatteri ng on Hot Surfaces",
Internati onal Journal of Heat and Mass Transfer, 12,
p95-108 ( 1969)
47
SARMA, P.K., MOHAN, N.V.R.S. RAO, K.V.A., "An
Analysis of Heat Transfer to Impinging Water Droplets
Upon a Heated Surface Under Film Boiling Conditions",
Proceedings of the First Nat ional Heat and Mass
Transfer Conference, Madras, Paper HMT-37-71, pX-19 X-25 (1971)
48
HOLMAN, J.P., JENKINS , P,E., SULLIVAN, F.G.,
"Experiments on Indiv idual Droplet Heat Transfer
Rates", International Journal of Heat and Mass
Transfer, 15, p1489-1 495 (1972)
49
GOLDSTEIN, H., Classical Mechanics, p38
Addison-Wesley (1965)
50
CARSLAW, H., JAEGER, J., Conduction of Heat in Solids,
Second Edition, p87, Oxford Clarendon Press (1959)
-
205
-
51
MIKIC, B.B., ROHSENOW, W.M.,"Bubble Growth Rates
in Nonuniform Temperat ure Field', Progress in 1eat
and Mass Transfer, 2, p2 83 -2 9 3, Pergamon Press (1969)
52
RUCH, M.A. , HOLMAN, J.P. , "Boi li ng Heat Transfer to
a Freon-ll 3 Jet Impi ngi ng Upwa rd 0nto a Flat, Heated
Surface", Internatio nal Journa 1 of Heat and Mass
Transfer, 18, p51-60 (1975)
53
MESLER, R., MAILEN, G., "Nucleate Boiling in Thin
Liquid Films", AIChE Journal, 23, p954-957 (1977)
54
YAO, S., HENRY, R.E., "An Investigation of the Minimum
Film Boil ing Temperature on Horizontal Surfaces"
(accepted for publication in the Journal of Heat
Transfer - 1978)
55
CALLEN, H.B., Thermodynamics, p148, John Wiley and
Sons (1960)
56
YAO, S.C., HENRY, RE., "Hydrodynamic Instability
Indu ced Liquid-Solid Contacts in Film Boi 1ing"
ASME Paper 76-WA/HT - 25 (1976)
57
SEKI, M., KAWAMURA, H., SANOLAWA, K., "Transient
Temperature Profile of a Hot Wall Due to an Impinging
Liquid Droplet", Journal of Heat Transfer, 100,
p167-169 (1978)
W1
11411IN
-
206
-
A3 CIRCUITRY
Selective Drop Charging Electronics
Two circuits were used to prov ide a pulsed drop charging voltage.
The selection circuit counted the incoming
pulses (one pulse per drop) and outp ut one pulse for every
m pulses counted, where
m was any integer from 1 to 99.
The duration of the output pulse was variable, and was
adjusted to the time of one cycle.
The switching circuit
turned the charging voltage off for the duration of the
input pulse.
The circuit and signal diagrams are shown in
Figures A3-1 through A3-4.
WITHINPUT
5 (V) BAT
if)
,OUTPUT
INPUT
SIGNAL
SIGNAL
COMMON
GROUND
OUTPUT PULSE WIDTH,
=
(++2.4x103 )-(O.O1x10
1.66x10~5 s <
OR WITH
T =
T
<
7.10z10
6
f)-ln(2)
4
1/f
60,100 1/s
>
f >
1,410 1/s
FIGURE A3-1 PULSE SELECTION CIRCUIT SCHEMATIC
f =
4, 000 (1/s)
LU
LU
LU
CD
CD
TIME, t (ms)
FIRST INTERNAL SIGNAL
TIME, t (ms)
INPUT SIGNAL
C\j
LUJ
LUJ
LU
c-i
CD
C-
0
L
2
TIME, t (ms)
SECOND INTERNAL SIGNAL
6
0
2
4
TIME, t (ms)
OUTPUT SIGNAL
FIGURE A3-2 PULSE SELECTION CIRCUIT SIGNALS
6
INPUT:
LINE
VOLTAGE
30 (KQ)
WITHINPUT
15 (V)
BATTERY
OUTPUT:
PULSED
LINE
VOLTAGE
INPUT:
PULSE
SIGNAL
COMMON
GROUND
FIGURE A3-3 DROP CHARGE VOLTAGE SWITCHING CIRCUIT SCHEMATIC
-
210
LINE VOLTAGE
300
LtJ
Lu
PULSE
Q-
]
2
4
6
8
TIME, t (ms)
INPUT SIGNALS: LINE VOLTAGE AND PULSE
300
LtJ
LLJ
C.D.
u
6
0
1i
2
-
I.
4
6
8
. TIME, t (ms)
OUTPUT SIGNAL: DROP CHARGING VOLTAGE
FIGURE A3-4 DROP CHARGE VOLTAGE SWITCHING CIRCIUT SIGNALS
-
A4
211
-
DATA SUMMARY
A summary of the drop heat transfer data is given in
Table A4-1.
The comments can be interpreted as follows:
bubbling
hissing
liquid build-up
rebounding drops
-
212
TABLE A4-1
Target
DATA SUMMARY
s
s
s
s
s
s
s
s
45
45
45
45
45
45
45
45
86
86
86
86
86
86
86
86
3.35 ::3.35
3.35
3.35
3.35
3.35
3.35
3.35
3900
3900
3900
3900
3900
3900
3900
3900
20
30
20
30
20
30
258
258
258
258
258
258
258
258
Drop Impact
Velocity
U (m/s)
1.31
1.31
1.31
1.31
1.31
1.31
1.31
1.31
Weber
Number
WE
7.3
7.3
7.3
7.3
7.3
7.3
7.3
7.3
Target
Temperature
110
110
110
147
147
147
209
209
5.35
4.04
1.36
5.92
4.27
1.74
3.49
3.3E
1.06
1.06
1.1C
1.0C
-
.13
.15
b,Z
b,;
h
h
r
r
Material
s or c
Impact
Angle
6
Liquid
Temperature
Tf (C)
Liquid
Flow Rate
Wf(kg/s)x 105
Vibration
Frequency
(1/s)
f
Drop
Selection
-
-
m
Drop
Diameter
a (Nm)
T s_(C)
Target
Heat
E2
/
(J/s)
Effectiveness
E
Comments
-
-
213
-
DATA SUMMARY
Target
s
s
s
s
s
s
s
Impact
Angle
45
45
45
45
45
45
45
Liquid
Temperature
86
86
86
86
86
86
86
3.35
3.35
3.35
3.35
3.35
3.35
3.35
3900
3900
3900
3900
3900
3900
3900
Material
s or c
Tf
(C)
Liquid
Flow Rate
Wf(kg/s)x
105
Vibration
Frequency
(1/s)
f
Drop
Selection
-
-
20
20
20
-
-
m
Drop
Diameter
a
258
258
258
258
258
258
258
1.31
1.31
1.31
1.31
1.31
1.31
1.31
7.3
7.3
7.3
7.3
7.3
7.3
7.3
209
172
172
259
259
295
295
3.01
6.52
2.14
4.56
4.29
5.27
4.891
(um)
Drop Impact
Velocity
(m/s)
U
Weber
Number
WE
Temerature
Ts
Target
Heat
E
2
/9
(J/s)
Effectiveness
Comments
6
h
-
.07
r
-
.10
r
-
-
214
-
DATA SUMMARY
Target
s
s
s
s
s
s
s
45
45
45
45
45
45
45
86
86
86
86
86
86
86
3.6
F4ow Rate
Wf(kg/s)x 105
3.6,
3.6
3.6
3.6
3.6
3.6-
4000
4000
Material
s or c
Impact
Angle
0
Liquid
Temperature
Tf (C)
Liquid
Vibration
Frequency
f
4250 4250 4250
4250 4250
(1/s)
Drop
20
20
-
20
-20
256
256
256
256
256
262
262
1.95
1.95
1.95
1.95
1.95
1.81
1.81
16
16
16
16
16
14
14
127
127
127
374
374
110
110
Heat
E2 /<p (J/s)
6.24
6.24
1.45
7.99
7.61
4.67
4.67
Effectiveness
1.18
1.18
.84
.84
Selection
m
Drop
Diameter
a
(vim)
Drop Impact
Velocity
U
(m/s)
Weber
Number
WE
Target
Temperature
Ts
(C
Target
Comments
-
.09
r
-
-
215
DATA SUMMARY
.q
Target
Material
s or c
s
Impact
Angle
45
6
i
s
s
i -
1
i
i
Liquid
Temperature
- I-
.I
4
I
86
(C)
T
Liquid
Flow Rate
Wf(kg/s)x
3.6
3.6
3.6
3.6
3.6
3.6
3.6
3.6
4000
4000
4000
4000
4000
4000
4000
4000
20
30
20
30
262
262
262
262
262
1.81
1.81
1.81
1.81
1.81
14
14
14
14
14
110
110
110
110
4.67
3.70
1.27
.84
.90
105
Vibration
Frequency
f
45
45
45
45
45
45
(1/s)
Drop
Selection
-
30
-
262
262
1.81
1.81
14
14
14
110
110
147
147
5.33
3.80
1.53
4.96
2.29
.93
.84
-
m
Drop
Diameter
a (jjm)
Drop Impact
Velocity
U
262
1.81
(m/s)
Weber
Number
WE
Target
Temperature
Ts
(C)
Target
Heat
E 2 /p
(J/s)
Effectiveness
Comments
-
some steam
-
.98
_
-
-
216
-
DATA SUMMARY
Target
S
s
s
S
s
s
s
Impact
Angle
45
45
45
45
45
45
45
Liquid
Temperature
86
86
86
86
86
86
86
4.0
4.0
4.0
4.0
4.0
4.0
4.0
3650
3650
3650
3650
3650
3650
3650
20
30
-
20
30
30
280
280
280
280
280
280
280
1.7
1.7
1.7
1.7
1.7
1.7
1.7
13
13
13
13
13
13
13
4.75
3.52
1.23
6.21
4.75
4.75
.78
76
.98
.98
.98
h
h
h
Material
s or c
e
Tf (C)
Liquid
Flow Rate
Wf(kg/s)x
105
Vibration
Frequency
f
(1/s)
Drop
Sel ection
m
Drop
Diameter
a
(im)
Drop Impact
Velocity
U
(m/s)
Nuber
WE
Target
Heat
E2 /
-
1.79
(J/s)
Effectiveness
Comments
1
Zj
-
-
217
DATA SUMMARY
Target
Material
s
s
s
ss
45
45
45
45
45
45
45
86
86
86
86
86
86
4.0
4.0
4.0
4.0
4.0,
3650
4450
3350
4450
4450
-
20
20
30
s or c
Impact
Angle
e
_
_
_
Temperature
Tf
_-I-
86
(C)
Liquid
Flow Rate
---A
--
4.0
4.0
Wf(kg/s)x 10 5
Vibration
Frequency
3650 3650
(1/s)
f
Drop
Selection
m
Drop
Diameter
20
30
280
280
280
261
261
261
261
1.7
1.7'
1.7
1.7
1.7
1.7
1.7
13
13
13
12
12
12
12
134
134
134
134
134
134 J134
5.81
4.31
1.26
7.04
7.04
5.32
1.01
11.01
1.16
1.16
1.17
-
a (ym)
Drop Impact
Velocity
U
(m/s)
Webe r
Number
WE
Target
Temperature
Ts
(C)
Target
Heat
E
/
1.79
J/s)
Effectiveness
Comments
withisteam!
-
-
11
-
218
DATA SUMMARY
Target
Material
s
or
s
s
s
s
s
s
s
c
Liquid
86
86
86
86
8686
86
Temperatu
Tf
(C)
Impact
Angle
45
45
50
50
50
50
50
Liquid
3.8
3.8
3.8
3.8
3.8
4.0
4.0
Flow
Rate
105
Wf(kg/s)x
Vibration
4450
4450
4450
4450
4450
445
445
Frequency
fDrop
(1/s)
30
-20
30
20
15
Selection
m
Drop
258
258
258
258
258
261
261
Diameter
a
(lim)
_
Drop
Impact
1.7
1.7
1.7
1.7
1.7
1.7
1.7
Velocity
U
(m/s)
Weber
12
12
12
12
12
12
12
Number
WE
Target
122
122
110
110
110
134
134
Temperatu
Ts
(C)
Target
6.67
1.15
6.64
4.77
1.47
7.08
5.0
Heat
21
E
/$
(J/s)
Effectivene
.92
1.16
1.15
-1.26
1.1
I_
4eam
in
Comments
-
219
-
DATA SUMMARY
Target
Material
s
S
s
50
50
s
s or c
Impact
Angle
e
Liquid
Temperature
Tf
86
86
86
86
86
86
86
86
(C)
Liquid
-
3.8
Flow Rate
Wf(kg/s)x 105
Vibration
lo
Frequency
f (1/s)
-
-
3.8
-
-
-
-
3.8
3.8
-__
3.8
3.8
3.8
3.8
-
-
-
-
4450
4450
4450
4450
4450
-
20
30
-
20
30
-
30
258
258
258
258
258
258
258
258
1.7
1.7
1.7
1.7
1.7
1.7
1.7
1.7
12
12
12
12
12
12
12
12
122
134
134
134
147
147
147
16
1.68
7.47
5.84
1.93
7.26
5.68
1.96
1.29
1.37
1.23
1.30
h
h
4450
_____
4450
4450
Drop
Selection
m
Drop
Diameter
a (ym)
Drop Impact
Velocity
U (m/s)
Weber
Number
WE
Target
Temperature
Ts
(C)___
Target
Heat
E2
172
59
(j/s)
Effectiveness
Comments
-
-
1.23
h
dulin
-
.1
220
-
DATA SUMMARY
Target
Material
s
or
s
s
s
50
.50
50
50
50
86
86
86
86
86
s
s
s
s
s
50
50
50
86
86
86
c
Impact
Angle
Liquid
Temperature
Tf
(C)
Liquid
Flow Rate
A
__
3.8
3.8
3.8
3.8
4450
4450 4450 4450
3.8
3.8
3.8
4450
4450
4450 14450
30
30
3.8
Wf(kg/s)x 105
Vibration
Frequency
f
(1/s)
Drop
Selection
-
30
30
-
-
30
m
Drop
Diameter
a (yrm)
258
258
258
258
258
258
258
258
Drop Impact
Velocity
1.7
1.7
1.7
1.7
1.7
1.7
1.7
1.7
12
12
12
12
12
12
12
12
172
197
197
197
247
247
247
1367
2.46
3.40
3.40
2.98
4.32
4.32
4.07
6.52
.15
.15
.09
.09
h,r
h,r
r
r
U
(m/s)
Weber
Number
WE
Target
Temperature
Ts
(C)
Target
Heat
E/
(J/s)
Effectiveness
Comments-
-
-
-
.05
r
-
221
DATA SUMMARY
Target
Material
s or c
s
s
s
s
50
20
20
20
20
86
86
86
86
86
86
3.8
3.8
3.8
4.1
4.1
4.1
4.1
4450
4450
--
4450
4450
4450
4450
4450'
20
20
40
s
s
Impact
Angpe
50
50
Liquid
Temperature
Tf (C)
86
Ae
Flow
LiquidRate
Wf (kg/s)x
O
___--
105
Frequency
Vibration
f (1/s)
-
-__
-
-
L--I
Drop
Selection
-
30
-
258
258
258
264
264
264
264
1.7
1.7
1.7
.91
.91
.91
.91
12
12
12
3.6
3.6
3.6
3.6
367
295
295
122
122
122
122
6.38
5.21
5.04
6.85
6.85
4.32
2.09
1.03
1.03
.96
-
m
Drop
Diameter
a
(vm)
Drop Impact
Velocity
U
(m/s)
Weber
Number
WE
Target
Temperature
Ts
(C)
Target
Heat
E2/$
(J/s)
Effectiveness
Comments
3
-
.06
r
-
-
h
-
222
-
DATA SUMMARY
Target
Material
s
s
S
S
s
s
s
s
Impact
Angle
8
20
20
20
20
20
20
20
20
Liquid
Temperature
Tf (C)
86
86
86
86
86
86
86
86
Liquid
Flow Rate
4.1
4.1
4.1
4.1
4.1
4.1
4.1
4.1
s or c
Wf(kg/s)x
105
Vibration
Frequency
f
4450 4450 4450 4450
4450 4450
4450 4450
(/s)
Drop
20
40
-
40
-
40
-
20
264
264
264
264
264
264
264
264
.91
.91
.91
.91
.91
.91
.91
.91
Weber
Number
WE
3.6
3.6
3.6
3.6
3.6
3.6
3.6
3.6
Target
Temperature
147
147
147
172
172
197
197
247
2.09
5.47
2.57
3.30
2.97
3.94
Selection
m
Drop
Diameter
a (,pm)
Drop Impact
Velocity
U
(m/s)
TS
(C)___
Target
Heat
E2 / (Js)
Effectiveness
Comments
___
7.72
4.96
1.22
1.24
h
-
1.25
h
j
-
.14
r
-
.03
r
-
223
-
DATA SUMMARY
Target
s
s
s
s
s
s
s
Angle
20
20
20
20
20
45
45
Liquid
Temperature
86
86
86
86
86
26
26
4.1
4.1
4.1
4.1
4.1
3.8
4450
4450
4450 4450
4450
4800 4800
Material
s or c
Impact
e
Tf
(C)
Liquid
Flow Rate
3.8
W (kg/s)x 105
Frequency
f
(1/s)
Drop
Selection
-
10
-
10
-
20
30
m
Drop
Diameter
264
264
264
264
264
251
251
.91
.91
.91
.91
.91
1.8
1.8
Weber
Number
WE
3.6
3.6
3.6
3.6
3.6
13
13
Target
Temperature
247
295
295
367
367
122
a
(Wm)
Drop Impact
Velocity
U
(m/s)
122
Ts_(C)
Target
Heat
E 2 / (J/s)
Effectiveness
Comments
3.81 5.23 4.85 6.65 6.42
-
.04
r
-
.02
r
-
5.80 4.23
1.05
1.02
-
224
-
DATA SUMMARY
Target
s
s
s
s
s
s
s
s
45
45
45
45
45
45
45
45
26
26
26
26
26
26
26
26
3.8
3.8
3.8
3.8
3.4
3.4
3.4
3.4
4600
4600
4600
4600
4600
4600
4600
4600
40
40
50
-
20
30
40
-
Drop
Diameter
a (pm)
251
251
251
251
245
245
245
245
Drop Impact
Velocity
1.8
1.8
1.8
1.8
1.8
1.8
1.8
1.8
13
13
13
13
13
13
13
13
122
122
122
122
147
147
147
147
4.00
3.57
3.24
1.31
5.52
4.21
3.61
1.92
.94
.89
.88
Material
s or c
Impact
Angle
Temperature
Tf (C)
Liquid
Flow Rate
Wf(kg/s)x
105
Vibration
Frequency
f (/s)
Drop
Selection
mII
U (m/s)
Nuber
WE
Target
Temperature
T s_(C)
Target
Heat
EE2 /
s
(J/s)__
Effectiveness
Comments
__
1.25
_-
1.05
1.12
-
h
-
-
225
DATA SUMMARY
Target
Material
s
s
s
s
s
s
s
s
s or c
Impact
Angle
45
45
45
45
45
45
45
45
26
26
26
26
26
26
26
26
4.0
4.0
4.0
4.0
4.0
4.0
4.0
4.0
Vibration
Frequency
f (1/s)
4600
4600
4600
4600
4600
4600
4600
4600:
Drop
Selection
20
40
60
20
40
60
-
2.59
2.59
2.59
2.59
2.59
2.59
2.59
2.59
2.1
2.1
2.1
2.1
2.1
2.1
2.1
2.1
e
Liquid
Temperature
Tf
(C)
Liquid
Flow Rate
Wf(kg/s)x
105
-
m
Drop
Diameter
a
(im)
Drop Impact
Velocity
U
(m/s)
Weber
Number
WE
I
19
19
I
19
19
19
19
147
172
172
172
172
1.92
6.29
4.54
4.05
12.55
.83
.88
1.00
-
Terpertur
147
147 t147
Target
Heat
6.55
4.35
3.55
1.02 11.07
1.08
E2
/
19
19
(J/s)
Effectiveness
Et
Comments
-
1W.
-
226
-
DATA SUMMARY
Target
S
S
S
S
c
c
c
Impact
Angle
45
45
45
45
45
45
45
Liquid
Temperature
Tf (C)
26
26
26
26
86
86
86
2.9
2.9
2.9
2.9
4.1
4.1
4.1
3000
3000
3000
3000
5350
5350
5350
10
20
20
-
20
30
50
268
268
268
268
248
248
248
1.6
1.6
1.6
1.6
1.9
1.9
1.9
11
11
11
11
15
15
15
388
388
388
388
110
110
110
6.92
6.77
5.98
4.91
3.71
.95
1.08
1.15
b,t
bZ
Material
s or c
e
Liquid
Flow Rate
Wf(kg/s)x
105
Frequency
f
(/s)
Drop
Selection
m
Drop
Diameter
a
(ypm)
Drop Impact
Velocity
U
(m/s)
Weber
Number
WE
Target
Temperature
Ts
Target
Heat
E2 / (J/s)
Effectiveness
Comments
_
_
7.10
7.14
.05
.11
.05
r
r
r
-
b,I
-
227
DATA SUMMARY
Target
Material
c
c
45
45
45
86
86
86
86
4.1
4.1
4.1
4.1
5350 5350 5350
5350
5350
5350
20
30
30
50
248
248
248
248
248
248
248
1.9
1.9
1.9
1.9
1.9
1.9
1.9
15
15
15
15
15
15
110
122
122
122
122
122
c
c
c
c
Impact
Angle
6
45
45
45
45
Liquid
Temperature
86
86
86
4.1
4.1
4.1
s or c
Tf (C)
Liquid
Flow Rate
Wf(kg/s)x 105
Vibration
-
-
5350
Frequency
f (1/s)
Drop
-
Selection
-
-
m
Drop
Diameter
a (um)
Drop Impact
Velocity
U
(m/s)
I
Nuber
WE
Target
Temperature
Ts__(C)___
Target
Heat
E 2 /p
1.58
_
__
_
__
74
7.44
5.26
1.24
1.15
122
1.71
5.69
4.18
1.24
1.25
1.87
(J/s)
Effectiveness
Comments
__
15
-
-
-
-
228
-
DATA SUMMARY
Target
Material
c
c
c
c
c
c
c
c
Impact
Angle
30
30
70
70
70
70
70
70
Liquid
Temperature
Tf (C)
86
86
86
86
86
86
86
86
3.9
3.9
3.9
3.9
3.9
3.9
3.9
3.9
5350
5350
4250
4250
4250
4250
4250
3100
40
40
s or c
e
Liquid
Flow Rate
Wf(kg/s)x 105
Vibration
Frequency
f
(1/s)
Drop
Selection
40
-
40
-
40
-
m
Drop
Diameter
a
244
244
244
244
263.
263
293
1.8
1.8
3.4
3.4
3.4
3.0
3.0
2.8
13
13
46
46
46
39
-39
38
122
122
122
122
122
122
122
122
4.46
1.70
4.46
4.46
1.70
4.37
1.62
4.22
1.25
1..25
(pm)
Drop Impact
Velocity
U
244
(m/s)
Weber
Number
WE
Target
Temperature
Ts
(C)
Target
Heat
E2 /4 (J/s)
Effectiveness
Comments
1.25
-
-
1.25
-
1.17
-
229
-
DATA SUMMARY
Target
C
c
c
c
c
c
c
c
Impact
Angle
70
70
70
30
30
30
30
70
Liquid
Temperature
86
86
86
86
86
86
86
86
3.9
3.9
3.9
3.9
3.9
3.9
3.9
3.9
3100
3100
3100
3100
3100
1900
1900
1900
Material
s or c
Tf (C)
Liquid
Flow Rate
Wf(kg/s)x
10-5
Vibration7
Frequency
f
(1/s)
Drop
Selection
-
10
-
10
-
20
-
20
m
Drop
Diameter
a
293
293
293
293
293
345
345
345
2.8
2.8
2.8
1.5
1.5
1.4
1.4
2.7
38
38
38
11
11
11
11
122
295
295
295
295
295
295
295
5.80
6.09
5.44
5.56
5.34
5.87
(urm)
Drop Impact
Velocity
U
(m/s)
Weber
Number
WE
Temprature
_
41
TsC
arget
E 2 /4
1.64 6.27
(J/s)-
Effectiveness
-
.05
-
.07
-
.05
-
.06
E
Comments
r
r
r
-
230
DATA SUMMARY
Target
c
c
30
30
70
86
86
86
86
3.9
3.9
3.9
3.9
5600
5600
5600
C
c
c
c
c'C
Impact
Angle
8
70
70
70
30
30
Liquid
Temperature
86
86
86
86
3.9
3.9
3.9
3.9
1900
4250
4250
4250 4250
Material
s or c
Tf
(C)
Flow Rate
Wf(kg/s)x 105
Vibration
Frequency
f
(1/s)
Drop
m
_
Drop
Diameter
a
_
_
_
_
_
_
10
-
10
_
345
263
263
263
263
240
240
240
2.7
2.4
2.4
1.3
1.3
1.3
1.3
2.4
41
25
25
7.3
7.3
6.7
6.7
23
295
295
295
295
295
295
295
295
5.62
6.20
5.62
5.87
5.51
6.09
5.51
6.92
(yrm)
Drop Impact
Velocity
U
_
10
-
10
-
Selection
(m/s)
Nuber
WE
Target
Temperature
Ts
Target
Heat
E
2
/9
(J/s)
Effectiveness
Comments
-
.07
r
-
.04
r
-
.07
r
-
.11
r
-
231
DATA SUMMARY
Target
Material
s or c
C
Impact
Angle
70
Liquid
Temperature
86
Tf
(C)
Liquid
Flow Rate
Wf(kg/s)x 10
3
Vibration
Frequency
f (1/s)
5600
Drop
Selection
~
m
Drop
Diameter
a
Drop Impact
Velocity
U
241
(lim)
2.4
(m/s)
Weber
Number
WE
Target
Temperature
23
295
Ts
Target
Heat
E 2 /$
5.98
(J/s)
Effectiveness
Comments
-
-
1,fi,
-
232
-
DETAILS OF DROP DYNAMIC ANALYSIS
APPENDIX A5
Equations of Motion for Drop Models
The equations of motion for the drop deformation
models are derived for general expressions for the drop
kinetic energy, potential energy, center of mass position,
and bottom radius.
The general expressions for a drop of
volume V are:
2
KE
=
p V
2 Pf
L(
dtm )
dX1
+ K( a
t
2
)
(A5-1)
potential energy
PE
=
aa2 L(
(A5-2)
a
center of mass position
z
cm
=
y
+
a
M(
a
a
(A5-3)
)
drop bottom radius
R
=
a N(
1 )
a
(A5-4)
where a is the diameter of a spherical drop of volume V
(
a
= V), zcm is the position of the drop center of mass,
-
...
-m 1 -1 k - P-m
-
233
-
A1 is a geometric dimension of the drop (depending on the
assumed drop shape), and y is the position of the bottom of
the drop with respect to the impact surface.
The functions
K, L, M, and N depend on the assumed shape for the drop.
The system has two indepe ndent coordinates, X1 and zcm.
Equa-
tions of motion are deri ved for these two coordinates using
the general functions K, L, and M; the expression for the
external force acting on the drop bottom is derived in terms
of a general drop bottom radius
on the function
a
N.
R, and therefore depends
For the sake of brevity, the argument,
of the functions K, L
M, and
N is omitted.
The energy conservation principle for this system can
be stated as:
t2
[6(KE - PE)
+ F6y]dt
=
(A5-5)
0.
t1
Because of the amount of symbol s involved, the three terms
in the energy equation will be considered individually.
The integration of the ki netic energy term is detailed
as follows.
6(KE)
The differential isI:
0
=
f
V
F
L(
dzdtm
c
dt
)
2
+ K(
dA
d1
dt
2
12
j
(A5-6)
For constant density and drop volume, the differential is:
Note that
d
1
a
d 1K
a
=
K
-
234
d6z cm
dt
I PV [2( dz
p V
dt
S(KE)
The time integral
Pf V
(6KE)dt
t2
dz
dt
(A5-7)
-
Zcm
2( ZCm )zcmdt
dt
t
t2
+
2K
dt
is obtained by integration by parts:
t2
f.
dt
1
dt
a
6dX
) dcX
2
dX1
+K
1
+ 2K
dt
t2
Jt
d2
2K( d
1
2
2 K
a
)6A
tI
t2 - 1
t f -a
+
K'
dX
dt
1x dt
The virtual changes in the coordinates z
trary and are customarily set to zero at t
the integrated terms are zero.
dX1
dt
ijdt
(A5-8)
and X, are arbiand t
2
so that
The time integral of the
kinetic energy terms is written in terms of the virtual displacements 6zcm and 61 :
f2
t
(6KE) dt
122{
d2 z
cmdt2
V
-Pf
ft
+
-K(
2
at
) -
K
Sz cm
dX1
1 dt
(A5-9)
-
235
The potential energy term is simply:
St
2
t2
IL (P E)dt
6(-aa 2L)dt
t1
=
In the work term,
(A5-10)
aa
f
[(-L' )SX ]
(A5-ll)
FHy, the virtual change 5y must be ex-
pressed in terms of the two chosen coordinates,
J2
zcm
and
t
[(F)
(F6y)dt
z cm + (-F M') 5
1
(A5-12)
Idt
The energy equation for this system is:
I
PfV
~d 2 z
~
m)(6zcm
dt 2c
PfV
d2 xI
K( ..2
ti
+.aa[-L']6A1 + [F]Szcm
+ [-F M']6
dA
-K ( dt
j
dt
=
0.
(A5-13)
The virtual displatements
and 6X1
are inde pendent and
xI
I
-
236
integral
In order for this
arbitrary.
efficients of both 6z cm and 6X1 must
to vanish, the cozero.
The two re-
suiting equations of motion are:
d2 z
m ) + F
-pf V(
=
0
1
K'(-
dt
+
(A5-14)
dA1
dt
)
-
ca L'
FM'
= 0,
(A5-15)
d2z
F
=
pfV(
(A5-1 6)
dtm)
dt2
d2t
Pf V K
+
( dt
1
K'(
)
dX 1
dt
aaL
M'"
(A5-17)
-
237
-
Dynamic Scaling Functions for Two Drop Shapes
The general functions K, L, M, and N are derived for
two shapes, the right circular cylinder and the truncated
sphere.
For a right circular cyl inder of height X1 (m) and
radius X2 (m), the volume V(m3
V
) is gi ven by
Tr
2
=
For a constrant volume V, the radius
x2
(A5-18)
can be calculated
X1 is known:
if the height
2
a /6
)1/2
a3 \1 /2
(A5-19)
(
The flow field which describes a deforming right ci rcu 1ar cyl inder with center of mass motion in the axial directi on
s:
_
z z
-z
dz CM
dt
z
1
2
1
S
2
X
dX 1
dA 1
dt
(A5-20)
(A5-21
dt
The kinetic energy of this flow is
KE
=
-1-
(Uz
Pf
V
2
+ Ur 2 )dV
(A5-22)
- 238 z
1
cm +
[dt
2
dz
1
2-Pf
cm
Z -
+
A
l
d1'
r
I
1
x3
dz
dtJ
cm
2
2
Tr 2
dz
21T r dr
j
dt
dA 1
+22 2
2xl1
iA2
2
dt
2
)
T
A2
A1
4
dAt
dt
+
dz
1
dt
2
2
1 Pf
dA;
~2
(z cm
+
zcm
A
1 2
+ [
dt
dA1
dt
(A5-23)
The surface tension energy of the cylindrical drop
model
surface tension and the surface
is the product of th
area:
PE
o[27rA
=
2 2+
2
The center of mass
cylinder;
if
X 2 A1 ]1
located at the midpoint
is
(A5-24)
of the
y is the location of the bottom of the cylinder,
cm = y
(A5-25)
1
-
239
-
The radius of the bottom of the drop is just the radius of the cylinder:
R = X2 .
(A5-26)
These relationships define the functions K, L, M, and
N for
A
the cylinder.
in favor of
Equation A5-19 is used to eliminate
A1 and the constant volume V(or diameter
a):
K( a
a
1 +
-1
l (
+2~7T71
]
(A5-27)
1/2
L(
=
a
6
M a
N(
Aa
=
(i
_
+
S6
(A5-28)
(A5-29)
2- a
)
a
a
1
1/2
(A5-30)
-
For
240
-
a truncated sphere of height X1 (m) and radius of
V(m3 ) is given by:
curvature x2(m) , the volume
V
X1 ( 2
=
For a constant volume
)
3
=
V, the radius of curvature
be calculated if the height X1
S
3
(A5-31)
r a3/6
x2
can
is known:
1
+
2
(A5-32)
3
1
For the flow field for a deforming truncated sphere i
However, the general form of the
not easily described.
kinetic energy function for the cylinder suggests a similar
form for the truncated sphere.
The kinetic energy of the
cylinder can be written as
KE
KE
=
z
=1~d
V (
c
-
2
) +
2
FdX
+ C2
dX
2
2
dt
d
(A5-33)
where
C
=
and
C2
dX2
1
dX
A1
2
and for the cylinder,
2
1
6
a
x
I
3 1/2
1
2
2
1
(A5-34)
-
For the s phere,
A2
241
-
is the radius of curvature which is
larger than the maximum radial dimension of the drop when the
deformati on proceeds to the extent where
A
< X2. Let X3
be the maximum radial dimension of the truncated sphere,
measured from the symmetry axis.
The radial dimension
X3
is define d for two regions:
=
for
A
1/2 for
and
>
Al
(A5-35)
,
A2
(A5-36)
The kinetic energy for the sphere is assumed to be of the
form
KE
=
12 p
V
(
2cm)
+ CI+
dt
C2
dA
dX
)2]
dA
dt)
2
(A5-37)
The potential energy of the truncated sphere model is:
PE
=
a(41T A2 A1
-
Tr
xl 2)
(A5-38)
If the surface area of the drop bottom is omitted (for the
surface contacting drop) the potential energy is:
PE
=
a(2
A2Al
(A
5- 39 )
(A2-39)
-
242
The center of mass of a truncated sphere is found by
integration:
zcm
(z - y)dV
J
y
-
(A5-40)
The integration is performed with respect to the angle,
<e
for the range
<
0 -
2
(1
The position (z-y)
where the angle
T,
=
is expressed in terms of the angle 8:
and the differential
dV
80is defined:
x22Cos 2e
z - y = X 2 (cos
-
(A5-41 )
cose),
volume is:
7r(X 2 sine)3d6
=
(A5-42)
The center of mass location is:
J
r
X2 (sine)3(cos6
-
8
a0
zcm
y
cose)de
(A5-43)
iT X1
2
l
2
(A2
4
3 2 ~ Al
1
~
e
3)
(A5 -44)
-
243
-
The radius of the flat side of the truncated sphere is:
1/2
=
R
[x1 (2x 2
(A5-45)
A 1 )]
-
The functions K, L, M, and N can now be defined for
the truncated sphere, substituting expressions for A2 and
A3 in terms of A
and the constant diameter, a, of a spheri-
cal drop with the same volume,
V:
2
)
K(
32
I
= Ca + C2
A1 >
2
(A5-46)
(2
) = Cl + C2
K(
-
2(-1
1
3
a
3
j
)
a 3
2
+ 2
2
>X
1
(A5-47)
L( Aa ) =
L(
M(
)a
1 )
(
-) [2(
(
-)
1
a
-)
+ (- 1 ) 1, no contact (A5-48)
A1
( A1
3a
(
+
A
N( a
2
+ 2(a ) ], surface contact(A5-49)
a
) ]
(A5-50)
3
1/2
(A5-51)
-
244
Integration of Velocity Profile Function
A velocity profile function which meets the
specified boundary condi tion is:
=x3
p(x)
=
y
1
42
(A5-52)
The derivatives of p are:
p
=
3x 2
-
2x
3
(A5-53)
p
=
6x
-
6x
2
(A5-54)
p
=
6
-
12x
(A5-55)
-
12
(A5-56)
'''=
is defined as
The integral
I =4
[--
(p")
-
opf tp
dx
(A5-57)
and is evaluated by substitut ion of the derivatives
and integration:
Il
=
=
1 (6x
10
=
22 - 1
6x2)
41
2 - 2x3 )(6-12x)ldx
(A5-58)
(A5-59)
0.225
is defined as
The integral
I2
-
[- f
p''']dx
(A5-60)
- 245
and is evaluated for the selected function
I2 20
=
= 1.5
( ) (-12)dx
(A5-61 )
(A5-62)
IM11",
-
246
-
Nonlinear Temperature Profile
The steady state energy equation for the flow between
two parallel disks, of radius
tance y,
Pg c
R
and separated by a dis-
is:
+ Uz
Urr9r
29
9
kg
z
9z(
r
9r
(r
3r ) +
a2 )
(A5-63)
Radial variations are neglected for R >> y, and the velocity
profile has the assumed form:
Uz
=
Ur
=
-U 0 p' ( y L)
U0
2y
(AS-64)
(A5-65)
p
so that the energy equation becomes:
-p
c
U p( y )
9 p100
d2T
2
k kdz
dT
dz
(A5-66)
with the boundary conditions
T = Tw at
z = 0
(A5-67)
at
z = y
(A5-68)
T = Ts
One integration of the energy equation yields:
dT
=
C exp
U
yP
k
cP'9
p (
(A5-69)
and a second integration yields (with the application of the
-
247
boundary condition):
z/y
y p C
kg
U
T = T + y Cf
exp
p (x)
dx
(A5-70)
Application of the second boundary condition determines the
constant of integration
T
-
T
U
yp
k
exp
w)
C= s
C
'
p(x)
dx
(A5-71)
The gas velocity
U0
is given approximately
k S2 (T
2
p
-
T
)
hfs
(A5-72)
so that
U0 y pg C
k
where the superheat group
(A5-73)
CT
Cpg (T,
hf
The coefficients
and
is :
-
T-)
2 are defined as :
(A5-74)
I - -- -
-
dT
wy
dT
-dz
at z = 0
(A5-75)
at z = y
(A5-76)
-T
/T~
___
-
- T
T
dz
2
248
INII
I
)
y
/
y
These coefficients are evaluated by substitution of the
integ ration constant
C
into the temperature gradient ex-
press ion, so that
J
A5-7
1exp[S
2
I)
CT p(x)]dx
0
and
exp( 2 CT)
(A5-78)
exp[5 2 CT p(x)]dx
0
and S can be
2
evaluated as functions of the superheat group CT by selFor any function p(x), the coefficients a
ecting a number to represent the product (s )-(CT) evaluating
2
al and a2 from the relations shown, and finally ca1cul ati ng
CT knowing
For the function p(x) = 3x2
2*
-
2x3
1 and
a. are approximately correlated by the relations
-
(1
+ .8CT)
(1
+
2 CT)
(A5-79)
-
(1
for
82
+ 2 CT)
249
-
2
(A5-80)
0 < CT < 1.
These functions, together with the calculated values of
and
2 are shown in Figure A5-1.
Lu
l.2
+
1.o-
+
x(1
uJ
L8
+
0.8 CT)
CT)
0.8
0-
Liin
Li0.20,-
0
1
2
3
SUPERHEAT GROUP CT
FIGURE A5-1 EFFECT OF SUPERHEAT ON TEMPERATURE PROFILE COEFFICIENTS
-
251
Temperature Correction for Vapor Dens ity
be evaluated at a
Let the average vapor density
temperature
= ---
T
(A5-81 )
(T + T,)
The ideal gas law at constant pressure is:
P9
=s
Pg Is
T
2T
P
g's
(T
TR
If a temperature ratio
RR
RR
P
(A5-83)
)
- T
s
w
=
then the density ratio
+ T
is defined
T
TR
(A5-82)
(A5-84)
is computed:
9-
-
g 9s
(T T
-,,-T
w s
+
2T
s
)
(A5-85)
or
RR
=
(A5-86)
TR
2
+
1)
-
252
Property Data
Fluid properties used for all calculations are listed
in Table A5-2.
Metric units are used throughout the analysis.
However the property data are also given in British Units,
and conversion factors are listed in Table A5-1.
TABLE A5-1 CONVERSION FACTORS
Property
specific. heat
c
latent
heat h
thermal
conductivity,
viscosity
density
0
surface
tension a
British
Units
Conversion
.Factor
_
Metric
Units
(BTU/lbm-F)
x
(4183)
=
(J/kg-C)
(BTU/lbm)
x
(2324)
=
(J/kg)
(1.729)
=
(3/s-m-C)
(BTU/hr-ft-F)
(1bm/hr-ft)
x
(4.134x10~ ) =
(kg/s-m)
(lbm/ft 3)
x
(16.02)
=
(kg/m
(lbf/ft)
x
(14.62)
=
(kg/s
A.e,
"P.-
2
)
01940*
-
-
253
-
TABLE A5-2 PROPERTY DATA
Fluid:
H20
H20
N
0.312
0.0308
0.863
0.616
2
Saturation Point
00458
577
s cr
T /Tcr
Property (Units)
Cpf
(J/kg-C)
4180
5020
2050
c
(BTU/lbm-F)
1 .00
1 .20
0.491
c
(J/kg-C)
1880
5100
1:945
c
(BTU/lbm-F)
0.450
1.22
0.250
hfg
(J/kg)
2. 25x106
1 .51x10 6
1 .98x105
h fg
(BTU/lbm)
970
650
85
kf
(J/s-rm-C)
0.678
0.605
0.139
k
(BTU/hr-ft-F)
0.392
0.350
0.0805
k
(J/s-m-C)
0.0251
0.0622
0.00761
k
(BTU/hr-ft-F)
0.0145
0.0360
0.00440
g
(kg/s-m)
1 . 30x10-5
1 .98x10-
g
(lbm/hr-ft)
0.0314
0.0480
0.0131
Pf
(kg/rm 3 )
958
742
801
Pf
(lbm/ft
59.8
46.3
50.0
p
(kg/m
0.597
35.9
5.25
Pg
(ibm/ft 3)
0.0373
2.24
0.328
a
(kg/s2 )
.0585
.0181
.00848
a
(Ibf/ft)
4. 00 x1 0-3
1 .24x10-
3
3)
)
5
3
5 .42x10-6
5.
0x10
4
III
-
254
-
Maximum Pressure Rise and Reynol ds Number in the External
Flow
The maximum pres sure rise in the modeled flow between
at r = 0.
and separation
R
two parallel disks of radius
occurs
is known, the maximum
Fmax
If the maxi mum force
y
pressure rise is
2F
=-max
Tr R
Pmax
(A5-87)
The Reynol ds number which characterizes the flow between the two disks is:
= p9. Ur . g_
RE
where
Ur
Or
(A5-88)
is an average radial velocity.
is related to the axial velocity
U
The radial velocity
at the upper disk
(by continuity)
Urmax
=r
2y
(A5-89)
Uo
The maximum radial velocity occurs at
r = R.
The axial
velocity is determined by the evaporation rate:
- T )
g hfw y s
k (T
U
o=
2Pg
(A5-90)
-
255
The Reynolds number is now:
(Th
REg
2y 2
-
T )
(A5-91 )
g hf g
or in terms of the conductivity and viscosity groups,
TH
=
k (T
g w
and
-
hfg
RE
=
2
2 VIi
1
s
aa
1/2
(A5-92)
1/2
2
p
(p
9
T)
(A5-93)
aa
R
(A5-94)
;2y
The maximum Reynolds number occurs at the minimum separation
ymi
when the drop bottom radius
maximum
Rmax'
R
is less than its
-
256
-
Maximum Extension Radius, Cylindrical Model
The maximum size of a drop during impact can be
calculated on the basis of the assumption that all mechanical
energy is stored as surfa ce energy at the maximum extension:
PE max
+
KE0
=
(A5-95)
PE
For a spherical drop, the surface energy (in dimensionless
variables) is:
=
PE
r
3
(A5-96 )
/16
For the cylindrical drop, the general expression for surface
energy is:
PE
=
(27rX2
2
+
2irX2 x )
Tr
(A5-97)
/16
The constant volume requirement is used to eliminate the
cylinder height X1 in favor of the cylinder radius, X2
X
(A5-98)
1/(6X 2 )
=
The drop bottom radius
R
is the same as the radius
X2
for the cylindrical model:
R
(A5-99)
2
=
The initial value of kinetic energy,
KE0 , can be replaced
by an equivalent expression involving the impact Weber
number:
KE0
=
(Tr3 WE)/(12-16)
(A5-100)
With the substitution of these relations into Equation
(A5-9 ), the equation for maximum radial extension for the
cylindrical drop model is:
-
2 (2TrR
16
257
2
+
Tr
2R
-
3
WE
6_
16-
(A5-101 )
12
16
or,
WE
+
2
-24
The solution,
fo r WE > 1.74,
)
+
1
0
=
6-
(A5-102)
is
(3)1/2
2(
2
R
=(
(1
+
WE
+ 12 )
acos
1 +
WE )3/2
12/
(A5-103)