Convergence of the Robbins-Monro Algorithm in Infinite-Dimensional Hilbert Spaces
advertisement

Convergence of the Robbins-Monro Algorithm in Infinite-Dimensional Hilbert Spaces
D.M. Watkins (email: daniel.m.watkins@drexel.edu), G. Simpson (email: simpson@math.drexel.edu)
Department of Mathematics, Drexel University, Philadelphia, PA, USA
Supported by DOE grant DE-SC0012733.
I NTRODUCTION
R OBBINS -M ONRO F ORMULATION (C ONTINUED )
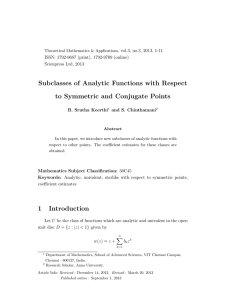
Probability measures on infinite-dimensional Hilbert spaces arises
in applications such as the Bayesian approach to inverse problems
[4]. Obtaining information from such measures is frequently computationally expensive; to ameliorate matters, we wish to find a Gaussian
proposal distribution for MCMC which is as close as possible to the
target distribution, with respect to the KL divergence (image reprinted
from [2]).
Preconditioning by C we obtain f (m) = CJ 0 (m), which will vanish
whenever J 0 vanishes. Finally, with vn ∼ ν0 , we can let
0.12
(3)
0
Yn = CΦ (vn + mn ) + (mn − m0 )
P∞
so that EYn = f (mn ). Let an ≥ 0 be such that
n=1 an = ∞,
P
∞
2
a
n=1 n < ∞. We then define a Robbins-Monro process to find the
zero:
mn+1 = mn − an Yn
(4)
The starting point is arbitrary; we choose to start at m0 .
µε
ν
µ0
0.10
P ROOF OF T HEOREM 1 (C ONTINUED )
µε Samples
ν0
≤ K1 E kvn k < K2 < ∞
If λ is the smallest eigenvalue of C, then λkuk ≤ kuk1 . Using this and
the Cauchy-Schwarz inequality, we find
√
2
2
2
k Bsn k + ksn k1 ≤ K3 kmn − m0 k1 + K4
≤ K3 Xn − K3 log Zµ + K4
P [X ∈ ∆x]
T HEOREM 1
0.06
βn = a2n K3 /2
If Φ : X → R is defined by
0.04
−0.2
0.0
x
0.2
0.4
Let H be a real separable Hilbert space and µ a measure on H, specified with respect to a Gaussian measure µ0 ∼ N (m0 , C):
dµ
1
=
exp (−Φ(u)) .
dµ0
Zµ
(1)
Φ : X → R is continuous on some Banach space X of full measure
with respect to µ0 , exp (−Φ(u)) is integrable with respect to µ0 .
Goal: Find a measure ν ∼ N (m, C) such that the KL divergence
DKL (ν||µ) is minimized.
Since ν and µ0 have the same covariance operators, the requirement
that ν ∼ µ0 will hold if m − m0 is in the Cameron-Martin space H 1 . H 1
has inner product hf, gi1 = hC −1/2 f, C −1/2 gi, where h·, ·i is the inner
product of H and norms k · k and k · k1 , respectively.
The measure ν is parameterized by m. Denoting ν0 = N (0, C), v ∼ ν0 ,
with some work [2] it can be shown that
1
2
DKL (ν||µ) = E [Φ(v + m)] + km − m0 k1 + log Zµ
2
(2)
We set J(m) = DKL (ν(m)||µ). We seek to minimize J, so we should
have that the variational derivative J 0 vanishes at the minimizer. In this
case, J 0 (m) = E ν0 [Φ0 (v + m)] + C −1 (m − m0 ).
ζn = an k(CB + I)mn −
(5)
where B is a self-adjoint, positive, bounded operator, then the RobbinsMonro process (4) converges to a minimizer.
lim k(CB + I)mnk −
k→∞
Let (Ω, F, P ) be a probability space and F1 ⊆ F2 ⊆ · · · be a sequence
of sub σ-fields of F . Let βn , ξn and ζ, n P
= 1, 2, . . . be nonnegative Fn
∞
measurable random variables such that n=1 βn < ∞ and
P
∞
n=1 ξn < ∞. If
(6)
E(Xn+1 |Fn ) ≤ (1 + βn )Xn + ξn − ζn
P∞
n=1 ζn
− an {hC
2
m0 k1
=0
so in particular mnk → (CB + I)−1 m0 = m. Since Xn → X a.s., we
have that mn → m almost surely. Since
ν0
f (m) = E (CB(v + m)) + m − m0 = 0
(8)
m is a critical point, and since J = (CB + I) is positive definite at m,
m is indeed a minimizer.
00
<
P ROOF OF T HEOREM 1
√
Define Xn = J(mn ). With Φ(u) = 21 k Buk2 , we have that Yn = (CB +
I)mn − m0 + CBvn . Expanding,
√
Xn+1 = Xn + a2n {k BYn k2 + kYn k21 }/2
(7)
−1
2
m0 k1
By
Theorem
2,
X
converges
a.s.
to
a
random
variable
X,
and
n
P∞
n=1 ζn < ∞. By choice of the sequence {an }, this implies that there
is a subsequence such that
T HEOREM 2 (R OBBINS -S IEGMUND )
then Xn converges almost surely to a random variable, and
∞. See [3], [1].
R OBBINS -M ONRO F ORMULATION
ν0
ξn = a2n (K2 − K3 log Zµ )
√
1
2
Φ(u) = Bu
2
0.02
−0.4
2
We then gather together these terms and set
0.08
0.00
The operators C and B are bounded, and C is trace-class, so
√
√
√
E ν0 {k Btn k2 + ktn k21 } = E ν0 {k BCBvn k2 + k CBvn k2 }
Yn , mn − m0 i + hBYn , mn i}
Let Fn = σ(X0 , X1 , . . . , Xn ). We write sn = (CB + I)mn − m0 and tn =
CBvn for convenience, so that Yn = sn + tn . Then taking conditional
expectation,
√
E(Xn+1 |Fn ) = Xn + a2n {k Bsn k2 + ksn k21 }/2
√
2 ν0
2
2
2
+ an E {k Btn k + ktn k1 }/2 − an ksn k1
R EFERENCES
References
[1] D. Anbar. An application of a theorem of Robbins and Siegmund.
The Annals of Statistics, 4(5):1018–1021, 1976.
[2] F.J. Pinski, G. Simpson, A.M. Stuart, and H. Weber. Algorithms for
Kullback-Leibler approximation of probability measures in infinite
dimensions. arXiv:http://arxiv.org/abs/1408.1920, 2014.
[3] H. Robbins and D. Siegmund. A convergence theorem for nonnegative almost supermartingales and some applications. Optimizing
Methods in Statistics, pages 233–257, 1971.
[4] A.M. Stuart. Inverse problems: A Bayesian perspective. Acta Numerica, 19:451–559, 2010.