Signal Recovery Using Cepstral Smoothing in the
advertisement

Signal Recovery Using Cepstral Smoothing in the
Shallow Water Environment
by
Jean Ok Nam
Submitted to the Department of Electrical Engineering and
Computer Science
in partial fulfillment of the requirements for the degrees of
Bachelor of Science in Electrical Science and Engineering
and
Master in Engineering in Electrical Engineering and Computer
Science
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
September 1994
©Massachusetts
Institute of Technology 1994. All rights rred.
MWiTHi:.
MASSACHiSE~
fINSTTlUE
I
sa0asiea*raolsrrwaU,
Author..................
Department of Electrical Engineering and Computer Science
September 2, 1994
Certifiedby.....
_T h
J. Robert Fricke
Assistant Professor
Thesis Supervisor
Acceptedby....
F.R. Morgenthaler
Chairman, Departmental Com ittee on Undergraduate Thesis
Signal Recovery Using Cepstral Smoothing in the Shallow
Water Environment
by
Jean Ok Nam
Submitted to the Department of Electrical Engineering and Computer Science
on September 2, 1994, in partial fulfillment of the
requirements for the degrees of
Bachelor of Science in Electrical Science and Engineering
and
Master in Engineering in Electrical Engineering and Computer Science
Abstract
The shallow water channel is complicated by multipath effects because of the proximity of the surface and bottom. The goal of this project is to extract the shape of the
original signal from the received signal which is corrupted by the multipath effects.
Given the impulse response of the channel and the received signal, an inverse filtering
method utilizing the minimum-phase components can be very effective. However,
because of the dynamic nature of the channel due to turbulence, internal waves, and
thermal stratification calculation of the exact impulse response is not realistic.
A more robust signal recovery method is necessary. In fact it is possible to separate
the signal from the channel impulse response in the cepstral domain. A process known
as cepstral smoothing can effectively do just this. And in this case, it makes the
recovery technique independent of the transfer function and robust to noise. This
minimum-phase method recovers the shape of the original signal, but all timing is
lost. It can be recovered by a moving root-mean-square window over the received
signal.
Thesis Supervisor: J. Robert Fricke
Title: Assistant Professor
Acknowledgments
There are many people to thank.
First and foremost I think Professor Robert Fricke and Draper Laboratories for
having the blind faith last fall to take me in as a Masters student. Rob, you have my
sincerest gratitude.
Thanks to my family, friends, and hockey mates. Without your love, support,
and fun distractions I would have never made it. A special thanks to Jeremy for all
the computer help that anyone could ever want and more. And to Deb, Matt, and
Smitty: thanks for keeping me happy and sane.
Contents
1
Introduction
7
1.1
Procedures
. . . . . . . . . . . . . . . .
1.2
Simulations
.
. . . . . . . . . . . . .
................................
.
7
8
2 Inverse Filtering
10
3 Minimum Phase
12
4 Cepstral Processing
15
4.1
Cepstrum
.................................
15
4.2
Separation of [r] and h[T] ........................
18
4.3
Cepstral
Smoothing
. . . . . . . . . . . . . . . .
.
5 Adding Noise
.........
19
23
5.1
Signal-to-Noise Ratio ........................
23
5.2
Matched Filtering ..........................
25
6 Timing Recovery
29
7 Two Targets
34
8
39
Conclusions
A Choosing Cepstrum Cut-off for Cepstral Smoothing
42
A.1 Impulse Response .............................
42
A.2 Signal ...................................
45
4
List of Figures
1-1 Shallow water channel ..........................
9
2-1 Sonar Signal, Channel Response, and Received Signal .........
11
3-1 Minmum-Phase Decomposition. .....................
..
13
4-1 Subtraction Method and Calculation of Xmin(t) from min[T]......
16
4-2
17
[-r] and
ax,min[T]
are equivalent.
....................
4-3 Plots of 9(r) - h(r), for exact and inexact impulse responses.
4-4 Recovered signals from exact and inexace impulse responses
....
19
.....
20
4-5 Separation of signal and impulse response in cepstral domain .....
21
4-6 Slowly and quickly varying frequency responses
21
............
4-7 Hanning windowing of cepstrum signal ..................
22
4-8 Signal recovery using cepstral smoothing .................
22
5-1 Calculation of Signal-to-noise ratio
23
..................
5-2 Effect of different levels of noise on the frequency response of the received signal .............................
25
5-3 Effect of different noise levels in cepstral domain ............
26
5-4 Improvement in sigal recovery after matched filtering .........
27
5-5 Cepstum of pure noise ..........................
28
6-1 Shallow water channel
...........................
29
6-2 Determination of tobject ..........................
30
6-3 Root-mean-square windowing ......................
31
5
6-4 Maximum noise level for timing recovery, no matched filtering ....
32
6-5
33
Maximum noise level for timing recovery, with matched filtering . . .
7-1 Two targets .................................
35
7-2
Cepstral smoothing window for multi-target signal ...........
36
7-3
Recovery of multi-target signal ......................
37
8-1 Shallow water channel
...........................
A-1 First and second signal paths. ......................
39
43
A-2 Cepstrum of impulse response of channel with Dt=15m, Ds=5m, D=35m,
L=210m ..................................
44
A-3 Cepstrum of impulse response of channel with Dt=3m, Ds=3m, D=35m,
L=210m ..................................
44
A-4 Cepstrums of signals of varying pulse length ..............
45
A-5 Recovered signals using different values of T- ..............
46
6
Chapter 1
Introduction
Shallow water channels are characterized by multipath effects because of the proximity
of the surface and bottom. Furthermore, the highly variable propagation conditions
make the shallow water environment very difficult to use as a communication channel.
The ideal goal of this research is to extract the shape of a sonar signal from the received
signal, which is corrupted by reverberant and ambient noise. However, here we will
only recover a signal of the same frequency content as the original signal and of a
comparable pulse length. Also we would like to recover the arrival time of the first
return. This will give us information about the distance to objects in the channel.
The motivation for this research originates with the end of the Cold War. It is
unlikely that in the near future there will be another major war or battle in the
middle of the deep ocean. However, it is more probable that there will be smaller
skirmishes fought off the shores of third world countries. The Persian Gulf War is a
prime example. Because of the new face of naval warfare, the Navy is very interested
in the shallow water environment. (The depth of shallow water is on the order of 50
meters.)
1.1
Procedures
Since we are trying to recover a signal after it has passed through a linear timeinvariant system, an obvious method is inverse filtering (Chapter 2). That is, to
7
pass the received through a system which undoes the effects of the channel. This,
however, proves ineffective because of the possible non-invertibility of the channel
impulse response and the inability to measure the exact impulse response.
To solve the first problem, we do all processing on only the minimum-phase components of the signals (Chapter 3). This is a valid approach as long as the sonar signal
we are using is a minimum-phase signal. Therefore we are only losing nonminimumphase characteristics of the channel in which we have no interest.
Solving the problem of not having an exact impulse response is more complicated.
The inverse filtering method is sensitive to inexactness, and any approximation seriously affects the results. Taking a hint from research in room acoustics, we looked
into cepstral analysis (Chapter 4). In the cepstral domain the signal can be separated
from the channel response. A process called cepstral smoothing further improves the
system to make it completely independent of the channel response.
So far only reverberant noise has been considered. We need to also examine the
effects of ambient noise on the recovery system (Chapter 5).
After minimum-phase processing, the time delay which tells us the distance to any
detected objects is lost. Recovery of this timing is facilitated by looking at a moving
root-mean-square window of the received signal (Chapter 6).
Finally, since the reverberant trains are longer than the original signal, it is possible that there two or more signals are so close in time that the received signals
overlap. Using minimum-phase processing and cepstral smoothing we can still recover
the signals. The case of two targets is explored (Chapter 7).
1.2
Simulations
All signals are simulated using the software package Matlab, version 4.1, copyrighted
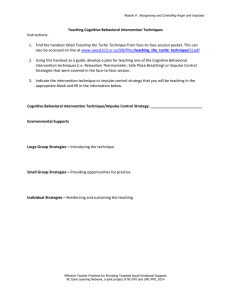
to The MathWorks, Inc. The channel is characterized with the following parameters
(See Figure 1-1):
D = Channel Depth = 35 m
Ds = Depth of Source and Receiver ranges from 3 to 32 m
8
Dt = Depth of Target ranges from 3 to 32 m
L = Range to Target from Source = 210m
Sea Surface
it
1
JL
Target
Sea Bottom
Figure 1-1: Shallow water channel.
The signal used is a 10 kHz gated sine wave of pulse length 3.3 x 10- 4 s with
a 3 kHz bandwidth.
While these simulations presented in this thesis are done for
fixed values of channel depth and object range, the phenomenologies and techniques
for minimum-phase processing and cepstral smoothing are applicable to other shallow
water environments.
9
Chapter 2
Inverse Filtering
The object here is to recover the originally sent signal, x(t), from the received signal,
y(t), and the impulse response of the shallow water channel, h(t). See Figures 1-1
and 2-1. The relationship between these signals is the following:
y(t) = x(t) * h(t).
(2.1)
If the water channel is considered a linear time invariant system, then the relationship
can be represented in the frequency domain as follows:
Y(w) = X(w)H(w).
(2.2)
Therefore, given the received signal and the impulse response, we can recover the original signal by filtering Y(w) with the inverse of the impulse response of the channel,
H-l(w), provided the inverse exists;
X(w) = Y(w)H- 1 (w).
(2.3)
We can go back and forth between the frequency and time domains using the
following transform pair [8]:
x(t) = J
X(w)etdw,
-00o
10
(2.4)
x(t)
,,
h(t)
A
U.1
2
0.05
01
i
0
.2
-0.05
-4
_n
.
-5
0
5
10
(a) Seconds
I0.26
15
x 10 - 4
I
0.28
0.3
(b) Seconds
0.32
y(t)
0.4
0.2
0
-0.2
_n A
0.278
0.28
0.282
0.284
0.286
0.288
0.29
0.292
0.294
(c) Seconds
Figure 2-1: (a) Sonar Signal, x(t), (b) Channel Response, h(t), (c) Received Signal,
y(t).
X(w) =
-00
x(t)e-itwdt.
(2.5)
This is an effective recovery process if the exact transfer function of the channel
is known and the inverse exists. That is, there are no zeros in the transfer function,
H(f).
In practice we will only have an estimate of the transfer function. Because of
the dynamic situation due to water waves and varying bottom conditions we cannot
calculate an exact transfer function.
this inexactness.
We need to make signal recovery robust to
One method for improving the process is to use minimum-phase
processing [13] and cepstral smoothing [3]. The minimum-phase processinginsures
that the inverse transfer function exists, and cepstral smoothing makes the process
independent of the impulse response of the channel.
11
Chapter 3
Minimum Phase
The transfer function of the channel may be contaminated with nonminimum-phase
zeros. These zeros will make the inverse, H-l(w),
unstable.
We can avoid this by
using minimum-phase processing.
To exploit the properties of minimum-phase processing,it is important that the
original signal is minimum-phase itself. If the received signal contains any nonminimumphase zeros, the same zeros will be present in the transfer function. Therefore, if the
exact transfer function is known, the minimum-phase zeros will cancel in the inverse
filtering step. However, we cannot exactly measure or compute the impulse response,
and approximations of the transfer function will not exactly cancel the nonminimumphase zeros [10]. The result is unstable poles in the inverse transfer function causing
it to be neither causal nor stable. By using only the minimum-phase component of
the transfer function, the inverse will always be stable and causal.
Consider only the minimum-phase components of the received signal and the channel response. Each signal can be decomposed into minimum-phase and all-pass components. The decomposition is the following [5]:
S(w) = Smin(w)Sap(W).
(3.1)
The minimum-phase component contains only poles and zeros above the real frequency axis in the complex plane, and the all-pass component has unit magnitude
12
jis
I
x
X 0X
X
Transfer Function
co
0
II
I
o
0x
x
X 0 X
X OX
>
|
X
x
X
x
X
>
>
0o
Minimum-Phase
All-Pass
o
Figure 3-1: Minmum-Phase Decomposition.
for all frequencies but has a phase which changes by -27r for each pole-zero pair. See
Figure 3-1.
Since the minimum-phase component has all zeros and poles above the real frequency axis, it is both causal and stable. Furthermore, the inverse, Smin(),
exists
and is also stable and causal. To recover the minimum-phase component of the original signal we need only multiply the minimum-phase component of the received signal
by the inverse of the minimum-phase component of the transfer function [11],
Xmin(w) = Hmn()Ymin ()-
(3.2)
By using this minimum-phase processing we have lost all linear phase information
of the channel to the all-pass component. Therefore, we have lost the timing of the
13
first return which is the information we need to determine the distance to the target.
Recovery of this timing is discussed in Chapter 6.
14
Chapter 4
Cepstral Processing
4.1
Cepstrum
The complex cepstrum [5] is defined as the inverse Fourier transform of the complex
logarithm of the Fourier transform of a signal,
:[T]= F-l{log(X(w))}.
(4.1)
The advantage of working in this complex cepstral domain is that convolution in
the time domain maps to addition in the cepstral domain. We already know that
convolution in time maps into multiplication in the frequency domain:
y(t) = x(t) * h(t),
(4.2)
Y(f) = X(f)H(f).
(4.3)
When the logarithm is taken,
log(Y(f)) = log(X(f)H(f))
= log(X(f)) + log(H(f)).
15
Taking the inverse Fourier transform,
(4.4)
Y)T]= x[T] + h[T],
since the transform is a linear operation.
To find the cepstrum of the minimum-phase component of the original signal, we
calculate the cepstrums of the minimum-phase components of the received signal and
transfer function and subtract the latter from the former. We will refer to this as the
subtraction method of signal recovery [9]:
Xmin[T7]=
To find
min[7] - hmin[T].
(4.5)
min(t) from the cepstrum, we take the transform, put it in the exponent
of e (this is the inverse log operation), and then take the inverse transform. This is
illustrated in Figure 4-1.
Q
Ymin[T]
min[T]
t
hmin [T]
Xmin[T]
| exp '
F
(.)
|
I_
,min (t)
Figure 4-1: Subtraction Method and Calculation of Xmin(t) from Xmin[T].
Since we are dealing with minimum-phase signals, we can conveniently avoid the
complications of the complex logarithm. To explain this we need to utilize two properties of minimum-phase functions.
1. Minimum-phase signals are causal; x(t) = 0 for t less than zero.
2. As shown in Figure 4-2, the magnitude of the Fourier transform of the minimum16
phase component is equal to the magnitude of the Fourier transform of the total
signal.
It is simpler to calculate the real cepstrum, which is the inverse of the logarithm of
the magnitude of the transform of the signal:
a,[] = F-{loglX(w)}
=
:[-]
- +2*[-]
(4.6)
where x[r] is the complex cepstrum of x(t).
The first property of minimum-phase signals and Equation 4.6 leads to the following
[5]:
(4.7)
[ ,T] = a [T]tmin [T],
where
Lmin[T]= 2[,[] -
[T].
(4.8)
In Equation 4.8, [r] is the unit step function and [r] is the delta function.
The second property of minimum-phase signals indicates that the real cepstrum
of the total signal and the real cepstrum of the minimum-phase component are equal.
See Figure 4-2.
X(w)
x(t) --
.logX(w) -
IFT
CX[T]
-
II
Xmin(t)-
L
Xmin (w)
Figure 4-2:
loglXmin(W)
/iosix,,(w)
/
II
IPT
,
minFT
T]
x,mi[r]
[r] and ax,mi,[T] are equivalent.
Then according to Equation 4.7, [r] and Xmin[T]are equivalent. Therefore, the
complex cepstrum of a signal can be calculated by first calculating the real cepstrum
17
and then using Equation 4.7. This is advantagous because when calculating the
complex cepstrum directly, we must take the complex logarithm of the phase of X (w).
To take the logarithm successfully, the phase must be a continuous function; however,
the phase is ambiguous since any integer multiple of 27rcan be added to the phase of
X(w). Before taking the logarithm, an intermediate step to insure continuity of the
phase is necessary.
[5].
The subtraction method requires the transfer function. Using an approximation
of the transfer function is not very effective. The impulse response of the channel
contributes impulses to the high cepstrum of the received signal. An estimate of the
impulse response is not going to exactly cancel all the impulses. See Figure 4-3. These
high cepstrum components will corrupt the recovered signal. In Figure 4-4, we can
see the corruption of the received signal when an inexact impulse response is used.
A more ideal recovery process would be robust to inexactness in the impulse
response measurement. A method called cepstral smoothing [3]is actually independent
of the impulse response. The basic idea is to separate the cepstrums of the signal and
the impulse response and then extract only the information relevant to the signal.
4.2
Separation of x[T] and h[r]
If we examine the pertinent signals in the cepstral domain, we can see the the original
signal and the transfer function occupy different regions of the cepstrum. See Figure 45. The signal occupies "low-time" cepstrum [9] and the transfer function occupies
"high-time" cepstrum. These will be referred to as low cepstrum and high cepstrum.
The cepstral domain gives us a view of the variability of the Fourier transforms
of the signals we are analyzing. In Figure 4-6(b), the frequency response has higher
rates of variability than in Figure 4-6(a). Therefore, the cepstrum of the signal in
Figure 4-6(b) occupies a higher part of the cepstrum than the signal in Figure 4-6(a).
In other words, the "frequencies" of the frequency response are higher in the signal
in Figure 4-6(b) than in the signal in Figure 4-6(a).
18
1
I
I
I
I
I
I
I
I
0.5
CI
-0.5
-1
I
I.,
I
0
1
I
.
Ir
0.002
-
I
J
I
I
1,
I
I
I
I
Iur
I
0.004 0.006 0.008 0.01 0.012 0.014 0.016
(a) Cepstrum, Using the Estimated Impulse Response
I
I
I
I
I
i
I
I
I
I
I
Il~7..
0.018
I
I
I
I
0.02
0.55
C
-O.1 5
-1
0
0.002
I
I
0.004 0.006 0.008 0.01
0.012 0.014 0.016
(b) Cepstrum, Using the Exact Impulse Response
0.018
0.02
Figure 4-3: Plots of (r) - h(r), for exact and inexact impulse responses.
4.3
Cepstral Smoothing
The idea behind cepstralsmoothingis that the signal to be recoveredand the transfer
function of the channel occupy different areas of the cepstrum. As shown in Figure 47, we are using a Hanning window to isolate the low cepstrum:
(t)0.5- 0.5cos{2r(t- T/2)/T} if-T/2 < t < T/2
otherwise.
hannng(t)
O
(4.9)
otherwise.
The method for choosing the value for T is explained in Appendix A. The high
cepstrum is eliminated and only the low cepstrum occupied by the signal remains.
However, depending on the value of T, the recovered signal may not be exactly the
19
4
-
2
Actual Impulse Response
Estimated. Impulse Response
0
-2
-4
0.285
0.295
(a) Seconds
0.29
0.1
0.04
0.05 r
0.02
a\
·
_
L
0.305
0.3
0
v
-0.02
-0.05
_n i
_
0.28
.
0.3
_nv.v28-r
nA
.~~~~~~~~~
0.32
0.28
0.34
(b) Seconds
0.3
0.32
0.34
(c) Seconds
Figure 4-4: (a) Impulse responses, (b) Recovered signal using exact impulse response,
(c) Recovered signal using inexact impulse response.
original signal. It will be the same frequency, but may be of a different pulse length.
More discussion is in Appendix A.
The obvious advantage here is that our recovery method is independent of the
transfer function. Therefore, recovery has become robust to changes in the transfer
function due to the variations in the propagation channel.
In Figure 4-8, the recovery process is shown from left to right and up and down.
The x-axes of the plots of the signal, impulse response, received signal, and recovered signal is seconds. For the cepstrums, it is the r domain. Notice that we have
lost information about the time of the first return. We will recover this timing in
Chapter 6.
20
.4
0.5
0
1
1.5
2
2.5
3
Cepstrum
x 10-3
Figure 4-5: Separation of signal and impulse response in cepstral domain
0
-1
a)
03
( -3
-4
,
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Hertz
2.5
044
x 10
r
()
"o
-0
03
('S
C
-2
-1.5
-1
-0.5
0
Hertz
0.5
1
1.5
2
2.5
4
x 10
Figure 4-6: (a) Slowly varying frequency response, (b) Quickly varying frequency
response.
21
I
0
0.5
1
1.5
2
2.5
3
Cepstrum
103
Figure 4-7: Hanning windowing of cepstrum signal.
I, I
v.
.
I
I
0
_
0
-- _.v..
\[\I\I\/
0
5
10
15
Signal
0.2
x 10
-4
I
-- k.... i
-..
0
-1 I
0
_
eJ
0.27
0.28
0.29
Channel Response
1
.
.
.
0
~1n
-5
0.27
.
-5
0.28
0.29
Received Signal
0.5
1
1.5
2
Cepstrum of Received x 10-3
0.2
0
-0.2
-
0
0.5
1
1.5
2
After Cepstral Smoothing 10- 3
0
0.5
1
1.5
Recovered Signal
Figure 4-8: Signal recovery using cepstral smoothing.
22
2
x 10 - 3
Chapter 5
Adding Noise
In these simulations we added zero mean Gaussian noise at different levels of variance.
5.1
Signal-to-Noise Ratio
The signal-to-noise ratio (SNR) is calculated by looking at the power spectra of the
noise and the received signal strength. Since the signal is narrowband, only the power
levels in a narrowband around the carrier frequency are considered. The ratio is the
average noise power divided by the average signal power in this narrowband.
See
Figure 5-1.
rA
cc
aE.
5
Hertz
4
x 10
Figure 5-1: Signal-to-noise ratio calculated in the shaded regions.
The cepstral smoothing method performs well in the presence of ambient noise.
23
We can explain why by examining the effect of the added noise to the received signal
in the cepstral domain.
Unfortunately, addition in the time domain does not map to a convenient function
in the cepstral domain because the relationship is non-linear. In the simulations, noise
is added after convolving the signal with the impulse response,
y(t) = [x(t) * h(t)] + n(t).
(5.1)
When we take the logarithm of the magnitude of the frequency response,
loglY(w)l = loglX(w)H(w) + N(w)j
= loglX(w)H(w)(1+ K(w))j,
where
N(w)
K(w) = X(w)H(w)
(5.2)
Therefore,
loglY(w)l = loglX(w)l+ loglH(w)l+ logll + K(w)l,
loglY(w)l = loglX(w)j + loglH(w) + N"(w).
The inverse Fourier transform of the last term, N"(w), can be considered the effect
of the noise in the cepstral domain, h"[r].
The general shape of the Fourier transform of Gaussian white noise, N(w) is a
constant function with many local variations. See Figures 5-2(c,d). As the amplitude
of the noise is increased in the time domain (more noise is added), the magnitude of
N(w) increases. As the magnitude of N(w) increases, N"(w) also increases. However,
the shape remains the same. So in effect, it is as if a DC component has been added.
See Figure 5-2. When the inverse transform of N"(w) is taken ("[r]) to see the
effect of noise in the cepstral domain, this DC component maps to the point r = 0.
24
X 10 - 4
iI I
.
0
_
·
·
I
C
n
-1 L
-- I I
0.02
0.03
0.01
(a) Noisel, Seconds
0
I
I -
0.04
0
0.03
0.02
0.01
(b) Noise2, Seconds
0
0.04
0
m -20
-40
I,
IL
-2
a -20
pm__uIII
.
-2
x
10 4
0
2
(d) FFT of Noise2
,
.
.
f
-40
LI
2
0
(c) FFT of Noisel
x
104
.
.
.
0
m -20
- -40
-60
I
0 1
Ii
'1
0
41
1A.
m -20
-40
I
-2
0
(e) N"(w)
lilrvr
lfllpRIlif*· FiprigvTln
-60
-2
2
x 104
0
(f) N"(w)
2
x 104
Figure 5-2: (a) Noisel such that the SNR is 75 dB, (b) Noise2, 15 dB, (c) FFT of
Noisel, (d) FFT of Noise2, (e) N"(w) for Noisel, (f) N"(w) for Noise2.
Therefore, for stronger noise levels, the cepstrum of the signal is larger at
=0.
Again, for T f: 0, fi"[T] doesn't change significantly. See Figure 5-3.
5.2
Matched Filtering
In hopes of improving the signal recovery we match filter the received signal. The
matched filter, m(t), is the time reverse of the original signal, x(t);
m(t)=
x
x(to-t)
for0<t<to
0
otherwise.
This to is the pulse length of the signal.
25
(5.3)
I
3
·
-SNR
2
= 15 dB
- - SNR = 5 dB
.....
SNR =.5 dB
I
i
1
0
0
0.l
O
1. 5
1
0.5
x 10-3
(a) Cepstrum
I
I
I
I
I
-
3,
2e
I
- - SNR=5dB
-i
....
1
SNR = 15 dB
SNR = .5 dB
I
\,
"
C
0.5
0
1
1.5
(b) Cepstrum
2
2.5
x 10 - 4
Figure 5-3: (a) Cepstrums of noise effect, F- 1 {logl1 + K(w)l), are similar, (b) Dif-
ference at
= 0.
The result after matched filtering is
= y(t) *m(t)
Ymatched(t)
(5.4)
The matched filtering will cut out all noise that is not in the bandwidth of the original
signal. Furthermore, much of the noise in the signal's frequency band will also be
filtered out since it is not correlated with the signal [6]. The matched filtering permits
signal recovery (shape, not timing) with the signal-to-noise ratio as low as -1 dB. This
is an improvement of approximately 16 dB over the system without matched filtering.
In Figure 5-4 [Tr]is plotted for different noise levels. In this figure, we are illustrating
that as the noise increases, the cepstrum of the received signal becomes corrupted.
26
In Figure 5-4(al) the low cepstrum component from the signal is visible. However,
in Figure 5-4(a2) the low cepstrum component from the signal is not distinguishable
from the rest of the cepstrum.
We cannot definitely say, that the low cepstrum is
indeed the result of the signal. While comparing it to the cepstrum of pure noise in
Figure 5-5, we cannot distinguish one from the other. Signal recovery breaks down.
In Figures 5-4(bl,b2) the plots are the resulting
[r]'s after matched filtering. The
low cepstrum component corresponding to the signal is still distinguishable even if the
noise power is higher than the signal power (i.e. -1 dB SNR). Matched filtering also
improves the minimum signal-to-noise ratio at which we can do the timing recovery
described in the next chapter.
0.5
,,
U.,
0.2
0.1
0
0
-0.1
-0.2
nr
0
0.5
1
1.5
(al)
2
0
0.5
x10 - 3
1
(bx)
1.5
1
1.5
2
x10 - 3
0.2
0.1
0
-0.1
A')
-v.0
0
0.5
1
(a2)
1.5
2
0.5
(b2)
x 10 - 3
2
-3
x 10
Figure 5-4: (al),(a2) [T]'swithout matched filtering for noise levels of 15 dB and 6
dB respectively; (bl), (b2) [T]'s after matched filtering for noise levels of 0 dB and
-1 dB.
27
0.5
C
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
(a) Cepstrum
0.5
i
-0.5
0
I
I
I
I
I
I
I
0.5
1
1.5
2
I
I
I
5
x 10-3
I
I
2.5
3
(b) Cepstrum
I
3.5
I
I
I
I
4
4.5
5
X 10
-3
Figure 5-5: (a) Cepstum of Gaussian white noise, (b) Cepstrum of received signal
with 7dB of noise, no matched filtering.
28
Chapter 6
Timing Recovery
Although a representative of the original signal is recovered in the minimum-phase
recovery, the timing of the received signal is lost.
The timing we are interested in is the time that it takes for the signal to be sent
out and return along the shortest path, tobject.That is, the time it takes for the signal
to travel back and forth on the path A as shown in Fig 6-1. This will directly give us
the distance to the detected object.
Sea Surface
it
I
~~~~ '"""
-'_
Sea Bottom
Figure 6-1: Shallow water channel.
The signal received, which includes paths B, C (Figure 6-1), and paths with more
surface and bottom reflections, is shown in Figure 6-2. It is the superposition of
the signal returns from all of the different paths. Since A is the shortest path, it
causes the earliest signal return. We can determine
tobject
by seeing where in time the
received signal begins. According to Figure 6-2, tobject is 0.28 s.
29
4A
2
0
. . . . . . . .. . . . . .. . . . .
. . . .· .· .· .· .·..·
-2
-4
_rl
0.28
0.285
0.29
(a) Impulse Response
0.05
_ .........
..
I
I
. ..
. ...........
(b) Signal
~~__I_
: ..
_
.....
I
. :.......
0
_
'
'I!"
0
0.278
I
.... ; ',
..........
40
.
r,
-U.Uo
..
x10-
..
........
:
I0.
0.28
0.282
I
0.284
0.286
0.288
(c) ReceivedSignal
I
i
I
0.29
0.292
0.294
Figure 6-2: (a) Impulse response, (b) Original signal, (c) Impulse response convolved
with signal, received signal, tobject= 0.28 s.
Moving RMS Window
The root-mean-square (RMS) value is a measurement of the amount of power in a
signal. If we look at small time windows of the signal then we can calculate the
amount of power in these time windows. When a moving RMS window is applied to
a signal, the result is the following. The value of the resulting signal at time to is the
RMS value of a window of the signal from time to to to + t, where t is the width of
the time window,
Xrms(t)
This resulting signal,
=
j/ot
x2 (t)dt.
(6.1)
rms(t), will show a peak at the first time when the power of
the received signal is significantly above the noise. This peak is at
tobject.
Depending on the size of the window, rms(t), will actually start to increase before the signal x(t) begins to grow. A cursory explanation is that
information about x(t + t).
rms(t) contains
One way to decide the timing of the signal, tobject,
by determining the time when Xrms reaches a threshold value. For example, if the
threshold is 0.9 x 10 - 4 units of power, then according to Figure 6-3(a), the timing
30
x 104
(a) After RMS Windowing
0.278
0.28
0.282
0.284
0.286
0.288
(b) ReceivedSignal
0.29
0.292
Figure 6-3: (a) After RMS windowing, Xrm,,,(t),(b) Received signal, y(t).
is approximately
tobject = 0.28 s. From Figure 6-3(b) we can check that 0.28 s is
approximately where the received signal begins.
As noise increases, the peaks become less defined. In Figure 6-4 we see the minimum SNR for successful timing recovery (no matched filtering), is 9 dB. The timing
for the signal with SNR of 0 dB cannot be successfully recovered because the peaks
are not well enough defined over the noise. If the threshold is defined as 3 x 10 - 4
units of power, we can recover the timing from the signal of 9 dB SNR, but we cannot
from the signal of 0 dB SNR.
Another way to determine the timing is to see when
rmS(t) has it's first peak
which is significantly (say 1.5 times) the level of the noise floor. In Figure 6-5(bl)
(using matched filtering) the noise floor is at approximately 1.5 x 10
-4
units of power.
The first peak significantly above that is at t = 0.281 s. In Figure 6-5(b2) the noise
floor is at 2
x 10
- 4
. The first peak significantly above that is at t = 0.286 s, not the
correct peak. The noise level is too high. With matched filtering, timing recovery is
possible for an SNR of 0 dB, but -1 dB is too much noise for effective recovery.
For total signal recovery, shape and timing, we need to exceed the minimum SNR
31
-4
x 10
0.28
0.285 0.29
(al)
0.295
0.28
0.285 0.29
0.295
(bl)
x 10
0.6
3
0.4
0.2
0
-0.2
-0.4
---
0.28
----
---
0.285 0.29
(a2)
----
0.295
0.28
0.285 0.29
(b2)
0.295
Figure 6-4: Without matched filtering: (al) Received signal, SNR = 9 dB, (bi) After
RMS windowing, SNR = 9 dB, (a2) Received siganl, SNR = 0 dB, (b2) After RMS
windowing, SNR = 0 dB.
for both signal shape recovery (Chapter 5) and signal timing recovery (Chapter 6).
For the recovery method of cepstral smoothing, matched filtering, and rms windowing,
the minimum SNR for shape recovery is -1 dB. And the minimum SNR for timing
recovery is 0 dB. Therefore, the method is valid as long as the SNR is greater than 0
dB.
32
1
4-
0.2
0.1
01~
ITIIp
fIr
? 11'
I'T I-
11"
7
-0.1
-0.2
0.28
0.285
0.2 I
I - 7q
0.29
(al)
.
0.295
(bl)
.
,
I
0.1
0
-0.1
,. .
o
0.28
.
0.285
.
0.29
(a2)
I
.~~~~~~~~~~~~~~~~~~~
0.28
0.295
0.285
0.29
(b2)
0.295
Figure 6-5: With matched filtering: (al) Received signal, SNR = 0 dB, (bl) After
RMS windowing, SNR = 0 dB, (a2) Received siganl, SNR = -1 dB, (b2) After RMS
windowing, SNR = -1 dB.
33
Chapter 7
Two Targets
Because of the reverberant tails, a received signal is relatively long in time duration
compared the to the original signal. Hence, it is possible that two signals are so closely
spaced in time that the target returns are overlapping. Recovery is still possible using
minimum-phase processingand cepstral smoothing. However, the Hanning window
must be modified [4].
Here we will consider two targets in the channel creating two overlapping received
signals. See Figure 7-1. Each target reflects back a group of returns, yl(t) and y2(t).
The result is a superposition of the two signals,
Ytotal(t) = yl(t) + y2(t).
(7.1)
Each of these received signals is the convolution of the sonar signal with the channel
impulse response. That is,
yl(t) = x(t) * hl(t),
y2(t) = x(t) * h2(t).
Note that the channel response is dependent on the range of the object from the
source and receiver. This is why hl(t) and h2(t), the channel impulse responses of
each of the targets, are different. In this chapter, we are going to assume that the
34
Sea Surface
D
Sea Bottom
Figure 7-1: Two targets.
distance between the targets allows us to approximate hl(t) and h2(t) as follows:
hi (t) = h2(t- t),
(7.2)
where t is the difference in travel time of the first response from target 1 and the
first response from target 2. In effect, we are assuming that the impulse response of
the channel is the same for both target locations except for a time delay of to.
Using the approximation if Equation 7.2, the double target received signal is the
received signal of one target convolved with a double impulse separted by t.
See
Figure 7-3(a). The cepstrum of double impulses is an infinite impulse train of the
same spacing as the impulses in the time domain as shown next.
If m[n] is the double impulse (most easily analyzed in the discrete-time domain
because there are only two non-zero points) [7, 4],
m[n] = 6[n]+ a6[n - N],
(7.3)
where [n] is the delta function and a is a constant less than 1, then the Z-transform
is
M(z) = 1 + az - N,
(7.4)
and the log of the Z-transform is
M(z)= log(1+ az-N )= (-1)n+1l
n=1
35
°
-nN
(7.5)
Taking the inverse transform gives us the complex cepstrum,
m[- = (-1)r1
r=l
_6(T - rN),
r
(7.6)
an infinite impulse train spaced by N.
Note that N corresponds to t divided by the sampling rate of this discrete-time
analysis.
Since convolution in the time domain maps into addition in the cepstral domain,
the cepstrum of the double target is the cepstrum of the single target added to the
cepstrum of the double impulse. That is,
ytotal(t)= y(t) * mln],
(7.7)
Ytotal(T)
= (T)
) + (T).
(7.8)
I
0.5
0
-0.5
_4
0
1
2
I
I
1
2
2
3
(a) Cepstrum
4
5
6
x 10o
I
1
0.5
0
-0.5
-1
0
3
3
(a) Cepstrum
4
5
6
x 10-3
Figure 7-2: (a) Cepstrum of the multi-target signal, (b) Cepstral smoothing window.
The cepstrum of the double target signal occupies the low cepstrum like the single
target signal, but it also includes the infinite impulse train of spacing N. Therefore,
to recover all of the signal cepstrum from the received signal's cepstrum we need to
36
adjust the cepstral smoothing window to include this impulse train. See Figure 7-2.
The new cepstral smoothing window is the same low-time Hanning window with
a comb-like window to include the impulse train. The spacing, N, can be found from
the received signal's cepstrum. The distance to the first peak is N. When there is no
noise, the cepstrum of the received signal has many peaks from the impulse response.
See Figure 4-5. However, when noise is added these peaks quickly disappear.
See
Figure A-4(b). So, the only peaks are a result of the double target. The comb-like
window can then be created to have a comb at locations rN where r is the tooth
number and goes from 1 to oo.
0
0.001
0.002
0.003
0.004 0.005 0.006
(b) Seconds
0.007
0.008
0.009
0.01
Figure 7-3: (a) Multi-target signal, t = .002s, (b) Recovered signal.
The cepstrum of the double impulses is an exponentially decaying infinite impulse
train. So, it is sufficient to only include the first two or three impulses in the new comblike cepstral smoothing window. This, however, creates a slight problem. When we
convert back to the time domain, the now finite impulse train will become an infinite
train in the time domain. Therefore, the new recovered signal will be an infinite train
convolved with the new signal. Fortunately, the infinite train is exponentially decaying
so by the third occurrence of the signal, the magnitude is significantly smaller than
37
the first two signals. The original received signal and the recovered signal are shown
in Figure 7-3. Note how the time separation, to, has been recovered.
38
Chapter 8
Conclusions
In this thesis simulations have been done to successfully recover a sonar signal from the
received signal which is corrupted with both ambient and reverberant noise. Testing
was done for a channel with the following parameters (See Figure 8-1):
D = Channel Depth = 35 m
Ds = Depth of Source and Receiver ranges from 3 to 32 m
Dt = Depth of Target ranges from 3 to 32 m
L = Range to Target from Source = 210m
Sea Surface
)t
r
Target
Sea Bottom
Figure 8-1: Shallow water channel.
The signal used was a 10 kHz gated sine wave of pulse length 3.3 x 10 - 4 S with a
3 kHz bandwidth. These simulations presented were done for fixed values of channel
depth and object range. However, the phenomenologies and techniques for cepstral
smoothing and minimum-phase processing are applicable to other shallow water envi39
ronments. An explanation of how to adapt the system to other channels and signals
is given in Appendix A.
Reverberation noise was eliminated by using cepstral smoothing. The received
signal is the convolution of the sonar signal and the impulse response in the time
domain. However, in the cepstral domain, the received signal is the superposition of
the cepstrums of the signal and the impulse response (Chapter 4). Additionally, the
cepstrum of the signal occupies low cepstrum (Chapter 4) and the cepstrum of the
impulse response occupies high cepstrum. Therefore, the signal's cepstrum can be
extracted by "low-time" cepstral filtering. That is, by cutting out the high cepstrum
components. Details about defining the cut-off between low and high cepstrum are
in Appendix A.
The combination of minimum-phase processing and cepstral smoothing proved to
be quite robust to ambient noise. Signal recovery was successful for signal-to-noise
ratios down to 15 dB. If the received signal was first matched filtered (Chapter 5) with
the time reverse of the original signal and then run through the minimum-phase and
cepstral smoothing processing, signal recovery was then possible for signal-to-noise
ratios down to 0 dB.
Since we are using minimum-phase processing we have lost the linear time shift
of the signal to the all-pass components (Chapter 3). In other words, we have only
recovered the frequency and approximate shape (Appendix A) of the original signal.
To determine the distance from the sonar source to the detected target, we need
the timing information of the received signal (Chapter 6). This timing recovery was
robust for signal-to-noise ratios down 9 dB (without matched filtering). After matched
filtering, the recovery works down to 0 dB.
The signal frequency, shape, and timing must all be recovered. Therefore, the
system works for signal-to-noise ratios down to 0 dB when matched filtering is used
(15 dB if matched filtering is not used). The case of two targets in the channel was
also explored. Signal recovery is possible by modifying the cepstral smoothing window
to include a comb-like window (Chapter 7).
40
Future Work
There are two areas in which future work is recommended: timing recovery and
multiple targets.
Although the moving RMS windowing is quite robust to ambient
noise, improvements can be made. With the present system deciding when the peaks
are not well enough defined is an arbitrary process. Something more exact, like a
defininte threshold or a system of quantifying the definition of a peak is necessary.
The issue of multi-targets is more important.
It is very unlikely that only one
target will be in range at a given time. However, since the processes for one target
recovery and two target recovery are different, we need to know when to use which
recovery scheme. Also, the recovery method for two targets can only be extended to
multi-targets that are equidistant from each other. This is because the effective signal
(impulse train convolved with the sonar signal) needs to be minimum-phase for the
processing technique to work [4]. Equal spacing between targets is very unrealistic,
so a more versitle method is needed.
41
Appendix A
Choosing Cepstrum Cut-off for
Cepstral Smoothing
The cut-off point for cepstral smoothing is dependent on both the impulse response
of the channel and the sonar signal.
A.1
Impulse Response
Fortunately, we can determine what part of the cepstrum the impulse response occupies by an indirect method. That is, we don't need to know the impulse response
itself. The location of the beginning of the cepstrum of the impulse response is dependent on the time difference between the first two returns. The first return is the
shortest distance, the direct path, to the detected object, and the second return is
the path which has one reflection off of either the bottom or top of the channel. See
Figure A-1. Generally, as seen in Figures A-2 and A-3, the smaller the time variation, the earlier in the cepstrum the impulse response starts. When doing cepstral
smoothing we want to cut off in the cepstral domain at i before the impulse response
begins. This Tiis the maximum r such that we can eliminate the effects of the impulse
response.
Geometrical analysis shows that the minimum difference between the first and
second returns occurs when the source depth, Ds, and the target depth, Dt, are
42
Target Image
)t
I
Target Image
Figure A-1: First and second signal paths.
chosen to minimize the difference between either B and A or C and A in Figure A-1.
The minimum value of all possibilities of B - A and C - A is the minimum difference
between the first and second path returns. Equations for A, B, and C follow:
A = directpath
=
L2 + (Dt- Ds)2,
B =
L2 + (Dt + Ds)2 ,
C =
L2+ ((D- Ds)+ (D-Dt))2.
The minimum difference between the first and second returns for the channel of
depth 35m occurs when the source and target are close to the surface or bottom. We
let this minimum distance be 3m. The resulting ri is 1 x 10 - 4 s.
43
Q
x10
I
-2
-4
75
0.28
0.285
0.295
0.29
0. 3
Seconds
n
v.<
..
A.
U
r,
I
0.1
I
0.2
0.3
0.4
I
0.5
0.6
Cepstrum
0.7
I
I
0.8
0.9
X1
3
Figure A-2: (a) Impulse response with Dt=15m, Ds=5m, D=35m, L=210m, (b)
Cepstrum of impulse response.
.x10l
Jl
!L
2
0
-2
-4
-- i.
T·
0275
0.28
I
I
0.285
0.29
0.295
0.3
Seconds
Iv.u
I.
·
·
·
·
0
r
I
0.1
I
0.2
0.3
I
0.4
0.5
0.6
Cepstrum
I
0.7
0.8
0.9
1
x1
Figure A-3: (a) Impulse response with Dt=3m, Ds=3m, D=35m, L=210m, (b) Cepstrum of impulse response.
44
A.2
Signal
First let's examine the cepstrums of some signals of various time durations. In Figure A-4 all the signals are 10 kHz pulses with time durations of 2 x 10 - 3 s, 6.7 x 10- 4
s, and 4 x 10- 4 s. (These durations correspond to the widths of the central peak of
the sinc function in the frequency domain being 1 kHz, 3 kHz, and 5 kHz.) We can
see that the as the pulse length decreases, the width of the low cepstrum component
also decreases. Also from Figure A-4, we can see that the frequency of the signal is
identical to the frequency of the low cepstrum component.
Cepstrums
Signals
0.05
0.5
0
0
-0.05
He
0
2
4
(al)
6
x 10-4
4
(a2)
6
x10
-0.5
0
1
2
3
4
x 10-4
(bl)
Ai
U.UO
0
uC
uI ;
V'VY
I
0
2
0
1
2
3
4
(b2)
x10
eI
U.3
I
-
0 (l
n
0
2
4
(a3)
6
x 10
0
4
1
2
3
(b3)
4
x 10
Figure A-4: (a) Signals of 10kHz carrier, (b) Cepstrums.
When we do the cepstral smoothing, we are not actually recovering the original
signal. We are recovering a signal of the same frequency content but of perhaps a
different pulse length. This pulse length is dependent on where the cepstrum is cut
off when doing the cepstral smoothing. We will call this %T,the minimum
T
at which
we can cut off in the cepstral smoothing process.
In Figure A-4 we see that as the length of the signal pulse is decreased, the width
of the low cepstrum component of the signal is also decreased. This leads us to believe
that the opposite is true. That is, the lower
45
T8
is, the shorter the pulse length of the
recovered signal. For our purposes, the actual signal length of the recovered signal
does not have to be the same as the original signal. However, we would like to be able
to identify the recovered signal as being the same frequency as the original signal.
Therefore, we must recover a signal that is at least half a wavelength so that we can
determine the frequency. For a signal of 10kHz, half a wavelength is 5 x 10 - 5 s. So
Ts >
5x
10
- 5
s. Examples are in Figure A-5.
Putting the constraints from the impulse response and the signal together,
Ts < Tc < i,
(A.1)
where rc is the r at which the cepstrum of the signal is cut off in the cepstral smoothing
process. For a signal of 10kHz in a 35m channel, 5 x 10 - 5 < ir < 1
V~U-- -
0.5 .
-
10-4.
0.5 NV v
0
0.5
1.5
1
(bl)
2
x10 3
2
C
0.5
1
(a)
1.5
-2
2
--0.5
1.5
(cl)
1.5
2
x10
0.2.
~
1
1
0.2
I
IA
0
0.5
(b2)
1
-1 1/
0
x 10
2
0
x 10
I
1(
5
4
(dl)
x 10-
5
(d2)
x 10
1
1
0
0.5
1
(c2)
1.5
0
2
x 10
10
Figure A-5: (a) Cepstrum of signal, (b) Ts = 5 x 10 - 4 , (c) Ts = 2 x 10 - 4 , (d)
-r, = 1 X 10-4. The ()'s are the cepstrum, and the (2)'s are the recovered time
domain signals.
46
Bibliography
[1] A. Drake, Fundamentals of Applied Probability Theory, McGraw-Hill, 1967.
[2] L. Liu and R.H. Lyon, Application of group delay to noise problems, In Pro-
ceedings of Noise-Con 91 (1991).
[3] R.H.
Machinery Noise and Diagnostics, Butterworths-Heinemann,
Lyon,
Boston, 1986.
[4] D.J. McCarthy, Vibration-BasedDiagnostics of ReciprocatingMachinery, PhD
thesis, Massachusetts Institute of Technology, 1994.
[5] A. Oppenheim and R. Schafer, Discrete-Time Signal Processing, Prentice Hall,
1989.
[6] A. Papoulis, Probability, Random Variables, and Stochastic Processes, McGrawHill, 1991.
[7] L. Rabiner and R. Schafer, Digital Processing of Speech Signals, Prentice Hall,
Englewood Cliffs, NJ, 1978.
[8] W. Siebert, Circuits, Signals, and Systems, The MIT Press and McGraw-Hill,
1986.
[9] M. Tohyama, R.H. Lyon, and T. Koike. "Inverse filtering for reverberant transfer
functions",
In Proceedings of the International Union of Theoretical Applied
Mechanics, Tokyo, Japan (May 1992).
47
[10] M. Tohyama, R.H. Lyon, and T. Koike, "Reverberent phase in a room and
zeros in the complex frequency", Journal of the Acoustical Soceity of America,
89(4):1701-1707 (April 1991).
[11] M. Tohyama, R.H. Lyon, and T. Koike, "Pulse waveform recovery in a reverber-
ant condition", Journal of the Acoustical Soceity of America, 91(5):2805-2812
(May 1992).
[12] M. Tohyama, R.H. Lyon, and T. Koike,
functions",
"Statistics on reverberant transfer
In Second International Congress on Recent Developments in Air
and Structure-Borne Sound and Vibration - Auburn University, Alabama (1992).
[13] M. Tohyama, R.H. Lyon, and T. Koike,
"Phase variability and zeros in
a reverberent transfer function". Journal of the Acoustical Soceity of America,
95(1):286-296, (January 1994).
48