ETNA
advertisement

ETNA
Electronic Transactions on Numerical Analysis.
Volume 37, pp. 214-238, 2010.
Copyright 2010, Kent State University.
ISSN 1068-9613.
Kent State University
http://etna.math.kent.edu
A WEAKLY OVER-PENALIZED SYMMETRIC INTERIOR PENALTY METHOD
FOR THE BIHARMONIC PROBLEM∗
SUSANNE C. BRENNER†, THIRUPATHI GUDI‡, AND LI-YENG SUNG†
Abstract. We study a weakly over-penalized symmetric interior penalty method for the biharmonic problem that
is intrinsically parallel. Both a priori error analysis and a posteriori error analysis are carried out. The performance
of the method is illustrated by numerical experiments.
Key words. biharmonic problem, finite element, interior penalty method, weak over-penalization, Morley element, fourth order
AMS subject classifications. 65N30, 65N15
1. Introduction. Recently, it was noted in [9] that the Poisson problem can be solved by
a weakly over-penalized symmetric interior penalty (WOPSIP) method [10, 12, 25] with high
intrinsic parallelism. The WOPSIP method satisfies the same error estimates as the standard
P1 finite element method and also the same condition number estimates after preconditioning. Furthermore, there exist two orderings (edge-wise and element-wise) of the degrees of
freedom (dofs) so that the stiffness matrix for the WOPSIP method is the sum of two matrices, each of which is block diagonal with respect to one of these two orderings. In fact, the
matrix representing the piecewise Dirichlet form has 3 × 3 diagonal blocks with respect to
the element-wise ordering of the dofs, while the matrix representing the jumps across edges
has 1 × 1 or 2 × 2 diagonal blocks in the edge-wise ordering. The simple preconditioner is
also block diagonal with 1 × 1 or 2 × 2 blocks in the edge-wise ordering of the dofs. These
properties of the WOPSIP method make it an attractive candidate for iterative solvers for the
Poisson problem.
In this paper, we extend the WOPSIP approach to fourth order problems and develop a
method that also has high intrinsic parallelism. For simplicity, we consider the biharmonic
problem on a bounded polygonal domain Ω ⊂ R2 .
Let f ∈ L2 (Ω). A weak form of the biharmonic problem is to find u ∈ H02 (Ω) such that
(1.1)
a(u, v) = (f, v)
∀ v ∈ H02 (Ω),
where
a(w, v) =
D2 w : D2 v =
Z
D2 w : D2 v dx
Ω
2
X
∀ v, w ∈ H02 (Ω),
∂2w
∂2v
,
∂xi ∂xj ∂xi ∂xj
i,j=1
and (·, ·) denotes the L2 inner product. Here and throughout the paper, we follow the standard
notations for Sobolev spaces [1, 16].
∗ This work was supported in part by the National Science Foundation under Grant No. DMS-03-11790, Grant
No. DMS-07-38028, and Grant No. DMS-07-13835.
† Department of Mathematics and Center for Computation and Technology, Louisiana State University, Baton
Rouge, LA 70803 ({brenner,sung}@math.lsu.edu).
‡ Center for Computation and Technology, Louisiana State University, Baton Rouge, LA 70803
(tgudi@cct.lsu.edu).
∗ Received July 27, 2009. Accepted February 4, 2010. Published online on July 23, 2010. Recommended by
Olof Widlund.
214
ETNA
Kent State University
http://etna.math.kent.edu
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
215
Conforming finite element methods for (1.1) require C 1 finite elements [3, 15] that
involve higher order polynomials and hence are quite complicated. Alternatively, one can
solve (1.1) by nonconforming finite elements that involve only low order polynomials. The
WOPSIP method in this paper is based on the Morley element [23, 26]. By removing the
continuity conditions of the Morley element through weak over-penalization, we obtain an
intrinsically parallel finite element method for (1.1).
Our goal is to demonstrate theoretically and numerically that the performance of the
WOPSIP method is similar to the performance of the Morley finite element method (in terms
of the magnitudes of the discretization errors), and that an efficient adaptive algorithm is
available for the WOPSIP method. This is an important step before the intrinsic parallelism
of the WOPSIP method is further exploited.
The rest of the paper is organized as follows. We introduce some basic definitions in
Section 2. The WOPSIP method is defined in Section 3. Section 4 contains some preliminary
estimates. The a priori analysis and a posteriori analysis of the WOPSIP method in the
energy norm are carried out in Sections 5 and 6. Some extensions of the WOPSIP method are
discussed in Section 7. Results of numerical experiments are reported in Section 8, and we
end with some concluding remarks in Section 9.
2. The set-up. Let Th be a simplicial triangulation of Ω. We adopt the following notation:
hT = diameter of T (h = maxT ∈Th hT )
he = the length of the edge e
|T | = the area of the triangle T
me = the midpoint of the edge e
Ehi = the set of all the interior edges of (the triangles of) Th
Ehb = the set of all the boundary edges of (the triangles of) Th
Eh = Ehi ∪ Ehb
Vh = the set of all the vertices of (the triangles of) Th
VT = the set of the three vertices of T
ET = the set of the three edges of T
Te = the set of the triangle(s) in Th such that e ∈ ET
Ep = the set of edges in Eh that share the common vertex p ∈ Vh
Ve = the set of the two endpoints of the edge e
vT = v|T , the restriction of the function v on the triangle T
Let k be a nonnegative integer. We define the piecewise Sobolev space H k (Ω, Th ) associated with the triangulation Th by
H k (Ω, Th ) = {v ∈ L2 (Ω) : vT ∈ H k (T )
∀ T ∈ Th },
and the semi-norm | · |H k (Ω,Th ) by
|v|2H k (Ω,Th ) =
(2.1)
X
|v|2H k (T ) .
T ∈Th
Let e ∈ Ehi be a common edge of the triangles T± ∈ Th . For v ∈ H 1 (Ω, Th ), we define
the jump [[v]]e of v across e (in the sense of trace) by
[[v]]e = v+ − v− ,
¯
where v± = v ¯T . If v ∈ H 2 (Ω, Th ) and p belongs to the closure of e, we define
±
[[v(p)]]e = [[v]]e (p) = v+ (p) − v− (p).
ETNA
Kent State University
http://etna.math.kent.edu
216
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
Let ne be the unit normal of e pointing from T− to T+ and te be the unit tangent vector
of e obtained by rotating ne through a counterclockwise right angle (cf. Figure 2.1). For any
v ∈ H 2 (Ω, Th ), we define the jumps and means of the normal and tangential derivatives of v
across e by
¯
¯
¯
¯ ¶
½½ ¾¾
·· ¸¸
µ
∂v− ¯¯
∂v− ¯¯
∂v
∂v
∂v+ ¯¯
1 ∂v+ ¯¯
,
−
and
+
=
=
∂n
∂ne ¯e
∂ne ¯e
∂n
2 ∂ne ¯e
∂ne ¯e
¯
¯
¯
¯ ¶
½½ ¾¾ e
·· ¸¸e
µ
∂v− ¯¯
∂v− ¯¯
∂v
∂v
∂v+ ¯¯
1 ∂v+ ¯¯
.
−
and
+
=
=
¯
¯
¯
∂t e
∂te e
∂te e
∂t e
2 ∂te e
∂te ¯e
If v ∈ H 3 (Ω, Th ), the pointwise values of the jumps and means of the derivatives are welldefined. Similarly, for any v ∈ H 3 (Ω, Th ), we define the jumps and means of the second
order derivatives of v across e by
¯
¯
¯
¯ ¶
·· 2 ¸¸
µ
½½ 2 ¾¾
∂ v
∂ 2 v+ ¯¯
1 ∂ 2 v+ ¯¯
∂ 2 v− ¯¯
∂ 2 v− ¯¯
∂ v
=
=
,
−
and
+
∂n2 e
∂n2e ¯e
∂n2e ¯e
∂n2 e
2
∂n2e ¯e
∂n2e ¯e
¯
¯
¯
¯ ¶
µ 2
·· 2 ¸¸
½
½ 2 ¾¾
∂ 2 v+ ¯¯
1
∂ v+ ¯¯
∂ v
∂ 2 v− ¯¯
∂ 2 v− ¯¯
∂ v
=
=
.
−
and
+
∂n∂t e
∂ne ∂te ¯e
∂ne ∂te ¯e
∂n∂t e
2 ∂ne ∂te ¯e
∂ne ∂te ¯e
P+
¡@
¡ T @
+
¡
@
ne
¡
@
¡
6
@
¾
@B
A¡
e ¡
te
@
¡
@
¡
@
T− ¡
@
¡
@
@¡
P−
F IGURE 2.1. Two neighboring triangles T− and T+ that share the edge e with the unit normal ne pointing
from T− into T+ .
Let e ∈ Ehb be an edge of the triangle T ∈ Th . We define
¯
[[v]]e = −vT ¯e
¯
¯
·· ¸¸
·· ¸¸
∂vT ¯¯
∂vT ¯¯
∂v
∂v
=−
=−
and
∂n
∂ne ¯e
∂t e
∂te ¯e
¯
¯
¾
¾
½
½
½
½ 2 ¾¾e
2
2
2
∂ vT ¯¯
∂ vT ¯¯
∂ v
∂ v
=
=
and
∂n2 e
∂n2e ¯e
∂n∂t e
∂ne ∂te ¯e
∀ v ∈ H 1 (Ω, Th ),
∀ v ∈ H 2 (Ω, Th ),
∀ v ∈ H 3 (Ω, Th ),
where ne is the unit normal of e pointing towards the outside of Ω and te is the unit tangent
vector of e obtained by rotating ne through a counterclockwise right angle.
The finite element space Vh for the WOPSIP method is the space of discontinuous piecewise quadratic polynomials associated with Th . The Morley finite element space ṼhM associated with Th is a subspace of Vh . A function v ∈ Vh belongs to ṼhM if and only if (i) v is
ETNA
Kent State University
http://etna.math.kent.edu
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
217
continuous at the vertices in Vh and (ii) ∂v/∂n is continuous at the midpoints of the edges
in Eh . The dofs for ṼhM are the values of a function at the vertices and the mean values of its
normal derivative on the edges. The interpolation operator Ih : H 2 (Ω) −→ ṼhM is defined
by the following conditions:
(Ih ζ)(p) = ζ(p)
(2.2)
Πe
(2.3)
∀ p ∈ Vp ,
∂ζ
∂(Ih ζ)
= Πe
∂ne
∂ne
∀ e ∈ Eh ,
where the projection (mean value) operator Πe : L2 (e) −→ P0 (e) is defined by
Z
1
Πe v =
v ds.
he e
It follows from (2.2)–(2.3) and integration by parts that
Z
Z
(2.4)
D2 ζ : D2 v dx =
D2 (Ih ζ) : D2 v dx
∀ ζ ∈ H 2 (Ω), v ∈ Vh , T ∈ Th .
T
T
Moreover, the Morley interpolation operator satisfies the standard [16] error estimate
(2.5)
kζ − Ih ζkL2 (T ) + hT |ζ − Ih ζ|H 1 (T ) + h2T |ζ − Ih ζ|H 2 (T ) ≤ ChsT |ζ|H s (T )
for all ζ ∈ H s (T ), 2 ≤ s ≤ 3 and T ∈ Th .
R EMARK 2.1. Throughout this paper we use C (with or without subscripts) to denote a
generic positive constant that depends only on Ω and/or the shape regularity of Th . To avoid
the proliferation of constants, we also use the notation A . B to represent the inequality
A ≤ (constant) · B, where the constant only depends on Ω and/or the shape regularity of Th .
Note that Ih maps H02 (Ω) into VhM = {v ∈ ṼhM : v vanishes at the vertices of Th along
∂Ω and ∂v/∂n vanishes at the midpoints on the boundary edges}.
Finally, we recall the definition of the Hsieh-Clough-Tocher finite element space VhHCT
associated with a triangulation Th [13, 16]. A function v belongs to VhHCT if and only if
(i) v ∈ C 1 (Ω̄) ∩ H02 (Ω) and (ii) v is piecewise cubic on each T ∈ Th with respect to the
partition generated by connecting the three vertices of T to the center of T . The degrees of
freedom of a function in VhHCT are the values of the function and its first order derivatives at
the interior vertices and the mean values of its normal derivative on the interior edges.
3. A Weakly Over-Penalized Interior Penalty Method. The WOPSIP method for
(1.1) is to find uh ∈ Vh such that
ah (uh , v) = (f, v)
(3.1)
∀ v ∈ Vh ,
where
(3.2)
ah (w, v) =
X Z
T ∈Th
+
D2 w : D2 v dx +
T
X X
X
h−2
e (Πe [[∂w/∂n]]e ) (Πe [[∂v/∂n]]e )
e∈Eh
h−4
e [[w(p)]]e [[v(p)]]e .
p∈Vh e∈Ep
R EMARK 3.1. The bilinear form ah (·, ·) is independent of the choices of T± in the
definitions of the jumps.
ETNA
Kent State University
http://etna.math.kent.edu
218
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
R EMARK 3.2. Note that, by the midpoint rule, we have
··
¸¸
·· ¸¸
∂v
∂v
=
(me )
∀ v ∈ Vh , e ∈ Eh .
Πe
∂n e
∂n
e
R EMARK 3.3. We refer to this method as a weakly over-penalized method because the
over-penalized terms are well-defined on H 2 (Ω), the Sobolev space where the weak form
(1.1) of the biharmonic problem is posed.
R EMARK 3.4. For v ∈ Vh and w ∈ VhM + H02 (Ω), we have
X Z
ah (v, w) =
D2 v : D2 w dx.
T ∈Th
T
Thus, the WOPSIP method becomes the Morley nonconforming method when restricted to
the Morley finite element space.
We will use the function values at the vertices and the values of the normal derivatives
at the midpoints of the edges as dofs for the finite element space Vh . There are two natural
orderings for the dofs. In the first ordering, where the dofs associated with a triangle T ∈ Th
are always consecutive, the bilinear form
X Z
D2 w : D2 v dx
T ∈Th
T
is represented by a block-diagonal matrix with 6 × 6 diagonal blocks. We will refer to this
ordering of the dofs as the element-wise ordering.
In the second ordering, where the dofs associated with a vertex are always consecutive
and the dofs associated with a midpoint are always consecutive, the bilinear form
X X
X
h−4
h−2
e [[w(p)]]e [[v(p)]]e
e (Πe [[∂w/∂n]]e ) (Πe [[∂v/∂n]]e ) +
p∈Vh e∈Ep
e∈Eh
is represented by a block-diagonal matrix. The diagonal block corresponding to a midpoint
is either 1 × 1 (boundary midpoint) or 2 × 2 (interior midpoint), while the diagonal block
corresponding to a vertex is m × m, where m is the number of triangles in Th that share the
vertex as a common vertex. We will refer to this ordering of the dofs as the vertex-edge-wise
ordering.
In view of this splitting of the stiffness matrix, the operation of multiplying a vector
representing the dofs of a finite element function by the stiffness matrix can be easily parallelized. Thus the WOPSIP method is intrinsically parallel.
The ill-conditioning of the WOPSIP method due to over-penalization can be remedied
by a simple preconditioner. Let the bilinear form bh (·, ·) on Vh × Vh be defined by
X · X
X ³ ∂wT ´³ ∂vT ´¸
2
Πe
Πe
bh (w, v) =
wT (p)vT (p) + hT
∂n
∂n
T ∈Th p∈VT
e∈ET
X¡
¢¡
¢
+
Πe [[∂w/∂n]]e Πe [[∂v/∂n]]e
e∈Eh
+
X X
p∈Vh e∈Ep
h−2
e [[w(p)]]e [[v(p)]]e .
ETNA
Kent State University
http://etna.math.kent.edu
219
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
The following lemma shows that the discrete problem resulting from the WOPSIP method
behaves like a typical fourth order problem after preconditioning by the operator associated
with bh (·, ·).
L EMMA 3.5. Let the operators Ah , Bh : Vh −→ Vh′ be defined by
hAh w, vi = ah (w, v)
hBh w, vi = bh (w, v)
and
∀ v, w ∈ Vh ,
where h·, ·i is the canonical bilinear form on Vh′ × Vh . Then the following condition number
estimate holds for a quasi-uniform triangulation Th :
¢
¡
λmax Bh−1 Ah
¡
¢ ≤ Ch−4 ,
(3.3)
λmin Bh−1 Ah
where λmax (Bh−1 Ah ) (resp. λmin (Bh−1 Ah )) is the maximum (resp. minimum) eigenvalue of
Bh−1 Ah .
Proof. First we note that all the eigenvalues of Bh−1 Ah are positive since both ah (·, ·)
and bh (·, ·) are symmetric positive definite bilinear forms on Vh . From scaling, we have
· X
X ³ ∂v ´2 ¸
2
2
|v|2H 2 (T ) . h−2
Πe
∀ v ∈ P2 (T ),
v
(p)
+
h
T
T
∂n
p∈VT
e∈ET
and hence
hAh v, vi = ah (v, v) . h−2 bh (v, v) = h−2 hBh v, vi
∀ v ∈ Vh ,
which together with the Rayleigh quotient formula implies
¡
¢
λmax Bh−1 Ah =
(3.4)
hAh v, vi
≤ Ch−2 .
v∈Vh \{0} hBh v, vi
max
In the other direction, it follows from a Poincaré-Friedrichs inequality for piecewise H 2 functions [14] that
³
XZ h
¡
¢2 i ´
2
−1
ds
Π
[[∂v/∂n]]
h−3
[[v]]
+
h
(3.5)
kvk2L2 (Ω) . |v|2H 2 (Ω,Th ) +
e
e
e
e
e
e∈Eh
e
for all v ∈ Vh . Furthermore, we have, by scaling and a standard interpolation error estimate
[13, 16],
´
³
XZ
XZ
I 2
I 2
−3
2
[[v
−
v
]]
+
[[v
]]
h
h−3
[[v]]
ds
≤
2
e
e ds
e
e
e
e∈Eh
e
e∈Eh
.
(3.6)
³ X Z
T ∈Th
e
I 2
h−3
T (v − v ) ds +
∂T
³
. |v|2H 2 (Ω,Th ) +
X X
p∈Vh e∈Ep
X X
p∈Vh e∈Ep
2
h−2
e [[v(p)]]e
´
2
h−2
e [[v(p)]]e
´
∀ v ∈ Vh ,
where v I is the piecewise linear polynomial such that vTI agrees with vT at the vertices of T
for all T ∈ Th . Note also that (again from scaling)
· X
X ³ ∂v ´2 ¸
Πe
v 2 (p) + h2T
(3.7)
h2T
. kvk2L2 (T )
∀ v ∈ P2 (T ), T ∈ Th .
∂n
p∈VT
e∈ET
ETNA
Kent State University
http://etna.math.kent.edu
220
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
Combining the estimates (3.5)–(3.7), we find
¸
X
∂vT ´2
kvk2L2 (T )
.
h
vT (p) + hT
Πe
∂n
T ∈Th
T ∈Th p∈VT
e∈ET
h
i
X X
X
2
−2
2
. |v|H 2 (Ω,Th ) +
(Πe [[∂v/∂n]]e )2
he [[v(p)]]e +
2
X · X
2
2
X³
p∈Vh e∈Ep
∀ v ∈ Vh ,
e∈Eh
which implies
h2 hBh v, vi = h2 bh (v, v) . ah (v, v) = hAh v, vi
∀ v ∈ Vh ,
and hence by the Rayleigh quotient formula
¢
¡
λmin Bh−1 Ah =
(3.8)
min
v∈Vh \{0}
hAh v, vi
≥ Ch2 .
hBh v, vi
The estimate (3.3) follows from (3.4) and (3.8).
R EMARK 3.6. Note that the matrix representing the bilinear form bh (·, ·) is blockdiagonal (with small diagonal blocks) in the vertex-edge-wise ordering of the dofs. Therefore
the preconditioning can also be easily performed in parallel.
4. Preliminary estimates. In this section we establish several results that are useful for
the error analysis of the WOPSIP method.
We begin by constructing a linear operator Eh : Vh −→ VhHCT by averaging. Let N be
any (global) degree of freedom of VhHCT , i.e., N (w) is either the value of a function w or its
first order derivatives at an interior vertex of Th or the mean value of the normal derivative of
w on an interior edge. For v ∈ Vh , we define
N (Eh v) =
(4.1)
1 X
N (vT ),
|TN |
T ∈TN
where TN is the set of triangles in Th that share the degree of freedom N and |TN | is the
number of elements of TN .
L EMMA 4.1. The operator Eh has the following properties :
X
(4.2)
−4
hT kv −
Eh vk2L2 (T )
≤C
¢
2
−1
2
h−3
e [[v]]e + he [[∂v/∂n]]e ds,
XZ ¡
¢
2
−1
2
h−3
e [[v]]e + he [[∂v/∂n]]e ds,
e∈Eh
T ∈Th
|v − Eh v|2H 2 (Ω,Th ) ≤ C
(4.3)
XZ ¡
e∈Eh
e
e
for all v ∈ Vh .
Proof. Let v ∈ Vh be arbitrary and w = v − Eh v. From scaling, we have
(4.4)
X
2
h−4
T kv − Eh vkL2 (T )
T ∈Th
.
X
T ∈Th
h−2
T
³ X ¡
p∈VT
´
¢ X 2
hT |(∂wT /∂n)(me )|2 .
wT2 (p) + h2T |∇wT (p)|2 +
e∈ET
ETNA
Kent State University
http://etna.math.kent.edu
221
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
It follows from (4.1), scaling, and a standard inverse estimate [13, 16] that
(4.5)
X
h−2
T
X
wT2 (p) .
p∈VT
T ∈Th
X
h−2
T
X X
[[v(p)]]2e .
p∈VT e∈Ep
T ∈Th
XZ
e∈Eh
e
2
h−3
e [[v]]e ds,
¸¸2 ··
¸¸2 ´
X X
∂v
2
(p) +
(p)
|∇wT (p)| .
∂t
∂n
e
e
T ∈Th p∈VT
T ∈Th p∈VT e∈Ep
Z
´
³
X
h−1
[[∂v/∂t]]2e + [[∂v/∂n]]2e ds
.
e
X X X ³ ·· ∂v
(4.6)
e
e∈Eh
.
XZ ³
e∈Eh
(4.7)
X X
|(∂wT /∂n)(me )|2 .
e
´
2
−1
2
h−3
e [[v]]e + he [[∂v/∂n]]e ds,
¸¸2
Z
X X ·· ∂v
X
(me ) .
h−1
[[∂v/∂n]]2e ds.
e
∂n
e
e
T ∈Th e∈ET
T ∈Th e∈ET
e∈Eh
The estimate (4.2) follows from (4.4)–(4.7). The estimate (4.3) in turn follows from (2.1),
(4.2), and an inverse estimate.
C OROLLARY 4.2. We have
X ¡
2
−2
2
h−4
T kv − Eh vkL2 (T ) + hT |v − Eh v|H 1 (T )
T ∈Th
¢
+ |v − Eh v|2H 2 (Ω,Th ) + |Eh v|2H 2 (Ω)
´
X X
X¡
¢2
2
h−2
[[v(p)]]
≤ C |v|2H 2 (Ω,Th ) +
Πe [[∂v/∂n]]e +
e
e ,
(4.8)
³
p∈Vh e∈Ep
e∈Eh
for all v ∈ Vh .
Proof. Let v ∈ Vh be arbitrary and v I be the piecewise linear polynomial such that vT and
v agrees at the vertices of T for all T ∈ Th . It follows from scaling, a standard interpolation
error estimate and the trace theorem that
I
T
XZ
e∈Eh
e
2
h−1
e [[∂v/∂n]]e ds
.
XZ
e
e∈Eh
(4.9)
.
XZ
e
e∈Eh
.
.
P
¡
Πe [[∂v /∂n]]e ds +
¡
−1
he
Πe [[∂v/∂n]]e ds +
X¡
¢2
Πe [[∂v/∂n]]e
Πe [[∂v/∂n]]e
+
e
XZ
e
e∈Eh
Z
X
hT
X
|v|2H 2 (T ) .
T ∈Th
+
XZ
e∈Eh
¢2
e∈Eh
T ∈Th
¢2
I
¢2
X¡
e∈Eh
The estimate for
h−1
e
−1
∂T
¡
I
2
h−1
e [[∂(v − v )/∂n]]e ds
I
2
h−1
e [[∂(v − v )/∂n]]e ds
¢2
∂(v − v I )/∂n ds
T ∈Th
2
h−4
T kv − Eh vkL2 (T ) follows from (3.6), (4.2) and (4.9). The rest of
ETNA
Kent State University
http://etna.math.kent.edu
222
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
the estimates then follow from inverse estimates and the triangle inequality.
C OROLLARY 4.3. We have
Z
X
−1
hT
(4.10)
|∇(v − Eh v)|2 ds
∂T
T ∈Th
³
. |v|2H 2 (Ω,Th ) +
X¡
Πe [[∂v/∂n]]e
e∈Eh
¢2
+
X X
2
h−2
e [[v(p)]]e
p∈Vh e∈Ep
´
for all v ∈ Vh .
Proof. From scaling, we have
X
h−1
T
Z
|∇(v − Eh v)|2 ds .
∂T
T ∈Th
X
2
h−4
T kv − Eh vkL2 (T ) ,
T ∈Th
which together with (4.8) implies (4.10).
The following result shows that Eh Ih can be treated as a quasi-interpolation operator.
L EMMA 4.4. Let ζ ∈ H s (Ω) for 2 ≤ s ≤ 3 and Ih ζ ∈ ṼhM be the Morley interpolant
of ζ. We have
(4.11) kζ − Eh Ih ζ||L2 (Ω) + h|ζ − Eh Ih ζ|H 1 (Ω) + h2 |ζ − Eh Ih ζ|H 2 (Ω) ≤ Chs |ζ|H s (Ω) .
Proof. Since ζ − Eh Ih ζ = 0 if ζ is a quadratic polynomial, the estimate (4.11) follows
from the Bramble-Hilbert lemma [6, 19] applied to element patches. (Details for similar
results can be found in [8]).
R EMARK 4.5. The construction of Eh and the derivation of its properties exploit the fact
that the Hsieh-Clough-Tocher element is a C 1 relative of the Morley element. Such enriching
operators appeared in the analysis of domain decomposition methods and multigrid methods
for nonconforming finite elements [7, 8] and in the a posteriori error analysis of a C 0 interior
penalty method for the biharmonic problem [11].
Next, we recall two estimates from [11, 22] that generalize the local efficiency estimates
in the a posteriori analysis. They are derived by the technique of bubble functions [2, 29].
L EMMA 4.6. Let u be the solution of (1.1). We have
X
(4.12)
T ∈Th
(4.13)
X
e∈Eh
he
¡
¢2
h4T kf k2L2 (T ) ≤ C |u − v|H 2 (Ω,Th ) + Osc(f, Th )
Z ··
e
∂2v
∂n2
¸¸2
e
¡
¢2
ds ≤ C |u − v|H 2 (Ω,Th ) + Osc(f, Th )
∀ v ∈ Vh ,
∀ v ∈ Vh ,
where
(4.14)
Osc(f, Th ) =
³ X
h4T kf − f¯k2L2 (T )
T ∈Th
´1/2
,
and f¯ is the piecewise constant function that takes the mean value of f on each T ∈ Th , i.e.,
¯
1
f¯¯T =
|T |
Z
T
f dx.
ETNA
Kent State University
http://etna.math.kent.edu
223
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
Finally, we observe that, by replacing v with u − v in (3.6) and (4.9), we have
(4.15)
X
h−3
e
e∈Eh
Z
e
Z
e
[[u − v]]2e ds
´
∀ v ∈ Vh ,
³
X¡
¢2 ´
≤ C |u − v|2H 2 (Ω,Th ) +
Πe [[∂(u − v)/∂n]]e
∀ v ∈ Vh .
≤ C |u −
X
h−3
e
e∈Eh
³
(4.16)
X
[[v]]2e ds =
h−1
e
e∈Eh
Z ··
e
v|2H 2 (Ω,Th )
+
X X
2
h−2
e [[(u − v)(p)]]e
p∈Vh e∈Ep
¸¸2
∂v
∂n
ds =
e
X
h−1
e
e∈Eh
Z ··
e
∂(u − v)
∂n
¸¸2
ds
e
e∈Eh
A standard inverse estimate and (4.16) immediately yield the following estimate:
(4.17)
X
he
Z ··
e
i
e∈Eh
∂2v
∂n∂t
¸¸2
e
³
X¡
¢2 ´
ds ≤ C |u − v|2H 2 (Ω,Th ) +
Πe [[∂(u − v)/∂n]]e
e∈Eh
for all v ∈ Vh .
5. A priori error analysis. We measure the error in the energy norm
(5.1)
p
ah (v, v)
´1/2
³
X X
X
2
2
.
h−4
h−2
= |v|2H 2 (Ω,Th ) +
e [[v(p)]]e
e (Πe [[∂v/∂n]]e ) +
kvkh =
p∈Vh e∈Ep
e∈Eh
Following the ideas in [22], we will show that the WOPSIP method is quasi-optimal in the
energy norm up to terms that are of order O(h), using only the weak problem (1.1) and the
tools developed in Section 4. Thus, the proof of the theorem below does not rely on any
elliptic regularity theory for the biharmonic problem.
T HEOREM 5.1. Let u and uh be the solution of (1.1) and (3.1) respectively. We have
(5.2)
ku − uh kh ≤ C
·
inf ku − vkh +
v∈Vh
³ X
2
hT |u|2H 2 (T )
T ∈Th
´1/2
¸
+ Osc(f, Th ) .
Proof. Let v ∈ Vh be arbitrary. First, by duality, we have
(5.3)
ku − uh kh ≤ ku − vkh + kv − uh kh ≤ ku − vkh +
ah (v − uh , w)
.
kwkh
w∈Vh \{0}
max
Next we write, using (1.1) and (3.1),
(5.4)
ah (v − uh , w) = ah (v, w) − (f, w)
= ah (v, w − Eh w) + ah (v, Eh w) − (f, w)
= ah (v, w − Eh w) − ah (u − v, Eh w) − (f, w − Eh w)
ETNA
Kent State University
http://etna.math.kent.edu
224
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
and record the obvious estimates
¯ X Z
¯
¯
¯
|ah (u − v, Eh w)| = ¯
D2 (u − v) : D2 (Eh w) dx¯
(5.5)
T ∈Th
(5.6)
T
≤ |u − v|H 2 (Ω,Th ) |Eh w|H 2 (Ω) . ku − vkh kwkh ,
´1/2
´1/2 ³ X
³ X
2
h−4
kw
−
E
wk
|(f, w − Eh w)| .
h4T kf k2L2 (T )
h
T
L2 (T )
T ∈Th
T ∈Th
³
´
. |u − v|H 2 (Ω,Th ) + Osc(f, Th ) kwkh
that follow immediately from (4.8), (4.12), and (5.1).
It remains to estimate the term ah (v, w − Eh w). We have
X Z
ah (v, w − Eh w) =
D2 v : D2 (w − Eh w) dx
T ∈Th
T
X
+
(5.7)
h−2
e (Πe [[∂v/∂n]]e )(Πe [[∂(w − Eh w)/∂n]]e )
e∈Eh
+
X X
h−4
e [[v(p)]]e [[(w − Eh w)(p)]]e .
p∈Vh e∈Ep
Using (5.1), the two last terms on the right-hand side of (5.7) can be easily estimated:
X
h−2
e (Πe [[∂v/∂n]]e )(Πe [[∂(w − Eh w)/∂n]]e )
e∈Eh
+
X X
h−4
e [[v(p)]]e [[(w − Eh w)(p)]]e
p∈Vh e∈Ep
=
(5.8)
X
h−2
e (Πe [[∂(v − u)/∂n]]e )(Πe [[∂w/∂n]]e )
e∈Eh
+
X X
h−4
e [[(v − u)(p)]]e [[w(p)]]e
p∈Vh e∈Ep
≤ ku − vkh kwkh .
For the first term on the right-hand side of (5.7), we find from integration by parts that
X Z
D2 v : D2 (w − Eh w) dx
T ∈Th
T
=−
(5.9)
X Z ½½ ∂ 2 v ¾¾ ·· ∂(w − Eh w) ¸¸
ds
∂n2 e
∂n
e
e∈Eh e
¾
X Z ·· ∂ 2 v ¸¸ ½½ ∂(w − Eh w) ¾
ds
−
2
∂n
e ∂n
e
e
i
e∈Eh
½ 2 ¾¾ ··
¸¸
XZ ½
∂ v
∂(w − Eh w)
−
ds
∂n∂t e
∂t
e
e∈Eh e
½
¾¾
X Z ·· ∂ 2 v ¸¸ ½
∂(w − Eh w)
−
ds
∂t
e ∂n∂t e
e
i
e∈Eh
= S1 + S2 + S3 + S4 ,
ETNA
Kent State University
http://etna.math.kent.edu
225
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
and we can estimate the four sums as follows.
From direct calculations, scaling, and (5.1), we have
(5.10)
··
¸¸
X Z ½½ ∂ 2 v ¾¾
∂w
ds
Πe
S1 = −
∂n2 e
∂n e
e∈Eh e
½½ 2 ¾
··
¸¸
¾
X
∂ v
∂w
he
=−
Πe
∂n2 e
∂n e
e∈Eh
¾
¾
½
½
2
³ ·· ∂w ¸¸ ´2 ´1/2
´1/2 ³ X
³X
∂2v
−2
4
he Πe
≤
he
∂n2 e
∂n e
e∈Eh
e∈Eh
´1/2
³ X
.
h2T |v|2H 2 (T )
kwkh
T ∈Th
.
³ X
T ∈Th
£
¤´1/2
h2T |u − v|2H 2 (T ) + |u|2H 2 (T )
kwkh ,
and
X Z ½½ ∂ 2 v ¾¾ ·· ∂w ¸¸
ds
∂n∂t e ∂t e
e∈Eh e
¾
½
½ 2 ¾
X
X
∂ v
2
h−2
|[[w(p)]]e |
he
≤
e
∂n∂t e
p∈Ve
e∈Eh
½½ 2 ¾¾2 ´ ³ X
´1/2
³X
X
1/2
∂ v
2h−4
≤
h4e
[[w(p)]]2e
e
∂n∂t e
p∈Ve
e∈Eh
e∈Eh
´1/2
³ X
kwkh
h2T |v|2H 2 (T )
.
S3 = −
(5.11)
T ∈Th
.
³ X
T ∈Th
£
¤´1/2
h2T |u − v|2H 2 (T ) + |u|2H 2 (T )
kwkh .
From Corollary 4.3, (4.13), (4.17), and (5.1), we have
(5.12)
S2 ≤
³X
he
Z ··
e
e∈Eh
∂2v
∂n2
¸¸2
ds
e
´1/2 ³ X
h−1
e
e∈Eh
Z ½½
e
∂(w − Eh w)
∂n
¾¾2
ds
e
´1/2
¡
¢
. |u − v|H 2 (Ω,Th ) + Osc(f, Th ) kwkh ,
and
(5.13)
S4 ≤
³X
e∈Eh
he
Z ··
e
∂2v
∂n∂t
. ku − vkh kwkh .
¸¸2
e
ds
´1/2 ³ X
e∈Eh
h−1
e
Z ½½
e
∂(w − Eh w)
∂t
¾¾2
e
ds
´1/2
ETNA
Kent State University
http://etna.math.kent.edu
226
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
It follows from (5.9)–(5.13) that
X Z
D2 v : D2 (w − Eh w) dx
T ∈Th
T
·
¸
´1/2
³ X
h2T |u|2H 2 (T )
. ku − vkh +
+ Osc(f, Th ) kwkh ,
T ∈Th
which together with (5.4)–(5.8) implies
·
¸
´1/2
³ X
ah (v − uh , w)
max
. ku − vkh +
h2T |u|2H 2 (T )
+ Osc(f, Th )
kwkh
w∈Vh \{0}
T ∈Th
and, in view of (5.3), the estimate (5.2).
We now invoke the elliptic regularity theory for nonsmooth domains [5, 17, 20, 21] to
obtain a concrete error estimate. According to the regularity theory there exists a number
α ∈ (1/2, 1] such that the solution of (1.1) satisfies
kukH 2+α (Ω) ≤ CΩ kf kH −2+α (Ω)
(5.14)
when the right-hand side f ∈ H −2+α (Ω) (←֓ L2 (Ω)). We shall refer to α as the index of
elliptic regularity for the biharmonic problem.
T HEOREM 5.2. Let α be the index of elliptic regularity for the biharmonic problem. We
have
ku − uh kh ≤ Chα kf kL2 (Ω) .
(5.15)
Proof. Let Ih u be the Morley interpolant of u. From (2.5), (4.14), (5.2), and (5.14), we
deduce
³
X
£
¤´
h4T |u|2H 2 (T ) + kf − f¯k2L2 (T )
ku − uh k2h ≤ C ku − Ih uk2h +
T ∈Th
¡
≤C h
2α
|u|2H 2+α (Ω)
¢
+ h4 |u|2H 2 (Ω) + h4 kf k2L2 (Ω) ≤ Ch2α kf k2L2 (Ω) .
6. A posteriori error analysis. We will use the following residual-based error estimator
in our analysis:
ηh =
(6.1)
4
³X
j=0
ηj2
´1/2
,
where
´1/2
³ X
h4T kf k2L2 (T )
³X
h−3
e
Z
[[uh ]]2e ds
³X
h−1
e
Z
[[∂uh /∂n]]2e ds
η3 =
³X
¡
¢2 ´1/2
Πe [[∂uh /∂n]]e
,
h−2
e
η4 =
³ X X
η0 =
T ∈Th
η1 =
e∈Eh
η2 =
e∈Eh
e∈Eh
e
p∈Vh e∈Ep
e
,
´1/2
2
h−4
e [[uh (p)]]e
,
´1/2
´1/2
.
,
ETNA
Kent State University
http://etna.math.kent.edu
227
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
T HEOREM 6.1. Let u and uh be the solution of (1.1) and (3.1) respectively. We have
ku − uh kh ≤ Cηh .
(6.2)
Proof. From the definition (5.1), we see that
ku − uh k2h = |u − uh |2H 2 (Ω,Th ) + η32 + η42 .
(6.3)
Furthermore we have, from Lemma 4.1,
(6.4)
|u − uh |H 2 (Ω,Th ) ≤ |u − Eh uh |H 2 (Ω) + |Eh uh − uh |H 2 (Ω,Th )
. |u − Eh uh |H 2 (Ω) + η1 + η2 ,
and by duality,
(6.5)
|u − Eh uh |H 2 (Ω) =
max
φ∈H02 (Ω)
a(u − Eh uh , φ)
.
|φ|H 2 (Ω)
Let φ ∈ H02 (Ω) be arbitrary. We write, using (1.1) and (3.1),
(6.6)
a(u − Eh uh , φ) = (f, φ) − ah (uh , φ) + ah (uh − Eh uh , φ)
= (f, φ − Ih φ) − ah (uh , φ − Ih φ) + ah (uh − Eh uh , φ).
From (2.4), (2.5), (3.2), and Lemma 4.1, we find
X Z
ah (uh , φ − Ih φ) =
D2 uh : D2 (φ − Ih φ) dx = 0
T
T ∈Th
(f, φ − Ih φ) ≤
X
kf kL2 (T ) kφ − Ih φkL2 (T )
T ∈Th
≤
³ X
h4T kf k2L2 (T )
´1/2 ³ X
2
h−4
T kφ − Ih φkL2 (T )
T ∈Th
T ∈Th
´1/2
. η0 |φ|H 2 (Ω) ,
X Z
ah (uh − Eh uh , φ) =
D2 (uh − Eh uh ) : D2 φ dx
T ∈Th
T
≤ |uh − Eh uh |H 2 (Ω,Th ) |φ|H 2 (Ω) . (η1 + η2 )|φ|H 2 (Ω) ,
which together with (6.5)–(6.6) implies
(6.7)
|u − Eh uh |H 2 (Ω,Th ) . η0 + η1 + η2 .
The estimate (6.2) follows from (6.1), (6.3)–(6.4), and (6.7).
Theorem 6.1 shows that ηh is a reliable error estimator. The next theorem, which states
that ηh is also an efficient error estimator, follows immediately from (4.12), (4.15), (4.16),
(5.1), and (6.1).
T HEOREM 6.2. Let u and uh be the solution of (1.1) and (3.1) respectively. We have
¡
¢
ηh ≤ C ku − uh kh + Osc(f, Th ) .
ETNA
Kent State University
http://etna.math.kent.edu
228
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
7. Extensions. Let uh ∈ Vh be the solution of (3.1). We can view Eh uh ∈ VhHCT as a
C solution of (1.1) obtained by post-processing.
T HEOREM 7.1. The following error estimate holds for the post-processed solution
Eh u h :
1
|u − Eh uh |H 2 (Ω) ≤ Chα kf kL2 (Ω) .
Proof. This is a direct consequence of (2.5), (4.8), (4.11), (5.14), and (5.15).
|u − Eh uh |H 2 (Ω) ≤ |u − Eh Ih u|H 2 (Ω) + |Eh (Ih u − uh )|H 2 (Ω)
. |u − Eh Ih u|H 2 (Ω) + kIh u − uh kh
. |u − Eh Ih u|H 2 (Ω) + kIh u − ukh + ku − uh kh
. hα kf kL2 (Ω)
Following the ideas in [8], we can also derive other error estimates for Eh uh . The key is
to understand the adjoint operator Eh∗ : H02 (Ω) −→ Vh defined by
ah (Eh∗ φ, v) = a(φ, Eh v)
(7.1)
∀ φ ∈ H02 (Ω), v ∈ Vh .
R EMARK 7.2. It follows from (1.1) and (7.1) that Eh∗ u ∈ Vh satisfies
ah (Eh∗ u, v) = (f, Eh v)
∀ v ∈ Vh .
Therefore Eh∗ u is the solution of a modified version of the WOPSIP method that can be
applied to (1.1) for a general right-hand side f ∈ H −s (Ω), where −2 ≤ s ≤ 0.
We begin with a technical lemma.
L EMMA 7.3. Let α be the index of elliptic regularity for the biharmonic problem. We
have
¯ X Z
¯
¯
¯
D2 ζ : D2 (w − Eh w) dx¯ ≤ Chα kζkH 2+α (Ω) kwkh ,
(7.2)
¯
T ∈Th
(7.3)
T
¯
¯ X Z
¯
¯
D2 ζ : D2 (Ih φ − Eh Ih φ) dx¯ ≤ Ch2α kζkH 2+α (Ω) kφkH 2+α (Ω) ,
¯
T ∈Th
T
for all ζ ∈ H 2+α (Ω), w ∈ Vh and φ ∈ H 2+α (Ω) ∩ H02 (Ω).
Proof. Let w ∈ Vh be arbitrary. We have, by Corollary 4.2 and (5.1),
¯ X Z
¯
¯
¯
D2 ζ : D2 (w − Eh w) dx¯ ≤ |ζ|H 2 (Ω) |w − Eh w|H 2 (Ω,Th )
(7.4)
¯
T ∈Th
T
≤ C|ζ|H 2 (Ω) kwkh
∀ ζ ∈ H 2 (Ω).
For ζ ∈ H 3 (Ω), it follows from integration by parts that
X Z
D2 ζ : D2 (w − Eh w) dx
T ∈Th
(7.5)
T
X Z ∂ 2 ζ ·· ∂w ¸¸
ds
=−
∇(∆ζ) · ∇(w − Eh w) dx −
∂n2e ∂n e
T ∈Th T
e∈Eh e
X Z ∂ 2 ζ ·· ∂w ¸¸
−
ds,
∂t e
e ∂ne ∂te
X Z
e∈Eh
ETNA
Kent State University
http://etna.math.kent.edu
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
229
and the three terms on the right-hand side can be estimated as follows.
We apply Corollary 4.2 and (5.1) to bound the first term:
(7.6)
¯ X Z
¯
¯
¯
∇(∆ζ) · ∇(w − Eh w) dx¯ ≤ |ζ|H 3 (Ω) |w − Eh w|H 1 (Ω,Th )
¯
T ∈Th
T
≤ Ch|ζ|H 3 (Ω) kwkh .
For the second term, we write
X Z ∂ 2 ζ ·· ∂w ¸¸
ds
−
∂n2e ∂n e
e∈Eh e
··
¸¸
´ ·· ∂w ¸¸
XZ
X Z ³ ∂2ζ
∂w
ds
−
ω
Π
ds,
−
ω
=−
e
e
e
2
∂n e
∂n e
e
e ∂ne
e∈Eh
e∈Eh
where
1
ωe =
|T |
Z
T
∂2ζ
dx
∂n2e
is the mean value of ∂ 2 ζ/∂n2e over a triangle T ∈ Te . We then find by using (4.9), (5.1), the
trace theorem, and a standard interpolation error estimate that
¯
¯ X Z ∂ 2 ζ ·· ∂w ¸¸
¯
¯
ds
¯
¯
2
∂n e
e ∂ne
e∈Eh
(7.7)
. h|ζ|H 3 (Ω)
³X
h−1
e
e∈Eh
. h|ζ|H 3 (Ω) kwkh +
Z ··
e
³X
∂w
∂n
¸¸2
h4e ωe2
e
ds
´1/2
+
´1/2 ³ X
e∈Eh
e∈Eh
X
he |ωe | · |Πe [[∂w/∂n]]e |
e∈Eh
£
¤2 ´1/2
Πe [[∂w/∂n]]e
h−2
e
. h|ζ|H 3 (Ω) kwkh + h|ζ|H 2 (Ω) kwkh . hkζkH 3 (Ω) kwkh .
For the third term, we write
¸¸
··
∂2ζ
∂w
−
ds
∂ne ∂te ∂t e
e∈Eh e
··
¸¸
´ ·· ∂w ¸¸
XZ
X Z ³ ∂2ζ
∂w
ds −
τe
ds,
− τe
=−
∂t e
∂t e
e
e ∂ne ∂te
XZ
e∈Eh
e∈Eh
where
τe =
1
|T |
Z
T
∂2ζ
dx
∂ne ∂te
is the mean value of ∂ 2 ζ/∂ne ∂te over a triangle T ∈ Te . We then obtain by using (3.6), (5.1),
ETNA
Kent State University
http://etna.math.kent.edu
230
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
the trace theorem, and standard interpolation error and inverse estimates that
¯
¯ X Z ∂ 2 ζ ·· ∂w ¸¸
¯
¯
ds¯
¯
∂n
∂t
∂t
e e
e
e∈Eh e
¸¸2 ´
Z ··
³X
X¯
X
1/2
¯
∂w
¯[[w(p)]]e ¯
ds
|τe |
. h|ζ|H 3 (Ω)
h−1
+
e
∂t e
e
p∈Ve
e∈Eh
e∈Eh
Z
³X
´1/2
h−3
. h|ζ|H 3 (Ω)
[[w]]2e ds
(7.8)
e
e∈Eh
+
³X
h4e τe2
e
´1/2 ³ X
e∈Eh
e∈Eh
h−4
e
X
[[w(p)]]2e
p∈Ve
´1/2
. h|ζ|H 3 (Ω) ||wkh + h|ζ|H 2 (Ω) ||wkh . hkζkH 3 (Ω) ||wkh .
Combining (7.5)–(7.8), we have
¯
¯ X Z
¯
¯
D2 ζ : D2 (w − Eh w) dx¯ ≤ ChkζkH 3 (Ω) kwkh
(7.9)
¯
T ∈Th
∀ ζ ∈ H 3 (Ω).
T
The estimate (7.2) follows from (7.4), (7.9), and interpolation between Sobolev spaces [1, 4,
27, 28].
Next, we derive (7.3) by a similar approach. Let φ ∈ H 2+α (Ω) ∩ H02 (Ω) be arbitrary.
We have, by (2.5) and (4.11),
¯ X Z
¯
¯
¯
D2 ζ : D2 (Ih φ − Eh Ih φ) dx¯
¯
T ∈Th
(7.10)
T
≤ |ζ|H 2 (Ω) |Ih φ − Eh Ih φ|H 2 (Ω,Th )
¡
¢
≤ |ζ|H 2 (Ω) |Ih φ − φ|H 2 (Ω,Th ) + |φ − Eh Ih φ|H 2 (Ω)
≤ Chα |ζ|H 2 (Ω) kφkH 2+α (Ω)
∀ ζ ∈ H 2 (Ω).
For ζ ∈ H 3 (Ω), it follows from integration by parts that
X Z
D2 ζ : D2 (Ih φ − Eh Ih φ) dx
T ∈Th
T
=−
X Z
T ∈Th
(7.11)
∇(∆ζ) · ∇(Ih φ − Eh Ih φ) dx
T
¸¸
··
X Z ³ ∂ 2 ζ ·· ∂Ih φ ¸¸
∂2ζ
∂Ih φ ´
ds
+
−
∂n2e
∂n e ∂ne ∂te
∂t e
e∈Eh e
X Z
∇(∆ζ) · ∇(Ih φ − Eh Ih φ) dx
=−
T ∈Th
T
´ ·· ∂(I φ − φ) ¸¸
X Z ³ ∂2ζ
h
ds
− ωe
−
∂n2e
∂n
e
e
e∈Eh
´ ·· ∂(I φ − φ) ¸¸
X Z ³ ∂2ζ
h
−
ds.
− τe
∂t
e ∂ne ∂te
e
e∈Eh
ETNA
Kent State University
http://etna.math.kent.edu
231
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
Using (2.5), (4.11), the trace theorem, and a standard interpolation error estimate, we obtain
from (7.11)
¯ X Z
¯
¯
¯
D2 ζ : D2 (Ih φ − Eh Ih φ) dx¯
(7.12)
¯
T ∈Th
T
≤ Ch1+α |ζ|H 3 (Ω) kφkH 2+α (Ω)
∀ ζ ∈ H 3 (Ω).
The estimate (7.3) now follows from (7.10), (7.12), and interpolation between Sobolev spaces.
We are now ready to establish the properties of Eh∗ .
L EMMA 7.4. Let α be the index of elliptic regularity for the biharmonic problem. We
have
(7.13)
kζ − Eh∗ ζkh ≤ Chα kζkH 2+α (Ω)
∀ ζ ∈ H 2+α (Ω) ∩ H02 (Ω).
Proof. We have the following standard estimate for nonconforming methods:
kζ − Eh∗ ζkh ≤ kζ − vkh + kv − Eh∗ ζkh
≤ kζ − vkh +
(7.14)
ah (v − Eh∗ ζ, w)
kwkh
w∈Vh \{0}
≤ 2kζ − vkh +
sup
ah (ζ − Eh∗ ζ, w)
kwkh
w∈Vh \{0}
sup
∀ v ∈ Vh .
Let w ∈ Vh be arbitrary. Since ζ ∈ H02 (Ω), we have
ah (ζ − Eh∗ ζ, w) = ah (ζ, w − Eh w) =
X Z
T ∈Th
D2 ζ : D2 (w − Eh w) dx.
T
It then follows from (7.2) that
ah (ζ − Eh∗ ζ, w) ≤ Chα kζkH 2+α (Ω) kwkh ,
which implies
ah (ζ − Eh∗ ζ, w)
≤ Chα kζkH 2+α (Ω) .
kwkh
w∈Vh \{0}
sup
Finally, by taking v = Ih ζ, we obtain from (2.5)
(7.15)
kζ − vkh = kζ − Ih ζkh = |ζ − Ih ζ|H 2 (Ω,Th ) ≤ Chα kζkH 2+α (Ω) .
The estimate (7.13) follows from (7.14)–(7.15).
L EMMA 7.5. Let α be the index of elliptic regularity for the biharmonic problem. We
have
|ah (ζ − Eh∗ ζ, Ih φ)| ≤ Ch2α kζkH 2+α (Ω) kφkH 2+α (Ω)
for all ζ, φ ∈ H 2+α (Ω) ∩ H02 (Ω).
Proof. In view of the fact that
ah (ζ − Eh∗ ζ, Ih φ) = ah (ζ, Ih φ − Eh Ih φ) =
X Z
T ∈Th
T
D2 ζ : D2 (Ih φ − Eh Ih φ) dx,
ETNA
Kent State University
http://etna.math.kent.edu
232
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
the estimate follows immediately from (7.3).
Next, we will derive error estimates in the norm of the Sobolev space H 2−α (Ω). The
following duality formula is useful:
(7.16)
kψkH 2−α (Ω) =
max
φ∈H −2+α (Ω)\{0}
φ(ψ)
kφkH −2+α (Ω)
∀ ψ ∈ H02−α (Ω).
Given any φ ∈ H −2+α (Ω), let ξ ∈ H02 (Ω) satisfy
(7.17)
a(ξ, v) = φ(v)
∀ v ∈ H02 (Ω).
Then elliptic regularity (cf. (5.14)) implies
(7.18)
kξkH 2+α (Ω) ≤ CΩ kφkH −2+α (Ω) .
L EMMA 7.6. Let α be the index of elliptic regularity for the biharmonic problem. We
have
(7.19)
kζ − Eh (Eh∗ ζ)kH 2−α (Ω) ≤ Ch2α kζkH 2+α (Ω)
∀ ζ ∈ H 2+α (Ω) ∩ H02 (Ω).
Proof. Let φ ∈ H −2+α (Ω) be arbitrary and ξ ∈ H02 (Ω) satisfy (7.17). It follows from
(2.5), (7.1), Lemma 7.4, Lemma 7.5, and (7.18) that
φ(ζ − Eh Eh∗ ζ) = a(ξ, ζ − Eh Eh∗ ζ)
= a(ξ, ζ) − ah (Eh∗ ξ, Eh∗ ζ)
= ah (ξ − Eh∗ ξ, ζ) + ah (Eh∗ ξ, ζ − Eh∗ ζ)
= ah (ξ − Eh∗ ξ, ζ) + ah (ξ, ζ − Eh∗ ζ) − ah (ξ − Eh∗ ξ, ζ − Eh∗ ζ)
= ah (ξ − Eh∗ ξ, Ih ζ) + ah (ξ − Eh∗ ξ, ζ − Ih ζ)
+ ah (Ih ξ, ζ − Eh∗ ζ) + ah (ξ − Ih ξ, ζ − Eh∗ ζ)
− ah (ξ − Eh∗ ξ, ζ − Eh∗ ζ)
. h2α kζkH 2+α (Ω) kφkH −2+α (Ω) ,
which together with (7.16) implies (7.19).
T HEOREM 7.7. The following error estimate holds for the post-processed solution
Eh u h :
ku − Eh uh kH 2−α (Ω) ≤ Ch2α kf kL2 (Ω) ,
where α is the index of elliptic regularity for the biharmonic problem.
Proof. Let φ ∈ H −2+α (Ω) be arbitrary and ξ ∈ H02 (Ω) satisfy (7.17). It follows from
(1.1), (2.5), (3.1), (4.11), (5.14), (5.15), (7.1), Lemma 7.4, and (7.18) that
φ(Eh (uh − Eh∗ u)) = a(ξ, Eh (uh − Eh∗ u))
= ah (Eh∗ ξ − Ih ξ, uh − Eh∗ u) + ah (Ih ξ, uh − Eh∗ u)
= ah (Eh∗ ξ − Ih ξ, uh − Eh∗ u) + ah (Ih ξ, uh ) − a(Eh Ih ξ, u)
= ah (Eh∗ ξ − Ih ξ, uh − Eh∗ u) + (f, Ih ξ − Eh Ih ξ)
. h2α kξkH 2+α (Ω) kf kL2 (Ω) + h2+α kξkH 2+α (Ω) kf kL2 (Ω)
. h2α kφkH −2+α (Ω) kf kL2 (Ω) ,
ETNA
Kent State University
http://etna.math.kent.edu
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
233
which together with (7.16) implies
kEh (uh − Eh∗ u)kH 2−α (Ω) ≤ Ch2α kf kL2 (Ω) ,
and hence, in view of (5.14) and Lemma 7.6,
ku − Eh uh kH 2−α (Ω) ≤ ku − Eh Eh∗ ukH 2−α (Ω) + kEh (uh − Eh∗ u)kH 2−α (Ω)
≤ Ch2α kf kL2 (Ω) .
The following corollary is immediate.
C OROLLARY 7.8. Let α be the index of elliptic regularity for the biharmonic problem.
The following error estimate holds for the post-processed solution Eh u :
ku − Eh uh kL2 (Ω) ≤ Ch2α kf kL2 (Ω) .
R EMARK 7.9. Since α = 1 when Ω is convex, we have
(7.20)
ku − Eh ukL2 (Ω) ≤ ku − Eh ukH 1 (Ω) ≤ Ch2 kf kL2 (Ω)
for a convex domain Ω.
R EMARK 7.10. We see from Theorem 7.1, Theorem 7.7, and Corollary 7.8 that the
post-processed solution Eh uh satisfies all the correct error estimates. Therefore the WOPSIP
method is also relevant for computing C 1 solutions of (1.1).
We can now establish an L2 error estimate for the solution uh of (3.1).
C OROLLARY 7.11. Let α be the index of elliptic regularity for the biharmonic problem.
We have
ku − uh kL2 (Ω) ≤ Ch2α kf kL2 (Ω) .
Proof. Using Corollary 4.2, (5.1), Theorem 5.2, and Theorem 7.7, we find
ku − uh kL2 (Ω) ≤ ku − Eh uh kL2 (Ω) + kuh − Eh uh kL2 (Ω)
. h2α kf kL2 (Ω) + h2 kuh kh
£
¤
. h2α kf kL2 (Ω) + h2 ku − uh kh + |u|H 2 (Ω)
. h2α kf kL2 (Ω) .
Finally, we have a convergence theorem for the modified WOPSIP method (Remark 7.2)
when the right-hand side f is in H −2+α (Ω).
T HEOREM 7.12. The following error estimates hold for the modified WOPSIP method:
(7.21)
ku − Eh∗ ukh ≤ Chα kf kH −2+α (Ω) ,
(7.22)
ku − Eh Eh∗ ukH 2−α (Ω) ≤ Ch2α kf kH −2+α (Ω) ,
(7.23)
ku − Eh∗ ukL2 (Ω) ≤ Ch2α kf kH −2+α (Ω) ,
where α is the index of elliptic regularity for the biharmonic problem.
Proof. The estimates (7.21) and (7.22) follow directly from (5.14), Lemma 7.4, and
Lemma 7.6. Together with Corollary 4.2, these estimates imply (7.23):
ku − Eh∗ ukL2 (Ω) ≤ ku − Eh Eh∗ ukL2 (Ω) + kEh Eh∗ u − Eh∗ ukL2 (Ω)
. ku − Eh Eh∗ ukH 2−α (Ω) + h2 kEh∗ ukh
¡
¢
. h2α kukH 2+α (Ω) + h2 kEh∗ u − ukh + |u|H 2 (Ω)
. h2α kf ||H −2+α (Ω) .
ETNA
Kent State University
http://etna.math.kent.edu
234
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
8. Numerical results. In this section we report the results of several numerical experiments. For the first set of numerical experiments, we take Ω to be the unit square (0, 1)×(0, 1)
and the exact solution of (1.1) to be
u(x, y) = 100x2 (1 − x)2 y 2 (1 − y)2 .
We compute the solution uh of (3.1) on several uniform grids with mesh sizes h = 1/2i for
i = 1, 2, · · · 5. The errors in the energy norm and the L2 norm together with their orders of
convergence are presented in Table 8.1. These numerical results clearly match the theoretical
results in Theorem 5.2 and Corollary 7.11.
TABLE 8.1
Errors and orders of convergence for the WOPSIP method.
h
ku − uh kh
Order
ku − uh kL2 (Ω)
Order
1/2
1/4
1/8
1/16
1/32
17.197247559437201
7.101544418782296
3.201633853279419
1.537650668307142
0.758213520169036
–
1.2759
1.1493
1.0580
1.0200
1.716371062750962
0.277965054420832
0.058037854904340
0.013567912004911
0.003314694892577
–
2.6263
2.2598
2.0967
2.0332
For comparison, we compute the solutions of the Morley nonconforming method on the
same grids and tabulate the errors and their orders of convergence in Table 8.2. It is evident
that the magnitudes of the errors of these two methods are similar.
TABLE 8.2
Errors and order of convergence for the Morley nonconforming method.
h
ku − uh kh
order
ku − uh kL2 (Ω)
order
1/2
1/4
1/8
1/16
1/32
6.977229062890963
4.774226099723017
2.628590625177154
1.354472363700791
0.682957077321058
–
0.5474
0.8610
0.9566
0.9879
0.323439329204391
0.141179892106251
0.041796714441572
0.011013849766270
0.002795365814910
–
1.1960
1.7561
1.9241
1.9782
We also compute the post-processed solution Eh uh and present the L2 error and the order
of convergence in Table 8.3. These numerical results match the theoretical estimate (7.20).
Table 8.4 contains the condition number of the preconditioned system Bh−1 Ah and its order
TABLE 8.3
Error and order of convergence for the post-processed solution.
h
ku − Eh uh kL2 (Ω)
Order
1/2
1/4
1/8
1/16
1/32
1.695407290104347
0.276528870979329
0.058428415656511
0.013603479656276
0.003317111091565
–
2.6161
2.2427
2.1027
2.0360
of growth (in terms of h−1 ). The order of growth is clearly 4, as predicted by Lemma 3.5.
For the¡ second set of ¢numerical experiments we take Ω to be the L-shaped domain
(−1, 1)2 \ [0, 1) × (−1, 0] , and consider the model problem (1.1) on Ω with the following
singular solution [21, p.107]:
u(r, θ) = (r2 cos2 θ − 1)2 (r2 sin2 θ − 1)2 r(1+z) g(θ),
ETNA
Kent State University
http://etna.math.kent.edu
235
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
TABLE 8.4
Condition numbers of the preconditioned system and orders of growth.
h
Condition number of Bh−1 Ah
Order of growth
1/2
1/4
1/8
1/16
1/32
2.127683603246884e+001
4.501699323404198e+001
2.910422778240135e+002
3.526267672393217e+003
5.927291290250981e+004
–
1.0812
2.6927
3.5988
4.0712
where z = 0.544483736782464 is a noncharacteristic root of sin2 (zω) = z 2 sin2 (ω) with
ω = 3π
2 ,
·
¸
1
1
g(θ) =
sin ((z − 1)ω) −
sin ((z + 1)ω)
z−1
z+1
× [cos((z − 1)θ) − cos((z + 1)θ)]
¸
·
1
1
sin((z − 1)θ) −
sin((z + 1)θ)
−
z−1
z+1
× [cos ((z − 1)ω) − cos ((z + 1)ω)] ,
and (r, θ) are the polar coordinates. We compute the discrete solution uk on a sequence of
adaptive meshes Tk generated by bisecting the marked triangles and edges of Tk−1 , where
the triangles and edges are marked according to the bulk criteria of Dörfler [18]. The error
estimator captures the singularities of the solution throughout the mesh refinement process;
cf. Figure 8.1.
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
−1
−0.5
0
0.5
1
F IGURE 8.1. Adaptive mesh after 30 refinement steps.
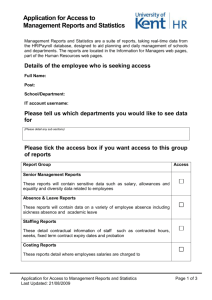
The energy error and the error estimator are plotted against the number of dofs in the loglog plot in Figure 8.2, which demonstrates that the error estimator is reliable (Theorem 6.1)
and that the performance of the adaptive algorithm is optimal.
ETNA
Kent State University
http://etna.math.kent.edu
236
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
2
10
Estimator
Error
Optimal
Error and Estimator
1
10
0
10
−1
10
2
3
10
4
10
10
Degrees of freedom
5
6
10
10
F IGURE 8.2. Error and estimator for the problem on the L-shaped domain.
The efficiency index given by ηh /ku − uh kh is computed as a function of the number of
dofs and then plotted in Figure 8.3, which shows that the error estimator is efficient (Theorem 6.2).
1.9
1.8
1.7
Efficiency Index
1.6
1.5
1.4
1.3
1.2
1.1
1
2
10
3
10
4
10
Degrees of freedom
5
10
6
10
F IGURE 8.3. Efficiency of the error estimator for the problem on the L-shaped domain.
ETNA
Kent State University
http://etna.math.kent.edu
PENALTY METHOD FOR THE BIHARMONIC PROBLEM
237
9. Concluding remarks. Even though the number of dofs of the WOPSIP method is
three times the number of dofs of the classical Morley nonconforming method, the intrinsic
parallelism of the WOPSIP method can potentially be exploited to result in a much faster
algorithm. As a first step, we have shown in this paper that the performance of the WOPSIP
method is similar to the performance of the Morley method in terms of the magnitudes of the
discretization errors, and that reliable and efficient error estimators are available for adaptive
solvers.
The WOPSIP method developed in this paper can be applied to general fourth order
problems. It can also be applied to a fourth order singular perturbation problem of the
form ǫ2 ∆2 u − ∆u = f , provided the second order term is correctly discretized as in [30].
The WOPSIP approach can also be used to construct an intrinsically parallel version of the
Nilssen-Tai-Winther finite element method [24] that is designed to handle fourth order singular perturbation problems. Research in this direction will be reported elsewhere.
REFERENCES
[1] R. A DAMS AND J. F OURNIER, Sobolev Spaces, second ed., Academic Press, New York, 2003.
[2] M. A INSWORTH AND J. T. O DEN, A Posteriori Error Estimation in Finite Element Analysis, WileyInterscience, New York, 2000.
[3] J. A RGYRIS , I. F RIED , AND D. S CHARPF, The TUBA family of plate elements for the matrix displacement
method, Aeronaut J., 72 (1968), pp. 701–709.
[4] J. B ERGH AND J. L ÖFSTR ÖM, Interpolation Spaces, Springer, Berlin, 1976.
[5] H. B LUM AND R. R ANNACHER, On the boundary value problem of the biharmonic operator on domains
with angular corners, Math. Methods Appl. Sci., 2 (1980), pp. 556–581.
[6] J. B RAMBLE AND S. H ILBERT, Estimation of linear functionals on Sobolev spaces with applications to
Fourier transforms and spline interpolation, SIAM J. Numer. Anal., 7 (1970), pp. 113–124.
[7] S. B RENNER, Two-level additive Schwarz preconditioners for nonconforming finite element methods, Math.
Comp., 65 (1996), pp. 897–921.
, Convergence of nonconforming multigrid methods without full elliptic regularity, Math. Comp., 68
[8]
(1999), pp. 25–53.
[9] S. B RENNER , T. G UDI , L. OWENS , AND L.-Y. S UNG, An intrinsically parallel finite element method, J. Sci.
Comput., 40 (2009), pp. 27–50.
[10] S. B RENNER , T. G UDI , AND L.-Y. S UNG, A posteriori error control for a weakly over-penalized symmetric
interior penalty method, J. Sci. Comput., 40 (2009), pp. 37–50.
[11]
, An a posteriori error estimator for a quadratic C 0 interior penalty method for the biharmonic problem, IMA J. Numer. Anal., 30 (2010), pp. 777–798.
[12] S. B RENNER , L. OWENS , AND L.-Y. S UNG, A weakly over-penalized symmetric interior penalty method, Electron. Trans. Numer. Anal., 30 (2008), pp. 107–127,
http://etna.mcs.kent.edu/vol.30.2008/pp107-127.dir.
[13] S. B RENNER AND L. S COTT, The Mathematical Theory of Finite Element Methods, third ed., Springer,
New York, 2008.
[14] S. B RENNER , K. WANG , AND J. Z HAO, Poincaré-Friedrichs inequalities for piecewise H 2 functions, Numer.
Funct. Anal. Optim., 25 (2004), pp. 463–478.
[15] P. C IARLET, Sur l’élément de Clough et Tocher, RAIRO Anal. Numér., 8 (1974), pp. 19–27.
[16]
, The Finite Element Method for Elliptic Problems, North-Holland, Amsterdam, 1978.
[17] M. DAUGE, Elliptic Boundary Value Problems on Corner Domains, Lecture Notes in Mathematics 1341,
Springer, Berlin-Heidelberg, 1988.
[18] W. D ÖRFLER, A convergent adaptive algorithm for Poisson’s equation, SIAM J. Numer. Anal., 33 (1996),
pp. 1106–1124.
[19] T. D UPONT AND R. S COTT, Polynomial approximation of functions in Sobolev spaces, Math. Comp., 34
(1980), pp. 441–463.
[20] P. G RISVARD, Elliptic Problems in Non Smooth Domains, Pitman, Boston, 1985.
[21]
, Singularities in Boundary Value Problems, Masson, Paris, 1992.
[22] T. G UDI, A new error analysis for discontinuous finite element methods for linear elliptic problems, Math.
Comp., 79 (2010), pp. 2169–2189.
[23] L. M ORLEY, The triangular equilibrium problem in the solution of plate bending problems, Aeronaut. Q., 19
(1968), pp. 149–169.
ETNA
Kent State University
http://etna.math.kent.edu
238
S. C. BRENNER, T. GUDI, AND L.-Y. SUNG
[24] T. N ILSSEN , X.-C. TAI , AND R. W INTHER, A robust nonconforming H 2 -element, Math. Comp., 70 (2001),
pp. 489–505.
[25] L. OWENS, Multigrid Methods for Weakly Over-Penalized Interior Penalty Methods, Ph.D. thesis,Department
of Mathematics, University of South Carolina, 2007.
[26] Z. S HI, Error estimates of Morley element, Chinese J. Numer. Math. Appl., 12 (1990), pp. 9–15.
[27] L. TARTAR, An Introduction to Sobolev Spaces and Interpolation Spaces, Springer, Berlin, 2007.
[28] H. T RIEBEL, Interpolation Theory, Function Spaces, Differential Operators, North-Holland, Amsterdam,
1978.
[29] R. V ERF ÜRTH, A Review of A Posteriori Error Estmation and Adaptive Mesh-Refinement Techniques, WileyTeubner, Chichester, 1995.
[30] M. WANG , J. X U , AND Y. H U, Modified Morley element method for a fourth order elliptic singular perturbation problem, J. Comput. Math., 24 (2006), pp. 113–120.