Renormalization of the Fermi Surface
advertisement

Renormalization of the Fermi Surface
Joel Feldman ∗
Department of Mathematics
University of British Columbia
Vancouver, B.C.
CANADA V6T 1Z2
feldman@math.ubc.ca
http://www.math.ubc.ca/∼ feldman/
Manfred Salmhofer Eugene Trubowitz
Mathematik
ETH-Zentrum
CH-8092 Zürich
SWITZERLAND
manfred@math.ethz.ch, trub@math.ethz.ch
Abstract
We review the role that renormalization plays in generating well–defined perturbation expansions for fermionic many–body models, particularly in the absence
of rotation invariance.
1
The Model
I would like to discuss what is involved in producing well–defined perturbation expansions
for fermionic many–body models, without first spending a long time explaining what a
fermionic many–body model is. So, I would like you to pretend that you are interested in
a class of models characterized by a function A(ψ, ψ̄) (called the action) of two vectors,
ψ = (ψk,σ )k∈M,σ∈{↑,↓} and ψ̄ = (ψ̄k,σ )k∈M,σ∈{↑,↓} . Note that ψ̄ is NOT the complex
conjugate of ψ. It is just another vector that is totally independent of ψ. Usually, the
components of vectors are labelled 1, 2, 3, · · ·. However, the vectors ψ and ψ̄ have their
components labelled (k, σ) with σ only taking two possible values, ↑ and ↓ (think “spin
up”, “spin down”) and k running over some as yet unspecified set M . I would like M
to be (an open subset of) Rd+1 , with the zero component k0 of k being interpreted as
∗
Research supported in part by the Natural Sciences and Engineering Research Council of Canada
and by the Forschungsinstitut für Mathematik, ETH Zürich.
1
an energy and the final d components k being interpreted as (crystal) momenta. But I
know that quite a few people are squeamish about this, so instead I will take M to be
some finite subset of Rd+1 , with the understanding that I will eventually take an infinite
volume limit in which M tends to (an open subset of) Rd+1 .
In our models, the quantities you measure are represented by other functions f (ψ, ψ̄)
of the same two vectors and the value of the observable f (ψ, ψ̄) in the model with action
A(ψ, ψ̄) is given by the ratio of integrals
D
R
E
f (ψ, ψ̄)
A
=
Q
f (ψ, ψ̄) eA(ψ,ψ̄) k,σ dψk,σ dψ̄k,σ
R
Q
eA(ψ,ψ̄) k,σ dψk,σ dψ̄k,σ
(1)
The integrals are fermionic functional integrals. That is, linear functionals on a Grassmann algebra. But, if you are not already comfortable with fermionic functional integrals,
pretend that they are ordinary integrals. It is common to choose the observable f (ψ, ψ̄)
to be a monomial
N
Q
f (ψ, ψ̄) =
ψpi ,σi ψ̄qi ,τi
i=1
D
E
The corresponding expected value f (ψ, ψ̄) is called the 2N –point Euclidean Green’s
A
function. The pi and qi are called external momenta.
We are not interested in arbitrary actions A(ψ, ψ̄). A typical action of interest is
that corresponding to a gas of electrons, of strictly positive density, interacting through
a two–body potential u(x − y). It is
Aµ,λ = −
P
Z
σ∈{↑,↓} M
− λ2
P
Z
dd+1 k
(2π)d+1
4
Q
σ,τ ∈{↑,↓} M i=1
2
k
(ik0 − ( 2m
− µ))ψ̄k,σ ψk,σ
dd+1 ki
(2π)d+1 δ(k1
(2π)d+1
(2)
+ k2 − k3 − k4 )ψ̄k1 ,σ ψk3 ,σ û(k1 − k3 )ψ̄k2 ,τ ψk4 ,τ
2
k
Here 2m
is the kinetic energy of an electron, µ is the chemical potential, which controls
the density of theR gas, and û is the Fourier transform of the two–body interaction. When
dd+1 k
M is a finite set, M (2π)
d+1 should be replaced by a Riemann sum and δ(k1 + k2 − k3 − k4 )
should be replaced by a discrete approximation to the delta function.
More generally, when the electron gas is subject to a periodic potential due to a
crystal lattice and when the electrons are interacting with the motion of the crystal
lattice through the mediation of harmonic phonons, the action is of the form
Aλ = −
P
σ
Z
M
dd+1 k
(2π)d+1
(ik0 − E(k))ψ̄k,σ ψk,σ − λV
(3)
where E(k) is the dispersion relation minus the chemical potential µ. There really should
also be a sum over a band index n, but it will not play a role here, so I have suppressed
it. The form of the interaction is not very important either, so I will delay writing it out.
2
The Problem
D
E
In the infinite volume limit, f (ψ, ψ̄)
is too complicated to evaluate explicitly, except
Aλ
when the coupling constant λ is zero. But you can fairly easily evaluate, in terms of
2
D
E
ordinary integrals of the type taught in first and second year calculus, f (ψ, ψ̄)
and
Aλ
all of its derivatives with respect to λ when λ = 0. There is a standard mnemonic device
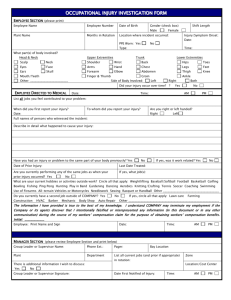
that uses Feynman diagrams as a compact notation for these ordinary integrals. Here is
one of the simplest Feynman diagrams and the integral it represents.
q
p
= −λ2
Z
t
dd+1 p dd+1 q
(2π)d+1 (2π)d+1
û(p)û(−p)
1
1
1
iq0 −E(q) i(p0 +q0 )−E(p+q) i(p0 +t0 )−E(p+t)
Observe that
• The integrals are pretty complicated.
• The integration variables are momenta.
• Each line of the diagram has an associated momentum, which is a linear combination of integration variables and external momenta (the momenta of the ψk,σ ’s and
ψ̄k,σ ’s of the observable f ) determined by conservation of momentum.
• The integrand contains, for each line of the diagram, a factor (called a propagator)
1
where k is the momentum associated with the line and the denominator
like ik0 −E(k)
ik0 − E(k) appears in the part of the action Aλ that is quadratic in ψk,σ , ψ̄k,σ .
The problem is that the denominator ik0 − E(k) can vanish, making the integrand singular. In fact these singularities are often sufficiently strong to destroy integrability.
Contributions to
D
E ∂n
f
(ψ,
ψ̄)
∂λn
Aλ λ=0
corresponding to Feynman diagrams that contain subdiagrams of the form
where each blob represents an arbitrary two–legged subdiagram, are not well–defined.
The reason is that, in the integral that such a Feynman diagram represents, conservation
of momentum forces the momentum flowing in each of the lines of the string to be the
1
in the integrand that correspond to lines of the
same. Hence all of the factors ik0 −E(k)
string are the same and the integral looks like
Z
=
dk
···
1
[ik0 − E(k)]p
···
The left hand side represents a generic Feynman diagram that contains a string of p
lines. The right hand side gives the value of that diagram, though only the factors in
3
the integrand associated to the lines of the string are given explicitly. Because E(k)
1
is not
vanishes on a d − 1 dimensional surface, called the Fermi surface, [ik0 −E(k)]
p
locally integrable for any p ≥ 2. To see this make a change of variables from (k0 , k) to
~ = d − 1 angular variables
φ
y = E(k)
x = k0
and then to
q
r=
θ = tan−1 xy
x2 + y 2
~ = d − 1 angular variables
φ
~ the Jacobian of the first change of variables
Denoting by J(x, y, φ)
Z
dd+1 k
h(k)
=
[ik0 − E(k)]p
Z
Z
=
~ J(x, y, φ)
~
dx dy dd−1 φ
~r
dr dθ dd−1 φ
Z
=
dr
= ∞
1 Z
h
[ix − y]p
Jh
[ireiθ ]p
~ (−i)p e−ipθ Jh
dθ dd−1 φ
rp−1
for generic h if p ≥ 2
D
E
We hasten to emphasize that this divergence does not signal that f (ψ, ψ̄)
D
E
Aλ
is ill–
is not C ∞ in λ. Furthermore, we shall shortly see
defined. It signals that f (ψ, ψ̄)
Aλ
that if we are a bit more careful about the dependence on the parameter λ that we
introduce in our models, we can recover smoothness in λ.
3
The Root of the Problem
The lack of integrability that we identified in the last section is associated with strings
of two–legged subdiagrams. In fact, it is true, though not obvious, that all of the integrals giving the value of any diagram, that does not contain a nontrivial two–legged
subdiagram, converge. On a formal level, we can prevent strings from ever appearing
by blocking the sum of all diagrams. First, compute the sum of all strings and call it
1
:
ik0 −E(k)−Σ(k)
+
=
=
Σ
+
Σ
Σ
+ ···
+
1
1
1
ik0 −E(k) + ik0 −E(k) Σ(k) ik0 −E(k)
1
ik0 −E(k)−Σ(k)
1
1
1
ik0 −E(k) Σ(k) ik0 −E(k) Σ(k) ik0 −E(k)
+ ···
where the proper self–energy Σ(k) is the sum of all two–legged diagrams
that cannot
be disconnected by cutting a single line. Such diagrams are called two–legged 1PI diagrams. Define a skeleton diagram to be a diagram that does not contain any nontrivial
two–legged subdiagrams. Then, formally (or when the set M of allowed momenta is finite
4
so that all Feynman diagrams have trivially well–defined values),
X
1
ik0 − E(k)
value of G, using propagator
all diagrams G
=
X
value of G, using propagator
skeleton
diagrams G
1
ik0 − E(k) − Σ(k)
This formula is almost obvious, provided that you don’t think about it enough to realise
that Σ has only been defined .
Σ=
X
value of G, using propagator
all two–legged
1PI skeleton
diagrams G
1
ik0 − E(k) − Σ(k)
(4)
Set aside, for the time being, the question of the solubility of (4) in the infinite volume
limit. Assuming that the solution exists and that Σ(k) is at all reasonable, the propagator
1
is locally integrable. But if, in the process of expanding
ik0 −E(k)−Σ(k)
D
we expand
E
f (ψ, ψ̄)
Aλ
=
∞
X
n=0
λn ∂ n
n! ∂λn
D
E
f (ψ, ψ̄)
∞
X
1
1
=
ik0 − E(k) − Σ(k) n=0 ik0 − E(k)
Aλ λ=0
Σ(k)
ik0 − E(k)
!n
(5)
no term of the right hand side, except n = 0, is locally integrable. The problem arises
1
because we are attempting to expand the interacting propagator ik0 −E(k)−Σ(k)
, which has
a singularity when k0 = 0 and k is on the interacting Fermi surface
Fλ = { k | E(k) + Σ((0, k)) = 0 }
in powers of the free propagator
on the free Fermi surface
1
ik0 −E(k)
which has a singularity when k0 = 0 and k is
F0 = { k | E(k) = 0 }
In practice, implementation of the above resummation algorithm is not completely
trivial, because it is not easy to verify the solubility of (4). In fact, it is far from obvious
that the right hand side of (4) is even once differentiable with respect to Σ, because
1
once with respect to Σ produces a string of length two. And
differentiating ik0 −e(k)−Σ(k)
P
r
you will certainly not be able to solve (4) for Σ(k, λ) = ∞
r=1 λ Σr (k) as a formal power
series in λ, because the right hand side is certainly not C ∞ in Σ. However, there is
a procedure that implements, at least the important part of, the above resummation
algorithm and that can live mostly in the land of formal power series. The procedure is
renormalization.
5
4
Renormalization
Suppose that we are interested in a model with some prescribed E(k) and λ. Pretend,
temporarily, that you know the proper self–energy Σ(k, E, λ) for this model. Write
E(k) = e(k) + δe(k) where e(k) has the property that its zero set { k | e(k) = 0 }
coincides with the interacting Fermi surface
Fλ = { k | E(k) + Σ((0, k), E, λ) = 0 }
The condition { k | e(k) = 0 } = Fλ does not uniquely determine the decomposition
E = e + δe. It only forces
δe(k) + Σ((0, k), E, λ) = 0 for all k ∈ Fλ
(6)
Suppose that we have found a decomposition E(k) = e(k) + δe(k) satisfying (6). If we
expand
1
1
=
ik0 − E(k) − Σ(k)
ik0 − e(k) − δe(k) − Σ(k)
!n
∞
X
1
δe(k) + Σ(k)
=
ik0 − e(k)
n=0 ik0 − e(k)
(7)
the numerator δe(k) + Σ(k) vanishes on Fλ , the zero set of the denominator, and, under
is bounded. Then each term in the
reasonable regularity conditions, the ratio δe(k)+Σ(k)
ik0 −e(k)
expansion is locally integrable. Now rewrite
A = −
= −
where
P
σ
P
σ
0
Z
Z
dd+1 k
(2π)d+1
(ik0 − E(k))ψ̄k,σ ψk,σ − λV
dd+1 k
(2π)d+1
(ik0 − e(k))ψ̄k,σ ψk,σ − λV 0
λV = λV +
R
Z
dd+1 k
(2π)d+1
(8)
δe(k)ψ̄k,σ ψk,σ
d+1
d
k
and view (2π)
d+1 δe(k)ψ̄k,σ ψk,σ as part of the interaction, rather than as part of the free
action, which determines the propagator. This changes the value of
n
n
Σ(k)
δe(k)+Σ(k)
1
1
from ik0 −E(k)
, which is not locally integrable, to ik0 −e(k)
, which
ik0 −E(k)
ik0 −e(k)
is.
In practice, Σ(k, E, λ) is not known ahead of time, so we reorder the procedure.
First, fix a function e(k) and forget, again temporarily, about E(k). Next, we will define
a function δe(k) = δe(k, e, λ) which obeys
δe(k) + Σ((0, k), e + δe, λ) = 0 for all k with e(k) = 0
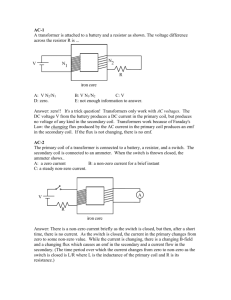
This can be done by defining any reasonable projection P onto the interacting Fermi
surface F = { k | e(k) = 0 } , as in the following figure,
6
k
Pk
Fλ
and setting
δe(k) = −
X
all 2–legged 1PI diagrams|k0 =0,
Pk
= −Σ((0, P k), e + δe, λ)
(9)
Recall that “1PI” means that the diagram cannot be disconnected by cutting one line.
Of course (9) is an implicit equation for δe. However, unlike (4), the solubility of (9)
in perturbation theory is trivial because Σ is O(λ) and because our construction has
been designed to provide the needed regularity. So, for a given e(k), it is a relatively
simple matter to construct a suitable δe(k, e, λ) and then define a corresponding E(k) =
e(k) + δe(k, e, λ). But, to end up with the prescribed E(k) of the model that we fixed
at the beginning of this section, we must still solve
E(k) = e(k) + δe(k, e, λ)
(10)
for
e(k) = e(k, E, λ)
Because δe(k, e, λ) does not depend smoothly on its second argument, the solubility of
(10) is a somewhat delicate problem. We discuss it in the next section.
5
Results
We have above developed a vague picture in which the expected values hf i of observables,
when viewed as functions of λ with E held fixed are not smooth. But all derivatives with
respect to λ, with e rather than E held fixed, are well-defined. We now quote some
more precise statements that firm up this picture. We consistently make hypotheses that
are stronger (sometimes substantially stronger) than necessary in order to simplify the
statements as much as possible. The cutoff expected values are
D
R
E
f (ψ, ψ̄)
κ
=
f (ψ, ψ̄)eAI,κ(ψ,ψ̄) dµC,κ(ψk,σ , ψ̄k,σ )
R A (ψ,ψ̄)
e I,κ
dµC,κ(ψk,σ , ψ̄k,σ )
where
• dµC,κ is the Grassmann Gaussian measure with mean zero and covariance
δσ,σ 0
ρ(|k|/ℵ)
ik0 − e(k)
Q
This measure combines the measure k,σ dψk,σ dψ̄k,σ of (1) with the “free” part of
the action. Precise hypotheses on e(k) will be given later. The role of the function
ρ(|k|/ℵ) will be discussed shortly.
7
• The parameter κ in dµC,κ specifies the infrared cutoff and will ultimately be sent to
zero. The infrared cutoff can be imposed in many different ways without affecting
the results that follow. For concreteness, put the model in a periodic spatial box of
side κ1 , so that the spatial components k of momenta run over 2πκZd , and set the
temperature to κ so that k0 runs over πκ(2Z+ 1). Thus the set of allowed momenta
is Mκ = { k ∈ πκ(2Z + 1) × 2πκZd | ρ(|k|/ℵ) 6= 0 }.
• The interaction part AI,κ of the action is given by
κd+1
X
δe(k, λ)ψ̄k,σ ψk,σ
k∈Mκ
σ∈{↑,↓}
+ λ2 κ3(d+1)
X
δk1 +k2 ,k3 +k4 ψ̄k1 ,σ ψk3 ,σ hk1 , k2 |V|k3 , k4 i ψ̄k2 ,τ ψk4 ,τ
ki ∈Mκ
σ,τ ∈{↑,↓}
where the sum of all counterterms δe(k, λ) will be chosen later.
• The function ρ is a C0∞ function that is one in a neighbourhood of zero and ℵ is
fixed but arbitrary. Thus ρ(|k|/ℵ) restricts consideration to momenta in a large
compact set that contains the momenta { k ∈ Rd+1 | k0 = 0, e(k) = 0 } that
are important for the problem under consideration. This restriction, which did not
appear in (8), can be easily removed under suitable hypotheses on the behaviour
of e(k) and hk1 , k2 |V|k3 , k4 i near infinity, but I don’t want to draw attention away
from the important regime by stating these hypotheses.
The following Theorem states that the perturbation expansion coefficients for the Euclidean Green’s functions and the proper self–energy exist under very weak hypotheses
on e(k) and hk1 , k2 |V|k3 , k4 i. A natural norm for measuring the size of the 2N –point
functions is
Z N
X
Q
dpj dqp |GN (p1 , σ1 , · · · , qN , τN )|
|GN | =
σj ,τj ∈{↑,↓}
j=1
When GN is only defined on a discrete set of momenta, extend it to be piecewise constant
on R2N (d+1) so that integrals are replaced by their Riemann sum approximants.
Theorem 1 ([FKST, Theorem I.2]) Assume
H1) e(k) is C 1
H2) ∇e(k) 6= 0 for all k with e(k) = 0
H3) hk1 , k2 |V|k3 , k4 i is real, C 1 and invariant under time reversal. That is,
hk1 , k2 |V|k3 , k4 i = hT k1 , T k2 |V|T k3 , T k4 i
where T (k0 , k) = (−k0 , k).
8
P
r
There is a formal power series δe(k, λ) = ∞
r=1 λ δer (k), independent of κ, such that
the following holds. Expand the 2N –point Euclidean Green’s functions and the proper
self–energy
∞
P
GN,κ ( · , λ) =
r=1
∞
P
Σκ ( · , λ) =
r=1
λr GN,κ,r ( · )
λr Σκ,r ( · )
as formal power series in the coupling constant λ. Here each · refers to the appropriate
set of spins and momenta. Then the limits GN,0,r = limκ→0 GN,κ,r and Σ0,r = limκ→0 Σκ,r
exist and, for every 0 ≤ < 1,
sup |GN,κ,r ( · )|| < ∞
κ
sup κ−|GN,κ,r ( · ) − GN,0,r ( · )|| < ∞
κ
sup |Σκ,r (p, σ)| < ∞
p,κ
−
sup κ |Σκ,r (p, σ) − Σ0,r (p, σ)| < ∞
p,κ
Stronger hypotheses are required for the map from e(k) to e(k) + δe(k, e, λ) to be
injective. It does not make sense to ask for a formal power series inverse for that map,
because δe(k, e( · ), λ) is NOT C ∞ in e( · ). Instead, we truncate the formal power series
expansion of δe at an arbitrary power R and treat the result as a true function of λ,
rather as a formal power series in λ.
Theorem 2 ([FST1, Theorem I.4]) Assume
H1’) e(k) is C 2
H2) ∇e(k) 6= 0 for all k with e(k) = 0
H3’) hk1 , k2 |V|k3 , k4 i is real, C 2 and invariant under time reversal.
H4) The Fermi surface has no flat pieces (for a precise definition see [FST1, Assumption
A3])
P
r
1
Then for all R ∈ N , δe(R) (k, λ, e) = R
r=1 λ δer (k) is C in k. Furthermore the Fréchet
(R)
(R)
derivative De δe of δe with respect to e exists and obeys, for all h ∈ C 1 ,
sup |hDe δe(R) , hi(k)| ≤ const|λ| sup |h(k)|
k
k
Thus the derivative of δe(R) (k, e( · ), λ) with respect to e( · ) is a bounded linear
operator from C 0 to C 0 , whose norm, for sufficiently small λ, is strictly smaller than one.
The set of e satisfying (H10 , H2, H4) is open, so if e1 and e2 are close enough together, the
(R)
above Theorem applies to all e on the line from e1 to e2D. Then e1 +δe(R) (e1 ) = e2 +δe
(e2 )
E
R1
(R)
implies that (1l + L )(e2 − e1 ) = 0, where L h = 0 dt De δe ((1 − t)e1 + te2 ), h . Since
De δe(R) has norm less than one for small λ, we have
9
Theorem 3 ([FST1, Theorem I.7]) Let D be a convex set of dispersion relations e
obeying (H10 , H2, H30 , H4) with uniform bounds. For each R ∈ N , there is λR > 0
such that for all λ ∈ (−λR , λR ), the map e 7→ e + δe(R) is injective on D.
To get invertibility we have to strengthen the hypotheses still more. Let | · |j denote
the usual norm on C j .
Theorem 4 Let G > 1 and E ⊂ C 2 be an open set of dispersion relations e fulfilling
H1”) |e|2 < G and e(p) = e(−p) for all p
H2) |∇e(p)| >
1
G
for all p within a distance
1
G
of { k | e(k) = 0 }
H3’) hk1 , k2 |V|k3 , k4 i is real, C 2 and invariant under time reversal.
H4”) The Fermi surface { k | e(k) = 0 } has curvature at least
tion, see [FST2, Hypotheses (H3)–(H5)])
1
G
(for a precise defini-
Then
a) [FST3, Theorem 1.1] δe(R) ∈ C 2 for all e ∈ E.
b) [FST4] Let E 0 ⊂ E be the set of all dispersion relations e whose distance from the
boundary of E is at least 1/G. For each R ∈ N , there is λR > 0 and a map
R : (−λR , λR ) × E 0 → E such that for all (λ, E) ∈ (−λR , λR ) × E 0 , e = R(λ, E)
solves E = e + δe(R) .
Set K(e)(k) = δe(k, e, λ). To prove part b) of Theorem 4 using the usual implicit
function theorem, one would need to prove an estimate like
|K(e1 ) − K(e2 )|2 ≤ α|e1 − e2 |2
for some α < 1. To prove such an estimate one needs to be able to take three derivatives
of K, one with respect to e and two with respect to the external momentum k. We can
only control 3 − derivatives. Fortunately, the following implicit function theorem only
requires control of 2 + derivatives.
Proposition 5 ([FST4]) Le N ⊂
constants α, β, , A, C obey
Define
Rd be open, E ∈ C 2 (N ) and the strictly positive
α < 1, β < α
B = { e ∈ C 2 (N ) | |e − E|2 ≤ A }
Assume that the map K : B → C 2 (N ) obeys
a) |K(e)|2 ≤ A
b) |K(e1 ) − K(e2 )|1 ≤ α|e1 − e2 |1
10
c) |K(e1 ) − K(e2 )|2 ≤ C|e1 − e2 |1 + β|e1 − e2 |2
for all e, e1 , e2 ∈ B. Then there is a unique e ∈ B such that E = e + K(e).
Proof: Define φ(e) = E − K(e). By hypothesis a) φ is defined on B and has range
contained in B. Set e0 = E and define the sequence
en = φ(en−1 )
in B. Denote δn = en − en−1. By hypotheses a) and b), for every n ≥ 1
|δn |1 = |en − en−1|1 = |φ(en−1 ) − φ(en−2 )|1
≤ α|δn−1 |1 ≤ αn−1 |δ1 |1 = αn−1 |φ(e0 ) − e0 |1
= αn−1 |E − K(E) − E|1 ≤ Aαn−1
Hence, by hypothesis c), for every n ≥ 2
|δn |2 = |en − en−1|2 = |φ(en−1 ) − φ(en−2 )|2
≤ C|δn−1|1 + β|δn−1|2
≤ C Aα−2
αn + β|δn−1|2
We make the inductive hypothesis that there is a constant D such that |δn |2 ≤ Dαn .
This is satisfied for n = 1 if D is chosen so that
A ≤ Dα
and is preserved under induction if
C Aα−2
Hence we need
and
αn + βDα(n−1) ≤ Dαn
D ≥ Aα−
D ≥ C Aα−2
+ βDα−
Such a D exists since βα− < 1 .
P
Consequently, since α < 1, the series δn converges in C 2. The sum, e = limn→∞ en
is a fixed point of φ and hence obeys
e = E − K(e)
Uniqueness of the solution follows immediately from hypothesis a) since α < 1.
11
t
u
References
[FKST] J. Feldman, H. Knörrer, M. Salmhofer, and E. Trubowitz, The Temperature
Zero Limit, ETH preprint.
[FST1] J. Feldman, M. Salmhofer, and E. Trubowitz, Perturbation Theory around
Non–Nested Fermi Surfaces, I. Keeping the Fermi Surface fixed, Journal of Statistical Physics, 84 (1996) 1209-1336.
[FST2] J. Feldman, M. Salmhofer, and E. Trubowitz, Perturbation Theory around
Non–Nested Fermi Surfaces, II. Regularity of the moving Fermi Surface: RPA Contributions, ETH preprint.
[FST3] J. Feldman, M. Salmhofer, and E. Trubowitz, Regularity of interacting
Nonspherical Fermi Surfaces: The Full Self-Energy, ETH preprint.
[FST4] J. Feldman, M. Salmhofer, and E. Trubowitz, An Inversion Theorem for
Nonspherical Fermi Surfaces, in preparation.
12