Joel Esposito, Matthew Feemster, Erik Smith US Naval Academy Swarm Manipulation
advertisement

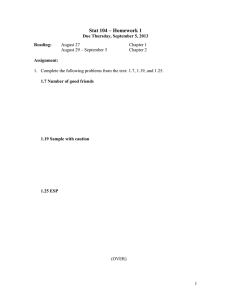
Tugboat Swarms for
Distributed Manipulation
Joel Esposito, Matthew Feemster, Erik Smith
US Naval Academy
Swarm Manipulation
Force Control: Adaptive Approach
u
Grasp Planning: Quality Function
1
Army Ants: no communication,
limited visual sense.
Humans: communicate only qualitative
information during manipulation.
Dynamics:
M(v)v& + Dv = BU
α1
Tug thrust
magnitudes
Tug configuration
matrix UNKNOWN!
r1
y
cos(α2 )
L⎤
⎡ cos(α1)
B = ⎢⎢ sin(α1)
sin(α2 )
L⎥⎥
⎣⎢r1 sin(α1 −θ1) r2 sin(α2 −θ2 ) L⎥⎦
Select new contact
location to…
x
…apply largest wrench
using smallest forces
Q * = m ax m in m ax
r2
α2
w ∈W
u ∈U |
B i ≠ N ∈ Bˆ w = B u
BN
w
4
3
Barge
2
u
1
u2
Can one design a distributed manipulation algorithm that requires
no communication between swarm members?
5
−1
Plan for worst case wrench direction
AND
Worst case locations of other tugs!
Control: U = ⎡⎣ R(ψ ) M −1 Bˆ ⎤⎦ ⎡⎣ P&&d + α e& + K r r +ψ& × P& + R (ψ ) M −1 DRT P& ⎤⎦
To what extent does communication improve performance?
Adaptive update law estimates magnitudes of entries
Grasp Planning:
Geometry
Tugboat Mission
Set of possible wrenches under L − ∞
norm is a polyhedral in R3 (a Zonotope)
Dock
4
Want to max/ min distance from origin
to closest facet (weakest direction)
Barge
max min
1
BN
Parameter Value
1.5
1
0.5
0
0
Sugar, Brock,
Khatib, Li, Lentz,
Canny, etc
Start
1
2
3
4
5
X position (m)
6
7
Converges to desired pose
with small steady state error
8
1
0
-1
0
100
time (s)
200
100
200
time (s)
Parameter: B5
0
-0.2
-0.4
-0.6
-0.8
0 10 20 30
time (s)
Parameter: B8
0
-2
-4
0
100
time (s)
200
Uncertain
Find
0
100
200
time (s)
Parameter: B6
How?
0.5
1
0.5
0
X
-0.5
-1
-3
-2
Best new wrench to apply
0.4
20 40 60
time (s)
Parameter: B9
1
0.2
0
0
0
-0.5
0
-0.2
-0.4
-0.6
-1
-1
0
100
time (s)
-0.8
200
1
0.5
Unknown tug locations in B
matrix are adjusted online
0.5
0
-0.5
Fy
-0.5
0
Force Control: Conclusions
0.5
1
1
0.5
0
0
-0.5
Fy
-0.5
-1
-1
Fx
Grasp Planning: Conclusions
• Adaptive control provides a method to infer
information about other swarm members
without communication.
• Optimize a grasp quality function, max-min
framework for uncertainty, L − ∞ norm unique
geometry.
Best applied thrust
• Only a priori information is number of tugs and
signs of moment arms.
• Concave in certain cases. Scales well with
swarm size. Makes computation easy.
Adaptive control
• Experimental verification on 6 boats, needs to
be generalized.
• More investigation of concavity needed for
general case.
Exact attachment point of other tugs
Min-max grasp
quality function
-1.5
44 extremal wrenches
w/ L-infty norm
-1
-1.5
Phase 2: Force control
Own pose, barge pose, number of tugs, goal pose
Best attachment point
0
3
Example: 7 tugs
0
-1
Fx
Sub-Problems and Approach
1.5
2
100
200
time (s)
Parameter: B7
0
0
Mz
0
1
-1
0
-1
Parameter Value
100
200
time (s)
Parameter: B4
Grasp Planning:
Results
Parameter: B3
1
Mz
End
__Centerline
2
0
Parameter Value
__Path Taken
-1
-1.1
Parameter: B2
1
Parameter Value
* Stern
Parameter Value
2.5
* Bow
Parameter Value
Y position (m)
3
Parameter Value
4
Parameter: B1
-0.9
Parameter Value
Closely Related Works:
• Caging
Cooperative Manipulation:
• Centralized /Static control
• Dynamic objective
Known
Yes. Second- order Cone.
Easy to solve
Y
Experimental Position and Orientation using Adaptive B Controller for IC-1
Parameter Value
Force Control: Results
Zhidong, Kumar
Ponce, et al.
Phase 1: Grasp Planning
)
⎛
⎡ ( B j × Bk ) ⋅ Bi ⎤ ⎞
⎥⎟
dist ( Fjk ) = ⎜ ∑ max ⎢ 0,
⎜ i =[1, N ]
B j × Bk ⎥⎦ ⎟
⎢⎣
⎝
⎠
No. Determine which wrenches are active.
But may be done a priori in certain cases.
3.5
Desai, Kumar, Fierro Bishop,
Tanner, Pappas, Jadbabaie
Passiano,Olfati-Saber,
Murray
min dist ( F jk )
Concave?
Related work
Swarms, Flock, Formations:
• Distributed control
• Kinematics objective
(
B1LBN −1 ( j , k )∈[1, P ']
-2
5
–Assume tugs “tie-up” to barge, actuator limits
–Non-trivial hydro-dynamics
–Distributed decision making
–Can use wireless messages to coordinate
1
2
-1
Tugboats
2
3
Where
should I go?
{esposito, feemster, m076276} @ usna.edu
Funded by the ONR Grant #N0001405WRY20391