Document 11072054
advertisement

^^
^ (libraries, ^
t,44- '"'"•
n-
TS'S©' *)
,5.<'»a."
.>«"
ALFRED
IN
P.
WORKING PAPER
SLOAN SCHOOL OF MANAGEMENT
REDUCING THE VARIANCE OF
SOJOURN TIMES
MULTICLASS QUEUEING SYSTEMS
Lawrence M. Wein
MIT Working Paper # 3093-89MS
November 1989
MASSACHUSETTS
INSTITUTE OF TECHNOLOGY
50 MEMORIAL DRIVE
CAMBRIDGE, MASSACHUSETTS 02139
IN
REDUCING THE VARIANCE OF
SOJOURN TIMES
MULTICLASS QUEUEING SYSTEMS
Lawrence M. Wein
MIT Working Paper # 3093-89MS
November 1989
Ill T
,
•'ynnnicti,
JANl 2 nso
RECEIVED
REDUCING THE VARIANCE OF SOJOURN TIMES
IN MULTICLASS QUEUEING SYSTEMS
Lawrence M. Wein
Slocin
We
of the
School of Management, M.I.T.
consider the bi-criteria scheduling problem of minimizing a convex combination
mean and
variance of sojourn times in three queueing systems fa single queue, a
two station closed network, and a two station network with controllable inputs) populated
by various customer types.
sojourn times
time variance.
among
The sum
the various customer types
is
mean
used as a surrogate for the sojourn
Brovvnian approximations to these three scheduling problems are solved.
and the solutions are interpreted
show that
of the squares of the pairwise differences in
in the
in
network settings,
order to obtain scheduling policies. Simulation results
in contrast to the single
queue case, there are priority
sequencing policies that significantly reduce the variance of sojourn times relative to the
first-come first-served policy.
Subject classification: Production/scheduling: priority sequencing in a stochastic job
shop. Queues: Brownian models of network scheduling problems.
November 1989
REDUCING THE VARIANCE OF SOJOURN TIMES
IN MULTICLASS QUEUEING SYSTEMS
Lawrence M. Wein
Sloan School of Management, M.I.T.
The
objective in scheduling most multiclass queueing systems
sojourn time of customers.
However,
in
many
is
practical situations,
minus
arrival date),
performance.
In
all
arriving jobs axe quoted the
mean
also desirable
many
same due-date lead time (due-date
and so a smaller sojourn time variance
will lead to better
due-date
service systems, the desire to treat all customers as equitably as
some
possible dictates that a small sojourn time variance
facilities,
is
it
For example, in
to keep the variance of the sojourn times as small as possible.
manufacturing systems,
to minimize the
is
In
required.
many production
low variability in sojourn times leads to easy coordination with
downstream
its
customers and upstream suppliers.
For single server, single class queueing systems, the first-come first-served (FCFS)
policy minimizes sojourn time variance over the class of work-conserving sequencing policies
(see
Kingman
[15]).
Furthermore, Groenevelt
[4]
reducing sojourn time variance in single server, multiclass queues.
the shortest expected processing time
the
mean sojourn time
in
many
(SEPT)
FCFS
has shown that
rule (see
Klimov
is
also well
It is
[18]. for
effective in
known
that
example) minimizes
single server, multiclass queueing systems.
The SEPT
rule,
however, can lead to a very large sojourn time variance; when the load on the system
very heavy, customers with the largest expected processing times
for a long period of time, while
usually
move through
sit
in the
queue
customers with the shortest expected processing time
will
the system relatively quickly. Thus, a fundamental tradeoff exists in
single server, multiclass queues
and system
may
is
between system efRciency (minimizing mean sojourn time)
equitabiiity (minimizing sojourn time variance).
1
As a
result,
some authors
(see
Jackson
[10]-[12],
Kleinrock
and Shanthikumar
[16],
and analyzed alternative sequencing
[22], for
example) have suggested
attempt to address
policies that
this tradeoff in
manner.
effective
However, very
little is
known about
this tradeoff in a
network
an arduous task (see Chapter 4 of Walrand
the tradeoff
is
queueing network underlying
its
all
criteria,
is
visited
class will
each customer class
own
first
is
served
is
In a manufacturing setting, a
produced by the
at a particular single server station in
of the three queueing systems
The second system
constant, and
exogenously
when
(in a
is
is
its
facility.
A
different
the network, and has
own independent renewal
a customer departs the network, the type of the
is
input process.
new customer
Markovian or deterministic fashion) according to a
class to serve next at each station:
third system
a single server, multiclass queue, where
a closed network, where the total population in the network
both of these systems, the scheduling decision
when
need to define the basic
be defined for each combination of type ajid stage of completion, and
each of the various types of customers has
The
first
general service time distribution.
The
In
therein). In this paper,
by various types of customers, each with
customer type represents a particular product that
its
we
arbitrary deterministic route through the system.
customer
policy
three queueing systems. Using the terminology of Kelly
we assume the queueing network
own
FCFS
assessed by analyzing a bi-criteria scheduling problem for three multiclass
queueing systems. Before describing the various
[14],
and references
[24]
Indeed, just
setting.
obtaining sojourn time variances in single class queueing networks under the
is
an
we
is
will refer to
to
is
is
held
chosen
specified product mix.
dynamically decide which customer
these decisions as sequencing decisions.
a network with controllable inputs, where the scheduler also decides
to release the next customer into the network.
It is
assumed that there
expected average throughput rate that must be maintained, and there
is
an
is
a specified
infinite line of
customers lined up outside the network waiting to gain entrance. The type of each entering
customer
is
again exogenously specified according to a particular product mix.
2
Since analyzing the variance of sojourn times
so difficult in a multiclass queueing
is
network, we propose a surrogate measure for the bi-criteria scheduling problems. In par-
the pairwise differences in
mean
sojourn times
two
of the
first
among
mean sojourn
every customer type has the same
The
sum
surrogafe variance of the sojourn times as the
ticular, define the
the various customer types. Thus,
time, then there
criteria in ep.:h of the three
of the squares of
if
zero surrogate variance.
is
minimization problems
is
the surrogate
variance. In the single station queue and the network with controllable inputs, the second
criterion
is
the
mean sojourn
mean number
all
to
is
mean
mean
the
inversely proportional to the
the
which
time in both systems by Little's formula (see Little
work, the second criterion
is
of customers in the system,
idleness rate at
mean throughput
proportional to the
is
an arbitrarily chosen server, which
rate of the network.
idleness rate of a server will minimize the
In the closed net-
[19]).
Hence minimizing
mean sojourn time
of customers.
three problems, a weight c will be put on the second criterion, and the objective
minimize the weighted average of the two
minimize the surrogate variance, and when
criteria.
When
c
c —* oc, the objective
In
is
=
0,
the objective
is
to
minimize the mean
is
to
sojourn time.
If
the primary objective of the queueing system
is
to equalize the sojourn times across
the various customer types, then minimizing the surrogate variance
criterion.
Moreover, a reduction
in the
is
the most appropriate
surrogate variance should lead to a reduction in
the actual sojourn time variance, unless the reduction in surrogate variance results in a
large increase in the
problem
The
mean sojourn
times. In such cases, solving the bi-criteria scheduling
for various values of c should lead to a reduction in sojourn
time variance.
three bi-criteria scheduling problems will be analyzed using the Brownian network
model introduced by Harrison
[7],
which approximates a multiclass queueing network with
dynamic scheduling capability under balanced heavy loading conditions. This model allows
the bi-criteria scheduling problems to be approximated by control problems for Brownian
motion.
When
c
—
>
cx),
the three scheduling problems described above have been amalyzed
3
in
Harrison
[26]
[7]
(single queue), Harrison
and Wein
[9]
(closed network),
and Wein
[25]-
(network with controllable inputs) by solving and interpreting a reformulation of the
approximating Brownian control problem.
In this paper,
value of
c.
we
generalize these analyses to include the bi-criteria objective for any
For the single queue, we find in Section
the surrogate \-ariance, which
is
1
that
FCFS
is
effective in
not surprising in Hght of Groenevelt's
minimizing
The
results.
[4]
closed network and network with controllable inputs are analyzed in Sections 2 and
respectively,
and
in Section 4 that
a sm:iulation experiment involving a two-station
results
imply that, as
in the single server case, the tradeoff
system efficiency and system equitability exists
minimizes sojourn time variance
outperformed on
undertaken
is
demonstrates the effectiveness of the procedure.
The simulation
FCFS
network
3.
dimension
this
in the
in the
between
network setting. However, whereas
in the single server case,
we
find that
it
easily
is
network case. This should not be surprising, since
some customer types may have longer routes (and/or processing times) than other customer
types,
and FCFS
will generally
cause the types with the longer routes to have longer sojourn
times.
The simulation
to be
an
results suggest that reducing the surrogate \'ariance does indeed
time variance.
effective surrogate for reducing sojourn
tradeoff between the
mean sojourn time and sojourn time
depends on the magnitude of the surrogate
mean sojourn
time.
the surrogate variance
If
sojourn time variance
\'ariance
is
is
not possible. However,
further large reduction in sojourn time variance
example under two
seem
Also, the nature of the
variance
is
problem
specific,
and
under the policy that minimizes the
small, then a further large reduction in
if
the surrogate variance
may be
possible.
sets of data in order to illustrate these
two
We
cases.
is
large,
then a
simulated our
It is
test
interesting to
note that in both cases, a sequencing policy was found that simultaneously reduced the
mean sojourn time and
the sojourn time variance with respect to
FCFS.
In the simulation study, the closed network and network with controllable inputs
were tested against an open network that used deterministic input. Not surprisingly, the
reduction in sojourn time variance from the open network to the other two networks (using
the
FCFS
among
variance
In
sequencing policy
in all ccises) easily
dominated the reduction
in sojourn time
the various sequencing policies (while holding the release policy fixed).
summary, the
easiest
and most commonly used
maximizes system equit ability
in single server queues,
imize system efficiency with respect to
priority sequencing policy
and
FCFS, then one
therefore,
if
one wants to max-
some
sacrifices
(FCFS)
Our
equitability.
network setting, there exists sequencing poUcies that improve both
results suggest that in a
system efficiency and system equitability with respect to FCFS.
A
1.
Single Server
Queue
who
Consider a single server queue visited by A' customer classes
independent renewal processes with average arrival rates \k.k
class has a general service time distribution with
customer exits the system
queueing system
p
is
the system at time
idle
up
to time
i.
—
is
that >/n(
n
=
100.
by Zk{t)
is
1
p)
=
t,
after receiving service.
^^.-i ^k^^k-
and
let
I{t]
and
of
The system parameter n
=
Qk{'n.t)/^/n
and
['(/
)
=
mj.
and
Each customer
l....,A'.
finite variance,
and each
Therefore, the traffic intensity of the
Let Qk{t) be the
number
of class k customers in
be the cumulative amount of time that the server
The Brownian model assumes
positive
mean
=
arrive according to
moderate
is
the existence of a large integer n such
a representative
size;
example
used to define the rescaled processes
I(nt)/y/n for
obtained by letting the parameter n approach
/
is
>
0,
is
Z =
p
=
.9
and
(Zk) and
U
and the Brownian control problem
infinity.
Since the proposed scheduling policy depends only on the solution to the workload
formulation,
we
will
go directly to the workload formulation of the Brownian control prob-
lem that approximates
this scheduling
problem. In Section 6 of Harrison
that the problem (the objective function will be stated shortly)
is
[x], it is
to choose
RCLL
shown
(right
continuous with
left
limits) processes
Z =
[Zk) and
K
^TnkZk(t) = B{i) + V{t)
Z[t]>
U
where
5
variance,
and with B(0)
the scheduling pohcy
processes.
moments
is
=
t
>
0.
such that
for all
f
>
0.
(1.1)
and
0.
nondecreasing with U{0)
is
a one-dimensional
is
for all
U
(1.2)
=
(1-3)
0,
Brownian motion process with a particular
For
all
independent of the parameters of the
refer readers to Harrison
assume that Z and
U
[7]
\-arious
Brownian motion
in later sections,
Also,
for their derivation.
are nonanticipating with respect to the
assumptions are made
co-
first
and second
and service times, the product mix, and the routing
of the interarrival times
we
and
the problems addressed in this paper, the form of
These parameters are complicated expressions involving the
information:
drift
it
will suffice to
Brownian motion B. Similar
and readers are referred
to the earlier papers in
this area for a justification.
By
The
Little's
first
term
formula, our objective function can be written as
in (1.4) is
proportional to the
second term
is
Harrison
the solution to this problem
[7],
mean
steady-state sojourn time, and the
the surrogate sojourn time variance.
U{t)
is
= -
By
the argmnent in Section 6 of
to choose
inf
B{s)
(1.5)
0<3<(
and
to find, for
each time
t,
the solution Z'{t) to the quadratic
program
n^E^^o.iED^^-^r
mil
A,
= 1
subject to
(i.e)
A,
j=i k=\
^mtZi(0 = ^nO,
(!")
Jt=i
Z(0>0,
(1.8)
where the one-dimensional workload process W{t)
\V{t}
= B(t)-
is
inf
0<j<f
and represents the
solution
that
is
amount
(scaled) total
Bis).
(1.9)
in the system.
Furthermore, such a
referred to as a pathwise solution to the workload formulation (1.1)-(1.4), in
minimizes the objective for
it
work
of
defined by
Proposition
1.
When
c
Z;{t)
=
=
all
times
with probability one.
t
the solution to (1.6)-(1.8)
0,
Aillill for k
=
is
and t>0.
1,...,A'
(1.10)
P
Proof.
Since the objective function
straints are linear,
it
TT*
that satisfy (1.7)-(1.S)
.^
'-il^-^^Z,
H
may
(1.10).
I
Thus,
when
Brownian
c
for example).
=
0.
nrrik
l,....K,
(1.11)
Zi
=
Ofor
;•
=
(1.12)
1,....A'.
a solution to (1.7)-(1.S), (l.ll)-( 1.12)
limit, the
is tt'
queue lengths of the various classes are
c
Thus, our analysis suggests that the
=
0.
FCFS
sojourn time variance in single server, multiclass queues.
Johnson
FCFS
policy
It
is
[13]
is
policy
is
when
c —* oo,
Harrison
[7]
=
and
in direct
and Peterson
[20]
policy in the heavy
effective in reducing
encouraging to note that
our analysis concurs with a related result using exact methods (see Groenevelt
In the limiting case
suffi-
These conditions are to find
have shown that this same proportionality also holds under the
limit.
and the con-
^^
proportion to their respective arrival rates when
traffic
>
Karush-Kuhn- Tucker conditions are
=
_^Y^h.,m,>Oi.rk
Xj
—)
verify that
in the
[1],
c
and
^k
c+
Readers
convex for any value of
follows that the first-order
cient conditions for optimaJity (see Avriel
Z; and
is
[4]).
shows that the proposed sequencing
the shortest expected processing time rule, which again concurs with exact results
7
(see, for
example Klimov
When
[IS J.
<
1.11
)-(
This solution Z*
1.12).
for Kleinrock's delay
Sargeant
[30] offers
we propose the following procedure
in Kleinrock [17],
to
and then the unique parameters
dependent discipline (see Kleinrock
workload vector.
will achieve this
oo,
a unique value of the unsealed workload vector
will yield
by the conversation law
in steady-state
<
First, find the solution {Zl{t).z') to (1.7)-(1.S),
obtain an effective sequencing policy.
(
c
[16]-[17])
can be derived that
Wood
In particular, the synthesis algorithm of
a simple iterative algorithm (where a quadratic equation
is
and
solved at
each step) to derive the necessary parameters (see also Federgruen and Groenevelt
[3]
for
a generalization of this algorithm).
2
A
Closed Network
For the networks in this section and the next section, we will index single server
stations by
i
=
1.2.
customer classes by k
Since a different customer class
stage of completion,
we have
is
>
A'
new customer
is
with probability
^/t-
_;.
The
whenever one
independent of
j
=
1
J.
Let t(j) be the set of classes that correspond to a
J.
total population size of the closed
always maintained at
into the network
and customer types by
A',
1
defined for each combination of customer type and
particular stage on the route of type
considered in this section
=
all
A',
exits.
and
tliis is
network
achieved by releasing a
The new customer
previous history, where ^jt=i ^t
will
=
1:
be of class k
alternatively,
entering customers can be chosen according to the mix Qk in a deterministic fashion, and
the only change in the analysis
Of
course, qk
type's route.
>
the covariance matrix of the underlying Brownian motion.
only for those classes that correspond to the
We
with probability
is
will also let qj
=
stage of some customer
X]*:gr(i)9*' ^° ^^^^ entering customers are of type j
q^.
Recall that each customer type has
the network.
first
In the
its
own
arbitrary deterministic route through
workload formulation of the Brownian control problem, the routing
information
time
captured
is
at station
1, ..., /,
server
i
station
define
v,
for a class k
i
=
^jt=i
i
it
=
tt} for
i
=
is
=
p2
and
A'
A'|pi
1,...,A'
=
1,2.
P2I
is
>
t
and
0,
.\h
B
conditions
of a sufficiently large integer A' such that the
of
moderate
size;
a representative example
is
queue length process and server idleness process need
U,{t)
= I{N^t)/N
= PiMik - PiMik
Propositions 2 and 7 in Harrison and Wein
pressed as choosing
traffic intensity p, for
Then the balanced heavy loading
one-dimensional Brownian motion process with
By
=
the expected total time over the long run that
time by the population parameter
this
and
—
i
I.
in the previous section, the
be rescaled.
to
.
network assume the existence
10 and pi
As
customer exits the network. For
until that
A/it9/t. so that r, is
to be r,/ max{i']
total population size
=
customer
the expected remaining processing
is
devotes to each newly arriving customer. Define the relative
for the closed
A'
the quantity A/,i, which
in
RCLL
for
drift
for k
[9],
=
z
fx
Let Zkit)
A'.
1,2
and
t
=
Qk{N''^t)/y for
>
0.
and variance a^ and
,
=
Let
5
be a
let
l,...,K.
(2.1)
the workload formulation can be ex-
processes {l\,U2. Zk) that are nonanticipating with respect to
such that
K
Y^
*:
=
MkZkii) = B{t) + p2U,{i) - p:U2{t)
=
number
(2.3)
>
for
A-
=
1,...,A'
andfor
all
t
>
mean
0.
=
and
L'2(0)
(2.4)
=
of customers exiting the network per unit of time
and Zt(oo) denotes the scaled vector queue length process
formula, the
(2.2)
0,
forallf>0,
l
Ui and U2 are nondecreasing with t'i(O)
the
>
i
Z;t(^)
If
t
1
K
J2Zk{t) =
k
for all
rate of the network
9
is
is
(2.5)
A over the long run
in steady-state,
steady-state sojourn time of type j customers
Even though the throughput
0.
then by Little's
is -E'[^;te'-(7)
^kioo)]/qjX.
unknown, we can express our
bi-criteria
objective as
T
—E
minlim sup
.c-.,r,../
T
T—oo
In the limiting case c
for details)
is
—
J
J
>:>,,5ii:^-5-^,..
ex;,
the solution to this problem (see Harrison and
—
sup
(2.6)
Wein
[9;
to choose
U'{t)
=
-B(s) + p,U2{s)]^,
[a'
and
(2.7)
P2 0<j<(
l-{t)
=
-
+
sup [B{s)
p2U:{s)
-
6-]+,
(2.8)
P\ 0<s<(
+ p2U\(t) — pil'2i'f )'!: >
SO that B{t)
ian motion (abbreviated by
[a', b'].
and
The
see Harrison
[6]
interval endpoints are defined by a*
<
<
a*
RBM;
a one-dimensional reflected (or regulated)
0, is
b'
for a
=
Brown-
complete treatment) on the interval
mini<t</^-
Mk
and
b'
=
maxi<i..<^^- A/jt,
Definine;
o
.
\V{t)^B(t) + p2U'{t)-pd'''t).
and assuming (without
loss of generality) that the classes k
maxi<k<h- -^h = AA and mini<t<K-
Z:{t)=
Mk =
{
f
>
0,
7(0
\-lit)
—
in the single
queue
case,
{Z',U')
is
resulting sequencing policy (see Harrison
(Z*, U'))
is
A' are ordered so that
ifk
=
l;
ifk==2:
=
3
for all
^
(2.10)
K.
where
',(t)=—^
0*
As
1
A/2, then
ifk
for all
=
(2.9)
to
rank each customer class k
priority at station
1
—
>
0.
(2.ir
a'
a pathwise solution to problem (2.2)-(2.6).
and Wein
=
1
A'
[9]
for
The
an interpretation of the solution
by the index A/*, and to award higher
(respectively, station 2) to the classes with smaller (respectively, leirger)
values of this index. Notice that this policy awards
10
bottom
priority at each station to the
class that has a positive scaled
heavy
traffic limit
Now
values
TV'
let
queue length, thus maintaining consistency with existing
theorems: see. for example, Whitt
us analyze the other limiting case,
such that there exist Zi
[29],
when
c
Harrison
=
0.
It
[5".
is
and Reiman
[2'.[.
clear that the set of
Zk satisfying
K
W=
K
Y^^'hZk,
(2.12)
.
priority bracket.
as
when
—
c
Within the higher
oc: this
ranking maintains the
simple dynamic policy (that
to
priority bracket, classes are ranked in the
spirit of
same manner
minimizing mean sojourn time.
be illustrated in the example in Section 4)
will
is
attempt to maintain the actual queue lengths of the lower bracket classes
A
employed
same
in the
1
Now
let
and Z
Z"
relative quantities as
.
solution {U\,U2) for both limiting cases (see (2.6)-(2.7)
special
<
us consider the general bi-criteria case where
form (they are referred
imply that VV{f)
in (2.9)
a
is
cc.
RBM
on some closed
when
b will satisfy
c
—
and
oc,
»
[a,fe].
<
a'
[a°, b^]
a
It is
<
a'^
6°
<
6
Proposition
results (see
<
(
<
clear that for
and
[S])
and
will restrict ourselves to
6*.
Chapter 5 of Harrison
[a.b],
Tj
c
,
)
will
cxd,
the
L't
<
where
characterizes the solution
For a control limit policy {L'\,U2) characterized by the interval
two propositions are well-known
and Taksar
be justified shortly), so that a pohcy
be characterized by a particular closed interval
optimal interval endpoints a and
We
interval.
Notice that our
(2.16)-(2.17)) are of a very
to as control limit policies in Harrison
this class of policies (this restriction will
characterizes the solution
and
<
c
when
[a', 6*]
c
=
0.
the following
[6]).
2.
lim -E[l\{T)]
•'
"=*
=
(2.18)
:
and
Hm
-E.[U2iT)] =
T-ocT
where v
=
"'
'
(2.19)
\
lip,=P2,
[j[b^)
2id/a^
Proposition
3.
distribution on [a,b]
U
if pi
W(i)
=
p2,
is
a
RBM
on
[a,b].
then
W
has a uniform steady-state
and otherwise has a truncated exponential steady-state
distribution with density function
</(r-a)
p{x)
=
—
-—
for a
^
12
<
X
<
6.
(2.20)
These results allow us to analyze
(2.2)-(2.6)
by considering the quadratic program
2
^
-5ti:(%^-%^)
"
m"
"
"
~
^_'"'
'
(221.
K
subject to
^A7jtZjt
=
U',
(2.22)
1.
and
(2.23)
K
Zk
Y^
h=
=
i
Z*>0,fort =
We
as a function of the righthand side value \V.
\Z^CZ, where C
(see
Dom
[2]j is
is
A',
(2.24)
will
abbreviate the objective (2.21) by
l
The dual
a postive semidefinite matrix.
to choose (Zi,
...,
Z^-,
tti, 7r2)
to
max- -Z^CZ-H'tt,
subject to
where
M
= {M\
Mk)'^ and
convex and the constraints
(
e
=
CZ (1
.U-i
1)-'^.
-
c^ttj
-772
(2.25)
>
(2.26)
0,
Since the objective function in (2.21)
2.22 )-( 2.23) are linear,
it
follow^ that there
is
[qq. bo].
By
6'].
the convexity of h(\V),
Also, h{VV) achieves a
it
minimum
of zero
is
convex with
on the interval
follows from Taksar [23] that a control limit
pohcy
indeed optimal for (2.2)-(2.6). Thus, under the policy characterized by the interval
the value of the objective function (2.6), which
-6
Our
6°
<
6
<
we denote by
=
0,
except use the interval
[a, b]
<
a
<
a° eind
we propose to proceed exactly
as in
derived from the solution to (2.27) in
place of the interval [a°,6°] derived from (2.12)-(2.15).
13
[a.b],
hUh^e^-'^
In order to develop a sequencing policy,
the limiting case c
is
f{a,b). will be
solution can then be found by minimizing f{a,h) subject to a*
6*.
is
no duality gap.
Furthermore, the dual objective function (2.25), which we denote by h{\V},
respect to \V on the interval [a*.
program
of this quadratic
3.
A Network With
Controllable Inputs
The network considered
in this section is identical to the closed
manner
the previous section, except for the
network described
which customers axe released into the system.
in
>
Here, customers are endogenously released according to the control process {N(t).t
where N{t)
is
is
number
the
of customers released into the
is
at least A.
The mix
network up to time
number
a constraint that the long run expected average
network per unit of time
i",
= ^^-1
I
=
p.
The balanced heavy
now
1,2, but the traffic intensities are
=r, A
for
=
2
=
—
p,)
is
positive
0{t)
defined by
(3.1)
>
\nt
=
i
{Ui,l'2) as in Section
.\(nt)
-,
t
>
1.2.
0.
(3.2)
idleness process
Wein
(see Section 3 of
processes (U.Z.9) that are nonanticipating with respect to
—E c[
'
The workload formulation
1.
=
by
0}
^—
-
size for
and define the scaled queue length process Z = {Zk) and scaled
minlimsup
T—oo
in Section 2,
1,2.
and of moderate
Define the scaled input process {6{t).t
RCLL
As
(<?/t)-
network
loading conditions for the network assume the existence of a large
integer n such that y/n{l
choose the
There
t.
of customers released into the
again exogenously generated according to the product mix 5
for
0}.
of customers departing the
is
^^Itk
in
Y^z,it)dt-,\[ y:y.
- -^O
.=
/t=l
1
;
=
1
U =
[26]) is to
B
to
dt
^
^'
'^J
(3.3
subject to
Y^M,kZk[t) = B,{t)^l\{t)-v,e[t)
limsup-£[L^(r)]<o.
r— oc
Zk{t)
>
for
J
=
for all
^
>
and
1,2,
.
e
=
1,2.
(3.4)
(3.5)
J
for
Jt
=
1
A'
and
for all
t
>
Ui and U2 are nondecreasing with C'i(O)
14
0,
=
and
t''2(0)
(3.6)
=
0,
(3-7)
£
where
B
As
is
a two-dimensional Brownian motion and
Wein
in
[25]. this
=
yjn{\
problem can be cinalyzed by solving
terms of the control process
f,
-y,
U
.
we can
In particular,
—
p,),
=
i
1.2.
for the control process
solve for
Z by
Z
in
solving, at each time
the following quadratic program:
k
=
H)
^'
~ 1=1 }=\ ^
\
/
K
subject to
^A/iZjt(0 =
+
-B(0
P2t'i(0-pi^'2(<)for
>
t
(3.9)
0,
k-\
Zk{t)>QAov
where
A/jt
is
=
k
defined in (2.1), and B{t)
Brownian motion with
drift
=
p2Bi{t)
p and variance a^
.
- piB2(t)J >
At each time
which
different values for the right side of (3.9),
function will be abbreviated by c'^Z(t)
(3.10)
A'.
\
is
f,
0, is
a one-dimensional
this quadratic
again denoted by \V{t).
+ ^Z{t)^CZ[t), where
the matrix
program has
The
C
objective
is
positive
semidefinite.
The dual
of this quadratic
program
max
subject to
Once
again, there
is
Given an optimal value
1*2
and
7r(f
)
to
-\z^CZ + \V7:
\Itt-CZ<
minimum
(3.11)
e^c.
(3.12)
RCLL,
is
convex
of zero at zero.
of Z'{t}, the following constrained singular control
then solved: choose nondecreasing.
and
to choose Z{t)
no duality gap, and the optimal dual objective function h{\V)
with respect to \V and achieves a
L'l
is
problem
is
nonanticipating (with respect to B) processes
to
.T
min
limsup—
T — ex;
subject to
\V{t)
hi\V{t))dt
(3.13)
-i-
=
B(t)
+
p2U\{t)
15
-
p\U2{t) for
t
>
0,
(3.14)
.
hmsup— £x[fT— oc
=
i(r)]
limsupi£.[r2(r)] =
r— oo
if
B
has drift p
^
0-
=
p2. the
—
pi
).
are replaced by y/npi(l
P\
5
is
driftless,
-
P2
ILlMf,
-1
If pi
(3.1o)
.
p\
J-
-
and the
(3.16)
p2
right sides of (3.15)
and
(3.16)
Let us summarize the solution procedure to the workload formulation (3.3)-(3.7).
Brownian motion B. from which can be observed the
controller observes a two-dimensional
B=
one-dimensional Brownian motion
P2B1 — pxBj- The solution (Z' ,U' ,6*)
is
given by
the solution Z' to the quadratic program (3.8)-(3.10), which depends on the process
the solution
V
e\t)
We now
Brownian control problem
to the
(3.13)-(3.16),
W
and
K
v;^\Bx{t) + Vl{t)-^Mxi,Zl{t)] foralli>0.
=
The
(3.17)
turn to solving the constrained control problem (3.13)-(3.16). In W'ein
[25].
a Langrangian approach was used to put the constraints (3.15)-(3.16) in the objective
function (with multipliers
c
—
»
oc.
By Theorem
r
6.2 of
and
Wein
/
and
for (3.15)
the following conditions are sufficient for optimality
[25],
of (3.13)-(3.16). Let the infinitesimal generator
\
Proposition
4.
Suppose
Mm
(3.16), respectively) for the limiting case
.
F
B
be given by
d
(f
(y, V'(j:), r,
of
/,
a, 6) satisfy
{TV{x] + h{x)-g,r + V'{x)J-V'{x)] =
V{0]
=
TV{x) + h{x)-
= -r
V'{x)
=
I
(3.19)
(3.20)
0,
V'(x)
0.
g
=
for J
for I
<
>
for a
<
X
<
6,
(3.21)
(3.22)
a,
(3.23)
6,
16
limsup
— £j:[t'i(^)] =
hmsup-^r
r-oc
2li
f
;j
=
J
and
.
-
P\
(3.24)
(3.2oj
,
P2
where
ri(0 =
—
sup [a-B(5)
+
piJ72(3)] +
and
,
(3.26)
P2 0<ir<(
=
[-2(0
Pi
Suppose
V
€
C^ and
sup [B(6)
to the constrained
Following Section 7 of Wein
[25].
satisfied
In particular. Proposition 2
with equality
if
and only
if
I
Proposition 3
is
and
A'2
such that V'(x)
problem (3.13)-(3.16)
we use Propositions
a candidate solution to (3.13)-(3.16). which
6*.
is
is
and 3
2
is
<
A'l
+
Nohii).
(3.26)-(3.27).
in Section 2 to develop
characterized by the interval endpoints a*
used to show that constraints (3.15) and (3.16) are
the interval width satisfies
ifp.
2v^p:(i-p.)
then used to show that the objective (3.13)
to minimize /(a),
(3-2")
p2^7(^)-t]'^-
there exisf constaiits A'l
Then the optimal pohcy
and
+
0<3<(
=P2.
is
minimized by solving
for a*
where
2^p,(\-p,)
I
Given the candidate policy
the optimality equations
is
^^
lfpi^P2;
J^°+:y?,;u-„) /^(j)^j
ifpi=p2.
^
f(a)=Ua
'
(a*. 6'), the
(eM^-^^-l)
obvious cemdidate for the gain g* that
(329)
satisfies
the optimal long run expected average cost function of the
Lagrangian. or
S-
=
//l<'-)
l/(G')
The
+
+
'f"'^^^^
^7f^ + ^Jf^
(r
+
(3.30)
/)v/^pi(l-pi)
potential function V''(x) and the multipliers r*
equations can then be found as in Section 8 of Wein
17
\ip\=P2-
and
[25].
A
/'
that satisfy the optimality
closed form solution {Ul, V^)
to the constrained
Hmitinp case
<
c
<
—*
c
problem (3.13)-(3.16) and a proof
The
:>z.
solution to f3.29)
oc (a numerical example
of optimality
more difncuh
is
in
given in
is
[25] for
our general case
the
v.-here
carried out in the next section), and the verificacion
is
of optimality needs to be done on a case-by-case basis.
Now
us interpret the optimal solution to the workload formulation in terms of
let
the original queueing system.
(3.11)-(3.12) yields the
Ck{t)
=
c
The
solution {Z*{t).n'{t)) to the dual quadratic
dynamic reduced
+ {CZ')k{t)-
where {CZ')k(t) denotes the
^-th
program
costs
MkT^'{t}
for
k
=
and
A',
l
element of CZ'{t). This
v-alue
<
>
(3.31)
0,
measures the increase
in
the objective function of problem (3.3)-(3.7) per unit of increase in the righthand side value
of the nonnegativity constraint Zk(f)
costly
it
is
>
0.
Thus, the higher the value of
to hold a class k customer in queue at time
policy that awards higher priority at time
costs Ck{t).
If
to zero, then
more than one
class at the
we use the tie-breaking
rule
t
t.
As
in
Wein
[26].
to the classes wi'h the higher
same station have
proposed
in
Yang
a
we propose
and
the
dynamic reduced
dynamic reduced
^31]
more
Ck{t). the
cost equal
also described in
Wein
[27].
The proposed
input policy
is
to release a
customer into the network whenever the
two-dimensional workload process enters a specific region
R^
.
This region
is
we
defer
4.
its
nonnegative orthant of
derived from the interval endpoints [a'.b'] and from the solution Z' of
the quadratic program.
so
in the
The
policy
is
most easily described with a concrete example, and
description until the next section.
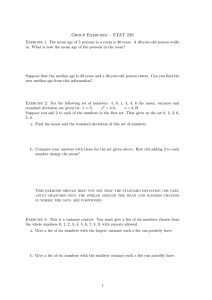
An Example
We will
illustrate the
displayed in Figure
1,
procedure described
which
are two customer types,
.4
%s
.^
first
in Sections 2
studied in Harrison and
and B, and type
A
18
and
3 with the simple
Wein
[9]
and Wein
example
[26].
There
customers have two stages on their route,
while type
will
B
customers have four stages. Thus, there are
be designated (and ordered from k
=
6)
by
customer
.41. .42.
all
times for
six classes are displayed in
Figure
1.
The
classes,
SI. B2. S3, and
processing times are assumed to be exponential, and the
concreteness,
all
1
six
mean
specified product
(1/2.0, 1/2,0,0,0), and customers are released into the network in the order
4
A
STATION
B
8
1
and they
B-i.
For
processing
mix
is
q
=
ABABAB...
Turning now to the limiting case
isfying (2.12)-(2.15)
which
is
B3
the solution
0.
at station
1
and
class
Bi
it
=
U'
=
Z*
is
0,
can be calculated that the interval
[a°. 6°] sat-
=
contained in the interval [a'.b']
strictly
is
When
calculated from (4.2).
and when \V —
class
[-6.0], which
is
=
c
-6. the solution
is
=
Z""
[-11. 3\
(0.1/2.0.1/2.0.0)
(1/2,0,1/2,0,0,0). Thus we give top priority to
at station 2, since these classes are in the higher priority
bracket.
In order to decide
how
award
to
number
Z"
and Z^
two
classses. call
the classes that are in the lower
dynamic scheme
priority bracket at each station, a simple
the
among
priorities
used that attempts to keep
is
of customers in queue of each class in the relative proportions dictated by
.
For simphcity. we will describe this heuristic in the case where there are
them
classes
and
1
2, in
the lower priority bracket of a given station.
Let Z] and Z2 be the positive values of these classes from the solution Z"
idea behind the heuristic
Suppose
Zo).
Zi/(Zi
-f
class 2
customers
begin serving a
p{t)
and a
in
is
at
to keep the proportion of class
time
If
in
1
—
+
=
-
'
Z,i
heuristic
p{t)
<
0,
customers and (5:(0 >
is
to serve class
and serve
class
1
1
ready to
customer with probability
1
made, the
is
(4.3)
1
-f
Z2) and solving for p{t) yields
(4.4)
'
-\-
Z2
customers
at
time
i
if
Returning to our example, from the solution Z"
and B2
20
>
p(/)
customer with probabihty p{t)
to keep the queue lengths of classes ,42
is
il-p{t])Qiit)
Setting this equal to the desired proportion Zi/(Zi
p{i)
class
The
.
+ Q2{t)-l
Qi(t)
if
1
p(t), then, after the choice is
queue that are of
p(f)lQi{t)-l)
customers
class
the server serves a class
customer with probabiUty
expected proportion of total jobs
The dynamic
>
Z*"
queue to be
in
queue, and the server has just completed a service and
new customer.
class 2
there are Q\(t)
t.
customers
1
and
(respectively,
(respectively, .41
if
Z
serve class 2
1,
p{t)
),
it
and Bl]
G
(0, 1).
is
desirable
at station 2
(respectively, station 1) as equal as possible,
When
takes on a particularly simple form.
;4.4'i
processing at station
Bl customers when
Similarly,
when
1,
we serve
Qzit)
>
is
54
<
c
B3
customers are available
<
52
when
(or flip a fair coin)
customers in queue at station
^'^^ serve
For the general case where
(2.25)
and alternate
Qi(t).
customers when QafO > Qii^)
no class
heuristic described in
customers when Qiit) > Qiit) and serve
class .41
there are no class
and thus our dynamic
class
we
2,
customers when Qiit)
there
is
for
class
a
tie.
serve class .42
>
Q2{t)-
optimal dual objective function h{\V)
oo, the
in
given by
r(6±H:)2
h{\V)=
I
[^
and thus f{a.b}
if
iVe
if
Vi'6 [-6,0];
[-11.-6];
(4.5)
ifU'€[0,3],
given by
is
,
/(a,
,
6)
=
-
__—
jgQ2
/ca2
+ _-_-_
(_
— a
1
\
2
63
q3
2t
(0
216n
;^08a
lO
to
to
,,^^
(4.6)
.
/
Therefore, our optimal interval endpoints can be found by minimizing f{a.b) over a €
[-11,-6] and
Now
let
be
us consider the numerical example in the context of a network with con-
trollable inputs.
unit of time
[0,3].
If
we choose
a long run average throughput rate of .1286 customers per
=
and choose the scaling parameter n
100, then p\
{Z'[t).-*{t)) to the dual quadratic program (3.11)-(3.12)
namic reduced costs (3.31) are given
costs have
tables),
in
Table
P2
The
-9.
given in Table
I,
is
and the dy-
=
I
-4 + ft^
[cHl
it
follows that b'
-
a'
=
+
Vr(f).
in the
two
The optimal
given by
r_i^_£»:
h(\V)
solution
In each of these tables, the solution and
II.
depending upon the value of the workload imbalance process
(3.28),
=
been broken down into three regions (corresponding to the columns
dual objective function h{\V) in (3.11)
By
is
=
ivl
<
if
Tr
-55c/12;
if
W e [-55C/12.0];
(4.7)
if^V'>0.
6.072, which
^^^^.Ic-k+^lc' +
-^k
21
we
lck
will
if
denote by
ce
k.
[0,6^35];
iic>6k/3o.
Solving (3.29) yields
^^ g^
\V(t)<-5oc/12
\'ARIABLE
\V(t!>0
\V(t) e [-boc;i2.0]
\V(t)
Z'(t]
z;{t)
^Ay^)
12
"^144
^
11
^5(0
Z;{t)
"i'j
TABLE
Solution to the Dual Quadratic Program (3.11)-(3.12).
I.
In order to interpret the solution to the
(4.Sj. let us consider the limiting
example
c
workload formulation given
—
•
analyzed in Wein
CC'
verify that the solution derived here in the limiting case
in Section 7 of
Wein
to consider in Tables
3''"9
12111
6
[26].
and
I
In this case, there are only
II,
and
is
it
the dynamic reduced costs in Table
II
is
all
classes
any time
t
<
0).
From Table
1,
we
two regions
(i.e.,
process defined by W,(t)
=
positive.
Ylk-i -^UkZkif) for
?
=
and
may
two columns)
sequencing policy based on
M^
by the index
see that only one
and only two components are ever
readers
[26];
serves the class with the smallest (respectively, largest) value of the index
(respectively. \V(t)
I
identical to the solution found
easily seen that the
ranks
Table
in
component
of
in (4.2),
when
Z'
\V{t)
and
>
positive at
is
Thus the two-dimensional workload
1,2
and
t
>
0,
stays on the
of a cone in the nonnegative orthant of R'^. Furthermore, the interval [a*, 6*],
boundary
which equals
[-4.771, 1.301] by (4.8), determines cutoff points on the cone boundary beyond which the
workload process
may
not enter (see Figure
process 9{t), which can
(3.4)), is
move
either
2).
As explained
in
Wein
way along the 45 degree direction
[26],
in Figure 2 (see
used to keep the workload process on the truncated cone boundary
90
the control
in
Figure
2.
Thus, when the workload process
then exertiiig
input rate
in the region to the
lower
left
of the truncated cone.
corresponds to releasing more jobs into the system relative to the
\V(f)
< -ooc/U
\V{t) e [-55C/12.0]
W{t) >
2c
11
3
3
Bl
^
^
- -^^^^
B2
DO
^•^
nonii:.;;!
A.
CLASS
.41
c'
is
2c
+
i|^
_
C
2c
tc
1
1
4c
i^>t
1
I
')
Ti
81V'(()
9
'
8c
3
lOc
iililll
4Vr(0
I
9
'"
1
BVV(t)
throughput rate
simulation run that appears later in this section.
in the
A more
detailed
explanation that interprets the solution (Z' ,U' ,0') of the workload formulation
(3.7j in order to obtain the
be found
in
Section 6 of
(3.3)-
workload regulating release policy denned by (4.9;-(4.12j can
Wein
[26].
W
2
w
Figure
For the case
when
<
c
2.
The
<
oo, the
the dynamic reduced costs in Table
11,
complicated. In the limiting case
=
c
release region
when
c
—
>
ex:.
sequencing policy can easily be calculated from
but the determination of the release policy
0,
equation (4.8) implies that
24
[a', 6']
=
is
more
[—6.072,0]
and thus W(t)
that Z'(i)
line ~\V\it)
=
will
Zl{t^
= U2(f
to release a job
always be
=
j.
in the leftmost region in
-\\'lf ]/l2.
The
is
I.
From
this table,
and so the workload process stays on
release policy in this case (see
Wein
[26] for
it
follows
a segment of the
an explanation)
is
whenever
u'2(0
which
Table
pictured in Figure
3.
<
"1
Once
and 7u'i(0 - u'2(0 <
again,
e
=
1
6e,
(4.13)
achieved the desired throughput rate
in
the simulation experiment.
W
2
w
Figure
When
<
c
<
oo,
3.
The
release region
then the release region
25
will
when
c
=
0.
be as pictured
in Figure 4.
The
slope
of the lower ray
formed by a
another
is
1/4. just as
line that
line that
is
it
in
Figure
The upper shaded
region in Figure 4
ha? a slope of 13/2 (the same as the upper ray
has a slope of 7 (which
intersection of these two lines
of the regions in Table
2.
is
at VVit)
upper ray
parallel to the
is
= — 56c/12,
which
is
in
in
is
Figure 2) and
Figure
3.)
The
the cutoff point between two
I.
W
2
Slope
=
7
Slope
=
13/2
Slope
=
1
/4
w
Figure
4.
The
release region
Before turning to the simulation results, there
to the scheduling policies described earlier.
queue length processes are
zero.
Due
when
is
<
<
oc.
one refinement that has been made
Notice in Table
to the rescaling,
26
c
Z
II
that
many
of the scaled
measures how many tens
of
customers are
for the
network. This measurement
in the actual
customers who are
in service, arid so
we propose a
Z
sojourn time \'ariance that essentially reinterprets
in
queue, not including the customers in service.
of the time,
A
and we
customers
slirht
will
in service
denote this by p
—
will
it
From Figure
.9.
refinement to the surrogate
This refinement
For this numerical example, each server
number
is
1,
in
terms of the
be utilized about 909c
to
the
B
of customers
will hopefully cause a
be described
5p/14 and the mean number of type
is
The refinement changes
23/?/14.
obviously too crude to account
as only the scaled
reduction in the surrogate sojourn time varicuice, ajid
numerical example.
is
mean number
customers
of type
in service
is
the surrogate sojourn variance from
2
Z,(0 +
Z.(t)
Z^it)
+
Z,ii)
+
+
Z,(t)
Zeit]
(4.14)
1/2
V
in (2.21)
and
(3.S) to
Z,(i)
+
^
+
Z2(t)
2
Z^{i)
+
Zi{t)
+ Z5{t)^Zeit)^^
(4.15)
1/2
V
in (2.21)
1/:
1/2
and
+
Ziit)
Z2(t)
+ jf^
Z,it)
+
Z,{t)
+
Zs{t)
+
Ze{t)
+
-^
(4.16)
1/2
in (3.S). In
1/2
our simulation experiment, this refinement was only analyzed for the case
in the closed
network. This
in the analysis
is
is
c
=
a particularly easy ccise to evaluate, since the only difference
to change equation (2.15) from
Z,
+
Z2
- Z3 - Z4 - Zs - Ze =
(4,17)
to
Zi
A
+
Z2 - Z3 - Z4
-
Z5
-
Ze
=
^.
(4.18)
simulation experiment was performed to assess the effectiveness of the analysis
presented in Sections 2 and
3.
Two
conventional policies, which consist of a customer
27
DET
input (abbreviated by
in the
order
One
priority sequencing policy, were tested.
and a
release policy
ABABAB....
in
Table
where customers are released
III),
paired with
policy was deterministic
FCFS
2
was
described in equation
3,
which
FCFS. The
closed
also tested in conjunction with the sequencing policies derived in Section
under the two limiting cases,
Section
inter^.-al-
sequencing, and the second was closed loop
input (CL). where the total population level was held constant, and
release policy
constant
at
will
(4. IS).
c —* oc
The job
and
c
release
be denoted by \VR
(for
=
The
0.
and
c
=
policy used the refinement
priority sequencing policies derived in
workload regulating), were also tested under
the two limiting cases.
In order to allow for a comparison of the various cases,
and
e
so that each policy achieves the
was chosen
of SS.97t.
same average throughput
to be .127 customers per unit of time,
Due
rate,
set the
which
parameters
.V
for convenience
which corresponds to a server utilization
to the discrete nature of the population parameter .V,
able to obtain this target rate e.xactly. In such cases,
of the various
we have
we were not always
we havo reported hnear interpolations
performance measures so that the average throughput rate would be
.127.
For each policy tested. 20 independent runs were made, earh consisting of 5000 customer
completions axid no initialization period. The mean sojourn time, the actual sojourn time
standard deviation (as opposed to the surrogate sojourn time standard deviation), and the
mean throughput
rate, along
with 959c confidence intervals are recorded in Table
Referring to the results in Table
III,
it
is
seen that the
(DET, FCFS)
III.
policy achieved
a sojourn time standard deviation that was twice as high as most of the other policies,
implying that job release has a large impact on the sojourn time variance. Of course,
many manufacturing
onto the shop floor
are referred to
is
in
systems, the amount of time a job spends waiting to gain entrance
also of importance,
Wein and Chevalier
[2S] for
and that time
is
ignored in this study; readers
a scheduling study where this time
is
taken into
account. Minimizing the surrogate sojourn time variance appears to be am effective means
of reducing the actual sojourn time variance, since the two c
28
=
cases reduced the sojourn
time variance relative to the corresponding
c
—
»
oo cases.
The (CL.c =
0) case achieved
the lowest sojourn time variance, perhaps in part because of the refinement described in
(4.18).
SCHEDULING
a simultaneous reduction in the
mean and
variance of the sojourn times. Furthermore, a
large reduction in sojourn time variance relative to the (CL.c
On
the other hand, consider our same example, but
times for the six classes from
using this
to type
new data
B
set as
—
now change
(4, 1. 8. 6, 2, 7) to (2, 6, 4, 1, 8, 7);
example
2.
Now
the (CL,c
—
»
oo) case
we
and
is
larger than the
(CL,FCFS)
case.
mean
processing
oo) policy awards lowest priority
Therefore,
is
now
very large for
we might expect
difference in sojourn time variances between the two cases (CL,c
will
not possible.
denote the example
will
products at both stations, and so the surrogate variance
this policy,
the
is
—
*
oc)
that the
and (CL,c =
0)
be larger than for our original example.
MEAN
SOJOURN TIME
VARIANCE OF
SOJOURN TIME
MEAN
THROUGHPUT
CL.FCFS
71.6 (±.36)
31.6 (±.22)
.127 (±.0007)
CL,c-^oc
52.8 (±.21)
37.9 (±.21)
.127 (±.0007)
63.8 (±.24)
23.2 (±.20)
.127 (±.0007)
SCHEDULING
POLICY
CL.c
=
TABLE
IV.
Simulation Results for Example
2.
Simulation results for example 2 are displayed in Table IV. As expected, the sojourn
time variance for the (CL.c
—
>•
oc) case
is
larger than the
(CL.FCFS)
case,
and there
a large diffeence in sojourn time variance between the two extreme cases of (CL,c
and (CL,c
=
0).
Thus, relative to the (CL,c
variance can be achieved while incurring a
time.
—
mean and
somewhat moderate increase
in
effective at
minimizing sojourn time variance
some aid
in
oo)
mean sojourn
=
0) policy,
variance of processing times relative to
Perhaps the most interesting result from
>
oo) case, a large decrease in sojourn time
Also, as in the original example, example 2 offers a policy, the (CL,c
that simultaneously reduces the
offers
»
—
is
this
in
study
is
that
FCFS
is
FCFS.
not particularly
complex queueing systems. This paper
developing release and sequencing policies to reduce the sojourn time
30
variance in such systems.
31
REFERExNCES
[I]
Avriel.
M. (1976). Xonlineeir Programming: Analysis and Methods. Prentice-Hall, En-
glevvood
New
Cliffs,
Jersey.
[2]
Dom, W.
[3]
Federgruen, A. and Grownevelt. H. (1988).
S. (1960).
Customer
Duality in Quadratic Programming. Q. Appl. Math. IS. 155-162.
Classes: Characterization
M/G/c
Queueing Systems with Multiple
and Control of Achievable Performance under
Nonpreemptive Priority Rules. Management Science
[4]
Groenevelt. H. (19S9). Private Correspondence.
[5]
Harrison.
J.
M.
(
1973).
A
Theorem
Limit
for Priority
9,
1121-1138.
Queues
in
Heavy
Traffic. J.
Appl.
Prob. 10, 907-912.
[6]
Harrison.
M.
J.
(19S5).
Brownian Motion and Stochastic Flow Systems. John Wiley
and Sons, New York.
[7]
Harrison.
M.
J.
(1988).
Customer Populations.
Brownian Models
In
of
W. Fleming and
Queueing Networks with Heterogeneous
P. L.
Lions (eds.). Stochastic Differential
Systems. Stochastic Control Theory and Applications, INLA Volume
Verlag,
[S]
New
Harrison.
York, 147-186.
\L and Taksar, M.
J.
Math. ofOper. Res.
[9]
Harrison,
J.
10, Springer-
3,
I.
(1983). Instantaneous Control of
Brownian Motion.
439-453.
M. and Wein,
L.
M. (1989). Scheduling Networks
of Queues:
Heavy
Traffic
Analysis of a Two-Station Closed Network. To appear in Operations Research.
[10]
Jackson.
J.
R. (1960).
Res. Log. Quart.
7,
Some Problems
in
Queueing with Dynamic
Priorities. A'avaJ
235-249.
[II]
Jackson,
J.
R. (1961). Queues with
[12]
Jackson,
J.
R. (1960). Waiting
Dynamic
Time
Priorities.
A/anagement Science
Distributions for Queues with
Na\-al Res. Log. Quart. 9, 31-36.
32
Dynamic
1,
18-34.
Priorities.
[13]
Johnson, D.
cesses
and
Approximations for Optimal Filtering of Jump Pro-
P. (1983). Diffusion
for
Queueing Networks. Unpublished Ph.D.
thesis.
Dept. of Mathematics.
Univ. of Wisconsin, Madison.
(1979). Reversibility
[14] Kelly. F. P.
and
Stocheistic Networks,
John Wiley and Sons, New
York.
[15]
Kingman,
Proc.
[16]
Camb.
C. (1962).
The
Effect of
Queue
Discipline on Waiting
Time
\'ariance.
Phil. Soc. 5S, 163-164.
Kleinrock, L. (1964).
11.
[17]
J. F.
A
Delay Dependent Queue Discipline. Naval Res. Log. Quart.
329-341.
Kleinrock. L. (1976). Queueing Systems Vol.
II:
Computer
Applications. John Wiley
and Sons, New York.
[IS]
Klimov. G.
[19] Little. J.
9,
[20]
P. (1974).
D. C. (1961).
Time Sharing
A
Service Systems
Th. Prob. Appl. 19.532-551.
I.
=
Proof of the Queueing Formula L
X\V. Operations Resesurch
3S3-3S7.
Peterson.
W.
A Heavy
P. (19S9).
Traffic Limit
Theorem
for
Networks
of
Queues with
Multiple Customer Types. To appear in Math. Operations Research.
[21]
Reiman, M. L (1983). Some Diffusion Approximations with State Space Collapse.
Proc.
Intl.
Seminar on Modeling and Performance Evaluation Methodology, Springer-
Verlag, BerUn.
[22]
Shanthikumar,
J.
[23]
J.
G. (1982).
OperationaJ Hesearch
Taksar,
M. L
9,
On Reducing Time
Spent
in
M/G/l
Systems. European
286-294.
(1985). Average Optimal Singular Control and a Related Stopping Prob-
lem. Math. Operations Research 10, 63-81.
[24]
Walrand.
Cliffs,
[25]
J.
New
(1988).
An
Introduction to Queueing Networks. Prentice-Hall, Englewood
Jersey.
Wein, L. M. (1989). Optimal Control of a Two-Station Brownian Network. To appear
in
Math, of Operations Research
33
[26]
Wein,
M.
L.
(1989). Scheduling Networks of Queues:
Station Network with Controllable Inputs.
[27]
Wein,
L.
M. (1989). Scheduling Networks
Heavy
To appear
in
of Queues:
Traffic Analysis of a
Two-
Operations Research.
Heavy
Traffic Analysis of a
Multistation Network with Controllable Inputs. Submitted to Operations Research.
[28]
W^in,
L.
M. and Chevalier,
P. B. (1989).
A
Broader View of the Job-Shop Scheduling
Problem. Submitted to Management Science.
[29]
Whitt.
W.
(1971).
Preemptive-Resume
[30]
Wood. D. and
Weak
Discipline.
Convergence
Appl. Prob.
J.
Sargent. R. (1984).
Theorems
S,
The Synthesis
for
Priority
Queues:
74-94.
of Multiclass Single Server
Queueing
Systems. Unpublished manuscript.
[31] P.
Yang
(1988). Pathwise Solutions for a Class of Linear Stochastic Systems.
Unpub-
lished Ph. D. Thesis. Dept. of Operations Research. Stanford University, Stanford,
CA.
^v/
,uS2
34
Date Due
l-Cfr-
.ib-26-67
MIT
LIBRARIES DUPL
1
IIIIIIIH
3
TDflO
DDS7T111
3