PREFACE:
advertisement

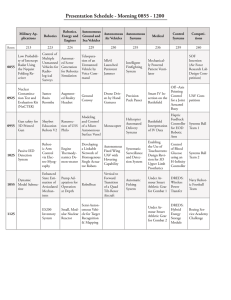
PREFACE: ENGINEERING AND WEAPONS DIVISION Welcome to the United States Naval Academy’s first Annual Capstone Day. Senior Capstone projects provide students with valuable real-world experience that will help them in their future careers, both as military officers, as well as in private industry. Please take /me today to congratulate students and faculty on their impressive achievements. UNITED STATES NAVAL ACADEMY Jay Bi3ng, CAPT USN Chair, E&W Division Thank you to all the sponsors that helped make this research possible. NAVSEA 05 PEO IWS SENIOR CAPSTONE PROJECTS APRIL 24, 2013 8AM — 3PM RICKOVER HALL 2013 SCHOLARS TODAY. WARFIGHTERS TOMORROW. 1 2 Schedule of Events Capstone Morning Session Schedule 0855 Room 0830 – 0845 Welcome & Intro RI 102 Capstone Presenta/ons Rickover (various) 111 Project X: Wireless Network Attack Division Director Address RI 102 1215 – 1300 VIP Luncheon RI Lobby Trident/Bowman Poster Session RI Lobby Aero & Astro Mechanical 1300 – 1500 1500 Poster Session Conceptual Design of a Light 243 Polar Science Program: Artic Weather Probe Balloon Launched AutonoDebris Resistive / Acoustics mous Recovery Naval grid Orbital Naval Sensor Experiment 235 Design & Test of a Ballistic Projectile for the US Navy Railgun Low-Cost Water Desalina- A Hydraulic Regenerative tion System for Developing Braking System for an AllRegions Terrain Vehicle 236 ASME: Remote Inspection Device ASME: Human-Powered Vehicle Team Pumpkin 'Merica 239 Barbecue Smoker: Thermodynamic Analysis Human-Powered Sub Drivetrain Redesign Improved Workstation: Team SAW 203 Autonomous Cruise Control Intelligent Ground Vehicle Autonomous Off-Road Vehicle Navigation 206 Target Tracking Aerial Robot Micro-Blimp Optic Flow Indoor Aerial Navigation 207 Overwatch: Aerial Tracking System Hawkeye Designator Detect & Identify The Pelican - Aerial Delivery System 208 Sailbot Underwater Propulsion Pack Autonomous Amphibious Vehicle Systems RI Lab Deck 209 Pulsed Load for an Elec- Next-Gen Integrated Ships tric Ship Power System Systems Ball Autonomous Weapon System - Battlefield Cover and Suppression Systems Ball: Sparticus 211 Biofeedback Vest Biofeedback Vest Mood Sensor 223 3 4 Semantic Vision 210 Capstone Day Concluded Naval Arch & Ocean Electronic Security: A UserFriendly Approach Nanobots: Advanced Snowflake ADS: Adaptable Carbon Nanotube Microstrip Microrobot Mobility and Precision Guided Airdrop Patch Antenna Performance System 240 1200 – 1215 0955 Room 102: Student Project Videos 110 Electrical & Computer 0855 – 1200 0925 103 301 Soccer - Offsides Deter- Hoptimus Prime - Beverage Let's Get Reel - Automated mining System Dispenser Fishing Pole NA (Reference schedule on page 18) OE (Reference schedule on page 19) During lunch, our VIPs will have a chance to interface Capstone Morning Session Schedule 1025 1055 with our Trident & Bowman scholars. Thank you for all 1125 your hard work. Room 102: Student Project Videos Facial Recognition in Low Facial Detection Algorithm OptimiNeural-Network Based Facial Light Conditions Utilizing the zation for Reducing Power Usage Detection for Android-Based MoNear Infrared Spectrum on Android Device bile Devices WAKE UP: A Cost- Effective Near-Earth Wireless Visualization Drowsiness Detection System (NEW-VIS) for Pilots Sport Aircraft (LSA) Seaplane The Design, Implementation and Evaluation of Ternary Computing as a Replacement to Binary Conceptual Design of an Light Sport Aircraft (LSA) Aerobatic Airplane Tridents Project Titles MATTHEW P. CHRISTIAN Thermal Modeling of Op/cal Probes in Neural Tissue CHRISTOPHER D. GALVIN Effect of Unsteady Wakes on Turbine Tip Gap Leakage Astro6 ParkinsonSAT Pheonix Rocket Development Program TetherSAT MITCHELL R. GRAVES An Algorithm to Iden/fy and Localize Suitable Dock Loca/ons from 3-D LiDAR Scans Portable Composite Bridge for Special Warfare: Team Yolo Automated Corrosion Inspection Robot for U.S. Navy Ships Wood Gasification System for Powering an ATV NICHOLAS R. LASALLE Study of Passive Flow Control of Ship Air Wakes Punkin' Chunkin': Team Smashing Pumpkins Custom Prosthetics for Persons with Special Needs Portable Composite Bridge for Special Warfare: Mind the Gap ZACHARY M. PATRICK Control of PlaCorm Induced JiDer for the Mul/ple Beam Directed Energy System Improved Workstation: Team Dazzling Desk Portable Composite Bridge for Special Warfare: Team Yolo Man-Portable Water Desalination System ANDREW C. TRESANSKY Heat Transfer and Damage Mechanics in laser Irradiated Composite Structures MAX C. VAN BENTHEM Towing Tank Measurements of Hydrodynamic Performance of a Horizontal Axis Tidal Turbine Under Unsteady Flow Condi/ons Computer Vision FSAE Car Quadrocopter Semi-Autonomous Indoor Aerial Recon Skycam Autonomous Surface Vessel Ring Laser Gyroscope Calibration and Integration Jitter Control for a Laser System Maximum Laser Intensity "Portal" Turret: Target Acquisition & Engagement Systems Ball: Ball so Hard Interactive Shooting Range Task Interaction Brainwave-Based Robotic Manipulation Iris Tracking Automated Laundry Folder The Brain Trust - Traumatic Brian Impact Measurement Measurement and Assessment of Trumatic Brain Impact The following Trident Scholars are Bowman Scholars as well. 5 KYLE A. ELAM Isola/on of Thermal and Strain Responses in Composites using Embedded Fiber Bragg Gra/ng Temperature Sensors JENNIFER L. JONES Mechanical Property Evalua/on of Inters//ally Surface Hardened Stainless Steel ANDREW J. RYDALCH Drag Reduc/on in Turbulent Flow over Superhydrophobic Surfaces 6 Project Titles COMPUTER ENGINEERING ROBERT E. BRUSS The Quan/fica/on and Correc/on of Error in an IMU For Use in Autonomous Underwater Vehicles RICKOVER 11O TAYLOR K. CALIBO Quan/ta/ve Emo/onal Stress Recogni/on Using EEG MICHAEL V. CRISTIANO Exerge/c Analysis of a Spray Condensing Steam Apparatus MATTHEW R. DISHER Development of an A3tude Determina/on and Control Simula/on (ADCS) Testbed THOMAS J. DOWD The Design and Implementa/on of a Nonlinear Stabilizing Controller for a DC/DC Converter Module JAMES D. GIESEMANN Hydrodynamic and Heat Transfer analysis of the Advanced Capability High Data Rate Submarine Mast algorithms, and student developed soJware to detect and recognize subjects in an environment without visible light. JACOB T. JURIGA Development of Remote Video Control using Eye Tracking Technology Facial Detec9on Algorithm Power Consump9on Op9miza9on on Advanced Mobile Pla=orms: The overall goal of this project is to im- JACQUELINE M. PENICHET Op/c Flow Impage Processing Algorithms to Localize a Small Autonomous Aerial Vehicle Naviga/ng Under Close Quarters Condi/ons MICHAEL C. RAYNES U/lizing Pure Component Hydrocarbon Fuels for Diesel Combus/on Engines in High Al/tude UAV Opera/ons Neural-Network Based Facial Detec9on for Android-Based Mobile Devices: The goal of the project is to create a face detec/on applica/on for CHRISTOPHER J. STEVENS Facial Detec/on Implementa/on on Mobile Devices Android that runs faster than current applica/ons, to assist with Naval mari/me interdic/on opera/ons. DAVID M. TOWLE Evalua/on of Linear Accelerators for Use in Bremsstrahlung Genera/on for the Detec/on of Special Nuclear Material in a LiDoral Environment ERIC M. WASHKEWICZ Combus/on Effects of Highly Renewable Diesel Fuel Bowmans Project X: Wireless Network A3ack: The 802.11 Wireless Network Protocol has been called the most secure and widely used wireless network. A process called fuzzing iden/fies packets which have unusual effects on a mobile user’s device- the poten/al root of a wireless aDack. Electronic Security: A User-Friendly Approach: As new technology enters the baDlefield, the need to establish secure access to informa/on networks has become a priority. The goal of this project is to implement a userfriendly solu/on to the physical security of the smart device using threefactor authen/ca/on. 7 Facial Recogni9on in Low Light Condi9ons U9lizing the Near Infrared Spectrum: This project synergizes commercial hardware, freely available prove the power performance of an Android plaCorm when op/mizing facial detec/on algorithms. The op/miza/on will be done through code on the Android plaCorm. 8 0925 0955 1025 1055 1125 ELECTRICAL ENGINEERING MECHANICAL ENGINEERING RICKOVER 111 RICKOVER 235 Nanobots: Microrobot Mobility and Performance: This project challenges midshipmen to design microscale robots for micromanipula/on and microassembly. This year team seeks to improve the speed and efficiency of last year’s design to win first place at the annual NIST microrobo/cs compe//on. Snowflake ADS: Adaptable Precision Guided Airdrop System: The Snowflake Aerial Delivery System is based off of the original snowflake project developed at NPS. This design added pitot tube and a new trajectory planner to handle a variety of situa/ons. Carbon Nanotube Microstrip Patch Antenna: This project covers the design, construc/on, and tes/ng of a microstrip patch antenna using mul/-walled carbon nanotubes fabricated into sheets. WAKE UP: A Cost Effec9ve Drowsiness Detec9on System for Pilots: This design will aDempt to implement an algorithm that successfully iden/fies and classifies mental awareness states of a subject, with poten/al for deployment in military and commercial aircraJ. Near-Earth Wireless Visualiza9on (NEW-VIS): This project's goal is to gain a beDer understanding of signal propaga/on in the nearground region by providing more accurate and flexible measurements compared to exis/ng single-point systems. Design, Implementa9on, & Evalua9on of Ternary Compu9ng as a Replacement to Binary: The goal of this project is to design a balanced ternary adding device, with a focus on the design, simula/on, fabrica/on and performance of the balanced ternary inverter. 0855 NWSC Ballis9c Projec9le Tes9ng for Railgun: Naval Surface Warfare Center (NSWC) Dahlgren is designing a 24" projec/le for the Electromagne/c Railgun. Computer simula/ons have produced conflic/ng predic/ons, so this team has designed a scale model projec/le for tes/ng in the USNA Supersonic Wind Tunnel. 0855 0925 Low-Cost Water Desalina9on System: World Vision's Water Sanita/on & Hygiene program (WASH) needs a filtra/on system capable of removing corrosive salts from pumped well water in third-world countries. The goal of this design project was to build new, or modify exis/ng, machinery in order to cheaply and easily desalinate water. 0925 0955 Hydraulic Regenera9ve Braking for an ATV: This project seeks to design & implement a hydraulic regenera/ve braking system without requiring extensive redesign of vehicle systems. The team will model the proposed system & design the mechanical assemblies required to implement the system on a vehicle. 0955 1025 Portable Composite Bridge for Special Warfare (Team Yolo): In forward opera/ng areas, ground troops oJen have to ford irriga/on canals and other obstacles ranging from a foot, to tens of feet, wide. A man-portable, lightweight, rapidly employed method to traverse these obstacles is needed. This is one of three groups compe/ng in this challenge. 1025 1055 Naval Research Lab: Automated Corrosion Inspec9on Robot "Corrobot" for Navy Ships: NRL has sponsored a program to develop 1055 an autonomous vehicle capable of naviga/ng the weather decks of US Navy ships, searching for, documen/ng, and remedia/ng corrosion. Wood Gasifica9on for Powering ATV: This project seeks to u/lize gasses released by the burning of wood in an oxygen deficient environment to power a vehicle. 1125 9 10 1125 MECHANICAL ENGINEERING MECHANICAL ENGINEERING RICKOVER 239 RICKOVER 236 ASME Compe99on: Remote Inspec9on Device: Inspired by the March 2011 Fukushima tsunami & earthquake induced nuclear accident, the nuclear industry has requested development of a remotely operated 0855 inspec/on vehicle that can survey radia/on levels & inspect for damage within a damaged facility. ASME Compe99on: Human Powered Vehicle: This team is developing a human powered land vehicle, capable of high performance opera0925 /on, and in addi/on, is safe, prac/cal, and ingenious. Punkin' Chunkin' (Team Pumpkin ‘Merica): This group has designed a human powered trebuchet capable of launching 8-10 lb. pumpkins to far distances. The trebuchet will compete against Team Smashing Pumpkins in Nov, 2013 by the following year's team. Punkin' Chunkin' (Team Smashing Pumpkins): The second team to design a human powered trebuchet capable of launching 8-10 lb. pumpkins to far distances. The trebuchet will compete against Team Pumpkin ’Merica in Nov, 2013 by the following year's team. 0955 1025 Custom Prosthe9cs for Special Needs (Trikes for Tykes ): This project centers around a young boy whose underdeveloped legs hinder him from walking on his own. The team's mission is to design an assisted 1055 walking devices that will help increase his leg muscle's strength & mobility, while protec/ng him from injury, ul/mately allowing him to walk unassisted. Portable Composite Bridge for Special Warfare (Team Mind the Gap) In forward opera/ng areas, ground troops oJen have to ford irriga/on canals and other obstacles ranging from a foot, to tens of feet, wide. A 1125 man-portable, lightweight, rapidly employed method to traverse these obstacles is needed. This is one of three groups compe/ng in this challenge. 11 Barbeque Smoker Thermodynamic Analysis: The team constructed a meat smoker for use at the departmental spring picnic. The device showcases student's capabili/es, is func/onal, and stylish. The project involves both structural & thermal analyses. 0855 Human-Powered Submarine Drivetrain Redesign: USNA designed & built a human-powered submarine (HPS) that competed in the Interna/onal Submarine Races held in Jun 2011 at NWSC Carderock. This team has improved the drivetrain design to support poten/al implementa/on of HPSs in the future Navy. 0925 Improved Worksta9on (Team SAW): Military support staff would benefit from a low-cost worksta/on that adjusts from si3ng to standing work, as well as allowing for napping/sleeping as opera/onal requirements dictate. This is one of two teams working on an improved worksta/on that achieves the stated objec/ve at an affordable price. 0955 Improved Worksta9on (Team Dazzling Desk): This is the second of two teams working on an improved worksta/on. 1025 Portable Composite Bridge for Special Warfare (Team Anchormen): In forward opera/ng areas, ground troops oJen have to ford irriga/on canals and other obstacles ranging from a foot, to tens of feet, wide. A man-portable, lightweight, rapidly employed method to traverse these obstacles is needed. This is one of three groups compe/ng in this challenge. 1055 Man-Portable Water Desalina9on System: US ground forces deploy into environments where fresh water is not always guaranteed. This team's goal was to design a man-portable, low maintenance, water purifica/on system capable of supplying 20 people for 3 months, with the goal of replacing the current prac/ce of using expensive pallets of boDled water 1125 12 SYSTEMS ENGINEERING SYSTEMS ENGINEERING RICKOVER 203 RICKOVER 207 Autonomous Cruise Control: An adap/ve cruise control system is designed and implemented on a golf cart. 0855 Aerial Tracking System (Overwatch): An autonomous, target-tracking 0855 AUV Intelligent Ground Vehicle: The design, build, and programing of an autonomous medium scale vehicle, capable of naviga/ng an outdoor obstacle course. 0925 Hawkeye Designator: a live feedback robot that searches a room, iden/fies targets, and then gives the user the op/on to engage said targets. 0925 Formula SAE Car: Development of a wireless vehicle data acquisi/on system, implementa/on of paddle shiJ gearbox, & development of a trac/on control system. 0955 The Pelican- Aerial Delivery System: The goal is to design a system capable of precise delivery of a payload from an aircraJ by parachute drop. 0955 Semi-Autonomous Indoor Aerial Reconnaissance: A mul/-semester project aiming to conduct indoor reconnaissance in hos/le condi/ons. 1025 Skycam: The design, construc/on, & programming of an aerial parallel-cable manipulator. 1055 Autonomous Off-road Naviga9on: A LiDAR-based autonomous vehi1025 cle designed to navigate without human interven/on Detec9on of 3D objects using the MicrosoL Kinect: ADemp/ng to u/lize RGBd images to isolate objects from the background and compare them to known object models. 1055 RICKOVER 208 RICKOVER 206 Target Tracking Aerial Robot: A UAV designed to autonomously follow designated targets, and report informa/on to operators. Sailbot: An autonomous sailing vessel. 0855 Underwater Propulsion Pack: A hands-free guidable propulsor that allows users to do other things while transi/ng to their desired loca/on. 0925 0855 Micro-blimp: The Microblimp project aims to provide a test plaCorm for aerial vehicle maneuver control, to include autonomous waypoint 0925 naviga/on and obstacle avoidance. Autonomous Amphibious Vehicle: An autonomous vessel created for 0955 the 2013 AUVSI RoboBoat compe//on. Bug Eye: This inves/ga/on focuses on op/c flow image processing algorithms to localize a small autonomous aerial vehicle naviga/ng under close-quarter condi/ons. 0955 Hexrotor: Using micro rotorcraJ to search for & iden/fy concealed explosives in an indoor hos/le environment. 1025 13 Autonomous Surface Vessel: An autonomous surface vessel created for the 2013 AUVSI RoboBoat compe//on. 1025 Ring Laser Gyro Integra9on/Calibra9on: A Honeywell HG1700 IMU is being evaluated as a heading reference for USNA's autonomous un1055 derwater vehicle entry in the AUVSI Robosub student compe//on 14 SYSTEMS ENGINEERING SYSTEMS ENGINEERING RICKOVER 209 RICKOVER 211 Pulsed Load for an Electric Ship: Design and construc/on of an Energy Storage Module (ESM) representa/ve of current designs to be imple- 0855 mented on naval vessels. Biofeedback Vest: Developing a wearable device to monitor real-/me 0855 biological status of troops & emergency responders. Biofeedback Vest: Developing a wearable device to monitor real-/me 0925 biological status of troops & emergency responders. Next-Gen Integrated Power System: The modeling, design, implementa/on, and tes/ng a stabilizing controller for a low power, low voltage DC/DC power converter. 0925 Seman9c Vision: Computer vision recogni/on and classifica/on of weapons using the scale invariant feature transforms (SIFT) method. 0955 Ji3er Control for laser system: Predic/ng the posi/on of a laser spot at a target using only on-board sensors. 1025 Brainwave-Based Robo9c Manipula9on: Novel approaches in controlling a robo/c manipulator & providing feedback to the operator. 1055 Maximum Laser Intensity: Reducing a laser beam’s spa/al intensity variance to achieve greater on-target effect. 1055 Iris Tracking: A system that automa/cally pans and /lts a remote camera based on where the user is looking in the video feed. 1125 Mood Sensor: Determining a person’s feelings and drawing responses 0955 using computers. Teleoperated Hand Robot & Hap9c Feedback Exoskeleton: Designing a CyberGlove allowing a user to “feel” torques and finger/p forces 1025 exerted on a robo/c manipulator. RICKOVER 210 RICKOVER 223 Systems Ball: Construc/on of a robot capable of compe/ng with other robots on a constructed arena. 0855 Autonomous Weapon System- Ba3lefield Cover & Suppression: A computer-vision based tracking and targe/ng system. 0925 Beverage Dispenser “Hop9mus Prime”: A novel approach to beverage dispensing. 0925 Systems Ball: “Spar9cus” A robot capable of compe/ng with other robots on a constructed arena. 0955 Automated Fishing Pole: A fishing pole that detects a fish strike, and automa/cally reels the Aquarian vic/m in. 0955 Portal Turret: An automated sentry turret to detect, track, and engage a human using FLIR, computer vision, and mo/on detec/on capabili/es. 1025 Automated Laundry Folder (ALF): A machine designed to replace the dull task of folding clean laundry. 1025 Systems Ball: “Ball so Hard” A robot capable of compe/ng with other robots on a constructed arena. 1055 Trauma9c Brain Impact Measurement: Design & construc/on of a system that mimics a human punch to study trauma/c brain injuries. 1055 Interac9ve Shoo9ng Range: Developing a target range with moving (& shootable) graphics. 1125 Measurement & Assessment of Trauma9c Brain Impact: Construc/ng a model of the human head and brain to model impact injuries. 1125 15 Soccer: Off-sides Determining System: A referee’s aid to determining 0855 on or off-sides calls during a soccer game. 16 AERONAUTICAL ENGINEERING NAVAL ARCHITECTURE RICKOVER 240 RICKOVER 103 Conceptual Design of a Light Sport AircraL– Seaplane 0955 Conceptual Design of a Light Sport AircraL– Aeroba9c 1055 ASTRONAUTICAL ENGINEERING Trans-Pacific 52' Racing Yacht: The Trans-Pac 52 yacht is designed in accordance with the governing rules of the 2013 Trans-Pac 52 Box Rule. 0900– 0945 Bering Sea Crabbing Vessel: The Bering Sea Crabbing Vessel will be designed to accomplish offshore crabbing, live crab holding, and ice transi/ng. 0945– 1030 An9-Piracy Vessel: This team designed an an/-piracy vessel that will operate off the horn of Africa with missions including Port security and 1030– defense, an/- piracy, general law enforcement, and mari/me inter1115 cep/on opera/ons. RICKOVER 243 Polar Science Program (Arc9c Weather Probe): The mission of the Aerospace Engineering por/on of the Polar Science Program is to supplement Arc/c and Antarc/c environmental data observing systems. 855 Balloon Launched Autonomous Recovery Naval Experiment (BLARNE): The project objec/ve is to provide the capability for a fully autonomous cargo delivery system using a steerable parafoil. 925 Debris Resis9ve / Acous9cs grid Orbital Naval Sensor: Demonstrate an inexpensive, low resource space instrument that can measure the characteris/cs of orbital debris and improve debris models to improve risk assessment and provide a real-/me impact monitoring system as basis for taking defensive evasive ac/on. 955 Li3oral Combat Submarine: The goal of this team is to produce a preliminary design of a submarine using diesel/gas turbine/electric pro- 1115– pulsion, and suitable for use in unconven/onal missions in the liDoral 1200 zone. English Channel ROPAX Ferry: This Capstone project explores the pos1300sibility of crea/ng a vessel capable of transpor/ng ~1000 passengers 1340 and 400 vehicles between England & France. Air Bearing SpacecraL Simulator: Astro 6 ParkinsonSAT Remote Data Relay: Development of an a3tude determina/on and control 1025 simula/on testbed for improving the performance and expanding the scope of small satellite missions Phoenix 10km Rocket Development Program: The Phoenix program teaches the basics of rocket design & program development by challenging groups to build a rocket with a 10 km apogee. 1055 TetherSAT: The design and development of a set of small satellites that will deploy a tether between them in space, in order to characterize the dynamics of the tether deployment and u/liza/on. 1125 17 High Speed Motor Yacht: This design effort aims at crea/ng a lavishly furnished luxury yacht capable of up to 7 day voyages, with a short range cruising speed of 45 knots. 13451430 Avenger High Speed Assault CraL: This craJ is designed to reach speeds of 45 kts, as well as be underway for up to 3 days, and perform 1430a variety of missions and tasks rela/ng to liDoral patrol and special 1510 warfare. 18 OCEAN ENGINEERING UNITED STATES NAVAL ACADEMY RICKOVER 301 121 BLAKE ROAD Mul9-direc9onal Wavemaker: A mul/-chamber pneuma/c wavemaker 0820system is being designed that produces surfable waves moving in differ0845 ent direc/ons for use at recrea/onal water parks. Delaware: Proposed Ocean Fishing Pier (#1): One of two studies exploring the feasibility & design of a public ocean fishing pier on the Delaware shore. Factors include site selec/on, constructability, environment, and budgets. Delaware: Proposed Ocean Fishing Pier (#2): The second of two studies exploring the construc/on of fishing pier on the Delaware shore. ANNAPOLIS, MD 08550920 09200945 Erosion Preven9on: Brunswick Town/Ft. Anderson, NC: Designing a sys0955tem to stop erosion and restore /dal marsh habitat through the use of 1020 living shorelines at a historic & cultural site. Special thanks to all supporters of Midshipman research: USNA Faculty and Staff Shoreline enhancement- Camp Lejuene: A mul/-faceted shoreline resto1020ra/on plan to prevent further erosion, add /dal wetland, and provide a 1045 recrea/onal beach for off-duty Marines. USNA Media Support Center & Nimitz Library Arc9c Buoy: An ongoing project refining the design & deployment of an 1055arc/c buoy to gather air and sea temperatures, atmospheric pressure and 1115 sea ice cover images. Design & Fab of Tac9cal Human Powered Submarine: Developing an alterna/ve means of covertly insert Special Warfare forces into liDoral regions. 11151150 Analysis/Improvement of Stormwater drainage at Naval Sta9on Nor1300folk: Developing a long-term solu/on ensuring the maximum drainage at 1325 the Naval Sta/on’s Vista Point ouCall. Floa9ng Offshore Wind Farm: The goal of this project is to design a floa/ng offshore wind farm in the 310-m deep Jordan's Bank in the Gulf of Maine. Offshore Wind Farm: Ocean City, MD: A design and economic feasibility assessment of construc/ng an offshore wind farm with a capacity of approximately 200 MW. Farragut Revetment Reconstruc9on Design: Determining the cause of armor stone seDlement at the Farragut revetment, and designing a new revetment able of withstanding the observed seDlement. 13301355 13551420 14301455 USNA Concrete Canoe: The USNA concrete canoe team seeks to design a 1455canoe that is lightweight, aesthe/cally appealing, streamlined, and struc1520 turally sound to compete in the ASCE regional compe//on. 19 20