Document 11048944
advertisement

y^^^^'^-^^^^j^
iJimEi
HD28
.M414
IMAR 141991
ALFRED
P.
WORKING PAPER
SLOAN SCHOOL OF MANAGEMENT
Johnny Canon vs. the
Smothers Brothers
Monolog vt. Dialog
in
CotUy
Bilateral
Comnunicatifln
FredKohnan
Massachusetts Institute of Technology
Jim
Ratliff
University of California, Berkeley
WP#
3254.91-EFA
March 1991
MASSACHUSETTS
INSTITUTE OF TECHNOLOGY
50 MEMORIAL DRIVE
CAMBRIDGE, MASSACHUSETTS 02139
Johnny Canon vs. the
Smothers Brothers
Monolog y«. DUlog
in Cottly Bilateral
Communicatlan
FredKofnun
Massachusetts Institute o( Technology
Jim
Ratliff
University of California, Berkeley
WP#
3254-91-EFA
March 1991
w^m
"*-:r!v
MJX
MAR
LIBRARir
}
4 1991
H-U
f
!
Johnny Carson
\rs.
the
Smothers Brothers
!Mono[qg
vs. (DiaCog in
Fred Kofman
Sloan School of Management
Massachusetts Institute of Technology
Jim Ratliff
Department of Economics
University of CaHfomia, Berkeley
February 27, 1991
was supported by National
Science Foundation Grant IRI-8902813
This research
and by
the
Shan
Foundation.
CostCy bilateral Communication
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
of a
common
1
organizations communicate with each other in order to coordinate their actions in pursuit
goal. Bilateral information
monolog would be
typical
Page
Introduction
!•
Members of
February 27. 1991
chooses an inventory
strategist describes a
a published forecast of market conditions in response to
level.
new
exchanges can be broadly classified as monologs or dialogs.
A
A
which a manager
typical dialog could be a question-and-answer session; e.g. the chief
product, the marketing prognosticator announces a sales estimate based on that
description, and then the strategist decides whether to introduce the product.
Our common sense and experience
ubiquitous
mode of communication
tell
us that dialog,
in the real world.
It
some sense dominant,
not in
if
provocative, then, to compare this observed
is
dialog-rich communication with the type of discourse manifested in traditional
most models with asymmetric information an agent
principal. Consideration
is
upon
called
is
certainly a
is
economic
analysis. In
to report her private information to a
usually restricted to mechanisms in which the agent fully and truthfully
reveals the entirety of her private information
models of a monolog world. (There
is
everything she knows, because you
know
no need
that
(i.e.
she declares her "type")-^ In other words these are
to ask a question of
someone who
you
answer
will receive the
is
planning to
to every question
tell
you
which she
could possibly answer.)
Why
do we observe dialog
in the
world but not
Principle in order to claim that no generality
is
in
lost
our models? Theorists invoke the Revelation
when
mechanisms. This exploitation of the Revelation Principle
is
When communication
costless. 2
is
is
they focus upon tell-everything monolog
only valid, however,
costly, full revelation of type
may
when communication
be so expensive as to be
suboptimal, and efficiency in communication becomes a relevant criterion for the mechanism designer.
This raises
new
questions of
who
should say what to
whom
and when and thereby introduces
the
possibility of observing dialog.^
The
costs of
communication
is
a theoretical lacuna
which begs
to be closed.
As
Tirole [1988: 49] has
pointed out: "Neoclassical theory pays only lip service to the issue of communication. Information flows
between members of an organization are limited only because of incentive compatibility
even well-intentioned members of an organization
...
may have
information they possess to their relevant co-members, because
information
profit
is
hard to 'codify' to make
maximizing under
full
some circumstances
understandable to
communication
[1974: 5] advocates that before
In
it
we can
will not be
its
it
is
.
.
.
However,
trouble communicating
all
the
too time consuming or because the
receivers. Thus, decisions that
would be
made under imperfect communication." Arrow
rigorously evaluate the market mechanism's claim to superior
efficiency can be achieved without full revelation. Sec Groves and Ledyard [1977], Drfize and de
la
Valine
Poussin [1971], and Malinvaud [1971].
McAfee and McMillan [1988] extend
the Revelation Principle to a case in
which the principal bears a communication cost but the
agents do not.
Even more
communication has the potential to explain the existence of hierarchical organizational structures. (One
outcome of a decentralized organization can be replicated by a centralized twoder structure; therefore hierarchy can never be strictly preferred.) See Melumad, Mookhetjee, and Reichelstein [1989] for work in this
direction which adopts a message space dimensionality perspective on communication cost.
generally, costly
interpretation of the Revelation Principle holds that the
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
economy we must "add
informational
Communication costs lead
restrictions
to our usual
economic calculations an appropriate measure of the
and transmission."
costs of information gathering
knowledge
February 27, 1991
Page 2
bounded
to
— upon
decisionmakers. Limited communication
sources of bounded rationality, for example limited memory.
a
impose cognitive limitations
rationality because they
Dow
is
similar formally to other
[1991] studies an agent searching for
low price and asks how the agent can make optimal use of her limited memory for observed
Clearly this
— via
prices.
equivalent to a team^ communication problem with two partners. Past and Present, where
is
how
the design decision is
Past should use hmited communication resources to inform Present about the
price Past observed.
When communication
is
free
and truthful revelation
transmitted to a specified decisionmaker.
information exchange, the
the conversation
more qualified
whom
some agents
to
the decision
we
In this paper
initial
make
is
assured, all relevant information can be
However, when communication costs
comprehensive
inhibit a
informational asymmetries are not completely obliterated; by the end of
know some
still
may
be
must determine
to
Some
things which others do not know.
the choice-of-action decision, and therefore the designer
agent
would be optimally delegated and under what circumstances.
posit the existence of
communication costs
in a bilateral
team context. Our task
is
to
determine the exact process by which private information should be shared and decisionmaking
authority should be delegated.
for
one party to engage
in a
We
will see that indeed there exist cases in
monolog with
the other;
i.e.
a dialog
which
would be suboptimal
it
would achieve
a higher performance
standard for a fixed communication cost.
We
are
intrigued by three features of the optimal information sharing
encountered during our research.
efficiency
it
is
First,
they can have an unpredictable hfe of their own.
we merely
not sufficient that
in a particular,
To
guarantee
enrich the designer's toolkit to include a simplistic
A
capability of alternating question and answer.
microphone change hands
mechanisms we have
rigid,
fixed-sequence dialog
— which
dictates that the
predetermined order and prescribes ahead of time a particular
—can
agent as the ultimate decisionmaker
be suboptimal just as a rigid monolog can be. Instead, the
designer must supply a communication algorithm, according to which the identity of the speaker
at
any
stage and the identity of the ultimate decisionmaker are determined endogenously by the particular
realization of the agents* private data. Just as a software engineer carmot predict precisely
will result
cannot
—
from a computer program without
in
first
knowing
ignorance of the agents' private information
its
input data, the
— predict
what output
mechanism designer
the sequence of speakers in the
conversation or the identity of the decisionmaker.
Secondly,
it
can be
strictly better if
occasionally neither party speaks
action in complete ignorance of the other's private information
the right to
A
team
—
letting
one of them choose an
even when they have already paid for
communicate and when the choice of action could be improved by more precise knowledge
in the
sense of Marschak and Radner [1972]
This communication
is
clearly limited to a
is
monolog
a
group whose members have only
in
paranormal fortunetelling rather than bounded rationality!
which Past speaks
to Present.
common
interests.
The reverse
direction
would be
a case of
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
February 27, 1991
Page 3
of that private information.^ The intuition for
dehberate silence
in
increases the informativeness of communication in the remaining circumstances.
some circumstances
loss in
this counterintuitive result is that a
decisionmaking quaUty due to remaining
silent in a
A
circumstance in vhich communication would
be relatively ineffective anyway can be traded-off against a gain generated by the resulting increased
informativeness in cases where communication
A
third interesting feature of these optimal
We
conversation.
the size of the
communication budget.
Although we show
more
that dialog
separability requirement.
information
it
is
—
An
If
crucial.
communication algorithms concerns who dominates
who
you cannot pay
to spend,
it
Mathematically
interpretation of this result
—generated
much
for
one agent
talking, perhaps
is
the
can be optimal to hear instead from the other.
efficient.
is
the
should do the most talking can depend on
sometimes necessary for efficiency, we do establish
is
conditions under which monolog
resuh
more
will see that the identity of the agent
preferred lecttirer. If you have
in the final
is
is
that
sufficient
takes the form of an additive
this
monolog
will be sufficient
when
the error
by a given misestimate by the decisionmaker of her partner's private
independent of the decisionmaker's private information. For monolog efficiency, then,
is
sufficient that the decision
problem have a structure
which the partners' private data do not
in
interact in this well-defined sense.
The problem
on the analytical issues raised by costly communication we will abstract away from
In order to focus
incentive issues and study the following problem:^ Consider a team of
The designer's
task
is
to construct a
mechanism through which
information with one another in order that one of them will
depend on both of
their privately
each agent's private datum will be
Our communication
known
at the
cost measure
is
data.
'
^
are
make
privately informed
team members share
a decision
(The designer does not know
time the mechanism
is
(i.e.
at
members.
their private
which would optimally
the time of design what
implemented.)
communication length and
of binary digits (bits) in the longest possible exchange
Thus we
the
two
over
is
all
worst-case:
we pay
for the
number
possible private data realizations)."*
this is a principal part of its cost.^
emphasizing that communication takes time and that
A
Such an algorithm bean a formal resemblance to "management by exception" in which more communication occurs when private
information take* on "exceptional" values. (Marschak and Radner [1972: 206-207])
- Present
This phenomenon can also occur in Dow's [1991] limited-memory search model. No communication from Past
to buying the good from the first firm visited without bothering to visit the second firm to compare prices.
without observing both firms' prices.
the right to comparison shop.
the correct decision and
between higher prices
decision would be
^
We
*
A
thank
is
By
Ratliff [1991b]
show
that the
shopper would be
strictly better off if
not a very costly mistake even
when
it
is
first
firm's price
is
very low (which
equivalent
she could waive
is
incorrect), she
costly.
Tom Marschak
for posing to us a discrete formulation of this
problem from which the present paper evolved.
similar problem has been studied in the computer science literature concerning distiibuted and parallel processing.
discrete
is
prohibits buying
almost certainly
husbands her memory to more finely discnminate
firm. This improves her decision about which firm to buy from in the situations in which the wrong
purchasing without comparing prices when the
for the first
more
Kofman and
Dow
form of approximating a Boolean-valued function defined on a
grid.
See Yao [79], Abelson
[80],
It
takes the
and Karp and
Ng
[forthcoming].
^
is used by Oniki [1986], who compares the informational efficiency
of an auctioneer-mediated market with that of a centralized system for a particular single-good production economy. This contrasts with
another strand in the literature in which the communication constraint is the dimensionality of the message space (i.e. the number of
This information theoretic approach to measuring communication
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlitf
mechanism
efficient
is
mechanism which pays
if it
results in a worst-case decision
for the
same number of
algorithm in order to establish the
n
we
February 27, 1991
Page 4
minimum
bits.i
error no greater than that of any other
For a given n
we
search for an efficient n-bit
worst-case decision error associated with n
bits.
By
then can construct the efficient error-communication length frontier.
We now
develop
present two scenarios as exemplar problems which can be analyzed using the tools
Two
we
in this paper.
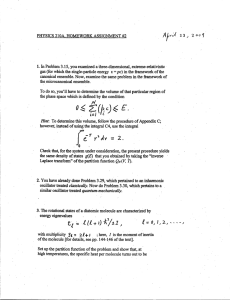
"ETiiampCe 1:
Team- spying the
spies, Boris
tTqpCosivts factory
and Natasha, will be placed behind enemy lines to determine the amount of
explosives being produced by a factory. The explosives are manufactured from two inputs
according to a well-known production function. These inputs are produced
arrive at the factory along different roads.
From
well known.
in separate
The maximum capacity of each road
of X. (See Figure
amount of
F; similarly
X
and Y
regions and hence
to handle truck traffic
his vantage point Boris can observe with complete precision the flow of
factory but cannot observe at all the
that
varying
X
is
into the
Natasha can observe the flow of Y but not
1.)
Delivery route
for input
X
dl
Ttxt^MAor
Explosives
factory
N
Delivery route
for input
Figure
Each spy
is
is
The map
for the nnission.
equipped with a short-range radio which can send on/off pulses to the other. The enemy
not yet aware that the factory
greater
1:
Y
is
is
being surveilled, and the more numerous are the inter-spy pulses, the
the risk that the espionage mission will be discovered. Consequently the spies want to
minimize their communication with each other subject to a constraint on the accuracy of their production
estimate.
The
radios' range
is
too short to reach their
home
territory, so
one of the spies must physically
message "pipelines") with no constraint on how much a pipeline can be used. For example see Hurwicz [1960], Mount and Reiter
[1974], Walker [1977], Osana [1978], Jordan [1982], and Green and L^font [1987].
Minimizing the worst-case error
is
a reasonable optimality criterion in circumstances of "complete ignorance"
[1977]) or in an infinite risk aversion limit.
to
guide research under other
criteria.
Its tiactability
aids in breaking
new ground, and
(Arrow and Hurwicz
results achieved here generate conjectures
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
return
home
— by
February 27. 1991
Page 5
navigating the only available single-person kayak
down
a wild river
—
in
order to
commanders.
deliver an intelligence assessment to their
Prior to being deployed in hostile territory Boris and Natasha meet at a local bistro to have a beer and
communication algorithm. Upon what
to design a
communication and decision delegation
rules of
should they coordinate? For some fixed number n of pulses
who
should send the
first
pulse? Should
Who
followed by a second pulse from the same spy or perhaps by a premier pulse from the other?
be the Whitewater courier delivering the final guestimate of explosives production?
How
sequence of pulses and the identity of the kayaker depend on the spies' private information
quantities
X
will
will this
upon
the
and Y they each observe)?
Once they have decided upon
determined
(i.e.
be
it
its
communication algorithm
worst-case error, there
result in a greater
intelligence report.
the inter-spy
a
chance that
What
is
their
is still
for every fixed
what number n
the question of
number n of
to pick.
More
pulses and
pulses would
cover will be blown but would also increase the accuracy of their
the tradeoff?
I.e.
how much would
accuracy be improved by an increase
in
communication?
'Lj^ampU 2: Production decisions in an informationaCCy decentraCized firm
Consider a ski equipment manufacturer where the personnel director must be told
w
to hire for the
upcoming production season. The relevant information
distributed throughout the organization:
per- worker ar€[0, a].
(See Figure
The production manager
The marketing chief
for the optimal decision
The
will learn the precise value of a
Boundary
Production
Supervisor
—
Knows
of
demand parameter /?e[0,y3].
Economic Expertise-
Director
Knows demand
productivity
parameter
Marketing
-a-
a
parameter
/?
-v—
X y
Personnel
Department
Hires
Figure 2:
An
is
will learn precisely the productivity-
2.)
r
how many workers
L* workers
informationally decentralized firm.
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
When communication
is
February 27, 1991
Page 6
costly, the design
problem
is
to construct an efficient procedure by
which the
production manager and marketing chief will share their private information in order to estimate w*.'
employment
After this exchange the appropriate party can inform the personnel director of the optimal
The goal
level w*.2
to
is
minimize the worst-case departure from optimal employment over
The same design questions
dialog?
arise here as in the
manager or
the production
first,
Or should
spy example. For a fixed communication cost,
the production manager, say, use the entire
calculate an approximation to the optimal
communication allotment
employment
level
that the
w*? After
What
what point does
On
it
is
the tradeoff between
no longer pay
for the
to
inform her
marketing chief can then
design problem has been
this
solved for an arbitrary fixed communication cost, the decision remains about
perform.
who
the marketing chief? Should they discuss the matter in a
panner as precisely as possible about productivity-per-worker so
to
possible
demand combinations.
productivity and
should speak
all
how much communication
communication cost and worst-case employment error? At
two informed
parties to continue to talk to
one another?
interpretation
The phenomena with which we
delegation.
Of
course
we
are concerned are
realize that people
communication, coordination, and decision
do not communicate by exchanging
each other one-dimensionally on an interval, that the problem of an organization
bits in
order to locate
not to announce a
is
value which minimizes the worst-case error of approximation to a function, and that incentive
compatibility
a crucial constraint.
is
metaphor
tractable,
more complex
for
We
it
is
will bring
not.
become
them
satisfaction
The focus of our research
a
in
mind
the action
if
is
model
as a usefully interesting, yet
situations.
The more general scenario we have
which
do, however, see our
is
is
appropriate to their
the process by
more nearly commonly known
two people seeking
situation.
consensus action
to arrive at a
common
situation
and some pain
if
which two individual and privately known situations
That
is
to say:
how do two
come
to share an
to another the full
meaning of
agents
understanding of the state of the world?
We
beheve
her situation.
perceives,
that there is
We
no way
in
which a human being can express
claim that a person has no method of letting someone else
believes, remembers, guesses, understands, fears, hopes,
environment and herself
conversation, so
we must
in a finite
amount of
time.
know
everything that she
and doubts about both the
However, action must be taken
after
only a
finite
be concemed with efficient communication.
For example, the production manager does not only know the normal productivity of different inputs
for a given technology.
The personnel
She also knows the
and morale of the workers, the probabiUty
that the
economics classes and would not know how to compute the optimal employment level even if
thus he is outside the boundary of economic expertise. Consequently we need not consider
which the production manager and the marketing chief both communicate approximations of their private information
director rarely attended his
he were perfectly informed about
algorithms in
reUability
a
and
fi\
directly to the personnel director.
This communication with the personnel director is also costly. However, we assume that it is equally costly regardless of whether
done by the production manager or the marketing chief Therefore it is a fixed cost in the design problem.
it
is
'
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
February 27, 1991
Page
7
machines will break down, the necessary maintenance schedule, the gossip about new technical
developments,
We
etc.
(Moreover, she has a
assen that she cannot transmit
lot
all
of background beliefs of which she
this,
may
not even be aware!)
so she must use her language providently
when
she
coordinates her actions with others.
our model
In
consider points
we do
not attempt to replicate a complicated, multidimensional
in a rectangle.
On
the other hand,
we need
not
endow
dependent natural language; we have zeros and ones. In our opinion
we impose when we
We
manageable space.
(the
project what-to-communicate and
situation;"
tractability justifies the simplicity
how-to-communicate onto
conceptually
a
meaning of the messages) within an elegant mathematical formalism.
team has two
partners:
X
and
The Model
They have
Y.
a joint address
6 = idx,dY) = (x,y) on
a rectangle
E = ExxEy,
(A.l)
where Ex and Ey are the closed
A
we
the agents with a rich context-
can then address issues of syntax (the rules of communication) and semantics
3.
A
"common
intervals
Ex = [a,bl
(A.2a)
Ey^icd].
(A.2b)
real-valued optimal action function
known
defined and bounded on the rectangle E, viz.
However, each partner knows only
the precise value of y. Initially
knows only
that
E—>
R, and
is
X knows
the precise value of x and
Y
ysEy.
Y
is
that
Similarly,
xeEx-
partners
the choice of action
is
dictated by a
The algorithm R must specify
binary digits {bits) to one another.
the desired action (p(6).
the instigator
—
—
the
parmer who
as well as
the ultimate action and when.^ Because
bits sent
R
of the players then
understood by both players.
process by either immediately
sends what
knowledge of x and y
respectively, partner Ts activities under the algorithm
on the history of
is
initiates the
who
One
The communication process and
communication algorithm R, which
selecting an action or by sending the first bit
who chooses
a projection of 6;
X's only information about K's location
may communicate by sending
chooses an action y/eE which approximates
The
q>:
to both players. Ideally the team would take the optimal action (p(6) corresponding to their joint
address.
knows
is
bits to
is
whom
and when and
privately held by
can depend only on her
own
X
and Y,
coordinate ^, and
and received; they carmot depend explicitly on her partner's coordinate
Without loss of generality we assume
that the
dj.
two parmers never send simultaneous messages.
Our
strategy of radical simplification seems to be vindicated by our work-in-progress using a multidimensional information structure for
each partner. We have found interesting multidimensional problems which decompose into separate one-dimensional problems and
which therefore directly require the techniques we develop in this paper.
Because of the information partition the identity of the instigator must be a property of the algorithm which
(Otherwise there would be cases in which both players tried to instigate or neither instigated.)
is
independent of 9.
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
February 27, 1991
Page 8
R
For a given 6 the communication algoritlim
some
of bits and results in
action y/id).
the longest possible exchange,
n
Note
that
prescribes a particular exchange of
The communication
length, n,of
R
the
is
some number
number of
bits sent in
i.e.
= maxr](,d).
we
(A. 3)
are adopting a worst-case definition of the
error of the algorithm
R
is
communication length of the algorithm R. The
also a worst-case formulation:
£=sup\y/(e)-(p(e)\.
(^4)
Without loss of generality we assume that
function of
^
bounded and therefore
is
T](d)
The designer's problem
is
y/ is
bounded on the
that the error of
to specify
—
in
R
is
unit square to ensure that the error as a
defined.
ignorance of which 6 will be realized
—communication
algorithms which are efficient with respect to communication length and error of approximation.
algorithm
a
R
is
efficient if there exists
no other algorithm which achieves either a
weakly lower communication length or a
We
error.
(error,
all
communication length)
For a given joint location
actor for 6.
We
information
set: the
the actor
pairs,
i.e.
we need
lower error with
lower communication length with a weakly lower
wish to characterize for a given function
of the efficient algorithms;
0€5,
strictly
strictly
^
the
efficient
frontier
those which result from efficient algorithms.
of achievable
We
6, the algorithm
R
will ultimately call
upon one of the partners
y/(S)
minimal subset S czE within which she knows 6 to
that the optimal action <p(d) belongs to the
lie.
Given her knowledge
image of 5 under
(i.e.
in the
that
(p:
(a.s)
worst-case error minimizing) approximation action given S
is
the midpoint of (p(S),
= ^Onf (PCS) + sup (fKS)),
which results
to be the
characterize the actor's knowledge about 9 at that time by specifying the actor's
knows
actor's best
need not find
locate only a subset sufficient to demarcate the frontier.
(piS)={(pidy.eeS].
The
An
(A.6)
worst-case error given S,
where we denote the function's oscillation over 5 by
A(p{S)
We
= supqKS)-\ni<p{S).
(A.S)
observe that adding points to S would weakly increase the supremum and weakly decrease the
infimum and thereby weakly increase the
set is
oscillation of
weakly greater than the error over the subset.
g>
over S; therefore the error over a
strictly larger
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
In
we
section 3
performed by the
Page 9
monolog algorithms
discuss
We
instigator.
February 27. 1991
— those
restrict attention to
which
dictate
that
all
communication
is
optimal action functions which satisfy appropriate
monotonicity and continuity assumptions. For a given communication length
we compute
in
"almost
closed form" the error and structure of algorithms which are efficient within the class of monologs.
We
begin section 4 by presenting two examples which demonstrate that monolog need not be sufficient for
efficiency
—
a dialog, in
We
which both partners speak, can outperform a best monolog.
sufficient condition for
monolog
show
is
that this condition
then establish a
efficiency: additive separability of the optimal action function.
not necessary by exhibiting a rectangle on which a multiplicatively separable
optimal action function can be efficiently approximated through the use of a monolog. In section 5
show
that all
We
we
of our results are valid even when the monotonicity requirements are dropped as long as
the optimal action function is appropriately separable. Section 6
summarizes the paper and gathers our
final thoughts.
3.
We
will find
it
useful to study a simple subset of the set of communication algorithms: the set of
monolog communication
is
Monolog algorithms
performed only by the
algorithms. Such an algorithm stipulates that for
instigator. If
action y/(di) or chooses from
uninterrupted string.)
which depends on
For defmiteness
If
we
monologs we would
would be
is
is
message k, then her
X
is
is
the instigator.
is
A
parallel analysis applies to
efficient within the class of
efficient within the class of X-instigator
efficient within the class of K-instigator
class of X'-instigator
chooses an action y/Oj^K)
partner,;',
and the message he received.
monolog which
we
bits
the instigator, she either immediately chooses an
algorithms. In order to find an algorithm which
find a
6 any transmission of
2" messages. (In a monolog any bits sent are transmitted as an
efficient within the broader class of
first
say,
consider here monologs in which
of X-instigator monologs
We
/,
the instigator chooses
his coordinate
y -instigator monolog
monolog which
among
parmer
all
monologs.
An
monolog algorithms. For
monologs and a
algorithm with the lower error
the remainder of our discussion
will use the term "efficient" as a shorthand to
mean
"efficient within the
monolog algorithms."
describe a monolog as a partition of
conditions under which
we can
Ex and
discuss the role of immediate action.
restrict attention to partitions
whose
cells are
efficiency and existence of partitions which, loosely speaking, yield a
then solve the efficient monolog problem
—computing both
large class of optimal action functions
common
convex.
We
We
give
discuss the
error in every cell.
—
the error and the algorithm itself
We
for a
and discuss the comparative statics of increasing the
communication budget.
Monolog algorithms
We
as partitions
can fully define a monolog by a (2" +
1
)-cell partition
under which the instigator should immediately
action rules
act or
of
Ex
— which
specifies the circumstances
send a particular message
which specify how each partner would choose an action
if
called
upon
— and
to
do
by choice-of-
so.
We
define
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
February 27, 1991
Page 10
2/1
(B.l)
,
M={\
m).
(B.2)
(B.3)
The (w +
1
)-cell partition
Ex
where each <T,c£x. ^i&M^
The
is
denoted
a„},
cr={cro,cTi
i.e.
of
(B.4)
= Ex, and air\Cj = (d when
<^i
immediate action
cell (To is the
She knows only that
de{x]xEY
cell.
When x^aQ,X
3.)
The
is
called
upon
and therefore that the optimal action
takes the action \i/{[x)xEy) specified in (A. 6),
Figure
i^j.
which
error £o for the immediate action cell
immediately take an action.
to
lies in the
results in the error £({.r}
image (pi{x]y.EY). She
xfy) from
(A. 7). (See
is
eo=
(B.5)
0,
Adding points
o'o
= 0-
supremum
to cTq could only increase the
would be weakly greater
for a strictly larger
in (B.5); therefore the error of
immediate action
immediate action
cell.
<p{{x}y.EY)
\
sup(p{{x]y.EY)
x)xEy
U{a:}x£k)
y/{[x}><.EY)-
*
)e{{x}xEY')
\r\\(pi{x)
(b)
Figure 3:
The remaining
xEy)
(c)
(a) The set of 6, (b) the image under cp, and (c) the best-approximation
and the worst-case error when X immediately announces at x.
m
cells are the
message
cells.
When x € <7,, ieM,X
sends the message
in order to
/
inform Y that xea,. Y then knows that ^€cr,x (y} and therefore takes the action y/(aiX {y}), which
results in the error e(cT,x {y}). (See Figure 4.)
e,= sup£(cT,x{y}).
y&Er
The worst-case
error
e,
when
X
sends message
/
is
(B.6)
1
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
we were
supremum of
add points
to
If
February 27. 1991
Page
to a,, then for
each y the error
error
is
achieved,
the
say that y*
eccr,
x
at
which the worst-case
(B.7)
{y}),
a worst-case y value for
is
y*
cell. If there exists a
such that
i.e.
y*€arg max
we
x (y}) would weakly increase, causing
£:(cr,
these errors to weakly increase as well; therefore the error of a strictly larger message cell
weakly greater than the Tror of a smaller message
is
1
<t,.
<pix,y)
A
x{y}
O-/
x{y})
9(<^i
\
e(C7,
y/iCTi
x{y})
X{y})
iSUp(p(c7,-
x(y})£((^i
X {y})
x{y})
inf^((T,-
i-^" X
0-,
(0
(b)
(a) The set of 9, (b) the image under cp, and (c) the best-approximation
and the worst-case error when X sends message for a given y.
Figure 4:
/
The
error of the algorithm
a
is
the largest individual cell error,
i.e.
£=max(£Q,£i,...,eJ.
The designer's
task
is
to
(B.8)
choose the partition
a
of Ex which minimizes
e.
Immediate action and efficiency
If the
immediate action
cell
ao of an algorithm
<yo*0. we say that O" is
immediate action cell? To answer this
partition; if
immediate action
single point,
not only his
its
cell
associated error £,
own
ceU from another
if
cell: If a
partition.
we now
message
When
than the error of the
X has
a
—>m
Cq
is
1
—> m
turn to a significant difference between an
cell a,,
ieM,
is
a singleton,
if
i,
i.e.
consists of a
Y would know
some message
cell is
to transfer a single point to the
precisely
empty,
it
empty message
On
a singleton, say <To= {x}, the associated error e({x}
the
xEy)
uncertainty about Y's coordinate.
partition cr
1
we were
is
Therefore efficiency can never require that some message ceU be empty.
cell.
—> m
if
a
does efficiency require an empty
zero because, after receiving message
the immediate action cell
1
question
the error of the algorithm
can be positive because
Consider a
is
O^m
empty, we say that
coordinate y but X's coordinate x as well. Therefore
would not increase
other hand
and a message
a
partition <T is
whose
partition,
error
i.e. if
is e. If
£({jc}
for
some i€£x
x£y)<e,
then
it
the error of immediate action
would weakly decrease
is
less
the algorithm's
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
we removed i from
error if
We
would say the
-^
1
m
its
February 27, 1991
Page
message
partition
is
vefx
say that the
1
—> m
Convex algorithm
We now
(€M^
cr,,
a
convex
1
its
opportunity to weakly reduce
its
partition, then
it
would
empty immediate action
eschewing immediate action
is
cell. In this
efficient.
—those of
a=
form
the
(T„} such that each
(cTo.cti
an interval). Convex partitions are especially tractable compared to more
representing the cells, e.g. (7o=[a,xo],ai
function
if
I.e.
will in
which guarantee
cp
that
=
Theorem
later, are
loss of generality restrict attention to
we can
not convex,
is
exhibit a
numbers
convex
convex
partitions;
whose
partition
error
is
(These monotonicity assumptions, as well as additional
We
not as restrictive as they might seem.
of our results can be easily extended to a
m
In order to take advantage of their
impose monotonicity conditions upon the optimal action
less than that of the original partition.
assumptions imposed
i€M,x„ = b.^
iXi.{,Xi],
1
we can without
presented with a partition which
weakly
case
partitions
set (i.e.
we
all
strictly increase
general partitions of [a.b] because they can be almost completely specified by a set of
structural simplicity
action cell.
action cell. If on the other hand for
-»m
even a single point into
consider convex algorithm partitions
is
,
squanders
it
nonempty immediate
partition is provident;
empty immediate
to the previously
immediate action error exceeds the error of the
the
the algorithm's error to incorporate
we
it
improvident because
error through the incorporation of a
its
and added
cell
1
much wider
wiU see
Theorem
in
8 that all
class of optimal action functions.)
Conditions under whicft convene partitions are sufficient
Theorem
For each >'e£y,
1
on Ex, and
is £.
Then
that
there exists a
The
error of
cr is
convex
let cr
partition
no greater,
i.e.
will be at the left (respectively right)
decreasing),
Proof
i.e.
&oBa
(respectively
let
=
{
(p{x,y)
cTq, (Ti
(T=
,
and e(\x}
.
.
(p(,-,y)
£<e; and (D
if
in the
Ex whose ertor [from (B .8)]
&„} of Ex, whose error we denote by e, such
}
be a partition of
the immediate action interval
all
(p
and e(
{
•
yeEy-^ For
}
These
m
is
nonempty,
it
some
x<xo would
xq, the
are continuous and that the
assume
that both of the
we demonstrate claim ©. If
monotonicity of £({j:} xEy) implies that the
First
be weakly lower; therefore the error of the algorithm
cell all values in the interval [a,xo].
replace (Tq by [a, SupcTo] without increasing the error of immediate action.
Now we show ©.
continuity)
x Ey)
definiteness
would not be increased by incorporating within the immediate action
we can
do
weakly increasing (respectively weakly
is
weakly increasing sense.
an algorithm specifies an immediate action for
Therefore
functions of x
dosb).
has the same sense for
immediate action for any
(T;„
end of Ex if£({x} xEy)
monotonicity assumptions are satisfied
error of
.
{(to, d"i
For simplicity of exposition assume that
monotonicity of
.
xEy) be weakly monotonic
Consider the
i-th
message
cell.
Thanks
to monotonicity (and temporarily
assumed
we have
numbers do not themselves specify the particular closedness decisions for each
assumption, the significance of the closedness decisions
More general and more
cell.
When we make
is nil.
detailed versions of the proofs offered here appear in
Kofman and
Ratliff [1991a].
an additional continuity
3
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
inf
^<T/ X
=
} )
I}-
^Kinf <T„
}
)
=
i((p(sup
cT,-,
Page
when Y
>)
acts after receiving
message
through
Because
£(cr,
x {y}) would be unchanged
error
its
from (B.6) would be unchanged
£,
CO
(cotTo.cocTi
cTn,}
in
is
supremum and infimum, which would be unchanged
cr, is
set.
/
- (p(inf cT,-, >-)),
whose only dependence upon
convexified this
1
><).
Therefore for any yeEy, the error
e«7,x {y
February 27. 1991
such a
way
that
each
We
well.
as
(t, is
for every y by convexification of
construct
convex and
(7,
a
if
we
the
O",,
by refining the covering
Q
c COCT,.
The importance of monotonicity is exemplified in Figure 5 in which two optimal action functions
^mono ^j (^°", horizontally monotonic and nonmonotonic, respectively,
are plotted as functions of x
for an arbitrarily chosen y.
half of the figure
the oscillation of
—
The nonconvex subset
the horizontally monotonic case
<p"^°"°
the union of
<T, is
—
it is
two
disjoint intervals. In the lower
obvious that convexifying
and therefore does not increase the
error,
i.e.
(T,-
is
x (y}) and
nonmonotonic ^"°"
cr,
a single point and hence the oscillation and error are zero. After convexification the image
the indicated
new
does not increase
A^(cr,x {y}) = A(p(co
therefore e((T,x {>'})=e(co<T,x [y}). In the upper half of Figure 5 the image of the
over
(7i
segment of values, and therefore the oscillation and error are positive;
points through
convexification results
in
increased error over the
an
i.e.
is
the inclusion of
new domain,
i.e.
e(cocT,x(y})>£(a,x(y}).
(p(CO(JiX{y})
(p(OiX{y})
<p(o-/x{y})
COCT,
Figure 5:
The worst-case
convexification; this need not be true
Sufficient conditions for tfu monotonicity
The requirement
e{{x}
xEy)
that
(p
unaffected by
the absence of monotonicity.
error for a horizontally nnonotonic function
in
of the, immediate action
be weakly horizontally monotonia
be a weaikly monotonic function of
jc
is
(which
is
is
error
easily interpreted; the requirement that
indirectly a restriction
upon
<p)
does not have
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
Febnjary 27, 1991
Page
The next theorem
as obvious an interpretation.
when
states sufficient conditions
(p
1
appropriately
is
differentiable which guarantee the monotonicity of the immediate action error.
Let
Theorem 2
(p(-
y) be either
,
weakly increasing function for
a
weakly decreasing function for
increasing for
all
xeEx or©
Then
be continuous over E.
©
@
weakly decreasing for
the following
when
{
I
mixed
the
}
as
increasing decreasing
We
show
will first
demonstrated
show
that
Because £{{x} xay)
is
is
vertically
(^ is
{
E
or nonpositive over E).
functions of x and y. respectively,
nonnegative nonpositive }
|
weakly
(
,
X's error e({x} xcTy)
increasing decreasing
|
}
is
weakly
and K's error e((TxX {j})
is
horizontally weakly {increasing [decreasing}.
© implies the
inf(Tj'
claim
first
=
weakly increasing
(Pxy is
© ^> ©
partial is
Let
similarly.
> 0. (The continuity of
We now
that
nonnegative over
Cx'^Ex and OyClEy-
as
}
|
= ^((p(x.d)-<p(x,c)). This
(Pxy
cp is
(i.e.
© weakly
are equivalent:
^e weakly monotonic
errors e<{x} xcTy) and £((7x>^ (v))
I
are
two statements
be either
let (p{x, •)
a
Let dcp/dx, d(p/dy, and d^^/dxdy exist and
The
increasing decreasing
Proof
xsEx-
E
Specifically,
weakly
y^Ey. Further
d'(p/dxdy has weakly constant sign over
for every choice of subsets
(
all
all
yeEy oxQ)
all
SWQ ay = d
(Pxy'^Q and (py>Q.
and
in
x because <Px(.x,d)><Px(x,c) for
which
weakly increasing, we know
(py
(p^y
>
.
The other cases
Because q>y>Q, ei{x\y.aY)
c
used to guarantee that
for the case in
of© when
all
xeEx
thanks to
- (Pyx-)
and
in
which e({x} x Cy)
that (Px(x,d)>g>x(x,c) for
is
weakly increasing.
a]lx€Ex and
all
ayczEy.
Therefore
<P.ix,y^h)-cpxU.y)
<Pxyix,y).\\m
for all
x€ £x and y € int Ey. The
result extends to all of
£ due
to the continuity of
©
q)xy.
Equal-error convex partitions
For the remainder of our analysis of monolog algorithms we
functions
(p
which
satisfy the hypotheses of
Theorem
1.
restrict attention to
Therefore
we can
optimal action
without loss of generality
confine our consideration to convex partitions.
We now
direct our analysis
worst-case error in every
cell.
toward those convex partitions which
Theorem
given "equal-error" convex panition
3 establishes conditions
is efficient.
Theorem 4
result, loosely speaking, in the
under which
we can
same
be certain that any
establishes conditions under
which we can
be certain that such an equal-error convex partition exists.
'
The implications of these sufficient conditions are obviously stronger than we need to apply Theoretn 1 to X-instigator algorithms: they
are applicable when Y instigates as well. In addition, these conditions will be sufficient for the satisfaction of stronger hypotheses of
later
theorems.
m5
>
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlifl
We
say that
cr is
We
say that
=
ei
We
1
=£„
a
say that
—> m
If a
partition
l^>m
(B.9)
partition if
(To
= 0.
an equal-error partition
We
if
(B.IO)
it
is
have previously defined the terms provident and improvident with respect
—> m
defme any equal-error
same communication length could possibly have
partition with the
[xi,b], which
we assume
o={ai,&n}y with
lower
error. If
choose X\<x\
it
error
Now
cell).
^= max
—»
= £^. Assume
provident
(i.e.
must be
efficient;
a lower error.
(Ji
As an
= [a,x\) and
further that, for
all
xeEx,
efficiency does not require a
Let
its
intercell
boundary be
£i<£ and eq<e.
both
in order to shrink cTl relative to <Tl.
jl\.
In order to
new
This
partition cannot have
make £i<£, we would have
However, thus shrinking
<Tl
makes
to
(Tr a larger set than
and therefore £R>e.
Theorem
For each
3
yeEy,
on Ex- Let
-> m or
exist a panition (whether
Sketch
of
Proof
The proof of Theorem
which
some
some
a
1
consider any other convex partition with two message cells,
{Si, in).
we would have
did
is
it
c7= {cTl.<7r}, where
cells,
to be equal-error with £ = £i
sufficiently large that this partition
is
nonempty immediate action
(Tr
to
partition to be provident.
3 will tell us that if a convex, provident, equal-error partition exists then
£({x} xEy)
a
partition or an equal-error
conve?(j provident, ecjuaC-error partition ep(ists, it is efficient
no other
=
^m
either an equal-error
example, consider a convex partition with two message
a'R
1
if
cro^0.
and
We now
Theorem
i.e.
is
partition.
partitions.
and
an equal-error
cr is
Page
0—>m
an equal-error
£o=£\ = --=£m
February 27, 1991
cell
states that if <j
cell d,
a^ of
1
3,
and
(T
—> m)
which has a lower
given in
&
are
1
-»m
is
full in
two
of the second partition
to be a
qKx,y) and £({x}
xEy) be weakly monotonic
is
error.
Kofman and
Ratliff [1991a], relies
distinct partitions with the
a strictly larger set
a provident
1
—>m
partition because otherwise
—and has
partition, then
£>£o
lemma
cells,
weakly larger error
then
—than
any potentially lower-error
common
x Ey)>£.) Therefore
error of the equal-error
shown: that either the left-hand cell of (J is strictly larger than the left-hand cell of cr, the right-hand cell of
CT, or one of the interior cells of (> is strictly larger than one of the interior cells of cr. This
we are not comparing errors based on a subset relationship between a message cell and an immediate action cell.
Actually, a stronger claim
strictly larger
assures us that
a
a
Q
partition.
is
upon
same number of
inf;c6[a,t]e((x}
the error of this different partition will be at least as large as the
d
functions of x
be a provident, equal-error, convex partition. Then there does not
the first partition.' (If <t
would also have
let
is
than the right-hand cell of
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
February 27, 1991
Page 16
Continuity impCies e?(istence of an equaC-error partition
By
we
requiring continuity of the optimal action function
are guaranteed that an equal-error partition
exists.
Let
Theorem 4
(p
be continuous and for every
monotonic functions of
equal-error
error
0—>m
—
> /7T
—> m
1
-^
1
partition. (Therefore there
partition is
Sketch
partition. If this
weakly
m
x.
Then
in
always exists a provident equal-error
less than the error of the
Kofman and
Ratliff [1991a], has
—» m
1
— m
>
= [0,x\) such
x\ of 0\
Continue
in this
case
that £i
is
its
=e
is
Now
[see (B.6)].
x„=l
is
©,
that the
some
-^
\
m
tr,,
partition
(^Xm<l
is
1
-^m
is
guarantee that x^(e)
is
a continuous function of
is
is
given
determined, or
partition has
® and ©.
achieve cases
provident (the
that £2
an existence
= £•
© the right-hand
yet to receive their £
been found. In cases
©
By choosing
e
The continuity hypotheses
e and therefore that a value for e can be found which will
3
©.
result in the desired case
Theorem 4
which
and find the endpoint
e must be increased or decreased, respectively, and then the process repeated.
we can
error of this
aj = [x\,x2) such
i<m, remaining which have
the desired unique equal-error
sufficiently small or large, respectively,
unique equal-
The
full proof,
sufficiently small £
find the endpoint X2 of
determined,
reached and there are ceUs
error allotment. In case
exists a unique
conceptual substrate in the following iterative
straightforward): Fix
fashion until either Q)
boundary of [a,b]
the
partition.)
strictly
partition.
we assume
procedure, where for definiteness
modification for the
m, there
partition is improvident, then there also exists a
Proof
©,
and s{{x} xEy) be
(p(x,y)
let
This theorem probably seems intuitively plausible to the reader. The
of
and
y^Ey,
for all positive integers
However,
result.
it
easy to see
is
above sketch of the proof provides an algorithm
to actually
how
the iterative procedure described in
compute an
efficient
monolog algorithm
given an optimal action function satisfying the assumptions of the theorem.
The theorem suggests
1
->
m
partition
minimum
the following strategy to find an efficient algorithm: First find an equal-error
and determine
error i.
To determine whether
error of immediate action. If this error
Otherwise, find an equal-error
Monolog
The
its
error
—» m
panition;
it
is
this partition is
weakly larger than
e, the
partition
is
efficient.
under horizontal additivity
task of finding an efficient
monolog
signed mixed-partial requirement of
i€M,
—> m
will be efficient.
is
greatly eased
when
the optimal action function satisfies an
additional vertical monotonicity assumption. (Satisfaction of this assumption
ffi,
1
provident find the
Theorem
2.)
We
is
implied by the constant-
can then determine the error over any message
simply by evaluating the optimal action function
(p
cell
along a single, worst-case horizontal
segment. This simplification yields "almost closed form" expressions for the error and the cell
boundaries of an efficient partition.
7
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlitt
Theorem
Let
5
(p
February 27, 1991
Page
be continuous and
weakly decreasing for
X
when
sends message
decreasing in
O
/,
Define
^
y&Ey.
all
viz. e(<T,x (y }), is either
be either weakly increasing for
Further,
let cp
© weakly increasing
-^ m partition
1
a
of
[a. b]
whose
ertor
y&Ey
all
in
y for
©
all
ffjCzEx or
and y* = c
in
© weakly
©.
case
is
J<p{b.y^)-(p(ay)\
^5 j^
2m
^x) = (p{x,y*). The
cell
boundaries of
c
are determined (uniquely if the horizontal monotonicity
by
is strict)
supcTie<p~V<^(nnincri)±2H),
keM,
or
be such that the error, given y,
<T,c£x- Define the worst-case y-value y* = d\n case
There exists an equal-error
^
of
y for all
let (p{-,y)
1
and by min G\ =
a,
(5.2)
where the sense of the "±" corresponds
to (p{- ,y*) increasing
and decreasing,
respectively.^
©
Let e({a:}
point
ibesi
=a
x£y)
be a weakly monotonic function of
(respectively
ib8si
= 6)
if f((jc}
x£y)
is
j:.
Define the best immediate announcement
weakly increasing (respectively weakly decreasing).
Define the immediate action ertor function to be
If £^o(^bGsi)
^
£. then
Defme x„ = b
a
is
efficient.
(respectively i;„
Otherwise, there exists an equal-error
= a) when
ibesi
=^
0->m
partition
(respectively ib«st = ^) ^nd define the
6
message
oi[a,b].
cell ertor
function to be
^^^^_
\<p(i.,y*)-(p(xo,y*)\
(5 4)
2/n
There exists
xoeEx
action interval
(5.2)
—where
such that eo(^o) = £(^o). and the error of
d
is
£ = £o(xo) = £(xo)<e. The immediate
is
d"o= CO {ib«»i.-^}- The cell boundaries of an efficient partition are again determined by
i
is
replaced by i
— and by
min
<Ti
= io
(respectively
min a\ = a) when e({x} xEy)
is
weakly increasing (respectively weakly decreasing).
Proot
I
From
that the ertor
the definition of y* and the monotonicity of <p{-,y) and £(CT,
over message
cell
i
is
e,= sup£(cT,x{y})=£(<T,x{y*}) = i-|^sup(T,-,y*)-^infcr„y*)|.
2
ysEr
The
'
partition is equal-ertor, so the
We
common
use ^"' to denote the inverse image of ^, viz.
message-cell error
^'(z)= \x^Ex-
^•'^)
= z}
is
x
{
•
}),
we
see from (B.6)
February 27, 1991
Page 18
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
e = ;^
y
e,-=
The
(5.4).
<p(^r\\a\,y*^
I
where the message
and
-L| ^sup a^. y*)
-^ S ^sup Gi, >*) - ^(inf (T„ >*)| =
cells are labeled
such
that, for all
iJeM,
/<;'<=>inf ct,s inf
error over the immediate action cell from (B.5)
cTy.
given by
is
|.
This establishes (5.1)
The equal-error
(5.3).
requirement then determines io- The boundaries defined by (5.2) are easily verified to result in equal-
©
error cells.
A
'E?(ampCe 3:
muCtipCicativeCy separaSCe aptirnaC action function
As an example we
= b-a and ^y = d-c.
^jc
the hypotheses of the
therefore y*
Theorem
will apply
—and
=d
We
5 to the case where (p{x,y)
= xy on E = [a,b]y.[c,d]c'R^.' Let
.
observe fiom Theorem 2 (because d^<p/dxdy=
Theorem
including that e(a,x {}'})
5,
1) that this
= ^(Sup(T,-inf cT/)^
function satisfies
increases in y
that
£{{x]y.EY) = hx^y,
increases in x.
^
The
(B.ll)
error for an efficient
J(p(b,y*)-qKa,y*^\
,
^
—>m
partition is
found from (5.1)
to
be
(B.12)
2m
we
the cell boundaries
Supo-i =
1
d^x
^
2m
To compute
— and
-,
ad + lk
dAx
note that
=a+
,--1/
(z)
(p
= z/d and from
we have
(5.2)
kAx
2m.
m
(B.13)
,
indicating that each cell has the constant width Ax/m.
It
will be efficient to
have a nonempty immediate action interval
possible immediate action error
i.e.
a
0—>m
is less
partition is required
(TQ
= [a,xo) only
than the error without such an interval, viz. £{{a}
if
the smallest
x£y)=
iaA.v<£;
when
(B.14)
^-^>aAy.
m
When
(B.14)
message
is satisfied,
cell error e(A))
we
find io
= dib-Jio)/2m,
by equating the immediate action error
^^l__bdAy_
2
mAy + d
and the
yielding
jeo=—^^—
mAy + d
Substituting (B.15) into eo(io).
eo(W = i^oAy
(B-15)
we
find that the error for the algorithm
is
(Bjg)
9
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
A
February 27, 1991
Page
calculation similar to that yielding (B.13)
^^<-ii- =
may + a
mAy + a
which we note
is
weakly
that the
message
cells
have the constant width
(B.n)
:«,
width of the immediate action ceU.
less than the
Summarizing both cases we
(respectively i)
shows
when (B.14)
is
1
problem
find the error of any efficient partition for this
(respectively
is
not) satisfied.
We
Theorem
will see later in
generalize this result to apply to any muUiplicatively separable optimal action function,
form q){x,y)=f(x)g(y), providing neither f (Ex) nor giEy) contain zero
to
8 that
i.e.
be i
we can
one of the
as an interior point.
Comparative statics on the communication Budget
It is
upon the
effect
a
interesting to vary the
number of
bits
n
at
our disposal
—our communication budget —
structure of and choice of instigator for efficient monologs. First
nonempty immediate action
xEy)
increases in
note that the size of
must shrink with an increase
interval for an efficient algorithm
see this assume for defmiteness that s{{x]
we
to see the
x. If to
the contrary
m
in m.
To
and xo both increased,
then eo(^o) from (5.3) would increase but e(io) from (5.4) would decrease, destroying the required
identity £o(io('"))sf(io(m)).
The
from
error e of a
(5.4) falls
1
^m
from
must distinguish.)
We
results
X
[0, 1].
The
interval over
see this in Figure 6, which shows the X-instigator
—
^m
error e of a
partition
communication budget because the numerator
in the
from the increased length of the
without an immediate action interval
[0.1, 1.1]
(5.1) varies inversely with 2".
more slowly with increases
m. (This
increases with
partition
as a function of the
which
the transmitted bits
monolog
communication budget
(The error for a nonempty immediate action interval
is
error
— with
for (p(x,y)
and
= xy on
bounded below by
e({0.1}x£y) = 0.05.)
We
we
have so
far studied algorithms
which are
efficient within the class of X-instigator
ask the question: given a restriction to monolog,
of Figure
6.
The reader can
easily
make
who
result in
an immediate action interval of
best X-instigator
monolog would have an
K-instigator algorithm
instigator
is
[0,
efficient within the class of
1/32= 171/5472. So we see
communication budget.
With one
bit
error of 11/60. Therefore
monolog has an immediate action
the size of the
should instigate? Return to the above example
an efficient K-instigator algorithm
11/31] with an error of bdAx/2(2Ax + b) = 11/62. The
monologs.
interval
11/342 = 176/5472. However, with an empty immediate
in a smaller error of
Now
the parameter interchanges in (B.12), (B.14), (B.15), and (B.16)
required to find the solution for a F-instigator monolog.
would
monologs.
of
Y
is
Now
the preferred instigator and the
consider four
[0,11/171],
bits.
yielding
action interval, an X-instigator
The
an error of
monolog
that the identity of the optimal instigator
best Y-
results
can depend on
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliti
February 27, 1991
Page 20
-- no immediate action
-O nonempty immediate
action interval
0.05
--
12
3
4
Number
Figure 6: For low n
were transmitted by the
dialog
least
is
we
one
monologs.
bit.
We
interval.
monolog algorithms
Monologs do not exhaust
is
not a monolog: for
some 6
—those
in
which any
bits sent
the algorithmic |)ossibilities, of course.
A
the algorithm requires each partner to send at
presented results concerning monologs which are efficient within the class of
We now
concern ourselves more generally with the problem of finding algorithms which are
efficient within the larger class of all algorithms.
the class of
have an immediate action
efficient to
restricted attention to
instigator.
an algorithm which
is
of bits
Dialog algorithms
4.
In the previous section
it
6
5
monologs need not be
We
will see that an algorithm
efficient within this larger class. (For the
which
is
efficient within
remainder of the paper we
use "efficient" in this stronger sense.)
Dialog can outperform monolog
Our
first
example of dialog superiority
superior to the best
second example
is
An
monolog and because
more reasonable;
modest improvement
is
its
in error relative to
extreme
its
— both because
it
shows
optimal action function
optimal action funaion
is
is
a dialog
somewhat
which
is
infinitely
pathological.
The
well-behaved and dialog shows only a
monolog.
e7(treme CT^ampCe
We
display an example in which a dialog outperforms every
monolog which has
communication length. For any communication length greater than unity the dialog error
action function will be zero and the
monolog
Consider the optimal action function
error will be positive.
the
same
for this optimal
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliti
February 27, 1991
Page
21
x = 0,
(CD
y=l.
Otherwise,
graphed in Figure 7. Now consider the following X-instigator dialog algorithm: X sends the
message "0" if .t = and sends "1" otherwise. If "0" was sent, Y can immediately choose y/ = y with zero
error because he knows X's location precisely. If "1" was sent and >-< 1, then Y can immediately choose
which
y/
is
= 0, again with zero
all,
after
pin
down
(p
y<l
worst case "1" was sent and >>=
chooses y/=\ -x, again with zero
error.
1.
So we see
that with
claim that there
is
no
many
y=l
bits
X
because for
Thanks
only two
communication length monolog which
finite
with zero error in the worst-case. Consider any X-instigator monolog. If
OT
Y sends any message
In this case
bits a dialog
at
can
the value of q>(x, y) with zero error even in the worst case.
Now we
of
X
which
error. In the
will yield positive error. If
we can choose
sends to Y
y=\
to the
X
sends a message, choose as a
test
will determine the value
X
immediately
case
y=l. No
acts, either
matter
how
an a:>0 such that Y's estimate of ^(x,y) will have positive error,
the precise determination of (p(x,y) requires that the value of
symmetry of the optimal action function we know
x be known precisely.
that this conclusion
would hold
if
Y
instigated instead.
Figure 7: Dialog can be infinitely better than monolog.
SI
more reasonaSCe e?(ampCe
We
return to the optimal action function <p(x,y)=xy of
unit square [0,
l]x[0,
1].
We
efficient, two-bit, X-instigator
(B.15-> B.17),
that this
exhibit a two-bit
(i.e.
Example
3
and choose the domain
m = 4), X-instigator
E
to be the
dialog which outperforms an
monolog. As the monolog performance benchmark, we calculate, using
monolog
error
is
Vio with an immediate action region over
[0,
Vs) and four
equally spaced message cells.
immediately acts when a:€<To^ = [0,0.18468). (See Figure 8.) Otherwise X
transmitting "0" when x€CTi'^ = [0.18468,0.63054) and transmitting "1" when
In the superior dialog,
sends the
first
bit,
X
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
A-
€(72^ = [0.63054,
next
bit.
1].
February 27, 1991
Page 22
Y's response depends on X's message.
Otherwise, he listens for a second
bit to
If
receives "0", he takes control of the
Y
come from X.
a\
(Tn
IB
CT^
Figure 8:
oi
erf
A
dialog which outperforms a best monolog.
>'ecTo^= [0,0.41421). Otherwise he sends "0" as the
second bit when >'SC7/ = [0.41421.0.7071 1) and "1" when >'€cr2*' = [0.7071 1, 1]. This then turns the
action decision back over to X. Note that when Y receives "0" from X, Y faces a one-bit, y-instigator,
When Y
takes control, he immediately acts
monolog problem on
instigator,
and
K's
(T2B^
after
X
1].
Y
the
same way we solved
the
X-
n-b'\i,
she then faces a one-bit, X-instigator
first bit,
monolog problem
solution to this problem dictates that she use the second bit to further
knowledge about x
= [0.81527,
it
arbitrary rectangle in the previous section.
has sent the
ai^xEy. The
over the rectangle
refine
the rectangle cti^X(T2^ and solves
monolog problem over an
When x€<j2^
if
into
of the intervals
either
cr2/i'^
= [0.63054, 0.8
1
527
)
or
then takes an action.
The described two-way, two-bit algorithm
results in equal-error cells.'
(The double-headed arrows
in
Figure 8 indicate the relevant actor's worst-case information set corresponding to each rectangle.) This
common
error
is
easily verified to be 0.09234
with "1", X's information set
is
<
Vio- For example,
the line segment
X = sup ai^ = 0.63054, and X's best guess, from (A.6),
results,
We
from (A.7),
in the error
i(0.63054)(l -0.7071
are not at this point asserting that the exhibited dialog
efficient
monolog.
is
1)
when
[x]y.(j2^, where
is v^
X
sends "0" and Y responds
xea\^.
= i(0.63054)(0.70711 +
worst-case,
In the
1)
= 0.53820. which
= 0.09234.
efficient; that is not necessary for
our claim that
it
is
superior to any
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlitf
Monolog
We
February 27. 1991
Page 23
efficient with additive separability
is
have seen above
monolog need not be
that
the optimal action function
monolog
additively separable,
is
We now
sufficient for efficiency.
is
efficient
show
whenever
that
— no dialog can do
better.
By
we mean that the optimal action function is of the form (p(x,y)=f(x) + g(y), where
Ey—* R are continuous. In order to prove this result we can use the upcoming Theorem
additively separable
f:
Ex-^^
and
g:
8 to justify restricting attention to optimal action functions of the simpler
<p(x,y)
= x + y,
(C.2)
on the closed rectangular region
we make
First
<Jy<^Ey- For
form
E = ExxEy<:zU^.
an observation about this additively separable optimal action function. Let
this (p
and for
all
ax c Ex and
generalized rectangles (T^xcT}' the error of an immediate action by
independent of x and the error of an immediate action by K
is
independent of
y.
To
see this
we
X
is
note that
qK{x}xaY)=[((Kx,y):y€(jY} = {x + y:ye(TY],
(C.3)
and therefore
£({x} xcrj')
and similarly
worst-case
for
it
immediate action by
is
says that
it
is
As
+ >':>'€<Tj'}) = J(supcT)'-'nfo'r)-
a consequence, every
it
is
a:
is
(C.4)
a worst-case
x and every y
never efficient to have a nonempty immediate action region.
never efficient to turn control of any remaining
will use those bits in a
that
Y.
{x
is
a
y.
Lemma 6A
says that
= ^(sup{x + y:>'€(Ti'}-inf
bits
over to the other partner,
if
Lemma 6B
that
parmer
monolog. The proof of Theorem 6 then uses an induction argument to establish
never efficient for one partner to ever turn control of any remaining
bits
over to the other
parmer, whether or not that partner will engage in a monolog from that point forward. Therefore in any
efficient algorithm all the bits are sent
by the instigator
additively separable optimal action function,
Let <p{x,y)=x-^y and
Lemma 6A
dialog
—on
a
Proof
cToU
tXi
monolog whose immediate
Consider an X-instigator,
u (T2 = <7x
algorithm
where Gq * 0;
is at least
let
n>
initial
action region
/i-bit
i.e.
c^^.^,
1.
i.e.
^^^
Any
is
only a monolog can be efficient for an
f^-^'-'
'^'-'
"^^^^
n-bit, X-instigator
generalized rectangle
immediate acticm region for the instigator's
instigator
j^
—
^°
"
'-'^
algorithm
crxX(Tyc£ which
— monolog
has a nonempty
some
action will be outperformed by
«-bit, Y-
empty.
algorithm where X's control of the
first bit
generates a partition
which does have an immediate action region. The error £^ of
as large as the error of
or
immediate action eo^ =
Ksup cty
dominated by an equal-error K-instigator one-way algorithm which
-
'^f cty).
this
This algorithm
results in an error
is
no larger than'
(su pcy- infer j')/2m<eo^^e''^- (In Figure 9a the two-headed arrow corresponds to the oscillation of
We
do not assume
that ffy
i*
convex; at worst the one-way error
is
that
which would be achieved over the convex
hull of (ry
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlitt
February 27, 1991
Page 24
immediate action of the original algorithm. In Figure 9b the shorter two-headed arrows correspond to the
oscillation of the optimal action function over X's information set
when Y sends
©
a message.)
Something
happens with
n
bits
CT2'
CTo
(a)
(b)
(a) An X-instigator n-bit algorithm with a nonempty immediate
action region can be replaced by (b), a lower error y-instigator, n-bit
monolog algorithm which has no immediate action region.
Figure 9:
Let (pix,y)
Lemma 6B
= x + y on E and
on (TxxcTy
who
czf'
let
n>2. Consider any
which for some x€<Tx turns control of the second
then implements an (Ai-l)-bit. monolog algorithm.
dominated by an
the first bit generates a partition cXi
(cT,y^}y=i
k,
over to Y
algorithm
this /x-bit, X-instigator
that without loss of generality
u <T2 = fTx-
X, Y does take control of the second
partition
Then
bit
algorithm
is
monolog algorithm.
n-bit, ^-instigator,
From Lemma 6A we know
Proof
«-bit. X-instigator
bit
Assume
that, in
we can assume
response to some message
and implements an (n-l )-bit monolog on
of ay, where k = 2''~K
[Lemma 6A
that
assures us that this
algorithm will not have an immediate action region and therefore
c7,o
cr,
{n-
x
X's control of
z
{
1
,
2
}
cry specified
l)-bit,
=0.] For ye
€
{
from
by
a
K-instigator
1. ...,^}. this
Y-
instigator algorithm results in the cell errors
£y =
Ksup(T/-inf cr/),
(6B.1)
and therefore the error of the original
Now
ye
(«-
define an
n-bit, X-instigator dialog is
l)-bit, K-instigator
monolog
a
by a
(6B.1), ey
= e,y
fory'e {1, ...,k\ so that
£^= maxy {fy} = maxy
{£,y}
<e^.
k\.
(1
This {n -
1
From
)-bit
monolog which
monolog weakly outperforms
strictly
outperforms the dialog.
bounded below by maxy(e,y}.
partition {dy
}y=i
*,
where
cry
=cr,y
for
(6B.2)
the original n-bit dialog; therefore there exists an n-bit
©
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlitt
February 27. 1991
Page 25
The minimum achievable
Theorem 6
error for «-bits for
^x,y)=f{x)-^ giy) on
£,
where /
and g are continuous, can be achieved by a monolog.
Proof
I
Theorem
We
8.
first
prove the proposition for the special case of (p{x,y} = x + y and then generahze via
Lemma 6B
tells
us for the case n
=2
two-bit algorithm on any generalized rectangle
dialog, then, for
some
not be efficient because
let
X
Y would send
x,
it is
is
partition
bit.
However, we know
from our
two-bit algorithm spun-off by each
cr,,
/e
From Lemma 6A, X's
just previous conclusion for
1,2},
{
that
that such an algorithm
dominated by some two-bit, K-instigator monolog.)
We know
we can assume
any
a monolog. (If a two-bit, X-instigator algorithm were a
the second
be the instigator of an efficient algorithm.
a\ u<T2 = 0"x-
that without loss of generality
is
Now
control of the
n=l
consider
first bit
tells
=
3
and
generates a
we can assume
that
Lemma 6B
a monolog. But then
a;
would
that the
us that these
two two-bit algorithms must also be X-instigator algorithms; otherwise our algorithm would not be
efficient.
Therefore
we can
any generahzed rectangle
without loss of generality assume that any efficient three-bit algorithm on
a monolog.
is
By
induction on n
we prove our
desired result.
From theorem
8
we know that the communication problem for (pix, y) =f(x) + g(y) on E is equivalent to the problem
<p(x,y) = x + y on £ =f(Ex)^ giEy). Therefore the efficient algorithm for the general additively separable
optimal action function
Monolog can be
We
Theorem 6
without additive separability
efficient
have seen an example,
efficiency.
Q
a monolog.
is
viz. <p(x,y)
= xy on
us that monolog
tells
is
[0, 1]
x
[0, 1], in
which monolog was
always sufficient for efficiency for additively separable
optimal action functions. This raises the question of whether additive separability
monolog
but actually necessary for
a best
monolog
is efficient
efficiency.
for <p(x,y)=xy
insufficient for
We
answer
when we move
is
not only sufficient
this question in the negative
the
domain
to [1
,
2]
x
[1
,
by asserting
that
2].
This demonstration requires more development than required for the earlier example of monolog
insufficiency. In that case
it
was
sufficient to exhibit a dialog
did not need to claim that the exhibited dialog
exists a
monolog which
dialog and therefore
is
efficient
we must
optimal acticm function
is
on
this
was
efficient.
which outperformed
Now, however,
new domain we must prove
find a best dialog.
Theorem 7
multiplicatively separable,
we can
tells
in
a best
order to
monolog; we
show
that there
the nonexistence of a better
us that, for two bits and
when
the
greatly restrict our consideration to an
extremely small subset of the great variety of conceivable algorithms. This makes the construction of an
algorithm to find a best dialog practical. Running this algorithm for <p(x,y)=xy on [1,2] x[ 1,2] resulted
in the finding that
every candidate for an efficient dialog was dominated by a monolog.
Before stating the theorem
algorithms. X's control of the
we
will develop
first bit
some
notation for discussing two-bit, X-instigator
generates a partition ctq
u cxi u cT2 = £'x = [a,
ft].
If the
algorithm
when xe<Ti,i€(l,2),X maintains control of the second bit as well, then the panition
<'"i0*^O",iU<T/2 = cr, is generated; i.e. message / leads to a one-bit, X-instigator algorithm on cTixEy. If
specifies that
instead the algorithm specifies that
when xea,, /€ 1,2}, K
{
takes control of the second
bit,
then the
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlifl
V
V
u<T/2
ucT,i
partition <T,o
K
February 27, 1991
Page 26
=EY = [c,d]
is
generated;
message
i.e.
/
leads to a one-bit, K-instigator
algorithm on (JiXEy.
minimum
'ine
Theorem 7
error achievable by an X-instigator algorithm for the optimal
action function (p(x,y)=xy on
£clR + ^
can be achieved by an algorithm of the
following form:
The
©
If
i.e. cr,o
cells cTq. O"!.
^d <^2 ^e
convex;
aosa; and
/€{ 1,2}, leads to a one-bit, X-instigator algorithm, then
cr,,
its
immediate action region
empty,
is
= 0.
If the one-bit instigator for cti is different
(3)
infcTj <info"2-
than for
(72,
Y
then
instigates for
(Ti
and
X
instigates for
CT2.
Proot
I
The convexity of Oq and
£i{x} y-Ey).
Consider j€
(If j:€ct,o,
{
1
.
2}
.
then
we
the emptiness of cT/o
both follow from the monotonicity of
could without loss of generality incorporate the interval [a,x] into ctq)
If cr, leads to
Y
instigating with the remaining bit, then the error over ai
is
e,^=max{e,o^e./.•e^7^},
where
e/o^=iAa,sup<T,o^
e,/=iAa,/ super,.
forye {1,2}, where
Aa^supa- inf cr.
This error would be unchanged by the convexification of
This error would be decreased by shifting a, to the
left,
because^this would leave
cr,-.
Ac, -unchanged and
would decrease super,.
If (J, leads to
;6
{
cell
1,
2}.
<T,y.
X
instigating again, the error over ai
Each e,/ would be unchanged
necessary
If
we can convexify
adjacent and translating a^-i to the
establishes
<?,
we convexify
by translating
max
{e,i^,e,2^}.
where e,/ = \dAaij,
and/or translate, either to the right or
cr,i
and
(T,2 to
the right in order to
which weakly decreases the error of
this cell.
left,
the
make them
This process also
©
®.
5.
We
left,
if
ise,^=
Separability and Monotonicity
have thus far imposed monotonicity requirements upon the optimal action function
and the
q>
errors e({x}
XfTy) and £(tTxX {y}) on the domain E. Theorem 8 allows us to relax these assumptions
in
many
cases.
Denote the n-bit
over
E
by
E).
{(p,
U
q>
efficient
communication problem
for the optimal action function
does not satisfy the monotonicity assumptions on E, then
we
seek to transform
(p
(<p,
E)
into
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliti
an equivalent problem i^,^) where
<p
February 27, 1991
Page 27
satisfies the
then be amenable to analysis using the methods
Consider an optimal action function
(p,
assumptions on E. The transformed problem would
we have developed
thus
far.
represented as separable in/(jc) and g(y),
i.e.
such that for
all
(.v,y)€£,
(fKx,y)
= g)(f(x),g(y)\
(D.l)
Defme ^x=f(Ex), £Y = g(EY), and £ = ExX^y- Then/: Ex-^'^,
0:E—*U. The separation in (D.l) can be performed trivially for any <p (e.g. let <p =
for
some function
(p.
giy)=y); the challenge
to find a nontrivial decomposition
communication problem.
the original
intervals
is
and thus
£
the optimal
X
communication problem facing
x^Ex
(D
to
and
ysEy
in the
and Y
is
communication problem
are equivalent.
{<p,E)
of any efficient algorithm
is
Theorem
two ways:
R
to
far
for the
performs the operation
a,
/?
of the
their private
(p(x,
y) or
then to approximate <p(u,v). Because the optimal
under/ and
g,
respectively, these
two
8 justifies this intuitive argument that the error of the
R
for the
<p
as in (D.l).
communication problem
at
each time
t
(cp,
Then
the error of any
E)
equal to the error
is
Y such
= ai(h„x) and Y performs
in the following
be
null,
an action, or the
as a function of that partner's coordinate and
until that time. Specifically,
[fit(h„y)},=o,...^ for
may
that at
it
defines a sequence of functions
any time
and given the history h,,X
/,
the operation b,=P,(h„y).
construct the sequence {di(,h„x)}t=o....jn of operation functions for
original sequence for
are
communication problem i0,E).
communication up
m forX and
communicate
and then to approximate
algorithm defines for each partner an operation (which
{a,(.h„x)},=o
Ex and Ey
equal to the error of the problem i<p,£).
transmission of a message) to be performed
We
in either of
= g(j/)€EY and
v
efficient algorithm
the history h, of
f(x)=x, and
we can conceive
k la (D.l)
function
Consider a separable representation of
Theorem 8
An
action
sensitive only to the images of x and y
communication problems
Proof
be continuous so that
manner we have studied thus
communicate u=f(x)e£x and
action function
and
which allows the desired transformation of
/ and g
require that
<p,
Ey^^,
a rectangle.
is
When we have decomposed
information
We
g-
way. For each ue^x>
X
arbitrarily
for the algorithm
R from
choose some element of
the
its
inverse image,'
M") = typrV«)For each
t,
each u e £x> and each
d,{h„u) = a,{h„n{uy).
The
h,, set
(8.3)
name typ might be inteqneted as "typical" or '1[ake] y(oiirl p[ick]." We use it because other techniques, e.g. taking
minimum, can fail. (The infunum may not belong to the set; the minimum may not exist.) It is, of course, crucial
be a function, i.e. uniquely defined. The only other important property of typ 5, for S*0, is that typ5€5.
function
infunum or
typ truly
(8.2)
the
the
that
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlitt
Similarly, for each
t,
Page 28
let
= typ^''(v).
7(v)
For each
ve^y,
February 27, 1991
(8.4)
each vG^y, and each
h,, set
0,(h„v)=P,(h„r(v)).
(8.5)
R
v)e^
Denote the action resulting from
action resulting from
errors under
R and R,
A
for («,
for
{x,y)eE by Y(x,y), which
by y/(u,v), which results
results in
an enoT£(x,y). Denote the
in the error e(w,v).
The
sets of
achieved
respectively, are
^ = {e(x,y):{x,y)€E},
(8.6)
!={£(«. v):(a.v)e^}.
(8.7)
From
(8.3)
would have
and (8.5) we see that
at (//(«),
\l^(u,v)
X
and Y will behave
y(v))e£ under algorithm R.
at
iu,v)€£ under algorithm R
exactly as they
In particular,
= y/(M(u\y(v)),
(8.8)
and therefore
£(«,v)=£(//(M),y(v)).
(8.9)
Because iu(u)eEx and yivyeEy, we see
supl <
R
of R because R
supi^. Therefore the error
strictly less
than that
is
v)e^,e(M,v)€i^, therefore i <z^. and therefore
than the error of R. However, the error of R cannot be
that for all (a,
weakly
less
is efficient.
(Otherwise the algorithm
a(h„x) = d,(h,J(x)),
(8.10)
0(h„y)=0,(ih„g(y)),
(8.11)
would then have an error i=i<e.) Therefore the error of ^
In Figure 10
we graph
= u + v, we can then
of <^«,v)
symmetrical
9)
in
x and
y;
and that
we
boundaries to be u* = 2k/m
The proof of Theorem
from the
write
in the separable
= u + v on^=/([0,l])x^([0,
sufficient for efficiency
partition of
£
is
the optimal action function <p{x,y)
obviously violates our monotonicity assumptions.
(p(u,v)
R onE defmed by
1])
=
we should have
= s'\n
4;rx
Letting f(,x)
+ sin
4;r>'
= s\n
on
1].
We know
[0, 1]
4;:x, g(y)
form (D.l). Therefore we need
[-1, l]x[-l,
©
equal to the error of ^.
=
x
[0. 1],
s\r\ 4;iy,
to solve the
from Theorem 6
which
that
and
problem
monolog
an empty immediate action interval. The problem
use (5.1) to calculate the efficient error to be
(b-a)/2m= l/m and
is
is
the cell
-\,k€M.
8 [see (8.3)] tells us that
we
find the partition of
by finding the inverse image of each ceU
d,,
E
for the original
problem
i.e.
(T,=rkdi) = -l-sin-i(d,),
4^
(D.2)
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratliff
ieM, where by
for
we mean
sin"'
the one-bit case for simplicity.
^.
The two
two
The
cells of the partition
disjoint intervals,
a
Febmatv
Page 29
the inverse image and not just the principal value. Figure
vertical u axis
for the
on
the right-hand side
nonmonotonic optimal action
Figure 10:
we can
separable problems
this
(p
does not
—
A nonmonotonic
i.e.
y)
= sin 4;rx+ sin
we have
where the optimal action function
requirements on any rectangle
the
convex
shows
partition
a
of
each consists of the union of
£
4;ry
still
be studied.
many
already developed
is
of the form
<p(x, y)
multiplicatively
—even when
=f(x)g(y)
^x nor Ey contain zero as an interior point. (Note that
e({«} x&Y) = \u\AaY> which is not monotonic in u over any Ex
as long as neither
is
in its interior.)
Concluding Remarks
6.
have presented a model of bounded rationality resulting from costly communication
member team
1
monotonicity assumptions, because 0(u, v) = av does satisfy those
the error of immediate action at u
We
<p
but separable function can
study with the techniques
itself satisfy the
which contains zero
shows
1
each of which has the same image under /.
(p(,x.
Similarly,
27, 1991
in a
two-
context in which the mechanism designer confronted the tradeoff between increased
expenditure of resources for communication and increased accuracy of the solution. Our measure of
communication emphasized
We
which
that
communication
is
costly because
it is
time consuming.
completely solved the efficient monolog problem for a large class of optimal action functions
satisfied
determination
—
either
for
monotonicity or separability assumptions.
any given length of communication
—of
communication.
We
we have
have shown
solution
included
the
the optimal instigator, the cell boundaries of
the partition, the action decision rules, and the resulting error.
of communication length,
This
Having computed the
error as a function
thus characterized the tradeoff between the accuracy and cost of
that there exist optimal action functions
such that for some realizations
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlift
February 27, 1991
Page 30
of the private infonnation there will be no communication, even though the right to communicate has
already been paid for.
The explanation
is
that
remaining sUent
sufficiently increases the informativeness of
communication
compensates for the error of the no-communication actions.
instigator could
depend on the
size of the
optimally chosen, predefined situations
in
We
in the
also
other cases that this
saw
more than
that the identity of the optimal
communication budget.
1/>S.
(T2=r(<T2)
Figure
We
The cell boundaries for the original problem are found
from the boundaries of the transformed problem.
1 1
:
have paid particular attention to the question of whether efficiency requires
speak to each other in a dialog rather than that one
We
member engage
in a
monolog directed
exhibited examples showing that the answer to this question could in general
optimal action function
monologs without
is
additively separable, however,
we showed
that both
that
go
one can
members
to the other.
either way. If the
restrict attention to
loss of generality. Additive separability corresponds to an independence of the
parmers' private data.
Admittedly, the information structure in our model
member
— might
seem too
—a
number known by each team
austere to realistically pose a significant communication challenge.
current work-in-progress includes enriching the present
private
single real
knowledge of a point
in a
framework by endowing each member with
multidimensional space. Our research in this direction has already been
informed by both the intuitions and the concrete results of the present work.
interesting multidimensional
of the type
this paper.
we have
Our
We
have found
that
problems decompose into separate instances of one-dimensional problems
treated here and thus directly require application of techniques
we have developed
in
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlitt
We
February 27, 1991
Page
31
see the present paper as one step in a research program dedicated to explaining features of
organizational structure which are insufficiently understood
when
the details of the
communication
process are ignored.
References
Abelson, Harold [1980] "Lower Bounds on Information Transfer in Distributed Computations," Journal
of the Association for Computing Machinery 27 2 (April): 384-392.
Arrow, Kenneth J. [1974] "Limited Knowledge and Economic Analysis," American Economic Review
64 1 (March): 1-10.
J. and Leonid Hurwicz [1977] "An Optimality Criterion for Decision-making Under
Ignorance," in Studies in Resource Allocation Processes, eds. Kenneth J. Arrow and Leonid
Hurwicz, Cambridge University Press, pp. 463-471.
Arrow, Kenneth
Dow, James [1991] "Search Decisions with Limited Memory," Review of Economic
Studies 5S
1
(January): 1-14.
Dr^ze, Jacques H. and D. de la Valine Poussin [1971]
Review of Economic Studies 38: 133-150.
"A Tatonnement
Process for Public Goods,"
and Jean-Jacques M. Laffont [1987] "Limited Communication and Incentive
Compatibility," in Information, Incentives, and Economic Mechanisms: Essays in Honor of
Leonid Hurwicz, eds. Theodore Groves, Roy Radner and Stanley Reiter, University of Minnesota
Green, Jerry R.
Press, pp.
308-329.
Groves, Theodore and John 0. Ledyard [1977] "Optimal Allocation of Public Goods:
Free Rider Problem," Econometrica 45: 783-809.
A
Solution to the
Hurwicz, Leonid [1960] "Optimality and Informational Efficiency in Resource Allocation Processes," in
Mathematical Methods in the Social Sciences, 1959: Proceedings of the First Stanford
Symposium, eds. Kenneth J. Arrow, Samuel Karlin and Patrick Suppes, Stanford University Press,
pp. 27^6 (Chapter 3).
Jordan, James S. [1982] 'The Competitive
Economic Theory 1%
Karp, Richard and Antony
Mechanism
is
Dimensionally Efficient Uniquely," Journal of
(October): 1-18.
1
Ng
[forthcoming] Concrete Complexity.
Kofman, Fred and James D. Ratliff [1991a] "Monolog vs. Dialog in Costly Bilateral Communication,"
Interdisciplinary Group on Coordination Theory Working Paper Series, University of California at
Berkeley.
Kofman, Fred and James D. Ratliff [1991b] "A Comment on 'Search Decisions with Limited Memory':
Waiving the Right to Comparison Shop," mimeo.
Malinvaud,
Edmond
Economics
[1971]
"A
Planning Approach to the Public Goods Problem," Swedish Journal of
ly. 96-112.
Marschak, Jacob and Roy Radner [1972] Economic Theory of Teams, Yale University Press.
Johnny Carson vs. the Smothers Brothers
Fred Kofman and Jim Ratlifl
February 27. 1991
Page 32
McAfee, R. Preston and John McMillan [1988] "Search Mechanisms," Journal of Economic Theory
99-123.
44:
Melumad, Nahum, Dilip Mookherjee and Stefan Reichelstein [1989] "Hierarchical Decentralization of
Incentive Contracts," Graduate School of Business, Stanford University, mimeo.
Mount, Kenneth R. and Stanley Reiter [1974] 'The Informational Size of Message Spaces," Journal of
Economic Theory %: 161-192.
Oniki,
Hajime [1986] "The Cost of Communication in Economic Organization: II," in Uncertainty,
Information, and Communication, eds. Walter P. Heller, Ross M. Starr and David A. Starrett,
Cambridge University Press, pp. 191-212.
Osana, Hiroaki [1978] "On the Informational Size of Message Spaces for Resource Allocation
Processes," Journal of Economic Theory 17: 66-78.
Tirole, Jean [1988]
Walker,
Mark
The Theory of Industrial Organization, The
[1977]
"On
the Informational Size of
MIT
Press.
Message Spaces," Journal of Economic Theory
15:
366-375.
Yao, Andrew Chi-Chih [1979] "Some Complexity Questions Related to Distributive Computing,"
Proceedings of the Eleventh Annual Association of Computing Machinery Symposium on Theory
of Computing: 209-213.
H b 6 2
1-5 7
^'(^
Date Due
0€C 1« wyi
NOV.
8
1995
Lib-26-67
Mil
3
TQflO
LIBRARIES
DDbbSObb
M