Document 11044634
advertisement

LIBRARY
OF THE
MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
ALFRED
P.
SLOAN SCHOOL OF MANAGEMEN
COORDINATING AGGREGATE AND DETAILED SCHEDULING
DECISIONS IN THE ONE MACHINE JOB-SHOP:
•
L.
Gelders and
P.
600-72
R.
I-THEORY
b^rt
Kleindorfer
April, 1972
MASSACHUSETTS
TECHNOLOGY
50 MEMORIAL DRIVE
BRIDGE, MASSACHUSETTS
INSTITUTE OF
MASS.
COORDINATING AGGREGATE AND DETAILED SCHEDULING
DECISIONS IN THE ONE MACHINE JOB-SHOP:
L.
600-72
Jelders and
P.
R.
I-THEORY
Kleindorfer
April, 1972
00.
600-75
Dewe
RECEIVEO
JUN g
1972
I
'*^-'-T. LIBRARIES
COORDINATING AGGREGATE AND DETAILED SCHEDULING
I-THEORY
DECISIONS IN THE ONE MACHINE JOB-SHOP:
by
L.
Gelders and
P.
R.
Kleindorfer
ABSTRACT
This research presents a formal model of the one machine job
shop scheduling problem with variable machine and labor capacity.
Pri-
mary interest is focused on the trade-off between overtime and detailed
scheduling costs.
The detailed scheduling problem considered is minimiz-
ing the sum of weighted tardiness and weighted flow-time costs for
capacity plan (e.g.,
a
given overtime schedule).
are generalized to this case where possible.
tures for the problem are analyzed and
gorithm is outlined.
a
a
given
Sequence theory results
Various lower bounding struc-
preliminary branch and bound al-
Several interesting features of the algorithm and
bounding structures are illustrated by an example.
sults to more complex environments are discussed.
63504S
Extensions of the re-
1
.
Introduction
This paper addresses the problem of coordinating aggregate and
detailed scheduling decisions in
a
job-shop environment.
Typically, the
aggregate planning level determines a medium-run capacity strategy for
workforce, overtime, and shifts.
Given this plan, the detailed schedul-
ing problem is concerned with minimizing operating costs subject to quality control
There is clearly
constraints.
a
tradeoff between capacity costs
and the direct costs incurred in scheduling individual jobs to activity
The problem of concern here is the determination of reasonable
centers.
procedures
for resolving this tradeoff between aggregate and detailed level
costs.
As
a
first step in addressing the combined aggregate-detailed
scheduling problem discussed above, this research studies the problem in
one machine job-shop.
In this context,
a
the problem becomes one of deter-
mining an overtime plan and job processing sequence which minimizes the sum
of overtime costs and direct job costs due to tardiness, in-process inventory, and other flow- time related costs.
et.
al
Following the framework of Conway,
[1967], certain general results are first derived for this problem.
On the basis of these, a branch and bound algorithm is presented for solving
problems of modest size.
Computational results and
a
discussion of the uses
of the framework presented in structuring and evaluating procedures for more
realistic problem settings are given in a companion
paper [6].
Two bodies of literature are relevant to this research -- job-shop
scheduling and aggregate planning.
We first briefly review relevant aspects
of the literature on job-shop scheduling.
The basic problem of sequencing
n
jobs on one machine has received
-2-
much attention in the secheduling literature.
For some regular measures
of performance, elegant and simple results are known, e.g. the shortest
processing time rule for minimizing mean flow time.
However, no such
results are available when certain alternative performance measures are
used.
The detailed sequencing problem of interest in this paper falls in-
to this latter category.
The sequencing problem considered here is formu-
lated as follows:
Problem A
Minimize
j
= job
Z
(p-T. + h-F.)
index
N = job set =
C.
=
{1
,
.
.
.
,n}
completion time of job
d. = due date of job
j
(d.
j
>_
0)
T. = tardiness of job j = Max (0, Cp. = tardiness
r.
=
-
unit time (p-
penalty per
ready time or release date of job
F. = flow time of job j = C
h. = holding cost
d.)
.
-
j
>_
(r.
0)
>_
0)
r
penalty per unit time (h.
>_
0).
The objective in Problem (A) is to minimize tardiness and flow-time
related costs.
When
h
=
o for all
jobs, the weighted tardiness problem re-
sults, various forms of which have been studied by McNaughton 02], Schild and
Fredman [13,1<|, Held and Karp [9], Elmaghraby [4], Emmons [5], Srinivasan [19]
and others.
An efficient branch and bound algorithm for this case has been
presented recently by Shwimer [15].
-3-
Turning now to the aggregate planning literature,
models and results is available^.
a
However, on the normative side at least,
little of this work has been related to the job-shop context.
ous lacuna is
wealth of
A more seri-
fact that only recently have these resutls been related
the
to the problem of coordinating aggregate and detailed scheduling^.
A heur-
istic coupling procedure resembling the structure of the algorithm in this
paper has been developed and evaluated in
by Green [7].
a
simulated job-shop environment
Recent work of Shwimer [16] has further corroborated the
benefits to be gained by coordination of aggregate and detailed scheduling
decisions in the job-shop context.
In this research we assume a simple functional
costs.
Generalization will be discussed below.
form for aggregate
Under the hypothesis of
a
homogeneous and constant workforce, the aggregate costs here are represented
as follows.
^
k=l
^
K =
number of periods in planning horizon
X.
= hours
b,
=
of overtime in period
-
7
=
unit cost of over time in period
In the next section we couple
See Chapters 5
k
1,2,...,K;
k
=
1,2,...K.
Problem (A) with these aggregate
of Buffa and Taubert [1] and references therein.
See Newson [12] and references therein for some normative results for
production processes making standardized products.
-4-
costs and related constraints to obtain the combined aggregate-detailed
scheduling problem of interest.
is
In
Sections 3 and 4, a bounding structure
developed for solving the combined problem.
Section
5
specifies
a
first-cut branch and bound algorithm for the problem and gives an illustrative example.
Conclusions and directions for further research are present-
ed in Section 6.
2.
Problem Formulation
Capacity Plans and Sequencing Results
2.1.
Our initial aim is to delineate the set of capacity plans of
interest here and
Let
a
convenient parameterization of these plans.
a
planning horizon H
be given.
>_
Let q(T)
be the
>^
instantaneous processing rate of the machine (or activity center) at time
The trajectory {qd/rxe [0, H]} is called a capacity plan
Te[0, H].
We will be primarily concerned with
special case of these capacity
a
plans, for which q(T) either equals
1
the machine is available (qCx)
or not (q(T)
1)
a
overtime plans
In order to
for all
=
x.
0).
In this case either
When it is available,
These capacity plans will be called simple
uniform rate.
processing is at
.
=
or
.
specify such plans more precisely, we proceed
as follows.
Partition the interval [0, H] into K disjoint periods where the
start of period
a^^-,
=
H.
Let {X
is called the
Let
.
:k =
1,...,K and where
,
k
=
1,...,K} be
a
set of non-negative integers,
denoted by
is
a.
maximum permissible overtime level in period
{p|,:l<
connotes period
(2-1)
k
k
°k ^ Pk
=
1,...,K} be
regular time
-^
^mk:i
.
'^k+P
a
=
a,
<_
.
.
x
set of non-negative integers, where
=
'-•-K,
so that the maximum permissible overtime level
fits into period k.
Define the feasible overtime set, X, as
±
.
k.
It is assumed that
^
.
P|^
-6-
{xeE :x = (Xp...,x,^); x,^e{0, K-.-.x^^k):
X =
(2.2)
K
n
k=1
^
-^
j=l
^
The last requirement in (2.2) assures that enough overtime will be allocated
to accomplish all jobs within [0, H].
It is assumed that X ^ 0,
i.e.
n
K
k=l
^
^^
For each xeX define
j=l
a
if
^
simple overtime plan as follows:
a,^
£
T
£
a|^
+
P|^
+
X|^,
k
=
1,...,K;
(1
else.
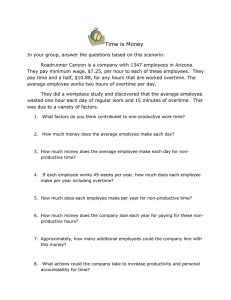
Figure
time
p.
1
represents
a
typical simple overtime plan.
is assumed fixed for all
k,
Since the regular
any feasible vector of overtime levels
XeX determines a unique capacity plan.
In the sequel
we will represent
simple overtime plans by their corresponding overtime level vector
x
the time horizon, periods, and regular time vectors being understood.
--
-7-
<](^,^)
,.
toi.e
^em»ot>
k
^l^
P
I
Tint
a-,«o
^*
<a
ft.
'^^
%^±
A Simple Overtime Plan
Figure
Given
a
1
simple overtime plan q(T,x) the completion times for any
preemptive schedule can be found via the usual procedure of "loading" job
processing times onto the given graph of q(T,x).
To make this loading pro-
cedure more precise we Introduce the cummulatlve capacity curve yij) as
y(T) =
;2.4)
q(T')dT'
I
and define the completion time for processing y units of work starting at
time
T
>
as
K
-8-
(2.5)
C=
where y~ (y')
inf
=
{t'
e
y''(Y + y')}, y'
d' >_0:y(T')
=
=
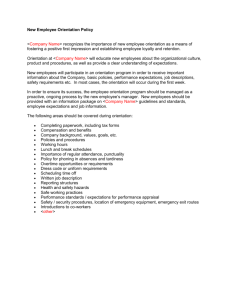
Figure
y'}.
yd).
2
illustrates the relationship
of the loading procedure to the use of the cumulative capacity curve in de-
termining completion times.
t-,
=
In the
example illustrated in Figure
tp = 2, and the schedule of processing requirements given is:
job 1; 2 units, job 2;
1
2 n
{1
=
2,
unit,
unit, job 1}.
DLC
\
DUE
6
Illustrating Completion Time Determination
Figure
2
C
-9-
Note that the schedule derived is preemptive resume (see [2]).
That is, processing on
a
job interrupted by another job or by a non-pro-
ductive period can be resumed without additional cost or time.
in what follows that all
We assume
processing has this preemptive resume property
Generalizing the above example, let
(I-i,
Y^
I2,
Y^,..., !_,
be a sequence of processing and idle time requirements, where I-
idle time preceeding the ith processing segment Y-.
Y
}
is the
It is readily veri-
fied that the loading procedure above corresponds to the following:
(2.6)
y.
=
(2.7)
C.
=
y(C._^ + !•)
inf
i
{t'
e
y'^y.
= 1,..., P
+ Y.)}
^'ic.-i^^-
where Cq
=
and C-
is the
completion time of processing segment Y-.
where more than one non-zero processing rate is pos-
In the case
sible, the t- would be in standard hours of capacity.
Any given schedule
of standard hour processing and idle time requirements would then be translated into (calendar) completion times sequentially by (2.6) and (2.7).
Assuming
a
quite general
(continuous, non-decreasing) cumulative
capacity curve it is possible to generalize certain results of sequence
theory.
Specifically, Conway et. al.
for the case when q(T)
(PI)
=
1
for all
t
[2]
prove the following properties
and r- =
When scheduling against
a
for all j.
regular measure of oer-
formance, inserted idle-time need not be considered.
-10-
(P2)
When scheduling against
regular measure of
a
performance, preemption need not be considered.
(P3)
The maximum flow time
F
max
is
independent of the
job sequence.
(P4)
The SPT-rule minimizes mean flow time F.
(P5)
The weighted SPT-rule minimizes weighted flow time
Fj.
.
"J
Properties (PI)
-
(P4) can be readily verified.
The proofs of
these properties are analagous to the corresponding proofs in Conway et.
al
.
[2
].
It should be noted that these proofs are constructive.
In
the
case of (PI) the proof indicates that one should simply eliminate the idle
In the case of (P2)
time by left shifting all jobs as far as possible.
one can construct from a given preemptive schedule S
a
non-preemptive
schedule which is at least as good by sequencing the jobs in order of
their completion times in
S
S
(i.e.
the job with largest completion time in
goes last, the job with second largest completion times in
to last, etc.).
As an exai^ple, appendix
1
gives
a
S
goes next
proof of (P4).
Of
course, none of these properties necessarily hold when jobs do not arrive
simultaneously, though one could still consider the problem of finding
the best non-preemptive schedule.
The following example shows that (P5) does not generally hold
even in the case of simple overtime plans.
Example
:
Let
n
and with q(T) given by
=
2
with
t^
=
8
t^ = 12
-n-
(2.8)
q(
10 < T
'{;
1
T
£
20,
T
>^
30
1
10.
20
£
T
30
<
It can be verified that the weighted SPT sequence
completion times
{2,
1}
C-j
=
30, C^ = 22 with
E
oj-F-
has completion times C^ = 30, C2 = 8 with
E
1}
has
However, the sequence
274.
=
{2,
w-F- = 242.
On the basis of (PI) and (P2) above we may restrict our attention
when r.
for all j, to the n! permutation schedules (see [2], p. 25) re-
=
presented by the set of permutations n =
i
= j}.
In this case,
{Tr:N
->
N;
7r(i)
=
fT(-j)
implies
since inserted idle time is not considered, the
completion times for given yix) and
tt
e
n are
obtained from (2.6), (2.7)
as follows:
(2.9)
c^i)
<'-^°'
^0
=
=
j?f^/^'^y-Vt,„));
^"^.(J-l))
-
J
=
2.
,n;
tt(J-I)
^^(j)' ^-^(j) ^^^ ^^^ proces^ng time and completion time respectively
of the job in jth position under the given
permutation
tt.
-12-
2.2
Statement of the Problem
The global problem to be solved is as follows:
N
K
Minimize G(x,7r)
(2.12)
X,
=
i<=i
n
=
where
X
where
C
is
is
Z
b.x,^ +
^
^
J^Vk
E
(p.T. + h-F.)
J
j=l
^
J
J/Pj
J
J
"^^^^°' ^j
-
-
'j^ ' 'j^^J
given by (2. 2), His the set of permutation schedules, and
determined by (2.4), (2.9)
-
(2.11).
'j^^
-13-
3.
3.1
Reduction of the Solution Set
Dominance Relation for Overtime Vectors
When all the
.lobs
are simultaneously available and the unit
cost of overtime is constant , it is not necessary to enumerate all the
feasible overtime vectors.
We will
prove that for
given total amount
a
of overtime z, one particular vector x necessarily dominates all the
overtime vectors
z.
(Dominance Relation):
Lemma 3.1
Let X,
Then if
with the same value of
x
b,
eX and suppose the followinq hold:
x'
a)
x^ = x!
b)
X,
c)
hv
= b,
>
k
x'
for
k
and x
f i
<
m;
,
v'
with
j,
<
m;
=
hi
=
1,...,K; 6(x,7t) <_'^(x',Tr),
=
z;
tt
e
n,
where G is given
by (2.12).
Proof
:
Let
times under
be arbitrary and let {C.:jeN} and {C.':jeN} be the completion
tteR
tv
for the given overtime vectors x and
x'
respectively.
From
conditions a-c above and (2.3)-(2.4) it follows that
y(T)=y'(T)
for
y(T) >y'(T)
for
yd)
=
y'(T)
< T <
a^+
Pj^
a^ +
Pjj^
+ x^;
+ x^ < t < a^ + P^ +
for a^ + p^ +
x^;
x-
< T < H;
where y(T), y'(T) are the cumulative capacity curves corresponding to x
and x'
respectively.
14-
In particular, the above implies y(T)
Jj
from (2.9)-{2.n), C. < C.'
>_y'(T) for
kk
for all jeN.
Since Zb.x.
=
Therefore,
t>_ 0.
Sb.x.
'
= bz
and
since weighted tardiness and weighted flow-time are regular measures of
performance, G(x,Tr)
QED
< G(x',Tr).
Lemma 3.1 implies that once
a
given total amount of overtime
z
is fixed,
the overtime should be moved as early as possible in the time
horizon.
Thus for given z, one need only consider the following overtime
vector.
(3.1)
X? = min(z,Xj^^)
k-1
x^ = min(z
Z x?,Xj^,^),
-
k
=
2,...,K.
As a result, one need only consider the set of feasible total
overtime levels given by
(3.2)
Z =
{z = z
.
min
.z
.„
mm
+ 1,
...,z
'
max
}
where, from the requirement in (2.2) that sufficient overtime be scheduled
to process all
(3.3)
jobs,
z^.^ = Max{ E t.
t
j=l
^
The value of z^^
overtime levels,
x^j^,
-
Z
k=l
p.
^
,0j
is determined from the maximum permissible
and the observation that there is no need to add
overtime in periods after which the last job is completed.
is given by
Thus,
z
max
15-
K*
where K*
K is the earliest period for which
£
K*
Z
(3.5)
n
^
k=l
J
+ X
(p.
^^
>
I t.
j=l
^
holds.
Given the above we define
(3.6)
Min {G(x,u):xeX,Ex.
=
g(z,7T)
= z)
= G(x°,7t)
^
k
where x° is given by (3.1).
3.2
Generalization of Elmaghraby's Lemma and Shwimer's Theorem A
It is of
interest to note that Shwimer's Theorem A [15] may
be generalized to the present problem.
for any two jobs
.<
t.
-
p.
, p
h.
^
particular it can be shown that
t
< dj
^ ^ ^]
In
and j, for which:
i
.<
.
.
>.
h.
^
There exists an optimal schedule
in which i precedes j.
The detailed proof is analogous to Shwimer's argument
and is available
from the authors.
Shwimer's original proof assumes q(T)
jeN.
=
1, t>0, and h. - 0,
^
16-
Of more importance from a computational point of view is the
following generalization of Elmaghraby's Lemma [4 ], the proof of
which follows Elmaghraby's original argument and which is also available
from the authors.
Lemma 3.2
Suppose h.
r. = 0, j = l,2,...,n.
= 0,
J
NinN2 =
Let N = N1UN2,
J
4-
Suppose that TT(j)e{k+l
scheduled last under
E t.
(3.7)
<
where d^
)
Then, there exists
=
=
k, and
Tr(j)e {k+1.
jobs in N2 are
Max
=
d.*
,.
.
.
,n}, J£N2
n
<
Z p.T.(tt'^)
j=l
,n}, jeNjcN (i.e.
such that iT*(j)e{k+l
a Tr*en
n
and 7r*(j*)
.
If
tt).
J(d^
...
J
J
I
pJAt\) for
j=H
J
Tren
satisfying
"^
n}, JeNj.
The only difference between the above and Elmaghraby's origina'
formulation is that
q(T) =
(3.7).
1,¥t, then
y(dj,,
y(d|.
replaces
)
)
=
d|.^
,
d^,
in the hypothesis
and the original
(3.7).
When
lemma results from
-17-
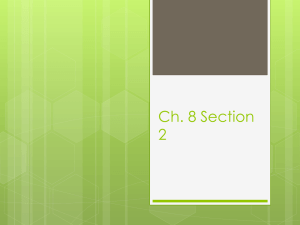
3.3
Tree Exploration Scheme
The set of admissible solutions may be represented in a tree
search scheme as follows:
level
level
1
job j in first
position
level
2
Figure 5:
Obviously,
a
Tree Structure
"Shwimer-like" algorithm [15] may be used for the
exploration of nodes on level
1.
Shwimer's algorithm may be easily gen-
eralized for these circumstances (variable capacity and h.
current problem may be solved by using this algorithm after
enumeration of the nodes on level
1.
In
^ 0).
a
So, the
complete
the next section, however, we
will develop an alternative algorithm which calculates strong lower bounds
for the nodes on level
1.
The method proposed provides automatically
information for bounding the nodes on the lower levels.
4.
Lower Bounding Procedure for Variable Capacity Plans
4.1
Introduction
The problem of concern here is to establish lower bounds on the
scheduling costs of a set of jobs processed under a given capacity plan
and for an objective function of the following form:
(4.1)
where
A
is
Min
Z
-i
jeN
{p. Max(C.
d., 0) + h.F.}
-
J
J
J
-J
J
the set of preemptive schedules subject to W.:^r. (job processing
may not begin until after job release).
available, (PI) and (P2) in
replaced by the subset n of
2.1
)&
When all jobs are simultaneously
above indicate that
i6 in
(4.1) can be
without changing the optimal value of the
case of
It is clear, however, that in the general
objective function.
intermittent job arrivals (r. f 0) preemption and inserted idle time
must be considered (see [2], p. 69).
The bounding procedure established below holds under any capacity
plan and for r.
For convenience, we will
f 0.
restrict the formulation
and the proof of our procedure to the problem of primary concern in this
study, i.e. r.
=
for all
j
Generali-
and only simple overtime plans.
zations to these other cases will be apparent from the comments and
corollaries.
4.2
A Lower Bounding Problem
Consider the problem {?)
Problem (P ):
(4.2)
.
Find
Min
E
n
jeN
p, Max(C,
J
^
-
d,, 0) ^ Min
^
,6
I
JeN
p. Max(C.
-^
^
-
d., 0)
^
-19We now formulate a transportation problem (P-1).
The under-
lying idea is that the above scheduling problem may be seen as a
transportation problem in which capacity units (available in different
time periods) have to be shipped to different jobs.
Problem (P-1)
:
Consider
timeslots
=
i
1
any arbitrary division of the time horizon H into
,2,3,
.
.
.
Such a partitioning of H can be represented
,v-l ,v.
by a set of discrete points T
=
(ti,t2,t3,.
.
.
,t
=
|
ti<t2<_. ..<t <H)
which represent the starting points of the corresponding timeslots.
The problem (PI) then is the following:
V
Find:
(4.3)
L(q,T) = Min
n
E
E
i=l
j=l
a. .w.
.
^J
^^
=
1 ,
=
l,...,n;
n
subject to:
Z w.
j=l
S w.
where w.
=
.
=
s.
.
^^
.
< s
"
,
i
= t.,
j
~
j=l
^^
w.j
^0,
.
,v;
i,j;
all
capacity supply in timeslot
a.-.
J
=/{! + [(t.
I
^
=
.
amount of capacity used by job in timeslot
1
and [a]
.
J
t. = capacity demand of job j
(4.4)
.
-
=
i
Ti+l
=
/
i
q(T')dT';
processing time of job j; and
d.)/t.]}p. for all slots
'
J
J
elsewhere
largest positive integer
< a.
J
i
with
t. >d
'J
-20-
clear that, when a simple overtime plan is given, for any
is
It
arbitrary partition T,
a
unique problem (PI) may be derived from Problem
It is also clear that the set of schedules i^
(P).
corresponding to the
feasible set of (PI) contains both preemptive and non-preemptive schedules
4.3
Lemma
"
M
If
y <t, then
E
y=l
M
M
Proof:
l
<
\iy
y=l
4.4
^
^
=MZy
ZMy
y=l
E yy <M.t
^
y=l
M
^
y=l
<M.t
^~
Proposition
Suppose a simple overtime plan q(T,x) has been fixed.
Then the
optimal solution to problem (PI) is a lower bound on the optimal solution
of (P) for any arbitrary partition T of the time horizon H.
Proof:
(i)
Clearly any feasible solution in (P) is feasible in (PI).
Therefore it suffices to prove (ii).
(ii)
The cost associated with a feasible solution of (P) is
always underestimated by the corresponding solution of (PI).
Consider an arbitrary schedule in S and the corresponding
solution
llw^.
-llof (PI).
of problem (P) is p.T..
to the total
(P)
The contribution of job jeN to the total cost
Let us now calculate the contribution of job
transportation cost of (PI).
and (PI) are zero.
If p. =
We therefore assume p.>0.
the costs in both
j
-21-
Consider two time axes, the original one (partitioned following
T) and an axis
(d. + yt.).
u = 0,1,2,...,
sequel we will
represent
timeslot by its index
fiat-4
T2
—
L
.
La. I
T^=0
a
'P**!
with origin d..
or by a pair
i
—____
7J
.
In the
1
,
sag
Ji+1
(t. ,1.^,)
,
-
'm+1
H
I
I
y=0
^j* "tj
2
^ij
M
3
,
M+1
I
^2
'I
^+1
""3
'
Suppose that the last assignment of capacity with relation to
job
j
w.
?*
.
The first timeslot with
takes place in timeslot m.
is
called
Then, the contribution of job
i.
j
ajj
i^
and
to the total trans-
portation cost is:
m
m
m
Consider now $
= U
(t-,!..-,) and let us partition $ in mutually exclusive
i=i!,
with
sets a
y
(4.6)
%=
UT.,T.^^)la.j
=
ypj},
y=
1,2,
m
M+1
Then from (4.4) $ = U (t-,t.^i) = U a
^=l
y=l
From (4.5) and (4.6) it follows that
L.=
m
M+1
Ea..w..=
Z
y=l
^=l
a..w..
Z
i
ea
y
or
(4.7)
L. =
J
M+1
M+1
Z
Z
yp.w.
y=l
iea
^
.
^^
=
p.
Z y
'^y=l
Z
iea,
w
.
.
^^
I
-22Now, let us define
y
(4.8)
=
^
z
w.
^
lea
y
From (4.7) and (4.8) we derive
M
M+1
We know that:
M
M
I
U=l
=
lly
y=l^
(4.10)
^f/y ^
w.
Z
-
^j
-
< t.
iea/J
^
Z
i
ec^^^
w..
^J
^M.l
Applying Lemma 4.3 to equation (4.10) yields
(4.11)
^f/^ylf^^tj -y^,^)
It follows from
(4.12)
(4.9) and (4.11) that
lP,{M(t,
k-
-
By (4.12) and the definition of
4
^
(4.13)
MM
y„,,)
'M+1
y^.-,
M+1
,
+ 1) M.i>
M+1
we therefore obtain
l"tj*y„,, 'Mtj*
£
V m
Now since Mt. +
J
w.
.
1
J
E
,•
—<
t
-
d.,
m
J
^i^^m
(4.14;
-f-
Pj
<
-
T
m
+ w
.
mj
-
d.
J
w.j+w^j
-23-
+ w_.
But T
-
cl.<C.
d. = T..
-
Since j was arbitrary
1-^12
2
jeN
jeN
-^
Equation (4.14) therefore yields L.<p.T.,
p.T. for any schedule i" i.
-J
L(z,T) < Min Z p.T. < Min E p.T.
J
n jeN
^ jeN ^ ^
(4.15)
Thus
^
(Q.E.D.)
"^
4.5
Corollaries
4.5.1
Let us consider problem (P') defined as follows:
= Min
Min Z h.F
Z h .F
J
n jeN
^ jeN ^ ^
.
.
"J
Then, the optimal solution of (PI) is
a
lower bound on the optimal solution
of (P') when using the following transportation costs;
(4.16)
a.j.
{1
+ [T^-/tj.]}hj for all
x.
The assertion follows immediately from (4.2) and (4.4) by putting
Proof:
d. =
^
and p. = h..
4.5.2.
Since (PI) is
a
linear program, the proposition of
4.4 holds also for bounding the sum of penalty costs and holding costs,
i.e. for
Min Z (p,T. + h.F.)
^ ^
^ J
n JeN
The cost coefficients are then given by
(4.17)
a.j ^/{l + [(t.
{1
-
dj)/tj]}Pj +
+ [T^/t-]}h. otherwise
{1
+ [Ti/tj]}h. for T.>d.
-24-
The procedure described above may be used for bounding any convex
4.5.3.
piece-wise linear cost function of completion time as such
a
function may
be considered to be the sum of linear penalty functions of the form con-
The individual cost matrices simply add together,
sidered in section (4.4).
The lower bounds obtained by this procedure are clearly a function
4.5.4.
Now consider two partitions T and
of T.
T
=
{-^I'^e-'-^n'Vl
(4.18)
...^v^ and T' = {t^ '12'
T^.
"^n
T^
It follows from the
L(z,t) £L(z,T').
T'
= T.' for
i
V- ^'n+1
=
t'.^
for
•
.
.t^'
.
.
.t'
}such that
l,...,n
=
"
of H such that
i
=
""'n+Z
••'
-
^'n+p+1 "
Vl
n+l,...,v
definition of the cost coefficients
a.
•
in
(4.4) that
Thus the finer the time divisions the better the
bounds.
4.6
Extensions
The results obtained above may be generalized in the following way:
4.6.1
When dealing with other than simple overtime plans, it can be
verified that an analogous bounding procedure can be used.
to multiply the costs a^
Max q(T)
0<T<H
>^
1
.
by a factor X^ = ^^^
,y
It suffices
provided that
-25-
The generalization to the case of r. ^
4.6.2
is obvious.
The cost
coefficients to be used are
6,j{l ^ [(T.
(4.19)
-
d.)/t.]}p. .
{1
. [(T.
-
r./t.]}h.
'°^^i^^J
,..4i
M for T.< r.
where
t
1
if x-
^^
>
-
1
=
6.-.
d.
J
(0 otherwise
and 4.6.2 is completely similar to the
The detailed proof of 4.6.1
proof given under 4.4, and it is available from the authors.
Let y(x,S) be the detailed sequencing costs for a given overtime
4.6.3
vector X and schedule Se^, i.e.
y(x,S) =
(4.20)
Suppose
x'
< x"
(i.e.
X||,
< xj;,
schedules corresponding to
y(x",S").
1
,.
.
.
,K).
Let S' and S" be the optimal
Clearly y(x',S')
and x" respectively.
x'
<
>^
y(x',S") or
y(x',S')
(4.21)
(4.22)
=
k
By the minimality of S',S" it also follows that y(x",S") <
y(x".S'), r(x".S').
In
Z (p.T. + h.F.)
^
^ ^
^
j=l
-
y(x".S')
<
y(x',S')
"
y(x",S")
<
y{x',S")
particular
Min {y(x,S)
-
y(x',S)} < y(x', S')
SeA
< Max (yvx.S)
-
y(x',S)}
-
y(x",S")
-
(x",S")
-26-
It is
possible to determine bounds on the minimum in (4.22) by
"transportation" methods similar to those employed above.
(t-,,...,!
)
Let T
Forx',x"eX,
be a partition of H into time slots,
=
x'
£
x",
consider the following problem:
Problem D
:
Find
V
D(x',x",T)
(4.23)
Min
=
n
Z
Z
i=l
j=l
c
•
-w.
^-J
^^
subject to:
n
(4.24)
^
w.. < s.(x"),
^^
j=l
=
i
l,...,v;
^
V
(4.25)
Z
(4.26)
where w.
(4.27)
.
w.. = t.,
i=l
^^
vt..
> 0,
j
=
l,...,n;
^
=
i
v;
1
j
=
l,...,n.
is the time allocated to job j in time slot [t^-,t^-^.i] and
s.(x")
/^''^ q(T,x")dT,
=
i
=
l,...,v;
^i
h.
(4.28)
-C
1
Qi
^i
< ^j
J
S-J
(h.+
pj
-Vr^
^j
Qi
1
^i
1
in which
(4.29)
Q.
=
Y
(q(T,x")
-
q(T,x'))dT,
i
=
l,...,v.
where
-27-
Proposition 4.6
For every partition
.
T and for all x',x"eA with x' < x",
D(x',x",T) < Min {yCx'.S)
(4.30)
y(x",S)}.
-
Se>S
Proof
Let Se<l be arbitrary.
:
of job
j
under
S
T^.
be the completion time
for the given overtime levels x',
by definition of q(T,x), Q.
until
CUS), C."(S")
Let
is the difference in total
over that available under
assumption that r.
= 0,
x" respectively.
x'
until
Then,
overtime under plan x"
Therefore, (under the
t..
for all j),
CJ(S) > T. implies Cj(S) > C^:(S) + Q^
(4.31)
For the given S let ||w..||=
corresponding to S.
||w^.
.(S)l|
be the time slot-job allocations
Define
V
A.(S,x',x",T)
(4.32)
(i.e.
=
E
C..W.
.,
j
=
the total problem D cost associated with job
l,...,n;
j
We first show that
Y-(x,S) be the actual detailed cost of S under xeX.
Y.(x',S)
(4.33)
-
Let
allocations).
Y,-(x",S) > A.(S,x',x",T). j = l,...,n.
J
J
J
Let I.e{l,...,v} be the latest time slot in S under x" for which there
is a job j allocation.
(4.34)
Tj
If C'.'(S)
1
n.C'.(S).
(4.35)
< d.
Thus,
<
<Tj
Cj"(S)
then since C'.(S) >
J
J
^^
and w.j(S) = 0,
C'.'(S)
J
i
I.
>
it follows that y,-(x',S) >
J
Thus, from (4.31),
Yj(x',S)
-
Yj(x",S) ihj(C^.(S)
-
C^'(S))
>
h^Qj
.
-28-
But C';(S) < d.
implies that T.
< d
ij
J
J
c..
(4.36)
.
and by (4.28)-(4.29) we have
J
<Cj_j=:J-Qj_,
i
=1,....!..
V
Therefore, since
Z w.
J
-1
.
'
i=l
=
t.,
J
':
(4.37)
Z
c. .w.
=
.
Z
'j
c-.w.. < Ct
I.
w.
.
=
h.Q,
which with (4.35) yields the desired result (4.33).
If CV(S) > d., then since C'.(S) > C':(S), job
J
J
both plan x' and x".
(4.38)
.
j
will be tardy under
J
J
Therefore, from (4.31)
Yj(x',S)
-
Yj(x",S) = {h. + Pj)(C'.(S)
-
(hj^Pj)Ql..
But by (4.28) it follows that
h. + p.
(4.39)
Therefore,
c.
< c.
.
<-J^
iQj
,
i
=
1....,!..
C^(S)) >
-29-
K
i
Z
(4.41)
(x"
b.
K
< D(x',x",T) < y(x'.S')
x/) -
-
K
-
y(x",S")
K
l^^l
particular, if
In
b,
= b,
then one need only consider those z levels
for which
D(x°(z),x°(z+1),T),
>
b
(4.42)
The cost structure of the above problem
where x°(z) is given by (3.1).
implies for all zeZ that
D(x°(z-l),x°(z),T) > D(x°(z),x°(z),x°(z+1),T).
(4.43)
Therefore, we may restrict attention to the set of total overtime levels
by
given
J Z
3
=
(f , z
max
z
mm
.
where t is uniquely determined by
D(x°(f-l),x°(f),T)
(4.44)
or
)
> b
>
D(x°(2),x°(f+1),T).
which ever is greater,
Finding f in (4.44) is very simple given the monotonicity relationship in (4.43).
4.7
For example, binary search
on
[z^in'^^max-'
^^" ^^ ^^^^'
Convexity of the Lower Bounding Curve
In the case
(4.45)
r.
= 0,
jdN, and b^ = b, for k = 1,...,K, we define
L*(z,T)
where x° is given by (3.1).
=
L(q(T,x°),T)
From proposition (4.4) and the dominance relation (3.6)
it follows that
(4.46)
bz + L*(z,T)
< g(z,7T),
for all zeZ.
-30-
Thus, define the lower boundary function
£(z,T)
(4.47)
For a given T =
bz
is convex in z,
(x.^
as
bz + L*(z,T)
=
,t
£
)
we show now that g^(z,T) is convex in z.
it suffices to prove that L*{z,T) is convex in z.
us first notice that L*(z,T) is a non-increasing function in z.
follows since x^
increases s.
= /
=
x^(z) is non-decreasing in
^i+1
z
Lemma:
Proof
This
q(T)dT also increases or stays the same, which means
z
increases.
L*(z,T) is convex in z.
Let z, and z^ be given and z = oz, +
:
Let
Thus as z
by (3.1).
that the constraints of problem (PI) are relaxed as
4.7.1
As
Let x°(Zj^) be given by (3.1), ^ =
1
(1
-
o.)!^
(0
£
and let x = ax°(z^) +
,2
£
a
(1
-
1
a)x°(z2).
Define A as
A = Min Z
(4.48)
Z
subject to
^a^'^aa
Zw.
<_
.
s
^^•j - ^j
>0
w..
where
s^
^_J
q(-r'
,x°(z^)) dr'
corresponding to x°(z.) and where
(4.49)
ll.
=aZs.^
=
where ^
= total
aZx°
+
£ = 1,2,
,
s^-
= asi
(1
_
(z^) +
regular time (fixed)
(1
-
We have
a)s2.
a)Zs.2
(1
=
+
are the timeslot allocations
a)Zx°(z2) +
-
Zp.
.
"^
Since ^x^(z^)
=
z^^,
il
=
1,2,
-Sl-
it follows that
(4.50)
Is.
= z + ^
i
Now we note that the following "transportation dominance property"
namely that for given T, and given total overtime
holds:
z
+ f = Zs., L*(z,T)
<
L(q(T,x),T) for all xeX for which
such that
z
Zx.
^
=
The
z.
"^
k
i
intuitive interpretation of this property, given (4.45) is that for
total
z
+ f = Zs
timeslots.
.
,
a
this total should be allocated to the earliest feasible
The allocation s? corresponding to x?(z) does just that.
This
property is analogous to the dominance relation for overtime vectors in
3.1
and follows directly from the fact that a..
£
a.
.-,
.
for
i
=
lemma
;,..., v-1
and all j.
Given this property and (4.50) it follows that
L*(z,T)
(4.51)
<
A
By the convexity property of linear programs
A < aL*(zj,T) +
(4.52)
(1
-
which with (4.51) yields the assertion.
we
have finally that
a)L*(z2,T)
Q.E.D.
Min{cx:Ax < b}. The property referred to asserts that f
In the case at hand the b
See Dantzig [3], p. 2 75.
vector of interest is the vector of timeslot allocations, s^ , 1 £ i £ v
Let f(b)
is convex in b.
=
-32-
4.8
Lower Bounding Nodes in the Detailed Tree
Up to now, the bounding procedure has been presented as a method to
calculate bounds on nodes at the first level in the tree (i.e. nodes
corresponding to different z levels).
be used to bound nodes in the detailed tree.
particular value of
a
z
show now how the method can
We will
These nodes correspond to
and to a given set N, of jobs already scheduled.
The set of not yet scheduled jobs is represented by Np and obviously
N = N^UN2.
In
fact.
(4.53)
g(z,TT)
=
bz +
Z
jeN
= bz
+
E
(p.T. + h.C.)
•J
-^
J
J
(p.T. + h.C.) +
Z
(p.T. + h.C.)
and
^(z,T) = bz + y(z,tt|N^) + L*(z,T,N2)
(4.54)
where g^(z,T) = lower bound on total cost function; Y(2.'n'lNi)
cost of the jobs which have already been scheduled
L(z,T,N2)
=
=
Z
=
actual
(p.T. + h.C.)»
lower bounding cost of scheduling all
jobs of Np after jobs of
N,
have been scheduled.
So, the problem of concern
here is to calculate lower bound L(z,T,Np).on the actual cost y(z,it|N2) =
I
4.8.1
(p.T. +
h.C).
Direct Transportation Method
We can calculate L(z,T,N2) ^^ using the method presented in section
(4.2) after deleting capacity and timeslots already used by jobs in N,
33-
The node actually under consideration corresponds to a partial
schedule of jobs out of
level
N-,
and has been derived from a node on the first
The transportation problem
corresponding to the given z level.
solved at the first level node has the following structure:
(p*)
I
Mill
mn
I
si
S2
-34-
The relationship between the capacity supplies si
in
in
(P**) and s.
(P*) is the following one:
s'.
=
s'
.
£
s'
.
for
s.
= s.
i
for
for
=
1,2,. ..,1-1
i
=
=
i
where
is the first timeslot for which
I
I
I+l
,.
.
.
,v
It follows also that
V
V
Es'.+
i=l
t.=
Z
jeN^
^
^
Is.
i=l
^
Applying proposition (4.4) to problem (P**) yields
on the scheduling costs for N^ = {k,k+l
and s'. simply
all
jobs in
N,
,.
.
.
,n}.
a
lower bound
The relationship of
s^.
excludes any schedule for which any job in Np starts before
have been completed.
Following this method,
a
trans-
portation problem has to be solved at each node of the tree or at some
strategically selected nodes.
The dimension of the transportation problem
decreases when moving downwards in the tree.
4.8.2
Srinivasan's Operator Method
This method allows us to calculate the optimal solution of
a
problem of type (P**) when the optimal solution of (P*) is known, without
resolving explicitly
(P*)
(see
D7]
and p8]).
35-
4.8.3
The Use of Dual
Prices
When solving problem (P*), we obtain a set of dual variables
u.*(i = l,2,...,v) and Vj*(j = l,2,...,n) such that
V
(4.55)
||w.t||
is the optimal
n
Zs.u.* +
^a. .w.^ =
3=y^ ^^
i=l
where
V
n
E
i=r
^
Z
j=l
t-v.*
^
^
transportation solution.
It is clear that u.* and v.* are dual-feasible in
(P*), i.e.
u.* and v.* satisfy the dual constraints of (P*) represented by
(4.56)
u^.
+v. £a..
forii =l,...,v
=
(j
It is
clear also that
a
l,2,...,n
set of variables u.* and v.* which satisfy
(4.56) will automatically satisfy
(4.57)
Ui+Vj<a.j
for ji
=
I,...,v
U
=
k,...,n
But (4.57) represents the feasible region of the dual problem corresponding
to (P**).
So, the vectors u^.* and v.* are dual-feasible in
(P**).
But
for any pair of feasible dual vectors u. and v. and for any feasible
primal solution |w. -H of (P**) we know that
(4.58)
V
Es.'u. +
i=f
^
V
n
I
j=k
t.v. <
J
J
~
i
Z
=
n
I
Z a..w..
j=k ^^ ^J
Equation (4.58) is a well-known result from duality theory in linear
programming (see [8], page 228).
So when introducing u^* and v.* in
-36-
(4.58) we obtain
V
(4.59)
i
V
n
I t.v.* <
u.* +
^ si
=I ^
J
j=k
^
-^
n
l a. .w. .**
Z
i
=
^^
j=k ^J
I
where w. .** is the optimal solution to (P**)
Following arguments analogous to the proof of proposition (4.4) it
is
readily shown that the right hand side of (4.59) is
dual
Thus, again from (4.59), we obtain the desired
have been scheduled).
N,
lower bound on
cost of scheduling jobs belonging to N^ (after all jobs out
the actual
of
a
pricing lower bound for this cost to be:
V
L*(z.T,N5)
(4.60)
n
Es.'u.*+
=
"^
i
=
I
^
^
S
j=k
t.v.*
^
J
Branching and Selection Considerations
4.8.4
This article proposes an algorithm of the branch-and-bound type.
The bounding procedures have been discussed above.
The branching and
selection procedure we propose are very similar to those used by Shwimer
in [15].
A particular node in the tree corresponds to a particular
overtime level
a
and
I in the tree,
level
to N,
z
).
a
(«-
partial
-
1)
schedule of jobs out of N^N.
At a given
jobs have been scheduled (and thus, belong
Let Np contain n^ = n +
1
-I elements at this point.
From such
node we may creat n^ new nodes by branching on each element of set ^2-
The n„ new nodes represent partial
in the first
on level
(Ji
"schedulable" position.
After bounding n^ new nodes created
+ 1) we have to choose one particular node out of this set
to be explored further.
bound.
schedules with one more job scheduled
We propose to choose the node with minimal lower
-37-
5.
An Algorithm and an Example
As a first-cut at using the above results, a branch and bound
algorithm was formulated and programmed.
for the case r. = 0, jeN, and
b.
=
b
The algorithm was developed
for all k, so that all dominance
relations and convexity arguments derived above would hold.
structure is that given in Figure
above.
5
The tree
The structure of the
algorithm is essentially as follows.
For a prespecified T Fibonnacci search is performed on the convex
lower bounding curve cl(z,T) to obtain z* such that
£(z*,T)
(5.1)
=Min
{a(z,T): z^.^ < z < z^^^}
A non-preemptive schedule is then constructed (following (2.1)) by
sequencing in order of completion times of any preemptive schedule
corresponding to the time slot/job allocations in the optimal transportation tableau at z*.
This solution is the current best and gives an
upper bound on the optimal solution.
The current z* level
is explored via the detailed algorithm
described below and the current best solution is changed as appropriate.
Thereafter all other undominated
z
levels (i.e. z such that c[(z,T) <
current best) are explored via detailed search until no undominated
levels remain.
z
The algorithm terminates at this point.
The detailed algorithm for a given z proceeds by first calculating
the optimal
transportation tableau if npt yet available.
The bounding
strategy used was the dual pricing scheme of 4.8.3 with branching to
the node with the minimum lower bound as described in 4.8.4.
The example below
A more detailed description is given in [^]illustrates the various steps in applying the algorithm.
38-
An example is now given to illustrate certain characteristics of the
solution and the above algorithm.
Example
:
Consider the following data.
=
10,
K = 10, H = 96, b = 25.
1.
n
2.
Time periods
123456789
^k
10
39-
4.
Job data
job
*j
j
1
2
3
4
5
6
7
8
9
10
-40-
Detailed scheduling costs
Zfp.T. + h.F.) = 2221
=
J
j
Overtime costs
=
J
J
J
bz =25 x 13
325
=
Total cost
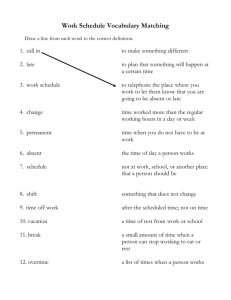
Figure
2545
illustrates several steps in the solution procedure.
6
lower curve shown, £(z,T'), was used to find the initial level z*
detailed search.
The
12 for
=
After this initial level was found the partition T" was
The transportation tableau at optimum corresponding to £(12,T")
used.
indicated the following preemptive schedule of job/time slot allocations.
Job
2
No,
t
i
4 3
4
4
f
t
Time
Tt-
I
T
1
I
1
1
t
I
f
25
30
S
'^4
Job
9
No.
Time 33
l—L—l
35
1
I_l
Job
7
No.
_I
Time 65
L
I
1
J
\
9
i_
L_L
#1^
70
10
t
1
10
10
-I
80
75
7
L_J
t
t
85
^9
good non-preemptive schedule
(tt.
<>i
t
m
=
_l
t
I
L
65
yy,^A'y,<^A
90"
96
10
The slashed areas above indicate idle time.
a
I
V5
H
From the above schedule
2-1-4-3-5-6-8-7-9-10) was obtained by
sequencing in order of completion times for the transportation tableau
preemptive schedule shown above.
This yielded the upper bound g(12,TT.)
= 2580,
-41
An
adjacent pairwise interchanges in
yielding an improved solution
=
-n^
were then evaluated
2-1-3-4-5-6-8-7-9-10 with g(12,Trg)
Detailed search of the overtime level
2566.
tt.
=
z
12 revealed that
=
was
ttp,
b
optimal
for this level.
Overtime levels less than
eliminated.
z
=
12 were then explored and quickly
The first solution generated for
z
13 was
=
=
tt.
2-1-3-4-5-6-8-9-7-10 which yielded the improved cost
g(13,TTj,)
Detailed search yielded further improvement
=
This solution also dominated all other
z
g(13,iTp,)
=
2546 with
2562.
ttj,
= -n^.
levels greater than 13 and is
therefore optimal
Note that in this example the lower bounding curve £(z,T') and
£(z,T") achieve their minima at the same point.
Note also the solution
(12, TT.) constructed from the transportation tableau
(after
7
seconds) proved
to be very close to optimum.
The computation time (32 sec.) was subdivided as follows:
-
compute ^(z.T')
-
compute 2.(z.T"):
-
detailed search of all
-
other operations:
:
1
second
27 seconds
1
z
levels:
3
seconds
second
The computation of £(z,T") requires about 85 percent of the
total time.
As indicated in 4.5.4 the computational
on the time partitioning:
a
efficiency depends
finer time division gives stronger bounds, but
requires to solve transportation problems of higher dimensions.
We were
able to cut down the computation time to 16 seconds (instead of 32) by replacing
-42-
T" by T'"
and
a
(t'"
= 0,
t'.'^
=
x'."
+ 2).
More complete computational results
discussion of refinements of the above algorithm are given in [6
],
u
-43-
(2,n)
S^'
1
1
tSi>Z
1
V
y^lSZt
250O
--
2M79
'*i'wr6
ztj6g
^<a(z,T")
-ri'tfeH
2v?9
I
I
ZH-00
^iS9
^35
t^oo
2.
^f^7
C:?,r';
.-
1-
_,
9
Figure 6.
10
n
12
13
14
15
16
Illustrating the Algorithm for Sample Problem
.44-
Concluding Remarks
This paper has formulated the one machine job shop scheduling
problem with variable capacity.
A bounding structure has been proposed
which appears to provide considerable insight into the structure of the
optimal solution as well as bounding its cost.
Among the issues which appear fruitful for future research, the following
seem particularly important.
1.
Extension of the bounding scheme to more complex aggregate
costs and constraints.
In
principle, this is straightforward.
If the
cost and constraint structure of the problem were linear, for example,
a
lower bounding problem is formulated with the given aggregate costs and
constraints plus the transportation formulation for the detailed level.
The optimal solution to this lower bounding (linear programming) problem
would then be used as a starting point for local search just as the
minimum of £(z,T), and
in the algorithm above.
a
corresponding non-preemptive schedule, were used
This procedure would very likely lead to an
excellent solution, though bounding of all capacity plans would no doubt
be prohibitively expensive in this more general
environment where
a
single dimension representation of overtime (total overtime) is no longer
possible.
2.
include:
Extensions and refinements of the algorithm. Cases of interest
(a)
non-simultaneous job arrivals; (b) inclusion of Shwimer's
theorem A (generalized) in the detailed search algorithm; (c) inclusion
of the slope bounding relations introduced in 4.6.3
(d) more complex
-45-
aggregate models as discussed above; and (e) general pruning and testing
of the algorithm.
3.
Evaluation of alternative heuristics likely to be imple-
mentable in more realistic environments.
(a) methods for
determining
a
Heuristics of concern are:
good capacity plan; (b) dispatching
heuristics; and (c) coordination schemes for iteratively determining
a
combined capacity and scheduling plan.
The central issue here is
to provide normative insight into the resolution of the aggregate-detailed
cost trade-off problem.
The extent to which one might be able to extrap-
olate such one machine results to more general environments is, of course,,
a
moot question requiring more complete tests by empirical and simulation
studies.
4.
Finally, it would be interesting to explore the possibility
of extending the transportation bounding scheme to several machines
operating in series or in parallel.
-46-
Appendix
Proposition (P4)
F
Let r. = 0,
:
j
=
I
l,...,n.
for any given capacity plan.
Proof:
Suppose we know the optimal schedule S with respect to
that this schedule is not the SPT schedule.
S
Then the SPT rule minimizes
is
and suppose
F
By (PI) and (P2) we may assume
non-preemptive without inserted idle time.
My(T)
S
S'
there are adjacent jobs
Then:
Interchanging
k,Jl
such that
k<il
and a gives completion times C/
k
(k
precedes £) and
and C'
for jobs
t.
k
and
E
C.
>
in a new schedule called S', and
C^
<_
C'
K
+ C;
therefore
Ji
f'
t^^^
<
t|^
and y{i) is non-decreasing;
^i-
^k
Thus
C^ because
<
^
C.
F.
K
+ Co.
But C. = C. -Vj
?^
k,il.
Then
Z CI
<
jeN
jeN J
Continuing with pairwise interchanges one may thus
)t
J
J
reduce S to the SPT sequence without increasing F.
'^
and
t^^.
-47-
BIBLIOGRAPHY
Production-Inventory Systems:
Buffa, E. S. and Taubert, W. H.
Planning and Control
Richard D. Irwin, Inc. , 1972.
.
Conway, R. W., W. L. Maxwell and L. W. Miller, Theory of Scheduling ,
Addison Wesley (Reading, Mass., 1967).
Dantzig, G. B., Linear Programming and Extensions
University Press, 1966.
,
Princeton
Elmaghraby, S. E., "The One Machine Sequencing Problem with Delay
Costs," Journal of Industrial Engineering , Vol. XIX, No. 2 (February
1968), pp. 105-108.
Emmons, H. , "One-Machine Sequencing to Minimize Certain Functions
of Job Tardiness," Operations Research , Vol. 17, No. 4 (July- August
1969), pp. 701-715.
Gelders, L. and P. R. Kleindorfer, "Coordinating Aggregate and
II - Computation
Detailed Scheduling in the One-Machine Job Shop:
and Structure," unpublished working paper, Sloan School of
Management, MIT, May 1972.
Green, R. S., "Heuristic Coupling of Aggregate and Detail Models
in Factory Scheduling," unpublished Ph.D. thesis, Sloan School
of Management, MIT (February 1971).
Hadley, G., Linear Programming
,
Addison-Wesley, 1963.
Held, M. and R. M. Karp, "A Dynamic Programming Approach to Sequencing
Problems, " Journal of the Society for Industrial and Applied
Mathematics , Vol. 10, No. 1 (March 1962), pp. 196-210.
Jones, C. H., "Parametric Production Planning," Management Science
Vol. 13, No. 11 (July 1967), pp. 843-866.
,
McNaughton, R.
"Scheduling with Deadlines and Loss Functions,"
Management Science Vol. 6, No. 1 (September 1959), pp. 1-12.
,
,
Newson, E.P., "Lot Size Scheduling to Finite Capacity," unpublished
Ph.D. thesis, Sloan School of Management, MIT (August 1971).
Schild, A. and I. J. Fredman, "On Scheduling Tasks with Associated
Linear Loss Function," Management Science , Vol. 7, No. 3 (April
1961), pp. 280-285.
-48-
^."Scheduling Tasks with Deadlines and
Non-Linear Loss Functions," Management Science , Vol. 9, No. 1
(September 1962), pp. 73-81.
[14]
____^
[15]
Shwimer, J., "On the'N-job, One-Machine, Sequence-Independent^
Problem with Tardiness Penalties: A Branch and Bound Approach,
Management Science . Vol. 18, No. 6 (February 1972), pp. B301-B313.
[16]
"Interaction between Aggregate and Detailed Scheduling
thesis, Sloan School of Management,
MIT (June 1972).
,
in a Job Shop," unpublished Ph.D.
[17]
SrinivasBn, V., "An Operator Theory of Parametric Programming for the
Transportation Problem (I)," Management Science Report #236, GSIA
(Carnegie-Mellon University, March 1971).
[18]
"An Operator Theory of Parametric Programming for the
Transportation Problem (II)," Management Science Report #242, GSIA
(Carnegie-Mellon University, April 1971).
[19]
___^
[20]
Taubert, W. H., "A Computer Search Solution of the Aggregate
Scheduling Problem," Management Science , Vol. 14, No. 6 (February
1968), pp. B343-B359.
,
"A Hybrid Algorithm for the One-Machine Sequencing
,
Problem to Minimize Total Tardiness," Management Science Report
#225, GSIA (Carnegie-Mellon University, November, 1970).
It.
'-^h^