Redesign of a Human Powered Battery Charger for Use...
advertisement

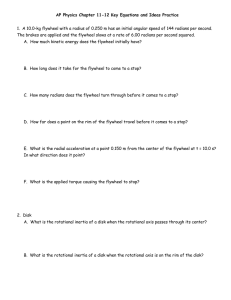
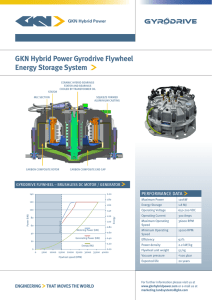
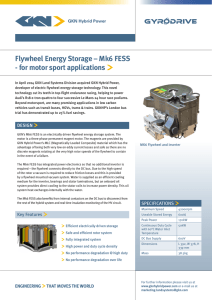
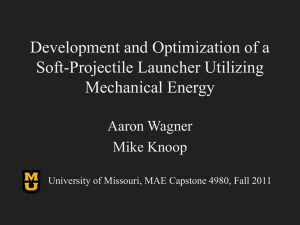
Redesign of a Human Powered Battery Charger for Use in Mali by Lisa Chandler SUBMITTED TO THE DEPARTMENT OF MECHANICAL ENGINEERING IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF BACHELOR OF SCIENCE IN MECHANICAL ENGINEERING AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY MAY2005 FJbe So51 ©(2005 Lisa Chandler. All rights reserved -MASSACHUSt S INS i 1 CUE OF TECHNOLOGY The author hereby grants MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. -JUN 0 8 2005 LIBRARIES // Signature of Author: S-Departmentof Mechanical Engineering May6,2005 _ ) Certified by: k~9 't w Wallace 0David David Wallace ThesisSuervisor Accepted by: ARCHIVES Ernest G. Cravalho Professor of Mechanical Engineering Chairman, Undergraduate Thesis Committee 1 l Redesign of a Human Powered Battery Charger for Use in Mali by Lisa Chandler Submitted to the Department of Mechanical Engineering on May 6, 2005 in Partial Fulfillment of the Requirements for the Degree of Bachelor of Science in Mechanical Engineering ABSTRACT The design for a human powered battery charger was analyzed and a redesign was proposed. The original product was designed in the MIT ME course 2.009 to power a LED projector that will be used to teach literacy classes in Mali. The goals of the new design are to decrease the cost and usability of the alpha prototype, producing a minimum of 60W that is required to provide a 10:1 use to charge ratio for the 6W projector. The alpha prototype utilizes a modified rowing motion to move a device produces power through a constant force spring, a small motor. A voltage regulator safely charges the battery using the voltage output of the motor. The rowing motion requires a number of moving parts and expensive components and although the complex motion combines the power available from the leg and arm muscles, the movement is not simple to understand or particularly comfortable to use. A model was created to test a proposed redesign that simplifies the product in several areas. The new design will use the arm muscles only to provide the necessary power and will avoid costs by making the charger a stationary product. The model is made of a recoil spring and pulley mechanism mounted to a freewheel, which turns a shaft and flywheel. The shaft would then be connected to a motor to charge the battery in a similar manner to that of the alpha prototype. The experiments performed and calculations on the model provided information that suggests that a flywheel based design does provide sufficient power for a 60W output. Further research will be needed to accurately ascertain the cost of a product and whether it can be manufactured for under $50. Preliminary analysis suggests that it is possible to meet both the cost and power requirements of the product. Thesis Supervisor: David Wallace Title: Associate Professor, Dept. of Mechanical Engineering 2 Table of Contents 1. Introduction ........................................................................ 4 2. 2.009 Alpha Prototype Analysis................................................. 7 3. Product Comparison............................................................... 9 4. New Design Concept............................................................. 11 5. Theoretical Analysis.............................................................. 13 6. Apparatus ......................................................................... 18 7. Procedure ......................................................................... 21 8. Results.............................................................................. 22 9. Discussion ........................................................................ 26 10. Conclusion and Recommendations ........................................... 27 11. Appendices....................................................................... 28 3 1. Introduction The Kinkajuice human powered generator was designed for a product design class in the fall of 2004 (http://web.mit.edu/2.009/www/gallery/index.html). The goal behind the Kinkajuice design was to power a 6W projector using alternative energy sources. The Kinkajou projector, designed in 2002 for the same product design class, utilizes an LED to provide a projector with low power consumption (http://www.designthatmatters.org/k2 and http://web.mit.edu/2.009/www/gallery/index.html). A non-profit organization called Design that Matters (http://www.designthatmatters.org), was the motivating force behind the design of the projector and subsequent need for a power source for the projector. There are over 14 million people in Mali, over 30% of which are illiterate. In some of the rural regions of West Africa including Mali, up to 75% of people cannot read. Currently, there are over 200 million adult Africans who are learning to read (http://www.designthatmatters.org/k2/). These high figures bring about the motivation to teach literacy classes to those in need. Due to the fact that almost all women work during the day (cleaning, cooking, and other chores, in addition to any possible job), literacy classes are held at night. Unfortunately electricity and other forms of power are very limited and costly, so women in classes have been forced to read by the light of small lanterns. There is a large need for teaching materials that can be used during the evening with little energy consumption. Design that Matters took on this cause and decided to design a product that would enable classes to be taught more easily at night. The Design that Matters team, along with other participating organizations, decided to use Mali as their initial market. Their goal is to send a group of teachers to travel in Mali and teach literacy classes to the illiterate populations primarily in rural villages with limited access to electricity and other forms of power. In order to solve the problem of limited lighting and power, the Kinkajou projector was designed by a team of students in 2002. The Kinkajou, pictured in Figure 1, uses a 6W LED and allows teaching materials to be projected on the wall for all the students to see. The projector uses little power, but still requires a power source as electricity is lacking. Typical classes last between one and half and three hours in the evening which creates the need for batteries that will provide 6W for the entire class period before being recharged. A battery charger of one form or another is needed to allow for multiple uses. In the fall of 2004, a new group of students in the product design class decided to take on the task of designing a battery charger using an alternative power source. The Kinkajuice: human battery charger was the result of the team effort. The Kinkajuice was utilizes human power, which is one of the energy forms that is very abundant and cheap in Africa. The alpha prototype for the Kinkajuice is pictured in Figure 1. 4 Figure 1: On the right, the Kinkajou projector is pictured. The Kinkajou uses a 6W LED and can be used to teach literacy classes during the evening and night. The Kinakjuice human powered generator is pictured on the left and is attached to the kinkajou projector that is powers. One of the main goals of the Kinkajuice is to easily allow the projector to be charged before use. In order to minimize the added workload, the Kinkajuice was designed to provide 60W of power ensuring a 10:1 use to charge ratio for the Kinkajou projector. In order to achieve efficient charging, the Kinkajuice was designed to take advantage of the work output available in human arm and leg muscles. The Kinkajuice utilizes a rowing motion modified from traditional rowing machines so that the user remains in a stationary location, while moving the Kinkajuice charger to create the necessary power output. The modified rowing motion is begun in a crouched and bent position as seen in Figure 1. The motion is executed by extending the legs pushing the device forward, then leaning backwards while straightening the arms. The arms are then pulled to the chest and the movement is completed by bending forward, bending the legs and returning to the initial position to begin again. 5 . -I. . ~I~~~~~~~~ . /- -, -.I- . .... . ... - "II p .............. Figure 2: Diagram of the rowing motion used to power the Kinkajuice human powered generator. 6 2. 2.009 Alpha Prototype Analysis The alpha prototype was designed to fulfill three major requirements. The cost of manufacturing or parts should not exceed $50, the product should produce a minimum of 60W of power to run the kinkajou projector, and the product should be easily portable so that it could be moved from classroom to classroom as needed. In addition several other issues were considered including expected life cycle of the product and its parts, ease of repair and materials used. The last two conditions were important so that local craftsmen and workers would be capable of repairing and caring for the product easily. In order to best meet these requirements, a device that utilizes a modified rowing motion was chosen for its small size and efficiency. Research showed that the most efficient transfer of human power is recovered from cycling, recombinant cycling and rowing. A modified rowing machine was chosen in order to minimize the cost and size of the product. Of the products already in existence that use human power to charge batteries or act as a generator, many of them utilize a bicycle or simplified pedaling action. The cost of these cycling products is much greater than $50. The high cost seems to be due to the necessity for accurate and smooth motion and gearing as well as the size of machinery needed to provide sufficient energy. A traditional rowing machine is also costly and large in size, but the Kinkajuice design team devised a modified concept that did not require the complex rail section for seat movement. Using a traditional rowing machine, the rower sits on a seat that is attached to a straight rail. The user's feet are strapped in place and allow for the rower to push his/her body and the seat back along the rail all the while holding onto a handle bar that is connected to a chain that pulls a flywheel. This rowing motion is very efficient because it uses both the leg and arm muscles as well as allows the user to pull his or her weight against the chain when leaning back before completing the arm movement. In order to avoid the added cost and size of a traditional rowing machine, the design team decided to modify the rowing motion so that the seat is stationary and the legs and feet move instead. This change negates the need for a seat rail mechanism and the added cost and complexity associated with the mechanism/movement. By making the seat stationary, the main device must be motile and move with the leg extension and retraction of the user. The new motion created relies on similar principals as a rowing machine, but changes what parts of the body produce the movement and forces. In order to still use both the leg and arm muscles, the user begins the cycling movement in a bent over crouched position with legs bent and arms stretched out to hold the handle and chain. The force on the chain is produced first by the extension of legs as the user pushes the device forward. The user then leans slightly backwards pulling the chain farther still finally bending the arms and pulling the handle towards the body where the chain reaches maximum extension. The user then reverses the movements and returns to the initial position ready to start the cycle again. Maintaining a motion that utilizes the arm and legs provides a larger possible power output and the rowing motion allows for a higher efficiency. Unfortunately, compared to the theory behind the design prototype, the results of the device were not as promising as hoped. Although the prototype did meet the minimum of 60 Watts of power output, the use of the prototype was still somewhat awkward and the cost of parts was not 7 as low as expected. These problems suggested that a redesign would be necessary to best meet the requirements of the project. In order to address the issues that arose with the alpha prototype, the initial design was re-analyzed looking for possible flaws and reasons behind the problems with cost and ease of use. Alternative ideas and suggestions were discussed in order to improve the design. Simplifying the design to lower complexity and the number of parts and materials would address the issue of cost. A less complex motion focusing on only one major muscle group could possibly solve the comfort and ease of use problems. These simplifications could easily solve the initial issues, but it is still important that the new design meet the necessary power requirements. Therefore, more research was done into human power output and the necessary efficiency that might be required by relying on only one muscle group. The rowing motion was initially chosen due to the high efficiency and long term power output, but the product requirements don't need a huge amount of power, nor do they need a high efficiency. Research has shown that sustainable power from cycling and fiorrowing are around 200 and 400W respectively (Bicycling Science, 1982). Additionally, for athletes, the measured power output produced using both the arm and leg muscles reaches an approximately constant 0.66 HP (490W) after 5 minutes. The leg muscles alone produce around half a HP or 373W, while arms alone can produce up to a steady 150W after 5 minutes of work (University of Kyoto, Man as a Locamotive Engine http://web.kyoto-inet.orjp/people/kazuho/manasle/manasle.htm and Human Power Output http://www.lorne.plus.com/college/david/POWEROUT.HTM). These numbers are for trained athletes so the corresponding value for a typical individual would be slightly lower. There is also a slight decrease in power over time due to fatigue. Therefore a simple motion that utilizes only one muscle group, wither arms or legs, should be sufficient to provide the necessary 60W even after inefficiencies are considered. Even though the minimum power output was reached in the initial design, the output was much lower then expected considering the theoretical efficiency of rowing and typical values of cycling and rowing. Based on the max potential power output from the arm and leg muscle groups of 490W over sustained time periods, elite rowers are capable of producing around 400W, which corresponds to 80% efficiency (this is based on the 1992 UJSmen's heavyweight rowing team (Seiler, 1996). 8 3. Product Comparison In order to meet the specified needs of the kinkajou projector, research was done on products currently out on the market that might meet the requirements outlined by the Design that Matters Team. Focusing on human powered generators due to their reusability, sustainability and the abundance of human power, several products were found. A variety of bicycle generators were found with variable costs and power outputs. In addition hand cranks were a popular charging method for small devices. The bicycle generators typically produced sufficient power, a minimum of 60W, to achieve the necessary 10:1 use to charge ratio. The MkIII Human Powered Generator produces a "typical average continuous power" of about 125W, but the cost of this product is around $500 (http://www.windstreampower.com/humanpower/hpgmk3.html). Another product made by the some company is a bike generator module that attaches to a standard bicycle and allows a cyclist or other user to produce power out of their own bicycle (http://www.windstreampower.com/humanpower/ppg.html). This power output available from this product ranges from around 100-300W and the cost of the module is $450. 100-150W is a better estimate for a typical person whereas it would take a top athlete to produce 300W doing almost any sort of workout, except for short burst power. A product called "Pedal-a-Watt" can be bought for around $150 plus the cost of the bicycle and battery (http://www.econvergence.net/electro.htm). Hand cranks are a very common charging method for small devices including flashlights, radios and cell phones. FreePlay, a company that produces many human powered products, utilizes the hand crank in most of their applications (http://www.freeplayenergy.com/). A radio only consumes about 5W and portable stereos around 10-30W. These small power consumption devices can be charged and run firomhand cranking. The Kinkajou projector consumes 6W and in theory could be charged in a similar method to these other small devices. The problem with hand cranks is that they tend to have a low use to charge ratio, and the goal of the kinkajuice charger is to provide at least a 10:1 ratio. The faster the user turns a hand crank the more power is achieved and therefore a higher use: charge ratio is created. The small size of the hand crank, while convenient and portable reduces the ease of charging and the power output. The price of hand crank chargers ranges from around $25-50, but the use to charge ratio is around 6:1. The products available on the market as well as the Kinkajuice generator are compared in Table 1. 9 Table 1: Shows the related cost, power output and use o charge ratio of the human powered generators currently available as well as the solar panel system currently used to charge the Kinkajou. Use:Charge Approx.Cost 12 10 to 1 $45 +-10 10 72 1.7 to 1 $130 Freeplay hand crank 25 29 4 to 1 $50 +batt Pedal-a-Watt 125 6 20 to 1 $150+bike+batt Rated Output Charge time for 2 [W] hour class [min] Kinkajuice 60 Unisolar Product US-11 panel 10 4. New Design Concept In order to meet the product requirements a simplified design that utilizes power primarily from the arm muscles was chosen. Although the arms alone are weaker than the leg muscles and a combination of leg and arm muscles, the movements and motions associated with the arm muscles are very simple and can easily be converted into power. Several arm cycles were considered including a curling motion, a pushing/pumping movement and well as a simple pulling motion. A design focusing on a simple pulling movement was decided on based upon the ease of completing the motion as well as the extended range a pulling motion allows compared to a curling or bending of the arms. The pulling motion can easily be completed from a variety of positions including standing upright or sitting on the floor or in a chair. The pulling motion also allows for the bending of the back to add additional extension or time to the cycle. Based on the research and tests completed for the original design a resistance/recoil mechanism is necessary to produce sufficient power as well as to provide a comfortable feel to the motion. The alpha prototype used a constant force spring to create a resistance for the user and to store energy. Pulling on the handle to extend the spring, the generator shaft is rotated and a DeWalt 18V cordless drill motor is used to change the kinetic energy into electric energy to be stored in a battery. In the new model, a recoil spring will be used to provide resistance for the user. In order to provide sufficient rotational speed for the generator, a flywheel will be used to maintain rotational velocity and store energy for transfer to the battery. As the handle is pulled, the shaft connecting the recoil spring and flywheel should spin rotating the flywheel and increasing the rotational velocity. On the backwards motion of the cycle, when the handle and cord are rewound upon the spooling mechanism, it is important that the flywheel does not reverse directions and decrease the rotational velocity. In order to maintain the forward motion of the flywheel without the reversing of directions., a mechanism that only allows the shaft to turn in one direction will be implemented. A clutch bearing or a freewheel both provide the one way direction turning such that the shaft will rotate in one direction and will spin freely about the other components in the reverse direction. To generate the power required to charge a battery, the output shaft will be coupled with a generator or motor run in reverse. The shaft that spins with the flywheel in the forward direction only will be coupled with a generator shaft one end. The generator can be attached to a voltage regulator which will allow the batteries to be charged without overloading. 11 K ) Figure 3: Schematic for the alpha prototype for the kinkajuice generator. The input force is applied to the spool, which pulls the negator motor, spinning the shaft and taveling to the motor. Motor Figure 4: Schematic of new design. Input force is applied to the recoil pulley, which rotates the freewheel and shaft spinning the flywheel. The rotational velocity from the flywheel will be then given as an input for the motor. 12 5. Theoretical Analysis During the initial round of design brainstorming and research, several methods of achieving the necessary power were considered. These designs generated the required power using a constant force spring, a bicycle pedal and gears, a pedal and flywheel, a torsion spring and several other variations. A constant force spring and generator setup was chosen for the alpha prototype. The redesign proposes to use a retractable handle bar and flywheel. Below, a quick comparison of how the two methods work and the formulas governing power generation is presented In the alpha prototype, a constant force spring is used in the form of a negator motor to transfer energy from the user to the generator where the voltage produced is used to charge a battery. When the handle is pulled, the spring in the negator motor is unwound from the spool due to the applied force where it is then rewound onto another spool. The winding occurs as the shaft spins due to the force applied on the handle which is connected with the second shaft, thereby uncoiling the CF spring from the storage spool and winding it onto the working spool. A constant force spring produces a constant force per distance extended due to the fact that it is coiled and the radius of curvature is nearly constant. The energy is stored in the spring as the spring is rewound on the working spool and is bent in the direction against its natural curvature. This unique property means that the same force is needed to move the spring any distance, instead of the force required increasing as the distance moved increases. As the spring uncoils back following its natural curvature, rotational energy and momentum are imparted on the shaft. The shaft is coupled with a motor run backwards to act as a small generator and charging the battery. Depending on the number of pulls and the force the user inputs, the generator can provides a specific power. The new model implements a flywheel to store and transfer energy to the generator in order to charge a battery. It is important to understand how a flywheel can store this energy as well as what variables influence power output. It is necessary to model the proposed design so calculations regarding power output can be calculated to determine the parameters necessary to meet the 60W power requirement. The primary apparatus consists of a handle bar attached to a recoil mechanism mounted on a bicycle freewheel which is coupled with a rotating shaft and flywheel. Energy imparted by the user is transferred to the flywheel as the freewheel spins the shaft. The kinetic energy stored in a flywheel is determined by the rotational velocity and moment of inertia according to Equation 1. KE= V (1) Io)2 where I, is the moment of inertia and w, omega, is the rotational velocity. Rotational velocity is given in radians/sec and can be related to linear velocity by the following formula. o =V/R (2) 13 where r is the radius at which the velocity is measured. The moment of inertia depends on the mass of each particle in the body and how far from the axis it is located. Moment of Inertia is defined in the following formula. I=ZmiRi2 (3) In the given formula mi is the mass of a particle i and Ri is the radius at which particle I is located. For objects of uniform composition simplified formulas can be used to determine the moment of inertia. In this context we are concerned with a cylindrical flywheel rotated about the central axis. The moment of inertia for a cylinder of radius R is given by the following equation. I = ½/mR 2 (4) Inserting equation _, for a cylindrical flywheel into Equation 1 for the kinetic energy stored in a rotating object we obtain the following relationship. KE = ¼ mR2Wo2 (5) The mass depends on the density of the material and the volume. The volume is also a function of the radius, so either property can be used to determine the necessary material. Common materials for flywheels include steel, concrete and carbon fiber. Flywheels are very useful for energy storage systems, but their one major limitation is due to the high stresses caused by such high speed rotations. In order to maintain safe practices and prevent failure, these stresses require flywheels to be made of high strength materials. (http://www.upei.ca/-physics/p26 1/projects/flywheel 1/flywheel 1.htm) In the current model, rotational speed is imparted to the flywheel by pulling the recoil mechanism which in turn rotates the shaft and connected flywheel. A force is applied to the handle bar chain which is coiled around a pulley with a 4 /2 inch diameter. The pulling force produces a torque on the pulley and shaft that is equal to the force times the distance of the level arm on which is applied. The formula for torque is shown in the next equation T = Ff)*R (6) Where Fpis the force perpendicular to the lever arm which is the radius of the pulley R and tau, T, represents the torque produced. The torque is the angular equivalent of force and is an important component in the equation governing rotating bodies. For a rotating mass, the following equation determines the behavior of the body. S = Ia (7) Where alpha, a, is the angular acceleration of the rotating body. For bodies with constant angular acceleration, angular equivalent equations can be written for the linear equations relating acceleration, velocity and position. The average angular acceleration, Wavg, can be written two ways. 14 toavg (( + oo )/2 (8) t(oavg= 0/t (9) Where o is the current or final velocity and oo is the initial velocity and 0 is the position in number of rotations. For rotating bodies with constant angular acceleration, the following equations are also true. = o +t (10) Where coois the initial angular velocity and t is time. Equation 9 is important because after solving for the angular acceleration in Equation 7 it is possible to determine the rotational speed as a function of input torque and the moment of inertia of the flywheel. Substituting in Equation 6 for the torque, rotational velocity can be written as to = too+ (FpR/I)t ( 1) In order to calculate the output o of the flywheel after a torque is applied it is necessary to understand how a rotating mass behaves with no inputs. Just as linear motion conserves momentum, rotating bodies conserve angular momentum when no net torques act upon the object. Angular momentum, L, is defined the same as its linear counterpart where L = Io (12) Momentum is the product of inertia, I (linear mass equivalent) and rotational speed, o (linear velocity equivalent). This formula is useful because it states that a flywheel will maintain rotational speed if no net torque is acting on the body. This is because the flywheel does not change size or shape and therefore maintains the same moment of inertia. The only forces that are capable of producing a torque when the cord is not being pulled are gravity and friction. Gravity produces torques that act in opposite directions and cancel out because an ideal flywheel is symmetrical and the magnitude of the torques are equal. Friction is the only remaining factor that can contribute to slowing the flywheel. There is a small amount of friction between the shaft and the flywheel and this may produce some torque that reduces the angular velocity of a flywheel. This conservation of momentum and therefore angular velocity is what makes flywheels so important and useful. The ability to maintain rotational speed allows a flywheel to smooth out jerky inputs to create a steady output as well as to provide energy upon spinning down. A flywheel can store a high amount of kinetic energy by maintaining a high angular velocity. The motor converts the angular velocity of the output shaft into voltage to charge the battery. This process is completed as the motor is run backwards acting like a generator and converting kinetic energy into electrical energy. Power output of a motor depends on the motor characteristics as well as the input provided. Motor characteristics are generally described by the stall torque, Ts, and the no load speed ton.The stall torque is defined as the minimum torque required to stop the motor shaft from spinning, in other 15 words, cause the motor to stall. The no load speed is the rotational velocity of the motor shaft when no loads or forces are applied. Using these definitions, the equations below for torque and rotational speed can be written with respect to the correct motor characteristics. T = (13) - (/o/n)o (O = (s - )(on/'Ts) (14) These equations assume steady state application, while the motor is running and the acceleration is assumed to be negligible. The power output of a motor is given by Equation 15. P = To) (15) where power is a product of torque and rotationally velocity. Using equations above, power can be written as a function of either torque, or speed and the appropriate motor characteristics as shown in the next equations. P()) P(T) -(Ts/)n)(O 2 + TsDo (16) -(o)n/Ts) T2 + 'T O)n (17) where the no load speed and stall torque are known motor characteristics and the torque or rotational velocity is the input. Based on the model in this design, the rotational velocity is the easiest parameter to measure and will be used as the input to determine the power output of the motor. The flywheel in this model is used to maintain the angular velocity of the shaft in order to run a generator to produce the voltage to charge a battery. The variables in this model are the force applied by the user, the frequency of pulls, and the inertia of the flywheel. The motor characteristics also affect the final power output, but various motors can be found to maximize output based on the rotational velocity and torque output. The stroke rate is very important because the force applied and how often it is applied directly relates to the torque and rotational velocity of the shaft. The torque required to produce sufficient power can be divided into many strokes in order to reduce the force applied for each pull. The pulley is oriented such that the handle bar cord is released perpendicular to the radius. This geometry allows the entire force to produce a torque about the shaft. The force that is applied by the user is limited by the strength and endurance of human muscles. The muscles utilized in this model are primarily the arm muscles. Based on research and some simple experiments it is known that the arm muscles weaken dramatically over time but can produce forces around _ for sustained periods of time. These forces vary somewhat person to person and depend on gender, weight, and fitness. Choosing a motor that will optimize the power output based on the given inputs is important. For a linear torque to speed motor, the peak power output occurs at half the maximum rotational speed and half the maximum torque. At speeds and torques within a 16 small range of the maximum, the motor has a high efficiency. For the best design, it is important to operate the motor at the highest efficiency possible. In order to achieve the minimum power output of 60 Watts it is necessary to design a flywheel that will store sufficient energy. Based on Equation 1, the energy stored in the flywheel, and the restrictions on the forces attainable by human arm muscles, it is possible to determine the necessary size of the flywheel by finding the moment of inertia required. Depending on the location the force is applied, the resulting torque can be converted into a reasonable estimate for the rotational velocity. Given the force limitations of arm muscles and the size restrictions of the device, an angular velocity in the range of 25 to 50 radians per second can be assumed. Using a middle range estimate of 30rad/s the average power can be related to the moment of inertia by the following equation. Pave= /2 I (302) (18) This can then be used to determine the necessary dimensions of the flywheel based on the resulting moment of inertia of approximately 0. lkgm2 . In order to achieve the high moment of inertia, a high density material like steel should be used. Given the density of steel to be 7800kg/m3 the specific mass and dimensions of the required flywheel can be determined. 17 6. Apparatus In order to test the new design concept a model was created that could be used to determine comfort and ease of use as well as measure power output. The apparatus built to test the new design consists of three main components, a flywheel, a recoil spring and pulley as well as a freewheel. These components are placed on a shaft which is mounted on a foot board using two bearing blocks. The recoil mechanism used is a recoil starter assembly from a Tecumseh engine model LAV part number 590420A. The assembly consists of a 4 1/2" diameter pulley on which the cord is wound. The spool has an inner diameter of 3 1/2" on which over four feet of working cord length is wound. The recoil spring mechanism is contained within a 2" diameter casing extended from the pulley. The entire assembly is covered by a housing structure with four mounting holes separated 4" center to center with an overall diameter of 5 inches. The cord is 1/8" thick braided rope and is attached to a handle bar made of 1" diameter aluminum pipe. The recoil mechanism and attached handle bar are pictured in Figure 5. Figure 5: The recoil mechanism is pictured with black casing and inner pulley and spring. The aluminum tube handle bar is also attached. The purpose of a freewheel, similar to a clutch bearing, is to allow rotation in one direction only. Freewheels are used on bicycles to allow forward motion due to pedaling only in one direction. The freewheel does not rotate in the forward direction, instead the freewheel locks around the shaft so that the hub and wheel roll forward with the pedaling motion. When the bike is pedaled backwards the wheel direction of rotation does not reverse because the freewheel spins about the hub instead of engaging the wheel. The freewheel in this apparatus is a Shimano 18 tooth single gear freewheel model SF-MX30. The gear grooves have an outer diameter of 3 inches and an inner diameter of 2 1/8". The shaft size is 1 1/8" with one side of the inner diameter threaded for a hub to be inserted. The total thickness of the freewheel is 5/8" with the gear grooves located in the middle with a 1/8" thickness. The freewheel is pictured attached to the hub in Figure 6. 18 Figure 6: The freewheel from a bicycle and the attached hub used to join the freewheel to the shaft In order prevent the flywheel from reversing its rotational direction during the release/recoil of the handle, the recoil pulley has been attached to the freewheel. These two parts were joined together by machining a bolt plate that allows the spinning recoil pulley to the freewheel. (The bolt plate was machined out of a small cylindrical block of aluminum with an outer diameter of 3 inches and thickness of approximately 1 inch. An inner diameter was lathed out to a diameter of 2 1/8" to allow for the freewheel to be placed inside. The inner circle has a remaining thickness of 1/8" so that the recoil mechanism can be bolted through the remaining material. A thin lip is machined on the outer edge of the cylinder block so that the freewheel can be bolted through the 1/8" gear grooves.) (Alternate bolt plate design, pressing the recoil case together with the freewheel using screws and washers-unfortunately joined the inner section of the fieewheel which did not work.) The recoil mechanism and freewheel are joined such that the shaft inside the freewheel is only spun in one direction as the handle bar is extended, but not as the cord recoils upon release. The flywheel is made of steel in the shape of a cylinder with a radius of 4.25" (10.8 cm) and a thickness of 1.2" (3 cm). The mass of the flywheel is 8 kg and the total mass of the shaft and attached hub is less than .5kg and with a small radius, it does not significantly affect the moment of inertia calculation. The flywheel with these dimensions therefore results in a moment of inertia equal to 0.1 kgm2 . The flywheel is mounted on the shaft with a bearing made. A shaft of outer diameter 1" runs through the flywheel and through the freewheel. 19 Figure 7: The steel flywheel is shown with bored hole for shaft and milled slot for a pin to hold the flywheel stationary on the shaft. The bright pink tape shown was used to count the revolutions per minute. The recoil pulley and freewheel assembly is located at one end of the shaft, while the flywheel is located approximately in the middle of the shaft. The shaft is supported by two bearing blocks on either side of the flywheel. The bearing blocks are approximately seven inches tall allowing sufficient clearance for the flywheel to rotate. The blocks are mounted on a footplate with dimensions 12 inches by 10 inches. The complete assembly is pictured below in Figure 8. t igure : Shows the model as it was used to test the new design concept. The recoil mechanism and handle bar are located on the left and the flywheel on the right with the shaft running through both. 20 7. Procedure The apparatus built was used to test the proposed redesign. In order to determine the suitability of the new model, several experiments were performed to test the major requirements of the product. The most important requirement of the product is that it is able to provide sufficient power to run the Kinkajou projector while maintaining a 10 to 1 use to charge ratio. The ease of understanding how to use the product and the comfort during use are also major considerations. In order to measure these parameters several individuals tested the model and completed short surveys on the use of the model. In order to judge the ease of movement a survey was given to a range of individuals who rated the model in several areas. The survey questions included how well the individual understood the use and associated motion of the device, how comfortable they felt when completing the motion and how much effort was required for them to pull for a timed period. In addition any possible discomforts experienced were recorded. Additionally, timed tests were completed in which an individual pulled at a specified stroke rate for a period of three to five minutes. The rotational velocity was recorded as well as the user's estimated tiredness. The rotationally velocity was measured by counting the revolutions of a highlighted tape on the flywheel and dividing by the time interval used. In order to maintain consistency, the same participant tested the model at three varying rates and the number of pulls per minute was recorded in addition to the output shaft's rotational velocity. This method provides a fairly accurate measurement of the average angular velocity in rpm. Several timed tests were taken at varying stroke rates to determine the affects of pulling rate on the power output. (The model was tested by each individual in three different positions- standing upright, seated in a stool approximately 18 inches in height as well as seated on the ground. These positions were compared in terms of comfort and endurance. The output speed was measured for each test and the participants were asked to rank the comfort of the motion and position as well as the ease of pulling. The rankings for comfort and ease were based on a scale of 1 to 10, with 1 representing very easy movement and highest comfort and 10 meaning extremely hard and uncomfortable. In addition another experiment was conducted to test the importance of the stool height to comfort in relation to the user's height as well as an overall comfort level. Three participants repeated the motion on stools of varying heights and were once again asked to rank the comfort on a scale of 1-10.) A third test monitored the effect of the pulling rate on flywheel rotational velocity as well as overall projected power based on generator characteristics and formulas. The velocities found from the output shaft were used as inputs for motor power output calculations. The power available from a motor was calculated based on the motor characteristics and the motor power formula given and explained in the theory section. The final test compared individuals of different heights and weights in order to estimate the effects of strength and size on output. The product will eventually be used by men, women and probably even children in Mali, and it is important to make sure that sufficient power can be obtained by individuals will large differences in height and weight. By measuring the output of various participants with different body sizes, it is possible to determine if any necessary size or weight requirements exist. 21 8. Results The model built to test the worth and applicability of the proposed redesign consists of three main components that are joined together appropriately. The recoil mechanism allows the user to apply a force to the flywheel and have a handle bar easily retract for the next pull. The flywheel stores kinetic energy and helps to maintain the angular velocity that is converted in to power by the motor. The freewheel gives the flywheel the ability to spin only in the forwards direction as the handle bar is pulled and not reverse direction as the handle bar retracts. Several of the parts were modified from the initial plans in order to deal with parts difficult to machine or due to a lack of correctly sized material. The connection between the freewheel and the recoil pulley was also modified because the initial design did not allow the free turning of the shaft in the correct manner. The freewheel was attached by the inner shaft attachment instead of the outer chain gears that should spin with the recoil mechanism. The freewheel is somewhat counterintuitive in how it is used to spin the shaft as well as recoil correctly with the handle bar. In order to turn the shaft correctly, it is important to spin the outer gearing not the shaft connection as might be expected. By attaching the recoil pulley to the inner part of the freewheel, the shaft spins with the initial pull and stops when the handle is released instead of rotating freely. In order to fix this problem.,the extended metal casing of the recoil spring was press fit into a specially machined aluminum cylinder. The cylinder was bored out to a 2.2" inner diameter such that the freewheel could be seated inside. The gear chain outer part of the freewheel was then screwed to the top of the cylinder, fixing it in place. On the side opposite the fireewheel,the metal spring casing was press fit into a 1.9" diameter bore. A half inch diameter hole was drilled through the entire cylindrical connection piece to allow for the screw that attached the extended metal casing to the rest of the recoil pulley. In order for the shaft to rotate more smoothly in the bearing blocks, Delrin journal bearings were machined to fit the shaft holes and allow the shaft to rotate easily. Ball bearing could have been used, but were not considered necessary due to the relatively low speeds and loads. The assembled model was initially difficult to pull due to insufficient support from the bearing blocks. When the handle was pulled, the cord only extended about 4 inches and then stopped. When examined more closely, it was found that the applied force was tilting the first bearing block out of alignment and preventing the shaft from rotating. In order to fix this problem the support was moved closer to the recoil mechanism where the force is applied and an additional bracket was attached to the base to prevent movement in the forward direction. The addition of a small support for the recoil pulley was also added to ensure the outer casing of the recoil mechanism did not move in relation to the user instead of forcing the shaft to move as expected. This also acted as another method to prevent the shaft from misaligning. This support was made of wood and attached to the two bottom mounting holes of the recoil pulley casing. 22 Tests of the model provided information on the power output, the ease of use and several other factors which were used to judge the applicability of the proposed redesign. Based on surveys completed by several voluntary participants information was compiled relating to the use of the product. The following chart shows the ratings of different aspects regarding the use of the model. Table 2: Shows the average ranking for several areas related to the use of the model. Aspect of Use Understanding of Use Average Rank 1.0 Comfort standing Comfort Sitting in Chair 6.2 _ 2.2 3 Comfort Sitting on Floor Each criterion is ranked from 1 to 10 with one being the best or highest rating. The understanding of motion was judged very well, receiving mostly ones and twos. The ease of motion was judged separately for each of the three positions-standing, sitting on a chair and sitting upon the floor. Sitting on a chair is shown to be the most comfortable position based on the individuals tested. Several tests were performed on the model to test its power output. The following graph show the average rotational velocity's achieved during tests of varying stroke rates. Stroke Rate v. Rotational Velocity -O 20 18 _. 16. 14 o 12 ,>' . 10 8 c 0· 6 u 4 0 0.5 1 1.5 2 2.5 Stroke Rate (pulls/s) Figure 9: Graph of stroke rate vs. the rotational velocity of the flywheel based on one user varying the pulling rate of the handle bar. 23 These tests were performed by the same individual so that the only parameter changed is the stroke rate. The resulting change in average rotational velocity is recorded. These numbers follow the expected trend as a slower stroke rate provides less torque and momentum and allows the flywheel to slow. A high stroke rate adds additional torque to help maintain the flywheel speed and will result in higher power outputs. Using the flywheel kinetic energy equation, the average rotational velocity can be converted to expected power output. Figure 10 shows the expected power output as a function of stroke rate. Estimated Power Output v Stroke Rate LDU ............. ...... L_ 200 ................... --------- o 150 a. a 100 E * U) 50 0n 0 0.5 1 1.5 2 2.5 Stroke Rate (pulls/s) Figure 10: The estimated power output is graphed against the stroke rate using the motor equation relating power output to input rotational velocity. The graph predicts that the model will provide sufficient power for stroke rates of somewhere around .5 pulls per second. Lower stroke rates were not tested, but it would be expected that they follow the same approximately linear trend. For the higher rates the power output is much greater than necessary and more then expected. This graph is only a prediction based entirely on the speed input to the motor. These stroke rates and the resulting rotational velocities would not be sustainable. The power output for the higher rates even exceeds the limits of arm muscle expected power output of 150W. The overall cost of the product must be less than $50, so analyzing the cost of the new design is important. The cost breakdown of the components used in the model is given in Table 3. 24 Table 3: The cost breakdown of the model components and the motor which is necessary for the final design component flywheel price($) 45 freewheel recoil pulley hub other (motor) 7.5 8 15 5 7 total 87.5 The prices given are the actual retail price paid for a single part bought at a distributor. These prices are much higher than the bulk manufacturing prices of the resulting design, but provide a first analysis. The total cost over $70 does not seem unreasonable as the prices are generally marked up around 50% for retail sales. 25 9. Discussion The tests and surveys on this model are very useful in determining the applicability of this design for the desired human powered battery charger. The surveys suggest that people understand the motion expected and find it reasonably easy when sitting in a chair. Although, the surveys were completed by a limited number of individuals (less then 10), the information is still relevant for a first analysis. During these tests it became apparent that the longer stroke rates allowed the flywheel to slow greatly before the next stroke accelerated it once again. Short rapid strokes produced much higher speeds, but as expected require more effort, tiring the user more quickly. Although only the information provided is the average rotational speed, the actual rotational speed varies quite a bit during the length of each stroke with much higher velocities at the beginning of the stroke and the slowest speed just prior to the next stroke. Unfortunately the model built does not include the generator to charge the battery and the voltage output cannot be measured to actually calculate power output. For the alpha prototype design the voltage output was recorded for several tests. The voltage fluctuates dramatically with each stroke. Similar behavior would be expected for this model due to the similar motion patterns. The stroke rate tests were only performed for intervals of one minute, which due to the short time, does not provide information on the effort or endurance required to maintain these rates. A faster stroke rate, using the same force per pull, will obviously tire an individual much more quickly. For instance, pulling the handle twice per minute is quite fast and even over the short one minute period was noticeably more difficult to maintain speed. One stroke every two or three seconds seems quite possible to maintain for the 15 to 18 minutes it will take to charge the kinkajou. The power output is only estimated based on equations and motor characteristics, and assumed an 80% efficient motor. This figure is not exact, and does not include other possible losses within the model. In order to gain a more accurate prospective on the actual power output is necessary to couple the model with a motor and take measurements of the voltage output. Based on the tests completed, the power requirement of the design seems to be met, although more detailed experiments should be performed to verify the findings. The next important goal is the cost of the completed design. The model built is not the complete or refined product, but the cost of the model components can be used to gauge the expected final cost. The most costly component is the flywheel itself. The prices given in Table _ are the costs paid for an individual part ordered from a distributor, so they are significantly higher than the bulk manufacturing price. In general the cost is increased at least 50% when sold so the distributor make a profit, so the assumed bulk cost is much cheaper. Due to the simple and stationary design many of the costs of the kinkajuice design have been avoided. The not all of the components in the model are even necessary and many of them can be reduced and combined more effectively. For example, the freewheel is designed for a bicycle and is made of hardened steel which is over-engineered for this use. The hub is nor even required, but was used to simplify the building process. The only concern is how cheaply a steel flywheel can be obtained. An estimated cost of $30 would make the total cost of under $50 reasonable, but anything too much more would make it hard to meet the cost goal. 26 10. Conclusion and Recommendations The completed model provides a great deal of important information regarding the use of a flywheel driven device for a human powered battery charger. The tests show tat it should be possible to produce the minimum of 60W from a flywheel based charging device. Although tests for long periods of time were not performed, the research states that at least 100W should be a sustainable power output of the arm muscles. A flywheel is capable of storing a great deal of energy and can be used to produce energy with expected efficiencies around 80%. The tradeoff for this high efficiency comes with the need for more precision and accuracy. In order to gain these high efficiencies, flywheel storage devices utilize high quality magnetic bearings and vacuum chambers to reduce friction. Fortunately, the flywheel can still provide a great deal of power even when not engineered to such high specifications. One downside to this design is that a flywheel capable of providing sufficient power must be fairly large and heavy. The flywheel in the model weighed around 15 lbs, which is quite significant if the device is expected to be portable. On the bright side, this requirement is not as firm as some of the others, because once the device becomes cheap enough to produce and distribute, the Design that Matters team hopes to provide one charger and one projector for each village classroom. The cost requirement on the other hand is a hard number. The product must cost less then $50 when mass produced. The flywheel is the largest cost component of the model because it is such a large amount of steel. If the cost of the flywheel can be reduced to less than $30, the remaining components could possible be produced for around $20. In order to better meet this goal, reducing the size of the flywheel would help. Based on the initial tests which show power output higher than necessary, a smaller flywheel could be used while still maintaining the necessary 60 Watts. In order to make a more informed decision, more work should be done on this model to better test the power output by designing the motor connection and testing the actual measure voltage outputs. Additional research on the cost analysis of the proposed design should also be completed. The motor and overcharge protector that will be required to actually complete the design will add more costs to the product. 27 Appendix A Stroke rate data compiled stroke rate _ (pulls/s) average velocity (rot/s) average velocity (rpm) average velocity (rad/s) 0.5 1 1.5 0.8 1.8 2.5 48 108 150 5.04 11.34 15.75 2 2.8 168 17.64 Power calculated from motor equation and assuming 80% efficiency Power 83.7522 183.020513 248.923828 276.26445 80% eff. 67.00176 146.4164 199.1391 221.0116 28 Appendix B Cycling vs. Rowing 2 1.8 1.6 1.4 . s £ .... I......R, sea fi xed 1.2 1. 0.6 0.6 0.4 0.2 el 0 0 I 2 3 4 5 Tme (min) Data from Bicycling Science, David Gordon Wilson, 1982. 29