Analysis of Surface Coils Using ... for Functional Magnetic Resonance Imaging
advertisement

Analysis of Surface Coils Using Green Functions
for Functional Magnetic Resonance Imaging
by
Kenroy Cayetano
Submitted to the Department of Electrical Engineering and Computer
Science
in partial fulfillment of the requirements for the degree of
Master of Engineering in Electrical Engineering and Computer Science
at the
MASSACHUSETTS INSTITUTE OF TECH[NO--
MASSACHUSETT S INSTITUTE
OF TECHNOLOGY
February 2001
@2001 M.I.T. All rights reserved.
FJUL i I 2001
LIBRARIES
BARKER
Author
Delar ment/of Electricaffngineering and Computer Science
February 08, 2001
Certified by.
Yan Zhang
Research Affiliate
Thesis Supervisor
Certified by....
Accepted by . .
N'
Jin Au Kong
Professor of Electrical Engineering
Thesis Supervisor
,_j
Arthur C. Smith
Chairman, Department Committee on Graduate Students,
Department of Electrical Engineering and Computer Science
Analysis of Surface Coils Using Green Functions for
Functional Magnetic Resonance Imaging
by
Kenroy Cayetano
Submitted to the Department of Electrical Engineering and Computer Science
on February 08, 2001, in partial fulfillment of the
requirements for the degree of
Master of Engineering in Electrical Engineering and Computer Science
Abstract
In this thesis, the spherical dyadic Green Function of the third kind is introduced
as an analytical tool for calculating fields generated within the human brain by MRI
(Magnetic Resonance Imaging) surface coils. The work presented here will serve as
the basis for better understanding of coil properties, specifically, signal-to-noise ratio.
More complex brain models and coil geometries, including phased-array coil designs,
can be analyzed through the extension of the analysis presented in this thesis. The
motivation for this work is presented through a description of MRI and functional
MRI. The dysdic Green function is introduced and used to describe fields generated
by electric dipoles in the presence of a dielectric sphere. Then the dyadic Green
function is used to find the fields produced in a brain model, a dilectric sphere, by a
circular coil placed near the spherical body.
Thesis Supervisor: Yan Zhang
Title: Research Affiliate
Thesis Supervisor: Jin Au Kong
Title: Professor of Electrical Engineering
2
Acknowledgments
This thesis would not be possible without the help and support of many people. My
heartfelt thanks go to Professor Jin Au Kong, Dr. Yan Zhang, McLean Hospital for
their financial support, in particular the Brain Imaging Center family, I am especially
grateful to Blaise Frederick, Mike Rohan, and Perry Renshaw. Thanks to family, your
support has been invaluable during my years at MIT, thank you for the patience,
support, and to my older brother for the threats of bodily harm to speed up the
completion of my thesis. My thanks to Janine Buseman-Williams, and the BusemanWilliams family for offering me a place to stay during the holidays I couldn't make it to
California to see my family. I would also like to thank my ex-roommate Andres Tellez,
and my current roommate Olufemi Omojola for the friendship and encouragement.
Finally, I would like to thank the Brothers of Groove Phi Groove Social Fellowship,
Inc. you will always be my brothers. I'm done.
3
Contents
1
. . . . . . . . .
. . . . . . . . . . .
. . . . . . .
. . . . . . . . . . .
10
Functional Magnetic Resonance Imaging . . .
. . . . . . . . . . .
11
. . . . . . .
. . . . . . . . . . .
11
. . . . . . . . . . .
12
Phased Array Coils . . . . . . . . . . .
. . . . . . . . . . .
13
Outline of Thesis . . . . . . . . . . . . . . . .
. . . . . . . . . . .
14
1.1
Magnetic Resonance Imaging
1.2
Dedicated Receiver Coils in MRI
1.3
1.3.1
1.4
1.5
Techniques used in FMRI
Advantages of Phased Array over Single Coils
1.4.1
2
7
Introduction and Overview
8
15
Basic Principles
2.1
Field of Circular Coil (Biot-Savart) . . . . . . . . . . . . . . . . . . .
15
2.2
Basic MRI Experiment . . . . . . . . . . . . . . . . . . . . . . . . . .
16
3 Spherical Dyadic Green's Functions
20
3.1
Basic Concept of the Impulse Response . . . . . . . . . . . . . . . . .
20
3.2
Electromagnetic Theory
. . . . . . . . . . . . . . . . . . . . . . . . .
22
3.3
Spherical Dyadic Green's Functions . . . . . . . . . . . . . . . . . . .
24
31
4 Electric Dipoles
4.1
Electric Dipoles outside a Dielectric Sphere . . . . . . . . . . . . . . .
31
4.1.1
Z-directed Dipole . . . . . . . . . . . . . . . . . . . . . . . . .
31
4.1.2
X-directed Dipole . . . . . . . . . . . . . . . . . . . . . . . . .
33
4.1.3
Y-Directed Dipole . . . . . . . . . . . . . . . . . . . . . . . . .
34
4
4.2
5
6
Electric Dipoles inside a Dielectric Sphere
. . . . . . . . . . . . . . .
35
4.2.1
Z-directed Dipole . . . . . . . . . . . . . . . . . . . . . . . . .
36
4.2.2
X-directed Dipole . . . . . . . . . . . . . . . . . . . . . . . . .
38
4.2.3
Y-directed Dipole . . . . . . . . . . . . . . . . . . . . . . . . .
38
39
Dielectric Sphere and Circular Coil
5.1
Multipole Expansion Formulation (Keltner)
. . . . . . . . . . . . . .
40
5.2
Debye Potential Formulation . . . . . . . . . . . . . . . . . . . . . . .
40
5.3
Green's Function Formulation . . . . . . . . . . . . . . . . . . . . . .
41
5.4
Numerical Resuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
Conclusion
45
5
List of Figures
2-1
Flat circular coil
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2
Magnetic dipole at the origin, in the presence of a circular coil of radius
16
R , located at x = d . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
3-1
Block diagram of a system, A
. . . . . . . . . . . . . . . . . . . . . .
20
3-2
Transmission line with current source K(x) . . . . . . . . . . . . . . .
21
3-3
D ielectric sphere
27
4-1
Three orthogonal dipoles placed on the z-axis above a dielectric sphere
at z= b ........
4-2
..................................
...................................
37
Three orthogonal dipoles placed on the z-axis inside a dielectric sphere
at z = b, with a circular coil placed above the dielectric sphere. .....
5-2
36
Three orthogonal dipoles placed on the z-axis inside a dielectric sphere
at z=b, with a circular coil placed above the dielectric sphere. ....
5-1
32
Three orthogonal dipoles placed on the z-axis inside a dielectric sphere
at z=b........
4-3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
Normalized magnetic field inside dielectric sphere produced by a flat
circular coil. Field calculated using Green's function formulation plotted on the same axes with solution calculated by Keltner. . . . . . . .
6
44
Chapter 1
Introduction and Overview
Magnetic Resonance Imaging (MRI) uses the magnetic properties of certain elements'
nuclei and their interaction with a large external magnetic field, magnetic gradient
fields and radio frequency signals to produce highly detailed images of the human
body. MRI is also sometimes referred to as NMR, nuclear magnetic resonance. The
images in NMR are derived from the magnetic resonance of nuclear particles, usually
hydrogen. This paper will exclusively consider the case of hydrogen for simplicity.
MR Imaging has several hardware elements, a magnet to produce a strong homogeneous magnetic field, gradient coils to create spatially varying magnetic fields,
an RF transmitter, an RF receiver coil and a computer which controls the operation
of the scanner [1-3].
The large magnetic field is used to align the protons in the
sample. The gradient fields are used to spatially differentiate the sample along the
x, y and z axes.
The transmitter is used to excite the protons within the sample
which produces a resultant signal from the protons. This radiated signal is detected
by a receiver coil at the resonant frequency of hydrogen.
The quality of the image
is determined, in part, by the receiver coil. Increased sensitivity in the coil means
improved signal-to-noise ratio (SNR) and image quality.
There are several types of receiver coils including volume coils, surface coils and
multiple coils or phased array coils. Over the last five years experiments have demonstrated improved SNR for phased array coils over volume coils and surface coils covering the same area [5-7]. Careful and creative phased array designs can lead to further
7
improvement in coil sensitivity. In addition, arrays can be designed to maximize
sensitivity for a given region of interest, thereby optimizing the image of that area.
The first section of this chapter will briefly discuss the theory and hardware involved in Magnetic Resonance Imaging. The second section of the chapter will discuss
the use of receiver coils in MRI. From there the discussion will move on to fMRI and
the use of phased-array coils to improve the quality of MR images.
1.1
Magnetic Resonance Imaging
The underlying physical concept behind MR is nuclear spin[2]. Nuclear spin occurs in
elementary particles and nuclei that have an associated intrinsic magnetic field. The
nuclear spin of a particle in turn generates a magnetic field. This field can be thought
of as that of a bar magnet. In any given sample the magnetic fields of the particles
are randomly aligned. Therefore, the sample's net magnetic or magnetization is zero.
However, just as in the case of a magnetic compass the fields of the particles can be
aligned by applying an external magnetic field. Application of a large magnetic field
forces the nuclei to align along the magnetic field. To disrupt the alignment of a given
proton from the magnetic field it must be excited at a natural frequency called the
Larmor frequency. The Larmor frequency is given by:
f (MHz) = 42.58 Bo
(1.1)
where the uniform magnetic field,BO, is given in units of Teslas.Nuclei excited at the
Larmor frequency are removed from their equilibrium state and emit electromagnetic
energy equal to 1.7 x 10-7 eV/T at the same frequency.
As indicated by the discussion above, to perform MRI a strong uniform magnetic
field is required. MRI scanners currently in use range from the low-field 0.35 Tesla
to 9.4 Tesla. In Magnetic Resonance Spectroscopy field strengths of up to 11.7 Tesla
are in routine use. The type of magnets used for MR. usually belong to one of three
types; permanent, resistive, and superconductive. The magnet used in MR is long
and cylindrical which has a constant magnetic field strength within the magnet. The
8
magnetic field produced by the magnet serves the purpose of aligning the nuclei in a
given sample. This thesis will focus on a magnetic strength of 1.5T, the most common
field strength for clinical systems. At 1.5 T the Larmor frequency is 63.86 MHz and
the energy emitted by a proton disrupted from it's equilibrium state is 2.6 x 10-7 eV.
In addition to the main magnetic field, magnetic field gradients are also important
to the construction of NMR images. Gradient fields are linearly differing fields which
change as a function of distance. In current human scanners gradient strengths up
to 60mT/m are available. Therefore the gradient field is small relative to the main
magnetic field. However, the gradient field serves the very important role of mapping
each position of a sample in a given direction to a corresponding frequency by spatially
altering the Larmor frequency family. For example, for a gradient field of 10mT/m
along the x-axis used in imaging the head. At this point the coordinate convention
should be clearly stated. The z-axis is given as the direction along the main magnetic
field. The x-axis is from left to right, and the y-axis is the vertical axis. Though
gradients are referred to as being in the x, y and z-axes, only the z component of the
gradient field affects the detected resonances. The direction of the gradient indicates
that the field strength changes as a function of the given direction. Therefore in the
example above, assuming the head to be 6 inches across or 15 cm, there is a difference
of 1.50mT in magnetic field strength across the head. Gradients are generated in such
a way that the gradient field is 0 at the center of the head, which means that one
side of the head as a negative offset and the other a positive offset. The addition
of the gradient field changes the Larmor frequency of the nuclei at a given distance
by an additional 42.58 kHz/mT. Therefore each position along the x-axis maps to a
unique frequency. In this case the frequency range over the head is 63.87kHz. This
concept can be extended to obtain similar frequency-position mapping for 2-D and
3-D sections using all three gradient directions.
With the main magnetic field and gradient fields in place the protons can now
be excited at Larmor frequency. To excite the sample at the appropriate frequency
an RF transmitter is used. Ideally the sample is excited uniformly along the axis
of interest.
To achieve uniform excitation, the transmission is usually done by a
9
large RF coil housed within the bore of the magnet, which has been designed for
maximum field homogeneity. Once the sample is excited the energy emitted by the
nuclei within the sample is picked up by the receiver coil. In some cases the same coil
is used for reception and transmission of the RF signals. In other cases the reception
and transmission are done using two independent coils.
1.2
Dedicated Receiver Coils in MRI
The use of dedicated receiver coils in MRI has several advantages and disadvantages.
It allows for optimization of both the transmitter and receiver.
Transmitters and
receivers are designed for different characteristics. An ideal receiver would concentrate
all of it's energy in a specified region of interest.
should have a homogeneous field profile.
However, an ideal transmitter
Having a dedicated receiver coil allows
for individual design of receiver and transmitter coils. One disadvantage of having a
dedicated receiver coil is the necessity to completely decouple the transmitter from the
receiver. This can be done in a number of ways, the method employed for this thesis
is to completely turn off or "blank" the transmitter during reception, and to change
the resonant frequency of the receiver coil during the transmission of the excitation
signal. Systems using a dedicated receiver coil have improved signal-to-noise ratio
over systems using a single coil as the transmitter and receiver. Consideration of the
different requirements for the two coils leads to the improved signal-to-noise-ratio. In
the case where a larger coil is used to maximize the uniformity of the transmitting
signal, the SNR is diminished by losses in the sample which couple into the receiving
coil. As the coil becomes smaller, the region it covers becomes smaller, therefore
decreasing the amount of noise coupling back into the receiver coil. However, in the
case where a smaller coil is used to improve the SNR of the receiver coil, the resultant
magnetic field is more inhomogeneous over the sample meaning that the coil does not
serve as a good transmitter.
10
1.3
Functional Magnetic Resonance Imaging
Functional Magnetic Resonance Imaging, fMRI, can be described as MRI methods
which attempt to quantify local brain functionality and activity. FMRI methods produce images of activated brain regions by detecting indirect effects of neural activity
in local blood volume, flow and oxygen saturation[3]. The three most common measures of brain activity are cerebral blood volume (CBV), cerebral blood flow (CBF),
and blood oxygenation level-dependent (BOLD) contrast, which relies on the paramagnetic properties of deoxygenated blood to enhance signal contrast.
Functional imaging is used to further investigate the relationship between brain
structure, function, and pathology. It can be used to link regions of the brain to vision,
motion, hearing, mental tasks, mental illness, chemical stimulation, etc. Functional
MRI has been used to show a relationship between blood flow to the frontal lobes and
psychotic behavior. It has been observed that schizophrenics fail to show increases in
blood flow to the frontal lobes during certain tasks as compared with control subjects.
In addition to mapping certain mental and neurological illnesses to specific areas of
the brain, fMRI is useful in mapping brain function. For example, fM'vRI can be
used in identifying the primary and secondary activations sites in vision, auditory,
language, and motor tasks.
1.3.1
Techniques used in FMRI
Functional MRI is heavily dependent on several elements including imaging hardware, imaging transmission sequence, contrast agents, and hemodynamics. Though
imaging is highly dependent on the type of sequence used, because of it's complexity
the theory behind sequence choice will not be treated in this thesis. In this section,
contrast agents along with the hemodynamics related to neuronal activity will be
explored further. The hemodynamic response of neuronal activity is measured using
CBF, CBV, or BOLD imaging. CBV and CBF measurements are made using contrast
agents. Some contrast agents are used to introduce more paramagnetic material into
the blood which causes some distortion around blood vessels as blood flow/volume
11
increases.
Other contrast agents are used to enhance the overall resolution of the
imaging process. BOLD imaging uses blood oxygenation and deoxyhemoglobin concentration as contrast agents. Depending on the choice of sequence, deoxyhemoglobin,
because it is paramagnetic, creates a magnetic inhomogeneity in the immediate area
leading to a decrease in local signal. Conversely for a decrease in deoxyhemoglobin
concentration there is an increase in the local signal intensity. During activation
oxygen delivery increases. Though the oxygen delivered to the activated region increase, the rate of oxygen extraction is not increased as much[3]. As a result of this
disparity between oxygen delivered and extracted, the overall blood oxygenation increases and the concen-tration of deoxyhemoglobin decreases. This means that there
is an increase in the local signal intensity during activation. The result discussed
above indicates that increases in local blood flow and volume leads to increases in
blood-oxygenation which in turn increased the local MRI signal.
In CBF and CBV techniques signal changes of up to 20% can be achieved, however signal changes are generally less than 5%. BOLD imaging leads to average signal
changes of approximately 4.7%[3]. These small signal changes highlights the importance of the SNR of the overall imaging process. Improving the SNR of the imaging
process directly adds to the amount of useful information that can be ascertained by
using the aforementioned fMRI techniques. This is the major motivation for using
phased array receiver coils.
1.4
Advantages of Phased Array over Single Coils
In fMRI the name of the game is SNR. Phased array coils offer a clear improvement in
SNR over single surface coils. It has been shown
[41
that the noise in a circular receiver
coil increases rapidly as a function of the coil's radius. Thus a carefully designed
phased array made up of a smaller circular coils will have greater sensitivity than
one circular coil designed to cover the same area. In addition, proper reconstruction
of the image also serves to optimize the SNR of the phased array. Experiments
conducted in 1995, Wald, et. al [5] found phased array coils to improve the SNR
12
by 27 to 36 percent. Experiments conducted in 1998 found a four coil phased array
to improve the SNR by 1.5 in the visual cortex and by 3.1 in the visual association
cortex as compared to a large circular coil, Frederick, et. al[6]. The same publication
also reports an improvement by a factor of five for another four coil design. Such
improvements in signal-to-noise ratio reinforces the importance of phased array coils
as a tool in NMR imaging.
1.4.1
Phased Array Coils
Phased array coils are multiple receiver coils used in imaging simultaneously to obtain
an image. The final image obtained by the array is the reconstructed image taken
from the signals received by the coils. As described by Wright and Wald [7], surface
coil arrays were first used in MRI as switched coils. In this configuration, coils were
used individually or in combinations for images of different regions. The next step
was to start using the coils simultaneously, in which case large areas can be imaged in
the same time required to image using one surface coil, but without the SNR issues
involved in using a large coil.
As discussed earlier, results using phased array coils have been very positive. The
gain in SNR for phased arrays is derived from the coherent addition of each array
element's signal and the incoherent addition of their respective noises.
For ideal
operation of phased array coils the magnetic field of each coil must be completely
decoupled from those of every other coil in the array. However, complete decoupling
is nearly, if not entirely impossible to ascertain. For practical purposes, it is sufficient
to decouple magnetic fields where they are strongest. The signal-to-noise ratio is
maximized by minimizing the mutual reactances and resistances, the interactions,
between array elements.
As described by Wright and Wald, the mutual reactance, or inductance, determines the degree to which two elements in an array operate as a single coil. Therefore,
high mutual inductance or severe coupling defeats the purpose of the phased array.
Similarly, the mutual resistance determines the degree to which noise is correlated
between two coils. Summarizing, it is important that the coils be decoupled to insure
13
that each coil serves as an independent coil and to prevent noise from one coil from
coupling into another coil. Currently phased arrays consist of four independent coils,
primarily due to hardware and cost constraints. Though more coils can be used in
practice, decoupling four coils already presents quite a challenge.
1.5
Outline of Thesis
The goal of this thesis is to further the understanding of phased array coils. There are
three key concepts required to understand how phased arrays work (1) the individual
coil profiles, (2) individual noise properties of array elements, and (3) independence
(mutual reactances and resistances) of coils. The work done here will focus on the first
of the three. Further work is necessary for the second and third element. However,
these two areas have been the topic of extensive research in the MRI community.
In the work done for this thesis, the human head is modeled by a dielectric sphere.
Electric dyadic Green's functions for a spherical body are used to analyze the fields
generated by a randomly directed, randomly positioned hertizian dipole located either
inside or outside of a dielectric sphere. Chapter Two introduces two methods used to
analyze the relationship between a location and a coil. Chapter Three introduces the
spherical Green's functions used to analyze the fields generated by a source placed
inside or outside a dielectric sphere. In Chapter Four the Green's functions are used to
calculate the fields generated by electric dipoles placed inside and outside a dielectric
sphere. In Chapter Five the field calculated for a flat coil placed coaxially with a
dielectric sphere is compared to work done by Jin (1998) and Keltner, et. al. (1990).
Chapter Five also includes the conclusion and discussion of steps to be taken to
further this research.
14
Chapter 2
Basic Principles
There are two approaches that can be used to find the relationship between the rf
signal on a receiver coil and a position (Ro, 0Oo
,# q). The first approach is to find
the overall field profile of the coil and solving specifically at the point of interest.
The second approach is to find the signal induced on the coil by a magnetic moment
placed at the position (RO, 00,
# o).
This chapter will focus on understanding these
two approaches in their simplest forms.
2.1
Field of Circular Coil (Biot-Savart)
For a circular coil of radius a carrying a current I, the magnetic field, B(r), at any
point P can be calculated using Biot-Savart's law
BJ(r) =
dI x f
p0I
d 3
4,r fc r
(2.1)
The simplest case occurs when the point P is located on the same axis as the coil
such as in Figure 2-1. For this case, the B-field only has a z or on-axis component.
For this kind of problem the Biot-Savart law can be easily applied, leading to the
following solution
2(z)
-
jPOI
22w
4(z)=(
z2 a22 do
2
+ a 2 )3 / 2
pola
oa 2
4_~
(2.2)
2(z2 + a2)3/2Z
However, if the point P is moved off the axis the field will have both radial, p,
and z components. Additionally, the solution becomes more involved. The magnetic
15
kZ
P
Figure 2-1: Flat circular coil
field at an off-axis position (p, <, z) is given by the following expressions[8]
pl
Bz =
B =
K(k) +
4-Fi1k
4
1
-
a2 -p2
(a
F
Ik -K(k)
ap L
-
z2
2
p) + Z2
a2
+
(a
- p) 2
k) ]
(2.3)
P2 + z2
+
z2
(2.4)
I
where the constant k is given by
4ap
k
2
(a + p)2 + z
(2.5)
and the functions K(k) and E(k) are Legendre's complete elliptic integrals of the first
and second kinds, respectively,
K(k) =
E(k)
2.2
7
10
sO
V/1 - k2 sin2 0
1
-
k2sin 2OdO
(2.6)
(2.7)
Basic MRI Experiment
As described in Chapter 1, NMR relies on the magnetic field resulting from an element's nuclear spin.
The field produced by the excited sample is used to induce
a voltage in a nearby receiver coil.
The voltage from the receiver coil is used to
16
construct the image of the sample. Therefore, the most basic MRI experiment is a
single oscillating magnetic moment and a receiver coil. The simplest coil geometry is
a circular coil. This rudimentary experiment is the basic building block for the work
discussed in this paper.
Figure 2-2 shows an oscillating magnetic moment at the origin which induces a
signal in a circular coil. The circular coil has radius R and is located at x = d.
The magnetic moment is located at the origin and has a magnetization vector of
M0 [{ cos(wt) -
Qsin(wt)].
47r
Figure 2-2: Magnetic dipole at the origin, in the presence of a circular coil of radius
R, located at x = d
The field produced by the magnetic moment
is defined as [9]
D0
B(f, t) =
[3F
f ([ - M) - MI]
(2.8)
Qsin (Wt)]
(2.9)
zsin o
(2.10)
where
I =- M, ['- Cos (Wt) r
- Id
- +
r
Qp cos 6+
d
The magnetic field produced by the moment induces a voltage in the coil which is
given by
V =
at ,
17
B (f, t) -dA
(.1
where dA is the infintesimal area of the circular coil and is perpendicular to the plane
in which the coil lies. Therefore, for this problem the induced coil signal is exclusively
a function of the B-field's x-component. The integral becomes
f Bx(,
V
(2.12)
t)dA
at A
where
(,=43 [(3d 2
) cos(wt) + 3pd cos o sin(wt)
-
(2.13)
leading to a result of
V =
-
at
f B(i, t) -dA = WpoMo R 2 sin(Wt)
4
2
(R 2+ d2)(,
(2.14)
This solution shows the same dependence on distance as to the Biot-Savart solution.
Furthermore, as in the case of the Biot-Savart law the solution is dramatically complicated by placing the moment off axis, at a point (x, y, z). The solution becomes
the sum of the following integrals
V1 =
at
V2 = --
V3
a
at
cos(wt)
sin(wt)
at
4T
a
at
4w7
0
2,
-x
y
r
dp dO
(2.15)
dp dO
(2.16)
R 3(d - x pcos 0
110 1
4-
)2
r
o
po
cos(wt)
3(d -
f2,rfR 3(d
Rp
1ptMo
Po A
V4 =
100p
47
a
- sin(wt)
f 2 ,efR
[LpoMo
r
po
2,r
o
R
1
p
dp d
p dp dO
r do
(2.17)
(2.18)
Where 0 is defined as the angle from the x axis at x = d to a point on the circular
coil, p is the distance from (d, 0, 0) to any point on the surface of the coil. And the
distance r is now given by
r =
(d - x)2 + (pcos0 - y) 2 + (psin 0 - z) 2
which further complicates the four integrals above.
18
(2.19)
Fortunately, in the Green's function formulation of both approaches the complexity is not so dramatically altered to the positioning of the observation point. Each
approach has its own set of implications on the other two key concepts of phased
arrays. The first approach, which uses an assumed current in the loop, generates the
B-field of the coil, which makes the noise calculation more straight forward. In much
of the literature concerning the calculation of noise in RF coils the density of the
loop is assumed, which is consistent with this approach. However, for slightly more
complicated coils the solution becomes more difficult to compute. This is easy to
see that in the case of the Biot-Savart law a change in the coil's geometry will affect
the position vector, R, as well as the vector, dl, leading to a much more complicated
integral. The same holds true for the Green's function formulation, where the field is
determined by integrating over the current density of the coil.
Conversely, the second approach has the benefit of decoupling the field strength
from the coil geometry. This allows for the fairly straight forward comparison of
various coils at a particular region of interest. Since, the B-field remains the same,
the only calculation is the integration of the magnetic flux through the coil's area
which produces the measured RF signal. Therefore, changes in the coil's geometry do
not complicate the problem too much. However, this approach further complicates
the noise calculation. In the literature concerning noise and coil interactions in phased
arrays, the calculations for mutual reactance and resistance are highly dependent on
the field profile of the coil. As stated, the actual field profile is not calculated in this
approach, which presents a problem if one hopes to calculate mutual reactance and
resistance based on the conventional method [7].
The ideal approach is more than likely a combination of the two, where for single
coils the second approach is simplest, because interaction with other coils is not a
consideration. For multiple coils where interaction with other coils is of concern, the
decision is more difficult. The choice will be based on the elements in the array and
the method used for calculating the noise as well as the interaction between individual
coils.
19
Chapter 3
Spherical Dyadic Green's Functions
Chapter Three introduces the dyadic Green's function by first reviewing two underlying concepts.
The first of which is the impulse response.
The impulse response
developed in system's analysis serves as a time analog to the one-dimensional scalar
Green's function. Then electomagnetic theory is briefly reviewed in Section 3.2. The
spherical vector waves, of which the dyadic Green's functions consist of, are derived
through Maxwell's equations. The impulse response is presented to describe the generality of dyadic Green's function.
3.1
Basic Concept of the Impulse Response
The impulse response, h(t), of a system A is defined as the output of the system when
the input, x(t), is the dirac delta function, 6(t),
X(f)
System A
[10].
0
Figure 3-1: Block diagram of a system, A
If a linear time-invariant system, A, has an impulse response h(t) then the output,
20
y(t), for an input x(t) is given by
y (t) = x(t) * h(t)
(3.1)
A similar concept is introduced in transmission line theory where a current source,
K(x), introduced at a point x = x' leads to the following relationships
I(x)
K(x)
V
Figure 3-2: Transmission line with current source K(x)
iwLI(x)
ax
01()
Ox
(3.2)
= iwCV(x) + K(x)
(3.3)
where the constants L and C are the distributed inductance and capacitance of the
transmision line, respectively. Eliminating I(x) the two equations reduce to the following differential equation
&2 V(X) + k 2 V(x) = iwLK(x)
OX2
(3.4)
This is known as the one-dimensional scalar wave equation, for
K(x) =
wL
(x - x')
(3.5)
the equation becomes
2
V(X) + k 2 V(x) = 6(x
-
x')
(3.6)
where k = w2 LC. The solution to this equation is the spatial analog of the timedomain impulse response described earlier in the section. The solution is the spatial
21
Green's function g(x, x'). Using the Green's function formulation the voltage across
the line at any position x is given by
go (x, x')K(x')dx'
V1(x) = -iw L
(3.7)
which is analagous to the time domain output given by
y(t) = x(t) * h(t) =
h(t)x(t -
T)
(3.8)
The specific form of g(x, x') is determined by the boundary conditions applied to
the system. The Green's function formulation takes advantage of that fact that the
system does not change. As in the case of an impulse response, the problem does not
change very much as the input changes. Therefore, to find the system's output the
only new information that is required is the form of the input.
3.2
Electromagnetic Theory
The dyadic Green's function begins with Maxwell's equations for electromagnetism
V xE
-po
Vx H+
at
(o
at
a=
t
V
V - (poH)
0
V -(oE)
p
(3.9)
(3.10)
(3.11)
(3.12)
For a time harmonic field Maxwell's equations become
V xE
=
-ipu 0 H
(3.13)
V xH =
I +iWoE0
(3.14)
-iwp
(3.15)
V - (poH)
0
(3.16)
V - (EoE)
p
(3.17)
V-
=
22
The first two equations lead to the two inhomogeneous vector wave equations
2
V x V xE-k E
=i)IOJ
(3.18)
V
(3.19)
2H
x V xH7-k
=V
x
J
With no sources the the first two Maxwell's equations can be used to derive the
two homogeneous vector wave equations
V x V x E - k 2E = 0
V x V xjH-k
2
H
(3.20)
= 0o
(3.21)
The constant k is called the wave number and has the value
(3.22)
k = a fc
Applying the identity
V xV x
V(V_ -) -,V
2A
(3.23)
and noticing that
V - ( 1 oH) = 0
(3.24)
V - (coE)
(3.25)
0
we obtain the classic electromagnetic wave equations
V 2 E + k 2E = 0
(3.26)
V 2) + k 2 7 = 0
(3.27)
It's proposed that the solution to the homogeneous vector wave equation
V
x
V
xF-k
2F=0
(3.28)
is the given by
F1
=- V x (00)
23
(3.29)
The vector e is called the piloting vector and chosed based on the geometry of the
specific problem. The scalar V) must satisfy the 3-D scalar wave equation
V2
+ k 2V) = 0
(3.30)
Substituting into the homogeneous vector wave equation
17 x 71 x (17 x (V)C)) - k 2(,7
X
(V) ))
=
7 x [ V x V x (d
=
V x [e(V
2
0
+ k 2 0)]
-0
k2
(3.31)
(3.32)
Additionally, a second vector F 2 can be defined as
F2 =
k
V X xV
(OC)
(3.33)
This will also be a solution to the homogeneous vector wave equation. The two
vector wave equations MA and N can now be defined as
M = V x ('ibc)
N
-1
k
Vx Vx
()
(3.34)
(3.35)
leading to the relationship
3.3
N =V
I X 1
k
(3.36)
AI =-Vx N
k
(3.37)
Spherical Dyadic Green's Functions
The purpose of this exercise is to find the field profiles of the resonant surface coils
when used for imaging of the brain. This will be done by using a dielectric spherical
body to model the human head. To analyze this problem the spherical dyadic Green's
functions are employed to describe the fields inside and outside of the sphere for
24
sources inside and outside the sphere. In the case of spherical geometry, the solutions
to the 3-D scalar wave equation are
{
{
sin
)
(o
k)
Vmn (k) =j
(mq$)
cosJ
sin
()n (k)
(kR)Pn"(cos 0)
h(
-
(3.38)
(
)
(3.39)
cos
Which leads to the following four vector wave equations
Menn(k)
-F
sin
m
j(k R)P"(cosO)
sin 0
cos
-(n
(knR)
0
)
(cos
s
jntkR)P
kR
{Pr"
(cos
0)
0
cos
sin
cosl
sin
cosI
( P, (cos 0)
n(n + 1) ' (
N mn(k)=
(Y
F
sin
(3.40)
(m)n
S108
[Rjn(kR)]
(m#)R +
kR OR
mP" (cos 0)
sin
sin 0
cos
(m)}
(3.41)
sin
M~n(k)
o0
-
-F s
Sin0
hil)(kR)P,
(cos 0)
n
DCos0)
-h)(kR)
Cos
cos
(
)
(3.42)
sin
(k
-
n(n + 1)hw,'kRP(o
()~Cos)
n
kR
{ {
9P" (cos 0)
90
cos '
{sinJ
(m0) 0 T
sin
(mo)R + k
[Rhl) (k R)
mPn"(cos 0)
sin
sin 0
cos
(mi$)~5}
(3.43)
The first solution to the scalar wave equation is finite at the origin and is used
in solving for fields propagating towards the origin. Hence, the first two vector wave
25
functions are used to denote incoming waves. The second solution to the scalar wave
equation is not finite at the origin and is used in solving for fields propagating away
from the origin. As a result, the second pair of vector wave functions are used to
denote outgoing waves. These vector wave functions form the basis for the dyadic
Green's functions.
As in the case of the scalar Green's functions the dyadic Green's functions represents the impulse response of a system. In the case of the dyadic Green's functions
the system is derived from Maxwell's equations. The following two equations are the
dyadic differental equations for the electic and magnetic dyadic functions, respectively
V
x
V xV
V
x
x
Ge(R,R')
Gm(R,R')
-
-
k2
k2 e (R, ') =16(R,
7nm(R, R)
= V
X
')
(3.44)
[1(R R')]
(3.45)
Analagous to finding the voltage across the transmission line and the time-domain
output of a linear time-invariant system, the electric and magnetic fields at any point
(R, 0,
#)
are given by
E(R) =W
E(R)
1
-
J
JfGpe(,')
m(R,
-J(R')dV'
R') -(R')dV'
(3.46)
(3.47)
where the incremental volume dV' is given by
dV' = (R') 2 sin 0'dR'd'dO'
(3.48)
The work done for this thesis exclusively uses the electric dyadic Green's function [I1]. The magnetic field can be easily found through the application of Maxwell's
first equation to the electric field. In the case of the dielectric sphere, described in
Figure 3-3 there are two regions defined. Region 1 is outside the sphere with permittivity, co, and permeability, [to, and inside the sphere with permittivity 62 and
permeability, 1to. For a system containing two regions the solution is called a dyadic
Green's function of the third kind. The Green's function is denoted by two superscripts, the first superscript denotes the region in which the source is located and the
26
Region 1
Region 2
a
/Fi
B2
30
Figure 3-3: Dielectric sphere
second term denotes the region in which the field lies. In general, the electric field in
a region i is given by
Ei(R) = iw i
where
j
G (j)(R, R') - Tj(RI) dV'
fff3
(3.49)
may or may riot have the same value as i based on the location of the source
and the field.
The form of the dyadic Green's function is determined by the free-space dyadic
Green's function. Tai [11] finds the free-space electric dyadic Green's function to be
Geo(R, R')
I ^k2
-
-,
kR(R-R
l
ik
)+
4T
1
m,n
Crnn
{
MP() (k)A'(k) + X(1) (k)N'(k),
R > R'
M (k)H') (k) + XV(k) 7'1 (k),
R < R'
(3.50)
The problem which we're interested in has two regions. Therefore, there are a total
of four dyadic Green's functions required to compute the electric field everywhere in
the coordinate system. The four Green's functions are described by
=(I
(R, '
Ge
==(21)
Ge
(,
Ge
(R7
=(21)
,
(R, R)=G
)
=(12)
Ge
1)
(3.51)
e=oE (R, R') +
=
(2)
-
,
(3.52)
(R, R)
+
(
,22)
GQeo (R,R ) +Ges (RI R')
=(12) -
,
(RR) =Ges (RR)
27
(3.53)
(3.54)
The superscripts on the free-space Green's functions indicate the region in which
the source is located. For the scattering term in Equation 3.51, the excitation vector
is the same as the excitation vector in the free-space Green's function for R < R',
because the field is scattered by the surface. Obviously, if the field is outside the
sphere, a < R'. The field vectors describe the fields reflected back out from the surface
of the sphere. Therefore, the field vectors are for an outgoing field meaning that they
are derived from the scalar that is dependent on the spherical hankel function. Using
this information it becomes clear that the scattering term is given by
-(11)
Ges (RR) =
ik_
Cmn[A2i3M
(ki)M'
1
(ki) + B\2N(k)N'
(ki)]
(3.55)
-(21)
For the second Green's function Ge
in Equation 3.52 the excitation vector will
be the same, once again R < R'. However, since the source is outside the sphere
and the field is inside the sphere, it is obvious that the field is an incoming field.
Therefore, the field vector is for that of an incoming field. As a result this Green's
function has the form
-(21)R
Ge (2
t
, R') =
ik,
M(k 2 )M'((ki) + D2V(k2 )N'(1 (ki)]
Cmn[C
(3.56)
The scattering term in Equation 3.53 has the same excitation vector as the freespace Green's function for R > R'. The field is scattered by the surface of the sphere,
since the field is at the surface, R = a > R'.
The field vectors describe the field
reflected back into the sphere by the surface.
Therefore, the field vectors describe
incoming waves. As a result the scattering term of the Green's function has the form
=(22)
Gg,
-
-,
(R, R)
-
>
(k)
(2)
Cmn[An M(k 2 )M'(k 2 ) + B 23 N(k2 )N'(k 2 )]
(3.57)
=(12)
The fourth Green's function, G.
given by Equation 3.54 has the same excitation
,
(22)
vectors as the scattering term in C6
. Unlike the scattering term, the field vectors
describe the field transmitted through the surface of the sphere.
As a result this
Green's function has the form
-(12)
e
(R, R) =
G (eI ?, ~?')
ik2[
4
()
II+
E
Cmn[Cn M'
rn ,n
27 ()
(k 2 )M'(k 2 ) + D2)N'
(ki)N'(k2 )]
f
28
(3.58)
To find the constants AM9, BMj, CM', and DM9, the boundary conditions for electromagnetic fields,
i x [E1 (R) - E 2 (R)] = 0
(3.59)
h1 x [H1 (R) - H 2 (R)] = 0
(3.60)
are generalized to the dyadic Green's functions on the surface of the sphere. The
boundary conditions become
Nx
1
Nx
~
G
(11)
V x G
=
x
1_
-
(3.61)
Ge
x21x
R x V x
Nx
=G
)
3.2
(3.62)
Applying Equations 3.61 and 3.62 at the surface of the sphere, the four constants
are found to be
A
-
-[Plji,(P)'iIP2)
h$2 l)(p 1)[p 2 jn(p2 )j]
71
[P2jfl(o2)1'jfl(l)
p h (1)
-
[Pljn(P1)]'Jn(P2)
BC(1 =P
]'(plI'jn(p2)
[P2jn(P2)]'jn(Pl)
h(') (p1 )[p 2 j, (p2 )]' - [pih$2 (pi)]'jn(p2 )
C
D
-=
(
(.3
(3.63)
(3.64)
{Pj(p 1)]'h(' (p1) - [PIjn(p)'hk (p1)
hn(p1) )[p2jn (p2)]' - [pihn(1 (p)]jn(p02)(
(3.65)
[pIjn (pi)]'h(2 )(p1 ) - [pIjn(p 1 )]'h(1)(p1 )
h ' (pI)[p2 jn (p 2)j' - (L) [p 1h('(p 1 )]'Jn(p 2 )
(3.66)
-5
where the variables pi and P2 are defined as below
p = k1a, P2 = k2 a
and
Cmn(k) = (2 - 60)
(n-rn)!
n(n + 1) (n +in)!
(3.67)
The constants A(2), B(2), Cn2), and D(2), are found in a similar manner by applying
the following boundary conditions at the surface of the sphere
Rxje
1
x-(22)
=RxGe
1
2XVXGe
P2
Ii
29
x
(3.68)
xNx
RxVxIxG(
(3.69)
Applying the boundary conditions, the four constants are found to be
=[pih') (pi)]'h)(p2) (2)[
C
nC
D(2)
[pih$9(p11 )]'jn(p2 )
P2)
[n (p2h)(P
) )'h)(pi)
hPI(p 1 )[p 2 j(p 2 )'
- [pih$J (pl)]'n(p
n
(
2
l-
p h$)(p 2 )]'h)(p1)
h?)p1)p~j~p2]''
(2) -
)p~jn)]'h)(P2) 2hn (pi) [p2 j (p
n 2 )]'-
2
[p
2j(p
2 )]'h)(p2)
[pih
n)(p
)]'j (p2 )
(3.71)
2)
(37)
[p2jn (p2)]'h) (P2) - [p2jn (p2 )]'h) (p2 )
)h (pi) [pij-n(pi)]' - ( ) [p1i$h2 1 (p1)]'jn(p2)
30
(3.70)
(3.73)
Chapter 4
Electric Dipoles
This chapter gives the solution to x, y and z directed dipoles placed inside and outside
a dielectric sphere using the Green's function formulation. Each dipole is placed on
the z-axis at R' = b. However, each solution can easily be generalized for a dipole
placed off the z-axis. The solutions for dipoles placed outside the sphere are over the
region inside the sphere, R < a, and the solutions for dipoles placed inside the sphere
are given over the region outside the sphere, R > a.
4.1
Electric Dipoles outside a Dielectric Sphere
The case of a dipole placed outside, Figure 4-1, the sphere will be calculated first.
Understanding the field profile of an arbitrarily oriented and positioned electric dipole
lends itself to understanding and calculating the fields of more complicated current
densities, using techniques such as method of moments.
4.1.1
Z-directed Dipole
Of the three dipoles, the simplest is the z-directed dipole. For a z-directed dipole on
the z-axis the eigenvalue m is zero. The current density of a z-directed electric dipole
placed at z = b is given by:
6 (fRI - b) 6(o')
J2
b sin 0'
31
Z=
(4.1)
Region 1
b
Reg on2
Figure 4-1: Three orthogonal dipoles placed on the z-axis above a dielectric sphere
at z = b
where
2 =cos 0 -
sin0
(4.2)
The electric field inside the sphere (Region 2) for a source outside the sphere
(Region 1) is given by the following equation:
E 2 (R)
- i1O
=
I
wpuk
J(R')dV'
S Cmn fJJ[C
1
)M (k 2 )''
(k 2 )
+ D')N(k2 )N'(' (k,)] - J(R)dV'
(4.3)
For m = 0:
II
(ki) -
0
(4.4)
The expression for the electric field is reduced to the following:
E2(1?)
=
-pok1
4w
-
.woki
mn
CmnD(')N(k 2 )
n
fffV
Iii
(k1 ) -I a(R'2 b)6(0 ) d'
b Sin 0'
CmnD(1)(k2) n(n + 1) h()(k b)
47
mn
4
m,n
b
,oi
(2n + 1)D
n(n+1)
+ iP
{r(7
1
(p
Pb
Pn(COS0)+
32
[pjn(p)]'
[Pn(COs0)]
00
(45)
( .5
Since m = 0 and 0' = 0 only the theta component of the source term remains.
Therefore, only the even part of the field function, Nen(k 2), remains as a part of the
electric field. The 0 dependence is zero because of the multiplication by m. It makes
sense that there is no 0 dependence in the Electric field because the source as well as
the region are both symmetrical about the z-axis.
4.1.2
X-directed Dipole
An x-directed dipole located on the z-axis at
-,
J (R') =2Ii
J(R)~I
(
6(R' - b)6(0')6(0')
b2 sin0
,
(4.6)
x
where
R sin0 cosq +5 cos 0 cosq$- # sin
#
(4.7)
The electric field inside the sphere is given by:
E ~P
E 2 (R) =
iwpo
=
l
-wk
G(21)
1
-
JP
~
J(R')dV'
[CJc
) (k2)'(1)(k
C
+ D 1)N(k 2 )N'(l) (k1 )] - J(R)dV'
2
)
(4.8)
Given the location and direction of the source, only the 0 component of the vector
wave functions survive the dot product with the source. Separating the two parts,
the integral can be decomposed into the following two integrals:
A
fff
'N(ki ) -I (R' -b)('6'
b2 Sin Of
Ai(ki
-
d'
'MV,
Ih P(cos 00)
sin 00
m=1
=
I
h(')(pb) n(n + 1)
sin0 0
I
2
sin00
+1)(4.9)
2
\U
and
B
=
[f
'(k
1
I(R' - b)6(0')3(/') dV'
33
b2 Sin 0'
-
[Pbh()(Pb)]'
0[P1 7(cos 00)]
00
Pb
n(n + 1) [Pbh$)(Pb)]
2
Pb
mi
(4.10)
where 00 = 0.
As a result of the source's location and direction, the field terms are given by
M0 n (k2 ) and Nein(k 2 ). Using the two results from Equations 4.9 and 4.10 the electric
field inside the sphere can be expressed as:
wp ok
0
E 2 (R)
wptoki
-
47
(2n + 1
1
(2n+1)
S
manhn+1)
Pn (cos 0)
( n
(p)
sin0
+ IPbhM)(pb)]
Pb
pinp)]'
+_____)I
p
4.1.3
L
C1 M(k 2 )h0(Pb) + D
C
N)(k2)
(Pb
)
h0) (Pb)
m[(COS 0)]\
s#5O- jn( p) 91 7 (oo1sin
co
\(
#14
(cos
0) 0) COSsn1R
7M(COS
SOO-+)
(P)
n(n±+1) i(P
P
(P(cos0)]
nCOS
#0 - P_ (cos0)
sin
_
sin 0
0
)}
$$
(4.11)
Y-Directed Dipole
Similar to the x-directed dipole, the y-directed dipole located on the z-axis at z = b is
said to be at (b,0, (). Once again, the value of 0' denotes the direction of the dipole.
The current density of this dipole is given by:
,6(fR'
- b)6(0')6(0' - E
^
b sin 0'
2
(4.12)
where
R sin 0 sin q + 0 cos 0 sin #5+
cos
(4.13)
The electric field inside the sphere once again is given by Equation 4.8. Given
the location and direction of the source, only the 0 component of the vector wave
functions survive the dot product with the source. As in the case of the x-directed
dipole, the integral can be decomposed into the two following integrals:
A
JJJMHI(k
1
6(R' - b)6(0')6(') MdV
)
b2 sin 0'
34
pm (Cos00)
Sill Oo
-IhQ(n
m=1
h9(Pb) n(n +1)
sin 00
2
n(n + 1
2
)
sin O0
sib)
(4.14)
and
)dV
f ff'0)(k1) I 6R'- b2b)s(0'(0
Sin 0'1d
B
-LPbh$ )(Pb)]'[Pm (cos 0o)]
&00
Pb
m=1
1
n(n + 1) [Pbhl) (Pb)]'
2
(4.15)
Pb
The integral B has the same value as that as B for the x-directed dipole and A
has the opposite value of A for the y-directed dipole. In the case of the y-directed
dipole the field terms are given by MAon(k 2 ) and Nein(k 2 ). Using the two integrals
above the total electric field inside the sphere for a y-directed dipole is found to be:
E 2 (R)
=
wj10 k1
47
(2n + 1)
mnn 71(71
wbioki
47r
(P)
mn
C 'Af(k 2 )h')(Pb) + D(')7N(k 2 ) [Pb h(Pb)]'
+ 1)
(2n + 1)
n(n + 1)
C (lh)(Pb)
P (cos 0) .
sin 00
n0
I [Pr
jn(P)
(3n
[Pbh(1)(pb)]'
+D~~~l
-- p
(
n
+ 1)
[,j(~)
Fop(COS0)
m
1
+pjn(p)]'
p
[
0[Pn
.
P
(cos 0)]
cos
q5 )
PM(cos 0) sin
N
0
7
sin $0 - P
0
(COS 0)
cos
sin 0
0k1)
(4.16)
It should be explicitly stated that for both x and y directed dipoles m has a value
of one.
4.2
Electric Dipoles inside a Dielectric Sphere
Now, attention is given to the case of an electric dipole placed inside the dielectric
sphere, b < a, as in Figure 4-2. Finding the electric field produced by an electric
35
Region 1
P1/
b
Region 2
Figure 4-2: Three orthogonal dipoles placed on the z-axis inside a dielectric sphere
at z=b
dipole inside the sphere easily leads to the calculation of the magnetic field produced
by a magnetic moment.
The relationship between an electric dipole's electric field and a magnetic moment's magnetic field is given by the duality principle. Therefore, by calculating the
electric field due to to an electric dipole one can calculate the signal in coil placed
outside the sphere. Figure 4-3 shows a coil located outside a dielectric sphere. This
problem is similar to the problem discussed in Chapter 2. Therefore, the general solution can be found using a similar formulation as that in the basic MRI experiment
described in Chapter 2.
4.2.1
Z-directed Dipole
As the case with the dipole outside the sphere the simplest case of the three dipoles
is the z-directed dipole where m = 0. The current density of the dipole is given by:
J(
- b))(0=)I2
b2 sin 0'
(4.17)
The electric field outside the sphere (Region 1) for a source inside the sphere (Region
2) is given by:
E1 (R)
ibiio]] Ge(2 (R, R') - _J(R')dV'
36
Figure 4-3: Three orthogonal dipoles placed on the z-axis inside a dielectric sphere
at z=b, with a circular coil placed above the dielectric sphere.
=-
) oki E Cmn
4ir
mn
[C(2 MVI 1 (ki) M'(k 2 )
+ D (2)N( (kl)N'(k 2 )] - j(R)dV'
(4.18)
As in the case of the dipole outside the sphere only N'(k 2 ) survives the dot product.
Going through the same calculations the electric field for the z-directed dipole is found
to be:
E 1 (R)
i 2
47
CmnD (2)N( (k1 )
m,n
w-ok 2
A
VJ
N(k2 )]
S(R' - b0o(0') zdV'
b2 Sin 0'
S Dn
(2)NO) (ki) n(n+)jn(k b)
Zcmn
2
kib
A m'n
k2
47
Z(2n + l)D(2)in(Pb)
pb
m ,n
n(n + 1)
h )(p)
Pn(cos 0)R +
p
[ph ()(p)]'&[Pn(cos0)]
n
p
ao
}
(4.19)
The solution is very similar to that of the z-directed dipole outside the sphere.
However, the roles of spherical Bessel functions,
h
jn(p),
and spherical Hankel functions
(p) are switched. This switch is a function of the reversal of roles of the scattering
and source terms in the Green's functions for the source outside versus having a source
inside the sphere.
37
4.2.2
X-directed Dipole
For an x-directed dipole inside the sphere the same reversal of roles occurs. Therefore,
the field outside the sphere for an x-directed dipole is given by:
E 2 (R)
pl-ok1
(2n +1)
47
m,n n(n +1)
wioki
(2n + 1)
47r
m(n + 1)
mn
C)~2j
C (p
Cn
(Pb) +
D})N (k 2 ) [Pbin(Pb)1'
Pb
I
)
nl\VOI
h () (p) Pn"(Cos 0) Cos $0 - hn
1 )(p) 0{P"(cos 0) sin $$
sin 0
00
+D
P)Jn(Pb)
Pb
(
+ 1) h
\
p
p)
)( P(Cos 0) Cos $Z
[ph' )(p)]' [0P"(cos
0)]
s
p
[
0
C
4.2.3
P m(Cos
sin 0
0) s $
Sin,
(4.20)
Y-directed Dipole
Similarly, the electric field for a y-directed dipole is given by:
wpok 1
E 2 (R)
-
47
(2n+1)
E n(n±+1)
LUpbk1
I(k2 )jn (Pb) + D()N(k 2 )
Pb
(2n+1)
i(ri+1) Cn ln(Pb)
4wr
pn (Cos 0) sin
-h)(
n(n
+ 1) h
n
+D)
C
sin 0
[PbJ
ob)
Pb
[P"(cos 0)] Cos
h )()
[ph(1 )(p)]' F[P"(cos 0)] s
00
P
38
0
0)
(p) P (cos 0) sin 0$N
P
-
P 1 (cos 0)
sin 0
1
(4.21)
Chapter 5
Dielectric Sphere and Circular Coil
The full solution for the fields generated inside a dielectric sphere by a flat circular
coil placed outside the sphere, as in Figure 5-1, was first formulated in 1990,Keltner,
et. al [13]. The problem was reformulated in 1998, by Jin, [8]. This is an important
problem in analyzing MRI surface coils, in which the human head is modeled by the
lossy dielectric sphere.
Figure 5-1: Three orthogonal dipoles placed on the z-axis inside a dielectric sphere
at z = b, with a circular coil placed above the dielectric sphere.
39
5.1
Multipole Expansion Formulation (Keltner)
The multipole expansion derived by Keltner [13] finds the magnetic fields inside the
sphere to be:
BR(R, 0) =
An
1101
rijn + 1)(2n + 1)
47
n_1
Bo(R,0)=4w Y An
4rn_1
(kR)
Pn (COS 0)j kR
(2n + 1) sin0 O[Pn (cos 0)] (n + 1)n (kR)
\ 47n(n + 1)
kR
O(cos 0)
(5.1)
-
Jn(kR)]
(5.2)
where k is the wave number inside the sphere, K is the wave number in free space
and the constant An is given by the following:
\
2
2
2
(2n + 1) (KR) h')(Kv/d + b ) dPn({)
47n(n + 1)
v/d2 + b2
k[jn (Ka)yn1 (Ka) - yn (Ka)j.n+1 (Ka)]
khn (Ka)jn+i(ka)- Kjn(ka)yn+I(Ka)
(5.3)
and
d
=/d 2
5.2
(5.4)
+ b2
Debye Potential Formulation
The solution derived by Jin [8] used the Debye potential 7
[12], which relies heavily
on the symmetry of the system's axis-symmetry. Tthe fields inside the sphere are:
EO(R)
HR(R)
Ho(R)
=
-~
anj(kR)
=1
iwioR
(5.5)
00
ann(n + 1)jn(kdR)Pn(cos0)
(5.6)
n(kdR) DPn(cos0)
(5.7)
n1
= 1
San
iwp 0 R nn
OR
0
where the constant an is given by:
hl)(ko c)[Pn (COS Oo)]'
a=ikoZoIb2 2n + I
2
an
a c 2n(n + 1) [kdj' (kda) - koh l)(koa)jn(kda)]
This result is the same as that derived by Keltner
40
(5.8)
5.3
Green's Function Formulation
A Green's function formulation was employed for this thesis to solve the circular
coil and dielectric sphere problem. Though the formulation benefits from the axissymmetry, m = 0, of the geometry, it is not limited to cases where this symmetry
applies. As in the case of the dipole outside the sphere, the electric field inside the
sphere is given by:
E 2 (R)
=
iw/o
fff G=C2
l-tpok,
(R,
R')
J(R')dV'
CfCll(k2)
+ DW)N(k
2
'
k
)N )(k1 )] - J(R)dV'
(5.9)
The current density in the coil is given by:
00 )(R'
J(R) = IJ(0'
-
)
(5.10)
where the following relationships apply:
sin
=
c = /2
b
c
-
+ d2
The dot products within the integral yield, for m = 0,
(ki) 7
=-h
(ki)
1)(kR) &[Pn (Cos 0')
a0'
0
(5.11)
(5.12)
The electric field is calculated below:
E 2 (R)
-
iwpo
1
wlok 1 I
CmC(
4w
mnCn n '
6(0' - 00 )6(R'
-
c
wj 0 k 1 1 E
2
J(R')dV'
(1(R7,R')
C
(k2)
h ((kR')
O[Pn(cosO')]
k)fffn00
c) (R') 2 sin 0'dRd'dO'
(k2)
h[P(k(c)
n00
m'n
41
cos0')] 6(0'-
aon'
00) c2 sin 6'dO'
w uok 1 I
C C1C
M(k,1h
(kac1f[Pn(cos00)1 c sin Oo)
= tok1I EnCmnC )M(k 2 )h(j)(k 1 c)
wIuok 1Ib2
2c
2
m,n
(sin00)2
0
0[P"(cos0o)] i (
CmnC < hl) (kic)
00
n0COS
n (k2R)
[Pn (cos 0)]
10
(5.13)
This solution can be massaged into the form of Equation 5.5 by further simplifying
the constants and taking advantage of some of the relationships between the spherical
bessel and hankel functions, and their derivatives.
The constant Cmn for m=O is simply:
Cmn(m = 0)
The constant, C
=
2n + 1
(n+ 1)
(5.14)
, can be decomposed into it's numerator and denominator to be
simplified. First, the numerator can be simplified using the following identity:
[pjin (p)'hn (p) - [ph(') (p)'jn (p)
ng t
p
(5.15)
And the denominator is transformed using the following relationship:
[P2jn (p2)]'h(')
(pi)
[pih('(pi)]'jn(2
a[k2 *'(P2)h2l)(p1) - ki hN (pi)j (p)
(5.16)
leading to:
[pijn(pi)]'h')(pi) - [Pijn(pi)]'h(j)(pi)
hn(' (P1) [P2jn (P2)1'
[p1h (p1)]'Jn(P2)
I
Pi a[k 2 j'(p2 )hU (p1)
-
kih'n($(pi)jn(p2 )1
(5.17)
Inserting the constant an, equation 5.8, into Jin's solution, equation 5.5 the full
expression for the electric field becomes:
E =
-ikoZoIb 2
a2 c
i.n (kdR)
jn~kR)
0 ) koc) [Pn (cos Oo)]'
2n(n + 1) [kdj'(kda) - koh )(ka)j n(kda)]
+1
002n
[Pn (cosO)]
(5.18)
0
Inserting the two constants C)
and Cmn the full solution of the Green's function
formulation is given by:
E 2 (R)
wupoIb 2
2T + 1
h,(')(kic)[Pn (cos Oo)]'
2
2a c m,n n(n + 1) [k 2 j' (p2 )hnj1(pi) - kihn (pi)jn (p )
2
jn(k 2 R)
O[P COS 0]
P0
(5.19)
e
42
Noting the following relationships:
kd= k2
ko = w VPoco = k1
ZO =V c'7
k o ZO = w po
it becomes obvious that the equations 5.18 and 5.19 are identical and te two solutions
represent the same field. The magnetic field is easily calculated by taking the curl of
the electric field.
5.4
Numerical Resuls
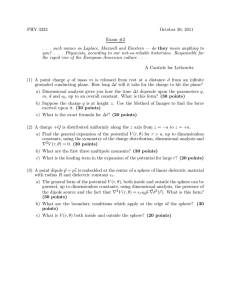
The solution for a sphere containing deionized water, c = 80, was calculated using
the Green's function formulation. The normalized magnetic field along the z-axis is
plotted against the depth from the surface of the sphere. The field is generated by a
9 cm diameter coil displaced 1 cm away from the surface of a 16 cm diameter sphere.
The field calculated using Green's functions for spherical bodies is drawn using the
solid line. Points taken from a graph of Keltner's solution is plotted on the same
axes as empty circles in Figure 5-2. The points were taken by scanning the graph of
Keltner's calculated result, and measured using Adobe Photoshop. It is clear that
there is excellent congruence between the two calculated fields.
The graph shown in Figure 5-2 represents the verification of the Green's Function
formulaton for the simple case of a flat circular coil placed coaxially above a sphere.
This is the first step in a process to find the solutions to more complicated coil shapes
and eventually more complex models of the human head. Additionally, the Green's
functions will be used to calculate the coil interactions between multiple coils and to
optimize phased-arrays based on the areas of interest in the brain.
43
Magnetic Field Profile Inside a Dielectric Sphere
(Deionized Water at 415 MHz)
---------------
1
------------
-
Green Function
Keltner
0
0.8
-- - ----------- -- -- --
I--
10.6
0 .4
-----
-----------
---- ---------------------- ----------- ----------------
0.2
I
0
2
4
8
6
10
12
14
16
Depth (cm)
Figure 5-2: Normalized magnetic field inside dielectric sphere produced by a flat
circular coil. Field calculated using Green's function formulation plotted on the same
axes with solution calculated by Keltner.
44
Chapter 6
Conclusion
Spherical Green's functions have been shown as a valuable for analyzing rf coils used
in MRI. The Green's functions are used to calculate the electric fields generated by
electric dipoles placed inside and outside a dielectric sphere, and a circular coil placed
above a dielectric sphere. Solutions to dipoles placed inside the sphere have not been
verified. However, these fields will be checked against results generated using computer simulations (FDTD). Preliminary results suggest that the fields calculated for
dipoles placed inside the dielectric sphere are accurate. The dyadic Green's formulation represents the full solution of the electromagnetic fields. This work will be
further developed to analyze more complex models of the human head as well as
more complex coil geometries. More accurate models can involve the use of layered
spheres which include the presence of various tissues in the head. The work in this
paper involves the analysis of a flat circular coil. However, in practice surface coils
are curved, cylindrically, to approximate the curve of the human head. It has been
shown, [14], that the fields generated by curved coils generate fields which are noticeably different than those produced by flat coils. Additionally, the curved coils
produced field maxima at points in space different than those porduced by flat coils.
This suggests that it is possible to vary the position of a coil's maximum field strength
by varying it's size and curvature. The generality of the Green's functions allow for
the analysis of fields associated with more complex coils as well as more complex
head models. Through analysis of individual surface coils the work presented here
45
will be extended to the analysis of phased array coils. The analysis of phased array
coils will involve the calculation of coil coupling. The coil coupling can be calculated
using the individual field profiles of each array element. The immediate next steps
include verification of the fields produced by dipoles placed inside the sphere, as well
as verification of results attained for coils placed off-axis. These two calculations will
assist significantly to the analysis of phased array coils.
46
Bibliography
[1] J.A. den Boer and M.T. Vlaardingerboek. Magnetic Resonance Imaging. New
York: Springer. 1996.
[2] R. C. Lange and R. C. Smith. UnderstandingMagnetic Resonance Imaging. New
York: CRC Press. 1998.
[3] M. F. Hartshone, J. D. Lewine, W. W. Orrison, Jr., J. D. Sanders. Functional
Brain Imaging St. Louis, MO: Mosby-Year Book, Inc. 1995.
[4] M. D. Harpen. Sample noise with circular surface coils. American Association of
Physicists. 16, 616-618. 1987.
[5] J.A. Barkovitch, L. Carvajal, P. E. Grant, S. E. Moyher, S. J. Nelson, D. B. Vigneron, L. L. Wald. Phase Array Detectors and an Automated Intensity-Correction
Algorithm for High Resolution MR Imaging of the Human Brain. Magnetic Resonance in Medicine. 34, 433-439. 1995.
[6] B. deB. Frederick, L. C. Maas III, P. F. Renshaw, L. L. Wald. A Phased Array
Echoplanar Imaging System for fMRI. Magnetic Resonance Imaging. 17, 121-129.
1999.
[7] L. L. Wald and S. M. Wright. Theory and Application of Array Coils in MR
Spectroscopy. NMR in Biomedicine 10, 394-410. 1997.
[8] Jianming Jin. emphElectromagnetic Analysis and Design in Magnetic Resonance
Imaging. New York: CRC Press. 1998.
47
[9] Jin Au Kong. Electromagnetic Wave Theory. Cambridge, MA: EMW Publishing
[10] Alan Oppenheim and Alan Willsky. Signals and Systems New Jersey: Prentice
Hall. 1997.
[11] Chen-To Tai. Dyadic Green Functions in Electromagnetic Theory. New York:
IEEE Press. 1994.
[12] Waves and Fields in Inhomogeneous Media. new York: IEEE Press. 1995.
[13] J. R. Keltner with T. F. Budinger, J. W. Carlson, M. S. Roos, S. T. S. Wong, T.
L. Wong. Electromagnetic fields of surface coil in vivo NMR at high frequencies.
Magnetic Resonance in Medicine 22, 467-480. 1991.
[14] P. A. Bottomley, R. Giaquinto, C. H. Lugo Olivieri. What is the Optimum
Phased Array Coil Design for Cardiac and Torso Magnetic Resonance? Magnetic
Resonance in Medicine 37, 591-599. 1997.
48