Finite-Difference Time-Domain Simulation of
advertisement

Finite-Difference Time-Domain Simulation of
Electromagnetic Scattering from Objects Under Random
Media
by
Christopher D.
Q. Moss
B.S. Electrical Engineering
University of Alberta, 1996
Submitted to the Department of Electrical Engineering and Computer Science
in partial fulfillment of the requirements for the degree of
Master of Science
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
May 2000
MASSACHUSETTS !NSTITUTE
OF TECHNOLOGY
@ Massachusetts Institute of Technology 2000. All rights reserved
JUN 2 2 2000
LIBRARIES
...................
A uth o r ........................
Department of Electrical Engineering and Computer Science
May 5, 2000
Certified by.....
Dr. Jin Au Kong
Professor of Electrical Engineering
Thesis Supervisor
Certified by.............
A ccepted by ...............
.....................
Dr. Y. Eric Yang
Research Scientist
Thesis Supervisor
..
Arthur C. Smith
Chairman, Department Committee on Graduate Students
1
2
Finite-Difference Time-Domain Simulation of Electromagnetic Scattering
from Objects Under Random Media
by
Christopher D.
Q. Moss
Submitted to the Department of Electrical Engineering and Computer Science
on May 5, 2000, in partial fulfillment of the
requirements for the degree of
Master of Science
Abstract
A three-dimensional Finite-Difference Time-Domain (FDTD) simulation is presented which
models the bistatic and monostatic Radar Cross Sections of objects in or beneath random
media. Previously, FDTD techniques have been applied to scattering from random rough
surfaces and randomly placed obstacles, but little has been done to simulate continuous
random media with embedded objects. The simulation model in this work can help in
interpreting the radar return from a target beneath a layer of grass, under tree foliage, or
buried in an inhomogeneous ground. Two kinds of models for describing random media are
considered in this study. The first model characterizes a random medium with an effective
permittivity. The second model uses a spatially fluctuating random permittivity directly
applied to the FDTD domain. In this work, the effective permittivity model is used to
describe a layer of foliage, and is derived from strong fluctuation theory using characteristics
of the physical medium and a correlation function. This model provides the mean scattered
field from an object in or below a random medium at various frequencies. The second
model can describe soil that has an inhomogeneous moisture profile, and is used to study
the electromagnetic scattering of a buried object. The random permittivity fluctuations are
generated using characteristics of the soil and a correlation function. Monte-Carlo analysis
is performed using an ensemble of random media whose parameters approximately describe
the geophysical medium of interest. The properties of the scattered fields from a buried
object and an object under foliage are studied using the numerical simulation techniques
developed in this work.
Thesis Supervisor: Dr. Jin Au Kong
Title: Professor of Electrical Engineering
Thesis Supervisor: Dr. Y. Eric Yang
Title: Research Scientist
Acknowledgments
I would like to thank Professor Kong for allowing me the opportunity to study in his
research group. I am grateful for the chance to learn from such an energetic and superb
teacher. I would also like to thank Dr. Eric Yang for providing me with guidance and
direction throughout this project. I am also very grateful to Dr. Fernando Teixeira for his
enthusiastic help and expert advice, especially over the last few months. Without his help,
I would have never finished this thesis on time. I would also like to thank Dr. Bob Atkins
at Lincoln Laboratory for his helpful suggestions and encouragement.
I must also thank
all of my peers in the research group, who provided a strong intellectual environment that
inspired me in my studies. In particular, Dr. Yan Zhang, Chi On Ao, Henning Braunisch,
Bae-Ian Wu, Ben Barrowes, Joe Pacheco, Peter Orondo, and Sang-Hoon Park all provided
me with advice and friendship which helped me in this project and in my understanding
of Electromagnetics. I also want to thank Vince, Tony, and Jim for making school more
enjoyable, and for subsidizing my lunch money with their losses at the poker table. Finally,
I would like to thank my parents, my sister, and Christine for their love and support.
Dedicated to My Parents
8
Contents
1
2
19
Introduction
1.1
Motivation
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
1.2
Past Work and Research Description . . . . . . . . . . . . . . . . . .
21
1.3
Outline of the Thesis . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
23
The Simulation Model
2.1
Introduction . . . . .
2.2
The Basic Finite-Difference Time-Domain Method
2.3
2.4
. . . .
23
. . . . . . . . . . . . . .
24
2.2.1
Dielectric Interfaces
. . . . . . . . . . . . . . . . . . . . . . . . . . .
27
2.2.2
Stability Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
2.2.3
Numerical Dispersion
. . . . . . . . . . . . . . . . . . . . . . . . . .
28
The Total/Scattered Field Formulation . . . . . . . . . . . . . . . . . . . . .
29
2.3.1
Problem Formulation
. . . . . . . . . . . . . . . . . . . . . . . . . .
31
2.3.2
Excitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.3.3
Incident Field Solution . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.3.4
Numerical Experiments
. . . . . . . . . . . . . . . . . . . . . . . . .
39
Perfectly Matched Layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
2.4.1
The Berenger PML . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
2.4.2
Stretched Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . .
42
2.4.3
PML Implementation
. . . . . . . . . . . . . . . . . . . . . . . . . .
43
2.4.4
Numerical Experiments
. . . . . . . . . . . . . . . . . . . . . . . ..
47
9
10
CONTENTS
2.5
2.6
3
47
2.5.1
Reciprocity Theorem . . . . . . .
. . . . . . . . . . .
49
2.5.2
Formulation . . . . . . . . . . . .
. . . . . . . . . . .
49
2.5.3
Numerical Experiments
. . . . .
. . . . . . . . . . .
52
A Conformal FDTD Technique . . . . .
. . . . . . . . . . .
54
2.6.1
Formulation . . . . . . . . . . . .
. . . . . . . . . . .
55
2.6.2
Numerical Experiments
. . . . . . . . . . .
56
. . . . .
59
3.1
Introduction . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
59
3.2
Discrete Calculus . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
60
3.3
Dispersion Relation of an Anisotropic Medium
. . .
. . . . . . . . . . .
62
3.4
Field Coefficients . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
64
3.4.1
TE Case . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
65
3.4.2
TM Case
. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
65
Reflection and Transmission Coefficients . . . . . . .
. . . . . . . . . . .
66
3.5.1
TE Case . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
66
3.5.2
TM Case . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . .
69
. . . . . . . . . . .
71
3.6
Numerical Experiments
. . . . . . . . . . . . . . . .
Random Medium Models
79
4.1
Correlation Function . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
80
4.2
Effective Permittivity Model . . . . .
. . . . . . . . . . . . . . . . . . .
80
4.2.1
Strong Fluctuation Theory
. . . . . . . . . . . . . . . . . . .
80
4.2.2
Parameters and Results
.
. . . . . . . . . . . . . . . . . . .
83
Fluctuating Permittivity Model
.
. . . . . . . . . . . . . . . . . . .
84
4.3
5
. . . . . . . . . . .
Numerical Dispersion of FDTD Anisotropic Media
3.5
4
Near-to-Far Field Transformation . . . .
Numerical Results and Analysis
91
5.1
Object Under Foliage . . . . . . . . .
91
5.1.1
93
The Cube . . . . . . . . . . .
11
CONTENTS
5.1.2
5.2
6
Circular Cylinder .......
.............................
Buried O bject . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
97
5.2.1
Random Medium Scattering . . . . . . . . . . . . . . . . . . . . . . .
102
5.2.2
Object in Random Media . . . . . . . . . . . . . . . . . . . . . . . .
110
Conclusions and Future Work
125
12
CONTENTS
List of Figures
2-1
The Yee Lattice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
2-2
Numerical Phase Velocity vs. Propagation Angle, Isotropic Case
. . . . . .
29
2-3
Two-Dimensional Total/Scattered Box . . . . . . . . . . . . . . . . . . . . .
31
2-4
Typical Modulated Gaussian Pulse Incident Field . . . . . . . . . . . . . . .
32
2-5
TE Field Incident on a Two Layer Medium
. . . . . . . . . . . . . . . . . .
33
2-6
Total/Scattered Field Error Due to Numerical Dispersion
. . . . . . . . . .
39
2-7
Reflection Error of PML and Stretched Coordinate PML ABCs . . . . . . .
48
2-8
RCS of a Buried J, source . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
2-9
RCS of a Buried J. source . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
. . . . . . . . . . . . . . . . . . . . . . . . . .
54
. . . . . . . . . . .
56
2-10 RCS of a Plate in Free Space
2-11 Quarter of a Cylinder Cross Section in the FDTD Grid
2-12 Monostatic RCS and Bistatic RCS of a Cylinder Using Conformal Mapping,
Cylinder Diameter = 2/5A, Length = 2A . . . . . . . . . . . . . . . . . . . .
57
3-1
H and E fields around the discrete FDTD Boundary
. . . . . . . . . . . . .
68
3-2
Computational Domain for Discrete Formulation Testing . . . . . . . . . . .
72
3-3
TE and TM Numerical Dispersion Error,O = 00 Incidence
73
3-4
TE and TM Numerical Dispersion Error, 0 = 00 Incidence, Optimized For-
. . . . . . . . . .
m ulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
00 Incidence . . . . . . . . . . . . . . .
74
00 Incidence . . . . . . . . . . . . . . .
75
3-5
TE Numerical Dispersion Error, 0
3-6
TM Numerical Dispersion Error, 9
=
13
LIST OF FIGURES
14
3-7
TE Numerical Dispersion Error, 9 = 450 Incidence
3-8
TE Numerical Dispersion Error, 9 = 450 Incidence, Optimized Formulation
76
3-9
TE Numerical Dispersion Error, 9 = 450 Incidence
. . . . . . . . . . . . . .
76
3-10 TM Numerical Dispersion Error, 9 = 450 Incidence . . . . . . . . . . . . . .
77
3-11 TM Numerical Dispersion Error, 9 = 450 Incidence, Optimized Formulation
78
3-12 TM Numerical Dispersion Error, 9 = 450 Incidence . . . . . . . . . . . . . .
78
yQ-
..............
75
2 Plane Cross-Section, l = 25 cells, l = 25 cells
87
2 Plane Cross-Section, l = 5 cells, l = 5 cells . .
87
Random Media, , -
Q Plane
Cross-Section, l, = 25 cells . . . . . . . .
88
4-4
Random Media, i -
Q Plane
Cross-Section, l, = 5 cells . . . . . . . . .
88
4-5
Mean and Variance of Random Media Realizations . . . . . . . . . . .
89
5-1
Complete Problem Geometry
5-2
All possible scattered field contributions.
4-1
Random Media,
4-2
Random Media,
4-3
. . . . . . . . . . . . . . . .
included in the simulation results.
. . . . . . . . . .
92
Contributions 1 and 2 are not
. . . . . . . . . . . . . . . . . . . . . . .
93
5-3
FDTD and MoM RCS Comparison . . . . . . . . . . . . . . . . . . . . . . .
94
5-4
Monostatic RCS of Cube below Anisotropic Slab . . . . . . . . . . . . . . .
95
5-5
Bistatic RCS of Cube below Anisotropic Slab . . . . . . . . . . . . . . . . .
96
5-6
Monostatic RCS of Cylinder below Anisotropic Slab
. . . . . . . . . . . . .
97
5-7
Bistatic RCS of Cylinder below Anisotropic Slab
. . . . . . . . . . . . . . .
98
5-8
Buried Object Problem Geometry
. . . . . . . . . . . . . . . . . . . . . . .
100
5-9
All possible scattered field contributions. Contribution 1 is not included in
the simulation results. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-10 Random Media in the FDTD Computational Domain, J -
Q plane
101
. . . . . .
102
5-11 Random Media in the FDTD Computational Domain, 9 - 2 plane . . . . . .
103
5-12 Random Media Bistatic RCS, HH Incidence, J = 0.25E . . . . . . . . . . . .
105
5-13 Random Media Bistatic RCS, VV Incidence, 6 = 0.25E . . . . . . . . . . . .
106
5-14 Random Media Bistatic RCS, HH Incidence, 6 = 0.1E . . . . . . . . . . . . .
107
LIST OF FIGURES
15
5-15 Random Media Bistatic RCS, VV Incidence, J = 0.1f . . . . . . . . . . . . .
108
. . . . . . . . . . . . . . . . . . . . . . . .
109
5-16 Random Media Monostatic RCS
5-17 Random Media Bistatic RCS, 6 = 0.25u, l = l1 = 30A.
. . . . . . . . . . .
5-18 Random Media Monostatic RCS, 6 = 0.25u, lP = 1, = 30A.
. . . . . . . . .
111
112
5-19 Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 00 incident angle, 1, = l = 10A and 6 = 0.1E. Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. . . . . . . . . . . . . . . . . . .
116
5-20 Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 0' incident angle, 1, = l, = 10A and 6 =
.e.
Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. . . . . . . . . . . . . . . . . . .
117
5-21 Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 0' incident angle, l, = l = 30A and 6 = 0.LE. Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. . . . . . . . . . . . . . . . . . .
118
5-22 Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 0' incident angle, 1, = l = 30A and 6 = 0.le. Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. . . . . . . . . . . . . . . . . . .
119
5-23 Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 00 incident angle, 1, = l = 30A and 6 = 0.1c. Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. No object is present . . . . . .
120
5-24 Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 0' incident angle, l = lz = 30A and 6 = 0.1L.
Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. No object is present . . . . . .
121
16
LIST OF FIGURES
5-25 Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 0' incident angle, 1, = 1, = 30A and 6 = 0.25c. Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. . . . . . . . . . . . . . . . . . .
122
5-26 Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 0' incident angle, 1, = 1, = 30A and 6 = 0.25c. Coherent and Incoherent
averaging for co-polarized and cross-polarized waves, including convergence
of coherent average for three bistatic angles. . . . . . . . . . . . . . . . . . .
123
List of Tables
4.1
Effective Permittivity from Strong Fluctuation Theory . . . . . . . . . . . .
84
5.1
Permittivity and conductivity mean, for given random medium statistics . .
103
5.2
Permittivity and conductivity variance, for given random medium statistics
103
17
18
LIST OF TABLES
Chapter 1
Introduction
Electromagnetic wave propagation through random media is a topic of great interest in
fields such as remote sensing [1] and communications [2]. Geophysical media such as the
atmosphere, snow, vegetation, and soil are complex inhomogeneous material that cannot be
described in a deterministic manner, so a statistical model must be employed instead [3].
These statistical models, known as random medium models, describe a medium as an effective or mean permittivity (or permeability) with random fluctuations that are generated
from a prescribed correlation function. A single realization or ensemble of random media
with correlation functions chosen to describe the material of interest are used to study the
statistical properties of the scattered and transmitted fields. Random medium models are
crucial because most natural media are rarely homogeneous, containing discrete scatterers
or fluctuating material properties whose characteristics are known only in a general sense
(size, orientation, etc).
Understanding the wave attenuation, scattering, and phase fluc-
tuations introduced by these random media is critical to remote sensing system design [4]
and characterization of communications links.
In particular, predictions of radar return
from objects obscured by foliage [5] or buried under snow or grass [6] are dependent on
knowledge of the effects of these geophysical media. Soil, for example, may contain fluctuations in density, material, and moisture, which may affect ground penetrating radar (GPR)
applications. In addition, because the purpose of GPR is to detect buried objects, the soil
19
CHAPTER 1.
20
INTRODUCTION
between the target and the surface has been previously excavated, and as such will not
have a stratified or homogeneous profile. Foliage is another example which can be modeled
of as a medium containing scatterers (leaves, branches) at random positions with random
orientations. In soil, foliage, and other media, these inhomogeneities may be described in a
statistical manner, similar to studies of random rough surfaces.
In this research, a three-dimensional FDTD simulation [7, 8] is presented which models
the scattered field and radar cross section (RCS) of an object in or beneath a layer of
random medium.
1.1
Motivation
The electromagnetic scattering of objects below random media will be modeled in this
research. Various types of objects under different models of random media will be studied to
capture scattered field information (i.e. RCS). This data will help predict radar penetration
of tree foliage as well as the probability of detection for buried objects in GPR applications.
Synthetic aperture radar (SAR), for example, is a coherent process which constructs an
image of a target based on phase and attenuation information. When the target is obscured
by a random medium, the scattering characteristics of the medium will deteriorate the
quality of the reconstructed SAR image. Simulation of the phase fluctuation and attenuation
characteristics of the random medium can be used to estimate the effect that medium would
have on radar processes. In addition, the results could be used to determine if radar signal
processing algorithms could be used to reduce the distortion caused by random media. For
example, it is important to model the target response of an object under foliage in order to
determine the ability of airborne SAR to resolve a target such as a vehicle under a forest
canopy. The objective of GPR studies is usually to determine the probability of detection for
a buried object, and so it is important to understand how the random medium contributes
to the attenuation and scattering of the incident field. These results could also be used to
determine the effects of the inhomogeneous ground on SAR image reconstruction for buried
objects [9].
1.2. PAST WORK AND RESEARCH DESCRIPTION
1.2
21
Past Work and Research Description
Numerous studies have appeared in literature in recent years focusing on modeling GPR
[10, 11]. Initial studies concentrated on approximate analytical techniques [12], whereas recently there has been a great deal of work on numerical analysis such as Method of Moments
[13] and Finite-Difference Time-Domain (FDTD) [14, 15]. The FDTD technique has been
gaining popularity in these studies due to its capability to model complex geometries with
relative ease. The treatment of the background soil in GPR applications has been evolving
in complexity, from the simple homogeneous dielectric slabs [12] to lossy, dispersive media
with discrete particles [16] and random rough surfaces [17]. Work has also been done [18]
that models the soil around the target as a random medium, but this work was restricted
to discrete scatterers (random placement).
This work will focus on an objects buried in
continuous random media with spatially fluctuating permittivity and conductivity. Currently, there is no experimental data showing the types of fluctuations that may exist in soil
permittivity, although studies show that soil parameters are highly sensitive to moisture
[19] and geophysical material [15], so it is important to consider the material fluctuations.
Foliage penetration experiments and theoretical studies have also been published recently,
mainly with airborne [20, 21] or land (boom) [22] synthetic aperture radar. Theoretical
treatment of the foliage canopy has been similar to that of the soil in GPR simulations,
varying in complexity from the dielectric slab model [23] to discrete scatters consisting of
fractal-generated trees [24]. Fxt'ensive work has been done using analytical techniques to
model the foliage with the continuous random medium model [5], but few numerical simulations (in particular, FDTD) have been performed. In this study, the phase fluctuations
caused by foliage will not be addressed, and instead the medium will be modeled as an
effective permittivity. (The phase fluctuations caused by vegetation are usually very small,
due to the small size of the scatterers (on the order of A/50).). The effective permittivity
takes into account the scattering loss and absorption of the random medium to yield the
mean scattered field. For the case of the soil (spatially varying random medium), the phase
fluctuations for are much larger (i.e., correlation lengths on the order of a wavelength), and
CHAPTER 1.
22
INTRODUCTION
will be examined. The scattered field characteristics for the buried object problem will be
studied for one random medium realization with varying parameters and an ensemble of
random media with fixed parameters (Monte Carlo simulations).
1.3
Outline of the Thesis
The thesis is divided into 6 chapters. Chapter 1 contains the background, motivation and
the description of the research. Chapter 2 introduces the formulation of FDTD method,
and presents the simulation model. In Chapter 3, the problem of large errors caused by
numerical dispersion is addressed. Chapter 4 presents the random medium models that will
be used to simulate the geophysical media. Chapter 5 presents the results and analysis of
scattering from an object in or below both random medium models, in this case for foliage
and theoretical models for soil. Chapter 6 concludes the thesis and provides a description
of possible future work.
Chapter 2
The Simulation Model
2.1
Introduction
The Finite-Difference Time-Domain Technique (FDTD) is one of the most popular numerical methods of modeling electromagnetic wave propagation and scattering.
FDTD
techniques use central-differencing to solve Maxwell's equations at discrete locations over
a specified volume of space in the time-domain. This approach allows one to study highly
complex systems with relative ease, but can require huge amounts of memory and CPU
time to solve the enormous amounts of unknowns. Although originally formulated by Yee
[8] in 1966, relatively little research was devoted to it until the late 1980's, when computer
technology had matured to the point where FDTD simulations became feasible. Since then,
FDTD publications have been increasing at an exponential rate, as CPU time and memory
costs become cheaper, allowing larger and more accurate simulations. Research has advanced FDTD to the point where it can handle dispersive, non-linear, and complex media
with embedded arbitrary objects. With the advent of Berenger's Perfectly Matched Layer
(PML), and its subsequent improvements, FDTD absorbing boundary conditions (ABCs)
can terminate media in the computational domain with reflections of less than -40 dB. With
these considerations in mind, the FDTD technique has become a very attractive choice as
a simulation model to examine the scattering of objects under random media.
23
24
CHAPTER 2. THE SIMULATION MODEL
2.2
The Basic Finite-Difference Time-Domain Method
The FDTD method solves Maxwell's equations for every point in time and space on a cubic
lattice. The technique presented here is the original Yee lattice in Cartesian coordinates.
We begin by writing down Maxwell's equations in differential form,
a
atB
_9
(2.1)
V xE
=
V xH
=
-D +J
at
(2.2)
V-D
=
p
(2.3)
V*-
=
0
(2.4)
and the constitutive equations,
(2.5)
(2.6)
The permittivity tensor, c, will be defined here for uniaxial anisotropic media, and all
subsequent formulations will use this tensor. The permeability = will be the isotropic free
space value, pu.
This type of medium is chosen to satisfy the requirements of the random
medium models, which are discussed in Chapter 4. The uniaxial permittivity tensor is given
by
CXX + 1CX
0
0
0
Y
0
0
0
Ezz + W
(2.7)
2.2. THE BASIC FINITE-DIFFERENCETIME-DOMAIN METHOD
25
and we have, in terms of components,
DHl
-
at
aHY_
at
DHz
at
DEat
p1[_ oz_
ay
DEy 1(2.10)
_
ax
Dy
1
0DHZ
E
Dy
-
Dz
-
_
=- 1
ey
-
DHa
[HY
Ezz
(2.9)
z
1 [DEx
P
(2.8)
aEx
_
p4 D9x
_
at
a
a~z
1 DEz
at
DIEx
1[DEY
Dx
- UXXExI
(2.11)
-l DH
x
uoyyE]
(2.12)
D
-zzEz
(2.13)
Dz
y
-
(2.14)
Following Yee's notation, a discretized point in time and Cartesian space is defined as:
(i, j, k, t) = (iAx, jAy, kAz, nAt)
(2.15)
where i, j,and k represent coordinates in space, and n represents the time step. Ax, AY,
and Az are the spatial increments in the s,,
, and 2 directions, respectively. At is the time
increment. The spatial derivative in x can then be expressed using central differencing as:
Du
0- (iAx, jAy, kAz, nAt) =
_Ui+
and similarly for -
and -.
n
n
jk
-U
AX
i
-i1
2
k+O[A)](.6
_
A
2]
(2.16)
The temporal derivative is described by:
1
2
(i*x, jAy, kAz, nAt) = Uk'
'
at'
At
Ujik +
O[(At) 2]
(2.17)
Maxwell's equations then become a set of finite-difference equations in space and time,
which can be time-stepped as follows:
26
CH APT ER 2. THE SIMULATION MODEL
H"
2
Ax(i,j+
2
At
y 2
E"-E"(+1k
x(i+1j,k+l)
A-EEE
At
n-
2I
=CL~(ij,k)
x(i+±I ,j,k)
Ax
S+E2(i,+,k)
y(i,j+.I,k)
=
-
En+l
z(i,j,k+}!)
- CE1(ij,k)
_
E"
z(i+l,jk+i)
-E"
z(i,j,k+i)
Ax
-EE
x(i+.I,j,k)
x(i+.! j+lk)
Ay
2
HT
z(i+.I,j-I,k)
Hy(i+.,j,k+)
HY(+ I,j,k+.!)
Az
y
C"L(ijEk)E
-E1(i,j,k) X(i,j
E2(iyj,k)
2Z
x(i+.Ijk)
-CZ(i+li±1k)
En+1
yi j+.! k)
yi+l,j+ 1,k)
z(i+.I,j+.!,k)
(i,j2,k)
En+1l
z(i+i! i k)
21
1
=
y(i,j+-Ik
Ay
H2+2
H
Ey(ij+i,k+l)
Ez(i,j+1,k+}) - Ez(i,j,k+!)
=nH =H~2
x(ij+i,k+ )
-,k+i.)
22
21k
H x(i,j+',k-
Cyij+-,k+i)
)
Z(+j+k)Z(
-ij±,k)
E(ij k+1)
H"
-y(i+1,jk+1)
-
2
Ax
2(ij,k)
H"
H+l+
Hx(i,j+.i,k+. ) -Hn+i
x(i,j--
2
y(i--I,j,k+i)
,k+ !)
Ay28
where
CcE1(ij,k)
[1 -
At
Ec,(i
,j,k)]
[1+0crc ~,k)At1
6(((i,j,k)
Ate
CC
E2(i,j,k)
1+
CC(i,j,k)At1
2,,C(i,j,k)
(2.19)
*1
2.2. THE BASIC FINITE-DIFFERENCETIME-DOMAIN METHOD
27
z
(i,j,k+1)
71"000.
H,
Ex
tl
H~H
(ij+1k)
Ey
-
Y
(i+1 ,j,k)
X
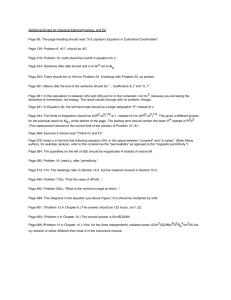
Figure 2-1: The Yee Lattice
and is a second-order accurate scheme both in space and time. In the constants, ( refers to
x, y, or z. In this form, the field values are placed on the rectangular three dimensional Yee
lattice, which represents the space, or computational domain, over which they will be solved.
The Yee lattice is illustrated in Figure 2-1, with the field components shown for coordinate
(i, j, k). The
E fields
lie on the edges of the lattice, and the
the faces, staggered a half-cell from the E fields. The
and the
H fields
E
H fields
are perpendicular to
fields are solved at time step n,
are solved at time step n + -. Marching in time is then carried out on
E
and H in a leap-frog scheme that propagates the fields through the computational domain.
2.2.1
Dielectric Interfaces
Material interfaces must be handled carefully in the FDTD model as one would handle
electromagnetic boundary conditions. Placing the
allows for tangential
E
E fields on the edges of the FDTD cube
field conditions to be enforced. For example, creating a Cartesian
perfect electric conductor (PEC) simply requires forcing all E field values to zero on the
PEC cubes. When an
E
field lies at the junction of two or more materials, the e at the
CHAPTER 2. THE SIMULATION MODEL
28
interface is chosen to be the average of the e in the adjacent cells. The H fields are handled
differently, by splitting them up into two parts, the tip and the tail. Doing this allows each
H part to be computed with the material properties within which it lies. When the E field
update equation requires the H fields, the average between tip and tail is taken.
2.2.2
Stability Criteria
The central-differencing approximation requires certain bounds on the time-step with respect to the lattice space increments. The condition of stability for the FDTD simulation,
derived in [7], is given by the Courant condition,
1
1(2.20)
At <
This stability criteria ensures that w remains real for all possible k, so that all eigenmodes
eikx,y,zeiWt remain bounded after discretization.
2.2.3
Numerical Dispersion
The FDTD grid is an approximation of continuous space, based on central differencing,
and only solves Maxwell's equations to O(A 2 ). Therefore, the smaller the grid spacing, the
more accurate the FDTD solution will be. The inaccuracy of the FDTD scheme results in
numerical dispersion, which is a fundamental concern because it accumulates with propagation distance. Ultimately, a trade-off is made when implementing the FDTD technique,
between desired simulation size (limited by computational resources) and desired accuracy.
It is important to quantify the effects of numerical dispersion to understand its impact
on the FDTD solution. For the isotropic case, the dispersion relation in discrete calculus
becomes [7]:
[1
sin wAt 2
cat
2
.
Asin
A(
k_
)
2
2 +
1 sin
AY
Y2
k
2
1 sin (kzAz
AZ
2
2
(2.21)
2.3. THE TOTAL/SCATTERED FIELD FORMULATION
... .
0.99..
0.98
-
0 .95
-
29
-
-.
- -
.--- .
.-- .--- - - -- .-
--.-.
-
- -
Delta= )J5
Delta = M 0
----Delta = V20
Propagation Angle
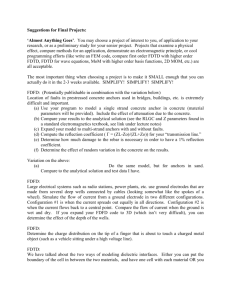
Figure 2-2: Numerical Phase Velocity vs. Propagation Angle, Isotropic Case
Note that as At -+ 0 and A,,,Z -+ 0 then Equation 2.21 becomes the continuous dispersion relation. Figure 2-2 shows the error in the phase velocity caused by the discretization
for various cell sizes. To minimize such error, a cell size of about A/20 is usually chosen.
We can see that the FDTD domain is actually an anisotropic medium, where a wave propagates faster in the diagonal directions than along the grid axes. For any simulation, we
must examine the worst case error in the directions of the grid axes to determine what cell
size to pick.
A more detailed analysis of numerical dispersion will be presented in Chapter 3, along
with the field derivations using discrete calculus.
2.3
The Total/Scattered Field Formulation
The introduction of electromagnetic excitation into the FDTD grid can be done in different
ways. Antennas can be modeled directly in the grid, or dipoles can be approximated as
fields impressed at a single field point. However, if a plane wave excitation is required, it is
necessary to use a different scheme, such as the classic total/scattered field formulation
[71.
CHAPTER 2. THE SIMULATION MODEL
30
The total/scattered field formulation is based on Huygens' principle and requires that the
computational domain be split up into two regions, the total field region and the scattered
field region. We define these fields as:
tot
tot
~
~
inc -+Escat
inc
+ Hscat
(2.22)
Huygens' principle states that the fields inside a given volume can be completely determined
by the tangential fields specified over a surface enclosing the volume. This allows a source
to be replaced by a closed surface, which simplifies the solutions of the fields in the region
of interest exterior to the volume. Conversely, the fields outside a given volume can also
be determined by the tangential fields over a surface surrounding that volume, so that the
region of interest may be the interior of the volume. This is the basis of the total/scattered
field formulation, and we choose the surface to be the boundary separating the total and
scattered field regions. If the analytic solution of the plane wave (or any wave) is known
over this surface, we can impress magnetic and electric current sheets upon it using the
equivalence principle such that the incident field propagates inside the volume (total field)
but not outside. The volume will henceforth be referred to as the T/S box. Scattering
objects must be placed inside the total field region, so that they interact with the incident
field. The scattered fields then may leave the T/S box to enter the scattered field region. If
there are no objects within the total field domain, then the scattered fields outside the T/S
box are zero. This formulation not only allows the finite computational domain to propagate
an incident field of infinite extent, but also isolates the scattered field from the incident field
for measurement purposes (for example, a far-field transformation). An alternative method
is the scattered field formulation, which impresses the incident field directly on the scatterer,
effectively shrinking the total field domain down to the size of the scatterer. Although this
results in a smaller numerical error in the incident field, it is often difficult to impress the
2.3. THE TOTAL/SCATTERED FIELD FORMULATION
1 ++1/2
0I 14-*-4--t-----
--
4
o
31
I 6-t
- 1/2 t -- +
---
- -
eTotal
Field Domain
4-
-o- -o-
----
*
-
j
9
-o - -o
--
T/S Box
z Hy
-
Scattered Field Domain
-
Hx
Figure 2-3: Two-Dimensional Total/Scattered Box
currents on non-Cartesian objects or multiple scatterers. In the problems posed here, with
random media that scatter the incident field, it is necessary to use the total/scattered field
formulation.
2.3.1
Problem Formulation
Placement of the current sheets on the T/S box can be done by equivalently adding or
subtracting the electric and magnetic incident fields at the coordinates of the surface. The
total field region is created within the T/S box by adding the incident field onto the lattice
at the T/S box surface. The scattered field region is created by subtracting the incident
field from the total field as it leaves the T/S box.
Figure 2-3 shows the FDTD geometry that would be used to create a 2-D T/S box, with
E2, H, and Hy fields. The T/S box is indicated as the dashed line, and is defined at io
to i1 and jo to ji. In this case, the Ez incident field is introduced and subtracted from the
total field on the box itself, whereas the H_ and Hy fields are adjusted one half cell around
the T/S box.
CHAPTER 2. THE SIMULATION MODEL
32
ss
a
F
IHz1
1
W
16W
2M3
Figure 2-4: Typical Modulated Gaussian Pulse Incident Field
2.3.2
Excitation
Figure 2-4 shows a typical time domain and frequency domain Gaussian pulse that is used
as the incident field. Care must be taken to ensure that the pulse has zero DC component,
and a bandwidth that falls within the numerical dispersion guidelines. A typical grid cell
size that would be used for this pulse is 0.02 m, which corresponds to A/30 for the center
frequency and A/20 for the highest (20 dB down from the center) frequency component.
2.3.3
Incident Field Solution
We now need to find the analytic field solutions for the incident field over the total/scattered
field surface. In free space, the solution would be trivial, but in this case the effects of the
anisotropic medium as well as the layer interfaces must be taken into account. The FDTD
total/scattered field formulation for a layered medium was first put forth in [253, but we
will follow the more conventional notation described in [26], with the domain illustrated in
Figure 2-5 (<0
0 plane).
TE Incidence
For TE incidence, given that the wave has a plane of incidence parallel to the i
we define in general the
E fields
in a layer
I of a layered medium as:
-
2 plane,
2.3. THE TOTAL/SCATTERED FIELD FORMULATION
33
z
Ej
I0
E3,03
l
ITotal Field
-- - . . .
.- - . - .
. -.
-J
Scattered Field
Figure 2-5: TE Field Incident on a Two Layer Medium
Ely
Hix
HIZ
=
(Aieiklzz
+ Bie-ikiz ) eikxx
kiz (Aieiklzz
=
- Ble-iklzz
(2.23)
eikxx
(2.24)
( Aleikzz + Bie-ikzz eikx
k
(2.25)
WIp
where the field incident on the layered medium is E, = Ee-ikzz+ikx, and we know k. = klx
from phase matching. From kDB analysis [26], we know that a TE wave passes through a
uniaxial medium as an ordinary wave; i.e. it does not see the anisotropy. As a result, the
dispersion relation for layer 1 is simply:
k 2+k
= W
2
where ct was defined in the previous section as the transverse permittivity. kx
and klz
=
(2.26)
IEti
=
k sin 0 0
k cos 01, where 01 is found using Snell's Law. The angle 0 is the incident field
angle, and 01 is the transmitted field angle in layer 1. To solve for the wave amplitudes Al
CHAPTER 2. THE SIMULATION MODEL
34
and B 1 , we need to examine the boundary conditions at the interfaces, where the tangential
components Hi_ and Ely are continuous, i.e.,
Aieiklz
+
Bie-ikz = Al+1eik,1)zz
+
Bl+leik(1+1)zz
(2.27)
and
kiz (Aleiklzz - Bie-ikzz
z+1
_
IL11+1
Yll
+1)z)
(Al+1eik' il+1z - B jl+eik
(2.28)
For a single interface at z = 0, where Ao = R, Bo = 1, A 1 = 0, and B 1 = T, we obtain
from equations 2.27 and 2.28,
R+1
koz(R-1)
Yo
[1
(2.29)
which can be solved as
1 - pol
1+ poi
2
1+ pol
(2.30)
where
P0=
kiz
/-ikoz
(2.31)
For a two layer medium (two interfaces), we redefine our wave amplitude coefficients as:
Ao
=
A1 =
A
2
=
Ro
Bo =
1
R1 T1
,
B1
=
T1
0
,
B2
=
T2
(2.32)
2.3. THE TOTAL/SCATTERED FIELD FORMULATION
35
The transmission and reflection coefficients for a single layer medium can be applied
here to find R 1 as:
R1
R12 ei 2 klzz
=
_
1 - P12 ei 2 kizz
(2.33)
1 +P12
To solve for Ro, we solve 2.27 and 2.28 for A, and B 1 as follows:
Aie-iklzdl
Bleiklzdi
=20
= 2
+
+
P1(1+1)) (Ai+1e ik1'z'
1 + P1(1+1))
Rl(l+l)Bl+leik(+1)zz
(Rl(l+)Al+1eik1+1)zz
+
Bl+1e-ik(1+1)zZ
(2.34)
where:
Pl(1+1)
ylk(1+1)z
y1+1kiz
1 - P1(1+1)
1+ Pl(+1)
(2.35)
Using the relations:
1
P1(1+ 1)
(2.36)
combined with equations 2.34, we obtain A 1/B in terms of Al+I/B1+1:
Al
Bi
2
ei klzdl
Rl(,+1)
1
] ei2(k(,+ 1 z)+kli)di
(2.37)
ei2k
,zdl
+
(11
In this case, we are interested in obtaining Ro = Ao/Bo, which is expressed in equation 2.37
CHAPTER 2. THE SIMULATION MODEL
36
in terms of A1/B
1
(= R1), previously determined in equation 2.33. The equation for Ro is
then
Ro =
i2kozdo
Rol
(
+
[
ei2(klz+koz)do
1
-
ei2kizd,
(2.38)
+ Ri2 ei2klzdl
or
-
Rol +
1
R1 2 ei2kl2(dl-do)
RojR12 ei2klz(di-do)
+
.
(2.39)
To find the transmission coefficients, defined as T = B 1/Bo, we will use forward propagating transmission matrices. The first step is to solve equations 2.27 and 2.28 in terms of
A1+1 and B~l:
Al+1
-ik(+1)zdl
Bj+1eik(u+l)zdl
=
(1 + P(+1)I) (Aie-ikzz + R(l+1)lBleiklz
=
(1 + P(1+1)l) (R(l+1)lAeiklzz + Beiklz
(2.40)
Expressing equations 2.40 in matrix form results in:
A eiklzdl
Alleik(1+1)zdl+
Bl+1eik(1+1)zdi+1
J
(
Bieikzdj
(2.41)
J
where:
=R(Ie-ik(+1)z(d+1-di)
V(1+1), =2 (1 + P(1+1)1) (R11l
k,
R(k+1
)zd l-)
e i(L+l)z (dl+l
(2.42)
d)
is the forward propagating matrix. As an example, a special case that requires a simpler
formulation is the half space case, where A 1 = 0 (no upward propagating wave in region 1).
Equation 2.41 in this case can be written as:
Bo
T
Ro-ikoedo
1
_)=
=
-
(
(2.43)
eikozdo
2.3. THE TOTAL/SCATTERED FIELD FORMULATION
37
where:
Rioe ikizdi
1 +Pik)zd1
U et= - (1 + Poir)
2
(2.44)
eik12di
(R10e-ikjzdj
Using equations 2.43 and 2.44, we can first solve for Ti:
(IT1
=12
(e-iki(di-do)
R10eik1.(d1-do)
R1oe-ikiz(d--do)
Roe-ikodo
eikiz (di -do)
eikozdo
(2.45)
where Ro is given by equation 2.39. This results in:
2 eikozdo+ikz
(di -do)
1
1 + RolRi 2 e i2klz (di
(1 + po1)
do)
(2.46)
The propagation matrices can be used to express the amplitude coefficients of layer 2 in
terms of layers 1 and 0. In this case:
0
=
=0
Roe-ikodo
(2.47)
Reikodo
T2
resulting in:
(02
1
2 (
-ik
1 (d1 -do)
(R1eikiz(di-do)
eik2zd2
R 2 1eik2zd2
R 2 1e-ik2d2
e-ik2zd2
Rioe-ik1
Roe-ikodo
(d1 -do)
)(
eik1,(di-do)
eikozdo
(2.48)
which simplifies to:
4 ei(kzdo+kiz(di-do)-k2zd1
)
(1 + P12) (1 + PO1) (1 + RolRl 2 ei2kiz(di-do))
(2.49)
We now have the analytic solutions to the incident TE field everywhere in the computational domain. To use these fields in the FDTD method, they must be expressed in the
time domain. This can be done by calculating the transmitted and reflected fields directly
with equations 2.23, 2.24, and 2.25, as well as the Fourier Transform of the incident field
CHAPTER 2. THE SIMULATION MODEL
38
(Gaussian pulse incident on the layers). Once this is done, Fast Fourier Transforms [27]
are used to transform the field quantities back into the time domain for placement on the
FDTD grid.
TM Case
The TM fields are defined in the computational domain as
H
=
E
=
kt (A
W Et'
E
=
(2.50)
+ Bie-ikzz) eikxx
(Aleiklzz
- Bie-iklzz) eikxx
l e iklzz
kx- (Aie ikzz + Bie-iklzz) eikxx
(2.51)
(2.52)
We will not derive the TM field amplitudes here, as they can be easily found from the
TE fields by duality. However, again from kDB analysis [26], we find that the TM waves
propagate through uniaxial media as extraordinary waves. This results in a new k vector
defined as
ki =2(2.53)
Etl
COS (01)2 +
1sin(01)2
O~
EZI
and the dispersion relation is
W2 picti =
+ kx (E)
(2.54)
\ Ezil/
where kx
=
kl sin (0)
and klz = kl cos (01). The angles Oo and 01 again define the incident
angle in layer 0 (first layer) and layer 1, respectively. The angles can be determined from
Snell's law as
cos (91)
1
=
yPco sin 90 2
Pictl (-
poo; sin (0)
+2
2.3. THE TOTAL/SCATTERED FIELD FORMULATION
-15
39
-r----r-----
-20
-25
-30
- --
-35 -
-40
0.0
1
0.02
0.03
0.04
0.05
0.06
Cell Size 1XJ
--
0.07
6Ox6Ox OA
8xx80 A
0.05
0.09
C.1
Figure 2-6: Total/Scattered Field Error Due to Numerical Dispersion
p/oE
sin (01)
sin 9)2
=
Al Eti
po sin
o
1-pE0 sin(00) 2
+0
PAEzI
(2.55)
2.3.4
Numerical Experiments
We are interested in quantifying the error due to numerical dispersion in the total/scattered
field formulation. By introducing and removing the analytic field from the T/S box, the
error that accumulates as the field propagates through the total field domain is ignored.
This field error results in some of the incident field escaping into the scattered field domain
and adding noise into the scattered field measurements. The best case error is shown here
as the maximum scattered field error from an incident field propagating at 6 = 45 degrees.
Various T/S box sizes are examined by plotting scattered field error versus the size of
the spatial discretization.
The error is between -20 and -25 dB for the standard cell
40
CHAPTER 2. THE SIMULATION MODEL
discretization size of A/20 for volumes on the order of what will be studied in subsequent
sections. This error is much larger when the field propagates along the Cartesian axes, and
the problem will be addressed in Chapter 3.
2.4
Perfectly Matched Layer
The FDTD lattice must be truncated with an absorbing boundary condition (ABC) so that
the scattered fields do not reflect back into the computational domain. Several ABC's have
been developed, but the most popular by far is the material ABC developed by Berenger [28]
who named it the Perfectly Matched Layer (PML). The original PML worked by creating
an attenuating layer surrounding and matched to the computational domain. The fields
that enter this medium do so with almost no reflections, and then attenuate through the
two way trip in and out (reflecting off the PML termination). The fields that re-enter the
computational domain are made exponentially small.
2.4.1
The Berenger PML
To ensure that the PML is matched to the computational domain, Berenger proposed that
both domains have the same permittivity and permeability and:
ae
(2.56)
E
where o"' and ae are the artificial magnetic and electric conductivities, respectively, inside
the PML. Furthermore, Berenger proposed to split each field component into two subcomponents. For example, in a 2D TE problem,
1EE
/10
yo
eE
aEx
eE
at
YX
zx+MH
X
at
-8(HZX + HZY)
a(Hzx + Hzy)
-8_Ey
Ox
2.4. PERFECTLY MATCHED LAYER
41
-OE~
_H__
A
l
+tx'Hzz
Ox
=
OH
HZY +
aEx
EHZy
(2.57)
where HZ = Hzx + Hzy.
The loss o- for example, is a PML parameter that attenuates
y
direction, in this case Ex and Hzx. This formulation allows the
waves traveling in the
PML to attenuate waves traveling in all directions, and also to absorb waves with almost
no reflection at all angles of incidence. To maximize the loss of the PML and minimize
reflections due to discretization, Berenger proposed using a tapered profile for the artificial
conductivities of the form:
0-(p) =
(2.58)
-max
where p is the normal coordinate variable (p
=
0 at the interface), n is 2 (for a parabolic
profile), and d is the thickness of the PML. The reflection coefficient of the PML can then
be calculated as:
R(0)
=
e-2
R(O)
=
e
o(p)cosOdp
-2amax
6
cos 0
(n+1)oc
(2.59)
Although waves still do reflect off a PML for grazing angles of incidence, they are then
absorbed by spatially perpendicular PML layers. Berenger proposed choosing the value of
-max as:
-( n + 1) In R(0)
o max =(.0
(2.60)
The extension of the PML to the three-dimensional case is straightforward. The original
Berenger's PML cannot, however, match to lossy media, as the matching condition in
Equation 2.56 can no longer be satisfied. The PML also cannot absorb evanescent waves.
To extend the PML to these cases, we will use the stretched coordinate formulation put
CHAPTER 2. THE SIMULATION MODEL
42
forth by Chew in [29].
2.4.2
Stretched Coordinates
In [30], it was shown that the PML is equivalent to an analytic continuation of the frequency
domain Maxwell's equations to complex space. Approaching the PML from this perspective
allows it to be implemented with any type of medium (lossy, bianistropic, dispersive, etc.).
In Cartesian coordinates, this is achieved by complex coordinate stretching [29], which map
the coordinates as follows:
=+
jsg(')dC' =
+i
ac'
d('
(2.61)
where ( indicates x, y, or z. The variables a( > 1 and oC
0 are used to match the PML
to the medium in the computational domain. The coordinate stretching is implemented in
the PML formulation as modified nabla operators:
=
i--+y
sX ax
--
+z-
sy ay
sz az
(2.62)
All waves entering the PML are then mapped to an exponentially decaying factor, for
example:
e-ik(w)C - e-ik(w)bze-k(w)A~w
(2.63)
So all fields are attenuated, including evanescent waves, regardless of the material parameters, and without reflection. The stretched coordinates can now be used to match the PML
to a lossy medium.
2.4. PERFECTLY MATCHED LAYER
2.4.3
43
PML Implementation
The PML implementation shown here is similar to the notation of [31], with a few logical adjustments (for example, the stretching coordinates should be material independent).
Maxwell's equations are now written as:
xE
7 x
iwpi
=
I
=E=w.E
(2.64)
where p = yo and = is the permittivity tensor defined in Equation 2.7.
We define the
stretching coordinate as:
sC()
=
sco() [1 +
(2.65)
]
We will define the u components of the uniaxial permittivity tensor with xx, yy, and zz
subscripts, while the PML artificial conductivity
the split
E field
- will use the x, y, and z subscripts. For
components, Maxwell's equations then become:
1 0
108
1aHy =
Hz
sz az
sy Dy
1 0 x 108
1aHz
=
(-z
Hz
108
1 a
-iU
-2O Eyy +
=
s8X aaHy - sy ay
EXX + io+X
W
Ezz+
fo-yy
-)
i7zz
Ex
Ey
Ez
(2.66)
The H fields can be found by duality. Splitting the E fields and substituting Equation 2.65,
we obtain:
(-iWezz
+ Ezzu-y + c7zz
iWEZZ
+
Ezzo-X
+
-
c-zz -
_
=
_Ezy
O'zzUX
Ezx
-1
0
HX
syo Dy
108
=OHy
sX0 OX
CHAPTER 2. THE SIMULATION MODEL
44
(-
ayyu-z
10
szo 0z
-1 0
Sxo Oz
---1 He
0
iWzEyz
iWEyy + 6YY0cz + 6YY -
-iwEyy + E6YY0- + oyy -
W7) Eyx
io
-iwExx
+ ExO-z + O'XX -
c-xx-z)
a
7
E xz
io
+ EXX-Y
( -iWEX
+ oxx -
a-io-Y
= 108 HZ
SY 0zY
E
sy00By
(2.67)
We now introduce the variables:
1
*Eg
Ej =
(2.68)
which correspond to time integration to handle the extra frequency term. Equations 2.67
can then be put into the time domain. For example:
EZZ -Ezy
+ (ezzuy + azz)Ezy
-
(2.69)
H
-zz-yE
where
0
E
(2.70)
=Ez
We can then apply the standard central differencing in time and space to obtain:
E"
-
C3xy
-
E"
C1xzExz(k)
-
C3xz IE ()
-
-
-
Clyx E () - ly yx()
C3yx
X2
H±2
H±2
zyj)
-
zX~j~
H
-
[EX{~j) + AtExy(j)
-
En+1
yx(i)
n"±1
Eyz(k)
C1XYE(j) + C2xy [H
[EYX
C2xz
IH yk+l
+H
±2
yk+-)
-
~2_
H
H~2
yz(k-~)
yx k-
+ AtEz(k)]
C2yx
2y
H+ 21
.
yn+6
zy2~)
zX(i+!)
Hn+1
zx(i-
-
)
H.1)
zy
i-j)
+ AtEyx(i)]
=ClYzEyz(k) + C2yz
n+k
+
n+
H
+y~
H
4.!
n+1
- H 2
n+ 1
- xz(k-
2.4. PERFECTLY MATCHED LAYER
Ezy(
n+1
ClZYE
)
H
(j) - C 2 zy
C3zx
=
Dy1H
-
D3y H
-H
21
xz(i--)
y
yz(i+)
-
1yz(i-
+ AtEx )
- + AtH
( + !)
x
- Ezx(j) - Ezy(j)
I
xy(j+i)
D~
xkl
yz(k+1)
-
Eyx(k) - Eyz(k)
D3z Hxz.(k+!)
I1)
+AtH xz(k+l)
-
n- 2nn
=D1xH
D3x
-
1)+ D2x [Ezx(i+1) + Ezy(i+1) - Ezx(i) - E"y(i)
H yx(i+A)
I+ AtH>±l)]
yx(i+EE
1
D
~DizHyz(k±)21
zax(i±.I)
yz(j+)
Iyx(i+i)
D zk2 +
Hyz(k+-!)
2
H +2
Y
xy(j-i)
1
n+.!
2
- H
(j+ - D 2y [Ezx(j+l) + Ezy(j+1)
2
H
1)
+C 2 zz H
E
-
2
Hf Y + H"
xz(j+)
I ( j+-)
7j) 2+E
CizxE z(i)
-
AtE Z(k)
2
C3zy [E
-
En+l
zx(i)
E
C 3 yz
-
45
D3z H
-
~Dix(l
-
-D2z [Exy(k+l)
yz(k+)
+AtH
+Ex"z(k+1) - Ex"y(k) - Exz(k)I
2
yz(k+l)
+-, D 2 x [Eyx(i+l)
+ E"z(i+1)
1
D3x HI(n-1)
+ AtHn
zx(i+)
zx(i+!)
DlyH
- E"x(i) - E"z(i)
(?L + D 2y [Ey(j+1) +Exz( +l) - Exy(j)- Ex"z(j)
3
D3yHI(-1)
zy(j+-i)
(
+zyAtHj+7)
1
(2.71)
where:
-e
-
Cl (
At +
( a±crs)
CHAPTER 2. THE SIMULATION MODEL
46
C2
1
Ct
'1 0
+
-
c
CCO
D +
1
D 3(
=
(2.72)
The spatial notations in Equations 2.71 are abbreviated, as the field values are still in the
same place on the Yee lattice (see Equations 2.18 for reference), except where denoted.
The profiles of sC and o- must be chosen to increase gradually, in the same fashion as the
original PML. In this case, we choose:
= 1+ sm
S
om sin 2
o-((
(2.73)
With these profiles, a normal wave propagating into the PML is attenuated in a parabolic
fashion (exactly as Berenger's PML), and an evanescent wave is attenuated as s(()-((),
which begins approximately as a parabolic profile, and approaches J as a linear profile. The
reflection coefficient is then chosen as:
R
f sco(C)Oc(C)
=
e
=
e om6[1+s(
+2)]
(2.74)
2.5. NEAR-TO-FAR FIELD TRANSFORMATION
which allows us to choose
Urm
47
as:
am =
-c
(2.75)
6 (1+8sm [1+
2
Usually sm, which affects the increase in the attenuation profile, is chosen to be between 1
and 10.
2.4.4
Numerical Experiments
To ensure the new PML is working correctly, and as a comparison with the Berenger
PML, a simple reflection coefficient analysis is performed.
A
directed dipole is placed
at (0, 0, 0), and the field is measured at 15 cells away along the axis for two cases; a very
large computational domain and a domain where the PML is 20 cells from the dipole. For
the large computational domain, the reflections from the PML are delayed in time and
can be windowed out. The reflections from the PML can then be isolated by measuring
the difference in the fields for the two domains.
electrical conductivity of
medium.
U
Both computational domains have an
= 0.1. The new PML is tested for an isotropic and a uniaxial
From Figure 2-7, we see that the PML with stretched coordinates yields an
improvement of 26 dB over the original PML. The reflection error of Figure 2-7 is defined
as difference between the electric field in the small domain (with reflections) and the large
domain (without reflections), or 10 log(Esmaii - Earge).
2.5
Near-to-Far Field Transformation
In addition to introducing the incident field, and FDTD simulation must also extract the
scattered field in a meaningful way. This can be done by either directly modeling a receiver
to capture the near field, or using a transformation to obtain the far field. In the problems
studied here, the latter method will be used, as we assume the receiver is in the far-field.
The near-to-far field transformation for layered media presented here was first implemented
CHAPTER 2. THE SIMULATION MODEL
48
-20
Berenger PML, Isotropic
PMVL, s = 10, Isotropic
PML, s = 10, Anisotropic
-- -
--
-
-
-
-- -
-30 ---
......
-450
6t-0
14....
so1
.--
- -
-7 0
-
100
-
200
300
4
oo
T
ime
-
-
-
-
--
700
800
900
1000
Step
Figure 2-7: Reflection Error of PML and Stretched Coordinate PML ABCs
in the FDTD technique by [32], and is based on Huygens' Principle:
E(T) =
J
dS' [iwiG(F, T') -~J(r') - V x G(T, T') - M(')
(2.76)
where:
7(T')
1A(W')
n x H1(')
=
E( F')
x
ii
(2.77)
Using Huygens' Principle, we can completely define the scattered fields as magnetic and
electric surface currents over a closed surface around the scatterers. The electric field in
the far-field can then be found using Equation 2.76 and the appropriate Green's function.
In this case, the Green's function is for a current source in a layered medium, using the
far-field approximation. Implementing Huygens' principle in the FDTD domain is done by
capturing the scattered field information on a virtual surface (Huygens' surface) around the
2.5. NEAR-TO-FAR FIELD TRANSFORMATION
49
scatterer. The fields are then transformed to the frequency domain (or done on the fly with
a discrete Fourier Transform) for placement into Equation 2.76. The virtual surface must
be created in the scattered field domain, and must be large enough to account for all the
interactions in the problem geometry.
We will now derive the appropriate Green's function for this geometry, using reciprocity.
2.5.1
Reciprocity Theorem
Reciprocity was shown to be valid for an electromagnetic field on a discrete lattice by Chew
in [33]. The reciprocity theorem holds for any medium with symmetric permittivity and
permeability tensors. The theorem states that, for two sources a and b,
(a, b)
=
(2.78)
(b, a)
where:
(a, b) = J
2.5.2
dV (Ja - Eb -
a - 1b)
(2.79)
Formulation
Consider a buried current source j at T', and a test current source Jt above the ground in
the far field at 7. The reciprocity theorem states that:
Kt, Ef) = (7,Et)
where
E
(2.80)
is the far-zone radiated field of ~ in the far field at the test source, and Et is
the field radiated by the test current at the location of . Integrating Equation 2.80, we
obtain:
EJ1 9 Iodo + Ejf,4d4
=
(Et, + E0) I:dz+ (E0 + E0 ) Id,
+
(Etz+ E0j) Id,
(2.81)
CHAPTER 2. THE SIMULATION MODEL
50
where Ejf, and Ejg, are the 0 and q$ components of the far zone fields radiated by currents
I2, I., and Iz, which have lengths do, dy, and d, at '. E is the
component of the electric
field at 7' radiated by a C directed test current in the far field, and so forth. I.d, is the
electric dipole moment of the buried electric current elements. We can then solve for the
far-fields as:
Ej
=
EJf,
=
1
(EId + E0 1,dy + EozIzdz)
Ijd [(EtxIxdx + EoIy dy + EOzIzdz)
(2.82)
The far fields radiated by buried magnetic current sources can also be found from the
reciprocity theorem:
t Et)
where E
= -
,
(2.83)
is the far-field radiated by a buried M source, and Ht is the magnetic field at T'
radiated by the test current source. Integrating and solving for the far-fields, we obtain:
If=- [(HtxKxdx + Ho Kydy + Htz Kzdz)
E
E
j
1
1 0Kxdx + Ho Kydy + HO Kzdz)]
(HF
(2.84)
where the same notation convention from Equation 2.81 apply. In this case, Kx is the
buried magnetic current element, and Htx is the magnetic field at ' radiated by the test
current at T. Kxdx is the magnetic dipole moment of the buried magnetic current elements.
The far-fields created by buried magnetic and electric current sources can now be found as
a function of the test fields.
Finding the test fields directly follows the derivation of the incident field in Section 2.3.
Two test fields, TM and TE, must be evaluated, corresponding to the far-field test elements
2.5. NEAR-TO-FAR FIELD TRANSFORMATION
51
oriented in the 9 and q direction, respectively. The fields incident on the layered medium
(at do) can be easily solved using the free space Green's function, which corresponds to:
E (TE)
___WIdoe
47rr
O(TM)
i kIodoeikr
47rr
(2.85)
where k-r"
=
k (x' sin 9 cos q
+ y' sin 0 sin #
-
do cos 0), using the far-field approximation and
dropping the absolute phase term. The free space Green's function is used to propagate
the test fields to the interface of the layered medium directly above the current element of
interest (").
With these fields incident on the layered medium, the fields in any layer 1 can
be found using the method shown in Section 2.3. We then obtain, in terms of the surface
currents on the Huygens' surface in the FDTD domain, the far-field as:
Ejf5
JjdS
=
-
=
EJfM
Jj dS
JdS
SJsdS
47rrI
[[ikek"
(-CTE1 Jx (r') sinq + CT E1 Jy (r')cos
#)
_i-ikr4irr 47r-(CTE2Mx(r')COS0+ CTE2My(r') sin#0+ CTE3Mz(r'))1
4r
47rr
(CTM2Jx(r') cos q + CTM2Jy(r') sin q
f sd
(-CTM1M (r')sin
#+
+ CTM3Jz(r'))
CTM1M (r') cos #)
(2.86)
where:
CTE1
CTE2
CTE.3
(Aleikzz' + B1 eiklzz')
CTM1
!k=
Lop
(lz
ikilzz'
-
B1 eiklzz'
Aleikjzzi + Ble-iklz')
CHAPTER 2. THE SIMULATION MODEL
52
CTM2
-!
CTM3
-
Bie-ikzz'
,t (Aleikizz' -
(le
ikzz'
+
Ble-ikizz'
(2.87)
The subscript 1 in this case refers to the layer in which the current element (at T') is defined.
The values for Al and Bl are found in Section 2.3. The integration in Equations 2.86 is
carried out by summing the contribution of each current element over the Huygens' surface,
multiplied by A 2 . Defining the surface currents can be done in a manner of ways, in this
case by obtaining a current at the center of the cell face by averaging the surrounding fields
(two for the electric fields, four for the magnetic fields).
2.5.3
Numerical Experiments
To test the far-field transformation, we set up a half-space geometry, with the upper half
free space and the lower half a dielectric with e = 1.2EO and yt = po. Two test cases, a JY
source and a j, source, are placed in the dielectric 0.25 m below the surface. The sources
use a Gaussian pulse with a center frequency at 500 MHz, and the cell size is 0.01 m. The
transformation surface is a 1 m x 1 m x 1 m surface, centered around the source. Figure
2-8 shows the RCS of a 7, source, as well as the analytic Green's function solution. Figure
2-9 shows the results for a J, directed dipole and the analytic solution. In both cases, the
agreement is excellent.
In addition, the RCS for a plate that is 1A x 1A in free space (the dielectric is set to
unity) is shown. Note that the MoM code assumes an infinitely thin plate, where as the
FDTD code will have some finite thickness, even though it is created using E, and Ey
components on a planar surface. When any object is created in FDTD, it often appears
slightly larger than it is due to the cell discretization. The spatial error is on the order of a
half-cell, and can be minimized by decreasing the cell size. Despite this error, the agreement
is again excellent.
2.5. NEAR-TO-FAR FIELD TRANSFORMATION
-
-52
- - -
53
-
E Exact
- E FDTD
-
.54
-56
-58
-60
a -62
-64
-66-68-7
0
-75
-60
-45
-30
-15
15
Polar Angle (deg)
30
45
60
0
75
90
Figure 2-8: RCS of a Buried J, source
--
-52
-54
- --.
--.
.-.
....
-
-56
-- -....
-.--. -.
R-58
~~ -. --
- ..--.. - ---.
E E ct]
E FDTD
- - ..
- ...
--
-. -.
- --.....
. -.--
---
- -
- - -.-..
-.-.--
-
.
w -60
-62
-
-64
~ ~ ~ ~~
-. - -.--.-.-.
~~.-.- .-.-.
-66
-70 -50
-75
-60
-45
-30
-15
0
Polar Angle (deg)
1530
45
60
Figure 2-9: RCS of a Buried J. source
75
90
CHAPTER 2. THE SIMULATION MODEL
54
10
1
0 -.-
- - ..---
-.- -.
-.-.--
B2
E/
.
-4
-
-6
- - --
-90
-75
-60
-45
-30
-
. .
FDTD Ehh
FDTD Evv
MoMEhh
-15
0
15
Polar Arige (deg)
30
45
60
75
90
Figure 2-10: RCS of a Plate in Free Space
2.6
A Conformal FDTD Technique
One drawback of the FDTD method is that problem geometries must conform to the coordinate system of the spatial lattice. In this case, whenever the Yee cell is used, objects
that do not conform to the Cartesian grid are difficult to model. Staircasing can be used
to approximate curves, but this remains inaccurate even for small discretization schemes.
The alternatives are to use either globally or locally distorted lattices. One can choose to
use a spherical or cylindrical lattice, but this is usually only reasonable in special cases such
as cylindrical waveguide. More common are local schemes, which are known as conformal
FDTD techniques.
The basis of the conformal technique is to deform the cells (the contour integral of
Faraday's and Ampere's Laws) locally around the curved geometry.
The deformation,
called the contour path finite-difference time-domain (CPFDTD) scheme, is quite rigorous,
but relies on borrowing fields from adjacent cells when the field of interest is not available.
This nearest neighbor approximation is non-reciprocal and non-causal, which may result
in late time instability. More recently, a new method was proposed by Dey and Mittra
2.6. A CONFORMAL FDTD TECHNIQUE
55
[34], which has been shown to be simpler and more accurate technique to model arbitrary
perfectly conducting (PEC) objects [35].
2.6.1
Formulation
In [34], the H field component is always located in the center of the cell, regardless of
whether or not that location lies within the (PEC). It is also assumes that the
H field
is constant within the cell, and that the E fields are constant along the edges of the cell
(zero if on the PEC). The
E
field update equations are unaltered from the normal FDTD
equations, whereas the H fields are adjusted to account for the deformed contour as follows:
Hn
n~+2!
Hx(ij,k)
=H
-
At
2
(ij,k) -pA(i,
EZ(iJk)Z(i,j,k)
j, k)
[Ez(i,j+l,k)lzis1k
+ E,"(iJ,k)ly(ij,k)
-
E"(iJk+1)1y(i,j,k+1)]
(2.88)
where A(i, j, k) is the cell area associated with that
the cell lengths in the
and
y
H field, while
lz(ij,k) and ly(ij,k) are
directions. As opposed to conventional conformal FDTD
techniques, the cells in this scheme are always shrunk, never expanded. Although there is
no nearest neighbor borrowing, this method does become unstable for extremely distorted
cells. As a guideline, it is suggested that the minimum distorted cell size be about 5 percent
of the undistorted cell, and that the maximum cell length to area ratio be about 12 : 1. If
distortion of this magnitude is required, techniques such as a backward-weighted averaging
scheme may be used. The Courant stability condition, Equation 2.20, must also be adjusted
to reflect the smaller cell sizes, usually to 66-75 percent of the condition for the undistorted
cell. To ensure the most stable algorithm possible, the geometry depicted in Figure 2-11 is
used to model a cylinder. The
are the
H fields
E fields
that are not shown.
inside and on the edge of the conductor are zero, as
CHAPTER 2. THE SIMULATION MODEL
56
H
e
PEC
x
Figure 2-11: Quarter of a Cylinder Cross Section in the FDTD Grid
2.6.2
Numerical Experiments
To test the accuracy of this conformal method, a cylinder is constructed that has a 1/5A
radius and is 2A in length. A Gaussian pulse with a center frequency of 416 MHz is incident
on the cylinder, which is constructed with the conformal geometry similar to Figure 2-11.
The discretization size is 0.02 m and the cylinder length comprises 72 cells. The monostatic
and bistatic RCS are compared with an MoM simulation in Figure 2-12, and in all cases the
agreement is excellent. The slightly higher return at normal incidence can be attributed
to FDTD discretization error. The simulation is run for 5000 time steps with no observed
instabilities.
2.6. A CONFORMAL FDTD TECHNIQUE
57
FDTD Bistatic ACS of a Cylinder, VV
FDTD Bistatic
RCS
-15
-15
-20
-20
E
-25
- FDTD
- 25
-30
-- 30
-35
of a Cylinder, HH
-0 .. .40.
-00..
-.-.-.... .
-20
-35
0.0.4.6.8
--- ..-- .--.--.--.. . -.-..
-- ..- ...- ..--40
-40
FDTD
-60
-80
-I-DFDTD
Polar Angle (deg)
-40
MonostaMic RCS of a Cylnder VV
-.-..-- ----- - -
20
60
40
80
Polar Angle (deg)
FDTD Monostatic RCS of a Cylinder HH
5
0
0
-20
-.
..
0
- --- FDTD
mom
-5
-- .
-5
-10
-
-
-.-.-- -
-
-
-
U-10
o
FDDMoDTatcRD
yidr
V
.--
-15
-15
-
- -- - - -
-
--
--
- -
m
- o m-- --
- - --
+
- -
-
-
-
-
-
-
-
-20
..--.--.
..-.. .-
--.
0 -20
S
-- 25
-30
-30
-.35
-35
---
- - -
-
.- .-. . .
---.
-.-.
20
30
40
Polar Angle (deg)
50
60
70
--
80
- --.- -
.-..
0 90
10
-. -.
.-.-.
--.
20
-
--
--....
--..
----......
-25
10
-
E
-.-.. .. .
30
40
Polar Angle (deg)
.
00
.. .-.
....
60
70
Figure 2-12: Monostatic RCS and Bistatic RCS of a Cylinder Using Conformal Mapping,
Cylinder Diameter = 2/5A, Length = 2A
80
90
58
CHAPTER 2. THE SIMULATION MODEL
Chapter 3
Numerical Dispersion of FDTD
Anisotropic Media
3.1
Introduction
The scattered fields of an object in or below a random medium can be very small depending on the loss, size, and distorting effects of the medium. As a result, when solving such
problems by numerical means, it is necessary to obtain a large dynamic range. The FDTD
technique is based on a second order central differencing scheme, and thus is subject to
numerical dispersion as demonstrated in the previous section. For many applications, these
dispersion errors are small and need not be addressed. In larger problems, however, such
as the subject under consideration, the numerical dispersion can accumulate to cause significant error in the calculations.
This is a particular problem when the total/scattered
field formulation is used, because the traditional method removes the analytic value of the
incident field on the Huygens' surface surrounding the scatterer. As shown in the previous
chapter, when numerical dispersion distorts a propagating field, a small amount of the incident field escapes from the total field domain into the scattered field domain. In geometries
where the scatterer is small or obscured (as in this case), the scattered fields can be on
the order of the escaped incident field, resulting in distorted measurements. To alleviate
59
60
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
this problem, ideally a finer discretization or higher order FDTD method could be used,
but that would require an unrealistic amount of memory for large problems. Instead, k,
the dispersion relation, field calculation, and reflection and transmission coefficients will be
reformulated using discrete calculus that quantifies the effects of the discretization error.
These new results will be used to calculate the incident, reflected, and transmitted fields
on the T/S box. While numerical dispersion will still unavoidably exist within the FDTD
simulation, these errors will no longer have a severe impact the scattered field measurements.
3.2
Discrete Calculus
This section will present the notation for discrete calculus, following that found in [33].
We begin by defining the forward difference and the backward difference. If, in continuous
space, we define the differentiation:
(3.1)
g(X) = dXf(x)
Then in discrete space we may define:
9+1= Oxf m =
(f m +1 - f m )
(3.2)
(fm - fm-1)
(3.3)
or
1
gm-i
where fm
=
=
frm n=
f(mAx), Ax is the spatial discretization size,
&a,
is the forward difference, and
a, is the backward difference. Consistent with the FDTD formulation, gm+. and gm-±
are defined at half-grid points. The same formulations can be shown for the temporal
discretization, where the calculation of E and H are offset by half-time steps. If we then
define a time harmonic field on the FDTD lattice as
Em
=
EeikmAx+ikYnAy+ikpAz-iwlAt
(
(3.4)
3.2. DISCRETE CALCULUS
61
where m, n, p are the spatial discrete coordinates, 1 is the discrete time step coordinate and
At is the discrete time step size. With this field, we can replace the differential operators
as follows:
a
8
- (e-s
-
6t
-
-+ - 2
=
(i
-
i)
-
At
=
e-wt)
=
2e-iwAt/2 sin (
At
(2
2eiwAt/2 sin
-ie-"t
=
=
-i
e
sin 2 (wAt
(3.6)
(3.7)
(2)
(At) 2
(3.5)
where 6 t = wAt/2. One can see that the phase terms cancel for a when both a forward and
backward differentiation is applied. In addition, as At -* 0 then Q -+ w, as expected. For
the spatial differentiation, we may obtain:
6X
6
S6x
2
-K2
-+
-+
)
(1
4
(A)
eikxAx/2 sin
1)- =
(e ikx;
- eikxAx)
sin 2
(kxAx)
e-ikxAx/2 sin (kxx)
-
iK e
=
iKxe- 6 x
(krxA
2
(3.8)
(3.9)
(3.10)
where Jx = kxAx/2. Again, as Ax -+ 0 then K, -+ kx, as expected.
Maxwell's Equations in discrete space (on the FDTD lattice) may be defined as:
V x Em
V
XH
2
=
-
=
PtD
B
1
2
S2
V -DM
PM
(3.11)
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
62
where m + 1 refers to (m+ -, n+ 1, p+ 1). Note that V here is referring to the forward curl
operator, not the stretched coordinate curl operator defined in Chapter 2. The divergence
equations are derived from the discrete charge continuity equation V
J + 0 tp = 0. The
constitutive equations are also defined in discrete space as:
Bm+1!
=
Dm
=
Tm
Hm±
(3.12)
m Em
We also define the electric current as:
.~.=
1
M2
.
~._
(3.13)
Em
=ea
In these equations, B and H have been chosen as back-vectors while D and E have been
chosen as fore-vectors. This choice is arbitrary, and follows the notation of [33]. Now that
the basis of discrete analysis has been presented, the next section derives the dispersion
relation for discrete anisotropic media.
3.3
Dispersion Relation of an Anisotropic Medium
From Equations 3.11 and 3.12, we may derive the vector wave equation in discrete calculus
as:
x
i
- V xEm
2
Em
mi
m
(3.14)
The superscripts denoting the time coordinate have been dropped as all the terms exist at
time 1. For example, the current term on the right was originally at 1 - 2', but in deriving
drvn
3.3. DISPERSION RELATION OF AN ANISOTROPIC MEDIUM
the wave equation it became
JM
2
= 7M.
63
We will limit this derivation to the uniaxial
anisotropic case, though it will be apparent that the formulation can be extended to the
general anisotropic case with little difficulty. In this case, we define a real permittivity as:
S= 0
0
0
Et
0
0
0 Ez
0-t
0
(3.15)
and a uniaxial conductivity as:
0
0
a-t 0
0
0
oz
I
(3.16)
For a medium with anisotropic permittivity, the vector wave equation becomes:
V
x
xEm _
2
Em
.I
-QII-m
=
0
(3.17)
which can be written as:
t
where t2
= t
(t -Em)
_
=0
2m
(3.18)
t. We can show that:
V
7KtEM)
+
+ 50A
+
+
+ ~
±
.&+5
Y~y
"4
y+
60XA&]
az&xEzI
^-
(3.19)
and
2 EM
= , 0xxEx + fjayyEy +
9zazEz
(3.20)
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
64
We then put the vector wave equation in matrix form as:
C1
&V
0x
5A~O
axa
a Oz&2
Ex
C2
avaz
5y
k92&y
C3
k
0
=
0
(3.21)
where
C1
=
-y
- zz
C2
=
A6
- 59
C3
-50. - 5A
+ 1t1A + po-tht
z
+ plet t5t +
a1Ot~t
+ ptzOtt + p-z t
By setting the determinant of the first matrix to zero, a single equation is obtained
that can be solved by iterative means.
When referring to k in the following sections,
we will be referring to the k that has been adjusted for numerical dispersion. Extending
this formulation to the general anisotropic case results in more terms with 'E
in the first
matrix, while the second matrix becomes 3 x 3 containing all the E fields. For the problem
geometry under consideration (i.e. a uniaxial medium), the TE incident field does not see
the anisotropy, so the derivation of the discrete k from Chapter 2 can be used. The TM
field, however, propagates as an extraordinary wave, and the above formulation is used.
3.4
Field Coefficients
The derivation of the field coefficients for the TE and TM cases must also be redefined in
discrete calculus.
3.4. FIELD COEFFICIENTS
3.4.1
65
TE Case
E
For the TE case, we begin by defining a transverse
5y
where k
=
= Ee
field propagating in the q
=
-
0 plane:
(3.22)
k - 2kz. The H7 fields are then:
e
>**
At sin
3
z /2
2]
x-
-E
Axsin (w te-
Y
it/2,
At sin ( kxA) e6z /2
Ax sin (w)
e-i/ 2 ,iE
(3.23)
The phase terms above reflect the staggering of the fields in space and time. When using
these field values in the total/scattered field formulation, the phase terms must be dropped.
This is because the total scattered field boundary for the H field components is already
spatially and temporally offset on the FDTD lattice with respect to the E field components.
3.4.2
TM Case
The TM case begins with a transverse magnetic field, propagating along the
#
=
0 plane,
defined here as:
I=
HeikriwAt
(3.24)
from which the F fields are:
Ax sin
)Eteibt/2
e2o /2
At sin
Ex-
2
f
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
66
At sin
Ez
=
(kA.)ei /2
A, sin (wAt)zeit/2 He&2"
(3.25)
Reflection and Transmission Coefficients
3.5
The formulation here follows [36], which deals with the PML in discrete space for TE
incidence. We need to define R and T for a single interface, which can then be put into the
formulation presented in Chapter 2 for multiple layers. We will define the coefficients for
the uniaxial case. The fields are propagating in the -2 direction, from region 1 to region 2.
3.5.1
TE Case
We define the E fields in regions 1 and 2:
E
E2
oeikeiT + RTEEoeikr
=
=
TTEroeikt-
(3.26)
where E 0 = 9E 0 , ki = ,kj:
and r
=
imAx + PnAy +
+
ky -
ZPAz.
kjz, kr = ikjx + jkjy +
kj,
kt =krx + Pkry -
krz,
On the FDTD lattice, we assume that the E fields exist
at the dielectric interface boundaries, so we may directly enforce phase matching of the
tangential components at the boundary z
=
0 in Equation 3.26, which results in:
1I + RTE
-
(3.27)
TTE
From the discrete Maxwell's equations, we obtain the H fields as:
=
Ht#-
Ki x
E
e
zrg + RFTE Kr xE
+R1
0
ei,
3.5. REFLECTION AND TRANSMISSION COEFFICIENTS
H2
67
TTEKt x Eo k
=
H2M
(3.28)
where
Ki
, K1,,e61x +
=
Kiye'6 1 - 2Kie-i6 '
+ PKiye61Y + 2Kizehlz
Kr =
,iKixe61x
Kt=
IiK 2xe%2 -+
K 2 ye 2y - 2K 2 ze
6
2z
(3.29)
and Kim
=
kisinc ( 6 1:),
6
1x
=
2t
kiAx/2 and
The phase term for the
Qe-iwAt/2.
-
2 component of the Kr vector is changed from the Ki vector because the forward and
backward vectors are defined with respect to -2 for the incident field and +2 for the reflected
field. Note that the phase term of the z - component of the Kt vector is also switched from
that of the incident field, even though they are traveling in the same direction. This is done
because in region 1, the H field is translated forward to the z
=
0 boundary, whereas in
region 2 it must be translated backward to the boundary. In Figure 3-1, one can see that
in the upper FDTD domain, the H field is a forward vector from the boundary (E field),
whereas in the lower domain the H field is a backward vector from the boundary, both
with respect to +2.
We now want to match the tangential H fields at the boundary, but
we must take into account the fact that they are not defined there. The phase terms allow
us to translate them through the half-cell space, but the field difference must also be taken
into account.
Going back to the discrete Maxwell's equations, we find that:
Oz2 x Hm+
-
(3.30)
(
~p)z=O
68
CHAPT ER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
H1
x
H
E
X
H
2
Figure 3-1: H and E fields around the discrete FDTD Boundary
Applying Equation 3.3 we obtain:
Kz2Az)O
(3.31)
x Hz=.i2 - Hlz=-I)
=
2
z=O
Note that when A,
-+
0, Equation 3.31 reduces to the usual continuity of the H fields
at the interface.
Using the tangential H fields from Equation 3.35 in Equation 3.31 we obtain:
Kze-16Z +RTEK
[u1
=
i1z
K2Az1
K2ze2
_TE
(3.32)
JZ=0
\
P2
_
,A
Solving for RTE and TTE in Equations 3.27 and 3.32, we obtain:
K1
RTE
e-ijz
Kizei6 1zP
2
+
K 2 ze-i2zyt
Kiz/U2
T TE
Klzei6 lz1u
2
+
+ M112 i
K 2 ze-i2z.Y
p2 -
K
/112
iK
z=0
z=Az
(ei6iz + ei6z )
6
2
-
A
ze-i 2z1
-
t/12
(iK2z
2z=
(3.33)
3.5. REFLECTION AND TRANSMISSION COEFFICIENTS
3.5.2
69
TM Case
For the TM case, we define the H fields in regions 1 and 2 as:
H1
=
Hoeiki-1 + RTMgoeikrrl
H2
=
TTM
0oeikt-F2
(3.34)
where Ho =
H.
In this case, the H are defined at half-cell steps away from the z = 0
boundary, so we can define 71 = ,m/A, +
2(p - -)A,
ndy + 2(p + !)A,
and f 2 =
mA, + inAy +
Again, from the discrete Maxwell's equations we can determine the E fields as:
Ki x H 0
.
e
-
61 -Ei
62
-E 2
=TT
e
+ R TM K, x Ho ek,.-
TKtx Ho ik "
e
t
(3.35)
where
Kr
S=
i Kje~ 1x + PKiye -iy
=
iKjxe~4*61x
t=
-
+ PKiye -i
K 2xe'62x + pK 2ye 2y
2KjzeM12
+ 2Kize -iz1
-
2K 2ze i2
(3.36)
In a similar fashion as the TE case, we define Qt = QeiwAt/ 2 , and follow the same phase
convention. In this case, in the upper FDTD domain, the E field at the boundary is a
backward vector from the H field vector in region 1, whereas in the lower domain the E
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
70
field is a forward vector from the H field in region 2, both with respect to +2. We then
match the boundary conditions at z = 0 for the tangential E field components. We then
obtain:
_
+ RTM xKize
e1xlye
'"
Hye'
= -TT
SK 2 ze-2xH e
(3.37)
ftEt2
fLtcl
Qtfti
From the discrete definition of J, the permittivities are defined as:
Eti
Et2
jo-it
En +t1-|+t2
~~
(3.38)
We must drop the phase terms in Equation 3.37 as they act to translate the H fields to
the z
=
0 boundary. The T1 and T2 terms both become T and can be canceled. We can the
obtain the first TM equation, which matches the E fields at the boundary:
sin 6iz (RTM _)
=
TTM sin 2z(3.39)
Etl
Et2
To match the H fields at the boundary, we must again use Equation 3.30. In this case,
phase terms must be added to the H field values to translate them to the z
=
0 boundary.
We also substitute the iz component of the transmitted F field into 3.30 to obtain the F
field on the boundary. We then obtain:
az
x Hm+T =
2
TTMH eik-2
^ e 2
QE2t
K2
2z
+
K2x
2
(3.40)
E2z )z=
which results in:
e~11
+ RTMeibiz = TTM
(ei62z
-
)
(3.41)
3.6. NUMERICAL EXPERIMENTS
71
where:
A-
iKzTM
iK 2 T
Q2 P
K2
K2
K~ z + K~x
(Et2
(3.42)
'Ez2 )Z=0
We may now obtain RTM and TTM from Equations 3.39 and 3.41:
RTM
-
1e6iz sin (6 1z)et2
e-iz
TTM
(ei62z
-
A)
e-i 6 2z Sin (2z)Ctl
A) + sin 6 2zEtl
-
sin ( 6 1z)6t2 (ei'2z -
5
1 + e-iniz) sin ( 1z)Et2
=s
e-i2
Sill (6 1z)et2 (ei2z
-
A) + sin ( 6 2z)t1
(3.43)
From these equations, we can see that in the discrete domain, the reflection and transmission coefficients now both include the anisotropic effects of the medium. One can also
show that these equations reduce to the continuous case when Az -+ 0 and 6t -+ 0. These
equations may now be substituted into the reflection coefficient recursive formula (Chapter
2) as well as the propagation matrices to obtain the transmission and reflection coefficients
for the layered medium.
3.6
Numerical Experiments
For the numerical experiments, we set up a three layer medium as shown in Figure 3-2.
Layer 1 is air, layer 2 is an anisotropic slab with Et2 = 1.1Eo,
Layer 3 is also anisotropic with Et3
Ez2
= 1.25E,
Ut2 = 3
x 10-5
and oz2
=
5 x 10-.
and Oz3
=
9 x 10-5. The total field region is a 60A, x 60AY x 60Az in size, and the scattered
=
1.2e0 ,
1.15c 0,
Cz3
Ut3
= 7 x 10-,
field domain extends 10A beyond to the PML. The boundaries are located at 15Az and
-15Az,
with respect to the axes origin at the center of the domain. The total field region will
be empty, so that the scattered field should be zero. Dispersion error can then be measured
by examining the fields that escape into the scattered field domain. TE and TM waves will
be tested for 0 = 00 incidence and 0 = 450 incidence (05 = 00), which correspond to worst
case and best case dispersion, respectively. The test field will be a standard Gaussian pulse,
72
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
Einc
Etot
Escat
£2,02
£3,03
Huygens' Surface
Figure 3-2: Computational Domain for Discrete Formulation Testing
with a center frequency of 500 MHz (A = A/30) used for measurements. The maximum
amplitude of the Gaussian pulse is 100 V/m. The results will be presented in surface plot
form for visualization purposes, as well as dB graphs for exact quantitative evaluation.
Figure 3-3 is a surface plot of the i - 2 plane of the computational domain at x = 0. In
this plot, as with all surface plots presented in this chapter, the total field is removed for
scaling purposes. The field is traveling along the z axis (at 0 = 0) in the -2 direction. The
time step of this plot corresponds to the maximum field value. The numerical dispersion of
the FDTD domain results in a scattered field which is -16.56 dB of the total field, at the
maximum field error point directly below the total/scattered field box.
Figure 3-4 is a surface plot similar to Figure 3-3, after the discrete formulation has been
applied to k, the field coefficients, RTE, and TTE. In this optimized case, the scattered
field error is much less, only -38.4 dB of the total field.
Figure 3-5 shows the value of the scattered field at the point of maximum error, (0, 0, -35),
on the Huygens' surface. The benefits of the discrete formulation are quite obvious here,
with a noise floor for the optimized case that is 21.84 dB lower than the normal case. For
0
=
0' incidence, the optimized total/scattered field formulation has almost doubled the
3.6. NUMERICAL EXPERIMENTS
73
-1
2,
-0.5
1-0.5
03
-2-80--
--..
60
0
-
40
-
20
0
80
70
ZAxis
XAxis
Figure 3-3: TE and TM Numerical Dispersion Error,O
1.5
0
30
40
0' Incidence
.. . .
051
00
8060-40
-10
20
-
0
40
630
0
X Axis
so
70
Z Axis
Figure 3-4: TE and TM Numerical Dispersion Error, 0 = 0' Incidence, Optimized Formulation
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
74
0
-1
0
- -.-.
0
..
--
-- . .- -..
---. -..
--
-.
-3
0
-5
--
-
-
.-.
.-.. -.
-
-
-- -
-
..-.
- -.
. . ...
-.--
- -
- --
460
0
-7
-80
0
tJ
200
-
400
-.
-.
-.
----
---.
..
---
600
Time
Step
-
.
..
+
80
1000
-
1200
Figure 3-5: TE Numerical Dispersion Error, 0 = 0' Incidence
dynamic range of the scattered field measurements.
Figure 3-6 shows the maximum error of a TM field (the Hy component) at 0 =0
incidence. As expected, it is exactly the same as that of the TE field at normal incidence,
because the TM and TE cases are both ordinary waves when propagating along the optic
axis.
Figures 3-7 and 3-8 show the scattered field error for a TE wave at 9 = 450 incidence,
for the normal and optimized cases. For the normal case, the error is -23.5 dB of the total
field, which is better than the 0 = 0' incidence case as expected. In the optimized case, the
scattered field error drops to -38.3 dB.
Figure 3-9 shows the TE scattered field for 9 = 450 incidence at the point of maximum
error, (0, 0, -35).
The improvement here is 14.8 dB, which is less than the 9 = 0' case.
This is expected because at this incident angle there is less error in the continuous I, so the
discrete T yields less of an improvement.
In Figure 3-10, we see the error of the total/scattered field formulation for a TM wave
at 9 = 450 incidence. In this case, although the propagation direction minimizes the error
in I, the RTM and TTM coefficients exhibit larger error for the extraordinary wave. The
3.6. NUMERICAL EXPERIMENTS
75
Cases~
-10mze
tv'1(I1 j
-20
-30
~
.70
0
~
~
200
I
....
... ...
400
00
Time
So
step
1000
Figure 3-6: TM Numerical Dispersion Error, 0
1200
=
0' Incidence
0.5,
in
-0.5
80-60-40-
-20
X Axis
0..-
7
0
-10
0
-30
5
20
40
Z Axis
Figure 3-7: TE Numerical Dispersion Error, 0 = 450 Incidence
76
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
7'5
-0.
600-.
40
0
-
---
50
6
70
80
0
0
20
3
4,0
20
4
Z Axis
X Axis
Figure 3-8: TE Numerical Dispersion Error, 0
=
450 Incidence, Optimized Formulation
Optimzed ase
-20
. ... ..
I
-30
5. 0
.
0
. .....
..
.....
~
~
-70.........
200
400
...
6
TIme Step
.
WI-
800
1000
1200
Figure 3-9: TE Numerical Dispersion Error, 0 = 45' Incidence
3.6. NUMERICAL EXPERIMENTS
77
0.5.
Z
01
.
-0.5
20
70
406-
60
80
X Axis
8
50
0
10
20
3
Z Axis
Figure 3-10: TM Numerical Dispersion Error, 0 = 450 Incidence
maximum error for the normal case is -24 dB down from the incident field. Note that
here the Hy field is measured, and the z axis is reversed for display purposes (the wave still
travels in the same direction).
Figure 3-11 shows the error after optimization, and the improvement is evident. The
maximum error is -33.6
dB down from the incident field.
Finally, Figure 3-12 shows the maximum error of the Hy field at (0, 0, -35).
The op-
timization has reduced the noise floor by 9.24 dB. The residual error that is still present
after optimization is a result of the averaging of various field values around the boundaries
to obtain the R and T coefficients.
78
CHAPTER 3. NUMERICAL DISPERSION OF FDTD ANISOTROPIC MEDIA
0.5,
01
A)
-0.5
0
-8-0
40
70
406-0
5
40
60
0
80
10
20
3
Z Axis
X Axis
Figure 3-11: TM Numerical Dispersion Error, 0 = 450 Incidence, Optimized Formulation
-10
-20
-30
--
-
-----
--Noma
-pll~dCe
.50
-60
-70
-8000
200
400
a00
800
1000
1200
Time Stop
Figure 3-12: TM Numerical Dispersion Error, 0 = 450 Incidence
Chapter 4
Random Medium Models
Two random medium models will be implemented in this simulation. Both models use correlation functions as their basis, however they incorporate correlation lengths and variance
information in different ways.
First, to simulate the scattering from foliage (a medium with discrete scatterers), strong
fluctuation theory [37] will be used to determine the effective permittivity of the vegetation
layer. This effective permittivity takes into account the wave attenuation and scattering
caused by the discrete scatterers (leaves). The phase fluctuations caused by the scatterers
is extremely small for the frequencies of interest (A/50 is the size of the scatterers), and will
not be addressed here. Due to this type of correlation function, the effective permittivity
will be uniaxial, which reflect the orientation and symmetry of the discrete scatterers.
The second random medium model will implement a spatially fluctuating permittivity directly into the FDTD domain, based on a given correlation function and variance.
This case applies when the correlation scales are closer to one wavelength. The continuous
random medium may represent a geophysical medium such as soil that does have continuously varying spatial permittivity fluctuations, or a statistical description of a medium with
discrete scatterers at random locations [18].
79
CHAPTER 4. RANDOM MEDIUM MODELS
80
4.1
Correlation Function
We will choose an anisotropic correlation function that has a Gaussian profile in the transverse directions and an exponential profile in the longitudinal directions, defined as:
2c~ e
C(T1 - T2) = 6'Ee
-(|1
-
21 2-_1Y1-Y21 2)
12(41
z
z l
e-z
(4.1)
This correlation function has been used in numerous studies to describe vegetation
[6],[5],[38],
as well as in the original derivation of strong fluctuation theory [37].
This
correlation function describes an anisotropic medium with azimuthal symmetry.
4.2
Effective Permittivity Model
For correlation lengths much less than a wavelength (~
A/50), the FDTD grid (sampling at
~ A/30) cannot resolve the fluctuations in the random medium. As a result, the mean effect
of the medium is determined by an effective permittivity derived from strong fluctuation
theory.
4.2.1
Strong Fluctuation Theory
Strong fluctuation theory derives an effective permittivity of a random medium from a given
correlation function, in this case Equation 4.1. The correlation function models azimuthally
symmetric elliptical scatterers embedded in a background medium. The size of the scatterers
must be small compared to the wavelength, and the permittivity contrast between the
scatterers and the background can be large. Derivation of the effective permittivity begins
with the vector wave equation written as:
V xV x E- k20
.E =o (
r)-7E
(4.2)
4.2. EFFECTIVE PERMITTIVITY MODEL
81
Where 6s is the deterministic uniaxial permittivity defined by:
E9
E9
0
0
0
Eg
0
0
0
6
(4.3)
gz
The electric field expressed in integral form is:
E(T) = Ei(T) + k2
where
d'-G(,')
(
9
-69
E(f')
1E0
(4.4)
Ei (;) is the incident wave and G9 is the dyadic Green's function for a medium
with permittivity --. The observation point in Equation 4.4 is within the source region, so
the singularity term of the Green's function must be considered. The Green's function is
decomposed into a principal value part and a singularity part:
G9(T,
PVGg(7')
(T
-
-
')
(4.5)
0
The effective permittivity is then derived from these equations, but will not be addressed
in detail here (see [37]). The final expressions for the effective permittivity are
Et
=
Eg + 60o (I + S)
Ez
=
Ez+C
fz 6
(Iz+SZ)
(4.6)
where
=
C-f)+
_ s
+ S(Cb
bO - g
10 + Sz(Eb
-
)
Egz)
(f
+
C
2 f
s - cg
E0
+ Sz(s
-
f
Egz)
(4.7)
CHAPTER 4. RANDOM MEDIUM MODELS
82
In Equation 4.7, Eb is the background permittivity, E, is the scatterer permittivity, while E
and cgz are determined by two non-linear coupled equations:
(
Eb -
Eg
CO + S(Cb -
f
Es ~ Eg
+ SEs - Eg) )
f)+
Eg)
(O
Eb - Egz
f)
EO + Sz(Eb - Egz)
+
6s - Egz
f
(EO + Sz (ES - Egz) )
-0
-0
(4.8)
Finally, the values of S, Sz, I, and Iz are:
I
=
+
Iz
8 Jo
ik 12 1 Eg+
gCo
12
jj
kl
2 fo
z+
vl
2,rh (Eg
=
2
ik311z
4
in9erfc
\2hV6/
tanG
2hJ
Eg
co
(tan0
rf (tan0
dO sin2 o tan 0Ge (4_h~b ) erfc
\2hvo/-
oz
k
1
S=
Sz
dOtan 0ekT0Uerfc
=
+
(tan
erfc_ (tan0
k 4l Egz J2 dO sin 0cos Oe (
eg J0
-S+
E
VTgEgz h
eo
~60
dO sin 2 0tan 0
7rtane
V/-r-
2 hdV
Jo
fo0r
dO
tan0
N/i
-
2h
e\
4
$
erfc
(tan 0
\2hV'/
an 0
h]b
(4.9)
where h = l/l
and b = cg/Egz.
The above integrals contain multiple singularities, but
can be solved using the asymptotic expansions of the complementary error function, which
cancels the exponential term. The conditions of validity for strong fluctuation theory are:
k2 1 Eg
4co
<
(4.10)
4.2. EFFECTIVE PERMITTIVITY MODEL
83
and
k 21g
< 1
(4.11)
where 1, and l are the transverse and vertical correlation lengths, respectively.
4.2.2
Parameters and Results
To obtain the parameters required for strong fluctuation theory, physical characteristics of
the random medium must be taken into account. The background permittivity is assumed to
be free space, and the scatterer permittivity is calculated from the de Loor bulk vegetationwater mixing model [39, 40]. This model requires the bulk dielectric constant for dried
vegetation, the dielectric constant of the water, and the fractional volume of the water.
To determine the permittivity of water, we use [41], which presents an experimentally
determined formula which requires the temperature, salinity, and frequency of interest. We
choose standard values of T = 25 C, salinity of 10 parts per thousand, and water fractional
volume of 0.6 percent.
The bulk permittivity of dried vegetation is chosen to be 3
60,
another standard value. The de Loor mixing formula then results in:
/+
-12Vw(/E
b 3
W--
b)
(4.12)
where the the scatterer (leaf) permittivity is ql = c + il', the water permittivity is e, =
e', +
iE",
the dried vegetation permittivity is
6
b =
c's + iE'', and the fractional volume of the
water is V.. The value of the scatterer permittivity is then used in the strong fluctuation
theory formula. The correlation lengths are also taken as standard values from literature,
roughly corresponding to the physical size of the scatterers. The vertical correlation length
is 0.0152 m, and the transverse correlation length is 0.0052 m. Using these values, we find
CHAPTER 4. RANDOM MEDIUM MODELS
84
Frequency
300 MHz
400 MHz
500 MHz
600 MHz
700 MHz
800 MHz
900 MHz
1 GHz
Transverse Permittivity (ct)
1.1513
1.1495
1.1482
1.1472
1.1465
1.1460
1.1457
1.1454
+
+
+
+
+
+
+
+
Vertical Permittivity (6Z)
0.007395i
0.007442i
0.007154i
0.006760i
0.006361i
0.005994i
0.005671i
0.005392i
1.3097
1.3022
1.2969
1.2932
1.2907
1.2889
1.2875
1.2865
+
+
+
+
+
+
+
+
0.03064i
0.03009i
0.02840i
0.02649i
0.02468i
0.02309i
0.02173i
0.02057i
Table 4.1: Effective Permittivity from Strong Fluctuation Theory
the effective permittivities as a function of frequency shown in Table 4.1.
4.3
Fluctuating Permittivity Model
To study a GPR problem, the geophysical terrain will be modeled as a layer of random
medium. In this case, the correlation lengths are on the order of a wavelength, and the
fluctuations can be directly mapped into the FDTD domain.
The permittivity will be
characterized as:
E(T) = Em + Ef (T)
where T = x.
(4.13)
+ yi + z2 and Ef (T) is a function of position characterizing the random
fluctuation ((ef(f)) = 0). The fluctuation at each position is Gaussian random variable
with zero mean, and with correlation function C(f
1 -
T2).
The generation of ef(T) is
implemented in the Fourier domain by passing the Gaussian random variables through a
digital filter whose response corresponds to W(k), the Fourier transform of C(T1
-
T 2 ).
W(k) is the spectral density function of the dielectric fluctuation. We use the correlation
function, described above, as follows:
(I.,
2
K((T1)C*,(f1)) = C(T1 - T2 ) = j E
me
-x2l
_1Y -Y2 2)
P
e
lz1 -z21
1Z
(4.14)
4.3. FLUCTUATING PERMITTIVITY MODEL
85
where 1, and l are the azimuth and vertical correlation lengths, respectively, and 6 is the
variance. We begin by defining the three dimensional Fourier Transform pair:
f(x,y,z)
F(kx, ky, kz)e krdkxdkydkz
=
F(kx, kY, kz)
SJ
f(x y, z)e
krdxdydz
(4.15)
where
=
k
k
+ kyj + kz . To ensure that the dielectric fluctuation will be real, we must
enforce the following relation:
F(k) = F*(--k)
(4.16)
or, equivalently,
FR(k)
=
F1 (k) =
FR(-k)
-F(-k)
(4.17)
with F(k) = FR(k) + iF(k) We also assume:
W(k) = W(-k)
(4.18)
Let:
FR(k)
=
a(k)
W(k)
F1 (k) =
b(k)
W(k)
(4.19)
CHAPTER 4. RANDOM MEDIUM MODELS
86
where a(k) and b(k) are independent random arrays of Gaussian distribution and zero mean,
satisfying:
a(k)
=
a(-k)
b(k)
=
-b(-k)
(4.20)
to preserve the properties of F(k). Note that the average of the fluctuation spectrum is:
(F(T)F*(T')) = (a(T)a(k') + b(k)b(k'))
W(k)
W(')
(4.21)
so the deviation of the random numbers must be:
Ka~k~ak))
=
(b(k)b(k')) = ~6
(4.22)
2
The dielectric fluctuation is then defined as:
Ef (r)
= AF-
1
[a(k) W(k) + ib(k)
where A is a normalization factor, if required, and
W(k)
(4.23)
F- 1 denotes the inverse Fourier Trans-
form in Equation 4.15.
Some examples of random medium implementations are shown in the next figures. Figures 4-1 and 4-2 show the
9-
2 plane cross-section when the correlation length is 25 cells
and 5 cells, respectively, in both directions for a 60 x 60 cell domain size. Figures 4-3 and
4-4 show the J -
y
plane cross-section for the same domain when the correlation length
is 25 cells and 5 cells, respectively, in both directions. The fluctuations are normalized in
these figures. The correlations are Gaussian in the horizontal direction, and exponential in
the vertical direction.
The accuracy of the random medium generator in producing an ensemble of media with
4.3. FLUCTUATING PERMITTIVITY MODEL
87
F-17
0.5
Figure 4-1: Random Media,
Q-
2 Plane Cross-Section, l,
=
25 cells, lp= 25 cells
60
5.8
0.6
so
0.4
40
0
30
-0.2
20
-0.6
10
-0.8
Figure 4-2: Random Media,
-
2 Plane Cross-Section, l, = 5 cells, l, = 5 cells
88
CHAPTER 4. RANDOM MEDIUM MODELS
0.5
0
-0.5
Figure 4-3: Random Media, 2
-
Q Plane Cross-Section, l,
0
=
25 cells
0.4
300
02
20
-0.
-..8
10 -
Figure 4-4: Random Media,
2 - Q Plane
Cross-Section, l, = 5 cells
89
4.3. FLUCTUATING PERMITTIVITY MODEL
Mean
31
Sigma
Iz =
lp=Iz=
Ip = Iz =
1p = Iz =
p=
--
2.98 -
-
-
6
2 .9
-. -.-.-
-
- --
-
-
.......-.-.
0.9-
- -.
. ....
0.8-
ly k
2.96---
-
..- ....- .
.........
.-.-.-..-
W
-.
..-..
..
- --.
.. ....-
- .. ..-.--- .
0-5-
02
.----.. -. ---..-..--.-
-..
.-.-...-.- -..-.-.....
-.
.......
.................... ....
..
-.--.-.
-.--
1p = Iz = 10 A, variance = 0.1 E
p= Iz=10A varlance=0.25E
1p = 1z = 30 A, variance = 0.1 E
I-.
p = 1z = 30 A variance = 0.25 e
..
0.6-
288
--.
-
-.
-
0-7-
2.92 - -. ..
--..
. .-.
-.-
- . -.
- -. .
- --.--.
-
-
-
10 A variance = 0.1E
10A, variance= 0.25 E
30A, variance = 0.1 E
30 A, variance = 0.25 E
28.4
8 8
15
20M10
25
Media Realization
0
35
40
45
50
5
10
15
20
30
25
Media Realization
35
40
45
50
Figure 4-5: Mean and Variance of Random Media Realizations
fixed statistical parameters is shown in Figure 4-5. The mean permittivity of these media
is 2.908, and the two variances presented are 0.25E and 0.1c (mean e).
medium is 64 x 64 x 64 cells (A).
The size of each
The maximum error in the mean is 1.6% and occurs
when the correlation length is 30A and the variance is 0.25E. When the correlation length
is 10A and the variance is 0.1c, the maximum error in the mean is 0.137%. These results are
expected, as the domain that is larger in terms of the correlation length (6 x 6 x 6 lengths)
is statistically more accurate than the smaller domain (2 x 2 x 2 lengths). The worst-case
error of the medium with the larger correlation length to domain size ratio is still quite
acceptable however, and will be used in the FDTD simulation.
90
CHAPTER 4. RANDOM MEDIUM MODELS
Chapter 5
Numerical Results and Analysis
This chapter presents the RCS results of objects in or below the two random medium
models. In the first section, the RCS results of an object below foliage, modeled as an
effective permittivity, are presented. The target geometries considered are that of a cube
PEC and a cylinder PEC, in an air layer below the foliage. The size of the domain is
restricted by the computational resources available, and a careful examination of numerical
dispersion in the scattered fields is performed. In the second section, the scattering from
an object in spatially varying random media is presented. The media are modeled after
soil, and the RCS of a buried rectangular PEC target is examined.
The buried object
problem geometry is much smaller than that of the foliage penetration experiment, and
so computational resources are not a significant restriction in this case. All of the RCS
results presented in this chapter subtract out the reflections from the interfaces, and can
be considered as perturbations in the steady-state layered medium radar return. Scattering
from both TE (H) and TM (V) incident waves will be investigated.
5.1
Object Under Foliage
The problem geometry is illustrated in Figure 5-1. The computational domain is 70 x 70 x 130
cells and discretization size is A/37 at 500 MHz or 1.62054 x 10-2 m.
91
The vegetation
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
92
E(r')
Hi
do
I Total
33Scattering Object
Field Region
Scattered Field Region
HuygensSurface
Figure 5-1: Complete Problem Geometry
permittivity is chosen from Table 4.1 for an incident field of 500 MHz. The computational
domain is longer in the +2 direction so as to maximize the penetration distance in the
vegetation, in this case 1.6 m. The transverse directions are chosen to extend approximately
3/4A around the object so as to capture the object/vegetation interactions for oblique
incidence. The object is directly below (2A) the second layer.
Note that the fields presented here and for the next section represent the scattering from
the object and object-geometry interactions only. The direct reflections from the interfaces
are removed, as illustrated in Figure 5-2. These scattered fields are not included because we
are interested in the perturbations to the RCS response caused by the object, hence only
the direct object return and object-geometry fields are used in the far-field calculations.
The direct returns from the layer can be easily calculated and included in the simulations
if necessary.
5.1.
OBJECT UNDER FOLIAGE
93
(D 0
Ei,01
do
E3,02
Po
Direct Layer Reflection
Second and Subsequent Layer Reflections
Direct Object Scattering
Object - Layer Interactions
Figure 5-2: All possible scattered field contributions. Contributions 1 and 2 are not included
in the simulation results.
5.1.1
The Cube
The first scattering object is chosen to be a cube which is approximately A/2 in each
dimension.
Figure 5-3 shows the monostatic RCS and bistatic RCS for the cube in free
space calculated using the FDTD simulation and an MoM technique. Note that the free
space FDTD RCS response is not perfect, as the curve should be symmetric around 0 = 45
degrees due to the symmetry of the target. The graph is instead slightly skewed to one side,
as compared against the MoM solution. The reason for this inaccuracy is the sensitivity of
the Huygens' surface to numerical dispersion of the scattered field. The Huygens' surface
is elongated in the i direction to capture all the interactions of the scattered field with the
problem geometry, yet still keep the computational requirements reasonable. By choosing
a Huygens' surface of this shape, as well as placing the scattering object closer to the lower
surface, the scattered fields measured at each point experience a different numerical phase
delay error depending upon their proximity to the source. Extensive measurements have
determined that this error is difficult to eliminate. For example, decreasing the discretization
size requires a larger computational domain which increases the irregularity in the Huygens'
94
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
EEhh
EwE
FDTD
FDTM
Figure 5-3: FDTD and MoM RCS Comparison
surface geometry, resulting in a similar error. The ideal solution perhaps would be to create
a Huygens' surface that is a cube centered around the scatterer, but this would require huge
computational resources. Thus we come to one of the limitations of the FDTD technique,
the error caused by numerical dispersion for large domains, and the detrimental effect
dispersion has on the Huygens' surface. Note that the results would be much worse without
the adjustment to the total/scattered field technique described in Chapter 3. The geometries
chosen in this simulation minimize the effects of the dispersion and still maximize the usage
of our computational resources.
Figure 5-4 shows the monostatic RCS of the cube in free space and under the anisotropic
layer. The anisotropic layer attenuates the HH and VV waves by 1.36 dB at normal incidence, with loss increasing for both with increasing incident angle. The HH wave attenuation
maximum is 2.67 dB at 70 degrees, increasing as the propagation path through the slab
increases and more power is reflected at the boundaries. The VV wave experiences greater
attenuation at higher incident angles due to the anisotropy of the layer. The VV wave
passes through the slab as an extraordinary wave, which depends on the vertical and transverse permittivities. In this case the vertical permittivity of the slab has a larger imaginary
part, so the vertical component of the VV wave is further attenuated. The physical reason
behind this is that the scatterers are assumed to be elongated in the vertical direction, and
5.1.
OBJECT UNDER FOLIAGE
95
----
N,'-
Ehh Free Space
Ehh Anisotropic Slab
Evv Free Space
Evv Anisotropic Slab
..
-2
N
-p
~-6
-8
-10
-12
10
20
30
40
Polar Angle (deg)
50
60
70
Figure 5-4: Monostatic RCS of Cube below Anisotropic Slab
thus the scattering of vertical waves is stronger than horizontal waves. The attenuation of
the VV wave at 70 degrees is 6.44 dB. The HH wave also experiences further attenuation
at 69 degrees, which is approximately the critical angle for waves leaving the slab. In this
case, the object is placed so close to the interface that the evanescent waves can still scatter
back into the slab. Therefore, it is difficult to determine the effect of the critical angle.
Figure 5-5 shows the bistatic RCS for the cube at incident angles of 0, 26, 44, and 56
degrees. The effects of the anisotropic layer are evident here as in the monostatic case.
5.1.2
Circular Cylinder
We now replace the cube with a PEC cylinder, and leave the rest of the problem geometry
unchanged.
The cylinder has a diameter of 0.12 m (approximately A/5) and a length of
0.2998 m (A/2).
The cylinder is constructed in the FDTD domain using the conformal
technique introduced in Chapter 2.
Figure 5-6 shows the monostatic RCS for the HH and VV waves. The target return
at normal incidence is very small, due to the small diameter of the cylinder. The RCS
96
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
FDTD
bistatc
FGS of a Cube.
L2
X
X2
0 degrees Incidence
W,
X
FDTD Elstatic RCS of a Cube,
J2
X L2 X 2.
26 degrees incidence
6
--.-.-. -F
.-.-.-.
re- S-pa.-.-.-.
e..
4
..... .
-..
. .........
4
.
.. ..
-.....
2
2
0
0
-2
-2
E
--
.
Ehh. Free Space
Ehh, Anisotropic Slab ..
Evv Free Space
Evv Anisotropic Slab
-
-
-
/
-
-
-
-
-
.
-
.
.
.
.
.
.
-4
.
.
.
-.
. . ... .
..
.... ...
.
...-.
..-.-.-. .....-.
-.-..
.4
-6
Ehh, Free Space
Ehh, Anisotropic Slab
Evv Free Space
-... Evv Anisotropic Slab
-8
12
-60
-8
-60
-4-20. . ..-. . ..-.- - . . ..-. . . . . . .-10 . . . . . . . . . . . . .
-.-.-.-.-
-10
-
-40
-20
Polar Angle (deg)
0
20
60
40
-12
-60
.....
FDTD B
0
0
.2
-8
---.-.-.-. ..........--
--.
.--
-- -------------------
-------
-10
- 14
40
a Cube.
/2
60
statc
RCS
of
X
- - -..-
.- ..-.---
-.
...--...-.-.
-.
- -.
-. ..
X 2.
56
degrees Incidence
Free Space
Ehh, Anisotropic Slab
Evv Free Space
Evv Anisotropic Slab
-.
-e
--- - -.-.--.....-.
......
-- ----
..-..
-
...... ...
-..
. ..
.-.
.-.-.
...-. ..
. .. ... ......-..
-.-.--...
..
-2
-6
112
Ehh,
--
- -. -. - --.-. - -.-.. . .-..-.-- - - - - --..-
- - ----- -
20
....-
2
---
0
4
Ehh, Free Space
....... - -.- Ehh, Anisotropic Slab
- - Evv Free Space
-.-.-.- Evv Anisotropic Slab
2
-6
-20
4
Polar Angle (deg)
FDTD Bistatic PICS of a Cube, k12 X W2 X 2, 44 degrees incidence
4
-40
20
..-..
.-.......-.
-
--.---.--.
-10
-60
.40
-
-20
0
Polar Angle (deg)
-
-
40
20
60
-60
-40
-20
0
Polar Angle (deg)
Figure 5-5: Bistatic RCS of Cube below Anisotropic Slab
20
40
60
5.2. BURIED OBJECT
97
FDTD Monostafic RCS of a Cylinder
-10
~-10
-30
- - ----...--
Ehh Free Space
Ehh Anisotropic Slab
Evv Free Space
Evv Anisotropic Slab
-40
-50
0
10
20
30
40
Polar Angle (deg)
50
60
70
Figure 5-6: Monostatic RCS of Cylinder below Anisotropic Slab
increases as the incident angle increases as both the VV and HH waves become incident on
larger portions of the target. In this case, the RCS for the VV wave is greater than the RCS
of the HH wave due to the vertical elongation of the cylinder. As in the case of the cube,
the VV and HH waves experience greater attenuation through the slab at larger incident
angles. At 70 degrees, the RCS for the HH case attenuated by 2.62 dB, whereas the RCS
for the VV case is attenuated 5.4 dB.
Figure 5-7 shows the bistatic RCS for the cylinder at incident angles of 0, 26, 44, and 56
degrees. The bistatic results show the effects of the anisotropic slab on the scattered fields,
similar to the monostatic case.
5.2
Buried Object
In this section we examine the second random medium model, applied to the GPR problem. A set of random media will be studied that each have different variance and correlation
length parameters. The correlation function used to generate the random media is the Gaus-
98
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
FDTD Bistatic RCS of a Cylinder. 0 degrees incidence
FDTD Bistatic RCS of a Cylinder, 28 degrees Incidence
0
----
.- ....-
-10
....
Ehh Free Space
Ehh Anisotropic Slab .
Evv Free Space
Evv Anisotropic Slab
-.. -.-
- -
1-...
-0
Ehh Free Space
Ehh Anisotropic Slab
Evv Free Space
Evv Anisotropic Slab
-
-
-.
-20
0
a:a
-
..
-.
2.
4.
2D
40
0
-40
P0)aIcAnl(d)
\
t
.501
-n0
E0
-80
-40
-20
0
20
40
Polar Angle (deg)
60
-eQ
-40
FDTD Bistatic RCS of a Cylinder. 44 degrees Incidence
-
-
---.-.-
0
0
PolarAngie (deg)
-20
FDTD
Bstatic
Ehh Free Space
Ehh Anisotropic Slab
RCS
of a Cylinder, 58 degrees Incidence
-
Ehh Free Space
Ehh Anisotropic Slab
..-.-.
Evv Free Space
Evv Anisotropic Slab
-
-
-
Evv Free Space
Evv Anisotropic Slab
.010
60
-
N/
/
E
-
.-
830
4-3
-0
-40
-20
0
Polar Angle (deg)
20
40
S0
-60
-40
-20
0
Polar Angle (deg)
20
Figure 5-7: Bistatic RCS of Cylinder below Anisotropic Slab
40
s0
5.2. BURIED OBJECT
99
sian/exponential profile presented in Chapter 4. Currently there is no literature describing
the inhomogeneous nature of soil related to permittivity fluctuations, so a Gaussian correlation function is chosen for the transverse profile because its generality and simplicity. An
exponential function is used in the vertical direction as one would expect it to be different
from the transverse case due to the effect of gravity on moisture and soil content. In this
study, we examine the scattering (RCS) of a rectangular PEC object in various random
media as well as the scattering of the random media alone. The geometry for the problem
is shown in Figure 5-8. The computational domain is a half-space, measuring 74 x 74 x 74
cells, and the lower soil layer comprises 64 x 64 x 64 cells of the computational domain.
The random medium fluctuations are truncated in the FDTD simulation to be consistent
with the total/scattered field formulation and the Huygens' surface (which must enclose all
scatterers), as well as to match the domain to the PML. The discretization size is chosen
to be 1.224 cm, or A/49 in free-space, which corresponds to approximately A/30 within the
soil layer (mean permittivity) for a 500 MHz pulse.
Again, the fields presented here do not include the direct reflection from the half-space
interface (free-space/mean permittivity), as illustrated in Figure 5-9. The interface return
is removed because we are only interested in the perturbations to the RCS response caused
by the buried object and random medium, hence only the object return, random medium
return (fluctuations), and object-random medium fields are used in the far-field calculations.
The direct returns from the layer can be easily calculated and included in the simulations
if required.
The soil model chosen for this simulation has a permittivity of 2.908 and a conductivity
(-) of 1.14 x 10-2, and has been experimentally determined [5] for a typically dry ground.
For a truly rigorous study however, more careful determination of the soil parameters of
interest is necessary, as soil type and moisture content can vary the permittivity by an order
of magnitude [19, 15]. In this study, the variances (6) of the soil permittivity are chosen
to be 10% and 25% of the mean, and the variance from the mean conductivity is chosen
as 25%. These values roughly correspond to moisture content (water volume) fluctuations
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
100
/E(r')
Hi
El
co
go
do
Figure 5-8: Buried Object Problem Geometry
of a few percent, with a mean moisture content approximately less than 5%. Other soil
inhomogeneities will contribute to the fluctuations as well, but it is difficult to predict their
effect without experimental data.
As opposed to the effective permittivity study, we may choose a finer discretization size
due to the smaller problem geometry (i.e. the incident field cannot penetrate very far into
the soil). With such a fine discretization size, numerical dispersion does not significantly
impact the far-field calculations. Figure 5-10 shows an i - y cross-section of the computational domain, and Figure 5-11 shows an y - z cross-section (the 2 direction is on the
vertical axis). As shown in these figures, the random medium fluctuations are truncated in
the FDTD simulation. This truncation introduces an approximation in the total/scattered
field implementation, because the T/S box fields are formulated without the random fluctuations. In other words, where the incident field is introduced on the T/S box surrounding
the random soil, it is created as if it had propagated through a homogeneous medium. This
5.2. BURIED OBJECT
101
Ei
ErT<K>,GT2+<CF>
Random Media
adm
r
(D
(D
ei
catrn
Direct Layer Reflection
Direct Object Scattering
G)Random Media Scattering
Object - Layer Interactions
Object - Random Media Interactions
Figure 5-9: All possible scattered field contributions. Contribution 1 is not included in the
simulation results.
incident field approximation error is minimized by maximizing the distance between the
target and the transverse truncation. In this case, the random medium fluctuations are
truncated slightly less than a wavelength away from the object, and the error begins to
appear at incident angles greater than approximately 35 degrees. This error is not a significant concern, as with increasing incident angle, the incident fields travel farther through
the lossy medium and experience greater attenuation. In addition, the fields still travel
through a significant volume of random medium before interacting with the target. Ideally,
however, a random medium should be considered that has at least a 2:1 ratio of transverse
distance (object to truncation) to vertical distance (object to interface), so as to minimize
the error in oblique incident and scattered fields (accurate to 63.4 degrees). This problem
also applies to the Huygens' far-field transformation surface, which is based on the layered
Green's Function. The abrupt truncation also may result in small reflections between the
random medium and the homogeneous medium. Further studies can address this, e.g. by
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
102
3.8
-
3.6
Figure 5-10: Random Media in the FDTD Computational Domain, X - 9 plane
applying a spatial filter to the random fluctuations that taper them off as the truncation
boundary is approached, or to use a tapered incident wave.
5.2.1
Random Medium Scattering
In this section, we study the scattering of various random media alone. Three different
correlation lengths and two variances will be used to create the random media, as shown in
Tables 5.1and 5.2 for a single realization. Note that the mean permittivity and conductivity
for a single realization is not perfect, due to the finite domain size. This error is shown for
many random medium realizations in Figure 4-5. The random fluctuations will be applied
to the permittivity and conductivity separately.
Figures 5-12, 5-13, 5-14, and 5-15 show the bistatic cross-polarized and co-polarized
RCS from one particular realization of the random medium with different parameters. In
these cases, the random fluctuations are applied to the permittivity, while the conductivity
is constant.
Note that for these simulations, the noise floor for the co-polarized RCS is
5.2. BURIED OBJECT
103
70
3.5
60
3
50
2.5
40
30
2
20
1.5
10
I1
0
Figure 5-11: Random Media in the FDTD Computational Domain,
10%E
25%E
25%o
lP = 1z = 10
2.905e
2 .9 012E
0
-
= 1, = 20A
2.900e
2 . 8 89E
-
y-
plane
l = 1, = 30A
2.894E
2.873c 0
0.01127
Table 5.1: Permittivity and conductivity mean, for given random medium statistics
10%e
25%E
25%g
l = l=10A
0.2908E0
0.7260E
-
lp=lz= 2 0
0.2 9 07E
0.7262E
-
l=lz =30A
0.2908E,
0.7260c,
2.85x10-3
Table 5.2: Permittivity and conductivity variance, for given random medium statistics
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
104
between -45
and -75
dB (depending on incident angle), and for the cross-polarized case
it is approximately -100
1, = l
dB. As a result, the co-polarized RCS in some cases (J = 0.lE,
= 10A) may be slightly affected by the numerical noise of the FDTD simulation. We
can see that for the medium which has 6 = 0.1c, both the cross- and co-polarized returns are
less than that of the medium with 6 = 0.25E. This is expected as the random medium with
the higher variance has permittivity fluctuations that have a higher contrast from the mean,
thus more energy is scattered. In the random medium with a 6 = 0.25e, approximately 0.4%
of the medium has a permittivity that drops below 1.0, so those portions are set to 1.0.
The random medium with 6 = 0.1E has an RCS return that is slightly less than -40 dB for
the co-polarized case, and -65 dB for the cross-polarized case. For the random medium
with 6 = 0.2 5E, the RCS return for the co-polarized case is slightly less that -30 dB and
approximately -50 dB for the cross-polarized case. The different correlation lengths have
different effects on the shape and magnitude of the RCS return. Immediately one can see
that for larger correlation lengths the RCS return is much greater. This is likely due to the
fluctuations being closer to the size of a wavelength (approximately 30A in the soil), thus
more of the field is perturbed by the fluctuations. The effect of random medium parameters
on the cross-polarization returns is more noticeable than the effect on the co-polarized
return. The difference in maximum return from a 10A correlation length medium and a
30A correlation length medium for a fixed 6 = 0.1c is 9.5 dB for the co-polarized HH wave
and 11.5 dB for the cross-polarized case. For the case where the correlation length is fixed
at 30A, the difference in return from a S = 0.1E and a 6 = 0.25e medium for an HH wave is
9.6 dB for the co-polarized case and 17.3 dB for the cross-polarized wave.
Figure 5-16 shows the monostatic RCS for the cross-polarized and co-polarized fields,
presented to compare the effects of the random media parameters. The VH and HV monostatic RCS results are identical, which is expected given that the media are reciprocal. The
HH and VV RCS results clearly show the effect of the different random medium parameters
on the magnitude of the scattered fields.
In another case, the conductivity of the medium is randomly fluctuating, and the real
5.2. BURIED OBJECT
105
IP = tZ
-10
Variance = 0.25 c
= 10 ,
--
-20
-
-
- *-- *
-
56
-q.
*-
IP= lZ = 1061, VarianCe = 0.25
-30
Ehh - 0 degrees
Ehh - 26 degrees
-Ehh -- 44 degrees
Ehh -- degrees
Ehv - 0 degrees
Ehv 26 dogres
Ehv -44 degrees
Ehv -56 degrees
-
-
-
-...-
-40
-50
.. ..
-50 -.
...--. -
. ... ...
.. . -.
-. -..-
. . . .. ... . ..
-
--
-
-70
-00
-40
0
-2D
Polar Angle
=
1C
20
40
(dog)
0
-00
= 20 A,vaance = 0.25,
-
-
-
0
-20
20
Polar Angle (dog)
0
40
0.25.E
tp=
z =20 A,varlanos
30
-
-.-..-.-
-40
Ehh 0 degrees
Ehh 26 degrees
Ehh 44degrees
Ehh 56 degrees
..-.-.
0dgre
-
Ehv
- ----
Ehv 26 d
9re
Ehv 44 degrees
Ehv 56 degrees
-20
..----.-.
-40
/7.
-50
-70
-80
-40
0
-20
Polar
lp
=
z = 30
Angle
20
40
-00
-40
0
-20
A,variance = 0.25,e
lp
Ehh
-10
--
--.-.-.
.............-.
-- -- .
.. . ..
-- . .
--
00
Polar Angle (deg)
(dog)
20
40
00
0.25 r
tz= 30 A,varlanoo
0 degrees
Ehh 26 degrees
Ehh 44 degrees
Ehh 56 degrees
-3
-
-40
..-..
. .-..
. . .. . .. ... ....
. .. .
.50
Ehv
0 degrees
- - Ehv 26 degrees
- ---- Ehv 44 degrees
-.-..-. Ehv
dogrmas
..-.-... . -.-.. . . - -. - -. . - -.
56
-70 --
0-70
-60
-40
-20
0
PolarA ngle (dog)
20
40
60
-60
-40
-20
-.
.-- ..
- ..- - . ..
-.. * -. . -...-.
-.
0
Polar Angle (dog)
20
40
Figure 5-12: Random Media Bistatic RCS, HH Incidence, 6 = 0.25E
60
106
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
Varanoe=0.25
lp=02=101
p = lZ = 10A,
-
-
-20
......- ..-....- ..- ..-.-*.
--.
0 degrees
Evh 25 degrees
Evh 44 degrees
Evh
- -- Ew2degrees
- - E 44 degreee
. ..-- Ew
degreos
5W
...
Varoance= 0.25
0 degrees
Ev
-.----
.
..--.-..-
40
-
. -
Evh56degrees
-30
.. .
......
5-
--
-40
-
.-
-5-- - - -- -
-.
-60
.50
.
.'. ..... ..
-91)
. . . .
Polar
-0
40 -0
20
(deg)
Angle
.........
-40
60
Polar
lp
.......
-
-----
.-- . ..-
-
.. -.
=IZ
= 20
A Variance =0.25 c
- ------.
Evv 44 degrees
.Ew 56 degrees
.
0
Evh
Evh 28
Evh 44
Evh
56
degrees
degreas
degrees
degrees
.. . ..
480
'
-K
1
4
(deg)
- Ew2edegrees
.
.
*....
20
Angle
0 degrees
SEw
-
-
0
-
lp = tz = 20A varlance = 0.25e
-20
..
-.-.--.-.--.-.--.-.---.-..-.-..-.-.
-70 ..- -....
0
.20
.40
~ ~ ~~
. . .
-50
.......
.............
.g40
-40.-.0.0.20.40
.. . . . ..
. . 0...
. .
...
780.
-80
-40
0
-20
Pole,
IP
=
lz
= 30A
20
00
40
(deg)
Angle
-Wo -40
-20
lp
Vadance = 0.25o
-10
.... -
-20
.........
...--. - Evv
5
degrees
-
-
-
-
-
-
-)
0
-. .
. .
.
. .
-
40
00
tz= 30 A,variance = 0.25 t
Evv 0 degrees
- Ew20degrees
- Evv 44 degrees
7
-4
-30
0
20
Polar Angle (deg)
. .
. .
.
-.-.
-Evh 44 degrees
--- Evh
degrees
-. . .
.-.-
56
-
,-40
05:
-O
-40
0
-20
Point
20
Angle
40
(deg)
00
.80
-Og
-40
-20
0
20
Polar Angle (deg)
40
Figure 5-13: Random Media Bistatic RCS, VV Incidence, 6 = 0.25c
90
5.2. BURIED OBJECT
107
Variance =0.1
0=-1z=10
lp
-
Ehh
-
E)1
-
-30
=
= 103.%varlane
0.
=
0
degrees
26 dgr91.
0 030r9.
Ehv 26 degrems
E
- -
44 degres
Ehh 56 degree
- - Ehh
----
-.-.-.
l
Ehv 44 degrees
Ehv
56 degrees
!)
-50/
.. . ..
-40
*
"
4
....
............
*
*
-
---
-
.. . .. . .
.-
.80
-70
-480
-40
0
-20
20
Polar Angle (deg)
so
40
-80 . -
-... . . -. . . . . . . . . . . . . . . . . . . . ..-.-. .---.- - -
-90
. -.
100
. ..-
-00
..
.
.
-40
.
..-..
.
-
Polar Angle (deg)
- -
0
=
Ehh 26 degrees
44 degrees
- ---
-70
-40
-00
0
-20
Polar Angle
0
-30
--
- ..
.
=
iz
=
30
-.-.
-.
..-..:...-.
20
-100
-80
=
0.1
-.-.
- ---.
0
00
40
20
A warlance
=
0. 1
.
...-
..... -..-......
.. . . . . . . . . . .
0
Ehv
go . ..
-80
'
-40
'
'
-20
0
Polar
Angle
'
20
(deg)
'
40
degrees
...... ... .... .._...
..
- - - -.-..
7C
' '
'
90
-00
-
Ehv 26 degrees
Ehv 44 degrees
-50
70
-
1
(deg)
Ile = lz -30
.70
--
0
.20
-40
t
Ehh 0 degees
-- Ehh 219 degrees
Ehh 44 degrees
.-00. Ehh 58 degrees
+
. . .. ..-. . - --.- -. .- -
Polar An"1
A variance
-
0
--
00
40
(deg)
-
.-... Ehv 56 degres
-
-e o - -.
-
.-
..-.-.
Ehv
-Ehh
-..-.--...-.--.-.-.----.-.
-.--.-.-.-.
0.
dogrews
...
Ehh 56 degrees
-50
-.
40
lp = z= 20A. varkancs
Ehh
-
0
-2
0=iz = 20S, varlance=0.1
-
.
5e
. ... . .
-40
degrees
Ehv 26 degrees
Ehv 44 degrees
Ehv degrees
. . .. .. . . .
. . .. . .
20
-20
Polar
Angle
(deg)
Figure 5-14: Random Media Bistatic RCS, HH Incidence, 6 = 0.1E
108
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
p=-z=
10 Ava1an=0.1,
p=lz=10.varlnce=00.
Evv 0 degrees
Ew 26 degrees
-30
Ev 0 degrees
Ev 26 degrees
Ev 44 degrees
EVV 44 degrees
Ew 56 degrees
..-.-
-
E 56 degrees
-... -.
-70 . .. . . .. .-.
..- ...- ..-..
-40
..
.-.
.-..-70
-50
-
-00
-- -.----.--..--. ---
.....
-40
0
-20
Polar
=
=
20
0,
40
Variance
-
=
-so
-
0.1
,
-
-... -..
. -.
.-.-.
.--..
. .-.-.. .
..
-.
-40
(dog)
Angie
20
-40
.
o
Polar Angle
-20
lp = tz
.50
= 20
0
40
20
(dog)
wrdance
4,
Evvo degrees
q-
Ew20degrees
Ew 44 degrees
Ew 56 degrees
...
-
=0.1
-
E
Evh 0 degrees
Evh2edegrees
Ev 44 degrees
Eh 56 degrees
-70
.40
--
-
-
-
.....
'I...
..
-80
-
I
-90
0-70
-00
-40
-20
Polar Angle
0
100
20
40
00
-60
(deg)
lp=lz=30A.vadance=0.1
-20
Ew
-00
Evv 56 degrees
-40
--
. . . . . . . . . . . .. . . . . . . . . . . ..
-40
-20
0
Polar Angle
....
20
(dog)
40
00
.90 . .
400
-60
-
--
-
-
-
.
Evh 0 degrees
EVE 26 degrees
EV-- 44 degrees
Ev 56 degrees
-40
-..
.. . .
.. . . .
...--....
-70
Angle
*
Ew 44 degrees
.30
-W
Polar
--
0 degrees
w 26 degrees
-
.....
-70
-20
-40
lp=lz=30A.variance=0e
-
-
-
..... ... .. . .... .
-20
0
Polar
Angle
20
(dog)
40
Figure 5-15: Random Media Bistatic RCS, VV Incidence, 6 = O.e
00
0
(deg)
20
5.2. BURIED OBJECT
109
Ehh
Evv
-10
-10
......-. .- .--
-20
- - - -.-.-
--
p = lz = 10 A = 0.1 E
p=lz= 10A 0=0.25E
lp=lz=30 A =0.1
lp=lz=30A, 6=0.25 E
- -. I -... . - .
. . . -...-.
-.-
*30
*
.
Ip=Iz
.- .- .
-20 k
-30
-----
. .
-40
=
lp=lZ=
104A6=0.1 E
104A6=0.25E
Ip=lz=304 A=0.1 e
lp=lz=30 A, =0.25E
- - --
-- - - - - - - - -- - - - -- - - -
-40
--
-~ -.~-.
...
.-.
.-.
..--.. ---....- .......----..--
-50
-0
- - - -....
-
-
-
-
-
- -
-
-
-50
0
10
20
30
Polar Angle (deg)
Ehv
060 -80 0
50
40
-
7
10
20
30
Polar Angle (deg)
40 50
60
70
Evh
-20
-20
1p
- - -
- ....-........... - - -
-30
-.-.-.-
=
tz = 10 A,
6
=
0.1 E
lp=z= 10 A, =0.25 E
lp = lZ = 30 A 6 = 0.1
lp = lz = 30A S = 0.25E
-40
-- - -
E -30
......... . .......
........
.
.......
.
.
=..
IP= lZ =
A
0.1
E
10 8 =
lp = lz= 10 A 8=0.25 E
p = 1Z = 30 A = 0.1 E
lp=Iz=30A 6= 0.25E
-40
-50
-50
... .... .................... .
. . .. ........
...........
-60
- - -
--
---
--
-- --
-70
--
-60
-70
.80
-7
-
-
- - - - - - - --
-80
0
10
20
30
Polar Angle (deg)
40
50
60
75 090
70
'
0-
10
20
30
40
Polar Angle (deg)
Figure 5-16: Random Media Monostatic RCS
50
60
70
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
110
part of the permittivity is left constant. Having studied the effects of different statistical
parameters for the real permittivity fluctuations, we only examine a medium that has a
variance of 0.25o- (mean conductivity) and a correlation length of 30A. This variance is
chosen because we expect the conductivity to have larger fluctuations than the permittivity
for given moisture profiles [19]. In addition, the conductivity fluctuations have a smaller
impact on the scattered fields, and the RCS cannot be measured with the current technique
for small variances and correlation lengths.
When the variance is
0.250-, a very small
percentage (2.7 x 10-%) of the cells in the FDTD domain have a conductivity that drops
below zero, so these are truncated (i.e. become lossless). Figure 5-17 shows the bistatic
RCS from one realization of the random medium, again for both the cross-polarized and copolarized cases. The scattering from this medium is much smaller than that of the medium
with fluctuating permittivity given the same statistical parameters. Figure 5-18 shows the
monostatic RCS return, for cross-polarized and co-polarized scattered fields. Note again
that the HV and VH RCS returns are identical, verifying the reciprocity of the system.
The co-polarized fields are similar in shape to the fluctuating permittivity medium with the
same parameters, but are much smaller in magnitude. From these results we see that for
a given inhomogeneous moisture profile (i.e. 2.5% - 5%), the fluctuations in conductivity
contribute much less to the random medium scattering than the permittivity fluctuations
(real part).
5.2.2
Object in Random Media
We now study the effects of the random media on the RCS of a buried object. Three types
of random media will be studied, henceforth referred to as type 1 (l = 1z = 10A, J = 0.1,E),
type 2 (l = 1, = 30A, J = 0.1c), and type 3 (1, = 1, = 30A, 6 = 0.25e). The conductivity of
the media will be left constant. The object is placed at a depth in each medium such that
the random medium scattering amplitude is on the order of the object scattering amplitude.
As a result, the RCS from the object will be obscured by the clutter of the random medium.
Monte Carlo analysis of the RCS for an ensemble of random media (100 realizations) will
5.2. BURIED OBJECT
lp Iz
=
111
30 A variance
025 o
-
-20
-.-.-...---.-.-.
...-..
Ip =
-10
-10
Ehh 0 degrees
Ehh 26 degrees
Ehh 44 degrees
Ehh 56 degrees
Iz= 30 A, variance = 0.25 a
- vv- 0 degrees
26 degrees
-44 degrees
w
w
......-..
-
-20
...
--.
- *Ew
-.
56degrees
.
-30
40
cc
-50
-7-60
-60
-40
-20
lp =
-50
0
20
Polar Angle (deg)
Iz= 30 A, variance = 0.25 a
80
40
.70
-eo
-40
Ip
-50
Ehv 0 degrees
Ehv 26 degrees
Ehv 44 degrees
Ehv 56 degrees
-60
-70
-20
=
0
20
Polar Angle (deg)
z = 30 A variance = 0.25 a
-
40
.Evh
- -
.
-60
.
60
0 degrees
Evh 26 degrees
Evh 44 degrees
Evh 56 degrees
-70
..
........
.. ..
. ....
480
40-4
.-...
-30-
-
-..
0
-
-
0 ..
3 . ...
.0.
. ...
. .
..
. . ..
40--
6-0
3
....
..
~ .......
~~
..~
... .... ..... ..... .. ..
-90
-90
-100
-W0
-40
.20
0
Polar Angle (deg)
20
40
60
- --
-W0
-40
-20
0
/
20
Polar Angle (deg)
Figure 5-17: Random Media Bistatic RCS, 6 = 0.25o, l, = 1, = 30A.
40
so
112
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
lp lz
30 A variance
0.25 a
*10
Evh
-20
-----
---
-30
Ehh
y
-40
-50
-80
Kq
-70
-80
0
_
_.. 1 .
10
1
20
30
40
Polar Angle (dog)
60
50
70
Figure 5-18: Random Media Monostatic RCS, 6 = 0.25-, l = l2 = 30A.
be performed to enhance the bistatic RCS return of the object for normal incidence. The
object chosen is a PEC rectangular object, 20 cm x 20 cm x 8 cm in size, buried 0.685 m
below the surface. The Monte Carlo averaging is performed for the coherent part and the
incoherent part of the RCS, as follows:
RCScoherent
=
[
10 log 47r
E(9)>2 12]
(< E,( )2
RCSincoherent=
>
10 log 47r>
s6
I <E() >
-
2
12)1
(5.1)
The coherent component of the RCS is from the scattering of the object alone, which is
constant over each realization. The incoherent component is the scattering from the random
medium contributions, which varies over each realization.
The coherent RCS averaging
therefore should remove the incoherent part of the RCS, leaving the scattering due to the
object alone. The incoherent averaging produces the variance of the scattering caused by
the random medium contributions. The following pages contain the results for each type
of random medium, separated into co-polarized results, cross-polarized results, and the
5.2. BURIED OBJECT
113
convergence of the results for the coherent averaging.
Figures 5-19 and 5-20 show the Monte Carlo results of the object buried in a random
medium of type 1. The co-polarization graph shows the coherent average RCS, incoherent
average RCS, the RCS of the object in the homogeneous (mean) medium, and the RCS
of the object in one random medium realization.
The RCS of the object without the
random fluctuations present show that the maximum return at the backscattering angle (0
degrees) is -28.7 dB, and that the RCS response clearly tapers off with increasing angle of
observation. The RCS for the object in one realization of the random medium shows the
distortion caused by the permittivity fluctuations. In this case, the fluctuations will likely
not mask the fact that the object is present (apparent from the magnitude of the return),
but will still distort the RCS response. For the HH field, the maximum distortion caused
by the random medium is 5 dB, while the maximum distortion in the VV case is 3 dB. The
coherent averaging eliminates the RCS contribution of the random medium, clearly showing
the RCS of the object alone. For this random medium, the coherent averaging is very close
to that of the object alone, deviating less than 1 dB in the worst case. The incoherent
averaging shows the variance of the scattered fields of the random medium, in this case
a maximum of -40.5
dB, or 11.83 dB below the scattering from the object itself. The
cross-polarized RCS graph shows the scattering of the random medium for one realization,
and the variance of the scattering (incoherent average). The object does not contribute to
the HV and VH scattered fields, so these are on the same order. For the same reason, the
coherent part of the cross-polarized RCS is much lower than the incoherent part. In this
case, the coherent average RCS return for the cross-polarized fields is between 15 and 30 dB
down from the incoherent average. Finally, the convergence graphs show the RCS coherent
averages over random medium realizations for the co-polarized and cross-polarized fields, at
three different scattering angles. The co-polarized fields converge very quickly in this case,
while the cross-polarized fields continue to drop to the noise floor (again, in the limit of an
infinite ensemble without noise, they should go to zero).
Figures 5-21 and 5-22 show the TE and TM Monte Carlo results for the object buried
114
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
in a random medium of type 2. From the previous section, we expect the scattered fields
from the random medium to be larger in this case, due to the longer correlation length.
Comparing the co-polarized RCS for the object with and without the random fluctuations
present, we see that the maximum distortion caused by the random medium is 11 dB for the
HH case and 6 dB for the VV case. In addition, the incoherent return for the co-polarized
RCS is only 3.1 dB down from the RCS of the object. In other words, the variance of the
RCS contribution from the random medium is approximately half that of the RCS from the
object alone. With these large fluctuations, determining the presence of the object in this
medium would be difficult. The coherent averaging of the co-polarized RCS reconstructs the
profile of the object quite well, with a maximum deviation of 1.5 dB. The averaging results
are not as good as the previous case, due to the larger scattered fields and greater statistical
error shown in Figure 4-5. In addition, there are errors caused by the finite-domain, which
in this case is only slightly greater than two correlation lengths in all directions. The crosspolarized RCS incoherent and coherent averages are also shown, with the coherent average
15 to 25 dB below the incoherent average. Again, the coherent cross-polarized RCS average
is expected to be very small as the object alone does not contribute to any of these fields.
The coherent average of the cross-polarized fields does not reach the level of the type 1
medium, settling instead at a higher noise floor. The incoherent average is again on the
order of the cross-polarized scattering from one random medium realization, as expected.
The convergence graphs show that the RCS responses converge somewhat slower than the
type 1 medium, and the coherent average of the cross-polarized fields converge to a noise
floor approximately 10 dB higher.
For comparison, Figures 5-23 and 5-24 show the TE and TM Monte Carlo results for
the type 2 medium with no object present. From these graphs we can see that the coherent
averaging for the co-polarized fields results in an RCS which is 15 to 25 dB lower than
the incoherent part. With no object present, we would expect the coherent average to be
zero, but again the limitations of the simulation affect the results. In this case, not only
do the finite domain and random medium generator contribute to the error, but also the
5.2. BURIED OBJECT
115
noise floor of the simulation itself, which as mentioned above is approximately -45 to -75
dB for the co-polarized fields (the noise floor is a coherent return). The incoherent average
of the cross-polarized fields is smaller when the object is not present, because there are no
longer any object-random medium contributions to the scattered field. The convergence
graphs show the coherent averages dropping to the noise floor in both cases, and indicate
that further random medium realizations would improve the results.
Finally, Figures 5-25 and 5-26 show the Monte Carlo results for TE and TM waves for a
medium of type 3. In this case, we can see that the incoherent average of the co-polarized
field is approximately 5 dB greater than the RCS of the object alone. In other words, the
variance of the random medium RCS is 5 dB greater than the RCS of the object. Detecting
the object in this environment would be very difficult due to the relatively large scattering of
the random medium. The coherent average of the co-polarized fields does not converge well
to the object RCS, with an approximate 2.5 to 10 dB difference in magnitude. The shape is
close to the object RCS at larger observation angles, but diverges greatly between -20 and
40 degrees. However, compared to the RCS of a single random medium realization, or the
coherent average without the object present, it is still noticeable that the object is present.
The coherent average of the cross-polarized fields is less than the incoherent average by 7 to
20 dB, converging to a larger noise floor than the type 1 and 2 media. This is again due to
the larger correlation length, as well as the larger errors in the random medium generator.
Finally, the convergence of the coherent averages is much slower than the type 1 and 2
media, with larger fluctuations.
The Monte Carlo results presented in this chapter are somewhat theoretical in nature,
as one observes only one random medium realization in practice. The averaging techniques
do well to characterize the random medium scattering in terms of variance, but cannot be
applied to real world detection. The closest type of observations one could make would be
to shift the observation beam around the target to obtain independent, yet still somewhat
correlated, medium realizations [47].
In that case however, the object would be shifting
position as the observation beam was moved. Other techniques, such as the angular cor-
116
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
Co-polarization
Croe-polarization
-10
30
Coherent Average
Incoherent Average
One Realization
No Random Media
---.-.
-
-20
-
-40
*.-.-.-.-.-.-.-.-.-.-.-.-.-.-....-
Coherent Average
Incoherent Average
O ne realization
--- _
- -
--0
0
-7
-30
.... ..... .
-- . .-. . -.-.
-80
(0
-40
--
-
-. -
- -
-.- --.-.-.
.-.-.
-.
..
-.- - - -
. . ..
-..
- .- . .-
--
- -.
.....
.. -...
-
-.-..-...... .. .
-.-
-.
- - -
0
-.
00
-.
-9
.
.. .- . .-.
-.--
-.
-.
-0
-1
-60
-40
-60
0
-20
20
40
Polar Angle (dog)
Ensemble Averaging Convergence, Co-polarization
-
-
- -. - -.-.- -
ao
-.-.-
.-.
. . . .
-.-.
.
..
-.-.- .
20
40
Polar Angle (dog)
Ensemble Averaging Convergence, Cross-polarization
-30 degrees
0 degrees
30 degrees
-
60
-30 degrees
0 degrees
30 degrees
-25
-50
6 -30
-.
0-35
-.
...
...
--.----.
. ...
-.--...
-. -...
- - ..
- .. .....
6 -60
.-..
- ......
-
---
-40
-70
-0
-..
.
.--
--
-..
--.-
-
---.-
. .. ..
-.. .. .. .. ..
-0
50 1
0
10
20
30
40
50
realization
60
70
I-
80
90
100
0
10
20
30
40
50
00
...-.
-. -
... .. .. . .. ..
70
80
90
100
realization
Figure 5-19: Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 0' incident angle, l, = 1, = 10A and 6 = 0.1c. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles.
5.2. BURIED OBJECT
117
Co-polarization
-10
Cross-polarlzatlon
-30
Coherent Average
Incoherent Average
One realization
No Random Media
-- -
-20
-
..-.-.-.-.-.
-40
-..-.-.-..-...-.
--
-
-
-- - ------
.-.-..
-
Coherent Average
Incoherent Average
One realization
-
-
-.
. ......-. .-.
....
-60
- -..
.
-
-7
-50
-30
-
- ...
..-..
-....-- ...-70
---
en
-40
-80
-90
-so
-100
-0
-40
-60
-20
-110
60
-20
0
20
40
Polar Angle (deg)
Ensemble Averaging Convergence Co-polarization
-60
-40
-40
-
-
-25 -
-
-30
-
--
-30 degrees
0 degrees
30 degrees
-
-
-.--
-50
..........-.-.---
..
- -
-..
A--- -.
-
...
0
-.
.......
-4
5
....
. . . . . . . . . .. .-.......
. . ..
...
.....-. .--.- .. .. ... .. ... -
----...
-..
.........-.-........ ---..-..-.......
...
-. --.-....
----.
-.-- -.
-.
-4
.......
. ........ ....-.
-50
10
20
--...--
30
40
-...
. ..
-..
.-..
. - - - -- - -. -... --.. - -..--
50
Realization
50
70
80
90
100
-..
-.
-.
..
-80
. ... .
-.. .... .. . .. . .
-- --. -....--
-30 degrees
0 degrees
30degrees
-
(0-70
.........-
...-.......
...
-----
-60
-
W
0
a:
-35 -
6
0
-
-
--
0
-20
2
40
Polar Angle (dag)
Ensemble Averaging Convergence Cross-polarization
.
-....
-.. ... .. . .. .
-90
-100
10
20
30
40
so
Realization
60
70
80
90
100
Figure 5-20: Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 01 incident angle, l = l = 10A and J = 0.1E. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles.
118
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
Cross-polarization
Co-polarization
-10
-30-
Coherent Average
Coherent Average
Incoherent Average
One realization
No Random Media
-
-20
-30
--.-.
-
....
...
.......
. ..................
.......
-7-
-.
..
..
---2-0
...-.-.
.-..
00-----.
- - -. ---.
-40 -.
-.
~ ~~~~
- - ~~ ~-.-.-.
-50
......
-60
-60
.20
-40
i
|
-
.. ..- -
- -
60 -110
-
- -
.-
-.
-
-
-20
0
20
Polar Angle (deg)
Ensemble Averaging Convergence, Cross-polarization
0 degrees
-
30 degrees
-- -
-
.
---
-
-
-
-
-40
-40
-
-
-60
40
-30 degrees
.'- .-
.... - ..- -
..
-..
....
- - ..-..-.-- ..-......-.-.- ..-.- ... -.
.-. -
40
---
-.
.-
--.
-30
-3 5
-90
I
- . . -.-.
-.-..
. .-..-.--.--.
..-..
-.-....-. .-.
. .
-.
---.
.......
-100
-2 5 -
-0
. ......
20
P20 0
Polar Angle (dog)
Ensemble Averaging Convergence, Co-polarization
I
..-
..--..-..- .-
-.
-.--
.....
-70
- 0-
..20....
--
-
-40
One realization
.---.
.
-
- - - - ----
-50-
-40
Incoherent Average
- - -
-40
-
- ---
-
-30 degrees
0 degrees
30 degrees
50
--60
-.
---.
-70
- -.
.. -.-.
.
-.-.-.-.-. -.. .....
--~-.-.
.-
- ..-.-.- .
..-.
- ..-.-- ....-.....-....- .-.-.-.-.- - ....-...-
----- --
- --
8 -80
-45 -
-
60
~
-
- -. ~-- - - . -.
.-
-- . .
-90
10
20
30
40
50
realization
70
60
80
90
100
10
20
30
40
50
realization
60
70
80
90
100
Figure 5-21: Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 0 incident angle, 1, = 1, = 30A and 6 = 0.1E. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles.
5.2. BURIED OBJECT
119
Co-polarizaon
Cross-polarization
-e
-
----
-4
0
Coherent Average
Incoherent Average
One realization
----
Inoherent
One realization
No Random Media
-40
-so
.-. -..
. -.
- .. ...- - - ... . ..
- - .. .
-50 -....
0- -
-2
Coherent Average
Average
- -
-
- --
...
--.-.-.-..--.-.-.-
-
-.
.-.--.-.--
-...
- -.-.-.-.
-7
0
-
-10
0
-.
-.-- -
. . .- -.. .
. . -. -.
-.-.- -
-
..-.
...-.-.-.-
.
Cc
-60
-40
0
-20
110
so
20
40
Polar Angle (dog)
Ensemble Averaging Convergence, Co-polarization
-.
-. -.
-60
-40
-.--
- -.
.. . . ..- .- . .
.
0
-20
Polar Angle (deg)
.
60
40
Ensemble Averaging Convergence, Cross-polarization
-30 degrees
-30 degrees
----
0 degrees
30 degrees
degrees
-- - -
30degrees
-25
-50
..- --
-
E -30
-35
......
-40
---.
----
-..... -60
. ......--...............
-
---
---.
.-.....
-- -- -
-- - -
-.............. ..-.-.
- - -
-
-
-70
. .. .....
-.
--. --.-.....
-.-...
..-
-
-80
-
-
-45
-50
20
.
-
-
-
--- -w
-90
10
20
30
40
so
Realizaton
60
70
50
90
100
-100
10
20
30
40
50
Realization
60
70
s0
90
100
Figure 5-22: Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 0' incident angle, 1, = 1, = 30A and 6 = 0.1L. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles.
120
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
Co-polarization
-10
Crosspoarization
-30
Coherent Average
Incoherent Average
One realization
Coherent Average
Incoherent Average
One realization
-40 -.. ....
..- .
-50
.-.-..
. .-..
- - -
-
.....- ..-
-
-
-20
---
- --
- -
- -7
-60
-30
-- -.
.-.-.
....... ............ ..-..
..-. .
..
.. -.
... .....-... ....................
-70
-40
-80
-..
-.-.
.... -.---...... -.-. ..
. - -.-.-.--- .-- -.-.
.--
-50
......
-. -.
..
-.
.
-1001
-60
-40
-0
-20
0
20
40
Polar Angle (dog)
Ensemble Averaging Convergence Co-polarization
0
-110
-40
-60
-.-..
-.-.-.-.-..-- -- .- -
-40
20
-30 degrees
-25
-
-
.......
.
...--..
-.......
0 degrees
-
-
30 degrees
--.
-5
0
-.. ..- . - .- -00
..-.....-.
-.
- -.-.-. .
-~~.
-35
-40
0
- -
-
.
-
--- + 10
20
--
-30 degrees
0 degrees
-
-
3odegrees
- - - -
-
- .
-
- ...-..-
..
- -.
. . .. .. . .. . . ... . .
I
x
--
-
-
. . .
-
-
'IV
J
\
..... ..
.
-55
-
-. . ..
I.
\
-50
-
-
g-0-
-45
- -
-60 -- -----.
. ... ..
--- .......
-.
-. .... .
-7
---
-30
-60
60
.20
0
20
40
Polar Angle (deg)
Ensemble Averaging Convergence, Crose-polarization
-
20
-
-\
40
.
-- - - -
00
realization
-
-
-so
--
-
i
1
70
. . . .
. . .
. . . ... . . . . . .
.. . .
- -i0
00 1
-100
10
20
30
40
00
realization
60
70
00
90
100
Figure 5-23: Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 0' incident angle, 1, = 1, = 30A and 6 = 0.1c. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles. No object is present
121
5.2. BURIED OBJECT
Co-polarlzation
Cross-polarization
-10
-30
-
-20
0
- 2.
-40
-.
Coherent Average
incoherent Average
One realization
No Random Media
0
---
20
-
0 -'- -
-- - -
. .
-.. ...-
. -.
. -.-
--.
... .--.-
-
-
-
One realization
0
--.-.-
.--.-.
- --.-- -.-. - -. .-.
- ..
.-.--
.-.-.-
-.-- --
-
-
-7 0
-.
- .- .- .-
-.
-.-.-
. .. ... .. . ... .......
---.
....
- -- -- - - - -
-8 0
-10
-40
0
60
20
40
P20 0
Polar Angle (dog)
Ensemble Averaging Convergence, Co-polarization
-
. -
..
-60
-40
-
-
-
.
-.
.
--
- -
--
-
--
-- -
. -.
-
- -
-.
.-.-. --.
60
-20
0
20
40
Polar Angle (dg)
Ensemble Averaging Convergence. Croes-polarizaton
-40
-20
-30 degrees
0 degrees
30 degrees
-25
-
--50
-30
-
- --
-
--
-.
60
-60
-*
--..
-5
-3
Coherent Average
Incoherent Average
--
-
-40 --
.
. ....-.
-.
-.--. - --
-
-- - -
.-.
--.-.---- ---
--
-
-30 degrees
degrees
30degrees
-
--.
-.-
- --..--..
-.-- ..
- -----.
...-.
-.-.
-35
...-.
.
-. -. -.
..
-.-.-.
.-.-.-- .
...
-.-
..
S-70
.40
.......
...............
.---
....-
.....
-. ... ..... ........ .
-45
-80
-.---
....... -.-.....
-- - - --.
.........
-50
. .. -.
.-- ...-- . -.
..--
.-.-- --.-
..
---.
-90
-55
-00
10
20
30
40
50
60
Realization
70
80
90
1 00
-100
10
20
30
40
50
80
70
80
90
100
Realization
Figure 5-24: Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 00 incident angle, l = 1z = 30A and I = 0.1c. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles. No object is present
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
122
Co-polarization
-10
Cross-polarization
-20
-.-.-.
Coherent Average
Incoherent Average
One realization
-
No Random Media
---
-20
--
-40
-50
--- --- ----
-30
---- -
-60
Q0 -70
--
- - -
--
-
b- -- -
cc
-40
-80
400
.
-g0
-
. .-
-
____
-
-
-n5
Coherent Average
Average
Incoherent
One reaizaton
-100
-40
-60
20
-2
-20
-20
-110
60
40
Polar Angle (dog)
Ensemble Averaging Convergence. Co-polarization
40
-60
-30 degrees
0 degrees
---
-
degrees
30 degrees
-30
- -
60
-20
0
20
40
Polar Angle (deg)
Ensemble Averaging Convergence, Cross-polarization
--
---
40-30
- ...-....--
-40
-- ---.
--.
..-
---
0 degrees
30 degrees
.....
- -..
-0
-80
-
-40 ~.10.'.
~i~l
Ill
... ...-.--.
. ......---.-- --.-.
......
.-
-..-.-.-.--.-.
...........
-..-.
-
-.--.-.-.
-90
--on
.1
-no
-
-/-.
II
ii
-45
-..-.... ......... . -.
-...
- -
I.
10
20
30
40
50
realization
60
70
o
90
-100
10
20
30
40
50
realization
60
70
80
90
100
Figure 5-25: Monte Carlo random medium ensemble averaging. Bistatic RCS for TE wave
at 0' incident angle, l, = 1, = 30A and 6 = 0.25E. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles.
123
5.2. BURIED OBJECT
Cross-polarization
Co-polarization
10-30
--
-
.... . . . .. . . . . ...-.
. .
0
-
-.- - -
- -
-
-.-.
-4-.
.20
--
-
-
70-
-
-
-
- -
- -
-
-
- 4--
-
0
-2
Coherent
S
Incoherent
Coherent Average
le
-nIncoherent AverageEn-e--
-50
. .. . ..
-.
------
-...
-
-60
6C
0
-20
-40
0
One realization No Random Mdia
-1
00
0
0
0
-110
1
0
-
30
-4
0
-20
Averaging Convergence, Coolarizaton
Ensemble
- 140
30
M
- .
1 5
.4
0
-4
5 -.-.
-50
-
---.
-
.- - .
10
. 70
... .
-
30
. . . . .- --.. .
.--..
-..-
40
50
Realization
.
-
60
-
--.
-.. .
70
80
-.. .
-
90
-
100
100
0
degrees
-
. . . . ..-. .- -..
x
-
-
- -. . . . . . . - -
. . . . -.- -.- -.-.
-..
. .-.-- -
10
. .
-
-. .
. -
---.
30
40
-8
-9
. ..- . . . .- .- .
20
- -. -. . - -.
60
30 degrees
-
-.
- --. -
. ...- -
-6
-
-
0 degrees
---
-
-
-ng
...-
. -.
-.
. -
20
50
....
-.--...----
-
s
le--...
---....
Average
0
--
ve
Average
zt
Averaging Convergence. Cross-polarizaeon
C30
-30 degrees
0 degrees
- 30 degrees
- -25
-- Onr
-
00
60
Polar Angle (deg)
Polar Angle (dog)
Ensemble
v
. - . . . . . -. . . . . - -. . . . -.-.-.-.-.-. .-.- -. -
- -
. .-
-v-g-
50
Realization
0
0
--
- . . . . . -
. . . . -
60
70
. . . . -. -
80
90
-
.-.- -.--
. .-.-
-
100
Figure 5-26: Monte Carlo random medium ensemble averaging. Bistatic RCS for TM wave
at 0' incident angle, 1P = 1, = 30A and 6 = 0.25c. Coherent and Incoherent averaging for
co-polarized and cross-polarized waves, including convergence of coherent average for three
bistatic angles.
- -
.
- -.-
-.--
.-
. . . . .- . . . - --.
- . ..- . .-- -. . . . . -
124
CHAPTER 5. NUMERICAL RESULTS AND ANALYSIS
relation function [48], are apparently not well suited to this problem due to the geometry.
The depth of the object would result much different paths for the incident and specular
radar returns for different observation angles, resulting in different attenuation factors. In
addition, the object in this study is not spherical or cylindrical, and would therefore not
exhibit a high degree of angular correlation. Techniques such as simple frequency averaging
have been attempted, but without success at this point. In the case of frequency averaging,
each frequency has a much different penetration depth and object RCS, and as such are
not correlated well. Further studies can be undertaken for shallow, spherical objects to
determine if other post-processing techniques are successful in increasing the probability of
detection.
Chapter 6
Conclusions and Future Work
A three dimensional FDTD simulation has been presented to model the electromagnetic
scattering from objects below random media.
Two random medium models have been
considered.
Using the first model, the simulation can calculate the scattered fields of arbitrary objects under various types of foliage. The foliage is modeled as a uniaxial effective permittivity
using strong fluctuation theory. The monostatic RCS and bistatic RCS for a PEC cube and
a PEC cylinder under a foliage layer were studied. Although the depth was limited by our
present computational resources, larger studies in the future could easily be implemented
as faster computers become available. The effects of the random medium on the scattering
from these two types of PEC targets were determined for TE and TM incident waves.
The second model was used to describe an inhomogeneous soil as a spatially fluctuating random permittivity with a prescribed correlation function. The monostatic RCS and
bistatic RCS of various types of random media for TE and TM incident waves were studied to determine the effect of the permittivity fluctuations, conductivity fluctuations, and
correlation lengths. The larger correlation lengths increased the magnitude of the random
medium scattered fields, as did the larger material fluctuations. The effect of the random
media on the RCS of a buried object was also studied. Monte Carlo averaging was performed on three types of random media with and without an object present for bistatic
125
CHAPTER 6. CONCLUSIONS AND FUTURE WORK
126
RCS (normal incidence). The random medium parameters were chosen for cases where the
object was clearly visible in the clutter, barely visible, and completely hidden. Coherent
averaging was used to closely reconstruct the RCS profile of the object in the homogeneous
medium, although accuracy was better for random media with smaller fluctuations and
correlation lengths. The incoherent averaging was used to determine the basic statistical
properties of the random medium scattering, e.g., the variance of the random medium scattered fields. By studying the convergence of the averaging, the noise floor of the simulation
was determined. This noise is due to the finite size of the FDTD domain, small errors in
the random medium generator, and likely the discretization of the medium itself. For the
geometry under consideration, that of a small PEC cube buried 0.685 m below the surface,
initial studies of other post-processing techniques found them not effective in reconstructing
the RCS response.
Future work could include larger simulations as greater computational resources become available.
These computational domains could provide greater resolution for more
accurate results, or larger physical simulation size for larger problems (i.e. more detailed
forest). Greater resolution would allow one to study the phase fluctuations of the foliage,
which are on the order of a A/50. The various limitations of the FDTD model could also
be addressed, from the numerical dispersion of the scattered field to the sensitivity of the
Huygen's surface. The discrete formulation of the total/scattered field technique can also
be improved, to compensate for the error caused by the approximations made in the reflection and transmission coefficients. For the continuous random medium case, the larger
computational domain could also be used to study the effects of truncating the permittivity fluctuations.
As mentioned in Chapter 5, with a larger computational domain, a
spatial filter could be applied to the random media to minimize possible reflections in the
abrupt fluctuations truncation. Another approach to overcoming the finite domain error
could use a tapered incident wave whose beam-width is confined to the random volume.
The effect of the random media in specific applications could also be studied further; for
example, a simple SAR algorithm could be used to reconstruct the image of the target,
127
with and without a random medium present, thus quantifying the detrimental effects of the
inhomogeneous medium. The GPR simulation could also be extended to include a random
rough surface in addition to the random soil, thus providing a more comprehensive model
to predict buried target return. Implementing the rough surface into the FDTD technique
would not be difficult, and would be quite accurate if a conformal technique is used. For a
more rigorous broadband GPR simulation (for short pulses), the FDTD simulation should
also take into account the dispersive nature of the soil using a Lorenz or Debye model.
This would allow accurate measurement of scattered fields over a wide band of frequencies
in a single simulation, thus exploiting one of the key advantages of the FDTD technique.
Finally, it would be useful to collect some geophysical data on the profile of various types of
soil, so as to obtain better knowledge of their statistical properties, e.g., correlation lengths
and permittivity variances and how they change with frequency, moisture content, etc. Implementing all of these improvements in the existing simulation model would result in an
extremely accurate and comprehensive model of electromagnetic scattering from objects in
or below geophysical media.
128
CHAPTER 6. CONCLUSIONS AND FUTURE WORK
Bibliography
[1] L. Tsang and J. A. Kong, "Microwave remote sensing of a two-layer random medium,"
IEEE Trans. Antennas Propagat., vol. 24, no. 3, pp. 283-288, May 1976.
[2] M.Z.M. Jenu and D.H.O. Bebbington, "Two-dimensional modelling of optical propagation in turbulent atmosphere," Electronics Letters, vol. 29, no. 9, pp. 769-771, Apr.
1993.
[3] A. K. Fung, "Scattering from a vegetation layer," IEEE Trans. Geosci. Elec., vol. 17,
no. 1, pp. 1-6, Jan. 1979.
[4] F. T. Ulaby, R. K. Moore, and A. K. Fung, Microwave Remote Sensing: Active and
Passive, Artech House, Boston, 1981.
[5] R. G. Atkins, Microwave Scattering and Synthetic Aperture Radar Imaging of Targets
Buried in Random Media, Ph.D. thesis, Massachusetts Institute of Technology, 1993.
[6] M. Borgeaud, R. T. Shin, and J. A. Kong, "Theoretical models for polarmetric radar
clutter," J. Electromagnetic Waves and Applications, vol. 1, no. 1, pp. 73-89, 1987.
[7] A. Taflove,
Computational Electrodynamics: The Finite-Difference Time-Domain
Method, Artech House, Boston, 1995.
[8] K. S. Yee, "Numerical solution of initial boundary value problems involving Maxwell's
equations in isotropic media," IEEE Trans. Antennas Propagat., vol. 14, no. 3, pp.
302-307, Mar. 1966.
129
BIBLIOGRAPHY
130
"Subsurface detection based on
[9] S.E. Shih, K.H. Ding, Y. Zhang, and J.A. Kong,
enhanced sar signatures using angular correlation function," in Geoscience and Remote
Sensing Symposium Proceedings, 1998, 1998.
[10] T. J. Cui and W. C. Chew, "Fast evaluation of sommerfeld integrals for em scattering
and radiation by three-dimensional buried objects,"
IEEE Trans. Geosci. Remote
Sensing, vol. 37, no. 2, pp. 887-900, Mar. 1999.
[11] H. Brunzell, "Clutter reduction and object detection in surface penetrating radar," in
Radar 97 (Conf. Publ. No. 449), 1997.
[12] D. A. Hill,
"Electromagnetic scattering by buried objects of low contrast,"
IEEE
Trans. Geosci. Remote Sensing, vol. 26, no. 2, pp. 195-203, Mar. 1988.
[13] S. Vitebskiy, L. Carin, M. A. Ressler, and F. H. Le,
"Ultra-wideband, short-pulse
ground-penetrating radar: Simulation and measurement,"
IEEE Trans. Geosci. Re-
mote Sensing, vol. 35, no. 3, pp. 762-772, May 1997.
[14] T. Dogaru and L Carin, "Time-domain sensing of targets buried under a rough airground interface," IEEE Trans. Antennas Propagat., vol. 46, no. 3, pp. 360-372, Mar.
1998.
[15] J. Bourgeois, A Complete Three-Dimensional Electromagnetic Simulation of GroundPenetratingRadars Using the Finite-Difference Time-Domain Method, Ph.D. thesis,
Georgia Institute of Technology, 1997.
[16] L. Tsang and J. A. Kong, "Multiple scattering of electromagnetic waves by random
distributions of discrete scatteres with coherent potential and quantum mechanical
formulism," Journal of Applied Physics, vol. 51, pp. 3465-4385, 1980.
[17] K. O'Neill, R. F. Jr. Lussky, and K. D. Paulsen,
"Scattering from a metallic object
embedded near the randomly rough surface of a lossy dielectric," IEEE Trans. Geosci.
Remote Sensing, vol. 34, no. 2, pp. 367-376, Mar. 1996.
BIBLIOGRAPHY
131
[18] Y. Miyazaki, J. Sonoda, and Y. Jonori,
"Statistical analysis of electromagnetic scat-
tering of buried objects in random media using FDTD method," Transactions of the
Institute of ElectricalEngineers of Japan, Part C, vol. 117-C, no. 1, pp. 35-41, January
1997.
[19] W. R. Scott and G. S. Smith, "Measured electrical constitutive parameters of soil as
functions of frequency and moisture content," IEEE Trans. Geosci. Remote Sensing,
vol. 30, no. 3, pp. 621-623, May 1992.
[20] B. T. Binder, M. F. Toups, S. Ayasli, and E. M. Adams,
"Sar foliage penetration
phenomenology of tropical rain forest and northern u.s. forest," in Radar Conference,
1995., Record of the IEEE 1995 International, 1995.
[21] J. G. Fleischman, S. Ayasli, E. M. Adams, and D. R. Gosselin, "Foliage attenuation and
backscatter analysis of sar imagery," IEEE Trans. Aerospace and Electronic Systems,
vol. 32, no. 1, pp. 135-144, Jan. 1996.
[22] D. R. Sheen, N. P. Malinas, D. W. Kletzli, T. B. Lewis, and J. F. Roman, "Foliage
transmission measurements using a ground based ultrawide band (300 - 1300 mhz) sar
system," IEEE Trans. Geosci. Remote Sensing, vol. 32, no. 1, pp. 118-130, Jan. 1994.
[23] D. L. Sachs and P. J. Wyatt, "A conducting slab model for electromagnetic propagation
within a jungle medium," Radio Science, vol. 3, pp. 125-131, 1968.
[24] Y. Lin and K. Sarabandi, "A monte carlo coherent scattering model for forest canopies
using fractal-generated trees,"
IEEE Trans. Geosci. Remote Sensing, vol. 37, no. 1,
pp. 440-451, Jan. 1999.
[25] K. Demarest, R. Plumb, and Z. Huang,
"FDTD modeling of scatterers in stratified
media," IEEE Trans. Antennas Propagat., vol. 43, no. 10, pp. 1164-1168, Oct. 1995.
[26] J. A. Kong, Electromagnetic Wave Theory, John Wiley & Sons, Inc., New York, second
edition, 1990.
BIBLIOGRAPHY
132
[27] W. H. Press, S. A. Teukolsky, W. T. Vetterling, and B. T. Flannery, Numerical Recipes
in Fortran 77, Cambridge University Press, New York, 1986-1992.
[28] J. P. Berenger, "A perfectly matched layer for the absorption of electromagnetic waves,"
J. Comp. Phys., vol. 114, pp. 185-200, 1994.
[29] W. C. Chew and W. H. Weedon, "A 3D perfectly matched medium from modified
Maxwell's equations with stretched coordinates," Microwave Opt. Technol. Lett., vol.
7, no. 13, pp. 599-604, Sep. 1994.
[30] F.L. Teixeira and W.C. Chew,
"A general approach to extend berenger's absorb-
ing boundary condition to anisotropic and dispersive media," IEEE Trans. Antennas
Propagat., vol. 46, no. 9, pp. 1386-1387, 1998.
[31] J. Fang and Z. Wu, "Generalized perfectly matched layer for the absorption of propagating and evanescent waves in lossless and lossy media," IEEE Trans. Microwave
Theory Tech., vol. 44, no. 12, pp. 2216-2222, Dec. 1996.
[32] K. Demarest, Z. Huang, and R. Plumb, "An FDTD near- to far-zone transformation
for scatterers buried in stratified grounds," IEEE Trans. Antennas Propagat., vol. 44,
no. 8, pp. 1150-1157, Aug. 1996.
[33] W. C. Chew, "Electromagnetic theory on a lattice," Journal of Applied Physics, vol.
75, no. 10, pp. 4843-4850, May 1994.
[34] S. Dey and R. Mittra, "A conformal finite-difference time-domain technique for modeling cylindrical dielectric resonators," IEEE Trans. Microwave Theory Tech., vol. 47,
no. 9, pp. 1737-1739, 1999.
[35] C. J. Railton and J. B. Schneider, "An analytical and numerical analysis of several
locally conformal FDTD schemes," IEEE Trans. Microwave Theory Tech., vol. 47, no.
1, pp. 56-66, January 1999.
BIBLIOGRAPHY
[36] W. C. Chew and J. M. Jin,
133
"Perfectly matched layers in the discretized space: An
analysis and optimization," Electromagnetics, vol. 16, pp. 325-340, 1996.
[37] L. Tsang and J. A. Kong, "Scattering of electromagnetic waves from random media
with strong permittivity fluctuations," Radio Science, vol. 16, no. 3, pp. 303-320, 1981.
[38] A. K. Fung and F.T. Ulaby, "A scatter model for leafy vegetation,"
IEEE Trans.
Geosci. Elec., vol. 16, no. 4, pp. 281-286, Oct. 1978.
[39] F. T. Ulaby and R. P. Jedlicka, "Microwave dielectric properties of plant materials,"
IEEE Trans. Geosci. Remote Sensing, vol. 22, no. 4, pp. 407-415, July 1984.
[40] F. T. Ulaby, M. Razani, and M. C. Dobson, "Effects of vegetation cover on the microwave radiometric sensitivity to soil moisture," IEEE Trans. Geosci. Remote Sensing,
vol. 21, no. 1, pp. 51-61, Jan. 1983.
[41] L. A. Klein and C. T. Swift, "An improved model for the dielectric constant of sea
water at microwave frequencies," IEEE Trans. Antennas Propagat., vol. 25, pp. 104-
111, Jan. 1977.
[42] Y. Zhang, Forward and Inverse Problems in Microwave Remote Sensing of Objects in
a Complex Medium, Ph.D. thesis, Massachusetts Institute of Technology, 1999.
[43] A. K. Fung, M. R. Shah, and S. Tjuatja, "Numerical simulation of scattering from
three-dimensional randomly rough surfaces,"
IEEE Trans. Geosci. Remote Sensing,
vol. 32, no. 5, pp. 986-994, Sep. 1994.
[44] E. Suhir, Applied Probabilityfor Engineers and Scientists, McGraw-Hill, New York,
1997.
[45] P. Chaturvedi and R. G. Plumb,
"Electromagnetic imaging of underground targets
using constrained optimization," IEEE Trans. Geosci. Remote Sensing, vol. 33, no. 3,
pp. 551-561, May 1995.
134
BIBLIOGRAPHY
[46] C. Tai, Dyadic Green Functions in Electromagnetic Theory, IEEE Press, New York,
second edition, 1994.
[47] K. O'Neill,
"Exploration of innovative radar sensing schemes for subsurface object
detection," in 1997 InternationalGeoscience and Remote Sensing Symposium. Remote
Sensing - A Scientific Vision for Sustainable Development., 1997, vol. 3, pp. 1135-1137.
[48] G. Zhang, L. Tsang, and K. Pak, "Angular correlation function and scattering coefficient of electromagnetic waves scattered by a buried object under a two-dimensional
rough surface," Journal of the Optical Society of America A-Optics and Image Science,
vol. 15, no. 12, pp. 2995-3002, Dec 1998.