Optical Soliton Propagation and Control
by
Farzana Ibrahim Khatri
S.B., Massachusetts Institute of Technology, 1990
S.M., Massachusetts Institute of Technology, 1992
Submitted to the Department of Electrical Engineering and
Computer Science in partial fulfillment of the requirements
for the degree of
Doctor of Philosophy
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
May 1996
© Massachusetts Institute of Technology, 1996. All Rights Reserved.
Author ...................................
Department of Electrical Engineering and Computer Science
May 17, 1996
.................
Hermann A. Haus
Institute Professor
a' •S Supervisor
Certified by .........
.................
Accepted by ......
>rgenthaler
Chairman, Lpartment Pomumttee on iractuate Students
S
F T.AC
,cTHHINSLi",T
OF TEC:0HNOLOGY
JUL 16 1996
ULBRArIEs
Optical Soliton Propagation and Control
by
Farzana Ibrahim Khatri
Submitted to the Department of Electrical Engineering and
Computer Science on May 17, 1996, in partial fulfillment of
the requirements for the degree of
Doctor of Philosophy in Electrical Engineering
Abstract
Optical soliton pulses offer great promise as a means for transmitting high data rate information in optical fibers over trans-oceanic distances. This thesis addresses two aspects of
optical soliton communication. First, soliton propagation in the presence of a small-signal
background continuum is discussed. It is essential to examine soliton-continuum interaction as it may lead to timing jitter in the system, thus degrading transmission performance.
In this thesis, soliton interaction with a sinusoidal wave packet is examined both theoretically and numerically. Next, a method for supervisory control, or line-monitoring, for an
undersea soliton communication system is addressed. A line-monitoring system is a vital
component for any undersea transmission system as it provides information on system status and fault location while the system is in-service. In this thesis, such a system is proposed and numerically simulated.
Thesis Supervisor: Hermann A. Haus
Title: Institute Professor
Acknowledgments
There are many people who should be acknowledged for their role in my graduate
career at MIT. First and foremost, I wish to thank Institute Professor Hermann A. Haus,
my mentor since I was an undergraduate and thesis advisor for three theses! I am grateful
to him for his guidance, advice, and encouragement over the years and for providing me
with the opportunity to pursue a doctorate. Prof. Haus is an inspiration to us all.
I would also like to thank Professor Erich P. Ippen for all of his support and encouragement over the years. Prof. Ippen served on my thesis committee and provided helpful
suggestions.
Thanks to Dr. Franco Wong, the third member of my thesis committee, for his useful
suggestions and comments.
I would like to thank Cindy Kopf, probably the most efficient and competent secretary
I will encounter. She has been a joy to interact with over the years and has come to my rescue numerous times. She also throws the best parties at her cottage in New Hampshire.
Thanks also to Mary Aldridge and Donna Gale for their help over the years.
I would like to acknowledge the Research Laboratory of Electronics which provided
the facilities where much of this research was performed. In particular, thanks to Barbara
Passero, Mary Ziegler, and Dave Foss. Barbara and Mary made sure the RLE Document
Room was well-stocked with journals and books and always provided great dessert items
and conversation. Dave has given us much-needed computer support and Ethernet drops. I
would also like to acknowledge the San Diego Supercomputing Center which provides the
Optics Group with Cray time through a National Science Foundation grant. Also, portions
of this thesis research were supported by the U. S. Navy/Office of Naval Research under
contract N00014-92-J-1302, the Joint Services Electronics Program under contract
DAAH04-95-1-0038, and the U. S. Air Force Office of Scientific Research under contract
F49620-95-1-0021.
Thanks to my recent office-mates who are all dear friends: John Moores, Keren Bergman, Kohichi Tamura, Jerry Chen, Chris Doerr, Shu Namiki, and Pat Chou. John has been
a wonderful, supportive friend and colleague through the years. Thanks for many dinners
and conversations, not to mention answers to all my questions (both technical and nontechnical). I really enjoyed having Keren, now "Professor Bergman," as an office-mate.
Thanks for good advice and for making me smile. Kohichi has been a true friend who has
never failed to give me hope even when there seemed to be none. Thanks for looking after
me (even from Japan). Thanks go to Jerry, whose footsteps I plan to follow to New Jersey,
for being a kind and caring friend who has always been there to listen to my troubles.
Thanks to Shu for being a model office-mate; thanks for all your Macintosh help and for
many discussions on computers, careers, and life. Many thanks to Chris for his friendship,
support, and "Nick" cartoon. Finally, thanks to Pat for his advice and humor. It has been
great to have him back with us.
A special thanks goes to Jay Damask and to Lauren Doyle. Jay and I have gone
through the entire MIT graduate school experience together (starting when we got
accepted, back in Spring 1990). He has been a loyal friend since then. Our weekly lunches
this past year have definitely been enjoyable and inspiring. Thanks also go to Jay for introducing me to his fiancee, Lauren Doyle. Lauren has become a dear friend. I would also
like to thank my colleague and friend, William Wong. It was a lot of fun working with him
this past year. Thanks to Gadi Lenz for a fun and fruitful collaboration. Thanks to Lynn
Nelson for her understanding and friendship over the years. Thanks to Boris Golubovic for
his advice and friendship and for convincing me that Macintosh was the way to go. Thanks
also to my fellow Washingtonian, Dave Martin, for his friendship since 1986 (despite our
political differences).
I would like to thank other past and present students, postdocs, and affiliates of the
MIT Ultrafast Optics Group: Laura Adams, Sue Bach, Igor Bilinsky, Luc Boivin, Steve
Boppart, Brett Bouma, Jeff Bounds, Mark Brezinski, Stuart Brorson, Steve Cheng, Suky
Chou, Ali Darwish, Neriko Doerr, Dave Dougherty, Siegfried Fleischer, Melissa Frank,
Guiseppe Gabetta, Matthew Grein, Katie Hall, Janice Huxley-Jens, Joe Izatt, David &
Michelle Jones, Stephan Jiingling, Franz & Petra Klirtner, Jalal Khan, Jay Lai, Brent Little, Ling Yi & Leslie Liu, J. P. Mattia, Antonio Mecozzi, Satoko Namiki, Jerome Paye,
Mary Phillips, Malini Ramaswamy-Paye, Jeff Roth, Giinter Steinmeyer, Gary Tearney,
Erik Thoen, Costas Tziligakis, Nick Ulman, and Charles Yu. Thanks to all of you for interesting discussions. And, thanks to those persons I may have overlooked. Many thanks also
go to Mrs. Haus and Mrs. Ippen for great conversations and for hosting wonderful dinner
parties over the years.
Many thanks go to my colleagues at AT&T and Lucent Technologies. First, many
thanks go to Steve Evangelides. Not only is he a great colleague, but he is a loyal and close
friend. Thanks go to Bruce Nyman (now with JDS Fitel, Eatontown, NJ), a collaborator on
the soliton LM project who has become a good friend. Bruce was an invaluable job-hunting resource. Thanks to Neal Bergano for all his advice and thoughts on soliton LM (but
not for recommending Dumb and Dumber). Thanks also go to George Harvey for interesting lunch discussions and for his wine recommendations. And, many thanks to the Lucent
"extended" soliton group: Linn Mollenauer; Mike, Melanie, Max, Gabrielle, Ethan, and
Heidi Neubelt; and Pavel Mamyshev. It was a pleasure working closely with Linn, Mike,
and Pasha. Thanks also to the Neubelt clan, my family away from home, for their support
and friendship. A special thanks goes to Leda Lunardi for her friendship and support.
Thanks also to Stuart Mayer for his ideas on how to clear up my explanations. Finally,
thanks to Peter Runge and Frank Kerfoot who made it possible for me spend my summer
at AT&T.
Finally, a million thanks go to my parents, Mariam and Ibrahim Khatri, without whom
all of this would not have been possible. Thanks for everything. This thesis is dedicated to
you both.
Contents
Chapter 1 Introduction ................................................................................
14
1.1
Scope of this thesis ........................................................
..........
........... 17
1.2
Simulation code and laboratory facilities ......................................
..... 18
Chapter 2 Background ................................................................................
2.1
Optical fibers: basic properties [7] .........................................
2.2
Undersea systems ........................................................
2.2.1
2.2.2
2.3
2.4
2.5
Transmission schemes ................................................. 22
Undersea fibers around the world ......................................
.... 24
..................... 27
The nonlinear Schr6dinger equation ........................................ 28
........................32
M aster equation .....................................
...... 34
Path-averaged solitons [59] .......................................
Soliton perturbation theory [107] [108] .............................................. 35
Inverse scattering theory [105] [106] .....................................
... 37
Soliton wavelength-division multiplexing [36]-[49] ....................... 38
Limits on soliton transmission ...........................................
2.4.1
2.4.2
2.4.3
2.4.4
2.4.5
2.4.6
2.4.7
2.4.8
2.4.9
....... 20
...................... 21
Optical solitons .......................................................................
2.3.1
2.3.2
2.3.3
2.3.4
2.3.5
2.3.6
19
.......
The Gordon-Haus effect [51] .......................................
......
Self-Raman effect [50] [65] .......................................
......
Third-order dispersion [65] ........................................
......
Soliton-soliton interaction [53] ........................................
Polarization mode dispersion [55] [74] ...............................................
Piezo-electric effect [57] ..................................................................
.......
Four-wave mixing [84] ..........................................
Periodic perturbations [54] [109] ......................................
....
Soliton-continuum interaction [113] -[116] ....................................
Soliton control ....................................................................
2.5.1
2.5.2
2.5.3
2.5.4
2.5.5
41
41
43
43
43
45
45
45
46
47
47
Filters [61] - [62], [64] ..................................... ............
47
Amplitude modulation [62] [63] ......................................
..... 49
Sliding frequency-guiding filters [66] ......................................
49
....... 53
Dispersion tailoring [84] .........................................
Alternative methods ...........................................
........ 53
Chapter 3 Soliton-continuum interaction ......................................
3.1
3.2
The two-soliton solution ................................................
Expansion in terms of perturbing soliton ......................................
The physical meaning of the perturbation .....................................
Collision with a general wave packet ........................................
66
69
71
74
................... 75
.......
75
79
Continuum in WDM systems ...................................................
79
3.4.1
3.4.2
3.5
.................................................. 66
Computer simulations .....................................................
3.3.1
3.3.2
3.4
.......... ........... 56
An exam ple ......................................................
Gordon's formalism [110] ............................................................... 63
Theory .......................................................
3.2.1
3.2.2
3.2.3
3.2.4
3.3
....................... 56
B ackground ..........................................................................
3.1.1
3.1.2
..........55
.............
Two-pulse collisions .....................................
....
Three-pulse Collisions .....................................
... 80
WDM soliton-continuum interaction .....................................
The effect of filter shape on timing jitter ...................................... 83
Sum m ary ............................................................................
......................... 86
Chapter 4 Soliton line-monitoring .......................................
.......................
88
4.1
Line-monitoring for NRZ systems ............................................... 89
4.2
Soliton LM issues ............................................................. 90
4.2.1
4.2.2
4.2.3
4.2.4
4.2.5
4 .2.6
....... 92
LM channel specifications .......................................
Loop-back compatibility with sliding filters .................................... 93
Maintaining solitons after the loop-back ..................................... 94
Gain saturation and crosstalk ............................................ 95
Compatibility with AT&T's continuous loop-back protocol .............. 95
C ost .............................. ...........
............................................. 95
............
4.3
Soliton LM scheme [99]-[101] .....................................
4.4
Computer simulations ...........................................................
4.4.1
4.5
Faulty pump module .....................................
D iscussion ..........................................................................
4.5.1
4.5.2
....
95
100
........
100
....................... 106
...... 106
Gain-shaping filter design ........................................
Bidirectional LM .................................................... 107
4.6
Another possible LM scheme ..................................................
4.7
Sum m ary ...........................................................................
107
........................ 110
Chapter 5 Summary and future work .....................................
5.1
On soliton propagation with continuum ...................................................
5.2
On soliton supervisory control systems ..........................................................
111
111
13
Normalizing the evolution equation ..................................
114
Appendix B Numerical simulation of the NSE .....................................
118
Appendix A
5.3
The split-step Fourier method ..................................................
118
5.4
Optimizing Cray code .......................................................
120
References ........................................
R. 1
R.2
R.3
R.4
R.5
122
Background & submarine systems .......................................
....... 122
Transmission using solitons (historical/general) ............................................. 122
Alternatives to on-off keying for soliton communications ........................... 123
Transmission using the non-return to zero scheme ..................................... 123
Long-distance soliton experiments .......................................
....... 123
R.6 Wavelength-division multiplexing .......................................
....... 124
R.7 Soliton transmission control and limitations ......................................... 125
R.8 Line monitoring .............................................................. 127
R.9 Classical theoretical treatments ..........................................
....... 129
R. 10 Solitons and continuum .....................................
................
129
R. 11 Theses and reports ............................................................ 129
List of Figures
1.1
Recent soliton transmission results. From Ref. [20]. Note: results only go through
F all 1995. ........................................................ .................................................. 15
1.2
Time-line of highlights of the history of soliton communication. Note that Ref. [20]
was very helpful in providing the facts for this figure ........................................... 16
2.1
Schematic of step-index optical fiber. From Ref. [7]. ...................................... 20
2.2
"Repeatered" all-optical transmission line. The "repeaters" are Erbium-doped fiber
amplifiers (EDFA's) which are pumped by diodes which provide cw light at 1480
n m . .....................................................................................
............................... 2 1
2.3
NRZ, RZ, and soliton format for bit pattern 10110. Note: the vertical scale is in arbitrary units. ...................................................... ................................................ 23
2.4
Achieved error-free distances in a single channel using solitons with sliding-frequency guiding filters (seeSec. 2.5.3) vs. NRZ. Taken by permission from [71]. 24
2.5
International undersea fiber network. From Ref. [10]. ..................................... 25
2.6
Cost per circuit of trans-Atlantic cable. From Ref. [10] .....................................
2.7
Scope of FLAG project. Taken from [14]. ......................................
2.8
Africa-ONE project. From Ref. [11]......................................
2.9
Schematic of soliton propagating through a lossless fiber. The pulse shape is maintained ! .......................................................... .................................................... 2 8
2.10
Soliton WDM collision in a lossless fiber. The solitons emerge unchanged! (a)
shows contour plot; (b) shows 3-D plot .............................................. 29
2.11
Fundamental soliton. Top trace shows the soliton intensity and phase vs. time. The
lower trace shows the soliton phase as a function of distance ............................ 31
2.12
Soliton period and peak power vs. FWHM for various values of fiber dispersion................................................32
2.13
Dispersion profiles for standard, dispersion-shifted, and dispersion-flattened fibers.
D > 0 is anomalous. From Ref [7]. ................................................ 33
2.14
Path-averaged soliton. (a) shows the pulse power; (b) shows the pulse width, both
as functions of distance .......................................................... 34
2.15
Expansion functions for soliton perturbation theory. .....................................
2.16
WDM collision in a fiber with Raman effect. Notice that the collision now becomes
25
..... 26
........
27
37
asymmetric. (a) shows contour plot; (b) shows 3-D plot. Compare to Fig. 2.10...40
2.17
BER vs. c. A plot of Eq. (2.40). ...................................................
2.18
The effect of third-order dispersion on a soliton. The simulation was run for 3 soliton periods........................................................ ................................................ 44
2.19
Contour plots of soliton-soliton interaction in normalized units. On the LHS, the
initial condition consists of two same-phase soliton pulses. These solitons attract.
On the RHS, the initial condition consists of two opposite-phase solitons. These
solitons repel. ..................................................... ............................................... 44
2.20
Simulation of resonant sidebands due to periodic gain. Shown are spectral (upper)
and temporal (lower) intensities, both on log scales ....................................... 47
2.21
Schematic of soliton control by filtering. (Note: this figure is from Prof. Haus' arch ives.) ...................................................................................................................
48
2.22
Soliton transmission system with filtering .......................................
2.23
Sliding-frequency guiding filter principle. The soliton is nonlinear and can generated the new frequencies needed to follow the filter. Noise is linear and dies out because it cannot follow the filter ......................................
.....
............... 50
2.24
Schematic of sliding filter action. Soliton pulses of random heights are input and
they are standardized at the output...............................
..............
51
2.25
Typical in-line filter profile for sliding-filter case with sample soliton pulse. Sliding
filters may have a smaller FSR. The filter shown has an FSR of 100 GHz. The pulse
spectral FWHM is 15.7 GHz (a 20 ps pulse) ......................................
.... 52
2.26
Up-sliding vs. down-sliding. Top trace shows the pulse energy as a function of distance. The lower trace shows the timing jitter as a function of distance. .......... 54
3.1
Schematic for periodic perturbation simulation .........................................
3.2
Evolution of continuum. Shown are log plots of bit-pattern vs. time for various distances as marked. .................................................. ............................................ 58
3.3
Part II of Fig. 3.2 ..................................................
3.4
Solitons interacting through continuum generated by neighboring soliton. Shown is
the initial condition and the pulse timing deviation as a function of distance for each
pulse. ...................................................................................
.............................. 60
3.5
Input and output pulses for case with parameters given in Table 3.1................61
3.6
This case is to be compared with that in Fig. 3.4. The parameters used are the same
as given in Table 3.1, but the fiber is lossless; hence, there are no periodic perturbations. (a) shows initial (dashed) and final pulses. (b) shows the pulse timing as a
function of distance for each of the pulses.................................
....... 63
42
...... 49
57
............................................ 59
3.7
Plot of frequency detuning vs. time shift for WDM collision of two N=1 solitons.
The exact expression is given by Eq. (3.28). Approx. 2 is given by the second part
of Eq. (3.27). Approx. 1 is the common approximation given by Eq. (3.29).......70
3.8
Simulation setup to observe timing-shifts due to soliton interaction with a sinusoidal w ave packet ................................................... ............................................. 75
3.9
The timing shift vs. amplitude of perturbation due to collision with a soliton (shown
by X's) and Gaussian (shown by O's) wave packet of the same net energy. Theo.... 76
retical calculations are shown by the solid line. .....................................
3.10
The timing shift vs. amplitude of perturbation due to a collision with a pulse with
energy much less than a fundamental soliton. In all cases, the normalized pulse
width is 20 (the pulse width of the perturbation relative to the main soliton). The
X's represent simulation data and the solid line shows theory ........................... 77
3.11
The timing shift as a function of distance due to an asymmetric Hermite Gaussian
wave packet theory (solid) and simulation (dashed). Inset shows the initial pertur78
bation as a function of time ...................................... .................
3.12
Collision of soliton with two low intensity wave packets. Shown is a plot the timing
shift as a function of frequency detuning between the two wave packets. The X's
and O's represent a soliton collision with two low intensity soliton and Gaussian
pulses, respectively. ............................................... ........................................... 80
3.13
Simulation scenario: two WDM soliton pulses are input into a lossy fiber with periodic amplifiers. Continuum shed by one soliton affects the timing of the other soli............................... 8 1
ton . .....................................................................................
3.14
Results from simulation using parameters given in Table 3.3. Shown is the pulse
82
timing of soliton #2 caused by the continuum of soliton #1............................
3.15
Input and output pulses for various amplifier spacings for the scenario shown in
Fig. 3.13. In all cases, the dashed line is the initial condition. The intensity of the
continuum increases as the amplifier spacing increases ..................................... 84
3.16
Timing jitter as a function of distance for two filter shapes. ..............................
3.17
Normalized power spectra for simulation for parameters given in Table 3.3 for the
case with Fabry-Perot filters. Upper trace is before the output filter, lower trace is
after the output filter. The input spectrum is shown by the dashed line. ............ 86
4.1
Line-Monitoring set-up for undersea NRZ systems. Based upon a figure in Ref.
.............................. 89
[104 ]...................................................................................
4.2
Amplifier pair architecture..............................................
4.3
Coupler configuration to monitor both loop-back and reflection paths. Coupler C is
....... 92
set so that the reflection path has lower loss.................................
...........
85
............ 91
4.4
Soliton carrier frequency as a function of distance (eastbound and westbound) for
(a) up-sliding filters for both eastbound and westbound transmission; (b) up-sliding
for eastbound and down-sliding for westbound transmission; (c) "wiggling" filters .................................................................................................................... .. 94
4.5
Our soliton LM scheme. The LM channel is a separate WDM channel which propagates east on a fiber with dispersion DE, is looped back onto the opposite-going
fiber via fiber couplers, and returns westbound on a fiber with DW..................96
4.6
Soliton LM system: schematic plot of wavelength vs. distance. East and west filters
slide in opposite directions. The LM channel is placed in the center; eastbound and
westbound data channels are spectrally separated ......................................... 97
4.7
Relation between dispersion and the data and LM channels. ............................. 98
4.8
Effective gain for the LM channel as a function of distance. Solid line corresponds
to up-sliding east / down-sliding west filters. Dashed line corresponds to down-sliding east / up-sliding west filters. In both cases, the LM channel propagates eastbound and loops back westbound. ................................................. 99
4.9
Plot of wavelength vs. distance which shows the relative positioning of the data and
L M channels..................................................... .............................................. 10 1
4.10
Schematic for simulation of 285th pump module malfunction (loss of 4dB)......101
4.11
(a) and (b) show simulation results for loop-back "1" and "2." Shown in (a) is the
degraded signal returning from loop-back "1." The pattern has disappeared. Shown
in (b) are the input (dashed) and output (solid) pulse power vs. time. ................ 102
4.12
A schematic of the signal which is received when the 286th pump module is
dow n..........................................................................................................
103
4.13
(a)-(c) show pulse frequency shift, peak power, pulse width all vs. distance for loopback "2." .................................................................
............... ............... 104
4.14
Simple gain-shaping filters which can be used to eliminate gain saturation problems
106
on the returning fiber . .......................................................................................
4.15
Placement of gain shaping filters in soliton LM system ...................................
4.16
Bi-directional soliton LM scheme which employs CDF's ................................ 109
5.1
Further applications for the study of soliton-continuum interaction. Shown above is
a very simple schematic for a fiber loop memory or a mode-locked fiber soliton laser. Below are typical pulse patterns for both cases. ..................................... 112
B.1
Split-step Fourier method schematic (similar to that found in Ref. [7])..........119
108
List of Tables
2.1 Summary of typical numbers for long distance soliton transmission .......................
22
2.2 Summary of symbols in the Master Equation, Eq. (2.12)............................................33
2.3 Simulation parameters for Fig. 2.26. ...................................................
52
....... 54
2.4 Alternative methods of soliton control. .........................................
3.1 Simulation parameters for figures Fig. 3.2 - Fig. 3.6..................................
... 61
3.2 Simulation parameters for scenario shown in Fig. 3.13 and results shown in Fig. 3.14
and Fig. 3.15. .............................................................................................................. 82
3.3 Simulation parameters for simulations in Sec. 3.4.2. ................................................ 83
4.1 Summary of simulation parameters for simulations in Sec. 4.4. ............................ 105
4.2 Eastbound channel data...............................................
......................................... 105
3.4 Note wavelength is in nm and D is in ps/nm/km ......................................
4.3 Westbound channel data. ....................................................................
A. 1 Soliton normalizations ................................................
105
.................. 106
116
B. 1 Typical parameters used for simulation of an NSE soliton .................................... 119
List of Acronyms
ASE
AU
BER
BTL
CDF
CLEO
CNSE
cw
EDF
EDFA
4WM
FLAG
FSR
FT
FWHM
Gbps
GVD
IST
LHS
LM
NRZ
NSE
OFC
OOK
OTDR
PMD
PNSE
ps/nm/km
RHS
RSFS
RZ
SDSC
SPM
SRS
TAT
TOD
TPC
TDM
XPM
WDM
Amplified Spontaneous Emission (noise)
Arbitrary Units
Bit Error Rate
British Telephone Laboratories
Channel Dropping Filter
Conference on Lasers and Electro-Optics
Coupled Nonlinear Schr6dinger Equation
continuous wave (radiation)
Erbium Doped Fiber
Erbium Doped Fiber Amplifier
Four-Wave Mixing
Fiber-optic Loop Around the Globe
Free Spectral Range
Fourier Transform
Full-Width at Half-Maximum
Gigabits per second
Group Velocity Dispersion
Inverse Scattering Theory
Left Hand Side
Line-Monitoring
Non-Return to Zero
Nonlinear SchriSdinger Equation
Optical Fiber Communications (Conference)
On-Off Keying
Optical Time-Domain Reflectometry
Polarization Mode Dispersion
Perturbed Nonlinear Schr6dinger Equation
picoseconds per nanometer per kilometer (units
for GVD)
Right Hand Side
Raman Self-Frequency Shift
Return to Zero
San Diego Supercomputing Center
Self-Phase Modulation
Self-Raman Scattering
Trans-ATlantic (fiber cable)
Third-Order Dispersion
Trans-PaCific (fiber cable)
Time-Division Multiplex
Cross-Phase Modulation
Wavelength-Division Multiplex
Chapter 1
Introduction
With the advent of the "information superhighway" and the explosive growth of the graphics-driven World Wide Web, the demand for high bit-rate communications systems has
been rising exponentially. For example, in September 1995, there were 24+ million Web
users and this number was expected to double in just 6 months [1]! This insatiable desire
to access the information superhighway has refueled extensive research efforts worldwide
to develop new and improved all-optical, fiber-based transmission systems. One such
effort has involved optical soliton pulses, the subject of this thesis.
Optical solitons are pulses of light which are considered the "natural mode" of an optical fiber: solitons are able to propagate for long distances in optical fibers while maintaining their shape. Soliton propagation in an optical fiber was first demonstrated at Bell
Laboratories by L. F. Mollenauer, R. S. Stolen, and J. P. Gordon in 1980. The idea of using
solitons for trans-oceanic communications was first proposed by A. Hasegawa at AT&T
Bell Laboratories in 1984. Since then, researchers worldwide have been engaged in a race
to transmit the highest bit-rates over the longest distances. A plot of the progress of soliton
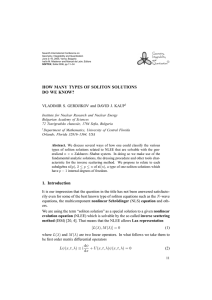
distance-bit-rate product over time taken from Ref. [20] is shown in Fig. 1.1. A time-line
of the highlights of the history of soliton communication is given in Fig. 1.2.
10000
E
o
o
1000
A A
i
0
o
100
0000
0
v
C10
0
CO
0
0
o
oo o0
0
oo 0000
0
o0
0o 0
0
CO
0
I
I
1988 1989
I
I
I
I
I
I
1990
1991
1992
1993
1994
1995
1996
Year
*
*
A
O
*
A
metropolitan network
signal frequency sliding
sliding guiding filters
distributed EDFAs
unequal amplitude solitons
Raman gain
O
others
Figure 1.1: Recent soliton transmission results. From Ref. [20]. Note:
results only go through Fall 1995.
j E
c,
=70-
0,
W
LC
0
a
C.-
0OC
EE
Z W
0)
dt
0
EE
N E
o
o ue -
E
ZZ ,-,,, E w°z
u oo
Cu4
**
o
0
.,
Ec
00
ciso
0)
aE
o
a-
15 o~
C:c )
o oc4-o
oa
0 o
E a-
(o1
o
rO
CO'E
Z7
(0
4.cnzcEwC•3 ,_
(M:
U)
-
c
E
0 .
U)
DC
cz
Ca0
O
T-
0
4a
ru)
cz
o
.-- a)
cn= 1)O
©
oIts
,=Z
c-z
o
0)
CW
0
cl)a)0 (D
,C_.
"6
C)
Ný-
_.- 0
C
co
-•
The most recent experimental results of soliton transmission indicate which research
institutions are involved in the field. Mollenauer's group at the newly formed Lucent Technologies, Bell Labs Innovations (formerly AT&T Bell Labs) has continued its work and
most recently transmitted 8 Wavelength-Division Multiplexed (WDM) channels at 10
Gigabits per second (Gbps) each over trans-oceanic distances (not shown in Fig. 1.1) [34]
[35]. A group at BNR Europe Ltd. has transmitted solitons at 20 Gbps over 12.5 Mm [32].
M. Nakazawa at NTT successfully transmitted 10 Gbps over 1 million kilometers [28],
and more recently performed a field test in Tokyo with solitons at 10 Gbps [30]. France
Telecom is also working on soliton systems and recently transmitted 20 Gbps over transoceanic distances with relatively long (105 km) amplifier spacings [33] as well as with
sliding-frequency guiding filters (to be discussed in the next chapter) [31]. KDD has transmitted 20 Gbps using long amplifier spacing (100 km) over 1 Mm [29]. Note all of these
experiments use some form of soliton "control," (see Chapter 2) allowing for higher bit
rates over longer propagation distances.
Recent review papers written by Nakazawa [19] and H. A. Haus [17] [20] provide the
reader with a flavor of the field. Another article by Haus provides a good overview [18].
There are also several books on the topic, including Refs. [15] and [16].
1.1 Scope of this thesis
This thesis will address issues in soliton propagation and control. Chapter 2 provides the
necessary background information to understand solitons and the various fundamental
concepts important to the study of solitons for undersea transmission. Chapter 3 contains
theoretical and numerical results on soliton-continuum interaction, possibly a detrimental
effect in soliton communications systems. In Chapter 4, a line-monitoring system for
supervisory control of an undersea soliton transmission system is proposed and numerically demonstrated. Line-monitoring is a technique for locating faults in an installed
undersea transmission line while the line is in-service. A line-monitoring system must
exist before solitons are ever considered for use in an undersea cable. Chapter 5 contains
conclusions and future work. Normalization of the Nonlinear Schr6dinger Equation
(NSE), the equation of motion for a soliton pulse in an optical fiber, is reviewed in Appendix A and a review of a method to numerically simulate the NSE is in Appendix B.
1.2 Simulation code and laboratory facilities
The simulation code used for the numerical studies is written in
FORTRAN.
The code was
initially developed by S. Kaushik (now at Sandia Labs) and then augmented by J. D.
Moores, (now at MIT Lincoln Lab), and other current and former graduate students
(including myself). We have developed a very comprehensive, powerful program which
can simulate just about all the relevant effects. For my thesis work, I have written my own
code, based upon the aforementioned code, which contains only the effects relevant to my
research. The code is generally run on the Cray at the San Diego Supercomputing Center
(SDSC) which I access via telnet from the MIT Athena Computing Environment or from
my personal Power Macintosh 7100/66 (see Appendix B for details on the Cray). The
exception is the work reported in Chapter 4 on soliton line-monitoring. This work was
done primarily using the resources at AT&T Bell Laboratories in Holmdel, NJ.
Chapter 2
Background
This chapter provides background information on optical solitons with an emphasis on
long-distance communications. Basic properties of optical fibers are described in Sec. 2.1.
Undersea systems are described in Sec. 2.2. Sec. 2.3 introduces the nonlinear Schr6dinger
equation, the equation of motion of light in an optical fiber. Properties of solitons and
path-averaged solitons are discussed. Soliton perturbation theory, which is useful to analyze deleterious effects in long-distance fiber propagation, is reviewed. The basics of
inverse scattering theory for solving soliton problems (which becomes relevant in Chapter
3) is reviewed. Finally, Wavelength-Division Multiplexing (WDM) is touched upon.
Sec. 2.4 describes the various deleterious effects which impose limits on the bit-rate or the
distance over which one can communicate with optical solitons. Effects such as amplifier
noise, soliton-soliton interaction, third-order dispersion, polarization mode dispersion, and
the piezo-electric effect are treated. Sec. 2.5 discusses "soliton control," or ways to combat
these deleterious effects. These methods include amplitude modulation as well as filtering
using stationary or sliding filters. Details are given on the topics which are most relevant to
this thesis.
2.1 Optical fibers: basic properties [7]
Transmission of data has been revolutionized by the use of the optical fiber. Optical fibers
provide low loss (-0.25 dB/km at a wavelength of 1550 nm) and a wide bandwidth and
thus are an ideal medium for transmitting large amounts of data over long distances. An
optical fiber consists of a high refractive index core surrounded by a layer of lower index
cladding, as shown in Fig. 2.1. In the figure, n1 is the refractive index of the core, n2 is the
refractive index of the cladding, and n o is the refractive index of air. The core and cladding
diameters are given by a and b, respectively. For a single mode fiber, a is in the range of 24 gim. Typical values for b are 50-60 gim.
jacket
cladding
core
nl
n
! 'L2
-0>
C radial distance
radial distance
Figure 2.1:
Schematic of step-index optical fiber. From Ref. [7].
Two important effects for pulses propagating in optical fibers are chromatic dispersion
and nonlinearity. Dispersion is the frequency dependence of the index of refraction. The
mode propagation constant is given by:
12
(
k(to) = -n(o) = k2+ kl(o-o°)+2 k2(
C
2
0
2+
(2.1)
where o is frequency, oo is the carrier frequency of the pulse of interest, c is the speed of
light, n(co) is the frequency-dependent index of refraction, and
km =
for (m = 0, 1, 2,...).
_
(2.2)
-om
The group velocity of the pulse traveling in the fiber is given by v, = 1/k 1 and the chromatic dispersion is given by k 2 . To obtain a value for the Group Velocity Dispersion
(GVD), the waveguide dispersion must also be included. Note that ki and k 2 will hereafter be referred to as k' and k" (with the exception of Appendix A).
Fiber nonlinearity, or the Kerr effect, is the other important effect for pulses propagating in optical fibers. In this effect, the refractive index is intensity-dependent and given by:
n(I) = n,
+
n 21
(2.3)
where n2 is the nonlinear index and I is the pulse intensity.
2.2 Undersea systems
Optical fibers have been used for undersea point-to-point transmission systems since
1986. Early systems employed electro-optic regenerators. These are large devices placed
every -100 km that convert the degraded optical data into an electrical signal which is
used to remodulate a laser and then reinjected into the fiber. Regenerators are cumbersome
and expensive devices.
pump
optical fiber
Figure 2.2:
"Repeatered" all-optical transmission line. The "repeaters" are
Erbium-doped fiber amplifiers (EDFA's) which are pumped by diodes which provide cw light at 1480 nm.
In the 1980's an enabling technology came to fruition which revolutionized undersea
transmission: the Erbium-Doped Fiber Amplifier (EDFA) [3][4][5]'. With EDFA's, transoceanic all-optical2 transmission became possible without the use of bulky electronic
1. See also E. Desurvire, Erbium-doped FiberAmplifiers, Wiley & Sons, 1994.
regenerators. EDFA "repeaters" consist of approximately 10 m of Erbium-doped fiber and
are spliced directly into the transmission fiber providing gains up to 30 dB. The EDFA's
are pumped using a continuous wave (cw) optical pump module at either 1480 or 980 nm.
A sample optical transmission line is shown in Fig. 2.2. The transmission line consists of
an optical fiber with periodic amplification stages. Typical numbers for such systems are
summarized in Table 2.1.
Parameter
Typical value
transmission distance
10,000 km = 10 Mma
amplifier spacing
20 - 50 km
transmission wavelength
1550 nm
fiber loss
0.25 dB/km
amplifier gain
30 dB
amplifier length
10 m
pump wavelength
1480 nm
pump power
20 mW
Table 2.1: Summary of typical numbers for long distance soliton transmission.
a. This is approximately the trans-Pacific distance.
2.2.1 Transmission schemes
Solitons are one way to transmit information over long distances. Two other schemes are
Non-Return to Zero (NRZ) and Return to Zero (RZ). All three schemes employ On-Off
Keying (OOK). In the OOK scheme, a ONE bit is represented by the presence of a pulse
inside the bit slot and a ZERO bit is represented by an empty slot.
A transmission scheme which is currently popular is a "linear" transmission scheme
called Non-Return to Zero (NRZ) [23] [24]. Fig. 2.3 shows a comparison of NRZ with RZ
(Return to Zero), where T is the bit interval. In the NRZ scheme, the bit fills the entire bit
interval. That is, the pulse "width" is equal to the bit interval, T. Thus when there are two
ONE's in a row, the transmitted signal is one long pulse spanning time 2T. The NRZ format
2. By "all-optical," I mean a system in which there is no opto-electronic conversion of the data during transmission.
1
I
0
I
1
I
1
I
0
I
I
I
I
NRZ
RZ
T
I
T
soliton
Figure 2.3:
NRZ, RZ, and soliton format for bit pattern 10110. Note:
the vertical scale is in arbitrary units.
of transmitting data uses "pulses" of light which propagate with a power low enough so as
to avoid fiber nonlinearity. Furthermore, the fiber GVD must be tailored to average to zero
over the transmission distance in order to suppress dispersive broadening.
In the RZ format, the bit does not fill the entire bit slot, but only a fraction of it. This
method of transmission was recently demonstrated by N. S. Bergano and coworkers [25].
The third transmission method uses soliton pulses, the main concern of this thesis.
Soliton pulses are inherently RZ, as shown in Fig. 2.3. A soliton is a unique pulse of light
which balances fiber nonlinearity and dispersion. I will further describe solitons in the following sections. Although soliton communication generally employs OOK coding, alternate coding schemes have been proposed (such as Hasegawa's eigenvalue communication
[21] and N. Akhmediev's three-soliton packets [22]).
Fig. 2.4 shows a qualitative picture of how solitons with sliding-frequency guiding filters (see Sec. 2.5.3) compare against "linear" NRZ transmission in terms of error-free
propagation at various bit rates. Note that only a single channel is considered. From this
picture, it is evident that solitons may have a great future in telecommunications. Further-
0
5
I
10
I
15
I
25
I
30
I
35
I
45
40
I
I
SOLITONS
(NO NRZ!)
20 Gbit/s
20
I
SOLITONS
10 Gbit/s
NRZ
I
SOLITONS
5 Gbit/s
TO 70?
NRZ
0
•
I
I
I
5
10
I
15
l
l
20
25
Distance (Mm)
l
30
l
35
l
40
|
45
Achieved error-free distances in a single channel using soliFigure 2.4:
tons with sliding-frequency guiding filters (seeSec. 2.5.3) vs. NRZ. Taken by
permission from [71].
more, the achieved bit-rate distance product of transmission using soliton pulses has been
increasing as a function of time, as shown in Fig. 1.1. Note that Fig. 1.1 does not contain
the latest result by Mollenauer et al. of 8 WDM channels at 10 Gbps over a trans-oceanic
distance of 9.6 Mm which was presented at the 1996 Optical Fiber Communications
(OFC) Conference [34]. This gives a bit rate distance product of 800 Tb/s km.
2.2.2 Undersea fibers around the world3
On October 16, 1995, AT&T's 6,500 Km (6.5 Mm) newest trans-Atlantic fiber (TAT-12)
began transmitting [8]. TAT-12/13 are two fiber pairs of total length 13 Mm which run at 5
Gbps allowing for more than 300,000 simultaneous two-way voice, video, or data transmissions (compared to 80,000 for the previous cable) [9] [12]. Fig. 2.5 shows a chart of the
undersea fiber systems projected for 1997. This diagram gives the reader a notion of the
scope of undersea fibers around the world. Fig. 2.6 shows the cost per circuit of the transAtlantic cable as a function of time, which is clearly decreasing.
3. The interested reader is referred to the Jan/Feb 1995 issue of the AT&T Technical Journalwhich
details undersea communications technology. It is currently available on-line at: http://
www.att.com/att-tj/v74n 1/. Also, Ref. [13] provides a good overview.
International Undersea Fiber Systems - 1997
Figure 2.5:
International undersea fiber network. From Ref. [10J.
Cost Per Circuit Per Year
Of Trans-Atlantic Systems
$100,000 TAT-1
$10,000
TAT-2
TAT-3 TAT4
TAT5
TAT-6
$1,000
TAT-7
TAT-7
AT
TATII8!
TAT-9
TAT-12
$100
10
1956
1963
1970
1983
1989
Year
Figure 2.6:
Cost per circuit of trans-Atlantic cable. From Ref. [10].
TAT-12/13 represents only one of many high-speed fiber links. Another link similar to
TAT-12/13 is TPC-5 which spans the Pacific; this cable is currently undergoing testing.
Project FLAG (Fiber-optic Link Around the Globe), shown in Fig. 2.7, will consist of a
27.3 Mm (mainly undersea) optical fiber which begins at Great Britain and winds its way
through the Atlantic, the Mediterranean, the Indian Ocean, and the Pacific eventually terminating in Japan. The fibers will run at 5-10 Gbps. This project, which will be completed
in 1997, is funded by a consortium of six companies around the world. AT&T Submarine
Systems, Inc. and KDD Submarine Cable Systems will build the cable. Another proposed
project is Africa ONE, a 35 Mm undersea fiber which circles Africa, shown in Fig. 2.8 [6].
This project is unique in that it will use eight Wavelength-Division Multiplexed (WDM)
channels to preserve national sovereignty.
':""~I
iiiiti'::-:':
6~i~l:
:::-i-:
i:i:::~
I::·:-:
~j-:::::-:
::
!:::::i:--~ii-ii-i
i-·1
:';:
I::
:::::::
ii-~
:; :-::il_-~_::::ii:
Figure 2.7:
Scope of FLAG project. Taken from [14].
One should note, however, that these projects will all use the NRZ transmission
scheme. There is currently no soliton system in use or planned in the near future.
COLUMBUS II
VE2
a,
;a.
and
re
Figure 2.8:
Africa-ONE project. From Ref. [ll].
2.3 Optical solitons
The basic building block of this thesis is the optical soliton which propagates in a nonlinear, dispersive optical fiber [15] - [20]. A soliton is a specific type of solitary wave, or a
pulse whose amplitude and derivatives with respect to the propagation axis vanish at +oo
[117]. In a lossless, perfect optical fiber, the nonlinearity and dispersion balance so the
pulse can propagate indefinitely, maintaining its shape, as shown schematically in Fig. 2.9.
Since the loss in a typical communications-grade optical fiber is on-average -0.221 dB/km
[26], the soliton may propagate quite a distance without losing a significant amount of
energy.
Another property of soliton pulses is that they are able to "collide" with one another
and emerge unchanged (in a lossless fiber). For example, Fig. 2.10 shows a contour plot
and a three-dimensional plot of a WDM soliton collision. In this case, the initial condition
consists of two solitons, initially separated in time. Soliton #1 is positioned at the origin
and soliton #2, which has a different carrier frequency (normalized detuning = -4) than
soliton #1, is positioned to "collide" with soliton #1. The coordinate system propagates at
peak power I, pulse width t
t
lossless optical fiber
()
,
)
z
Schematic of soliton propagating through a lossless fiber. The
Figure 2.9:
pulse shape is maintained!
the group velocity of soliton #1. As can be seen from the figure, the solitons pass through
each other and emerge unchanged.
The remaining portion of this section reviews optical soliton basics with a slant toward
long-distance transmission. Topics discussed are the nonlinear Schr6dinger equation,
path-averaged solitons, soliton perturbation theory, inverse scattering theory, and wavelength-division multiplexing.
2.3.1 The nonlinear Schr6dinger equation
The motion of a pulse of light in a lossless fiber with only dispersion and nonlinearity may
be described by the Nonlinear Schr6dinger Equation (NSE):
2
.au Ik"Tah + KIU12
az
(2.4)
2 at2
where u = u(t, z) is the slowly-varying pulse envelope; z is the propagation distance in
meters; t is the temporal distance along the pulse in seconds; k" is the GVD of the fiber in
s2 /m, the second derivative with respect to frequency of the propagation constant k(o);
and Kis the Kerr coefficient in m-2W
-1. The
Kerr or Self-Phase Modulation (SPM) coeffi-
cient in rad/W/m is defined as
K=
2ntn 2
/A eff
(2.5)
2
C,
-O
&1.5
(a)
0
CO
o(-,
0.5
n
-10
-8
-6
-4
0
2
-2
Time (normalized)
4
6
8
10
-I
0.8
(D
N
E 0.6
0
O
S0.4
r
-
0.2
0
2.5
20
Figure 2.10: Soliton WDM collision in a lossless fiber. The solitons
emerge unchanged! (a) shows contour plot; (b) shows 3-D plot.
where Aeff is the effective mode area in m2 and n2 is the nonlinear index of refraction in
m2/Watt. For fused silica, n 2 = 3.2 x 10-20 m2 /Watt. Note that Eq. (2.4) is in a retarded
coordinate frame which moves at the group velocity of the pulse, determined by k', the
first derivative with respect to frequency of the propagation constant k(co) .
One solution to the NSE is a soliton:
u(t, z) = A sech
exp (ik" z)
(2.6)
where A is the amplitude of the pulse such that IAI2 is normalized to power and r is the
width of the soliton such that 1.763 x
= tFWHM. Pulse width is defined as the Full-
Width at Half-Maximum (FWHM) of the intensity of the pulse. Notice that a soliton is
chirp-free, i.e. its phase does not vary with time, only with propagation distance. A simple
simulation of a soliton in a lossless fiber is shown in Fig. 2.11. The top trace shows the
soliton intensity sech 2 shape along with the chirp-free (flat) phase (dashed) as a function
of time.4 The lower trace shows the phase of the soliton as a function of distance. As the
graph shows, the soliton accumulates a phase of 2n in 8 soliton periods (see Eq. (2.8)).
One property and a few definitions are helpful and given here. Solitons have a fixed
"area" property. The soliton area is fixed by the material parameters:
soliton area = At =
(2.7)
where the sign of k" must be negative since i > 0 for an optical fiber. Thus, optical solitons in fibers only exist in the anomalous GVD regime (k" < 0).
The soliton period is defined as the distance in meters in which a soliton acquires a 7t/4
phase shift. It is given by:
Z=
)2
10
6
(2.8)
4. Note: the phase is only relevant across the center portion of the pulse. The portions of the pulse
which have very low intensity may not have a flat phase due to numerical error.
_71
a,
CO
uM
C
0
Normalized time
Normalized time
-
1.5
C
1
t--
0.5
n
0
1
2
3
4
5
6
7
8
Distance in soliton periods
Figure 2.11: Fundamental soliton. Top trace shows the soliton intensity
and phase vs. time. The lower trace shows the soliton phase as a function of
distance.
where A is the carrier wavelength in meters, c is the speed of light in m/s, and D is the
GVD in units of ps/nm/km (see Eq. (2.11) below). The power for a single first order
(N = 1) soliton is
P
N=1
=
XAeff
Aef
(2.9)
4n 2
2.9)
Fig. 2.12 shows a plot of the soliton period z0o and the soliton peak power PN=1 as functions of pulse FWHM for typical values of fiber dispersion D. The wavelength and effective area used are X = 1.55Ltm and Aeff = 50gtm
2
It is interesting to note that the Fourier transform of a sech-shaped pulse is a sechshaped spectrum:
(2.10)
fei'•sechtdt = rsech( Q)
and that the time bandwidth product of a soliton is
VFWHM refers to the spectral FWHM.
FWHM
X VFWHM =
0.314 where
8oo
E
o
600
N
O
a(
DL
400
O
Co
200
C
o
20
z
0L
15
0
10
a)
o
O,
10
12
14
16
18
20
soliton FWHM (ps)
Figure 2.12: Soliton period and peak power vs. FWHM for various values
of fiber dispersion.
Note also that the relationship between k" and D is as follows:
(2
(2.11)
k" = -D×x
2nc x 106
The dispersion curves for typical optical fibers is shown in Fig. 2.13. The figure shows
profiles for standard, dispersion-shifted, and dispersion-flattened fibers.
2.3.2 Master equation
In reality, an optical fiber does not contain only nonlinearity and dispersion. A more complete Master Equation is:
1.1
1.2
1.3
1.5
1.4
1.6
1.7
Wavelength ({pm)
Figure 2.13: Dispersion profiles for standard, dispersion-shifted, and dispersion-flattened fibers. D > 0 is anomalous. From Ref [7].
lau + iKr2 ul 2 u + (g
.ik"
au
2 at 2
az
-cRr
- 1)u +
LFt2
2iA•-
A(2JU
F2L, t2 tt
2
alI
at
u+
1
6
l
•u
(2.12)
+S
t3
Here, the terms on the RHS are: (group velocity) dispersion, Kerr nonlinearity, gain and
loss, filtering, Raman effect, and noise. The symbols are tabulated in Table 2.2. In
Sec. 2.4, I will briefly summarize these additional effects which impede soliton transmission.
Symbol
Meaning
z
propagation distance in m
t
time across pulse in s
u
slowly-varying envelope, function of z and t, in /W
k"
group velocity dispersion in s2 /m
K
-1
SPM coefficient (nonlinearity) in m-2W
Table 2.2: Summary of symbols in the Master Equation, Eq. (2.12).
Symbol
Meaning
S
noise in W/m
g
gain (periodic) in m -1
1
fiber loss in m -1
cR
Raman coefficient in s
r2
path-averaging coefficient
k'"
third-order dispersion in units of s3 /m
Table 2.2: Summary of symbols in the Master Equation, Eq. (2.12).
2.3.3 Path-averaged solitons [59]
A soliton typically undergoes many perturbations as it travels in a long-distance system.
The most obvious ones are loss (due to the loss of the fiber, as well as lossy components)
and gain (from the EDFA's). If the gain media are spaced with spacing LA such that
LA <<Z0 , the
soliton shape and pulse width can remain invariant. Only the soliton peak
power varies due to the loss and gain. This is called path-averaging and it is shown in
Fig. 2.14. The idea is to keep the average soliton power equal to a fundamental N = 1
soliton. Thus, an appropriate input power must be selected:
aLA
Pinput =
1 - exp(-aLA)
(2.13)
N= 1
where a is the power loss and PN= 1 is given by Eq. (2.9).
2
Average power
01
CL
Lr
00
II
II
I
I
100 200 300 400 500
0
I
0
I
I
I
I
I
I
I
I
I
100 200 300 400 500
distance
distance
(a)
(b)
Figure 2.14: Path-averaged soliton. (a) shows the pulse power; (b) shows the
pulse width, both as functions of distance.
The nonlinearity accumulated over each amplifier span is then proportional to the
path-averaged power, which can be set to be equal to that of a unit soliton. Thus, the normalized, path-averaged NSE becomes:
Du
8(z)
az
2
2
U
at
(2.14)
2Ui2
2
where the path-averaging factor r2 is given by
2
r =
1-e
-aL A
(2.15)
aLA
and 8(z) = 1 is the path-averaged dispersion.
2.3.4 Soliton perturbation theory [107] [108]
Soliton perturbation theory is a powerful tool to analyze soliton behavior in the presence
of perturbations. The perturbation theory which is briefly reviewed here has been developed by Haus and Y. Lai [107] and by D. J. Kaup [108]. It begins with the equation of
motion for the perturbation, the Perturbed NSE (PNSE) [62]:
Au + -iDp 2
Au = iD dAu + 2r2 K uo Au + r KuoAu
+ P(t)u + S(z, t)(2.16)
where D is the dispersion, p is the frequency of the soliton, r2 is the path-averaging factor,
icis the Kerr coefficient, P(t) is the perturbation, and S(z, t) is due to the noise. The electric field in the presence of the perturbation is given by u(t, z) = uo(t, z) + Au(t, z),
where u0 is the soliton pulse and Au is the perturbation. The soliton pulse is given by:
u0 (t, z) = Aosech(t
x exp [-i ( - pt + Dp2 z - Dz+
]
(2.17)
where T = To + 2Dpz where To is the initial position and 0 is the phase. The amplitude
A o is related to the energy, w, (also known as photon number, n) through:
2
2AoT = w
(2.18)
We assume that the perturbation Au(z, t) can be expanded in terms of the four expansion functions. Thus,
Au(t, z) = Aw(z)f,(t) + AO(z)fo(t) + Ap(z)f,(t) + AT(z)fT(t) + U,
(2.19)
where Aw, AO, Ap, AT are the soliton energy, phase, frequency, and position. The last
term uc represents the continuum. The expansion functions are given by:
f,(t) = -1-1
(2.20)
tanh(- IAosech(-
fe(t) = -iAosech(2
(2.21)
f,(t) = itAosech(f)
(2.22)
f,(t)
= Itanh
(2.23)
- Aosech -)
where fi(t) are solutions of the linearized NSE without the noise. The expansion functions are plotted in Fig. 2.15. The adjoint solutions are given by
f
fo(t) =
)-
(t) = 2Aosech
2
f (t) = i-2 tanh (Asech
f (t)
2
=
-tA 0 sech
-
(tO
I.
(t) :
(2.24)
)]Aosech(J
)[ 1 - (t)tanh(I
f
(2.25)
(2.26)
(2.27)
The expansion functions and their adjoints form an ortho-normal set which satisfies
the relation:
ReJf fjdt = 8ij
(2.28)
__
1.0
0.0
0.8
-0.2
--
0.6
-0.4
0.4
0.2
-0.6
0.0
-0.8
-0.2
-10
-5
0
5
-1.0
-10
10
-5
0
5
10
5
10
time
time
0.6
0.4
0.2
0.2
0.0
0.0
-0.2
-0.2
-0.4
-0.4
-0.6
-10
-5
0
5
10
-10
-5
time
Figur e 2.15:
0
time
Expansion functions for soliton perturbation theory.
where i, j = w, 0, p, T. To obtain the z-dependence of the soliton parameters, the
expression for Au, Eq. (2.19), is inserted into Eq. (2.16). Then, the adjoint functions, Eq.
(2.24)-(2.27), are used to project out the motion of the coefficients using the orthogonality
relation given in Eq. (2.28).
2.3.5 Inverse scattering theory [105] [106]
In 1971, Zakharov and Shabat used Inverse Scattering Theory (IST) to solve the NSE
[105]. In this method, searching for the soliton solution to an arbitrary NSE reduces to
searching for the potential wells u(t) that do not reflect coupled waves v1 and v 2 of any
wavelength ý incident upon the wells [106]:
dv1 + u(x)v = V
i-d
2
d
dt
+ U*(X)
=
1v
(2.29)
2.
(2.30)
The wells have complex poles of the reflection coefficients in the p-plane,
ji
i + irli
and residues c i . The well at z = 0 is given by:
N
u(t) = -2
k* /2k*
Y
(2.31)
k=
where
,j =
cjexp(i jt)
(2.32)
and
= 0
l,VJ2k*
Vij +
k= 1 jk
(2.33)
1
V2j* -I
V k
k= 1
-
=
j*
k
The fundamental soliton 21 sech(2rjt) corresponds to a single pole,
= il.
[ A
change in carrier frequency is denoted by a finite value of ji.The soliton shape is obtained
by the expression for u(t) except X1 is replaced by:
Xj =
jexp{- rlj(t + 24jz) + i[Vjt + (
2
.
- T_)z]
(2.34)
2.3.6 Soliton wavelength-division multiplexing [36]-[49]
Wavelength-division multiplexing with solitons is one way to increase the total amount of
data transmitted in a communications system. Since solitons are not required to travel at
the zero dispersion wavelength, unlike NRZ pulses, games with dispersion are (in principle) not required. Hence adding WDM channels is, in theory, very easy. There are, however, several issues which must be examined when using WDM with solitons. These are
briefly discussed in this section.
The first issue is that of timing shifts. Recall that one of the properties of solitary
waves is that they emerge undamaged from "collisions." The solitons are able to maintain
their shape. However, a WDM collision does result in a small equal but opposite timing
shift for each of the pulses. If two WDM'ed solitons, at wavelengths X1 and 12 enter a
lossless optical fiber, they will propagate at different group velocities. The solitons may be
positioned so that they will pass through, or "collide" with, each other in the fiber. Such a
collision is what was shown in Fig. 2.10.
The soliton WDM collision can be quantified as well. The collision length, Lcoll is
defined as [37]:
(2.35)
Lcoll = 0.6298
where z0 is the soliton period, t is the soliton pulse width, and Af is the frequency separation between the soliton pulses. There is no net frequency shift of the solitons, but they do
undergo a timing shift given by:
Atnorm
4
4
=
2
(A 1norm) + 1 (Ao norm)
0
(2.36)
Note this expression is in normalized units. To convert between normalized and real units,
the following conversions must be used:
At = Atnorm xt
Recall
t
and
A
o= Acnorm/T.
(2.37)
is related to the FWHM by tFWHM = 1.763t.
However, if any effect is present in the fiber which asymmetrizes the collision, the solitons will not emerge unscathed, as there will be a residual net frequency shift remaining
from the interaction. Such perturbations include loss, gain, discontinuities in dispersion, or
the Raman effect. An example of such an asymmetric collision is shown in Fig. 2.16. This
figure shows a WDM collision in the presence of a strong Raman effect (see Sec. 2.4.2). In
this case, the input is two equal amplitude solitons but the output clearly is not! In a communications system, since bit patterns are random, such asymmetric WDM collisions can
degrade system performance by affecting pulse timing (see Sec. 2.4).
The way around this problem is to ensure that the collision distances are long enough
compared to the perturbation distance so that the deleterious effects average out. Mollenauer et al. [37] found that if the length Lpert satisfies the following relation:
Cc
o
"_
(a)
0
C.)
o
0
0
0
Time (normalized)
(Z 0.
0E
o
C-C
V0.
(b)
-,
0.
2.
20
Figure 2.16: WDM collision in a fiber with Raman effect. Notice that the
collision now becomes asymmetric. (a) shows contour plot; (b) shows 3-D
plot. Compare to Fig. 2.10.
Lcoll >
2
Lpert,
(2.38)
then, the asymmetries and velocity shifts are negligible.
Note that the result given in Eq. (2.38) was obtained in 1991, before the realization of
soliton control methods (Sec. 2.5). For example, if dispersion tailoring (see Sec. 2.5.4) is
employed as a method of soliton control, the fiber becomes essentially lossless and WDM
collisions with wide soliton pulses are near perfect.
2.4 Limits on soliton transmission
One may think, to achieve an ultra-long distance high bit-rate transmission system, it is
simply enough to shorten the soliton pulse width enough such that a high data rate is
achieved. Unfortunately, it is not as simple as this. There are various effects which come
into play when solitons become temporally short or must travel long distances. This section reviews some of these limitations.
Before discussing the effects which limit soliton transmission, it is necessary to introduce the concept of bit errors. Bit errors in soliton systems are primarily caused by timing
errors, rather than a combination of timing and amplitude errors. In order to obtain a certain Bit Error Rate (BER) in a detection window 2t, (where 2t, is the length in time of
the window) we require:
(AT 2)
(,)2
(2.39)
where (AT 2) is the mean-squared timing jitter of a random sequence of bits which have
travelled down a fiber. The BER is defined as:
BER = erfc(•
J2
(2.40)
Thus, in order to obtain a BER=10 -9 , or 1 error in 109 bits (a typical requirement), we
require a = 6.1. The function given in Eq. (2.40) is plotted in Fig. 2.17.
2.4.1 The Gordon-Haus effect [51]
The first deleterious effect to discuss is the Gordon-Haus effect. The Gordon-Haus effect
arises from Amplified Spontaneous Emission (ASE) noise generated by the in-line ampli-
10-4
n-110 -6
W
S
Cr
10
-8
-10
o
10-
.
10-12
10-14
3
Figure 2.17:
4
5
6
7
8
BER vs. (. A plot of Eq. (2.40).
fiers in a soliton transmission system. The ASE noise affects the soliton frequency randomly and then couples back to the soliton position through dispersion. The perturbation
theory method outlined in Sec. 2.3.4 above can be used to give expressions for the equations of motion of the timing and frequency of the soliton pulse [51] [62]:
-AT(z)
dz
= 2DAp + ST(z)
(2.41)
= SP(z)
(2.42)
dAP(z
Using Eq. (2.41)-(2.42) and Laplace transforms, we determine the mean-squared timing jitter for the soliton to be [118]:
(AT 2 ) =
2(.•N
3ntr
6
(2.43)
where NN is given by:
NN
2Ff
2
(2.44)
r
and where F is the fiber (amplitude) loss in units of inverse distance, P is the noise figure
of the amplifier, and f is the path-averaged noise factor [58] defined as:
f =
)
(G - 21
2
G In2G
(2.45)
where G is the power gain of the amplifiers.
2.4.2 Self-Raman effect [50] [65]
The soliton self-frequency shift, or the Self-Raman Shift (SRS), is another effect which
leads to timing jitter. The initial theoretical treatment of SRS was done by J. P. Gordon
[50], and its effects on long-distance soliton transmission was done by Moores et al. [65].
It is caused by the Raman gain of the fiber, a nonlinear effect in which waves interact via a
time-dependent Kerr effect. The net result is that the soliton down-shifts (red-shifts) in frequency. The Raman effect depends on the pulse energy, w, and the frequency shifts in a
predictable way. However, in the presence of noise, the pulse decelerates and accelerates
randomly. This leads to an additional source of timing jitter. The Raman term appears in
the NSE as the fifth term in Eq. (2.12). Note that cR is the Raman coefficient, typically
2.4 x 10-15 s. The SRS effect generally becomes important at very high bit rates (short
pulses) which travel for long distances, thus it is not a concern in this thesis.
2.4.3 Third-order dispersion [65]
Another deleterious effect is Third-Order Dispersion (TOD), or the finite slope of the dispersion versus frequency curve. TOD is represented by k'" (see Eq. (2.12)). Timing jitter
caused by TOD is generally less than that caused by the Raman effect [65]. Typically, the
slope of the dispersion curve for a communications fiber around 1555 nm is on the order
of -0.07 ps/(nm 2 km) [68]. The typical behavior of a pulse in a fiber with very high TOD is
shown in Fig. 2.18 where the normalized TOD is given by k'"/(61k"l) = 1/3. The pulse
sheds continuum due to the generation of a phase-matched sideband. Like SRS, the deleterious effects of TOD are not a major concern in this thesis.
2.4.4 Soliton-soliton interaction [53]
An effect which may come into play as solitons are Time-Division Multiplexed (TDM'ed)
at higher bit rates is soliton-soliton interaction. Soliton-soliton interactions were first studied by Gordon [53]. In short, solitons experience a phase-dependent interaction force
which decreases exponentially with the temporal spacing of the pulses. If the solitons have
the same phase, they attract, or pull together. If the solitons have opposite phases, they
repel. This is shown in Fig. 2.19.
C
C
C
_.oc
C
C
Frequency
Time
Figure 2.18: The effect of third-order dispersion on a soliton. The simulation was run for 3 soliton periods.
Opposite phase
Same phase
3
2
1
A
0
Normalized time
-10
-5
0
5
Normalized time
Figure 2.19: Contour plots of soliton-soliton interaction in normalized
units. On the LHS, the initial condition consists of two same-phase soliton
pulses. These solitons attract. On the RHS, the initial condition consists of two
opposite-phase solitons. These solitons repel.
10
2.4.5 Polarization mode dispersion [55] [74]
Another deleterious effect which causes bit errors via timing jitter is Polarization Mode
Dispersion (PMD) [55] [74]. This effect is a result of the imperfect nature of the optical
fiber itself. In any optical fiber, there will be short lengths with a certain birefringence
resulting in a time delay between light propagating on the slow and fast axes. Timing jitter
due to PMD is caused by the random nature of the orientation of the slow and fast axes
along the length of the fiber.
2.4.6 Piezo-electric effect [57]
The piezo-electric effect, also known as electro-striction or acoustic effect, was first studied by E. M. Dianov and coworkers in 1991 [57]. In this effect, an acoustic vibration, set
up by a soliton pulse passing through the fiber, modulates the index of refraction for the
subsequent pulses. This results in timing jitter. An expression for the timing jitter in a typical fiber due to this effect is given by:
= 4.8D2 R
2
(2.46)
where D is the dispersion in ps/nm/km, R is the bit-rate in Gbps, z is the distance in Mm,
and t is the pulse width in ps [83]. Recently, Pilipetskii and Menyuk have studied how this
effect can lead to correlated errors in soliton systems [83].
2.4.7 Four-wave mixing [84]
Four-Wave Mixing (4WM) is a third-order nonlinear process, like the Kerr effect, where
four fields at frequencies 0o 1 , 0 2 ,
3, and (t4 interact such that:
(2.47)
O) + 0) 2 = 0 3 + 0)4
and so that the total energy is conserved:
h(0 1 + ( 2 0) 3
27t
4+ 4)
= 0
(2.48)
where h is Planck's constant [119]. 4WM among WDM channels causes crosstalk which
can degrade BER's [56].
A recent paper by P. V. Mamyshev and Mollenauer [84] describes the effect of 4WM
on soliton WDM systems. In a lossless fiber in which perfect WDM collisions may occur,
the 4WM components are generated and then reabsorbed. However, in a lossy system with
2Lpert, there may still be uncontrolled growth of
,,
periodic amplifiers, even when Lcol
4WM due to pseudo-phase matching. Thus, when two WDM channels at 01 and
02
= o + Aw
interact,
they
create
frequencies
new
at
(03
= 01
-
A
and
Aw. The presence of 4WM drains energy from the solitons and thus leads to
timing errors. In their paper, the authors also propose a method to combat this effect (see
04= 0
2
+
Sec. 2.5.4).
2.4.8 Periodic perturbations [54] [109]
When a periodic perturbation occurs in a soliton system and its period approaches 8mzo
where m = 1, 2, 3..., a resonant instability occurs [54]. The perturbed soliton does not
satisfy the NSE, so it sheds dispersive wave radiation (continuum) to try to reform into a
soliton. The dispersive waves are phase-matched at certain frequencies according to a
phase-matching condition:
(ksol- kdisp)LA = 2mit
(2.49)
where LA is the period of the perturbation. Recall from Eq. (2.6) that the soliton k-vector
is given by:
ks=
k"
2
2,
(2.50)
and the k-vector for the dispersive wave radiation is given from the linear dispersion relation of the fiber:
kdisp =
2 k"2.
(2.51)
By solving Eq. (2.49) for o), the frequencies at which the dispersive wave radiation will
grow may be obtained:
m
o = 1 -8zo
I
LA
1.
(2.52)
One of the most common periodic perturbations is periodic amplification [109].
Amplifiers are placed periodically in a transmission line to overcome loss, as shown in
Fig. 2.2. Fig. 2.20 shows a results from a simulation with a lossy fiber and periodic gain
with LA = Zo. Both the spectral and temporal profiles show the resonant continuum.
10
0
10-15
S10-10
-15
-10
-5
0
5
10
15
5
10
15
Normalized frequency
100
10-2
10-6
"
1iO•
-15
-10
-5
0
Normalized time
Figure 2.20: Simulation of resonant sidebands due to periodic gain. Shown
are spectral (upper) and temporal (lower) intensities, both on log scales.
2.4.9 Soliton-continuum interaction [113] -[116]
This effect is treated at length in Chapter 3.
2.5 Soliton control
Many researchers have recently been engaged in proposing solutions to the problems
described in Sec. 2.4 in order to push solitons to higher data rates and longer distances.
This section describes the ones most relevant to this thesis and only briefly mentions other
methods.
2.5.1
Filters [61] - [62], [64]
One of the first methods of soliton control was developed by researchers here at MIT
[60][62] and simultaneously by Hasegawa [61]. The principle of filtering for soliton control is simple. If the frequency of the soliton is constrained by a filter, the frequency jitter
caused by ASE noise is reduced. Hence, the timing jitter is reduced, growing only linearly
F
CHAR)
STRUM
SC
FREQUENCY
~-
Figure 2.21: Schematic of soliton control by filtering. (Note: this figure is
from Prof. Haus' archives.)
with distance. This is best seen via soliton perturbation theory. In this case, the perturbation P(t) which one would substitute into Eq. (2.16) is:
(t) = ~
2
2iA
_FLFa2
- -A
(2.53)
t
where K"F is the filter bandwidth, LF is the filter spacing, and Ao)is the initial frequency
detuning of the soliton. Using the methods outlined in Sec. 2.3.4, one arrives at an equation of motion for the soliton frequency:
d
d-Ap(z)
dz
-2
-AP41
1
,
+
SP(z).
(2.54)
3Q•,LF
The additional term in Eq. (2.54) (compare to Eq. (2.42)) serves to damp out the fluctuations in frequency, which in turn reduces the timing jitter. Filters also serve to damp out
the effects caused by third-order dispersion, the Raman effect, and soliton-soliton interactions.
Implementing a soliton transmission system with filters is not difficult. A filter is simply inserted before each amplifier as shown in Fig. 2.22.
LF = LA
Figure 2.22:
Soliton transmission system with filtering.
2.5.2 Amplitude modulation [62] [63]
Amplitude modulation may also be used for soliton control [62][63]. In this case, the soliton's timing is affected directly by modulators which run at the same bit-rate as the soliton
stream. In this case, the perturbation P(t) becomes:
P(t) = RL(coswOmt- 1)
(2.55)
where g is the depth of the modulation and om is its frequency. This gives an equation of
motion for the timing of the soliton which now includes a damping term:
d
dz
2tI
AT(z) = 2DAp - T -1
6
2
mAT(z) + ST(z).
(2.56)
The drawback, of course, is that modulators are, unlike filters, active rather than passive
devices.
2.5.3 Sliding frequency-guiding filters [66]
Using sliding-frequency guiding filters for soliton control is perhaps the most elegant way
to eliminate most cw radiation and noise, while still maintaining the soliton data pulses
[66]. In this technique, the center frequency of the filters is translated linearly with distance. This takes advantage of the nonlinearity of the soliton which allows it to change its
frequency. Thus, the solitons are input at one carrier frequency and emerge from the transmission line with a shifted carrier frequency. This is shown schematically in Fig. 2.23. The
linear waves, however, cannot change their frequency and are thus damped out. This is
evident from perturbation theory which shows that amplitude variations are damped out
[66]. A system with sliding filters thus has the property that it produces a steady state soli-
ton output, as shown schematically in Fig. 2.24. Arbitrary solitons are input but the output
is "standardized."
w0+Ac
/z
Figure 2.23: Sliding-frequency guiding filter principle. The soliton is nonlinear and can generated the new frequencies needed to follow the filter. Noise
is linear and dies out because it cannot follow the filter.
Sliding filters may also have a narrower bandwidth than fixed filters since linear noise
is suppressed, and are therefore more successful than stationary filters or modulators in
suppressing the cw and noise growth. A typical filter of 100 GHz, used with 20 ps pulses is
shown in Fig. 2.25. Since Fabry-Perot filters are typically used, WDM is easily facilitated.
Note the same effect can be achieved by sliding the soliton itself, using an acousto-optic
modulator, for example [78].
Much theoretical work has been carried out on solitons with sliding filters (see Refs.
[66]-[77]). Here, the points relevant to this thesis are summarized. The transmission for
the Fabry-Perot filters is given by:
F(o) =
1-R
1- Rexp [i(co- 2f)-i
(2.57)
OUTPUT
INPUT
Figure 2.24: Schematic of sliding filter action. Soliton pulses of random
heights are input and they are standardized at the output.
where R is the reflectivity of the mirror, d is the mirror spacing, c is the speed of light, and
f' is the sliding rate. Due to the soliton's own inertia, its carrier frequency lags that of the
sliding filter by a small amount, the "lag frequency," given by:
A
3
=
21j3-Of
(2.58)
where 1"is the normalized filter strength per unit distance, given by:
2
S = (18irR
- )R(d\ d 1LF
(1- R)2 I cDL,
(2.59)
and om' is the normalized sliding rate given by
O,
=
•
2
(2.60)
2D
Recall X is the wavelength, D is the fiber dispersion, LF is the filter spacing (which is
always equal to the amplifier spacing in this document), f' is the sliding rate, and t is the
soliton FWHM divided by 1.763.
Due to the third-order dispersion of the Fabry-Perot (i.e. a non-zero third-derivative of
the expression in Eq. (2.57)), there is a slight difference in the lag frequency depending on
the direction of the sliding filter [66] [76]. In the case of up-sliding, this third-order dispersion pushes the soliton back toward the center of the filter, increasing the gain seen by the
1.0
0.8
0.6
0.4
0.2
0.0
-200
0
200
frequency (GHz)
Figure 2.25: Typical in-line filter profile for sliding-filter case with sample
soliton pulse. Sliding filters may have a smaller FSR. The filter shown has an
FSR of 100 GHz. The pulse spectral FWHM is 15.7 GHz (a 20 ps pulse).
soliton. But, in the case of down-sliding, the third-order dispersion pushes the soliton further from the center of the filter, decreasing its gain. Since in the latter case, the soliton
requires more energy (and hence gain) in order to maintain itself, it also experiences more
ASE noise and thus has a larger Gordon-Haus effect. For this reason, using up-sliding filters is slightly better than using down-sliding filters. 5
Parameter
Value
total distance
35 x 286 = 10,010 km
pulse width
20 ps
fiber effective area
50 gim2
group velocity dispersion
0.5 ps/nm/km
fiber loss
0.25 dB/km
Fabry Perot mirror spacing
1.5 mm
Fabry Perot mirror reflectivity
9%
filter sliding rate
+7 GHz/Mm
grid points
8,192
Table 2.3: Simulation parameters for Fig. 2.26.
5. If the absolute value of the filter transfer function is employed, there is no difference between
up- and down-sliding filters.
step size
100 per z0
soliton period (zo)
317 km
amplifier spacing
35 km
Table 2.3: Simulation parameters for Fig. 2.26.
This can be seen clearly in computer simulations shown in Fig. 2.26. In this figure, a
simulation was run with parameters given in Table 2.3. The only difference between the
up- and down-sliding cases shown are the filter sliding directions (even the random noise
injected at each amplifier for each of the 30 simulations done in order to generate the jitter
curve is the same in both cases). In the figure, the top trace shows the energy of the pulse
as a function of distance. The lower trace shows y,the standard deviation of the timing jitter,
(AT 2 ) . As can be seen, the energy and a for the down sliding case are greater than
for the up-sliding case. To maintain the higher energy, a higher gain is required. Thus,
more ASE noise accumulates.
2.5.4 Dispersion tailoring [84]
Dispersion tailoring, a method commonly used with NRZ transmission, has been recently
employed in soliton systems [34]. In NRZ systems, the dispersion is tailored so that it
averages out to zero. However, in soliton systems, dispersion tailoring has a different
objective [52]. The dispersion varies exponentially so that it matches the loss profile of the
fiber. Thus, the fiber dispersion decreases as the soliton power decreases (due to loss). If
the dispersion profile is set properly, it is possible to always maintain a perfect soliton
pulse of the same pulse width.
Recently, Mamyshev and Mollenauer have shown that balancing the dispersion in this
way relieves the problem of 4WM in WDM systems [84]. In order to achieve the dispersion-decreasing fiber, typically three fibers of appropriate dispersion values were spliced
together. This three-step approximation works very well.
2.5.5 Alternative methods
Alternative methods do exist for suppressing the various effects that cause soliton timing
jitter and lead to bit errors. Here, I tabulate some of these alternative methods without
going into details (see Table 2.4).
LO
r
x
1>
-
18.5
18.0
17.5
17.0
16.5
16.0
15.5
1.0
0.8
0.6
0.4
0.2
0.0
0
2
4
6
8
distance (Mm)
Figure 2.26: Up-sliding vs. down-sliding. Top trace shows the pulse energy
as a function of distance. The lower trace shows the timing jitter as a function of
distance.
Alternative methods of soliton control
Reference
phase conjugation
[82]
dispersion compensation
[80]
phase-sensitive amplifiers
[79]
nonlinear loop mirrors
[75]
saturable absorbers
[81]
Table 2.4: Alternative methods of soliton control.
Chapter 3
Soliton-continuum
interaction1
This chapter treats the interaction of a soliton with continuum. In this document, continuum refers to any non-soliton radiation in the system. Generally speaking, in this context,
continuum has a negative effect on the system. One example of soliton-continuum is the
sideband generation due to phase matching of solitons and dispersive waves in periodic
transmission systems (see Sec. 2.4.8) [109].
The chapter begins with an example of how continuum affects solitons as they propagate in a lossy fiber with periodic amplifiers as well as a review of Gordon's formulation
[110]. Then in Sec. 3.2, the effect of a sinusoidal wave packet on a soliton is analyzed by
setting up the two-soliton solution using the method developed by Zakharov and Shabat
[105]. Here the analysis is generalized to obtain the phase shift and the position change at
every instance of time during the collision. It is found that during the collision there is a
continuous change of soliton position and phase, and a perturbation of the colliding wave
packet that corresponds to Gordon's associate function. From this result one may infer a
velocity change of the soliton that turns out to be proportional to the local intensity of the
1. Portions of this work are published in Ref. [116]. The work also presented at the Conference on
Lasers and Electro-Optics,May 1995 [114] and also at the Conference on UltrafastTransmission
Systems in Optical Fibres [113].
perturbing soliton, hence a second order effect. This result is generalized by applying it to
wave packets of low, but arbitrary shape of the intensity profile. It is found that low intensity wave packets pull the soliton in the direction opposite to the travel direction of the
wave packet. 2 The analytic results are confirmed by computer simulations given in
Sec. 3.3. Sec. 3.4 contains simulation results from similar effects in WDM systems.
Sec. 3.5 gives a summary of the chapter.
3.1 Background
This section reviews necessary background material. It begins with an example of solitoncontinuum interaction in Sec. 3.1.1. Then, Sec. 3.1.2 reviews Gordon's theory.
3.1.1 An example
In this section, an example of how continuum may affect soliton pulses is examined. Simulation parameters are given in Table 3.1.3 Note that the normalized filtering parameter is
defined as:
Normalized filtering
1
(3.1)
2
92FLFT
where
2
-F
is the filter bandwidth in rad/sec; L = LA =
the amplifier spacing; and
t
0
is the filter spacing, equal to
is the (normalized) soliton pulse width. The case examined is
that of a bit-pattern 01o111 (which is time-shifted such that the 1st ZERO bit is distributed
half-and-half on either side of the simulation window) propagating in a lossy fiber with
periodically spaced amplifiers, as shown in Fig. 3.1. Simulation results are shown in
Fig. 3.2 and Fig. 3.3. The figures plot the initial condition (dashed line) and the pulse train
for various distances. As can be seen, dispersive waves are generated and move away from
each pulse in both directions. It is found find that continuum generated by a pulse does not
affect the pulse itself. However, it may affect neighboringpulses.
Fig. 3.4 shows simulation results for as a function of propagation distance (maximum
distance of 100 soliton periods or 7.5 Mm). Fig. 3.4 also shows simulation results of the
2. E. A. Kuznetsov and A. V. Mikhailov, in their paper "Relaxation oscillations of solitons" in
J.E.TP.Lett. 60, pp. 486-490 (1994), obtained similar results.
3. Note that the amplifier spacing is approximately equal to the soliton period and there is very little filtering. These are not parameters one would wish to use in a "real" system, but they have been
used here to illustrate soliton-continuum interaction.
a)
E
4d
AI!suGIu!
0
N
O
0O
O
N
II
-J
II
0
4
Al!suelu!
,,n
1U
10-2
3~ 10-6
a- 10-8
CI
IAU
L
10-4
10 -2
.
.
10 6
10
1oiU°
,,V
10-2
10-4
o
10.
10-8
10-10
-500
0
500
Time (ps)
Figure 3.2: Evolution of continuum. Shown are log plots of bitpattern vs. time for various distances as marked.
100
10-2
10-4
0
10-6
10-8
s
10O
10- •1 t,11t,,I
1U
10"2
10-4
010-6
10-8
e
10o
104 I"lU
IU
10
10-4
10 .6
10"
10-10
-500
0
Time (ps)
Figure 3.3:
Part II of Fig. 3.2.
500
I '
I
'
I
'
LO
4.0
0
17# JO IV
Io
oa
r:
E
2t
v
CD
e
co
DMC) =,
a
-a
0°
i
00
C
a
0
-V
E
e-
C#JolIV
E
LO
-0'
0)
E
Lo
0
I
c0 0
.
I
0
0
(_0 I x M) JMd
C:
L# JOl IV
E3
o
oC0~
30
cv o
Z# Jol IV
.
o
0
0t-
I
,o
0C:
cz
-#*p
.c
in
~
0
Parameter
Value
FWHM
10 ps
D
0.5 ps/nm/km
Soliton period, zo0
- 78 km
Bit spacing
30 FWHM's
Normalized filtering
1.11 x 10-7
Aeff
50 gm 2
Fiber loss
0.25 dB/km
Amplifier spacing, LA
75 km
No. of grid points
16,384
Temporal window size
180 FWHM's
Table 3.1: Simulation parameters for figures Fig. 3.2 - Fig. 3.6.
timing deviation of each pulse, At(z) = t(z) - t(z = 0), as a function of distance. The
pulse deviations are close to 2 ps, which is nearly 20% of the pulse width. Fig. 3.5 shows
the input and output pulses for this case.
1U
0
10- 1
10
10
-2
-3
10
-4
10
-5
10
10
-6
-7
1 ( -8
-900
-450
0
450
900
Time (ps)
Figure 3.5:
Table 3.1.
Input and output pulses for case with parameters given in
As a comparison to the case depicted in Fig. 3.4, the reader is referred to Fig. 3.6. This
figure shows the results from a simulation using the same parameters as in Table 3.1, with
the exception that the fiber is lossless (thus, there are no periodic perturbations).
Fig. 3.4(a) shows the initial condition as well as the pulses after 7.5 Mm of propagation.
Fig. 3.4(b) shows the timing of the pulses. The pulses do not move at all (as can be seen in
Fig. 3.4(a)); in fact the largest excursion is x10 - 5 ps. In addition, the background (due to
computer noise) is almost non-existent!
Looking at these simulation results allows us to draw a few conclusions:
(1) The effect occurring in the simulation with a lossy fiber and periodically
spaced amplifiers is not soliton-soliton interaction. Soliton-soliton interaction is also unlikely to occur in this particular case since this effect drops
off as an exponential function of the pulse spacing. The pulse spacing of 30
FWHM's is large enough to preclude this as a possible explanation.
(2) Continuum shed by a pulse does not affect the pulse itself. This is evident
from Fig. 3.4(b). Pulse #1, which experiences only its own continuum,
does not move at all.
(3) Continuum shed by a pulse may affect neighboring pulses. The pulses
which are affected most by continuum are pulses #2 and #4 as they have
the large timing shifts shown in Fig. 3.4. These pulses experience their own
continuum (which does not affect timing) and continuum from only one
neighboring pulse (due to the propagation distance selected).
(4) The tendency is for the pulses to initially move towards the pulse which
sheds continuum. Thus the force is attractive.This is evident from the fact
that both pulses #2 and #4 initially move towards pulse #3.
(5) If a pulse is symmetrically placed between two pulses, it may not experience any timing shifts. This is the case with pulse #3. It experiences continuum shed symmetrically from both neighboring pulses. Hence it remains
stationary.
The reader should note that an experimental example of soliton-continuum interaction
may be found in Ref. [112].
10-5
10-10
o
(a)
10-15
10-20
-500
0
Time (ps)
500
1000
a_500
E
CO
5
(b)
0
-500 -1000
0
2
4
Distance (Mm)
6
8
Figure 3.6: This case is to be compared with that in Fig. 3.4. The parameters used are the same as given in Table 3.1, but the fiber is lossless; hence,
there are no periodic perturbations. (a) shows initial (dashed) and final
pulses. (b) shows the pulse timing as a function of distance for each of the
pulses.
3.1.2 Gordon's formalism [110]
J. P. Gordon of Bell Labs has developed an analysis of dispersive perturbations of the NSE
which does not use the obscure notation of the IST. In this section, a summary of the
aspects of Gordon's treatment which are relevant to this thesis is given.
Gordon writes the NSE as:
2
--
=
+1u" 2
(3.2)
2at2
tz
which is in normalized units (see Appendix A and Chapter 2). The single-soliton solution
to the NSE is:
us(z, t) = Asech(At- q)exp(- iQt + iO)
(3.3)
where A is the amplitude, K2 is the angular frequency, q is related to the pulse timing, and
0 is the phase. Recall from Sec. 2.3.4 that a soliton is completely characterized by its
amplitude, frequency, timing, and phase.
Suppose our field consists of a soliton part, given by u, (in Eq. (3.3)), and a small perturbing field, up. Now, the total field is given by u = u, + up. If this expression for u is
substituted into Eq. (3.2), and the result is linearized, one obtains an equation of motion
for up . This linearized propagation equation for the perturbing field is given by the PNSE
(Perturbed NSE - compare to Eq. (2.16)):
2
-au
az
a=up+ 2UsI2 Up +UUp .
2at'2
S
(3.4)
Gordon then linearizes the general IST solution with respect to the radiation field in the
presence of a single soliton. He obtains the following description of the solutions of Eq.
(3.4):
f -+ yf
Up(Z
2f*
f
+2
u,(z, t) =
(3.5)
(3.5)
where f(z, t) is any solution to the linear dispersion equation:
2
-if
az
1a f
2at 2
(3.6)
and where
y = -[usI (usl/t)]
= Atanh(At-q)- iQ .
Gordon calls f(z, t) the "associate field" to u,(z, t).
(3.7)
Using Eq. (3.3) and Eq. (3.5), Gordon shows that
2
Re(us*, Up) =
(3.8)
• 2 Re(u,*, f)
and
Im (u*,P = - -aIm us* 't
tP)
)
(3.9)
t2
"
Thus, if the associate field is known, one may be able to use Eq. (3.8) and/or Eq. (3.9) to
solve for the perturbing field, u,(z, t).
Gordon gives an example of a stationary unit soliton with A = 1 and Q = q = 0
which is perturbed by a wave-packet. In this case, we have:
(3.10)
f(z, t) = Jdoef(o) exp(- iont and
2
Up(z, t) = fdoup()exp(- int i-
.
(3.11)
Gordon first assumes the wave-packet contains only positive frequencies and that it is initially positioned behind the soliton (positive time) at position Za. As the propagation distance is increased, the packet will propagate through the soliton and end up in front of it
(negative time) at position Zb. If the wave-packet begins and ends far from the soliton,
then y = 1 and us = 0 in Eq. (3.5) and this gives:
ip(Za, (0) = (0 - i)2f(m).
(3.12)
After the wave-packet has passed through the soliton, y = -1 but again us = 0. This
gives a result similar to the one in Eq. (3.12), but with (c + i) instead of (w - i) . Combining the results gives:
~(0
Up(Zb, 0) =
+ i 2 -2
) UpZa,C).
(3.13)
Thus, from Eq. (3.13), it is evident that the spectral intensity is the same before and after
the wave-packet passes through the soliton. It is the changes in frequency which lead to
timing shifts.
From this result, one may be led to believe that a sinusoidal wave packet, colliding
with the soliton, does not change the position and/or frequency of the soliton. However,
one must be careful in drawing this inference. This is the case because this theory is only
first-order in up (i.e. the linearized version of the PNSE is used). Even if the wave-packet
were to change the position and frequency of the soliton to first order, this effect would be
of second order in the PNSE and would automatically be dropped from the equation. Thus,
the associate function is the correct first order solution to the PNSE, even if the soliton
were to move away from its perturbed position and frequency to first order in the perturbation. To find the perturbation of the soliton one has to resort to a different approach
which will be described in this chapter.
3.2 Theory 4
We begin our analytic theory in Sec. 3.2.1 by using the inverse scattering solution (see
Sec. 2.3.5) to the two-soliton problem where the two solitons are detuned relative to each
other. This has been done before; we only use this as a starting point to obtain further
results. We make the amplitude of the perturbing soliton very small, and expand the result
in terms of this amplitude in Sec. 3.2.2. In Sec. 3.2.3, the results are shown to be changes
of amplitude and phase of the perturbed soliton and changes in the perturbing wave that
are analogous to Gordon's associate function, described in Sec. 3.1.2 [110]. Finally, the
theory is generalized for a soliton colliding with a general wave-packet in Sec. 3.2.4
3.2.1 The two-soliton solution
The two-soliton solution is determined from the pole locations and the residues in the
inverse scattering approach [105]. We assume two poles, ýj = ill, and
irl2 + i52,
where ý2 represents the pole of the perturbing soliton. The relative frequency separation
ý2 =
between the two solitons is Q2 = 22 . The parameters kj are constructed from the residues cj by the procedure given in Refs. [105] and [106]:
4. The theory was done by H. A. Haus.
-
S=
lj(t + 2z)
+ i[jt + (
(3.14)
(3jexp{
- 1)Z]}.
We follow the notation of Ref. [106], except that we make the following change in notat and t -- z. The solution is constructed with the
tion for the independent variables: x -
wave functions { V2k* } as follows:
u(t, z) = -2 Y
(3.15)
kk*y2k*.
k=
The wave functions { y2k* } are determined from the equation:
I
r\
h*2
S= 1, k =
(j*
- •k)(k
kI*W2
-
j
+
2j
ji 2.
(3.16)
From here on, we wish to simplify the notation. We define the following symbols for convenience:
1 2 214jxj
;
X*W 12 - YI
With this simplified notation, it is clear from Eq. (3.16) that the quantities yl and Y2 obey
two equations, j = 1, 2 that can be solved and substituted into Eq. (3.15) to obtain the
double-soliton solution. It is helpful to write out Eq. (3.16) in matrix form:
Ally, +A12Y2
(3.17)
= 2rllx,
+ A22Y2 = 2112 x 2 ,
A21Y
(3.18)
with the matrix elements defined as:
A,1 =
+lxl"
-
4rll12
41 2
A1 2 = 2T11(- IX
i5*
A 21 = 212
2
+X2)
(3.19)
i8)
(3.20)
i * + IX2
(3.21)
(_i8*
i8
A 22 = 1 + -41ll12X2
2
+
(3.22)
2.
The solution for u(t, z) in Eq. (3.15) is now:
u(t, z) = -
2
(A22 - A21)21 lx + (All - Al2)2rlzX 2
(yl + Y2) = -2
(3.23)
AzA22 - Al2A21
We make one simplification. We standardize soliton #1 by setting T1, = 1/2 and rewrite
Eq. (3.23) accordingly, multiplying the numerator and the denominator by
2
712
. After
sub-
stituting the expressions in Eqs. (3.19) - (3.22) we get:
x 2*
+x
+)2
2X2*
1
1*
+
+
212
x*
-+x*u(tz) 22 2
=
x
x
2
*
--4 T2
4
T2-
- 12
1221
-(3.24)2
2*
X
4i2/
2
i*
8*2
x2
-
This expression is exact. In the next section we adapt it to an expansion in terms of the
small parameter 12. Before we do so, we want to look at its limiting form when the two
solitons are very far apart. We concentrate on soliton #1, while soliton #2 is out of the picture; this may be accomplished by setting x2 - 0, or x 2 -
co.
The former case is the case
before the collision when 2 < 0, since then lim x2 = 0. In this case, the colliding soliZ ----00
ton #2 travels from t-4 oo to t - -oo as one proceeds from z -- -oo to z - oo
From Eq. (3.24) we obtain simply:
=-sech(t)exp iZ
-2
u(t, ) =
(1
(3.25)
= u( 1)(t, z).
+X, )
Clearly, soliton #1 is unaffected by soliton #2. When x2 -- o,we obtain from Eq. (3.24):
2
u(t, z) = -2
x2*
[1-+
x,
X(1-
212 2
1-i---
= -2
exp(i68)
exp(3.26)
2112
812) X2
+
(1-2q2/1812)
x*
1-
2
•2"
where 80 = arg[1 - 2r12/(i8)] . This is the standard expression for a first order soliton
phase-shifted by 80, and time delayed by In( 1 - 2]r2/1 12 ), the effect of passage of soliton #2. These effects have already been discussed by Zakharov and Shabat [105]. Note
that to first order in 92,
AO =
4712
and
1 + g2
At
8%2
(3.27)
1 +22'
where 242 = 2 < 0 is the deviation of the carrier frequency of soliton #2 relative to that
of soliton #1. The timing shift is toward positive t, i.e. the colliding soliton coming from
the right has shifted the perturbed soliton to the right simulating an attraction. For positive
a, soliton #1 possesses a phase shift and timing shift before the collision which go to zero
after the collision. The effect of the collision has to be interpreted as the negative of these
initial values.
This may be compared to the exact solution derived from IST:
At = -21n
+
(3.28)
i(1 - 2r 2) .
Q + i(1 + 2r1 2)
A comparison of the expression for timing given in Eq. (3.27), that given in Eq. (3.28), and
simulation data is given in Fig. 3.7. The figure shows a plot of timing results for a WDM
collision of 2 N=l solitons, q1 l =
12
= 1/2. The markers show simulation data, the solid
line is the exact expression given by Eq. (3.28), the dash-dotted line shows a plot of the
second part of Eq. (3.27), and the dashed line shows a common approximation to Eq.
(3.27):
At -
8]]2
22
Q
(3.29)
3.2.2 Expansion in terms of perturbing soliton
Equation (3.24) has terms of both first and second order in
1]2
in its numerator and
denominator. If one wants to construct an expression for soliton #1, corrected to first order
in T12 , one simply expands the numerator and denominator. Note, however, that x2* and
x 2 contain
Ti2
implicitly:
103
102
"o
._.10
E
o
C
E
-1
10
.2
10
0
1
2
3
4
5
6
7
Frequency detuning (normalized)
8
9
10
Figure 3.7: Plot of frequency detuning vs. time shift for WDM collision of two N=I solitons. The exact expression is given by Eq. (3.28).
Approx. 2 is given by the second part of Eq. (3.27). Approx. 1 is the common approximation given by Eq. (3.29).
x2
C2* exp { 212 (t -
z) i-[t +
2
(3.30)
By proper adjustment of the residue we may set Ic2*j/(2r12) = 1, which is simply a
resetting of the time of the perturbing soliton #2. One then has
x2* = exp
- 212 (t- z)- i[t+
2 2712)z +40
(3.31)
where 0 is the argument of C2* and
X2X2 * = exp[-4112 (t + fz)]
(3.32)
Multiplying Eq. (3.24)'s numerator and denominator by x2 , we get to first order in 112 in
numerator and denominator:
1+
u(t, z) = -2
2
2x2
21 21x+ 2
X2X*
+ XI)
. (3.33)
(1
2112 X2X
*+x*
2
+ X21*
xx•I
2
x 2*
2
_2fl2
2X
2+
1- 2
2 1 Ix
i*
When this expression is expanded to first order in 112 , one finds
(3.34)
u(t, z) = u(l)(t, z) + 6u(t, z)
where the perturbation to first order in 112 is:
(
_
Su(t, z)
.z-
4=
_I
1 + Ix2•
2
~
2x,*
I
2Xl*_
x22 1++ I
-*
+
(3.35)
+x
.
--
2
11
+-1+x2
with
1
= -(i +
2
_
_
+1
1
9
+
X1
).
3.2.3 The physical meaning of the perturbation
Now that the soliton perturbation has been determined, we want to write it in a form that
makes the individual terms recognizable. The perturbation given in Eq. (3.35) consists of
two characteristic dependencies:
(a) terms proportional to x2 , exp[-4112(t + z)]exp [-i(it +
z+
, and x2 *.
These terms are associated with soliton #2 and have characteristic time dependences
exp(+ibt).
1
1+
1 +-
X212
on
depend
that
terms
(b)
only
to
according
the
factor:
1
{ - tanh[2L1 2 (t +±z)]1.
I1
2
IX2]
Consider first terms of type (a). The perturbation 8Ua(t, z) is
5Ua(t, Z)
4=12
1 + X2 2
{
X2
2xl*
x2
2
+ i6*
+1
1
X1
(3.36)
(1. 1 J
2
= -2rl2sech[2rl 2 (t + Qz)]e
x
1[2-sech(
L
81
2(t)-2tanh(]
46*2
Closer scrutiny shows that one may write this term in the form
8Ua(t, z) = -2r12sech[21r 2 (t + Qz)]
(3.37)
f(t, z) - tanh 2(t)f(t, z) + u( 1)(t, z)f*(t, z)
x wfýt7(t, z) + 2tanh(t)
where
f(t,z)
f4t, =
1,
2exp
2+
-i Ut+ 2)=4
(3.38)
The function in brackets in Eq. (3.37) is Gordon's associate function, an exact solution
of the PNSE. The sech factor in front of Eq. (3.37) changes the derivatives only to order r12
and thus does not change the character of the solution to lowest order. The perturbation
6
Ua(t,
z) expresses the modification of soliton #2 as it passes through soliton #1. The per-
turbation 8Ua(t, z) leaves soliton #1 unperturbed as can be ascertained by testing them via
projections with the four adjoint functions
f
(t) [107]. One finds for j = w, 0, t, p (the
soliton energy, phase, position, and frequency) that
Re f fj(t)6ua(t, z)dt = 0
(3.39)
-00o
for all four fj(t) (similar to those given in Eq. (2.24) - Eq. (2.27)).
Next, we turn to perturbation (b). The perturbation
Ub(t, Z) =
1 + 112
1
6 ub(t, Z)
can be written as
2
+
(3.40)
x
IX2 L X1
-
22
1+
where we have set rl2 t
=
[-iAsech(t) + tanh(t)sech(t)][ 1 - tanh(2r12i2z)]
0 over the extent of soliton #1. These changes to the soliton can
be recognized immediately as a phase change
AO(z) = =12222 [1 - tanh(2r12Z2)]
+1
(3.41)
4
+1 [1 - tanh(2Ti 2 2z)].
(3.42)
and a position change
At(z) = r12
We should recall that Zakharov and Shabat have shown that a soliton colliding with
another soliton produces a net phase shift and timing shift after passage. Here, we have
found phase shifts and position shifts that vary continuously during the collision.
In order to understand this better, let us explore the time shift in Eq. (3.42) as a rate
process. The rate of change of At with respect to z gives a velocity v(z):
v(z) =
z
At = -4
22
1+
2
sech 2 (271 2 Qz) .
(3.43)
Note that the change in velocity of soliton #1 is proportional to the intensity of the perturbing soliton, a second order effect. It is rather remarkable that we were able to obtain such a
second order effect from a first order analysis.
3.2.4 Collision with a general wave packet
As we have shown, the soliton changes its position because its velocity is perturbed by the
wave packet. This is despite the fact that the pole position is unaffected by the collision,
and the imaginary value of the pole is usually identified with the soliton frequency. From
Eq. (3.43) we have inferred a change of velocity of the soliton that is proportional to the
intensity of the perturbing soliton. The change of speed is a second order effect. The reason that the displacement is of first order is that the duration of the interaction is proportional to 1/112 .
This result suggests a generalization; the exact shape of the colliding wave cannot
affect the end-result. One would expect that the change of velocity of the soliton is proportional to the intensity of the colliding wave packet:
Av(z) =
aAt
= 2
Fz
1+ 0
2
8u(,
t= 0,z) 2 .
(3.44)
Here we use the square of the amplitude of the perturbing wave packet, a sinusoid with a
slowly varying amplitude,
18u(K2,
t = 0,z) , to represent the perturbation. For a narrow-
band wave packet with the carrier frequency ",the displacement should be:
At = J dz At
-oo
2
=
o
|8u(Q, t = O,z)I 2 dz
W
=
(3.45)
2
2
+
where W is the energy in the wave packet. Thus, using Eqs. (3.44) and (3.45), one should
be able to determine the change in position of a soliton colliding with any arbitrary low
intensity wave packet.
When the wave packet is of a broader bandwidth, but still narrow compared with the
soliton bandwidth, we have
At =
J
dW
-1
+- 2
(3.46)
where aW/MQ is the power spectral density of the wave packet. Using Eq. (3.46) along
with the method given in Ref. [116] which allows one to compute an expression for the
continuum generated from various perturbations, one should be able to calculate the timing jitter produced by any arbitrary perturbation.
3.3 Computer simulations
Numerical simulations to verify the theory were performed using the resources at the San
Diego Supercomputing Center (SDSC). In particular, the simulations were run on a CrayYMP. To perform the simulations, either 8,192 or 16,384 grid points are used and simulations are run up to 1,800 soliton periods (with 200 steps per soliton period) so that the collisions are complete (see Appendix B for details on simulation of the NSE).
3.3.1 Two-pulse collisions
optical fiber
input
-- output
-t
Figure 3.8: Simulation setup to observe timing-shifts due to soliton interaction with a sinusoidal wave packet.
In this set of simulations, an N = 1 soliton of normalized width and height equal to unity
collides with another lower intensity pulse. This is shown schematically in Fig. 3.8. After
the collision, both pulses experience timing shifts. However, we only examine the steadystate timing shift of the intense soliton. In the first case we examine, the low energy pulse
is an N = 1 soliton with energy 2a, where a is small. The initial condition is given by
uil(t) = secht + a sech[a(t- to)]e
o- to)
(3.47)
where Q2o is the frequency deviation of the wide pulse from the large pulse, and to is its initial position, which is selected to be large enough so that the collision is complete. In Eq.
(3.47), the first term on the RHS represents the intense soliton and the second term represents the low-intensity perturbation. We vary the energy of the low intensity soliton
through the parameter a. The results of the simulations as well as theoretical predictions
are in Fig. 3.9 where we show results for
QLo
= 1 and
QLo
= 2. We plot parameter a vs.
steady-state timing shift At of the large soliton. The solid line represents theory. The simulation results for the perturbation given in Eq. (3.47) are marked by "X's."
1.0
0.8
0.6
0.4
0.2
0.4
< 0.2
0.0
0.0
0.1
0.2
a
0.3
0.4
0.5
Figure 3.9: The timing shift vs. amplitude of perturbation due to collision
with a soliton (shown by X's) and Gaussian (shown by O's) wave packet of the
same net energy. Theoretical calculations are shown by the solid line.
Next, we collide a unit-height soliton with a low energy Gaussian-shaped pulse. The
initial condition is
Ui 2 (t)
=
sech(t) + a 2 exp -l
-
t e(
(3.48)
where we have set the FWHM and energy of the low Gaussian pulse to be the same as
those of the low soliton in Eq. (3.47) by setting
2
=
cosh -1J2 -1
a
-
a
a2 =
and
t2j
Again, we vary the parameter a for the perturbing pulse (this time a Gaussian). Results are
also shown in Fig. 3.9; the "0" markers represent simulation results from Gaussianshaped perturbations. We tested our theory further by colliding a soliton with a pulse
which is clearly below the fundamental soliton threshold. That is, the initial condition has
the form:
Ui3(t) = secht + a 3 sech[ t
3
e
(3.49)
t)
Here, 73 = 20, while a 3 < t 3 1 varies. These results are shown in Fig. 3.10. The timing
shift imparted to the large pulse is plotted verses a 3 ; theory is depicted by the solid line,
while the markers represent simulation data. As can be seen by the figure, despite the fact
that the colliding pulses are well below a fundamental soliton, the theory still holds.
10
-2
10-3
10-4
10
-5
10
30
20
a 3 x 10-3
40
50
Figure 3.10: The timing shift vs. amplitude of perturbation due to a collision
with a pulse with energy much less than a fundamental soliton. In all cases, the
normalized pulse width is 20 (the pulse width of the perturbation relative to the
main soliton). The X's represent simulation data and the solid line shows theory.
As a further test to our theory, we collide a soliton with an asymmetric pulse. We
selected a Gaussian plus a first-order Hermite Gaussian. The initial condition is given by:
Ui4 (t) =
where Ho
0 ()
sech(t) + a4 Ho(to) + 2 Hi(-•-)e
I4
T4
io(t-to)
(3.50)
= exp(-42/2) and HI(4) = 24H o (,), and x4 and a 4 are selected such
that the energy of the perturbation is equal to 2a, where a = 0.05. We show a normalized
plot of this perturbation in Fig. 3.11 (inset). The computer simulations confirm the prediction of the analytic expression Eq. (3.45) where we have left the z-dependence in explicitly. Fig. 3.11 shows the timing shift as a function of distance, i.e. before, during, and after
the collision. Here we show both simulation (dashed) and theoretical (solid) results. We
obtain our simulation results by simply using the adjoint function f, applied to the field to
project out the timing. Note that the relative phase of the pulses does not affect the steady
state timing shift.
35
45
55
Figure 3.11: The timing shift as a function of distance due to an asymmetric
Hermite Gaussian wave packet theory (solid) and simulation (dashed). Inset
shows the initial perturbation as a function of time.
3.3.2 Three-pulse Collisions
In this set of simulations, we collide a soliton with two low intensity pulses. In one case,
we choose solitons with amplitude a = 0.05 for the low intensity pulses, and in the other
case, they are Gaussian-shaped pulses. In the both cases, the pulses have the same energies
and FWHM's. To illustrate the robust nature of our theoretical predictions, we vary the frequency difference, Ao2
0 between the two low intensity pulses. The pulses beat together
such that each oscillation is less than the width of the large soliton. Note that for
Ao2
0 = 0, both pulses are at Qo = 4, where Q0 is the normalized frequency deviation
from the reference soliton. In addition, at z = 0, both low intensity pulses are at the same
location in time, which is far away from the large soliton. Thus, the collisions occur at
some distance z > 0 and are complete. Fig. 3.12 shows the results. We plot the timing shift
imparted to the large soliton versus the frequency difference between the low intensity
pulses which pass through the tall soliton. The X's represent a collision in which the low
intensity pulses are solitons. The O's represent a collision where the low intensity pulses
are Gaussians. For the soliton case with Ao20 = 0, we have two first-order solitons which
pass through the large pulse. Thus, we have twice the amplitude, or four times the intensity. For this reason, At is four times what we get when perturbing with one low intensity
soliton. This is contrary to what one would get if one simply summed the At's from the
two collisions separately, as this would yield only twice the intensity of one collision. For
the case with very large AQ0 , the two collisions take place separately. In the case of
AO20 = 1.5, the two collisions taken separately would give At = 11.76xl0 - 3 and
At = 6.4x10
3
for 200 = 4 and
0o= 5.5, respectively, totaling to At = 18.16x10
-3
The simulation yields At = 18.26x10W3 . Again as can be seen from the figure, the timing
shift of the large soliton is independent of pulse shape.
3.4 Continuum in WDM systems
This section numerically treats soliton-interaction in a wavelength-division multiplexed
transmission situation. In Sec. 3.4.1, we show that continuum shed by a pulse in one channel can affect the timing of pulses other WDM channels. In Sec. 3.4.2, we show that using
periodic (in frequency) filters, such as Fabry-Perot filters, is worse than using Gaussianshaped filters because of noise growth. These simulations illustrate more examples of soliton-continuum interaction which could be theoretically treated using the formalism given
in Sec. 3.2 and in Ref. [116].
40
C
0
30
S20
10
0
0.0
0.4
0.8
1.2
1.6
Figure 3.12: Collision of soliton with two low intensity wave packets.
Shown is a plot the timing shift as a function of frequency detuning between the
two wave packets. The X's and O's represent a soliton collision with two low
intensity soliton and Gaussian pulses, respectively.
3.4.1 WDM soliton-continuum interaction
In this section, the effect of continuum generated by a soliton travelling in one channel on
a soliton travelling in another WDM channel is numerically investigated. The scenario that
is simulated is shown in Fig. 3.13. The initial condition used consists of two soliton
pulses. Soliton #1 is at wavelength X1 and has its soliton period close to the amplification
length of the system. Thus, soliton #1 will generate dispersive wave radiation (see
Sec. 2.4.8 and Sec. 3.1). Soliton #2, whose timing we will observe, is at wavelength X2
and has a soliton period which is much greater than the amplification length, z02 > LA .
This is accomplished by having different soliton pulse widths for the two pulses; the pulse
widths are related such that
r2
> l. There is no third-order dispersion in the system to
simplify the simulation and to better isolate the resulting effects. Although the simulation
scenario used here is somewhat unrealistic, it does an effective job in illustrating the existence of the effect. The simulation parameters are summarized in Table 3.2.
C3
0
Aco
x
_
Initial Condition
0
Ao= O
0
200
Time (ps)
-200
I
Total distance = 3600 km
ZA
"
o0Ir
x
continuum
jitter
Output
I-
0
(L
*A.
-200
0
200
Time (ps)
Figure 3.13: Simulation scenario: two WDM soliton pulses are input into
a lossy fiber with periodic amplifiers. Continuum shed by one soliton affects
the timing of the other soliton.
Simulation results are shown in Fig. 3.14. The figure shows a plot of the timing for
soliton #2. The solid line depicts the case with a lossless fiber and thus no amplifiers.
Thus, soliton #2 should ideally emerge with a timing shift of -188.3 ps. When loss is
added to the fiber, however, the timing of soliton #2 is affected. In each case, the fiber loss
is maintained at 0.25 dB/km, but the amplifier spacing is varied. Larger amplifier spacing
corresponds to more continuum generation from soliton #1. As can be seen in the simulation results, the continuum shed from soliton #1 does indeed affect soliton #2.
175
I
SI
-Lossless
- -- LA = 20 km
-180
-
S-
LA = 40 km
L = 60 km
LA = 80 km
-185
"
N
_-
-190
-195 L
29'00
I
3100
I
3000
I
3200
I
I
3300
3400
Distance (km)
Figure 3.14: Results from simulation using parameters given in
Table 3.3. Shown is the pulse timing of soliton #2 caused by the continuum of soliton #1.
Parameter
Real value
Norm. valuea
Norm. valueb
Total distance
3600 km
72.5
11.6
D
0.5 ps/nm/km
1
1
X,
1557 nm
-
Ak = X1 -X2
-0.23 nm
-
Aco
0.176 GHz
1.0
2.5
FWHM- 1
10 ps
1.0
0.4
TFWHM- 2
25 ps
2.5
1.0
Atl(z=0)
0
0
0
At 2 (z=0)
-200 ps
-35.26
-14.10
Table 3.2: Simulation parameters for scenario shown in Fig. 3.13 and results
shown in Fig. 3.14 and Fig. 3.15.
3500
Parameter
Real value
Norm. valuea
Norm. valueb
zol
78 km
Tc/2
7/12.5
Z02
488 km
6.257c/2
i/2
Aeff
50 pm2
loss
0.25 dB/km
LA
0 - 80 km
-0 - 0.26
1.6
0-
Table 3.2: Simulation parameters for scenario shown in Fig. 3.13 and results
shown in Fig. 3.14 and Fig. 3.15.
a. Normalized to soliton #1.
b. Normalized to soliton #2.
Fig. 3.15 shows plots of the input and output pulses for the various simulations. The
input pulses are always shown by the dashed line for comparison. Of course, as the amplifier spacing increases, the intensity of the continuum increases as well.
3.4.2 The effect of filter shape on timing jitter
In this section, the effect of filter shape on timing jitter is examined. In this simulation, we
employ sliding-frequency guiding filters which are Fabry-Perot-shaped and Gaussianshaped and compare the results. Parameters for the simulation are given in Table 3.3
below.
Parameter
Real value
Total distance
10,010 km
X
1551 nm
rFWHM
20 ps
D
0.5 ps/nm/km
Aeff
50 pm2
loss
0.25 dB/km
LA
35 km
Iz
317 km
Table 3.3: Simulation parameters for simulations in Sec. 3.4.2.
10.2
10-4
10.6
10-8
10-10
-
10 12
10"14
-300
-200
-100
0
100
200
-300
300
-200
0
100
200
300
200
300
Time (ps)
Time (ps)
-2
10
10.2
-4
10
10-4
10.6
10.6
10.8
10-8
-
10 10
10-10
10.12
10 12
-
"
"
10 14
10 14
-300
-100
-200
-100
0
100
200
300
-300
-200
-100
0
100
Time (ps)
Time (ps)
10.2
10-4
10.6
10.8
10-10
10-12
-
10 14
-3
0
Figure 3.15: Input and output pulses for various amplifier spacings for the
scenario shown in Fig. 3.13. In all cases, the dashed line is the initial condition. The intensity of the continuum increases as the amplifier spacing
increases.
84
Parameter
Real value
Filter bandwidtha
5.4 x 1011 rad/s
excess gain
4.8 x 10-7
No. of grid points
4096
Temporal window size
150
No. of simulationsb
30
Table 3.3: Simulation parameters for simulations in Sec. 3.4.2.
a. This is the bandwidth for the Gaussian filter. The FabryPerot filter is of the same effective bandwidth (d=1.5 mm,
R=9% - see Eq. (2.57)).
b. In order to generate timing jitter curves, Monte Carlo simulations are necessary.
Simulation results are shown in Fig. 3.16. This figure shows the timing jitter as a func-
0.20
C14
0.15
A
1-- 0.10
IVI
11
0.05
2
4
6
8
Distance (km x 103)
Figure 3.16: Timing jitter as a function of distance for two filter shapes.
tion of distance for the case with Fabry-Perot filters (solid) and Gaussian filters (dashed).
As can be seen in the figure, the case with Fabry-Perot filters has more timing jitter. If we
examine the simulation spectrum, we shall see why this is.
Fig. 3.17 shows the output pulse spectrum in arbitrary units for the case with FabryPerot filters. The lower trace shows the filtered output spectrum and the initial condition
E
C•.C
CD
CL
o.}
U)
•c
I
I'
0.8
E
20.6CD)
Cc-0. 4 -
&
x 1012
I
S0.2
1_-
-2.5
-2
-1.5
-1
-0.5
0
0.5
Angular frequency
1
1.5
2
2.5
x 1012
Figure 3.17: Normalized power spectra for simulation for parameters
given in Table 3.3 for the case with Fabry-Perot filters. Upper trace is before
the output filter, lower trace is after the output filter. The input spectrum is
shown by the dashed line.
(dashed). It seems that the additional timing jitter is caused by noise which grows in the
Fabry-Perot transmission peaks.
3.5 Summary
An expansion of the exact two-soliton solution, with one strong and one weak soliton,
gave two contributions. One is the associate function of a wave packet traveling through
the strong soliton. This part of the solution produces no changes of the strong soliton, as it
is orthogonal to the soliton. The other part gives a first order net change of the position and
phase of the strong soliton. The timing shift is always in the direction opposite to the
direction of travel of the impinging wave packet. Even though this shift is of first order in
the amplitude of the weak soliton, it can be traced to a phenomenon of second order.
Indeed, the shifts are the result of a long-lasting interaction. The duration of the weak soliton is inversely proportional to its amplitude. Thus the integrated shift is of first order in
the amplitude of the wave.
From the soliton result it is possible to infer the effect of a sinusoidal wave packet of
arbitrarily shaped envelope. Computer simulations confirm the generalization to arbitrarily
shaped wave packets. In addition, by using the method presented in Ref. [116] to obtain an
expression for the continuum generated by any arbitrary perturbation, one may compute
timing shifts for any perturbation. For a system with periodically spaced amplifiers (similar to the one discussed in Sec. 3.1.1) using typical numbers one would find in an undersea
soliton transmission system, one finds the contribution to the timing from continuum is
negligible. 5
Furthermore, it has been shown that continuum and noise growth may also affect the
timing of soliton pulses in WDM systems. In particular, a case in which periodic perturbations affect a WDM pulse was simulated. In addition, simulations were performed of a
system with sliding Fabry-Perot filters and with sliding Gaussian filters. It was shown that
the case with Fabry-Perot filters suffers from more timing jitter than does the Gaussian
case. This is due to noise growth in the Fabry-Perot transmission peaks (despite the sliding).
5. The author did a quick calculation which revealed normalized timing shifts of 10-22 or so for a
system with LA = 0.1 zo run for a distance of 20 zo. However, a more thorough study must be done.
Chapter 4
Soliton line-monitoring 1
Performance and reliability are two major concerns in undersea cable design [85]. Performance is measured via the bit error rate (discussed in Sec. 2.4). Reliability is measured by
the number of ship repairs necessary during the typical 27-year life of the cable (note that
this excludes faults caused by "external aggression" such as ship anchors and shark bites
[86], which are not under the control of the system supplier). Redundant subsystems are a
part of maintaining reliability. Another part of maintaining top performance is the line
monitoring system. In this chapter, the topic of soliton line-monitoring is discussed. LineMonitoring (LM), or supervisory control, is the procedure by which one determines
amplifier status and performs fault location in a transmission line [102].
Until very recently, a LM system compatible with both optical soliton transmission
with sliding-frequency guiding filters and the "continuous loop-back" approach to LM had
not been addressed. It is essential that this mechanism exists in an undersea cable in order
to locate faults (e.g. broken fibers, malfunctioning pump modules) in the installed system.
The chapter begins with a summary of LM systems for Non-Return to Zero (NRZ) sys1. Most of this work was done during the summer of 1995 at AT&T Bell Laboratories, 101 Crawfords Corner Road, Holmdel, NJ 07733 using the facilities at AT&T. Collaborators are S. G. Evangelides, P. V. Mamyshev, B. M. Nyman, and H. A. Haus. Portions of this work are published in Ref.
[100]. The work was presented at the 1996 Optical Fiber Communications Conference [99]. A
patent application has also been filed [101].
tems. Next is a discussion on why the current NRZ LM system is incompatible with soliton systems with sliding-frequency guiding filters. General issues which arise in soliton
LM are also discussed. In Sec. 4.3, the soliton LM system is presented and is followed by
simulation results in Sec. 4.4. Relevant issues are discussed in Sec. 4.5. Finally, Sec. 4.7
summarizes the chapter.
4.1 Line-monitoring for NRZ systems
Previous work has been done on LM methods for NRZ systems. This section concentrates
mainly on an LM system developed at AT&T which is being used in installed single-channel NRZ undersea transmission lines. Note work has recently been done on WDM NRZ
LM and can be found in Ref. [104].
LINE 1
IN
fihar
EDFA
LINE 1
OUT
LINE 2
IN
LINE 2
OUT
Figure 4.1: Line-Monitoring set-up for undersea NRZ systems. Based upon a
figure in Ref. [104].
A schematic for an NRZ LM system used by AT&T is shown in Fig. 4.1. The figure
shows two transmission fibers, lines 1 and 2, with periodically spaced Erbium-Doped
Fiber Amplifiers (EDFA's). In the figure, the arrowed lines which connect the eastbound
and westbound fibers represent bi-directional couplers. The LM signal used to characterize amplifier status is a low-amplitude (2%), low-frequency (33 Kbit/sec) pseudorandom
modulation which is encoded on the data itself [89] [90]. The signal is looped back with a
45 dB loop-back loss. The output signal is then compared to the original signal and processed in order to determine the status of individual amplifiers [98]. In order to perform
fault location (i.e. a broken fiber), the data channels are turned off and a 100% modulation
is used for the LM signal. The fiber break can be further localized by using Optical Time
Domain Reflectometry (OTDR) by which backscatter is examined [87]. The back-scattered light propagates on the opposite-going fiber (isolators prevent bi-directional propagation on any single fiber) [13].
Fig. 4.2 shows the amplifier pair architecture. Each optical amplifier contains an isolator which ensures that each fiber only carries information in one direction. For this reason,
separate fibers must be used for east and west transmission. Amplifiers are redundantly
pumped, using the configuration shown in Fig. 4.2 [89]. Each erbium amplifier is pumped
using half of each of two 1480 nm pump modules, pump #1 and #2. Thus, if one pump
should fail, the corresponding two erbium amplifiers will each lose only about 4 dB of
gain. Furthermore, the amplifiers are run in compression mode; this means that they are
set to maintain a constant average power output. Thus, if one amplifier has reduced gain
due to a faulty pump, subsequent amplifiers will have larger gains and compensate for the
loss. This makes the system "self-healing" and robust.
As a further enhancement to the LM system, a loop-back coupler scheme as shown in
Fig. 4.3 can be employed [88]. In the figure, two paths are shown: one is the loop-back
path and the other is the reflection path. The loop-back path consists of a fraction of the
forward propagating signal. The reflection path consists of Rayleigh back-scattered light.
The coupler C is arranged so that the reflected path has lower loss than the loop-back path.
Using OTDR and the reflected signal (backscatter), one can determine the exact location
of a fiber break, crack, bend, or splice. In this case, of course, a large signal must be input
in order to clearly observe the reflected signal. Note the OTDR procedure is not a "continuous loop-back" method which works while the line is "in service" since it is employed
only when the cable is down.
Note that other work (both conceptual and experimental) has been done on NRZ LM
systems [91] - [97]. Much of this work uses the OTDR technique or some variation of it.
4.2 Soliton LM issues
In soliton transmission systems where sliding-frequency guiding filters are employed to
combat the Gordon-Haus effect [53], only the nonlinear soliton pulses survive the transmission (see Sec. 2.5.3). In such a system, any modulation imposed on the input data
WH
w
z
w
%mw
zZ3
Reflection
path
Figure 4.3: Coupler configuration to monitor both loop-back and reflection
paths. Coupler C is set so that the reflection path has lower loss.
would surely be lost, as the solitons are "self-stabilizing" and reach a steady-state at the
output, as shown in Fig. 2.24. Thus, the LM methods used with NRZ systems, described
above, will not work. For these reasons, a novel LM system which is compatible with solitons and sliding filters must be devised.
We propose to use a separateWDM soliton channel dedicated entirely to LM. However, even if soliton pulses are to be used for the LM channel, there are still several issues
which must be addressed. We discuss such concerns in this section.
4.2.1 LM channel specifications
The first obvious question is what X, "tFWHM, Pinput, R (wavelength, pulse width, input
power, bit rate) should be used for the soliton pulses in the LM channel? The presence of
the sliding filters restricts the pulse width and power to some extent, depending on the
soliton period, zo, of the pulses used. The sliding filters will only support pulses of a certain pulse width. In particular, the fastest sliding rate for any given pulse width is given
implicitly by:
(Of((FWHM) <
2
(4.1)
an expression which arises from assuming that the system goes unstable if the damping
constant associated with the sliding filter changes sign [66]. Note that r1 is given by Eq.
(2.59) and (of' is the normalized sliding rate (see Eq. (2.60)). Another way to say this is
that if a pulse is too long and has very little bandwidth, it will not be able to generate
enough frequency components to keep up with the sliding filter (as cw radiation is unable
to keep up with the sliding filter). For this reason, it is difficult to employ a LM channel
with pulse width longer than the data pulses. It is also not permissible to use a LM channel
with a very short pulse width, as it will have a bandwidth too wide for the FSR of the
Fabry-Perot filters.
The wavelength of the channel depends on the scheme used, as will become evident
later in this chapter. The bit rate should be low (MHz) so that the LM channel does not
have a high average power and drag down the gain or interfere with the data channels.
4.2.2 Loop-back compatibility with sliding filters
The next issue requires a bit of background. As discussed in Sec. 2.5.3, it is known that upsliding filters (in which the carrier frequency of the Fabry-Perot filter increases with distance) work better than down-sliding filters. Thus, it would be natural to construct a system which employs up-sliding filters for both the eastbound and westbound propagation
directions in order to optimize transmission in both directions. This is shown in Fig. 4.4(a)
where the soliton carrier frequency is plotted as a function of distance for the east and west
directions. Unfortunately if both east and west fibers contain up-sliding filters, for any
given amplification stage the east and west filters will be different. For example, in the
worst case, at the beginning of the transmission line on either the east or west side, the east
and west filters will be offset by the maximum amount (e.g. if the sliding rate is +7 GHz/
Mm and the system length is 10 Mm, the filters will be offset by 7 GHz/Mm x
10 Mm
= 70 GHz. Since a typical FSR for the Fabry-Perot filters is 75 GHz, the filters are offset
from each other by almost the entire FSR). Thus, if an LM channel is to be looped back
onto the opposite fiber, the fact that both the eastbound and westbound filters are up-sliding is a problem as there will be a loss due to the filter mismatch.
There are at least two ways to solve the sliding filter problem. The first is requiring that
filters on the eastbound and westbound fibers slide in opposite directions, as shown in
Fig. 4.4(b). For example, the eastbound and westbound filters are up- and down-sliding,
respectively, allowing the Fabry-Perot peaks to coincide at any point along the transmission line, regardless of propagation direction. This may even facilitate fabrication [103]. In
this scenario, westbound data will see down-sliding filters (the worse case - recall discussion in Sec. 2.5.3). In addition, the LM channel will have to change its direction abruptly,
(a)
U
a)
L.
(c)
(b)
IL
k
o
t-
0
A
S"
o
a)
3"
a)
13"
(1)
a) LL
LL
LL
U-
Distance
SI/VI
Distance
Distance
Figure 4.4: Soliton carrier frequency as a function of distance (eastbound
and westbound) for (a) up-sliding filters for both eastbound and westbound
transmission; (b) up-sliding for eastbound and down-sliding for westbound
transmission; (c) "wiggling" filters.
which may be problematic as the soliton may not be able to keep up. A second idea is to
use a "wiggling" filter, instead of a (linearly) sliding filter [69][77]. In this case, as shown
in Fig. 4.4(c), the filters in the eastbound and westbound fibers move together. It is
unclear, however, if this will improve much upon the down-sliding filter case. Simulations
done in Ref. [77] show that zigzag filters (in which the filters move linearly in a sawtooth
fashion) perform better than both up- and down-sliding filters for pulse timing jitter, as
well as for soliton-soliton interactions. Although this work shows that zigzag filters are
promising, clearly they are undesirably complicated to manufacture.
4.2.3 Maintaining solitons after the loop-back
The next issue arises because solitons are to be employed in the LM channel. Solitons,
unlike linear NRZ format, have a minimum energy requirement. A soliton of a given pulse
width propagating in a fiber with a fixed GVD value, has a certain peak power, as given by
Eq. (2.9). This peak power requirement is flexible to some degree in the sense that if a
pulse is input with an area above a certain threshold (0.5 times the N=1 area), it will form
a soliton (likewise, there is an upper limit - 1.5 times the N=1 area - for the area). However, if this minimum power requirement is not met, the pulse will eventually die out (the
decay rate is more rapid in the presence of the sliding filters, as opposed to stationary filters). Thus, the highly lossy loop-back couplers which are used with the NRZ LM systems
will not be sufficient to maintain solitons in the looped-back LM channel. For this reason,
larger loop-back couplers will be necessary in order to send back more energy.
4.2.4 Gain saturation and crosstalk
Other possible problems are gain saturation and crosstalk. If we use ordinary (wavelength
insensitive) couplers to loop back the LM channel from east to west, for example, all the
eastbound data channels will also loop back with the LM channel. This additional power
will have a major effect on the gain for the westbound data. Gain saturation will cause the
gain to be pulled down severely. Furthermore, the additional looped-back signals will
interfere with the data transmission. In the case where the WDM data channels in the east
and west fibers are at the same wavelength, this crosstalk will be enough to degrade the
signal entirely.
4.2.5 Compatibility with AT&T's continuous loop-back protocol
As we were working on soliton LM for AT&T, the designed system was required to be
compatible with the continuous loop-back method of LM. That is, the LM occurs while
the cable is in service and employs loop-back couplers, similar to the previously described
NRZ LM system (Sec. 4.1).
4.2.6 Cost
A final issue is cost of the system. We would like to minimize the additional cost by
requiring that no new and expensive components such as channel dropping filters or circulators be necessary. Furthermore, we would like to minimize the amount of bandwidth
"sacrificed" for the LM channel.
4.3 Soliton LM scheme [99]-[101]
The LM system we developed at AT&T for soliton transmission with sliding-frequency
guiding filters is shown schematically in Fig. 4.5. The LM channel at wavelength XLM is a
low bit-rate soliton channel encoded with a pseudorandom bit pattern. The soliton pulses
have a FWHM identical to the data pulses. The LM channel is sent eastbound on a fiber
with group velocity dispersion DE(XLM) . A small fraction of the eastbound LM channel is
coupled back and returns westbound on a fiber with dispersion DW(XLM) . In order to
maintain soliton pulses in the looped-back (westbound) LM channel, we propose a loopback configuration which is slightly different than in conventional NRZ LM systems. The
couplers are placed such that the looped-back signal experiences additional amplification
on the return. This scheme uses oppositely sliding filters for the eastbound and westbound
directions (as in Fig. 4.4(b)) to ensure that the LM signal sees the same Fabry-Perot filter
profile regardless of propagation direction.
DE(XLM)
Figure 4.5: Our soliton LM scheme. The LM channel is a separate WDM
channel which propagates east on a fiber with dispersion DE, is looped back
onto the opposite-going fiber via fiber couplers, and returns westbound on a
fiber with Dw.
In Fig. 4.6 shows a schematic of our design. Notice that the eastbound and westbound
channels slide in opposite directions. In particular, the eastbound filters are up-sliding in
frequency (down-sliding in wavelength) while the westbound filters are down-sliding in
frequency. The wavelengths XE-I... XE-N represent the 1st through Nth eastbound channels
which travel east on a fiber with zero-dispersion wavelength XE,O. The wavelengthsw_ ... ,-N
represent the westbound channels which travel west on a fiber with
zero-dispersion wavelength Xw,
0. The zero-dispersion wavelengths of the east and west
fibers satisfy
E,O < Xw,o -
(4.2)
The LM channel is at wavelength XLM, propagating east on the fiber with zero-dispersion
wavelength XE,0 and returning west on the fiber with zero-dispersion wavelength Xw,o0
There are several advantages to using this setup. First, if XE,0, XW,0, and XLM are
selected such that
DE(XLM) > DW(XLM),
(4.3)
the LM channel can experience "effective gain" on the return. Since the soliton power
requirement is proportional to dispersion (see Eq. (2.9)), when the LM channel is looped
- W-N
_-c--
- •w-1
'"LM
XW-1
XE-N-
zero-dispersion wavelength =
XE-1-
---..
...
,,
0
0,E
EASTBOUND FIBER
Distance (Mm)
10
Figure 4.6: Soliton LM system: schematic plot of wavelength vs. distance.
East and west filters slide in opposite directions. The LM channel is placed
in the center; eastbound and westbound data channels are spectrally separated.
back onto the westbound fiber it will experience a reduction in the soliton threshold power
requirement. Henceforth, this effect will be referred to as an "effective gain" of
effective gain =
DE(,LM)
D(LM
) .
DW(XLM)
(4.4)
Second, the data channels are automatically spectrally separated if we select the wavelengths XE-i and Xw-i such that
DE(E-i)
= Dw(Xw-i)
(4.5)
i.e. the dispersions are selected such that the ith eastbound channel has approximately the
same dispersion as the ith westbound channel. Note that the dispersions of the ith eastbound and the ith westbound channels may not be exactly the same due to the constraint
that the channels be separated by integer multiples of the FSR. Since the data is then spectrally separated, any possibility of crosstalk between the westbound data and looped-back
data is eliminated. It also means that all the data channels have D < 1 ps/nm/km ensuring
optimum transmission. Finally, by using different average dispersions for eastbound and
westbound fibers, there will be better utilization of the manufactured fibers. This configuration, along with the modified positioning of the loop-back couplers, ensures that the
small fraction of the LM channel which is looped-back maintains soliton pulses.
Eastbound
Westbound
C:
(I,
0
C,
CD
Q.
Cn
0
0Z
IE
AE-1
I
I
f
XE-N XLM
II
XW-1
XW-N
Wavelength
Figure 4.7: Relation between dispersion and the data and LM channels.
Fig. 4.7 shows schematically the dispersion relation for the east and west fibers and the
positioning of the channels. Notice that both the east and west fibers have the same dispersion slope, D'. However, the dispersion zero wavelengths for the two fibers are different.
This is not difficult to accomplish in practice, as each span is typically made up of several
pieces of fiber with different dispersions.
For best performance, the eastbound and westbound filters (which slide in opposite
the frequency lag which occurs between
directions) must be offset from each other by A",
the soliton and sliding filter carrier frequencies [66]. Recall the lag frequency is given by
the following expression:
3
AU =
21j
(4.6)
f,'
where ri is the normalized filter parameter and cof' is the normalized sliding rate given by
Eq. (2.57) and Eq. (2.59), respectively. This slight offset in the east- and west-going filters
give rise to an additional gain (of about 1%) to the looped-back pulses.
One may ask why the LM channel is selected experience the up-sliding filter (in frequency) on the way out rather than on the way back. The sliding direction does make a
slight difference in the effective gain experienced by the LM channel at the loop back. In
the proposed configuration, the effective gain actually increases as a function of distance.
In the case in which the eastbound filters are down-sliding and the westbound filters are
up-sliding, the effective gain decreases as a function of distance. This is shown in Fig. 4.8.
These changes in gain are simply due to the slight change in wavelength of the LM channel (and of course data) due to the sliding.
.
2.10
"
2.05
c
ao
0
2.00
1.95
I-
p
I
0
2
-
4
-
6
8
10
distance (Mm)
Figure 4.8: Effective gain for the LM channel as a function of distance.
Solid line corresponds to up-sliding east / down-sliding west filters. Dashed
line corresponds to down-sliding east / up-sliding west filters. In both cases,
the LM channel propagates eastbound and loops back westbound.
4.4 Computer simulations
Numerical simulations of this LM scheme were performed. A 10 Mm (20 Mm round-trip)
soliton transmission system is considered. The system contains filters located at each
amplification stage, spaced by LF = 35 km. This gives a total of 286 amplification
stages. The filters slide at a rate of f' = ±7 GHz/Mm and have Free Spectral Range
(FSR) = 100 GHz, corresponding to d = 1.5 mm. The Fabry-Perot reflectivity is 9%.
The steady state soliton pulses in such a system have FWHM - 20 ps. For the simulations, the zero-dispersion wavelengths for the eastbound and westbound fibers are
= 1539 nm and Xw,o = 1545 nm. The LM channel is placed at XLM = 1551 nm.
gives
a (typical) dispersion slope of D' = 0.07 ps/nm2/km,
Assuming
XE,O
DE(XLM) = 0.84 ps/nm/km and DW,(LM) = 0.40 ps/nm/km. This gives an "effective
gain" for the looped-back pulses of approximately 0.84/0.40 = 2.1 . A value of AQ, the
frequency offset between the east and west sliding filters, of 5 GHz is used. This data is
summarized in Table 4.1.
The placement of the channels is shown in Fig. 4.9, which is similar to Fig. 4.6, where
wavelength versus distance is plotted. There are six WDM data channels spaced by 100
GHz (the FSR of the Fabry-Perot filters), approximately 0.81 nm, in both the east and west
directions. Of course if a smaller FSR filters are employed, it will be possible to fit in more
data channels. A summary of the channel wavelengths and dispersions is shown in Table
4.2 and Table 4.3.
4.4.1 Faulty pump module
The scenario that is simulated is shown in Fig. 4.10. One pump module in second-to-last
(285th) eastbound amplification stage has failed and has a gain of GLO. Since the amplifiers are redundantly pumped, with two pumps for each pair of eastbound and westbound
amplification stages, the 2nd amplifier on the westbound fiber has also been affected [89].
The estimated loss of gain is 4 dB, since the amplifiers are run in compression mode. To
simplify the simulation, we assume that the entire 4 dB of lost gain is compensated for in
the following amplifier which has a gain of GHI as indicated in Fig. 4.10. In reality, it takes
several amplifiers to compensate for the lost gain.
In the computer simulation, only the LM channel is input with the bit pattern 0101110,
at a bit rate of 1.25 GBit/s (in practice, one would use a much lower rate, but this is diffi-
100
- 1555.2
'•LM
L
=
I,
1551
- 1551.2
0.
.
1550.2-
M.
, -
-
XO,E
1546.2-
Distance (Mm)
Figure 4.9: Plot of wavelength vs. distance which shows the relative positioning of the data and LM channels.
1st
284th
285th
286th
286th
3rd
2nd
1st
Figure 4.10: Schematic for simulation of 285th pump module malfunction
(loss of 4dB).
101
,,
8
I
II
II
E
E
,-0.4
4
I
I
Ir
Is
II
II
I
I
l
Is
Ir
l
Is
Is
I
Ir
I
I
p1
00
(b)
I'
0
-2000
0
Time (ps)
2000
II
-2000
11111
0
Time (ps)
2000
Figure 4.11: (a) and (b) show simulation results for loop-back "1" and "2."
Shown in (a) is the degraded signal returning from loop-back "1." The pattern has disappeared. Shown in (b) are the input (dashed) and output (solid)
pulse power vs. time.
cult to simulate). A small fraction of the eastbound signal is looped back and the outputs
from loop-backs "1" and "2" as marked in Fig. 4.10 are observed after filtering using a
100 GHz square-shaped filter. When the 285th pump module is faulty, the output from
loop-back "1" is degraded due to the lost gain. After two degraded amplifiers, the data is
unable to meet the soliton area threshold requirement. Simulation results of loop-backs
"1" and "2" are shown in Fig. 4.11. The loop-back from "1," shown in Fig. 4.11(a), is
indeed degraded; the noise may grow into a pulse pattern, but the original bit pattern was
never recovered. Of course, the longer the input pseudorandom word, the better the probability that it can never be reproduced from random noise growth. In Fig. 4.11 (b), the input
(dashed) and loop-back "2" (solid) bit patterns are shown. Note that the output pulse pattern from loop-back "2" has been time shifted for aesthetic purposes. The bit pattern is
maintained over this long distance, a total of - 20 Mm (less two amplification stages). In
the case in which the pump module is fully functional, the LM signals returning from "1"
and "2" would both be good. The sort of signal that is received is shown in Fig. 4.12. Thus,
using the appropriate signal processing schemes, one will be able to determine the exact
location of the faulty pump module [98].
102
c)
-
E
LO
co
(0
00
II
00
CU
-
..
)
o
...
-)
co
*
o
cso
0.0
00
o
-
_ c'.'
•._
CO)
cV
00
JeAIEoJ JU!
IlUbIS
103
E
.
70
0 350
2
01
0
5 1.0
10
0.5
0n
0
5
10
1 5
Distance(M
20
20
Figure 4.13: (a)-(c) show pulse frequency shift, peak power, pulse width all
vs. distance for loop-back "2."
In Fig. 4.13(a)-(c), the frequency shift, normalized pulse peak power, and normalized
pulse width are shown, all as functions of distance for loop-back "2." Distances less than
10 Mm indicate eastbound propagation on the fiber with DE(,LM) = 0.84 ps/nm/km
while those greater than 10 Mm indicate westbound propagation on the fiber with
D,((LM) = 0.40 ps/nm/km. As shown in Fig. 4.13(a), the frequency increases during
the eastbound
(z < 10 Mm)
transmission and decreases
during the westbound
(z > 10 Mm) transmission. In Fig. 4.13(b), it is shown that initial (eastbound) power
reaches a steady state around 2 (this value is dependent on the excess gain used in the simulation). Then, the power drops when the signal experiences the large loop-back loss. The
signal then takes a while to recover to a steady state westbound peak power of approximately half of the eastbound peak power. This is consistent with the "effective gain" of
2.1: the steady state power during the first half of the transmission (eastbound) is approximately 2, while during the second half it is approximately 1. The pulse width, shown in
Fig. 4.13(c), remains approximately the same over the entire distance.
104
Parameter
Symbol
Value
System length
Ltotal
10,010 km= 286 LA
Amplifier spacing
LA
35 km
Total number of spans
-
286
7 GHz/Mm
f
Filter slide rate
100 GHz
Filter FSR
Filter reflectivity
R
9%
Pulse FWHM
UFWHM
20 ps
Zero-dispersion wavelength for westbound fiber
XE,O
1539 nm
Zero-dispersion wavelength for eastbound fiber
Xw,o
1545 nm
LM carrier wavelength
XLM
1551 nm
Eastbound dispersion for
LM channel
DE(XLM)
0.84 ps/nm/km
Westbound dispersion for
LM channel
DW(QýLM)
0.42 ps/nm/km
Table 4.1 Summary of simulation parameters for simulations in Sec. 4.4.
E-i
X(z=O Mm)
X(z=1O Mm)
D(z=O Mm)
D(z=1O Mm)
LM
1551.0
1550.4
0.8400
0.8007
E-6
1550.2
1549.6
0.7839
0.7446
E-5
1549.4
1548.8
0.7277
0.6884
E-4
1548.6
1548.0
0.6716
0.6323
E-3
1547.8
1547.2
0.6155
0.5762
E-2
1547.0
1546.4
0.5593
0.5201
E-1
1546.2
1545.6
0.5032
0.4639
Table 4.2 Eastbound channel data.a
a. Note wavelength is in nm and D is in ps/nm/km.
105
W-i
X(z=1O Mm)
X(z=O Mm)
D(z=1O Mm)
D(z=O Mm)
W-6
1555.2
1555.8
0.7175
0.7568
W-5
1554.4
1555.0
0.6614
0.7007
W-4
1553.6
1554.2
0.6052
0.6445
W-3
1552.8
1553.4
0.5491
0.5884
W-2
1552.0
1552.6
0.4930
0.5323
W-1
1551.2
1551.8
0.4368
0.4761
LM
1550.4
1551.0
0.3807
0.4200
Table 4.3 Westbound channel data. a
a. Note wavelength is in nm and D is in ps/nm/km. Note that z is the distance as
measured from the east side. Thus, the westbound channel begins at z=10 Mm
and propagates backwards to z=0 Mm.
4.5 Discussion
This section addresses a few issues which arise when implementing a real soliton LM system as proposed in this chapter.
4.5.1 Gain-shaping filter design
edge filter
shaping filter
- - - - -
-.-
1
LM
east
IIIII
I
west
III
Wavelength
Figure 4.14: Simple gain-shaping filters which can be used to eliminate
gain saturation problems on the returning fiber.
In a practical system, a sliding "edge" filter or a simple gain-shaping filter, as shown in
Fig. 4.14, may be employed on the westbound fiber to filter out all the eastbound data
106
channels which are looped back with the LM channel. The looped-back data, though it
does not interfere with the westbound data, may cause the gain on the westbound fiber to
saturate. Thus, ideally such a filter should be built into the gain-shaping filters which will
already be used in the system.
4.5.2 Bidirectional LM
In the configuration we present here, LM is performed only from the eastern terminal. The
specifications for an LM system are adequately met by such a design, as the LM system is
only required to find the first fault in the system. If both the eastern and western terminals
wish to have LM capabilities, one could take advantage of the fact that an undersea transmission system actually employs two complete fiber pairs. In this case, each fiber pair may
be designed with full monitoring capabilities. Since only one fiber pair is active at a time,
the information regarding failed pump modules will only be relevant from the LM system
for the active fiber pair. However, fiber breaks could be detected from both ends. Alternatively, LM may be performed from either side if another channel at XLM-2 is employed and
looped back from west to east using larger coupler strengths.
4.6 Another possible LM scheme 2
The LM scheme proposed here has a few obvious concerns. First, it uses two different dispersion fibers for east and west propagation. While this is not a problem in theory, it makes
system implementation difficult. Furthermore, the proposed system only easily facilitates
uni-directional LM. Lastly, the placement of the east and west channels in spectrally separate bands may not be an efficient use of the Erbium gain bandwidth.3 For these reasons,
we have come up with another possible scheme which employs Channel Dropping Filters
(CDF's).
The new LM scheme is shown in Fig. 4.16. In the scheme, the east and west data may
reside in the same spectral band. The eastbound data has a LM channel at XLM-E and the
westbound data has a LM channel at XLM-W, as shown. CDF's on the eastbound fiber drop
2. This scheme was conceived by J. N. Damask and E I. Khatri. We acknowledge L. E Mollenauer
for an interesting discussion.
3. Although, gain-shaping filters which flatten the Erbium gain shape are generally employed.
These filters typically flatten only half of the Erbium gain bandwidth.
107
X
4-P
0
MEMO
C/)
mi1i
U)
" ..
iumn1
iN In
•
m1
or)
*
I
E
E
o
~
o
c
;3
a
Ic
bo
Cl
C-ý
0)
_0
|
U)
m
I
I
c0
~(D
.U)
I
a
ed
C
vl
E:
ba
re
O
cr
C
Q)
E
ed
Pc
V)
r
d
I
-
-J
-- 1'
C
0
~0
-IU,
I-
()
C €'-
c
.0-Ul)
U1)
ým
108
-J
Q)
L
E
LL
r,
m
AL
AL
4-0-
r-
i
0
J
4-c)
a)
a,
a)
0©
E
,C.
o
E
©
2
1/1
,.0
©l.
©
°,.
°,.
.90
T""
C-.;
a
w
4-a
CL,
al)
-i
t-
...
C7
___J
109
a fraction of the eastbound LM channel and couplers are used to put the light onto the
opposite fibers. Similarly, appropriate CDF's are employed on the westbound fiber.
4.7 Summary
In summary, a novel line-monitoring method compatible with soliton systems using sliding-frequency guiding filters has been proposed and numerically simulated. The system
uses WDM soliton pulses for the LM channel and employs eastbound and westbound
fibers with different average dispersions. The looped-back LM channel will experience
"excess gain" if the westbound fiber has a lower average dispersion than the eastbound
fiber (for the LM channel). Simulations have been performed for the case where one pump
module close to the end of the fiber is defective. In this case, the LM signal which returns
directly from the defective pump is degraded, whereas the LM signal which returns from
the next amplifier maintains the input bit pattern. Using this data along with an appropriate
signal processing scheme, one can determine the location of the fault. Similarly, a broken
fiber will produce another unique signature which can be processed to determine the location of the break.
110
Chapter 5
Summary and
future work
This chapter summarizes this thesis and discusses some areas of future work.
5.1 On soliton propagation with continuum
In Chapter 3, soliton-continuum interaction was considered. We found, by simulation, that
in situations where there a random pattern of soliton pulses exists, continuum shed from
one soliton may affect the timing of neighboring pulses. In the chapter, we derived the
analytic result that the timing shift of a soliton due to an interaction with a low-intensity
wave packet is proportional to the energy of the low-intensity wave packet. The resulting
timing is not dependent on the shape of the perturbation. We also found a way to find the
z-dependence of the soliton timing shift given the shape of the perturbing wave packet.
These results are a first step towards finding the contribution of soliton-continuum
interaction to the timing jitter of soliton pulses in long-distance transmission systems. The
next step is to employ real expressions for continuum shed from soliton pulses to find timing deviation of the soliton pulses. This may be done by using the method outlined in Ref.
[116] to find an expression for the continuum. Then, using the results given in Ref. [115]
(Chapter 3), the timing may be found.
out
in -
mode-locked fiber soliton lasers
optical loop memories
Further applications for the study of soliton-continuum interFigure 5.1:
action. Shown above is a very simple schematic for a fiber loop memory or a
mode-locked fiber soliton laser. Below are typical pulse patterns for both
cases.
Furthermore, the same calculation of jitter due to soliton-continuum interaction is useful in optical memories and fiber lasers. These devices are very similar to long-distance
soliton transmission systems. A sample optical memory (or fiber soliton laser) is shown in
Fig. 5.1. Two of the elements in an optical memory or laser are a gain medium (EDFA)
and an optical isolator (there are other elements in these systems, of course). Both devices
will have output couplers, and a memory will also have an input coupler. In a memory
device, the objective is to store a random bit pattern, as shown in the figure. In this case, as
there are asymmetrically placed pulses, continuum will interact with the pulses leading to
timing deviations. Since a memory must work for a "long" time of a minute or two, this is
equivalent to a few times the trans-oceanic distance. Thus, the problem of soliton-continuum interaction should be studied in this context. In the fiber laser, the problem is also relevant though less obvious. In this case, the desired output is not a bit pattern, but a train of
evenly spaced pulses as shown in Fig. 5.1. Often these lasers do not have timing elements
and yet contain multiple pulses per round trip. In this case, as the laser must work stably
112
for hours at a time, soliton-continuum interactions become important during the transient
and when there are perturbations to the system.
5.2 On soliton supervisory control systems
A viable soliton supervisory control, or line-monitoring (LM) system, is a significant step
in the development work required to put solitons into an undersea system. In this thesis, a
soliton LM system was proposed in Chapter 4. This system contains uses a separate wavelength division multiplexed soliton channel to perform LM primarily from one direction.
The LM channel is sent down one fiber and then looped-back onto the opposite going
fiber. In order to maintain solitons in the returning LM signal, a trick is played with the
dispersion zero wavelengths of the two fibers.
This system, although it satisfies the requirements of a supervisory control system, has
several drawbacks, as noted in Sec. 4.6. In that section, a novel way to perform soliton LM
(which is shown in Fig. 4.16) using channel dropping filters was proposed. This system
employs channel dropping filters which "drop" a fraction of the LM channel onto the
opposite-going fiber. This system works with two separate wavelengths for the east and
west LM channels.
Another system which must be considered, however, is a supervisory control system
which is compatible with stationary filters (rather than sliding filters). In this case, the
"damping length" (distance in which modulations on a train of pulses damps out) is long
as compared to a system with sliding-frequency guiding filters. This may lift the constraint
that the LM channel use the same pulse width as the data pulses. In addition, it may be
possible to use the same LM method that is used in NRZ systems.
113
Appendix A Normalizing the
evolution equation
This appendix summarizes the basic soliton normalizations. Note that the NSE is normalized to bright solitons in media with anomalous group velocity dispersion (GVD) (and
positive Kerr effect), and therefore, k 2 = -Ik 2 •.The unnormalized Master Equation is as
follows:
- U i(+g-1)+
g +
2
1
au+
1
2
SLF
-CRK
u
2
3• u
i--2
+ k3
t2
2
6t3
f. Ik•
(A.1)
+iIlulz2
Here u is the complex field; z is distance; t is the (possibly shifting) time coordinate; W is
a phase shift per length; g is the (saturated) linear gain per length; 1 is the linear loss per
length, • 2G is the spectral half-width at half maximum intensity of the (homogeneouslybroadened) gain; K-F is the spectral half-width at half maximum intensity of the net passive
(static) filtering; LF is a characteristic length for QF; km, m = 1, 2, 3... are the mth-order
1. The material in this appendix was written by myself and J. D. Moores in 1988.
114
coefficients of group-velocity dispersion, 63 is the Kerr coefficient (self-phase modulation,
sometimes given as K), and cR is the effective Raman relaxation time.
To normalize, first let
twhere the normalized
time
(A.2)
z _ ZnZ c
and
tnt
and space variables
are
t, and zn respectively,
r = 0. 5 6 7 2 9 6 3 3 tFWHM, tFWHM is the pulse width at half-maximum intensity, and zc is a
characteristic length scale which shall be determined below, where we normalize the dispersion coefficient. The choice of time scale is such that normalized sech(tn/N) corresponds to a pulse whose FWHM is N'TFWHM in real units. Next, use the chain rule to get
the following derivatives:
au
Z
au ddzn
Jzndz
1
ZcaZn
au
au dtn
1au
at
atndt
'rt
(A.3)
n
2
au
at 2
2
_(l
dtn
att,{tncdt
a u
,2
t2
Making these replacements, the Master Equation becomes:
1au i ({i(±
+g- l) + 'T2z2g G
1ZZ z
1
Lr2~
a2
2t2
a2 + k3 a 3
U++2kl2at2
tF
6, a3t3
(A.4)
-
iCRKU
+ iK u[2
t a tn
Next, divide out
1/
Ik 2
2
so that the normalized dispersion is 1/2. This gives:
115
2C21au
22
Ik2 ZcaZn
|k2I
Jk2j G
- .cRTKa
k21 jul
tn
au//Zn
Fjk2 F
n
.1
2
2at2
3a
k3
+1(A)
(A.5)
2
+ K
Ik21 an
Now, set the coefficient for
+
L
+
IU1
1k21
to 1, and get
2
Zc
jk2l
(A.6)
Zc = -Zo
(A.7)
Note that
where z0o is the soliton period. The Kerr effect must also be normalized:
Un
U
(A.8)
z-zC
Finally, this gives:
aun
-
+2
i(Q + g -1)2
gY +
+
1
)a2u
un +
.1 2
2at2
k3
a3}
+61kal•at3
Un
(A.9)
ilUn 2
-.CR+
'lk2l
atn
Thus, normalized parameters can be defined, so that the normalized equation is of the
same form as the unnormalized equation, Eq. (A. 1). These are summarized in Table A. 1.
Normalized parameter
Value
lVn
V zc
gn
g Zc
In
I zc
-G,n
"GT
Table A.1: Soliton normalizations.
116
Normalized parameter
Value
LFn
LF/Z
'Fn
F
k2,n
I
k3,n
k2 zc /
CR,n
CR,n /
cn
1
Table A.1: Soliton normalizations.
117
3
Appendix B Numerical simulation
of the NSE
B.1 The split-step Fourier method
Numerical simulation is an invaluable tool in designing soliton communication systems.
The standard method for simulating propagation in an optical fiber via the NSE is the
split-step Fourier method [2] (see also Sec. 2.4 in Ref. [7]). The NSE may be written as:
au
az -
(D+ N)u
(B.1)
where u is now the discretized temporal profile (see Table B.1 for some typical numbers)
and
2
-u
1-
1,
3
u
D = (g -l1)-i-Ik"I t + 6 k"' at3
a
2
(B.2)
and
S=
iK
2 + Rlu
118
(B.3)
In the split-step Fourier method, these two operators are done separately. In particular, one
performs a half-step which is nonlinear, a linear step, and then another half-step of nonlinearity:
u z + 2, t = u(z, t)exp iN[u(z, t)]
u(z+, t) = FT_
u(z + h, t) = u+
(B.4)
+0)
+2,
exp ib
Zii+ 2, o0j
, t) exp i• uz + 2, t
This is illustrated pictorially in Fig. B. 1.
h
u(t,z)
-"-I
*a*
0=V
t
Nonlinear half-steps
Dispersive
step
Figure B.1: Split-step Fourier method schematic (similar to that found in
Ref. [7]).
Table B. 1 below gives a guide to the type of numbers which should be used in a soliton
simulation.
Parameter
Typical values
# of temporal grid points
512 - 2048
# of spatial grid points per
soliton period
100 Psol /
temporal window size
P
N=1
> 20 FWHM's
Table B.1: Typical parameters used for simulation of an NSE soliton.
119
B.2 Optimizing Cray code
The facility used for much of the numerical simulations in this thesis is the San Diego
Supercomputer Center (SDSC) 1. The particular machine, called c90, that is used is a
CRAY C98/128 with eight CPU's and a 4.2 ns clock. The computer can provide a theoretical peak speed of 8 Gflops. In order to utilize this power, a few basics are important to
know.
1. Vectorization. The cray has vector hardware which allows more than one operation
to be performed at one time. For example, consider the following FORTRAN loop:
200
do 200 j=1,1024
nlph(j)=kappa*cdabs(u_in(j) ) * *2
u_out(j)=u_in(j)*(dcos(nl ph(j)+i*dsin(nl_ph(j)))
continue
On a scalar machine, this loop would be performed by going through each individual j value separately. However, on a vector machine, the loop is performed differently. The c90 has eight vector registers which may hold up to 128 operands. Thus,
on this machine, the loop would be processed 128 elements at a time. Note certain
functions do not vectorize (often complex functions). It generally pays off for the
user to test out functions which are used often to make sure they vectorize.
2. Optimized cray routines. Cray research has provided optimized functions which do
fast Fourier transforms, sum vectors, etc. For example, the fast fourier transform:
C
C
C
C
C
C
C
complex*16 u(n) ,ft(n)
real*8 aux1(8*n+100),aux2(8*n),inv
integer*4 n
inv=l.d0/n
INITIALIZE FFT (DO ONLY ONCE FOR EACH VALUE OF n AND
EACH auxl ARRAY.)
call ccfft(0,n, 0.d0,0.d0, 0.d0,auxl, 0.d0,0)
PERFORM FFT:
call ccfft(l,n,l.d0,u,ft,auxl,aux2,0)
PERFORM OPERATIONS IN FT DOMAIN
PERFORM INVERSE FFT:
call ccfft(-l,n,inv,ft,u,auxl,aux2,0)
1. See the SDSC Cray User Guide, published by General Atomics, 1994 or later.
120
Furthermore, there are other functions written by Cray Research which are useful.
For example, a function for calculating the energy of a pulse is ssum:
300
real*8 uint(n) ,energy,dt
complex*16 u(n)
integer* 4 j,n
do 300 j=l,n
u_int(j)=cdabs(u(j))**2
continue
energy=ssum (n,u_int(1) ,1) *dt
There are other functions as well, including some written by other companies
(such as Boeing's BCS library). The interested user is encouraged to browse
through the help files on-line.
References
R.1
Background & submarine systems
[1]
W. White, "Linking people to information," plenary talk, Optical FiberCommunication Conference, San Jose, CA, February 1996.
[2]
R. H. Hardin and F. D. Tappert, SIAM Rev. Chronicle 15, p.423, 1973.
[3]
N. Nakazawa, Y. Kimura, K. Suzuki, and H. Kubota, "Wavelength multiple soliton
amplification and transmission with an Er3+-doped optical fiber," J. Appl. Phys., vol.
866, no.7, pp. 2803-2812, 1989.
[4]
E. Desurvire, "Erbium-doped fiber amplifiers for new generations of optical communication systems," Optics & PhotonicsNews, vol. 2, no. 1, pp. 6-11,1991.
[5]
N. S. Bergano, "Undersea lightwave transmission systems using Er-doped fiber
amplifiers," Optics & PhotonicsNews, vol. 4, no. 1, pp. 8-4, 1993.
[6]
J. Hecht, "Push is on for multiwavelength optical networks," Laser Focus World,
vol. 31, no. 10, pp. 59-61, 1995.
[7]
G.P.Agrawal,FiberOptic Communication Systems. John Wiley & Sons, 1992.
[8]
"TAT-12 fiber cable linking U.S. and Europe starts service," AT&T News Release
for Monday, October 16, 1995 (see http://www.att.com/press).
[9]
F. W. Kerfoot and P. K. Runge, "Future directions for undersea communications,"
AT&T Technical Journal,vol. 74, no. 1, pp. 93-102, 1995.
[10]
J. Sipress, "Undersea communications technology," AT&T Technical Journal, vol.
74, no. 1,pp.4-7, 1995.
[11]
J. C. Zsakany et al., "The application of undersea cable systems in global networking," AT&T Tech. Journal,vol. 74, no. 1, pp. 8-15, 1995
[12] "Industry Update," p.3,Lightwave, September 1995.
[13]
H. Taga, N. Edagawa, S.Yamamoto, and S.Akiba, "Recent progress inamplified
undersea systems," J. Lightwave. Tech., vol. 13, no. 5, pp. 829-840, 1995.
[14]
T. Welsh et al., "The FLAG Cable System," IEEE Communications Magazine, vol.
34, no.2,pp.30-35, 1996.
R.2
Transmission using solitons (historical/general)
[15] A. Hasegawa, OpticalSolitons in Fibers. Springer-Verlag, 1990.
[16] J. R. Taylor, ed., Optical Solitons - Theory and Experiment. University Press, 1992.
[17]
H. A. Haus, "Optical fiber solitons, their properties and uses," Proceedings of the
IEEE, vol. 81, no.7,pp. 970-983, 1993.
[18] H. A.Haus, "Molding light into solitons," IEEE Spectrum, pp.48-53, March 1993.
122
[19] M. Nakazawa, "Telecommunications rides a new wave," Photonics Spectra, pp. 97102, Feb. 1996.
[20]
R.3
H. A. Haus and W. S. Wong, "Solitons in optical communications," Review of Modem Physics,April 1996.
Alternatives to on-off keying for soliton communications
[21]
A. Hasegawa and T. Nyu, "Eigenvalue communication," J. Lightwave Tech., vol. 11,
no. 3, pp. 395-399, 1993.
[22]
N. N. Akhmediev, G. Town, and S. Wabnitz, "Soliton coding based on shape invariant interacting packets: the three-soliton case," Opt. Commun., vol. 104, no. 4,5,6,
pp. 385-390, 1994.
R.4
[23]
Transmission using the non-return to zero scheme
A. R. Chraplyvy, "Limitations on lightwave communications imposed by opticalfiber nonlinearities," J. Lightwave Tech., vol. 8, no. 10, pp. 1548-1557, 1990.
[24] N. S. Bergano and C. R. Davidson, "Circulating loop transmission experiments for
the study of long-haul transmission systems using Erbium-doped fiber amplifiers," J.
Lightwave Tech., vol. 13, no. 5, pp. 879-888, 1995.
[25] N. S. Bergano, C. R. Davidson, D. L. Wilson, F. W. Kerfoot, M. D. Tremblay, M. D.
Levonas, J. P. Morreale, J. D. Evankow, P. C. Corbett, M. A. Mills, G. A. Ferguson,
A. M. Vengsarkar, J. R. Pedrazzani, J. A. Nagel, J. L. Zyskind, J. W. Sulhoff, "100
Gb/s error-free transmission over 9100 km using twenty 5 Gb/s WDM data channels," paper PD23, Optical Fiber Communications Conference, San Jose, CA, February 1996.
R.5
[26]
Long-distance soliton experiments
L. F. Mollenauer and K. Smith, "Demonstration of soliton transmission over more
than 4,000 km with loss periodically compensated by Raman gain," Opt. Lett., vol.
13, pp. 675-77, Aug. 1988.
[27] L. F. Mollenauer, M. J. Neubelt, S. G. Evangelides, J. P. Gordon, J. R. Simpson, and
L. G. Cohen, "Experimental study of soliton transmission over more than 10,000 km
in dispersion-shifted fiber," Opt. Lett., vol. 15, no. 21, pp. 1203-1205, 1990.
[28] M. Nakazawa, E. Yamada, H. Kubota, and K. Suzuki, "10 Gbit/s soliton data transmission over one million kilometers," Electron. Lett., vol. 27, no. 14, pp. 1270-1272,
1991.
[29]
N. Edagawa, M. Suzuki, H. Taga, H. Tanaka, Y.Takahashi, S. Yamamoto, and S.
Akiba, "Robustness of 20 Gbit/s, 100 km spacing, 1000 km soliton transmission system," Electron. Lett., vol. 31, no. 8, pp. 663-665, 1995.
[30]
M. Nakazawa, Y.Kimura, K. Suzuki, H. Kubota, T. Komukai, E. Yamada, T. Sugawa, E. Yoshida, T. Yamamoto, T. Imai, A. Sahara, H. Nakazawa, O.Yamauchi, and
M. Umezawa, "Field demonstration of soliton transmission at 10 Gbit/s over 2000
123
km in Tokyo metropolitan optical loop network," Electron. Lett., vol. 31, no. 12, pp.
992-993, 1995.
[31]
F. Favre and D. LeGuen, "20 GBit/s soliton transmission over 19 Mm using slidingfrequency guiding filters," Electron. Lett., vol. 31, no. 12, pp. 991-2, 1995.
[32]
J. P. King, I. Hardcastle, H. J. Harvey, P. D. Greene, B. J. Shaw, M. G. Jones, D. J.
Forbes, and M. C. Wright, "Polarisation-independent 20 Gbit/s soliton data transmission using amplitude and phase modulation soliton transmission control," Electron. Lett., vol. 31, no. 13, pp. 1090-1091, 1995.
[33]
G. Aubin, E. Jeanney, T. Montalant, J. Moulu, F. Birio, J. -B. Tomine, and F.
Devaux, "20 GBit/s soliton transmission over transoceanic distances with a 105km
amplifier span," Electron. Lett., vol. 31, no. 13, pp. 1079-1080, 1995.
[34]
L. F. Mollenauer, P. V. Mamyshev, M. J. Neubelt, "Demonstration of soliton WDM
transmission at up to 8 x 10 Gbit/s error-free over transoceanic distances," paper
PD22, Optical Fiber Communications Conference, San Jose, CA, February 1996.
[35]
L. E Mollenauer, P. V. Mamyshev, M. J. Neubelt, "Demonstration of soliton WDM
transmission at 6 and 7 X 10 Gbit/s, error-free over transoceanic distances," Electron. Lett., vol. 32, no. 5, pp. 471-3, 1996.
R.6
Wavelength-division multiplexing
[36]
P. Andrekson, N. A. Olsson, J. R. Simpson, T. Tanbun-Ek, R. A. Logan, and K. W.
Wecht, "Observation of collision induced temporary soliton carrier frequency
shifts in ultra-long fiber transmission systems," J. Lightwave Tech., vol. 9, no. 9,
pp. 1132-1135, 1991.
[37]
L.F.Mollenauer, S.G.Evangelides, and J.P.Gordon, "Wavelength division multiplexing with solitons in ultra-long distance transmission using lumped amplifiers," J.
Lightwave Tech., vol. 9, no. 3, pp. 362-367, 1991.
[38] Y.Kodama and A. Hasegawa, "Effects of initial overlap on the propagation of optical solitons at different wavelengths," Opt. Lett., vol. 16, no. 4, pp. 208-210, 1991.
[39]
A. D. Ellis, D. A. Cleland, J. D. Cox, and W. A. Stallard, "Two-channel soliton
transmission over 678 km," OFC '92 paper WC3.
[40]
J. D. Moores, "Ultra-long distance wavelength-division-multiplexed soliton transmission using inhomogeneously broadened fiber amplifiers," J. Lightwave Tech.,
vol. 10, no. 4, pp. 482-487, 1992.
[41] A. Mecozzi and H. A. Haus, "Effect of filters on soliton interactions in wavelengthdivision-multiplexing systems," J.Opt.Lett., vol. 17, no. 14, pp. 988-990, 1992.
[42]
P. C. Subramaniam, "Wavelength division multiplexing of phase modulated solitons," Opt. Commun., vol. 93, no. 5,6, pp. 294-299, 1992.
[43]
L. F. Mollenauer, E. Lichtman, M. J. Neubelt, G. T. Harvey, "Demonstration, using
sliding-frequency guiding filters, of error-free soliton transmission over more than
20 Mm at 10 Gbit/s, single channel, and over more than 13 Mm at 20 Gbit/s in a twochannel WDM," Electron. Lett., vol. 29, no. 10, pp. 910-911, 1993.
[44]
A. F. Brenner, J. R. Sauer, and M. J. Ablowitz, "Interaction effects on wavelengthmultiplexed soliton data packets," J. Opt. Soc. Am. B10, no. 12, pp. 2331-2340,
1993.
[45] R. Ohhira, M. Matsumoto, and A. Hasegawa, "Effect of polarization orthogonalities
in wavelength division multiplexing soliton transmission system," Opt. Commun.,
vol. 111, pp. 39-42, 1994.
[46]
M. Midrio, P. Franco, F Matera, M. Romagnoli, M. Settembre, "Wavelength division multiplexed soliton transmission with filtering," Opt. Commun., vol. 112, pp.
283-288, 1994.
[47]
Y. Kodama and S. Wabnitz, "Effect of filtering on the dynamics of resonant multisoliton collisions in a periodically amplified wavelength division multiplexed system," Opt. Commun., vol. 113, pp. 395-400, 1995.
[48]
X.-Y. Tang and M.-K. Chin, "Optimal channel spacing of wavelength division multiplexing optical soliton communication systems," Opt. Commun., vol. 119, pp. 4145, 1995.
[49]
E. A. Golovchenko, A. N. Pilipetskii, C.R. Menyuk, "Minimum channel spacing in
filtered soliton wavelength-division multiplexed transmission," Opt. Lett., vol. 21,
no. 3, pp. 195-197, 1996.
R.7
Soliton transmission control and limitations
[50] J. P. Gordon, "Theory of the soliton self-frequency shift," Opt. Lett., vol. 11, no. 10,
pp. 662-664, 1986.
[51]
J. P. Gordon and H. A. Haus, "Random walk of coherently amplified solitons in
optical fiber transmission," Opt. Lett., vol. 11, no. 10, pp. 665-667, 1986.
[52]
K. Tajima, "Compensation of soliton broadening in nonlinear optical fibers with
loss," Opt. Lett., vol. 12, no. 1, pp. 54-6, 1987.
[53]
J. P. Gordon, "Interaction forces among solitons in optical fibers," Opt. Lett., vol. 8,
no. 11, pp. 596-598, 1993.
[54]
L. F. Mollenauer, J. P. Gordon, and M. N. Islam, "Soliton propagation in long fibers
with periodically compensated loss," J. Quant. Electron., vol. 22, no. 1, pp. 157173, 1986.
[55]
C. D. Poole, "Statistical treatment of polarization dispersion in single-mode fiber,"
Opt. Lett., vol. 13, no. 8, pp. 687-689, 1988.
[56] M. Maeda, W. B. Sessa, W. I. Way, A. Yi-yan, L. Curtis, R. Spicer, and R. I. Laming,
"The effect of four-wave mixing in fibers on optical frequency-division multiplexed
systems," J. Lightwave Tech., vol. 8, pp. 1402-1408, 1990.
[57]
E. M. Dianov, A. V. Luchnikov, A. N. Pilipetskii, and A. N. Starodumov, "Longrange interaction of soliton pulse trains in a single-mode fibre," Sov. Lightwave Commun. 1, pp. 37-43, 1991.
125
[58]
J. P. Gordon and L. F. Mollenauer, "Effects of fiber nonlinearities and amplifier
spacings on ultra-long distance transmission," J. Lightwave Tech., vol. 9, no. 2, pp.
170-173, 1991.
[59]
L. F. Mollenauer, S. G. Evangelides, and H. A. Haus, "Long-distance propagation
using lumped amplifiers and dispersion shifted fiber," J. Lightwave Tech., vol. 9, no.
2, pp. 194-197, 1991.
[60]
A. Mecozzi, J. D. Moores, H. A. Haus, and Y. Lai, "Soliton transmission control,"
Opt. Lett., vol. 16, no. 23, pp. 1841-43, 1991.
[61]
Y. Kodama and A. Hasegawa, "Generation of asymptotically stable solitons and
suppression of the Gordon-Haus effect," Opt. Lett. vol. 17, pp. 31-33, 1992.
[62]
A. Mecozzi, J. D. Moores, H. A. Haus, and Y. Lai, "Modulation and filtering control
of soliton transmission," Opt. Soc. B, vol. 9, no. 8, pp. 1350-1357, 1992.
[63]
M. Nakazawa, H. Kubota, E. Yamada, and K. Suzuki, "Infinite-distance soliton
transmission with soliton controls in time and frequency domains," Electron. Lett.,
vol. 28, no. 12, pp. 1099-1100, 1992.
[64]
A. Mecozzi, "Long-distance soliton transmission with filtering," J. Opt. Soc. Am.
B10, no. 12, pp. 2321-2330, 1993.
[65]
J. D. Moores, W. S. Wong, and H. A. Haus, "Stability and timing maintenance in
soliton transmission and storage rings," Opt. Commun., vol. 113, pp. 153-175, 1994.
[66]
L. F. Mollenauer, J. P. Gordon, and S. G. Evangelides, "The sliding-frequency guiding filter: an improved form of soliton jitter control," Opt. Lett., vol. 17, pp. 1575-77,
1992.
[67]
L. F. Mollenauer and J. P. Gordon, "Birefringence-mediated timing jitter in soliton
transmission," Opt. Lett., vol. 19, no. 6, pp. 375-378, 1994.
[68] P. V. Mamyshev and L. F. Mollenauer, "Stability of soliton propagation with slidingfrequency guiding filters," Opt. Lett., vol. 19, no. 24, pp. 2083-2085, 1994.
[69]
J. P. Gordon and L. F. Mollenauer, "Soliton transmission system having sliding frequency-guiding filters," U.S. Patent No. 05357364, 1994.
[70]
L. F. Mollenauer, "Making the most of fiber nonlinearity: soliton transmission with
sliding-frequency guiding filters," in CLEO '94: Summaries of PapersPresentedat
the Conference of Lasers and Electro-Optics,vol. 8, 1994.
[71]
P. V. Mamyshev, "Long distance soliton transmission with sliding filters," Optics
and Quantum ElectronicsSeminar, MIT, Nov. 8, 1995.
[72] Y. Kodama and S. Wabnitz, "Analysis of soliton stability and interactions with sliding filters," Opt. Lett., vol. 19, no. 3, pp. 162-164, 1994.
[73]
M. Romagnoli, S. Wabnitz, and M. Midrio, "Bandwidth limits of soliton transmission with sliding filters," Opt. Commun., vol. 104, pp. 293-297, 1994.
[74]
L. F. Mollenauer and J. P. Gordon, "Birefringence-mediated timing jitter in soliton
transmission," Opt. Lett., vol. 19, no. 6, pp. 375-377, 1994.
126
[75] E. Yamada and M. Nakazawa, "Reduction of amplified spontaneous emission from a
transmitted soliton signal using a nonlinear amplifying loop mirror and a nonlinear
optical loop mirror," J. Quant. Electronics, vol.30, no.8, pp. 1842-50, 1994.
[76]
E. A. Golovchenko, A. N. Pilipetskii, C. R. Menyuk, J. P. Gordon, and L. F. Mollenauer, "Soliton propagation with up- and down-sliding frequency-guiding filters,"
Opt. Lett., vol. 20, pp. 539-41, 1995.
[77] J.-C. Dung, S. Chi, and S. Wen, "Reduction of soliton interactions by zigzag-sliding
frequency-guiding filters," Opt. Lett., vol. 20, pp. 1862-64, 1995.
[78]
H. Toda, H. Yamagishi, and A. Hasegawa, "10-GHz optical soliton transmission
experiment in a sliding-frequency recirculating fiber loop," Opt. Lett., vol. 20, no.9,
pp. 1002-4, 1995.
[79]
H. P. Yuen, "Reduction of quantum fluctuation and suppression of the Gordon-Haus
effect with phase-sensitive linear amplifiers," Opt. Lett., vol. 17, no. 1, pp. 73-75,
1992.
[80] W. Forysiak, K. J. Blow, and N. J. Doran, "Reduction of Gordon-Haus jitter by posttransmission dispersion compensation," Electron. Lett., vol. 29, pp. 1225-1226,
1993.
[81]
D. Atkinson, W. H. Loh, V. V. Afanasjev, A. B. Grudinin, A. J. Seeds, D. N. Payne,
"Increased amplifier spacing in a soliton system with quantum-well saturable
absorbers and spectral filtering," Opt. Lett., vol. 19, no. 19, pp. 1514-1516, 1994.
[82] W. Forysiak and N. J. Doran, "Reduction of Gordon-Haus jitter in soliton transmission systems by optical phase conjugation," J. Lightwave Tech., vol. 13, no. 5, pp.
850-855, 1995.
[83] A. N. Pilipetskii and C. R. Menyuk, "Acoustic effect and correlated errors in soliton
information transmission," Opt. Lett., vol. 21, no. 2, pp. 119-121, 1996.
[84] P. V. Mamyshev and L. F. Mollenauer, "Pseudo-phase-matched four-wave mixing in
soliton wavelength-division multiplexed transmission," Opt. Lett., vol. 21, no. 6, pp.
396-398, 1996.
R.8
Line monitoring
[85] E. K. Stafford, J. Mariano, M. M. Sanders, "Undersea non-repeatered technologies,
challenges, and products," AT&T Technical Journal,vol. 74, no. 1, pp. 47-59, 1995.
[86]
L. J. Marra, "Sharkbite on the SL submarine lightwave cable system: history,
causes, and resolution," IEEE J. Oceanic Engineering,vol. 14, no. 3, pp. 230-237,
1989.
[87] L. C. Blank and J. D. Cox, "Optical time domain reflectometry on optical amplifier
systems," J. Lightwave Tech., vol. 7, no. 10, pp. 1549-1555, 1989.
[88]
I. J. Hirst, A. J. Jeal, and J. Brannan, "Performance monitoring of long chains of
optical amplifiers," Electron. Lett., vol. 29, no. 3, pp. 255-256, 1993.
127
[89]
R. A. Jensen, H. L. Lang, and M. D. Tremblay, "New technology for operating and
maintaining SL2000 systems," in Tech. Dig., 2nd Int. Conf. Opt. Fiber Submarine
Telecomun. Syst., Suboptic '93, Versailles, France, paper 16.17, 1993.
[90]
R. A. Jensen, C. R. Davidson, D. L. Wilson, and J. K. Lyons, "Novel technique for
monitoring long-haul undersea optical-amplifier systems," OFC '94, paper ThR3.
[91]
Y. Horiuchi, S. Ryu, K. Mochizuki, and H. Wakabayashi, "Novel coherent heterodyne optical domain reflectometry for fault localization of optical amplifier submarine cable systems," IEEE Photon. Tech. Lett., vol. 2, no. 4, pp. 291-293, 1990.
[92] Y. Sato and K. Aoyama, "Optical time domain reflectometry in optical transmission
lines containing in-line Er-doped fiber amplifiers," J. Lightwave Tech., vol. 10, no. 1,
pp. 78-83, 1992.
[93]
J. MacKichan, J. A. Kichen, C. W. Pitt, "Innovative approach to interspan fibre
break location in fibre amplifier repeatered communication systems," Electron. Lett.,
vol. 28, no. 7, pp. 626-629, 1992.
[94] Y. K. Chen, S. Chi, "Novel technique for all-haul optical time domain reflectometry
using optical fiber amplifier and switches," CLEO '94 paper CTHI40.
[95] Y. W. Lai, Y. K. Chen, W. I. Way, "Novel supervisory technique using wavelengthdivision-multiplexed OTDR in EDFA repeatered transmission systems," IEEE Photon. Tech. Lett., vol. 6, no. 3, pp. 446-449, 1994.
[96] Y. K. Chen, W. Y. Guo, W. I. Way, and S. Chi, "Simultaneous in-service fault-locating and EDFA-monitoring supervisory transmission in EDFA-repeatered system,"
Electron. Lett., vol. 30, no. 25, pp. 2145-2146, 1994.
[97] Y. K. Chen, W. Y. Guo, S. Chi, and W. I. Way, "Demonstration of in-service supervisory repeaterlesss bidirectional wavelength-division-multiplexing transmission system," IEEE Photon. Tech. Lett., vol. 7, no. 9, pp. 1084-1086, 1995.
[98]
Y. Kobayashi, "A repeater fault locator using a correlation technique for a submarine coaxial system," IEEE Trans. on Commun., vol. COM-30, pp. 1117-1124, 1992.
[99]
F. I. Khatri, S. G. Evangelides, P. V. Mamyshev, B. M. Nyman, and H. A. Haus,
"Line-monitoring system for undersea soliton transmission systems with sliding frequency-guiding filters," paper ThH6, OpticalFiberCommunication Conference, San
Jose, CA, February 1996.
[100] F. I. Khatri, S. G. Evangelides, P. V. Mamyshev, B. M. Nyman, and H. A. Haus,
"Line-monitoring system for undersea soliton transmission systems with sliding frequency-guiding filters," IEEE Photon. Tech. Lett., vol. 8, no. 5, 1996.
[101] F. I. Khatri, S. G. Evangelides, P. V. Mamyshev, B. M. Nyman, and H. A. Haus, "A
line-monitoring system for soliton systems with sliding frequency-guiding filters,"
submitted to U.S. Patent office, October 1995.
[102] R. L. Mortenson, B. S. Jackson, S. Shapiro, and W. E Sirocky, "Undersea optically
amplified repeatered technology, products, and challenges," AT&T Technical Journal, vol. 74, pp. 33-46, 1995.
[103] Private communication with E. P. Ippen.
[104] R. A. Jensen, D. J. Gardner, C. J. Chen, O. Calvo, D. G. Duff, "Monitoring longhaul undersea WDM systems using optical side tones," paper TuN6, Optical Fiber
Communication Conference, San Jose, CA, February 1996.
R.9
Classical theoretical treatments
[105] V. E. Zakharov and A. B. Shabat, "Exact theory of two-dimensional self-focusing
and one-dimensional modulation of waves in nonlinear media," Sov. Phys. JETP,
vol. 34, pp. 62-69, 1972.
[106] H. A. Haus and M. N. Islam, "Theory of the soliton laser," J. Quant. Electron., vol.
QE-21, pp. 1172-1187, 1985.
[107] H. A. Haus and Y. Lai, "Quantum theory of soliton squeezing: a linearized
approach," J. Opt. Soc. Am. B7, pp. 386-392, 1990.
[108] D. J. Kaup, "Perturbation theory for solitons in optical fibers", Phys. Rev. A, vol. 42,
pp. 5689-94, 1990.
R.10 Solitons and continuum
[109] S. M. J. Kelly, "Characteristic sideband instability of periodically amplified average
soliton," Electron. Lett., vol. 28, pp. 806-807, 1992.
[110] J. P. Gordon, "Dispersive perturbations of solitons of the nonlinear Schr6dinger
equation," J. Opt. Soc. Am. B9, pp. 91-97 1992.
[111] F. Matera, A. Mecozzi, M. Romagnoli, and M. Settembre, "Sideband instability
induced by periodic power variation in long-distance fiber links," Opt. Lett., vol. 18,
pp. 1499-1501, 1993.
[112] W. H. Loh, A. B. Grudinin, V. V. Afanasjev, and D. N. Payne, "Soliton interaction in
the presence of a weak non-soliton component," Opt. Lett., vol. 19, no. 10, pp. 698700, 1994.
[113] H. A. Haus, F. I. Khatri, and W. S. Wong, "Soliton interaction with continuum," presented at the Conference on Ultrafast Transmission Systems in Optical Fibres, Trieste, Italy, Feb. 1995.
[114] H. A. Haus, E. P. Ippen, W. S. Wong, F. I. Khatri, and K. R. Tamura, "Pulse selfordering in soliton fiber lasers," paper JTuA7, Conference on Lasers and ElectroOptics, Baltimore, MD, May 1995.
[115] H. A. Haus, F. I. Khatri, W. S. Wong, E. P. Ippen, and K. R. Tamura, "Interaction of
soliton with sinusoidal wave packet," J. Quant.Electronics,vol. 32, no. 6, 1996.
[116] H. A. Haus, W. S. Wong, and F. I. Khatri, "Continuum generation by perturbation of
soliton," to be published in J. Opt. Soc. Am. B, 1996.
R.11 Theses and reports
[117] J. D. Moores, Collisions of Orthogonally Polarized Solitary Waves, M.I.T. S. M.
Thesis, 1989.
129
[118] J. D. Moores, Switching and Limitations for All-Optical Soliton Communications.
M.I.T. Ph.D. Thesis, 1994.
[119] K. R. Tamura, Four Wave Mixing in OpticalFibers, M.I.T Ph.D. Area Examination,
1994.
130