Metastability in systems of coupled multistable SDEs Nils Berglund
advertisement

Statistical mechanics and computation of large deviation rate functions
Metastability
in systems of coupled multistable SDEs
Nils Berglund
MAPMO, Université d’Orléans
ENS Lyon, June 16, 2015
With Sébastien Dutercq (Orléans),
Bastien Fernandez (Marseille/Paris) and Barbara Gentz (Bielefeld)
Nils Berglund
nils.berglund@univ-orleans.fr
http://www.univ-orleans.fr/mapmo/membres/berglund/
Interacting SDEs with noise
Example 1 [B, Fernandez, Gentz, Nonlinearity 2007]
x7
.
N particles on a circle Z/NZ
.
Bistable local dynamics
.
Ferromagnetic nearest neighbour coupling
.
Independent noise on each site
x0
x6
x5
x1
x2
x4
x3
√
γ
dxti = xti − (xti )3 dt + xti+1 − 2xti + xti−1 dt + 2ε dWti
2
√
dxt = −∇V (xt ) dt + 2ε dWt
X
γ X i+1
potential V (x) =
U(x i ) +
(x
− x i )2
U(ξ) = 14 ξ 4 − 12 ξ 2
4
Gradient system
i
Metastability in systems of coupled multistable SDEs
i
June 16, 2015
1 / 14
Interacting SDEs with noise
Example 1 [B, Fernandez, Gentz, Nonlinearity 2007]
x7
.
N particles on a circle Z/NZ
.
Bistable local dynamics
.
Ferromagnetic nearest neighbour coupling
.
Independent noise on each site
x0
x6
x5
x1
x2
x4
x3
√
γ
dxti = xti − (xti )3 dt + xti+1 − 2xti + xti−1 dt + 2ε dWti
2
√
dxt = −∇V (xt ) dt + 2ε dWt
X
γ X i+1
potential V (x) =
U(x i ) +
(x
− x i )2
U(ξ) = 14 ξ 4 − 12 ξ 2
4
Gradient system
i
Metastability in systems of coupled multistable SDEs
i
June 16, 2015
1 / 14
Interacting SDEs with noise
Example 1 [B, Fernandez, Gentz, Nonlinearity 2007]
x7
.
N particles on a circle Z/NZ
.
Bistable local dynamics
.
Ferromagnetic nearest neighbour coupling
.
Independent noise on each site
x0
x1
x6
x5
x2
x3
x4
√
γ
dxti = xti − (xti )3 dt + xti+1 − 2xti + xti−1 dt + 2ε dWti
2
√
dxt = −∇V (xt ) dt + 2ε dWt
X
γ X i+1
potential V (x) =
U(x i ) +
(x
− x i )2
U(ξ) = 14 ξ 4 − 12 ξ 2
4
Gradient system
i
i
Example 2 [B, Dutercq, JoTP 2015]: Same potential + constraint
Metastability in systems of coupled multistable SDEs
June 16, 2015
P
i
xi = 0
1 / 14
General gradient systems with noise
dxt = −∇V (xt ) dt +
√
2ε dWt
V : RN → R: confining potential, class C 2
.
Stationary points: X = {x : ∇V (x) = 0}
.
Local minima: X0 = {x ∈ X : all ev of Hessian ∇2 V (x) are > 0}
.
Saddles of index 1: X1 = {x ∈ X : ∇2 V (x) has 1 negative ev }
Dynamics ∼ markovian jump process on G = (X0 , E), E ⊂ X1
Metastability in systems of coupled multistable SDEs
June 16, 2015
2 / 14
General gradient systems with noise
dxt = −∇V (xt ) dt +
√
2ε dWt
V : RN → R: confining potential, class C 2
.
Stationary points: X = {x : ∇V (x) = 0}
.
Local minima: X0 = {x ∈ X : all ev of Hessian ∇2 V (x) are > 0}
.
Saddles of index 1: X1 = {x ∈ X : ∇2 V (x) has 1 negative ev }
Dynamics ∼ markovian jump process on G = (X0 , E), E ⊂ X1
Metastability in systems of coupled multistable SDEs
June 16, 2015
2 / 14
General gradient systems with noise
dxt = −∇V (xt ) dt +
√
2ε dWt
V : RN → R: confining potential, class C 2
.
Stationary points: X = {x : ∇V (x) = 0}
.
Local minima: X0 = {x ∈ X : all ev of Hessian ∇2 V (x) are > 0}
.
Saddles of index 1: X1 = {x ∈ X : ∇2 V (x) has 1 negative ev }
Dynamics ∼ markovian jump process on G = (X0 , E), E ⊂ X1
Metastability in systems of coupled multistable SDEs
June 16, 2015
2 / 14
Wentzell–Freidlin theory
dxt = f (xt ) dt +
√
2ε dWt
1
Large-deviation rate function: I[0,T ] (ϕ) =
2
T
Z
kϕ̇(t) − f (ϕ(t))k2 dt
0
Noise-induxed exit from domain D containing unique attractor x ?
.
Mean exit time:
V (x ∗ , z) = inf inf
I[0,T ] (ϕ)
lim 2ε log E x0 [τ ] = inf V (x ∗ , z)
ε→0
T >0 ϕ:x ∗ →z
z∈∂D
Gradient case: V (x ∗ , z) = 2 V (z) − V (x ∗ )
.
Exit location: concentrated where V is minimal
.
Case of multiple attractors: V (k) =
min
X
g W -graph,|W |=k
V (α, β)
(α→β)∈g
Small eigenval. λk of generator satisfy − lim ε log(|λk |) = V (k) − V (k+1)
ε→0
Efficient computation of λk : [Cameron and Vanden–Eijnden 2014]
Metastability in systems of coupled multistable SDEs
June 16, 2015
3 / 14
Wentzell–Freidlin theory
dxt = f (xt ) dt +
√
2ε dWt
1
Large-deviation rate function: I[0,T ] (ϕ) =
2
T
Z
kϕ̇(t) − f (ϕ(t))k2 dt
0
Noise-induxed exit from domain D containing unique attractor x ?
.
Mean exit time:
V (x ∗ , z) = inf inf
I[0,T ] (ϕ)
lim 2ε log E x0 [τ ] = inf V (x ∗ , z)
ε→0
T >0 ϕ:x ∗ →z
z∈∂D
Gradient case: V (x ∗ , z) = 2 V (z) − V (x ∗ )
.
Exit location: concentrated where V is minimal
.
Case of multiple attractors: V (k) =
min
X
g W -graph,|W |=k
V (α, β)
(α→β)∈g
Small eigenval. λk of generator satisfy − lim ε log(|λk |) = V (k) − V (k+1)
ε→0
Efficient computation of λk : [Cameron and Vanden–Eijnden 2014]
Metastability in systems of coupled multistable SDEs
June 16, 2015
3 / 14
Eyring–Kramers law
for dxt = −∇V (xt ) dt +
√
2ε dWt
Definition: Communication height
H(xi∗ , xj∗ ) =
inf
γ:xi∗ →xj∗
sup V (γt ) − V (xi∗ )
∗
z2∗ = z21
t
∗
z3∗ = z32
= V (zij∗ ) − V (xi∗ )
H3 = H(x3∗ , x2∗ )
H2 = H(x2∗ , x1∗ )
Definition: Metastable hierarchy
x1∗ ≺ x2∗ ≺ · · · ≺ xn∗ ⇔ ∃θ > 0: ∀k
∗ })
Hk := H(xk∗ , {x1∗ , . . . , xk−1
∗
∗
∗
∗
, . . . , xk∗ }) − θ
6 min H(xi , {x1 , . . . , xi−1 , xi+1
i<k
Metastability in systems of coupled multistable SDEs
x2∗
June 16, 2015
x3∗
x1∗
4 / 14
Eyring–Kramers law
for dxt = −∇V (xt ) dt +
√
2ε dWt
Definition: Communication height
H(xi∗ , xj∗ ) =
inf
γ:xi∗ →xj∗
sup V (γt ) − V (xi∗ )
∗
z2∗ = z21
t
∗
z3∗ = z32
= V (zij∗ ) − V (xi∗ )
H3 = H(x3∗ , x2∗ )
H2 = H(x2∗ , x1∗ )
Definition: Metastable hierarchy
x1∗ ≺ x2∗ ≺ · · · ≺ xn∗ ⇔ ∃θ > 0: ∀k
∗ })
Hk := H(xk∗ , {x1∗ , . . . , xk−1
∗
∗
∗
∗
, . . . , xk∗ }) − θ
6 min H(xi , {x1 , . . . , xi−1 , xi+1
i<k
Theorem: Eyring–Kramers law
x3∗
x2∗
x1∗
[Bovier,Eckhoff,Gayrard,Klein 2004]
λk = k th ev of generator
τk = first-hitting times
of nbh of {x1∗ , . . . , xk∗ }
|det ∇2 V (zk∗ )| Hk /ε 2π
∗
E xk [τk−1 ] =
e
1 + Oε (1) ' |λk |−1
∗
∗
2
|λ− (zk )| det ∇ V (xk )
Metastability in systems of coupled multistable SDEs
June 16, 2015
4 / 14
Potential landscape for Example 1
V (x) =
X
i∈Z/NZ
U(x i ) +
γ X
(x i+1 − x i )2
4
U(ξ) = 14 ξ 4 − 12 ξ 2
i∈Z/NZ
γ = 0: X = {−1, 0, 1}N , X0 = {−1, 1}N , X1 = {x ∈ X : one x i = 0}
Metastability in systems of coupled multistable SDEs
June 16, 2015
5 / 14
Potential landscape for Example 1
V (x) =
X
U(x i ) +
i∈Z/NZ
γ X
(x i+1 − x i )2
4
U(ξ) = 14 ξ 4 − 12 ξ 2
i∈Z/NZ
γ = 0: X = {−1, 0, 1}N , X0 = {−1, 1}N , X1 = {x ∈ X : one x i = 0}
Theorem
[BFG, Nonlinearity 2007]
No bifurcation for 0 6 γ 6
where γ ∗ (N) >
1
4
γ ∗ (N)
∀N > 2
Vγ (zγ∗ ) = V0 (z0∗ ) + γ(# interfaces) + · · ·
Ising-like dynamics
Metastability in systems of coupled multistable SDEs
+++++
++
−+++++
−++++−
−+++−−
−−++−−
−−+−−−
−−−−−−
June 16, 2015
5 / 14
Potential landscape for Example 1
V (x) =
X
U(x i ) +
i∈Z/NZ
γ X
(x i+1 − x i )2
4
U(ξ) = 14 ξ 4 − 12 ξ 2
i∈Z/NZ
γ = 0: X = {−1, 0, 1}N , X0 = {−1, 1}N , X1 = {x ∈ X : one x i = 0}
Theorem
[BFG, Nonlinearity 2007]
No bifurcation for 0 6 γ 6
where γ ∗ (N) >
1
4
γ ∗ (N)
∀N > 2
Vγ (zγ∗ ) = V0 (z0∗ ) + γ(# interfaces) + · · ·
Ising-like dynamics
Theorem
γ>
+++++
++
−+++++
−++++−
−+++−−
−−++−−
−−+−−−
−−−−−−
[BFG, Nonlinearity 2007]
1
2 sin2 (π/N)
⇔ X0 = {±(1, . . . , 1)}, X1 = {0} ⇔ Synchronization
Metastability in systems of coupled multistable SDEs
June 16, 2015
5 / 14
Transition to synchronization
Symmetry group
G = DN × Z2 = hr , s, ci
r (x) = (x 2 , x 3 , . . . , x N , x 1 )
s(x) = (x N , x N−1 , . . . , x 1 )
c(x) = −x
X partitionned into
group orbits Ox = {gx : g ∈ G }
Stabilizer: Gx = {g ∈ G : gx = x}
⇒ |Ox ||Gx | = |G |
Useful to study bifurcation diagram
Metastability in systems of coupled multistable SDEs
June 16, 2015
6 / 14
Transition to synchronization
Symmetry group
G = DN × Z2 = hr , s, ci
2
3
N
N−1
0
N
1
r (x) = (x , x , . . . , x , x )
s(x) = (x , x
1
,...,x )
c(x) = −x
X partitionned into
group orbits Ox = {gx : g ∈ G }
Stabilizer: Gx = {g ∈ G : gx = x}
⇒ |Ox ||Gx | = |G |
Useful to study bifurcation diagram
Metastability in systems of coupled multistable SDEs
1
3
γ!
γ̃1
[×2]
(1, 1, 1, 1)
[×1]
(0, 0, 0, 0)
[×2]
(1, −1, 1, −1)
2
5
1
2
2
3
1
γ̃2
γ
(x, x, x, x)
(0, 0, 0, 0)
[×4]
(1, 0, 1, 0)
[×8]
(1, 0, 1, −1)
[×8]
(1, −1, 0, 0)
[×8]
(0, 1, 0, 0)
[×4]
(1, 0, −1, 0)
[×4]
(1, 1, −1, −1)
[×8]
(1, 1, 0, 0)
[×16]
(1, 1, 0, −1)
[×8]
(1, 1, 1, −1)
[×8]
(1, 1, 1, 0)
(x, −x, x, −x)
I±
O
A(2)
(x, y, x, y)
(x, y, x, z)
(x, −x, y, −y)
(x, y, x, z)
B
(x, 0, −x, 0)
A
(x, x, −x, −x)
(x, x, y, y)
Aa
(x, y, z, t)
(x, y, x, z)
(x, y, x, z)
I+
Aaα
∂a
Aaα
∂a
∂b
Aaα
A
I − ∂b
I+
Aa
I+
A
I−
I−
Figure 1
Example: N = 4, |X | =
June 16, 2015
I+
A
I−
34
I+
A
O
I−
for γ = 0
6 / 14
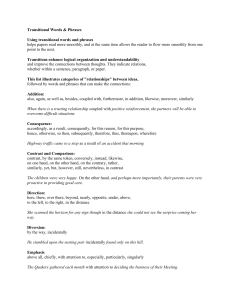
Transition to synchronization
Symmetry group
G = DN × Z2 = hr , s, ci
2
3
N
N−1
0
N
1
r (x) = (x , x , . . . , x , x )
s(x) = (x , x
1
,...,x )
c(x) = −x
X partitionned into
group orbits Ox = {gx : g ∈ G }
Stabilizer: Gx = {g ∈ G : gx = x}
⇒ |Ox ||Gx | = |G |
Useful to study bifurcation diagram
1
3
γ!
γ̃1
[×2]
(1, 1, 1, 1)
[×1]
(0, 0, 0, 0)
[×2]
(1, −1, 1, −1)
2
5
1
2
2
3
1
γ̃2
γ
(x, x, x, x)
(0, 0, 0, 0)
[×4]
(1, 0, 1, 0)
[×8]
(1, 0, 1, −1)
[×8]
(1, −1, 0, 0)
[×8]
(0, 1, 0, 0)
[×4]
(1, 0, −1, 0)
[×4]
(1, 1, −1, −1)
[×8]
(1, 1, 0, 0)
[×16]
(1, 1, 0, −1)
[×8]
(1, 1, 1, −1)
[×8]
(1, 1, 1, 0)
(x, −x, x, −x)
O
A(2)
(x, y, x, y)
(x, y, x, z)
(x, −x, y, −y)
(x, y, x, z)
B
(x, 0, −x, 0)
A
(x, x, −x, −x)
(x, x, y, y)
Aa
(x, y, z, t)
(x, y, x, z)
(x, y, x, z)
I+
Aaα
∂a
Aaα
∂a
∂b
Aaα
A
I − ∂b
I+
Aa
I+
A
I−
I+
A
I−
Figure 1
Example: N = 4, |X | =
I+
A
O
I−
34
I−
for γ = 0
Problem: no metastable hierarchy ⇒ Usual Eyring–Kramers law invalid
Metastability in systems of coupled multistable SDEs
I±
June 16, 2015
6 / 14
Limitations of the standard Eyring–Kramers law
.
Question 1:
What happens when V is invariant under a group of symmetries?
(no metastable hierarchy)
.
Question 2:
What happens when V has saddles with zero eigenvalues?
(det ∇2 V (z ∗ ) = 0 at bifurcations)
.
Question 3:
What happens when γ ∼ N 2 and N → ∞ in example 1?
One expects convergence to Allen–Cahn SPDE
∂t u(t, x) =
√
γ
3
2εξ(t, x)
∆u(t,
x)
+
u(t,
x)
−
u(t,
x)
+
N2
where ξ is space-time white noise
Is there an Eyring–Kramers law for such SPDEs?
Metastability in systems of coupled multistable SDEs
June 16, 2015
7 / 14
Limitations of the standard Eyring–Kramers law
.
Question 1:
What happens when V is invariant under a group of symmetries?
(no metastable hierarchy)
.
Question 2:
What happens when V has saddles with zero eigenvalues?
(det ∇2 V (z ∗ ) = 0 at bifurcations)
.
Question 3:
What happens when γ ∼ N 2 and N → ∞ in example 1?
One expects convergence to Allen–Cahn SPDE
∂t u(t, x) =
√
γ
3
2εξ(t, x)
∆u(t,
x)
+
u(t,
x)
−
u(t,
x)
+
N2
where ξ is space-time white noise
Is there an Eyring–Kramers law for such SPDEs?
Metastability in systems of coupled multistable SDEs
June 16, 2015
7 / 14
Limitations of the standard Eyring–Kramers law
.
Question 1:
What happens when V is invariant under a group of symmetries?
(no metastable hierarchy)
.
Question 2:
What happens when V has saddles with zero eigenvalues?
(det ∇2 V (z ∗ ) = 0 at bifurcations)
.
Question 3:
What happens when γ ∼ N 2 and N → ∞ in example 1?
One expects convergence to Allen–Cahn SPDE
∂t u(t, x) =
√
γ
3
2εξ(t, x)
∆u(t,
x)
+
u(t,
x)
−
u(t,
x)
+
N2
where ξ is space-time white noise
Is there an Eyring–Kramers law for such SPDEs?
Metastability in systems of coupled multistable SDEs
June 16, 2015
7 / 14
Q1: Markovian jump processes with symmetries
Generator L: transition rates Lij =
cij
mi
e−hij /ε ,
cij = cji
∀i, j ∈ X0
Assumptions
.
Reversibility: mi e−Vi /ε Lij = mj e−Vj /ε Lji
.
Symmetry: Lij = Lg (i)g (j) ∀g ∈ G , (G , ∗) a finite group
i.e. π(g )L = Lπ(g ) where π(g )ab = 1{g (a)=b} permutation matrix
.
Metastable order on the set of G -orbits A1 ≺ · · · ≺ Am
.
No accidental degeneracy
Metastability in systems of coupled multistable SDEs
∀i, j ∈ X0
June 16, 2015
8 / 14
Q1: Markovian jump processes with symmetries
Generator L: transition rates Lij =
cij
mi
e−hij /ε ,
cij = cji
∀i, j ∈ X0
Assumptions
.
Reversibility: mi e−Vi /ε Lij = mj e−Vj /ε Lji
.
Symmetry: Lij = Lg (i)g (j) ∀g ∈ G , (G , ∗) a finite group
i.e. π(g )L = Lπ(g ) where π(g )ab = 1{g (a)=b} permutation matrix
.
Metastable order on the set of G -orbits A1 ≺ · · · ≺ Am
.
No accidental degeneracy
Main observation:
∀i, j ∈ X0
π is a representation: π(g ∗ h) = π(g )π(h) ∀g , h ∈ G
Representation theory of finite groups: π =
where π (p) : irreducible representations of G
P (p) L = LP (p)
Lr −1
p=0 α
(p) π (p)
p = 0, . . . , r − 1
where P (p) : projector on im π (p) ⇒ each subspace P (p) Cn invariant for L
Each restricted generator satisfies an asymmetric Eyring–Kramers law
Metastability in systems of coupled multistable SDEs
June 16, 2015
8 / 14
Q1: Modified Eyring–Kramers law
Trivial representation: π (0) (g ) = 1 ∀g
⇒
m ev (m = # orbits)
Theorem [B, Dutercq, J Theor Proba 2015]
k 6 m, initial distribution µ uniform on each Ai , i > k
τk−1 = first-hitting time of A1 ∪ A2 ∪ · · · ∪ Ak−1
Ga := {g : g (a) = a}
E µ [τk−1 ] =
1 + O(e−θ/ε )
|Gai ∩ Gaj | mak Hk /ε e
1 + O(e−θ/ε ) =
(0)
|Gak | cai aj
λ
k
where ak ∈ Ak , (ai , aj ) relevant saddle for Hk := H(Ak , A1 ∪ · · · ∪ Ak−1 )
Other representations: Similar result for process on set of active orbits
(p)
(p)
⇒ clustering of eigenvalues: λk = Ck e−Hk /ε
Case of diffusions: similar results [S. Dutercq, PhD thesis, 2015]
Metastability in systems of coupled multistable SDEs
June 16, 2015
9 / 14
Q1: Modified Eyring–Kramers law
Trivial representation: π (0) (g ) = 1 ∀g
⇒
m ev (m = # orbits)
Theorem [B, Dutercq, J Theor Proba 2015]
k 6 m, initial distribution µ uniform on each Ai , i > k
τk−1 = first-hitting time of A1 ∪ A2 ∪ · · · ∪ Ak−1
Ga := {g : g (a) = a}
E µ [τk−1 ] =
1 + O(e−θ/ε )
|Gai ∩ Gaj | mak Hk /ε e
1 + O(e−θ/ε ) =
(0)
|Gak | cai aj
λ
k
where ak ∈ Ak , (ai , aj ) relevant saddle for Hk := H(Ak , A1 ∪ · · · ∪ Ak−1 )
Other representations: Similar result for process on set of active orbits
(p)
(p)
⇒ clustering of eigenvalues: λk = Ck e−Hk /ε
O(ε)
H3
H2
H1
−ε log(−λ)
Case of diffusions: similar results [S. Dutercq, PhD thesis, 2015]
Metastability in systems of coupled multistable SDEs
June 16, 2015
9 / 14
Q1: Modified Eyring–Kramers law
Trivial representation: π (0) (g ) = 1 ∀g
⇒
m ev (m = # orbits)
Theorem [B, Dutercq, J Theor Proba 2015]
k 6 m, initial distribution µ uniform on each Ai , i > k
τk−1 = first-hitting time of A1 ∪ A2 ∪ · · · ∪ Ak−1
Ga := {g : g (a) = a}
E µ [τk−1 ] =
1 + O(e−θ/ε )
|Gai ∩ Gaj | mak Hk /ε e
1 + O(e−θ/ε ) =
(0)
|Gak | cai aj
λ
k
where ak ∈ Ak , (ai , aj ) relevant saddle for Hk := H(Ak , A1 ∪ · · · ∪ Ak−1 )
Other representations: Similar result for process on set of active orbits
(p)
(p)
⇒ clustering of eigenvalues: λk = Ck e−Hk /ε
O(ε)
H3
H2
H1
−ε log(−λ)
Case of diffusions: similar results [S. Dutercq, PhD thesis, 2015]
Metastability in systems of coupled multistable SDEs
June 16, 2015
9 / 14
Q2: Eyring–Kramers law for nonquadratic saddles
Facts from potential theory: A, B ⊂ Rd , τA = inf{t > 0 : xt ∈ A}
Committor function: hA,B (x) = P x {τA < τB }
Z
Capacity: cap(A, B) =
k∇hA,B (x)k2 e−V (x)/ε dx
(A∪B)c
Z
hB,A (y ) e−V (y )/ε dy
Ac
cap(B, A)
= E µ [τA ]
Metastability in systems of coupled multistable SDEs
B=Bε (x))
'
E x [τA ]
June 16, 2015
(supp µ ⊂ ∂B)
10 / 14
Q2: Eyring–Kramers law for nonquadratic saddles
Facts from potential theory: A, B ⊂ Rd , τA = inf{t > 0 : xt ∈ A}
Committor function: hA,B (x) = P x {τA < τB }
Z
Capacity: cap(A, B) =
k∇hA,B (x)k2 e−V (x)/ε dx
(A∪B)c
Z
hB,A (y ) e−V (y )/ε dy
Ac
cap(B, A)
= E µ [τA ]
B=Bε (x))
'
E x [τA ]
(supp µ ⊂ ∂B)
Theorem: [B & Gentz, MPRF 2010]
.
Saddle in 0, separating A and B
P
V (x) = −u1 (x1 ) + u2 (x2 , . . . , xq ) + 12 dj=q+1 λj xj2 + · · · , λj > 0
Z
s
e−u2 (x2 ,...,xq )/ε dx2 . . . dxq Y
d
2πε Z
cap(A, B) = ε
1 + O((ε|log ε|)α )
λj
j=q+1
e−u1 (x1 )/ε dx1
.
with α related to growth of u1 and u2
Metastability in systems of coupled multistable SDEs
June 16, 2015
10 / 14
Q2: Example – Transverse pitchfork bifurcation
d
1
1
1X
V (x) = − |λ1 |x12 + λ2 x22 + C4 x24 +
λj xj2 + · · ·
2
2
2
j=3
λ2 > 0
s
x
E [τA ] = 2π
λ2 = 0
λ2 < 0
√
(λ2 + 2εC4 )λ3 . . . λd
eV (x,A)/ε
√
1 + R(ε)
2
|λ1 | det(∇ V (x)) Ψ+ (λ2 / 2εC4 )
for λ2 > 0 where
q
2
Ψ+ (α) = α(1+α)
eα /16 K1/4
8π
α2
16
limα→+∞ Ψ+ (α) = 1
limα→0 Ψ+ (α) = 2Γ(1/4)
5/4 π 1/2 ' 0.860
Similar expression for λ2 < 0
with Ψ− (α) involving I±1/4
Metastability in systems of coupled multistable SDEs
June 16, 2015
11 / 14
Q2: Example – Transverse pitchfork bifurcation
d
1
1
1X
V (x) = − |λ1 |x12 + λ2 x22 + C4 x24 +
λj xj2 + · · ·
2
2
2
j=3
λ2 > 0
s
x
E [τA ] = 2π
λ2 = 0
λ2 < 0
√
(λ2 + 2εC4 )λ3 . . . λd
eV (x,A)/ε
√
1 + R(ε)
2
|λ1 | det(∇ V (x)) Ψ+ (λ2 / 2εC4 )
for λ2 > 0 where
q
2
Ψ+ (α) = α(1+α)
eα /16 K1/4
8π
2
α2
16
limα→+∞ Ψ+ (α) = 1
limα→0 Ψ+ (α) = 2Γ(1/4)
5/4 π 1/2 ' 0.860
Similar expression for λ2 < 0
with Ψ− (α) involving I±1/4
Metastability in systems of coupled multistable SDEs
prefactor
of E x [τA ]
ε = 0.5
1
ε = 0.1
ε = 0.01
0
-5
-4
-3
-2
-1
0
June 16, 2015
1
2
3
4
5
λ2
11 / 14
Q3: Eyring–Kramers law for parabolic SPDEs
∂t ut (x) = ∂xx ut (x) + f (ut (x)) +
√
e.g. f (u) = u − u 3
2ε ξ(t, x)
x ∈ [0, L] with periodic or Neumann b.c.
X
zk (t) ei πkx/L ⇒
ut (x) = √1L
Z L h k∈Z
i
1 02
1 2
1 4
V =
u
−
u
+
u
dx =
2
2
4
0
dzt = −∇V (zt ) dt +
1
2
X
λk |zk |2 +
X
1
4L
P
k∈Z
√
2ε dWt
zk1 zk2 zk3 zk4
ki =0
Initial cond u− ≡ −1. Target u+ ≡ 1, τ+ = inf{t > 0 : kut − u+ k∞ } < ρ
Transition state: (β = 1 for Neumann b.c. β = 2 for periodic b.c.)
(
u0 (x) ≡ 0
if L 6 βπ
uts (x) =
u1 (x) β-kink stationary sol. if L > βπ
with ev λk =( βkπ
)2 −1
L
[Faris & Jona-Lasinio 82]: LDP ⇒ E uin [τ+ ] ' e(V [uts ]−V [u− ])/ε
[Maier & Stein 01]:qformal computation; for Neumann b.c.
⇒ E uin [τ+ ] = 2π
1
|λ0 |ν0
Q∞
λk
k=1 νk
Metastability in systems of coupled multistable SDEs
e(V [uts ]−V [u− ])/ε
June 16, 2015
(νk = ev at u− )
12 / 14
Q3: Eyring–Kramers law for parabolic SPDEs
∂t ut (x) = ∂xx ut (x) + f (ut (x)) +
√
e.g. f (u) = u − u 3
2ε ξ(t, x)
x ∈ [0, L] with periodic or Neumann b.c.
X
zk (t) ei πkx/L ⇒
ut (x) = √1L
Z L h k∈Z
i
1 02
1 2
1 4
V =
u
−
u
+
u
dx =
2
2
4
0
dzt = −∇V (zt ) dt +
1
2
X
λk |zk |2 +
X
1
4L
P
k∈Z
√
2ε dWt
zk1 zk2 zk3 zk4
ki =0
Initial cond uin ' −1. Target u+ ≡ 1, τ+ = inf{t > 0 : kut − u+ k∞ } < ρ
Transition state: (β = 1 for Neumann b.c. β = 2 for periodic b.c.)
(
u0 (x) ≡ 0
if L 6 βπ
uts (x) =
u1 (x) β-kink stationary sol. if L > βπ
with ev λk =( βkπ
)2 −1
L
[Faris & Jona-Lasinio 82]: LDP ⇒ E uin [τ+ ] ' e(V [uts ]−V [u− ])/ε
[Maier & Stein 01]:qformal computation; for Neumann b.c.
⇒ E uin [τ+ ] = 2π
1
|λ0 |ν0
Q∞
λk
k=1 νk
Metastability in systems of coupled multistable SDEs
e(V [uts ]−V [u− ])/ε
June 16, 2015
(νk = ev at u− )
12 / 14
Q3: Eyring–Kramers law for parabolic SPDEs
∂t ut (x) = ∂xx ut (x) + f (ut (x)) +
√
e.g. f (u) = u − u 3
2ε ξ(t, x)
x ∈ [0, L] with periodic or Neumann b.c.
X
zk (t) ei πkx/L ⇒
ut (x) = √1L
Z L h k∈Z
i
1 02
1 2
1 4
V =
u
−
u
+
u
dx =
2
2
4
0
dzt = −∇V (zt ) dt +
1
2
X
λk |zk |2 +
X
1
4L
P
k∈Z
√
2ε dWt
zk1 zk2 zk3 zk4
ki =0
Initial cond uin ' −1. Target u+ ≡ 1, τ+ = inf{t > 0 : kut − u+ k∞ } < ρ
Transition state: (β = 1 for Neumann b.c. β = 2 for periodic b.c.)
(
u0 (x) ≡ 0
if L 6 βπ
uts (x) =
u1 (x) β-kink stationary sol. if L > βπ
with ev λk =( βkπ
)2 −1
L
[Faris & Jona-Lasinio 82]: LDP ⇒ E uin [τ+ ] ' e(V [uts ]−V [u− ])/ε
[Maier & Stein 01]:qformal computation; for Neumann b.c.
Q
⇒ E uin [τ+ ] ' 2π
1
|λ0 |ν0
∞ λk
k=1 νk
Metastability in systems of coupled multistable SDEs
e(V [uts ]−V [u− ])/ε
June 16, 2015
(νk = ev at u− )
12 / 14
Q3: Eyring–Kramers law for parabolic SPDEs
Theorem: [B & Gentz, Elec J Proba 2013]
Neumann b.c:
.
If L < π − c, then
v
u
∞
u 1 Y
λk (V [uts ]−V [u− ])/ε uin
t
E [τ+ ] = 2π
e
1 + O(ε1/2 |log ε|3/2 )
|λ0 |ν0
νk
k=1
1
2
.
If L > π + c, then same formula with extra factor
(since 2 saddles)
.
If π − c 6 L 6 π, then
v
√
u
∞
u λ1 + C ε Y
λk e(V [uts ]−V [u− ])/ε uin
√
1 + R(ε)
E [τ+ ] = 2π t
|λ0 |ν0 ν1
νk Ψ+ (λ1 / C ε)
k=2
with Ψ+ as before
.
If π 6 L 6 π + c, similar formula with Ψ−
Periodic b.c: Similar expressions with different Ψ±
Metastability in systems of coupled multistable SDEs
June 16, 2015
13 / 14
Q3: Eyring–Kramers law for parabolic SPDEs
Theorem: [B & Gentz, Elec J Proba 2013]
Neumann b.c:
.
If L < π − c, then
v
u
∞
u 1 Y
λk (V [uts ]−V [u− ])/ε uin
t
E [τ+ ] = 2π
e
1 + O(ε1/2 |log ε|3/2 )
|λ0 |ν0
νk
k=1
1
2
.
If L > π + c, then same formula with extra factor
(since 2 saddles)
.
If π − c 6 L 6 π, then
v
p
u
∞
u λ1 + 3ε/2L Y
λk e(V [uts ]−V [u− ])/ε uin
p
1 + R(ε)
E [τ+ ] = 2π t
|λ0 |ν0 ν1
νk Ψ+ (λ1 / 3ε/2L)
k=2
with Ψ+ as before
.
If π 6 L 6 π + c, similar formula with Ψ−
Periodic b.c: Similar expressions with different Ψ± and extra factor ε1/2
Metastability in systems of coupled multistable SDEs
June 16, 2015
13 / 14
Concluding remarks
.
Irreversible systems:
Cycling: ∂D periodic orbit, WKB doesn’t work [Day ’92, B & Gentz ’14]
Transition-path theory [Vanden-Eijnden & E ’06, Lu & Nolen ’15]
.
SPDEs in higher space dim: Regularity structures [Hairer & Weber ’14]
References
. N. B., Bastien Fernandez and Barbara Gentz, Metastability in interacting nonlinear
.
.
.
.
.
stochastic differential equations I: From weak coupling to synchronisation
& II: Large-N behaviour, Nonlinearity 20, 2551–2581; 2583–2614 (2007)
N. B. and Barbara Gentz, Anomalous behavior of the Kramers rate at bifurcations
in classical field theories, J. Phys. A: Math. Theor. 42, 052001 (2009)
, The Eyring–Kramers law for potentials with nonquadratic saddles,
Markov Processes Relat. Fields 16, 549–598 (2010)
, Sharp estimates for metastable lifetimes in parabolic SPDEs: Kramers’
law and beyond, Electronic J. Probability 18, (24):1–58 (2013)
, On the noise-induced passage through an unstable periodic orbit II:
General case, SIAM J. Math. Anal. 46, (1):310–352 (2014)
N. B. and Sébastien Dutercq, The Eyring–Kramers law for Markovian jump
processes with symmetries, J. Theoretical Probability, Online First (2015)
Metastability in systems of coupled multistable SDEs
June 16, 2015
14 / 14