On distance of Heegaard splittings and bridge decompositions
advertisement

On distance of Heegaard splittings
and bridge decompositions
Yeonhee Jang
(joint work with Ayako Ido and Tsuyoshi Kobayashi)
Nara Women’s University
October 31, 2013
Nara International Seminar House
1 / 30
Outline
.
. .1 Curve complex
.
. .2 (Hempel) distance of Heegaard splittings
.
. .3 Proof of Main Theorem
2 / 30
Curve complex
F = F g, p : orientable surface (of genus g and with p punctures)
s.t. 3g + p − 4 > 0.
3 / 30
Curve complex
F = F g, p : orientable surface (of genus g and with p punctures)
s.t. 3g + p − 4 > 0.
.
Curve complex
..
The curve complex C(F) is a simplicial complex defined as follows:
.
.
..
k-simplex ↔ k (isotopy classes of) essential simple closed curves on
F which are mutually disjoint.
.
.
0-simplex ↔ (isotopy class of) an essential simple closed curve on F,
3 / 30
Curve complex
F = F g, p : orientable surface (of genus g and with p punctures)
s.t. 3g + p − 4 > 0.
.
Curve complex
..
The curve complex C(F) is a simplicial complex defined as follows:
.
.
..
k-simplex ↔ k (isotopy classes of) essential simple closed curves on
F which are mutually disjoint.
.
.
0-simplex ↔ (isotopy class of) an essential simple closed curve on F,
3 / 30
Curve complex
When g = 1 and p = 0 or 1, the definition of the curve complex of
F = F g, p is slightly modified:
.
Curve complex
.
..
The curve complex C(F) is a simplicial complex defined as follows:
.
..
k-simplex ↔ k (isotopy classes of) essential simple closed curves on
F which mutually intersect in one point.
.
.
0-simplex ↔ (isotopy class of) an essential simple closed curve on F,
4 / 30
Curve complex
.
..
.
.
.
Distance in the curve complex
.
..
For a, b ∈ C (0) (F),
d(a, b) = dC(F) (a, b) := (the smallest number of 1-simplexes in a path
connecting a and b in C(F)).
5 / 30
Curve complex
.
Distance in the curve complex
.
..
For a, b ∈ C (0) (F),
d(a, b) = dC(F) (a, b) := (the smallest number of 1-simplexes in a path
connecting a and b in C(F)).
.
..
.
.
A shortest path [a0 , a1 , a2 , . . . , a n] connecting two 0-simplexes a0 and
a n is called a geodesic.
5 / 30
Curve complex
.
Distance in the curve complex
.
..
For a, b ∈ C (0) (F),
d(a, b) = dC(F) (a, b) := (the smallest number of 1-simplexes in a path
connecting a and b in C(F)).
A shortest path [a0 , a1 , a2 , . . . , a n] connecting two 0-simplexes a0 and
a n is called a geodesic.
.
..
d( A, B) = dC(F) ( A, B) := min{d(a, b) | a ∈ A, b ∈ B}.
.
.
For A, B ⊂ C (0) (F),
5 / 30
Curve complex
.
Distance in the curve complex
.
..
For a, b ∈ C (0) (F),
d(a, b) = dC(F) (a, b) := (the smallest number of 1-simplexes in a path
connecting a and b in C(F)).
A shortest path [a0 , a1 , a2 , . . . , a n] connecting two 0-simplexes a0 and
a n is called a geodesic.
d( A, B) = dC(F) ( A, B) := min{d(a, b) | a ∈ A, b ∈ B}.
.
Fact (Harvey ’81, Hempel ’01)
C(F) is connected (i.e., d(a, b) < ∞ ∀ a, b : essential s.c.c. on F).
.
..
.
..
.
.
.
..
.
.
For A, B ⊂ C (0) (F),
5 / 30
Curve complex
.
Distance in the curve complex
.
..
For a, b ∈ C (0) (F),
d(a, b) = dC(F) (a, b) := (the smallest number of 1-simplexes in a path
connecting a and b in C(F)).
A shortest path [a0 , a1 , a2 , . . . , a n] connecting two 0-simplexes a0 and
a n is called a geodesic.
d( A, B) = dC(F) ( A, B) := min{d(a, b) | a ∈ A, b ∈ B}.
Fact (Harvey ’81, Hempel ’01)
C(F) is connected (i.e., d(a, b) < ∞ ∀ a, b : essential s.c.c. on F).
In fact, d(a, b) ≤ 2 + 2 log2 ι(a, b),
where
ι(a, b) is the (geometric) intersection number of a and b.
.
.
.
..
..
.
.
.
..
.
.
For A, B ⊂ C (0) (F),
5 / 30
Curve complex
β
ε
α
β
δ
α
δ
γ
ε
γ
.
Distance in the curve complex
..
.
.
.
..
.
6 / 30
Curve complex
β
ε
α
β
δ
α
δ
γ
ε
γ
.
Distance in the curve complex
..
d(a, b) = 0 ⇔ a = b ( a and b are isotopic),
.
.
.
..
.
6 / 30
Curve complex
β
ε
α
β
δ
α
δ
γ
ε
γ
.
Distance in the curve complex
..
d(a, b) = 0 ⇔ a = b ( a and b are isotopic),
.
.
..
.
.
d(a, b) = 1 ⇔ a , b and a ∩ b = ∅,
6 / 30
Curve complex
β
ε
α
β
δ
α
δ
γ
ε
γ
.
Distance in the curve complex
..
d(a, b) = 0 ⇔ a = b ( a and b are isotopic),
.
d(a, b) = 1 ⇔ a , b and a ∩ b = ∅,
.
..
.
.
d(a, b) = 2 ⇔ a ∩ b , ∅ and ∃z: s.c.c. on F disjoint from a ∪ b,
6 / 30
Curve complex
β
ε
α
β
δ
α
δ
γ
ε
γ
.
Distance in the curve complex
..
d(a, b) = 0 ⇔ a = b ( a and b are isotopic),
.
d(a, b) = 1 ⇔ a , b and a ∩ b = ∅,
d(a, b) = 2 ⇔ a ∩ b , ∅ and ∃z: s.c.c. on F disjoint from a ∪ b,
.
..
.
.
d(a, b) ≥ 3 ⇔ ( a ∩ b , ∅ and) @z: s.c.c. on F disjoint from a ∪ b
6 / 30
Curve complex
β
ε
α
β
δ
α
δ
γ
ε
γ
.
Distance in the curve complex
..
d(a, b) = 0 ⇔ a = b ( a and b are isotopic),
.
d(a, b) = 1 ⇔ a , b and a ∩ b = ∅,
d(a, b) = 2 ⇔ a ∩ b , ∅ and ∃z: s.c.c. on F disjoint from a ∪ b,
.
.
.
..
d(a, b) ≥ 3 ⇔ ( a ∩ b , ∅ and) @z: s.c.c. on F disjoint from a ∪ b
⇔ F \ (a ∪ b) consists of (open) disks
or once-punctured disks.
6 / 30
(Hempel) distance of Heegaard splittings
7 / 30
(Hempel) distance of Heegaard splittings
.
Compression-bodies
V : compression-body if it is obtained from S × [0, 1] (S: closed
orientable surface) by attaching “2-handles” to S × {0}.
.
..
∂-V
∂+V
.
..
.
.
V
7 / 30
(Hempel) distance of Heegaard splittings
.
Compression-bodies
V : compression-body if it is obtained from S × [0, 1] (S: closed
orientable surface) by attaching “2-handles” to S × {0}.
.
..
∂-V
∂+V
V
.
..
.
.
∂+ V := S × {1}, ∂− V := ∂V \ ∂+ V ,
the genus of ∂+ V is called the genus of the compression-body V .
7 / 30
(Hempel) distance of Heegaard splittings
.
Compression-bodies
V : compression-body if it is obtained from S × [0, 1] (S: closed
orientable surface) by attaching “2-handles” to S × {0}.
.
..
∂-V
∂+V
V
.
..
A compression-body V is called a handlebody if ∂− V = ∅.
.
.
∂+ V := S × {1}, ∂− V := ∂V \ ∂+ V ,
the genus of ∂+ V is called the genus of the compression-body V .
7 / 30
(Hempel) distance of Heegaard splittings
.
.
..
∂-V1
∂-V2
∂+V1
∂+V2
V1
g
.
.
(Generalized) Heegaard splittings
M : compact orientable 3-manifold
V1 ∪ F V2 : (genus- g) Heegaard splitting of M ( F: Heegaard surface)
if Vi : genus- g compression-body, V1 ∪ V2 = M and
.V1 ∩ V2 = ∂+ V1 = ∂+ V2 = F.
..
V2
g
8 / 30
(Hempel) distance of Heegaard splittings
.
.
..
∂-V2
∂+V1
∂+V2
V1
g
V2
g
.
Theorem (due to Moise ’52)
..
Every compact orientable 3-manifold admits a Heegaard splitting of some
genus.
.
..
.
.
.
∂-V1
.
.
(Generalized) Heegaard splittings
M : compact orientable 3-manifold
V1 ∪ F V2 : (genus- g) Heegaard splitting of M ( F: Heegaard surface)
if Vi : genus- g compression-body, V1 ∪ V2 = M and
.V1 ∩ V2 = ∂+ V1 = ∂+ V2 = F.
..
8 / 30
(Hempel) distance of Heegaard splittings
.
Distance of Heegaard sptlittings (Hempel ’01)
V1 ∪ F V2 : genus- g Heegaard splitting of M
C(F) : curve complex of F
D(Vi ) (i = 1, 2) : the maximal subcomplex of C(F) spanned by curves
(∈ C(F)) that bound disks in Vi
· · · disk complex of Vi
.
..
.
.
.
..
9 / 30
(Hempel) distance of Heegaard splittings
.
.
..
.
.
Distance of Heegaard sptlittings (Hempel ’01)
V1 ∪ F V2 : genus- g Heegaard splitting of M
C(F) : curve complex of F
D(Vi ) (i = 1, 2) : the maximal subcomplex of C(F) spanned by curves
(∈ C(F)) that bound disks in Vi
· · · disk complex of Vi
{
d(V
∪
V
)
:=
d
(D(V
),
D(V
))
1 F 2
C(F)
1
2 .
.
..
C(F)
D(V1 )
V2
d(L,S)=1
d(
D(V2 )
9 / 30
(Hempel) distance of Heegaard splittings
.
Known Results on Hempel distance
..
.
.
..
.
.
M = V1 ∪ F V2
10 / 30
(Hempel) distance of Heegaard splittings
.
Known Results on Hempel distance
..
.
M = V1 ∪ F V2
.
..
.
.
d(V1 ∪ F V2 ) = 0 ⇔ M: reducible or F:“stabilized”,
10 / 30
(Hempel) distance of Heegaard splittings
.
Known Results on Hempel distance
..
.
M = V1 ∪ F V2
d(V1 ∪ F V2 ) = 0 ⇔ M: reducible or F:“stabilized”,
(Hempel ’01, Hartshorn ’02)
∃S(⊂ M) : essential surface ⇒ d(V1 ∪ F V2 ) ≤ 2 g(S),
.
..
.
.
(Scharlemann-Tomova ’06)
∃F′ : “alternate” Heegaard surface of M ⇒ d(V1 ∪ F V2 ) ≤ 2g(F′ ),
10 / 30
(Hempel) distance of Heegaard splittings
.
Known Results on Hempel distance
..
.
M = V1 ∪ F V2
d(V1 ∪ F V2 ) = 0 ⇔ M: reducible or F:“stabilized”,
(Hempel ’01, Hartshorn ’02)
∃S(⊂ M) : essential surface ⇒ d(V1 ∪ F V2 ) ≤ 2 g(S),
(Scharlemann-Tomova ’06)
∃F′ : “alternate” Heegaard surface of M ⇒ d(V1 ∪ F V2 ) ≤ 2g(F′ ),
“Casson-Gordon’s rectangle condition” ⇒ d(V1 ∪ F V2 ) ≥ 2,
.
..
.
.
(Hempel ’01, Berge, Scharlemann ’12) gave sufficient conditions for
d(V1 ∪ F V2 ) ≥ 3,
10 / 30
(Hempel) distance of Heegaard splittings
.
Known Results on Hempel distance
..
.
M = V1 ∪ F V2
d(V1 ∪ F V2 ) = 0 ⇔ M: reducible or F:“stabilized”,
(Hempel ’01, Hartshorn ’02)
∃S(⊂ M) : essential surface ⇒ d(V1 ∪ F V2 ) ≤ 2 g(S),
(Scharlemann-Tomova ’06)
∃F′ : “alternate” Heegaard surface of M ⇒ d(V1 ∪ F V2 ) ≤ 2g(F′ ),
“Casson-Gordon’s rectangle condition” ⇒ d(V1 ∪ F V2 ) ≥ 2,
.
..
(Hempel ’01, Evans ’06, Minsky-Moriah-Schleimer ’07, Lustig-Moriah
’09, ...) gave Heegaard splittings with d(V1 ∪ F V2 ) ≥ n for ∀n.
.
.
(Hempel ’01, Berge, Scharlemann ’12) gave sufficient conditions for
d(V1 ∪ F V2 ) ≥ 3,
10 / 30
(Hempel) distance of Heegaard splittings
.
Theorem 1 (Ido-J.-Kobayashi)
.
.
.
..
For any integers n ≥ 2 and g ≥ 2,
∃V1 ∪ F V2 : genus- g Heegaard splitting (of a closed 3-manifold) with
.d(V1 ∪ F V2 ) = n.
..
11 / 30
(Hempel) distance of Heegaard splittings
.
.
..
.
.
.
Theorem 1 (Ido-J.-Kobayashi)
.
..
For any integers n ≥ 2 and g ≥ 2,
∃V1 ∪ F V2 : genus- g Heegaard splitting (of a closed 3-manifold) with
.d(V1 ∪ F V2 ) = n.
..
.
.
Remark
.
..
Examples of closed orientable 3-manifolds with genus- g Heegaard
splittings with n = 0 or 1 are known (∀(g, n) , (2, 1)).
11 / 30
(Hempel) distance of Heegaard splittings
.
.
..
Theorem 1 was proved independently by [Qiu-Zou-Guo], and also by
[Yoshizawa] in case n is even.
.
.
.
Theorem 1 (Ido-J.-Kobayashi)
.
..
For any integers n ≥ 2 and g ≥ 2,
∃V1 ∪ F V2 : genus- g Heegaard splitting (of a closed 3-manifold) with
.d(V1 ∪ F V2 ) = n.
..
.
.
Remark
.
..
Examples of closed orientable 3-manifolds with genus- g Heegaard
splittings with n = 0 or 1 are known (∀(g, n) , (2, 1)).
11 / 30
Proof of Theorem 1
.
Theorem 1 (Ido-J.-Kobayashi)
.
.
.
..
For any integers n ≥ 2 and g ≥ 2,
∃V1 ∪ F V2 : genus- g Heegaard splitting (of a closed 3-manifold) with
.d(V1 ∪ F V2 ) = n.
..
12 / 30
Proof of Theorem 1
.
Theorem 1 (Ido-J.-Kobayashi)
.
.
.
..
For any integers n ≥ 2 and g ≥ 2,
∃V1 ∪ F V2 : genus- g Heegaard splitting (of a closed 3-manifold) with
.d(V1 ∪ F V2 ) = n.
..
(Step 1) Construct a geodesic of length (n + 2) in C(F).
(Key tool : Masur-Minsky’s subsurface projection)
12 / 30
Proof of Theorem 1
.
Theorem 1 (Ido-J.-Kobayashi)
.
.
.
..
For any integers n ≥ 2 and g ≥ 2,
∃V1 ∪ F V2 : genus- g Heegaard splitting (of a closed 3-manifold) with
.d(V1 ∪ F V2 ) = n.
..
(Step 1) Construct a geodesic of length (n + 2) in C(F).
(Key tool : Masur-Minsky’s subsurface projection)
(Step 2) Glue two compression-bodies with “simple” disk complexes
(using the above geodesic).
12 / 30
Proof of Theorem 1
.
Theorem 1 (Ido-J.-Kobayashi)
V1
.
.
.
..
For any integers n ≥ 2 and g ≥ 2,
∃V1 ∪ F V2 : genus- g Heegaard splitting (of a closed 3-manifold) with
.d(V1 ∪ F V2 ) = n.
..
(Step 1) Construct a geodesic of length (n + 2) in C(F).
(Key tool : Masur-Minsky’s subsurface projection)
(Step 2) Glue two compression-bodies with “simple” disk complexes
(using the above geodesic).
(Step 3) Attach handlebodies in a way “complicated enough” to the
boundary of the manifold.
V2
12 / 30
Subsurface projection
F : surface, X : essential non-simple subsurface of F,
P(C (0) (X)) : the power set of C (0) (X).
13 / 30
Subsurface projection
F : surface, X : essential non-simple subsurface of F,
P(C (0) (X)) : the power set of C (0) (X).
.
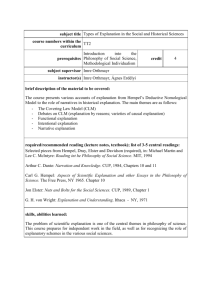
Subsurface projection π X : C (0) (F) → P(C (0) (X))
..
.
γ
F
X
γ X={a1,a2} πX(γ)={∂N(∂X a1),∂N(∂X a2)}
ignore
inessential
loops
γ
a1
a2
.
.
.
..
13 / 30
Subsurface projection
F : surface, X : essential non-simple subsurface of F,
P(C (0) (X)) : the power set of C (0) (X).
.
Subsurface projection π X : C (0) (F) → P(C (0) (X))
..
.
γ1
γ
F
γ2
X
πX(γ)={γ1 ,γ2 }
.
..
.
.
γ
γ X
14 / 30
Subsurface projection
π X : C (0) (F) → P(C (0) (X)) : subsurface projection
15 / 30
Subsurface projection
.
π X : C (0) (F) → P(C (0) (X)) : subsurface projection
.
Lemma 1 (Masur-Minsky ’00)
.
..
Let [a0 , a1 , a2 , . . . , a m] is a geodesic in C(F) such that each ai intersects
.X. Then diamC(X) (π X (a0 ) ∪ π X (a m))) ≤ 2m.
..
.
15 / 30
Subsurface projection
.
.
π X : C (0) (F) → P(C (0) (X)) : subsurface projection
.
Lemma 1 (Masur-Minsky ’00)
.
..
Let [a0 , a1 , a2 , . . . , a m] is a geodesic in C(F) such that each ai intersects
.X. Then diamC(X) (π X (a0 ) ∪ π X (a m))) ≤ 2m.
..
.
.
Lemma 2 (Li ’12)
.
..
Let V be a compression-body with ∂+ V = F. Assume that every essential
disk in V intersects ∂X and that V is not an I-bundle over X. Then
.diamC(X) (π X (D(V))) ≤ 12.
..
.
15 / 30
Step 1: Path of length n ( n: even)
16 / 30
Step 1: Path of length n ( n: even)
F : closed surface of (given) genus g(> 1)
α0 , α1 , α2 : essential s.c.c.s on F s.t.
α1
α0
α0 ∩ α2 =(1 point),
α1 : disjoint from α0 ∪ α2 .
α2
F
16 / 30
Step 1: Path of length n ( n: even)
F : closed surface of (given) genus g(> 1)
α0 , α1 , α2 : essential s.c.c.s on F s.t.
α1
α0
α0 ∩ α2 =(1 point),
α1 : disjoint from α0 ∪ α2 .
α2
F
X2 := Cl(F \ N(α2 ))
f2 : F → F homeomorphism s.t.
f2 (N(α2 )) = N(α2 ),
diamC(X2 ) (π X2 (α0 ) ∪ π X2 ( f2 (α0 ))) ≥ 2n.
16 / 30
Step 1: Path of length n ( n: even)
F : closed surface of (given) genus g(> 1)
α0 , α1 , α2 : essential s.c.c.s on F s.t.
α1
α0
α0 ∩ α2 =(1 point),
α2
α1 : disjoint from α0 ∪ α2 .
F
X2 := Cl(F \ N(α2 ))
f2 : F → F homeomorphism s.t.
f2 (N(α2 )) = N(α2 ),
diamC(X2 ) (π X2 (α0 ) ∪ π X2 ( f2 (α0 ))) ≥ 2n.
α3 := f2 (α1 ), α4 := f2 (α0 ).
f4
α0
α1
α2
α3
α4
5
α6
...
α n-1 αn
f2
16 / 30
Step 1: Path of length n ( n: even)
F : closed surface of (given) genus g(> 1)
α0 , α1 , α2 : essential s.c.c.s on F s.t.
α1
α0
α0 ∩ α2 =(1 point),
α2
α1 : disjoint from α0 ∪ α2 .
F
Xi := Cl(F \ N(αi )) (i = 2, 4, . . . , n − 2)
fi : F → F homeomorphism s.t.
fi (N(αi )) = N(αi ),
diamC(Xi ) (π Xi (α0 ) ∪ π Xi ( fi (αi−2 ))) ≥ 2n.
αi+1 := fi (αi−1 ), αi+2 := fi (αi−2 ).
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
17 / 30
Step 1: Path of length n ( n: even)
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
18 / 30
Step 1: Path of length n ( n: even)
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
.
.
.
.
Lemma 3
..
.dC(F) (α0 , α k ) = k for ∀k = 2, 4, . . . , n.
..
18 / 30
Step 1: Path of length n ( n: even)
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
.
.
.
.
Lemma 3
..
.dC(F) (α0 , α k ) = k for ∀k = 2, 4, . . . , n.
..
∵ Done if k = 2.
18 / 30
Step 1: Path of length n ( n: even)
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
.
.
.
.
Lemma 3
..
.dC(F) (α0 , α k ) = k for ∀k = 2, 4, . . . , n.
..
∵ Done if k = 2.
So we assume that k > 2 and that dC(F) (α0 , α k−2 ) = k − 2.
18 / 30
Step 1: Path of length n ( n: even)
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
.
.
Lemma 3
.
..
.dC(F) (α0 , α k ) = k for ∀k = 2, 4, . . . , n.
..
.
∵ Done if k = 2.
So we assume that k > 2 and that dC(F) (α0 , α k−2 ) = k − 2.
Assume that ∃ a path [β0 , β1 , . . . , β l ] s.t. β0 = α0 , β l = α k and l < k(≤ n)
18 / 30
Step 1: Path of length n ( n: even)
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
.
.
Lemma 3
.
..
.dC(F) (α0 , α k ) = k for ∀k = 2, 4, . . . , n.
..
.
∵ Done if k = 2.
So we assume that k > 2 and that dC(F) (α0 , α k−2 ) = k − 2.
Assume that ∃ a path [β0 , β1 , . . . , β l ] s.t. β0 = α0 , β l = α k and l < k(≤ n)
{ ∃ j s.t. β j = α k−2
(by “diamC(X k−2 ) (π X k−2 (α0 ) ∪ π X k−2 (α k ))) ≥ 2n” and Lemma 1)
18 / 30
Step 1: Path of length n ( n: even)
f4
α0
α1
α2
α3
α4
α5
α6
...
α n-1 αn
f2
.
.
Lemma 3
.
..
.dC(F) (α0 , α k ) = k for ∀k = 2, 4, . . . , n.
..
.
∵ Done if k = 2.
So we assume that k > 2 and that dC(F) (α0 , α k−2 ) = k − 2.
Assume that ∃ a path [β0 , β1 , . . . , β l ] s.t. β0 = α0 , β l = α k and l < k(≤ n)
{ ∃ j s.t. β j = α k−2
(by “diamC(X k−2 ) (π X k−2 (α0 ) ∪ π X k−2 (α k ))) ≥ 2n” and Lemma 1)
{ j ≥ k − 2 and l − j ≥ 2, a contradiction.
18 / 30
Extending geodesics
♣ Similarly, for any given two geodesics [a0 , a1 , . . . , a l ] and
[b0 , b1 , . . . , b m] in C(F) such that a l and b0 are non-separating on F, we
can find a self-homeomorphism h of F such that
diamC(F\al ) (π F\al (a0 ), π F\al ( f (b m))) > 2(l + m).
Then [a0 , a1 , . . . , a l = f (b0 ), f (b1 ), . . . , f (b m)] is a geodesic in C(F).
b0
a0
al
bm
19 / 30
Extending geodesics
♣ Similarly, for any given two geodesics [a0 , a1 , . . . , a l ] and
[b0 , b1 , . . . , b m] in C(F) such that a l and b0 are non-separating on F, we
can find a self-homeomorphism h of F such that
diamC(F\al ) (π F\al (a0 ), π F\al ( f (b m))) > 2(l + m).
Then [a0 , a1 , . . . , a l = f (b0 ), f (b1 ), . . . , f (b m)] is a geodesic in C(F).
b0
a0
al
bm
20 / 30
Extending geodesics
♣ Similarly, for any given two geodesics [a0 , a1 , . . . , a l ] and
[b0 , b1 , . . . , b m] in C(F) such that a l and b0 are non-separating on F, we
can find a self-homeomorphism h of F such that
diamC(F\al ) (π F\al (a0 ), π F\al ( f (b m))) > 2(l + m).
Then [a0 , a1 , . . . , a l = f (b0 ), f (b1 ), . . . , f (b m)] is a geodesic in C(F).
b0
a0
al
bm
21 / 30
Step 2: Heegaard splitting with distance n ( n: even)
22 / 30
Step 2: Heegaard splitting with distance n ( n: even)
For i = 1, 2,
Vi := F g,0 × I ∪ (a 2-handle along D0 )
i
D0i
Vi
22 / 30
Step 2: Heegaard splitting with distance n ( n: even)
For i = 1, 2,
Vi := F g,0 × I ∪ (a 2-handle along D0 )
i
D0i
Vi
.
Lemma 4
..
D0 is the only non-separating disk in Vi (up to isotopy),
.
i
∀ essential separating disk in Vi : disjoint from D0 .
i
.
.
.
..
22 / 30
Step 2: Heegaard splitting with distance n ( n: even)
For i = 1, 2,
Vi := F g,0 × I ∪ (a 2-handle along D0 )
i
D0i
Vi
.
Lemma 4
..
D0 is the only non-separating disk in Vi (up to isotopy),
.
∀ essential separating disk in Vi : disjoint from D0 .
i
.
..
.
Let [α0 , α1 , . . . , α n+2 ] be a geodesic (⊂ C(F)) obtained in Step 1, and
identify ∂+ Vi and F so that ∂ D0 = α0 and ∂ D0 = α n+2 .
1
2
By Lemmas 3 and 4, V1 ∪ F V2 is a Heegaard splitting with distance ≥ n.
D(V1)
α0
α1
α2 . . .
αn
.
i
αn+2
α n+1
D(V2)
22 / 30
Step 2: Heegaard splitting with distance n ( n: even)
On the other hand, we can find a loop α′ which bounds a separating disk
1
in V1 and disjoint from α0 ∪ α2 .
α0
D10
α2
V1
α1′
23 / 30
Step 2: Heegaard splitting with distance n ( n: even)
On the other hand, we can find a loop α′ which bounds a separating disk
1
in V1 and disjoint from α0 ∪ α2 .
α0
D10
α2
V1
α1′
Similarly, we can find a loop α′ which bounds a separating disk in V2
n+1
and disjoint from α n ∪ α n+2 .
23 / 30
Step 2: Heegaard splitting with distance n ( n: even)
On the other hand, we can find a loop α′ which bounds a separating disk
1
in V1 and disjoint from α0 ∪ α2 .
α0
D10
α2
V1
α1′
Similarly, we can find a loop α′ which bounds a separating disk in V2
n+1
and disjoint from α n ∪ α n+2 .
{ Hempel distance of V1 ∪ F V2 is exactly n.
D(V1)
α0
α1
α′1
α2 . . .
αn α′n+1 αn+2
α n+1
D(V2)
23 / 30
Step 2: Heegaard splitting with distance n ( n: even)
On the other hand, we can find a loop α′ which bounds a separating disk
1
in V1 and disjoint from α0 ∪ α2 .
α0
D10
α2
V1
α1′
Similarly, we can find a loop α′ which bounds a separating disk in V2
n+1
and disjoint from α n ∪ α n+2 .
{ Hempel distance of V1 ∪ F V2 is exactly n.
D(V1)
α0
α1
α′1
α2 . . .
αn α′n+1 αn+2
α n+1
D(V2)
24 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
25 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
∂-V1
D1
V1
V2
F2
F1
Let D1 be the essential separating disk in V1 with ∂ D1 = α′ , then D1 cuts
1
V1 into a solid torus V 1 and the other component V 2 ( ∂− V1 × I).
1
1
25 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
∂-V1
D1
V1
V2
F2
F1
Let D1 be the essential separating disk in V1 with ∂ D1 = α′ , then D1 cuts
1
V1 into a solid torus V 1 and the other component V 2 ( ∂− V1 × I).
1
1
Let Fi (i = 1, 2) be the subsurface ∂+ V i ∩ F of F(= ∂+ V1 ).
1
25 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
∂-V1
D1
V1
V2
F2
F1
Let D1 be the essential separating disk in V1 with ∂ D1 = α′ , then D1 cuts
1
V1 into a solid torus V 1 and the other component V 2 ( ∂− V1 × I).
1
1
Let Fi (i = 1, 2) be the subsurface ∂+ V i ∩ F of F(= ∂+ V1 ).
1
Let π Fi : C (0) (F) → PC (0) (Fi ) : subsurface projection, and
let P : C (0) (F2 ) → C (0) (F2 ∪ D1 ) → C (0) (∂− V1 ) : natural projection.
25 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
∂-V1
D1
V1
V2
F2
F1
Let D1 be the essential separating disk in V1 with ∂ D1 = α′ , then D1 cuts
1
V1 into a solid torus V 1 and the other component V 2 ( ∂− V1 × I).
1
1
Let Fi (i = 1, 2) be the subsurface ∂+ V i ∩ F of F(= ∂+ V1 ).
1
Let π Fi : C (0) (F) → PC (0) (Fi ) : subsurface projection, and
let P : C (0) (F2 ) → C (0) (F2 ∪ D1 ) → C (0) (∂− V1 ) : natural projection.
By Lemma 2 (when n ≥ 3),
diamC(Fi ) (π Fi (D(V2 ))) ≤ 12,
and hence
diamC(∂− V1 ) (Pπ F2 (D(V2 ))) ≤ 12. · · · (1)
25 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
Let H be a handlebody of genus (g − 1) and choose a homeomorphism
h : ∂H → ∂− V1 so that
dC(∂− V1 ) (Pπ F2 (D(V2 )), h∗ (D(H))) ≥ 2n. · · · (2)
26 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
Let H be a handlebody of genus (g − 1) and choose a homeomorphism
h : ∂H → ∂− V1 so that
dC(∂− V1 ) (Pπ F2 (D(V2 )), h∗ (D(H))) ≥ 2n. · · · (2)
(This follows from (1) since dC(∂H) (D(∂H)), h n(D(∂H)) → ∞ as n → ∞
for h : pseudo-Anosov [Hempel ’01].)
PπF2D(V2) C( ∂-V1 )
D(H)
≧2n
hnD(H)
26 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
Let H be a handlebody of genus (g − 1) and choose a homeomorphism
h : ∂H → ∂− V1 so that
dC(∂− V1 ) (Pπ F2 (D(V2 )), h∗ (D(H))) ≥ 2n. · · · (2)
(This follows from (1) since dC(∂H) (D(∂H)), h n(D(∂H)) → ∞ as n → ∞
for h : pseudo-Anosov [Hempel ’01].)
PπF2D(V2) C( ∂-V1 )
D(H)
≧2n
hnD(H)
Let V ∗ := V1 ∪ h H.
1
26 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
Replace the gluing homeomorphism between ∂+ V1 and ∂+ V2 with another
one which is different from the original one only on F1 and satisfies
dC(F1 ) (π F1 (D(V2 )), ∂ D01 ) ≥ 2n. · · · (3)
∂-V1
D10
F1
D1
F2
27 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
Replace the gluing homeomorphism between ∂+ V1 and ∂+ V2 with another
one which is different from the original one only on F1 and satisfies
dC(F1 ) (π F1 (D(V2 )), ∂ D01 ) ≥ 2n. · · · (3)
∂-V1
D10
F1
D1
F2
Note
C( F1 )
πF1D(V2)
PπF2D(V2)
≧2n
≧2n
C( ∂-V1 )
h*D(H)
0
∂D 1
27 / 30
.
..
Step 3: Attaching handlebodies ( n ≥ 3)
.
d(V1∗ ∪ F V2 ) = n.
.
.
.
Proposition
..
28 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
.
d(V ∗ ∪ V ) = n.
1 F 2
.
..
Proof. Assume on the contrary that dC(F) (D(V ∗ ), D(V2 )) < n.
.
.
.
Proposition
..
1
28 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
.
d(V ∗ ∪ V ) = n.
1 F 2
.
..
Proof. Assume on the contrary that dC(F) (D(V ∗ ), D(V2 )) < n.
1
Then ∃a ∈ D(V ∗ ) \ D(V1 ), ∃b ∈ D(V2 ) s.t. dC(F) (a, b) < n.
.
.
.
Proposition
..
1
28 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
.
d(V ∗ ∪ V ) = n.
1 F 2
.
..
.
Proof. Assume on the contrary that dC(F) (D(V ∗ ), D(V2 )) < n.
1
Then ∃a ∈ D(V ∗ ) \ D(V1 ), ∃b ∈ D(V2 ) s.t. dC(F) (a, b) < n.
1
For any geodesic [a0 , a1 , . . . , a m] connecting a and b, every ai intersects
∂ D1 (and hence F1 and F2 ).
.
.
Proposition
..
28 / 30
.
Proposition
..
Step 3: Attaching handlebodies ( n ≥ 3)
.
.
d(V ∗ ∪ V ) = n.
1 F 2
.
..
.
Proof. Assume on the contrary that dC(F) (D(V ∗ ), D(V2 )) < n.
1
Then ∃a ∈ D(V ∗ ) \ D(V1 ), ∃b ∈ D(V2 ) s.t. dC(F) (a, b) < n.
1
For any geodesic [a0 , a1 , . . . , a m] connecting a and b, every ai intersects
∂ D1 (and hence F1 and F2 ). By Lemma 1, we have
diamC(F1 ) (π F1 (a) ∪ π F1 (b)) < 2n, · · · (4)
diamC(∂− V1 ) (Pπ X (a) ∪ Pπ X (b)) < 2n. · · · (5)
C( F1 )
πF1D(V2)
πF1(b)
<2n
πF1(a)
PπF2D(V2)
PπF2(b)
≧2n
0
∂D 1
≧2n
C( ∂-V1 )
h*D(H)
<2n
PπF2(a)
28 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
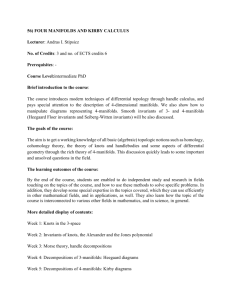
On the other hand, we can see by an “outermost disk argument” that
dC(F1 ) (π F1 (a), ∂ D01 ) = 0 or dC(∂− V1 ) (Pπ F2 (a), h∗ (D(H))) = 0.
πF1D(V2)
πF1(b)
C( F1 )
PπF2D(V2)
PπF2(b)
<2n
πF1(a)
≧2n
0
∂D 1
≧2n
C( ∂-V1 )
h*D(H)
<2n
PπF2(a)
29 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
On the other hand, we can see by an “outermost disk argument” that
dC(F1 ) (π F1 (a), ∂ D01 ) = 0 or dC(∂− V1 ) (Pπ F2 (a), h∗ (D(H))) = 0.
πF1D(V2)
πF1(b)
C( F1 )
PπF2D(V2)
PπF2(b)
<2n
πF1(a)
≧2n
0
∂D 1
≧2n
C( ∂-V1 )
h*D(H)
<2n
PπF2(a)
This together with the inequalities (4) and (5) implies
dC(F1 ) (π F1 (D(V2 )), ∂ D01 ) < 2n, or
dC(∂− V1 ) (Pπ F2 (D(V2 )), h∗ (D(H))) < 2n,
which contradicts the inequality (2) or (3).
29 / 30
Step 3: Attaching handlebodies ( n ≥ 3)
On the other hand, we can see by an “outermost disk argument” that
dC(F1 ) (π F1 (a), ∂ D01 ) = 0 or dC(∂− V1 ) (Pπ F2 (a), h∗ (D(H))) = 0.
C( F1 )
πF1D(V2)
πF1(b)
PπF2D(V2)
PπF2(b)
<2n
πF1(a)
≧2n
0
∂D 1
≧2n
C( ∂-V1 )
h*D(H)
<2n
PπF2(a)
This together with the inequalities (4) and (5) implies
dC(F1 ) (π F1 (D(V2 )), ∂ D01 ) < 2n, or
dC(∂− V1 ) (Pπ F2 (D(V2 )), h∗ (D(H))) < 2n,
which contradicts the inequality (2) or (3).
Similarly, we can fill ∂− V2 with a handlebody to obtain a Heegaard splitting
V ∗ ∪ F V ∗ with d(V ∗ ∪ F V ∗ ) = n, where each V ∗ is a handlebody.
1
2
1
2
i
29 / 30