Document 10968062

Study of Eclipsing Cataclysmic Variables
LX Serpentis and UX Ursae Majoris
An Honors Thesis (HONRS 499) by
Matthew Knote
Thesis Advisor
Dr. Ronald Kaitchuck
Ball State University
Muncie, Indiana
July 2012
Expected Date of Graduation
July 2012
S p Ct)/1
{n4f":5r ad
I ~/~
'D
189
. ~
/UJIZ
..
,,~
ABSTRACT
1
I studied the eclipsing cataclysmic variable systems LX Serpentis and UX Ursae Majoris to ascertain the inclination of the orbit and the radii of the white dwarf component and compare the results to theoretical predictions. A light curve was obtained via differential photometry, which was then fit to several parameters by the program Phoebe. A geometrical model was then used to estimate the sizes of the white dwarfs. The estimated sizes are significantly larger than predicted by theoretical models, while the inclinations of the systems appear reasonable.
INTRODUCTION
A cataclysmic variable (CV) system is a binary star system containing a main-sequence star and a white dwarf star in a small (~ 1 R
0 ) orbit. The gravity of the white dwarf - often considered the primary star - draws matter from the secondary into an accretion disk surrounding the white dwarf. This accretion disk is the brightest component of the system. In a system in which the orbital plane of the binary lies close to our line of sight, the two stars eclipse each other once every orbit, causing a periodic drop in apparent brightness. In an eclipsing cataclysmic variable system, the most prominent drop in apparent brightness occurs when the secondary star occults the accretion disk. By looking at the light curve of such a system, it is possible to determine the points at which the white dwarf is eclipsed, providing a way to estimate the size of the white dwarf.
LX Serpentis and UX Ursae Majoris are two such eclipsing cataclysmic binary systems.
I observed three eclipses of UX UMa and two eclipses of LX Ser over a two night period covering March 27-29, 2011, using the Southeastern Association for Research in Astronomy's
(SARA) 0.9 meter telescope at the Kitt Peak National Observatory. The data were then processed with IRAF and measurements to produce a light curve via the program AIP4Win .
Another program called Phoebe was used to estimate the inclination of the system by making a best fit model of the data. Using these results, I used a geometrical argument to estimate the radius of the white dwarf stars, which were compared to the radii predicted by theoretical models.
2
The LX Serpentis system consists of a white dwarf star of mass 0.41 Mo and a red dwarf companion of mass 0.36 Mo. They orbit each other with a separation of 7.86 X 10
8 m and an orbital period of 0.1579 days (Ritter & Kolb 1998). The UX Ursae Majoris system is composed of a white dwarf star of mass 0.47 Mo and a red dwarf companion also of mass 0.47 Mo. They orbit each other with a separation of9.70X 10
8 m and an orbital period of 0.1967 days (Baptista et al. 1995, Ritter 1990).
OBSERVATIONS AND ANALYSIS
The data were obtained by photometrically reducing images taken at Kitt Peak National
Observatory on the nights of March 27, 28, and 29, 2011. The telescope used was a 0.9 meter
Cassegrain and the images were taken by a CCD camera. The images were processed using
IRAF (Tody 1993), which uses dark, flat, and bias images taken on the night of observation to reduce errors caused by instrumental factors. The dark and bias images are subtracted from the images in the data set, which are then divided by the flat field images.
The in1ages were then run through the program AIP4 Win (Berry & Burnell 2006).
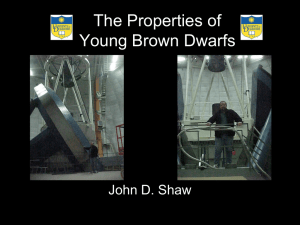
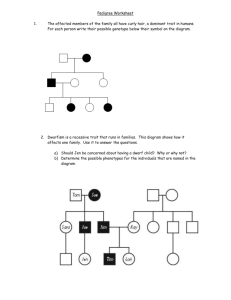
AIP4Win assigns a target area (e.g. a star) a value based on the intensity of the pixels contained in the area. These values are then compared to similar values assigned to two other stars that are known to have constant brightness, a process called differential photometry. This comparison is the basis for a generated light curve seen in the graphs below.
I then used the program Phoebe to estimate the inclination of the system. Phoebe is a program that accepts several parameters of a binary system, such as star temperature, system inclination, and size of the component stars, and produces a light curve based upon that information. It then adjusts the parameters to produce a least-squares fit on the data. Using reasonable estimates as my basis, I adjusted the parameters to best fit the light curve produced by
AIP4Win. I used the resultant inclination in my calculations.
In order to calculate the radius of the white dwarf, the four contact points (shown as blue vertical lines in the graphs) where the disk of the white dwarf just touches the disk of the secondary must be found. To assist in locating them, the derivative of the data was calculated.
This was done by using the equation:
3 dmn
= - - - - dt tn+l - t n-
1
Here, m is the differential magnitude, t is the Julian Date, and n is the data point the derivative is being calculated for. Using the derivative allows me to see sudden changes in the slope, which indicate the contact points of the white dwarf.
The radius of the white dwarf was approximated by using the equation:
RWd
=
IT X /J,.({J X a sin i
Here, (jJ is the phase angle of the system, a is the semi-major axis of the system components, and i is the inclination of the system with respect to our line of sight. The change in the phase angle is described by the equation:
/J,.({J
= "2
1
[(
({J2 ({Jl)
+
(({J4 ({J3)]
Here, each (jJ refers to one of the contact points, starting with (jJ1 as the leftmost contact point on the graph.
RESULTS
The light curves indicate a
/1(jJ of about 0.02 for the LX Serpentis system and about 0.015 for the UX Ursae Majoris system while Phoebe estimated the inclinations of the LX Ser system at 73° and the UX UMa system at 75°, giving a white dwarf radius of 7.08 x 10
7 m and 4.42 x
10
7 m, respectively. Theoretical models predict that a 0.40 Me:) white dwarf similar to the LX
Ser dwarf should have a radius of 1.08 x 10
7 m, while a 0.50 Me:) white dwarf sin1ilar to the UX
UMa dwarf should have a radius of 9.60 x 10
6 m (Chandrasekhar 1938).
Phoebe gives its own estimate for the primary component of the systen1, and it seems reasonable that this estimate is in fact for the accretion disk instead of the white dwarf. The estimated size of the accretion disk is 1.02 x 10
8 m for LX Ser and 1.55 x 10
8 m for UX UMa.
CONCLUSIONS
My estimates for the inclination of the systems seem reasonable, as do Phoebe's estimates of the size of the accretion disks. My estimates for the sizes of the LX Ser and UX
4
DMa white dwarfs are considerably larger than theory would predict. Theoretically, a white dwarf having a radius equivalent to either of my estimates would have a mass much less than
0.22 M0' the lowest such mass given by Chandrasekhar. In addition, Baptista et al. obtained a radius of 9.79 x 10
6 m for the DX DMa dwarf using data obtained from the Hubble Space
Telescope.
The discrepancy is partially due to the instrument used. A ground-based telescope must contend with atmospheric distortions that reduce the quality of the data. In addition, it is difficult to distinguish between the white dwarf and the accretion disk. In particular, the ilmer boundary of the accretion disk contributes to the change in slope, causing the contact points to appear further apart and thus causing an overestimate of the white dwarfs radius.
REFERENCES
Baptista, R., Home, K., Hilditch, R., Mason, K. 0., Drew, 1. E., 1995, ApJ, 448, 395
Berry, R., Burnell, J., 2006, The Handbook ofAstronomical Image Processing
Chandrasekhar, S., 1938, Stellar Structure, Chapter XI
Ritter, H., 1990, A&AS, 85, 1179
Ritter, H., Kolb, D., 1998, A&AS, 129,83
Tody, D., 1993, Astronomical Data Analysis Software and Systems II, p. 173
UX UMa Transit 1
-1.6
0.75 0.8 0 .
85
1 " - - - - - ' - - - - - - 1
-1.4
-1.2
~ -1
:I
.og -0.8 lID i
-0.6
~
-0.4 c
CI.I
~ -0.2
=: o
0
0 .
2
OA
0.6
•
....... .-.....
-
...............
~
-
Phase Angle
0 .
9 0.95
- - - - . - -
1.05
- - - '
1.1
- -
- ' - - -
,.t..&...t. .AI.
.......
..........
~,~
~
...."
:"" "\&ft4 .t.
--
~
-I""'"
"
~
.....
.~
.. ~~
.~
•
.
~:
~ ~
,.
..,
,.,,
.t..
........ ..
• Transit 1 Transit 1 Derivative
1.15
,
5
UX UMa Transits 2
&
3
-0.6 i
-0 .
4
"~
~
0 .
2
III
~
0
"o::l
~
0.2
CI.I
~
OA
0.6
-1
0 .
8
- -
0.85
-0.8
A.
-
~
.........
-
0 .
8
Phase Angle
0 .
9
- - ' -
,
......
0 .
95 1
-
L - . - - ' ' - r
,
....
It\Lr
-~
~
1.05 1.1
-
~---
1.15
-
1.2
- - - - - - - '
,. ,.
,.0
,.It
J. ~ .. -
~
.
.........
~ ...
I '
"
~
, .... ~
,~
'-...
~
............
'....
• Transit 2 • Transit 3 • Transit 2 Derivative Transit 3 Derivative
1.5
2
CIJ
."
~
2.5
'c
3 bO
III
:iE ii
'';:: c
CIJ
3 .
5
4
:u
~
4.5
5
5 .
5
6
0 .
8 0.85 0.9 0.95
LX SerTransits 1
&
2
Phase Angle
1.05 1.1 1.15
+ Transit 1 . T ranist 2 • Transit 1 Derivative . Transit 2 Derivative
1.2 1.25
. 1 . . . . . . . . - . - - - 1 . .
1.3
6
ACKNOWLEDGEMENTS
I would like to thank Dr. Ron Kaitchuck for his support in the research and production of this thesis. I could not have done this without him. I would also like to thank Garrison Turner for his help in learning the software I used in making this thesis, as well as his support throughout my time on the project. In addition, I would like to thank the Indiana Space Grant
Consortium for funding our projects; this would have been inlpossible without their support.
Finally, I would like to thank my parents, Jan and Steve Knote, for never giving up on me and giving me the impetus to see this project through.