Document 10952983
advertisement

Hindawi Publishing Corporation
Mathematical Problems in Engineering
Volume 2012, Article ID 717543, 12 pages
doi:10.1155/2012/717543
Research Article
Nonlinear Response of Vibrational Conveyers with
Nonideal Vibration Exciter:
Superharmonic and Subharmonic Resonance
H. Bayıroğlu,1 G. F. Alışverişçi,1 and G. Ünal2
1
2
Yıldız Technical University, 34349 Istanbul, Turkey
Yeditepe University, 34755 Istanbul, Turkey
Correspondence should be addressed to H. Bayıroğlu, hbayir@yildiz.edu.tr
Received 17 October 2011; Accepted 24 November 2011
Academic Editor: Swee Cheng Lim
Copyright q 2012 H. Bayıroğlu et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
Vibrational conveyers with a centrifugal vibration exciter transmit their load based on the jumping
method. Common unbalanced-mass driver oscillates the trough. The motion is strictly related to
the vibrational parameters. The transition over resonance of a vibratory system, excited by rotating
unbalances, is important in terms of the maximum vibrational amplitude produced and the power
demand on the drive for the crossover. The mechanical system is driven by the DC motor. In
this study, the working ranges of oscillating shaking conveyers with nonideal vibration exciter
have been analyzed analytically for superharmonic and subharmonic resonances by the method of
multiple scales and numerically. The analytical results obtained in this study agree well with the
numerical results.
1. Introduction
The load-carrying element of a horizontal shaking conveyer performs, as a rule, linear
or sometimes circular or elliptical symmetrical harmonic oscillations—with a sinusoidal
variation of exciting force. In vertical shaking conveyers, the load-carrying element performs
double harmonic oscillations: linear along the vertical axis and rotational around that axis
i.e., longitudinal and torsional oscillations. Conveyer drives with centrifugal vibration
exciters may have 1 a single unbalanced-mass, 2 two equal unbalancing masses, 3
a pendulum-type unbalanced-mass, 4 four unbalanced-masses in two shafts, 5 four
rotating unbalanced-masses for three principal modes of oscillation, that is, linear, elliptical,
and circular. To induce strictly oriented linear oscillations of the load-carrying element, the
conveyer drive should be arranged so that the line of excitation force passes through the
2
Mathematical Problems in Engineering
inertial centre of the entire oscillating system. Nonideal drives find application in suspended
and supported vibrational conveyers and feeders 1.
By the characteristics and adjustment of the elastic support elements oscillating
system, we can distinguish between shaking conveyers with a resonant, subresonant, and
superresonant system.
A practical difficulty with unbalanced-mass exciters, observed as early as 1904 by A
Sommerfeld, is that local instabilities may occur in operating speed of such devices.
Rocard 2, Mazert 3, Panovko, and I. I. Gubanova 4 have studied the problem of
the stability of the unbalanced-mass exciter.
The first detailed study on the nonideal vibrating systems is presented by Kononenko.
He obtained satisfactory results by the comparison of the experimental analysis and the
approximated method 5.
After this publication, the nonideal problem was presented by Evan-Ivanowski 6 or
Nayfeh and Mook 7. These authors showed that sometimes dynamical coupling between
energy sources and structural response that had not to be ignored in reel engineering
problems.
Theorical studies and computations of Ganapathy and Parameswaran have indicated
the beneficial effect of the “material load” during the starting and transition phase of an
unbalanced-mass-driven vibrating conveyor 8.
Bolla et al. analyzed through the multiple scales method a response of a simplified
nonideal and nonlinear vibrating system 9.
Götzendorfer in 10 presented a macromechanical model for the transport of granular
matter on linear and horizontal conveyors subject to linear, circular or elliptic oscillations and
compared it to experimental results 10.
2. The Governing Equations of the Motion
The equations of motion for the modified rocard system may be obtained by using Lagrange’s
equation
d ∂T
∂D ∂T ∂V
−
0,
dt ∂q̇i
∂q̇i ∂qi ∂qi
2.1
where T , the kinetic energy, is
T
2 1
2 1
1 Mẏ2 m ẏ θ̇e cos θ θ̇e sin θ
Imot θ̇2 ,
2
2
2
2.2
where e is the eccentricity of the mass m, m is the unbalanced-mass, M is the mass of the
trough and the conveyed material on the trough of the conveyor, θ is the angle of rotation of
the shafts carrying unbalanced-masses, Imot is the moment of inertia of the rotating parts in
the motor, V , the potential energy, is
V 1
1
k1 y2 k2 y4 mge1 sin θ,
2
4
2.3
Mathematical Problems in Engineering
3
where the constants k1 and k2 are the linear and nonlinear elastic coefficients, respectively, D,
the Rayleigh dissipation function, is
D
1 2 1 cẏ K ωs − θ̇ ,
2
2
2.4
and qi is the generalized coordinate. Applying Lagrange’s equation for the two coordinates
qi y and qi θ gives the differential equations of motion
Mÿ mÿ cẏ k1 y k2 y3 me θ̇2 sin θ − θ̈ cos θ ,
⎛
⎞
1 ∂K ⎜
2⎟
θ̇
−
ω
θ̈
me
ÿ
cos
θ
g
cos
θ
me
K
.
⎝Imot
⎠
s
2 ∂θ̇
2.5
Isys
Equation 2.5 can be rewritten as follows:
ÿ ω02 y ε −2μẏ − αy3 − eθ̈ cos θ κ θ̇2 sin θ ,
2.6
θ̈ ε −I cos θ ÿ g E θ̇ ,
2.7
where
m Me
,
Isys
k2
,
m
m ML θ̇
k1
m
2
ω0 ,
ε,
E θ̇ ,
mM
mM
mIsys
1 ∂K θ̇ − ωs K ,
L θ̇ 2 ∂θ̇
I
κ
me
,
mM
2μ c
,
m
α
2.8
where c is the damping coefficient of the vibrating conveyor, g is acceleration due to gravity,
Isys Im IM Imot is the total moment of inertia of all the rotating parts in the system, and
ωs is the synchronous angular speed of the induction motor 9. K is the instantaneous drive
torque available at the shafts. Note that E contains Lθ̇ that is the active torque generated by
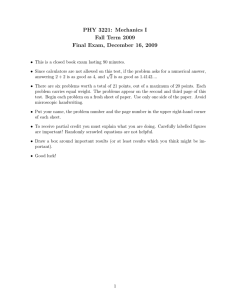
the electric circuit of the DC motor, shown in Figure 1.
3. Analytical Solution
Ideal system: if there is no coupling between motion of the rotor and vibrating system and
θ̇ constant θ ωt, θ̈ 0, 2.6 becomes
ÿ ω02 y ε −2μẏ − αy3 κω2 sin ωt.
On the right side of the equation, a function of time is present.
3.1
4
Mathematical Problems in Engineering
Figure 1: Vibrating model of the system.
Nonideal system:
θ̈ ε −I cos θ ÿ g E θ̇ ,
ÿ ωn2 y ε −2μẏ − αy3 − eθ̈ cos θ κ θ̇2 sin θ ,
3.2
where Eθ̇ Mm θ̇ − Hθ̇ is the difference between the torque generated by the motor
and the resistance torque. Function Eθ̇ u1 − u2 θ̇ is approximated by a straight line, where
u1 is a control parameter that can be changed according to the voltage, and u2 is a constant
parameter, characteristic for the model of the motor.
We will obtain an approximate analytical solution to 3.2 by using the multiple scales
method:
θt, ε ≈ θ0 T0 , T1 εθ1 T0 , T1 ε2 θ2 T0 , T1 ,
yt, ε ≈ y0 T0 , T1 εy1 T0 , T1 ε2 y2 T0 , T1 ,
Tn εn t,
n 0, 1, . . . ,
T0 t,
3.3
T1 εt
where the fast scale T0 t and slow scale T1 εt. The time derivatives transform according to
d
dT0 ∂
dT1 ∂
· · · D0 εD1 · · ·
dt
dt ∂T0
dt ∂T1
d2
D02 2εD0 D1 · · · ,
dt2
where Dn ∂/∂Tn , n 0, 1, . . .; then,
dθ
≈ D0 θ0 εD1 θ0 D0 θ1 · · · ,
dt
d2 θ
θ̈ 2 ≈ D02 θ0 ε 2D0 D1 θ0 D02 θ1 · · · ,
dt
θ̇ 3.4
Mathematical Problems in Engineering
5
dy
≈ D0 y0 ε D1 y0 D0 y1 · · · ,
dt
2
d y
ÿ 2 ≈ D02 y0 ε 2D0 D1 y0 D02 y1 · · · .
dt
ẏ 3.5
Substituting 3.5 into 3.2, we will obtain
D02 θ0 ε −2D0 D1 θ0 − D02 θ1 − I cos θ D02 y0 g E θ̇ ,
D02 y0 ε 2D0 D1 y0 D02 y1 ωn2 y0 εy1
3.6
3
ε −2μD0 y0 − α y0 − eD02 θ0 cos θ κD0 θ0 εD1 θ0 D0 θ1 2 sin θ ,
and equating coefficients of a like powers ε, we obtain
i for ε0
D02 θ0 0,
D02 y0 ω02 y0 κD0 θ0 2 sin θ,
3.7
ii for ε1
D02 θ1 −2D0 D1 θ0 − I cos θ D02 y0 g E θ̇ ,
3
D02 y1 ω02 y1 −2D0 D1 y0 − 2μD0 y0 − α y0 − eD02 θ0 cos θ
κ 2D0 θ0 D1 θ0 D0 θ1 sin θ.
3.8
3.9
The solution of 3.7 can be written as
θ0 BT0 σT1 ,
3.10
y0 Λ sinT0 Ω AT1 eiω0 T0 AT1 e−iω0 T0 ,
3.11
where
cosθ0 εθ1 cosθ0 Oε,
sinθ0 εθ1 sinθ0 Oε,
−κΩ2
.
Ω2 − ω02
Λ 3.12
6
Mathematical Problems in Engineering
Table 1: Vibrational conveyer parameters in SI units.
ε
0.05
α
μ
c
I
em
E1
E0
g
ω0
k1
k2
m
M
0.01
0.01
1
0.9
0.2
1.5
1.6
9.81
1
2 000
100
5
200
3.1. Subharmonic Resonances Ω ≈ 3ω0 (Table 1)
Near resonance:
D0 θ0 Ω,
3.13
Ω 3ω0 εσ.
3.14
θ0 ΩT0 3ω0 T0 σT1 .
3.15
aT1 iβT1 e
,
2
3.16
The solution of 3.13 can be written as
Taking
AT1 , T2 where a and β are real, and substituting it into 3.11, we will obtain
y0 1 −iT0 ω0 −iβT1 1
e
aT1 eiT0 ω0 iβT1 aT1 Λ sinT0 Ω,
2
2
1
−iT0 ω0 βT1 θ1 e
2 2
3
8 Ω − Ωω0
× I − 4Ω2 ω02 aT1 ×
1 e2iT0 ω0 βT1 Ω2 ω02 cosT0 Ω − 2i −1 e2iT0 ω0 βT1 Ωω0 sinT0 Ω
−2eiT0 ω0 βT1 Ω2 − ω02 cosT0 Ω −4g −κΩ2 Λω02 sinT0 Ω ,
y1 e−i3T0 Ω4T0 ω0 3βT1 × −8e3iβT1 Ω Ω3 3Ω2 ω0 − Ωω02 − 3ω03
× ieiT0 4 Ω3ω0 ω02 3αΛ3 8iΛμΩ Iκ2 Ω2 − IκΛω02 36Ω4 − 13Ω2 ω02 ω04
ieiT0 2 Ω3ω0 ω02 −3αΛ3 8iΛμΩ − Iκ2 Ω2 IκΛω02 36Ω4 − 13Ω2 ω02 ω04
4eiT0 Ω3ω0 gIκω02 9Ω4 − 10Ω2 ω02 ω04 4eiT0 5 Ω3ω0 gIκω02
Mathematical Problems in Engineering
× 9Ω4 − 10Ω2 ω02 ω04 8e3iT0 Ωω0 gIκ 36Ω6 − 49Ω4 ω02 14Ω2 ω04 − ω06
7
− ie3iT0 2 Ωω0 ω02 4Ω4 − 5Ω2 ω02 ω04 αΛ3 Iκ κΩ2 − Λω02
−ie3iT0 ω0 ω02 4Ω4 − 5Ω2 ω02 ω04 −αΛ3 Iκ −κΩ2 Λω02
2e2iβT1 ω02 36Ω5 108Ω4 ω02 − 39Ω2 ω03 Ωω04 3ω05
× eiT0 5 Ω2ω0 Ω ω0 2 2IκΩω02 3αΛ2 −Ω ω0 eiT0 Ω4ω0 2βT1 Ω ω0 2 2IκΩω02 3αΛ2 −Ω ω0 eiT0 Ω2ω0 Ω − ω0 2 2IκΩω02 − 3αΛ2 Ω ω0 ei5T0 Ω4T0 ω0 2βT1 ×Ω − ω0 2 2IκΩω02 − 3αΛ2 Ω ω0 aT1 24ieiT0 2 Ωω0 βT1 α
× ΛΩω02 − −1 − 2e2iT0 ω0 βT1 2e2iT0 Ωω0 βT1 e2iT0 Ω2ω0 2βT1 Ω
−1 6e2iT0 ω0 βT1 − 6e2iT0 Ωω0 βT1 e2iT0 Ω2ω0 2βT1 ω0
× 36Ω6 − 49Ω4 ω02 14Ω2 ω04 − ω06 aT1 2 e3iT0 Ω 1 e6iT0 ω0 βT1 αΩ
× Ω −
2
ω02
2 36Ω 108Ω ω0 − 13Ω
5
4
3
ω02
− 39Ω
2
ω02
Ωω04
3ω05
aT1 3
× cosT0 ω0 i sinT0 ω0 / 64 Ω 6Ω2 − 5 Ωω0 ω02
2
× −Ω2 ω0 ω03
× 6Ω3 23Ω2 ω0 16 Ωω02 3ω03 .
3.17
Secular terms will be eliminated from the particular solution of 3.8 if we choose A to be a
solution of
−2εσ E θ̇ .
3.18
In addition to the terms proportional to e±iω0 T0 or proportional to e±iΩ−2ω0 T0 there is
another term that produces a secular term in 3.9. We express Ω − 2ω0 T0 in terms of ω0 T0
according to
Ω − 2ω0 T0 ω0 T0 εσT0 ω0 T0 σT1 .
3.19
8
Mathematical Problems in Engineering
Table 2: Vibrational conveyer parameters in SI units.
ε
0.05
α
μ
c
I
em
E1
E0
g
ω0
k1
k2
m
M
0.01
0.01
1
0.9
0.2
1.5
1.6
9.81
10
200 000
100
5
200
3.2. Superharmonic Resonances Ω ≈ 1/3ω0 (Table 2)
We consider
3 Ω ω0 εσ.
3.20
In addition to the terms proportional to e±iω0 T0 in 3.9, there is another term that
produces a secular term in 3.9. This is −αΛ3 e±3iΩT0 . T0 eliminate the secular terms, we
express 3 ΩT0 in terms of ω0 T0 according to
3 ΩT0 ω0 εσT0 ω0 T0 σεT0 ω0 T0 σT1 .
3.21
Eliminating secular terms in equations, taking 3.16, and separating real and imaginary
parts, the system of equations solved it is as follows 11:
y0 θ1 1 −iT0 ω0 −iβT1 1
e
aT1 eiT0 ω0 iβT1 aT1 Λ sinT0 Ω,
2
2
1
e−iT0 ω0 βT1 2
8Ω3 − Ωω02 × I −4Ω2 ω02 aT1 ×
1 e2iT0 ω0 βT1 Ω2 ω02 cosT0 Ω − 2i −1 e2iT0 ω0 βT1 Ωω0 sinT0 Ω
−2eiT0 ω0 βT1 Ω2 − ω02 cosT0 Ω −4g −κΩ2 Λω02 sinT0 Ω ,
y1 e−i2T0 Ω5T0 ω0 3βT1 × −8e3iβT1 Ω Ω4 − 10Ω2 ω02 9ω04
× 4eiT0 4 Ω5ω0 gIκω02 Ω2 − ω02 − 4e5iT0 ω0 gIκω02 −Ω2 ω02
ieiT0 3 Ω5ω0 ω02 4Ω2 − ω02 3αΛ3 8iΛμΩ Iκ2 Ω2 − IκΛω02
eiT0 Ω5ω0 ω02 −4Ω2 ω02 3iαΛ3 8ΛμΩ iIκ2 Ω2 − iIκΛω02
8eiT0 2 Ω5ω0 gIκ 4Ω4 − 5Ω4 ω02 ω04 2e2iβT1 ω02 4Ω4 − 37Ω2 ω02 9ω0
Mathematical Problems in Engineering
× e4iT0 Ωω0 Ω ω0 2 2IκΩω02 3αΛ2 −Ω ω0 e2i3T0 ω0 βT1 Ω ω0 2
9
× 2IκΩω02 3αΛ2 −Ω ω0 e4iT0 ω0 Ω − ω0 2 2IκΩω02 − 3αΛ2 Ω ω0 e2i2T0 Ω3T0 ω0 βT1 Ω − ω0 2 2IκΩω02 − 3αΛ2 Ω ω0 aT1 − 24ieiβT1 αΛΩω02 4Ω4 − 5Ω2 ω02 ω04
× 2ei3T0 Ω5T0 ω0 2βT1 Ω2 − 9ω02 − 2eiT0 Ω5ω0 2βT1 Ω2 − 9ω02
− eiT0 Ω3ω0 Ω2 − 4 Ωω0 3ω02 ei3T0 Ω7T0 ω0 4βT1 Ω2 − 4 Ωω0 3ω02
e3iT0 Ωω0 Ω2 4 Ωω0 3ω02 − eiT0 Ω7ω0 4βT1 × Ω2 4 Ωω0 3ω02 aT1 2
2
e2iT0 Ωω0 e2iT0 Ω4ω0 3βT1 αΩ Ω2 − ω02
2
× 4Ω4 − 37Ω2 ω02 9ω04 aT1 3 / 64 −Ω2 ω0 ω03 4Ω5 −37Ω3 ω02 9 Ωω04 .
3.22
4. Stability Analysis
We analyzed in this system the stability a, γ in the equilibrium point, using 4.1, where F is
the Jacobian matrix of 4.2, and γsub 3βT1 −T1 σT1 , γsup βT1 −T1 σT1 . Stability of the
approximate solutions depends on the value of the eigenvalues of the Jacobian matrix F 12.
The solutions are unstable if the real part of the eigenvalues is positives Figures 2a1 and
2a2. Figure 2 shows the frequency-response curves for the subharmonic and superharmonic
resonance of the unbalanced vibratory conveyor:
3
αΛa2 cos γ ,
8ω0
3 2IκΩ2 ω02 3αΛ2 −Ω2 ω02
9
9
−
αa2 −
αΛa sin γ − σ,
2
2
8ω
8ω
4 Ω − ω0 ω0
0
0
asub −μa −
γsub
4.1
3 3
2
2
αΛ Iκ κΩ − Λω0 cos γ ,
−μa −
8ω0
3
2IκΩ2 ω02 3αΛ2 −Ω2 ω02
αΛ Iκ κΩ2 − Λω02 sin γ
3αa2
− σ,
−
8ω0
8ω0 a
4 Ω2 − ω02 ω0
F ∂a f1 , ∂γ f1 , ∂a f2 , ∂γ f2 , f1 a , f2 γ .
4.2
asub
γsub
10
Mathematical Problems in Engineering
Subharmonic resonance
Superharmonic resonance
7
9
6
8
5
7
4
a
a
10
6
3
5
2
4
1
3
1
1.5
2
0
−0.5
2.5
0.5
1
σ, (α = 0.8, μ = 0.05)
(a1)
(a2)
10
3
9
2.5
8
2
7
1.5
6
1
5
0.5
4
−1.5
0
σ, (α = 0.8, μ = 0.05)
a
a
0.5
−1
−0.5
0
0
0.5
2
0
4
6
8
1.5
10
κ(σ = 0.5, σ = 1, σ = 3)
κ(σ = 0.5, σ = 3, σ = 8)
σ = 0.5
σ=1
σ=3
σ = 0.5
σ=3
σ=8
(b2)
(b1)
10
2
8
1.5
a
a
6
4
1
2
0.5
0
0
10
20
30
40
50
−2
−1
σ, (μ = 0.1, μ = 1)
μ = 0.1
μ=1
0
2
3
σ, (μ = 0.2 , μ = 0.5)
μ = 0.2
μ = 0.5
(c1)
(c2)
Figure 2: Subharmonic resonance and superharmonic resonance. a Frequency-response curves with
stability, — stable, · · · unstable {a1 : a 2.78–10, σ 0.43258–2.62092 and a2 : a 2.73–7.21,
σ 0.6782–0.986448}, b effect of detuning parameter, and c effect of damping parameter.
11
1
1
0.8
0.8
Power spectrum
Power spectrum
Mathematical Problems in Engineering
0.6
0.4
0.2
0
0
1
2
3
4
5
0.6
0.4
0.2
0
6
0
1
2
a
5
6
Poincare map velocity-displacement
0.004
0.002
0.002
0
0
v
v
Velocity-displacement
−0.002
−0.002
−0.004
−0.004
0
0.005
−0.005
0
y
c
4
b
0.004
−0.005
3
0.005
y
d
Figure 3: Subharmonic resonance: a power spectrum and superharmonic resonance, b power spectrum,
c phase portrait, and d Poincaré sections.
5. Numerical Results
The numerical calculations of the vibrating system are performed with the help of the
software Mathematica 13, 14. We analyze the subharmonic resonance Ω ≈ 3ω0 and
superharmonic resonance 3 Ω ≈ ω0 . Figure 3 shows the power spectrum, phase portrait and
the Poincaré map for superharmonic resonance and Figure 3 shows the power spectrum for
superharmonic resonance.
6. Conclusions
The vibrating system is analyzed, analytically, and numerically for superharmonic and
subharmonic resonance by the method of multiple scales. Very often in the motion of the
system near resonance the jump phenomenon occurs. The frequency-response curves of the
subharmonic resonance consist of two branches; the left one is stable and the right one is
unstable saddle node bifurcation. The frequency-response curves of the superharmonic
resonance consist of three branches; the left one is stable, the middle one is unstable, and
the right one is stable pitchfork bifurcation. The stable motions of the oscillator are shown
12
Mathematical Problems in Engineering
with one peaks in the power spectrum for superharmonic resonance and with two peaks in
the power spectrum for subharmonic resonance. Both analytical and numerical results that
we have obtained are in good agreement. The system studied here exhibits chaotic behaviour
in case of strong nonlinearity. This will be reported in the forthcoming paper. Furthermore,
control methods in the passage through resonance await for future publication.
Acknowledgment
The authors greatly appreciate the comments of an anonymous referee.
References
1 J. M. Balthazar, D. T. Mook, H. I. Weber et al., “An overview on non-ideal vibrations,” Mechanica, vol.
38, no. 6, pp. 613–621, 2003.
2 Y. Rocard, General Dynamics of Vibrations, Ungar, New York, NY, USA, 3rd edition, 1960.
3 R. Mazert, Mécanique Vibratoire, C. Béranger, editor, Paris, France, 1955.
4 Y. G. Panovko and I. I. Gubanova, Stability and Oscillations of Elastic Systems, Consultans Bureau, New
York, NY, USA, 1965.
5 V. O. Kononenko, Vibrating Problems with a Limited Power Supply, Iliffe, London, UK, 1969.
6 R. M. Evan-Ivanowski, Resonance Oscillations in Mechanical Systems, Elsevier, Amsterdam, The Netherlands, 1976.
7 A. H. Nayfeh and D. T. Mook, Nonlinear Oscillations, John Wiley & Sons, New York, NY, USA, 1979.
8 S. Ganapathy and M. A. Parameswaran, “Transition over resonance and power requirements of an
unbalanced mass-driven vibratory system,” Mechanism and Machine Theory, vol. 21, no. 1, pp. 73–85,
1986.
9 M. R. Bolla, J. M. Balthazar, J. L. P. Felix, and D. T. Mook, “On an approximate analytical solution to
a nonlinear vibrating problem, excited by a nonideal motor,” Nonlinear Dynamics, vol. 50, no. 4, pp.
841–847, 2007.
10 A. Götzendorfer, Vibrated granular matter: transport, fluidization, and patterns, Ph.D. thesis, University
Bayreuth, 2007.
11 V. Piccirillo, J. M. Balthazar, and B. R. Pontes Jr., “Analytical study of the nonlinear behavior of a shape
memory oscillator: part II-resonance secondary,” Nonlinear Dynamics, vol. 60, no. 4, pp. 513–524, 2010.
12 J. Awrejcewicz and C. H. Lamarque, Bifurcation and Chaos in Nonsmooth Mechanical Systems, World
Scientific, River Edge, NJ, USA, 2003.
13 A. H. Nayfeh and C. M. Chin, Perturbation Methods with Mathematica, Dynamics Press, Virgina, va,
USA, 1999.
14 S. Lynch, Dynamical Systems with Applications Using Mathematica, Birkhäauser, Boston, Mass, USA,
2007.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014