Document 10951912
advertisement

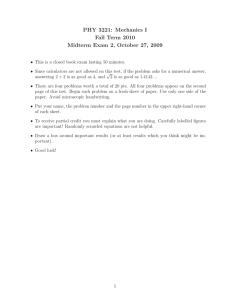
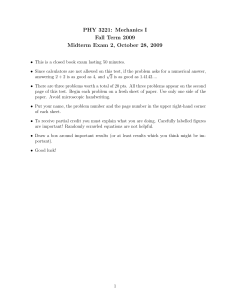
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2011, Article ID 635823, 21 pages doi:10.1155/2011/635823 Research Article Optimal Bounded Control for Stationary Response of Strongly Nonlinear Oscillators under Combined Harmonic and Wide-Band Noise Excitations Yongjun Wu,1 Changshui Feng,2 and Ronghua Huan3 1 Department of Engineering Mechanics, Shanghai Jiao Tong University, Shanghai 200240, China Institute of Mechatronic Engineering, Hangzhou Dianzi University, Hangzhou 310018, China 3 Department of Mechanics, Zhejiang University, Hangzhou 310027, China 2 Correspondence should be addressed to Yongjun Wu, yongjun.wu@yahoo.com Received 29 March 2011; Revised 8 July 2011; Accepted 25 July 2011 Academic Editor: Angelo Luongo Copyright q 2011 Yongjun Wu et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. We study the stochastic optimal bounded control for minimizing the stationary response of strongly nonlinear oscillators under combined harmonic and wide-band noise excitations. The stochastic averaging method and the dynamical programming principle are combined to obtain the fully averaged Itô stochastic differential equations which describe the original controlled strongly nonlinear system approximately. The stationary joint probability density of the amplitude and phase difference of the optimally controlled systems is obtained from solving the corresponding reduced Fokker-Planck-Kolmogorov FPK equation. An example is given to illustrate the proposed procedure, and the theoretical results are verified by Monte Carlo simulation. 1. Introduction The well-known tool to solve the problem of stochastic optimal control is the dynamical programming principle, which was proposed by Bellman 1. According to this principle, a stochastic optimal control problem may be transformed into the problem of finding a solution to the so-called Hamilton-Jacobi-Bellman HJB equation. However, in most cases, the HJB equation cannot be solved analytically 2, especially in the multidimensional case. A powerful technique to solve stochastic optimal control problems is to combine the socalled stochastic averaging method 3 with Bellman’s dynamic programming principle. The idea is to replace the original stochastic system by the averaged one and then to apply the dynamic programming principle to the averaged system. It has been justified that the optimal control for the averaged system is nearly optimal for the original system 4. This combination strategy has two notable advantages. Firstly, the dimension of the averaged 2 Mathematical Problems in Engineering system can be reduced remarkably, and the corresponding HJB equation is low-dimensional. Secondly, the diffusion matrix of the original stochastic system is usually singular, while the averaged one is usually nonsingular. This unique characteristic enables the HJB equation for the averaged system to have classical rather than viscous solution. In recent years, a notable nonlinear stochastic optimal control strategy has been proposed for the control of quasiHamiltonian systems under random excitations by Zhu based on the stochastic averaging method for quasi-Hamiltonian systems and the stochastic dynamical programming principle 3. Examples have shown that this strategy is very effective and efficient. In practice, the excitations of dynamical systems can be classified as either deterministic or random. The random excitation is often modeled as Gaussian white noise, wideband colored noise, or bounded noise. On the other hand, the magnitudes of the control forces are usually limited due to the saturation in actuators; that is, the control forces are bounded. The optimal bounded control of linear or nonlinear systems under random excitations has been studied by many researchers 5–8. In all these studies, the excitations of the systems are random excitations alone. However, many physical or mechanical systems are subjected to both random and deterministic harmonic excitations. For example, such combined excitations arise in the study of stochastic resonance 9 or uncoupled flapping motion of rotor blades of a helicopter in forward flight under the effect of atmospheric turbulence 10. Due to the existence of the deterministic harmonic excitation, the response of the stochastic system is not time homogeneous and the stationary behavior is not easy to capture. Stochastic averaging method is such a method that can approximate the original system by time-homogeneous stochastic processes. By using stochastic averaging method, many researchers have studied the linear or strongly nonlinear systems under combined harmonic and wide-band random excitations 11–16. On the other hand, optimal bounded control of a linear or nonlinear oscillator subject to combined harmonic and Gaussian white noise excitations has been studied 17–19. However, Gaussian white noise is an ideal model. In most cases, the random excitation should be modeled as wide-band colored noise. So far, little work has been done on the optimal bounded control of a strongly nonlinear oscillator subject to combined harmonic and wide-band noise excitations 20. In the present paper, a procedure for designing optimal bounded control to minimize the stationary response of a strongly nonlinear oscillator under combined harmonic and wide-band colored noise excitations is proposed. In Section 2, based on the stochastic averaging method, the equation of motion of a weakly controlled strongly nonlinear oscillator under combined harmonic and wide-band noise excitations is reduced to partially averaged Itô stochastic differential equations. In Section 3, a dynamical programming equation for the control problem of minimizing response of the system is formulated from the partially averaged Itô stochastic differential equations by applying the dynamical programming principle. The optimal control law is determined by the dynamical programming equation and the control constraint. In Section 4, the reduced FPK equation governing the stationary joint probability density of the amplitude and phase difference of the optimally controlled system is established. In Section 5, a nonlinearly damped Duffing oscillator under combined harmonic and wide-band noise excitations is taken as an example to illustrate the application of the proposed procedure. All theoretical results are verified by Monte Carlo simulation. 2. Partially Averaged Itô Stochastic Differential Equations Consider a weakly controlled strongly nonlinear oscillator subject to weak linear or nonlinear damping and weak external or parametric excitation by a combination of harmonic functions Mathematical Problems in Engineering 3 and wide-band colored noises. The equation of motion of the system has the following form Ẍ gX εf X, Ẋ, Ωt εu X, Ẋ ε1/2 hk X, Ẋ ξk t, k 1, 2, . . . , r, 2.1 where the term gX is stiffness, which is assumed as an arbitrary nonlinear function of X. ε is a small parameter; εfX, Ẋ, Ωt accounts for light damping and weak harmonic excitation with frequency Ω; ε1/2 hk ξk t represent weak external and/or parametric random excitations; ξk t are wide-band stationary and ergodic noises with zero mean and correlation functions Rkl τ or spectral densities Skl ω; εu denotes a weakly feedback control force. The repeated subscripts indicate summation. When u 0, 2.1 describes a large class of physical or structural systems. Under the conditions specified by Xu and Cheung 21, the solutions of system 2.1 can be expressed as the following form: Xt A cos Φt BA, Ẋt −AνA, Φ sin Φt, 2.2 where Φt μt Θt, dμ νA, Φ dt 2.3 2P A B − P A cos Φ B , A2 sin2 Φ P x x g y dy. 2.4 2.5 0 A, Φ, μ, Θ, and ν are all stochastic processes. P x is the potential energy of the system 2.1. The functions cos Φt and sin Φt are called generalized harmonic functions. Obviously νA, Φ is the instantaneous frequency of the system 2.1. When ε 0, 2.1 degenerates to the following nonlinear conservative oscillator: Ẍ gX 0. 2.6 The average frequency of the conservative oscillator 2.6 can be obtained by the following formula: ωA 2π 0 2π dΦ/νA, Φ . 2.7 Then the following approximate relation exists: Φt ≈ ωAt Θt. 2.8 4 Mathematical Problems in Engineering Treating 2.2 as generalized Van der Pol transformation from X, Ẋ to A, Θ , one can obtain the following equations for A and Θ: dA 1 2 εF1 A, Φ, Ωt εF1 A, Φ, u ε1/2 U1k A, Φξk t, dt 2.9 dΘ 1 2 εF2 A, Φ, Ωt εF2 A, Φ, u ε1/2 U2k A, Φξk t, dt where 1 F1 2 F1 1 F2 −A fA cos Φ B, −AνA, Φ sin Φ, ΩtνA, Φ sin Φ, gA B1 h −Au νA, Φ sin Φ, gA B1 h −1 fA cos Φ B, −AνA, Φ sin Φ, ΩtνA, Φcos Φ h, gA B1 h F2 −u νA, Φcos Φ h, gA B1 h U1k −A hk A cos Φ B, −AνA, Φ sin ΦνA, Φ sin Φ, gA B1 h U2k −1 hk A cos Φ B, −AνA, Φ sin ΦνA, Φcos Φ h, gA B1 h 2 h 2.10 dB g−A B gA B . dA g−A B − gA B According to the Stratonovich-Khasminskii limit theorem 22, 23, A and Θ converge weakly to 2-dimensional diffusive Markov processes in a time interval of ε−1 order as ε → 0, which can be represented by the following Itô stochastic differential equations: 2 dA ε S1 A, Φ, Ωt F1 A, Φ, u dt ε1/2 G1k A, ΦdBk t, 2 dΘ ε S2 A, Φ, Ωt F2 A, Φ, u dt ε1/2 G2k A, ΦdBk t, 2.11 where Bk t are independent unit Wiener processes, 1 Si F i 0 −∞ bij εGik Gjk ∂Uik ∂Uik · U R · U R dτ, τ τ | | 1l tτ kl 2l tτ kl ∂A t ∂Φ t ∞ −∞ Uik |t · Ujl tτ Rkl τ dτ, i, j 1, 2, k, l 1, . . . , r. 2.12 Mathematical Problems in Engineering 5 System 2.1 has harmonic excitation and two cases can be classified: resonant case and nonresonant case. In the nonresonant case, the harmonic excitation has no effect on the first approximation of the response. Thus, we are interested in the resonant case, namely, m Ω εσ, ωA n 2.13 where m and n are relatively prime positive small integers and εσ is a small detuning parameter. In this case, multiplying 2.13 by t and utilizing the approximate relation 2.8 yield Ωt m m Φ εσμ − Θ. n n 2.14 Introduce a new angle variable Γ such that Γ εσμ − m Θ n 2.15 which is a measure of the phase difference between the response and the harmonic excitation. Then 2.14 can be rewritten as Ωt m Φ Γ. n 2.16 Using the Itô differential formula, one can obtain the following Itô stochastic differential equations for A, Γ, and Φ: 2 dA ε S1 A, Φ, Γ F1 A, Φ, u dt ε1/2 G1k A, ΦdBk t, m m 2 S2 A, Φ, Γ F2 A, Φ, u dt − ε1/2 G2k A, ΦdBk t, dΓ ε σωA − n n 2 dΦ ωA ε S2 A, Φ, Γ F2 A, Φ, u dt ε1/2 G2k A, ΦdBk t. 2.17 Obviously, A and Γ are slowly varying processes, while Φ is a rapidly varying process. Averaging the drift and diffusion coefficients in 2.17 with respect to Φ yields the following partially averaged Itô stochastic differential equations: 1 2 dt ε1/2 σ 1r AdBr t, dA ε m1 A, Γ F1 A, Φ, u Φ m 2 1 F2 A, Φ, u dΓ ε m2 A, Γ − dt ε1/2 σ 2r AdBr t, Φ n 2.18 6 Mathematical Problems in Engineering where 1 m1 S1 A, Φ, ΓΦ , 1 m2 σωA − m S2 A, Φ, ΓΦ , n b11 A εσ 1r σ 1r b11 A, ΦΦ , m2 b22 A, ΦΦ , n2 m b12 A b21 A εσ 1r σ 2r b12 A, ΦΦ , n 2π 1 •dΦ. •Φ 2π 0 b22 A εσ 2r σ 2r 2.19 Herein, •Φ denotes the averaging with respect to Φ from 0 to 2π · bij are diffusion coefficients. Note that there are two procedures of averaging in this section. One is stochastic averaging, and the other is deterministic time averaging. The procedures for obtaining Si 1 and bij in 2.12 are called stochastic averaging. The procedures for obtaining mi and bij are called deterministic time averaging. To complete averaging and obtain the explicit 1 expressions of Si and bij , the functions Fi and Uik in 2.12 are expanded into Fourier series with respect to Φ and the approximate relation 2.8 is used. 3. Dynamical Programming Equation and Optimal Control Law For mechanical or structural systems, At is the response amplitude and Γt is the phase difference between the response and the harmonic excitation. They represent the averaged state of system 2.1. Usually, only the response amplitude is concerned, so it is meaningful to control At in a semi-infinite or finite time interval. Consider the ergodic control problem of system 2.18 in a semi-infinite time interval with the following performance index: 1 J lim T →∞T T fAtdt. 3.1 0 Herein, f is a cost function. Based on the stochastic dynamical programming principle 24, the following simplified dynamical programming equation can be established from the first equation of 2.18: η min fA u 1 m1 1 d2 V , b11 dA 2 dA2 dV 2 F1 Φ 3.2 where V A is called value function; minu∈U • denotes the minimum value of • with respect to u; η is optimal performance index; u ∈ U indicates the control constraint. Mathematical Problems in Engineering 7 The optimal control law can be determined from minimizing the right-hand side of 3.2 with respect to u under control constraint. Suppose that the control constraint is of the form |uA, Φ| ≤ u0 , 3.3 where u0 is a positive constant representing the maximum control force. The control u enters the performance index 3.2 only through the term 2 F1 dV u dV − AνA, Φ sin Φ . Φ dA gA B1 h Φ dA 3.4 This expression attains its minimum value for u ±u0 , depending on the sign of the coefficient of u in 3.4. So the optimal control is u∗ u0 sgn AνA, Φ sin Φ dV · , gA B1 h dA 3.5 where sgn denotes sign function. It is reasonable to assume that the cost function f is a monotonously increasing function of At because the controller must do more work to suppress larger amplitudes At. Then dV A/dA is positive. Under the specified conditions 21, gA B and 1 h are both positive. Equation 3.5 is reduced to u∗ −u0 sgn−AνA, Φ sin Φ −u0 sgn Ẋt . 3.6 Equation 3.6 implies that the optimal control is a bang-bang control. u∗ has a constant magnitude u0 . It is in the opposite direction of Ẋt and changes its direction at Ẋt 0. For the optimal bounded control of system 2.18 in a finite time interval, the following performance index is taken: JE t f , fAtdt χ A tf 3.7 0 where tf is the final control time and χ is the final cost function. E• denotes the expectation operator. The following simplified dynamical programming equation can be established from the first equation of 2.18: ∂V 1 ∂2 V ∂V 1 2 , −min fA m1 F1 b11 u Φ ∂A ∂t 2 ∂A2 3.8 where V V A, t is the value function. Equation 3.8 is subject to the following final time condition: V A, tf χ A tf . 3.9 8 Mathematical Problems in Engineering It is obvious that the same optimal control law as that in 3.6 can be derived if the control constraint is of the form of 3.3. Note that the optimal control for the averaged system 2.18 is nearly optimal for the original system 2.1. For simplicity, here it is called optimal control for both original and averaged systems. 4. Stationary Response of Optimally Controlled System 2 Inserting u∗ from 3.6 into 2.18 to replace u and averaging Fi , the following fully averaged Itô stochastic differential equations for A and Γ can be obtained: dA εm1 A, Γdt ε1/2 σ 1k AdBk t, 4.1 dΓ εm2 A, Γdt ε1/2 σ 2k AdBk t, where m1 A, Γ m2 A, Γ 1 m1 1 m2 −u∗ AνA, Φ sin Φ gA B1 h , Φ m u∗ νA, Φcos Φ h . n gA B1 h Φ 4.2 The reduced FPK equation for the optimally controlled system is of the following form 0− ∂ 1 ∂2 1 ∂2 ∂ ∂2 m1 p − m2 p b11 p b12 p b22 p , 2 2 ∂a ∂γ 2 ∂a ∂a∂γ 2 ∂γ 4.3 where p pa, γ is the stationary joint probability density of the amplitude A and the phase difference Γ. Since p is a periodic function of γ, it satisfies the following periodic boundary condition with respect to γ: p a, γ p a, γ 2π . 4.4 The boundary condition with respect to a 0 is p finite at a 0 4.5 which implies that a 0 is a reflecting boundary. The other boundary condition is p, ∂p −→ 0 ∂a as a −→ ∞. 4.6 Mathematical Problems in Engineering 9 In addition to the boundary conditions, the stationary joint probability density pa, γ satisfies the following normalization condition: 2π ∞ 0 p a, γ da dγ 1. 4.7 0 Usually, the partial differential equation 4.3 can be solved only numerically. 5. Example To illustrate the proposed strategy in the previous sections, take the following controlled nonlinearly damped Duffing oscillator as an example. Duffing oscillator is a typical model in nonlinear analysis. The equation of motion of the system is of the form Ẍ β1 β2 X 2 Ẋ ω02 X αX 3 E cos Ωt ξ1 t Xξ2 t u, 5.1 where β1 , β2 , ω0 , α, E, and Ω are positive constants; u is the feedback control with the constraint defined by 3.3; ξk t k 1, 2 are independent stationary and ergodic wideband noises with zero mean and rational spectral densities Si ω 1 Di , π ω2 ωi2 i 1, 2. 5.2 ξi t can be regarded as the output of the following first-order linear filter: ξ̇i ωi ξi Wi t, i 1, 2, 5.3 where Wi t are Gaussian white noises in the sense of Stratonovich with intensities 2Di . Note that the maximum value of Si ω is Di /πωi2 . It is assumed that β1 , Di /πωi2 , and E are all small. For the system 5.1, the instantaneous frequency defined by 2.4 has the following form: νA, Φ ω02 3αA2 4 1/2 1 λ cos 2Φ , 5.4 αA2 λ 2 . 4 ω0 3αA2 /4 νA, Φ can be approximated by the following finite sum with a relative error less than 0.03%: νA, Φ b0 A b2 A cos 2Φ b4 A cos 4Φ b6 A cos 6Φ, 5.5 10 Mathematical Problems in Engineering where b0 A b2 A b4 A b6 A ω02 3αA2 4 ω02 3αA2 4 ω02 3αA2 4 ω02 3αA2 4 1/2 λ2 1− 16 1/2 , λ 3λ3 2 64 1/2 λ2 − 16 1/2 λ3 64 , 5.6 , . Then the averaged frequency ωA of the system 5.1 can be approximated by b0 A. In the case of primary external resonance, Ω 1 εσ. ωA 5.7 Introduce the new angel variable defined by 2.15, and complete the procedures shown in Sections 2–4 we obtain the following fully averaged Itô stochastic differential equations for A and Γ: b11 AdB1 t, dΓ m2 A, Γdt b22 AdB2 t, dA m1 A, Γdt 5.8 where mi and bii i 1, 2 are drift and diffusion coefficients, respectively. mi and bii are given in the appendix. The stationary joint probability density pa, γ of the optimally controlled system 5.1 is governed by the following reduced FPK equation: 0− 1 ∂2 ∂ 1 ∂2 ∂ p p . m1 p − m2 p b b 11 22 ∂a ∂γ 2 ∂a2 2 ∂γ 2 5.9 Solving the FPK equation 5.9 by finite difference method under the conditions 4.4– 4.7, the stationary joint probability density of the amplitude and the phase difference of the optimally controlled system 5.1 can be obtained. Furthermore, the stationary mean amplitude of the optimally controlled system 5.1 can be obtained as follows: Ea ∞ 2π 0 0 ap a, γ da dγ. 5.10 Mathematical Problems in Engineering 11 2.5 2 1.5 1 ξ1 (t) 0.5 0 −0.5 −1 −1.5 −2 −2.5 0 50 100 150 200 t 250 300 350 400 Figure 1: Sample function of wide-band noise ξ1 t · D1 10, ω1 30. 0.1 0.05 u 0 −0.05 −0.1 −0.15 0 20 40 60 80 100 120 140 160 180 200 t Figure 2: Sample function of the control force u, u0 0.1. To check the accuracy of the proposed method, Monte Carlo digital simulation of the original system 5.1 is performed. The sample functions of independent wide-band noise ξi t were generated by inputting Gaussian white noises to the linear filter 5.3. The response of system 5.1 was obtained numerically by using the fourth-order Runge-Kutta method with time step 0.02. The long-time solution after 1500,000 steps was regarded as the stationary ergodic response. 100 samples are used. For every sample, the amplitude A and angle variable Γ are calculated from step 1500,001 to step 2000000 to obtain the statistical probability density of pa, γ. Figures 1 and 2 show the typical sample function of wideband noise ξ1 t and control force u, respectively. Figure 3 shows pa, γ of the optimal controlled system 5.1. It is seen that the theoretical result agrees very well with that from digital simulation. Figures 4a and 4b show the sample functions of displacement and velocity of the system 5.1, respectively. It is obvious that the bounded control can reduce the displacement and velocity. Also, the amplitude of the original system 5.1 is reduced by control, which is verified by Figure 5. Mathematical Problems in Engineering 2 1.6 1.2 0.8 0.4 0 p(a, γ) 2 1.6 1.2 0.8 0.4 0 2 1.5 1 a 2 0.5 3 4 5 p(a, γ) 12 6 γ 1 0 0 a 1.6 1.2 0.8 0.4 0 2 1.6 1.2 0.8 0.4 0 p(a, γ) p(a, γ) 2 2 1.5 a 1 2 4 3 γ 5 6 1 0.5 0 0 b 0.8 2.5 0.7 0.6 0.5 1.5 p(γ) p(a) 2 1 0.3 0.2 0.5 0 0.4 0.1 0 0.5 1 c a 1.5 2 2.5 0 0 1 2 3 γ 4 5 6 d Figure 3: Stationary joint probability density pa, γ of the optimally controlled system 5.1 in primary external resonance case. ω0 1.0, Ω 1.1, α 1.0, E 0.3, βi 0.05, ωi 30, D1 10, D2 5, u0 0.1 i 1, 2. a Theoretical result; b Monte Carlo simulation of the original system 5.1; c stationary marginal probability density pa; d stationary marginal probability density pγ. — theoretical results; • results from Monte Carlo simulation. Note that the system 5.1 is strongly nonlinear. Increasing the nonlinearity coefficients β1 or α in 5.1, one can see that the agreement between theoretical results and Monte Carlo digital simulation is still acceptable see Figures 6 and 7. This demonstrates that the proposed method is powerful to deal with strongly nonlinear problems, even though the nonlinearity is extremely strong. Mathematical Problems in Engineering 13 2 1.5 1 0.5 0 X −0.5 −1 −1.5 −2 30,000 30,100 30,200 t 30,300 30,400 30,300 30,400 a 4 3 2 1 Ẋ 0 −1 −2 −3 −4 30,000 30,100 30,200 t b Figure 4: Sample functions of displacement and velocity of the system 5.1, u0 0.4. Other parameters are the same as those in Figure 3. Red line: with control; blue line: without control. 0.9 α=1 0.8 0.7 E[a] 0.6 0.5 0.4 α=3 0.3 0.2 0.1 0 0.05 0.1 0.15 0.2 u0 Figure 5: Mean amplitude of the response of the optimally controlled system 5.1 in primary external resonance. The parameters are the same as those in Figure 3 except that u0 is a variable. — theoretical results; • results from Monte Carlo simulation. 14 Mathematical Problems in Engineering 7 β2 = 100 6 p(a) 5 4 β2 = 6 3 2 β2 = 0.1 1 0 0 0.5 1 1.5 2 2.5 a Figure 6: Stationary marginal probability density pa of the optimally controlled system 5.1 in primary external resonance case. Other parameters are the same as those in Figure 3. — theoretical results; • results from Monte Carlo simulation. 7 6 α = 100 p(a) 5 α = 15 4 3 α=5 2 1 0 0 0.2 0.4 0.6 0.8 1 a Figure 7: Stationary marginal probability density pa of the optimally controlled system 5.1 in primary external resonance case. Other parameters are the same as those in Figure 3. — theoretical results; • results from Monte Carlo simulation. 6. Conclusions In the present paper, a combination procedure of the stochastic averaging method and Bellman’s dynamic programming for designing the optimal bounded control to minimize the response of strongly nonlinear systems under combined harmonic and wide-band noise excitations has been proposed. The procedure consists of applying the stochastic averaging method for weakly controlled strongly nonlinear systems under combined harmonic and wide-band noise excitations, establishing the dynamical programming equation for the control problem of minimizing the response based on the partially averaged Itô stochastic differential equations and the dynamical programming principle, determining the optimal control from the dynamical programming equation and the control constraint without solving the dynamical programming equation. Then the stationary joint probability density Mathematical Problems in Engineering 15 and mean amplitude of the optimally controlled averaged system are obtained from solving the reduced FPK equation associated with the fully averaged Itô stochastic differential equations. A nonlinearly damped Duffing oscillator with hardening stiffness has been taken as an example to illustrate the application of the proposed procedure. The comparison between the theoretical results and those from Monte Carlo simulation shows that the proposed procedure works quite well even though the nonlinearity is extremely strong. The results show that the response amplitude of the system can be reduced remarkably by the feedback control. The advantages of the proposed method are obvious. Note that; in the example, the wide-band noise is generated by a first-order linear filter. In principle, one could apply the T stochastic dynamical programming method to the extended system X, Ẋ, ξ1 , ξ2 to study the optimal control problem. However, the corresponding HJB equation is 5-dimensional or 4 dimensional. The corresponding reduced FPK equation is 4 dimensional, which is very difficult to solve. After stochastic averaging, the original system is represented by two-dimensional time-homogeneous diffusion Markov processes of amplitude and phase difference with nondegenerate diffusion matrix. The dynamical programming equation derived from the averaged equations is two dimensional or one dimensional. The corresponding reduced FPK equation is two dimensional, which is easy to solve. The other advantage of the proposed procedure is that it is not necessary to solve the dynamical programming equation for obtaining the optimal control law. Furthermore, the proposed method can be extended to multi-degrees-of-freedom MDOF systems easily. This will be our future work. Appendix The drift coefficients in 5.8 are as follows: m1 H 1 A F 10 A, Γ 2u0 −105b0 A 35b2 A 7b4 A 3b6 A , 105π ω02 αA2 m2 H 2 A Ω − b0 A F 10 A, Γ E cos Γ2b0 A b2 A , 2 4A αA ω02 E sin Γ2b0 A − b2 A 2 4 αA ω02 A β1 16ω02 10αA2 A2 β2 4ω02 3αA2 − , 2 32 αA ω02 H 1 A m11 m12 m13 m14 , H 2 A m21 m22 m23 m24 , m11 m111 S1 ωA m113 S1 3ωA m115 S1 5ωA m117 S1 7ωA, m13 m131 S1 ωA m133 S1 3ωA m135 S1 5ωA m137 S1 7ωA, m12 m122 S2 2ωA m124 S2 4ωA m126 S2 6ωA m128 S2 8ωA, 16 Mathematical Problems in Engineering m14 m142 S2 2ωA m144 S2 4ωA m146 S2 6ωA m148 S2 8ωA, m21 m211 I1 ωA m213 I1 3ωA m215 I1 5ωA m217 I1 7ωA, m23 m231 I1 ωA m233 I1 3ωA m235 I1 5ωA m237 I1 7ωA, m22 m222 I2 2ωA m224 I2 4ωA m226 I2 6ωA m228 I2 8ωA, m24 m242 I2 2ωA m244 I2 4ωA m246 I2 6ωA m248 I2 8ωA, Ii ω ω Di 2 ωi ω ωi2 i 1, 2, m111 πb2 A − 2b0 A 2αA2b0 A − b2 A A2 α ω02 db2 A/dA − 2db0 A/dA × , 3 8 A2 α ω02 m113 πb2 A − b4 A 2αAb4 A − b2 A A2 α ω02 db2 A/dA − db4 A/dA , × 3 8 A2 α ω02 m115 πb4 A − b6 A 2αAb6 A − b4 A A2 α ω02 db4 A/dA − db6 A/dA , × 3 8 A2 α ω02 m117 πb6 A −2αAb6 A A2 α ω02 db6 A/dA , 3 8 A2 α ω02 m122 πA2b0 A − b4 A 2b0 A−b4 A A2 α − ω02 − A A2 α ω02 2db0 A/dA − db4 A/dA × , 3 32 A2 α ω02 m124 πAb2 A − b6 A b6 A−b2 A A2 α−ω02 A A2 αω02 db2 A/dA−db6 A/dA × , 3 32 A2 α ω02 m126 πAb4 A b4 A A2 α − ω02 A A2 α ω02 db4 A/dA , 3 32 A2 α ω02 m128 πAb6 A b6 A A2 α − ω02 A A2 α ω02 db6 A/dA , 3 32 A2 α ω02 Mathematical Problems in Engineering −π b22 A − 4b02 A m131 2 , 8A A2 α ω02 m133 −3π b42 A − b22 A 2 , 8A A2 α ω02 m135 −5π b62 A − b42 A 2 , 8A A2 α ω02 7πb2 A m137 6 2 , 8A A2 α ω02 m142 πA2b0 A − b4 A2b0 A 2b2 A b4 A , 2 16 A2 α ω02 m144 πAb2 A − b6 Ab2 A 2b4 A b6 A , 2 8 A2 α ω02 m146 3πAb4 Ab4 A 2b6 A , 2 16 A2 α ω02 πAb62 A m148 2 , 4 A2 α ω02 2b0 A b2 A2 m211 2 , 8A2 αA2 ω02 3b2 A b4 A2 m213 2 , 8A2 αA2 ω02 5b4 A b6 A2 m215 2 , 8A2 αA2 ω02 7b6 A2 m217 2 , 8A2 αA2 ω02 m222 2b0 A 2b2 A b4 A2 , 2 16 αA2 ω02 m224 b2 A 2b4 A b6 A2 , 2 8 αA2 ω02 17 18 Mathematical Problems in Engineering 3b4 A 2b6 A2 m226 2 , 16 αA2 ω02 b6 A2 m228 2 , 4 αA2 ω02 m231 2b0 A − b2 A −b2 A2b0 A 3A2 αω02 A αA2 ω02 2db0 A/dA db2 A/dA , × 3 8A2 αA2 ω02 m233 b2 A − b4 A −b2 A b4 A 3A2 α ω02 A αA2 ω02 db2 A/dA db4 A/dA , × 3 8A2 αA2 ω02 b4 A − b6 A m235 3 8A2 αA2 ω02 −b4 A b6 A 3A2 α ω02 A αA2 ω02 db4 A/dA db6 A/dA × , 3 8A2 αA2 ω02 m237 b6 A −b6 A 3A2 α ω02 A αA2 ω02 db6 A/dA , 3 8A2 αA2 ω02 m242 2db A 2db A db A 0 2 4 −2Aα2b0 A 2b2 A b4 A A2 α ω02 dA dA dA A2b0 A − b4 A × 3 , 32 αA2 ω02 m244 db A 2db A db A 2 4 6 −2Aαb2 A 2b4 A b6 A A2 α ω02 dA dA dA Ab2 A − b6 A × 3 , 32 αA2 ω02 m246 Ab4 A −2Aαb4 A 2b6 A A2 α ω02 db4 A/dA 2db6 A/dA , × 3 32 αA2 ω02 m248 Ab6 A −2Aαb6 A A2 α ω02 db6 A/dA . 3 32 αA2 ω02 A.1 Mathematical Problems in Engineering The diffusion coefficients in 5.8 are as follows: b11 b111 b112 , b22 b221 b222 , bij 0, i/ j, b111 b1111 S1 ωA b1113 S1 3ωA b1115 S1 5ωA b1117 S1 7ωA, b221 b2211 S1 ωA b2213 S1 3ωA b2215 S1 5ωA b2217 S1 7ωA, b112 b1122 S2 2ωA b1124 S2 4ωA b1126 S2 6ωA b1128 S2 8ωA, b222 b2220 S2 0 b2222 S2 2ωA b2224 S2 4ωA b2226 S2 6ωA b2228 S2 8ωA, b1111 πb2 A − 2b0 A2 2 , 4 αA2 ω02 b1113 πb2 A − b4 A2 2 , 4 αA2 ω02 b1115 πb4 A − b6 A2 2 , 4 αA2 ω02 πb62 A b1117 2 , 4 αA2 ω02 b1122 πA2 b4 A − 2b0 A2 2 , 16 αA2 ω02 b1124 πA2 b2 A − b6 A2 2 , 16 αA2 ω02 πA2 b42 A b1126 2 , 16 αA2 ω02 πA2 b62 A b1128 2 , 16 αA2 ω02 π2b0 A b2 A2 b2211 2 , 4A2 αA2 ω02 πb2 A b4 A2 b2213 2 , 4A2 αA2 ω02 19 20 Mathematical Problems in Engineering πb4 A b6 A2 b2215 2 , 4A2 αA2 ω02 πb62 A b2217 2 , 4A2 αA2 ω02 b2220 π2b0 A b2 A2 2 , 8 αA2 ω02 b2222 π2b0 A 2b2 A b4 A2 , 2 16 αA2 ω02 b2224 πb2 A 2b4 A b6 A2 , 2 16 αA2 ω02 b2226 πb4 A 2b6 A2 2 , 16 αA2 ω02 πb2 A b2228 6 2 . 16 αA2 ω02 A.2 Acknowledgments The work reported in this paper was supported by the National Natural Science Foundation of China under Grant nos. 10802030, 10902096 and Specialized Research Fund for Doctoral Program of Higher Education of China under Grant no. 200802511005. References 1 R. Bellman, Dynamic Programming, Princeton University Press, Princeton, NJ, USA, 1957. 2 C. S. Huang, S. Wang, and K. L. Teo, “Solving Hamilton-Jacobi-Bellman equations by a modified method of characteristics,” Nonlinear Analysis, Theory, Methods and Applications, vol. 40, no. 1, pp. 279– 293, 2000. 3 W. Q. Zhu, “Nonlinear stochastic dynamics and control in Hamiltonian formulation,” Applied Mechanics Reviews, vol. 59, no. 1–6, pp. 230–247, 2006. 4 H. J. Kushner and W. Runggaldier, “Nearly optimal state feedback control for stochastic systems with wideband noise disturbances,” SIAM Journal on Control and Optimization, vol. 25, no. 2, pp. 298–315, 1987. 5 M. F. Dimentberg, D. V. Iourtchenko, and A. S. Bratus, “Optimal bounded control of steady-state random vibrations,” Probabilistic Engineering Mechanics, vol. 15, no. 4, pp. 381–386, 2000. 6 J. H. Park and K. W. Min, “Bounded nonlinear stochastic control based on the probability distribution for the sdof oscillator,” Journal of Sound and Vibration, vol. 281, no. 1-2, pp. 141–153, 2005. 7 W. Q. Zhu and M. L. Deng, “Optimal bounded control for minimizing the response of quasi-integrable Hamiltonian systems,” International Journal of Non-Linear Mechanics, vol. 39, no. 9, pp. 1535–1546, 2004. 8 M. Deng and W. Zhu, “Feedback minimization of first-passage failure of quasi integrable Hamiltonian systems,” Acta Mechanica Sinica/Lixue Xuebao, vol. 23, no. 4, pp. 437–444, 2007. Mathematical Problems in Engineering 21 9 L. Gammaitoni, P. Hänggi, P. Jung, and F. Marchesoni, “Stochastic resonance,” Reviews of Modern Physics, vol. 70, no. 1, pp. 223–287, 1998. 10 N. Sri Namachchivaya, “Almost sure stability of dynamical systems under combined harmonic and stochastic excitations,” Journal of Sound and Vibration, vol. 151, no. 1, pp. 77–90, 1991. 11 G. O. Cai and Y. K. Lin, “Nonlinearly damped systems under simultaneous broad-band and harmonic excitations,” Nonlinear Dynamics, vol. 6, no. 2, pp. 163–177, 1994. 12 Z. L. Huang and W. Q. Zhu, “Exact stationary solutions of averaged equations of stochastically and harmonically excited mdof quasi-linear systems with internal and/or external resonances,” Journal of Sound and Vibration, vol. 204, no. 2, pp. 249–258, 1997. 13 Z. L. Huang, W. Q. Zhu, and Y. Suzuki, “Stochastic averaging of strongly non-linear oscillators under combined harmonic and white-noise excitations,” Journal of Sound and Vibration, vol. 238, no. 2, pp. 233–256, 2000. 14 W. Q. Zhu and Y. J. Wu, “First-passage time of Duffing oscillator under combined harmonic and white-noise excitations,” Nonlinear Dynamics, vol. 32, no. 3, pp. 291–305, 2003. 15 Z. L. Huang and W. Q. Zhu, “Stochastic averaging of quasi-integrable Hamiltonian systems under combined harmonic and white noise excitations,” International Journal of Non-Linear Mechanics, vol. 39, no. 9, pp. 1421–1434, 2004. 16 Y. J. Wu and W. Q. Zhu, “Stochastic averaging of strongly nonlinear oscillators under combined harmonic and wide-band noise excitations,” ASME Journal of Vibration and Acoustics, vol. 130, no. 5, Article ID 051004, 2008. 17 D. V. Iourtchenko, “Solution to a class of stochastic LQ problems with bounded control,” Automatica, vol. 45, no. 6, pp. 1439–1442, 2009. 18 W. Q. Zhu and Y. J. Wu, “Optimal bounded control of first-passage failure of strongly non-linear oscillators under combined harmonic and white-noise excitations,” Journal of Sound and Vibration, vol. 271, no. 1-2, pp. 83–101, 2004. 19 W. Q. Zhu and Y. J. Wu, “Optimal bounded control of harmonically and stochastically excited strongly nonlinear oscillators,” Probabilistic Engineering Mechanics, vol. 20, no. 1, pp. 1–9, 2005. 20 Y. J. Wu and R. H. Huan, “First-passage failure minimization of stochastic Duffing-Rayleigh-Mathieu system,” Mechanics Research Communications, vol. 35, no. 7, pp. 447–453, 2008. 21 Z. Xu and Y. K. Cheung, “Averaging method using generalized harmonic functions for strongly nonlinear oscillators,” Journal of Sound and Vibration, vol. 174, no. 4, pp. 563–576, 1994. 22 R. Z. Khasminskii, “A limit theorem for solution of differential equations with random right hand sides,” Theory of Probability and Its Application, vol. 11, no. 3, pp. 390–405, 1966. 23 R. L. Stratonovich, Topics in the Theory of Random Noise, vol. 1, Gordon and Breach, New York, NY, USA, 1963. 24 H. J. Kushner, “Optimality conditions for the average cost per unit time problem with a diffusion model,” SIAM Journal on Control and Optimization, vol. 16, no. 2, pp. 330–346, 1978. Advances in Operations Research Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Advances in Decision Sciences Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Mathematical Problems in Engineering Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Journal of Algebra Hindawi Publishing Corporation http://www.hindawi.com Probability and Statistics Volume 2014 The Scientific World Journal Hindawi Publishing Corporation http://www.hindawi.com Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 International Journal of Differential Equations Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Volume 2014 Submit your manuscripts at http://www.hindawi.com International Journal of Advances in Combinatorics Hindawi Publishing Corporation http://www.hindawi.com Mathematical Physics Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Journal of Complex Analysis Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 International Journal of Mathematics and Mathematical Sciences Journal of Hindawi Publishing Corporation http://www.hindawi.com Stochastic Analysis Abstract and Applied Analysis Hindawi Publishing Corporation http://www.hindawi.com Hindawi Publishing Corporation http://www.hindawi.com International Journal of Mathematics Volume 2014 Volume 2014 Discrete Dynamics in Nature and Society Volume 2014 Volume 2014 Journal of Journal of Discrete Mathematics Journal of Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Applied Mathematics Journal of Function Spaces Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Optimization Hindawi Publishing Corporation http://www.hindawi.com Volume 2014 Hindawi Publishing Corporation http://www.hindawi.com Volume 2014