Research Article The Probability of a Confidence Interval Based on
advertisement

Hindawi Publishing Corporation
Journal of Applied Mathematics
Volume 2013, Article ID 131424, 4 pages
http://dx.doi.org/10.1155/2013/131424
Research Article
The Probability of a Confidence Interval Based on
Minimal Estimates of the Mean and the Standard Deviation
Louis M. Houston
The Louisiana Accelerator Center, The University of Louisiana at Lafayette, LA 70504-4210, USA
Correspondence should be addressed to Louis M. Houston; houston@louisiana.edu
Received 22 January 2013; Revised 9 May 2013; Accepted 11 May 2013
Academic Editor: Jin L. Kuang
Copyright © 2013 Louis M. Houston. This is an open access article distributed under the Creative Commons Attribution License,
which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Using two measurements, we produce an estimate of the mean and the sample standard deviation. We construct a confidence
interval with these parameters and compute the probability of the confidence interval by using the cumulative distribution function
and averaging over the parameters. The probability is in the form of an integral that we compare to a computer simulation.
1. Introduction
A confidence interval is an interval in which a measurement
falls with a given probability [1]. This paper addresses the
question of defining the probability of a confidence interval
that can be constructed when only a minimal number of
measurements are known.
The problem has a couple of significant applications. In
geophysics, time-lapse 3D seismic monitoring is used to
monitor oil and gas reservoirs before and after production.
Because of the high cost of 3D seismic monitoring, a minimal-effort time-lapse 3D seismic monitoring approach was
proposed by Houston and Kinsland [2]. This approach proposes a minimal measurement interval based on preliminary
measurements. It implies successively smaller seismic surveys
as monitoring continues and knowledge of the behavior of the
reservoir grows. The success of the minimal-effort method
is based on the probability that the reservoir is detected by
a seismic survey. The minimal-effort method is based on a
minimal number of measurements, which connects it to the
topic of this paper.
Another significant application of a confidence interval
based on a minimal number of measurements is the problem
of cancer treatment based on the irradiation of a tumor
[3]. The purpose of irradiation is to destroy the tumor, but
targeting the tumor can be problematic because tumors often
exhibit small random motions within the body. Because of
random tumor motion, the result of radiation treatment
often includes the destruction of healthy tissue. Clearly, it is
beneficial that cancer radiation treatment incorporates minimal intervals. The success of the cancer treatment is based
on the probability that the tumor is irradiated while using
a minimal irradiation interval. This success hinges on the
ability of the radiation treatment to incorporate preliminary
measurements that are often minimal. It is upon this basis
that the cancer treatment problem connects to the topic of
this paper.
In this paper, we construct a confidence interval based on
minimal estimates of the mean and the standard deviation.
Explicitly, we use two measurements to specify an interval
that contains a subsequent measurement with a given probability. The mathematical effort includes the derivation of a
specific probability for the confidence interval. The probability is computed using the cumulative distribution function,
and this probability is averaged over both the estimate of the
mean and the sample standard deviation to yield a specific
value. The results are compared to a computer simulation that
estimates the probability based on frequency.
2. Probability Based on the Cumulative
Distribution Function
The cumulative distribution function [4] is given as
𝐹 (𝑥; 𝜇, 𝜎2 ) =
𝑥
2
2
1
∫ 𝑒−(𝑡−𝜇) /2𝜎 𝑑𝑡,
√2𝜋𝜎 −∞
(1)
2
Journal of Applied Mathematics
where 𝑥 is a measurement, 𝜇 is the mean, and 𝜎 is the standard deviation. Let V = (𝑡 − 𝜇)/√2𝜎. So, 𝑑V = 𝑑𝑡/√2𝜎, and
(1) becomes
𝐹 (𝑥; 𝜇, 𝜎2 ) =
=
So we have
𝑃(
1 (𝑥−𝜇)/√2𝜎 −V2
𝑒 𝑑V
∫
√𝜋 −∞
1 0 −V2
1 (𝑥−𝜇)/√2𝜎 −V2
𝑒 𝑑V (2)
∫ 𝑒 𝑑V +
∫
√𝜋 −∞
√𝜋 0
𝑥−𝜇
1 1
),
= + erf (
√2𝜎
2 2
(𝑥 + 𝑥2 )
(𝑥1 + 𝑥2 )
𝑥 + 𝑥2
𝑥 + 𝑥2
≤𝑥≤ 1
)
− 𝑛 1
+ 𝑛 1
√2
√2
2
2
=
((𝑥1 + 𝑥2 ) /2) + 𝑛 (𝑥1 − 𝑥2 /√2) − 𝜇
1
)
erf (
2
𝜎√2
+
𝑛 (𝑥1 − 𝑥2 /√2) + 𝜇 − ((𝑥1 + 𝑥2 ) /2)
1
).
erf (
2
𝜎√2
(9)
where erf is the error function [5]. We know that the cumulative distribution function designates probability as
𝐹 (𝑥; 𝜇, 𝜎2 ) = 𝑃 (𝑋 ≤ 𝑥) .
(3)
This equation can be simplified. Let 𝑦 = 𝑥1 + 𝑥2 and 𝑧 =
𝑥1 − 𝑥2 . Then, (9) becomes
Therefore, we can write
𝑃 (𝑥 − 𝑛𝑠 ≤ 𝑥 ≤ 𝑥 + 𝑛𝑠) = 𝐹 (𝑥 + 𝑛𝑠; 𝜇, 𝜎2 )
𝑃(
− 𝐹 (𝑥 − 𝑛𝑠; 𝜇, 𝜎2 ) ,
(4)
𝑦
𝑦
|𝑧|
|𝑧|
≤𝑥≤ +𝑛 )
−𝑛
√2
√2
2
2
=
where 𝑥 is the estimate of the mean given as
𝑥=
1 𝑁
∑𝑥
𝑁 𝑖=1 𝑖
+
(5)
and 𝑠 is the sample standard deviation given as
𝑠=√
=
1 𝑁
2
∑(𝑥 − 𝑥) .
𝑁 − 1 𝑖=1 𝑖
(6)
=
𝑥 + 𝑛𝑠 − 𝜇
1
)
erf (
2
𝜎√2
+
𝑛𝑠 + 𝜇 − 𝑥
1
).
erf (
2
𝜎√2
𝑠 = √ (𝑥1 −
𝑥1 + 𝑥2
,
2
2
2
2𝑥 − 𝑥1 − 𝑥2
2𝑥 − 𝑥1 − 𝑥2
= √( 1
) +( 2
)
2
2
2
2
(𝑥 − 𝑥2 )
(𝑥 − 𝑥1 )
=√ 1
+ 2
4
4
𝑥 − 𝑥2
.
= 1
√2
1
𝑛 |𝑧| (𝑦 − 2𝜇)
).
erf (
−
2
2𝜎
2𝜎√2
For simplicity, we have 𝑃 ≡ 𝑃((𝑦/2)−𝑛(|𝑧|/√2) ≤ 𝑥 ≤ (𝑦/2)+
𝑛(|𝑧|/√2)). The expectation with respect to 𝑦 can be written
as
(𝑥1 + 𝑥2 )
(𝑥 + 𝑥2 )
) + (𝑥2 − 1
)
2
2
2
𝑦
𝜇
1
𝑛 |𝑧|
−
)
erf (
+
2
2𝜎
𝜎√2 2𝜎√2
3. The Probability Averaged over
the Estimate of the Mean
Let 𝑁 = 2. This implies that
𝑥=
(10)
(𝑦 − 2𝜇) 𝑛 |𝑧|
1
+
erf (
)
2
2𝜎
2𝜎√2
+
(7)
𝑛 (|𝑧| /√2) + 𝜇 − (𝑦/2)
1
)
erf (
2
𝜎√2
𝑦
𝜇
1
𝑛 |𝑧|
+
)
erf (
−
2
2𝜎
2𝜎√2
𝜎√2
+
This allows us to write
𝑃 (𝑥 − 𝑛𝑠 ≤ 𝑥 ≤ 𝑥 + 𝑛𝑠) =
(𝑦/2) + 𝑛 (|𝑧| /√2) − 𝜇
1
)
erf (
2
𝜎√2
2
𝐸𝑦 (𝑃) =
(8)
1
2𝜎√𝜋
∞
(𝑦 − 2𝜇) 𝑛 |𝑧|
1
+
[ erf (
)
2
2𝜎
−∞
2𝜎√2
×∫
1
𝑛 |𝑧| (𝑦 − 2𝜇)
)]
+ erf (
−
2
2𝜎
2𝜎√2
2
× 𝑒−(𝑦−2𝜇)/4𝜎 𝑑𝑦,
(11)
Journal of Applied Mathematics
3
where we have used the fact that the standard deviation of 𝑦
is √2𝜎 because
var (𝑋1 + 𝑋2 ) = var (𝑋1 ) + var (𝑋2 ) ,
𝜎𝑋 = √var (𝑋);
(12)
see [6].
Let 𝑢 = (𝑦 − 2𝜇)/2𝜎, so that 𝑑𝑢 = 𝑑𝑦/2𝜎. Equation (11)
becomes
𝐸𝑦 (𝑃)
=
𝑔=
2
𝑎
𝑎
1 ∞
+ 𝑏) − erf (
)] 𝑒−𝑎 𝑑𝑎. (20)
∫ [erf (
√𝜋 −∞
√𝑚
√𝑚
Since
lim erf (
𝑚→0
𝑎
𝑎
) = lim erf (
+ 𝑏) = sgn (𝑎) ,
𝑚→0
√𝑚
√𝑚
(21)
we have the following.
Condition 3. Consider
∞
𝑛 |𝑧|
1
1
𝑢
1
𝑛 |𝑧|
𝑢
+
)]
) + erf (
−
∫ [ erf (
√𝜋 −∞ 2
√2
√2
2𝜎
2
2𝜎
2
× 𝑒−𝑢 𝑑𝑢
=
Therefore, (19) can be added to 𝑔 to obtain
1 ∞
𝑛 |𝑧| −𝑢2
𝑢
+
) 𝑒 𝑑𝑢.
∫ erf (
√𝜋 −∞
√2
2𝜎
lim 𝑔 = 0.
𝑚→0
Based on Conditions 1, 2, and 3, 𝑔 must have the following
form:
𝑔 = erf (𝑏
(13)
2
1 ∞
1
).
∫ erf (𝑎 + 1) 𝑒−𝑎 𝑑𝑎 = erf (
√𝜋 −∞
√1 + 𝑐
∞
(14)
(15)
For 𝑁 = 200 and Δ𝑎 = 0.1, we find
2
1 𝑁
∑ erf (𝑎 + 1) 𝑒−𝑎 Δ𝑎 = 0.6827.
√𝜋 𝑖=−𝑁
Now, let us determine the following integral:
∞
𝑎
𝑠 = ∫ erf (
+ 𝑏) 𝑑𝑎,
√𝑚
−∞
𝑠 = √𝑚 ∫
∞
−∞
erf (
𝑠 = √𝑚 ∫
∞
−∞
𝑑𝑎
𝑎
,
+ 𝑏)
√𝑚
√𝑚
(16)
erf (
1
) = 0.6827
√1 + 𝑐
(27)
or
where V = (𝑎/√𝑚) + 𝑏 and 𝑑V = 𝑑𝑎/√𝑚. Using the known
integral of the error function, we find that
𝑠 = √𝑚[(
(26)
Consequently,
erf (V) 𝑑V,
𝑠 = √𝑚[V erf(V) +
(24)
2
2
1 ∞
1 𝑁
∑ erf (𝑎 + 1) 𝑒−𝑎 Δ𝑎.
∫ erf (𝑎 + 1) 𝑒−𝑎 𝑑𝑎 ≈
√𝜋 −∞
√𝜋 𝑖=−𝑁
(25)
Condition 1. Consider
lim 𝑔 = erf (𝑏) .
(23)
Based on (24), we can numerically determine 𝑐 as
We will find three conditions on 𝑔 that determine its structure. First, the following limit is clear from (14).
𝑚→∞
√𝑚
),
√𝑚 + 𝑐
where 𝑐 > 0. Equations (14) and (23) suggest that we can write
At this point, consider the following integral:
2
1
𝑎
𝑔=
+ 𝑏) 𝑒−𝑎 𝑑𝑎.
∫ erf (
√𝜋 −∞
√𝑚
(22)
1
= 0.7071
√1 + 𝑐
and, thus, 𝑐 = 1, so that
∞
1 −V2
𝑒 ] ,
√𝜋
−∞
𝑔 = erf (𝑏
𝑎
𝑎
1 −(𝑎/√𝑚+𝑏)2 ∞
] .
+ 𝑏) erf (
+ 𝑏) +
𝑒
√𝑚
√𝑚
√𝜋
−∞
(17)
(28)
√𝑚
)
√𝑚 + 1
(29)
or
2
√𝑚
1 ∞
𝑎
+ 𝑏) 𝑒−𝑎 𝑑𝑎 = erf (𝑏
).
∫ erf (
√𝜋 −∞
√𝑚
√𝑚 + 1
(30)
Equation (30) implies that
Condition 2. Consider
𝑠 = 2𝑏√𝑚.
Therefore, 𝑔 must vary as 𝑏 and √𝑚.
Now, because the error function is odd, we can write
2
1 ∞
𝑎
) 𝑒−𝑎 𝑑𝑎 = 0.
∫ erf (
√𝜋 −∞
√𝑚
𝑛 |𝑧| −𝑢2
𝑢
𝑛 |𝑧| √2
1 ∞
+
) (31)
) 𝑒 𝑑𝑢 = erf (
∫ erf (
√𝜋 −∞
√2
2𝜎
2𝜎√3
(18)
or
(19)
𝐸𝑦 (𝑃) = erf (
𝑛 |𝑧| √2
).
2𝜎√3
(32)
4
Journal of Applied Mathematics
4. The Probability Averaged over
the Sample Standard Deviation
1
0.9
The expectation with respect to 𝑧 can be written as
𝐸𝑧 (𝐸𝑦 (𝑃)) =
0.8
∞
𝑛 |𝑧| √2 −𝑧2 /4𝜎2
1
𝑑𝑧, (33)
)𝑒
∫ erf (
2𝜎√𝜋 −∞
2𝜎√3
where we have used the fact that the standard deviation of
𝑧 is √2𝜎 based on previous information and the fact that
var(𝑎𝑋) = 𝑎2 var(𝑋) [6]. Equation (33) can be expressed on a
semi-infinite interval as
∞
1
𝑛𝑧√2 −𝑧2 /4𝜎2
𝐸𝑧 (𝐸𝑦 (𝑃)) =
𝑑𝑧.
)𝑒
∫ erf (
𝜎√𝜋 0
2𝜎√3
(34)
𝑃
0.6
0.5
0.4
0.3
0.2
0.5
1
1.5
2
2.5
3
3.5
4
𝑛
Let 𝑞 = 𝑧/2𝜎. So, 𝑑𝑞 = 𝑑𝑧/2𝜎, and (34) becomes
𝐸𝑧 (𝐸𝑦 (𝑃)) =
0.7
2
2
2 ∞
∫ erf (𝑛𝑞√ ) 𝑒−𝑞 𝑑𝑞,
√𝜋 0
3
𝑃 integral
𝑃 estimate
(35)
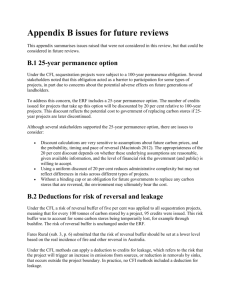
∞
2
Figure 1: A plot of (2/√𝜋) ∫0 erf(𝑛𝑞√2/3)𝑒−𝑞 𝑑𝑞 versus the estimate 𝑀(𝛽)/𝑀 for 𝑀 = 2000.
or we can write
⟨𝑃 (𝑥𝑁=2 − 𝑛𝑠𝑁=2 ≤ 𝑥 ≤ 𝑥𝑁=2 + 𝑛𝑠𝑁=2 )⟩
=
(36)
2
2
2 ∞
∫ erf (𝑛𝑞√ ) 𝑒−𝑞 𝑑𝑞.
√𝜋 0
3
5. Computational Simulation
We can estimate ⟨𝑃(𝑥𝑁=2 − 𝑛𝑠𝑁=2 ≤ 𝑥 ≤ 𝑥𝑁=2 + 𝑛𝑠𝑁=2 )⟩
computationally. Simulate the normal, independent random
variables 𝑋 and {𝑋𝑖 }, for which
𝑥 ∈ 𝑋,
𝑥𝑖 ∈ 𝑋𝑖 .
(37)
Let the condition 𝛽 be
is in the form of an integral of the error function that we
have evaluated numerically and compared to a computer
simulation that estimates the probability based on frequency.
The comparison shows a high level of agreement that supports the validity of the derivation.
This work is part of a research effort interested in constructing confidence intervals based on various levels of
knowledge. Example applications exist in geophysical exploration and cancer treatment.
Acknowledgment
Discussions with Gwendolyn Houston are appreciated.
References
𝛽 : (𝑥𝑁=2 − 𝑛𝑠𝑁=2 ≤ 𝑥 ≤ 𝑥𝑁=2 + 𝑛𝑠𝑁=2 ) .
(38)
If 𝑀(𝛽) is the number of trials in which the condition 𝛽 is
met and 𝑀 is the total number of trials, then an estimate of
⟨𝑃(𝑥𝑁=2 − 𝑛𝑠𝑁=2 ≤ 𝑥 ≤ 𝑥𝑁=2 + 𝑛𝑠𝑁=2 )⟩ is given as
⟨𝑃 (𝑥𝑁=2 − 𝑛𝑠𝑁=2 ≤ 𝑥 ≤ 𝑥𝑁=2 + 𝑛𝑠𝑁=2 )⟩ ≈
∞
𝑀 (𝛽)
.
𝑀
(39)
2
Figure 1 shows a plot of (2/√𝜋) ∫0 erf(𝑛𝑞√2/3)𝑒−𝑞 𝑑𝑞 versus
𝑀(𝛽)/𝑀 for 𝑀 = 2000.
6. Conclusions
We have computed the probability of a confidence interval
based on minimal estimates of the mean and the standard
deviation. Specifically, the estimates are based on two measurements. The effort addresses the problem of constructing
a confidence interval based on minimal knowledge. The result
[1] L. M. Houston, “The probability that a measurement falls within
a range of n standard deviations from an estimate of the mean,”
ISRN Applied Mathematics, vol. 2012, Article ID 710806, 8 pages,
2012.
[2] L. M. Houston and G. L. Kinsland, “Minimal-effort time-lapse
seismic monitoring: exploiting the relationship between acquisition and imaging in time-lapse data,” The Leading Edge, vol. 17,
no. 10, pp. 1440–1443, 1998.
[3] C. A. Perez, M. Bauer, S. Edelstein et al., “Impact of tumor
control on survival in carcinoma of the lung treated with irradiation,” International Journal of Radiation Oncology, Biology and
Physics, vol. 12, no. 4, pp. 539–547, 1986.
[4] U. Balasooriva, J. Li, and C. K. Low, “On interpreting and
extracting information from the cumulative distribution function curve: a new perspective with applications,” Australian
Senior Mathematics Journal, vol. 26, no. 1, pp. 19–28, 2012.
[5] L. M. Houston, G. A. Glass, and A. D. Dymnikov, “Sign-bit
amplitude recovery in Gaussian noise,” Journal of Seismic Exploration, vol. 19, no. 3, pp. 249–262, 2010.
[6] Y. A. Rozanov, Probability Theory: A Concise Course, Dover
Publications, New York, NY, USA, 1977.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014