Document 10905157
advertisement

Hindawi Publishing Corporation
Journal of Applied Mathematics
Volume 2012, Article ID 416476, 23 pages
doi:10.1155/2012/416476
Research Article
Convergence Theorems for
Equilibrium Problems and Fixed-Point Problems of
an Infinite Family of ki -Strictly Pseudocontractive
Mapping in Hilbert Spaces
Haitao Che,1, 2 Meixia Li,1 and Xintian Pan1
1
2
School of Mathematics and Information Science, Weifang University, Shandong Weifang 261061, China
School of Management Science, Qufu Normal University, Shandong Rizhao 276800, China
Correspondence should be addressed to Haitao Che, haitaoche@163.com
Received 28 February 2012; Revised 8 June 2012; Accepted 24 June 2012
Academic Editor: Jong Hae Kim
Copyright q 2012 Haitao Che et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
We first extend the definition of Wn from an infinite family of nonexpansive mappings to an infinite
family of strictly pseudocontractive mappings, and then propose an iterative scheme by the
viscosity approximation method for finding a common element of the set of solutions of an
equilibrium problem and the set of fixed points of an infinite family of ki -strictly pseudocontractive
mappings in Hilbert spaces. The results obtained in this paper extend and improve the recent
ones announced by many others. Furthermore, a numerical example is presented to illustrate the
effectiveness of the proposed scheme.
1. Introduction
Let H be a real Hilbert space with inner product ·, · and induced norm · . Let C be a
nonempty closed convex subset of H and let F : C × C → R be a bifunction. We consider the
following equilibrium problem EP which is to find z ∈ C such that
EP : F z, y ≥ 0,
∀y ∈ C.
1.1
Denote the set of solutions of EP by EPF. Given a mapping T : C → H, let Fx, y T x,
y − x for all x, y ∈ C. Then, z ∈ EPF if and only if T x, y − x ≥ 0 for all y ∈ C, that is, z
is a solution of the variational inequality. Numerous problems in physics, optimization, and
2
Journal of Applied Mathematics
economics reduce to find a solution of 1.1. Some methods have been proposed to solve the
equilibrium problem 1–13.
A mapping B : C → C is called θ-Lipschitzian if there exists a positive constant θ such
that
Bx − By ≤ θx − y,
∀x, y ∈ C.
1.2
B is said to be η-strongly monotone if there exists a positive constant η such that
2
Bx − By, x − y ≥ ηx − y ,
∀x, y ∈ C.
1.3
A mapping S : C → C is said to be k-strictly pseudocontractive mapping if there exists a
constant 0 ≤ k < 1 such that
Sx − Sy2 ≤ x − y2 kI − Sx − I − Sy2 ,
1.4
for all x, y ∈ C and FS denotes the set of fixed point of the mapping S, that is FS {x ∈
C : Sx x}.
If k 1, then S is said to a pseudocontractive mapping, that is,
Sx − Sy2 ≤ x − y2 I − Sx − I − Sy2 ,
1.5
is equivalent to
I − Sx − I − Sy, x − y ≥ 0,
1.6
for all x, y ∈ C.
The class of k-strict pseudo-contractive mappings extends the class of nonexpansive
mappings A mapping T is said to be nonexpansive if T x − T y ≤ x − y, for all x, y ∈ C.
That is, S is nonexpansive if and only if S is a 0-strict pseudocontractive mapping. Clearly,
the class of k-strictly pseudocontractive mappings falls into the one between classes of
nonexpansive mappings and pseudo-contractive mapping.
In 2006, Marino and Xu 14 introduced the general iterative method and proved that
for a given x0 ∈ H, the sequence {xn } generated by the algorithm
xn1 αn γfxn I − αn BT xn ,
n ∈ N,
1.7
where T is a self-nonexpansive mapping on H, f is an α-contraction of H into itself i.e.,
fx − fy ≤ αx − y, for all x, y ∈ H and α ∈ 0, 1, {αn } ⊂ 0, 1 satisfies certain
conditions, B is strongly positive bounded linear operator on H, and converges strongly to
fixed point x∗ of T which is the unique solution to the following variational inequality:
γf − B x∗ , x∗ − x ≤ 0,
∀x ∈ FT .
1.8
Journal of Applied Mathematics
3
Tian 15 considered the following iterative method, for a nonexpansive mapping
T :H → H with FT /
∅,
xn1 αn γfxn I − μαn F T xn ,
n ∈ N,
1.9
where F is k-Lipschitzian and η-strongly monotone operator. The sequence {xn } converges
strongly to fixed-point q in FT which is the unique solution to the following variational
inequality:
γf − μF q, p − q ≤ 0,
p ∈ FT .
1.10
For finding a common element of EPF ∩ FS, S. Takahashi and W. Takahashi 16
introduced an iterative scheme by the viscosity approximation method for finding a common
element of the set of solution 1.1 and the set of fixed points of a nonexpansive mapping in
a Hilbert space. Let S : C → H be a nonexpansive mapping. Starting with arbitrary initial
point x1 ∈ H, define sequences {xn } and {un } recursively by
1
F un , y y − un , un − xn ≥ 0,
rn
xn1 αn fxn 1 − αn Sun ,
∀y ∈ C,
1.11
∀n ∈ N.
They proved that under certain appropriate conditions imposed on {αn } and {rn }, the sequences {xn } and {un } converge strongly to z ∈ FS ∩ EPF, where z PFS∩EPF fz.
Liu 17 introduced the following scheme: x1 ∈ H and
1
F un , y y − un , un − xn ≥ 0,
rn
yn βn un 1 − βn Sun ,
xn1 αn γfxn I − αn Byn ,
∀y ∈ C,
1.12
∀n ∈ N,
where S is a k-strict pseudo-contractive mapping and B is a strongly positive bounded linear
operator. They proved that under certain appropriate conditions imposed on {αn }, {βn }, and
{rn }, the sequence {xn } converges strongly to z ∈ FS ∩ EPF, where z PFS∩EPF I − B γfz.
In 18, the concept of W mapping had been modified for a countable family {Tn }n∈N
of nonexpansive mappings by defining the sequence {Wn }n∈N of W-mappings generated by
{Tn }n∈N and {λn } ⊂ 0, 1, proceeding backward
Un,n1 : I,
Un,n : λn Tn Un,n1 1 − λn I,
···
4
Journal of Applied Mathematics
Un,k : λk Tk Un,k1 1 − λk I,
···
Un,2 : λ2 T2 Un,3 1 − λ2 I,
Wn Un,1 : λ1 T1 Un,2 1 − λ1 I.
1.13
Yao et al. 19 using this concept, introduced the following algorithm: x1 ∈ H and
xn1
1
F un , y y − un , un − xn ≥ 0, ∀y ∈ C,
rn
αn fxn βn xn 1 − αn − βn Wn un , ∀n ∈ N.
1.14
They proved that under certain appropriate conditions imposed on {αn } and {rn }, the se
quences {xn } and {un } converge strongly to z ∈ ∞
i1 FTi ∩ EPF.
Colao and Marino 20 considered the following explicit viscosity scheme
xn1
1
F un , y y − un , un − xn ≥ 0, ∀y ∈ C,
rn
αn rfxn βn xn 1 − βn I − αn A Wn un , ∀n ∈ N,
1.15
where A is a strongly positive operator on H. Under certain appropriate conditions, the
sequences {xn } and {un } converge strongly to z ∈ ∞
i1 FTi ∩ EPF.
Motivated and inspired by these facts, in this paper, we first extend the definition of
Wn from an infinite family of nonexpansive mappings to an infinite family of strictly pseudocontractive mappings, and then propose the iteration scheme 3.2 for finding an element of
EPF ∞
i1 FSi , where {Si } is an infinite family of ki -strictly pseudo-contractive mappings
of C into itself. Finally, the convergence theorem of the iteration scheme is obtained. Our
results include Yao et al. 19, Colao and Marino 20 as some special cases.
2. Preliminaries
Throughout this paper, we always assume that C is a nonempty closed convex subset of a
Hilbert space H. We write xn x to indicate that the sequence {xn } converges weakly to x.
xn → x implies that {xn } converges strongly to x. We denote by N and R the sets of positive
integers and real numbers, respectively. For any x ∈ H, there exists a unique nearest point in
C, denoted by PC x, such that
x − PC x ≤ x − y,
∀y ∈ C.
2.1
Such a PC is called the metric projection of H onto C. It is known that PC is nonexpansive.
Furthermore, for x ∈ H and u ∈ C,
u PC x ⇐⇒ x − u, u − y ≥ 0,
∀y ∈ C.
2.2
Journal of Applied Mathematics
5
It is widely known that H satisfies Opial s condition 21, that is, for any sequence {xn } with
xn x, the inequality
lim infxn − x < lim infxn − y
n→∞
n→∞
2.3
holds for every y ∈ H with y /
x.
In order to solve the equilibrium problem for a bifunction F : C × C → R, we assume
that F satisfies the following conditions:
A1 Fx, x 0, for all x ∈ C.
A2 F is monotone, that is, Fx, y Fy, x ≤ 0, for all x, y ∈ C.
A3 limt↓0 Ftz 1 − tx, y ≤ Fx, y, for all x, y, z ∈ C.
A4 For each x ∈ C, y → Fx, y is convex and lower semicontinuous.
Let us recall the following lemmas which will be useful for our paper.
Lemma 2.1 see 22. Let F be a bifunction from C ×C into R satisfying (A1), (A2), (A3), and (A4).
Then, for any r > 0 and x ∈ H, there exists z ∈ C such that
1
F z, y y − z, z − x ≥ 0,
r
∀y ∈ C.
2.4
Furthermore, if Tr x {z ∈ C : Fz, y 1/ry − z, z − x ≥ 0, ∀y ∈ C}, then the following hold:
1 Tr is single-valued.
2 Tr is firmly nonexpansive, that is,
Tr x − Tr y2 ≤ Tr x − Tr y, x − y,
∀x, y ∈ H.
2.5
3 FTr EP F.
4 EP F is closed and convex.
Lemma 2.2 see 23. Let S : C → H be a k-strictly pseudo-contractive mapping. Define T : C →
H by T x λx 1 − λSx for each x ∈ C. Then, as λ ∈ k, 1, T is nonexpansive mapping such that
FT FS.
Lemma 2.3 see 24. In a Hilbert space H, there holds the inequality
x y2 ≤ x2 2y, x y,
∀x, y ∈ H.
2.6
Lemma 2.4 see 25. Let H be a Hilbert space and C be a closed convex subset of H, and T : C →
C a nonexpansive mapping with FT /
∅. If {xn } is a sequence in C weakly converging to x and if
{I − T xn } converges strongly to y, then I − T x y.
6
Journal of Applied Mathematics
Lemma 2.5 see 26. Let {xn } and {zn } be bounded sequences in a Banach space E and {γn } be a
sequence in 0, 1 satisfying the following condition
0 < lim inf γn ≤ lim sup γn < 1.
n→∞
n→∞
2.7
Suppose that xn1 γn xn 1 − γn zn , n ≥ 0 and limn → ∞ supzn1 − zn − xn1 − xn ≤ 0. Then
limn → ∞ zn − xn 0.
Lemma 2.6 see 27. Assume that {an } is a sequence of nonnegative real numbers such that
an1 ≤ 1 − bn an bn δn ,
n ≥ 0,
2.8
where {bn } is a sequence in 0, 1 and {δn } is a sequence in R, such that
i ∞
i1 bi ∞.
ii limn → ∞ sup δn ≤ 0 or ∞
i1 |bn δn | < ∞.
Then, limn → ∞ an 0.
Let {Si } be an infinite family of ki -strictly pseudo-contractive mappings of C into itself,
we define a mapping Wn of C into itself as follows,
Un,n1 : I,
Un,n : τn Sn Un,n1 1 − τn I,
···
Un,k : τk Sk Un,k1 1 − τk I,
2.9
···
Un,2 : τ2 S2 Un,3 1 − τ2 I,
Wn Un,1 : τ1 S1 Un,2 1 − τ1 I,
where 0 ≤ τi ≤ 1, Si σi I 1 − σi Si and σi ∈ ki , 1 for i ∈ N. We can obtain Si is a
nonexpansive mapping and FSi FSi by Lemma 2.2. Furthermore, we obtain that Wn is
a nonexpansive mapping.
Remark 2.7. If ki 0, and σi 0 for i ∈ N, then the definition of Wn in 2.9 reduces to the
definition of Wn in 1.13.
To establish our results, we need the following technical lemmas.
Lemma 2.8 see 18. Let C be a nonempty closed convex subset of a strictly convex Banach space.
Let {Si } be an infinite family of nonexpansive mappings of C into itself and let {τi } be a real sequence
such that 0 < τi ≤ b < 1 for every i ∈ N. Then, for every x ∈ C and k ∈ N, the limit limn → ∞ Un,k x
exists.
Journal of Applied Mathematics
7
In view of the previous lemma, we will define
Wx : lim Wn x lim Un,1 x,
n→∞
n→∞
x ∈ C.
2.10
Lemma 2.9 see 18. Let C be a nonempty closed convex subset of a strictly convex Banach space.
Let {Si } be an infinite family of nonexpansive mappings of C into itself such that ∞
FSi /
∅ and
i1
∞
let {τi } be a real sequence such that 0 < τi ≤ b < 1 for every i ∈ N. Then, FW i1 FSi / ∅.
The following lemmas follow from Lemmas 2.2, 2.8, and 2.9.
Lemma 2.10. Let C be a nonempty closed convex subset of a strictly convex Banach space. Let {Si } be
∅.
an infinite family of ki -strictly pseudo-contractive mappings of C into itself such that ∞
i1 FSi /
Define Si σi I 1 − σi Si and σi ∈ ki , 1 and let {τi } be a real sequence such that 0 < τi ≤ b < 1
∞
∅.
for every i ∈ N. Then, FW ∞
i1 FSi i1 FSi /
Lemma 2.11 see 28. Let C be a nonempty closed convex subset of a Hilbert space. Let {Si } be an
infinite family of nonexpansive mappings of C into itself such that ∞
/ ∅ and let {τi } be a real
i1 FSi sequence such that 0 < τi ≤ b < 1 for every i ∈ N. If K is any bounded subset of C, then
lim supWx − Wn x 0.
n → ∞ x∈K
2.11
3. Main Results
Let H be a real Hilbert space and F be a k-Lipschitzian and η-strongly monotone operator
with k > 0, η > 0, 0 < μ < 2η/k2 and 0 < t < 1. Then, for t ∈ min{0, {1, 1/τ}}, S I − tμF :
H → H is a contraction with contractive coefficient 1 − tτ and τ 1/2μ2η − μk2 .
In fact, from 1.2 and 1.3, we obtain
Sx − Sy2 x − y − tμFx − Fy2
2
2
x − y t2 μ2 Fx − Fy − 2tμFx − Fy, x − y
2
2
2
≤ x − y k2 t2 μ2 x − y − 2tημx − y
≤ 1 − tμ 2η − μk2
3.1
x − y2
2
≤ 1 − tτ2 x − y .
Thus, S 1 − tμF is a contraction with contractive coefficient 1 − tτ ∈ 0, 1.
Now, we show the strong convergence results for an infinite family ki -strictly pseudocontractive mappings in Hilbert space.
Theorem 3.1. Let C be a nonempty closed convex subset of a real Hilbert space H and F be a
bifunction from C × C → R satisfying (A1)–(A4). Let Si : C → C be a ki -strictly pseudo-contractive
∅ and {τi } be a real sequence such that 0 < τi ≤ b < 1, i ∈ N. Let
mapping with ∞
i1 FSi ∩ EP /
f be a contraction of H into itself with β ∈ 0, 1 and B be k-Lipschitzian and η-strongly monotone
8
Journal of Applied Mathematics
operator on H with coefficients k, η > 0, 0 < μ < 2η/k2 , 0 < r < 1/2μ2η − μk2 /β τ/β and
τ < 1. Let {xn } be a sequence generated by
1
F un , y y − un , un − xn ≥ 0,
λn
xn1
∀y ∈ C,
yn δn un 1 − δn Wn un ,
αn rfxn βn xn 1 − βn I − μαn B yn ,
3.2
∀n ∈ N,
where un Tλn xn and {Wn : C → C} is the sequence defined by 2.9. If {αn }, {βn }, {δn }, and {λn }
satisfy the following conditions:
i {αn } ⊂ 0, 1, limn → ∞ αn 0,
∞
i1
αn ∞,
ii 0 < limn → ∞ inf βn ≤ limn → ∞ sup βn < 1,
iii 0 < limn → ∞ inf δn ≤ limn → ∞ sup δn < 1, limn → ∞ |δn1 − δn | 0,
iv {λn } ⊂ 0, ∞, limn → ∞ λn > 0, limn → ∞ |λn1 − λn | 0.
Then {xn } converges strongly to z ∈
variational inequality
∞
i1
FSi ∩ EP /
∅, where z is the unique solution of
lim sup rf − μB z, p − z ≤ 0,
n→∞
∀p ∈
∞
i1
FSi ∩ EP /
∅,
3.3
that is, z PFW∩EP F I − μB rfz, which is the optimality condition for the minimization problem
1
min
z∈ ∞
i1 FSi ∩EP 2
μBz, z − hz,
3.4
where h is a potential function for rf (i.e., h z rfz for z ∈ H).
Proof . We divide the proof into five steps.
Step 1. We prove that {xn } is bounded.
Noting the conditions i and ii, we may assume, without loss of generality, that
αn /1 − βn ≤ min{1, 1/τ}. For x, y ∈ C, we obtain
1 − βn I − αn μB x − 1 − βn I − αn μB y
≤ 1 − βn I−
αn
αn
μB x − I −
μB y
1 − βn
1 − βn
αn
≤ 1 − βn 1 −
τ x − y
1 − βn
1 − βn − αn τ x − y.
3.5
Journal of Applied Mathematics
9
∅. Since un Tλn xn and p Tλn p, then from Lemma 2.1, we know
Take p ∈ ∞
i1 FSi ∩ EP /
that, for any n ∈ N,
un − p Tλ xn − Tλ p ≤ xn − p.
n
n
3.6
Furthermore, since Wn p p and 3.6, we have
yn − p δn un 1 − δn Wn un − p
δn un − p 1 − δn Wn un − p ≤ δn un − p 1 − δn Wn un − p
≤ un − p ≤ xn − p.
3.7
Thus, it follows from 3.7 that
xn1 − p αn rfxn βn xn 1 − βn I − μαn B yn − p
αn r fxn − f p αn rf p − μBp
βn xn − p 1 − βn I − μαn B yn − p ≤ αn rβxn − p αn rf p − μBp βn xn − p
1 − βn − ταn yn − p
≤ 1 − αn τ − rβ xn − p αn rf p − μBp
3.8
rf p − μBp
≤ max xn − p ,
.
τ − rβ
By induction, we have
rf p − μBp
xn − p ≤ max x1 − p,
,
τ − rβ
n ≥ 1.
3.9
Hence, {xn } is bounded and we also obtain that {un }, {Wn un }, {yn }, {Byn }, and {fxn } are
all bounded. Without loss of generality, we can assume that there exists a bounded set K ⊂ C
such that {un }, {Wn un }, {yn }, {Byn }, {fxn } ∈ K, for all n ∈ N.
Step 2. We show that limn → ∞ xn − xn1 0.
Let xn1 1 − βn zn βn xn . We note that
xn1 − βn xn αn rfxn zn 1 − βn
1 − βn I − μαn B yn
,
1 − βn
3.10
10
Journal of Applied Mathematics
and then
1 − βn1 I − μαn1 B yn1
zn1 − zn 1 − βn1
αn rfxn 1 − βn I − μαn B yn
−
1 − βn
αn1 rfxn1 3.11
αn1 αn rfxn1 − μByn1 −
rfxn − μByn yn1 − yn .
1 − βn1
1 − βn
Therefore,
zn1 − zn ≤
αn1 rfxn1 μByn1 1 − βn1
αn rfxn μByn yn1 − yn .
1 − βn
3.12
It follows from 3.2 that
yn1 − yn δn1 un1 1 − δn1 Wn1 un1 − δn un 1 − δn Wn un ≤ |δn1 − δn |un δn1 un1 − un 1 − δn1 Wn1 un1 − Wn un 3.13
|δn1 − δn |Wn un .
We will estimate un1 − un . From un1 Tλn1 xn1 and un Tλn xn , we obtain
1 F un1 , y y − un1 , un1 − yn1 ≥ 0,
λn1
1
F un , y y − un , un − yn ≥ 0,
λn
∀y ∈ C,
∀y ∈ C.
3.14
3.15
Taking y un in 3.14 and y un1 in 3.15, we have
Fun1 , un 1
λn1
un − un1 , un1 − xn1 ≥ 0,
1
Fun , un1 un1 − un , un − xn ≥ 0.
λn
3.16
So, from A2, one has
un − xn un1 − xn1
−
un1 − un ,
λn
λn1
≥ 0,
3.17
Journal of Applied Mathematics
11
furthermore,
λn
un1 − un , un − un1 − xn −
un1 − xn1 ≥ 0.
λn1
3.18
Since limn → ∞ λn > 0, we assume that there exists a real number such that λn > a > 0 for all
n ∈ N. Thus, we obtain
λn
un1 − xn1 λn1
λn ≤ un1 − un xn1 − xn 1 −
−
x
,
u
n1
n1
λn1 un1 − un 2 ≤
un1 − un , xn1 − xn 1 −
3.19
which means
λn un1 − xn1 un1 − un ≤ xn1 − xn 1 −
λn1 ≤ xn1 − xn 1
|λn1 − λn |un1 − xn1 a
3.20
≤ xn1 − xn L1 |λn1 − λn |,
where L1 sup{un1 − xn1 : n ∈ N}.
Next, we estimate Wn1 un1 − Wn un . Notice that
Wn1 un1 − Wn un Wn1 un1 − Wn1 un Wn1 un − Wn un ≤ un1 − un Wn1 un − Wn un .
3.21
From 2.9, we obtain
Wn1 un − Wn un τ1 S1 Un1,2 un − τ1 S1 Un,2 un ≤ τ1 Un1,2 un − Un,2 un τ1 τ2 S2 Un1,3 un − τ2 S2 Un,3 un ≤ τ1 τ2 Un1,3 un − Un,3 un ≤ ···
≤ τ1 τ2 · · · τn Un1,n1 un − Un,n1 un ≤ L2
n
τi ,
i1
where L2 ≥ 0 is a constant such that Un1,n1 un − Un,n1 un ≤ L2 , for all n ∈ N.
3.22
12
Journal of Applied Mathematics
Substituting 3.20 and 3.22 into 3.21, we obtain
Wn1 un1 − Wn un ≤ xn1 − xn L1 |λn1 − λn | L2
n
τi .
3.23
i1
Hence, we have
yn1 − yn ≤ |δn1 − δn |un Wn un xn1 − xn 1 − δn1 L2
n
τi L1 |λn1 − λn |
3.24
i1
≤ L3 |δn1 − δn | xn1 − xn 1 − δn1 L2
n
τi L1 |λn1 − λn |,
i1
where L3 sup{un Wn un : n ∈ N}.
Furthermore,
zn1 − zn ≤
αn1 rfxn1 μByn1 1 − βn1
αn rfxn μByn 1 − βn
xn1 − xn L1 |λn1 − λn | L2 1 − δn1 n
3.25
τi
i1
L3 |δn1 − δn |.
It follows from 3.25 that
zn1 − zn − xn1 − xn ≤
αn1 rfxn1 μByn1 αn rfxn μByn 1 − βn1
1 − βn
L1 |λn1 − λn | L2 1 − δn1 n
3.26
τi L3 |δn1 − δn |.
i1
By the conditions i, iii, and iv, we obtain
lim supzn1 − zn − xn1 − xn ≤ 0.
n→∞
3.27
Hence, by Lemma 2.5, one has
lim zn − xn 0,
n→∞
3.28
Journal of Applied Mathematics
13
which implies
lim xn1 − xn lim 1 − βn zn − xn 0.
n→∞
3.29
n→∞
Step 3. We claim that limn → ∞ Wun − un 0.
Notice that
Wun − un Wun − Wn un Wn un − un ≤ Wun − Wn un Wn un − un 3.30
≤ supWu − Wn u Wn un − un .
u∈K
It follows from 3.2 that
Wn un − un Wn un − yn yn − un ≤ yn − un Wn un − yn yn − un δn Wn un − un ≤ xn − un yn − xn δn Wn un − un .
3.31
By the condition iii, we obtain
Wn un − un ≤
1 xn − un yn − xn .
1 − δn
First, we show limn → ∞ xn −un 0. From 3.2, for all p ∈
Lemma 2.3 and noting that · is convex, we obtain
∞
i1
3.32
FSi ∩EPF, applying
xn1 − p2 αn rfxn βn xn 1 − βn I − μαn B yn − p2
2
αn rfxn μByn βn xn − p 1 − βn yn − p 2
≤ βn xn − p 1 − βn yn − p 2αn rfxn μByn , xn1 − p
2 2
≤ βn xn − p 1 − βn yn − p 2αn rfxn μByn xn1 − p
2 2
≤ βn xn − p 1 − βn un − p 2αn rfxn μByn xn1 − p.
3.33
Since un Tλn xn , p Tλn p, we have
un − p2 Tλ xn − Tλ p2 ≤ xn − p, un − p
n
n
1 xn − p2 un − p2 − xn − un 2 ,
2
3.34
14
Journal of Applied Mathematics
which implies
un − p2 ≤ xn − p2 − xn − un 2 .
3.35
Substituting 3.35 into 3.33, we have
xn1 − p2 ≤ xn − p2 − 1 − βn xn − un 2 2αn rfxn μByn xn1 − p,
3.36
which means
2 2
1 − βn xn − un 2 ≤ xn − p − xn1 − p 2αn rfxn μByn xn1 − p
≤ xn1 − xn xn − p xn1 − p 2αn rfxn μByn xn1 − p.
3.37
Noticing limn → ∞ αn 0 and limn → ∞ inf1 − βn > 0, we have
lim xn − un 0.
n→∞
3.38
Second, we show limn → ∞ yn − xn 0. It follows from 3.2 that
yn − xn ≤ yn − xn1 xn1 − xn αn rfxn βn xn 1 − βn I − μαn B yn − yn xn1 − xn ≤ αn rfxn μByn βn xn − yn xn1 − xn .
3.39
This implies that
1 − βn yn − xn ≤ αn rfxn μByn xn1 − xn .
3.40
Noticing limn → ∞ αn 0, limn → ∞ inf1 − βn > 0 and 3.30, we have
lim yn − xn 0.
n→∞
3.41
Thus, substituting 3.41 and 3.38 into 3.32, we obtain
lim Wn un − un 0.
n→∞
3.42
Furthermore, 3.42, 3.30, and Lemma 2.11 lead to
lim Wun − un 0.
n→∞
3.43
Journal of Applied Mathematics
15
Step 4. Letting z PFW∩EPF I − μB rfz, we show
lim sup rf − μB z, xn − z ≤ 0.
n→∞
3.44
We know that PFW∩EPF I − μB rf is a contraction. Indeed, for any x, y ∈ H, we have
PFW∩EPF I − μB rf x − PFW∩EPF I − μB rf y
≤ I − μB rf x − I − μB rf y
≤ 1 − τ rβ x − y,
3.45
and hence PFW∩EPF I − μB rf is a contraction due to 1 − τ rβ ∈ 0, 1. Thus, Banach’s
Contraction Mapping Principle guarantees that PFW∩EPF I − μB rf has a unique fixed
point, which implies z PFW∩EPF I − μB rfz.
Since {uni } ⊂ {un } is bounded in C, without loss of generality, we can assume that
{uni } ω, it follows from 3.43 that Wuni ω. Since C is closed and convex, C is weakly
closed. Thus we have ω ∈ C.
Let us show ω ∈ FW. For the sake of contradiction, suppose that ω ∈
/ FW, that is,
}
ω,
by
the
Opial
condition,
we
have
Wω ω.
Since
{u
/
ni
lim infuni − ω < lim infuni − Wω
n→∞
n→∞
≤ lim inf{uni − Wuni Wuni − Wω}
n→∞
3.46
≤ lim inf{uni − Wuni uni − ω}.
n→∞
It follows 3.43 that
lim infuni − ω < lim infuni − ω.
n→∞
n→∞
3.47
This is a contradiction, which shows that ω ∈ FW.
Next, we prove that ω ∈ EPF. By 3.2, we obtain
1
F un , y y − un , un − xn ≥ 0.
λn
3.48
1
y − un , un − xn ≥ F y, un .
λn
3.49
1
y − uni ,
uni − xni ≥ F y, uni .
λni
3.50
It follows from A2 that
Replacing n by ni , we have
16
Journal of Applied Mathematics
Since 1/λni uni −xni → 0 and {uni } ω, it follows from A4 that Fy, ω ≥ 0 for all y ∈ C.
Put zt ty 1 − tω for all t ∈ 0, 1 and y ∈ C. Then, we have zt ∈ C and then Fzt , ω ≥ 0.
Hence, from A1 and A4, we have
0 Fzt , zt ≤ tF zt , y 1 − tF zt , y ≤ tF zt , y ,
3.51
which means Fzt , y ≥ 0. From A3, we obtain Fω, y ≥ 0 for y ∈ C and then ω ∈ EPF.
Therefore, ω ∈ FW ∩ EPF.
Since z PFW∩EPF I − μB rfz, it follows from 3.38, 3.42, and Lemma 2.11 that
lim sup rf − μB z, xn − z ≤ lim rf − μB z, xni − z
n→∞
i→∞
lim
i→∞
rf − μB z, xni − uni
lim
rf − μB z, uni − Wni uni
i→∞
lim
rf − μB z, Wni uni − Wuni
i→∞
lim
i→∞
3.52
rf − μB z, Wuni − z
rf − μB z, ω − z ≤ 0.
Step 5. Finally we prove that xn → ω as n → ∞. In fact, from 3.2 and 3.7, we obtain
2
xn1 − ω2 αn rfxn βn xn 1 − βn I − μαn B yn − ω
αn r fxn − fω αn rfω − μBω
2
βn xn − ω 1 − βn I − μαn B yn − ω αn r fxn − fω, xn1 − ω αn rfω − μBω, xn1 − ω
βn xn − ω, xn1 − ω 1 − βn I − μαn B yn − ω , xn1 − ω
xn − ω2 xn1 − ω2
αn rfω − μBω, xn1 − ω
2
2
yn − ω xn1 − ω2
xn − ω2 xn1 − ω2 βn
1 − βn − αn τ
2
2
1 − αn τ − rβ
≤
xn − ω2 xn1 − ω2 αn rfω − μBω, xn1 − ω ,
2
3.53
≤ αn rβ
Journal of Applied Mathematics
17
which implies
1 − αn τ − rβ
xn − ω2
xn1 − ω ≤
1 αn τ − rβ
2αn τ − rβ
rfω − μBω, xn1 − ω
1 αn τ − rβ τ − rβ
≤ 1 − αn τ − rβ xn − ω2
2αn τ − rβ
rfω − μBω, xn1 − ω.
1 αn τ − rβ τ − rβ
2
3.54
From condition i and 3.7, we know that ni1 αn τ − rβ ∞ and limi → ∞ sup2/1 αn τ −
rβτ − rβrfω − μBω, xn1 − ω ≤ 0. we can conclude from Lemma 2.6 that xn → ω as
n → ∞. This completes the proof of Theorem 3.1.
Remark 3.2. If r 1, μ 1, B I and δi 0, ki 0, σi 0 for i ∈ N, then Theorem 3.1 reduces
to Theorem 3.5 of Yao et al. 19. Furthermore, we extend the corresponding results of Yao
et al. 19 from one infinite family of nonexpansive mapping to an infinite family of strictly
pseudo-contractive mappings.
Remark 3.3. If μ 1 and δi 0, ki 0, σi 0 for i ∈ N, then Theorem 3.1 reduces to Theorem
10 of Colao and Marino 20. Furthermore, we extend the corresponding results of Colao and
Marino 20 from one infinite family of nonexpansive mapping to an infinite family of strictly
pseudo-contractive mappings, and from a strongly positive bounded linear operator A to a
k-Lipschitzian and η-strongly monotone operator B.
Theorem 3.4. Let C be a nonempty closed convex subset of a real Hilbert space H and F be a
bifunction from C × C → R satisfying (A1)–(A4). Let S : C → C be a nonexpansive mapping
with FS ∩ EP / ∅. Let f be a contraction of H into itself with β ∈ 0, 1 and B be k-Lipschitzian
and η-strongly monotone operator on H with coefficients k, η > 0, 0 < μ < 2η/k2 , 0 < r <
1/2μ2η − μk2 /β τ/β and τ < 1. Let {xn } be sequence generated by
1
F un , y y − un , un − xn ≥ 0,
λn
xn1
∀y ∈ C,
yn δn un 1 − δn Sn un ,
αn rfxn βn xn 1 − βn I − μαn B yn ,
3.55
∀n ∈ N,
where un Tλn xn . If {αn }, {βn }, {δn }, and {λn } satisfy the following conditions:
i {αn } ⊂ 0, 1, limn → ∞ αn 0,
∞
i1
αn ∞,
ii 0 < limn → ∞ inf βn ≤ limn → ∞ sup βn < 1,
iii 0 < limn → ∞ inf δn ≤ limn → ∞ sup δn < 1, limn → ∞ |δn1 − δn | 0,
iv {λn } ⊂ 0, ∞, limn → ∞ λn > 0, limn → ∞ |λn1 − λn | 0.
18
Journal of Applied Mathematics
∅, where z is the unique solution of variaThen {xn } converges strongly to z ∈ FS ∩ EP /
tional inequality
lim sup rf − μB z, p − z ≤ 0,
n→∞
∀p ∈ FS ∩ EP / ∅,
3.56
that is, z PFS∩EP F I − μB rfz.
Proof . By Theorem 3.1, letting ki 0, σi 0, τi 1 and Si S for i ∈ N, we can obtain
Theorem 3.4.
4. Numerical Example
Now, we present a numerical example to illustrate our theoretical analysis results obtained
in Section 3.
Example 4.1. Let H R, C −1, 1, Sn I, τn τ ∈ 0, 1, λn 1, n ∈ N, Fx, y 0, for
all x, y ∈ C, B I, r μ 1, fx 1/10x, for all x, with contraction coefficient β 1/5,
δn 1/2, αn 1/n, βn 1/4 1/2n for every n ∈ N. Then {xn } is the sequence generated by
xn1 1−
9
xn ,
10n
4.1
and {xn } → 0, as n → ∞, where 0 is the unique solution of the minimization problem
min
x∈C
9 2
x c.
20
4.2
Proof. We divide the proof into four steps.
Step 1. We show
Tλn x PC x,
∀x ∈ H,
4.3
where
⎧x
⎨ ,
PC x |x|
⎩
x,
x∈
/ C,
x ∈ C.
4.4
Since Fx, y 0, for all x, y ∈ C, due to the definition of Tλn x, for all x ∈ H, by
Lemma 2.1, we obtain
Tλn x z ∈ C : y − z, z − x ≥ 0, ∀y ∈ C .
4.5
By the property of PC , for x ∈ C, we have Tλn x PC x Ix. Furthermore, it follows
from 3 in Lemma 2.1 that
EPF C.
4.6
Journal of Applied Mathematics
19
Step 2. We show that
Wn I.
4.7
It follows from 2.9 that
W1 U1,1 τ1 S1 U1,2 1 − τ1 I τ1 S1 1 − τ1 I,
W2 U2,1 τ1 S1 U2,2 1 − τ1 I
τ1 S1 τ2 S2 U2,3 1 − τ2 I 1 − τ1 I
τ1 τ2 S1 S2 τ1 1 − τ2 S1 1 − τ1 I,
W3 U3,1 τ1 S1 U3,2 1 − τ1 I
4.8
τ1 S1 τ2 S2 U3,3 1 − τ2 I 1 − τ1 I
τ1 τ2 S1 S2 U3,3 τ1 1 − τ2 S1 1 − τ1 I
τ1 τ2 S1 S2 τ3 S3 U3,4 1 − τ3 I τ1 1 − τ2 S1 1 − τ1 I
τ1 τ2 τ3 S1 S2 S3 τ1 τ2 1 − τ3 S1 S2 τ1 1 − τ2 S1 1 − τ1 I.
Furthermore, we obtain
Wn Un,1 τ1 τ2 τ3 · · · τn S1 S2 S3 · · · Sn τ1 τ2 · · · τn−1 1 − τn S1 S2 · · · Sn−1
τ1 τ2 · · · τn−2 1 − τn−1 S1 S2 · · · Sn−2 · · · τ1 1 − τ2 S1 1 − τ1 I.
4.9
Since Si I, τi τ for i ∈ N, one has
Wn τ n τ n−1 1 − τ · · · τ1 − τ 1 − τ I I.
4.10
Step 3. We show that
xn1 1−
9
xn ,
10n
4.11
{xn } → 0, as n → ∞, where 0 is the unique solution of the minimization problem
min
x∈C
9 2
x c.
20
4.12
20
Journal of Applied Mathematics
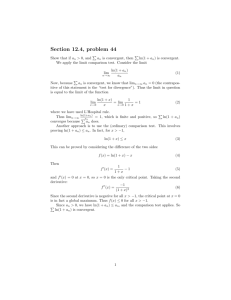
Table 1: This table shows the value of sequence {xn } on each iteration step initial value x1 0.2.
n
1
2
3
4
5
..
.
9
10
..
.
14
15
16
xn
0.2000
0.0200
0.0110
0.0077
0.0060
..
.
0.0032
0.0029
..
.
0.0021
0.0019
0.0018
n
17
18
19
20
21
..
.
26
27
..
.
30
31
32
xn
0.0017
0.0016
0.0016
0.0015
0.0014
..
.
0.0012
0.0011
..
.
0.0010
0.0009
0.0009
In fact, we can see that B I is k-Lipschitzian and η-strongly monotone operator on
H with coefficient k 1, η 3/4 such that 0 < μ < 2η/k2 , 0 < r < 1/2μ2η − μk2 /β τ/β,
so we take r μ 1. Since Sn I, n ∈ N, we have
∞
FSi H.
4.13
FSi ∩ EPF C −1, 1.
4.14
i1
Furthermore, we obtain
∞
i1
Next, we need prove {xn } → 0, as n → ∞. Since yn un for all n ∈ N, we have
xn1 αn rfxn βn xn 1 − βn I − μαn B yn
1−
4.15
9
xn ,
10n
for all n ∈ N.
Thus, we obtain a special sequence {xn } of 3.2 in Theorem 3.1 as follows
xn1 1−
9
xn .
10n
4.16
By Lemma 2.6, it is obviously that xn → 0, 0 is the unique solution of the minimization
problem
min
x∈C
where c is a constant number.
9 2
x c,
20
4.17
Journal of Applied Mathematics
21
0.2
0.18
The value of sequence
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
0
5
10
15
20
25
30
35
Iteration steps
Figure 1: The corresponding graph at x 0.2.
Step 4. Finally, we use software Matlab 7.0 to give the numerical experiment results
and then obtain Table 1 which show that the iteration process of the sequence {xn } is a
monotonedecreasing sequence and converges to 0. From Table 1 and the corresponding graph
Figure 1, we show that the more the iteration steps are, the more slowly the sequence {xn }
converges to 0.
Acknowledgments
The authors thank the anonymous referees and the editor for their constructive comments
and suggestions, which greatly improved this paper. This project is supported by the
Natural Science Foundation of China Grants nos. 11171180, 11171193, 11126233, and
10901096 and Shandong Provincial Natural Science Foundation Grants no. ZR2009AL019
and ZR2011AM016 and the Project of Shandong Province Higher Educational Science and
Technology Program Grant no. J09LA53.
References
1 E. Blum and W. Oettli, “From optimization and variational inequalities to equilibrium problems,” The
Mathematics Student, vol. 63, no. 1–4, pp. 123–145, 1994.
2 A. Moudafi and M. Théra, “Proximal and dynamical approaches to equilibrium problems,” in IllPosed Variational Problems and Regularization Techniques, vol. 477 of Lecture Notes in Economics and
Mathematical Systems, pp. 187–201, Springer, 1999.
3 S. Plubtieng and P. Kumam, “Weak convergence theorem for monotone mappings and a countable
family of nonexpansive mappings,” Journal of Computational and Applied Mathematics, vol. 224, no. 2,
pp. 614–621, 2009.
4 C. Jaiboon, P. Kumam, and U. W. Humphries, “Weak convergence theorem by an extragradient
method for variational inequality, equilibrium and fixed point problems,” Bulletin of the Malaysian
Mathematical Sciences Society, vol. 32, no. 2, pp. 173–185, 2009.
5 P. Kumam and C. Jaiboon, “A system of generalized mixed equilibrium problems and fixed point
problems for pseudocontractive mappings in Hilbert spaces,” Fixed Point Theory and Applications, vol.
2010, Article ID 361512, 33 pages, 2010.
22
Journal of Applied Mathematics
6 T. Chamnarnpan and P. Kumam, “A new iterative method for a common solution of fixed points for
pseudo-contractive mappings and variational inequalities,” Fixed Point Theory and Applications, vol.
2012, article 67, 2012.
7 P. Katchang and P. Kumam, “A system of mixed equilibrium problems, a general system of variational
inequality problems for relaxed cocoercive and fixed point problems for nonexpansive semigroup and
strictly pseudo-contractive mappings,” Journal of Applied Mathematics, vol. 2012, Article ID 414831, 35
pages, 2012.
8 P. Kumam, U. Hamphries, and P. Katchang, “Common solutions of generalized mixed equilibrium
problems, variational inclusions, and common fixed points for nonexpansive semigroups and strictly
pseudocontractive mappings,” Journal of Applied Mathematics, vol. 2011, Article ID 953903, 28 pages,
2011.
9 T. Jitpeera and P. Kumam, “An extragradient type method for a system of equilibrium problems,
variational inequality problems and fixed points of finitely many nonexpansive mappings,” Journal
of Nonlinear Analysis and Optimization, vol. 1, pp. 71–91, 2010.
10 P. Kumam and C. Jaiboon, “Approximation of common solutions to system of mixed equilibrium
problems, variational inequality problem, and strict pseudo-contractive mappings,” Fixed Point
Theory and Applications, Article ID 347204, 2011.
11 P. Kumam and P. Katchang, “The hybrid algorithm for the system of mixed equilibrium problems,
the general system of infinite variational inequalities and common fixed points for nonexpansive
semi-groups and strictly pseudo-contractive mappings,” Fixed Point Theory and Applications, vol. 2012,
article 84, 2012.
12 T. Chamnarnpan and P. Kumam, “Iterative algorithms for solving the system of mixed equilibrium
problems, fixed-point problems, and variational inclusions with application to minimization
problem,” Journal of Applied Mathematics, vol. 2012, Article ID 538912, 29 pages, 2012.
13 P. Sunthrayuth and P. Kumam, “An iterative method for solving a system of mixed equilibrium
problems, system of quasivariational inclusions, and fixed point problems of nonexpansive
semigroups with application to optimization problems,” Abstract and Applied Analysis, Article ID
979870, 30 pages, 2012.
14 G. Marino and H.-K. Xu, “A general iterative method for nonexpansive mappings in Hilbert spaces,”
Journal of Mathematical Analysis and Applications, vol. 318, no. 1, pp. 43–52, 2006.
15 M. Tian, “A general iterative algorithm for nonexpansive mappings in Hilbert spaces,” Nonlinear
Analysis, vol. 73, no. 3, pp. 689–694, 2010.
16 S. Takahashi and W. Takahashi, “Viscosity approximation methods for equilibrium problems and
fixed point problems in Hilbert spaces,” Journal of Mathematical Analysis and Applications, vol. 331, no.
1, pp. 506–515, 2007.
17 Y. Liu, “A general iterative method for equilibrium problems and strict pseudo-contractions in Hilbert
spaces,” Nonlinear Analysis, vol. 71, no. 10, pp. 4852–4861, 2009.
18 K. Shimoji and W. Takahashi, “Strong convergence to common fixed points of infinite nonexpansive
mappings and applications,” Taiwanese Journal of Mathematics, vol. 5, no. 2, pp. 387–404, 2001.
19 Y. Yao, Y. C. Liou, and J. C. Yao, “Convergence theorem for equilibrium problems and fixed point
problems of infinite family of nonexpansive mappings,” Fixed Point Theory and Applications, vol. 2007,
Article ID 64363, 2007.
20 V. Colao and G. Marino, “Strong convergence for a minimization problem on points of equilibrium
and common fixed points of an infinite family of nonexpansive mappings,” Nonlinear Analysis, vol.
73, no. 11, pp. 3513–3524, 2010.
21 H. Iiduka and W. Takahashi, “Strong convergence theorems for nonexpansive mappings and inversestrongly monotone mappings,” Nonlinear Analysis, vol. 61, no. 3, pp. 341–350, 2005.
22 P. L. Combettes and S. A. Hirstoaga, “Equilibrium programming in Hilbert spaces,” Journal of
Nonlinear and Convex Analysis, vol. 6, no. 1, pp. 117–136, 2005.
23 F. E. Browder and W. V. Petryshyn, “Construction of fixed points of nonlinear mappings in Hilbert
space,” Journal of Mathematical Analysis and Applications, vol. 20, pp. 197–228, 1967.
24 S. S. Chang, “Some problems and results in the study of nonlinear analysis,” Nonlinear Analysis, vol.
30, no. 7, pp. 4197–4208, 1997.
25 K. Goebel and W. A. Kirk, Topics in Metric Fixed Point Theory, vol. 28 of Cambridge Studies in Advanced
Mathematics, Cambridge University Press, Cambridge, Mass, USA, 1990.
26 T. Suzuki, “Strong convergence of Krasnoselskii and Mann’s type sequences for one-parameter nonexpansive semigroups without Bochner integrals,” Journal of Mathematical Analysis and Applications,
vol. 305, no. 1, pp. 227–239, 2005.
Journal of Applied Mathematics
23
27 H.-K. Xu, “Viscosity approximation methods for nonexpansive mappings,” Journal of Mathematical
Analysis and Applications, vol. 298, no. 1, pp. 279–291, 2004.
28 S.-s. Chang, H. W. J. Lee, and C. K. Chan, “A new method for solving equilibrium problem fixed point
problem and variational inequality problem with application to optimization,” Nonlinear Analysis,
vol. 70, no. 9, pp. 3307–3319, 2009.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014

![Mathematics 121 2004–05 Exercises 3 [Due Wednesday December 8th, 2004.]](http://s2.studylib.net/store/data/010730626_1-aebc6f0d120abb4f0057af4f44e44346-300x300.png)