Accuracy and Resolution in 2D Resistivity Inversion

Accuracy and Resolution in 2D Resistivity Inversion
by
Jeffrey Z. Snyder
B.S. Geology
Duke University, 1996
Submitted to the Department of
Earth, Atmospheric, and Planetary Sciences in partial fulfillment of the requirements for the degree of
Master of Science in Geosystems at the
Massachusetts Institute of Technology
May 2001
© Massachusetts Institute of Technology 2001. All rights reserved.
Signature of Author.......... .
... .
.
...................................... --
Department of Earth, Atmospheric, and Planetary Sciences
11 May 2001
Certified by .............. % ..................--.-.--.-
Frank Dale Morgan
Professor of Geophysics
Thesis Supervisor
Accepted by.................. ........................ ................. .......... .. .....
Ronald G. Prinn
Chairman, Department of Earth, Atmospheric, and Planetary Sciences
Accuracy and Resolution in 2D Resistivity Inversion
by
Jeffrey Z. Snyder
Submitted to the Department of
Earth, Atmospheric, and Planetary Sciences on 11 May 2001 in partial fulfillment of the requirements for the degree of
Master of Science in Geosystems
Abstract
Two-dimensional resistivity inversion employing regularization enforces a constraint of smoothness that minimizes error and avoids unrealistically complex solutions to the inverse problem. The insensitivity of surface array data to deeper targets typically presents an under-determined problem for solution by the inversion algorithm, and the smoothing function within the algorithm tends to "smear" tomographic imagery. Together, the physical challenges of electrical resistivity as a geophysical method and the numerical challenges inherent in solving the inverse problem introduce errors in the accuracy of 2D resistivity imagery.
It is important to know what surface array geometry will provide data that yields the best results from the inversion. Testing this inversion algorithm on data from several array geometries provides the opportunity to determine the comparative performance of each survey method.
By introducing two types of resistive anomalies and varying their location within a synthetic homogeneous half-space, it is possible to generate synthetic data with a forward model algorithm. The data from each array geometry is then inverted in order to illustrate the accuracy and resolution response of the inversion algorithm. The inversion images are converted into binary images after defining a critical resistivity that describes the contrast between background resistivity and target resistivity. The binary images are used as interpretive tools that allow the user to overcome the "smearing" introduced by the inversion.
Because of its consistent performance from the margins to the center of an array, a left-right sweep geometry combined with a pseudosection geometry appears to be the best choice for a surface array when there is no knowledge of the subsurface structure or resistivity distribution.
The critical resistivity and the area of the anomaly are used to describe the performance of the inversion.
When taken as functions of increasing depth, the critical resistivity decreases and the area of anomaly increases, providing a respective correlation with the current density and the degree of smoothness. Initial results by forming a product of critical resistivity and area suggest that it is possible to approximate the product from the original forward model, but further testing is warranted to provide more conclusive results.
Thesis Supervisor: F. Dale Morgan
Title: Professor of Geophysics
Acknowledgements
I'd like to take the opportunity to thank a few folks who helped me complete this work, and this program:
Professor Dale Morgan, who offered me the latitude to define a problem and run with it. Even to the end, his efforts to excite me about the science involved in this project, and where it was leading, helped give me the added motivation to drive forward with the project.
John Sogade, who provided me with the forward and inversion codes, taught me how to use them, provided me with a sounding board for ideas about the project, and helped me to better frame the problem as I immersed myself in it. John's guidance and editing were invaluable in helping me to provide a cohesive framework for the written report.
Dan Bums, whose positive attitude and flexibility helped me to pull this together right at the end.
Dan was also instrumental in getting me to look at the fundamental science in this project, which made final revisions and alterations so much easier.
My officemates, Jiganesh Patel and Stacy Archfield, who comprised the Geosystems team this year. Successful completion of a program like this requires teamwork, and their support and assistance were fantastic.
Darrell Coles, whose MatLab prowess got me out of trouble on more than one occasion, and whose experience with Geosystems and with ERL made life easier.
I could not have been at MIT without the support of my closest friends and family, so to them I must say thanks: To my parents, who supported me throughout this entire process. To my sister,
Larissa, who kept an eye out for me in the last few weeks of school and knew how to keep things under control at home in South Jersey. And to the Breault family, who offered their home in
Rhode Island as a safe haven that I could visit in order to escape MIT.
Very special, heartfelt thanks must go to my fiancee', Lorna. Her immeasurable strength and support has kept me in the game since I arrived at MIT. Though I'm sure that I pushed the limits of her flexibility and understanding, she stood by to provide a pillar for me to lean on. Thanks so much for being there.
Finally, thank you to the Exxon Mobil Corporation for providing MIT with funding that ultimately paid for my fellowship and allowed me to be here in the first place.
Contents
1 Introduction
1.1 Background
1.2 Objectives
2 Formulation of the Forward and Inversion Problems
2.1 Current density as a function of depth
2.2 The forward model
2.3 Selection of grid discretization
2.4 Formulation of the inverse problem
3 Accuracy and Resolution Testing
3.1 Array geometries to be tested
3.2 Determining the critical resistivity
3.2.1 Binary plotting of inversion images
3.3 Critical resistivity as a function of depth
3.4 Calculating the integrated area of the anomaly
3.5 Smoothness as a function of depth
3.6 The product of per and the integrated area
4 Summary and Conclusions
4.1 Summary of Testing Results
4.2 Future Work
Bibliography
6
10
12
16
22
22
29
35
35
39
47
54
61
68
70
72
Contents (cont.)
Appendices
Appendix 1: Imaging of a 10,000 f-m anomaly. Central location.
Appendix 2: Imaging of a 500 1-m anomaly. Central location.
Appendix 3: Imaging of a 10,000 A-m anomaly. Left flank location.
Appendix 4: Imaging of a 500 9-m anomaly. Left flank location.
Appendix 5: Imaging of a 1 9-m anomaly. Central location.
Al-i
A2-1
A3-1
A4-1
A5-1
Chapter 1
Introduction
1.1 Background
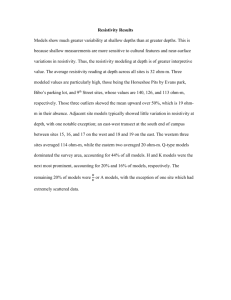
Electrical resistivity surveying techniques have emerged as useful methods for determining earth structure. By applying a known electrical current at various point source locations on the earth's surface, surveyors attempt to infer the subsurface resistivity distribution based on the different voltage potentials measured at the surface. Due to the sometimes wide range of electrical resistivity values that certain materials in the earth possess, this technique provides the surveyor with an effective geophysical method for delineating high contrast features including reservoirs, cavities, and structure in the subsurface.
When conducting 2D resistivity surveying, researchers use linear arrays that consist of electrical current sources and voltage potential receivers. The application of current at the surface interacts with materials, objects, and structure in the subsurface, each with unique resistivity, to produce voltage potential differences along the array. The locations of the voltage potential measurements relative to the current sources dictate what area of the subsurface may possess the resistivity that is effecting the voltage potential measurement. Varying the distance between the current source electrodes and the magnitude of the current can change the current density and the depth of current penetration beneath the array geometry. This in turn can affect the ability of the voltage potential measurements to reflect the true resistivity distribution beneath the array.
Modern interpretation techniques utilize the solution of resistivity forward and inverse problems. In our case the forward problem is the solution to the two-dimensional differential equations that govern the relationship between applied currents and measurable potentials at the surface. Usually, the numerical solution involves finite discretization of the 2D subsurface into a
system of blocks, each with resistivity p, (i =1 to m). The resistivities are called the model parameters. The sole purpose of the inverse problem is to resolve the model parameters that will fit the measured data to a prescribed tolerance and in so doing determine the subsurface resistivity distribution.
Because of the potential to diagnose structure and material properties in the subsurface, resistivity inversion has been investigated for applicability and effectiveness. Mufti (1976) conducted 2-D resistivity inversion using a finite difference model utilizing a non-uniform discretization of the earth. Later, Pelton et al (1978) constructed a faster, more computationally efficient inversion algorithm using ridge regression and least-squares to achieve fast convergence on a solution model that accurately represented the subsurface resistivity distribution. Tripp et al
(1984) expanded work in two-dimensional resistivity inversion by addressing the inverse problem with a non-linear inversion method.
Recent work has attempted to optimize the inversion of surface measurements for the 2-D and 3-D resistivity problems by utilizing computational methods that further increase the accuracy and efficiency of algorithms while solving the inverse problem. The transmission network analogy first developed for use in geophysical applications by Madden (1972) and then adapted by others (Pelton et al, 1978; Tripp et al 1984; Zhang et al 1995) as a numerical modeling approach to the resistivity inverse problem has yielded a computationally efficient inversion algorithm that reduces computing time and minimizes error to produce accurate results.
Unfortunately, several physical and numerical challenges to solving the inverse problem accompany any application of the resistivity method. The decrease in current density with depth leaves the surface data relatively insensitive to deeper targets. The equivalence problem, prominent in potential problems in physics, leads to an inherent non-uniqueness in resistivity
solutions because several subsurface resistivity distributions may be capable of producing equivalent voltage potential measurements at the surface. The non-unique nature of the resistivity inverse problem is further compounded by noisy surface data. This is because a multiplicity of models often fit the surface data to prescribed tolerances. Which of the prescribed tolerances works best is an open question.
Oftentimes, the surface potential measurements (data) are outnumbered by the model parameters. This leads to an underdetermined inverse problem. Though determined or overdetermined problems (where the amount of data is greater than the amount of model parameters) are preferred, the inversion algorithm should be robust enough to accommodate the underdetermined problems. Constraints that enforce requirements for acceptable solutions can also be applied in order to overcome the non-uniqueness of the possible solutions to the inverse problem.
Sometimes data seems to be insensitive to certain parameters or combinations of parameters, which means that these parameters are irrelevant in an inversion sense. Similarly, certain data points seem not to be affected by any of the parameters, so these are unimportant data points. While survey arrays must be optimized to avoid unimportant data points, and models should be chosen to avoid irrelevant parameters, situations often arise where such data points or parameters exist in the formulation of an inverse solution. This leads to an ill-posed inverse problem with consequent numerical instability.
Calculation of the inverse problem can yield several non-unique solutions that minimize error in the forward model, when only one unique resistivity distribution should exist for a given area. Assuming that there is no a priori knowledge of the subsurface resistivity distribution, inaccurate values in the initial resistivity model may cause iterative inversion algorithms to
converge on inappropriate local minimum error solutions rather than global minimum solutions.
As a result, it is possible for inversion methods to yield any number of "rough" solutions that are far more complex than the data or the reality of the earth may demand.
One approach towards overcoming the problem of non-uniqueness has been to apply regularization to enforce a constraint of minimum roughness between nearest neighbors for each iterative solution. This regularization pushes the inversion algorithm towards the simplest model demanded by the data. It is equivalent to selecting a certain class of solution with prescribed properties from amongst a variety of non-unique solutions (Shi 1998). In electromagnetic sounding inversion, Constable et al (1987) coined the term "Occam's inversion" because their inversion algorithm sought the simplest possible model demanded by the data. Their justification was that "the real profile must be at least as rich as the profile found, but never less complex in structure." LaBrecque (1996) later adapted this concept to inverting crosshole resistivity data.
While regularization yields simple, low error solutions, the affect of smoothing tends to
"smear" the results such that sharp boundaries are avoided if at all possible. There is then a loss of accuracy and resolution in the subsurface resistivity model that becomes evident in the resulting imagery created by the inversion.
The spatial distortion that accompanies this technique hinders appropriate interpretation of subsurface imagery. In order to more effectively utilize the inversion method and its output imagery, users should possess a perspective whereby they can expect the accuracy and resolution behavior of the method in response to data produced by different anomaly types and locations within the subsurface.
1.2 Objectives
To date, there has been little attempt to test this inversion method and standardize an understanding of its accuracy response to different targets and locations relative to the surface survey. Because of the physical challenges inherent with the resistivity method and the side effects of overcoming the numerical challenges in the inverse problem, there are two primary sources of inaccuracy and resolution loss. First, the weakening current density as a function of depth and the insensitivity that it invokes in surface potential measurements makes it difficult to
"illuminate" relatively deep resistive or conductive anomalies within the subsurface. Second, the nearest-neighbor approximation and smoothing introduced by the regularization of the inverse problem creates a smearing and homogenization of deep anomalies. Understanding the roles that these two factors play in effecting an accurate and well-resolved response from the resistivity inverse problem will provide a perspective with which to interpret resistivity imagery, and perhaps provide an avenue for future optimization of the inversion method.
In order to illustrate the accuracy and resolution behavior of this resistivity inversion technique, this investigation will provide a catalog of images produced by the inversion algorithm in response to synthetic data from two resistive anomaly types across a variety of locations. After defining a critical threshold resistivity value in the imagery, we will use that threshold value to create binary images as an added interpretive tool. The threshold value will also be used to determine the integrated area of a resistive anomaly, enabling simultaneous comparison of the current density, the degree of smoothing, and the integrated area of the anomaly as a function of depth. This will illustrate how the physical challenges of the electrical
method and the numerical challenges of the inverse problem combine to affect the overall accuracy performance of the inversion.
Finally, the testing regimen will be conducted for several surface array geometries, expanding upon similar work conducted by Shi and Morgan (1997), in order to exhibit how different data collection methods might provide more complete data to make the inverse problem better determined. Because real-world applications provide little real data or imagery with which to verify the accuracy of the inversion, the approach used here is to create synthetic surface data using an algorithm that incorporates known electrical currents and a prescribed resistivity distribution to solve the forward problem and produce surface potential measurements. The synthetic data will then be utilized in the algorithm to solve the inverse problem, and the resulting resistivity model can be compared with the initially prescribed model. By varying the locations and the magnitudes of the prescribed resistivity anomalies, it is possible to assess some standard behaviors of the algorithm so that we may gain a better understanding of the limitations of the method and thus be better prepared to interpret imagery produced by this technique.
Chapter 2
Formulation of the Forward and Inverse Problems
2.1 Current density as a function of depth
The ability of current to penetrate the subsurface, travel through the earth, and return to the surface to yield surface data measurements seriously affects the ability of the any inversion method to solve for deep resistive anomalies. A consideration of the 1-D case for a point current source on the surface of a homogeneous isotropic earth illustrates how the voltage potential at a location within the earth decreases with respect to increasing depth. Given Ohm's Law,
V= IR (2.1) where V is the voltage potential at a given point, I is current flowing through the point, and R is the resistance of the path. This can be expanded to consider the resistivity of the material in the current path and the distance between the source and the point of interest, yielding vIp
1
V =
2;r r
(2.2)
Next, consider the 2-D case where there are two current source electrodes placed on the surface.
Figure 2.1(a) illustrates an example of a pair of current source electrodes and receiver potential electrodes. The voltage difference between any two points on the surface, as a result of the current flowing from one electrode to the other, can be given by
AV= -
2rct r, r2
(2.3) r3 r4
Where AV is the voltage potential difference between two points, P, and P
2
. I is the current applied at each current source C
1 and C
2
, and p is the resistivity of the subsurface.
Power
Figure 2.1(a). A sample current electrode pair and voltage potential pair, used to illustrate equation (2.3). Reproduced from (Telford, 1990).
Power
Figure 2.1 (b). Solving for current density at depth with a dipole source at the surface.
Reproduced from (Telford 1990).
Given these relations, we can also determine the horizontal current density within a homogeneous medium with resistivity p as
Ji = (-)
P &
(2.4) x=
I ){x (x-L)
2;r r,'r
(2.5)
(Refer to Figure 2.1(b) for a graphic representation of (2.5)) If we wish to find the current density at a point P in the subsurface at a depth of z, and we assume that P lies on a line perpendicular to the midpoint between the current sources, then (2.5) becomes
J = (
)
2; {(z
2
+L)2
4.
3>
(2.6) where L represents the distance between the current sources and I represents the current. Holding the current I constant, we can solve for J, (in amperes/m 2 ) as a function of z for various values of
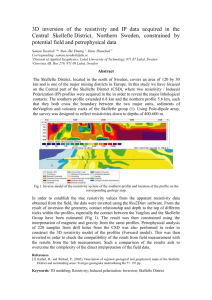
L. Figure 2.1(c) illustrates how the current density varies with L and z. The magnitude of the current density at shallow depths is highest when the current source electrodes are closest together. However, it is possible to increase the current density at depth by increasing the distance between the current sources. The cost of achieving greater penetration is a loss of current density in the shallow subsurface, and in all cases the general trend is for current density to decrease as a function of depth.
-0
-10'
Current Density
I =I
10 10 10 log Current Density, J (Mps/m
2 )
10', 10
Figure 2.1(c). Current density as a function of depth, with I (current) being held constant.
2.2 The forward model
Expansion of Ohm's Law into the three-dimensional case yields a system of nonlinear differential equations that describe the relationship between applied surface currents, subsurface resistivity, and surface voltage potential measurements. The system of equations is
V V(x, y, z) = -p(x, y, z)J(x, y, z) (2.7)
V -J(x, y, z) = I(x, y, z) (2.8) where again V represents the voltage potential, p is the resistivity, J is the current density, and I is the current.
The resistivity forward model has a transmission network analog, first developed in electrical engineering but later adapted to geophysical applications by Madden (1972). It consists of network nodes, boundary nodes, and impedance branches. Based on this transmission network model, the resistivity forward problem described by Equations (2.7) and (2.8) below can be converted to a linear set of algebraic equations using Kirchoff s current law, which is then solved using a bi-conjugate gradient algorithm. The schematic in Figure 2.2(a) exhibits the construction of the transmission network. Note that for the geophysical resistivity problem, current sources can be placed at network nodes, and voltage values are placed at nodes located on the top center of each discretized block within the transmission network (Zhang et al 1995 and Shi 1998).
These expressions can then be solved numerically for the forward model by using a discretized 3-D model of the subsurface. The 2-D forward model algorithm used in this investigation uses a three-dimensional discretized subsurface region that is always three elements thick in the y-direction while the x and z ranges are specified by the user and the middle slice is extracted to consider the 2-D result.
z
*
network node o
boundary node
Figure 2.2(a). A schematic of the transmission network analog as applied to the resistivity problem. Reproduced from (Zhang et al 1995).
In order to perform the testing and analysis of the resistivity inversion algorithm, it is necessary to produce synthetic data from a known field of structure. In this case, the forward model utilizes a 15 x 30 grid of blocks to represent a discretized subsurface cross-section. Each block represents a spatial value of size and resistivity as prescribed by the user. For the purposes of this investigation, each grid column entry will be 1 m (meter) specifying the width of the block, and each row grid entry will be 1 m specifying the thickness of each block. However, the first and thirtieth columns will possess a width of 150 m and the second and twenty-ninth columns will possess a 50 m width in order to maintain appropriate boundary conditions that will improve the accuracy of the forward model results. Figure 2.2(b) illustrates this spatial grid. A
100 Q-m homogeneous body will represent the background resistivity of the field of interest. The forward model allows users to choose the number of anomalies to introduce into the crosssection; however, this study will utilize a target block of dimensions 2 m high by 4 m wide with varying resistivity and/or position.
The forward model algorithm requires the user to provide an input data file that represents the survey geometry. Figure 2.2(c) shows an example of a dipole-dipole pseudosection data set, and Figure 2.2(d) is an example of a left-right sweep data set developed at the Earth Resources Laboratory (MIT).
The user possesses the flexibility of creating synthetic data sets that mimic selected survey geometries and of creating data sets in response to varying subsurface resistivity distributions. It is important to note that, in the physical sense, a variety of subsurface resistivity distributions could be constructed to yield identical surface data sets. This problem of equivalence will take on an even greater role of importance when we consider the inverse problem and the difficulties that arise in solving a problem with non-unique solutions.
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
150 50 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 50 150
Figure 2.2(b). Spatial grid employed in forward modeling algorithm.
Total number of electrode source pairs
Initial source pair locations
Number of receiver pairs
Receiver pair locations
Voltage (mV) Current (mA)
3
6
7
4
5
8
9
9
10
6
7
8
2
4
5
4 -4.08416
5 -1.67314
6 -0.83572
7 -0.47804
8 -0.29642
9 -0.19191
10 -0.12718
3 7
5 -4.08416
6 -1.67314
7 -0.83572
8 -0.47804
9 -0.29642
10 -0.19191
11 -0.12718
1
1
1
1
1
1
1
1
1
1
1
1
1
1
Figure 2.2(c). Example offorward model data format for dipole-dipole pseudosection array.
Total number of electrode source pairs
Initial source pair locations
Number of receiver pairs
Receiver pair locations
14
15
16
10
11
12
13
6
7
8
9
2
3
4
5
Voltage (mV) Current (mA)
3 4
3 -4.08416
4 -1.67314
5 -0.83572
6 -0.47804
7 -0.29642
8 -0.19191
9 -0.12718
10 -0.10153
11 -4.08416
12 -1.67314
13 -0.83572
14 -0.47804
15 -0.29642
16 -0.19191
17 -0.12718
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
Figure 2.2(d). Example offorward model data format for dipole-dipole left-right sweep array.
(Note: Potential values are not representative of actual data. Figure has been provided only to display format type.)
2.3 Selection of grid discretization
In order to conduct tests on the behavior of the inversion, it was necessary to establish an appropriate grid discretization for use in the forward model. In this investigation, we have chosen the simplest approach by using equivalent grid discretizations in both the forward and inversion grids. The forward model produces data based on a 15 x 30 element grid as illustrated in Figure
2.2(b), where each grid element within the boundaries is 1 m by 1 m in size. The inversion algorithm solves for model parameters based on the same grid discretization.
2.4 Formulation of the inverse problem
For the purposes of numerical calculations, the subsurface of the earth is discretized into a grid similar to that shown in Figure 2.4(a). Each block in the grid represents a resistivity value and a spatial dimension, such that the discretized subsurface electrical resistivity represents the parameters of the model, m, that are to be inverted. The data, d, constitutes all of the measured voltage-current pairs that are taken along a survey line at the surface.
The non-linear resistivity inverse problem requires solution of an iterative linear system of equations. This system of linear equations may be ill-posed because the initial guess for a solution in the iterative inversion algorithm may be far from the truth, and some of the data and/or model parameters may be irrelevant or unimportant to the solution of the inverse problem.
Without a priori knowledge of the subsurface structure forcing the inversion to converge on a particular solution, it would be quite possible for the inversion to yield an unrealistically complex, or "rough" solution. Though such a solution may be a minimum error result, the complexity or roughness may be unnatural or perhaps more complex than the original data demands. In order to overcome this problem of non-uniqueness, the inversions are designed to
Surface data observations, d
-
I
I I I
I -, -, -I-
I I
1-I-u
I
-
I I I I
I ~-
I-I-I-I
I I
I -
4-
-
m
-
-
-
-
-
4-
-
------
model parameters, m representing resistive blocks within the discretized subsurface.
4.
E~E E~E
-
Figure 2.4(a). Schematic comparison between surface data measurements and model parameters.
seek a low error solution while also enforcing a constraint of smoothing on the inversion.
Assuming that simplest solutions and the structures they represent are appropriate for geophysical interpretation of high contrast structure in the real earth, the nearest-neighbor regularization imposes a condition of uniqueness on the solution to the inverse problem by requiring that it be the simplest low-error solution demanded by the data (Shi 1998).
To see how this regularization can be imposed, first consider a generic linear algebraic case:
d =Gm + e (2.9)
For the resistivity inverse problem, d represents the surface data measurements (voltage potentials), G represents the forward model that relates current, voltage, and resistivity in space;
m represents the unknown resistivity distribution in the subsurface; and e is the misfit error.
The Tikhonov regularization requires the definition and minimization of a function that combines data misfit and the roughness of the model:
T = (d
-Gm))
T
R -'(d -
Gm))+ r(m - m )
T
L L(m - mo) (2.10) where ![ function that must be minimized, R is the data covariance matrix, r is the regularization parameter, and L is a linear operator (Tikhonov 1977). In (2.10), the first term represents the data misfit produced by the model and the second term represents the "stabilizing functional" that defines the spatial roughness of the model parameters so that (2.10) can be redefined as
T = s, + rs2 (2.11)
The inversion algorithm employs a non-linear conjugate gradient method that iteratively attempts to find a solution model to the inverse problem while minimizing the function V. Each successive iteration varies the value of the regularization parameter z according to the behavior
of .
For relatively high values of , s, dominates the behavior of the algorithm in attempting to minimize . For low values of r, sj dominates the inversion algorithm.
If [ approaches a minimum value for both the first and second terms, the algorithm will stop iterating in order to prevent it from relaxing the smoothness constraint while in pursuit of even lower error solutions. This ensures that the algorithm converges on the smoothest, low-error solution. Figure 2.4(b) illustrates the behavior of V, z , s
1
, and
S2 with advancing iterations.
While the smoothing constraint yields a simple, low error solution, the effect of the smoothing also tends to "smear" the results, such that there is a loss in accuracy and resolution that is evident in the subsurface imagery attained by the inversion. Figure 2.4(c) is a comparison between imagery from a forward model and the related inversion. The top image is a graphic representation of a single resistive block anomaly that was used to create synthetic surface data in the forward model algorithm. The bottom image is the graphic representation of the inversion results. The inversion tends to smear the anomaly downward, and it changes the values of the resistivity in the target. The smearing in the imagery illustrates the effect that the nearestneighbor smoothing constraint has when producing the simplest model. The decrease in resistivity values can be attributed to both the nearest neighbor smoothing during the inversion and the increasing insensitivity of the surface data to relatively deeper targets.
Because of this spatial distortion, it is important for users of this inversion technique to understand the accuracy and resolution response of the inversion based on the current density provided by different survey geometries and the location of anomalies within the subsurface.
The design of this inversion algorithm for 2D resistivity produces a distinctive manifestation in the output imagery, in that anomalies in the 'inverted' images are smeared as a result of regularization. When the Tikhonov regularization imposes the constraint on smoothness
1 2 3 4 5 6
Iteration
7 8 9 10 11
Figure 2.4(b). An example of the behavior of W, r, si, and s
2 for an inversion of synthetic data.
Forward: Resistivity (Ohm-m)
0
2
4
E 6
10
12
14
0
'M
8
10
12
14
0
0
2
4
5 10 15
Distance (m) inversion: Resistivity (Ohm-m)
20 25
5 10 15
Distance (m)
20 25
10000
8000
6000
4000
2000
7000
6000
5000
4000
3000
2000
1000
Figure 2.4(c). A comparison between a synthetic forward model (top) and the modelproduced by inversion (bottom) of the data generated by the forward model.
in this inversion method, the inversion creates a smearing of resistivity anomalies in the imagery that can lead to misinterpretation by the user. This smearing effect is further compounded by the decrease in data density and sensitivity for deeper targets. Due to the physics that govern the flow of electrical current in the solid earth, the current density from surface sources decays with depth. This combination of regularization and data density distorts accuracy and resolution with increasing depth.
Sasaki (1992) undertook a resolution analysis of an inversion method that dealt with borehole and surface potential measurements. The analysis he presented focused primarily on factors internal to the inversion algorithm, such as grid discretization and damping coefficient
(T), with some investigation into electrode placement within the survey array. However, systematic testing of the inversion in response to resistive anomalies that vary with location and magnitude has yet to be done, and in this case may yield some consistent qualitative standards of interpretation and performance, particularly when compared with the amount of smoothing imposed by the inversion and the current density. Furthermore, there may also be ways to increase the accuracy of the inversion by providing it better data in order to better determine the inverse problem. Applying different array geometries may yield better current density or greater sampling at depth. The remainder of this investigation will consist of a series of simple yet elegant analytical tests that will qualify the accuracy behavior of the inversion in response to different anomalies and array geometries.
Chapter 3
Accuracy And Resolution Testing
3.1 Array geometries to be tested
To illustrate the potential for improvement in inversion results, five surface array geometries will be used to produce synthetic data from the forward model. Recall that our forward model will utilize a 15 x 30 discretized grid to represent the subsurface, and the first, second, twenty-ninth, and thirtieth columns are use only to provide boundaries to the grid. Also, referring back to the transmission network analogy reminds us that voltage values can be assigned to the top center of each block and current values can be assigned to any network node.
For the purposes of creating synthetic data sets, current source locations and receiver locations can be at any location between 3 and 28.
In this case, the dipole-dipole pseudosection array uses 23 current source pair locations.
Starting at the extreme left side of a field to be imaged, two adjacent electrodes (positions 3 and
4) are selected as the current source pair. Then, the receiver pairs are staggered across the remainder of the electrodes along the survey line, with the terminus being the
2 8th position. The source pairs are then shifted one position to the right, and again the receiver pairs extend from the source pair to the terminus. With this array geometry, a complete survey has a total of 276 potential measurements. Figure 3.1 displays a simple schematic of the survey geometry.
The left-right sweep begins with the current source pair placed at the extreme ends of the survey line, such that one current electrode starts at the 3 position and the other begins at the 28 position. Potential measurements are then taken at all of the electrode positions between the current source electrodes. After the measurements are taken, the left hand electrode is then shifted to the right so that the current source electrodes are at the 4 and 28 positions. Again, the
measurements are only taken between the source electrodes. This procedure continues until the survey has utilized a total of 50 source pair locations for a total of 552 measurements. Figure
3.1(b) is a schematic of the left-right sweep.
The dipole-dipole middle sweep begins with the current source electrodes paired at the extreme ends of the array line. The mid-point of the line is designated as an axis of symmetry.
All receiver electrodes are paired so that they are equidistant from the mid-point of the array.
This procedure requires a total of 13 source pair locations for a total of 156 measurements.
Figure 3.1(c) is a schematic of the middle-sweep.
The final two arrays to be tested will be hybrids of those mentioned. One array will be a left-right-pseudo, the other will be a left-right-middle sweep. For example, adding the data collected from a left-right-sweep survey to a pseudosection survey gives us the left-right-pseudo hybrid.
Figure 3.1(d) is a test matrix that describes the different parameters that will be varied in the testing of the array geometries.
r&"ti
r__3
4AW*b
V
4
4
A,
4
V
4 4
.
4
1*0
,
4
9 4
9, n=1 n=2 n=3
Figure 3.1(a). The dipole-dipole pseudosection array geometry. The current source dipole is located at the top left hand side of the survey line, and the receiver dipoles are paired to the right. Reprinted from (Shi 1998).
1 2 3
1 2 3
1 2 3 rtv V1
Figure 3.1(b). The left-right sweep. The current source electrodes begin at the extreme ends of the survey geometry, and all of the receiver pairs are between the source pairs. The left hand electrode is then swept to the right towards the right electrode. The process is repeated in order to sweep the right-hand electrode to the left. Reprinted from (Shi 1998).
Figure 3.1(c). The middle-sweep. The current source electrodes are paired, beginning at the extreme ends of the survey geometry. Receiver pairs are centered, symmetric to the mid-point of the array line. The source electrodes are then swept towards the center of the array line.
Array Geometry
Varied
Pseudosection
Left-Right Sweep
Middle Sweep
Left-Right-Pseudo
Left-Right-Middle
2D Resistivity Inversion Test Matrix
Anomaly Type Anomaly Size
Varied Constant
10,000 92m 4 m wide x 2 m thick
500 Qm
1 Q-m
Background Resistivity: Constant, 100 Q-m.
Anomaly Depth
Varied
1 m to 8 m depth
Location
Varied
Center of grid
Left flank of grid
Figure 3.1(d). Matrix for varied parameters in 2D resistivity inversion accuracy testing.
Note that the 1 -m has only been tested for centrally located anomalies.
3.2 Determining the critical resistivity
In order to determine the size and magnitude of the resistive anomaly produced by the inversion algorithm, it is necessary to define a threshold resistivity value for each model that the inversion produces. This critical resistivity, per, can be used as a baseline to create binary plots and integrated area plots, and it can also be used as a proxy for the decay of resistivity values that can be witnessed for deeper targets in the forward model. Using the definition provided by Beard and Morgan (1991) for resistive anomalies set against relatively conductive backgrounds, x= x= log
10
Pmax log
10
Pmin
Ax = (xh -x,)/3
Pcr =1 OXh
(3.1)
(3.2)
(3.3)
(3.4)
For conductive anomalies set against relatively resistive backgrounds, the solution for critical resistivity becomes
Pcr = lOx+
(3.5)
The calculation of the critical resistivity value contains information about the actual resistivity contrast in the image that can be used as a simple descriptor of the accuracy in resistivity magnitude that the inversion produces.
3.2.1 Binary plotting of inversion images
With our definition for the critical resistivity, we conduct an element-wise comparison of the model parameters in the inversion grid to Per. Values in the inversion grid that are greater than Per will are assigned the value of 1 (resistive), and those values that are less than
Per received a value of 0 (conductive). The resulting binary plots were then plotted on figures that included
the original forward model resistivity distribution that was used to create synthetic data, and the solution model that was found by the inversion.
All of the figures for these tests can be found in the appendices. In each appendix, there are test results for each of the five arrays (pseudosection, left-right sweep, middle sweep, leftright-pseudo sweep, and left-right-middle sweep). The appendices have been ordered according to the following test examples: Appendix 1 possesses test results for a 10,000 Q-m target that was located near the surface, along the midpoint of the array line. Appendix 2 is for a 500 Q m anomaly located near the surface along the midpoint. Appendices 3 and 4 are for 10,000 2-m and 500 Q-m targets, respectively, that were located near the left margin. Appendix 5 possesses results from the 1 9-m case for centrally located anomalies.
Based on the inversion images and the binary plots in Appendices 1 and 2, it would appear at first glance that the pseudosection array actually produced better imagery than the leftright sweep, particularly for the anomalies on the centerline. The left-right-pseudo also produced an accurate response that was comparable to the pseudosection alone. For a shallow target, the inversion placed the anomaly at the appropriate depth with the appropriate size in response to both the pseudosection data (Fig. Al-1) and the left-right-pseudo data (A 1-4), but there appears to be some loss of resolution in the left-right sweep test case (Fig. A1-2). As evidenced in the binary plots, the left-right-middle sweep (Fig. A 1-5) was nominally less effective than the pseudosection and left-right-pseudo sweep, particularly for the 10,000 Q m target. The middle sweep was very inaccurate for all centerline targets (Figs. Al-3, Al-8, A2-3, A2-8), producing heavily smeared anomalies and significantly reduced resistivity values.
If we recall from Figure 2.1(c), the current density was greatest at the surface when L, the distance between the current source electrodes, was minimized. This explains the comparatively
better performance of the pseudosection array in response to centerline shallow targets, as the distance between current source electrodes was always 1 meter. The increased current density in shallow areas beneath the midpoint of the array made the surface potential measurements more sensitive to resistive targets located there.
The images in Appendices 3 and 4 represent repetitions of the same experiments except that the anomaly was located along the left margin of the subsurface grid. The utility of the leftright sweep, and particularly the left-right-pseudo sweep becomes immediately apparent by their ability to better resolve anomalies along the flanks. The left-right-pseudo sweep also produced a closer approximation of the magnitude of resistivity.
The pseudosection array, with its apparently triangular capture zone, completely lost accuracy and the ability to resolve any targets near the margins. The inversion rendered tear-drop shaped anomalies smeared down and towards the center and much lower resistivity values in response to data from the pseudosection array. The middle-sweep appeared to be very inaccurate when applied alone; the results it provided permitted the inversion to render anomalies on both flanks when only one target was introduced in the forward model. It would appear that the leftright-middle sweep was not made more effective by the added presence of the middle-sweep data.
By these images, we can see how the different array geometries used current source placement and voltage receiver placement to determine current density and subsurface sampling.
In the case of the pseudosection geometry, it accurately (relative to the other geometries) captured shallow resistive targets near the centerline, but the geometry limited its ability to sample the subsurface completely on the flanks.
Appendix 5 contains images from tests of a conductive (1 t-m) target set against a relatively resistive background. The imagery tends to be much more difficult to interpret, as the inversion tended to return a more smeared anomaly than we saw in the cases of resistive targets.
While the resistive targets tended to be underestimated by the inversion, the conductive targets tended to be overestimated in magnitude. However, the determination of the critical resistivity value and the creation of the binary plot appeared to be a relatively robust approach towards interpreting the imagery for the conductive targets. The performance of the inversion appeared to be consistent with that witnessed for the resistive targets with one notable exception: though the left-right-pseudo sweep offered the best performance, the left-right sweep outperformed the pseudosection for the conductive target.
To summarize, the performance of the inversion response to the following surveys geometries can be ranked as follows:
For capturing a resistive anomaly near the array midpoint
1. Left-Right-Pseudo Sweep
2. Pseudosection
3. Left-Right Sweep
4. Left-Right-Middle Sweep
5. Middle Sweep
For capturing a resistive anomaly near the array margins
1. Left-Right-Pseudo Sweep
2. Left-Right Sweep
3. Left-Right-Middle Sweep
4. Pseudosection
5. Middle Sweep
For capturing a conductive anomaly near the array midpoint
1. Left-Right-Pseudo Sweep
2. Left-Right Sweep
3. Left-Right-Middle Sweep
4. Pseudosection
5. Middle Sweep
Overall Choice: Left-Right-Pseudo Sweep
3.3 Critical resistivity as a function of depth
It is convenient that pc, is determined by the resistivity values within the solution to the inverse problem because the critical resistivity can also be used as proxy for the behavior of the inversion. The response of the inversion tends to yield decaying resistivity values as a function of depth; the full field plots in the appendices exhibit this behavior. However, plotting per as a function of the depth of the anomaly can yield insight into the decay in resistivity that the inversion produces. The decay in resistivity is in response to the lack of sensitivity in the data for deeper targets. A plot of pr for a 10,000 Q-m and 500 &-m, centrally located anomaly in response to pseudsection array data can be found in Figure 3.3(a). A similar plot for the inversion results borne from left-right sweep data can be found in Figure 3.3(b), and 3.3(c) refers to the left-right-pseudo sweep. All experiments were repeated for anomalies on the flanks, and the results are plotted in Figures 3.3(d)-(f).
(Further testing will be performed on the 10,000 Q-m and 500 Q-m targets. The middle and left-right-middle sweeps will be omitted from further testing. The results in Section 3.2 suggested that the left-right-middle sweep was not competitive with the left-right-pseudo sweep, and the middle sweep is quite inaccurate as a stand-alone survey.)
Recall that in Figure 2.1(c), we illustrated how current density decays with increasing depth. In response to data from each array geometry, the critical resistivity value decays with increasing depth, though the 500 9-m cases decay more gradually than the 10,000 Q-m cases. It appears that the critical resistivity shares a directly proportional relationship with the natural behavior of current density in the subsurface, but the rate and magnitude of decay of the critical resistivity is unique to the magnitude of the actual target.
In comparing the quality of the results for these three array types, it appears that the leftright-pseudo sweep data produced consistently better results, particularly because pcr reached an absolute maximum in response to the left-right-pseudo sweep data and because per was consistently higher as a function of depth. The significance of this higher critical resistivity value is that it describes, essentially, a higher magnitude of contrast between the target anomaly and the background and thus a more accurate response. Physically, this is most likely a function of the increased current density that the larger distances between current source electrodes tend to produce for deeper targets.
It is interesting to note that the pseudosection produced a critical resistivity value for the
500 Q-m at 1 m that was a near match for the critical resistivity value in the forward model
(Figure 3.3(a), lower plate). These results agree with the concept that the shorter dipole lengths in the pseudosection array produced higher current density at shallow depths, thus providing more current to interact with resistive targets in the shallow subsurface.
When targets on the margins were considered, the results show that the pseudosection data produced a rapid decay for per. The left-right sweep and the left-right-pseudo sweep produced more gradual decay with increasing depth, consistent with the results from Section 3.3 that indicated better capture in the margins by the left-right sweep and its hybrid, the left-rightpseudo sweep.
10,000 ohm-m Anomaly
E
S-2
0 c -3
IL
.- 6
C, --
500
-1
E
0-
-3 F
0-5
.r -4
1L
CD-
-8'
10 0 120 140 160
1000 1500
Resistivity (Ohm-m)
500 ohm-m Anomaly
180 200 220
Resistivity (Ohm-m)
2000
-
Inversion Rho ocr
__Forward
Rhoc
240 260 280
2500
300
Figure 3.3(a). Critical resistivity as ajfunction of depth. The inversion algorithm was run using synthetic dipole-dipole pseudosection data generated in response to the two centrally located anomaly types. Notice the behavior of the critical resistivity with respect to depth, and the similarity with current density as a function of depth (Figure 2.1(c)).
10,000 ohm-m Anomaly
-1
$ -2-
E
0-
-
4
0-5 o -
Q.
-8
0-
-8 L
0
500
-1
E
0
-3
-
-I
0-5
10 0 120
-r
-
140 160
1000 1500
Resistivity (Ohm-m)
500 ohm-m Anomaly
180 200 220
Resistivity (Ohm-m)
2000
-_-- Inversion Rhocr
Forward Rhoor
240 260
2500
-
-
280 300
Figure 3.3(b). Critical resistivity as afuinction of depth. The inversion algorithm was run using synthetic left-right sweep data generated in response to the two centrally located anomaly types.
Notice the behavior of the critical resistivity with respect to depth, and the similarity with current density as a function of depth (Figure 2.1(c)).
10,000 ohm-m Anomaly
-1
-
E
0
C
-3
IL
5
0 c 6- o -7
-8
-
0 500 1000 1500
Resistivity (Ohm-m)
500 ohm-m Anomaly
2000 2500
-6
-7
-81
10
0 120 140
-r
160 180 200 220
Resistivity (Ohm-m)
--
___ Inversion Rhocr
Forward Rhoor
240 260 280
-
300
Figure 3.3(c). Critical resistivity as a function of depth. The inversion algorithm was run using synthetic left-right-pseudo sweep data generated in response to the two centrally located anomaly types. Notice the behavior of the critical resistivity with respect to depth, and the similarity with current density as a function of depth (Figure 2.1(c)).
10,000 ohm-m Anomaly
E
0-
'
-2
-3 o -4
I-5
.
5-6
0 -
500 1000 1500
Resistivity (Ohm-m)
500 ohm-m Anomaly
I I I F
2000 2500
E
0-
-2
-3
Inversion
Rhoc
Forward Rho
0-5
-6
8-7
-8
' 0
I
120 a
140 a
160
I-
180 200 220
Resistivity (Ohm-m)
240 260 280 300
Figure 3.3(d). Critical resistivity as afunction of depth. Dipole-dipole pseudosection data in response to margin-located anomalies.
-1
E
S-2
0c -3
0-5
0 -6
(.
o -7
-8
)
-1
E
S-2
0
C -3
500
10,000 ohm-m Anomaly
1000 1500
Resistivity (Ohm-m)
500 ohm-m Anomaly
2000 2500
0 -6 o -7
-8 i
0 120
-
140 160 180 200 220
Resistivity (Ohm-m)
-_~-
_
Inversion Rhoor
Forward Rho or
240 260 280 300
Figure 3.3(e). Critical resistivity as a
function
of depth. Left-right sweep data in response to margin-located anomalies.
10,000 ohm-m Anomaly
-1
E
0
C
-3
0 -5 o.
0.
o -7
-8
500 1000 1500
Resistivity (Ohm-m)
500 ohm-m Anomaly
2000 2500
E
E-2
0 c -3
0-5
.-
0.
c-7
6
-810
100 120 140 160 180 200 220
Resistivity (Ohm-m)
240 260 280 300
Figure 3.3(f). Critical resistivity as a finction of depth. Left-right-pseudo sweep data in response to margin-located anomalies.
3.4 Calculating integrated area of anomaly
Using the critical resistivity values and the binary plots created from the inversion results, it is also possible to characterize the smoothing imposed by the algorithm by integrating the area of the anomaly and plotting it as a function of depth. Figures 3.4(a)-(c) are integrated area plots based for anomalies produced by the inversion in response to 10,000 Q-m and 500 Q-m, centrally located anomalies that were used to produce synthetic pseudosection array, left-right sweep, and left-right-pseudo sweep array data, respectively. Figures 3.4(d)-(f) are integrated area plots based on targets located near the margins.
Notice that as depth increases in each case, and as pcr decreases in Figures 3.3(a)-(f), the area of the anomaly increases due to smearing. (This inversely proportional relationship between the critical resistivity and the integrated area will be addressed in section 3.6.)
This smearing is notably more erratic for the margin-located anomalies that were imaged with pseudosection data, but such behavior is expected when compared with the results in
Sections 3.2 and 3.3, further reinforcing the concept that pseudosection subsurface illumination near the margins is poor when compared to the left-right sweep arrays.
10,000 ohm-m Anomaly
-1-
0-3
-32
- -
C -6a) o -7
-8
-
0
E
S-2 -
0-
C
-3
4
LL
.6-
Q.
$ 7-
-8 -
0
10 20 30 40
500 ohm-m Anomaly
50 60
10 20 30
Area (m3 )
40 50 60
Figure 3.4(a). Integrated area of anomaly. The anomaly size is calculated based on the size of the binary plot (created with the critical resistivity value Pcr ). The inversion was run in response to synthetic dipole-dipole pseudoseclion array data generated for centrally located anomalies.
10,000 ohm-m Anomaly
-1-
E
0-
C-3
S-2-
0-5-
0-6-
-7-
-8 L
5 10 15 20 25 30
Area (m 3)
35
500 ohm-rn Anomaly
40 45 50 55
-1
-
E
$ 2-
0-
C
-3
0-5-
0-6o -7
-8 -
0 10 20 30
Area (m3)
40 50
Figure 3.4(b). Integrated area of anomaly. The anomaly size is calculated based on the size of the binary plot (created with the critical resistivity value p,). The inversion was run in response to synthetic left-right sweep array data generated for centrally located anomalies.
10,000 ohm-rn Anomaly
-1
-
N -2-
E
0-
-3 a.
U-
-54 o -7
-8
-
0
-1
-
E
S-2 -
0-
-3
5a.
~ 6
8 7-
-8
-
0
10 20 30
500 ohm-m Anomaly
40 50
10 20 30 40 50 60 70
Figure 3.4(c). Integrated area of anomaly. The anomaly size is calculated based on the size of the binary plot (created with the critical resistivity value Pcr). The inversion was run in response to synthetic left-right-pseudo sweep array data generated for centrally located anomalies.
10,000 ohm-m Anomaly
-1
E
0 c
-3
-5-
-6-
-7-
-1 -
-2-
-3-
-4-
-8
-
0 5
'
I
I
10 15
Area (m 3)
20
500 ohm-m Anomaly
25 30 35
0-6-
Q-7
-8
0 5
L~ I
10 15 20
Area (m 3
)
25 30 35
Figure 3.4(d). Integrated area ofanomaly. Pseudosection data. Margin-located anomalies.
10,000 ohm-m Anomaly
E
0-
S-2
-3 o-5
-6 o -7
-8
-1
-
E
0-
-3
-4 r 6-
C.
o -7
-8 -
5
10 15 20
Area (m3)
500 ohm-m Anomaly
25
10 15
Area (m3)
20 25
Figure 3.4(e). Integrated area of anomaly. Left-right sweep data. Margin-located anomalies.
10,000 ohm-m Anomaly
-1
-@ -2
E
0-
-3
-4
U-
0-5
0
-6
8 7
-8
E
-1
LL
0-5 -
5
10 15 20
Area (m3)
500 ohm-m Anomaly
25
10 15
Area (m 3
)
20 25
Figure 3.4(). Integrated area of anomaly. Left-right-pseudo sweep data. Margin-located anomalies.
3.5 Smoothness as a function of depth
Recall from equation (2.10), the functional f to be minimized. The second term of the equation represents the roughness of the model and is given by s2 = (m -m O)T LTL(m - mo) (3.6)
If we take the inverse of the roughness, then we can arrive at the smoothness of the model at the final iteration such that
Smoothness=
S2
(3.7)
Plotting final iteration smoothness as a function of depth reveals how the smoothness increases as the inversion algorithm attempts to impose minimal structure while solving an increasingly underdetermined problem. Figure 3.5(a) is an example of this type of graph for
10,000 92-m and 500 -m anomalies that were used to produce forward model data analogous to a dipole-dipole pseudosection array geometry. Both the smoothness graph and the integrated area graph tend to exhibit proportional behavior, such that they both appear to increase with depth.
This illustrates evidence of the smearing that the inversion algorithm imposes on anomalies.
Figure 3.5(b) and 3.5(c) are plots of inversion behavior in response to left-right sweep and leftright-pseudo sweep data. Figures 3.5(d)-(f) repeat the tests in response to the geometries, but for margin-located anomalies.
10,000 Ohm-m anomaly
-6
-8
-10
-12
0
-
4
Smoothness
500 Ohm-m anomaly
|| II I
0 20 40 60 80 100
Smoothness
120 140 160 180 200
Figure 3.5(a). Final iteration smoothness as a function of depth. Pseudosection data. Centrally located anomalies. Notice that the trend is for the smoothness to increase with depth.
10,000 Ohm-m anomaly
-12 0
0 1 2 3 4
Smoothness
500 Ohm-m anomaly
5 6 7 8
-2
-6
.1
-10-
-
-12'
0 5 10
Smoothness
15 20 25
Figure 3.5(b). Final iteration smoothness as a function of depth. Left-right sweep data. Centrally located anomalies. Notice that the trend is for the smoothness to increase with depth.
10,000 Ohm-m anomaly
-2
E
E -4 -
-6-
-8 -
0
-1
-
-2-
-3
-4-
-5
-
0.5 1
Smoothness
1.5
500 Ohm-m anomaly
2
0.1 0.2 0.3
Smoothness
0.4 0.5 0.6
2.5
Figure 3.5(c). Final iteration smoothness as a function of depth. Left-right-pseudo sweep data.
Centrally located anomalies. Notice that the trend is for the smoothness to increase with depth.
0
-2
-~-4
-N
10,000 Ohm-rn anomaly
I II I I-
0
-2
E
E -4
-6
0 0.5
I
1
I
1.5 2 2.5
Smoothness
I
500 Ohm-m anomaly
I I
3 3.5
I
5
I
10
I
15
I
20
Smoothness
I
25 30 35
4 4.
Figure 3.5(d). Final iteration smoothness as a function of depth. Pseudosection data. Marginlocated anomalies.
10,000 Ohm-m anomaly
Smoothness
500 Ohm-rn anomaly
0-
-2-
E
5 -4 -
0.
-6-
-8 -
0 0.5 1 1.5
Smoothness
2 2.5 3
Figure 3.5(e). Final iteration smoothness as a function of depth. Left-right sweep data. Marginlocated anomalies.
10,000 Ohm-rn anomaly
-2
E
E -4
0.
-6
-8
0
-1-
-2-
E
_-3-
0.
S-4-
-5-
-6
-7-
0
0.5 1
I I
1.5
I
2
Smoothness
500 Ohm-m anomaly
I
2.5
0.2 0.4 0.6 0.8
Smoothness
1
I
3 3.5
1.2 1.4 1.6 1.8
Figure 3.5(f). Final iteration smoothness as a function of depth. Left-right-pseudo sweep data.
Margin-located anomalies. Notice that the trend is for the smoothness to increase with depth, but that the smoothness is erratic.
60
3.6 The product of per and the integrated area
A closer inspection of the graphs of per as a function of depth and the integrated area as a function of depth reveals that the two descriptors tend to exhibit inversely proportional behavior.
While the critical resistivity of the subsurface decreases for deeper targets, the integrated area increases. However, we know that for the forward model, the critical resistivity and the integrated area remain constant for all depths. It would seem plausible that, perhaps, it is possible to capture a quality within the inversion imagery that reflects both the critical resistivity value and the integrated area when taken as a product. In its simplest form, the product would be:
P(z) = per (z) x area(z)
(3.7) where P(z) is the product at a given depth. In this sense, it is a calculation of bulk resistivity, because we are defining our target as an anomaly that possesses resistivity and area. This is analogous to the approach adopted by Madden (1971), who resolved subsurface resistivity in the
ID case as a product of resistivity and thickness. The inversion algorithm may only be capable of resolving the product as opposed to resolving the resistivity alone. Figure 3.6(a) illustrates this product for the 10,000 Q-m and 500 Q m centrally located anomalies that have been imaged with the left-right-pseudosection array. In its purest form, the product of the inversion-derived Per (z) and the area diverges from the constant forward product. For the 10,000 Q-m case, this is caused
by the significant decay in the critical resistivity value for depths from 1 to 4 meters. The critical resistivity value, determined from the contrast between the anomaly and the background, decays so quickly as a function of depth that the increase in area is unable to compensate. Once the target has reached a greater depth, the continued increase in anomaly area begins to compensate for the low resistivity values. In the case of the 500 Q-m anomaly, the opposite behavior occurs:
the expansion of the integrated area of the anomaly outpaces the decrease in value of the critical resistivity, causing the product to increase as a function of depth.
It is possible to apply a consistent correction to the product that takes into account the behavior of the product with increasing depth. For example, the 10,000 9-m case requires a corrective increase in value for shallow depths in order to overcome the significant decrease in critical resistivity; this allows the corrected product of the inversion solution to approach the actual product of the forward model. This correction must be decreased as the depth increases since the inversion returns an increasingly larger area for the anomaly. One possible correction may be:
P(z)'cwor ,,, = [Pcr(Z) x area(z)]x
I+
-
Z
(3.8)
The results of this correction are also shown in Figure 3.6(a).
The 500 Q-m case requires a different depth correction, since the expansion of the area as a function of depth must be weighed less in order to reduce the overall product and thus approximate the forward model product; but, this correction need only be applied for target depths greater than 4 meters. In this case the product becomes
Ifz > 4 meters,
(3.9) P(z)o',= Pr (z) x area(z)]x 1
These corrected results are also shown in Figure 3.6(a). Figure 3.6(b) shows the ratio between the inversion product and the forward product for both the uncorrected and corrected cases.
Unfortunately, this correction only appears to correct and better approximate the product for centrally located anomalies. Figures 3.6(c) and 3.6(d) illustrate this product between critical resistivity and area for an anomaly located on the left flank. The correction applied for the
centrally located anomaly, when applied to anomalies on the flanks, does not capture a product appropriate to the forward model.
In this short test, it has been shown that it may be possible to capture the bulk resistivity of a target in a 2D case. Because of the smearing introduced to the imagery and the decrease in current density at depth, the product that describes this bulk resistivity must be corrected in order to lend greater weight to the resistivity as a function of depth, or less weight to the area as a function of depth. Determining the appropriate correction can be performed by identifying three key variables: the critical resistivity, p,, (z), which seems to be unique to the depth and magnitude of the actual anomaly; the depth of the anomaly, z; and the horizontal location of the anomaly, x. Using these three variables it may be possible to prescribe a consistent methodology to correct a critical resistivity integrated area product and quite possibly capture resistive anomalies at depths that otherwise would not be resolvable.
10,000 ohm-m Anomaly
0
E -2
4
0
L.
* -6
O -8
0.5 1 1.5
Product = Rhocr * Integrated Area
2
500 ohm-m Anomaly
2.5
x 104
3
E
0
-2 I-
-
Inversion Product
-
Depth-Corrected
Inversion Product
-..... Forward Product u.
0
I-
U-8
0
I i
1000 2000 3000 4000 5000 6000
Product = Rhocr * Integrated Area t I
7000 8000 9000 10000
Figure 3.6(a). The product between the critical resistivity value and the integrated area of anomaly, taken as a
function
of depth for centrally located 10,000 9-m and 500 Q-m anomalies.
Synthetic data was created based on a left-right-pseudosection array geometry. The graphs show solution, and the product for the forward model.
10,000 ohm-m Anomaly
0
0
-2-I
-o
-
LL
0 -8
0
0
0.2 0.4 0.6 0.8 1 1.2 1.4
Ratio of Inverse Product to Forward Product
500 ohm-m Anomaly
1.6 1.8
-- Inv/Fwd
-
Corrected Inv/Fwd
2
0
E -4-
-
0.
0-6
0
I
0.5
I
1
I I I
1.5 2 2.5
Ratio of Inverse Product to Forward Product
I
3 3.5 4
Figure 3.6(b). Ratio between the products for the inversion solution and the forward model, taken as a function of depth for centrally located 10,000 Q-m and 500 Q-m anomalies. Synthetic data was created based on a left-right-pseudosection array geometry. The graphs show the ratio between the uncorrected product for the inversion solution and the forward model, and between the corrected product for the inversion solution and the forward model.
10,000 ohm-m Anomaly
0
0
c -2 --
CL
0-
0
0
-8-
-2
S-4-
0.5
/
CU
II
-
I
1
500oh-m noal
1.5 2
Product = Rhoor * Integrated Area
500 ohm-n Anomaly
I
2.5
-
-e-Inversion
L
Product
-Depth-Corrected
Inversion Product
Forward Product
-
4
3
LS~ -8
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Product =
Rhoc
*
Integrated Area
Figure 3.6(c). The product between the critical resistivity value and the integrated area of anomaly, taken as a function of depth for left-flank located 10, 000 Q -m and 500 Q£?m anomalies.
Synthetic data was created based on a left -right-pseudosection array geometry. The graphs show the uncorrected product for the inversion solution, the corrected product for the inversion solution, and the product for the forward model.
10,000 ohm-rm Anomaly
E-2
0
~ 4
0 0.2 0.4 0.6 0.8 1 1.2 1.4
Ratio of Inverse Product to Forward Product
500 ohm-m Anomaly
1.6 1.8 2
0-
0 0.5 1 1.5 2 2.5
Ratio of Inverse Product to Forward Product
3 3.5
Figure 3.6(d). Ratio between the products for the inversion solution and the forward model, taken as afunction of depth for left-flank located 10,000 Q-m and 500 Q -m anomalies. Synthetic data was created based on a left-right-pseudosection array geometry. The graphs show the ratio between the uncorrected product for the inversion solution and the forward model, and between
Chapter 4
Summary and Conclusions
4.1 Summary of Testing Results
Prior to testing the resistivity inversion algorithm developed by (Shi 1998), we developed the forward problem and the inverse problem in an attempt to bring forth some of the challenges that arise when we attempt to infer 2-D subsurface structure from surface potential measurements. We investigated the possibility of improving the result of the inverse problem by utilizing different array geometries. The pseudosection array produced data with an inversion capture zone for centrally located anomalies, whereas the left-right sweep enabled the capture zone to the flanks. The hybrid of these two array geometries seemed to outperform the other four array types.
It would appear that utilizing the left-right-pseudo sweep as a first-choice application to collect surface measurements over a field of unknown structure is an appropriate strategy. Its ability to capture resistive and conductive targets throughout the subsurface with higher accuracy than the other array geometries makes it a strong first choice.
An alternative approach may be to utilize a left-right sweep alone to determine the presence of any resistive anomalies. Once the relative locations of targets in the subsurface can be determined, secondary and tertiary surveys with the pseudosection array can be performed by centering the array geometry over specific targets. This way, they may be more accurately resolved by the inversion.
The insensitivity that surface measurements experience in response to deeper targets makes it difficult to achieve accurate sampling of the deep subsurface. By testing the algorithm in response to synthetic data generated from a forward model, we illustrated how the insensitivity related to decreasing current density with depth manifests itself in the critical
resistivity values used to create binary plots from the inversion output. The current density distribution and the critical resistivity values appear to exhibit similar asymptotic decay profiles as a function of depth. The decrease of resistivity values could also be witnessed in the imagery produced by the inversion. The utility of the critical resistivity value in the development of 2D binary plots from inversion imagery proved to be valuable as an interpretive tool for identifying the accurate depth and general shape of the targets. However, the binary plots also captured the
"smearing" and expansion of the anomaly for deeper targets.
The regularization used to overcome the numerical ill-posedness and instability of the inverse problem also presents a mechanism for loss of accuracy and resolution. The regularization approach used in the algorithm tested here applies a constraint of minimum roughness in the model. This constraint, coupled with the insensitivity of the surface measurements to deeper targets, causes a smearing in the imagery and a homogenization of resistivity values that increases with depth. The testing performed in this investigation illustrated how the area of the anomaly increased with depth. This behavior could also be compared with the trend in the final smoothness condition of each inverse problem solution, and the results yielded a generally proportional correlation between the area of the anomaly and the level of smoothness with increasing depth.
Finally, we investigated the possibility of calculating a product between the critical resistivity and the integrated area of an anomaly produced by the inversion, in order to capture a bulk resistivity that is comparable to that of the forward model target. It appears possible to calculate an appropriate product by applying corrections that are unique to the critical resistivity and depth, but there is also be a requirement for a correction based on horizontal location.
4.2 Future Work
Most of the work conducted in this study was based on identifying resistive targets against relatively conductive backgrounds. Though some testing was performed on conductive anomalies, it would be appropriate to further investigate the behavior of the inversion in response to conductive targets. In particular, a similar approach that incorporates the use of critical resistivity values to determine resistivity contrast, binary plots, and integrated areas of anomaly would yield significant insight into the performance of the inversion and the survey method for locating conductive anomalies. It would also be interesting to pursue such a study from the perspective of conductivity as opposed to resistivity, to see if the testing methodology improves the utility and interpretation of inversion imagery.
The penetration of current density makes it difficult to collect data that illuminates deep targets. When data is introduced into the algorithm, the inversion algorithm iterates to produce a minimum error solution; unfortunately, the solution reflects lower than appropriate resistivities for deep targets. One approach to overcoming this discrepancy is to "weigh" data samples for deeper locations so that the algorithm may place greater importance on data that otherwise would have left the problem underdetermined.
Another approach would be to conduct an a posteriori correction to the inversion results, based on the critical resistivity value. The testing conducted in Chapter 3 alluded to the possibility that there is a unique correlation between the actual resistivity of the target, the actual depth of the target, and the critical resistivity in the associated model produced by the inversion.
Where weighting of data for deeper sampling blocks may be considered as a conditioning of data, there may be a way to exploit this functional relationship in order to condition the model
parameters produced by the inversion.
The smoothness operator employed in the inversion algorithm must be utilized in order to arrive at an acceptable low-error solution. Unfortunately the smoothing condition and the insensitivity of the data measurements tends to result in excessive smearing of deeper targets.
Like the correlation between critical resistivity values and current density, there also appears to be a correlation between the integrated area of the anomaly (as calculated with the critical resistivity value) and the final smoothness of the model produced by the inversion. Again, an a
posteriori correction to "shrink" anomalies in model space may be possible based on the potentially unique functional relationship between area, smoothness, depth, and critical resistivity. Further investigation into this unique function may yield a methodology for filtering imagery produced by the inversion.
The potential for capturing the bulk resistivity of resistive targets set against relatively conductive backgrounds should be further explored. Though it may not be possible to identify the true shape and absolute resistivity of a deep resistive target, it may be possible to identify the target as a resistive body that is comprised of both material resistivity and size. The ability to estimate the product of these two values (resistivity and area) by using appropriate and consistent corrections for depth may be a significant development towards improving the applicability and accuracy of the resistivity method.
Bibliography
[1] Beard, L. P., and Morgan, F. D., 1991, Assessment of 2-D resistivity structures using 1-D
inversion, Geophysics, 56, 874-883.
[2] Constable, S. C., Parker, R. L., Constable, C. G., 1987, Occam's Inversion: A practical algorithm for generating smooth models from electromagnetic sounding data,
Geophysics, 52, 289-298.
[3] LaBrecque, D. J., Miletto, M., Daily, W., Ramirez, A., and Owen, E., 1996, The affects of noise on Occam's inversion of resistivity tomography data, Geophysics, 61, 538-548.
[4] Madden, T.R., 1971, The resolving power of geoelectrical measurements for delineating resistive zones within the earth's crust: The structure and physical properties of the earth's crust, Heacock, J.G., Ed., American Geophysical Union Monographs, 14, 95-105.
[5] Madden, T. R., 1972, Transmission system and network analogies to geophysical forward and inverse problems, Office ofNaval Research Technical Report, 72-73.
[6] Mufti, I. R., 1976, Finite-difference resistivity modeling for arbitrarily shaped twodimensional structures, Geophysics, 41, 62-78.
[7] Pelton, W. H., Rijo, L., Swift, C. M., 1978, Inversion of two dimensional resistivity and induced polarization data, Geophysics, 43, 788-803.
[8] Sasaki, Y., 1992, Resolution of resistivity tomography inferred from numerical simulation, Geophysical Prospecting, 40, 453-463.
[9] Shi, Weiqun, and Morgan, F. D., 1997, Application of electrical resistivity tomography to image Harrison Caves in Barbados, West Indies, Society ofExploration Geophysics
6 7th
Annual Meeting: Expanded Abstracts, 1, 350-353.
[10] Shi, Weiqun, 1998, PhD Dissertation: Advanced Modeling and Inversion Techniques for
Three-dimensional Geoelectrical Surveys, Massachusetts Institute of Technology.
[11] Telford, W. M., Geldart, L. P., Sherriff, R. E., 1990, Applied Geophysics,
2
"d Edition,
Cambridge University Press.
[12] Tripp, A. C., Hohmann, G. W., Swift, C. M., 1984, Two-dimensional resistivity inversion, Geophysics, 49, 1708-1717.
[13] Zhang, J., Mackie, R. L., Madden, T. R., 1995, 3-D Resistivity forward modeling and inversion using conjugate gradients, Geophysics, 60, 1313-1325.
Appendix 1: Imaging of a 10,000 fl-m anomaly. Central location.
Al-
Forward: Resistivity (Ohm-m)
0
10
E5
0.
10
0
0
0
0
.0.5
0
0 10
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
10 15
Distance (m)
20 25
20 25
1
0.5
6000
4000
2000
0
10000
8000
6000
4000
2000
Figure A]-1. Pseudosection imagery. Anomaly depth = 1 m below surface.
A1-2
0
010
0
0
E,5
10
0
0
010
0
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20
5
5
10 15
Inversion (Binary Image)
10
Distance (m)
15
20
20
25
25
25
6000
M 4000
2000
1
0.5
005
0
10000
8000
6000
4000
2000
Figure A1-2. Left-right sweep imagery. Anomaly depth = 1 m below surface.
A1-3
Forward: Resistivity (Ohm-m)
0 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
160
140
120
100
1
10000
8000
6000
4000
2000
0 5 10 15
Distance (m)
20 25
Figure Al-3. Middle-sweep imagery. Anomaly depth = 1 m below surface.
A1-4
a.
10
0
10
0
0
0
-
010
5
0
0
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20
5 10 15
Inversion (Binary Image)
20
5 10
Distance (m)
15 20
25
25
25
-
1
05
0.5
0
8000
6000
4000
2000
10000
8000
6000
4000
2000
Figure A]-4. Left-right-pseudo sweep imagery. Anomaly depth 1 m below surface.
A1-5
Forward: Resistivity (Ohm-m)
E5 a.
O10
10
0
0
0
0
5
1.0
0
0 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
10
Distance (m)
15
20
20
25
25
1
0.5
0
8000
6000
4000
2000
10000
8000
6000
4000
2000
Figure A1-5. Left-right-middle sweep imagery. Anomaly depth 1 m below surface.
A1-6
Forward: Resistivity (Ohm-m)
0
E5
0
0
O 10
0
5
10
E5
0.
S10
0
0 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
10
Distance (m)
15
20
20
25
25
0.5
0
500
400
300
200
100
1
10000
8000
6000
4000
2000
Figure A1-6. Pseudosection imagery. Anomaly depth = 3 m below surface.
A1-7
0
O 0 i5
0
0
0 10
0
0
5
0 10
0
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20
5 10 15
Inversion (Binary Image)
20
5
00
10
Distance (m)
15
25
25
20
-
25
-
0.5
0
400
300
200
100
1
10000
8000
6000
4000
2000
Figure A 1-7. Left-right sweep imagery. Anomaly depth = 3 m below surface.
A1-8
Forward: Resistivity (Ohm-m)
0
CL
0) o10
E5
010
0
0
E 5
0
010
0
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
1
0.5
110
105
100
10000
8000
6000
4000
2000
Figure A ]-8. Middle-sweep imagery. Anomaly depth = 3 m below surface.
A1-9
0
E 5 o10
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
500
400
300
200
100
1
10000
8000
6000
4000
2000
5 10 15
Distance (m)
20 25
Figure A 1-9. Left-right-pseudo sweep imagery. Anomaly depth
= 3 m below surface.
Al-10
,5
0.
0 10
0
0
0
0
E 5
0.0
010
0
5 10 15
Inversion: Resistivity (Ohm-m)
20
5 10 15
Inversion (Binary Image)
20
5
Forward: Resistivity (Ohm-m)
10 15
Distance (m)
20
25
25
I I
1
250
200
150
100
10000
8000
6000
4000
2000
25
Figure A.l-10. Left-right-middle sweep imagery. Anomaly depth
= 3 m below surface.
A l-I
Appendix 2: Imaging of a 500 fl-m anomaly. Central location.
A2-1
Forward: Resistivity (Ohm-m)
0
CL
10
5
'S.
10
0
0
0
0 a)
0 10
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
1
05
0.5
500
400
300
200
100
500
400
300
200
100
0
Figure A2-1. Pseudosection imagery. Anomaly depth = 1 m below surface.
A2-2
Forward: Resistivity (Ohm-m)
5
5 10 15
Inversion (Binary Image)
20 25
5
10 15
Inversion: Resistivity (Ohm-m)
20 25
10
Distance (m)
15 20 25
.1
500
400
300
200
100
500
400
300
200
100
0.5
0
Figure A2-2. Left-right sweep imagery. Anomaly depth = m below surface.
A2-3
Forward: Resistivity (Ohm-m)
0 a.
0
010
0
'S.
0
010
010
E5
0
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10 15
Distance (m)
20 25
140
120
100
1
500
400
300
200
100
0.5
0
Figure A2-3. Middle-sweep imagery. Anomaly depth = 1 m below surface.
A2-4
Forward: Resistivity (Ohm-m)
5
C.
10
0
0
0
5
10
E5
C.
O 10
0
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
0.5
0
500
400
300
200
200
100
500
400
300
200
100
1
Figure A2-4. Left-right-pseudo sweep imagery. Anomaly depth 1 m below surface.
A2-5
Forward: Resistivity (Ohm-m)
0
E5
0
0
0010
0
10
5
010
0
0-
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
500
400
300
200
100
1
500
400
300
200
100
0.5
Figure A2-5. Left-right-middle sweep imagery. Anomaly depth =1 m below surface.
A2-6
Forward: Resistivity (Ohm-m)
010
E5
0.
010
0
0
0
0
5
010
0
0 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10 15
Distance (m)
20 25
200
150
100
1
0.5
500
400
300
200
100
Figure A2-6. Pseudosection imagery. Anomaly depth = 3 m below surface.
A2-7
Forward: Resistivity (Ohm-m)
E5
0
010
0
0
E5
.
0
010
0
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
20
10
Distance (m)
15 20
25
25
200
150
100
500
400
300
200
100
Figure A2-7. Left-right sweep imagery. Anomaly depth = 3 m below surface.
A2-8
0
E.5
0.
010
0
E,5
0.
o
0
E.5
0.
o10
Forward: Resistivity (Ohm-m)
5
5
10 15
Inversion: Resistivity (Ohm-m)
20
10 15
Inversion (Binary Image)
20
25
25
5 10 15
Distance (m)
20 25
0.5
0
108
106
104
102
100
98
1
500
400
300
200
100
Figure A2-8. Middle-sweep imagery. Anomaly depth = 3 m below surface.
A2-9
Forward: Resistivity (Ohm-m)
0
E 5
010
0
E5
.1
010
E5
.
0 10
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
10 15
Distance (m)
20 25
20 25
200
150
100
500
400
300
200
100
Figure A2-9. Left-right-pseudo sweep imagery. Anomaly depth = 3 m below surface.
A2-10
Forward: Resistivity (Ohm-m)
0
10
0
0
5
0.
010
0
0
50.5
10
0
5 10 15
Inversion: Resistivity (Ohm-m)
20
5 10 15
Inversion (Binary Image)
20
5
00.
10
Distance (m)
15 20
-500
25
25
25
400
300
200
100
180
160
140
120
100
1
0
Figure A2-10. Left-right-middle sweep imagery. Anomaly depth 3 m below surface.
A2-1 1
Appendix 3: Imaging of a 10,000 fQ-m anomaly. Left flank location.
A3-1
Forward: Resistivity (Ohm-m)
0
0
E 5
010
0
0
.
E5
10
E5
.
010
0
C 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
10 15
Distance (m)
20
20
25
25
10000
8000
6000
4000
2000
0
180
160
140
120
100 i1
0.5
Figure A3-1. Pseudosection imagery. Anomaly Depth = 2 m below surface.
A3-2
Forward: Resistivity (Ohm-m)
5
0.
10
0
0
E5
0
0
0 10
0
0
5
10
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
500
400
300
200
100
1
0.5
0
10000
8000
6000
4000
2000
Figure A3-2. Left-right sweep imagery. Anomaly Depth = 2 m below surface.
A3-3
E, 5
.1
0 10
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
140
120
100
10000
8000
6000
4000
2000
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
Figure A3-3. Middle-sweep imagery. Anomaly Depth = 2 m below surface.
A3-4
Forward: Resistivity (Ohm-m)
0
5
%E, 5
10
0
0
E5
M
0.
S10
0
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
10
Distance (m)
15
20
20
25
25
0.5
0
1000
800
600
400
200
1
10000
8000
6000
4000
2000
Figure A3-4. Left-right-pseudo sweep imagery. Anomaly Depth 2 m below surface.
A3-5
Forward: Resistivity (Ohm-m)
0
E 5
10
0
0 a.
010
E5 a.
O 10
0
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
00
10 15
Inversion (Binary Image)
10 15
Distance (m)
20
20
25
25
500
400
300
200
100
1
0.5
10000
8000
6000
4000
2000
Figure A3-5. Left-right-middle sweep imagery. Anomaly Depth 2 m below surface.
A3-6
E5
C.
010
0
0
0
0
0
5
10
010
0
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20
5 10 15
Inversion (Binary Image)
20
5 10 15
Distance (m)
20
25
25
I I
1
250
200
150
100
10000
8000
6000
4000
2000
25
Figure A3-6. Pseudosection imagery. Anomaly depth = 3 m below surface.
A3-7
Forward: Resistivity (Ohm-m)
0
010
0
0
C.
10
C1
5
0
0
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
10 15
Inversion (Binary Image)
20
10
Distance (m)
15 20
25
25
0.5
0
300
200
100
1
10000
8000
6000
4000
2000
Figure A3-7. Left-right sweep imagery. Anomaly depth = 3 m below surface.
A3-8
Forward: Resistivity (Ohm-m)
0
E 5
10
0
0 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
0
0
0
010
0
5 10 15
Inversion (Binary Image)
20 25
5 10 15
Distance (m)
20 25
1
0.5
0
110
100
10000
8000
6000
4000
2000
Figure A3-8. Middle-sweep imagery. Anomaly depth
= 3 m below surface.
A3-9
Forward: Resistivity (Ohm-m)
0
5
010
0
0
5
10
0
0 a.
Q 10
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5
5
00
10 15
Inversion (Binary Image)
10
Distance (m)
15
20
20
-
25
25
1
05
0.5
400
300
200
100
0
10000
8000
6000
4000
2000
Figure A3-9. Left-right-pseudo sweep imagery. Anomaly depth
= 3 m below surface.
A3-10
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
0
E 5 a.
0 10
E5 a.
0 10
0
0 5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
0.5
0
300
250
200
150
100
1
10000
8000
6000
4000
2000
Figure A3-10. Left-right-middle sweep imagery. Anomaly depth = 3 m below surface.
A3-11
Appendix 4: Imaging of a 500 12-m anomaly. Left flank location.
A4-1
0
C1
010
0
0
10
0
0
010
0
Forward: Resistivity (Ohm-m)
5
E 5
10 15
Inversion: Resistivity (Ohm-m)
20
5 10 15
Inversion (Binary Image)
20
25
25
500
400
300
200
100
140
130
120
110
100
1
05
0.5
5 10 15
Distance (m)
20 25
Figure A4-1. Pseudosection imagery. Anomaly Depth = 2 m below surface.
A4-2
0
0.
0
0
0.
10
0
0
0
010
0
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
100
300
250
0.5
200
150
100
500
400
300
200
1
0.5
5 10 15
Distance (m)
20 25
Figure A4-2. Left-right sweep imagery. Anomaly Depth = 2 m below surface.
A4-3
Forward: Resistivity (Ohm-m)
0
%-5
.
0 10
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
%O5 a.
010
015
0
0 10
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
1
0.5
0
120
110
100
500
400
300
200
100
Figure A4-3. Middle-sweep imagery. Anomaly Depth = 2 m below surface.
A4-4
Forward: Resistivity (Ohm-m)
0
05
10
0
%O5
0.
010
0
015
S10
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10 15
Distance (m)
20 25
300
200
100
1
0.5
0
500
400
300
200
100
Figure A4-4. Left-right-pseudo sweep imagery. Anomaly Depth = 2 m below surface.
A4-5
0
010
5
0.
)0
010
0
0
0
0 a)
O 10
0
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
1
05
0.5
500
400
300
200
100
250
200
150
100
5
00
10 15
Distance (m)
20 25
Figure A4-5. Left-right-middle sweep imagery. Anomaly Depth
= 2 m below surface.
A4-6
Forward: Resistivity (Ohm-m)
E5
0.
010
0
E5
010
0
0
*O5
0
010
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
120
110
100
500
400
300
200
100
1
0.5
0
Figure A4-6. Pseudosection imagery. Anomaly depth = 3 m below surface.
A4-7
.
10
C
0 5
Forward: Resistivity (Ohm-m)
10 15
Inversion: Resistivity (Ohm-m)
20 25
10
CL
0 5 10 15
Inversion (Binary Image)
20 25
0 5 10 15
Distance (m)
20 25
0.5
0
200
150
100
500
400
300
200
100
Figure A 4-7. Left-right sweep imagery. Anomaly depth = 3 m below surface.
A4-8
Forward: Resistivity (Ohm-m)
-%
0
10
0
0 5 10 15
Inversion: Resistivity (Ohm-m)
20
10
E5 a.
010
0
0
0 m-
5
5
10 15
Inversion (Binary Image)
20
10 15
Distance (m)
20
25
25
25
1
0.5
0
500
400
300
200
100
115
110
105
100
Figure A4-8. Middle-sweep imagery. Anomaly depth = 3 m below surface.
A4-9
Forward: Resistivity (Ohm-m)
0
E15
010
0
0
E5
010
0
0 a.
G)1
5
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
200
150
100
500
400
300
200
100
1
0.5
0
Figure A4-9. Left-right-pseudo sweep imagery. Anomaly depth = 3 m below surface.
A4-10
0
E5
0
010
E5
0
10
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
500
400
300
200
100
180
160
140
120
100
1
5 10 15
Distance (m)
20 25
Figure A4-10. Left-right-middle sweep imagery. Anomaly depth
= 3 m below surface.
A4- 11
Appendix
5:
Imaging of a 1 fl-m anomaly. Central location.
A5-1
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
150
100
50
100
80
60
40
20
10
0
0
5
0
5 10 15
Inversion (Binary Image)
5 10
Distance (m)
15 20 25
Figure A5-1. Pseudosection imagery. Anomaly Depth =1 m below surface.
A5-2
Forward: Resistivity (Ohm-m)
0
E5
0.
010
0
0
CL
0
010
E5
0
0
0.
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
5 10 15
Distance (in)
20 25
0.5
0
120
100
80
60
40
20
1
100
80
60
40
20
Figure A 5-2. Left-right sweep imagery. Anomaly Depth 1 m below surface.
A5-3
0
E 5
.
0
010
E5
10
0
0
E 5
0
0 10
0
0
0
5
5 10 15
Inversion (Binary Image)
20 25
5
Forward: Resistivity (Ohm-m)
10 15 inversion: Resistivity (Ohm-m)
10
Distance (m)
15
20
20
-100
25
25
1
0.5
0
150
100
50
80
60
40
20
Figure A5-3. Middle-sweep imagery. Anomaly Depth = 1 m below surface.
A5-4
Forward: Resistivity (Ohm-m)
0
E5
4)
010
0 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
150
100
50
100
80
60
40
20
10 15
Inversion (Binary Image)
0 5 10 15
Distance (m)
20 25
Figure A5-4. Left-right-pseudo sweep imagery. Anomaly Depth = 1 m below surface.
A5-5
0
E5
10
0
0
E5
0 10
0
0 5
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20
10 15
Inversion (Binary Image)
20
25
25
5 10
Distance (m)
15 20 25
1
0.5
0
200
150
100
50
100
80
60
40
20
Figure A5-5. Left-right-middle sweep imagery. Anomaly Depth = 1 m below surface.
A5-6
0
E, 5
0
010
0
E5
10
0
0
5
10
Forward: Resistivity (Ohm-m)
5
10
10
15
Inversion: Resistivity (Ohm-m)
15
Inversion (Binary Image)
20 25
5 10
Distance (m)
15 20 25
150
100
50
100
80
60
40
20
1
0.5
0
Figure A5-6. Pseudosection imagery. Anomaly depth = 3 m below surface.
A5-7
Forward: Resistivity (Ohm-m)
0 5 10 15
Inversion: Resistivity (Ohm-m)
20 25
E. 5
.
O 10
0
0 5 10 15
Inversion (Binary Image)
20 25
5 10 15
Distance (m)
20 25
0.5
0
120
100
80
60
40
1
100
80
60
40
20
Figure A5-7. Left-right sweep imagery. Anomaly depth = 3 m below surface.
A5-8
Forward: Resistivity (Ohm-m)
0
E5
010
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
C1
0
5
0 5 10 15
Inversion (Binary Image)
0 5 10 15
Distance (m)
20 25
0.5
0
110
100
90
80
100
80
60
40
20
Figure A5-8. Middle-sweep imagery. Anomaly depth = 3 m below surface.
A5-9
Forward: Resistivity (Ohm-m)
0
E 5
010
0
5
0
0
0
0 a.
010
0
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
10 15
Distance (m)
20 25
200
150
100
50
1
0.5
100
80
60
40
20
Figure A5-9. Left-right-pseudo sweep imagery. Anomaly depth 3 m below surface.
A5-10
0
E5
0
010
0
E 5
10
Forward: Resistivity (Ohm-m)
5 10 15
Inversion: Resistivity (Ohm-m)
20 25
5 10 15
Inversion (Binary Image)
20 25
1
0.5
0
250
200
150
100
50
100
80
60
40
20
5 10
Distance (m)
15 20 25
Figure A5-10. Left-right-middle sweep imagery. Anomaly depth = 3 m below surface.
A5-11