Faster Fully Polynomial Approximation Schemes for
Knapsack Problems
by
Donguk Rhee
B.Math, University of Waterloo, 2010
M.Math, University of Waterloo, 2012
SUBMITTED TO THE SLOAN SCHOOL OF MANAGEMENT
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE IN OPERATIONS RESEARCH
AT THE
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2015
c 2015 Massachusetts Institute of Technology. All rights reserved.
Signature of Author
Sloan School of Management
May 15, 2015
Certified by
James B. Orlin
E. Pennell Brooks (1917) Professor in Management
Sloan School of Management
Thesis Supervisor
Accepted by
Patrick Jaillet
Dugald C. Jackson Professor
Department of Electrical Engineering and Computer Science
Co-director, Operations Research Center
Faster Fully Polynomial Approximation Schemes for
Knapsack Problems
by
Donguk Rhee
Submitted to the Sloan School of Management on May 15, 2015 in Partial Fulfillment
of the Requirements for the Degree of Master of Science in Operations Research
ABSTRACT
A fully polynomial time approximation scheme (FPTAS) is an algorithm that returns
(1 − )-optimal solution to a maximization problem of size n, which runs in polynomial
time in both n and 1/. We develop faster FPTASs for several classes of knapsack
problems.
In this thesis, we will first survey the relevant literature in FPTASs for knapsack problems. We propose the use of floating point arithmetic rather than the use of geometric
rounding in order to simplify analysis. Given a knapsack problem that yield an (1 − )optimal solution for disjoint subsets S and T of decision variables, we show how to attain
e −2 ). We
(1 − 1.5)-optimal solution for the knapsack problem for the set S ∪ T in O(
use this procedure to speed up the run-time of FPTASs for
1. The Integer Knapsack Problem
2. The Unbounded Integer Knapsack Problem
3. The Multiple-Choice Knapsack Problem, and
4. The Nonlinear Integer Knapsack Problem
Using addition ideas, we develop a fast fully polynomial time randomized approximation scheme (FPRAS) for the 0-1 Knapsack Problem, which has the run-time of
O n min(log n, log 1 ) + −2.5 log3 1 .
Thesis Supervisor: James B. Orlin
Title: E. Pennell Brooks (1917) Professor in Management
ACKNOWLEDGMENT
I would first like to thank James Orlin, my thesis adviser, for all the help he has given.
I would like to thank the Operations Research Center for providing amazing opportunities.
Finally, I would like to thank my parents, who always fully supported my academic
pursuit.
Table of Contents
1 Introduction
1.1 Knapsack Problems . . . . . . . . . . . . . . . .
1.1.1 Definition . . . . . . . . . . . . . . . . .
1.1.2 Variations . . . . . . . . . . . . . . . . .
1.2 Approximation Algorithms . . . . . . . . . . . .
1.2.1 Fully Polynomial Approximation Scheme
1.2.2 Randomized Approximation Scheme . .
1.3 Organization of Thesis . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
11
12
13
13
14
14
2 Survey
2.1 A Simple FPTAS for Knapsack . . . . . . . . . .
2.1.1 Dynamic Programming for Knapsack . . .
2.1.2 Rounding Down the Profits . . . . . . . .
2.1.3 Algorithm . . . . . . . . . . . . . . . . . .
2.2 Ibarra and Kim . . . . . . . . . . . . . . . . . . .
2.2.1 Half Optimum . . . . . . . . . . . . . . . .
2.2.2 Rounding Down the Profits . . . . . . . .
2.2.3 Algorithm . . . . . . . . . . . . . . . . . .
2.3 Lawler . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Modification of the Dynamic Programming
2.3.2 Progressive Rounding . . . . . . . . . . . .
2.3.3 Elimination of Sorting . . . . . . . . . . .
2.4 Kellerer and Pferschy . . . . . . . . . . . . . . . .
2.4.1 Progressive Rounding . . . . . . . . . . . .
2.4.2 Improving the Dynamic Program . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
15
15
15
16
16
17
17
18
18
19
19
20
21
21
22
23
.
.
.
.
.
25
25
26
27
27
29
3 Framework for Knapsack FPTAS
3.1 -Inner Approximations . . . . . .
3.1.1 Upper and Lower Inverse .
3.1.2 -Inner Approximations .
3.2 Floating Point Arithmetic . . . .
3.3 Exact Merging . . . . . . . . . .
.
.
.
.
.
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3.4
3.5
3.3.1 Merging Relation . . . . . . . .
3.3.2 MergeAll Procedure . . . . . . .
Approximate Merging . . . . . . . . .
3.4.1 ApproxMerge Procedure . . . .
3.4.2 ApproxMergeAll Procedure . .
Outline of Knapsack Algorithms . . . .
3.5.1 Outline of an Exact Algorithm .
3.5.2 Outline of a FPTAS . . . . . .
4 Knapsack Approximation Algorithms
4.1 Nonlinear Knapsack Problem . . . .
4.1.1 The Upper Inverse . . . . . .
4.1.2 Profit Threshold . . . . . . .
4.1.3 Algorithm . . . . . . . . . . .
4.1.4 Correctness . . . . . . . . . .
4.1.5 Running Time . . . . . . . . .
4.2 Multiple Choice Knapsack Problem .
4.3 Unbounded Knapsack Problem . . .
4.3.1 The Upper Inverse . . . . . .
4.3.2 Profit Threshold . . . . . . .
4.3.3 Algorithm . . . . . . . . . . .
4.3.4 Correctness . . . . . . . . . .
4.3.5 Running Time . . . . . . . . .
4.4 0-1 Knapsack Problem . . . . . . . .
4.4.1 The Upper Inverse . . . . . .
4.4.2 Profit Threshold . . . . . . .
4.4.3 Algorithm . . . . . . . . . . .
4.4.4 Correctness . . . . . . . . . .
4.4.5 Running Time . . . . . . . . .
4.5 Integer Knapsack Problem . . . . . .
4.5.1 The Upper Inverse . . . . . .
4.5.2 Profit Threshold . . . . . . .
4.5.3 Algorithm . . . . . . . . . . .
4.5.4 Correctness . . . . . . . . . .
4.5.5 Running Time . . . . . . . . .
5 Randomized Algorithm
e −5/2 ) . . . . . .
5.1 Achieving O(
5.2 Small Number of Items . . . .
5.3 Large Number of Items . . . .
5.4 Properties of ψT (p) (b, λ) . . . .
5.4.1 Lagrangian Relaxation
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
30
31
31
33
34
34
35
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
37
37
37
38
38
38
39
39
40
40
41
41
41
43
43
43
44
44
45
45
45
45
46
46
46
47
.
.
.
.
.
49
49
51
52
53
53
5.5
5.4.2 Simple Observations . . . . .
5.4.3 An Example of ψT (p) (b, λ) . .
5.4.4 Evaluation of ψT (p) (b, λ) Using
Randomized Algorithm . . . . . . . .
. . . . . . . .
. . . . . . . .
Median Find
. . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
53
54
55
57
6 Conclusion
59
Bibliography
61
9
Chapter 1
Introduction
1.1
1.1.1
Knapsack Problems
Definition
Knapsack problems are a well-known class of combinatorial optimization problems. We
have n items, each indexed by i ∈ N := {1, 2, · · · , n}. Item i has weight wi and profit
pi . The 0-1 Knapsack Problem is to select a subset of items that maximizes the total
profit under the constraint that the total weight does not exceed a given capacity C:
max z(C) =
X
s.t.
X
p i xi
i∈N
wi xi ≤ C
i∈N
xi ∈ {0, 1} for all i ∈ N.
Knapsack problems are commonly found in practice. Suppose there are n different
investment opportunities. Investment i requires wi dollars and returns profit of pi . Then
the problem of maximizing the profit given a capital of C is a knapsack problem. Besides
capital budgeting, knapsack problem can model other real life problems such as cargo
loading and cutting stock [8]. Its hardness was once proposed to used to secure knapsack
cryptosystems [10]. A study in 1998 ranked knapsack problem as having the 4th largest
need for implementations by industrial users [12].
It is well known that knapsack problems are NP-hard. However, their combinatorial
structure and simplicity attracted many theoreticians and practitioners to research these
problems, dating back to 1897 [9]. This has resulted in many published exact algorithms
and approximation algorithms. In this thesis, we will establish a framework for approximation algorithms for variants of knapsack problems and improve many run-times.
11
1.1.2
Variations
We will consider several extensions and generalizations of the 0-1 Knapsack Problem.
One way to generalize the problem is to allow multiple copies of items to be selected.
Suppose we have li copies of the item i. Then the resulting problem is formulated as
follows:
Integer Knapsack Problem
X
max
p i xi
i∈N
s.t.
X
w i xi ≤ C
i∈N
0 ≤ xi ≤ li , xi ∈ Z for all i ∈ N.
If there is no bound on the number of each item entirely, the resulting generalization
is called the Unbounded Knapsack Problem.
Unbounded Knapsack Problem
X
max
p i xi
i∈N
X
s.t.
w i xi ≤ C
i∈N
xi ∈ N0 for all i ∈ N.
A orthogonal way to modify the problem is to restrict how the items can be selected.
Instead of allowing a choice for each item, we can have sets of items and choose one
from each set. We let S1 , S2 , · · · , Sm be a partition of N .
Multiple Choice Knapsack Problem
X
max
p i xi
i∈S
s.t.
X
w i xi ≤ C
i∈S
X
xi = 1 for all j ∈ [1, m]
i∈Sj
xi ∈ {0, 1} for all i ∈ N
12
Finally, the most general problem we will consider is the Nonlinear Knapsack Problem. Instead of having a fixed profit assigned to each item, we have a curve of profits
for each items. We let pi (xi ) be the profit of selecting a weight of xi of item i.
Nonlinear Knapsack Problem
X
max
pi (xi )
i∈N
s.t.
X
xi ≤ C
i∈N
xi ∈ N0 for all i ∈ N
Note that in the above formulation, the coefficient of xi in the constraint is 1, because
xi is now the weight. The problem in which xi is the number of copies of item i can be
transformed into the non-linear knapsack problem given above. Thus, it is sufficient to
consider this formulation.
We will consider these variations of knapsack problem and provide a fast approximation algorithm for each.
1.2
Approximation Algorithms
Since all these knapsack problems are NP-hard, there is no polynomial time algorithm
assuming N P 6= P . However, it is possible to find a solution in polynomial time that
has small amount of error. This is the idea behind approximation algorithms.
1.2.1
Fully Polynomial Approximation Scheme
Suppose we have a maximization problem maxx z(x). Suppose that the size of the
instance of the problem is n and that x∗ is an optimal solution.
Definition 1.2.1. A polynomial time approximation scheme (PTAS) is an algorithm that takes an instance of the maximization problem and a parameter > 0 with
the following properties:
• It is guaranteed to produce a solution x0 such that z(x0 ) > (1 − )z(x∗ ).
• It runs in polynomial time in n for every fixed value of .
A fully polynomial time approximation scheme (FPTAS) is a PTAS with
polynomial run-time in both n and 1/. Most of the algorithms we present in this thesis
will be FPTASs.
13
1.2.2
Randomized Approximation Scheme
The last chapter of this thesis will consider a randomized approximation algorithm for
e −1/2 ) faster then the best
the 0-1 Knapsack Problem. Our randomized algorithm is O(
deterministic FPTAS.
Definition 1.2.2. A fully polynomial time randomized approximation scheme
(FPRAS) is an algorithm that takes an instance of the maximization problem and a
parameter > 0 with the following properties:
• It has at least 50% chance of producing a solution x0 such that z(x0 ) > (1−)z(x∗ ).
• It runs in polynomial time in n and 1/.
By running a FPRAS k times and taking the maximum, we can obtain an (1 − )optimal solution with probability greater than 1 − 2−k .
1.3
Organization of Thesis
The rest of the thesis is organized as follows: the second chapter will take a brief survey
of approximation algorithms of knapsack problems. We will start from a very simple approximation algorithm and then take a look at the first FPTAS of knapsack problem by
Ibarra and Kim. We will also study the improvement by Lawler and the quickest known
FPTAS by Kellerer and Pferschy. In chapter 3, we will build a framework in which we
develop our faster approximation algorithms. Background on concepts of lower and upper inverses, inner approximations, and floating point arithmetic are presented. Then we
will develop procedures that merge solutions of knapsack problems with disjoint subsets.
These procedures are used in our algorithms for dynamic programming. In chapter 4, we
present FPTAS for various knapsack problems. We approximately solve the Nonlinear
Knapsack Problem in O(n−2 log(n/) + n/ log(n/)) time, Multiple-Choice Knapsack
Problem in O(n log n + nm−2 log(m/)) time, the Unbounded Knapsack Problem in
O n + −2 log4 1 time, the 0-1 Knapsack Problem in O(n log n + −3 log 1 ) time, and
the integer Knapsack Problem in O(n log n+−3 log 1 ) time. Finally, chapter 5 will show
a faster randomized approximation algorithm for 0-1 Knapsack Problem, achieving the
run-time of O(n log n + −5/2 log3 1 ).
14
Chapter 2
Survey
2.1
A Simple FPTAS for Knapsack
We will begin by taking a look at a simple FPTAS for 0-1 Knapsack Problem with a
run-time of O(n3 /). For more details on the FPTAS shown in this section, see [4] [11].
2.1.1
Dynamic Programming for Knapsack
For the rest of the thesis, we will assume that the 0-1 Knapsack Problem does not
contain items with weight greater than C. Such items can be removed in O(n) time, so
it is safe to make this assumption.
Let P be an upper bound on the profits pi in an instance of the 0-1 Knapsack
Problem. Then the possible total profits are in the range of [0, nP ], where the notation
[a, b] refers to the set of integers {a, a + 1, · · · , b}. Suppose that we solve the problem of
achieving minimum weight subject to getting every possible profit. Then we can easily
add one more item to the solution by making the binary decision of whether to choose
the new item for a given profit goal.
To be more precise, let G(j, p) be the minimum total weight under constraints that
only the first j items can be used and that the total profit is at least p. That is,
(
)
X
X
G(j, p) := min
wi xi :
pi xi ≥ p, xi ∈ {0, 1} .
i≤j
i≤j
Then G(j, p) satisfies the following recursion:
(
0 if p = 0
G(0, p) =
∞ otherwise,
G(j, p) = min {G(j − 1, p), G(j − 1, p − pj ) + wj }
where g(j, p) = g(j, 0) for p < 0.
15
Using this recursion, G(j, p) can be computed for all j ∈ N , p ∈ [0, nP ] in O(n2 P )
time. To get the optimal objective to the 0-1 Knapsack Problem, scan the values of
G(n, p) until we find the largest p such that G(n, p) < C.
An optimal solution could be retrieved if we keep track of whether item j + 1 was
used at each recursion step. Then we can backtrack from G(n, p) to figure out which
items were chosen.
2.1.2
Rounding Down the Profits
We now have a polynomial algorithm for 0-1 Knapsack Problem if the profits are polynomially bounded in n. In order to get a FPTAS, consider scaling down the profits like
this: p0i = bpi /δc. We would have a problem that roughly looks like the original problem,
but with smaller range on the profit of items.
Our goal is to have that the total profit incur less than relative error from the floor
operation. Suppose x is a solution with objective value at least P . For one item, we
have pi − δp0i = pi − δbpi /δc < δ. Thus the error is
P
P
0
δn
δxi
xi =1 pi − δpi
P
<P
<
.
P
xi =1 pi
xi =1 pi
We want δn
≤ , so we pick δ = P/n. It is easy to prove that the optimal solution to
P
the rounded down problem is a -approximate solution to the original problem.
The dynamic programming algorithm can be used in the scaled down problem and
run in O(n3 /) time. Note that the run-time is polynomial in both n and 1/. Thus we
now have a FPTAS for 0-1 Knapsack Problem.
2.1.3
Algorithm
0-1 Knapsack Approximation Algorithm (Slow)
Rounding
Let P = maxi∈N pi , δ = P/n.
For i from 1 to n: p0i = bpi /δc.
Let P 0 = bP/δc,
Dynamic programming
Let G(0, 0) = 0.
For p0 from 1 to nP 0 : G(0, p) = ∞.
For i from 1 to n:
For p0 from 0 to nP 0 :
G(i, p0 ) = min {G(i − 1, p0 ), G(i − 1, p0 − bp0i /δc) + wi }
Output
For p0 from 0 to nP 0 :
If G(n, p0 ) > C: Return d(p0 − 1)δe.
16
2.2
Ibarra and Kim
Ibarra and Kim’s result in 1985 is the first non-trivial FPTAS for the 0-1 Knapsack
Problem [2]. Their algorithm has the run-time of O(n log n + −4 log 1 )). All the subsequent effort on FPTAS for knapsack problems are built on their work, so it is important
to examine their work. Our presentation of this algorithm is modified to match the
presentation of our main result and to simplify the presentation by omitting the details
concerning space complexity.
Their algorithm introduces two new ideas on top of the dynamic programming FPTAS. The first is that the items with small profits can be set aside and solved quickly
with small error using greedy algorithm. The second idea is to scale more aggressively
by getting better rough approximation of the optimal objective value. Recall that the
scaling factor δ was constrained by the lower bound on the optimal objective value (P
in the previous algorithm). By getting a better lower bound, we can δ to be larger,
reducing the number of profits to be considered. On the other hand, having a good
upper bound on the optimal objective value will also reduce the number of profits to be
considered (nP in the previous algorithm).
2.2.1
Half Optimum
In the 0-1 Knapsack Problem, 1/2-approximate solution can be found in O(n log n) time.
Such solution can be found by greedily picking items by profit density. We will first note
a simple lemma about greedy algorithm in the 0-1 Knapsack Problem. This lemma will
come in handy in a few other places as well.
Lemma 2.2.1. Consider an instance of a 0-1P
Knapsack Problem
Pk+1with pi /wi ≥ pi+1 /wi+1
k
for all i. Suppose that k was found to satisfy i=1 wi ≤ C ≤ i=1 wi . Then the solution
(
1 i≤k
xi =
0 i>k
is within pk+1 of the optimal. That is: z ∗ ≤ pk+1 +
objective value.
Pk
i=1
pi where z ∗ is the optimal
P
Proof. If the capacity constraint was relaxed by increasing C to k+1
i=1 wi , then x with
∗
xk+1 = 1 is clearly
Pk an optimal solution. Thus, z cannot have an objective value greater
than pk+1 + i=1 pi .
P
If no such k exists, the problem is trivial. Let 2zL := k+1
i=1 pi . Picking the first k
Pk
∗
items is a feasible solution, so i=1 pi ≤z . Picking just the k +1th item is also feasible,
Pk
∗
∗
so pk+1 ≤ z ∗ . Therefore, zL =
i=1 pi /2 + pk+1 /2 ≤ z . On the other hand, z ≤ 2zL
by the Lemma 2.2.1. Combining the two inequalities, we have zL ≤ z ∗ ≤ 2zL and zL is
a half-approximation of the optimal objective value z ∗ .
17
2.2.2
Rounding Down the Profits
We say that item i is cheap if pi < zL and expensive otherwise. We would like to
scale down the expensive profits like this: p0i = bpi /δc so that it introduces at most multiplicative error. We have
pi − δp0i = pi − δbpi /δc < δ = pi ·
δ
δ
< pi ·
pi
zL
so the multiplicative error from the rounding is at most zδL . Let’s pick δ = 2 zL .
Now our optimal solution will have multiplicative error of at most within the set of
expensive items. It will have additive error of at most zL within the set of cheap items,
because of the Lemma 2.2.1. Combined, the overall error should be bounded by 3zL .
2.2.3
Algorithm
0-1 Knapsack Approximation Algorithm (Ibarra and Kim)
Initial sorting and rounding
Sort the items
P such that
P pi /wi ≥ pi+1 /wi+1 for all i ∈ [1, n − 1].
zL = max{ i≤k+1 pi : i≤k wi ≤ C}/2.
Let Scheap := {i ∈ N : pi < zL } and Sexpensive = N \Scheap .
Let δ = 2 zL .
For i in Sexpensive : p0i = bpi /δc.
Let P 0 = b2zL /δc,
Dynamic programming on expensive items
Without loss of generality, let Sexpensive = [1, m].
Let G(0, 0) = 0.
For p0 from 1 to P 0 : G(0, p) = ∞.
For i from 1 to m:
For p0 from 0 to P 0 :
G(i, p0 ) = min {G(i − 1, p0 ), G(i − 1, p0 − p0i ) + wi }.
Greedy on cheap items
Let bbest = 0
For p0 from 0 to P 0 :
P
P
0
0
Find k such that
G(m,
p
)
+
w
≤
C
<
G(m,
p
)
+
i
m<i≤k
m<i≤k+1 wi .
P
P
0
0
If bbest < δp + m<i≤k pi , then bbest = δp + m<i≤k pi .
Return bbest .
18
The bottlenecks in running time are the sorting (which takes O(n log n) time) and the
dynamic programming (which takes O(mP 0 ) = O(n−2 ) time). Therefore, the run-time
is O(n log n + n−2 ). However, note that an optimal solution cannot have more than
P 0 /p0i items with rounded profit p0i . Thus it is sufficient to consider only P 0 /p0i items of
the same rounded profit with less weight. The total number of items to consider is at
most
Z 1/2
1/2
X
0
0
0
1/xdx = −2 log(1/)
bP /pi c ≈ P
p0i =1/
x=1/
Therefore, the run-time can be improved to O(n log n + −4 log 1 ).
2.3
Lawler
Lawler’s work in 1979 [5] introduces two tweaks to the algorithm proposed by Ibarra
and Kim. The first idea is to more aggressively round profits that are large by gradually increasing the rounding factor depending on the size of the individual profit. The
second idea eliminates the sorting by density, improving the first term of the runtime from O(n log n) to O(n min(log n, log 1 )). The overall run-time ends up being
O(n min(log n, log(1/)) + −4 ).
2.3.1
Modification of the Dynamic Program
Because of the progressive rounding used in Lawler’s algorithm, it is harder to work
with the previous dynamic program where functions are defined on [0, b] for some b. We
will be skipping values as the profits increase to further reduce the number of possible
profits and thus speeding up the algorithm.
Instead of keeping track of a function of profits to minimum weight subject to the
profit requirements, we will now keep track of list of sets that are extreme points on
the boundary of the feasible set. Initially, the
P list only
P has (0, 0). As we iterate over
the items, the list will contain pairs of form i∈S pi , i∈S wi for some set S ⊆ N . On
iteration i, make a new list by creating a pair (b + pi , c + wi ) for each pair (b, c), and
then merge the new list into the list. If we keep this up, we end up with 2n pairs that
list all possible feasible solutions. This is obviously bad, so we will trim the list at every
iteration during merge so that pairs that are dominated are removed. To be precise,
if both (b, c) and (b0 , c0 ) are in the list where c0 ≥ c and b0 ≤ b, then the pair (b0 , c0 )
is removed. Additionally, we can remove (b, c) such that c are greater than the given
capacity C. At the end of all iterations, the optimal value can be found by locating the
pair (b, c) with the largest c.
19
Example 2.3.1. Suppose n = 3, C = 15, p1 = 100, p2 = 120, p3 = 140, and w1 =
7, w2 = 6, w3 = 8. Then the list is
Iteration
Iteration
Iteration
Iteration
0:
1:
2:
3:
(0,0)
(0,0), (100, 7)
(0,0), (120, 6), (100, 7), (220, 13)
(0,0), (120, 6), (140, 8), (220, 13), (260, 14), (360, 21)
Thus the optimal value is 260.
This algorithm may be written differently, but it is in fact same as the previous
dynamic programming algorithm. The only difference is that only the extreme points
are stored, opposed to storing every point of the function. The run-time is the same:
O(n2 P ).
The optimal solution can be encoded on this list by keeping a pointer to the “parent”
pair as before. We omit the detail on retrieving the optimal solution and the space
complexity here, but it can be found in Lawler’s paper in detail.
2.3.2
Progressive Rounding
Recall the integral in the analysis of the run-time of the Ibarra and Kim’s algorithm.
Let’s take a more close look at this counting of relevant expensive items.
The rounded profits lie in the interval [1/, 1/2 ). In the interval [1/, 2/), having more than P 0 /(1/) = 1/ of items of each profit is not useful because their total
profit will exceed the optimal bound P 0 . Thus, we only care for (1/)(1/) = 1/2 items
in this interval, and the heavier items can be discarded without consideration. Similarly, the interval [2/, 4/) has (2/)(1/(2)) = 1/2 relevant items and [4/, 8/) has
(4/)(1/(4)) = 1/2 and so on. Thus, the total number of expensive items that are
relevant is O(−2 log 1 ). This is what the integral approximated.
Lawler observed that more expensive items can be rounded more aggressively so that
the number of possible profits is smaller. This would bring down the number of relevant
items and thus improving the run-time. Instead of rounding p0i = bpi /δc uniformly, let
p0i = bpi /(2k δ)c2k for pi ∈ [2k /, 2k+1 /), rounding progressively with bigger factor as the
profits increase. Since the relative error of the rounding is still less than , the previous
proof that bounds the approximation solution is still intact.
In the improved rounding, the interval [1/, 2/) still has all the profits so it has 1/2
relevant items. But the next interval [2/, 4/) only has 1/ possible profits, bringing
down the number of relevant items to 1/(22 ). The total number of expensive items
becomes O(−2 ), saving a log 1 factor.
20
2.3.3
Elimination of Sorting
In Ibarra and Kim’s FPTAS, the sorting of the items by profit-weight density served
two roles:
1. Computation of half-optimal value, thus allowing us to compute the profit threshold and scale factor.
2. Approximation of knapsack sub-problems involving cheap items by using greedy
algorithm.
We will now show that these two tasks can be performed without sorting.
To get the half-optimal value, we start by computing the density pi /wi for all items
in O(n) time. Next, get the median of the densities in O(n) time. Say d1 is the median.
Calculate
X
wi ,
pi /wi >d1
which is a sum of weights of all items with density above the median. If this sum is greater
than the capacity C, then get the median d2 of the densities in the set {i : pi /wi > d1 }
in time O(n/2). Otherwise get the median d2 of the densities in the set {i : pi /wi ≤ d1 }
in time O(n/2). Continue to evaluate the medians in this binary searching manner until
the item that causes the greedy selection to go over the capacity is found. Since the
medians are evaluated over the sets of size n, n/2, n/4, · · · , the whole procedure takes
O(n) time. Therefore, we computed the half-optimal value in O(n) time.
We could use the same median-find trick for the approximation of sub-problems
involving cheap items. However, unlike the task of finding half-optimal value which is
one-time deal, the sub-problems have to be solved for each pair that is left in the final
iteration of the modified dynamic program. Luckily, these sub-problems are all defined
on the same set of cheap items, difference only being the target capacity. So it can share
medians that were found in other sub-problems.
The number of pairs m is at most O(−2 ) as we just showed from the previous section.
In the worst case, each pairs will take completely different traversal of the binary search,
forcing us to compute every median possible up to the depth log m. Therefore, the
overall time for solving the sub-problems for all pairs is bounded by O(n log 1 ).
2.4
Kellerer and Pferschy
Lastly, we look at the latest FPTAS by Kellerer and Pferschy [3], which has the runtime of O(n min(log n, log(1/)) + −3 log 1 ) time. Their paper is largely concerned with
retrieval of the optimal solution after evaluating the approximate optimal objective
value, and doing so in a small space. However, we will focus on how the approximate
optimal objective value is reached.
21
2.4.1
Progressive Rounding
Kellerer and Pferschy also uses a type of progressive rounding found in Lawler’s algorithm so that the total number of expensive items to consider is at most O(1/2 ).
However, their setup is little more involved as their rounding method has more bearing
on the run-time of their modified dynamic program.
As before, the rounded profits are in the interval [1/, 1/2 ). Let’s assume that 1/
is an integer (otherwise, make new equal to 1/d 1 e). Break this interval into 1/ − 1
equally sized intervals:
Ij := [j/, (j + 1)/),
for j = 1, 2, · · · , 1/ − 1. Then each Ij is broken into d1/(j)e roughly equally sized
intervals:
Ijk := [j(1 + (k − 1)), j(1 + j)) ∩ Ij ,
for k = 1, 2, · · · , d1/(j)e.
All expensive profits lie in exactly one Ijk . We perform additional rounding, rounding
down all the profits in the interval Ijk to the smallest integer profit in the interval. It
can be observed that this rounding incurs at most relative error for each profit.
Example 2.4.1. Suppose that = 1/5 and zL = 1000. Then the expensive profits
[ 51 · 1000, 1000) is partitioned into the following intervals
I1 = [200, 400), I2 = [400, 600), I3 = [600, 800), I4 = [800, 1000),
and
I11 = [200, 200(1 + 1/5)), I12 = [200(1 + 1/5), 200(1 + 2/5)), I13 = [200(1 + 2/5), 200(1 + 3/5)),
I14 = [200(1 + 3/5), 200(1 + 4/5)), I15 = [200(1 + 4/5), 400),
I21 = [400, 400(1 + 1/5)), I22 = [400(1 + 1/5), 400(1 + 2/5)), I23 = [400(1 + 2/5), 600),
I31 = [600, 600(1 + 1/5)), I32 = [600(1 + 1/5), 800),
I41 = [800, 800(1 + 1/5)), I42 = [800(1 + 1/5), 1000),
partition I1 , I2 , I3 , I4 into 5, 3, 2, 2 intervals, respectively.
Consider I1 . We only need to consider 2/ least weight items for each profit value in
I1 . The profits in I1 round down to d1/e, so we have roughly 2/2 relevant items with
profit in I1 . Similarly, the number is 222 ·1/2 for I2 and 322 ·1/2 for I3 and so on. Therefore,
P1/−1 2
the total number of relevant expensive items is roughly j=1
· 1/2 = O(1/2 ).
j2
22
2.4.2
Improving the Dynamic Program
Recall again, how the dynamic programming was done. We iterated on the items and on
each iteration for an item, we updated the solution for all possible profits. This resulted
in the run-time of O(n · U ) where n is the number of items to iterate over (which was
O(1/2 ) in the previous algorithm) and U is the size of the range of profits to consider
(which also was O(1/2 ) in the previous algorithm).
Their improvement on the run-time comes from the fact that we can process the
items with same profit at the same time, resulting in smaller run-time. Let G(p) be the
minimum total weight given the constraint that the total profit is at least p, for some
˙ , where T is
set of items S. We now describe how to update G(p) to a set of items S ∪T
a set of items that has the same profit.
Without loss of generality, let T = {1, 2, · · · , m}, p1 = p2 = · · · = pm = q, w1 ≤
w2 ≤ · · · ≤ wm .
For p from 0 to U : alreadyU pdated(p) = false.
For p from 0 to U − q:
If alreadyU pdated(p) = false and G(p + q) > G(p) + w1
Gold (p + q) = G(p + q)
G(p + q) = G(p) + w1
alreadyU pdated(p + q) = true
numN ewItems = 1
l=1
While p + (l + 1)q ≤ U and numN ewItems ≤ m
WnextItem = G(p + lq) + wnumN ewItems+1
WstartOver = Gold (p + lq) + w1
Wold = G(p + (l + 1)q)
l =l+1
Gold (p + lq) = G(p + lq)
Compare WnextItem , WstartOver , Wold
If WnextItem is the smallest
G(p + lq) = WnextItem
alreadyU pdated(p + lq) = true
numN ewItems = numN ewItems + 1
Else if WstartOver is the smallest
G(p + lq) = WstartOver
alreadyU pdated(p + lq) = true
numN ewItems = numN ewItems + 1
Else if Wold is the smallest
Break
23
The variable alreadyU pdated makes sure that no solution is updated twice. Thus
this update runs in O(U ) time, and has no dependence on the number of items m. The
new run-time becomes O((number of distinct profits)·U ) from O((number of items)·U ).
There are O(−1 log 1 ) distinct expensive profits in the rounding of the previous section.
So we can achieve the run-time of O(n min(log n, log(1/)) + −3 log 1 ).
Another note-worthy work is by Magazine and Oguz [7] [6], in which they achieve
the run-time of O(nC log n), where C is the capacity of the knapsack.
24
Chapter 3
Framework for Knapsack FPTAS
We will now establish a framework in which FPTAS for Knapsack Problems can be
developed. We will focus on the 0-1 Knapsack Problem to illustrate our approach.
3.1
-Inner Approximations
Recall that the 0-1 Knapsack Problem has the following form
max f (c) =
X
s.t.
X
p i xi
i∈N
w i xi ≤ c
i∈N
xi ∈ {0, 1} for all i ∈ N.
To get an approximate solution quickly, we will want to manipulate pi , as we saw
in the previous chapter. However, wi ’s cannot be changed as that would affect the
feasibility.
It would be much easier if we could fiddle with the constraints and work with fixed
objective value. As we saw in the previous chapter, dynamic programming approaches
work by keeping track of solutions corresponding to all possible profits. Thus, we will
aim to work with this problem instead:
min g(b) =
X
w i xi
i∈N
s.t.
X
p i xi ≥ b
i∈N
xi ∈ {0, 1} for all i ∈ N.
25
In this re-formulation, we would keep the objective value fixed, but the constraint
would be subject to rounding. We will now make a simple setup so that we can do
precisely that.
3.1.1
Upper and Lower Inverse
If the above f (c) and g(b) are strictly monotone functions, then they are inverses of each
other. It is true that f (c) and g(b) are monotone, but its monotonicity is typically not
strict. So let’s define a notion of “inverse” for functions that are monotone.
Let f be a non-decreasing function with domain D and range R. We define the
upper inverse of function f to be the function g with domain R and with range D as
follows:
For every b ∈ R, g(b) = min{c ∈ D : f (c) ≥ b}.
We define the lower inverse of function f to be the function g with domain R and
with range D as follows:
For every b ∈ R, g(b) = max{c ∈ D : f (c) ≤ b}.
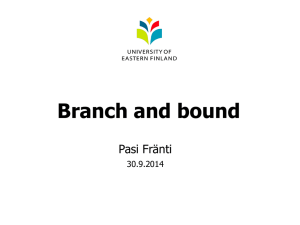
Example 3.1.1. Below are plots of an example function f (c) and its upper and lower
inverse.
b
b
9
8
7
6
5
4
3
2
1
0
c
0123456789
f (c)
b
9
8
7
6
5
4
3
2
1
0
c
0123456789
The upper inverse of f (c)
9
8
7
6
5
4
3
2
1
0
c
0123456789
The lower inverse of f (c)
If f is a strictly increasing function, then upper and lower inverse of f is simply the
inverse of f .
The following is an elementary property of the lower and upper inverse.
Lemma 3.1.2. Suppose that f (c) is a monotonically non-decreasing function. Let g be
the upper inverse of f . Then f is the lower inverse of g.
26
Proof. Suppose that f (c) = b0 for c ∈ [l, u] and f (l − 1) < b0 < f (u + 1). Then
g(b0 ) = l. If b > b0 , then g(b) > u. If b < b0 , then g(b) < l. Let h be the upper inverse
of g.
It follows that h(l) = max{b : g(b) ≤ l} = b0 . Moreover, h(u) = max{b : g(b) ≤ u} =
b0 . Because h is monotone, h(c) = f (c) for c ∈ [l, u], completing the proof.
The converse is also true by the same proof: if g is the lower inverse of f , then f is
the upper inverse of g.
3.1.2
-Inner Approximations
We now have the upper inverse of f (c), which is g(b). If we want to compute f (c), we
can compute g(b) instead and then take the lower inverse to get the answer. However,
our goal is to approximate f (c). So we must figure out what it means to approximate
the lower inverse. This is what -inner approximations do.
Let f be any non-decreasing integer valued function. We say that fe is an -approximation of f if (1 − )f (c) ≤ fe(c) ≤ f (c) for all c.
Let g be any non-decreasing integer valued function. We say that ge is an -innerapproximation of g if for all b, ge(d(1 − )be) ≤ g(b) ≤ ge(b).
Lemma 3.1.3. Suppose that f is a monotonically non-decreasing function, and that g
is the upper inverse of f . Suppose that ge is an -inner-approximation of g, and that fe
is the lower inverse of ge. Then fe is an -approximation of f .
Proof. Suppose that f (c) = b0 for c ∈ [l, u] and f (l − 1) < b0 < f (u + 1). Then
g(b0 ) = l. If b > b0 , then g(b) > u. If b < b0 , then g(b) < l. By assumption,
ge(d(1 − )b0 e) ≤ g(b0 ) ≤ ge(b0 ) = l.
Then for c ∈ [l, u] , fe(c) = max{b : ge(b) ≤ c} ≥ d(1 − )b0 e. This completes the proof.
Because of Lemma 3.1.3, we can work with -inner-approximation of the upper inverse
in order to find an -approximation of the original function.
3.2
Floating Point Arithmetic
As we saw from the survey of previous results, one major technique utilized in FPTAS
for Knapsack Problems is to round the profits down to a set of values that are globally
geometrically increasing. When this is done to a set of numbers in the interval [0, B],
the number of possible values goes down from O(B) to O(log B). The downside of the
technique is that it is hard to work with and the analysis becomes very ugly. Keller and
Pferschy chose their scaling so that the values are locally linear and globally geometrical, however their method still introduced complicated terms for the resulting rounded
profits.
27
We propose that it is simpler to use floating point numbers. Instead of rounding
down profits to
1
1+
8
m = {1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 15, 16, 19, 21, 24, 27, · · · },
we will round down the profits to
{u · 2v : u < 8} = {1} ∪ {2, 3} ∪ {4, 5, 6, 7} ∪ {8, 10, 12, 14} ∪ {16, 20, 24, 28} ∪ · · · .
We say that integer a is a floating point integer with at most K bits if a can be
represented in the form u×2v , where u and v are both integers, and 0 ≤ u < 2K . Integer
u is called the mantissa, and v is called the exponent. We also write that a ∈ Float(K).
Integers in Float(K) may have multiple representations; e.g., 48 ∈ Float(4) has three
distinct representations; 48 = 3 × 24 = 6 × 23 = 12 × 22 . We say a = u × 2v is written
in the canonical form if 2K−1 ≤ u ≤ 2K − 1, i.e. has the maximum possible mantissa.
Any integer in Float(K) has a unique canonical form.
Suppose that a is a nonnegative real number. Then bacK is defined as max{a0 : a0 ≤
a and a0 ∈ Float(K)}. That is, bacK is the largest K-bit Floating point integer that is
at most a. Similarly, we say daeK = min{a0 : a0 ≥ a and a0 ∈ Float(K)}.
We say that g ∈ Step(K) if g(b) = g(dbeK ) for all b in the domain of g. We call such
g a K-step function.
Suppose that g is a non-decreasing function. Let dgeK be the function g 0 defined
as follows: for all b, g 0 (b) = g(dbeK ). Then g 0 is the minimum function such that
g 0 ∈ Step(K) and g 0 ≥ g. Clearly, g 0 is a step function, where steps only take place on
values b ∈ Float(K).
Lemma 3.2.1. Suppose that g is a non-decreasing function, K ∈ Z, and that ≥ 2−K+1 .
Then the function dgeK is an -inner-approximation of g.
Proof. Clearly, g(b) ≤ g(dbeK ) = dgeK (b). It remains to show that g(d(1 − )beK ) ≤
g(b). Suppose that d(1 − )beK = u × 2v for some 2K−1 ≤ u ≤ 2K − 1. Then
v
(1 − )b > (u − 1) × 2 =
1
1−
u
·u×2 ≥ 1−
thus b > d(1 − )beK and we are done.
28
v
1
2K−1
d(1 − )beK
3.3
Exact Merging
We get back to our Knapsack Problem. Let fS (c) be the optimal value function for the
0-1 Knapsack problem, as restricted to variables whose index is in subset S. That is,
for c ∈ [0, C],
X
fS (c) = max
p i xi
i∈S
s.t.
X
w i xi ≤ c
i∈S
xi ∈ {0, 1} for all i ∈ S.
We let gS () be the upper inverse of fS (). That is, for some upper bound B on the
objective value (B for budget), and for b ∈ [0, B],
X
gS (b) = min
w i xi
i∈S
s.t.
X
p i xi ≥ b
i∈S
xi ∈ {0, 1} for all i ∈ S
Recall that fS () can be approximated by taking the lower inverse of an -inner approximation of its upper inverse, gS (). Before we get to computing an -inner approximation
of gS (), we will look at how to compute gS () exactly.
3.3.1
Merging Relation
The function gS∪T () can be obtained from gS () and gT () where S and T are disjoint sets.
Below lemma shows how:
Lemma 3.3.1. Suppose that S and T are disjoint subsets of N . Then gS∪T () is obtained
from gS () and gT () as follows. For all b ∈ [0, B],
gS∪T (b) = min{gS (b0 ) + gT (b − b0 ) : b0 ∈ [0, b]}.
(3.3.1)
We say that gS () satisfies merging relation if (3.3.1) holds. We write gS∪T =
Merge(gS , gT ).
The merging relation can be seen in other variants of knapsack problem as well.
Upper inverse gS (b) tend to satisfy the merging relation if it is the upper inverse of
fS (c), which is a knapsack problem on the set of items S where c is the capacity of
knapsack. This is because gS (b) will turn out to be a problem of minimizing total
weight while guaranteeing a profit of b. Thus the minimization problem of gS∪T (b) can
be solved by finding the best way to split the profit requirement b between S and T and
then by adding up the minimum objective value gS (b0 ) and gT (b − b0 ).
29
3.3.2
MergeAll Procedure
If gS () satisfies merging relation, then we can merge gS () for any number of disjoint sets.
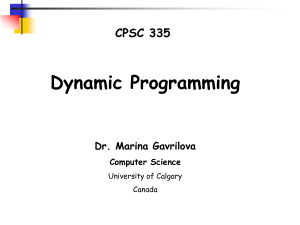
Suppose S1 , S2 , · · · , Sm are disjoint, and gSi () are known. We assume that m is a
power of 2 for simplicity of presentation, and let Si1 := Si for notational convenience.
Our algorithm will consist of log m iterations. At the kth iteration, compute gS k+1 () for
i S
k
k
by merging gS2i−1
and gS2ik . The end result is gS () where S = i Si .
Sik+1 := S2i−1
∪ S2i
k
First iteration
gS11
gS21
gS31
gS41
gS51
gS61
gS71
gS81
Second iteration
Third iteration
gS12
gS13
gS22
gS14
gS32
gS23
gS42
Procedure MergeAll({g1 , · · · , gm })
INPUT:
A set of m non-decreasing functions {g1 , · · · , gm }.
OUTPUT:
A non-decreasing function g that is the merging of g1 , · · · , gm
PROCEDURE:
gi1 = gi for all i ∈ [1, m]
For r from 1 to log m
For j from 1 to m/2r
r
r
gjr+1 = Merge(g2j−1
, g2j
)
(log m)+1
Return g1
30
3.4
Approximate Merging
With MergeAll, we now have means to compute gS (). However, this is too slow. We
will now see how we can speed up the procedure by computing an -inner approximation
of gS () instead.
3.4.1
ApproxMerge Procedure
With Lemma 3.3.1 in mind, we define an operation called ApproxMerge.
Procedure ApproxMerge(e
g1 , ge2 , K)
INPUT:
Non-decreasing functions ge1 and ge2 , and integer K. Let [L, U ] denote the domains
of ge1 and ge2 .
OUTPUT:
A non-decreasing function ge ∈ Step(K) with domain [L, U ] that approximates the
merging of ge1 , ge2
PROCEDURE:
For all b ∈ Float(K) ∩ [L, U ], do
Let b = u × 2v where u ∈ [2K−1 , 2K − 1] (i.e. the canonical form of b)
ge(b) = min{e
g1 (u1 × 2v ) + ge2 (u2 × 2v ) : u1 + u2 = u, u1 , u2 ∈ N0 },
where ge1 (0) and ge2 (0) are defined as 0.
The major time saving comes from the fact that the output is a step function, instead
it being computed over all of [L, U ]. This reduces the number of b’s to consider from
O(U − L) to O(2K log(U/L)). Another time saving is that for each b, the running time
to compute ge(b) is O(2K ) rather than O(2K log(U/L)). So we save a factor of log(U/L)
over the method in which b0 can vary over all possible elements of Float(K). The overall
run-time of ApproxMerge is O(4K log(U/L)).
Theorem 3.4.1. . The two sets S and T are disjoint and g is a function satisfying the
merging relation. Suppose that geS and geT are -inner approximations of gS and gT for
gS , geT , K). Then
some > 0. Let geS∪T () be the function obtained by ApproxMerge(e
−K+4
geS∪T () is a ( + 2
)-inner approximation of gS∪T ().
Proof.
We have the merging relation: gS∪T (b) = min{gS (b0 ) + gT (b − b0 ) : b0 ∈ [0, b]}. Since
geS (·) ≥ gS (·) and geT (·) ≥ gT (·), it follows that geS∪T (·) ≥ gS∪T (·). It remains to show
that gS∪T (b) ≥ geS∪T (a) for some a ≥ (1 − − 2−K+4 )b
Suppose now the case that b ∈ Float(K), and b0 is chosen so that gS∪T (b) = gS (b0 ) +
gT (b − b0 ). Without loss of generality, lets assume that b0 ≥ b/2.
31
Clearly,
gS∪T (b) = gS (b0 ) + gT (b − b0 )
≥ geS (d(1 − )b0 eK ) + geT (d(1 − )(b − b0 )eK ).
Let uS × 2vS and uT × 2vT be the canonical form of d(1 − )b0 eK and d(1 − )(b − b0 )eK ,
respectively. Then
uS × 2vS = d(1 − )b0 eK ≤ dbeK ≤ (1 + 2−K+1 )b ≤ 2b
and uS ≥ 2K−1 , thus 2vS ≤ b · 2−K+2 .
Recall that we want a such that gS∪T (b) ≥ geS∪T (a) and w ≥ (1 − − 2−K+4 )b. The
first inequality will be satisfied if a = (αS + αT ) × 2v where αS + αT ∈ [2K−1 , 2K − 1],
αS × 2v ≤ uS × 2vS , and αT × 2v ≤ uT × 2vT .
If aS + baT · 2vT −vS c ≤ 2K − 1, then we simply let αS = uS and αT = buT · 2vT −vS c:
gS∪T (b) ≥ geS (uS × 2vS ) + geT (uT × 2vT )
≥ geS (uS × 2vS ) + geT (buT × 2vT −vS c × 2vS )
≥ geS∪T ((uS + buT × 2vT −vS c) × 2vS ).
and
≥
=
=
≥
≥
(uS + buT · 2vT −vS c) × 2vS
(uS + uT · 2vT −vS ) × 2vS − 2vS
uS × 2vS + uT × 2vT − 2vS
d(1 − )b0 eK + d(1 − )(b − b0 )eK − 2vS
(1 − )b0 + (1 − )(b − b0 ) − 2vS
(1 − )b − 2vS
≥ (1 − − 2−K+2 )b.
If uS + buT · 2vT −vS c > 2K − 1, then
gS∪T (b) ≥ geS (uS × 2vS ) + geT (uT × 2vT )
≥ geS (buS /2c × 2vS +1 ) + geT (buT × 2vT −vS −1 c × 2vS +1 )
≥ geS∪T ((buS /2c + buT × 2vT −vS −1 c) × 2vS +1 ).
and
≥
=
=
≥
(buS /2c + buT × 2vT −vS −1 c) × 2vS +1
(uS /2 + uT · 2vT −vS −1 ) × 2vS +1 − 2 · 2vS +1
uS × 2vS + uT × 2vT − 2vS +2
d(1 − )b0 eK + d(1 − )(b − b0 )eK − 2vS +2
(1 − )b0 + (1 − )(b − b0 ) − 2vS +2
≥ (1 − )b − 2βS +2
≥ (1 − − 2−K+4 )b.
32
In both cases, we conclude that gS∪T (b) ≥ geS∪T (d(1 − − 2−K+4 )beK ).
3.4.2
ApproxMergeAll Procedure
Finally, we describe how to merge m -inner approximations of gSi to obtain an O()inner approximation of g∪i Si . This is done just like MergeAll.
Procedure ApproxMergeAll({e
g1 , · · · , gem }, K)
INPUT:
A set of m non-decreasing functions {e
g1 , · · · , gem } and integer K.
OUTPUT:
A monotonically non-decreasing function ge that approximates the merging of
ge1 , · · · , gem
PROCEDURE:
gei1 = gei for all i ∈ [1, m]
For r from 1 to log m
For j from 1 to m/2r
r
r
gejr+1 = ApproxMerge(e
g2j−1
, ge2j
, K + 3 + dr/3e)
(log m)+1
Return ge1
The noteworthy part of this procedure is that the mantissa accuracy at rth iteration
is K + 3 + dr/3e, which is slowly increasing. If we fix this to some constant (say K), then
the error from each iteration will sum to O(log m). This is no good since m could be as
big as n. We could instead increase the number of mantissa by one at every iteration
(say K +r) to combat this. Then the error from each iteration is bounded by a geometric
sequence and they will sum to a constant. However, the running time of ApproxMerge is
O(4K ) in terms of K. Thus the running time for the entire procedure would be too high.
It turns out that increasing the number of mantissa every three iteration is a way to 1)
keep the error constant and yet 2) keep the running time low. The next two theorems
will prove these two facts.
Theorem 3.4.2. . Let S1 , · · · , Sm be disjoint sets and {gSi : i ∈ [1, m]} be a set of
functions that satisfies the merging relation. Suppose that geSi are -inner approximations
gSi :
of gSi for some > 0. Let ge∪i Si () be the function obtained by ApproxMergeAll({e
−K
i ∈ [1, m]}, K). Then ge∪l Sl () is a ( + 2 )-inner approximation of g∪l Sl ().
Proof. By theorem 3.4.1, the error introduced at r = 3t − 2, 3t − 1, 3t is 2−K−2−t . That
is, geS (b) is an + 3 · 2−K−3 -inner-approximation of gS (b) after three rounds of iteration,
+ 3 · 2−K−3 + 3 · 2−K−4 -inner-approximation after three more rounds of iteration and
so on. After log m rounds of iteration, we obtain ge∪i Si (b) which is
+ 3 · 2−K−3 + 3 · 2−K−4 + · · · ≤ + 3 · 2−K−2 < + 2−K
-inner-approximation of g∪i Si (b).
33
Theorem 3.4.3. . Let S1 , · · · , Sm be disjoint sets and {gSi : i ∈ [1, m]} be a set
of functions with domain [L, U ]. Then ApproxMergeAll({gSi : i ∈ [1, m]}, K) has a
running time of O(m · 4K log(U/L)).
Proof. Recall that ApproxMerge(g1 , g2 , K) runs in O(4K log(U/L)) time. Hence, the rth
iteration runs in O(m/2r · 4K log(U/L)) time. In total, the run-time of ApproxMergeAll
is
O(m · 4K+1 log(U/L) + m/2 · 4K+1 log(U/L) + m/4 · 4K+1 log(U/L)
+m/8 · 4K+2 log(U/L) + m/16 · 4K+2 log(U/L) + m/32 · 4K+2 log(U/L)
+···)
=O(m4K log(U/L)(7/4 · 4 + 7/32 · 42 + 7/256 · 43 + · · · ))
=O(m4K log(U/L)).
If accessing a value of gei (b) takes O(α) time, then the above time increases to
O(m4K α log(U/L)).
3.5
Outline of Knapsack Algorithms
Before we show specific algorithms for various knapsack problems, we will first present
the general approach we take for our FPTAS. While the details will differ, the overall
idea for all FPTAS presented in this paper is very similar.
3.5.1
Outline of an Exact Algorithm
The rough outline of the algorithm given below yields an exact optimal solution to
Knapsack Problems. We present it as a preparation before getting to the approximate
algorithm.
Let fS (c) be the function of the optimal objective value to a knapsack problem of
our choice, where S is the set of items we can pick from and c is a parameter denoting
the capacity of the knapsack. Our goal is to find fN (C).
Instead of figuring out what fN (c) is, we will compute its upper inverse gN (b). The
function gN () can be obtained by merging g{i} () for all i ∈ N . Since g{i} () is trivial to
compute for any Knapsack Problem, we are done.
The outlined sketch of algorithm only returns the optimal objective value. The
corresponding optimal solution can be retrieved if the budget split at every single merge
is tracked (that is, for every Merge: gS∪T (b) = min{gS (b0 ) + gT (b − b0 ) : b0 ∈ [0, b]}, we
store b0 ). When the algorithm terminates, one can back-track from gN () to g{i} ()’s in
order to find which items were used to get the optimal objective value. We leave the
problem of optimizing the space complexity.
34
3.5.2
Outline of a FPTAS
The above exact algorithm can be modified to an approximate algorithm. Instead of
merging g{i} ()’s exactly using MergeAll, we will use ApproxMergeAll. Then the resulting function geN () is an -inner approximation of gN (). Taking the lower inverse of geN ()
yields a -approximation of fN ().
If the above idea is implemented naively, then the run-time of ApproxMergeAll will
involve O(log B) term, which we do not want for FPTAS. Thus we need to limit the
number of exponents used in ApproxMerge from O(log B) to a fully polynomial function.
In another words, we do not want work with Float(K)∩[0, B] as the domain of gS (b), but
instead restrict the domain to Float(K) ∩ [L, U ] for some L and U such that log(U/L)
is fully polynomial in n.
We achieve this by separately dealing with items with small profit before we perform
ApproxMergeAll. Pick a profit threshold L. We say an item is cheap if pi < L. Let
Scheap be the set of cheap items and Sexpensive be the set of expensive items. Then
gScheap is approximated using greedy algorithm and gSexpensive is inner-approximated using
ApproxMergeAll as we discussed. Finally, we merge the two approximations of gScheap
and gSexpensive to get an O()-inner approximation of gN . The restriction to the domain
[L, U ] can be determined by getting an rough bound on the optimal objective value.
Below is the general outline of our FPTAS of knapsack problems, summarizing all
of the above:
Step 1: Initial sorting
Get a rough bound on the optimal objective value z ∗ . A decent bound can often be
found by sorting the items by density and then using greedy algorithm. Let zL ≤ z ∗ ≤
q(n)zL for a polynomial q(n).
Step 2: Dealing with cheap items
An item is cheap if pi < zL /r(n) for some polynomial r(n). Let Scheap be the set
of cheap items and Sexpensive be the set of expensive items. Compute geScheap (), an
approximation of gScheap () by greedy algorithm. This approximation only has to be
good enough so that the additive error is at most O(zL ).
Step 3: Solving for expensive items
This step is the crux of our algorithm. For each expensive profit p, compute g{i:pi =p} ().
Use ApproxMergeAll to get geSexpensive (), an O()-inner approximation of gSexpensive ().
ApproxMergeAll is quick enough, as the domain of geS (b) is [zL /r(n), q(n)zL ] instead
of [0, B].
Step 4: Final Merge
Finish up by merging geScheap () and geSexpensive (). The optimal objective value z ∗ is approximated by max{b : geScheap (b0 ) + geSexpensive (b − b0 ) ≤ C}.
35
Note that in Nonlinear Knapsack Problem and Multiple-Choice Knapsack Problem,
we skip over step 2 and step 4 by simply ignoring cheap profits.
The outlined sketch of algorithm only returns the approximate optimal objective
value. Just as in the exact algorithm, the corresponding approximate optimal solution
can be retrieved if the budget split at every single merge is tracked.
Lastly, initial g{i:pi =p} (b) may not have to be computed for every b ∈ Float(K)∩[L, U ].
This is unlike subsequent calculations of geS , of which every geS (b) for all b ∈ Float(K) ∩
[L, U ] is stored in memory. Any data structure can be used to represent g{i:pi =p} (b)
without affecting correctness of the algorithm, but its construction time and query time
will affect the overall run-time. For instance, g{i:pi =p} (b) may turn out to be a linear
function in some knapsack problem. Then we do not need to evaluate the function value
at every b ∈ Float(K) ∩ [L, U ]. Just storing a slope and a point is sufficient, and a value
of the function can be queried in constant time. This may save time in some cases.
36
Chapter 4
Knapsack Approximation
Algorithms
4.1
4.1.1
Nonlinear Knapsack Problem
The Upper Inverse
The Nonlinear Knapsack Problem is as follows:
X
max
pi (xi )
i∈N
s.t.
X
xi ≤ C
i∈N
xi ∈ N0 for all i ∈ N
We let
fS (c) = max
X
s.t.
X
pi (xi )
i∈S
xi ≤ c
i∈S
xi ∈ N0 for all i ∈ S
and gS () be the upper inverse of fS ().
X
gS (b) = min
xi
i∈S
s.t.
X
pi (xi ) ≥ b
i∈S
xi ∈ N0 for all i ∈ S
37
This gS () satisfies the merging relation, thus theorem 3.4.1 and theorem 3.4.2 is applicable to gS ().
4.1.2
Profit Threshold
To get started, we let zL be a lower bound on the optimal objective function, where zL
is defined as follows: zL = max{pi (C) : i ∈ N }. The following lemma is a consequence
of our definition.
Lemma 4.1.1. Let z ∗ denote the optimal objective value for the non-linear knapsack
problem. Then
n
X
∗
zL ≤ z ≤
pi (C) ≤ nzL .
i=1
In order to limit the domain of the functions gS , we will replace pi () by p0i (), where
for each i ∈ N , and for each c ∈ [0, C],
(
0
if pi (c) < zL /n
p0i (c) =
.
pi (c) otherwise
Let z 0 be the optimal objective value for the knapsack problem with pi replaced by p0i .
Then for all i and c,
pi (c) − zL /n ≤ p0i (c) ≤ pi (c)
and thus (1 − )z ∗ ≤ z 0 ≤ z ∗ .
4.1.3
Algorithm
Nonlinear Knapsack Approximation Algorithm
zL = max{pi (C) : i ∈ N }.
For each i ∈ N and c ∈ [0, C]
if pi (c) < zL /n then p0i (c) = 0
Choose K so that 2K < 1/ < 2K+1 .
For each i ∈ N and for each b ∈ Float(K) ∩ [zL /n, nzL ]
ge{i} (b) = min{c : p0i (c) ≥ b}
geN = ApproxMergeAll({e
g{i} : i ∈ N }, K)
4.1.4
Correctness
As mentioned above, replacing p by p0 introduces an absolute error of at most zL /n,
and thus introduces a relative error of at most in the final solution. Henceforth we
will prove that the initialization and ApproxMerge procedures introduce an additional
relative error of at most O().
38
Clearly K-step function ge{i} (b) is an -inner approximation of g{i} (b). By 3.4.2, geN (b)
is + 2−K < 2 -inner approximation of gN (b).
4.1.5
Running Time
After replacing pi () by p0i (), the smallest non-zero objective value that is possible is
at least zL /n, while the optimal solution is at most nzL . Thus, we can now restrict
attention in Float(K) to
O
nzL
zL /n
= O(log(n2 /)) = O(log(n/))
different exponents.
The initial computation of ge{i} (b) for all i ∈ N and b ∈ Float(K) ∩ [0, nzL ] takes
O(n · 2K · log(n/)) ≤ O(n/ log(n/)) time.
Thus, the Nonlinear Knapsack Approximation Algorithm runs in
O(n−2 log(n/) + n/ log(n/)) time.
4.2
Multiple Choice Knapsack Problem
The Multiple-Choice Knapsack Problem is as follows:
max
X
p i xi
i∈S
s.t.
X
w i xi ≤ C
i∈S
X
xi = 1 for all j ∈ [1, m]
i∈Sj
xi = 0, 1 for all i ∈ N
where S is the disjoint union of S1 , S2 , · · · , Sm .
The Multiple-Choice Knapsack Problem can be turned into an instance of the Nonlinear Knapsack Problem as follows: for each j ∈ [1, m] define p0j (x0j ) as
max
X
i∈Sj
p i xi :
X
wi xi ≤ x0j ,
X
i∈Sj
i∈Sj
39
xi = 1, xi = 0, 1 .
Then the problem is reformulated as
X
max
p0j (x0j )
j
s.t.
X
x0j ≤ C
j
0
xj ∈
N0 for all j ∈ [1, m]
It now remains to use the result of the previous section. Note that ge{j} (b) can be
initialized quickly because of the specific structure of p0i (x0i ). The function ge{j} (b) is a step
function where discontinuity occurs at ai ’s. Therefore, it takes O(|Sj | log(|Sj |)) time to
prepare a data structure for ge{j} , where the valuation of the function takes O(log(|Sj |))
time.
Thus,
!
X
m
−2
O m log(m/) max |Sj | +
|Sj | log(|Sj |)
j
−2
= O(m
j=1
log(m/)n + n log n)
is the run-time of the algorithm.
4.3
4.3.1
Unbounded Knapsack Problem
The Upper Inverse
We let
X
fS,r (c) = max
p i xi
X
gS,r (b) = min
i∈S
s.t.
X
w i xi ≤ c
s.t.
i∈S
X
w i xi
i∈S
X
pi x i ≥ b
i∈S
X
xi ≤ r
i∈S
xi ≤ r
i∈S
xi ∈ N0 for all i ∈ S
xi ∈ Z, xi ≥ 0 for all i ∈ S
where gS,r (b) is the upper inverse of fS,r (b).
This gS,r () not only satisfies the merging relation in terms of S, but it also satisfies
a form of the merging relation in terms of r, in that
gS,2r (b) = min{gS,r (b0 ) + gS,r (b − b0 ) : b0 ∈ [0, b]}.
Thus, theorem 3.4.1 is applicable when merging two gS,r () into gS,2r ().
40
4.3.2
Profit Threshold
Let’s start by finding half-approximation to the optimal objective value. Suppose item
j have the largest profit density pi /wi . We set zL as the objective value obtained by
picking as many item j as possible: zL = pj bC/wj c. Note that pj (C/wj ) is the optimal
objective value if the integer constraint is removed, and is thus an upper bound on the
optimal objective z ∗ . Therefore, zL ≤ z ∗ ≤ 2zL and zL is a half-approximation to the
optimal objective value.
In order to bound the domain of the functions gS,r , we will separate items into two
sets: the set of cheap items, Scheap := {i ∈ N : pi < zL } and the set of expensive
items Sexpensive := N \Scheap . We compute an approximation of gScheap and an O()-inner
approximation of gSexpensive . Then they can be merged to get a O()-inner approximation
of gN .
4.3.3
Algorithm
Unbounded Knapsack Approximation Algorithm
Step 1: Initial sorting
Find item j with max density: j = argmini {pi /wi }
zL = pj bC/wj c.
Let Scheap := {i ∈ N : pi < zL } and Sexpensive := N \Scheap .
Step 2: Cheap items
Without loss of generality, let Scheap = [1, m].
Find cheap item k ∈ Scheap with max density: k = argmini {pi /wi : i ∈ Scheap }
geScheap (b) = wk bb/pk c
Step 3: Expensive items
r=0
For each b ∈ Float(dlog 1 e) ∩ [zL , 2zL ]
geSexpensive ,1 (b) = min{wi : pi ≤ b}
While 2r < 2
r =r+1
r−1 , g
r−1 , K ,
geSexpensive ,2r =l ApproxMerge
g
e
e
S
,2
S
,2
expensive
expensive
m
where K = − log log 1 − r log 1 − log1 1
geSexpensive = geSexpensive ,2r
Step 4: Final merge
Output max{bc + be : geScheap (bc ) + geSexpensive (be ) ≤ C}.
4.3.4
Correctness
In step 2, the values of geScheap at the multiples of pk are exactly equal to gScheap . Therefore,
the step function geScheap itself can only be off by at most pk < zL : more precisely,
gScheap (b) ≤ geScheap (b) < gScheap (b + zL ).
41
In step 3, geSexpensive ,1 () is dgSexpensive ,1 elog 1 so it is an -inner approximation by lemma
. We claim that resulting geSexpensive () is an 2-inner approximation of gSexpensive (). This
follows since
blog 2/c
+
X
− − log
2
log 1
−r log 1−
1
log 1
r=1
≤+2
log
log 1
blog 2/c
X
log 1−
2
1
log 1
!r
r=1
blog 2/c r
1
1−
log 1
log 2/ !,
1
1
1− 1−
1− 1−
log 1
log 1
1
1
1−
log
e
X
=+
log 1 r=1
≤+
log 1
≤+
log 1
1
≤ 2−
e
Note that ci ≥ zL for expensive
P items and v ranges from zL to 2zL . Therefore, we can
stop the merging when 2r = i∈S xi reaches 2/.
Let ze be the output of the algorithm, then
z ∗ = max{b : gN (b) ≤ C}
= max{u + v : gSc (u) + gSe (v) ≤ C}
≤ max{u + v : geSc (u − zL ) + geSe (d(1 − 2)ve) ≤ C}
1
≤ max{u0 + zL +
v 0 : geSc (u0 ) + geSe (v 0 ) ≤ C}
1 − 2
1
≤ z ∗ + max{u0 +
v 0 : geSc (u0 ) + geSe (v 0 ) ≤ C}
1 − 2
1
≤ z ∗ +
· max{u0 + v 0 : geSc (u0 ) + geSe (v 0 ) ≤ C}
1 − 2
1
· ze
≤ z ∗ +
1 − 2
and (1 − 3)z ∗ ≤ (1 − 2)(1 − )z ∗ ≤ ze. Therefore, the algorithm yields (1 − 3)approximate solution.
42
4.3.5
Running Time
Step 1 and step 2 takes O(n) time to scan through the items to find the minimum
density. Step 3’s ApproxMerge takes
blog 2/c
X
O
− log
4
log 1
−r log 1−
1
log 1
r=1
− log
=O 4
log 1
log2 1
=O 2 blog 2/c
1 X −r log
4
log
r=1
1−
blog 2/c 2r
1 X
log
r=1
1
log
log 1 − 1
1
log
1
log 1
!, !!
2 log 2
2
log 1
log 1
=O
−1
−1
log 1 − 1
log 1 − 1
1
1
3 1
=O 2 log · 1
log 1
1
4 1
=O 2 log
1
3 1
log
2
Therefore, the entire algorithm runs in O n + −2 log4
4.4
4.4.1
1
time.
0-1 Knapsack Problem
The Upper Inverse
The 0-1 Knapsack Problem is as follows:
max
X
p i xi
i∈N
s.t.
X
w i xi ≤ C
i∈N
xi ∈ {0, 1} for all i ∈ N.
We will assume that wi ≤ C for all i. If not, these infeasible items can be thrown
43
out from the problem at the beginning in O(n) time. We let
X
X
fS (c) = max
pi x i
gS (b) = min
wi x i
s.t.
i∈S
i∈S
X
X
w i xi ≤ c
s.t.
i∈S
p i xi ≥ b
i∈S
xi ∈ {0, 1} for all i ∈ S
xi ∈ {0, 1} for all i ∈ S
where gS () is the upper inverse of fS (). This gS () satisfies the merging relation, thus
theorem 3.4.1 and theorem 3.4.2 is applicable to gS ().
4.4.2
Profit Threshold
In 2.2.1, we showed that a half-approximation zL (i.e. zL ≤ z ∗ ≤ 2zL ) can be found in
O(n log n) time using greedy algorithm. In order to limit the domain of the functions
gS , we will separate items into two sets: the set of cheap items, Scheap := {i ∈ N : pi <
zL } and the set of expensive items Sexpensive := N \Scheap . For each i ∈ Sexpensive , we
will replace pi by p0i = bpi cK where 2K−1 ≤ 1/ < 2K . This partitions Sexpensive into
Sexpensive (u) = {i ∈ Se : dpi eK = u}, where each partition is a set of items with same
rounded price c0i . Each expensive item lose at most 1 − of its value. Thus the new
knapsack problem has optimal solution that is at least (1 − )z ∗ .
4.4.3
Algorithm
0-1 Knapsack Approximation Algorithm
Step 1: Initial sorting
Sort the items
P such that
P pi /wi ≥ pi+1 /wi+1 for all i ∈ [1, n − 1].
zL = max{ i≤k+1 pi : i≤k wi ≤ C}/2.
Let Scheap := {i ∈ N : pi < zL } and Sexpensive = N \Scheap .
Step 2: Cheap items
Without loss of generality, let Scheap = [1, m].
For each k ∈P
[1, m]
P
geScheap ( ki=1 pi ) = ki=1 wi
Step 3: Expensive items
Choose K so that 2K−1 ≤ 1/ < 2K .
For each b ∈ Float(K) ∩ [zL , 2zL ]
For each d such that db ≤ 2zP
L
geSexpensive (b) (db) = min{ i∈S ai : |S| = d, S ⊆ Sexpensive (b)}
where Sexpensive (b) = {i ∈ Sexpensive : dpi eK = b}.
geSexpensive = MergeAll({e
gSexpensive (b) : b ∈ Float(K) ∩ [zL , 2zL ]}, K).
Step 4: Final merge
Output max{bc + be : geScheap (bc ) + geSexpensive (be ) ≤ C}.
44
4.4.4
Correctness
P
In step 2, the assigned values geScheap at ki=1 pi are exactly equal to gScheap . Therefore,
the step function geScheap itself can only be off by at most the price of one cheap item:
more precisely, gScheap (b) ≤ geScheap (b) < gScheap (b + zL ).
In step 3, geSexpensive (b) () is an -inner approximation of gSexpensive (b) for each b. Thus the
resulting geSexpensive () is an + 2−C < 2 - inner approximation of gSexpensive () by theorem
3.4.2.
The rest follows from identical calculation as in the correctness analysis of the unbounded knapsack approximation algorithm.
4.4.5
Running Time
Step 1 takes O(n log n) time to sort the items by their density. Step 2 takes O(n)
to scan through the already sorted cheap items. Initialzing the -inner approximation
functions in step 3 takes negligible time, since the profit is fixed for each set and greedy
works. Step 3’s MergeAll takes O(2K · 1 · 4K log 1 ) = O(−3 log 1 ) time. Thus the whole
algorithm takes O(n log n + −3 log 1 ) time. Lawler’s technique can be used to change
the first term to O(n log 1 ).
4.5
4.5.1
Integer Knapsack Problem
The Upper Inverse
The Integer Knapsack Problem is as follows:
X
max
p i xi
i∈N
s.t.
X
w i xi ≤ C
i∈N
0 ≤ xi ≤ li , xi ∈ Z for all i ∈ N.
We let
fS (c) = max
X
gS (b) = min
X
i∈S
i∈S
X
s.t.
X
s.t.
p i xi
wi xi ≤ c
i∈S
wi xi
p i xi ≥ b
i∈S
0 ≤ xi ≤ li , xi ∈ Z for all i ∈ S
0 ≤ xi ≤ li , xi ∈ Z for all i ∈ S
where gS () is the upper inverse of fS (). This gS () satisfies the merging relation, thus
theorem 3.4.1 and theorem 3.4.2 is applicable to gS ().
45
4.5.2
Profit Threshold
We can use the greedy algorithm as in the 0-1 knapsack to find the half optimal objective
value zL ≤ z ∗ ≤ 2zL . The only difference is that each items can be chosen multiple times.
We again separate items into two sets: the set of cheap items, Scheap := {i ∈ N :
pi < zL } and the set of expensive items Sexpensive := N \Scheap . For each i ∈ Sexpensive ,
we will replace pi by p0i = bpi cK where 2K−1 ≤ 1/ < 2K . This partitions Sexpensive into
Sexpensive (y) = {i ∈ Sexpensive : dpi eK = y}, where each partition is a set of items with
same rounded profit p0i . Each expensive item lose at most 1 − of its value. Thus the
new knapsack problem has optimal solution that is at least (1 − )z ∗ .
Same as before, we compute an approximation of gScheap and an O()-inner approximation of gSexpensive . Then they can be merged to get a O()-inner approximation of
gN .
4.5.3
Algorithm
Integer Knapsack Approximation Algorithm
Step 1: Initial sorting
Sort the items
P such that pi /wi ≥ pi+1
P/wi+1 for all i ∈ [1, n − 1].
zL = max{ i≤k li pi + (l + 1)pk+1 : i≤k li wi + lwk+1 ≤ C, 0 ≤ l ≤ lk+1 }/2.
Let Scheap := {i ∈ N : pi < zL } and Sexpensive = N \Scheap .
Step 2: Cheap items
Without loss of generality, let Scheap = [1, m].
For each k ∈ [1, m]
For each 1 ≤P
l ≤ lk
Pk−1
geScheap ( k−1
i=1 li wi + lwk
i=1 li pi + lpk ) =
Step 3: Expensive items
Choose K so that 2K−1 ≤ 1/ < 2K .
For each b ∈ Float(K) ∩ [zL , 2zL ]
For each d such that dbP≤ 2zL
P
geSe (u) (db) = min{ i∈Se (b) di ai : i∈Se (b) di = d, di ≤ li }
where Se (b) = {i ∈ Sexpensive : dci eK = b}.
geSexpensive = MergeAll({e
gSe (b) : b ∈ Float(K) ∩ [zL , 2zL ]}, K).
Step 4: Final Merge
Output max{bc + be : geScheap (bc ) + geSexpensive (be ) ≤ C}.
4.5.4
Correctness
In step 2, the assigned values geScheap are exactly equal to gScheap . Therefore, the step
function geScheap itself can only be off by at most the profit of one cheap item: more
precisely, gScheap (b) ≤ geScheap (b) < gScheap (b + zL ).
46
In step 3, geSe (b) () is an -inner approximation of gSe (b) for each b. Thus the resulting
geSexpensive () is an + 2−K < 2 - inner approximation of gSexpensive () by theorem 3.4.2.
The rest follows from identical calculation as in the correctness analysis of the unbounded knapsack approximation algorithm.
4.5.5
Running Time
Step 1 takes O(n log n) time to sort the items by their density. Step 2 takes O(n)
to scan through the already sorted cheap items. Initialzing the -inner approximation
functions in step 3 takes negligible time, since the profit is fixed for each set and greedy
works. Step 3’s MergeAll takes O(2K · 1 · 4K log 1 ) = O(−3 log 1 ) time. Thus the whole
algorithm takes O(n log n + −3 log 1 ) time.
47
Chapter 5
Randomized Algorithm
In this chapter, we show how the 0-1 Knapsack Algorithm can be modified into a randomized algorithm that has faster run-time: O(n log n + −5/2 log3 1 ).
5.1
e −5/2)
Achieving O(
The idea is to merge sets of items with similar prices cleverly so that ApproxMergeAll
does less work. We will initially compute geS where S is a set of items with price ranging
from b to b + 2K/2 . Then ApproxMergeAll has O(2K/2 ) = O(−1/2 ) less sets to work with
and thus takes O(−5/2 log 1 ) time instead of O(−3 log 1 ). If such geS can be computed
e −5/2 ) time then we can achieve the O(
e −5/2 ) term.
in O(
Before we continue, lets establish some notation. We can safely suppose that K is
even (if not, just halve the epsilon). Let R = 2K/2 . Since 2K is roughly 1/, R is roughly
equal to −1/2 (this is important to remember, as R will become a sort of standard unit
of measurement). Define
T (uR · 2m ) =
R−1
[
Sexpensive ((uR + k) · 2m ),
k=0
where R/2 ≤ u < R. T (v) is an union of Se (·)s with R consecutive mantissa. Note
that for any profit pi ∈ Float(K), there exists u and m such that pi = uR + k · 2m for
some 0 ≤ k < R. So all expensive items are partitioned into T (b)’s. Recall that the
set of expensive profits is Float(K) ∩ [zL , 2zL ]. Thus the set of expensive items are
partitioned into O(−1/2 log 1 ) = O(R log R) of T (b)s. So if we can compute an -inner
approximation of geT (b) for each b in O(−2 log2 1 ) = O(R4 log2 R), we achieve the desired
run-time.
49
Example 5.1.1. Suppose = 0.1. Clearly, 23 ≤ < 24 so K is 4 and R is 2K/2 = 4.
Suppose zL is 100. Then the set of expensive profits is
Float(K) ∩ [zL , 2zL ] =
∪
∪
∪
∪
{10, 11, 12, 13, 14, 15}
{16, 18, 20, 22, 24, 26, 28, 30}
{32, 36, 40, 44, 48, 52, 56, 60}
{64, 72, 80, 88, 96, 104, 112, 120}
{128, 144, 160, 176, 192}.
In the non-randomized FPTAS, gS () was initialized for S = Sexpensive (b) for each b in
this set. Then ApproxMergeAll merged these 35 functions into one.
In the FPRAS, we partition the expensive profits into these sets:
T (8) = Sexpensive (10) ∪ Sexpensive (11),
T (12) = Sexpensive (12) ∪ Sexpensive (13) ∪ Sexpensive (14) ∪ Sexpensive (15),
T (16) = Sexpensive (16) ∪ Sexpensive (18) ∪ Sexpensive (20) ∪ Sexpensive (22),
T (24) = Sexpensive (24) ∪ Sexpensive (26) ∪ Sexpensive (28) ∪ Sexpensive (30),
T (32) = Sexpensive (32) ∪ Sexpensive (36) ∪ Sexpensive (40) ∪ Sexpensive (44),
T (48) = Sexpensive (48) ∪ Sexpensive (52) ∪ Sexpensive (56) ∪ Sexpensive (60),
T (64) = Sexpensive (64) ∪ Sexpensive (72) ∪ Sexpensive (80) ∪ Sexpensive (88),
T (96) = Sexpensive (96) ∪ Sexpensive (104) ∪ Sexpensive (112) ∪ Sexpensive (120),
T (128) = Sexpensive (128) ∪ Sexpensive (144) ∪ Sexpensive (160) ∪ Sexpensive (176),
T (192) = Sexpensive (192),
and gS () will be initialized for S = T (b). Then ApproxMergeAll merges these 10
functions into one.
Say p = uR · 2m . We have
X
gT (p) (b) = min
w i xi
i∈T (p)
s.t.
X
p i xi ≥ b
i∈T (p)
xi ∈ {0, 1} for all i ∈ T (p).
In order to compute gT (p) (b), we will introduce a new constraint that counts the
50
number of items. Consider the following function:
X
hlT (p) (b) = min
w i xi
i∈T (p)
X
s.t.
p i xi ≥ b
i∈T (p)
xi ∈ {0, 1} for all i ∈ T (p)
X
xi = l.
i∈T (p)
The range for l is [0, 2/] ⊆ [0, 2R2 ].
We have gT (p) (b) = minl hlT (p) (b) so we will compute the inner approximation of
minl hlT (p) (b) instead of gT (p) (b). The time given is O(−2 log2 1 ) for a fixed p. We will
break this down into two cases: one where l ≤ R and the other where l > R.
5.2
Small Number of Items
Our goal in this section is to compute minl≤R hlT (p) (b) within O(−2 log2 1 ) time.
First, observe that we can take out some common components out from the profits.
X
h̄lT (p) (b0 ) = min
w i xi
i∈T (p)
s.t.
X
p0i xi ≥ b0
i∈T (p)
xi ∈ {0, 1} for all i ∈ T (p)
X
xi = l.
i∈T (p)
where p0i = (pi − p)/2m . Because p ≤ pi < p + R · 2m , p0i lies in the interval [0, R).
We use dynamic programming to compute minl≤R h̄lSk (b0 ) where
Sk =
k−1
[
Sexpensive (p + i · 2m ),
i=0
iterating from k = 1 to R. At each k, we keep track of three arrays indexed by b0 .
Gk [b0 ] denotes minl≤R h̄lSk (b0 ). Lk [b0 ] denotes the number of items in the solution to the
minimization problem of Gk [b0 ]. Zk [b0 ] denotes the last item added to the solution of
Gk [b0 ], i.e. the heaviest item among the most costly item in the solution set.
Initializing the arrays for k = 1 is simple since all profits are equal in the set S1 =
Sexpensive (p) and the greedy is optimal. Suppose we are now iterating over k + 1, given
51
that the arrays were calculated for k. Let q items in Sexpensive (p + k · 2m ) has weights
w10 ≤ w20 ≤ · · · ≤ wq0 . Then we compute Gk+1 [b0 ] as
( i
!
)
X
min
wj0 + Gk [b0 − ki] : 0 ≤ i, i + Lk [b0 − ki] ≤ R .
j=1
0
Then Lk+1 [b ] is simply i + Lk [b0 − ki] and Zk+1 [b0 ] is the ith lightest item in the set
Sexpensive (p + k · 2m ).
Each iteration on k takes O(−3/2 ) time, as there are at most R × (R · R) pairs
P
of ij=1 a0j and Gk [b0 − ki]’s to consider. There are R iterations. Therefore, the total
run-time for one T (p) is O(−2 ).
5.3
Large Number of Items
Our goal in this section is to compute an inner approximation of minl>R hlT (p) (b) within
O(−2 log2 1 ) time.
Consider the following LP relaxation of hlT :
X
φlT (p) (b) = min
w i xi
i∈T
s.t.
X
p i xi ≥ b
i∈T (p)
0 ≤ xi ≤ 1 for all i ∈ T (p)
X
xi = l.
i∈T (p)
2
The argument l can
each l, the
P range from R to 2R as mentioned before. For
possible values of b = i∈T (p) pi xi falls into the interval of [pl, (p + R · 2m ) · l]. We will
only consider b ∈ Float(K) for inner approximation. Thus there are O(−3/2 ) pairs of
(b, l) for which we hope to compute φlT (p) (b).
We show that φlT (p) (b0 ) yields O()-inner approximation of hlT (p) (b) for solutions with
number of items at least R. Since φlT (p) (b) is a linear program, the optimal objective
value is achieved at a basic feasible solution. Then this solution has at least |T | active
constraints, and thus xi is 0 or 1 for at least |T −2| i’s. Suppose without loss of generality
that item 1 and 2 are the only items with possible fractional solution xi . All other xi ’s
sum to an integer, so x1 + x2 is also an integer. If it is 0, then the solution is also feasible
in the formulation of hlT (p) (b) and hlT (p) (b) = φlT (p) (b). Otherwise, x1 + x2 = 1. Without
loss of generality, let a1 ≤ a2 . Then we can construct a solution for hlT (p) (b) by letting
x01 = 1, x02 = 0, and x0i = xi for all other i’s. The profit difference of the first two items
is at most R, and b is at least pR ≥ R3 . Therefore, the optimal value of φlT (p) (b) we
computed is -inner approximation of gTl (p) (b).
52
5.4
5.4.1
Properties of ψT (p)(b, λ)
Lagrangian Relaxation
All it remains to show is that φlT (p) (b) can be computed in O(−1/2 log2 1 ) time.
Consider the Lagrangian relaxation of the equality constraint.
P
X
X
i∈T (p) pi xi ≥ b
φlT (p) (b) = max min
w i xi + λ
xi − l :
λ
0 ≤ xi ≤ 1 for all i ∈ T (p)
i∈T (p)
i∈T (p)
The objective value can be rewritten as
ψT (p) (b, λ) := min
X
P
i∈T (p) (wi
+ λ)xi − lλ. Thus we let
P
(wi + λ)xi :
i∈T (p)
pi x i ≥ b
,
0 ≤ xi ≤ 1 for all i ∈ T (p)
i∈T (p)
and then φlT (p) (b) = maxλ ψT (p) (b, λ) − lλ . Note that ψ does not involve l term.
Before we proceed to the final step of the randomized algorithm, lets familiarize
ourselves with these functions.
5.4.2
Simple Observations
For a fixed value of λ, the function ψT (p) (b, λ) can be computed by greedy algorithm by
. The resulting optimal solution x∗ will have a bunch of 1s,
sorting the items by wip+λ
i
one or no fractional value, and 0 for the rest of x∗i ’s. As long as the sorting does not
change, the optimal solution x∗ does not change either. Thus ψT (p) (b, λ) is a piecewise
linear function in λ. For each linear component, the slope of the function is given by
P
∗
i∈T (p) xi .
If λ = −∞, the sorting selects the items with smaller profits first, and then breaks
tie with item with smaller weight. As we vary λ from −∞ to ∞, swaps will occur in
the sorting, eventually ending up with the following sorting: the sorting favors the items
with bigger profits first, and then break tie with items with smaller weight. These swaps
w +λ
w p −w p
occur when two densities become equal, i.e. wip+λ
= jpj ⇒ λ = i pji −pjj i . We will call
i
these λ’s breakpoints.
All breakpoints will cause swaps in the order, butPit may not change the optimal x∗ .
We say that a breakpoint that changes optimal (i.e. i∈T (p) x∗i is different for all λL < λ
L
and λU > λ) is excellent. We say that a breakpoint λ is great if the sorting by wi +λ
pi
U
and wi +λ
differs in the first 2R2 items for all λL < λ and λU > λ. A excellent breakpoint
pi
w p −w p
is great, but not necessarily the other way. Lastly, if pi < pj and λ = i pji −pjj i then
we say that breakpoint λ is associated with item i. Such breakpoint will swap i with
an item that comes after i. The first 2R2 smallest breakpoints associated with item i is
53
called good. A great breakpoint must be good. This is because if there are 2R2 smaller
breakpoints associated with i before it, then the ordering will prefer those items ahead
of i and the swap will occur between i and an item that comes after i. Putting it all
together, the inclusion is as follows:
Excellent
breakpoints
⊆
Great
breakpoints
⊆
Good
breakpoints
⊆
All
breakpoints
.
Clearly. ψT (p) (b, λ) is an increasing concave function of λ. Thus computing φlT (p) (b)
boils down to finding λ where ψT (p) (b, λ) transitions from a linear function of slope at
least l to a linear function of slope less than l.
5.4.3
An Example of ψT (p) (b, λ)
We will take a look at a very concrete example of ψT (p) (b, λ) now. There are a lot of
moving parts and we will be doing very tricky stuff with the function, so it will be
beneficial to ground ourselves firmly here.
Example 5.4.1. Suppose that = 0.1, K = 4 and R = 4 as in the previous example.
We pick
T (32) = Sexpensive (32) ∪ Sexpensive (36) ∪ Sexpensive (40) ∪ Sexpensive (44),
for our example. The items in this set are:
Weights
Weights
Weights
Weights
of
of
of
of
items
items
items
items
with
with
with
with
profit
profit
profit
profit
32:
36:
40:
44:
1000, 1300, 1600
−
1200
1300, 1900
We will label each item from 1 to 6, in the order listed above.
The budget b is 120. Then the function ψT (p) (b, λ) is as follows:
λ
< −3200
< −2400
< −1300
< 300
< 1400
< 5800
≥ 5800
{i : x∗i = 1}
1, 2, 3
1, 2, 4
1, 2, 4
1, 4, 5
1, 4, 5
4, 5
5, 6
{i : 0 < x∗i < 1}
4
3
5
2
6
6
4
ψT (p) (b, λ)
1000 + 1300 + 1600 + 1200 × 24
40 + λ(3 +
1000 + 1300 + 1200 + 1600 × 16
32 + λ(3 +
1000 + 1300 + 1200 + 1300 × 16
44 + λ(3 +
4
1000 + 1200 + 1300 + 1300 × 32
+ λ(3 +
4
1000 + 1200 + 1300 + 1900 × 44 + λ(3 +
36
1200 + 1300 + 1900 × 44
+ λ(2 + 36
44 )
32
1300 + 1900 + 1200 × 40 + λ(2 + 32
40 )
54
24
40 )
16
32 )
16
44 )
4
32 )
4
44 )
20000
15000
10000
ψT (p) (b, λ)
5000
0
-5000
-10000
-4000
-2000
0
2000
4000
6000
λ
In this example, we observe everything we discussed in the previous section: The
optimal solution x∗ have a form of having bunch of 1s, one or no fractional value, and
∗
0 for the rest
Pof xi ’s.∗ We see that in each linear component, the slope of the function
is given by i∈T (p) xi . At λ = −∞, the sorting started with the order 1, 2, 3, 4, 5, 6,
selecting the small profit items first. As we increase λ, we ended with the sorting of
5, 6, 4, 1, 2, 3, picking the large profit items first. From the decreasing slope, we can
confirm that this is indeed an increasing concave function in λ.
If we would like to compute φ3T (32) (120), we simply find a point where the slope
changes from a value at least 3 to a value less than 3. In this case, such λ is at 1400,
yielding value of ψT (32) (120, 1400) = 8000. Thus φ3T (32) (120) = ψT (32) (120, 1400)−1400×
3 = 3800.
5.4.4
Evaluation of ψT (p) (b, λ) Using Median Find
For a fixed value of λ, the function ψT (p) (b, λ) can be computed by greedy algorithm by
sorting the items by wip+λ
. This can be sped up to O(R log2 R) by the following method:
i
we look for smallest threshold t such that if we let xi = 1 for all i that satisfies wip+λ
≤t
i
P
and xi = 0 for the rest then i∈T (p) pi xi ≥ b. At each iteration of the search for such t,
each set Sexpensive (p + k · 2m ) keeps track of low and high, which is initialized to 0 and
2R2 , respectively. Recall that each set is already sorted by wi (if we used Lawler’s speed
up, we can still sort it now and not incur additional time) and consequently also sorted
by wip+λ
. For each set, Take the average of low and high, round to an integer, called
i
mid, and evaluate
of
wimid +λ
pimid
wimid +λ
.
pimid
We make a guess for the threshold t as the weighted median
over all the sets Sexpensive (p + i · 2m ), weighted by (high − low).
55
The threshold t can be binary searched over each Sexpensive (p + k · 2m ) to find the
+λ
index i where wip+λ
≤ t < wi+1
. Summing all the costs of items (which can be done
pi+1
i
in O(R) time, as there are R Sexpensive (p + k · 2m )’s) that are below the threshold tells
us whether the guess is too big or too small. The search range for each bin can then be
updated accordingly by replacing low or high by i. Since we took the weighted median,
at least quarter of the items are discarded from the search ranges. Thus, the search for
the threshold terminates in at most O(log(R · 2R2 )) = O(log R) steps. Each iteration
takes at most R log R time where the binary search for i in each set is the bottleneck.
Therefore, the whole search takes O(R log2 R) time.
Theorem 5.4.2. The function ψT (p) (b, λ) can be computed at a given b and λ in
O(R log2 R) time.
Once computed,
we can also get the left and right slope of the function at λ, simply
P
∗
by taking i∈T (p) xi .
We can also use the same technique to filter out all but good breakpoints. We are only
interested in excellent breakpoints, but it is not possible to identify which breakpoints
would be excellent beforehand. However, we can identify the good breakpoints, which
narrows down the candidates for excellent breakpoints.
w p −w p
Let i be an item. A breakpoint λ = i pji −pjj i is associated with i if pi < pj , so j
is in Sexpensive (p + k · 2m ) where pi < p + k · 2m . We keep track of low and high as
before for these sets. This time, we are binary searching for a threshold t such that the
number of items below threshold is exactly 2R2 . Everything else is identical, including
the run-time.
Theorem 5.4.3. Given an item i, all good breakpoints associated with item i can be
identified in O(R log2 R) time.
The last procedure we will discuss is what we willcall local sorting.
Suppose we are
l
looking for the optimal solution for φT (p) (b) = maxλ ψT (p) (b, λ) − lλ and we were able
to narrow it down to be in between two close-by points λL and λU . Suppose that there
are less than kR good breakpoints in the interval for some constant k. Since only kR
swaps can occur between the two endpoints, the ordering of items at the two endpoints
do not differ in the first few items except for the last kR items or less. We can just use
the all but the last kR items in the optimal solution and just sort the ≤ 2kR items that
appear in the solution at λL or λU as the last kR items. This takes O(R log R) time to
find the optimal solution.
56
5.5
Randomized Algorithm
We are finally ready to delve into the randomized part of the algorithm. The situation
is as follows: there are R different profits in T (p), each with at most 2R2 items. If we
can examine all breakpoints generated by pairs of items in T (p), then we can compute
φlT (p) (b). However, there are at most R2 · (2R2 )2 = O(R6 ) breakpoints in total, and
computing ψT (p) (b, λ) for each breakpoint λ takes O(R) time. This is too slow.
We can do slightly better: use the filtering from Theorem 5.4.3 to look at only good
breakpoints. For each item, this brings down the number of associated breakpoints to
2R2 instead of 2R3 , so the total number of breakpoints we have to look at is O(R5 ).
This is still too slow.
It seems wasteful to try to look at every good breakpoints. We can tell whether the
breakpoint we tested is bigger or smaller than the optimal breakpoint. We would want
to use binary search, but we don’t have the access to the ordering of breakpoint without
generating them all.
Since we can’t look at every good breakpoints, let’s sample some random breakpoints
and then binary search on those sampled to get close to the desired breakpoint. If we
can narrow it down to an interval containing a small number of breakpoints, then we
can use the local sorting to get to the optimal in reasonable time.
Out of O(R5 ) breakpoints, we will uniformly sample O(R4 log R) breakpoints, with
repetition. The chances are that we will pick breakpoints that are within O(R) the
optimal breakpoint.
For all item i:
Use Theorem 5.4.3 to find good breakpoints associated with item i.
Let goodi be the number of such breakpoints.
Let randomi = 0 be the number of samples associated with item i.
For r from 1 to R4 log R
Randomly choose an item i, weighted by goodi .
randomi = randomi + 1
Let sampleList be an empty list
For all item i:
For r from 1 to randomi
Uniform randomly choose a good breakpoint associated with item i
and append it to sampleList
Sort sampleList
For all pair (b, l):
Binary search by evaluating ψT (p) (b, λ) on sampleList and then see whether
the slope at the breakpoint is greater or less than l.
Use the local sorting to find the optimal solution φlT (p) (b),
assuming that there are only 8R good breakpoints in between.
57
The last step can fail if the assumption is wrong, which results in an incorrect solution
for the entire algorithm. It remains to check that 1) this randomized procedure runs in
our time budget 2) the probability of failure over the entire FPRAS algorithm is small.
The bottleneck is when we sort the sampled good breakpoints. There are R4 log R
samples, so the sorting takes O(R4 log R · log(R4 log R)) = O(R4 log2 R) time. The
binary searches take O(R3 · R log2 R · log(R4 log R)) = O(R4 log3 R) time, but if we keep
the computation result for the low depth searches that commonly occur between pairs
of (b, l), then this can be reduced to be O(R4 log2 R). Lastly, the local sortings take
O(R3 · R log R). Therefore, it takes O(R4 log2 R) time to compute φlT (p) (b) for all pairs
of (b, l).
There are at most R · 2R2 · 2R2 = 4R5 good breakpoints. Suppose that these were
ordered and then cut into R4 sets of 4R consecutive good breakpoints. We sampled
R4 log R good breakpoints uniformly. We would like to claim that with high probability
at least one good breakpoint was sampled from each set. If each 4R consecutive set of
good breakpoints contain at least one sample, then it is not possible to have two samples
that are more than 8R good breakpoints apart.
This is a coupon collector problem [1]. The probability of missing one particular set
is
6R4 log R
1
≤ (1/e)6 log R = 1/R6
1− 4
R
Then the probability of missing any set is at most R4 · 1/R6 = 1/R2 . Over the entire
FPRAS, there are at most 4R log R T (p)’s to consider. Thus the probability of success
for every T (p) is:
4R log R 4R2
1
1
1− 2
≥ 1− 2
≥ 1/256.
R
R
This can be boosted to a bigger constant by repeating the entire algorithm a few times.
58
Chapter 6
Conclusion
There are many remaining studies that should be done.
1. The biggest one is the analysis of space complexity. We did not optimize our space
complexity at all for retrieval of the optimal solution from the optimal objective
value. This optimization will involve cleverly storing backtracking information so
that as little data as possible is stored without impacting the retrieval run-time.
We believe that there is nothing that prevents Kellerer and Pferschy’s work from
being applied to our setup, and have the same space complexity of O(n + −2 ) for
the 0-1 Knapsack Problem, but this remains to be checked.
2. Our method may also apply to the problem of subset sum. We have explored an
idea using fast Fourier transform, but this work remains unfinished.
3. Lastly, the function ψT (p) (b, λ) needs more examination. This function has a very
interesting combinatorial structure and may hold other ways to speed up the 0-1
knapsack algorithm. The most obvious goal is to derandomize the FPRAS and to
e log n + −2.5 ) with a FPTAS.
obtain the running time of O(n
59
Bibliography
[1] P Erdős. On a classical problem of probability theory. Magyar Tudományos
Akadémia Matematikai Kutató Intézetének Közleményei, 6:215–220, 1961.
[2] Oscar H Ibarra and Chul E Kim. Fast approximation algorithms for the knapsack
and sum of subset problems. Journal of the ACM (JACM), 22(4):463–468, 1975.
[3] Hans Kellerer and Ulrich Pferschy. A new fully polynomial time approximation
scheme for the knapsack problem. Journal of Combinatorial Optimization, 3(1):59–
71, 1999.
[4] Katherine Lai. The knapsack problem and fully polynomial time approximation
schemes. for 18.434, 2006.
[5] Eugene L Lawler.
Fast approximation algorithms for knapsack problems.
Mathematics of Operations Research, 4(4):339–356, 1979.
[6] MJ Magazine and Osman Oguz. A fully polynomial approximation algorithm for the
0–1 knapsack problem. European Journal of Operational Research, 8(3):270–273,
1981.
[7] MJ Magazine and Osman Oguz. A heuristic algorithm for the multidimensional
zero-one knapsack problem. European Journal of Operational Research, 16(3):319–
326, 1984.
[8] Silvano Martello and Paolo Toth. Knapsack Problems: Algorithms and Computer
Implementations. John Wiley & Sons, 1990.
[9] G. B. Mathews. On the partition of numbers.
Mathematical Society, 28:486–490, 1897.
Proceedings of the London
[10] Ralph Merkle and Martin Hellman. Hiding information and signatures in trapdoor
knapsacks. Information Theory, IEEE Transactions on, 24(5):525–530, 1978.
[11] H Shachnai and T Tamir. Polynomial time approximation schemesa survey.
Handbook of Approximation Algorithms and Metaheuristics, Chapman & Hall,
Boca Raton, 2007.
61
[12] Steven S. Skiena. Who is interested in algorithms and why?: Lessons from the
stony brook algorithms repository. SIGACT News, 30(3):65–74, September 1999.
62