1980 by o0~ of
advertisement

CIRCULARVECTION AND OCULAR COUNTERROLLING IN VISUALLY INDUCED RILL
- SUPINE AND IN WEIGHTLESSNESS
BY
TROY A. CRITES
S.B.
Aeronautical and Astronautical Engineering, M.I.T.
(1979)
Subitted in partial fulfillnent of the
requiremrents for the degree of
MASTER OF SCIENCE
at the
MASSACHUSETIS INSTI'IUTE OF TECHNOLOGY
June, 1980
Massachusetts Institute of Technology, 1980
Signature of Author
De~r~t of
B;igy. eer
01
o0~
cal & Astronautical
C6Y
51980
Certified by
DrW- J.aurence/
. Yafig, Thesis Supervisor
Accepted by
Chairman, Department Cormmittee
Room 14-0551
77 Massachusetts Avenue
Libraries
M
Document Services
Cambridge, MA 02139
Ph: 617.253.2800
Email: docs@mit.edu
http://libraries.mit.edu/docs
DISCLAIM ER
MISSING PAGE(S)
Missing pg. 30 / text deletion on pg.196
2
CIRCULARVECTION AND OCULAR COUNTERROLLING
IN VISUALLY INDUCED ROLL -
SUPINE AND IN WEIGHTLESSNESS
by
TROY A. CRITES
Submitted to the Department of Aeronautics and Astronautics on May 9,
1980 in partial fulfillment of the requirements for the degree of
Master of Science.
ABSTRACT
The perception of self motion about the visual axis and the
associated ocular counterrolling (OCR) were investigated and documented
in several environments. A full visual field of random dots was used
to create visually induced roll in a supine position on earth and during
zero g parabolic flights. The role of tactile forces as a replacement
for otolith cues in limiting sensations of circularvection (CV) was also
investigated.
Onset times for CV were shown to be dependent upon visual pattern
and to be similar to those found by previous authors in yaw vection.
The associated changes were as predicted with the addition of tactile
cues increasing onset times and the removal of g forces decreasing them.
Vection velocities were unaffected by either tactile cues or the absence of gravity.
Ocular counterrolling and circularvection were 'shown to have no
correlation and appeared to be controlled by independent processes.
Binocular vision was shown to produce significantly greater amounts of
ocular counterrolling than monocular viewing. In addition, Hering's
Law of Equal Innervation was borne out for torsional eye movements by
the binocular measurements.
Thesis Supervisor:
Laurence R. Young
Title:
Professor of Aeronautics and
Astronautics
2a
ACKNOWLEDGEMENTS
The list of people I feel a need to thank for help, both moral
Every
and physical, in completion of this thesis seems almost endless.
individual effort cannot be mentioned,
but I would like to whole-
heartedly thank everyone responsible, and in particular:
Thanks to my thesis advisor,
Professor Larry Young,
for the
knowledgeable albeit infrequent assistance in my endeavors, both in
this thesis and the rest of my curricula and activities.
The person to whom I owe the most,
Arrott.
however,
is G.S.
Anthony
If it were not for his work for a year prior to my arrival
Over
here on this project, I would never have completed this project.
and again, he gave unselfishly of his time, his knowledge, his insight,
and perhaps most of all, his programs.
Again, I owe him more than I
can ever hope to repay.
Bob Renshaw deserves a big thanks for his time and commitment
to my thesis.
He is responsible for having made all
the apparatus
work and for being sure I did everything in the right order.
weren't for his contagious smile and good humor,
If it
facing a project such
as this would have been unbearable.
Sherry Modestino and smiling Patricia Rich gave willingly of
their time,
patience and fingertips in preparing this document,
I am deeply indebted to them for it.
and
2b
I would like to thank the rest of the Man Vehicle Lab, especially
Dr. Oman and Dr. Kenyon for much needed advice and assistance to fill
in for my lack of knowledge in physiology.
Al Shaw deserves a note of
thanks for his time and patience, without him, no student could successfully weave his way through the tangled web of laboratories and shops
to find the proper equipment at the proper time - immediately.
I would like to thank those who made the data acquisition onboard the KC-135 possible, Larry Young, Chuck Oman, Bob Renshaw, Mil
Reschke, Joe Baker, Don Griggs and Larry Majors and a host of others.
And to those who subjected themselves to this madness willingly and
otherwise, the Spacelab astronauts and the 6 other volunteers, thanks.
Stefania Rubinsky is responsible for the majority of time
spent on the Hermes Analyzer reducing the OCR data and deserves a note
of thanks for her patience and ability at such a tedious task.
Finally, and by no means last on my list of people to thank, I
would like to express my gratitude to Kathy Cornelius for her literary
talents, warmheartedness, patience and understanding of the work involved in such an undertaking.
She made it all worthwhile .
This research was supported by NASA Contract NAS9-15343 and the
author was funded by the M.I.T. Basic Sloan Fund.
3
TABLE OF CONTENTS
Page
CHAPTER 1
INTRODUCTION
CHAPTER 2
BACKGROUND
CHAPTER 3
CHAPTER 4
CHAPTER 5
7
10
2.1
Ocular Counterrolling
10
2.2
Circularvection
13
2.3
Motivation
18
METHODS
32
3.1
Visual Pattern
32
3.2
OCR Data Collection
36
3.3
OCR Analysis
43
3.4
Vection
49
3.5
Vection Analysis
51
3.6
KC-135 Methods
51
3.7
KC-135 Data Analysis
55
3.8
Subjects
56
3.9
Drugs
58
REPEATIBILITY AND ACCURACY
59
4.1
450 vs 900 Signals
59
4.2
Monocular vs Binocular Vision in OCR
62
4.3
Varying Patterns, Lighting & Depth
of Dome
64
4.4
Changes in Scanners
73
4.5
Dilation of the Eyes in OCR Measurements
81
RESULTS
5.1 Vection Results
87
88
4
5.2
CHAPTER 6
OCR Results
102
5.2.1
Monocular
102
5.2.2
KC-135
106
5.2.3
Binocular
107
CONCLUSIONS
6.1
Recommendations
ill
115
APPENDIX A
BINOCIN
116
APPENDIX B
SCANOR3
119
APPENDIX C
SCHEMATIC OF DOME CIRCUITRY
124
APPENDIX D
OCR PLOTS
129
REFERENCES
D-1
Monocular 1-g
129
D-2
Monocular Zero g
143
D-3
Binocular 1-g
156
193
5
LIST OF FIGURES
& TABLES
Page
TABLE 1
Incidence of Reported Space Sickness
21
FIGURE 1
Vestibular System and the Inner Ear
24
FIGURE 2
Semicircular Canal Model and Plotted Response
25
FIGURE 3
Miller Model of Otolith Mediated OCR Response
& Young Meiry Model of Otolith Response
27
Photograph of Dome Pattern and Apparatus
used on KC-135 Flights
33
Photograph of Present Dome Pattern &
Dimensioned Dome
34
FIGURE 6
Several Views of Apparatus as set up in Lab.
37
FIGURE 7
Photograph of Nikon Camera used for OCR
39
FIGURE 8
Photograph of Mouthpiece and Fiduciary
41
SKETCH
Two Point Fiduciary with Definitions
45
SKETCH
Single Bar Fiduciary with KC-135 Definitions
55
TABLE 2
Average & Standard Deviation of Velocity
in 45* vs 90* Measures
61
TABLE 3
Pattern and Viewing Differences Compared
67
FIGURE 9
Brown Eyed Subject with Reflected Dot Pattern
70
FIGURE 10
Hazel Eyes under Identical Lighting as Fig. 9
71
FIGURE 11
Same Conditions as Fig. 10, Different Dilation
72
FIGURE 12
Scanner Comparison Plotted on Smae Graph
74
FIGURE 13
Increased Scale Overlay, Yao Right over
Stefania Right
75
Increased Scale Overlay, Yao Left over
Stefania Left
77
Binocular Comparison, Yao Right over
Stefania Left
79
FIGURE 4
FIGURE 5
FIGURE 14
FIGURE 15
6
Page
FIGURE 16
80 Point Dilation Study- Small Pupil Overlay
84
FIGURE 17
Comparison of Onset Times for 2 Patterns
89
FIGURE 18
Onset of CV in 4 Conditions - 1 g, 1 g Tactile,
2 g and Zero g
91
Perceived vs Actual Dome Speed in 3 Conditions 1 g, 1 g Tactile, and Zero g
95
Average Time of Vection in 2 Conditions 1 g and 1 g Tactile
97
Compiled Averages and Standard Deviations as
Plotted in Figures 17 through 20
98
FIGURE 19
FIGURE 20
TABLE 4
TABLE 5
Individual Averages of Crew Members for Time of Onset, Subjective Velocity, & Drop Outs
101
7
CHAPTER 1
INTRODUCTION
Circularvection,
or the perception of self motion when viewing a
fully rotating visual field, is a phenomenon that was studied as early
as 1896 by Helmholtz.
Functional concern about the problem, however,
did not arise again until the 1960's and more so the early '70's.
'Circularvection' pertains to any induced circular motion.
It can be
generated about yaw, pitch, or roll axes given the proper stimulus,
that is, a continuously moving visual field of significant size, contrast and believability to create the illusion that it is the subject
who is actually moving
(Dichgans and Brandt, 1973; Young et al., 1973).
The structure of the semicircular canals, which measure angular accelerations and not steady state motion, must be considered in accounting
for the phenomenon (Brandt et al.,
1973; Dichgans and Brandt, 1974).
Once an initial conflict time has been overcome, one can believe that
steady bodily motion exists since it receives no cues to the contrary,
and the visual signal is in complete agreement.
In this thesis, self
motion about the roll axis was studied in an attempt to gain further
insights into the cause and effect of the Visually Induced Roll (VIR)
illusion.
It is known that when standing, the observation of a rotating
visual field produces a sensation of tilt, in the opposite direction
to field rotation, of approximately 10 - 15* from gravitational vertical (Dichgans et al.,
1972; Held et al.,
1975).
The visually induced
tilt is apparently constrained by veridical input from the otolith
8
organs resulting in a paradoxical sensation of continuous motion at a
constant tilt
(Finke and Held, 1978).
In the supine position, however,
this paradoxical sensation gives way to one of continuous motion about
the vertical in a direction opposite to the visual field.
Here, the
otoliths no longer provide conflicting information about the gravity
vector.
We are
thus able to time this motion, termed circularvection
(CV), Visually Induced Roll (VIR), or just vection, and correlate it to
actual visual field motion.
It is also known that moving visual fields
cause many involuntary eye movements (Young, 1972; Young and Henn, 1975).
Constant linear motion produces a linear nystagmus, a combination of
slow phase tracking motions in the direction of the moving field and
fast phase saccades in the opposite direction which reorient the eyes
within the orbit and reorient the changing visual field on the retina.
This type of eye motion can easily be understood in connection with
watching fence posts out the side of a car window, where the eye tracks
a single post until it is past and then reorients to catch another.
These types of eye movements have been documented in yaw CV by Jen Kuang
Huang (1978) and in yaw motion in a rotating chair by Tole (1970) and
Guedry (1962).
In viewing a field which rotates about the line of sight, it is
noted that the eye again performs a nystagmus motion - this time in a
rotary direction.
The eye appears to follow the visual field in a slow
phase rotation, attempting to keep the visual field fixed on the retina,
and performs a rotary saccade back to again position the eye in the
orbit (Edelman, 1979).
These torsional eye movements have been termed
ocular torsion or ocular counterrolling
(OCR) in the literature.
Although
9
OCR is commonly used to refer to the static torsional movements acting
compensatory to the rotated gravito-inertial force (GIF), the term OCR
will be used in this thesis to reflect all torsional eye movements,
since it is clear that any positive rollof the eye must be accompanied
by a counterrolling motion.
The study of the correlation between these two phenomena, i.e. CV
and OCR in VIR, and their physical importance are the main objectives
of this thesis.
The effects of various visual patterns, types of vision
and other influences on vection are also addressed, as well as the interplay of gravity and tactile cues on OCR and CV..
10
CHAPTER 2
BACKGROUND
2.1
Ocular Counterrolling
A method of OCR recording was attempted as early as 1889 by
Methods attempted since that time have included:
Orchansky.
images,
contact lenses,
sutures on the conjunctiva,
after-
attachment of mirrors,
sheets of metal, polarized lenses and objects extending on stalks to
the eye.
Each new technique, often claiming higher accuracy, found a
new result.
As a result, static OCR, induced by varying GIF, went
through periods of acceptance and rejection, with final proof not fully
realized until the early 1960's.
A full review of all the past tech-
niques, however, is not called for nor offered here.
in the MIT Sc.D. Thesis of Byron Lichtenberg
OCR measurement was adopted for this work.
(1979),
It can be found
whose method of
The mechanics have been
changed only by the fact that we have moved to binocular recording.
The method is straightforward:
35 mm photography of the eye is enlarged
50 times on an X-Y plotting screen.
Two iral landmarks are selected
with 4 repeats of each landmark entered for assurance of accuracy, and
an angle obtained in reference to a fiduciary affixed to the skull via
a dental biteboard.
Standard deviations calculated on the four repeats
of the iral landmarks range from 0.2 to 0.8 degrees, with the lower
range being obtained at the expense of time and money on the Hermes
Senior Film Analyzer (HSFA), the device used to determine the iral coordinates.
The actual calculations of eye angle and plots of such are
11
done by digital computer through programs established during the work
of Lichtenberg.
The major drawbacks of the present OCR measurement system are as
follows:
1)
Cost and time:
The system involves slow and patient frame-by-
frame analysis on an expensive analyzer that is logged into a PDP-8
computer.
Analysis rates of 20 frames/hour appear to be unsurpassable
with losses in accuracy occurring if scanning is rushed any faster.
With data acquisition occurring at 3 frames/sec, and 126 frames per data
set with numerous subjects being recorded, the result is many hours of
tedious labor.
Cost of the system and scanner alone runs on the order
of $1.25 per frame, with computer computation and film developing costs
causing that figure to be nearly doubled.
The process from data acqui-
sition to a plotted output can take a minimum of one week, with the
norm running closer to one month when any volume of data is required.
2)
Sampling rate:
Although it appears possible that future im-
provements will push the sampling rate to 5 frames/sec, it remains at
3 frames/sec.
The flash electronics are unable to operate much above
the 3 frame/sec rate presently employed.
This slight improvement, how-
ever, may not be enough to see exactly all the high frequency components
of OCR.
Torsional nystagmus, as generated by a rotating visual field,
appears to have a high frequency component that cannot be fully understood or modelled until the dynamics can be extracted from traces of
eye position curves.
The sampling theorem would dictate that many of
the torsional sacccades are missed and that it
is impossible to even
12
measure slow phase velocities.
Measurements made by Edelman (1979),
using a video system, indicate that even a 60 Hz sampling rate is
questionable in obtaining the frequency response of the system.
3)
Accuracy:
The system appears to work well for measuring the
angular displacements induced with a rotating visual field, but it may
not have t11d resolution to accurately determine deviations of less than
10.
It is valid to ask whether this is needed in any case.
As reported
by Miller (1962) and later authors, there appears to be an amount of
noise in the eye positioning system.
Exact
repetition of conditions in
varying the GIF does not necessarily produce the same amount of OCR,
even in the same subject on the same day.
This noise, presumably not
introduced by the measurement system, is on the order of 1-2*.
There-
fore, as long as the measurement system is better than the noise factor,
the underlying results will be obtained through the averaging methods
involved in most types of analyses.
It is therefore felt that of the
three drawbacks listed, only the first two are of real concern.
13
2.2
.
Circularvection
The term vection or CV was first used in 1930 by Fischer and
KornmUller andby Tschermak when referring to the perception of self
angular motion created by viewing a rotating visual field.
This
'illusion' can be generated around all three body axes; pitch, roll
and yaw, given the proper stimulus
(Young and Oman, 1975).
Not until
the 1960's and '70's, however, was any physical importance placed on
the role of CV and OCR.
Even today, the amount of reliable information
on the interaction of CV and OCR is limited.
A considerable amount of
work has been done in yaw CV, that is, motion around the vertical body
axis.
It has been documented (Dichgans, Young, Huang, Zacharias, to
name a few) to generate nystagmus motion in the eyes, and to show adaptation characteristics similar to those created in self angular rotation.
The close relationship between the vection sensation and the generated
nystagmus, however, is still under question.
For example, Brandt et al.
(1973) state "Vection is basically independent of the direction of eye
movements".
This was demonstrated in yaw CV by presenting a small cen-
tral pattern moving in one direction and a peripheral field moving in
the opposite direction.
Circularvection was dependent on the peripheral
field while nystagmus was dependent on the central.
In roll vection,
however, this independence has not been shown.
In fact, a previous work reports the opposite conclusion.
Finke
and Held (1978) report that ocular torsion, as they call and measure it,
is a function of the viewer's state, with more torsion occurring in
State 2.
They have defined states as:
State 1 - Observer experiences
14
self motion opposite in direction to the observed field;
State 2 -
Observer feels no self motion and only sees the moving visual field.
Their method of OCR measurement, however, can be questioned.
They use
an after-image technique of flashing a bright bar of light on the subject's eye, and have him align a pointer along the after-image created.
It is presumed that this can accurately reflect the amount of ocular
torsion induced by the rotating visual field.
Fluur
(1974) has con-
cluded that this technique leads to a large uncertainty
and there is
some evidence that after-images induce perceptual phenomenon (AubertMuller effects) which may cause faulty compensatory eye movements.
In
addition, this method presumes a steady and slow rolling movement of
the eye and is unable to measure or even account for the rapid torsional
saccades seen in this investigation.
The results obtained by Finke and
Held are therefore open to further study and thus provide some of the
motivation for this present investigation.
The limited number of works studying circularvection about the line
of sight - roll circularvection - is one of the reasons for the
clear knowledge on the subject.
lack of
Beyond the work just mentioned by Finke
and Held (1978), no work has studied CV and OCR ina supine position.
It has been studied in an upright or standing position, where the feeling
of self motion at a constant tilt becomes quite paradoxical.
When
standing erect, the otolith organ is thought to mediate the system and
prevent the sensation of continuous motion.
If continuous motion were
accepted, it would necessarily have to be accompanied by a sinusoidally
varying utricular otolith cue (Dichgans et al, 1972; Held et al, 1975).
This perception of tilt can also be mediated by affecting the effectiveness
15
of the otoliths to discern vertical by placing them out of their optimal
horizontal plane (Howard and Templeton, 1966; Young, 1974).
It is clear that the complex visual vestibular interaction is not
fully understood.
To this end, several studies have looked to under-
stand which "division" of the visual system interacts with the vestibular
system.
As reported in Perception (Held et al.,
1978), "The retinal
periphery as opposed to the center of the visual field dominates the
perception of stationarity as well as CV
(Brandt et al.,
vection (Dichgans and Brandt, 1974; Held et al.,
(Lestienne et al., 1977)."
1973),
roll
1975) and linearvection
Specifically, in studying CV about the yaw.
axis, Brandt et al (1973) state, "stimulation of the central visual field
up to 30* in diameter almost never leads to CV, whereas exposure of the
same stimulus to the retinal periphery may be quite effective.
Conversely,
masking the central field up to 600 in diameter doesn't impair CV and
diminishes the apparent self motion velocity only slightly with the mask
subtending 120*."
study since it
Held
(1978),
This statement was also under investigation in this
appears to be in contradiction with studies by Finke and
Wolfe and Held (1978)
and Merker and Held (1977),
who used
visual fields of 122*, 1000, and 130* respectively to generate OCR and
CV.
These three studies found the illusion to be quite satisfactory
even with the limited visual angle.
Brandt himself used a visual field
subtending only 132* in a research project on "Foreground and Background
in Dynamic Spacialization"
(1975)
and found this to be an acceptable
visual stimulus.
One other question appears in trying to find the optimal rotation
speed and pattern to induce CV about the line of sight.
Three papers of
16
Held et al mentioned previously used rotation speeds of 40*/sec, 27*/sec
and 20*/sec respectively.
Brandt et al. (1975), on the other hand, used
a rotation speed of 50 */sec.
All found saturated vection, where the
observer perceives self motion and sees no motion on of the visual field.
The patterns used were similar.
The first three used a pattern of 'vis-
ual noise', small irregular white speckles on a black background.
Brandt study was aimed at finding the optimum pattern.
The
His choices
were randomly distributed contrasts ranging from 1 to 72% coverage with
each single contrast composing 1/4% of the total area.
He reports
"visually induced self motion is saturated when about 30% of the visual
field is moving."
The importance of this finding beyond the phenomen-
oligical level is questionable.
Brandt's work finds the background and
periphery to be of greatest importance in spatial orientation.
Why?
Wolfe and Held state that OCR or ocular torsion, as they call it,
is mediated by a different process than CV.
Finke and Held complement
this by stating that ocular torsion is driven by self perception of
tilt and that this is independent of the "competing inputs provided by
the vestibular system".
This finding, however, is questioned in the
light of the methods used.
The OCR method, as described earlier, was
quite subjective and limited in accuracy.
The measurement of subjective
tilt was used in both a standing and a supine position.
Yet it is docu-
mented that supine viewing of a rotating visual field causes continuous
self motion about the visual axis (Dichgans et al, 1972; Young and Oman,
1975).
This tilt angle measured, therefore, has little or no reference
to the experienced motion.
In contrast to the finding of Finke and Held,
Merker and Held report that OCR induced by head tilt and field rotation
17
sums in a predictable fashion, indicating that the process is indeed
vestibularly driven in part.
In another vein, the question is posed, "What is the reasoning
for the static OCR observed by Miller (1962) and others?"
Has it
evolved as a method of keeping the visual image fixed on the retina?
It can't possibly account for full head rotation, but the eye appears
to be able to counterroll equivalent to small head head rotations that
would be common in everyday survival movements.
But are the OCR move-
ments seen in VIR driven by the same mechanism?
The central nervous
system (CNS), viewing a visual field rotating in a clockwise (CW) direction, could interpret the visual information as indicating that the
observer was falling counterclockwise (CCW) or to the left.
This action
would elicit, in turn, a counterrolling of the eye in a CW direction,
opposite to the direction of supposed fall or tilt, and in the same
direction as the rotating visual field.
Most of the discrepancies and questions in the literature will be
addressed in one form or another in this thesis.
The OCR measurement
system was improved upon in hopes of getting higher resolution and a
faster sampling rate and at the same time eliminating the subjective
measures commonly used.
The work was done on subjects in 1 g, 2 g, and
zero g environments, with more work proposed for all conditions in hopes
of exactly sorting out the gravitational influences and thus otolith
influences on CV and OCR.
Conditions were kept as constant as possible,
but refinements were made as problems came up or improvements were suggested.
The overall objective was to fully document the phenomenon as
observed and to attempt to postulate reasoning for the underlying causes.
18
2.3
Motivation
The question may well be asked of CV and OCR in VIR?'
ready know?
'Why bother studying the phenomena
What is it going to tell us that we don't al-
Studied strictly by itself,
probably not all
that much,
but seen in the light of many other research projects dealing with this
and similar phenomena, it is hoped that we may gain a better understanding of the vestibular system and man's ability to utilize it.
The visually induced roll experiment is an integral part of a
Vestibular Experiments Package proposed to NASA in 1976 by Professor
L.R. Young and coinvestigators of the Man Vehicle Laboratory/Center for
Space Research at MIT and by the D.C.I.E.M. in Canada.
The package was
selected for flight onboard the ninth Shuttle mission - the first scientific
and life
sciences mission.
The seven experiment package is de-
signed to cover several aspects of man's adaptation to weightlessness,
with the overall scientific question being:
"How does a fully developed
sensory-motor system, which receives partially redundant information
from several sensory mechanisms, reorganize to account for the loss of
usable information from one channel because of environmental variation?"
The seven experiments, out of 100 total experiments being flown,
are to be repeated several times, or are continuously recorded throughout the mission,
in order to obtain the desired adaptation information.
The experiments are:
1.
Measurement of perceived velocity during linear acceleration
on the Space Sled.
4
19
2.
Measurement of eye deviation and ocular counterrolling during
acceleration on the sled.
3.
The perception of self motion and ocular counterrolling induced
by a rotating visual field.
4.
Awareness of body image and spatial localization.
5.
The timing of lower leg muscular activity during "hopping"
and during constant velocity and constant acceleration "falls".
6.
Susceptibility to motion sickness.
7.
Pre- and post-flight vestibular tests.
Experiment number 3 provided the impetus for this thesis.
objectives of experiment 3 are two-fold:
and magnitude of the sensation of VIR, and
ated with VIR.
The
(1) to quantify the latency
(2) to measure the OCR associ-
The hypothesis is that in zero g, the latency of onset
of CV will decrease, the feelings of vection will be stronger, ocular
counterrolling more prevalent and the subjective measurement of rotation
speed closer to the actual visual field speed.
In all, it is hoped that
by watching the adaptation of man to weightlessness over a seven day
period, some valuable information can be gained on man's use of his
vestibular signals.
Again, the question can be asked, why?
One reason is the continuing quest for knowledge.
Man is always
in search of the unknown, and is continuously questioning his surroundings and experiences.
Why does man get seasick?
Or most recently, spacesick?
Carsick?
Planesick?
The motions induced in these activities
are surely not more severe than running through a jungle, swinging on
a vine or wrestling, yet have you heard of a single incident of motion
20
sickness caused by running?
It is only since man has created alternate
means of transportation that any such symptoms have been recorded.
Strictly speaking, there is little known about man before he could
travel, at least by sea or camel.
But there is no evidence of animals
getting motion sick in their own environment.
ever, be generated in nearly all species
external, unanticipated motion.
Motion sickness can, how-
when they are exposed to
The vestibular system is a very well
adapted system that has evolved over the course of evolutionary history.
And on this time scale, man's venture into these alternate transportation
or motion devices has come in a short span, much too short to allow for
any evolutionary changes or adaptations.
Most people are able to over-
come the feelings of sickness in cars and everyday activities simply by
experience and prediction.
It is the unexpected motions that tend to
disturb the vestibular system and cause nausea.
First time air travelers
are much more prone to air sickness than are trained pilots.
In the most recent mode of transportation, space travel, there
have been numerous reports of motion or space sickness in both Russian
and American missions (Table 1).
all travelers get sick.
As can be seen from the table, not
There were no reports of nausea of any type
on the early Gemini and Mercury missions.
available.
Several explanations are
The vehicles were small and the astronauts strapped down
for the most part.
Work loads were high and all were experienced test
pilots with a great deal of experience with similar sensations.
As
vehicles got larger, - Apollo, Skylab and Soyuz - the number of incidents
increased, as did the number of inexperienced pilots.
Scientists began
21
SPACE SICKANESS IN MANNED SPACE FLIGHT PROGRAMS
.as Compiled by C.M. Oman, MIT.
UNITED STATES
. PROGRAM
MERCURY
GEMINI
NUMBER OF CREWMEN
MOTION SICKNESS INCIDENC>
6
16
0
0
33
11
APOLLO:
COMMAND
MODULE
LUNAR
12
.SURFACE
SKYLAB
9
5
SOVIET UNION
VOSTOK
VOSKHOD
.SOYUZ AND
6 .
5.
55
1
3
22
SOYUZ/SALUT
TABLE 1.
Incidence
of reported Space Sickness
A
22
to fly as experiments became more involved and required more technical
expertise.
It was found in the longer duration missions that the motion sickness symptoms
(elicited as pallor, sweating, dry mouth, yawning, nausea,
retching, or vomiting) went away after five to seven days, and thus
hampered only the early part of the mission.
Considering, however, that
the nominal mission for the Shuttle - the mode of space transportation
for the near future - will be seven days, space sickness will be of
extreme consequence, especially in an emergency.
Light nausea can cut
a crewmember's workload ability in half, if not more, and in the event
that a pilot was sick, landing could be altogether out of the question.
With individual maneuvering units in the planning stages, the picture
could get much worse.
What are the solutions?
Anti-motion sickness drugs appear to be
a quick, easy answer, but they have several drawbacks at present.
They
are not universally effective, just as everyone is not equally susceptible.
They also have side effects, as do many drugs, which vary with
the individual, the day, and the drug.
Drugs are not exactly satisfactory
because they are trying to affect a system that is not fully understood.
Therefore, the only solution- is to attempt to understand the vestibular
system, how it works and passes information on to the brain, and, in
turn, how the brain processes and uses this information to balance, move
and carry on normal bodily activities.
It is obvious that the brain is capable of adapting to weightlessness within a week, or immediately in some cases, but what are the
mechanisms used to effect this change?
Without going into great detail
23
about the mechanics or exact transmission characteristics of the vestibular system, some understanding is needed to see how gravity could
affect the system.
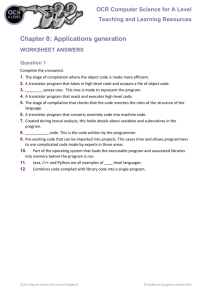
The vestibular system is composed of two essentially
redundant systems, each located in the inner ear (Figure 1).
The semi-
circular canals (SCC), oriented orthogonally to each other, sense angular
accelerations in all planes
(Wilson and Melvill Jones, 1979).
The system
should be essentially independent of gravity and only referenced to
inertial space.
The SCC system, which includes transfer paths and the
CNS, has been modeled as a second order feedback system with two important time constants (Young and Oman, 1969)
(Figure 2).
The first is
the latency time for sensing a step in acceleration, on the order of
The second time constant, which applies to the full
1/25 or 0.04 sec.
canal-CNS vestibular system, can be thought of as the time required for
the initial sensation of acceleration to die out, even in a continuous
spin condition.
It's value is approximately two times longer than the
time constant for the semicircular canals themselves, and is under debate,
but has been approximated at 10-20 sec.
sec has been given.
Here a value of 1/0.0625 or 16
This second time constant should play an important
role in the latency of onset of vection times experienced in VIR.
How-
ever, as Young and Oman (1969) state, "While the form of the model is
based on what is known about the dynamic characteristics of the canals,
the models are of the non-rational parameter type.
The mathematics is
not intended.to reflect any exact physical mechanism in more than a
general way."
24
Crus commune
Cristo
ampulta
superior
Ampulla membranocea superior
~iculus
Cristo
anpulla
lateralks
U
Ductus endolymnphaticus
(TT
Sacculus
Ampulta membronacea
\
-
-
laterol;s
Cristo
am"pullaposterio\
Ampulla
metnbanocv=
posterior
1.rm
Fenestra
(Ova'
'estibuli
-
Scala tymooni
---
:_r--Ductus
coclleoris
,INV
windowl
Scol, voitibuli
Ductus coch I
Ductus reuniens'
Fenestra cochteoe
(Round winovw)
ris
'Helicotremo
29
FIGURE 1.
The Vestibular System and Inner Ear
25
Angular
1.56
Acceleration
Response
>--[-9
(s + 25)(s + .0625)
Torsion Pendulum
Canal Dynamics
Cn
0
0
Time
Response to Velocity Step
FIGURE 2.
Semicircular Canal Model and Plotted Response
from Young & Oman (1969)
26
The other balance mechanism contained within the inner ear is
gravity sensitive.
The utricular and saccular otoliths are small
linear accelerometers positioned to measure acceleration in all three
planes (Wilson and Melvill Jones, 1979).
In the absnece of gravity,
however, the message obtained from an acceleration or from the otoliths in general is erroneous.
Miller (1962) proposed a model for static OCR based on data
gathered from slow rolling of a subject with respect to gravity and
measuring the induced OCR.
The model proposed is strictly
a fit
to
the data and proposes no physiological foundation apart from the
known alignment of the related organs.
It is shown in Figure 3.
As can be seen, it is referenced strictly to the gravity vector, and
gives no indication of eye position in zero gravity.
A dynamic model
for the otolith system as proposed by Young and Meriy (1968) may be
more enlightening for the weightless environment.
The linear model
relating specific force to perceived tilt or linear velocity is also
described in Figure 3.
This model too, however is based on measure-
ments made in 1 g and may not reflect the motions perceived in zero
gravity.
Thus, in weightlessness,
motions which appear visually to be
perfectly normal, send vestibular cues to the CNS which may be in
total contrast.
Similarly, while below deck at sea, a cabin will
appear fixed with reference to a contained observer, yet vestibular
cues may indicate motion of a dramatic nature.
These two situations
represent similar types of conflict between the visual and vestibular
27
Plotted Fit to
Miller OCR Model
('Yv~s),N
SINCCUA
J
.
OMPO-W-Ac'Uet
2
:§
'
g
,a
COM'wL
/
.
to
I
-M.a
I
I
.
I
.
-
(*g-*s)
/
I
.
I
-W
-3
-Mo
-W
cagTa.L.G,
12
0
a
so
G.
1A2
ISO
144
HEAD TLT (DEGRES)
A.
Miller OCR Model
t4,ignate th angle o tilt x as the angutar disl:eument
of the cephaIocalu(ta I a
ite
hnit d tromw vertical.
hIli
equations ror
counterrolling ( ) for varif
deigrees or lateral tilt caII he written as follows:
VT=
V+
-Uctis; 2(276-3:)
os?(
1:14-x) -S.1J
WS :UtosN(84-x)
+ SI~co.o
where
226- x)
ipT is tilt- tial amitllit itf
a nii
IlterrtIllilg (
Istun
ill utrictila.,
ad
I ,,. L. etv. rejpriseWt the iuma \.i in;
r4lltriliutcI h\' v'tchIllmaitla.
sat'tlaitf, ij'.. eoluj,ijuiten)
n
)eIliig
diliotllit of ot'ti t
1.5
LATERAL SPECIFIC FORCE
(TJLT ANGLE WR.T. EARTH)
(S
\'wlitre
(S
+ 0.076)
(S+
+0.19)
1.5)
PERCEIVED TILT ANGLE
I
PERCEIVED
OR LATERAL ACCELERATION
S
LINEAR VELOCITY
Young Meiry Model
& Curve Fit to Data
7
6
1.5)
(S +
I
5
EXPT. DATA ( I STO. DEVIATION)
MODEL (MECH ONLY)
-OTOLITH
4'
-N-
z
IUj
21
o
.01 .02 .03 .04 .05 .06 07 .08 .09
ACCELERATION
(G)
Time for perception of constant linear acceleration
FIGURE 3.
Miller Model of Otolith Mediated OCR Response
& Young Meiry Model of Otolith Response
28
systems which often lead to motion sickness.
It is hypothesized
by Reason, Benson, Oman, Young and others that it is this conflict
which produces motion sickness and that with habituation, the conflict and thus the sickness can be overcome.
It is the method of
habituation that is under scrutiny.
In visually induced roll, a conflict is generated between the
vestibular and visual systems.
Initially, observers of a constant
rotating visual field report only field motion.
After a short latency
period of 1 to 10 sec, however, the observer reprots self motion in
a direction opposite the visual field, with the apparent motion of
the visual field ceasing.
Immediate perception of self motion would
necessarily have to be accompanied by
a semicircular canal cue in-
dicating a step acceleration in angular velocity.
However, constant
velocity rotation requires no semicircular canal input since the SCC
only senses acceleration.
Experiments performed in constant rotation
of human subjects about the vertical axis report that after a latency,
the subject feels no rotational motion, nor does he indicate any
vestibular cues of rotation such as nystagmus
1970; Bock, 1979).
(Guedry, 1962; Tole,
In the same sense, once the time constants for
the SCC have died out, self motion is perceived when viewing a rotating visual field.
It is hoped that by watching how the absence of
confirming otolith cues in zero g change this vestibular inhibition
of VIR that a better understanding of the roles of each organ in the
balance mechanism will be obtained.
29
The static response of OCR is thought to be otolith mediated
(Dichgans, 1972; Held, 1975; Miller, 1962; Graybiel, 1968).
Yet,
in zero g, the otolith organ is rendered useless as a static orientation sensor.
Cilia of the otolith no longer remain bent under the
influence of gravity and thus otolith influence on OCR is minimized.
This is the case for supine observation of VIR in a 1 g environment.
The utricular otolith is in its least sensitive position, yet the
saccules are still transmitting accurate information.
The saccules,
however, do not present a conflict to the visually induced self motion.
It is hoped that by comparing 1 g and zero g data in both a standing
and supine position that further useful information can be gained
about the otolith function, its effect on OCR, and its adaptation
to weightlessness.
Therefore, the data collected in zero g will have
two components to match with ground based results.
VIR will be recorded for onset and OCR measurements.
First, free float
(Subjects will
be restrained by a biteboard to keep head position constant and allow
for OCR measurements.)
Second, the same measurements will also be
made on a subject who is exposed to the tactile equivalent of a 1 g
environment.
The subject will don a harness
to which are connected
four shock (bungee) cords which will exert the equivalent force upon
the subject's body and legs that he would experience in 1 g.
This
should help to sort out the effect of tactile stimulus on the VIR
sensations as compared to the strict otolith cue.
To gain additional background knowledge on the effects of tactile
stimulus both on earth and in short zero g parabolic flights, an equivalent tactile sensation was generated through foot pressure.
W
---
-0 w"d-b--
Room 14-0551
77 Massachusetts Avenue
Cambridge, MA 02139
Ph: 617.253.2800
Email: docs@mit.edu
http://libraries.mit.edu/docs
MgLibiraries
Document Services
DISCLAIM ER
MISSING PAGE(S),
Page 30
31
Adjustable foot restraints were available both in the laboratory and
onboard the KC135 aircraft for applying a tactile sensation of down
while still lying in a supine or right ear down position, respectively.
Although not as effective as hoped, it provides a basis for helping to
sort out the influences of OCR and CV in VIR.
32
CHAPTER 3
METHODS
3.1
Visual Pattern
Three separate patterns were used to create the illusion of self
motion about the line of sight.
For the first crew training and test-
ing of the Spacelab astronauts in February 1979, the pattern consisted
of a gray anodized aluminum background with a 3% coverage of 1/4" diameter random black dots.
Second,
the
for the parabolic KC-135 flights,
pattern was a blue and white flowered wallpaper pattern inserted on
the front face in an annulus around the OCR camera and cylindrically
around the dome extension (Figure 4).
Viewing for the above two pat-
terns was monocular and depth of field limited to 8 inches.
The third
pattern used in the final testing in September 1979 and for later laboratory subjects was a white background with 20% coverage in six colors
of randomly placed 3/4" diameter dots (Figure 5).
In addition, the
depth of field was increased to 14" and viewing was changed to binocular.
The colors chosen for this final pattern were fluorescent green,
fluorescent red, dark blue, light blue, dark red, and dark green.
size and coverage of dots followed from a paper by Brandt et al.
The
(1975)
who found 30% coverage to be optimum (with 10 and 72% being his two
nearest comparisons) with 0.25% of total area per dot.
In our config-
uration, this led to each dot being 0.886" in diameter, which was approximated with 3/4" diameter Avery labels.
They were affixed in a
random manner over the entire surface with equal numbers of each color
presented.
A separate study performed after the KC-135 flights was
M-7
tJ
j
I
.1,
A
/
V ri --%
V. ,
i
46
*
Mcdz"
.. "
-
A-4
I.
FIGURE 4.
'4
Photograph of Dome Pattern & Apparatus on KC-135 Flights
34
17"
8"n
6"1
Side
Top
View
Extension
View
Camera and Ring Flash
FIGURE 5,
Photograph of Present Pattern and Dimensioned Dome.
35
aimed at correlating visual pattern, viewing style, and vection quality.
It is discussed in further detail in Section 4.3.
The surface upon which the patterns were placed was a 17.5" diameter 'dome' that is presently 14" deep and thus subtends a full 180*
visual angle.
The center of rotation is cut out to a 3 1/2" diameter
(13.50 visual angle) through which a circular ring flash and 35 mm
camera are visible (Figure 5).
The rotation speeds used to induce
vection were 30*/sec, 45*/sec, and 60*/sec, with additional testing
performed at 15*/sec onboard the KC-135.
36
3.2
OCR Data Collection
The methods of data collection for this experiment were fairly
For the 1 g laboratory testing, the dome and apparatus were
simple.
mounted on four legs (Figure 6).
The subject lay supine under the
dome, with his entire field of vision filled by the random pattern on
the inner dome surface.
aluminum headrest.
His head position was fixed with a foam and
Positining was not a severe problem in this case
since no subject movement was involved.
A Nikon F2 35 mm camera, equipped with a 105 mm microlens, 250
frame film magazine, motor drive, and circular reworked Honeywell Prox0-Lite ring flash (Figure 7) were mounted through the center of the
dome so as to have a full view of both of the subject's eyes.
The
visible camera lens and ring flash subtended a central visual angle of
13.5* at a distance of 14",
Early experimentation involved using only
monocular vision and recording.
The second eye was covered with a
patch and the focal area was reduced with a PNinclude only one eye.
extension tube to
This method was abandoned for several reasons.
Binocular photography provided more focusing range, greater depth of
field,
better vection with binocular vision and more available light,
as well as providing the added binocular data.
The protocol used in data collection remained constant over all
subjects.
Each subject was exposed to six dome runs of three speeds
(30, 45, and 60'/sec) in two directions (CW and CCW as defined from
the subject's point of view) in random order, each lasting 50 seconds.
Vection infromation was gathered throughout the run - the methods for
37
LOverview of Apparatus
i(Camera
Power Supply
& Controls
Output Signal to Tape
FIGURE 6.
Several Views of Laboratory Apparatus
Dome Extension
I.
Aluminum & Foam Headrest
Background
Light
Subject Signal Button
FIGURE 6 (Cont.)
Several Views of Laboratory Apparatus
I
Camera & Flash
Control
Dome
Control
N
s
FIGURE 7.
Photograph of Nikon Camera used for OCR Recording
40
which will be discussed later.
Photographs of the eyes were taken at
a rate of three per second at the following times during the run:
beginning at 1 second before dome operation and continuing through
the first 2 seconds of rotation, at the 25th and 26th seconds of
rotation, and on the 49th and 50th seconds of operation, with the last
second of operation (i.e., the last three photographs) occurring after
This gave 21 photos per run or 126 per session.
the dome had stopped.
Each 250 frame cassette
could then hold two complete data runs before
camera reloading was required.
To provide a reference for monitoring eye movements, subjects
were fitted with a bite board fiduciary.
The mouth piece was fitted
to the subject's upper teeth with Kerr Dental Compound.
This assured
a tight fit and yet allowed the subject to make comments as to the
quality of vection.
Two small dots were affixed to the small metal
appendages of the mouthpiece.
These appendages were then bent to pos-
ition the dots within the picture frame and at nearly the same focal
range as the subject's iris (Figure 8).
*The subject was instructed to
keep the bite board tight against his upper teeth at all times.
the fiducial marks (small dots)
and therefore
Thus,
remained fixed to the subject's skull
provided two accurate landmarks for determining a ref-
erence line from which to measure counterrotations of each eye,
This
is felt to be a major improvement over a previous method adopted by
Graybiel (1959) of affixing landmarks to the skin near the eye, as
these were subject to a great deal of movement with respect to the
skull.
FIGURE 8.
Mouthpiece and Fiduciary
Scaled and in Place Photographs
42
The subject was also instructed to maintain a constant gaze into
the camera lens:
subjects either chose a reflective spot on the lens,
the shutter, or 'focused
ever they preferred.
on infinity' through the camera lens, which-
This kept the influence of eye position and gaze
on vection to a minimum, and thus improved the repeatability of the
experiment.
It also kept eye movements from interfering with the
analysis of the data.
As pointed out by Miller (1962), it is easily
seen that moving the eye horizontally through a large angle could produce distortions in the actual angle seen between two landmarks when
the eye is projected onto a flat screen, as it is in data reduction,
These distortions were assumed to be negligible in the data analysis.
Another previous source of error and concern in photographic OCR analysis, film slippage, was not present in this study.
This was a con-
cern of Miller's (1962) and was eliminated as an error here since this
method of analysis removed film orientation from the calculations,
which were strictly based on fiduciary versus eye angle.
In addition,
film stretch was considered negligible or, at worst, a constant over
all measurements.
43
3.3
OCR Analysis Methods
The photographic film used in the 35 mm camera was Kodak Ectachrome
color film for slides with an ASA rating of 200.
It was shot at F-4
for brown eyes and F-5,6 for blue or green, at an ASA setting of 400.
The 250 frame cassettes were- then developed by Image Maker Inc. (440
Summer St.,
Boston, Mass.) through a bulk processing method.
The film
was processed and 'pushed one stop', a photographic term for overdeveloping, since we had purposely under-exposed it during shooting.
This produced slightly more grain in the film, but brought out as many
landmarks as possible.
The film was returned to us as full length
rolls, which prevented any mis-ordering of frames and allowed the film
to be spooled for analysis on the Hermes Senior Film Analyzer (HSFA).
Each frame was numbered with a four digit number and correlated with
vection data as to time and sequence of exposure.
Time on the HSFA was rented from the MIT Lab for Nuclear Sciences
(LNS) (in the Polaroid building at Technology Square, Cambridge) and
scanners were then hired to run the analyzer for data reduction.
The
HSFA enables the images on photographic film to be accurately plotted
on an x-y scale.
The rolls of film are motor driven and positioned
for analysis by a vacuum system,
The film images are blown up 50 times
and displayed on a screen 64 cm by 64 cm.
The operator or scanner
locates identifiable landmarks on the eye by positioning the x-y film
table beneath a central crosshair, and enters their position into the
HSFA, whichis connected to a PDP 8 computer for data storage.
The
scanner first enters the frame number and then the reference angle from
44
the two points on the fiduciary marks which are securely
head via the aforementioned biteboard.
fixed to the
The scanner next picks two iral
landmarks located on opposite sides of the eye which appears on the
left side of the screen.
(Because of the reversals created by photo-
graphing upside down, numbering frames on the backside of the film for
permanence, and magnification in the HSFA, this is actually the left
eye projected as it would be seen in a mirror.)
Scanners were instruc-
ted to choose points located as closely as possible to the horizontal.
This prevented the landmarks from being obscured even if the eyes were
partially closed, and kept the angles measured from being near the
singularity in the tangent function used to calculate averages in later
analysis.
The scanners were also instructed to choose points located
as far radially as possible from the pupil.
due to pupil constriction to a minimum.
This kept the variations
Further discussion of this
subject is contained in Section 4.5.
The scanner repreated entering each iral landmark into the HSFA
four times, thus giving repeatibility, resolution and accuracy information from the standard deviation of values obtained in further analysis.
The analysis programs used later allowed for more or fewer
data points, since it is exremely easy to lose track of the number of
repetitions entered.
The scanner then went on with the same procedure
on the other eye, and then onto the next frame.
The nature of the work
necessitated working in short segments, so the scanners were requested
to sketch the landmarks used in each session for identification when
returning, in order to retain initial position information,
The volumes
of data collected, however, necessitated the use of several scanners,
45
so each scanner change repeated the previous three frames to reference
the base angle.
A further .discussion of this topic is contained in
Section 4.4.
Data from the HSFA was stored on magnetic tape and then transferred
out of LNS to the Joint Computing Facility VAX computing system on cards.
A Fortran program entitled BINOCIN (Appendix A)
originally written by
Anthony Arrott and revised to eliminate propagation of errors, was used
to divide the binocular data into two files,
cular reduction by a later program.
each formated for mono-
(This method was chosen since
ealier OCR recording had been monocular and thus the monocular program
was already in existence.)
The two files created for data from left
and right eyes were then run through a Fortran program entitled SCANOR3,
also written by Anthony Arrott (Appendix B).
This program calculated
the fiducial angle, average eye angle and standard deviation of the
angle from the x-y
coordinates as plotted on the HSFA.
each file
the identical fiducial information,
contained
Whereas'now
the program
used the following equations for calculating averages and standard
deviations with the variables defined in the sketch below.
C
(XL;y~
UU
Q
~rc~7ri
46
where:
8H is head angle with respect to the camera
E is the average of four repeats of eye angle with respect
to the camera
and p =
E
eH;
p
therefore
=
eye angle with respect to
the head.
The formulas are as follows:
Y
-l
eH
-Y
RO
LO
=tan
4
E (Y
R
i=l
E=
tan
[
-Y
)
L
4
E
XR
i=l
XL)
i
i
The following equation is used to determine the standard deviations of
the angle obtained in the four repeats taken on each iral landmark:
r
[ ((XR
_
7Q 2+
[ sin 2
L
R
E (U2
EXR
+ cos 2 &E(G2
+
R
2)]
+ a2
X
]1/2
L
Angles determined by this algorithm resulted in a sign convention such
that positive changes in p from one frame to the next indicate counterclockwise rotation of the eye with respect to the head as seen from the
subject's point of view.
47
The output of SCANOR3, used to perform the above calculations,
One, labeled Filename.ANG, provided
the
frame number, measured angle, and calculated standard deviation.
The
was divided into two files.
other, labeled Filename.SCN, printed out the fiduciary points (in
millimeters of distance across the film), four repeats of the landmarks used, average and standard deviation of the four repeats, along
with head angle with respect to film, eye angle with respect to film,
eye angle with respect to head, and standard deviation of this eye
angle.
This file was helpful in sorting out caused for 'wild' points
in the data, which were usually a result of mis-entered points or
scanner keypunch errors.
Individual plots of eye angles were done on a Varian plotter from
the ***.ANG file.
A program entitled PPLOT allowed for adjustment of
the axes to include only data points within a given run, and to allow
scaling for varying amounts of OCR.
labeling of both axes.
The program also allowed for
Frame numbers, however were limited to a three
digit number on the scale, and thus a constant factor is added to the
label for identification.
The program could not plot standard devi-
ations, but the values were available on file.
Extra data points may
appear on individual graphs since PPLOT only allowed for X-axis scaling
in 2's or 5's, depending on the number of points requrested per plot.
Scale factors for OCR were varied between runs, but were kept constant
for left and right eyes on any single run.
nocular comparison.
This allowed for easy bi-
OCR scales generally range from 7 to 14 degrees.
Data files collected during the course of this project began to
use up large amounts of disk space at the Joint Computer Facility and
48
were therefore transferred to magnetic tape (labeled TAC01) for permanent storage and future reference.
labeled DOME01.RAW - DOMEO8.RAW.
Raw date from LNS is under files
Separated files for the right eye
are under DOMER01.DAT - DOMERO8.DAT
ANG
ANG
SCN
SCN
or
RDOMEl.DAT - RDOME8.DAT
ANG
ANG
SCN
SCN
Data are stored similarly for the left eye.
49
3.4
Vection
The illusion of self motion created by the rotating visual patternwastrecorded
through a subjective position switch.
Subjects were
instructed to depress the spring loaded button twice when they first
began to perceive self motion, whether it
was saturated or not.
Satu-
ration was defined as self motion in which the visual field appears to
come to a complete standstill and it is only the observer who is rotating.
In unsaturated vection, both the observer and visual field appear
to rotate in opposite directions.
The subjects were also instructed
to depress th6 button one short time each time they felt that they had
rotated through 90* relative to the room.
This allowed us to determine
whether vection was saturated or not, as velocities would be lower in
unsaturated vection.
push for every 450.
This instruction was later changed to 1 button
It was found, especially on the KC-135 flights,
that with 90* measures, it was easy to lose reference to where the
last button push appeared.
A study was done to compare these two
methods (i.e. 45* vs. 90* button pushes) and is discussed in Section
4.1.
The third instruction
to the subjects was to depress the button
two long times when the sensation of self motion ceased, called a
drop out.
(As has been reported in previous works, the illusion of
self motion comes and goes with little known about the cause.)
In
addition to the signal button protocol, the subjects were provided
with a microphone for recording subjective comments on the quality of
vection and on any additional experienced after-rotation seen or felt.
50
The button pushes were recorded on magnetic tape and later
transferred to strip charts for analysis.
The channel carrying the
vection information also contained the flash pulses from the camera
superirmposed over dome speed and direction information.
The schematic
for the electronics package, worked out by Robert Renshaw, is contained
in Appendix C.
It also contains a block diagram of the system, the
schematic for the dome controller and the flash unit, and a labeled
sample output.
In an attempt to simulate the experiments onboard Spacelab, two
full data sets (i.e. six runs of three speeds in two directions) were
taken on all the SL-1 science crew members.
prevent it from influencing the analysis.
The order was varied to
On one data set, they were
lying supine with feet fully extended to eliminate additional directional cues.
ject's
On the other runs, blocks were placed between the sub-
feet and the wall in order to simulate a 1 g tactile force,
This same simulation will be provided with bungees onboard Spacelab.
Care was taken that this force did not move the subject up and out of
the frame of the camera.
Comparisons are made for tactile vs. non-
tactile cues in Results chapter.
51
3.5
Vection Analysis
The analysis of vection data was fairly straightforward.
Indi-
vidual averages were obtained for each subject for onset of vection
times, drop out times, and subjective velocity.
The velocity infor-
mation was obtained by taking the average time between button pushes
and dividing by 45 or 90 , whichever was being signalled.
Individual averages will be useful for comparison with data collected on the Shuttle astronauts in Spacelab, and to watch their
adaptive changes.
Lumped averages of all subjects over one speed or
condition is useful in determining the overall quality of vection
presented by each condition.
The actual results are presented later
in graphic form.
3.6
KC-135 Methods
The parabolic flights flown on the specially equipped NASA KC-135
presented several problems in both the data collection and reduction.
By flying Keplerian or ballistic trajectories, it is possible to obtain
approximately 24 seconds of zero g
* 0.05 g,
2 g.
time with an accuracy of within
The physics of the system dictate a nearly equal period of
The time onboard was used to evaluate the OCR and vection pheno-
menon in both zero and hyper-gravity experiments, both qualitatively
and quantitatively, prior to the Spacelab mission.
Two sets of flights
52
were taken - KC1 (as it has been labeled) with Bob Renshaw and Professors Young and Oman as subjects on February 26-27, 1979; and KC2 with
the Spacelab Mission Specialists and Payload Specialists as subjects
on March 14-15,
1979.
In order to perform both the dome vection OCR study and a separate
OCR study during the zero g to two g pullouts, a suitable method was
needed to restrain the body comfortably, safely and accurately in a
position with the right ear down.
This position-allowed photographic
observation of the effect of 'turning on and off' the gravity vector,
similar to lateral accelerations created in the 'space sled'.
The
second experiment often necessitated turning the dome off prior to
pullouts to allow its effect on OCR to diminish before the gravitational
effects appeared.
Also, total zero g
time, on the order of 24 seconds
per parabola, did not allow for long runs in which to see good saturated'
vection, collect much drop out information, or see steady state eye
position and the effect the dome had on eye position.
The method adopted for body and head restraint was to use a medical
stretcher filled with a Full-Body Immobilizer (available from Picker
Corp., Boston, Mass.).
The Immobilizer, a bag filled with styrofoam
pellets, could be evacuated to form a surprisingly rigid cast which
could be molded to fit body contours.
Care was taken, especially around
the head and neck, to assure proper positioning within the dome and
relative to the camera, as well as a safe restraint for the 2 g pullouts.
The zero g to 2 g accelerations, however, often caused the subject to
move in and out of the frame of the 35 mm camera that was being used
to photograph eye position.
This movement not only caused the subject
53
and/or his fiduciary marks to leave the frame, they caused many
frames to be out of focus and thus to be impossible to analyze on
the Hermes Analyzer.
The same camera and control mechanism were used in the KC-135
as in the lab.
The dome, however, was mounted to a locking plate
release mechanism that allowed the dome to be slid into and away
from the subject's face.
This eased the entry to the dome as well
providing a quick safety valve for the nauseous subject.
(Nearly
all subjects reported nauseousness or actual vomiting for some part
of the set of KC-135 tests, including those on medication,
jects were sick during the dome runs however,
No sub-
The topic of drugs
is discussed more fully in a later section,)
As in the lab, vection was signaled with the push button.
Subjects indicated 90
on KC1 and 45* on KC2 (the protocol change
was made after experiencing the reference problem on KCl),
The
dome was run during 2 g, zero g and transition conditions, with
photographs taken intermittently throughout.
In keeping with the
Spacelab protocol, a system was devised to assess the effectiveness
of tactile cues in limiting vection.
The system involved two foot
pads that could be slid up and down the rails of the stretcher, and
could be positioned so as to prov.ide pressure against the bottom of
the feet.
Unfortunately, they were not as effective as had been
hoped because in zero g, the upward force resulted in an equivalent
pressure on the upper shoulders.
In the 1 g environment, this reac-
tion force was taken up in friction between the subject and the foam
pad on which he was resting.
Therefore, only a limited number of
54
runs were taken in this configuration.
A comparison, however, is
made between the two conditions in the Results section.
In addition,
several runs were made, without photography, in a free float position.
Subjects held themselves near the center of the dome with the handrails on the stretcher.
Little signalling was done for onset times
and velocities, but subjective sensation of vection was recorded and
the comments are
helpful in gaining an insight into the roles of
gravity and tactile sensations created within the confines of the
Immobilizer bag.
In addition to the acceleration problem on OCR measurements, two
equipment malfunctions caused several data runs, to be unanalyzable,
The first was a total loss of the voice channel for about 60 parabolas.
The second was the loss of the accelerometer trace for several
parabolas.
These failures went unnoticed until the analysis was
performed in the lab.
55
3.7
KC-135 Data Analysis Methods
The data collected on the KC-135 were analyzed with the same
methods as the laboratory data, with a few minor differences.
The
strip chart recording of the button pushes and camera flashes also
contained another channel of accelerometer readings for correlation
with the gravity data,
The. accelerometer
was not corrected for after the first
contained some drift
that
The precision of
calibration.
flight was assumed to remain within the * 0,05 g range claimed and
measured on earlier parabolas,
The other differences between the KC-135 flight data and the
laboratory data was in the film analysis.
The change to binocular
viewing and measurement occurred after the flights.
Also,
because
of the positioning of the subjects relative to the apparatus and the
gravity vector, the eye was rotated 90* relative to the camera,
governing equations
The
(see page 46) remained the same for the analysis,
with the variables now being defined as in the sketch below,
IJ
0]
C]OQ
] r3
0
J
1 00
C] f] 0 C, 10 13 T
o
O
D2
1
f
56
This rotation, however, led to gross errors in averaging when the
landmarks used resulted in angles that were averaged
singularity in the tangent function.
across the
(The preferred horizontal or
lateral landmarks were now lying along the vertical axis of the
Hermes Analyzer.)
To correct for this problem, the singularity
in the tangent function was rotated 900 for the analysis.
3.8
Subjects
The subjects used for the experiments were the prospective
Spacelab Mission and Payload Specialists from NASA and ESA (European
Space Agency), as well as others, both naive and experienced in CV.
In the laboratory experiments, the astronauts were all tested twice,
once on February 26-27, 1979 and again on September 27-29, 1979.
They were:
Owen Garriott, Micahel Lampton, Byron Lichtenberg, Ulf
Merbold, Claude Nicollier, Wubbo Ockels, Robert Parker and their
Life Sciences Coordinator, Gloria Salinas.
28 to 48, and are all male except GS.
subjects on KC2.
They ranged in age from
These same astronauts were
The subjects on KCl were Robert Renshaw, Laurence
Young and Charles Oman.
Much of the photographic data on the above subjects was lost
for various reasons;
(1)
The accelerations on the KC-135 flights
produced head movements large enough to put many frames out of
focus or out of the frame of the camera;
(2)
Late in the project,
57
after the dome had been modified to it's present high contrast
pattern, the flash was found to produce enough light to reflect
the random dot pattern ono the cornea of brown eyed subjects.
Focusing range on brown eyes was already minimal at F4, making
several frames out of focus.
This added moving pattern reflection
made the eyes impossible to analyze on the HSFA.
The blue eyed
subjects did not have the same problem as enough light was reflected
off the iris to overcome the reflected dots.
The rest of the sub-
jects chosen, therefore, were all blue eyed.
This is not thought
to have affected the data, since no eye-color differences had been
seen or reported before.
A solution has been worked out for future
KC-135, laboratory and Spacelab OCR data collection on brown eyed
subjects by placing an extension tube out past the ring flash and
thus limiting the amount of light available for reflection off the
inner surface.
Subjectively, it has little or no effect on vection.
In addition to the above subjects, six unpaid, blue eyed subjects
were obtained for further laboratory testing and OCR measurements.
They were Charles Oman, Cammy Pane, Robert Renshaw Jr., Patricia Rich,
Tom Stephens, and myself.
Their ages ranged from 15 to 34, 4 male,
2 female, of which 4 were naive.
The methods and apparatus were iden-
tical to those used for the astronauts, and as much as possible, the
methods and instructions conformed to those to be used onboard Spacelab.
Additional subjects were used numerous times for various studies involved in this project and are discussed elsewhere in the thesis.
58
3.9
Drugs
Another factor clouding the KC1 and KC2 data is the use of antimotion sickness drugs,
Due to the unpleasant 'roller coaster' nature
of the KC-135, a priori 60% of all passengers get violently motion sick
to the point of vomiting.
this nausea.
ness durgs,
The rotating visual.field tends to heighten
To combat this, several subjects used anti-motion sickOn KC1, all
alomine and Dexidrene,
subjects took Scopdex - combination of ScopOn KC2, one subject took Scopdex, while another
wore a Scopalomine patch which allows slow diffusion of the drug through
the skin.
The exact affect of these drugs on the data is not known, as the
effects of the drugs vary from individual to i'dividual and from day
to day.
Miller and Graybiel (19681 reported the Scopalomine based
drugs had no effect on OCR.
A final anti-motion sickness drug has not
been chosen for flight on Spacelab yet, but when and if the decision
is made, a full baseline study will need to be made to determine how
each individual is affected.
59
CHAPTER 4
REPEATIBILITY AND ACCURACY
There are several reasons for which the results and conclusions
of this thesis could be questioned.
Because of the evolutionary style
of this research project, each step and method needs to be compared
to the previous methods within the same experiment.
There are five
major points or changes that could be questioned in terms of the accuracy and repeatlbility of the experiment,
They are;
(1)
45' vs 90'
signals in reporting vection; (2) monocular vs. binocular vision in
OCR recording; (31 varying patterns, lighting, and depth of dome;
(4) changes in scanners working on equivalent data; and (5) dilation
of the eyes in OCR measurements.
4.1
450 vs
Each will be discussed separately.
90* Signals
In a study done November 13, 1979, I compared signalling systems
under the dome in an effort to see if there was a major difference or
drawback to either a 450 or 90' measure.
four experienced in VIR, four naive.
Eight subjects were used,
Each subject was given two sets
of four runs in random order - 2 at 45*/sec, 1 at 30*/sec and 1 at
60*/sec.
On one set they were to signal their subjective position
relative every 450 relative to the room.
relative to the room,
In the other set, every 90*
The order of the two sets were interchanged
between subjects to eliminate bias.
No OCR data was collected.
60
The data was transferred from its original strip chart form to a
data sheet.
Average velocities and standard deviations were then
calculated for all four runs for each subject for each measurement
condition.
These are listed by subject's initials in Table 2.
As can
be seen in all cases, subjective measures are slower than actual dome
speed with either measurement system.
(The actual average for four
runs is 45*/sec.) The yes/no criterion on Table 2 indicates whether
In
the signals show a consistent relation to the actual dome speed.
other words, whether the 30*/sec estimate is slower than the 45*/sec
estimate, and whether the 45*/sec estimate is slower than the 60*/sec
one.
In nearly all cases, this relationship does exist, although the
increase is not the same for all subjects.
The comparison of standard
deviations, on the other hand, indicates that a steadier measurement
is made with the 45* measures.
And although two subjects indicated
that they have no ingrained personal preference for 450
as they do for
90*, it appears that this measure is easier at all but the highest
speed.
At 60 */sec, the measurements came so fast that it was thought
by at least three subjects that they locked onto an internal clock
which changed only as conditions or sensations noticeably changed.
It is also seen that subjective velocities do not change in a calculatable fashion for all subjects when a change is made from 90*
45* signals,
to
That is, approximately 50% reported faster vection
velocities with 90* signals, and approximately 50% reported slower
vection velocities.
The changes were on the order of ± 10-20% and
overall increase in subjective speed in 90'
different by t-test standards.
was 5,2%,
not statistically
Overall, the conclusion was reached
CO
LY
BW
Co
Average
velocity
450
Signals
BW
LY
21. 05*/sec f30.65*/sec 118.53*/sec
yes
Average
velocity
900
Signals
28.27*/sec
yes
Average
standard
deviation
900/450
yes
no
25. 50*/sec 127. 76*/sec
yes
yes
OB
BK
OB
BK
37.45*/sec
20.42 0 /sec
yes
yes
32.00/sec 133.22 0 /sec
yes
yes
BL
I-
BL
BR
-
33.22*/sec
yes
39.70 0 /sec
yes
BR
27.00 0 /sec
yes
33.65*/sec
yes
0.545/0.377 0.667/0.337J0.672/0.36210.430/0.28710.835/0.813 0.385/0.192 0.447/0.240
Percentage
change
in velocity
450 + 90*
+26%
-20%
+22%
-17%
-9.6%
-16.0
Table 2:
Average and standard deviation of velocity in 450 versus 90* measures
Comments:
Assumes 2 45*/sec runs, 1 30 0 /sec run,-, 1 60 0 /sec run; also velocity:
apparent; no = no velocity relation apparent.
+20%
yes = relation
0%
I-a
62
to continue testing with the 450 measure.
The change mid-stream in
the experiment had little or no effect on the data.
4.2
Monocular vs Binocular Vision in OCR Recording
Prior to the final round of astronaut testing in September 1979,
all OCR measurements were monocular.
cular.
Hence, all KC-135 data is mono-
The subject wore a patch over his right eye and centered his
left eye in the frame of the camera.
The bite board was one half size
and thus connected only to the teeth on the upper left half of the
mouth.
The fiduciary marks were presented only under the left eye
(see sketch, page
).
A Nikon PN-l extension tube was used
in
connection with the 105 mm lens to produce a reproduction ratio of
1:1.5 (2/3 actual size), in comparison to the present binocular reproduction ratio of 1:2.5 (2/5 actual size).
It was hoped that by chang-
ing from monocular to binocular data that we could have more available
light and thus gain an F-stop.
This, however, did not occur.
The
change moved the camera back and thus did give more focal range and
depth of field.
This aided in focusing, since it had been difficult
to get the fine features of the iris clearly in focus for analysis.
Monocular film developing was identical to the binocular case
cited before,
except for a sign convention change.
Film was being
numbered with felt markers on the front side of the film.
This, how-
ever, was changed because of the characteristics of the film coatings.
Felt tip markers are permanent only on the back side of the films,
63
it is easily smudged or rubbed off on the front side.
The reversal
of film in the scanner therefore caused a sign change in the convention used to determine angles.
Thus prior to binocular data, CW
rotation of the eye as seen from the subject's point of view dictates
a positive rotation of the eye when plotted.
The opposite is true
for present binocular methods.
In addition, the HSFA had not been modified to the present binocular setup,
It had a magnification factor of 20.
That is, film was
blown up 20 times and projected on the same 62.5 x 62,5 cm screen.
This led to iral diameters of 18 cm (as compared to present magnifications of 50 times and pupil diameters of about 23 cm for binocular
photos).
The iral diameter is the critical value for determining the
average standard deviation found in analysis.
The larger the iris,
the wider spread the landmarks and therefore the more accurately the
angle can be measured,
The change in iris diameter did not greatly
affect the accuracy of the measurement process, which depends more on
the carefulness of the scanner.
In addition, this 20% change in iris
diameter would only produce a standard deviation change that was well
within the noise of such a measure.
A change back to monocular data at this time would, however, increase our accuracy.
By blowing monocular data up 50 times, and thus
approximately doubling the iral diameter, errors and standard deviations should be cut in half.
and no focusing problems.
This is assuming best case conditions
64
The actual difference in measured OCR induced by the two conditions cannot be accurately determined since both techniques were
not imposed on the same subject under the same dome on the same day.
Static OCR values induced from a rotating GIF are known to have interand intra-subject variations, and thus a positive statement cannot be
made.
It was noted, however, that binocular OCR values are
slightly but significantly larger than those obtained with
monocular viewing, and that calculated standard deviations
are on the same order of 0.2 to 0.8 degrees.
4.3
Varying Patterns, Lighting and Dep-th of Dome
A study done in April- 1979 after the KC-135
flights,
determine the effect of various visual patterns on vection,
choose the best one for further vection studies.
sought to
and to
Several suggestions
were listed as possible causes for the poor vection created by the
existing dome.
Type of vision:
We had been testing with monocular vision,
Colors in the dome:
We had black on gray and blue on white wall
paper.
Fixation point:
We had just instructed the subjects to gaze into
the camera lens,
Amount of lighting:
The back-lighting was low and didn't lighten
the gray surface well.
65
The list goes on to include the shape of the dome, the percentage of
coverage of the dome surface, type of pattern, and depth of field.
Several wallpaper patterns were tried without formal testing
measures, only subjective evaluation.
Most of them were not convinc-
ing in producing vection, and they often gave directional cues.
I
then chose three subjects on whom to test several patterns and conditions to see if it was possible to statistically prove one pattern
or condition better than another.
Two of the subjects showed little
or no vection and were thus dropped from the study.
The third subject,
although prone to drop outs, was very helpful in pattern determination.
Nine variations in all were tried.
They were:
(1)
Gray background with 1/4" dots at 3% coverage,
(2)
Parallel black and white stripes on an insert.
(The annular insert
extends out from the camera flash - a visual angle of 13.5* out to the curve in the dome - a visual angle of 55*).
(3)
An offset radial pattern of black stripes on a yellow background as an insert.
(4)
A blank yellow insert to check if the vection was caused
solely by the peripheral pattern.
(5)
Four colors of 3/4" diameter dots on a gray background with
30% coverage on the front face, and 13% dot coverage on the
dome sides.
(6)
Six colors of 3/4" diameter dots on a white background with
20% coverage on all sides, but having no fixed center point
for gaze fixation.
66
(7)
Same pattern as (6) with the exception of now having a
fixed center.
(8)
Same pattern as (7) now with reduced lighting to cut down
on eye strain from the white background.
(9)
Same conditions as (8) except viewing monocularly instead
of binocularly to test for any difference between the two.
Several runs at different speeds in random order were taken on
each pattern with one subject
better than the others.
to try and statistically prove one
The subject was given the same instructions
as in normal data runs, measuring 90' rotations relative to the room.
The data were transferred from strip charts and averaged over all runs
for onset times, subjective velocities, times of drop outs, and their
standard deviations (Table 3).
Not enough data runs were taken to prove very many patterns statistically better than others.
Using a t-test of significance, it is
possible to statistically eliminate the blank insert (t = 6.91, p < 0.001,
d.f.
tion,
= 5),
showing that peripheral vision is not the only cause of vec-
This is in contrast to the work of Brandt et al. (1975), who
stated that masking the surface to a visual angle of 60* had almost
no effect on vection.
In addition, the blank moving center, subtending
the 13,5* normally taken by the camera, can be eliminated as a viable
solution (t = 5.4, p < 0.001, d.f. = 5).
Beyond that, analysis of
variance doesn't show any one pattern to be better because of the small
sample size and the variances involved.
It was noted, however, that
parallel stripes gave directional cues, and that bright lighting on the
DOME TYPE
Viewing
type
Average
time of
onset of
vection
Standard
Average
Standard
deviation time of deviation
iof time
first
of drop
of onset
drop out out
Average
std.dev.i
of 900
signals
1/4" blacktdots
on gray back-
M
4.5
2.15
16.83
6.59
M
2.3
0.71
22.7
6.36
B
2.53
0.56
1 18.03
2.32
0.51
B
3.93
0.42
14.2
2.65
0.70
4 colors of
3/4" dots on
gray backgroundI
30% coverage
B
2.96
0.87
20.75
6.44
6 colors of
3/4" dots on
,2%co.
white,wi
20% covA
moving center
B
29
2.93
0.11.r
0.31
6.6
1.38
o
vection,
Same as above,
without moving
center
B
1.97
0.31
19.47
6.07
0.58
0.15
16.85
4.35
0.38
1.10
15.92
5.13
4.05
ground
30% coverage
Parallel
stripes, black
on white
0.51
'
.38*
Offset radial I
stripes, black
on yellow
Blank in ser t
yellow
for
Same pattern,
with reduced
B2.32
lighting
Same pattern
with reduced
M
2.42
lighting
Table 3:
Pattern and viewing differences compared.
B
M
=
=
binocular,
monocular
68
six color pattern with white background caused eyestrain from the
It can also be seen that binocular viewing is slightly
contrast.
better than monocular on all points, thus adding another reason to
remain with binocular OCR measures.
Overall, from this study and other separate subjective opinions,
it is felt that the 20% coverage with six colors of 3/4" dots on a
white background is the best pattern to induce vection.
Lighting must
be appropriate for the contrast involved; about 24 foot candles incandescent or 12 foot candles fluorescent in this condition.
The change
was made from fluorescent to incandescent to match the Spacelab lighting scheme.
duced.
The two light levels are comparable in the contrast pro-
Also, since the time of this study, the depth of field of the
dome has been increased by 6".
This has improved vection, mainly by
eliminating any objects visible or 'sensed' in the periphery.
Its
specific effect on vection was never carefully measured beyond a subjective point of view.
It can be shown that subjective measures of
velocity and drop out times are not statistically different in the
two dome depth conditions.
Onset times, however, are statistically
different, but the change in visual pattern must also be taken into
consideration in accounting for the difference.
Another problem arose from the change to random colored dots on
a white background that went unnoticed until after a great deal of
data was lost.
The high contrast pattern essential in creating satu-
rated vection also interfered with the OCR data,
It was found that
the flash intensity was high enough and was allowed to disperse
enough to cause specular reflection of the dot pattern onto the subject's
69
cornea.
This problem was restricted to brown eyed subjects where
the iral patterns were not well illuminated and thus the overriding
In-
visual scene was that of the reflected dot pattern (Figure 9).
creasing the light only increased the effect.
This was not the case
on blue or hazel eeyed subjects where the underlying iral patterns
overrode the dot pattern reflected on the cornea (Figures 10 and 11).
Several engineering solutions to the problem were attempted.
They involved background lighting changes, various coatings over the
dome surface to equalize the reflectivity, and flash condenser/restrictors.
By placing an extension tube out from the ring flash, it was
possible to eliminate all photographic flash light from reflecting
onto the cornea,
This extension tube, however, interfered with vection
sensations since it protruded 6" towards the subject's face.
A solu-
tion was to cut that length in half, allowing only light that had an
angle of incidence greater than that which could return to the subject's
eyes to impinge on the dome surface.
This tube, approximately 3" in
length and painted white to blend in with the dome background color,
was implemented for Spacelab experimentation on brown eyed subjects.
It does little to effect the flash intensity or vection quality.
How-
ever, in order to eliminate this from being another factor to contend
with in this investigation,
measures were blue eyed.
all subjects used in the lab for OCR
From previous data, no significant difference
was noted between brown and blue eyed subjects, as expected, and it
is therefore not a cause of concern.
The next round of astronaut
testing, however, should use the extension tube to get the needed OCR
data on brown eyed subjects and to match the Spacelab conditions as
closely as possible.
-
- - - ---------------
. ... ..
.................
-------
FIGURE 9. Brown Eyed Subject with
Reflected Dot Pattern
a
..
...
FIGURE 10.
Hazel Eyes under Same
Conditions as Fig. 9
.......
..........
73
4.4
Changes in Scanners
The volumes of data analyzed for the KC-135 and laboratory data
required the use of more than one scanner.
employed:
For the most part, two were
Yao Tsiagbe and Stefania Rubinsky - the latter doing the
greatest volume of work.
In order that position data not be lost be-
tween scanners, the last three data points of a previous scanner were
repeated in order to get a position correlation,
At the end of each
scanning session, sketches of the eyes were made to depict which landThis
marks were used.
allowed one scanner to return to the same
landmarks on a following session, as well as documenting the landmarks
for further comparisons with the plotted values as a final check.
In order to test whether both scanners gave comparable results,
apart from the accuracy check provided by the standard deviation values,
each was asked to repeat 20 frames of binocular data using landmarks
of their choosing.
By properly scaling the Varian OCR plots, it was
possible to see both scanner's values on the same plot, each having
their own reference angle to begin with (Figure 12).
view, these plots were separated and scaled up.
For a clearer
The angles found by
Yao have been placed on transparencies and overlaid across those found
by Stefania,
over left.
Figure 13 is right eye over right, Figure 14 is left eye
To compare the left eye with the right, Figure 15 is right
over left.
As can be seen, both scanners show comparable results and both
eyes are going through essentially the same rotations.
Also, by com-
paring the graphs and overlays, there is no discrepancy larger than
'AX/V)IS '.VERSION '1 TEST
5-DEC-79 116:38:15 1P1"OTR-'PLOT'1
MUX/MS
25
x
20'
x.x
xX
15
10!
x
x
xx xx
x
X
X
X
*-l
5
xxx
X
.X
X
0
(f)
P.
X
0
co
z
-5:
CL
XXXX
x
X
x x
X
x
X
-
175
180
-10
0
u
150
155
160
165
170
FRAME #
FIGURE 12.
Scanner Comparison Plotted on-Same Scale
.4
X
xx
X
XX
i
xx
Xx
x
x
x
.
x
X
- 4
.1.
I
,*...
a
SCANNER
-
RIGHT
I
4.
YAO
VAX-*yS 1YS /ERSION I TEST 18-APR-80 15:35:51 PICTR-PLOT3
35
I
*** VAX/VMS
-'SIAI:tP3441.ARROTTIVARIAN.PLT;3
I
I
I
x
x
x
I
0
H
C
30
x
z
x
25k
x
0
CO
H
05
x
x
x
x
xx
x
x
x
x
20
x
C'
x
x
x
x
x
x
<U
x
0
I
I ,
15
155
15 0
160
FRAME #
*
*
...
.. ~*'
.*1~*
I.
FIGURE 13.
165
I
170
SCANNER - STEFANIA
Increased Scale Overlay
Yao Right over Stefania Right
175
180
x
x
X
x
x
x
X.x
x
x
x
x
xx
.x
x
j
I
I
I
.
x
x
SCANNER -YAO
LEFT
AX/VMS *
VSION 1 TEST 18-APR-80 15:37:27 PICTR-PLOT4
5
*
.bral:[P3441.ARROTTIVARIAN..PLT;4
I
I
I
i
i
-/VAX/VKS
.0
X
L'
-J
xX
-5
x
x
CD
z
X
X
z
X
x
Xx
x
x
X
x
x
X
X
X
-10
x
X
x
0
U)
H
x
X
CL
0
R I
*150
I
I
155
160
FRAME #
FIGURE 14.
I
I
I
165
170
175
SCANNER
- STEFANIA
Yao Left over Stefania Left
160
'If
'A.
*,~,
~
':~
-
-
~.........-
I
I
X
x
x
x
xX
X
x
X
X X
XX
x
X
X
2<
X
J.x
V
YAC
SCANNER
LEFT
4
. 4
I
.,w
rAX/VXS *000 'VSION I TEST 18-APR-80 15:35:51 PICTR-PLOT3
35
*** VAX/VXS
_SIAI: IP3441.ARROTTIVARIAN.PLT;3
-
i
I
i
0
H
C
30
x
x
..
J
-j
z
x
25 k
00
0
X
x
z
0
X
x
x
xx
x
X
x
X
x
*
X
x
x
X
x
H
x
x
20
X
<U
$-
I
4=
155
150
160
FRAME #
FIGURE 15.
.9
I
I
165
170
SCANNER - STEFANIA
Binocular Comparison,
Yao 'Eeft over Stefania Right
.175
180
81
1 1/2 degrees,
which only occurs on two occasions,
under a degree.
and most are well
Even the larger differences cannot be proven to be
statistically different since each data point has a standard deviation
on the order of half a degree.
It is also noted in Figure 15, by over-
laying one eye on the other, that the two eyes have an equivalent fit.
That is, they both counterroll together with no asymmetry visible.
(The dome was run in two directions during these 20 photographs.) There
are no differences between -the two eyes in visually induced roll greater
than 1 1/2 degrees, and this is a limit seen only on a very few points.
Most are much closer.
Overall, the data collected indicates that the
method and scanners are not only accurate to within the standard deviations calculated,
they are repeatible to
within 1/2 degree or less
on the average.
4.5
Dilation of the Eyes in OCR Measurements
This problem is a result of the timeline and data collection
methods used.
It was necessary that the dome light intensity be kept
down around 10 - 20 foot candles to prevent eyestrain and provide
good vection.
The photography, on the other hand, requires flash
levels on the order of 1000 foot candles, or nearly two orders of
magnitude more.
It is not possible to take OCR measurements on a con-
tinuous basis as the flash would interrupt vection greatly.
Taken in
short bursts (2-3 sec), however, it can be tolerated without much
82
effect on vection.
The problem arises in that the flashes cause
pupil to constrict,
or rather the muscles of the iris
to shrink the size of the pupil.
to constrict
This effect was minimized in a
previous study by Miller and Graybiel (1970), who placed drops of
1% Pilocarpine Hydrochloride solution in the eye before taking OCR
measurements.
The drug minimizes the natural fluctuations in pupil
size as well as maintains the pupil in constant constriction to allow
viewing of as many iral landmarks as possible.
Since use of this
drug would not be tolerable for operational reasons on Spacelab,
was not used in this study.
it
The photographic flash occurs fast enough
to act as a continuous bright light and thus no dilation occurs between flashes.
The constriction process, however, lasts 6-9 flashes
(2-3 sec) before reaching steady state, depending on the individual.
This means that the iral
between each flash.
landmarks are moving on the eye during and
(Figures 10 and 11 (pp.
71-2)
were taken on the
same subject 20 seconds apart, Figure 10 occurring as the last frame
in a series of 9 consecutive,
3/sec flashes,
while Figure 11 is the
first in the next series.)
To minimize the effects of these non-torsional movements of the
landmarks, scanners were instructed to use landmarks spaces as far
apart radially as possible and as close to horizontal or at least
as symmetrically as possible.
It can be shown that the angle between
two points located asymmetrically about the eye may change with pupil
constriction, while the eye has not gone through any torsional rotations.
To qualitatively check the effect of these dilations, scanners
83
were instructed to choose several identifiable features on a given
set of monocular data shot under the dome while it was in motion.
Eighty points in all were entered into the HSFA.
were entered along the eyelids and around the iris
line the main features of the eye.
First 20 points
and pupil to out-
Next, ten points on the eye plus
the two fiduciary marks were each entered five times, relocating the
crosshair used to mark points between each entry.
This was repeated
over ten frames of film shot at three frames/sec in order to get
several levels of pupil constriction.
Anthony Arrott, interested in
the same data for his studies, wrote a program similar to SCANOR3
which plotted these eighty entries on the same plot, scaled in the
same units as the HSFA.
The plot is similar to that seen on the
screen of the HSFA reduced in size by a factor of approximately four
(Figure 16).
The eye has been sketched in for clarity.
The two lower
points not on the eye are five entries of the fiduciary marks.
iations in these entries are negligible.
on the iris
Var-
The points that were repeated
and on the blood vessels usually appear as blurred crosses,
a result of slight errors in entering the point in five repeats.
An attempt to measure the angles between any two landmarks on a
drafting table, accurate to about 1/2 degree, resulted in a maximum
change of two degrees.
However, this includes angles chosen between
landmarks on the iris and visible blood vessels.
It is clear by over-
lays of the data that at least oneof these blood vessels,
the far right, is conjunctival.
the one on
These blood vessels, indistinguishable
from scleral vessels, do not move with the eye, but slide over it.
Blood vessels are not valid or wise choices for OCR measures.
The
.
a
AX/VMS
VAX/VMS
VERSION 1 TEST 17-FEB-80 20:04:19 PICTR-PLOT7
88E3
(82
80
78
/0
76
74E3
76
E3
78
80
82
84
86
88
90
Multiple Landmark Data ML80NIS Frame 9
FIGURE 16.
80 Point Dilation Study, small pupil overlay
92
84
E3
85
other cause for large errors was in choosing angles that were made
by points near the pupil.
Figure 16,
As can be seen in comparing the overlay in
the point nearest the pupil moved considerably,
while the
rest of the points remained fairly stable.
In addition to this data, plots of all eyes show no general
rotation or trend in the first three frames of a data run.
These
frames, taken with no dome rotation, show that while there is some
movement of the eye, it cannot be attributed to dilation.
The move-
ments seen are on the order of 1* in random directions and can be
attributed to the noise in the positioning system of the eye seen by
Miller (1962).
The overall indication of this study is that as long
as points are chosen symmetrically and as far radially as possible,
good OCR data can be obtained with confidence that it
is little
affected
by the constriction or dilation of the pupil.
In summary, although it is possible that each of the changes or
problems induced slight errors into the analysis of the data gathered,
it
is the author's view that they are negligible.
The signalling
method of one button push every 45* was not significantly different
than that using 90* and it should substantiate itself as more data is
gathered.
Binocular OCR recording has shown comparable accuracies to
monocular, and it has been shown that both eyes are driven in identical
directions to similar magnitudes by a singular binocular process.
This
would allow a return to monocular recording if higher accuracies are
desired with a theoretical improvement of 50%.
The random dot pattern
86
with 20% coverage is clearly the best in creating a vection illusion
without giving specific reference for influencing position and velocity information.
Peripheral vision was also elminated as the sole
cause of vection with a near doubling of onset time and a 50% decrease
in steadiness seen when 55* of the central field was masked.
Scanner
were shown to do accurate work (a = 0.2 - 0.8) that was repeatible
over a given set of binocular data, giving credence to both the system
and the eye movements measured throughout this thesis.
And lastly,
although not a minor problem, dilation effects can be minimized through
the choice of proper iral
landmarks.
87
CHAPTER 5
RESULTS
The results of this thesis are divided into two sections.
first is an analysis of the vection phenomenon.
The
It contains lumped
averages over all subjects for vection speed, onset times, and drop
outs, all presented in graphic form.
ances and differences dictate.
Qualifications are made as vari-
KC-135 flight data and tactile dif-
ferences are compared to standard laboratory conditions.
In addition,
individual averages are listed for each of the Spacelab crew members
as this will be important for comparison with data returned from
Spacelab.
The second section contains the OCR data and analysis,
including both monocular and binocular results.
Averages of OCR values
obtained in this research only tended to disguise the substantial differences seen within individuals.
The OCR seen is clearly not as pre-
dicted in all cases, nor does it always match the results obtained by
previous authors.
The individual plots of eye position are thus in-
cluded in Appendix D for comparison.
Eye to eye comparisons are made
for the binocular results, noting any asymmetries or preferential directions.
Comparisons are made between the eye movements and induced
vection, between monocular and binocular results and between 1 g and
zero g results.
The 1 g monocular data is presented first, followed
by the KC-135 monocular data and 1 g binocular results.
88
5.1
Vection Results
The following is a summary of the vection results for all subjects,
independent of the OCR information obtained.
over both testing sessions:
The crew data is averaged
February and September, 1979, for drop out
times and vection velocities since there was no significant difference
noted between the two (Figure 17).
Onset of CV times, however, did show
a significant difference between the two sessions.
There are several
possible reasons for the signifant (p < :0.02, t = 2.33, d.f. = 15) decrease in onset times at all speeds with the present pattern.
The
present pattern is more compelling; multi-colored 3/4" dots at 20%
coverage on a white background in comparison to the 3% coverage of
1/4" black dots on a gray background.
The present viewing is binocular,
as opposed to monocular on the gray pattern, and finally, the depth of
the dome has been increased (from 8" to 14").
A combination of the more
compelling pattern and binocular viewing are considered to be the major
reason for this decrease.
In the comparisons with zero g and tactile
conditions, the data for onset times will use the present pattern only,
since it is the pattern on which future Spacelab-1 testing will be done.
Any detrimental effects of lumping the averages together for drop out
times and vection velocities are considered minimal, as the larger data
base is helpful in determining significant differences.
The data for the six laboratory subjects tested is in complete
agreement with that collected for the crew on the present pattern.
None of the results can be proven to be statistically different and
89
15-
I
12--
C)
4-
Previous
1/4" Dots
3% Cover
Monocular
'N
N
T
9-
0
1
I
______
-4
I
I
4-4
Present
3/4" Dots
20% Cover
Binocular
L
I
45
60
31
1 Incae
OnSt.ev
rIndicates One Std. Dev.
0
15
30
deg./sec.
Dome Velocity
FIGURE 17.
Comparison of Onset Times for 2 Patterns
90
overall averages are surprisingly similar, which attests to the repeatibility of the experiments.
These averages were lumped together with
the crew data for overall averages of onset times, drop out times, and
vection velocities.
Tactile cues were not tested on the six lab subjects
since it was felt that enough data had already been gathered on this,
and thus averages presented are calculated from the crew data alone.
The total number of data runs under all conditions combined is:
130
non-tactile runs and 66 tactile on a total of 14 subjects.
Vection data for the KC1 and KC2 are lumped
together.
The total
number of subjects on which data was recovered is limited to 9 with a
total of 93 data runs.
Figures 18 through 20 present the results in graphic form while
Table 4 lists the numerical averages and standard deviations for the
data.
Vertical lines on the figures represent one standard deviation
of the data collected.
Data points on various conditions have been
shifted slightly for clarity in discerning standard deviation values.
Intra-subject variances are much smaller than those found in the combined averages presented.
This is in agreement with the findings of
Dichgans et al. (1972), Young et al. ((1974) and others who also found
intra-subject variability to be smaller than inter-subject variability.
Figure 18 presents the average time of onset of CV in four conditions for three speeds.
The conditions are:
1 g laboratory data for
CV about the vertical in a supine position, same conditions with tactile
pressure applied to the soles of the feet, zero g data collected on the
KC-135 flights with the right ear down, and fourth, 2 g data with the
right ear down.
This last position, a 2 g otolith signal, equivalent
91
A1
ig
Tactile -
18
15
12
2 g
C.,
g
1211
4-4
0
'4-4
.
-Zero
3T
0
15
30
45
60
Dome Velocity
FIGURE 18.
Time of Onset of CV in 4 Conditions1 g, 1 g Tactile, 2 g, & Zero g.
deg./sec.
92
to standing erect with the head rolled 90* to the right, is such that
it should not create continuous vection without also creating an otolith
conflict (Young et al., 1974).
It is believed, however, that the sinu-
soidally changing gravity conditions created onboard the KC-135 overrode the already confused vestibular system.
Also, the head rolled 90*
to the side position minimizes the effectiveness of the otolith sensors
(Young et al.,
1975).
wild variations in
With the gravity vector being turned 'on and off',
perceived
orientation
by all in roll, pitch and yaw axes.
were
experienced
There was no 'clear' otolith cue
to create the paradox of 'rotation at a constant tilt', and thus signalling of rotation occurred in the two g environment as well as in
zero g.
As can be seen, and as expected, the onset times are shorter in
zero g than in 1 g at all but the highest velocity.
This is significant
at 30*/sec (p < 0.03, t = 2.2, d.f. = 9) and at 45*/sec (p < 0.04, t
1.98, d.f. = 23) by the standard t test.
=
It is noted that the onset
time in zero g stays constant over all speeds, even down to 15*/sec.
In comparison, Young et al. (1974) showed that there is a marked increase in yaw vection onset times at slower velocities (10 to 30*/sec)
and the same is seen for the 1 g supine data presented here.
Brandt
et al. (1973), on the other hand report no change in yaw CV onset times
which are on the order of 3-4 seconds for field speeds of 10 to 120*/sec,
similar to those seen in zero g.
The sensitivity and orientation of
the utricular otolith can be partly responsible for the shorter onset
times in zero g.
In a 1 g supine orientation, although the otolith is
in its least sensitive orientation, it transmits a valid signal
93
nonetheless.
As the dome speed increases and the visual stimulus
becomes more compelling, less emphasis is placed on the otolith interpretation of position, and vection occurs sooner, reaching a peak around
4.5 seconds.
In contrast, in zero g, the otolith signal is rendered
totally useless as a static orientation cue, and the time to onset is
dependent only on the believability of the visual cue and the time constants of the SCC and CNS.
This threhsold time, the time for the SCC
cues to reduce to a level where the visual motion can be accepted as
body rotation, is approximately 4.25 seconds over the velocity range
15 to 60*/sec.
The tactile cues are seen to cause a delay in time of onset of
CV in a 1 g environment.
(Not enough data was collected on 2 g or zero
g tactile cues to present any quantifiable average.
however, follow those of the 1 g data.)
The tendencies,
The tactile cues can be shown
to be significantly different (p < 0.01, t = 2.6, d.f. = 15) from
standard 1 g supine for all but the lowest velocity, were the intersubject variance is too large to show significance.
The tactile cues
do not, however, represent the equivalent of a standing otolith cue,
since this would cause complete elimination of continuous vection.
Information can also be gained from the slope of the tactile
curve in relation to the slope of the normal 1 g curve.
As can be
seen, onset time decreases with increasing dome speed for 1 g supine,
leveling off slightly in the 45 to 60*/sec range.
On the other hand,
the tactile curve, as well as the 2 g curve, both tend to show an increase in time of onset of CV with increasing dome speed.
is thought to be caused by increasing conflict.
This increase
As the vection stimulus
94
quality increases, more of a conflict is generated between the visual
and vestibular systems, and as a result onset time for CV lengthens.
This is not the case for zero g or 1 g supine where no otolith or tactile cue conflicts with the perceived motion.
Thus, tactile cues or
increased gravitational cues do tend to limit vection.
The tactile
cues, however, do not represent a full replacement of gravitational
cues gathered by the body, presumably by the utricular otoliths.
Figure 19 plots vection velocities for three separate conditions:
1 g supine, 1 g supine with tactile pressure, and zero g.
The results
indicate that all three conditions are essentially identical with respect to subjective vection velocity.
The 2 g condition was not tabu-
lated independently as no difference was seen in vection velocities
over transition conditions on the KC-135 (i.e., in going from 2 g to
lg while experiencing continuous vection, velocities did not show any
significant difference).
In addition, calculating the velocity in a
'conflict' condition seemed of questionable value given the circumstances
under which the data was collected.
The results also show perceived vection velocities to be lower
than the actual dome speed.
understood.
The explanation for this is not totally
One thought is that it is a form of information loss or
equivocation.
Information is collected by the visual system at the
given dome speed and is collected, transferred, sorted and fed back out
at a slower speed due to losses along the way.
This, however, does not
offer any physiological insight into the question.
Another possibility
is that the CNS senses self motion through whatever method, begins signalling an apparent velocity which tends to lock onto an internal clock.
95
60
Perfect
Measure
0I
4 5
T
Zero g
Gj
g
/4
Tactile
15
0
15
30
Actual
FIGURE 19.
45
60
deg./sec.
Dome Velocity
Perceived vs Actual Dome Speed in
3 Conditions - 1 g, 1 g Tactile, Zero g.
96
The rates transmitted , although correlated to the actual dome speed,
do not have to exactly match those occurring - there is no feedback
or penalty - and thus the estimates remain slow.
(To match 60*/sec
requires a button push every 0.75 seconds with the present system.)
In comparing the difference in velocities over all speeds, an
interesting point crops up that appears to be in agreement with a
finding of Diener et al.
(1976).
Diener used a subjective scale to
He found that by doubling the spatial fre-
report CV in the yaw axis.
quency of visual stripes - similar to doubling the dome speed -
subjects
reported an average subjective velocity increase of approximately 60%.
In this investigation, doubling the stimulus velocity from 30 to 60*/sec
results in an average 58% increase in perceived velocity.
In addition,
the perceived velocities are an average 62% slower than the actual dome
speed in all
conditions.
Reasoning for this finding has not been
offered by Diener or this author.
Figure 20 presents the average length of the first vection period
defined as the time from start of vection to the point where it
ceases,
for two conditions.
The first
first
is the supine 1 g conditionand
the second is the same using tactile cues applied to the soles of the
feet.
It was not possible to collect the same information during the
parabolic flights because of the short duration of zero g.
It was
noted, however, that on nearly every occasion, as the plane entered a
2 g pullout from zero g,
vection ceased.
Again,
subject positioning
with the right ear down can account for this observation.
97
50
40
0'
g
0
30
-
0
ig
20
TactileT
10
_________
0
--
15
-
30
-F U
-
45
--
60
deg./sec.
Dome Velocity
FIGURE 20.
Average Time of Vection in 2 Conditions
98
15
12.34
Time of
onset
1 g,
old
60
45
30
I
9.85
a = 5.05
0= 8.4
dp = 18
dp = 19
7 78
dp = 5.6
dp = 60
a = 2.8
dp = 64
*/sec.
9.4
0 = 11.26
dp = 18
pattern
Time of
onset
1g, new
pattern
11.76
Time of
onset
1 g
tactile
a = 9.2
dp = 16
4.28
Time of
onset
zero g
a = 2.47
dP = 7
4.21
a = 1.76
dp = 10
Time of
onset
4.48
a = 2.26
5.4
dp = 60
19.5
13.3
a = 14..2
dp = 18
4.59
a = 2.71
dp = 24
>8.37
a = 4.45
22.3
Subjective
velocity
lg
Subjective
velocity
1 g
tactile
Subjective
16.2
velocity
0 g
a - 7.4
dp = 6
Length of
first
Lenth first
vection
1 g tactile
dp = 8
>13.09
a = 10.3
27.1
a = 11.6
34.0
a = 15.3
a = 8.7
dp =60
dp = 64
dp = 60
20.4
a = 7.1
dp = 42
25.5
a = 12.7
dp = 44
35.7
cy = 17.9
dp = 42
24.1
32.7
38.93
a = 4.9
dp = 8
a = 9.2
dp = 42
a=14.9
dp = 11
31.3
a = 11
1 34.5
a = 12.8
35.2
a = 12.0
dp = 60
vection
period lg
4.24
a = 2.25
dp = 7
dp = 26
2 g
a = 19.6
dp = 16
28.8
a = 9.97
dp = 16
dp = 64
dp = 60
23.4
a
15.2
dp =18
=
12.0
a = 20.1
dp = 16
a = standard deviations
dp = number of data points
Table 4:
Compiled averages and standard deviations as plotted in
Figures 17 through 20
99
It can be seen from Figure 19 that tactile cues shorten the
length of sustained vection, especially at the higher speeds.
Due to
intersubject variability, this cannot be verified at 30*/sec, but it
can be shown to be a significant difference at higher speeds (p < 0.2,
t = 2.2, d.f. = 15).
A reason for this decrease at higher speeds can
be seen again in the conflict model.
As more directional cues are
provided by tactile force, the conflict increases between the visual
and non-visual systems and thus vection is limited.
In addition, an attempt was made to see if a correlation existed
between either subjective velocity or latency times and age or sex.
The results indicate that no such correlation exists.
That is, onset
times and subjective velocities are independent of age and sex of the
subject over a range from 15 to 48 years of age.
Overall, the findings were as predicted in all except one case.
Onset of vection was quicker in zero g and slowed with tactile cues
and in 2 g.
Tactile cues do not fully replace otolith cues for "sense
of down", but can be shown to effect both onset and drop out time in a
manner detrimental to vection.
The fact that vection velocities do
not increase in zero g is quizzical.
Information transfer or an in-
ternal clock, either running at 60% of the stimulus velocity, are suggested reasoning that would not be affected by gravity or tactile cues.
The hypothesis that vection would be more compelling in zero g was
substantiated in voice comments made during 'free float' viewing of
the dome.
Comments by all, indicated that they feld immediate saturated
100
vection in zero g, during free float especially, and that it often
caused them to lose total orientation.
In addition, subjects invol-
untarily exerted reactionary forces on the litter and rails so as to
physically rotate the body in a direction opposite to the dome rotation.
For comparison with later data, averages for each crew member
were compiled for time of onset, subjective velocity and drop out
times, and are presented in Table 5.
Values were taken from the pre-
sent pattern and viewing conditions only.
1--)
_____________________
i
'1
ii
OG
Time
of
onset
of
CV
300
8.7
I
wo
CN
10.5
-4.9
6.9
.
9.3
6.7
I
RP
2.4
12.3
5.0
3.8
I
UM
2.9
6.1
5.3
--
I
BL
ML
4.7
6.3
0.71.95
-~8.3
450
3.5
1 g/l g
tactile
I
(
4.8
60
I
3 8V
6.3
2.0
7
2.9
3.1
6.2
3.2
Subjec tive
300
Velocity
18.0
13.1
1 g
450
22.9
20.0
tactile 600
30.3
30'
2.3
6.1
6.7
8. 8
12.6 1
8.3
9.5
37.5
18 .-
15.1
33.0
18.1
2-.
28.8
27.2
15.3
50.9
20.7
25.6
15.7
34.7-
25.2
67.8
29.1
27.7
50
40.1
50
32.4
31.8
44.1
23.5
450
50
42.9
50
38.2
44.0
50
16.8
drop out*
609
50
40.1
50
42.5
34.8
50
18.1
.
I
7.2
19.3
2 .
- 34.4
'-I
0
lg
Averagetime
of
first
* No drop out - 50
Table 5.
Individual averages for astronauts
-
time of onset, subjective, velocity, drop out times
102
5.2
OCR Results
The results for monocular and binocular viewing are varied enough
to warrant separate discussions of each condition.
results followed by the binocular.
First the monocular
KC-135 results are included at
the end of the monocular discussion as they too are all monocular.
The plots of monocular OCR values are in Section 1 of Appendix D.
The arrows in the lower right hand corner of each plot show the direction of dome rotation as defined by the scanning convention.
The ver-
tical line represents a span of time indicated by the values written
on the lower axis.
Frames are taken at a rate of three per second from
that initial time.
The first six shots were taken immediately after
startup of the stimulus, the second six when the subject was reporting
vection.
On occasion, this was not possible and the second set came
during 'no vection'.
The condition is clearly indicated by the words
'no vection' or 'during vection'.
There were no photographs taken with
the dome stopped.
5.2.1
Monocular Results
There are essentially two different types of eye movements noted
in the 1 g monocular data.
OG and BL.
The first was experienced by two subjects,
This result is similar to the findings of Finke and Held,
(1978), but more dramatic in the case of OG.
ments was as follows:
The pattern of eye move-
The eye immediately follows the dome rotation
with an OCR of 2-3 degrees.
Then after a latency, the eye appears to
counterroll back past its nominal steady state position and roll 4-6
103
degrees in a direction opposite to the dome rotation.
taken at this time were always during vection,
and it
Photographs
is not known
if this same counterrolling occurs in a 'no vection' situation.
appears so, since BL had similar torsional eye movements.
It
His eye
would follow the dome, and then counterroll, to a lesser extent, back
in a directionopposite the dome.
This time, however, a set of photo-
graphs included a 'no vection' condition which show this same apparent
counterrotation.
This would indicate that the OCR was not connected
with the vection sensation, but more with the length of exposure to
the stimulus.
In addition, it is noted that all these eye movements appear
extremely steady.
Although there may be large differences between
the values at 'no vection' and 'during vection' conditions, the eye
remains steady during the two seconds of photography.
cially true for the data on BL.
This is espe-
This will be contrasted with the bi-
nocular data later.
It is also seen that there is no correlation between dome speed,
tactile cues,
and amount of induced OCR.
This again would indicate
that the OCR process is independent of vection as vection is greatly
influenced by these two factors.
If the processes were dependent, OCR
should also be limited by tactile cues and increased with increasing
dome speed.
These differences are not apparent.
The second type of OCR noted involves purely a motion following
the dome.
For three subjects,
MIL,
UM and CN,
the eye begins to follow
the dome immediately after it is turned on, and is increased in the
104
second set of shots.,.
At first glance, this would indicate more
OCR during vection and that the eye was controlled by this perceived
motion.
It is noted, however, that several times when vection was not
present, the eye has rolled through the same angle in the same direction
as the dome.
The three subjects in whih this motion occurs show similar
amounts of OCR, although it is not identical in all cases.
is no correlation between amount of OCR and vection.
Again, there
Nor is there a
correlation with tactile cues or dome speed.
Visual pattern is another factor which cannot be totally responsible for the differences noted between monocular and binocular viewing,
nor can it
be the sole factor in determining the amount of induced OCR.
CN was exposed to two patterns, one immediately after the other, under
the same instructions and conditions.
One pattern was the usual 3 %
coverage of black on gray, while the other was a parallel stripe insert.
This insert was noted in Section 4.3 to have stronger vection producing
properties than the gray pattern and produce vection similar to the
present 3/4" random pattern.
The OCR induced by the two patterns is
nearly identical and again is unaffected by dome speed or tactile
forces, indicating a separate central determinant.
(The plots are
included in Appendix D and are labelled S for stripes and D for random
dots.)
Total amount of OCR induced by each run averages 4.0 degrees with
a standard deviation of 2.5 degrees.
(This is the absolute value of
induced OCR and thus not direction dependent, as such averages would
give smaller values due to the opposing types of movements seen in
105
different individuals.)
The intersubject variation is large; ML
showed average induced OCR of 20, while OG showed an average of 70
with differences as large as 100 between sets of photographs.
Similar
differences between the two subjects were not noted in vection quality,
onset times, drop out times, or subjective velocity, once again indicating that the processes are independent.
No statement can be made about the noise in the steady state
positioning of the eye since no photographs were taken while the dome
was stopped.
The binocular and zero g data, however, include photo-
graphs of steady state eye position and thus this will be discussed
in those sections.
The sampling theorem dictates that no positive
statement can be made about torsional velocity due to the slow sampling
rate.
It is noted that the eye often appears to travel in the direction
of the dome for the last subjects, but it does so at an apparent rate
much slower than the rate of the dome.
The eye will follow at a rate
of approximately 3*/sec and then jump back to follow it again.
The
limits of the ocular muscles have not been reached, as the distances
traveled are much less than those seen by Miller in altering the GIF
or seen in these same subjects on zero g to 2 g pullouts in the KC-135.
Logically, however, it seems that the eye would not want to reach these
limits, but would prefer to stay in the generally optimum central region
of movement in the orbit.
This can account for the smaller dynamic
torsional nystagmus values seen in this investigation over static OCR
obtained in centrifuges, slow body rolls or zero g to 2 g pullouts,
where gravity forces the counterrolling motion of the eyes.
106
5.2.2
KC-135 Results
The plots for the KC-135 zero g data also contain much additional
information.
The plots are in Section 2 of Appendix D, and are labeled
by an ID number which corresponds to the parabola on which the data
were gathered.
Subject's names have been added for convenience.
Data
points which do not involve the dome operation, usually photographs
taken during zero g to 2 g pullouts, have been double crossed to form
a star image.
Again, the arrow in the -lower right corner of each plot
indicates the dome direction during the photography.
There is a limited
amount of OCR data from the KC due to the acceleration problems already
mentioned.
Data exists for three subjects on 25 parabolas of dome
operation.
The results for OCR on the KC-135 are similar to those for 1 g
monocular data for all involved.
The average induced OCR is 3.9* with
a = 1.70, not significantly different from the 4* obtained in 1 g.
In
addition, each subject showed generally the same amount of OCR in zero
g as in 1 g, and in the same direction.
That is, OG again appears to
track the dome in its direction, and then counterroll in a direction
opposite to the dome.
the 1 g lab data.
The result is not as steady nor as marked as in
In fact, two parabolas show a tracking type motion
continually in the same direction as the dome.
This implies that the
various eye movements seen are not universal even in a single subject.
OG reported that the vection onboard the KC-135 was much more compelling
than in the 1 g supine position.
(He claims to have never been fully
convinced by the illusion until the zero g periods.)
This difference,
107
however, was not reflected in the eye movements, which did not substantially change between the two conditions, again indicating separate
processes for the two phenomena.
The results seen for CN are similar to the 1 g data.
His eye
tracks the dome rotation and tends to roll more as time goes on.
does not depend on whether vection is present or not,
their separate processes.
This
thus indicating
Steady state eye position, that is with no
dome rotation, showed the same variability as in the 1 g environment.
That is, 1 to 2 degrees of eye torsion was seen in the pre-dome shots,
and the eye did not return to the same rest position after each parabola
or run.
The noise involved in the eye positioning system does not appear
to be affected by the loss of gravity information, at least not dynamically.
The zero g to 2 g pullouts as well as previous work by Miller
and others show static OCR to be dominated by the otolith organ.
5.2.3
Binocular Results
The binocular results are plotted in Section 3 of Appendix D.
Each page contains the plot for one data run, right eye on top of the
left.
Again, arrows in the lower right corner indicate the direction
of dome rotation.
monocular data.)
of 25 seconds.
(The sign convention is opposite to that of the
The vertical lines on each plot indicate the passage
The first three OCR values are, in general, those
photographs taken before dome operation.
two seconds of dome operation.
The next six are the first
The first vertical line indicates the
108
passage of 26 seconds when the next six photographs are taken.
The
final six photographs are taken at the end of the 50 second run, with
The 'NV'
the final three occurring after the dome has been turned off.
and 'DV' indicate 'no vection' and 'during vection', respectively.
Erroneous or extra data points are cross hatched to form a star image.
Data exists on six subjects for 40 data runs.
All plots show good correlation between the two eyes.
both eyes appear to rotate in sychnrony.
That is,
This is in agreement with
Hering's Law of Equal Innervation which states "Innervation to the
extrinsic muscles of one eye is equal to the other eye, resulting in
movements of the two eyes that are equal and symmetrical or parallel."
(Dictionary of Visual Science, 1968).
There are cases, however, of
differences on the order of two degrees, and occasionally more.
This
can be attributed in part to the accuracy of the measuring system, but
must also be caused in part by the inaccuracy of the positioning system
of the eye.
binocularly.
The 1-2* of noise is not necessarily generated purely
The noise does not affect both eyes equally in the same
direction, nor does it have any apparent asymmetries.
The major difference between binocular and monocular viewing is
in the amount of OCR seen.
The average amount of OCR induced in bino-
cular vision is 6.50, a = 1.90, which is significantly larger (p < 0.01,
t = 4.6, d.f. = 24) than the
40
seen in the monocular data.
This, as
stated before, cannot be attributed solely to the pattern and must be
a result of binocular vision.
The visual system is receiving nearly
twice as much information and therefore reacts with a correspondingly
109
larger OCR.
Vection was also improved with binocular vision, but this
does not necessarily indicate a relation between OCR and CV.
The con-
trary is pointed out when looking at induced OCR with and without vection.
Overall, there is no significant difference between either the
average counterrolled angle nor the direction of rotation of counterrolling during vection and with no vection.
In binocular vision, the eyes again immediately follow the dome
rotation, and later perform rotations opposite to the dome direction.
The eye, however, does not remain as steady as in the monocular case.
Binocularly, the eye continues to slow phase roll in the direction of
the dome and appears to go through saccadic jumps to reposition the
eye within the orbit.
These nystagmus type rolls and jumps occur on
both sides of the median steady state eye position.
However, it appears
that most of the cases involve eye movements that have started with the
eye rotated opposite the direction of dome rotation.
This is similar
to the results noted in yaw vection where the eye performs nystagmus
eye movements about a line off center and in the direction of the oncoming field.
An evolutionary explanation would suggest that this
would be desired for survival; the eye moves to fixate the object
entering the visual periphery as soon as is physically possible.
Simi-
larly in VIR, the eye rolls to catch the visual pattern as early as
possible and the eye is then capable of stabilizing the image on the
retina and following it as long as possible.
This would be useful in
recognition and identification of predators from any position.
Here,
however, the eye seldom follows the pattern to full extension due to
its high angular velocity, random pattern, and low threat.
110
The questions may be asked, "Why the difference between monocular
and binocular data?
Why is the eye more steady in monocular viewing?
Why are tracking motions much slower than dome velocity?
Why the mag-
nitude differences in OCR values obtained?" All of these questions and
more cannot be fully answered until more data is taken and more eye
High frequency components of the data are essen-
movements monitored.
tial in explaining the tracking motions observed.
A sampling rate of
3 per second is not nearly adequate in describing the phenomenon.
The findings of this study can explain those of Finke and Held
(1978) who used an even slower sample of once per run.
indicated more torsion in State 1 (no vection).
Their findings
This would be commen-
surate with sampling the phenomenon as the eye is performing its initial roll in the direction of dome rotation, and sampling again during
vection along the eye's path as it crosses back and forth across the
zero eye position.
This one time sample and averaging only disguised
the actual motion occurring.
Similarly, averaging eye position over
vection and no vection here tends to show a steady deviation in the
direction of the dome rotation, being greatest in the no vection state
since this is usually the time early in a data run when the eye initially
follows dome rotation.
Periods of no vection later in the data run do
not follow this same pattern of eye movements pointing out that it is
not the NV condition, but rather the initial dome conditions .
The
occurrence of tracking movements across the eye-at-rest position averages
out to show little OCR during vection.
plots, however, this is not the case.
As can be seen from the binocular
The eye movements are identical
under both conditions and do not depend on the perception of self motion.
111
CHAPTER 6
CONCLUSIONS
Although previous research projects on VIR are limited, there are
several results brought out in this study that differ from earlier ones.
To begin with, the work of Brandt et al. (1973) on yaw CV was not in
agreement with the findings on latency of onset.
decreases with increasing stimulus velocities.
(1973) found that
In this study, latency
Whereas Brandt et al.
latencies are independent of stimulus velocity, Young
et al. (1974) found latencies to decrease with increasing stimulus velocity in yaw CV.
this study.
The values obtained were similar to those found in
The comparison is made in that both illusions involve motion
about the vertical, yet each stimulates a different set of semicircular
canals.
Brandt et al. (1973) found that masking the central field up to
60* has no effect on vection, a statement which was not supported by
this study.
A marked decrease in vection quality and an increase in
vection onset time were noted when 55* of the central visual field were
masked, thus indicating that the periphery is not the sole contributor
to the vection illusion.
Vection was shown to be limited by additional g forces and by
the presence of tactile cues indicating the 'down' direction.
The
tactile cues were not a full replacement for the gravity vector, as
this would have caused a complete elimination of the continuous vection
sensation.
The proprioceptive information
is used nonetheless as
112
additional information in subjective position determination.
Latency
to onset of vection was decreased substantially in zero g at all
but the highest stimulus velocity.
It also remained independent of
dome speed, indicating that otolith cues are totally ignored and that
time to onset becomes purely a function of the SCC threshold times, the
time it
takes for the visual information to override the competing SCC
cue, which appears to be about 4.25 seconds.
This.is not the case in
1 g supine conditions where the otoliths still transmit useful orientation information which must be taken into account by the CNS at all but
the highest stimulus velocities tested.
The gain of this otolith cue,
however, is low enough to be essentially ignored at the highest velocity
where the visual stimulus is so overwhelming, the canal threshold time
is the major limiting factor.
Average onset times of less than 4 seconds
are seen in some individuals, indicating that they possess a higher gain
in the visual system which overrides the canal signal earlier.
Vection velocities were shown to be independent of competing
gravitational and tactile cues.
Velocities were constant over all con-
ditions indicating a process that is independent of the otoliths.
Vec-
tion velocities are consistently lower than stimulus velocities, but
are in agreement with Diener et al. (1976) and others who reported that
they increase linearly with increasing stimulus velocity.
The perceived
velocities show a 58% increase when doubling the stimulus velocity, a
finding similar to that of Diener et al. (1976) in yaw CV.
for this 60% increase has not been put forth.
A reason
An internal clock which
is updated only on changing conditions could be responsible for the
invariance of velocity over changing otolith and tactile cues.
The
113
rapidity of signal required or a form of information loss in receiving
the visual information seem plausible explanations for the slowness of
velocities.
No direct correlation between vection and OCR could be found.
Eye movements varied from individual to individual and between monocular
and binocular viewing.
In general, binocular viewing produced the
greatest amount of OCR and the strongest sensations of CV.
This does
not indicate a direct correlation, since the amount of induced OCR was
similar in both vection and no vection conditions.
The direction of initial eye rotation is clearly the same as the
moving pattern.
That is, a clockwise rotation of the field produces an
initial clockwise rotation of the eye.
This would be the same eye move-
ment induced by rolling about the line of sight if
standing erect.
the subject were
Once the CNS realizes that this visual input cannot
be the same visual cue as falling with respect to the vertical, since
more than a 90* rotation should begin to produce a negative gravity
condition,
the eye subsequently counterrolls to be able to view the
oncoming visual field and track it in the direction of rotation.
This
rotary nystagmus does not always occur at the leading limit of eye
position.
Tracking motions and saccades are seen on both sides of the
median eye-at-rest orientation.
This differs from individual to indi-
vidual and between binocular and monocular viewing, but appears constant
over varying gravity conditions.
Thus these dynamic eye movements
cannot be mediated solely by otolith input and must be driven by the
rotating visual scene.
Survival evolution is offered as a cause for
114
these types of torsional eye movements.
Reasoning for why the eye seems to perform such slow rotations,
on the order of 3*/sec in the direction of field rotation, cannot be
offered until the high frequency component of OCR can be measured with
accuracy.
There are too many possibilities of underlying movements
which cannot be detected with the photographic method used in this
thesis.
This thesis lays the ground work for data to be collected in
the future
onboard Spacelab.
Without a comprehensive data base, the
data collected in zero g would have little value in evaluating the
effects of weightlessness on the vestibular system and how the CNS
goes about the sensory rearrangement that is hypothesized to occur
in zero g.
The data of interest will be the adaptive changes that
occur over the week in zero g and how these affect the onset of CV,
drop outs, and subjective velocity.
Although some differences and
similarities have been noted on the parabolic flights, the 24 second
parabolas leave no room to watch steady state zero g responses.
And
although there appears to be no differences in amounts of OCR in zero
g, the results of a week long stay should show a predominance of
influence placed upon the visual system.
Thus, as the CNS begins its
sensory rearrangement, visual and tactile cues will play increasingly
dominant roles in subjective orientation and motion perception.
115
6.1
Recommendations
The results gathered on vection appear to be satisfactory.
data will be provided by the forthcoming Spacelab mission.
More
Results
gathered on adaptation will be useful in sorting out the cause and
effect relationship between vection, and the visual-vestibular interaction.
The point that needs further refinement, however, is the method
of OCR measurement.
The system employed does not have the sampling rate
to measure slow phase velocities nor to see all the high frequency components of the induced OCR.
A continuous, highly accurate method of
OCR measurement that does not interrupt the vection illusion needs to
be implemented before the underlying system can be fully understood.
The present flash system cannot be used for more than 2-3 seconds at
a time without interrupting vection.
A continuous low light method
would eliminate the problems of vection interruption and the associated pupil dilations.
A comparison between zero g and 1 g data should
then provide the desired ocular adaptation information.
1
;.x / v
ARP CTT
;.BPCTT
i-AP
4-A
R-180
PINCCIti
RRR R
R
R
R B
AAA
A
A
A
A
A
A
RRRP
R R
R R
R
P
AAPAA
A
A
P,
EB
IIII''
IT
II
E3
EB
II
II
:0
'III"
111111
lrITIITT
vI
NN
Nq
WN
IN
NW
NW
N
00
00
NW
NW
NN
tPAO:
0
C
R0
0
B
T
T
T
CC
CC
00
00
cc
00
00
CC
IITII'
TI
II
II
CC
TI
TI
II
II
TI
TI
TII
CC
CC
CC
CC
CC
CO
Co
CC
C
00
ITIII
CCCCCCCC
4:CCCCCCC
00
00
SIA01:
Clr] PT CCtN.LIc;2
[OCR)PTNCCIN.LTS;2
YAX/Vy'S
VAX/VYS
(OCPBIFNCCIN.LIS;2
VAX/VMS
T
T
T
T
T
0 0CC00
CCC000
15:4R
15:48
TTTTT
T
T
PRRR
0
0
T'P
)
C
R R.t)
0
000
B
R
IN
N
NN
Wl
NNNN
NNN
II
IT
II
II
NNq
4 .R-1980
4 .R-1980
TTATT
PR
00
00
vI* NN
NJ
00
N
NflN 00
00
El
NNNP! 0C
00
II
BB ?B
A
A
1 :43
:".'):
?PAO:
15:4;i
15:4 8
-1
OCCOon
CCCCCCCC
000000
CCCCCCCC
IIIII
1111
NN
9N
NN
NI
NN
NI
NIN
NI
WNN
NY
NNI
NI
NN
!N
N
NN
NN NR
ivKN N
NNItN
NNNN
N\
N
NN
NK
*
NW
NN
NN
NN
0000
0*@
* **
0
.4 x
.
IIIITI
LL
LL
LL
LL
.L
TI
IT
II
II
L
LLLLLLL
LL
L L L T "1
LL
Ll
LL
LLLLLLLIL
vS
Dl,'
Ss
ss
SSSSSS
22
22
DIII
DUDe
S.SsS 9S
S!;Fsss
sssss
SSSSSS
TT
II11
Ii"I
22
22
SE
22
22
.Dll
;;;
ss
IT
;
22
22
2222222222
2222222222
ss
II
II
A
Sssv.rsSs
ARECTT
ARPCTT
B IN CCI N
VAX/VMS
VPX/VxS
AR . CTT
BICCIN
RINCCIN
;;
RRRR
R B
R
R
PPRR
R R
'R R
R
H
H
0'
22
22
22
22
s
AAA
A
A
A
A
A
&
AAAAA
A
A
A
A
AX/Vr S
222222
222222
DID,
I
RRBR
R
R
coo
R
R
PRRR
R r
R R
R R
R
0
0
0
0
0
0
0
0
0
0
Coo
4-APR-1980 15:4P3
4-APR-1980 15:4e
4-APR-1980 15:48
TTTAT
T
TTTTT
T
T
T
T
T
T
T
T
T
T
T
LIPAO:
IPAG:
4-APR-1980 15:48
4-APP-19PO 15:48
4-APR-19P0 15:48
STAO:[OCR]BTNCCIN.LIS;2
_SIAO:[OCRIBINCCIN.LIS;2
_SIA: (OCRlBINCCII.LIS;2
VAX/vms
VAX/VMS
VAX/VMS
OLZ
a
9LeZ
(
1a
t41H
mr UOHI%
3flNLLJD
a06
oCbs :
ty~i
Z: tl 09
9LZ 01 OZ0
ar L z
L tic 10
0.10
OCE~
6 C 'C
SE00
t7 E r
fl
ul
AO3
UZD
CC )
0:
il) Al
QEOt)
'-l
OLL
006?:
0?Y
00z
C CLi
LZ01
60Z
9 L C)
.3
8 LL
ZJ~~,{~)JD~I~Z~l14 38.33I
l
01. Ud.v flZS
S LC)
Si
£ L 00
9?.
9LL L
In 0C':
L t0 1
LbO )
LGO
006t )
COCLL
Oc9t
L: 00)
D
D
VIfG
IV
Ua.LVHAt~2D VJ.YU- 0ISHUYS A4oda 3.11
5311E)
XId
vi~va lL
0 86 L 't
.11OA SiY30.
0 4Y1'
'-*-
ZCL)
t0 C
J
SIA-F
6~
UlT)
09'.'
D
0 s?:)
r SL)
A-****
i.
~i~d
L-L
*
LA srnd-Aj
LO'LA *****
iz*'. ,iuj:i LL - :'
NIDUlUl *****
.
EINoCISsm AI\
i
27-MAR-1980
C5500
291
2915
0045
C046
1
C'47
C5GJO
4CC48
.65600
0049
C6200
C63'X,
i cso
C6500
C66'3
C6700
2917
-
15:32:01
VAX-11 FORTRAN TV-PLUS V1.1-7
BIflCCTN.FOp. 1.
TYFF 2915,N
FCPMAT(* ===>FRR0P(SCP.NIN): ASCII FILE lINF
',CONTINUE
AT LINE: *)
ACCEPT 2917,NPEC
FCR"AT(I)
GC TO 200
PAGE 2
rC.*,T5,/
C
0052
053
C054
C END OF INPUT FILE
292
TYPE 296,N/4
296
FCRt'AT(I5,' LINES OF DATA CCNVERTED')
CALL CLOSE(1)
CALL CLOSE(2)
END
00
. -,I'S
i ).X/VMS
VAX/VYS
AR P
CTT
SC ANO 93
SCANCR3
SCANCR3
AR PCTT
AR CTT
4-APR-1980 15:49
LI-AFPP-19.0 15:149
4-APR-1 9 80 15:49
AAA
A
A
A
A
A
A
AAAAA
A
A
A
A
SSSSSSES
CCCCCCCC
SSSSSSSS
CCCCCCCC
SS
SS
SS
SS
SSSSSS
SSSSSS
sS
sS
ES
CS
'ti
CC
CC
CC
CC
CC
CC
CC
CC
CC
RR
P
R
R
R
-
CCCCCCCC
CCCCCCCC
AA
At
AA
AA
AA
AA
AA
AA
PRRR
,-APR-1980
LPAO:
4-APR-19PO
4-ADP-198O
IPFhO:
CCC
R
R
R
R
0
0
0
0
0
PPRR
R R
R R
R
R
TTTTT
TTTTT
T
T
T
T
T
T
T
T
T
T
C
0
0
0
0
000
NN
AAAAAA
AAAAAA
AA
AA
AA
AA
AA
PA
AA
AA
AA
AA
AA
AA
AAAAAAAAAA
AAAAAAAAAA
CC
SSSSSSSS
SSSSSSSS
PRRR
P,
.
p
N
PPRR
I.FAO:
NN
NN
NN
NN
NN
NN
NlNNN
NN !I%,
NNNN
NN
~'N14 NN NN
I.N
Nv
NN
NFNYNN
NN
NN
NN
NN
NN
NN
NN
I,
CO
CO
CC
00
00
00
cC
00
00
n0
00
00
00
oc
00
00
00
STAO:
000000
oC'000
RRPRPPRR
RR
RR
Pp
pp
RP
PR
RR
PRPRPPRR
PRPROPPR
PP
PR
Pp
P
F.R
R
pP
RP
RE
RR
RR
RR
[0CP)SCANCR3.
FCR;2
_STA0:( C.j'9SCANCR3.FOR:2
_STAO:[(OCPIZCANCP3.FOP;2
VAX/Vt,
VAY/Vim'S
VAX/VMS
333333
333333
PRPRPPRR
000000
000000
C17
cc
CC
15:49
15:49
15:49
33
33
33
33
33
33
33
33
33
33
33
33
33
33
333333
333333
I
'SD,
w
FFFFFFFFFF
*
FFFFFFFFF
FF
F?
FF
C000CC
Coocco
00
CC
00
00
CO
00
FF
00
00
FFFFFFF
FFFFFFFF
FIF
00
FF
00
00
00
00
01
CC
CC
00
00
F?'
FF
FIF
FF
00
CC
COOCQO
COOCOC
PR
\AX/VM
S
ARFCTT
VAX/VMS
ARP CTT
IAX/VvS
ARRCTT
SCANCR3
SCANCR3
SCANCP3
;;;;,
;DD
22
22
I
22
22
22
22
22
22
22
PR
;2222222222
2222222222
RR
FRRP
PRRP
p
R
RRP
RR
R
R
R
R
110
22
22
22
t;;;l
PR
PP
R
R
H-
222222
222222
RR
PR
PR
RP
PR
AAA
N
A
A
A
A
A
AAAAA
A
A
A
A
H
'I,,
REPRRRR
PRRRRRRR
PR
PR
PR
RR
RR
RR
PP
PR
IFRPRRRR
PPRPRRRR
PD
R.0
COO
p
R 0
C
R
R 0
0
0
0
RR0R
pR
0
0
p R
0
0
R
P
000
4-APR-1990
4-APR-1980
4-APR-1980
15:49
15:49
15:49
TTTTT
T
T
T
T
T
TTTTT
T
T
T
7
T
ST
IF A :
LPAC:
IFAO t
4-APR-19R0 15 :49
4-APR-1QPC 15:49
4-APR-1980 15:49
-SIAS:10#RISCACR3.FCR;2
VAX/VMS
_STAO:([CRSCANCP3.FOR;2
VAX/VMS
SIAO:[OCR)SCANCR3.FOR;2
VAX/VMS
4
0
53 3
533
566
600
700
A TPCF: ARR0TT
CF'EATICN DATE: 14-m-AE-79
C
C
C
C
C
C
C
C
7-JUL-19 FFTHCr) OF CALrULATI'NG ?VE?.GE ANGLE CRPECTED
OFDERS SCANNED FILM DATA AFTER IT HAS BEEN TRANSLATED BY
P.CCPAv SCAS.
9 D0
REAL CCC~r(40,2) ,FIDUC(2,2),IPAT.(2,2,20)
I AYEPAGE AND YARIANCE
1333-
PE.L AVIPAL(2,2),VIPAL(7,2),SDIPAL(2,2)
REAL K
1100
INTEGR
1230
IN77r.R X,Y,XY,R,LEFT,PIGHT
INT71.? FLAG1
LOGICAL*1 IFILE(1o),0UTFIL(1o),SC1FII(10)
DATA Y/1/,Y/2/,.FFT/1/,dICHT/?/
DAIA CUTFIL()/' */,OtUTfL(9)/ N'/,OUTF1LC1)/*G*/
1433
CFEA,LF?.AN
173c
TYFP
1930
111
111
PESULTS FCP FILE
C
113,tI LEFOFYAT(1CA1)
CALL ASSIGN(1,ItlFTLE,10)
Dc 114 1=1,7
)
ACCEPT
203
2L.00
1r53
113
SCN7'Il(I)='ANFTLE(I)
2530
2603
114
272.)
2930
3000
2C50
116
C
C.. .
CUTFIL(I)=I.FILE(T)
CALL ASSIGCM(2,OUTFTL,10)
CAL ASSIGN(6,SC!FIl,1C)
V.BITE(6, 116). (INFILE(I ) ,11,6)
FBEMAT(* SCANNING RESU1TS FCR FILE '*,6A1)
H
0
/
3075
2103
*C
C INITIAL RrAnT NG
FILE
"R'
FLAC1=
P=1
RFA(1,205,EMD=900)
. r
ATI-2
35'.)
2 35
27^0
3E30
C SUESEUFNT
2 00
BECORDS
R=R+1
RAD(1,205,FND=9C0)
IF (CFRAM7E.EQ.LF?1.MF)
4133
42C 0
430t
C RIORLER PCINTS
2 20
M, A/=(.-3)*.5
DC 2 0 XY=X,Y
I NO. CF IRAL MEASUREMFNTS
FIDUC(lEFT,YY)=CCE1( 1,XY)
F "UC(RIGHT,XY)=CCRD(2,XY)
60
IRAL(IEFT,XY,i'")=C0(fR(2*41,XY)
5030
IPAI(RIGiT,XY,M)=C0B!(2*M+2,X'Y)
IF (IPM.M(XEXT,XY,i).EC.0.) 'fAX=M-1
IF (M.LT.KMAX) CC TO 260
I RESET FOR NEXT FRAKE
C0CRD(I,XY)=C00RD(R,XY)
CONTINUE
52 0
5300
20
5600
CFRAME,CCCRD(R,X),CCRD(R,Y)
G TO 200
-C
4535
.90
V
LFRAME,CC0RD(RX),C0OPD(RY)
.0
100
C
2'3
330
C
4
530
601
.
CALCULAT IVvRAGF IRAl CCCPDINATFS
DO 42G IR=LFT,IcI1T
DO 42- 7Y=X,Y
AVTAI( IR,YY)=0.
VIPAL(LP,XY)=0.
S"DIP''I.
650
70
8T0
95-DO
1003
1230
130
1430
15;4.,
1600
170
1600
1930
1953
2000
426
427
XY
=
C
AVIRAL(LP,XY)=AVIRAL(LP ,XY).+IRAL(LRYY,M)/? tIAX
CONI'UF
IF(MRAX.EC.1) GC TO 449
1,'MX
DC 440
LF=LEFT,RICT
nO 44
DO 440 XY=X,Y
VIRA!(IR,XY)=VIPAL(IR,YY)
12e
430
435
2103
2233
2330
1
2
2500
26 )0
2702
2735
1440
'49
C
2710
C.../
2700
(To
CCOTIN7'u
DO
30 11=1,'AX
43- LF=LiFT,PICIT
DO 43') XY=x,Y
IF(V'AX.Nr.0) CC TO 428
URIT:(6,426,FRR=427) FPF
O.,,18)
IMAY=O 1 FRAME
FOP'AT (' ===>E-F-fRtSCANOI:
F=1
RFAD(1,205,END=9C0) LFRAMPE,CCOPD(Po),CCOPD(R,Y)
"JO TO 200
420
+
(IRAL(LR,XY,.)-AVIRAL(L,XY))*(IPAL(IRXY,.)-AVIRAL(R,.Y))
/( M 'AX-1)
SDIR)AL(LR,XY) =SCRT(VIRAI(LR,XY))
CONTIP4uE
CCNTINUE
29 1)0
2930
C
C
CALCULATF FLCPFS AND ACLTS
C######
3100
32)0
33)0
3140
34.) S
1
325
/(FIrUC(FI'iT,Y)-FIDUC(LEFT,X)11 HNLE=ATAN VSLCPE)
E A ?GLF=) .
WFP7*T=1./(FL,0AT(YMAY))**2
DC 450
=1,'MA)
3415
3423
3425
DC 450 J=1,32IAX
C
353
36)3
1
3610
37 )3,
3750
GO TO
C
3410
3433
3466
ZFRC nIvIrE C!IFCY
IF(FIUC(zIC11T,/X)-F1t)UCL Ft,Y).E.7.)
:.'-cLPF= (FT LUC( PI C-T,Y) -F47DUC UEFT, Y))
450
3760
3770
3790
3793
38,3
4100
451
42)0
C
4225
4237
C######
+
#tgni44 ZEPO DIVTDE C1iFCY
IF(IRAL(RIc.'T,X,T)-IRAL(LFFT,X,J).FC..) CO TO 450
ESLGPE=(IPAL(RICG
,Y,I)-TlAL(LEFT,YJ))
/(IRAL(PIGHI,',I)-IRAL(LEFT,X,J))
TELTA =XTA'N(FStCE)
=ANCLE + VEIGHT*DELTA
CoWTTP;UE
IF(EANGIE.NE.O.) CO TO 452
WRITE(6,451) LFPkmE
FORMAT(* ===>ERPCR(ECAXCR]: ANCLE CAlCULATION NOT CA'RIEDI,
9 CUT IN FRAMF',I5,/,'
SEE RAW DATA')
RANCLE=EANCGLr-HA
452
GLE
CALCULATE STANDARD DEVIATION OF ANrLE
ZERO DIVIDE C;iECK
IF(UTRAL(FT,X).NE.AVIP(PCHT,X)) GC TO 475
V.A NL=0.
4239
4241
SD AlGLc=0.
424 3
4245
4247
4248
4253
FCRMAT(' ===>7RCR(fCANCP): AVG. X CCCRD. ALLIGNED;',
471
+
475
4350
4350
+
L:450
4913
4910
4920
5110
5200
5300
5400
'
UARLV TO CALCULATE VARIANCE CF ANGLE')
O TO 4 9C
K=1./(AVTFAI.(LEFTI,X)-AVIPAL(FIGT,X))**2
VAlGF=K*(.25*(SN(2*EANGLE))**2*(VIPAL(RIGT,X)+VIRAl(LEFTX))
+ (C'S(ENGCLF))**4*(VIPAL(RIGHI,Y)+VIPAL(LEFTY)))
SDANhLv=SRT(VANGLt)
C
C
CCXVFRT FROM FADTAKS TO CECREES
490
HANGLE=4ANGLE*57.296
EANGlF=EA NClE'-57 .296
RANGL7=R NG&0I F*57.296
SDA1CLE=SDANGLE*57. 296
C
C.../
H
I~3
(.4
1~)u
23
C "TYPE
+
575
793
830
9 35
3 D5
+
+
307
913
110
:
1200
1343
140-,%
15.143
16!) .
16 5)
1654
1656
16 62
nUTPUT
WPIIF ( 6 , 305 ) LFRP E,(F IDUC ( TJ),Jr=1, ),J= 1, 2)
((VFALY,L,1),T.=1,2),Y=1,2)
F0Rv!T(*4N
o.,4/
177,FfIDUCJARY rAPKs: 1FT(',2F7.0,*) PICiT(',2F7.(,),/,
17X,'IRAL LA NDrA FKS: IEFT(I,2r7.0,I)
PTG)T(',2F7.P,*)*)
WRITF(6,307) (((T',AL(K,L,"),L=X,Y),F=LEFA",RIGHiT),M=2,rNAX)
FOR'A7(s
+
309
+
311
+
321
+
+
+
1664
12 3 3G
1666
WFITE(6,309) ((VIRAL(LF,XY),XYX,.Y),tR=tFFT,RIGHT)
FORrAT('
VERACE:
LErT(*,2F7.0,') RIGHT(*,
2F7.C, *) )
WRITE(6,311) ((SDTRA(LR,XY),YY=X,Y),LP=LFFT,PIC1?T)
C
STn DEY:
2F 7*C,I)
(*,
2F7.3,*)*)
WRIT-(6,321)
IhANGLE,FANLFE,RJNCI,SrcAGLE
FORMAT(*
PEIAD ANGLE WPT FTII JF7.1,
rEG' /.
*
FYF ANGLF UPI FTIM: *,F7.1,* rFG',/,
*
FYF AGLF WPT HFAD: ',F7.1,* tEG*,/,
*
STD DEV CF EYE ANU'LF WPT FTIM:*,F7.2,
+
lox,* ----------------------------------------------------- 0)
FRA =1FRAME
! FLOAT FRAXE NUMBER FOR PLOTTING
URIT(2,323) FRAUF,ANGLE,SDANGLE
12i
323
FCRQ!A.T(Fq.0,F9.
22..,-
325
LFRAE=CFRA !'?
IF (FIACI.NF.1)
GO TO 91C
900
910
3000
1
,w9.2)
5=1
24C0
2 _0
293 c
s)
+
19G15
2630
(*,2F7.0,
2F?.0
)
911
CC TO 200
FLAG1=1
CC TO 220
! PFCCESS lAST rRAMF
TYPE" 911,(pjFjjr(j),j=1,6)
WRITE(6,911) (INFTLE(I),I=1,6)
F0R.MT(O0END OF FILE *,6A1)
END
H
124
V
FLASH
RING
-C
FLASH
UNIT
lw
z
FLASH
POWER SUPPLY
CAMERA
A.C. IN
Y
U
7D
0
1
TO
RECORDER
1
INTERVALOMETER
BOX
DOME MOTOR
CONTROL BOX
X1
MOTOR
TOMARKER
SWITCH
POWER
SUPPLY
APPENDIX C.
Schematic of Dome Circuitry
A. C
SIN¢
125
+15V
75
2.7K
360
360
430
500
2N1724
82
7.5 V
F!iN5236
IN5225
5.7V
IN5225
TO
MOTOR
IN5228
3.9V
I
I
TO VCO
INPUT
a
SENSE
DOME MOTOR DRIVE CONTROL CIRCUIT
126
D
F
120&)±L
5.4.V
1N5223
27V
D
IN5223
2.7V
H
p
ADJ.
3HZ
2H21
IHZ
27M
40ms
60ms
510K
IM
qIOK
5M 400K 500K
IM
4
LL
14
IOK
B
50pF
10K
6
IOK
555.
74121
2
1
..
...
J
13
1
INTERVALOMETER
CIRCUIT
7
A
127
?+15V
.
C6
VDD
.lF= 6
vcc
SvcO
9.1K
i
30K
2N3906
91
51 K
4
Z0K4
vU
2N3904
-.
21N390E
IN
4046
vs2
12K8
30K
5
20 K
2N3904
3.OK
"
9.IK 2N5088
IK
120K
'
CAMERA
PULSE IN
vCO
VC0
IN
SENSE
INSTRUMENTATION CIRCUIT
3.OK
IOK
-7. ..'..127
1
....... .. ... ... ...
......
.....
IN\T
:.AI
L
LI~- ~~-,.---
---
~ ~
I
> s
'~...
~
i
~
v.7.if
weto
i~
~
O...PUT
T
L'I
I
...~..
t
~L
~.........
, --....
{...
7
a .........
~
...
iL
....
...
....
p~~
-7-~~
ASAPL
..
...
.
.. . second
.
77I
......
.i
i
129
VAXVMS
VERSION
1 TEST
DBAI: 86123.ARROTTI VARIAN.PLT;SS
S-)AY-79 13:06t28 PICTR-PLOT7
VAX/VhS
14
}
* I.
12
6tC..
x
4.j
It
x
10C"
w
A
83
-;~~
x
x
x
'4,
I
I,'
x
4
x
4
43~4
I.
x
I.
2
-~
~.
1.
.sc
~1
* 4.
33.gs&c~d
4',
60
62
64
Exp.13A
66
Ulf Merbald
68
70 ,
74.
72:
.45' deg'/see'C CW I CS)i
'
I.
t
14
12
I
'
,
t
L
I
se.rec..
It.
!z.,
tc
O\
\
X\0
10-
x
CD
x
8
Cn
x
x
.x..
*I?
Ii:
xi
6
Out
coaUs;r3
4
&(OL
04
-
2
IV.'
it
0
72
T A
t
1
74
Exp.13A
76
78
Ulf Merbold
30
APPENDIX D.
MONOCULAR
c
60
deo/sec CW
Section 1
82
CS)
84
130
. VAX/VMS
VERSION
1 TEST 8-MAY-79
VAX/VMS
DBA1: 86123.ARROTTIVARIAN.PLT;88
13:07:41 PI.TI-PLOT:
14
12 -
I
a
~
x
10 -
x
x
.I-
x
e
-"
6
x
x
h...
x
-
4
x
x
x
x
.~*i~o
2 -
~.a :.
0
62
84
(L~
~~c*
92
t94
66
66
90
Exp.13A Ulf Marbold 45 deg/sac CW T CS)
96
14
Ss.c.e
12
10
f-\
6
-0
a,
C
6
x
4
x
-
x
x
x
x
x
x
2
-
_
_
__
_
_
~___
0
94
104
102
100
98
96
Exp.13A Ulf Merbold 45 deg/sec CCW T CS)
106
131
14
~~~~1~~~~
12 10-
e C
\0
iecl oy\
6u ti\3
fteiOn\
?-int 20q btyora
6 -
x
4
s
x
x
x
2h
%~~+.4
tf
0
204
202
200
Exp.138
206
208
210
212
45 deg/soc CCW CD)
Ulf Merbold
214
14
12
10
8
yx
NMectun\
Y\0
ID
6
4
x
x
x
x
x
x
2
2
212
x
x
214
216
Exp.13B
218
Ulf Merbold
220
222
60 deg/sec CCW CD)
224
226
132
SVAX/VXS VERSION
I TEST
8-MAY-79
13:13:22
FICTR-PLOTI
DBA!:
86Z23.ARROTTIVARIAN.PLT;92
VyC/VNS
14
I
12 -
ec'
10 -
xio \
x
x ry\i
0,
S
*0
8
I'-,
S
C
6
4
x
x
x
x
2
x x
x
'LI
ox
226
224
230
228
Exp.138 Ulf Merbold
236
234
232
30 deg/sec CCW CD)
238
14
-
12
*koI
10
x
m
S
x
6
x
S
a,
C
x
6
4
2
x
YW\ \
g\o
OIYs 143@
vetyAfl,
t tioy\
-
1.O0&.
0
236
238
242
240
Exp.138 Ulf Merbold
246
244
60 deg/sec CW CD)
248
250
133
VAX/VXS
1 TEST 8-MAY-79
VERSION
13:14:49 PICTR-PLOT4
VAX/VMS
DBAI:186123.ARROTTIVARIAN.PLT;95
14
12
10 -
x
x
xx
xx
0,
S
*0
B
x
x
S
6
tCA o
xf~o
.
4
A
x
vuttLEA
2 0
248
25e
256
252
254
250
Exp.138 Ulf Merbold 45 dog/sec CW CD)
260
I
14
12
10
x
Cn
x
r-%
-x
x
X
x
x
Ac~'WY
t'
25e
260
262
264
266
268
Exp. 1 3 6 Ulf Merbold 30 deg/sec CW CD)
270
134
VAX/VTNS
VERSION
1 TEST
11:57:34 PICTR-PLOTI
9-MAY-79
VAX/VWS
DBA1:186123.ARROTTIVARIAN.PLT;97
14
SC..
I I
12 101-
9-N
C
n
ve-C
Y\0
DIOV\
\-f
81
6
x
4
x
x
x
x
x
y
2
x
2,0 sec.
270
268
x
I8.5 sac~
x
x
-L
-L
0
x
278
280
276
274
272
Exp.138 Ulf Merbold 45 deg/sec CCW T CD)
282
14
12
1s~.c.
-
x
x
10 I-
0,
8
x
x
0,
C
6
4
2
x
x
h
280
AiYc~~\
r cc
232
23
230
292
294
x
S 0VC.
0
-
282
19,6%
284
286
''
288
Exp.138 Ulf Merbold 45 deg/sec CW T CD)
135
VAX/VMS
VERSION 1 TF
9-14AY-79 11:59:22 PICTR-PflT3
DBAl: 86123.ARROTTIVARIAN.PLT;99
20
1-%
0,
co
C3-
-.-
18
FT
16
F
I I s-C.'
r-
I
x
14
VAN/VMS
-
x
x
x
x
x
x
x
x
\1 -C,
i%
V
12
10 1-
'+nt
.CA.O,
2,
6
tI
I
6
2
4
6
8
10
12
Exp.14A Claude Nicollier 60 deg/sec CW
14
6
20
tI-'
0,)
C)
16
-
16
-
L
-~
-
%f\ect oy\
auv "3\
"fe-c 0Y\
14
0,
C"
12
-x
x
x
.........................
x
10
x
6
I
6
14
16
I
I
II
18
20
22
24
Exp.14A Claude Nico!lier 30 deg/sec CCW
I
26
t1
26
136
VAX/MVS
VERSION
1 TEST
9-KAY-79 12:00:24 PICTR-PLOTS
DBAI:(86123.ARROTTIVARIAN.PLT; 101
VAVVS
20
18 -
sk,
, 1
8 % iAc*
3:
16
14
x
x..
xx
-n
C
12 -
x
x
x
x
10
?0%
33 41OV4
8
K
23.1 c
r,
26
28
30
32
34
36
Exp.14A Claude Nicollier 30 deg/sec CW
38
40
20
18
16s
n\
0
A\
f0,
a:
cA 0V\
14
x
12
x
x
10x
8
.
Ss*.c~.
6
38
40
42
44
46
48
Exp.14A Claude Nicollier 45 deg/sec CCW
I
50
52
137
. VAX/VYS
VERSION
I TENT
9-MAY-79
DBA1:IS6123.ARROTTIVARIAN.PLT;103
12:01:51 PICTR-PLOT7
20
VA jVe
.
I
16 -
i
4
Y\
16a,
01
-a
vicclov\
Au-\
0\
(
(\O
14 -
S
0,
C
12 -
x
x
x
x
10 -
x
x
V
e
50
x
X
X
18.4 set.
52
xX
I
54
56
5e
60
dog/sec
CCW
Claude
Nicoilier
60
Exp.14A
62
64
74
76
20
16
a,
14
<
12
x
X
x
x
x
x
x
10
8
'
6
62
I'
64
se
I40st
72
70
68
66
CW
deg/sec
Exp.14A Claude Nicollier 45
VAX/VWS
VERSION 1 TET
138
9-MAY-79 12:02:55
PICTR-PLOTJ
DBA1:(S6123.ARROTTIVARI1AN.PLT;105
VAX/VAS
20
i5~LC..
16 -
-',
01
\f CA io \
V\ o
14 12 -
x
x
x
-x
x
x
10 8
xx
xx
x
x
r74
Il'
70.0 sec.
'.0 6kL.
6
xx
76
76
80
82
84
Exp.14A Claude Nicollier 45 deg/sec CW T
86
sE
3
20
18
-
-~
16
x
01
14
x
S
x
12
x
x x
4
10
Y\O
x\C'f
\f\V\
8
I
__
_
&
-j
86
88
90
92
94
96
Expl4A Claude Nicollier 45 deg/sec CCW T
98
100
139
VAX/MS
VERStON I TEST
9-14AY-79 12:04:39 PCTR-PLOT<
V
VAX/VM
DBAIU8C6123.ARROTTIVARIAN.PLT;W$
14
12 -
10 a,
-a,
8
?O In IIs
~o}
6 4
x
x
61,11
101- 10
coyn
out
X
x
111
112
X
2
I..
.
0
106
107
:.
\
108
109
I3.
110
114
113
115
Exp.148 Michael Lampion 45 dug/sec CCW T
I14
12
10
a,
-o
e
x
xxx
\ e
a'
x
x
x
x
C
6
4
-
\
-.
2
t'
t.
2,1ac,1%.%
rm
114
116
118
120
122
124
Exp.148 Michael Lampton 45 deg/sec CW T
126
128
140
VAX/VMS
VERSION 1 TEST
9-MAY-79 12:05:39 PICTR-PLOT>
DBA1t(86123.ARROTTIVARIAN.PLT;110
VAX/VMS
14
12
.rC.
I
I
10 a,
-a
w
8 -
'-A
x
C
x
x
x
x
x
x
.x ...
x
x..
x
X
61-
f\
4
I
CDAY
\l\r-
Nft *OY\
2 1.0 SLC.
I
0
126
126
130
132
134
136
Exp.148 Michael Lamplon 60 deg/sec CW
140
139
14
12
10
r-N
C"
e
x
x
x
x
uf4
4
V\0
x
\
tck ioy\
2
L~5~Q 'ac.
0
136
140
142
144
146
Exp.148 Michael Lampton 30 deg/sec CW
148
'I ~
150
141
/ D
YL'V36
V!SOM
I TEST
9-MAY-79 12:06:45 ?ICTR-PLOTA
VAX/VMS
DBAI:186122.ARROTTIVARIAN.?LT:113
14
12
-
10
a,%
8
x
xx
x.
x
x
x
6 4
X
.
II\
xI
2
f.
sac,
0
148
150
:t
14
162
160
158
156
154
152
Exp.14B Michael Lampton 45 deg/sec CW
164
sec..
12
10
Y*eo'i
I-
c,
Qj
u c ioY\
C
x
6
x
x
x
x
-xx
x
x
x
x
4
2
0162
3.0at.
3.O~c.
164
16-'.s .c.
I~s~c.
I
170
172
168
166
Exp.148 Michael Lampton 30 deg/sec CCW
I
174
176
VAX/VMS
VERSION 1 TEST
9-MAY-79 12:07:38 PICTR-PLOTC
4A
VAX/VMS
I
tiec.
12 -
10
DRAL l86123.ARROTTIVARIAN.PLT;115
K
ai
'iecAn
nlo
M,
ct
'1,i0
e x
xx
x
x
x
4
2 -
8.4sac.
c
0
174
176
180
178
182
184
Exp.148 Michael Lampion 45 deg/sec CCW
186
188
14
10-
Uc Y\
CD
4ecko\
'-/
a,
C"
12
i
6x
x
4-
2 -4-.2
186
-C.lee
196
194
190
192
CCW
deg/sec
Exp.148 Michael Lamplon 60
200
143
* .. kVx
0
0
0
VUMOY 1 (I:T 1I-.L-79 23:15:46
VAX/VMS
DBAI:r86123.ARROTTIVARIAN.PLT;20
PICTR-PLOTI
-10 r-
x
rnM
-12-
x
W
-13
x.
x
<
L
-14-
Sc
C
0
x
x
x
-Is-
*
* *
-
*
-161-
C
-17 I
______
--
0
Fram. No.
25
20
15 *
10
5
PARABOLIC FLIGHTS Mar79 #121
Nicollier
-13
,
-14-
LU
x
x
x
I-'
au
x
x
-15 -
xx
x x
T
x
*
-16-
*
0
Z
*
-171~
0
u
-18 -
-19
0
I
5
Frame No.
I
I
10
15 -
20
PARABOL IC FLIGHTS Mar79 #123
Nicollier
APPENDIX D.
Section 2
ifr
01
VA~VXKS
J
.
VL;StOX L T=T 11-JUL-79 23:17:24 PICTII-PLU'TI
0
44
VAA/V-I*S
DfIltizl623.ARROTTIVARIAN.PLT;22
-10
-12
-
x
x
x
x
xx
0-%
-14
x
-x
C"
'16
=r
w
x.
48
ai
-20
u
-22-
x
-.....
-24
0
5
20
15
10
25
30
PARABOLIC FLIGHTS Mar79 #124
Frame No.
Nicollier
-10
I
I
-T-
.....................-
..
-
x
.12 -
x
U
-o
'-I
S
LU
0
U
01
C
-16 -
C
x
x
x
-18
*
L.
U
a
*
x
C
a
a
x
-14 -
x
-20 -
U
-22
0
5
Frame No.
10
15
20
'
25
30
PARABOL IC FLIGHTS Mar79 #125
Nicollier
_35
145
vjx,.* visux
i rEST-.
0
0
1
Ii--JUL-79 23:20:47 PICT-1'LOT1
-.-
1-11-
-
-Tr
-12 r-
V,%a , Hs
DBL&1: 1~l123.AflROTTlVARIAN.PLT;24
-14 f0"
Go
x
:w
ai
*
It
-16
~
**
xx
W
cn
-16
x
-*
*
x
*
-20
-22
0
10
5
Frame No.
15
25
20
--
:
45
r
r
-
40
PARABOLIC FLIGHTS Mar79 #126
Nicollie
-14
35
-30
~
.
.
xF
- -
.-
---.--
--
---
I
-
-
-x
x
*-I,
x
M
cn
a
-14
-15
x
CD
CD
. m
~,
0
C
x x
.*
-IE
x
-16
x
-17
..0
**
-le
I-
I
_
_
_-_
-19
-20
0
5
10
15
20
25
30
35
Frame No. - PARABOLIC FLIGHTS Mar79 #127
Nicollier
40
45
146
Qi
V
4Ak
S VFPSION I TET 11-J!tL-79
-12
DAlI: 1 S6123. ARROTTIVAR IM. LT; 26
23:22:30 PICTR-PLOTI
x
-
x
-14
x x
xx x
-15-
x
x
x
xx
x
-17 I
"-18
TI
0-20-
*
I
-21
5
0
10
Frame No.
20
15
30
25
PARABOLIC FLIGHTS Mar79 #128
Nicollier
-12
T
- 13x-3
x
x
p.
f-
-14 -
x
xx
-15
-
c"
~0
*
-16
u
-17 -
-18
4!
~k
*
-4-
-19
0
5
Frame No.
10
15
20
25
PARABOLIC FLIGHTS Mar79 #129
Nicollier
~1~
*
30
147
-3
W2
I
0 .
0*
V2.4 SVE'SION I TEST II-JIT.-79 23.30:39 PICTR-PILOTI
VAX/V.4S
flii~i 8I23.ARICOTT)VARJAN.?LT;34
x
x
-4
w
x
~~~1
S
0
S
0,
C
-6L~
xd
9
~
C
a
a
a
-7
+
0
-E
H
*
U
0
20
15 *
10
5
~1,
*
I
-9
25
PARABOLIC FLIGHTS Mar79 #137
Frame No.
Garriott
VM*2012. "
-1
I
I
I
I
x
-2
x
en
7
x
x
-4
x
0
*
al
c
*
*4E
-6 1-7
0
u
29
10 L
0
*
*
*
I
--
5
Frame No.'
10
15
14*
I
20
25
I
30
PARAPOLIC FLIGHTS Mar79 t-138
Garriott
N',
35
148
VAZ~i
va
0
0
VE1RION I TEST 11-JUL-79 23:32:29 PICTR-PLYTI
DIAl:[CS6l23.ARRTTJVARIA'.PLT;36
VA.XA'S
-
-4.0
-
-
x
-4.5
-x
x
-5.0
tIJ
-
x
2,n-5.5
xx
0
x.x
.-
xx
6.0
-
x
x
_
_
-7.0
0
2
Frame No.
6
4
10
12
PARABOLIC FLIGHTS Mar79 #139
Garriott
-3
x
-4.
a,
0D
-5
0)
LU
*
0
S
C
C
-7r
I;,
a
0
*
-z h
*
L
* ~e
*
*
k*
a'
C
0
U
-10 1
0
5
Frame No.
10
15
'20
25
PARABOI..IC FLICHTS Mar79 #140
Garriott
30
0
VAX/VXS
VERSION I TEST 11-JUL-79 23:35:08
ICTR-PLOT1
149
S
0
0
VAX/V)3S
JAl: 1S6IJ3.ARROTTJ'JARIAN.PLT;38
1D)
0,
x
x
.4-2
x
*
~0
u
-'--
**
-7
0-9
10
15
20
25
PARABOLIC FLIGHTS Mar79 4141
Frame No.'
- Garriott
I
I
x
-4
x
xx
-5
LiJ
0
0
01
x
-6
x
*
x
x
4
**
x
x
-7
0
c
-E
0
-9
-10'
0
5
Frame No.
10
15
20
25
PARABOLIC FLIGHTS Mar79 #142
Garriott
30
150
0
V.C/VXS
VYIS!ON
0
0
I TFSr 11-JUL-79 23:36:26 PICTR-PLOT1
-2
I
II
-3 F-
VAN/V4S
DZIAl: fS6l23.ARROTTIYARIAN.a'LT;40
x
-4
LU
-5x
0
c
-6 -
x
xx
x
-7
x
0
a
x
x
*
x
x
-6
4~
;~-
4.
-9
1
-10
1
30
25
20
15
10
5
11
PARABOLIC FLIGHTS Mar79 #143
Frame No.
Garriott
1
I
I~
I
I
01
-1
x
x
h
x
-2
x
x
0
x
x.
-3
x
0
-
-4
4
u
-5
-6
HI
-7
5
10
Frame No.
15
20
25
7:
30
PARABOLIC FLIGHTS Mor79 #144
Garriott
35
151
'T;-VtiHS
0
0
0
VEMStQ? I TEST 11-JUL-79 23:39:26 PICT-PLOTI
0
x
x
XX
x
-1
x
al
DBAI:(86123.ARROTIVARIAN.PLT;42
x
X
-2 -
xx
x
uJ
-3
x
-4-
-501
u
-6
-7 I-8
'9
____L~-
-9
15
10'
5
30
2 5;
20
35
PARABOLIC FLIGHTS Mar79 #145
Frame No.
Garriott
-26
-27 I-'
01
a,
-26
-
L
x
a,
Lii
-29 -
a
S
C
C
x
-30
x
x
x
-31-
x
a
a
x
* *
x
a,
C
0
U
-33
x
L
-w
4
x
-34
0
5
Frame No.'
10
15
20
PARABOLIC FLICHTS Mar79 #1.46
Garriott
25
152
VAX/VIS
0
0
VERSION I TEST 11-JUL-79 23:42.07 PICrR-PLOTI
VAX/.xS
DBA1tISC23.ARROTTIVARIAN.PLT;44
2.0
I
-
1.5'71.0
.
-
x
-.
_- 0.5 0
0.0--
x
xx
<-0.5
x.
a
S-1.0
-x-
-1.5
-x'
x
x
x
-
Je
x
u -2.0
-
-2.5
0
2
4
Frame No.
6
-0
PARABCLIC
Garriott
10
.12
14
FLIGHTS Mar79 #147
i1
18
-
E'eS
VLU!OY
153
0
I 1E
0(86123.ARROTTIVARIAN.PLT;49
11-JUL-79 23:48:27 PI.TR-PLOTI
-r
0
DHA1
.4
.-
r~--
VA ..-....a
I
x
--42
x
*
xx
-43-
x
x
x*
0
4-n
-44-45-
4
xx
'u
-46-
7
-47-48
0
5
10
Frame No..
15
20
-
25
30
35
PARABOLIC FLIGHTS Mur79 #160
.Parker
20
19
-!
C"
%u
'0
18
-
x
17
x-
16
15
u
14
-
-
-
-
13
r
12
11
2
4
Fram9 No.
6
'0
10
*i2
14
PARABOLIC FLIGHTS Mar79 #161
Parker
16
le
154
.
O
~Vyd
VM10N
0
0
I
TT
lI-.JUL-79
23:51:04 PICTR-PLOTI*
18 I
i
I
I
I
x
17
x
x
x
x
16
a.
-o
v.~:iv~ss
DBAl: [S4123.ARROTT!'VARIAN.PLT;52
x
S
w
15
C
S
0,
C
14
C
13
C
a
a
12
I..
a'
C
a
11-
U)
I
10
0
2
4
8
6
Frame No..
I
I
I
14
16
1e
I
10
12 -
if
20
PARABOLIC FLIGHTS Mcr79 #162
.Parker
18.5
I
i
4
~~~~1- -
x
18.0
x
x
-
2
c" 17.5
17.0
x
x
16.5
x
x.
.1.6.0
x
x
x
0
c
*
15.5
*
15.0
I 't,
I
14.5
0
5
Frame No.
10
15
.20
25
PARA9OLIC FLIGHTS Mor79 #163
Parker
30.
155
a*V
A' Ms
0
!O! I TEST 1l-JUL-79 23:S2:33 PICTI-PLOTI
DBAL: 186 123.ARROTTIVARIAN.PLT;54
-
18.0
I
x
17.5
V~
*
x
*
17.0
co
-
1s.5
x
x
x
16.0
-2
cn
W
01
15.5
VA1
x
-
x
*
15.0
x
14.5
C
u
14.0
x
13.5
13.0
x
I
12.5
0
5
Frame No.
10
-
I
4
6
15
20
25
PARABOLIC FLIGHTS Mar79 #164
Parker
30
.
156
VAX/VMS
VERSIOx
1
TEST
16-JAN-80
14:51:45 PICrR-rLOT7
26
VAX/VNS
xx
'I
I
I
x
x
x
24 h
x x
w
-j
z
x
22 I-
x
w
w
x
x
x
20 I-
x
x
Cr
x
x
18
16
x
'
Ilm V
350
jI
.j
v
360
355
FRAME
*
cc
I
365
370
-e - X x
x
x
Lu
LUJ
-10
_
375
I
I
I
x
x
Lu
__
T
w
I
-6
I
NICOLL.IER
C-+500)
5
I
-
x
x
x
x
12 I-
x
Sx
LL
LjJ
x
-J
xx
350
355
FRAME #
NICOLLIER
C+5100)
L,
370
365
360
CCW
APPENDIX D.
T
Section 3
BINOCULAR
375
157
VAX/YVS
VERSION 1 TEST 16-JAN-80 14:51:10 PICTR-PLOT>
31
VAX/VMS
x
x
x
30
x
29
x
-x
x
x
26
LU
25
x
x
LUI
z
x
x
27
-J
x
x
28
x
LU
24
Ho
23
I
x
22
330
340
335
FRAME
#
I
x
T
Cw
0
350
NICOLLIER
C+5100)
60
-1
345
r
i
x
-2
x
-3 LU
z
Lo
-j
x
x
-4
x
x
x
-5 H-
x
x
x
x
-6
x
x
-7
-8
330
x
x
x
N1V
FRAME 4
345
340
335
C+5100)
NICOLLIER
6o Cw
T
350
158
-AX./TXS V-S:O
I TST 16-JAL-SO
:4:53:10
AX/YM
PWCTR-PLOT.
36
34 I
X
x
30
LU
IJ
z
x
26'
LUI
x
XXX
LUJ
-
26
XX
XX
x
24
22
305
I
V1
FRAME
NICOLLIER
C+5100)
#
3 30
325
320
315
310
300 cw
T
4
2
X
0
X
X X
x
Ld
-J
z
LUI
LL
-
X
-61-
X
X
X
X
-6
x
x
X
xx
x
x
QXVXDVSX
-10
305
FRAME
320
315
310
#
C+5100)
so,*'
C
N=COLLIER
T
325
330
159
VAX/VMS
VERSION I TEr
16-JAN-80 15:47:44
VAX/VMS
PICTR-PLOT(
25
24 -
e
x
X
x
x
x
t
23 x
22 x
21LO
z
-J
'I
x
x
x
x
20 19
i
x
x
x
x
x
x
x
x
-
17 ,
lb
2 85
f\\
290
295
FRAME #
300
NICOLLIER
C+5100)
cO'
3J 10
305
T
cC w
LO
c-
-6
-7
- x
-8
xx
I.
-9
Ltp
x
-10
xx
x
x
x
x
Lo
I.L
LU
-4
x
-12
x
x
-13
x
x
x
-14
t
-nL
-15
2 85
290
FRAME #
300
295
C+5100)
0'
305
31.0
NICOLLIER
CCW
-
I
i
160
VAX/VMS
VERSION 1 TEST 16-JAN-80 14:46:01 PICTR-PLOT;
VAX/VIIS
29
x
28
-
27
x
X
28
LUJ
-j
LO
LUj
Lo
H-
Ir
-
x
25
- -x
xX
24
X
23
21
265
k
X
V
XX
22
x
-
_
270
280
275
__
_
_
285
290
NICOLLIER
FRAME #C+5100)
qS'a Cw
T
0
-
-1
x
-21
-
~
X
-
LU
-4.
ID
Lo
LU
LL
-4
X
Xx
X
=
X
x
x
-6
-
X
x
x
Xx
7
m(
__XL
_
-8
-25
265
270
FRAME #
280
275
C+5100)
.50
CN/
NICOLLIER
T
285
290
161
VAX/VXS
VERSION I TEMT
16-JAN-90
VAX/VXS
14:44:36 FICTR-PLLXTS
25
24
24
-
I
XX
xX x x
23 -X
x
x
22 xx
21 -
z
LUJ
20 -
x
X
19 -
H
H
XX
XX
'
18 17 -
't
16
220
225
FRAME #
235
230
2 45
240
NICOLLIER
C+5100)
3Q
0
ccw
I
-3
-4
-5
x
LU
-1
X
X X
x
X
z
- -*
xx
LU
LUJ
LL
LUI
-
x
x
-10
-11
-12
220
225
FRAME #
230
C+5100)
23
235
NICOLLIER
30" CCW
4
240
4
245
162
24
I x
xx
x
23
x
22
x
21
-J
x
x-x
20
x
x
Xx
z
19
x
x
18
Hi
QI
H
17
15
20 0
. v.
A
_______x___
205
210
FRAME #
215
220
t
225
C+5100)
NICOLLIER
L*
CC'A
-4
x
x
x xx*
x
LUJ
x
x
z-1
LUJ
x
-10
x
Xx x
LUI
x
LL
LUJ
-12
-14
200
I
205
FRAME #
,
I,
210
C+5100)
L4f
..'-V$ I
X
215
NICOLLIER
\CCW
4
1"
220
225
163
.
VAX/VMS
VERSION
I TEST
16-JAN-80 15:47:09
PICTR-PLOT6
VAX/VMS
27
x
26
25
x
x
x
24
z
x
x
x
23
-
22
xx
x
x
xx
21
I
x
20
H
19
X X
NV.N . S
1e
180
185
190
FRAME #
C+5100)
T
0,,V.
195
200
205
NICOLLIER
60' CCW
-2
x
-3
x
-4
x
-5'
w
-J
z
-6
I
x
x
x
I
-7
u
-8
LL
-J
x
x
x
xx
-9
-101
x
-
XX
-11
180
185
FRAME #
190
C+5100)
195
NICOLLIER
60* CCW
200
205
I
I
164
VAX/VMS
15:J:01 PICTR-PLOTS
VERSION I TEST 16-JAN-60
VAX/VMS
30
2e
26
x
Ld
IJ
z
x
x
x
x
LUI
xx
xxx
X
22 I-
x
x
c .'.
20
160
170
165
FRAME
# C+5100)
x
x
jx
5A
175
160
165
N.COLLIER
ccw
q-s*
-2
x
-4
x
x
L-i
.
co
-8 I
LU
xx
x
X
LL
LUJ
-i
4-
-x
__j
LU
x
-G
x
x
10
IV,~I
___._
-12
160
FRAME #
175
170
165
C+5100)
q9
cCckw
NICOLLIER
160
185
165
. VAX/VMS
VERSION 1 TEST 16-JAN-80 14;59:29 PICTR-PLUT4
VAX/VMS
30
28
26
x
x
Lu
24
-J
x
X X
z
x
x
X x
u-i
xX
22
H
N.V.
20
140
.y..
t
145
150
FRAME # C+5100)
30' cw
155
160
nicollier
I
I
0
X
-2
xx
x
-4
x
Lo
-6
xx
x
x
ui
.LL-
X
.4 fR
-
-
x
-8
-J
x
x
x
x
_____
__.
L.V
__,__
-
,
a.V.
(4
140
FRAME #
155
150
145
C+5100)
30* CW
NICOLLIER
160
166
-V.AX/VXS
VUJSIOK
I TEST 32- FiB-SO L3:05.40 PICTIt-PI.02
6
VAL'VMS
-
5
4.[
x
x
3
C
%0
X
Lo
z
1-
1
x
X
2
X
x
x
0
-
X
X
LUJ
X X
X
-1
-2 I-
i
ON/ I
15
20
rl\I
-3
5
3
FRAME #
10
C+7000)
2
5
30 CW
C. OMAN
LU
-7
xx x
-e
-9
-10
x
-11
LU
-12
x
x
LUi
-13
~xx
X
-14
LU
LUJ
-15
XX
-
xL1_I
L-
-16
0
5
FRAME # C+7000)
20
15
10
C. OMAN
30 CW
25
r
167
- VAX/VMS
VERSION I TEST 12-FEB-80 13:06:22 PICTR-P.oT4
7
6
x
5
x-
x
4
x
x
-ij
3
z
2
x
x
-
x
x
x
x
x
x
Ix
x
x
x
x
x
1
4)"V
e?
25
30
FRAME # C+7000)
AWv
35
C. OMAN
40
I
4 75
45 CW
-e
-9
x
x
x
-10
-x
-11
xx
-x
C
x
uLJ
-12
x
x
x
x
x
x
z
-13
-14
x
6-
x
qv
LL
I
It
20
25
FRAME # C+7000)
40
35
30
C. OMAN
45 CW
45
168
VAX/VMS
VERSION
1 TEST
12-FEB-80 13:06:53 PICTR-PLOTS
VAX/VMS
5
I
II
I
xx
4
3
2
x
,-
I
9
0
Lo
LU
-J
x
x
x
X
x
x
x
x
x
-1
x
x
z
x
-2-3
V
40
45
x
I\N,
LNV
50
FRAME # C+7000)
I)v
55
C. OMAN
60
65
45 CCW
-9
-10
-11
-12
x
Lo
u
x
-x -x
-13
xx
x
LU
-15
U
-16
z
LU
x
V
-14
.
x
xX
-
x
x
X
x
-
-17
t1
I-
-19
40
45
FRAME # C+7000)
60
55
50
C. OMAN
45 CCW
65
169
VAX/VXS
VEMSION 1 TEST 12-FEB-90 13:20:42 PICTR-PLOT4
VAX/V)S
5
4
X
3
I
x
x
X
X
x
xx
x
x
xxx
LU
xx
2
x
LU
z
LU
x
,NX
X
XW
1
x
x
Lo
xo
X
X
0
H
FRAME # C+7000)
e5
60
75
70
65
0
60 CCW
C. OMAN
- c
x
-
-10 -
X
Xx
-11 -
x
x
x x
x
X
X
Lo
C
x
x
-12-
%-W
x
ui
ID
z
-13-
X
X
LUJ
LUI
IL
-J
-14
,NV
-15
60
65
,
J
70
FRAME # C+7000)
V
- ,I
80
75
C. OMAN
60 CCW
85
170
I
.
VAX/VNS
VERSIOM I TEST
VAX/V)~S
ICTR-PLOTS
6-MAR-80 12:14:11
~
8
7
I
6
x
-(
5
x
(-I
Ln
z
4
x
xXxXX
)
xx
3
x
x
x
-
X
Lu
2
Lo
xx
NI
-_
_
_
_
x
1
_X
X
1
0
90
98
96
94
92
C+7000)
FRAME #
100
104
102
10E
30 CCW
C. OMAN
-6
-7
-8
X
-910
LL
-11 -
X
x
xX
LUJ
-j
x
-'23
W
x
,
/
,
x
,n\
t
-14
90
92
94
96
FRAME # +C7000)
98
C.,OMAN
100
102
30 CCW
104
106
I
I
171
.
VAX/VMS
VERSION I TEST
VAX/VMS
6-MAR -80 12: 16:35 PICTR-PLOTS
7
X
6
- x
5
x
4
-X
3)
LJ
-j
Lo
-
x
x
x x
x
x
x
2
z
uLJ
1
Lo
0
x
x
x
x
-1
H
cy
MNV
-2
5
II
W
f
115
110
FRAME #
AI
C. OMAN
C+7000)
I 30
125
120
60 CW
-5
-6 -7
-8
0"
0)
LU
-9
x
-
-0
-10
Xx
-11i
Lo
H
-12
x
x
X
x
x
X
x
x
x
LU
uJ
-j
-13
-14V
105
110
115
FRAME # +(7000)
120
C. OMAN
60 CW
125
130
172
. VAX/VMS
VERSION I TEST
6-MAR-80 12:17:28 PICTR-PLOTI
VAX/V)S
14
x
12
x
X
10
x
x
x
xX
-x
z
64
x
x
x
x
x
-
LU
X
LU
x
X
4
I
-
H
X
2
150
P. RICH
FRAME # C+7000)
22
I
20
I-,
JL
170
I
30 CW
I
x
1
x
x
x
r"
1
165
160
155
24
~
x
le -
x
x
X
Lo
X
X
X
z
LU
LU
LL
U
-J
14 H x
12 H
10
150
NV,
N~v?
160
155
FRAME #
C+7000)
P. RICH
I
165
30 CW
V
I
170
173
. VAX/VMS
VERSION I TEST
VAX/VMS
6-MAR-80 12:19:21 PICTR-PLOT3
-6
x
-7
x
x
x
x
x x
x
-9
9-l
x
x
Ld
-
x
-10-
x
-j
Lo
z
-11 -
LU
x
x
xx
-12 -
LUJ
x
-13-
,NJV
-14
"I
210
205
200
195
190
P. RICH
FRAME # C+7000)
215
45 CW
It
16
15
0"
a'
LU
14
F
13
I-
12
-J
z
x
xx
x
x
x
x
x
x x
x x x
x
x
x
11
10 1-
x
U-
9
e
190
~1~
I/NVI/
195
FRAME #
200
(+7000)
210
205
P. RICH
45 CW
215
174
VAX/VMS
VERSION 1 TEST
VAX/VMS
6-MAR-80 12:20:23 PICTR-PLOT4
-3
Ir
I
I
x
-4
-5-6-
Ld
x
x
-7
x
-8
x
z
x
x
x
-9 LU
x
x
-4
-11-
x
xV
12
225
220
215
2.10
FRAME # C+7000)
I
-
X
-10'x
(~
H
x
x
LUI
P. RICH
i
230
2335
230
23135
60 CW
18
17
16
-x
15
13
-
-x
14
-J
Lo
Xx
-x
xx
x
xx
-
z
12
LU
.
LL
LJ
-i
11
10
-
x
x
x
x
xx
- x
____
____
____
_
J
\L
x
9
2 10
215
FRAME #
220
C+7000)
225
P. RICH
60 CW
175
. VAX/VMS
VERSION 1 TEST
6-MAR-80 12:21:30
VAX/VXS
PICTR-PLOTS
10
X
X
XXX
G
x
XX
6
z
4
x
X
x
xX
2
H
0
230
6 4.. ,4
\0V
vV
V
_
235
240
250
245
FRAME # C+7000)
P. RICH
255
30 CCW
1
14
XXX
12
cn
*0
X
X X
XX
X
x x
X
10
X
x
X
x
z
X
Li
6
L
I
fH~
_
_
_
fb
4
230
235
FRAME #
240
(+7000)
245
P. RICH
250
30 CCW
255
176
. VAX/VMS
VERSION I TEST
VAX/VMS
6-MAR-80 12:22:30 PICTR-PLOT6
9
x
8:
7
x
-
6
0o
5
-
x
xx
x
x
u
4
x
z
uJ
uJ
x
3
2
x
I
crf
x
NJv
0
254
-
t
VW
1
260
258
256
x
FRAME # C+7000)
264
262
268
266
270
60 CCW
P. RICH
15
14
13
x
12-
X
x
x
C)
z
10
Li
9
xx
x
11
Lu
-J
-
x
.
.
x
Lu
LL
Lu
-j
8
x
7
6
254
t
256
258
FRAME #
260
C+7000)
292
264
P. RICH
26G
60 CCW
268
270
177
VAX/VNiS ***
VERSION I TEST
4-APR-89 15:11:25 PICTR-PLOT1
*** VAX/VMS
14
_SIAO: (3441.ARROTT.OCRIVARIAN.PLT;
7
I
x
6
*1
x
5
x
4
3
x
Lo
z
x
x xj
x
x
2H
x
x
x
I
w
K
x
x
x
0 h
H'
4
*1t
-1
x
AV(
-2
t
KfAt
30
25
35
FRAME #
C+7400)
)V/
40
T. STEPHENS
-1.
45
30 CW
30
29
x
x
28
x
X
27
r"
26
-J
LU
LU
x
25
xx
x
X
x
24
-I
x
x
23
x
LU
-
22
-
21'
25
tV
Ai
NA!
35
30
FRAME #
C+7400)
T. STEPHENS
I
40
nv
30 cw
- Z
178
VAX/VMS
*
1 TEST
VERSION
1S:11:57
4-APR-90
PICTR-PLOT2
*
_SIAO:CP3441.ARROTT.OCR]VARIAN.PLT;I5
VAX/VMS
14
x
12
x
x
Xx
x
x
X
10
x
C"
x
x
<
2
X
(3
uj 4
x
x
Lo
1
S 2-
Nv
x
0
FRAME #
70
55
60
65
C+7400)
T. STEPHENS
45 CCW
50
45
32
30
X
2e
xx
26
x
24 -
x
x
Lox
z
x
<x
22 -
-
20 18
45
N
50
FRAME #
55
60
65
C+7400)
T. STEPHENS
45 CCW
...
179
VAX/VUS
-*
VERSION 1 TEST
4-APR-80 IS: 12:32 PICTR-PLOT3
*** VAX/V)IS
.SIAO:(P3441.ARROTT.OCRIVARIAN.PLT;16
17
x
-
16
x
15
13 -
uj
j
x
14
z
x
X x
LUI
Ld
x
x
x
x
x
X
I-
10
9
. it
x
x
H
x
'V
I
E
x
'WI
75
60
65
C+7400)
T. STEPHENS
60 CW
70
FRAME #
3
30
x
29
28
x
x
x
x
27
x
x
26
x
-x
x
01
Lo
z
25
-x
LL
Ld
-j
-
24
3
LUJ
Ld
-
x
23
X
-
22
tV
65
70
FRAME #
r
.
LNL
75
00
85
C+7400)
T. STEPHENS
60 CW
180
VAX/VMS
**
VERSION
I TEST 4-APR-80 LS:13:06
PICTR-PLT4
.SIAO:
P3441.ARROTT.OCRIVARIA.4.PLT;17
*** VAX/VMS
18
- - - - - - - - - -- -
x
x
x
14.
x
I
U
12f
z
Ld
x
x
x
x
10 x
U
x
x
x
x
x
H
x
x
x
a -
4
x
r_
65
I
,
.
ANl4
90
I
ix
1-
1
li
19 IV
95
FRAME #
100
T. STEPHENS
C+7400)
I
~
105
110
45 CW
30
x
x
26
x
26
x
x
24
x
x
xx
x
x
x
x
xx
24-
Ld
22
LL
LU
20
-1
18
85
90
FRAME #
95
100
105
C+7400)
T. STEPHENS
45 CW
KA
110
181
*O* VAX/VMS
VAX/VMS ** PEPLOT 2.0
4-APR-80 15:13:43 .SZAI:SYSNEAL.PLOT.WORX)VARIAN.PLT;7
.SIAO:1P3441.ARROTT.OCRIVARIAN.PLT;18
VAX/VMS **4VERSION 1 TEST 4-APR-88 15:14:00 FICTR-PLOTS
0
VAX/VMS
14
-
*
13 I
*
12
xx
x
10
x
x
x
x
x
X
0D
z
LUJ
9 -
LUJ
e
CD
7
x
x
x
-j
x
x
Xx
x
X
Ny
x
X1
x
6h
S
105
I
FRAME #
27
120
115
110
C+7400)
Ii
I
W
~1
125
130
T. STEPHENS
30 CCW
I
t
135
I
I
26 x
x
XX
25 -
x
24 -
*
x
23
F*
U
z
~1
X
0)
22 -
x
X
x
x
21-
Xx
20 Li.
LU
-j
SxX
x
19
.v -
1e
105
110
FRAME #
I
115
C+7400)
N.V
120
I
1
IN~
0 1
I
125
130
T. STEPHENS
30 CCW
f'
182
VAX/VfS
VERSION
VAX/VMS
1 TEST 6-MAR-80 12:23:18 PICTR-PLOT7
14
xx
x
12
x
10
-a
B
x
xx
z
wU
x
x
-
6
LU
LO
4
x
x
2
550
'IN W
555
\
565
560
575
570
45 CW
C. PANE
FRAME # C+7000)
10
, Ov
I
I
I
a
x
x
0,I
Sn
x
LU
IJ
x
4
-L
z
x x
X
x
x
LU
2
X X
LU
-j
*1
x
x
x
x
LUI
1L
x
xx
x
0
-2
550
N
N
555
FRAME #
I
560
C+7000)
1-
565
C. PANE
_v
I
I
570
45 CW
Nv
I
~1~
575
183
a VAX/VMS
VERSION
1 TEST
10-MAR-80
12:00:54 PICTR-PLOT4
VAX/VMS
9
-
x
-
S
xx
xx
x
r"
7
x
x*
x
x
xx
x
-J
z
6
LUJ
x
xxx
x
xx
x-
-
>-
LU
I
In
5
I
4
140
135
FRAME #
C+7500)
I
I
I
5
150
145
160
155
30 CW
C. PANE
I
I
I
4
x
3'
x
x
.J
uj
I
z
x
2
LU
x
LJ
LL
LUI
-t
x
-
1
t\I
I
135
140
FRAME #
145
C+7500)
D5
xJ
150
C. PANE
155
30 CW
xA
160
184
VAX/VMS
VERSION 1 FST 10-MAR-80
VAX/VHIS
12:01:24 PICTR-PLOTS
e
xX
7
r-J
x
-
x
x
6
x
x
C)
z
xx
5
uJ
Li
70D
X
4
XIXIV
x
x
xv
3
155
160
FRAME #
170
165
C+7500)
C. PANE
4
w
__
175
80
45 CCW
X
x
3
x
Xx
X
2
LUJ
1
X
xx
-
LUJ
U-
0 H
x
x
-
Lu
T
Ij
-1
155
160
FRAME #
165
C+7500)
170
C. PANE
175
45 CCW
180
185
. VAX/V.S
VAXVIS
VERSION 1 TEMT 10-MAR-80 11:58:S2 PICTR-PLOTI
I
I
I
I
*II
x
10
x
9
6
U-'
7
U
x
x
z
x
x
x
x
x
6-
LU
Ld
x
x
5
L-
x
x
4
3
80
r\JNI
I I1w
FRAME #
1)N
I
C+7500)
92
90
88
86
84
82
C. PANE
-
94
96
60 CW
7
6
5
xx
4
LU
z
xx
Xx
3
2
x
x
LU
LUL
x
1
x
x
0
-1 80
xv
82
84
86
FRAME # C+7500)
88
C. PANE
90
92
60 Cw
94
96
186
VAX/VMS
VERSION 1 TET 10-MAR-80 11:59:33 PlCTR-PLOT2
VAX/VMS
10
x
I-
7
x
x~
LU
z
x
6 X
LU
X
x
X
x
5
LU
x
H
Iy
4
I
\/
))V
-x
x
O
x
3
100
95
105
FRAME #
110
115
C. PANE
C+7500)
120
30 CCW
6
5
x
4
x
x
x x
x
X
x
L
-
LU
x
x
-
xx
-J
I3
x
x
0
x
T
x
x
_JA~L1-
I'
-1
95
100
FRAME #
105
C+7500)
110
C. PANE
115
30 CCW
120
187
VAX/VXS
VERSION 1 TEST 10-MAR-80 12:00:12 PICTR-PLOT3
VAX/VMS
11
10
9-X
x
S
-o
-J
XX
X
x
7
XX
X
z
LU
X
XX
6 Xx
uJ
I-
Lo
r\V xII
INN
4
3
115
125
120
FRAME #
C+7500)
130
135
C. PANE
140
60 CCW
6
X
X
5|
x
x
4
r"
Li
3
Xx
-(
X
x
2
-J
-L
z
XX
-x
LU
0
Lx
IXX
I
X
-1
-
-
-2
115
120
FRAME #
125
C+7500)
130
C. PANE
135
60 CCW
T
140
188
VAX/VKS
VERSION 1 TEST 10-MAR-80 12:02:33 PICTR-PLOTI
VAX/VMS
-7
-7
x
-8 -
X
x
x
-9 -
x
,
r"
x
-10
w
x
x
x
-o
Lo
x
-11
z
x
xx
-12 I-
LU
Lo
13 1-
H-
x
x
NI'X
Of
-14 L
190
195
205
200
FRAME # C+7500)
T. CRITES
210
45 CW
0
x
x
x
-x
-2
x
x
X
-4
-
xx
x
-"
x
xx
-6
-x
LU
z
-8
x
x.
Lu
LU
-10
AI
190
xx
I v vi
,
.
200
195
FRAME #
1
C+7500)
T. CRITES
205
45 CW
210
189
IAX/VXS
VERSION I TET 10-MAR-80 12:03:OS PICTR-PLOT2
-6
VAX/VMS
x
x
X x
x X
x
-8
x
x
x
x
-10
xx
x
-
xx
-x
x
x
0,
xx
-12
Lo
x-
z
Lu
-14
Lo
H
CD
x
-16
210
215
x
1'
\
225
220
FRAME # C+7500)
V,,
f
235
230
60 CCW
T. CRITES
11
4
x
x
x
0
x
-2
ILo
x
-4
-6LUL
-8
x x
x
x
x
X
x x
X
x
-10
-12
210
220 x
215
FRAME #
220
C+7500)
i
22
T. CRITES
v
,
2:
r
60 CCW
T1
5
190
. VAX/VXS
VEMSION I TEST 10-MAR-80
11:57:10 PICTR-PLOTJ
VAX/%..S
-3
-4
-5
-7
-8
ci,
w
-9
-10-
x
-
LO
X
IX
-12
234
236
238
240
244
242
FRAME # (+7500)
246
T. CRITES
248
250
252
2 54
45 CCW
9
X
7
6
X
0i
.1 LO
4-X
z
3
U
L
Lli
2
X
X
X
X
x
L
0
234
X
x
1
X
236
238
240
FRAME #
242
(+7500)
244
246
T. CRITES
248
250
252
254
45 CCW
i
191
. VAX/VMS
VERSION 1 TEST 27-MAR-80
VAX/VXS
IS:50:24 PICTR-PLOTI
vi
4
x
3
x
2
I-
-o
z
Lo
H
(I
0
x
x
x
x
x
le
xx
x
-1
x
x
x
x
x x
-21I adm*
-3
44jvv
0 1\1
1
55
60
65
FRAME #
7
70
C+7700)
75
T. CRITES
e0
30 CW
-
-
6
x
5
-0
LU
z
x
4
x
3
x
2
LUL
-
1
0
55
x
x
60
FRAME #
$
65
C+7700)
70
T. CRITES
75
30 CW
80
192
VAX/VMS
VERSION 1 TEST 27-MAR-80
VAXVXS
15:50:54 PICTR-PLOT2
M
b
x
x
4
x
r"
2
xx
x
x
L-j
0
(3
Sxxx
z
LUI
LJ
x
xxxx
x
x
x
-21
x
L-
x
-4
, su
- -1
-6
4 j
-
--
-
I
-
-
I
n,).
,
90
95
I
Ii
$
\
I
105
100
60 CW
T. CRITES
C+7700)
FRAME #
I
I
u
e5
80
75
,.
V-
x
6
x
x
x
x
4
x
x
2
U
x
z
LUI
0
x
x
x
xx
x
*
x
x
X
x
x
x
x
LUJ
LL
LUI
-2
IJ
0\
-4
75
80
FRAME #
85
C+7700)
90
x
95
T. CRITES
I
100
60 CW
105
193
REFERENCES
Arrott, A.P., 1979, "Parabolic flight experiments, Winter 1979",
MIT Man Vehicle Laboratory,
Unpublished.
Brandt, T., Dichgans, J. and Koenig, E.,
"Differential effects of
central versus peripheral vision on egocentric and exocentric
motion perception", Exp Brain Res 16:476-491, 1973.
Brandt,
T.,
Wist,
E.,
and Dichgans,
J.,
"Foreground and background
in dynamic spatial orientation", Perception and Psychophysics
17(5):497-503,
Diamond,
1975.
S., Markham,
C.,
Simpson,
N.
and Curthoys,
I.,
"Binocular
counterrolling in humans during dynamic rotation", Reed Neurological Research Center, UCLA School of Medicine, August 1978.
Dichgans, J. and Brandt, T., "The psychophysics of visually induced
perception of self motion", The Neurosciences, MIT Press, Cambridge, 1973.
Dichgans, J. and Brandt, T.,
"Visual vestibular interaction:
effects
of self motion perception and postural control", Perception,
Chapter 25, Handbook of Sensory Physiology, Vol. VIII, Edited by
R. Held, H. Leibowitz, and H. Teuber, 1978.
Dichgans, J., Held, R., Young, L. and Brandt, T.,
"Moving visual scenes
influence the apparent direction of gravity", Science 178:1217-
1219, 1972.
Dichgans, J., Wist, E.R., Diener, H.C. and Brandt, T.,
Fleischl phenomenon:
"The Aubert
A temporary frequency effect on perceived
velocity in afferent motion perception", Exp Brain Res 23:529-533,
1975.
194
Diener, H.C., Wist, E.R., Dichgans, J. and Brandt, T.,
"The spatial
frequency effect on perceived velocity", Vision Res 16:169-179,
1976.
Edelman, E.R., Video Based Monitoring of Torsional Eye Movements,
S.M. Thesis, MIT, June 1979.
Finke, R. and Held, R., "State reversals of optically induced tilt
and torsional eye movements", Perception and Psychophysics 23(4):
337-340, 1978.
Fluur, E.,
"A comparison between subjective and objective recording
of ocular counterrolling as a result of tilting", Acta Otol 79:
111-114, 1975.
Graybiel, A.,
"Predicting the susceptibility to vestibular sickness
under the conditions of weightlessness", Naval School of Aviation
Medicine Report, 1964.
Graybiel, A.,
"Vestibular problems in prolonged manned space flight",
Vestibular Symposium, Barany Society, Uppsala, Sweden, May 1968.
Graybiel, A., Prevention and treatment of space sickness in ShuttleOrbiter missions", Aviat Space Environ Med 50, 1979.
Graybiel, A. and Woellner, R.,
"A new objective method for measuring
ocular torsion", American J Ophthalmol 47(3), 1959.
Guedry, F.E. and Graybiel, A.,
"Compensatory nystagmus conditioned
during adaptation to living in a rotating room", J Appl Physiol
17:398-404, 1962.
Held, R., Dichgans, J. and Bauer, J.,
"Characteristics of moving visual
scenes influencing spatial orientation", Vis Res 15:357-365, 1975.
195
Howard, I.P. and Templeton, W.,
Human Spatial Orientation, New York:
Wiley, 1966.
Huang, J.K., Visual Field Influence on Motion Sensation in Yaw and
and On Manual Roll Stabilization, M.S. Thesis, MIT, June, 1979
Lestienne, F.,
Soechting, J. and Berthoz, A., "Postural readjustments
induced by linear motion of visual scenes", Exp Brain Res 28:363-
384, 1977.
Lichtenberg, B.K., Ocular Counterrolling
induced Ti: Hamans byHori-
zontal Accelerations' Sc.D. Thesis, MIT, June 1979.
Melvill Jones, G.,
"Interactions between optokinetic and vestibulo-
ocular responses during.head rotation in various planes",
Aerosp
Med 37, 1966.
Melvill Jones, G.,
"The functional significance of semicircular canal
size", Chapter 2.
Melvill Jones, G., "Predominance of anticompensatory oculomotor response during rapid head rotation", Aerosp Med, October 1964.
Melvill Jones, G., "Dynamic cross-coupling in the semicircular canals",
Recent Advances in Aerospace Medicine 235-248, 1970.
Merker, B. and R. Held, "Comparison of eye torsion with the apparent
horizontal under thead tilt and visual field rotation", Presented
at the Eastern Psychological Association, April 1977.
Miller, E.F., "Counterrolling of human eyes produced by head tilt
with respect to gravity", Acta Otolaryng 54:479-501, 1962.
Miller, E.F. et al., "Otolith organ activity within earth standard,
one half standard and zero g environments, Aerosp Med 37:399-403,
1966.
196
I Graybiel, A., "Otolith function as measured by ocular
.ing",
The Role of the Vestibular Organs in Space Ex-
NASA, 1965.
Graybiel, A., "Effect of gravitoinertial force on
terrolling", J Appl Physiol 31(5), 1971.
aybiel, A., Kellogg, R. and O'Donnell, R.,
"Motion
-ceptibility under weightlessness and hypergravity
;enerated by parabolic flight", Aerosp Med 40(8):862-
Brand, J.J., Motion Sickness, Academic Press, 1975.
aic Stimulation and Perception of Motion, S.M. Thesis,
70.
.vill Jones, G., Mammalian Vestibular Physiology,
New York, 1979.
H., Dichgans, J. and Brandt, T.,
the perceived speed of self motion:
:eption and Psychophysics 17(6),
R.,
"Perceived
Linear vs
1975.
"Eye torsion and visual tilt are mediated by
icular processes", Vision Res 19:917-919, 1979.
C.M. and Dichgans, J.,
"Influence of head orienta-
ly induced pitch and roll sensations", Aviat Space
:264-268, 1975.
is, J., Murphy, R. and Brandt, T.,
"Interaction of
vestibular stimuli in motion perception", Acta
-31, 1973.
197
Young, L.R.,
"Dynamic control models of the semicircular canals"
Automatica 5, 1969.
Young, L.R. and Oman, C.M., "Model for vestibular adaptation to
horizontal rotation", Aerosp Med 40:98-103, 1969.
Young, L.R. and Oman, C.M.,
"Influence of head position and field on
visually induced motion", The Proceedings of the Tenth Annual
Conference on Manual Control, Wright Patterson AFB, 1974.
Zacharias, G.L., Motion Sensation Dependence on Visual and Vestibular
Cues, Ph.D. Thesis, MIT, September 1977.
Experiment Requirements Document, "Vestibular Experiments In SL-l"
April 1977, Center for Space Research, MIT.
Dictionary of Visual Science, 2nd Edition, Editors: Shapiro, M.,
and Hofstetter, H.,
Cline, M.,
Chilton Book Company, Pennsylvania, 1968.