Document 10859713
advertisement

Hindawi Publishing Corporation
International Journal of Combinatorics
Volume 2012, Article ID 908356, 18 pages
doi:10.1155/2012/908356
Research Article
A Convex Relaxation Bound for
Subgraph Isomorphism
Christian Schellewald
Independent Research, 7052 Trondheim, Tyholtveien 68, Norway
Correspondence should be addressed to Christian Schellewald, christian.schellewald@gmail.com
Received 31 August 2011; Accepted 27 December 2011
Academic Editor: Liying Kang
Copyright q 2012 Christian Schellewald. This is an open access article distributed under the
Creative Commons Attribution License, which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly cited.
In this work a convex relaxation of a subgraph isomorphism problem is proposed, which leads to a
new lower bound that can provide a proof that a subgraph isomorphism between two graphs can
not be found. The bound is based on a semidefinite programming relaxation of a combinatorial
optimisation formulation for subgraph isomorphism and is explained in detail. We consider
subgraph isomorphism problem instances of simple graphs which means that only the structural
information of the two graphs is exploited and other information that might be available e.g.,
node positions is ignored. The bound is based on the fact that a subgraph isomorphism always
leads to zero as lowest possible optimal objective value in the combinatorial problem formulation.
Therefore, for problem instances with a lower bound that is larger than zero this represents a
proof that a subgraph isomorphism can not exist. But note that conversely, a negative lower bound
does not imply that a subgraph isomorphism must be present and only indicates that a subgraph
isomorphism can not be excluded. In addition, the relation of our approach and the reformulation
of the largest common subgraph problem into a maximum clique problem is discussed.
1. Introduction
The subgraph isomorphism problem is a well-known combinatorial optimization problem
and often involves the problem of finding the appropriate matching too. It is also of particular
interest in computer vision where it can be exploited to recognise objects. For example, if an
object in an image is represented by a graph, the object could be identified as subgraph within
a possibly larger scene graph. Several approaches have been proposed to tackle the subgraph
isomorphism problem and we refer to a few 1–4 and their references therein.
Error-correcting graph matching 5—also known as error-tolerant graph matching—is
a general approach to calculate an assignment between the nodes of two graphs. It is based on
the minimisation of graph edit costs which result from some predefined edit operations when
one graph is turned exactly into the other. Commonly introduced graph edit operations are
deletion, insertion, and substitution of nodes and edges. Each graph-edit operation has a cost
2
International Journal of Combinatorics
assigned to it which is application dependent. The minimal graph edit cost defines the socalled edit distance between two graphs. The idea to define such a distance for graph matching
goes back to Sanfeliu and Fu 6 in 1983. Before that, the edit distance was mainly used for
string matching. Several approaches for error correcting graph matching have been proposed
that are based on different methods like tree search 3, genetic algorithms 7, and others see
e.g., 5 to name a few. In this paper we propose and apply a semidefinite programming
SDP relaxation to a quadratic optimization formulation for subgraph isomorphism. In
combinatorial optimization, semidefinite programming represents a valuable approach to
approximate NP-hard problems and to obtain bounds for these problems. The current
increase of interest in semidefinite programming is largely driven by the successful extension
of interior point algorithms for linear programming to semidefinite programming see e.g.,
8. A well-known example for semidefinite programming is the MAX-CUT approximation
by Goemans and Williamson 9. With the increase of the computational power of computers, SDP turned out to be useful for an increasing range of real world problems. For
example, it was applied to several problems in the field of computer vision including
segmentation/partitioning, grouping, restoration 10 matching 11, graph seriation 12,
and camera calibration 13.
2. Contribution and Aim of the Paper
The main contribution of this paper lies in the convex relaxation of a subgraph isomorphism
problem and the identification of a lower bound for this optimization problem. The computation of that bound is based on the SDP approximation of a combinatorial optimization
formulation for subgraph isomorphism. The combinatorial optimization formulation and
its convex relaxation is explained in detail. The approach is designed to find a subgraph
isomorphism which maps the entire node-set of the possibly smaller graph to a subset of
nodes in the second graph. We also discuss an interesting relation to an approach that is based
on a reformulation of the largest common subgraph problem into a largest clique problem
14, 15.
3. Organisation of the Paper
After providing the notation we use, we introduce a combinatorial quadratic optimization
formulation for the subgraph isomorphism problem that can be interpreted as an errorcorrecting graph matching approach.
The integer optimization problem we end up with is generally an indefinite quadratic
integer optimization problem which is known to be NP-hard 16 as Pardalos and Vavasis
showed that indefinite quadratic programs are NP-hard problems see 17. Then we explain
in detail a convex SDP relaxation of the combinatorial problem that leads to a lower bound for
the subgraph isomorphism problem. The bound can be computed with standard methods for
semidefinite programs see, e.g., 18–20. Finally, our experiments show that the bound can
be tight enough to prove that no subgraph isomorphism between two graphs can be found.
4. Preliminaries
In this paper, we consider simple graphs G V, E with nodes V {1, . . . , n} and edges
E ⊂ V × V . We denote the first possibly smaller graph with GK and the second graph with
International Journal of Combinatorics
3
GL . The corresponding sets VK and VL contain K |VK | and L |VL | nodes, respectively. We
assume that L ≥ K, which is in fact no constraint as we can always choose GL to represent the
larger graph. We make extensive use of the direct product C A ⊗ B, which is also known as
Kronecker product 21. It is the product of every matrix element Aij of A ∈ IRn×m with the
whole matrix B ∈ IRp×q resulting in the larger matrix C ∈ IRnp×mq .
A subgraph isomorphism is a mapping m : VK → V ⊂ VL of all nodes in the graph GK
to a subset V of VL with K nodes of the graph GL such that the structure is preserved. That
means that any two nodes i and j from GK that are adjacent must be mapped to nodes mi
and mj in GL that are adjacent too. If the nodes i and j in GK are not adjacent they must
be mapped to nonadjacent nodes in GL . The same has to be true for the inverse mapping
m−1 : V → VK which maps the nodes V of the subgraph to the nodes VK of GK .
5. Combinatorial Objective Function
In this section we propose and show the correctness of a combinatorial problem formulation
for finding a subgraph isomorphism. The general idea is to find a bipartite matching between
the set of nodes from the smaller graph to a subset of nodes of the larger graph. The matching
is evaluated by an objective function that can be interpreted as a comparison of the structure
between all possible node pairs in the first graph and the structure of the node pairs to which
the nodes are matched in the second graph. A matching that leads to no structural differences
has no costs and represents a subgraph isomorphism. Mathematically, the evaluation can be
where x ∈ IRKL resents a mapping and
formulated as a quadratic objective function x Qx,
KL×KL
∈ IR
contains the problem data of the subgraph isomorphism problem. The full task
Q
of finding a subgraph isomorphism can be stated as the following combinatorial quadratic
optimization problem, which details are explained below:
min
x
x Qx,
s.t. AK x eK ,
5.1
AL x ≤ e L ,
x ∈ {0, 1}
KL
.
The constraints make use of the matrices AK IK ⊗ eL ∈ IRK×KL and AL eK
⊗
L×KL
and ensure that the vector x is a binary 0,1-indicator vector which represents a
IL ∈ IR
bipartite matching between the two node sets of the graphs such that each node in graph GK
has a single partner in the graph GL . Here en ∈ IRn represents a vector with all elements 1. For
our purposes, the elements of the indicator vector x ∈ {0, 1}KL are arranged in the following
order:
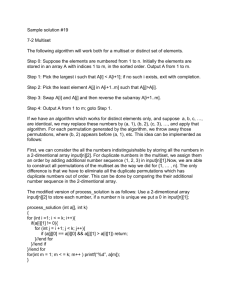
x x11 , . . . , xL1 , x12 , . . . , xL2 , . . . , x1K , . . . , xLK .
5.2
Using double indices a nonzero vector element xji 1 indicates that the node i of the
first set of nodes VK is matched to the node j in the second set VL and otherwise xji 0. We
illustrate such an indicator vector in Figure 1 where a bipartite matching between two small
4
International Journal of Combinatorics
1
5
1
3
2
1
2
3
0
4
T
(0 1 0 0 0 1 0 0 0 0 0 0 0 1 0 )
Figure 1: An illustration of the 0,1-indicator vector with K 3 and L 5. The right side shows the
indicator vector representation of the particular bipartite matching which is shown on the left hand side
of this figure. For each of the K 3 mappings the vector contains exactly a single “1” within each of the K
consecutive partitions with L 5 elements.
sets of nodes and the corresponding indicator vector is shown. Note that for K 3 and L 5
the corresponding constraint matrices become
⎛
1
AK ⎝0
0
⎛
1
⎜0
⎜
⎜
AL ⎜0
⎜
⎝0
0
⎞
1 1 1 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 1 1 1 1 0 0 0 0 0⎠,
0 0 0 0 0 0 0 0 0 1 1 1 1 1
⎞
0 0 0 0 1 0 0 0 0 1 0 0 0 0
1 0 0 0 0 1 0 0 0 0 1 0 0 0⎟
⎟
⎟
0 1 0 0 0 0 1 0 0 0 0 1 0 0⎟.
⎟
0 0 1 0 0 0 0 1 0 0 0 0 1 0⎠
0 0 0 1 0 0 0 0 1 0 0 0 0 1
5.3
which contains the structural information of the graphs
The relational structure matrix Q
and appears within the objective function of the optimization problem 5.1 can be written in
a form that exploits the Kronecker product.
Definition 5.1. Relational Structure Matrix:
NK ⊗ N L N K ⊗ NL .
Q
5.4
Here NK and NL are the 0,1-adjacency matrices of the two graphs GK and GL . The matrices
N K and N L represent the complementary adjacency matrices which are computed as the
following.
Definition 5.2. Complementary Adjacency Matrices
N L ELL − NL − IL ,
N K EKK − NK − IK .
5.5
Here Enn ∈ IRn×n are matrices with all elements equal to one and In ∈ IRn×n denotes the unit
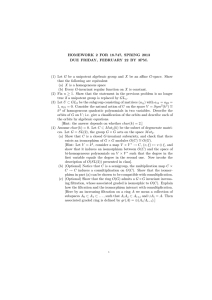
matrix. The complementary adjacency matrices have elements Nij 1 if the corresponding
nodes i and j are not directly connected in the graph. To illustrate that, the adjacency matrix
NK for a small graph along with its complementary adjacency matrix are shown in Figure 2.
There, the matrices are represented as a binary image 0 black, 1 white.
We show this as similar representations will be used to illustrate some particular
matrices that appear later in this paper.
International Journal of Combinatorics
3
2
3
1
4
5
2
1
NK =
4
5
NK =
5
Figure 2: An example graph and its adjacency matrix NK along with its complementary counterpart N K .
The matrices are represented as an appropriate binary image 0 black, 1 white.
5.1. Subgraph Isomorphism
In the following, we show that a 0,1-solution vector x∗ of the optimization problem 5.1
that has an optimal objective value of zero represents a subgraph isomorphism. The matrix
is defined by 5.4. We first show that zero is the smallest possible value of the integer
Q
optimization problem. Then we show that every deviation from a subgraph isomorphism
results in an objective value larger than 0, meaning that an objective value of zero represents
a subgraph isomorphism.
Proposition 5.3. The minimal value of the combinatorial optimization problem 5.1 is zero.
and x are all nonnegative. In fact all their elements are either zero
Proof. The elements of Q
or one. Therefore, the lowest possible value of the quadratic cost term which can be rewritten
as the following sum:
x NK ⊗ N L N K ⊗ NL x
x Qx
K,L K,L N K NL rs xra xsb
NK ab N L
rs
ab
a,r b,s 5.6
ra,sb
Q
is zero.
Proposition 5.4. A solution with the minimal value of zero of the quadratic optimization problem
5.1 represents a subgraph isomorphism.
ra,sb xra xsb within the sum of 5.6
In order to prove this we look closer at the term Q
and show that it leads to a cost larger than 0 only if the considered matching violates the
condition for a subgraph isomorphism.
Proof. Due to the constraints, x represents a bipartite matching and only if the product xra xsb
ra,sb is equal to one can the term within the sum 5.6 be different from zero, and Q
ra,sb also as
NK ab N L rs N K ab NL rs has to be considered in detail. We refer to Q
structure comparison term. There are the following two cases that lead to xra xsb 1 in the
sum 5.6.
Case A. The node a and node b refer to the same node in GK meaning that a b. As the
diagonals of NK and N K are zero, one finds that NK aa 0 and N K aa 0. Then the term
NK aa N L rs N K aa NL rs xra xsa is always equal to zero and does not contribute to the
sum.
6
International Journal of Combinatorics
Table 1: List of all outcomes of the structure comparison term when two different nodes a and b of graph
GK are mapped to two different nodes r and s in the second graph GL . The first column describes the
relation between the concerned nodes and the last column shows the associated cost NK ab N L rs N K ab NL rs . Only in cases I and IV is the structure preserved and can lead to an isomorphism. No cost
is added in this cases. The other cases II and III do not preserve the structure and result in a total cost
larger than 0. For details see the text.
Node configurations
I: a,b adjacent; r,s adjacent
II: a,b adjacent; r,s not adjacent
III: a,b not adjacent; r,s adjacent
IV: a,b not adjacent; r,s not adjacent
NK ab
1
1
0
0
N L rs
0
1
0
1
N K ab
0
0
1
1
NL rs
1
0
1
0
Cost
0
1
1
0
Case B. The nodes a and b in GK refer to different nodes in GK a /
b. Due to the bipartite
matching constraint, a value xra xsb 1 represents the situation xra 1 and xsb 1, where
the nodes a and b in GK are mapped to two different nodes, r and s, in the second graph
GL respectively. Then four possible cases for the structure comparison term NK ab N L rs N K ab NL rs exist which result in a cost of either zero or one. These subcases are considered
separately below.
The subcases we have to consider in B include all four possible structural configurations between the two pairs of nodes a, b and r, s and are listed in Table 1. The
two mappings which do not preserve the structure, therefore violating the isomorphism
conditions, result in a cost of one. However, these four cases I–IV are described in more
detail below and we will see that a cost is added for every mapping that results in a difference
between the structure of graph GK and the considered subgraph of the second graph GL .
I If the two nodes a and b in the first graph GK are neighbours, NK ab 1, then no
cost is added in 5.6 if the nodes r and s in the second graph are neighbours too:
N L rs 0.
II Otherwise, if a and b are neighbours in GK , NK ab 1, and the corresponding
nodes r and s are no direct neighbours in the second graph, N L rs 1, then a cost
of 1 is added.
The mappings which correspond to configuration case I and II are visualised in
Figure 3.
III Analogously, the structure comparison term penalises assignments where pairs of
nodes a and b in the graph GK become neighbours r and s in the second graph
GL which were not adjacent before.
IV Finally, if a and b are not adjacent in the first graph GK and the nodes r and s in GL
are also not adjacent, no cost is added.
Figure 4 illustrates the situations III and IV in detail.
The itemisation of these four possible cases shows that only mappings that lead to a
change in the structure are penalised with a cost. Structure preserving mappings which are
compatible with a subgraph isomorphism are without costs and if all mappings are structure
preserving it represents a subgraph isomorphism.
International Journal of Combinatorics
Graph GL
Graph GK
a
xra = 1
b
7
Graph GK
a
Graph GL
xra = 1
r
r
b
xsb = 1
xs ′ b = 1
s
s′
a I: Good assignment no costs
b II: Bad assignment costly
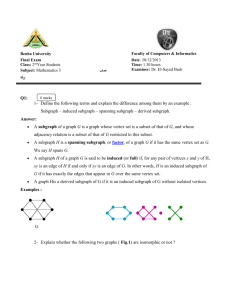
Figure 3: a Case I adjacent nodes a and b in the graph GK are assigned to adjacent nodes r and s in the
graph GL . b Case II adjacent nodes a and b are no longer adjacent in the graph GL after the assignment.
The left mapping leads to no additional costs while the right undesired mapping adds 1 to the total cost.
Graph GK
a
Graph GL
xra = 1
x s′ b = 1
r
Graph GK
a
Graph GL
xra = 1
r
s′
b
a III: Bad assignment costly
b
xsb = 1
s
b IV: Good assignment no costs
Figure 4: a Case III a pair of nodes a and b becomes neighbours r and s after the assignment. This
undesired assignment adds 1 to the costs. b Case IV nodes a and b which are not adjacent in the object
graph GK are assigned to nodes which are also not adjacent in the scene graph GL . This assignment is
associated with no additional cost in 5.6.
Note that due to the symmetry of the adjacency matrices the quadratic cost term x Qx
is symmetric and every difference in the compared structures of the two graphs is considered
twice, resulting actually in a cost of 2 for every difference in the structure.
evaluate the full
Finally, the sum 5.6 and therefore the objective function x Qx
matching encoded in x. And only for matchings which lead to no difference in the mapped
substructure—and vice versa—all the terms within the sum 5.6 are zero. In this case, the
bipartite matching, represented by the vector x, is a subgraph isomorphism.
We wish to emphasise that the minimisation of 5.1 represents the search for a
bipartite matching which has the smallest possible structural deviation between GK and the
considered subgraph of GL . The optimization problem 5.1 can therefore be seen as a graph
edit distance with a cost of 2 for each addition or removal of an edge that is needed to turn the
first graph GK into the considered subgraph of the second graph GL .
6. Example Problem
In the next section we discuss in detail how we obtain the semidefinite relaxation of 5.1. In
order to ease the reproduction of our approach, we illustrate some occurring details based
on the particular subgraph isomorphism problem that is shown in Figure 5. We will also be
8
International Journal of Combinatorics
3
5
6
2
4
3
7
4
2
8
1
1
9
5
6
15
10
7
11
14
12
13
Figure 5: A randomly created subgraph problem instance with K 7 and L 15. The two graphs
are shown along with their binary adjacency matrices. Is there a subgraph isomorphism? For the
shown problem instance we can compute a lower bound larger than 0, which proves that no subgraph
isomorphism is present.
able to conclude from a lower bound larger than 0 that for this problem instance no subgraph
isomorphism can be found.
7. Convex Problem Relaxation
In the following we explain the convex relaxation of the combinatorial isomorphism approach
5.1. It will be relaxed to a convex semidefinite program SDP which has the following
standard form:
LB min,
s.t.
TrQX,
TrAi X ci ,
for i 1, . . . , m, X 0.
7.1
The constraint X 0 means that the matrix X has to be positive semidefinite.
This convex optimization problem can be solved with standard methods like interior point
algorithms see, e.g., 22. Note that the solution of the convex relaxation 7.1 provides
a lower bound LB to the combinatorial optimization problem 5.1. A lower bound with a
value LB > 0 shows that no subgraph isomorphism can be present as the objective value of
5.1, for instance with subgraph isomorphism is zero. Below, we describe in detail how we
derive such a semidefinite program from 5.1.
7.1. SDP Objective Function
In order to obtain an appropriate SDP relaxation for the combinatorial subgraph matching
problem, we start with the reformulation of the objective function of 5.1
Tr x Qx
Tr Qxx
X
.
Tr Q
fx x Qx
7.2
Here we exploited the invariance of the trace operator under cyclic exchange. Besides
xx is positive semidefinite and has rank 1. The objective
being symmetric, the matrix X
and leaving the constraint X
0
function is relaxed by dropping the rank 1 condition of X
untouched. This makes the set of feasible matrices convex see, e.g., 8 and lifts the original
International Journal of Combinatorics
9
NK ⊗ N L N K ⊗ NL for the example subgraph
Figure 6: Here the relational structure matrix Q
isomorphism problem that is shown in Figure 5 is depicted.
problem 5.1 defined in a vector space with dimension KL into the space of symmetric,
positive semidefinite matrices with the dimension KL × KL. We note that the diagonal
reflect the approximation of the vector x which we are searching
elements of the relaxed X
2
for as xi xi is true for 0,1-binary values. We further remark that the computed lower bound
is constraint to be positive semidefinite.
LB in 7.1 can be negative although X
is a binary matrix and the particular matrix which
The relational structure matrix Q
represents the example subgraph isomorphism problem introduced in Section 6 is depicted
in Figure 6. One easily detect the patterns resulting from the Kronecker product formulation
in 5.4. On the fine scale, the pattern of the adjacency matrix of the graph GL can be seen.
The adjacency matrix of the graph GK is present on a larger scale compare the adjacency
matrices in Figure 5.
7.2. SDP Constraints
In the convex relaxation 7.1, we have to incorporate constraints in the form TrAi X ci ,
where Ai and X are matrices and ci ∈ IR is a scalar value. The aim is to approximate the
original constraints as good as possible in this way. Below we describe four different types
a–d of constraint matrices Ai along with their corresponding values for ci that we used
to tighten the relaxation and to approximate the bipartite matching constraints within the
standard SDP formulation 7.1.
a In order to get a tight relaxation, we exploit the fact that xi xi2 holds true for 0,1variables by introducing an additional first row and column in the problem matrix resulting
in matrices Q ∈ IRKL1×KL1 and X ∈ IRKL1×KL1 with the dimension increased by one
and X.
In Q the additional elements were set to zero in order not to change
compared to Q
the value of the objective function. The elements of the new row and the new column in X
are forced to be equal to the corresponding diagonal elements by using the following KL
10
International Journal of Combinatorics
constraint matrices
defined by:
int
int
Aj ∈ IRKL1×KL1 , j 2, . . . , KL 1 which are elements that can be
j
Akl 2δkj δlj − δkj δl1 − δlj δk1
for k, l 1, . . . , KL 1.
7.3
Here we make use of the Kronecker delta δij which is one if i j and zero otherwise.
Note that the Kronecker delta representation allows for an easy creation of the matrices in
any computer programming language. Here each constraint matrix int Aj has only 3 nonzero
elements. The corresponding constraint variables int cj are all zero.
b We restrict the first element in the matrix X to X11 1, using a single additional
constraint matrix one A ∈ IRKL1×KL1 whose elements can be expressed as
one
Akl δk1 δl1
for k, l 1, . . . , KL 1.
7.4
The matrix one A has only one A11 1 as nonzero element and the corresponding
constraint variable one c is 1.
c The equality constraints Lj1 xij 1, i 1, . . . , K, which are part of the bipartite
matching constraints AK x eK represent the constraint that each node of the smaller graph
is mapped to exactly one node of the scene graph. To model these, we define K constraint
matrices sum Aj ∈ IRKL1×KL1 , j 1, . . . , K, which ensure taking the chosen order of the
elements into account that the sum of the appropriate partition of the diagonal elements in
X is 1. Note that we operate on the diagonal elements of X as they reflect the vector x. The
matrix elements for the jth constraint matrix sum Aj can be expressed as follows:
sum
j
Akl jL1
ij−1L1
δik δil
for k, l 1, . . . , KL 1.
7.5
This defines K matrices where the appropriate partition with L consecutive elements
on the diagonal are set to one. All other elements are zero. For these constraints the
corresponding values of sum cj are all 1.
xx ∈ IRKL×KL , where x represents a bipartite matching,
d All integer solutions X
IK ⊗ELL −IL EKK −IK ⊗IL
have zero values at those matrix elements where the matrix Z
has nonzero elements. In order to approximate the bipartite matching constraints we want to
force the corresponding elements in the enlarged matrix X ∈ IRKL1×KL1 to be zero. The
matrices Enn ∈ IRn×n have all elements 1 and In ∈ IRn×n represent the unit matrices. We can
force the elements to be zero with the help of the constraint matrices which we denote Aars ,
They have the
Asab ∈ IRKL1×KL1 and that are determined by the indices a, r,s and s, a, b.
following matrix elements:
Aars
kl δk,aLr1 δl,aLs1 δk,aLs1 δl,aLr1 ,
ab
δk,sKb1
δl,sKa1 δk,sKa1 δl,sKb1,
Askl
with k, l 1, . . . , KL 1.
7.6
International Journal of Combinatorics
11
EKK − IK ⊗ IL IK ⊗ ELL − IL indicates all matrix elements here in
Figure 7: The shown matrix Z
for an example problem of the size K 7,
black that are forced to be zero within the solution matrix X
L 15. A single constraint forces two symmetric elements in the enlarged matrix X to be zero.
The indices a, r, s and s, a, b attain all valid combinations of the following triples where
s > r and b > a:
a, r, s : a 1, . . . , K; r 1, . . . , L; s r 1, . . . , L,
s, a, b : s 1, . . . , L; a 1, . . . , K; b a 1, . . . , K.
7.7
Even if the number of indices is high the structure of a single matrix is fairly simple
as every matrix has only two nonzero elements. For all these constraints the corresponding
constants c have to be zero. With this we get LL−LK/2KK−KL/2 additional constraints
that ensure zero values within the matrix X, where the corresponding elements in Z enlarged
have nonzero values. Therefore TrZX 0 is valid. Note
by one dimension compared to Z
that each constraint forces two elements in the solution matrix to be zero. The black pixels
in the matrix shown in Figure 7 indicate all the elements that are forced to be zero for the
example problem with K 7 and L 15.
Altogether this sums up to LL − LK/2 KK − KL/2 KL K 1 constraints of
the form TrAi X ci within the convex semidefinite problem formulation 7.1. By solving
the convex relaxation 7.1 we get a lower bound to the combinatorial optimization problem
5.1.
7.3. Computational Effort
The most computational effort within the SDP approach is needed for the computation of
the solution of the SDP relaxation 7.1. We used external SDP solvers for this task. An
independent benchmarking for several SDP solvers can be found in 23. A comparison of
three SDP solvers DSDP 19, PENSDP 20 and CSDP 18 on the basis of our own data is
12
International Journal of Combinatorics
Table 2: Mean computation time for three SDP solvers needed to solve the SDP relaxations of our experiments. The CSDP-solver fits best our needs.
Problem size K/L
7/15
CSDP 6.0.1
13.9 ± 1.2s
DSDP 5.8
17.7 ± 1.9s
PENSDP 2.2
19 ± 2s
shown in Table 2. There we compared the mean computation time needed to solve the SDP
relaxations for random problems of the size K 7 and L 15. The comparison was made on
a 2.8 GHz PC with 2 GB storage. We found that the CSDP-solver fits best our needs.
The CSDP-solver is a variant of the predictor corrector algorithm suggested by
Helmberg et al. 24 and is described in detail in 18. Below we sketch the storage
requirement and the computational time for this solver.
7.4. Storage Requirement
In 25 the author points out that the CSDP-solver requires approximately
8 m2 11 n21 n22 · · · n2s
7.8
bytes of storage. Here m is the number of constrains and n21 , n22 , . . . , n2s are the sizes of block
diagonal matrices used to describe the n×n problem and solution matrices of the semidefinite
program. In our case we have n1 n2 · · · ns 1 with s n. In terms of the graph sizes K
and L we have
n KL 1,
m1K
K 2 L KL2
.
2
2
7.9
Using that, we compute that a subgraph matching problem instance with K 7 and
L 15 needs about 10 MB while a problem instance with K 9 and L 14 already needs
17 MB of storage.
According to 18 the most difficult part in an iteration of the CSDP solver is
the computation of the Cholesky factorisation of a m × m matrix which requires a time
proportional to Om3 . This result is based on the here fulfilled assumption that individual
constraint matrices have O1 nonzero elements and that m is somewhat larger than n.
8. Relation to the Maximum Clique Formulation
In this section we discuss the connections that can be drawn between our subgraph
isomorphism approach and the maximum clique formulation for finding a maximum
common subgraph isomorphism. Details about the maximum clique search in arbitrary
graphs can be found for example in 14, 15, 26 and references therein. For our discussion
we introduce and use the following abbreviations. We denote the adjacency matrix of the
association graph, which is introduced to transform the maximum common subgraph problem
International Journal of Combinatorics
13
into a maximum clique problem, with A NK ⊗ NL N K ⊗ N L . This is equivalent to the
elementwise expression
Ara,sb 1 − NK ab − NL rs 2 , for a / b, r / s,
0,
otherwise,
8.1
that is, for example, provided in 15. This can be seen by rewriting the Kronecker product
representation of A directly into the elementwise expression Ara,sb NK ab NL rs 1 −
NK ab −δab 1−NL rs −δrs and exploiting that for 0,1-binary elements Nij Nij 2 is true.
We use Q NK ⊗N L N K ⊗NL for the structure matrix and Z EKK −IK ⊗IL IK ⊗ELL −
IL for the indicator matrix, where the integer solution—holding the bipartite matching
constraints—is expected to have zero values compare also Figure 7. Furthermore, the unit
matrix is denoted by I IK ⊗ IL and E EKK ⊗ ELL is the matrix with all elements one.
Note that all the involved matrices have a dimension of KL × KL. Using these abbreviations
one finds the following connection between the matrices involved in the maximum clique
formulation A and I and our SDP-approach Q and Z:
E Q Z A I.
8.2
Equation 8.2 shows explicitly the complementary nature of the matrices in the
SDP approach and the maximum clique formulation. We can rewrite the combinatorial
minimisation problem 5.1 as
min,
x
x Qx x Zx,
s.t., AK x eK ,
AL x ≤ e L ,
x ∈ {0, 1}KL ,
8.3
where x Zx 0 is guaranteed by the bipartite matching constraint. Recall, that the 0,1indicator-vector x ∈ IRKL with length KL has K elements set to one e x K, a single
one within each consecutive segment of length L. Exploiting this, we obtain x Ex K 2 and
x Ix K. Then using 8.2 we find
x Ex − x Ix K 2 − K x Q Zx x Ax,
8.4
and due to the fixed value on the left-hand-side of 8.4 minimizing x Q Zx is equivalent
to maximising x Ax with the same constraints for x. Therefore, maximising x Ax holding
the bipartite matching constraint is the search for a set of nodes with size K that deviates
the least from a clique. In the maximum clique problem, that arises from the largest common
subgraph problem, one is searching for a 0,1-vector x that indicates the nodes belonging to the
maximum clique. Thereby making no further assumptions about the constraints. However,
from the construction of the association graph from the largest common subgraph problem,
one finds that the largest clique w that can be found in the association graph in the presents
of a full subgraph isomorphism has w K members and that the obtained indicator vector
will hold the bipartite matching constraint. That becomes clear as two nodes in the association
graph that violate the bipartite matching constraints are not connected the adjacency matrix
14
International Journal of Combinatorics
A has zero elements where Z has elements one. and therefore cannot be part of the same
clique. That means also, that the reformulation of the largest common subgraph problem into
a maximum clique problem for graphs GK and GL with K ≤ L has a trivial upper bound of K
for the largest clique size w. Using the SDP relaxation 7.1 and that TrZX 0 we obtain a
lower bound LB for x Q Zx which we can use in 8.4 and get the following expression:
1−
1
K
−
x Ax
LB
≥
.
2
K
K2
8.5
Knowing from the Motzkin Straus theorem 27 or see, e.g., 26 that maxx Ax/K 2 1 − 1/K holds exactly if there is a maximum clique with size K indicated by a binary
vector x, we see that a positive lower bound LB > 0 shows that a clique with K nodes in
the association graph cannot be found meaning also that no full subgraph isomorphism can
be found in the original problem. Computing the following upper bounds for the clique-size
of the unconstraint maximum clique search that were, for example, used in 26:
w≤
3
9 8m − n
UB1 ,
2
8.6
w ≤ ρA 1 UB2 ,
8.7
w ≤ N−1 1 UB3 ,
8.8
w ≤n−
rank A
UB4 ,
2
8.9
one finds that these are largely above the bound w ≤ K which is inherent in the reformulation
of the largest common subgraph problem into a maximum clique problem. In the experiment
section we will see that the bounds for the clique size are not even close to the trivial bound
arising from the largest common subgraph problem reformulation. Of course they are still
useful for the general maximum clique problem of arbitrary graphs. We used the same
notation as the authors in 14 and 26. Therefore, ρA is the spectral radius of the adjacency
matrix A of the association graph, n KL is the number of nodes and m the number of edges
in the association graph and δ 2m/n2 is the density of ones in A. Furthermore, N−1 denotes
the number of eigenvalues of A that are smaller or equal to minus one −1 and A E − A − I
is the inverse/complementary adjacency matrix. Computing these bounds for our example
subgraph matching problem see Section 6, one obtains largest upper bounds for the clique
size in the range from 35 to 61 see also the bounds listed in Table 3 which is far above
the trivial bound of 7. Note that the computed upper bounds approximately agree with the
results for this density δ 0.346 in 26. However, the lower bound LB 0.855 > 0 proves
that the maximum clique size is lower than K 7 which accounts for a tight upper bound
w ≤ 6. As the clique-based upper bounds 7.1–8.9 are largely above the trivial bound
w ≤ 7 this suggests that additional knowledge in the clique formulation namely the bipartite
matching constraints for this particular problem-formulation can and should be exploited to
improve the upper bounds. We summarise our results/experiments in the next section.
International Journal of Combinatorics
15
Table 3: Bounds for the example problem. The largest clique that can be obtained in the related maximum
clique problem is w 6 and the lower bound LB 0.855 > 0 translates to the fact that the size of the
maximum clique must be lower than K 7, providing a tight upper bound ubnd w ≤ 6.
K
7
n KL
105
δ
0.346
w
6
LB 7.1
0.855
UB1 8.6
61.602
UB2 8.7
38.344
UB3 8.8
35
UB4 8.9
52.50
Table 4: Summarisation of the results. We performed 1000 NExp. random subgraph experiments from
which 661 NnoIso. instances are known to have no subgraph isomorphism. The column denoted with
Nfailed shows how often the bound was not tight enough to detect that no subgraph isomorphism can
be found. In Nbnd>0 cases the bound is tight enough. Without preprocessing the problem matrix size is
n × n KL 1 × KL 1 106 × 106 while with the described pruning the size varies from problem
instance to problem instance. However the mean problem matrix is reduced to about 69 × 69 n × n.
Preproc.
Non
Pruning
K/L
7/15
7/15
NExp.
1000
1000
NnoIso.
661
661
n×n
106 × 106
69 × 69
Nbnd>0
123 ≈19%
327 ≈49%
Nbnd≤0
877
673
Nfailed
538
334
9. Results to the Non-Isomorphism Bound
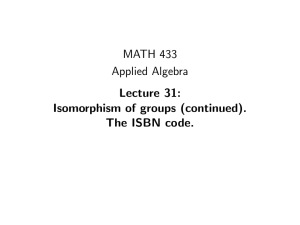
For the illustrative example see Figure 5 we computed a lower bound LB 0.855 > 0 using
the SDP relaxation 7.1, which proves that a subgraph isomorphism does not exist in this
problem instance. The bound and optimal values along with the distribution of the objective
values for that problem are shown in Figure 8. Note that the objective values of 5.1 that can
can only have values
be attained are restricted to discrete values as the quadratic term αx Qx
which are multiples of 2α. With α 1.0 the optimal objective value is 2.0. Note that we did not
apply any preprocessing like the elimination of mappings that could not lead to a subgraph
isomorphism for the illustrative example.
For a further investigation of the bound 7.1, we created 1000 connected random
subgraph matching problem instances for which we have chosen the size of the two graphs
GK and GL to be K 7 and L 15. The edge probability of the graph GK was set to 0.5
and the probability for an edge in the second graph was set to 0.2. The ground truth for these
experiments were computed using the VFlib 28.
The experiments reveal that for various problem instances, the relaxation is tight
enough to conclude that no subgraph isomorphism can exist. We obtained 123 problem
instances with a lower bound LB > 0 which proves that no subgraph isomorphism can occur
in these problem instances. The other 877 problem instances have a lower bound LB ≤ 0. From
the ground truth data we know that for 538 of these problem instances the combinatorial
optimum is larger than 0 indicating that for these cases the relaxation is not tight enough to
detect that a subgraph isomorphism cannot be found. These results are summarised in Table 4
in the row labeled with “non-” preprocessing. The upper bounds for the equivalent maximum
clique formulation of the same 1000 problems are all largely above the trivial bound of K 7
that is inherent in the problem formulation see Table 5 and in no case this allows to prove
that no subgraph isomorphism can occur.
In the next section we investigate the improvements to the bound computation
when mappings are removed from the problem formulation that cannot lead to a subgraph
isomorphism.
16
International Journal of Combinatorics
Probability density
Probability distribution of the objective function values
Graph: K = 7, L = 15, α = 1
0.2
0.15
0.1
∗
= 0.855
fbound
∗
= 40
fmax
∗
fopt
=2
0.05
0
0
8
16
24
32
40
Objective value
Figure 8: The distribution of the objective values for the subgraph isomorphism problem which is shown
can only
in Figure 5. The objective values are restricted to discrete values, as the quadratic term αx Qx
attain values which are multiples of 2α. With α 1.0 the optimal objective value is 2.0 and the obtained
lower bound is 0.855 > 0, which is a nonisomorphism proof for this problem instance.
Table 5: None of the upper bounds for the maximum clique size comes close to the trivial bound K 7
that is inherent in the reformulation of the largest common subgraph problem into the maximum clique
problem. The clique bounds are computed for the equivalent maximum clique formulation of the same
1000 problems used in Table 4.
Bound
UB1
UB2
UB3
UB4
K/L
7/15
7/15
7/15
7/15
Mean bound
66.00 ± 3.32
44.06 ± 3.88
40.09 ± 2.80
52.55 ± 0.19
Min.
53.31
30.69
32
52.50
Max
74.55
54.34
54
54.50
9.1. Towards Larger Problem Instances
We implemented a simple pruning technique to reduce the dimension of the SDP problem
size. The basic idea of this is to eliminate all mappings i → j for which the degree the number
of incident edges of a node i in the first graph is larger than the degree of node j in the
second graph. Such a mapping cannot lead to a subgraph isomorphism. The computational
advantage is that every removed mapping reduces the dimension of the problem matrix
by one n × n → n − 1 × n − 1 and also allows to remove the corresponding constraints
from the semidefinite problem. A feasibility test then checks whether the remaining mapping
opportunities can still lead to a bipartite matching such that all nodes of the smaller graph
can be mapped to different nodes in the larger graph. Note that such an infeasible situation
might also results in an infeasible semidefinite problem formulation. For this pruning
approach one has to keep in mind that the new bound of the remaining problem does not
necessarily represent a lower bound of the original problem. This is because in the case of
a nonisomorphism a removed mapping could be part of the matching which belongs to the
global optimum of the original problem. In fact the combinatorial optimum for the remaining
problem can only increase or stay the same and the computed bound is a lower bound to
the new problem only. However, for problem cases with an isomorphism the optimum does
not change it is still zero and therefore a bound LB > 0 of the new problem still proves that
an isomorphism cannot exist.
Applying the above-described technique to the problem instances in the previous
section, the size of the SDP problem matrices reduces from 106 × 106 KL 1 × KL 1 to
International Journal of Combinatorics
17
69 × 69 in the mean. The number of cases where the relaxation is not tight enough improved
from 538 to 334 out of 661 cases with a combinatorial optimum larger than 0 see also the
second row in Table 4.
We expect that the bound could be slightly tightened by including also the L
inequalities in the SDP relaxation that are currently not considered. However, first findings
indicate that the influence might be negligible which could be caused due to the fact that they
are already modeled by the incorporated constraints. Another computational improvement
within the SDP algorithms could result from an exploitation of the highly regular structure
within the SDP matrix.
10. Discussion
In this paper we proposed a convex relaxation bound to the subgraph isomorphism problem
and showed that the bound is not only of theoretical interest but also applies to several
instances of subgraph matching problems. It would be interesting to investigate which
criteria a subgraph matching problem has to fulfill to result in a tight relaxation. Such insights
could be useful in the process of creating or obtaining object graphs from images for object
recognition tasks. At the current stage, reasonable tight bounds result from semidefinite
problems with a problem matrix size of up to 200 × 200 elements. An improvement of the
proposed method could be expected when also the inequalities are included in the SDP
relaxation. However, for increasing problem instances the relaxation will get less tight and a
lower bound not larger than zero becomes more likely. But note that even less tight solutions
in practice still lead to good integer solutions see, e.g., 11.
Acknowledgments
This research was partly supported by Marie Curie Intra-European Fellowships within the
6th European Community Framework Programme and an Alain Bensoussan Fellowship from
the European Research Consortium for Informatics and Mathematics ERCIM.
References
1 J. R. Ullmann, “An algorithm for subgraph isomorphism,” Journal of the Association for Computing
Machinery, vol. 23, no. 1, pp. 31–42, 1976.
2 H. G. Barrow and R. M. Burstall, “Subgraph isomorphism, matching relational structures and
maximal cliques,” Information Processing Letters, vol. 4, no. 4, pp. 83–84, 1976.
3 B. T. Messmer and H. Bunke, “A new algorithm for error-tolerant subgraph isomorphism detection,”
IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 20, no. 5, pp. 493–504, 1998.
4 D. Eppstein, “Subgraph isomorphism in planar graphs and related problems,” Journal of Graph
Algorithms and Applications, vol. 3, no. 3, pp. 1–27, 1999.
5 H. Bunke, “Error correcting graph matching: on the influence of the underlying cost function,” IEEE
Transactions on Pattern Analysis and Machine Intelligence, vol. 21, no. 9, pp. 917–922, 1999.
6 A. Sanfeliu and K. S. Fu, “A distance measure between attributed relational graphs for pattern
recognition,” IEEE Transactions on Systems, Man and Cybernetics, vol. 13, no. 3, pp. 353–362, 1983.
7 Y.-K. Wang, K.-C. Fan, and J.-T. Horng, “Genetic-based search for error-correcting graph isomorphism,” IEEE Transactions on Systems, Man, and Cybernetics, Part B, vol. 27, no. 4, pp. 588–597, 1997.
8 H. Wolkowicz, R. Saigal, and L. Vandenberghe, Eds., Handbook of Semidefinite Programming, Kluwer
Academic Publishers, Boston, Mass, USA, 2000.
18
International Journal of Combinatorics
9 M. X. Goemans and D. P. Williamson, “Improved approximation algorithms for maximum cut and
satisfiability problems using semidefinite programming,” Journal of the Association for Computing
Machinery, vol. 42, no. 6, pp. 1115–1145, 1995.
10 J. Keuchel, C. Schnörr, C. Schellewald, and D. Cremers, “Binary partitioning, perceptual grouping,
and restoration with semidefinite programming,” IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 25, no. 11, pp. 1364–1379, 2003.
11 C. Schellewald and C. Schnörr, “Probabilistic subgraph matching based on convex relaxation,” in
Proceedings of the 5th International Workshop on Energy Minimization Methods in Computer Vision and
Pattern Recognition (EMMCVPR ’05), vol. 3757 of Lecture Notes in Computer Science, pp. 171–186, 2005.
12 H. Yu and E. R. Hancock, “Graph seriation using semi-definite programming,” in Proceedings of the
5th IAPR International Workshop on Graph-Based Representations in Pattern Recognition (GbRPR ’05), vol.
3434 of Lecture Notes in Computer Science, pp. 63–71, 2005.
13 M. Agrawal and L. S. Davis, “Camera calibration using spheres: a semi-definite programming
approach,” in Proceedings of the 9th IEEE International Conference on Computer Vision (ICCV ’03), vol.
2, pp. 782–789, 2003.
14 I. M. Bomze, M. Budinich, P. M. Pardalos, and M. Pelillo, “The maximum clique problem,” in Handbook
of Combinatorial Optimization, D.-Z. Du and P. M. Pardalos, Eds., pp. 1–74, Kluwer Academic, Boston,
Mass, USA, 1999.
15 M. Pelillo, “Replicator equations, maximal cliques, and graph isomorphism,” Neural Computation, vol.
11, no. 8, pp. 1933–1955, 1999.
16 M. R. Garey and D. S. Johnson, Computers and Intractability, A Guide to the Theory of NP-Completeness,
W. H. Freeman and Company, San Francisco, Calif, USA, 1991.
17 P. M. Pardalos and S. A. Vavasis, “Quadratic programming with one negative eigenvalue is NP-hard,”
Journal of Global Optimization, vol. 1, no. 1, pp. 15–22, 1991.
18 B. Borchers, “CSDP, a C library for semidefinite programming,” Optimization Methods and Software,
vol. 11, no. 1, pp. 613–623, 1999.
19 S. J. Benson and Y. Ye, “DSDP3: dual scaling algorithm for general positive semidefinite
programming,” Tech. Rep. ANL/MCS-P851-1000, Argonne National Labs, 2001.
20 M. Kočvara and M. Stingl, “Pennon: a code for convex nonlinear and semidefinite programming,”
Optimization Methods & Software, vol. 18, no. 3, pp. 317–333, 2003.
21 A. Graham, Kronecker Products and Matrix Calculus with Applications, Ellis Horwood and John Wiley &
Sons, 1981.
22 Y. Ye, Interior Point Algorithms: Theory and Analysis, John Wiley & Sons Inc., New York, NY, USA, 1997.
23 H. D. Mittelmann, “An independent benchmarking of SDP and SOCP solvers,” Mathematical
Programming Series B, vol. 95, no. 2, pp. 407–430, 2003.
24 C. Helmberg, F. Rendl, R. J. Vanderbei, and H. Wolkowicz, “An interior-point method for semidefinite
programming,” SIAM Journal on Optimization, vol. 6, no. 2, pp. 342–361, 1996.
25 Brian Borchers. CSDP 4.8 User’s Guide, 2004.
26 M. Budinich, “Exact bounds on the order of the maximum clique of a graph,” Discrete Applied
Mathematic, vol. 127, no. 3, pp. 535–543, 2003.
27 T. S. Motzkin and E. G. Straus, “Maxima for graphs and a new proof of a theorem of Turán,” Canadian
Journal of Mathematics. Journal Canadien de Mathématiques, vol. 17, pp. 533–540, 1965.
28 L. P. Cordella, P. Foggia, C. Sansone, and M. Vento, “Performance evaluation of the vf graph matching
algorithm,” in Proceedings of the 10th International Conference on Image Analysis and Processing (ICIAP
’99), p. 1172, IEEE Computer Society, Washington, DC, USA, 1999.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014